Uma Metodologia Para o Projeto da Topologia Ótima de Estuturas Usando Programação Inteira Mista

of 10
-
Upload
gustavo5150 -
Category
Documents
-
view
214 -
download
0
Transcript of Uma Metodologia Para o Projeto da Topologia Ótima de Estuturas Usando Programação Inteira Mista
-
7/22/2019 Uma Metodologia Para o Projeto da Topologia tima de Estuturas Usando Programao Inteira Mista
1/10
UMA METODOLOGIA PARA O PROJETO DA TOPOLOGIA TIMA DEESTRUTURAS USANDO PROGRAMAO INTEIRA MISTA
Thiago Alves de queiroz, [email protected] Anderson Guimares, [email protected] Universidade Federal de Gois, Departamento de Matemtica - DM/CAC, 75704-020, Catalo-GO, Brasil
Resumo: Otimizao de topologia uma ferramenta de projeto mecnico que procura pela melhor distribuio dematerial de uma estrutura. Tradicionalmente, grande parte dos mtodos usados pela literatura para computar a topologiatima so baseados no mtodo do critrio de otimalidade. Neste trabalho, propomos uma metodologia para obter atopologia tima global usando o mtodo do critrio de otimalidade combinado com programao inteira mista. Umatcnica de ltragem baseada na mdia da sensibilidade da energia de deformao foi tambm utilizada para evitar a presena de mnimos locais dependente da malha. A metodologia proposta foi usada para obter a topologia tima deestruturas com mxima rigidez, embora seja facilmente adaptvel para outras situaes. Atravs de testes preliminaresconseguimos solues gastando at 10% menos tempo de processamento comparado ao simples uso de um algoritmobranch-and-bound para resolver o programa inteiro misto. Palavras-chave: otimizao de topologia, mtodo do critrio de otimalidade, programao inteira mista, otimizaoglobal.
1. INTRODUO
A otimizao da topologia de estruturas contnuas um tema de importncia no campo do projeto estrutural timo.Na prtica, a estrutura contnua discretizada em um grande nmero de elementos nitos com o objetivo de encontraruma distribuio de material tima segundo critrios iniciais especicados (Sigmund, 2001). A topologia tima resultantepode conter furos ou regies vazias, indicando falta de material nos respectivos elementos nitos, porm requeridomanter a conectividade entre os elementos restantes. Muitas aplicaes envolvem a otimizao de topologias, em especialas da indstria de autos.
Problemas de otimizao de topologia geralmente possuem modelos no-lineares (no-convexos) e a discretizao daestrutura aproxima o problema e a soluo geral. A funo objetivo tipicamente inclui o peso ou a rigidez da estrutura e asrestries lidam com deformaes, tenses ou limitaes na quantidade de material disponvel. Em linhas gerais, otimizara topologia de uma estrutura contnua consiste em determinar a quantidade, o tamanho e a forma dos buracos na dadaestrutura bi- ou tridimensional, que possui condies de contorno, material e um conjunto de foras externas especcas
Stolpe (2007).Existem diversas estratgias para resolver problemas de otimizao de topologia sendo a estrutura discretizada, in-cluindo heursticas, como os mtodos de penalizao, em que as variveis de deciso relativas a presena ou no dematerial em cada elemento nito, assumindo valores no inteiros, so penalizadas. Neste caso, o problema formuladocomo um programa no-linear (no-convexo) podendo ser resolvido, por exemplo, pelo Mtodo das Assntotas Mveis(Svanberg, 1987) ou o Mtodo do Critrio de Otimalidade (Bendsoe, 1995).
importante ressaltar que a no-convexidade presente pode resultar em uma topologia desconectada ou conter partesdegeneradas, onde se localizam a soluo tima global, levando otimizao a solues timas locais. (Kirsch, 1990),(Rozvany, 2001). Apesar de mtodos de perturbao terem sido propostos para solucionar o problema das partes degener-adas (Petersson, 2001), Stolpe and Svanberg (2001) demonstrou que os problemas perturbados ainda eram no-convexos.Tambm, outros mtodos e heursticas foram propostas para os problemas de otimizao de topologia, incluindo algorit-mos genticos e recozimento simulado. Mais detalhes sobre estes mtodos podem ser obtidos em Ghaddaret al. (1995),Chapman and Jakiela (1996) e Beckers (1999). Uma viso geral sobre aplicaes, e tambm mtodos, em otimizao detopologia podem obtidos em Eschenauer and Olhoff (2001) e Bendsoe and Sigmund (2003).
Diante dos problemas com as formulao no-convexas, alguns autores, como Stolpe and Svanberg (2003) e Stolpe(2007), apresentaram metodologias para reformular problemas de otimizao de topologia no-convexos em formulaesinteiras mistas convexas. Com isso, o emprego dos vrios mtodos j propostos na literatura para resolver tais tipos de
-
7/22/2019 Uma Metodologia Para o Projeto da Topologia tima de Estuturas Usando Programao Inteira Mista
2/10
V I I C o n g r e s s o N a c i o n a l d e E n g e n h a r i a M e c n i c a , 3 1 d e j u l h o a 0 3 d e A g o s t o 2 0 1 2 , S o L u s -
M a r a n h o
formulaes inteiras poderiam ser utilizados em problemas de otimizao de topologia. Alm disso, os problemas com aspartes degeneradas, os mnimos locais, poderiam ser evitados.
