
TRANSFORMADA DE LAPLACE - lscp.pqi.ep.usp.br · soluÇÃo de modelos usando laplace. r kc. a a a b...
29
1 TRANSFORMADA DE LAPLACE 0 ( ( )) () () st f t fs fte dt ∞ − = = ∫ L 0 0 : ( ) s st st s C C C Ce dt e s s =∞ ∞ − − = = =− = ∫ Constan e t L
Transcript of TRANSFORMADA DE LAPLACE - lscp.pqi.ep.usp.br · soluÇÃo de modelos usando laplace. r kc. a a a b...

1
TRANSFORMADA DE LAPLACE
0
( ( )) ( ) ( ) stf t f s f t e dt∞
−= = ∫L
00
: ( )s
st st
s
C CC Ce dt es s
=∞∞− −
=
= = − =∫Constan e t L
2
TRANSFORMADA DE LAPLACE
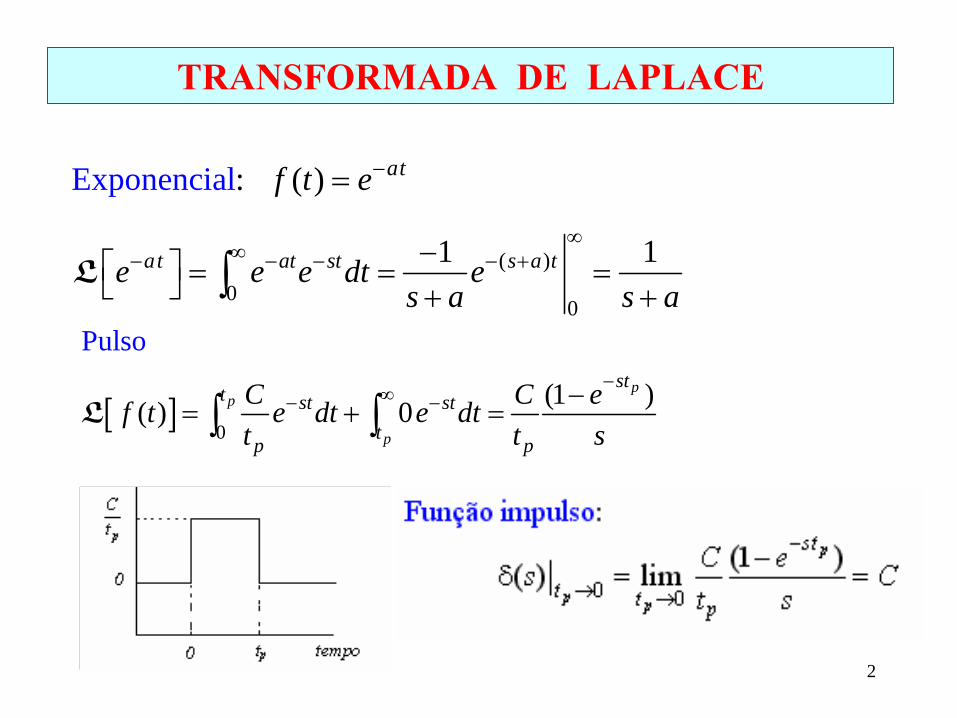
Exponencial: ( ) atf t e−=
( )0
0
1 1at at st s a te e e dt es a s a
∞∞− − − − +−⎡ ⎤ = = =⎣ ⎦ + +∫L
[ ]0
(1 )( ) 0
Pulsop
p
p
stt st st
tp p
C C ef t e dt e dtt t s
−∞− − −
= + =∫ ∫L
3
TRANSFORMADA DE LAPLACE
4
TRANSFORMADA DE LAPLACE
5
TRANSFORMADA DE LAPLACE
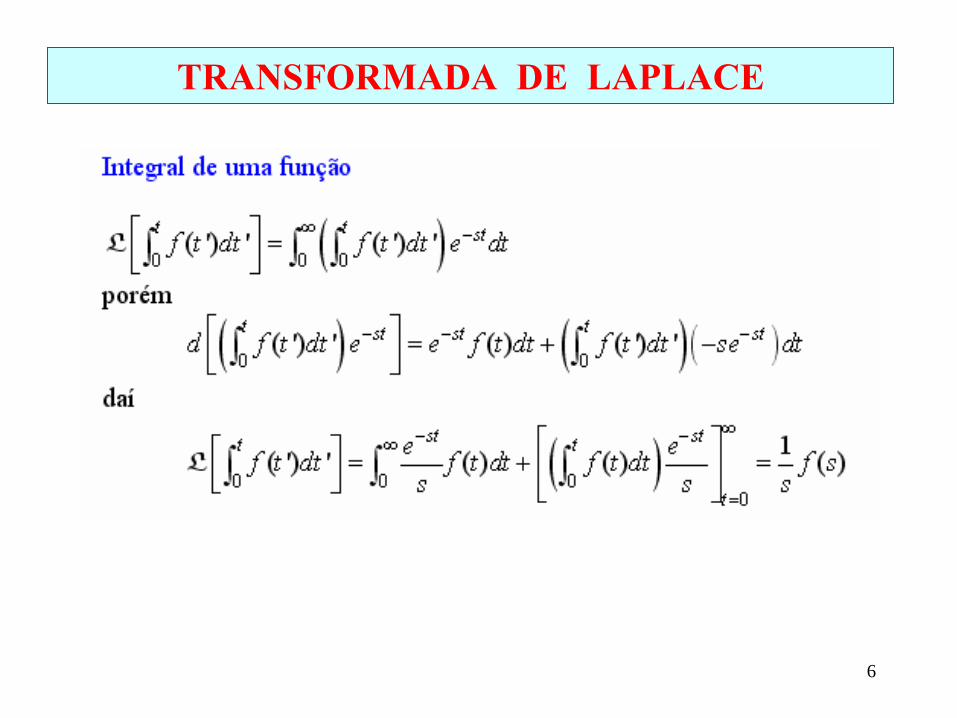
6
TRANSFORMADA DE LAPLACE
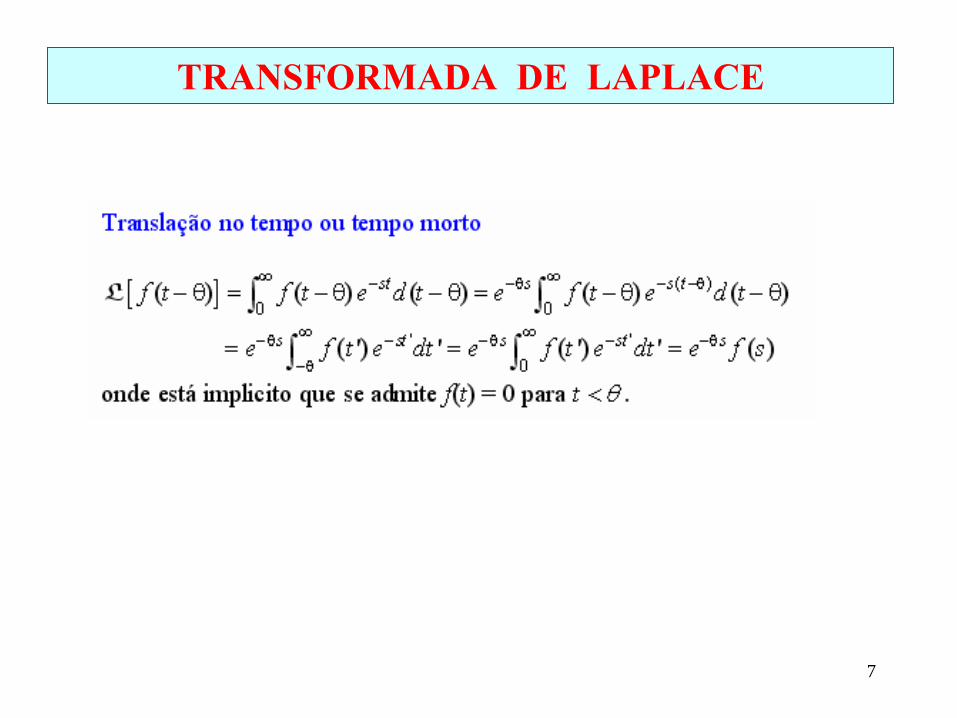
7
TRANSFORMADA DE LAPLACE
