TrabalhoFinal-Modelagem UFV
8
TRABALHO FINAL – MODELAGEM E IDENTIFICAÇÃO DE SISTEMAS João Francisco Ferreira Lucindo-71324, Eduardo Geike de Andrade-71337, Brayan Mendes Nogueira-71317 Departamento de Engenharia Elétrica - Universidade Federal de Viçosa Viçosa - MG 1 INTRODUÇÃO E OBJETIVO Nesse presente trabalho tem-se o objetivo de modelar uma planta hidráulica didática presente no Departamento de Engenharia Elétrica da Universidade Federal de Viçosa. Essa planta didática consiste num sistema de aquecimento de água, cuja as entradas são a vazão de água ( u 1 ) e a potência elétrica injetada ( u 2 ). A saída desse sistema analisado é a temperatura da água (y), conforme a Figura 1. Figura 1- Planta do sistema em questão 2 METODOLOGIA Para essa modelagem usou-se duas metodologias já consagradas: ARX e a função “tfest” (Transferfunctionestimation). Ambas metodologias já presentes no Matlab. A primeira, no domínio discreto, utiliza a teoria dos mínimos quadrados. A segunda, no domínio contínuo, busca estimar uma função transferência para o sistema estudado.
-
Upload
joao-lucindo -
Category
Documents
-
view
214 -
download
0
description
Modelagem planta hidraulica didática
Transcript of TrabalhoFinal-Modelagem UFV

TRABALHO FINAL – MODELAGEM E IDENTIFICAÇÃO DE SISTEMAS
João Francisco Ferreira Lucindo-71324, Eduardo Geike de Andrade-71337, Brayan Mendes Nogueira-71317
Departamento de Engenharia Elétrica - Universidade Federal de Viçosa Viçosa - MG
1 INTRODUÇÃO E OBJETIVO
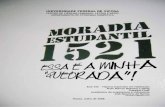
Nesse presente trabalho tem-se o objetivo de modelar uma planta hidráulica didática presente no Departamento de Engenharia Elétrica da Universidade Federal de Viçosa.
Essa planta didática consiste num sistema de aquecimento de água, cuja as entradas são a vazão de água (u1) e a potência
elétrica injetada (u2). A saída desse sistema analisado é a temperatura da água (y), conforme a Figura 1.
Figura 1- Planta do sistema em questão
2 METODOLOGIA
Para essa modelagem usou-se duas metodologias já consagradas: ARX e a função “tfest” (Transferfunctionestimation). Ambas metodologias já presentes no Matlab.
A primeira, no domínio discreto, utiliza a teoria dos mínimos quadrados. A segunda, no domínio contínuo, busca estimar uma função transferência para o sistema estudado.
3 RESULTADOS E DISCUSSÃO
Seja a entrada u1, a vazão de água, dada pela Figura 2:

Figura 2 - Entrada u1 do sistema
A entrada u2,sinal de corrente, dada pela Figura 3:
Figura 3 - Entrada u2 do sistema
E a saída, temperatura da água, dada pela Figura 4:

Figura 3 - Saída y do sistema
Então, aplicando as metodologias já apresentadas, pode-se modelar o sistema das duas formas seguintes:
ARX
Essa metodologia consiste em encontrar os polinômios A (q−1 ) eB (q−1) da equação 1. Onde y (k ) é a saída do sistema, u (k ) a
entrada e w (k ) o ruído. Tomou-se o período de discretização de 1 segundo.
y (k )=q−d B (q−1 )A (q−1 )
u (k )+ 1
A (q−1 )w (k )
(1)
Para tal é preciso definir a ordem desejada para os polinômios A (q−1 ) eB (q−1). Então fez-se todas as combinações possíveis
para esses polinômios utilizando polinômios de grau 1 a 4. Fez-se a modelagem, e obteve-se o seguinte resultado:

Figura 4 - Modelagem do sistema para diversos graus de A (q−1 )e B (q−1)
Observa-se que não houve melhora significativa quanto ao aumento do grau dos polinômios, logo, para fim de simplificações,
escolhe-se o grau 1 tanto para o polinômio A (q−1 )tanto paraB (q−1) , resultando assim numa modelagem com 48.29% de erro
relativo. Assim o modelo ARX é dado por:
Discrete-time ARX model: A(z)y(t) = B(z)u(t) + e(t)
A(z) = 1 - 0.9992 z^-1
B1(z) = -0.0002425
B2(z) = 0.00461
Sample time: 1 seconds

E a comparação da saída desse modelo com a saída medida é apresentada na Figura 6.
Figura 5 - Comparação entre a saída medida e a estimada utilizando o modelo ARX com ambos
os polinômios com grau 1.
Ffest
Essa metodologia consiste em estimar uma função transferência para o sistema. Para tal é também necessário escolher o ordem dessa função transferência. Então, analogamente ao ARX fez-se todas as combinações possíveis para as ordens de 1 a 5 e então fez-se a estimação da função transferência. O resultado obtido é apresentado na Figura 7.
Nota-se que agora há uma diferença significativa quando varia-se a ordem da função transferência e o melhor resultado obtido é quando escolhe-se ambos os graus iguais a 3, resultando em uma modelagem de somente 18.24% de erro relativo.
Para essa escolha de polinômio obteve-se as seguintes funções transferências para o sistema:
From input "u1" to output "y1":
0.0001911 s^2 - 1.414e-06 s + 2.822e-08
exp(-1*s) * --------------------------------------------
s^3 + 0.003666 s^2 + 0.0001345 s + 1.028e-07
From input "u2" to output "y1":
0.007517 s^2 + 5.816e-06 s + 3.515e-08
-------------------------------------------
s^3 + 0.005421 s^2 + 1.92e-05 s + 3.403e-08
Continuous-time identified transfer function.

E o mesmo sistema discretizado:
From input "u1" to output "y1":
0.0001901 z^-1 - 0.0003815 z^-2 + 0.0001915 z^-3
z^(-1) * ------------------------------------------------
1 - 2.996 z^-1 + 2.993 z^-2 - 0.9963 z^-3
From input "u2" to output "y1":
0.007499 z^-1 - 0.01499 z^-2 + 0.007494 z^-3
--------------------------------------------
1 - 2.995 z^-1 + 2.989 z^-2 - 0.9946 z^-3
Sample time: 1 seconds
Cuja resposta às entradas u1e u2 éapresentada a seguir na Figura 8.
Figura 6 - Comparativo entre as saídas modeladas e as medidas, com todas as combinações
possíveis para funções de transferência com 1 a 5 polos.

Figura 7 - Resposta do sistema modelado (azul) às entradas u1e u2, comparadas à entrada medida (cinza)
4 CONCLUSÃO
Após fazer a modelagem do sistema físico em uma função de transferência utilizando os métodos ARX e “tfest” pôde-se perceber que ambos métodos possuem uma resposta com bastante fidelidade à resposta real do sistema.
Como pode-se perceber, a modelagem utilizando o método “tfest” possui uma resposta com um erro menor quando se comparado com a resposta do sistema utilizando o método ARX.
Assim, concluimos que ambos os métodos são de grande importância na modelagem e identificação de sistemas, e que possibilitam de forma simples e clara o estudo de tais sistemas utilizando ferramentas computacionais já presentes nos softwares de engenharia.
REFERÊNCIA BIBLIOGRÁFICA
[1]AGUIRRE, Alan V., “Introdução à identificação de sistemas,” Editora UFMG, 3º. Ed.. [2] OGATA, K., Engenharia de Controle Moderno – 4ª Edição, 2003, Prentice-Hall. (OGATA, 2003).