Apesar das vantagens com as formulao inteiras mistas convexas, alguns problemas surgiram, especialmente o fatodos modelos resultantes serem enormes. Isto , continham um nmero muito grande de variveis e restries, de formaque apenas estruturas com uma malha contendo poucos elementos nitos fossem otimizadas gastando um tempo razovelde processamento (Stolpe, 2007).
Diante dos problemas encontrados tanto com as formulaes no-convexas como com as inteiras mistas convexas,propomos neste trabalho uma metodologia que tira proveito de ambas. Combinamos mtodos que resolvem cada formu-lao em prol de resolver globalmente otimalidade estruturas de mdio e grande porte dentro de um tempo razovel deprocessamento. Em linhas gerais, descrevemos um mtodo baseado no critrio de otimalidade, que faz uso de tcnicas deltragem, para gerar uma soluo inicial do problema. Como esta heurstica rpida e, geralmente, retorna boas solues,usamos tal soluo para alimentar um algoritmo, debranch-and-bound , que resolve a formulao inteira mista convexa.Com isso, diminuir o tempo de processamento requerido por este ltimo algoritmo para encontrar a soluo tima global.
Este artigo est organizado da seguinte maneira. A Seo 2.apresenta algumas consideraes iniciais sobre o problemade otimizao de topologia tratado neste trabalho. Por sua vez, a Seo 3.discute o mtodo do critrio de otimalidadeempregado para obter a soluo inicial do problema em questo, enquanto que na Seo 4.reformulamos o problema no-convexo em um convexo usando programao inteira mista. A Seo 2 apresenta a metodologia proposta e faz algumasdiscusses sobre o assunto. Por m, algumas concluses e consideraes para trabalhos futuros so apresentadas na Seo
6..2. CONSIDERAES PARA A OTIMIZAO DE TOPOLOGIA
A formulao no-linear na eq. (1) visa maximizar a rigidez (minimum compliance problem ) da estrutura, a qual estsujeita a apoios e uma dada fora externa (Sigmund, 2001). O objetivo, ento, distribuir material (isotrpico) para umadada estrutura bidimensional discretizada por elementos nitos. Geralmente, a energia de deformao utilizada comofuno objetivo e restries envolvendo as equaes de equilbrio e a quantidade de material so usadas.
minimizar C = U T KU
sujeito a :( i ) KU = F
( ii ) V ( x )V = f v
( iii ) 0 x l x 1
(1)
Na eq. (1),C representa a energia de deformao;U e F so os vetores globais de deslocamento e fora, respec-tivamente;K a matriz de rigidez global, do elementos nitos;V (x) representa a quantidade de material na topologiatima;V a quantidade total de material que pode ser alocada na estrutura discretizada;f v limita a quantidade de ma-terial presente na topologia tima;x representa as variveis de deciso para os elementos nitos da estrutura, indicandoa densidade relativa de cada elemento nito; e,x l corresponde ao valor mnimo que pode ser assumido pela densidaderelativa, de modo a evitar singularidades. O sobre-escritoT representa a transposta do respectivo vetor/matriz.
Restries laterais envolvendo limites para os deslocamentos em U tambm podem ser inseridas na formulao (1)com o objetivo de satisfazer critrios de segurana, como evitar danos estruturais. Ento:
U min U U max . (2)
Para uma dada estrutura bidimensional discretizada emn elementos (assumiremos em todo o artigo elementos nitosdo tipo retangular de 4-ns) comd graus de liberdade, as dimenses dos vetores/matrizes da formulao 1 so:K R d d ,U, U min , U max R d , F R d e x R n .
Obviamente estamos interessado em uma atribuio 0-1 (binria) para as variveis de deciso, de modo que o valor1 indica a presena de material no determinado elemento nito e 0, caso contrrio. Alm disso, desejamos que natopologia tima os elementos nitos com material formem uma estrutura conexa. Para satisfazer estes requisitos, o usoda abordagem SIMP (Solid Isotropic Material with Penalization ), tambm conhecida como abordagem da lei de potncia( power-law approach ), tem sido empregada por alguns autores como Zhou and Rozvany (1991), Mlejnek (1992), Mauteet al. (1998) e Sigmund (2001).