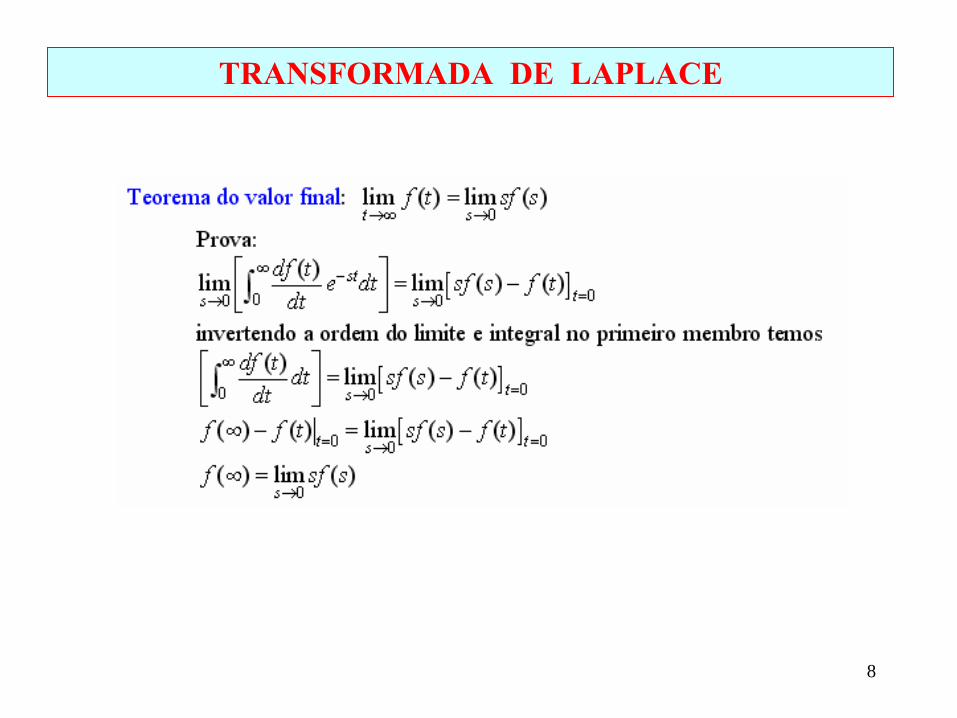
8
TRANSFORMADA DE LAPLACE
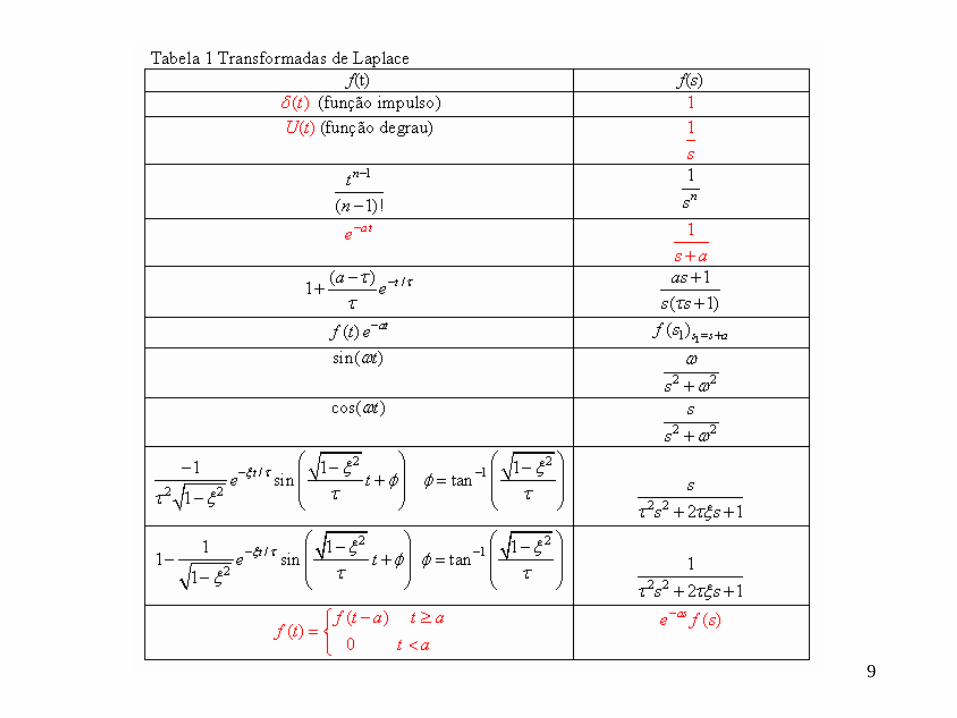
9
10
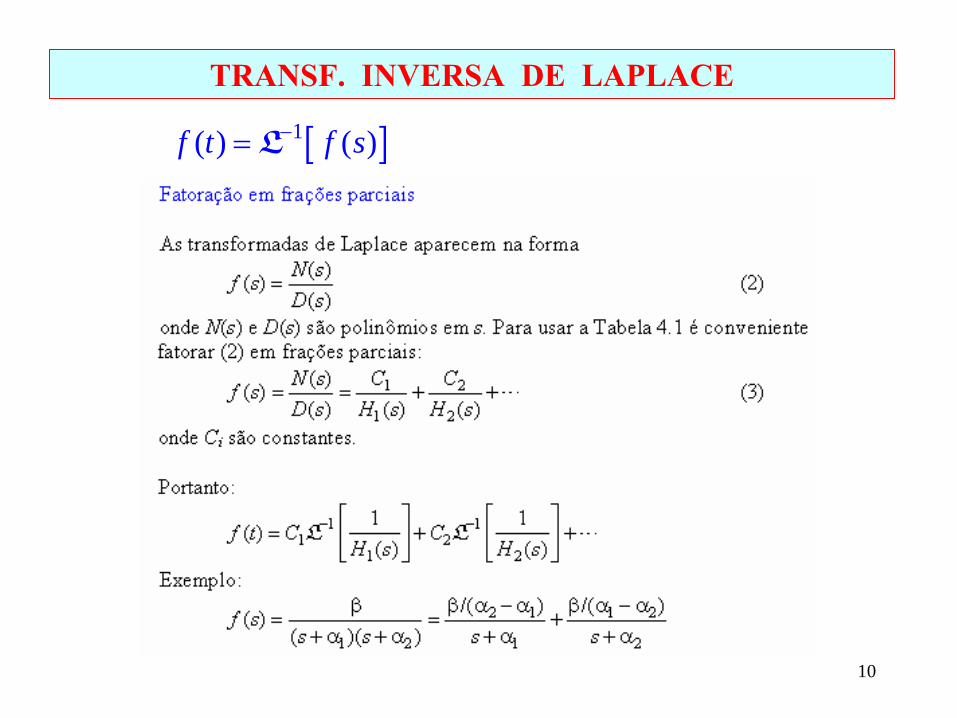
TRANSF. INVERSA DE LAPLACE
[ ]1( ) ( )f t f s−=L

11
TRANSF. INVERSA DE LAPLACE
12
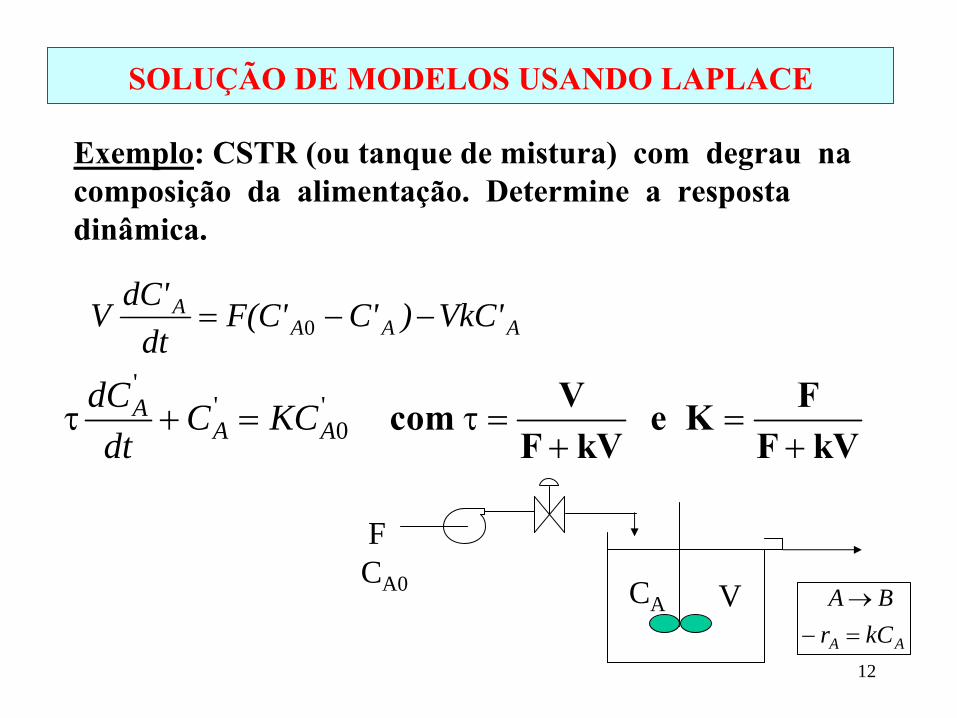
SOLUÇÃO DE MODELOS USANDO LAPLACE
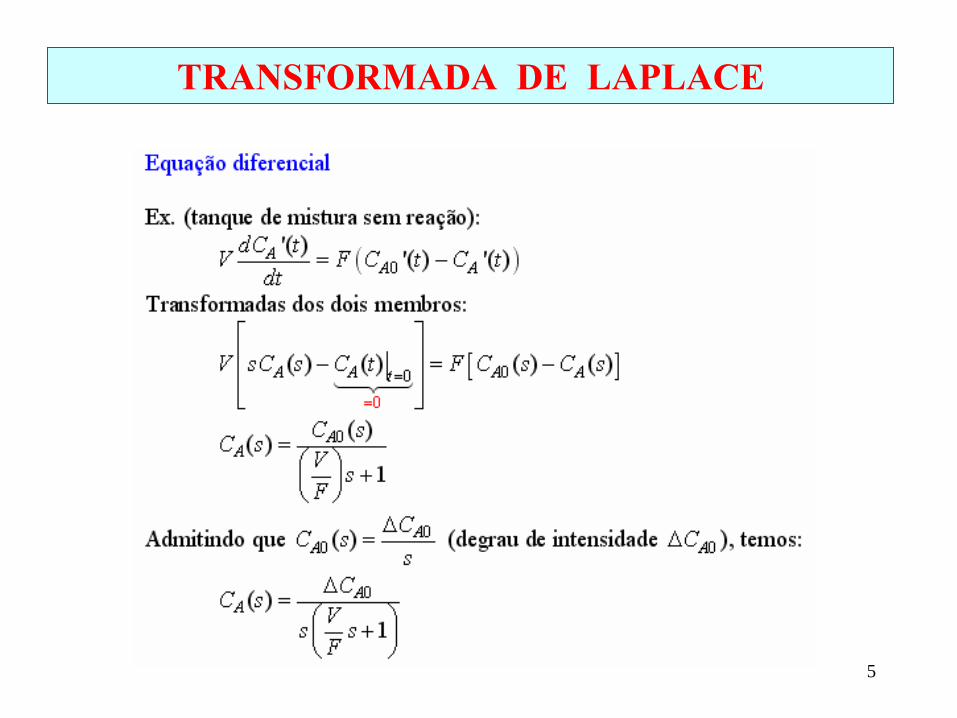
Exemplo: CSTR (ou tanque de mistura) com degrau na composição da alimentação. Determine a resposta dinâmica.
