
uAULA21_Z
25
Sinais e Sistemas Aula 16 Professor: Rafael Antunes Nóbrega 1
-
Upload
thiago-scher -
Category
Documents
-
view
212 -
download
0
description
Aula de SS
Transcript of uAULA21_Z
Sinais e SistemasAula 16
Professor: Rafael Antunes Nóbrega
1
Continuação...• CAPÍTULO 1: Introdução:
– Sinais de tempo contínuo e de tempo discreto;– Energia e Potência de um sinal– Transformações de variáveis independentes;– Sinais periódicos– Sinais senoidais e exponenciais;– Funções impulso unitário e degrau unitário;– Sistemas de tempo contínuo e de tempo discreto;– Propriedades básicas de sistemas;
• CAPÍTULO 2: Sistemas lineares invariantes no tempo:– Representações de sinais em termos de impulso;– Convolução.– Esquema de Interconexões– Propriedades de sistemas LIT– Equações diferenciais lineares com coeficientes constantes– Funções de singularidade
• CAPÍTULO 3: Série de Fourier– Perspectiva histórica– Resposta dos sistemas LIT às exponenciais complexas– Representação de sinais periódicos de tempo contínuo– Convergência da série de Fourier– Propriedades da série de Fourier de tempo contínuo– Representação de sinais periódicos de tempo discreto– Propriedades da série de Fourier de tempo discreto– Série de Fourier e sistemas LIT– Filtragem– Exemplos filtros contínuos– Exemplos filtros discretos
• CAPÍTULO 4: A transformada de Fourier de tempo contínuo– Representações de sinais aperiódicos (tempo contínuo)– TF para sinais periódicos– Propriedades da TF de tempo contínuo– A propriedade da convolução– A propriedade da multiplicação– Sistemas caracterizados por equações diferenciais lineares com coeficientes constantes