Em linhas gerais, a abordagem SIMP representa as propriedades do material como sendo a densidade relativa doselementos nitos a uma potncia de penalidade multiplicada pelas propriedades do material slido. Isto tem como nal-idade penalizar os elementos nitos com valores de densidade relativa entre 0 e 1. O objetivo garantir que apenas umtipo de material seja usado na construo da topologia tima. De acordo com Bendsoe and Sigmund (1999), a SIMP sicamente vivel desde que a potncia de penalidade seja maior ou igual a 3 para uma razo dePoisson igual a13 . Alm
-
7/22/2019 Uma Metodologia Para o Projeto da Topologia tima de Estuturas Usando Programao Inteira Mista
3/10
V I I C o n g r e s s o N a c i o n a l d e E n g e n h a r i a M e c n i c a , 3 1 d e j u l h o a 0 3 d e A g o s t o 2 0 1 2 , S o L u s -
M a r a n h o
disso, para assegurar a existncia de uma soluo cuja estrutura seja conexa, a abordagem SIMP deve ser combinada, porexemplo, com uma tcnica de ltragem ou restries de permetro (veja Sigmund and Petersson (1998)).
Aplicando a abordagem SIMP para a otimizao da topologia, a funo objetivo na formulao (1) pode ser escritacomo:
n
e=1(x e ) pu pe ke u e , (3)
sendox e , u e e ke a varivel de deciso (densidade relativa), o vetor de deslocamento e a matriz de rigidez para o dadoelemento nitoe, respectivamente; e,p a potncia de penalidade.
Para resolver um problema de otimizao de topologia, como o descrita na eq. (1) com a funo objetivo (3), existemdiversas abordagens, incluindo mtodos do tipo critrio de otimalidade, programao inteira sequencial e programaointeira mista 0-1.
3. O MTODO DO CRITRIO DE OTIMALIDADE
Descreveremos uma abordagem iterativa baseada no mtodo do critrio de otimalidade (Bendsoe, 1995). Esta abor-dagem ser utilizada posteriormente como sub-rotina no algoritmo de programao inteira mista. Uma das vantagens domtodo do critrio de otimalidade lidar com problemas envolvendo uma grande quantidade de variveis de deciso, ouseja, uma estrutura com malha bastante renada.
Inicialmente, no mtodo do critrio de otimalidade, computamos o Lagrangeano na funo objetivo e restries daformulao (1), resultando em:
C + (V (x) f v V ) + T 1 (KU F ) +n
e =1
e2(x l x e ) +n
e =1
e3(x e 1), (4)
sendo e T 1 os multiplicadores de Lagrange globais; e, e2 e e3 os multiplicadores de Lagrange para o elemento nitoe.O multiplicador T 1 consiste em um vetor que multiplica a equao de equilbrio.
Aplicando as condies deKarush-Kuhn-Tucker juntamente com a lei da potncia para a obteno da soluo tima,
veja Vanderplaats (1999) e Sigmund (2001) para detalhes, na eq. (4), chegamos em:
e =p(x e ) p 1uT e ke u e
V (x e )x e= 1 , (5)
representando que a densidade da energia de deformao(uT e ke u e ) para qualquer elemento permanecer constante noprocesso de otimizao. A partir disso, a densidade relativa do material na iterao seguinte,i + 1 , dada por:
x i +1e = xie (
ie )
, (6)
sendo, geralmente igual a12 , o coeciente de amortecimento numrico. Segundo Bendsoe (1995), o objetivo destecoeciente aumentar o nmero de iteraes desacelerando a convergncia do mtodo, ento estabilizando o processo degerao da topologia tima. Alm disso, para evitar que mudanas bruscas ocorram na distribuies de densidade relativa(x e ir de zero a um em apenas uma iterao para um dado elementoe), devemos estabelecer algum esquema numrico deatualizao para estabilizar a convergncia. Para isto, usamos o esquema descrito em Bendsoe (1995), que comparax ecom um limite mvelm , resultando em:
max{ ; x ie m } x i +1e min{1; x ie + m }, (7)
sendo = 0 , 001 um valor mnimo admissvel em um valor mximo permitido para a mudana dex e . A escolha dovalor dem varia conforme o comportamento da funo objetivo. Um valor no maior que0, 2 suciente ao considerara funo objetivo da formulao (1).
Apesar da eq. (11) ser utilizada para atualizar a distribuio de densidade, seu simples uso no processo de otimizaono evita mnimos locais, bem como frequentemente acarreta em problemas de mau condicionamento numrico. Emoutras palavras, a topologia pode conter regies em que as densidades relativas cam alternando entrex e = 0 e x e = 1 ,formando o conhecido tabuleiro de xadrez (checkerboard ) na topologia (Sigmund and Petersson, 1998).