FCA0 VCA
AAAA VkC')C'F(C'
dtdC'V −−= 0
AA kCrBA
=−→
'' '
0V F com e K
F kV F kVA
A AdC C KCdt
τ + = τ = =+ +
13
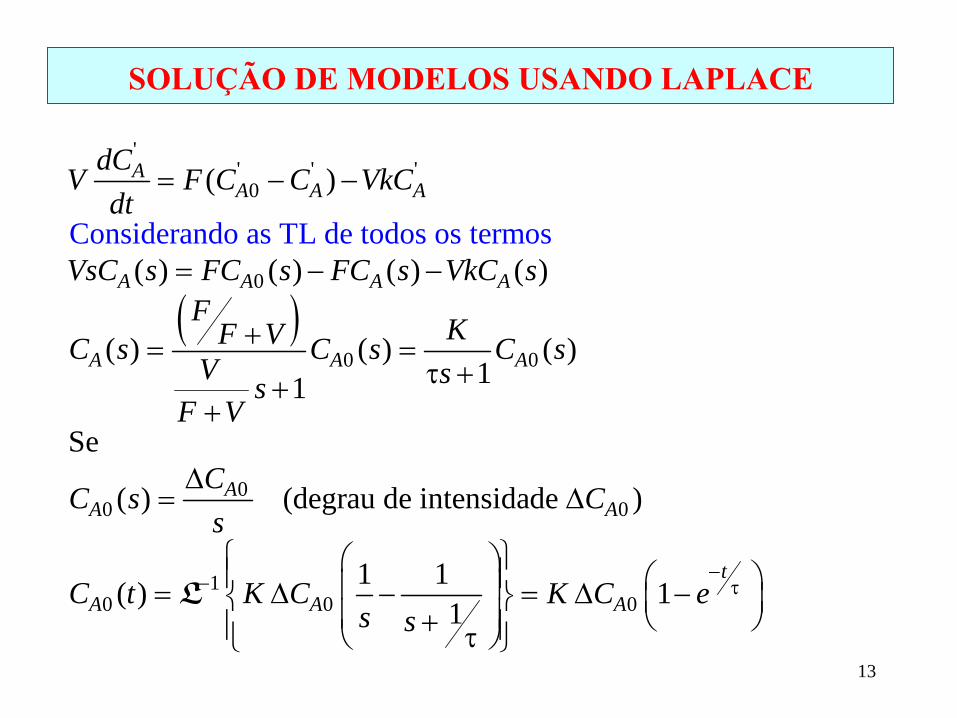
SOLUÇÃO DE MODELOS USANDO LAPLACE
( )
'' ' '
0
0
0 0
00 0
10 0
Considerando as TL de todos os
( )
( ) ( ) ( ) ( )
( ) ( ) ( )11
Se
( ) (degrau de intensidade )
1 1(
e o
1
rm s
)
t
AA A A
A A A A
A A A
AA A
A A
dCV F C C VkCdt
VsC s FC s FC s VkC sF KF VC s C s C sV ss
F V
CC s C
s
C t K Cs s
−
= − −
= − −
+= =τ ++
+
Δ= Δ
⎛ ⎞⎜ ⎟= Δ −⎜ + τ⎝ ⎠
L 0 1t
AK C e−τ
⎧ ⎫⎪ ⎪ ⎛ ⎞= Δ −⎨ ⎬ ⎜ ⎟⎟ ⎝ ⎠⎪ ⎪⎩ ⎭

14
SOLUÇÃO DE MODELOS USANDO LAPLACE
AA kCrBA
=−→
FCA0 V1CA1
V2CA2
Dois CSTRs estão inicialmente no estado estacionário e sofrem uma perturbação degrau na composição da alimentação do primeiro tanque. Resolva para CA2
.