• CAPÍTULO 5: A transformada de Fourier de tempo discreto– Representações de sinais aperiódicos (tempo discreto)– TF para sinais periódicos– Propriedades da TF de tempo discreto– A propriedade da convolução– A propriedade da multiplicação– Dualidade– Sistemas caracterizados por eq. Diferenças lineares com coef.s constantes
• CAPÍTULO 9: A transformada de Laplace
• CAPÍTULO 10: A transformada Z
2
visto
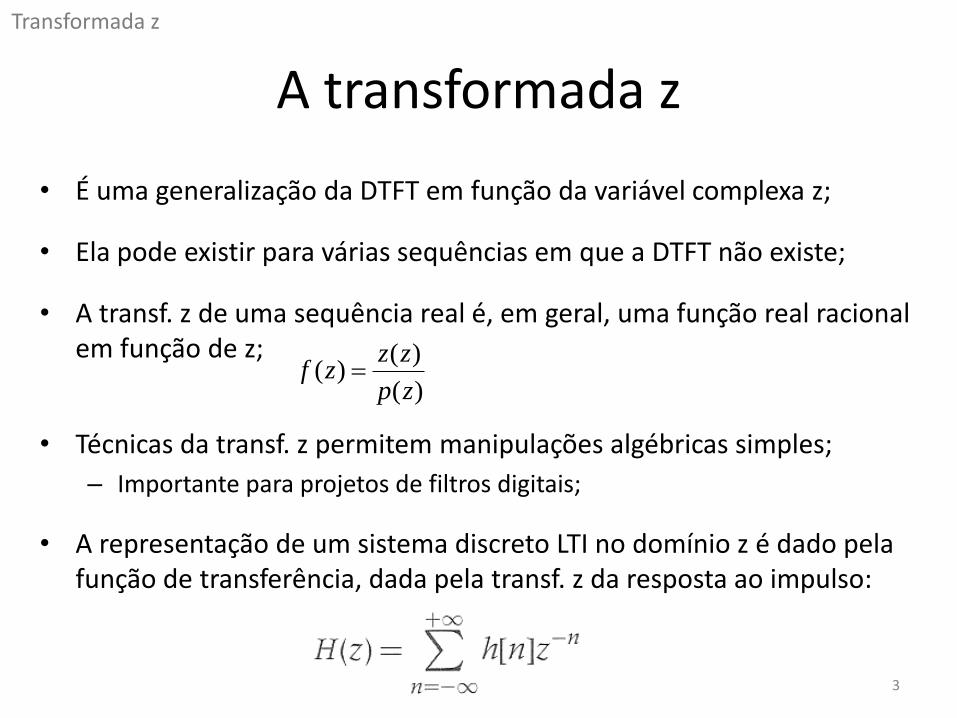
• É uma generalização da DTFT em função da variável complexa z;
• Ela pode existir para várias sequências em que a DTFT não existe;
• A transf. z de uma sequência real é, em geral, uma função real racional em função de z;
• Técnicas da transf. z permitem manipulações algébricas simples;
– Importante para projetos de filtros digitais;
• A representação de um sistema discreto LTI no domínio z é dado pela função de transferência, dada pela transf. z da resposta ao impulso:
3
A transformada z
)(
)()(
zp
zzzf
Transformada z
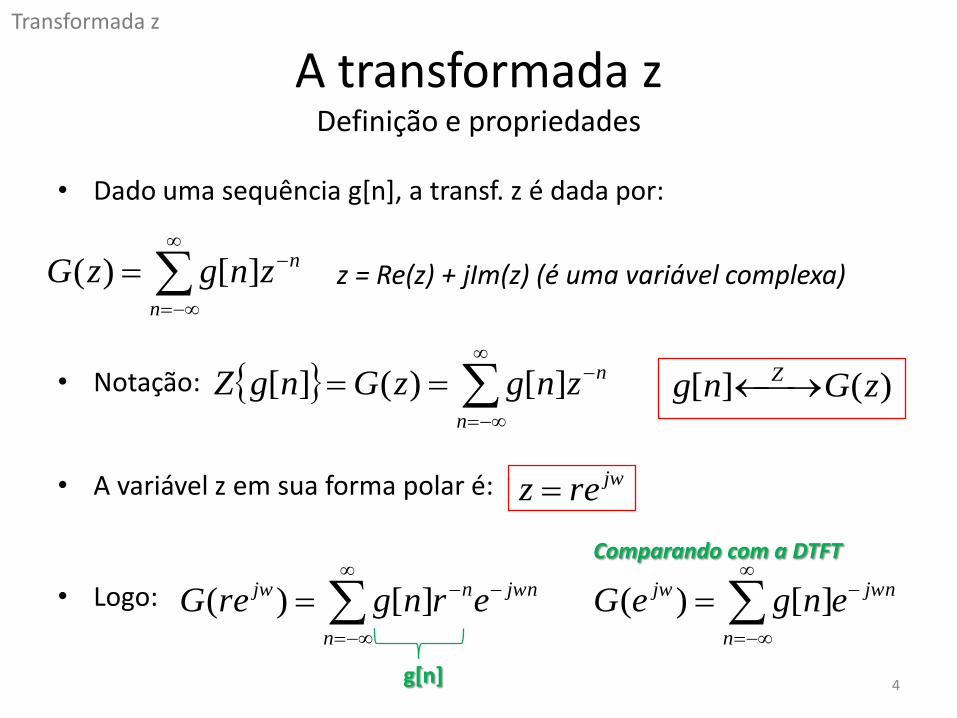
• Dado uma sequência g[n], a transf. z é dada por:
z = Re(z) + jIm(z) (é uma variável complexa)
• Notação:
• A variável z em sua forma polar é:
• Logo:
4
A transformada zDefinição e propriedades
n
nzngzG ][)(
n
nzngzGngZ ][)(][ )(][ zGng Z
jwrez
n
jwnnjw erngreG ][)(
n
jwnjw engeG ][)(
Comparando com a DTFT
g[n]
Transformada z

• Logo, podemos interpretar a TZ como a DTFT da sequência g[n]r-n;
• Interpretação geométrica:
– |z| = 1 circulo unitário
• Para r = 1, G(z) se reduz a G(ejw) DTFT