A partir disto, para assegurar a existncia de solues no dependente da malha e sem regies de tabuleiro de xadrez,usamos a tcnica de ltragem da sensibilidade da funo objetivo, discutida em Sigmund (1997). Atravs da mdia
-
7/22/2019 Uma Metodologia Para o Projeto da Topologia tima de Estuturas Usando Programao Inteira Mista
4/10
V I I C o n g r e s s o N a c i o n a l d e E n g e n h a r i a M e c n i c a , 3 1 d e j u l h o a 0 3 d e A g o s t o 2 0 1 2 , S o L u s -
M a r a n h o
ponderada das sensibilidades dos elementos vizinhos, o ltro tem como objetivo alterar a sensibilidade da funo objetivopara o dado elemento em anlise de forma a uniformizar a distribuio de densidade relativa. A sensibilidade ltradade um elementoe pode ser obtida por:
C
x e =1
x en ev
i =1
H e
n ev
i =1 H e x eC
x e , (8)
sendo o operador de convoluo do processo de ltragem dado por:
H e = r min dist (e, i ), (9)
em quer min representa o raio da rea de atuao do ltro medida do centro do elementoe at o seu ltimo elementovizinho;n ev corresponde ao nmero de elementos vizinhos de acordo com o valor der min ; e, dist (e, i ) a distncia docentro do elementoe ao centro do elementoi. O valor deH e zero fora da rea de ltragem do elementoe. Em termosde representao, a rea de ao do ltro corresponde a um quadrado formado ao redor do elementoe.
Apresentamos no Algoritmo 1 uma breve descrio dos passos para obter a topologia tima de uma estrutura commxima rigidez a partir das equaes e formulaes apresentadas anteriormente. Este algoritmo foi, ento, codicado emMatlab , verso R2008b para sistema operacional Linux, para a execuo de testes numricos. Mais detalhes sobre estespassos podem ser encontrados em Bendsoe (1995), Sigmund (2001) e Guimares (2005).
Algoritmo 1: Algoritmo para otimizar uma topologia com mxima rigidez usando o critrio de otimalidade comltro.
Entrada: nmero de elementosn x e n y nos eixosx e y, respectivamente; frao de volumef v ; potncia depenalidadep; e, raior min .
Sada: densidade relativax e de cada elemento nitoe.Faa cada varivelx e , para todos os elementose, terem valor igual f v .1.1enquantohouver mudana em qualquer x e maior que 0, 01 faa1.2
Obter U resolvendo-se a equao de equilbrio (1.i) usando o mtodo dos elementos nitos.1.3Realizar o clculo da sensibilidadedc da funo objetivo presente na formulao (1).1.4Aplicar o ltro, descrito na eq. (8), na sensibilidadedc para evitar mnimos locais.1.5Atualizar a estrutura da topologia: aplicar a eq. (11) para obter a distribuio de densidade relativax e de1.6cada elementoe.
retorna densidade relativa x e de cada elemento e.1.7
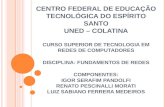
Um exemplo de aplicao do Algoritmo 1 dado na Fig. 1. A Fig. 1a ilustra uma viga engastada em toda lateralesquerda e sob a ao de um fora vertical aplicada no seu canto inferior direito. O mdulo de elasticidade correspondea 1 e fora aplicada tem valor igual a 1 (para baixo). Os parmetros de entrada do algoritmo son x = 32 , n y = 20 ,f v = 0 , 4, p = 3 e r min = 1 , 2. A soluo resultante apresentada na Fig. 1b e foi obtida aps 71 iteraes.
(a) (b)Figura 1:(a) Viga retangular engastada sob a ao de uma fora. (b) Soluo obtida atravs do Algoritmo 1.
Na prxima seo descrevemos os passos necessrios para obter uma formulao inteira mista convexa para o prob-lema da otimizao de topologia com mxima rigidez.
4. MODELAGEM POR PROGRAMAO INTEIRA MISTA CONVEXA
A formulao no-linear (1) pode ser reformulada de forma equivalente em um modelo de programao inteira 0-1mista (Stolpe and Svanberg, 2003), (Stolpe, 2007), garantindo assim a obteno do soluo tima global (ou prxima
-
7/22/2019 Uma Metodologia Para o Projeto da Topologia tima de Estuturas Usando Programao Inteira Mista
5/10
V I I C o n g r e s s o N a c i o n a l d e E n g e n h a r i a M e c n i c a , 3 1 d e j u l h o a 0 3 d e A g o s t o 2 0 1 2 , S o L u s -
M a r a n h o
dela) atravs de mtodos, por exemplo, do tipobranch-and-bound ou branch-and-cut (Wolsey, 1998). Antes de maisnada, reescrevemos a formulao (1) como um modelo no-convexo misto 0-1, a saber:
minimizar F T U
sujeito a :( i ) KU = F
( ii )n
e =1x e f v
( iii ) U min U U max
( iii ) x e {0, 1} e = 1 , 2, . . . , n .
(10)
em quex e , parae = 1 , . . . , n , e U so as variveis de projeto,U T KU = F T U e, neste modelo,0 < f v < n , sendof vum valor inteiro. Assumindo que a matriz de rigidezK linear com relao a varivel de decisox , sabemos que:
K =
n
e=1x e B
T e E e B e , (11)
em queB e R q d a matriz deslocamento-deformao; e,E e R q q a matrizde elasticidadedo material. Assumimoso estado plano de tenses e o material isotrpico com comportamento linearmente elstico. As matrizesB e so obtidasatravs de integrao numrica usando, por exemplo, a quadratura de Gauss (Cooket al. , 2001). Para computar o valor deq devemos observar a dimenso da estrutura, o tipo de elemento nito e o nmero de pontos na integrao pela quadraturade Gauss. Ento, ao considerar uma estrutura bidimensional retangular, discretizada em elementos nitos retangulares de4-ns cuja funo de forma bilinear, obtemosq = 12 .
