TITRE : CONTROLE DES ZONES SOUS SUPPORTS DE …
9
1 TITRE : CONTROLE DES ZONES SOUS SUPPORTS DE TUYAUTERIES PAR LA TECHNIQUE DES ONDES GUIDEES DE COURTE PORTEE AUTEUR : KEWeina – Institut de Soudure CO-AUTEURS : BITTENDIEBEL Sylvie - Institut de soudure, CENCE Michel - Institut de Soudure Industrie, LEPILLER Fabien - Institut de soudure industrie, SELLIER Sébastien - Institut de Soudure Industrie COINFERENCIER : KEWeina – Institut de Soudure RESUME Du fait des problèmes d'accessibilité, le contrôle non destructif de la zone sous support nécessitait jusqu’à présent le levage des lignes. Avec le développement de la technique des ondes ultrasonores guidées (OUG), une solution alternative fiable apparaît. Cette technique permet un contrôle à distance et est de plus en plus utilisée pour contrôler de grande longueur de tuyauterie. La distance de contrôle peut, dans le meilleur des cas, atteindre une centaine de mètres. On parle alors d’ondes guidées de longue portée (OUG – L). Technique complémentaire de cette dernière, la technique d'ondes guidées de courte portée (OUG – C), basée sur le mode multi-bond et les ondes guidées, apporte une solution performante et plus précise pour l’examen de zones ciblées d’une ligne ou pour la recherche de défauts spécifiques. Parmi les applications potentielles, le contrôle des zones sous support est un exemple typique. Nous présenterons ici les développements en ondes guidées de courte portée (OUG – C) réalisés à l’Institut de Soudure pour ce type d’application. 1 INTRODUCTION Les réseaux de tuyauteries des sites pétrochimiques sont posés par un très grand nombre de supports pour lesquels il est économiquement impossible de réaliser une protection anticorrosion parfaite. Ces supports, de type posage simple ou encerclant, sont soumis à des agressions climatiques et sont susceptibles d’être affectés par une corrosion externe localisée difficile à détecter et à quantifier sans un couteux et contraignant levage de ligne. La recherche et la quantification par ultrasons de zone de corrosion sous supports constitue donc un enjeu fort tant en termes de sureté des installations que de coût de maintenance. Figure 1 : Différents types de posage (coquille, posé, posé + clamp) JOURNEES COFREND 2017
Transcript of TITRE : CONTROLE DES ZONES SOUS SUPPORTS DE …

1
TITRE : CONTROLE DES ZONES SOUS SUPPORTS DE TUYAUTERIES PAR LA TECHNIQUE DES ONDES GUIDEES DE COURTE PORTEE
AUTEUR : KEWeina – Institut de Soudure CO-AUTEURS : BITTENDIEBEL Sylvie - Institut de soudure, CENCE Michel - Institut de Soudure Industrie, LEPILLER Fabien - Institut de soudure industrie, SELLIER Sébastien - Institut de Soudure Industrie COINFERENCIER : KEWeina – Institut de Soudure
RESUME Du fait des problèmes d'accessibilité, le contrôle non destructif de la zone sous support nécessitait jusqu’à présent le levage des lignes. Avec le développement de la technique des ondes ultrasonores guidées (OUG), une solution alternative fiable apparaît. Cette technique permet un contrôle à distance et est de plus en plus utilisée pour contrôler de grande longueur de tuyauterie. La distance de contrôle peut, dans le meilleur des cas, atteindre une centaine de mètres. On parle alors d’ondes guidées de longue portée (OUG – L). Technique complémentaire de cette dernière, la technique d'ondes guidées de courte portée (OUG – C), basée sur le mode multi-bond et les ondes guidées, apporte une solution performante et plus précise pour l’examen de zones ciblées d’une ligne ou pour la recherche de défauts spécifiques. Parmi les applications potentielles, le contrôle des zones sous support est un exemple typique. Nous présenterons ici les développements en ondes guidées de courte portée (OUG – C) réalisés à l’Institut de Soudure pour ce type d’application.
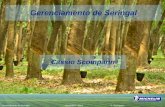
1 INTRODUCTION Les réseaux de tuyauteries des sites pétrochimiques sont posés par un très grand nombre de supports pour lesquels il est économiquement impossible de réaliser une protection anticorrosion parfaite. Ces supports, de type posage simple ou encerclant, sont soumis à des agressions climatiques et sont susceptibles d’être affectés par une corrosion externe localisée difficile à détecter et à quantifier sans un couteux et contraignant levage de ligne. La recherche et la quantification par ultrasons de zone de corrosion sous supports constitue donc un enjeu fort tant en termes de sureté des installations que de coût de maintenance.
Figure 1 : Différents types de posage (coquille, posé, posé + clamp)
JOURNEES COFREND 2017