– z = 1 G(z) = G(ej0)
• Valor de G(ejw) em w = 0;
– z = j G(z) = G(ejπ/2)
• Se avaliarmos G(z) no círculo unitário para todos os valores de w, começando em z = 1 e terminando de novo em z = 1, teremos determinado G(ejw) no intervalo 0 ≤ w < 2π;
5
A transformada zDefinição e propriedades
jwrez
Transformada z
• Logo, percorrendo o círculo unitário, podemos avaliar G(ejw) em todos os valores de freq. -∞ ≤ w < ∞, dado a periodicidade da DTFT;
• Assim como a DTFT, existem condições de convergência da série infinita que é a transf. z;
• Para uma dada sequência, o grupo R de valores de z para que a transf. z converge é chamado de Região de Convergência (RDC);
• Vimos na DTFT que g[n]r-n deve ser absolutamente somável;
• A diferença com a DTFT é que se g[n] não for absolutamente somável, g[n]r-n pode o ser dependendo do valor de r;
6
A transformada zDefinição e propriedades
n
nrng ][
Transformada z
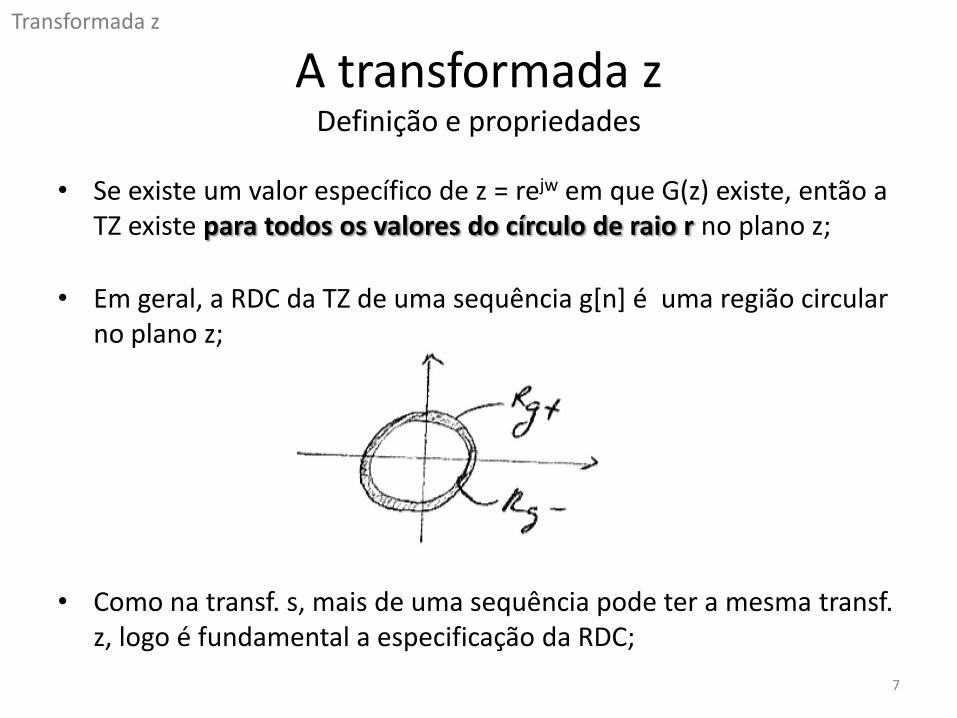
• Se existe um valor específico de z = rejw em que G(z) existe, então a TZ existe para todos os valores do círculo de raio r no plano z;
• Em geral, a RDC da TZ de uma sequência g[n] é uma região circular no plano z;
• Como na transf. s, mais de uma sequência pode ter a mesma transf. z, logo é fundamental a especificação da RDC;
7
A transformada zDefinição e propriedades
Transformada z
• Exemplo 1:
– Ache a TZ de x[n] = anu[n]
8
A transformada zDefinição e propriedades
Transformada z
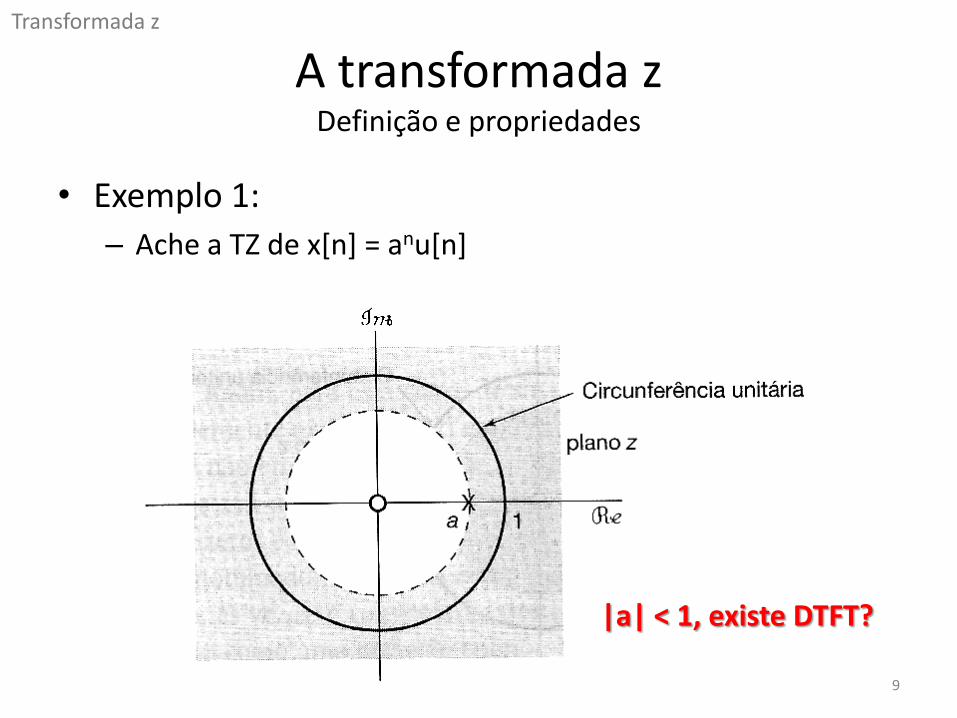
• Exemplo 1:
– Ache a TZ de x[n] = anu[n]
9
|a| < 1, existe DTFT?