O primeiro passo consiste em desagregar as equaes de equilbrio (1.i), com a introduo de novas variveis dedeciso representando a tenso em cada elemento nitoe, isto s e R q tal que:
s e = x e E e B e U. (12)A partir da eq. (12), a equao de equilbrio pode ser reescrita como:
KU =n
e=1
x e B T e E e B e U =n
e=1
B T e s e = BT s = F, (13)
em que a matrizB T R d nq e o vetors R nq .Note ques e = x e E e B e U representa um conjunto deq igualdades bilineares emx e e U . O prximo passo consiste
em transformar cada uma destas igualdades bilineares em uma equivalente linear. Por simplicidade, consideramos apenasuma dasq igualdades bilineares, ou seja,s = xbT U , sendos R , x 0, 1 e b R d . Glover (1984) e Adamset al.(2004) apresentaram uma abordagem para transformar uma igualdade bilinear em uma equivalente linear. Este processoser descrito logo em seguida e de forma breve.
Sabendo quex {0, 1}, a equaos = xbT U pode ser dada por:
s = 0 , se x = 0 , ous = bT U, se x = 1 .
(14)
Da eq. (2) sabemos queU limitado, logobT U tambm , de forma que limites laterais,cmin inferior ecmax superior,parabT U podem ser obtidos como:
cmin = ( bT )+ umin + ( bT ) umax , ecmax = ( bT )+ umax + ( bT ) umin ,
(15)
em quea + e a representama+ = max a, 0 e a = min a, 0, respectivamente. Casob seja um vetor ou matriz, seguequeb+ e b so calculados para cada um de seus componentes.
Para satisfazers = 0 , se x = 0 , da eq. (14), necessrio introduzir duas desigualdades lineares, a saber:
-
7/22/2019 Uma Metodologia Para o Projeto da Topologia tima de Estuturas Usando Programao Inteira Mista
6/10
V I I C o n g r e s s o N a c i o n a l d e E n g e n h a r i a M e c n i c a , 3 1 d e j u l h o a 0 3 d e A g o s t o 2 0 1 2 , S o L u s -
M a r a n h o
s xc min , es xc max .
(16)
O mesmo se mantm para satisfazers = bT U, se x = 1 da eq. (14), isto ,
bT U s (1 x)cmin , ebT U s (1 x)cmax .
(17)
Observe que sex = 0 , entos = 0 , da eq. (16). Por outro lado, sex = 1 , entos = bT U , da eq. (17). Umadescrio detalhada destas transformaes pode ser obtida em Stolpe and Svanberg (2003) e Stolpe (2007). Note queagora podemos aplicar o mesmo procedimento que originou as eqs. (16) e (17) com a igualdade bilinear (12), ou seja,transformando-a em quatro desigualdades lineares, a saber:
s e x e cemin , e = 1 , . . . , n ;s e x e cemax , e = 1 , . . . , n ;
E e B e U s e (1 x e )cemin , e = 1 , . . . , n ;E e B e U s e (1 x e )cemax , e = 1 , . . . , n ;
(18)
em quecemin e cemax so os limites inferiores e superiores calculados, respectivamente, como:
cemin = ( E e B e )+ u min + ( E e B e ) u max , e
cemax = ( E e B e )+ umax + ( E e B e ) umin .
(19)
No entanto, ainda restam as restries para evitar uma topologia sem conectividade e a presena de regies comtabuleiro de xadrez. Visando facilitar a escrita destas restries, assumiremosx e = x(i, j ), isto , o e-simo elementonito na topologia corresponde ao i-simo elemento na direo horizontal e j-simo elemento na direo vertical. Ento,para evitar uma topologia sem conectividade entre os elementos, escrevemos o seguinte conjunto de restries:
x (i, j 1) + x(i, j + 1) + x(i + 1 , j ) + x(i 1, j ) x(i, j ), x(i, j ) F , (20)
e
x (i, j 1) + x(i, j + 1) + x(i + 1 , j ) + x(i 1, j ) 2x(i, j ), x (i, j ) I , (21)
emqueF e I so os conjuntos contendo todos os elementos nitos da fronteira e do interior da topologia, respectivamente.O conjunto de restries (20) diz que pelo menos um dos vizinhos dex(i, j ) deve conter material sex(i, j ) est nafronteira, enquanto que as restries (21) asseguram que pelo menos dois vizinhos dex(i, j ) devem conter material, casotal elemento esteja no interior da topologia.
Por outro lado, as restries que evitam regies com tabuleiro de xadrez so dadas por:
x (i, j ) x(i, j + 1) + x(i + 1 , j + 1) x(i + 1 , j ) 1, (i, j ) T ,x (i, j ) x(i, j + 1) + x(i + 1 , j + 1) x(i + 1 , j ) 1, (i, j ) T ,
(22)
em queT contmtodos os subconjuntosde dois a dois elementos, isto, um quadrado comquatro elementos. A ideia desteconjunto de restries, para cada quadrado com quatro elementos, est em evitar que apenas os elementos da diagonal(principal ou secundria) deste quadrado contenham material, enquanto que os outros no.