2212
2
1101
1
AAAA
AAAA
VkC')C'F(C'dt
dC'V
VkC')C'F(C'dt
dC'V
−−=
−−=
'''
'''
1222
2
0111
1
AAA
AAA
CKCdt
dC
CKCdt
dC
=+
=+
τ
τ

15
SOLUÇÃO DE MODELOS USANDO LAPLACE
'''
'''
1222
2
0111
1
AAA
AAA
CKCdt
dC
CKCdt
dC
=+
=+
τ
τFCA0 V1CA1
V2CA2
'' '1 1
1 1 1 0 1 01
'' '2 2
2 2 2 1 2 12
( ) ( )1
( ) ( )1
AA A A A
AA A A A
dC KC K C C s C sdt s
dC KC K C C s C sdt s
τ + = ⇒ =τ +
τ + = ⇒ =τ +
2 12 0
2 1( ) ( )
( 1) ( 1)A AK KC s C ss s
=τ + τ +
16
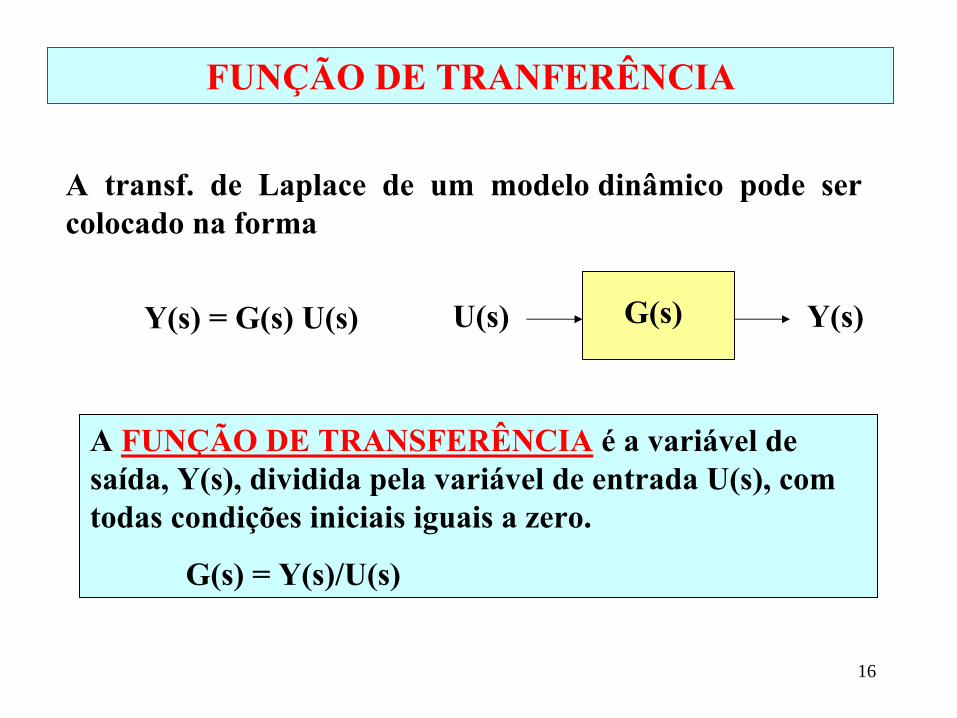
FUNÇÃO DE TRANFERÊNCIA
A transf. de Laplace
de um modelo dinâmico pode ser colocado na forma
Y(s)U(s) G(s)Y(s) = G(s) U(s)
A FUNÇÃO DE TRANSFERÊNCIA
é
a variável de saída, Y(s), dividida pela variável de entrada U(s), com todas condições iniciais iguais a zero.
G(s) = Y(s)/U(s)

17
FUNÇÃO DE TRANFERÊNCIA : MODELOS VALIDOS PARA QUALQUER INPUT
Y(s)U(s) G(s)G(s) = Y(s)/ U(s)
• Como conseguimos condições iniciais nulas para qualquer modelo?
• As variáveis são desvios?
• O modelo só