A transformada zDefinição e propriedades
Transformada z
• Exemplo 2:
– Ache a TZ de x[n] = -anu[-n-1]
10
A transformada zDefinição e propriedades
Transformada z
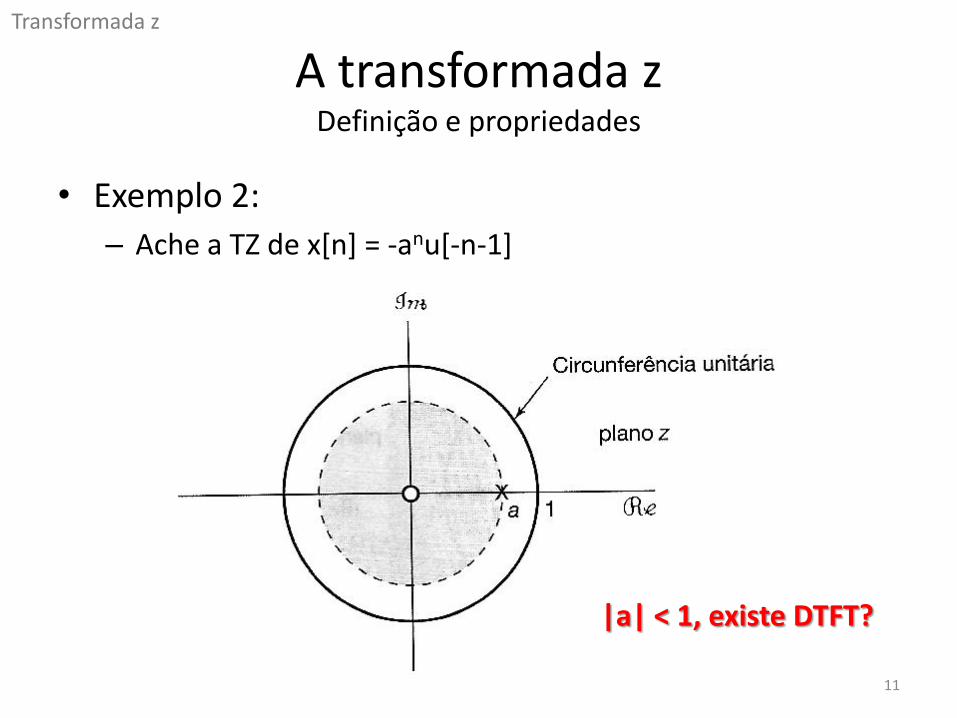
• Exemplo 2:
– Ache a TZ de x[n] = -anu[-n-1]
11
A transformada zDefinição e propriedades
|a| < 1, existe DTFT?
Transformada z
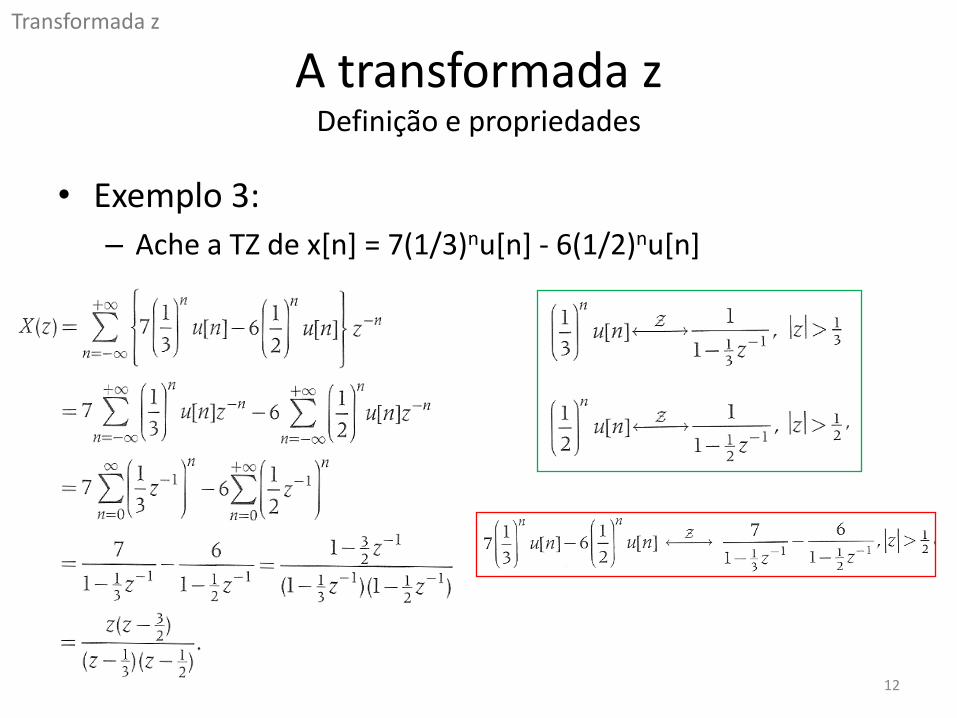
• Exemplo 3:
– Ache a TZ de x[n] = 7(1/3)nu[n] - 6(1/2)nu[n]
12
A transformada zDefinição e propriedades
Transformada z
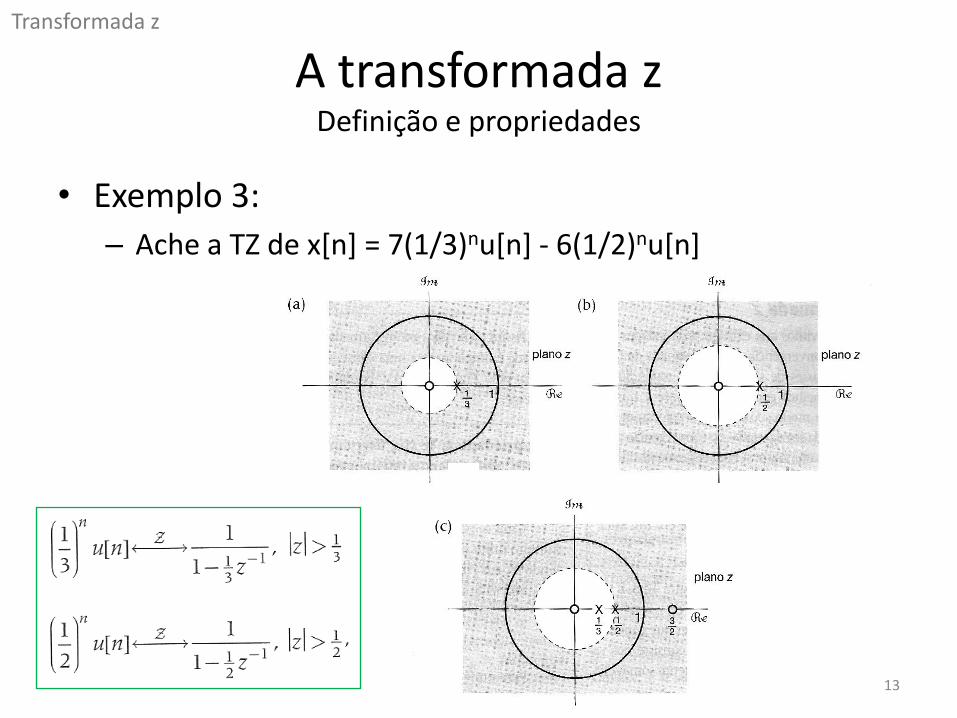
• Exemplo 3:
– Ache a TZ de x[n] = 7(1/3)nu[n] - 6(1/2)nu[n]
13
A transformada zDefinição e propriedades
Transformada z
14
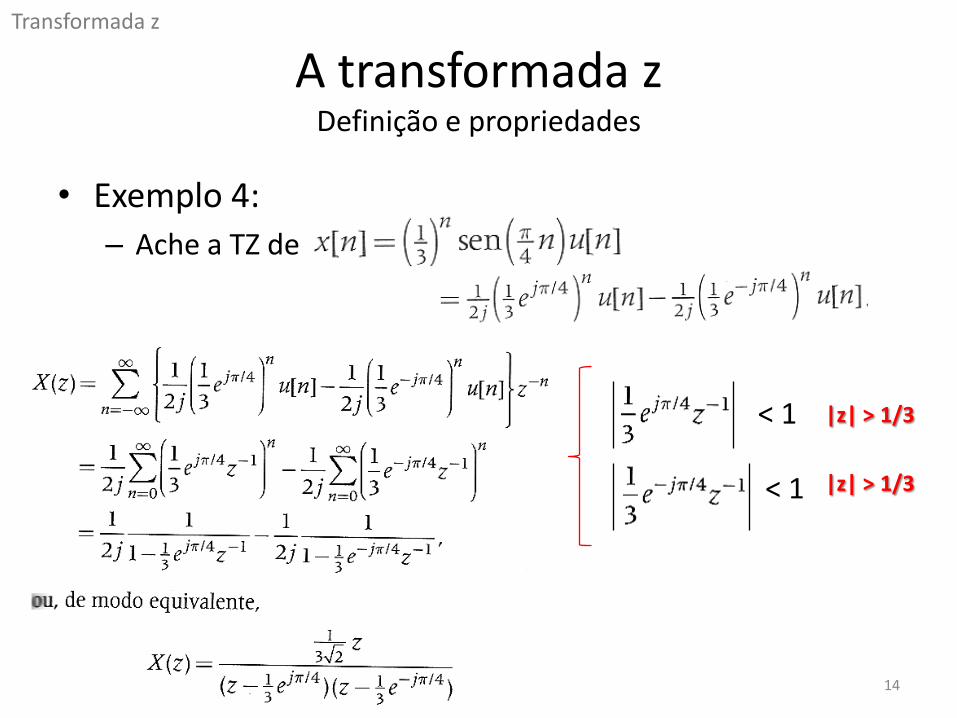