Com as modicaes feitas acima, podemos agora reescrever a formulao (10) equivalentemente como um programalinear 0-1 misto que resolve o problema da topologia tima globalmente, a saber:
-
7/22/2019 Uma Metodologia Para o Projeto da Topologia tima de Estuturas Usando Programao Inteira Mista
7/10
V I I C o n g r e s s o N a c i o n a l d e E n g e n h a r i a M e c n i c a , 3 1 d e j u l h o a 0 3 d e A g o s t o 2 0 1 2 , S o L u s -
M a r a n h o
minimizar F T U
sujeito a :
( i )n
e =1B T e s e = F
( ii )n
e =1x e f v
( iii ) s e x e cemin e = 1 , . . . , n
( iv ) s e x e cemax e = 1 , . . . , n
(v ) E e B e U s e (1 x e )cemin e = 1 , . . . , n
(vi ) E e B e U s e (1 x e )cemax e = 1 , . . . , n
(vii ) x ( i, j 1) + x ( i, j + 1) + x ( i + 1 , j ) + x ( i 1, j ) x ( i, j ) x ( i, j ) F
(viii ) x ( i, j 1) + x ( i, j + 1) + x ( i + 1 , j ) + x ( i 1, j ) 2x ( i, j ) x ( i, j ) I
( ix ) x ( i, j ) x ( i, j + 1) + x ( i + 1 , j + 1) x ( i + 1 , j ) 1 ( i, j ) T
(x ) x ( i, j ) x ( i, j + 1) + x ( i + 1 , j + 1) x ( i + 1 , j ) 1 ( i, j ) T
(xi ) U min U U max
(xii ) x e {0, 1} e = 1 , 2, . . . , n .
(xiii ) s e R q e = 1 , 2, . . . , n .
(23)
Como a formulao (23) contm variveis que representam a tenso em cada elemento, torna-se importante incluirrestries de tenso que podem evitar falhas de fratura ou fadiga na topologia tima resultante. Seguindo Stolpe andSvanberg (2003), as restries de tenso podem ser escritas como:
s e x e emin , e = 1 , . . . , n ,s e x e emax , e = 1 , . . . , n ,
(24)
em que emin R q e emax R q so limitantes para os valores de tenso. Uma forma simples para obter os limites dedeslocamento e de tenso consiste em resolver a equao de equilbrioK U = F para U , assumindo quex e = 1 , paratodo elemento nitoe. Desta forma, os limites de descolamento so computados por:
U imax = 2 max {|U |} , i = 1 , . . . , d ,U min = 2U max ,
(25)
enquanto que os limites para a tenso, calculada comoe = E e B e U e contendo as componentes x , y e xy , so dadospor:
xmax = ymax = max {| x | , | y |} , xmin =
ymin = xmax ,
xymax = max {| xy |} , xymin = xymax ,
(26)
em que emax = ( xmax , ymax , xymax , . . . , xmax , ymax , xymax )T e emin = emax , parae = 1 , . . . , n .Em testes preliminares e seguindo Stolpe and Svanberg (2003) e Stolpe (2007), a formulao (1) com as restries
adicionais (24) foi codicada em Matlabe resolvida atravs de um algoritmobranch-and-bound . O algoritmo fornecidopelo pacote comercial ILOG CPLEX, verso 12, foi utilizado.
Entretanto, como discutido em Rasmussen and Stolpe (2008), a obteno de solues com algoritmosbranch-and-bound puro tm acarretado em elevado tempo computacional, j que notrio o grande nmero de variveis de deciso erestries na formulao (23), mesmo para problemas razoavelmente pequenos. Para um exemplo apresentado em Stolpeand Svanberg (2003), envolvendo uma viga bidimensional biapoiada e com uma nica fora aplicada para baixo, talalgoritmo gastou cerca de 63 mil segundos em um computador SUN Ultra-Enterprise 4000 com processador UltraSparcde 250 MHz. Os dados da estrutura foramn = 35 , f v = 22 e d = 89 , representando um problema realmente pequeno emvista dos problemas de interesse prtico.
-
7/22/2019 Uma Metodologia Para o Projeto da Topologia tima de Estuturas Usando Programao Inteira Mista
8/10
V I I C o n g r e s s o N a c i o n a l d e E n g e n h a r i a M e c n i c a , 3 1 d e j u l h o a 0 3 d e A g o s t o 2 0 1 2 , S o L u s -
M a r a n h o
5. A METODOLOGIA PROPOSTA
Com o objetivo de diminuir o tempo computacional gasto usando apenas o algoritmobranch-and-bound para resolvera formulao (23), apresentamos abaixo uma combinao do Algoritmo 1 com obranch-and-bound fornecido pelo ILOGCPLEX . A ideia usar a soluo retornada pelo Algoritmo 1 como ponto de partida para o algoritmobranch-and-bound ,reduzindo, ento, o tempo gasto pelobranch-and-bound .