vale para degrau?
• Como ficam os modelos não-lineares?
• Quantos inputs e outputs?

18
COMBINANDO MODELOS DE FUNÇÃO DE TRANSFERÊNCIA
T
30 ( ) /( ) 0.10 %( )valveF s m hG s abertv s
= =
31
tank10
1 2 250 1
T ( s ) . K / m / hG ( s )F ( s ) s
−= =
+
130001
1
2
+==
sKK
sTsTsG / .)()()(tank2 110
012
+=
=
sKK
sTsTsG measured
sensor
/ .
)()()(
(Time in seconds)
19
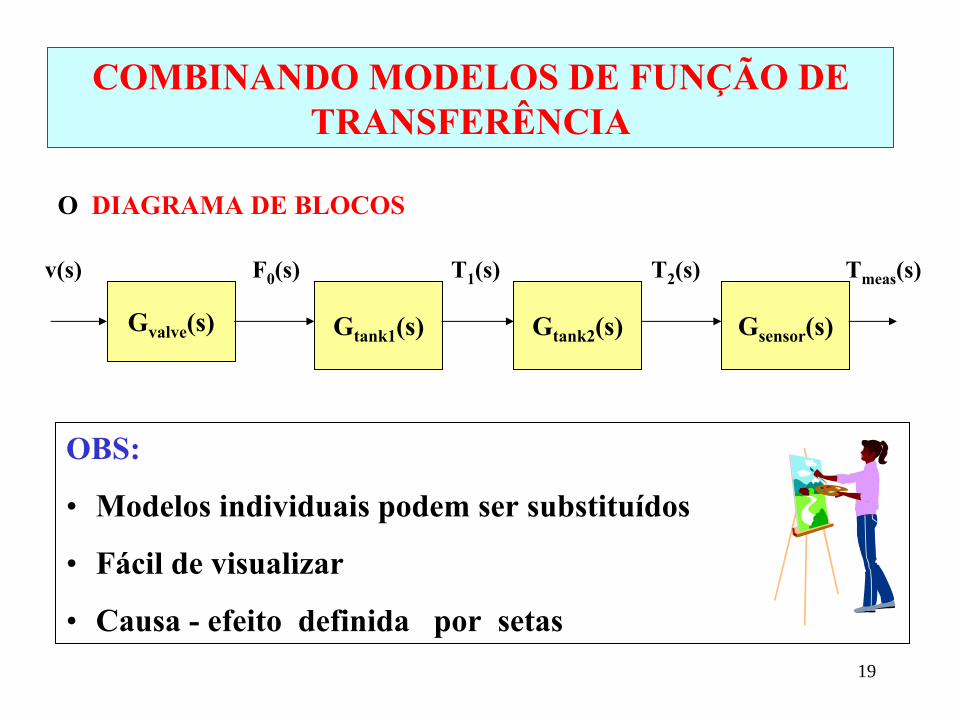
COMBINANDO MODELOS DE FUNÇÃO DE TRANSFERÊNCIA
O DIAGRAMA DE BLOCOS
Gvalve
(s) Gtank2
(s)Gtank1
(s) Gsensor
(s)
v(s) F0
(s) T1
(s) T2
(s) Tmeas
(s)
OBS:
• Modelos individuais podem ser substituídos
• Fácil de visualizar
• Causa -
efeito definida por setas

20
FUNÇÃO DE TRANSFERÊNCIA DO CONJUNTO
Gvalve
(s) Gtank2
(s)Gtank1
(s) Gsensor
(s)
v(s) F0
(s) T1
(s) T2
(s) Tmeas
(s)
)()()()( )()(
)()(
)()(
)()()(
)()(
sGsGsGsGsvsF
sFsT
sTsT
sTsTsG
svsT
vTTs
measmeas
12
0
0
1
1
2
2
=
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡==
G(s)v(s) Tmeas
(s)
21