• Exemplo 4:
– Ache a TZ de
A transformada zDefinição e propriedades
< 1
< 1
|z| > 1/3
|z| > 1/3
Transformada z
15
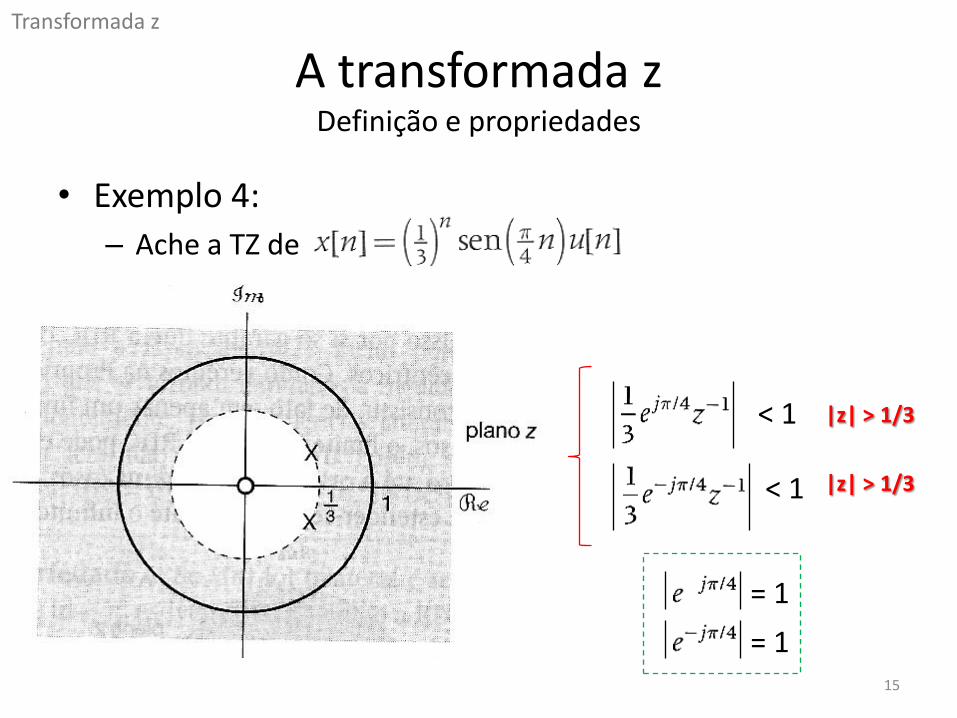
• Exemplo 4:
– Ache a TZ de
A transformada zDefinição e propriedades
< 1
< 1
|z| > 1/3
|z| > 1/3
= 1
= 1
Transformada z
• Nos exemplos anteriores podemos notar que para sequências que são nulas para n < 0, X(z) envolve apenas potências negativas de z.
• Assim, para esta classe de sinais, é conveniente expressar X(z) em termos de polinômios em z-1 e não em z;
• Igualmente a transf. de Laplace, podemos adicionar pólos no infinito quando grau[N(z)]>grau[D(z)] ou zeros no infinito caso contrário
16
A transformada zDefinição e propriedades