2
Les techniques classiques d'essais non destructifs par ultrasons sont généralement mises en œuvre au ½ bond ou au bond complet afin de limiter les imprécisions de mesure et la dégradation des performances de détection liées à la divergence et à l’atténuation acoustique du faisceau ultrasonore. Ce mode opératoire limite fortement l’utilisation de techniques ultrasonores conventionnelles lorsque les contraintes d'accessibilité ne permettent pas de positionner la sonde à proximité des zones surveillées. Il est néanmoins possible de débloquer cette situation et d’étendre la zone de détectabilité des moyens ultrasonores conventionnels par l’utilisation de techniques multibonds ou d’ondes ultrasonores guidées (OUG). Lorsque la géométrie et la perméabilité acoustique de l’élément contrôlé autorisent leur propagation (Plaque, tuyauterie, barre) les OUG sont susceptibles de permettre la détection d’endommagements sur de grandes distances. Les techniques d'ondes guidées commerciales utilisent le mode SH non dispersif (ondes transversales à polarisation horizontale) à des fréquences relativement basses pour détecter d’éventuels changements de section de la paroi des tuyauteries sur une distance pouvant aller jusqu’à plusieurs dizaines de mètres, ainsi que certains modes de torsion pour aider à l’analyse des résultats. En ce qui concerne l’examen de zones sous supports, les distances entre la sonde et la zone surveillée sont de l’ordre du mètre ; plus longues que les distances associées aux examens UT conventionnels mais largement inférieure à celles généralement associées aux ondes guidées. Dans l’industrie, la technique d'essai la plus éprouvée et la plus utilisée est la technique multibonds basée sur des moyens UT conventionnels. La détection des indications de défauts est basée sur l’étude de l’atténuation de l'amplitude et des modifications de temps de vol des signaux ultrasonores. Les performances de détection de cette technique sont similaires à celles des examens UT conventionnels et comme pour les UT conventionnels, la mise en œuvre de cette technique nécessite une préparation de surface permettant d’assurer une qualité de couplage optimale. La technique par ondes ultrasonores guidées peut également être utilisée. Mais contrairement à sa mise en œuvre dans son domaine d’application habituel la recherche de corrosion sous supports nécessite la réduction de la distance de propagation et une augmentation de la résolution de l’examen. POUR ces raisons le choix a été fait d’étudier la faisabilité de l’examen en utilisant des ondes de LAMB guidées de fréquences comprises entre 200 KHz et 4 MHz générées par des transducteurs électromagnétiques commerciaux (EMAT – Electro Magnetic Acoustic Transducer). Les transducteurs EMAT combinent les avantages des modes multibonds et ondes de Lamb guidées en permettant la production simultanée d’ondes transversales et d’ondes de Lamb avec le même traducteur sans nécessiter de couplage et de préparation de surface contraignante. Ce document présente les résultats de nos recherches.
2 PRINCIPES 2.1 Transducteurs EMAT Le transducteur électromagnétique (EMAT) permet de générer et de recevoir un signal ultrasonore sans couplage dans des matériaux métalliques. Les champs mécaniques alternatifs ultrasonores sont le résultat de l’effet des forces de Lorentz et/ou magnétostrictives (en fonction des propriétés physiques des matériaux) générées par induction électromagnétique. Les distributions du champ acoustique correspondent aux distributions des champs magnétiques et électriques et décident du type d’onde ultrasonore généré (ondes volumétriques, ondes de Rayleigh ou ondes guidées).