Algoritmo 2: Metodologia para a otimizao de topologia usando o critrio de otimalidade com ltro e umalgoritmobranch-and-bound .
Entrada: nmero de elementosn x e n y nos eixosx e y, respectivamente; frao de volumef v ; potncia depenalidadep; e, raior min .
Sada: densidade relativax e de cada elemento nitoe.sol soluo obtida aps aplicao do Algoritmo 1, critrio da otimalidade com ltro, nos dados de2.1entrada.CalculeU min , U max de acordo com a eq. (25).2.2Calculemin , max de acordo com a eq. (26).2.3x resovler a formulao (23) com as restries adicionais (24),adicionando sol como soluo inicial2.4vivel para o algoritmobranch-and-bound do pacote ILOG CPLEX.retorna densidade relativa x .2.5
Em testes preliminares, a metodologia descrita no Algoritmo 2 permitiu reduo em at 10% do tempo computacionalefetivamente gasto ao usar apenas o algoritmobranch-and-bound . Caso o objetivo seja diminuir ainda mais o tempocomputacional gasto, cortes e desigualdades vlidas, bem como um algoritmo paralelo, descritos em Rasmussen andStolpe (2008) podem ser utilizados.
6. CONCLUSES E TRABALHOS FUTUROS
Neste trabalho propomos uma metodologia para resolver problemas de otimizao de topologia quando queremos amaximizao da rigidez da estrutura em anlise. Inicialmente, discutimos o mtodo do critrio de otimalidade e um ltrousado em conjunto para obter solues com conectividade entre os elementos e sem as regies com tabuleiro de xadrez.
Um algoritmo para este mtodo, bem como um exemplo de sua execuo tambm foram apresentados.Em seguida, mostramos como reformular uma formulao no-convexa do problema de otimizao de topologiaem uma equivalente na forma inteira mista convexa. Discutimos questes sobre o tempo computacional gasto por umaestratgia pura do tipobranch-and-bound para resolver a formulao inteira mista convexa. Conclumos que o tempo deprocessamento gasto um dos principais gargalos ao usar esta estratgia. Por m, foi mostrado como combinar a tcnicado critrio de otimalidade com a estratgiabranch-and-bound a m de obter solues timas globalmente em um tempomenor de processamento.
Apesar da metodologia proposta ainda estar em fase de validao, testes preliminares mostraram sua eccia. Con-seguimos solues gastando at 10% menos tempo de processamento comparado ao uso puro da estratgiabranch-and-bound . Como trabalho futuro, desejamos realizar testes em vrias instncias da literatura com o objetivo de comparara soluo em termos do tempo de processamento gasto. Ento, comprovar a ecincia da metodologia proposta. Almdisso, extenses desta metodologia para usar computao paralela e considerar a insero de desigualdades vlidas na for-mulao devem ser propostas. Explorar a estrutura interna da formulao inteira mista convexa de interesse, tanto parans tericos (desenvolvimento de cortes e desigualdades vlidas), como prticos (algoritmos especcos para a estruturaem questo).
7. AGRADECIMENTOS
Os autores agradecem o apoio nanceiro recebido pelo CNPq (processo no.: 483604/2011-9).
8. REFERNCIAS
Adams, W., Forrester, R. and Glover, F., 2004. Comparisons and enhancement strategies for linearizing mixed 0-1quadratic program.Discret. Optim. , Vol. 1, pp. 99120.
Beckers, M., 1999. Topology optimization usinga dual method with discrete variables.Structural Optimization , Vol. 17,pp. 1424.
Bendsoe, M. and Sigmund, O., 2003.Topology optimization: theory, methods and applications . Ed. Springer, New York,USA.
Bendsoe, M.P., 1995.Optimization of structural topology, shape and material . Ed. Springer, Berlin, Heidelberg, NewYork.
-
7/22/2019 Uma Metodologia Para o Projeto da Topologia tima de Estuturas Usando Programao Inteira Mista
9/10
V I I C o n g r e s s o N a c i o n a l d e E n g e n h a r i a M e c n i c a , 3 1 d e j u l h o a 0 3 d e A g o s t o 2 0 1 2 , S o L u s -
M a r a n h o
Bendsoe, M.P. and Sigmund, O., 1999. Material interpolations in topology optimization.Arch. Appl. Mech. , Vol. 69,pp. 635654.
Chapman, C.D. and Jakiela, M.J., 1996. Genetic algorithm-based structural topology design with compliance and topol-ogy simplication considerations.Journal of Mechanical Design , Vol. 118, pp. 8998.
Cook, R., Malkus, D., Plesha, M. and Witt, R., 2001.Concepts and applications of nite element analysis . Ed. Wiley,New York, USA, 4th edition.
Eschenauer, H. and Olhoff, N., 2001. Topology optimization of continuum structures: a review.Appl. Mech. Rev. , Vol.54(4), pp. 331390.