Transformada z
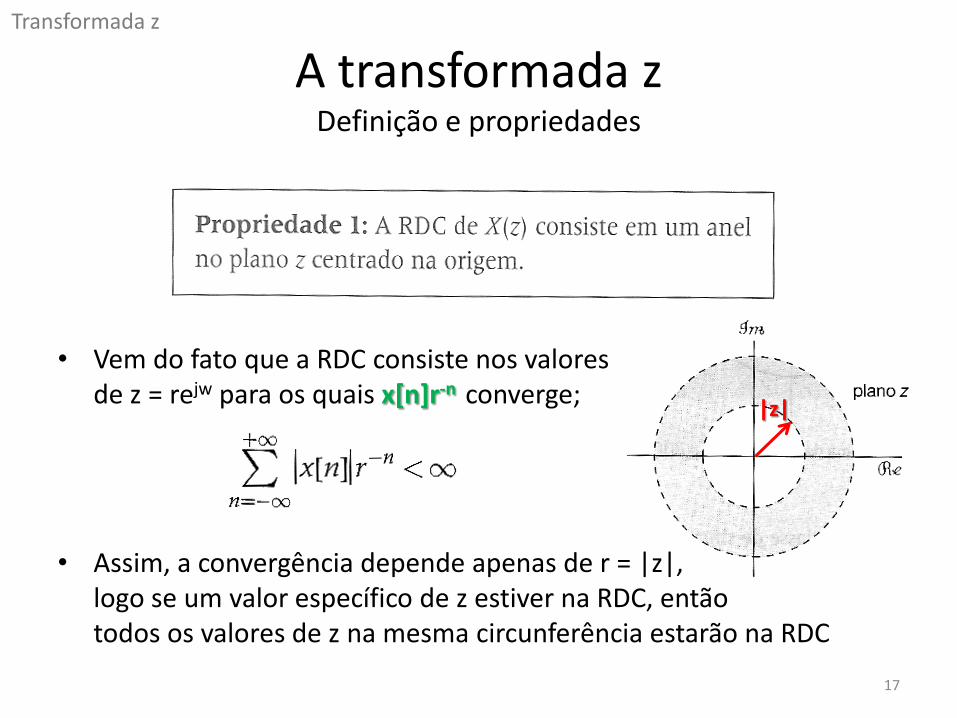
• Vem do fato que a RDC consiste nos valores de z = rejw para os quais x[n]r-n converge;
• Assim, a convergência depende apenas de r = |z|, logo se um valor específico de z estiver na RDC, então todos os valores de z na mesma circunferência estarão na RDC
17
A transformada zDefinição e propriedades
|z|
Transformada z
• Por definição, no pólo, X(z) ∞;
18
A transformada zDefinição e propriedades
Transformada z
19
A transformada zDefinição e propriedades
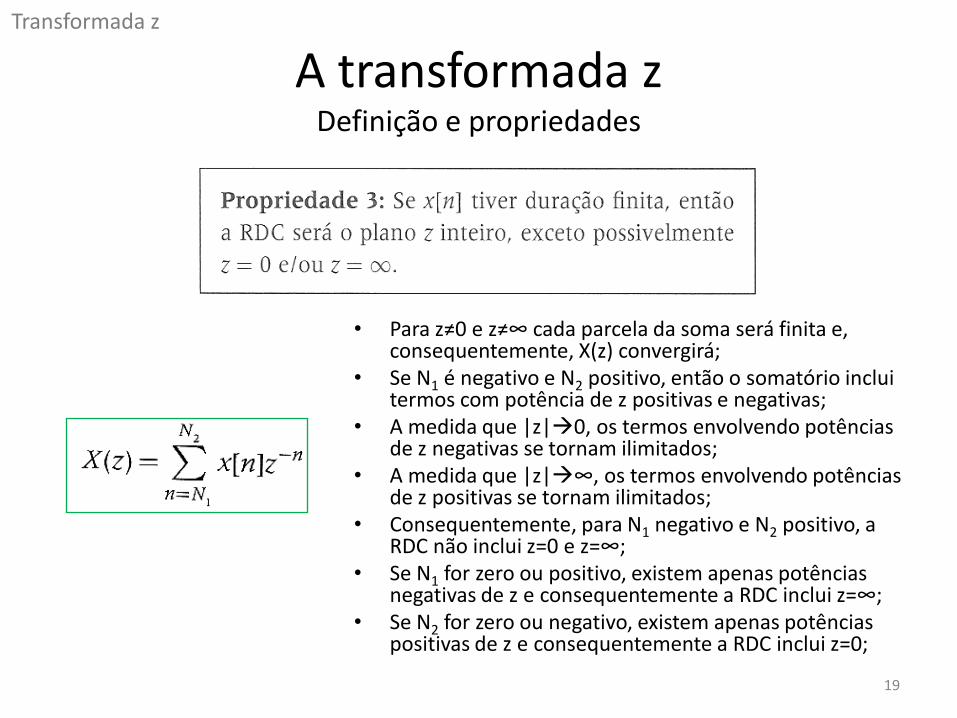
• Para z≠0 e z≠∞ cada parcela da soma será finita e, consequentemente, X(z) convergirá;
• Se N1 é negativo e N2 positivo, então o somatório inclui termos com potência de z positivas e negativas;