3
Les champs électriques sont générés à l'aide de différents types de bobines et le champ magnétique à l'aide de différents types d'aimants. Le tableau ci-dessous, cité dans le catalogue d'INNERSPEC® [1], donne quelques exemples de configurations typiques des transducteurs et du type d'onde ultrasonores généré associée.
Type de bobine
Type d’onde Longueur d’onde Configuration
Serpentin ou Spirale
Ondes SH Ondes de cisaillement à polarisation horizontale
Définie en fonction l’espacement des mailles du serpentin et de la taille des aimants
Serpentin Ondes de Rayleigh
Définie en fonction l’espacement des mailles du serpentin
Contrairement aux transducteurs piézoélectriques la fréquence d’un transducteur EMAT est définie en fonction de la projection de la longueur d’onde du signal ultrasonore sur la surface d’émission(en relation directe avec l’espacement des mailles du serpentin et de la taille des aimants de la bobine). 2.2 Dispersion des ondes de plaque La dispersion acoustique est le phénomène par lequel une onde ultrasonore se sépare en composantes de fréquences différentes lorsqu'elle se propage dans un matériau mince en regard de la longueur d’onde [2]. La vitesse de phase de l'onde sonore est considérée comme une fonction de la fréquence. Les différents modes ondulatoires des ondes de plaque sont répartis en 3 familles :
• Mode antisymétrique (Mode A) • Mode Symétrique (Mode S) • Ondes de cisaillement à polarisation horizontale (Mode SH)
La vitesse de phase et la vitesse de groupe des différents modes changent avec le produit de l'épaisseur et de la fréquence, et peuvent être prédites par des courbes de dispersion. Comme le montrent les courbes de dispersion, exceptés les modes de base A0, S0 et SH0 visibles sur tout le spectre fréquentiel, tous les autres modes n’apparaissent qu’au-delà d’une certaine fréquence.

4
Figure 2 - Courbes de dispersion
Pour les applications EMAT, pour une bobine de type serpentin avec un espacement de maille donné, les courbes de dispersion de la vitesse de phase / groupe peuvent être converties de manière à représenter la fréquence d'excitation ou la vitesse de groupe de chaque mode en fonction de l'épaisseur. Un exemple de courbe de dispersion convertie pour bobine de type serpentin avec un espacement de maille de 0,3 pouce est présenté dans la Figure 2 ci-après.
Figure 3 - Courbes de dispersion - Bobine type serpentin - Espacement de maille 0.3’’ Fréquence/Epaisseur
Figure 4 - Courbes de dispersion - Bobine type serpentin - Espacement de maille 0.3’’ – Vitesse de
groupe/Epaisseur
0 5 10 150
0.5
1
1.5
2
2.5
Fréq
uenc
e (M
Hz)
Epaisseur (mm)
0 5 10 150
1
2
3
4
5
6
Epaisseur (mm)
Vite
sse
de g
roup
e (m
m/µ
s)

5
3 MODE OPERATOIRE 3.1 Généralités L’analyse des fichiers d’acquisition EMAT est basée sur l’étude des variations de temps de vol et d’amplitude des signaux ultrasonores. 3.2 Etalonnage de la base de temps L’étude des variations de temps de vol permet de quantifier l’extension en profondeur des dégradations détectées. La célérité ultrasonore des modes ondulatoires utilisés pour l’analyse est établie en fonction des courbes de dispersion théorique calculées pour des tôles planes. La pertinence de l’utilisation des courbes de dispersion théoriques sur tôle plane pour le contrôle de tubes sera vérifiée pour chaque mode. Cette vérification est réalisée en laboratoire en mesurant avec différentes bobines le temps de vol nécessaire pour faire un tour complet d’un tube de diamètre et d’épaisseur connue. Les essais réalisés pour le mode A0 ont montré que les variations des vitesses de groupe n’étaient pas impactées de manière significative par la courbure d’un tube en acier, les mesures expérimentales s’écartant très peu des vitesses de groupe théorique conjecturées par les courbes de dispersion définie pour des tôles planes.
0 5 10 150
2
4
6
8
10
12
14
16
18
20
Fréquence x épaisseur (MHz x mm)
Vite
sse
de p
hase
(mm
/µs)
0 5 10 150
1
2
3
4
5
6
Fréquence x épaisseur (MHz x mm)
Vite
sse
de g
roup
e (m
m/µ
s)