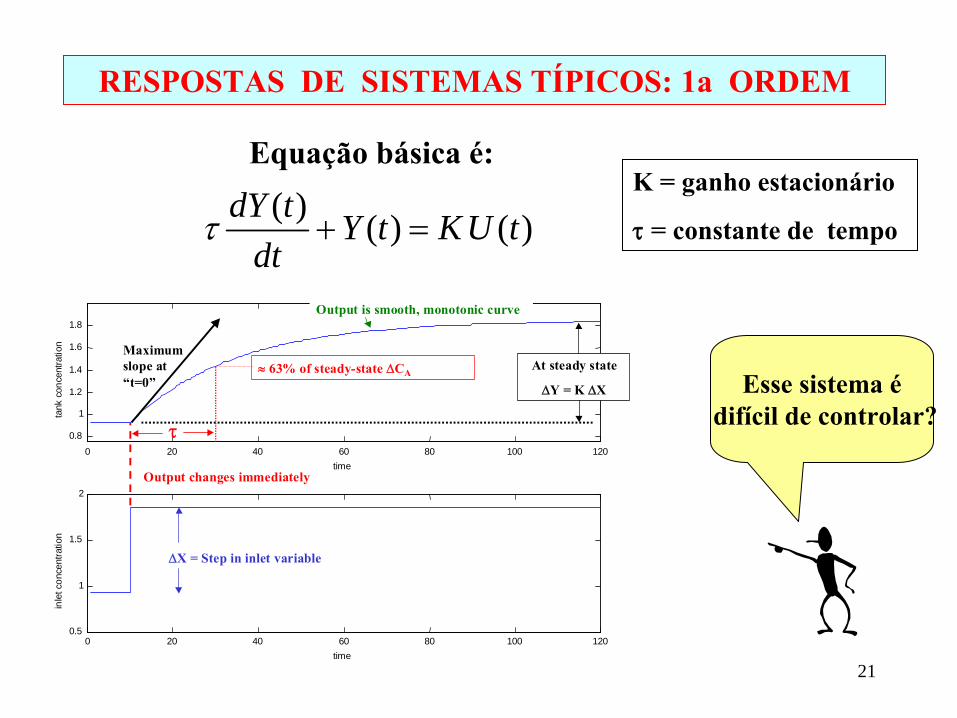
RESPOSTAS DE SISTEMAS TÍPICOS:
1a ORDEM
Equação básica é:
( ) ( ) ( )dY t Y t KU tdt
τ + =
0 20 40 60 80 100 120
0.8
1
1.2
1.4
1.6
1.8
time
tank
con
cent
ratio
n
0 20 40 60 80 100 1200.5
1
1.5
2
time
inle
t con
cent
ratio
n
Maximumslope at“t=0”
Output changes immediately
Output is smooth, monotonic curve
At steady state
ΔY = K ΔX
τ
≈ 63% of steady-state ΔCA
ΔX = Step in inlet variable
Esse sistema édifícil de controlar?
K = ganho estacionário
τ
= constante de tempo
22
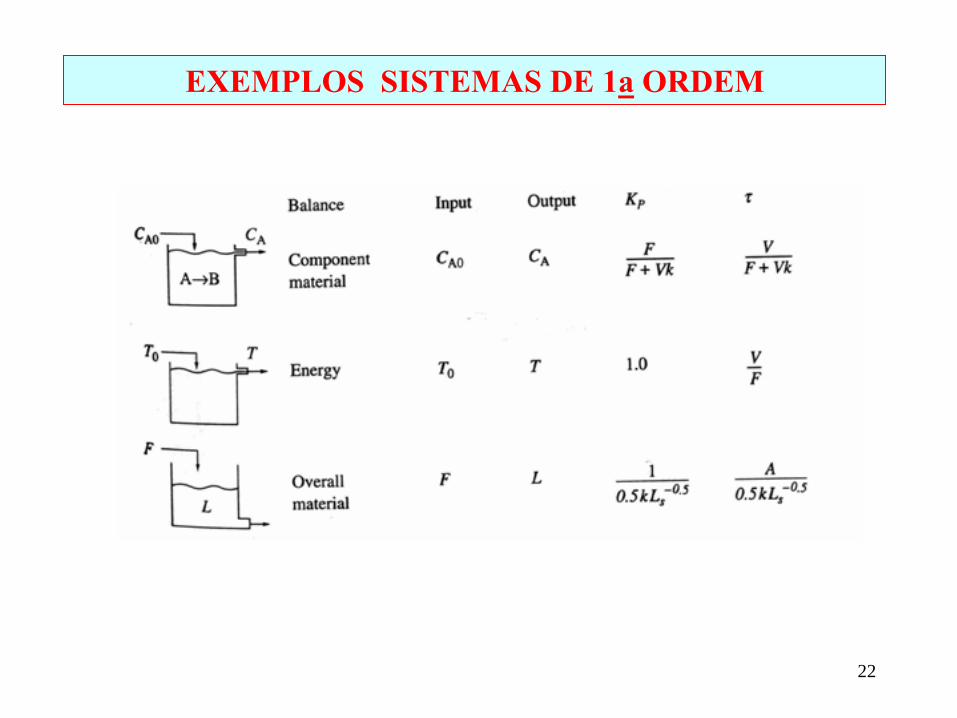
EXEMPLOS SISTEMAS DE 1a
ORDEM
23
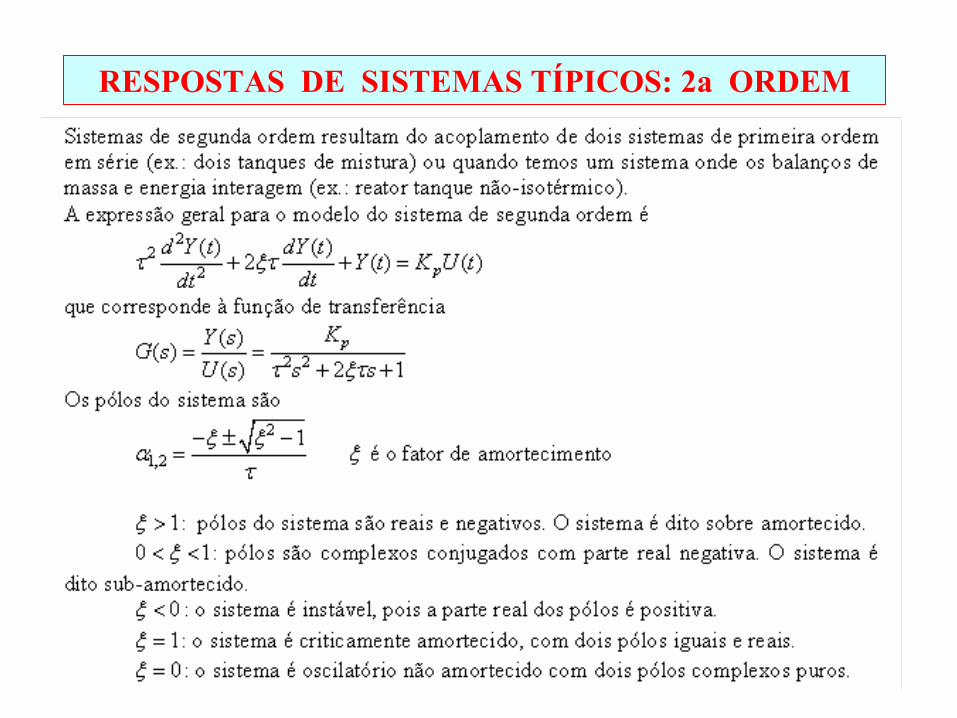
RESPOSTAS DE SISTEMAS TÍPICOS:
2a ORDEM
24
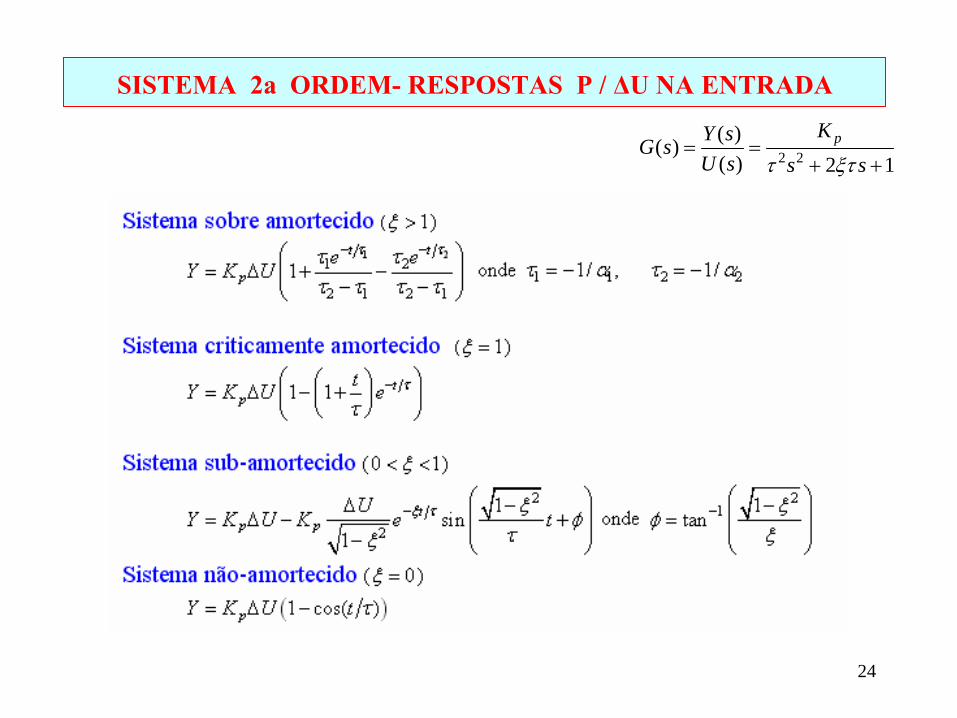
SISTEMA 2a ORDEM-
RESPOSTAS P / ΔU
NA ENTRADA
2 2( )( )( ) 2 1
pKY sG sU s s sτ ξτ
= =+ +

25
SISTEMA 2a ORDEM-
RESPOSTAS P / ΔU
NA ENTRADA
1 ______1
0 1
ξξ
ξ
> →= → − − − − −< < → ⋅ − ⋅ − ⋅ −

26
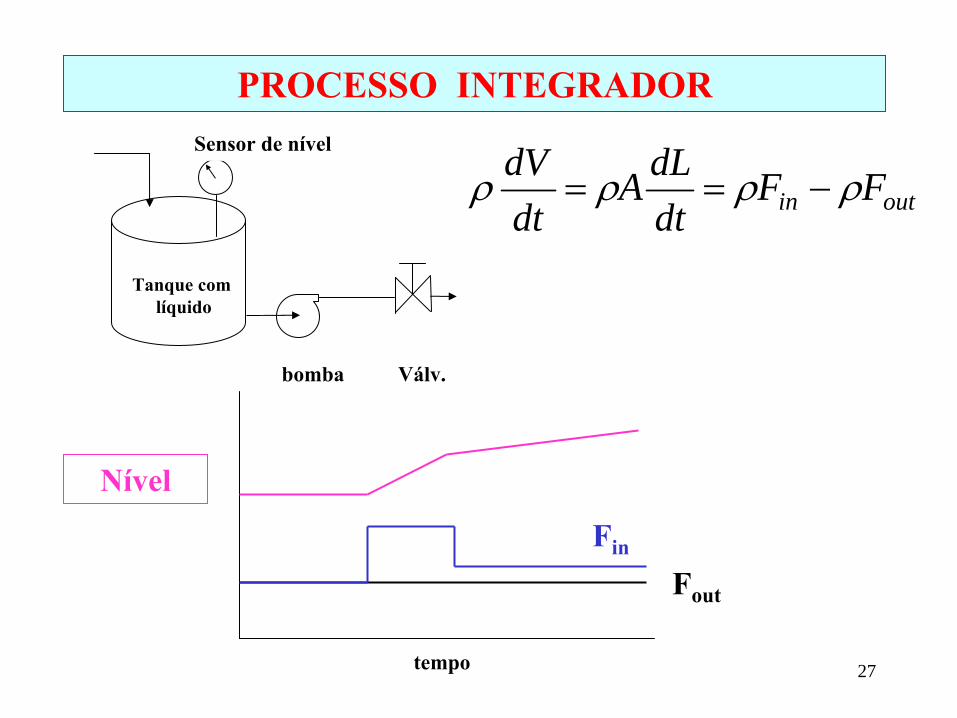
PROCESSO INTEGRADOR
bomba Válv.