• A medida que |z|0, os termos envolvendo potências de z negativas se tornam ilimitados;
• A medida que |z|∞, os termos envolvendo potências de z positivas se tornam ilimitados;
• Consequentemente, para N1 negativo e N2 positivo, a RDC não inclui z=0 e z=∞;
• Se N1 for zero ou positivo, existem apenas potências negativas de z e consequentemente a RDC inclui z=∞;
• Se N2 for zero ou negativo, existem apenas potências positivas de z e consequentemente a RDC inclui z=0;
Transformada z
20
A transformada zDefinição e propriedades
Transformada z
21
A transformada zDefinição e propriedades
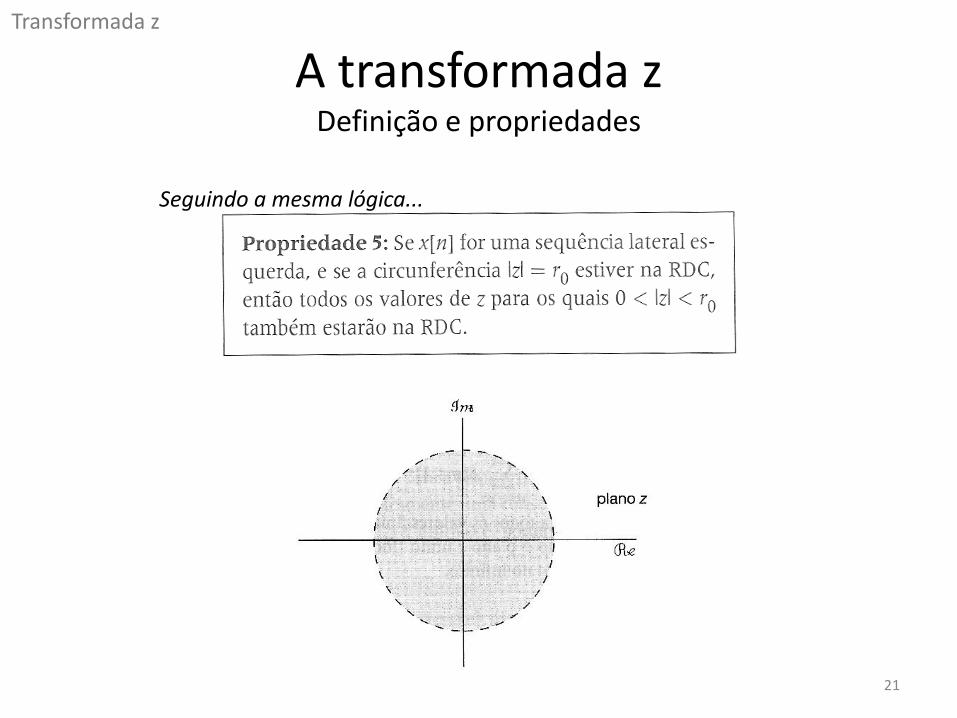
Seguindo a mesma lógica...