6
3.3 Etalonnage en sensibilité L’étalonnage en sensibilité du système permet de quantifier globalement le degré de sévérité des dégradations détectées. La sensibilité d’examen varie notamment en fonction de la bobine utilisé, des paramètres du poste EMAT (Bande passante, nombre de cycle, fréquence centrale, etc…), du rayon de courbure de l’épaisseur et de l’état de surface du tube. L’étude des variations d'amplitude des signaux ultrasonores n’est pertinente que si l'équipement est réglé pour fonctionner dans sa zone de linéarité en amplitude (Variations d’amplitude proportionnelles aux variations de gain). 3.4 Analyse fréquentielle L’analyse fréquentielle des signaux permet d’affiner et de consolider le diagnostic. 3.5 Principe général L’examen des zones sous supports est réalisé en déplaçant la sonde dans la direction axiale sur une génératrice longitudinale de la tuyauterie. Les ultrasons se propagent dans le sens circonférentiel (à la fois dans le sens horaire et dans le sens anti horaire). Les ondes ultrasonores transitent plusieurs fois par la zone surveillée et sont reçus par la sonde à chaque tour complet de la tuyauterie.
Figure 5 - Principe de sondage
De par leurs principes de propagation les ondes guidées s’atténuent beaucoup plus faiblement que les ondes volumiques. Elles peuvent donc parcourir une distance importante qui peut être mise à profit pour améliorer la sensibilité de détection des dégradations affectant les structures circulaires en renforçant à chaque tour les perturbations du signal.
Examen en zone saine Zone de défaut

7
4 ESSAIS EN LABORATOIRE 4.1 Pièces d’essais Les essais en laboratoire sont réalisés sur des endommagements artificiels calibrés.
25 % de perte d’épaisseur 50 % de perte d’épaisseur 75 % de perte d’épaisseur
4.2 Configurations d’essais Les paramètres de réglages du poste EMAT utilisé pour les essais permettent de générer différents modes d’ondes ultrasonores guidées. Les essais réalisés ont permis de définir des configurations de réglages et des modes opératoires spécifiques de mise en œuvre et d’analyse des signaux en fonction des paramètres géométriques des tuyauteries contrôlées. 4.3 Images types - Mode opératoire Type P1
Zone saine 25% perte d’épaisseur 50% perte d’épaisseur 75% perte d’épaisseur
AScan Analyse
fréquentielle AScan Analyse fréquentielle AScan Analyse
fréquentielle AScan Analyse fréquentielle

8
4.4 Images types - Mode opératoire Type H1 Zone saine 25% perte d’épaisseur 50% perte d’épaisseur 75% perte d’épaisseur
AScan Analyse
fréquentielle AScan Analyse fréquentielle AScan Analyse
fréquentielle AScan Analyse fréquentielle
4.5 Constats Les essais réalisés en laboratoire ont montrés que les modes ondulatoires générés, l’atténuation ultrasonore et les variations de temps de vol des signaux étaient corrélées avec les différentes profondeurs d’endommagement.
5 CONCLUSIONS La technique d’examen par ondes guidées de courte portée générées par EMAT est une application développée par l’Institut de Soudure Groupe pour le contrôle des zones sous supports non interprétables par examen visuel. Elle propose une méthodologie de réglage et d’étalonnage novatrice adaptée aux caractéristiques particulières de propagation des signaux ultrasonores dispersifs et aux spécificités du matériel EMAT. L’analyse des fichiers d’acquisition EMAT est basée sur l’étude des variations de temps de vol et d’amplitude des signaux ultrasonores. Les premières campagnes d’essais menées sur site sur des configurations simples de type supports posés non encerclant sans collage ont permis de corroborer les résultats obtenus en laboratoire tant en termes de performances de détection que de quantification des endommagements. Les grandes possibilités de réglage du matériel utilisé permettent d’élargir le spectre

9
6 REFERENCES [1] Long Range Guided Wave Inspection Usage – Current Commercial Capabilities and Research Directions M.J.S. Lowe and P. Cawley, Department of Mechanical Engineering Imperial College London 29 March 2006 [2] INNERSPEC- Standard Sensors & Accessories for EMAT Applications, Rev. T-SA-D16
[3] Viktorov, I. A. “Rayleigh and Lamb Waves: Physical Theory and Applications”, Plenum Press, New York, 1967.