Ghaddar, C., Maday, Y. and Patera, A.T., 1995. Analysis of a part design procedure.Numerische Mathematik , Vol. 71,pp. 465510.
Glover, F., 1984. An improved mip formulation for products of discrete and continuous variables.J. Inf. Optim. Sci. ,Vol. 5, pp. 469471.
Guimares, T.A., 2005.Aplicao da tcnica de otimizao topolgica ao projeto de clulas de stents para angioplastia .Ph.D. thesis, Programa de Ps-Graduao em Engenharia Mecnica - FEMEC, Universidade Federal de Uberlndia,Uberlndia - MG.
Kirsch, U., 1990. On singular topologies in optimum structural design.Structural Optimization , Vol. 2, pp. 133142.Maute, K., Schwarz, S. and Ramm, E., 1998. Adaptive topology optimization of elastoplastic structures.Struct. Optim. ,
Vol. 15, pp. 8191.
Mlejnek, H.P., 1992. Some aspects of the genesis of structures.Struct. Optim. , Vol. 5, pp. 6469.Petersson, J., 2001. On continuity of the design-to-state mappings for trusses with variable topology.International Journal of Engineering Science , Vol. 39, pp. 11191141.
Rasmussen, M.H. and Stolpe, M., 2008. Global optimization of discrete truss topology design problems using a parallelcut-and-branch method.Computers and Structures , Vol. 86, pp. 15271538.
Rozvany, G.I.N., 2001. On design-dependent constraints and singular topologies.Structural and MultidisciplinaryOptimization , Vol. 21, pp. 164172.
Sigmund, O., 1997. On the design of compliant mechanisms using topology optimization.Mech. Struct. Mach. , Vol. 25,pp. 495526.
Sigmund, O., 2001. A 99 line topology optimization code written in matlab.Struct. Optim. , Vol. 21, pp. 120127.Sigmund, O. and Petersson, J., 1998. Numerical instabilities in topology optimization: a survey on procedures dealing
with checkerboards, mesh-dependencies and local minima.Struct. Optim. , Vol. 16, pp. 6875.Stolpe, M., 2007. On the reformulation of topology optimization problems as linear or convex quadratic mixed 0-1
programs.Optim. Eng. , Vol. 8, pp. 163192.Stolpe, M. and Svanberg, K., 2001. On the trajectories of the epsilon-relaxation approach for stress-constrained truss
topology optimization.Structural and Multidisciplinary Optimization , Vol. 21(2), pp. 140151.Stolpe, M. and Svanberg, K., 2003. Modeling topology optimization problems as linear mixed 0-1 programs.Int. J.
Numer. Methods. Eng. , Vol. 57(5), pp. 723739.Svanberg, K., 1987. The method of moving asymptotes - a new method for structural optimization.Int. J. Numer. Meth.
Engrg. , Vol. 24, pp. 359373.Vanderplaats, G.N., 1999.Numerical Optimization Techniques for Engineering Design . Ed. Colorado Springs, Vander-
plaats Research & Development Inc., 3rd edition.Wolsey, L.A., 1998.Integer Programming . Ed. Wiley.Zhou, M. and Rozvany, G.I.N., 1991. The coc algorithm, part ii: Topological, geometry and generalized shape optimiza-
tion.Comp. Meth. Appl. Mech. Engrng , Vol. 89, pp. 197224.
9. DIREITOS AUTORAIS
Os autores so os nicos responsveis pelo contedo do material impresso includo no seu trabalho.
-
7/22/2019 Uma Metodologia Para o Projeto da Topologia tima de Estuturas Usando Programao Inteira Mista
10/10
V I I C o n g r e s s o N a c i o n a l d e E n g e n h a r i a M e c n i c a , 3 1 d e j u l h o a 0 3 d e A g o s t o 2 0 1 2 , S o L u s -
M a r a n h o
METHODOLOGY TO THE PROJECT OF OPTIMAL TOPOLOGY OFSTRUCTURES USING MIXED INTEGER PROGRAMMING
Thiago Alves de queiroz, [email protected] Anderson Guimares, [email protected] Federal University of Gois, Departaments of Mathematics - DM/CAC, 75704-020, Catalo-GO, Brazil
Abstract: Topology Optimization is a mechanical design tool which seeks the best material distribution of a structure.Traditionally, most of the methods used in the literature for computing the optimal topologies are based on the optimalitycriteria method. In this work, we propose a methodology for computing the optimal topologies by combining an optimalitycriteria method with a mixed integer programming approach. A ltering scheme based on the average of the strain energysensitivities was also used to avoid the presence of mesh-dependent local minimum. The proposed methodology wasused to compute the optimal topologies of structures with maximum stiffness, notwithstanding it may be easily adapted toother scenarios. With the preliminary computational tests, we obtained optimal (global) solutions spent up to 10% less processing time compared with the use of a simple branch-and-bound algorithm that was used to solve the mixed integer programming. Keywords: topology optimization, optimality criteria method, mixed integer programming, global optimization.