Transformada z

• Segue então que:
22
A transformada zDefinição e propriedades
Transformada z
23
A transformada zDefinição e propriedades
Transformada z
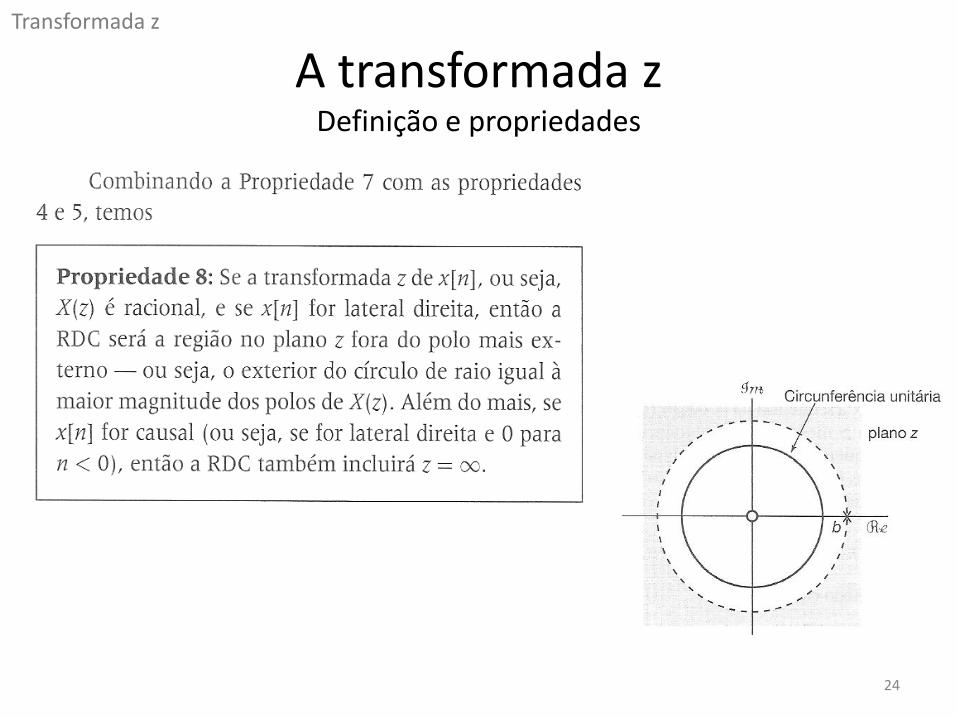
24
A transformada zDefinição e propriedades
Transformada z
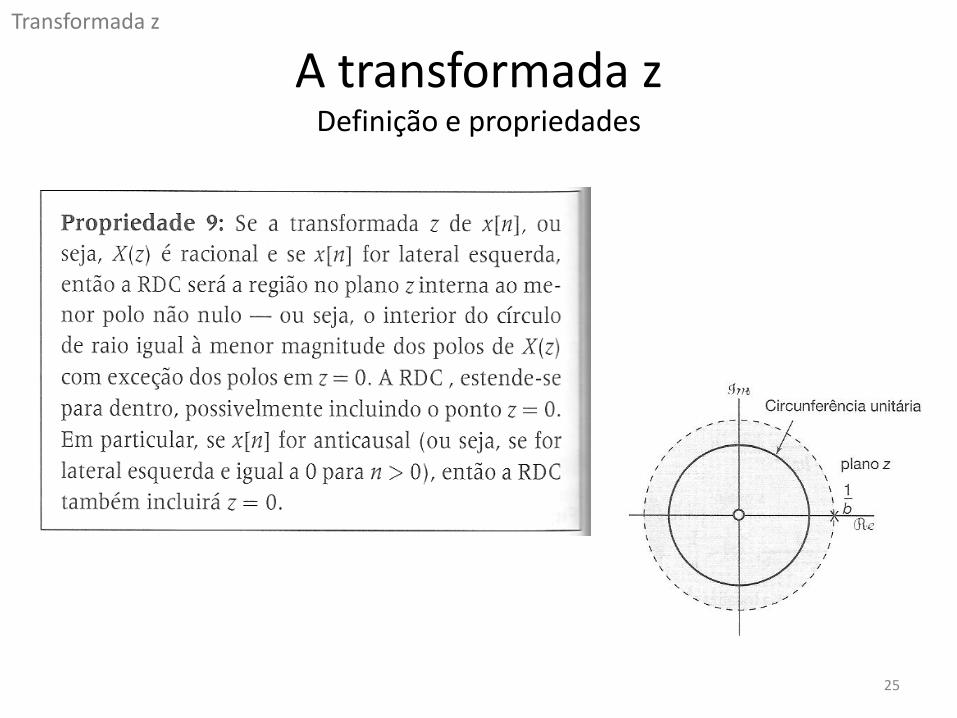
25
A transformada zDefinição e propriedades
Transformada z


