Level sensorSensor nível
Tanque com líquido
São sistemas onde os fluxos de entrada e de saída não dependem do inventário.
O sistema integra a diferença entre os fluxos.
outin F F dtdLA
dtdV ρρρρ −==
)()()()(LftF
LftF
out
in
≠
≠
27
PROCESSO INTEGRADOR
bomba Válv.
Level sensorSensor de nível
Tanque comlíquido
outin FFdtdLA
dtdV ρρρρ −==
Fout
Fin
tempo
Nível
28
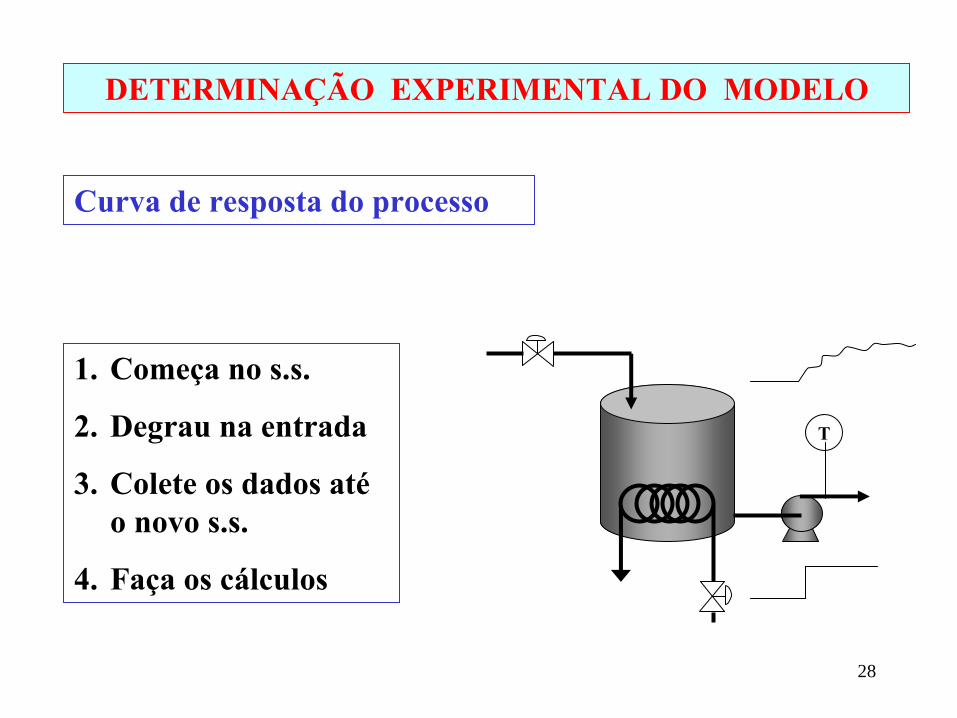
DETERMINAÇÃO EXPERIMENTAL DO MODELO
Curva de resposta do processo
1.
Começa no s.s.
2.
Degrau na entrada
3.
Colete os dados até o novo s.s.
4.
Faça os cálculos
T
29
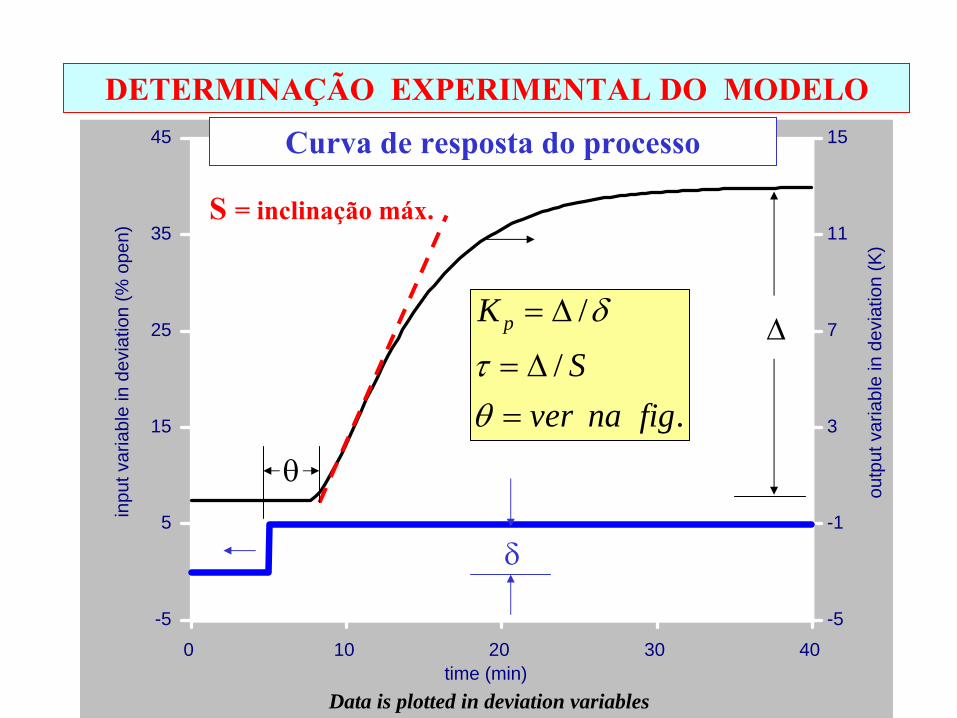
DETERMINAÇÃO EXPERIMENTAL DO MODELO
-5
5
15
25
35
45 in
put v
aria
ble
in d
evia
tion
(% o
pen)
-5
-1
3
7
11
15
outp
ut v
aria
ble
in d
evia
tion
(K)
0 10 20 30 40 time (min)
Curva de resposta do processo
δ
Δ
S = inclinação
máx.
θ
/
/.
pK
Sver na fig
= Δ
= Δ=
δ
τθ
Data is plotted in deviation variables


















