UMA PROPOSTA DE ANÁLISE E MELHORIA DE UM...
43
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE GOIÁS PRÓ-REITORIA DE ENSINO DEPARTAMENTO DAS ÁREAS ACADÊMICAS IV COORDENAÇÃO DA ÁREA DE MECÂNICA BACHARELADO EM ENGENHARIA MECÂNICA TRABALHO DE CONCLUSÃO DE CURSO II UMA PROPOSTA DE ANÁLISE E MELHORIA DE UM PROJETO DE KART CROSS UTILIZANDO SIMULAÇÕES VIA MÉTODO DE ELEMENTOS FINITOS ÁREA DO CONHECIMENTO GRANDE ÁREA: ENGENHARIA MECÂNICA SUB-ÁREA: MÉTODOS DE SÍNTESE E OTIMIZAÇÃO APLICADOS AO PROJETO MECÂNICO ALUNOS: CRISTIANO FARIA DE OLIVEIRA 20111010970113 PEDRO AUGUSTO VEIGA CANEDO 20111010970032 ORIENTADOR: DR. JOSÉ LUIZ DE OLIVEIRA PENA GOIÂNIA, JULHO / 2015
Transcript of UMA PROPOSTA DE ANÁLISE E MELHORIA DE UM...
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE GOIÁS
PRÓ-REITORIA DE ENSINO
DEPARTAMENTO DAS ÁREAS ACADÊMICAS IV
COORDENAÇÃO DA ÁREA DE MECÂNICA
BACHARELADO EM ENGENHARIA MECÂNICA
TRABALHO DE CONCLUSÃO DE CURSO II
UMA PROPOSTA DE ANÁLISE E MELHORIA DE UM PROJETO DE
KART CROSS UTILIZANDO SIMULAÇÕES VIA MÉTODO DE
ELEMENTOS FINITOS
ÁREA DO CONHECIMENTO
GRANDE ÁREA: ENGENHARIA MECÂNICA
SUB-ÁREA: MÉTODOS DE SÍNTESE E OTIMIZAÇÃO APLICADOS AO
PROJETO MECÂNICO
ALUNOS: CRISTIANO FARIA DE OLIVEIRA 20111010970113
PEDRO AUGUSTO VEIGA CANEDO 20111010970032
ORIENTADOR: DR. JOSÉ LUIZ DE OLIVEIRA PENA
GOIÂNIA, JULHO / 2015

INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE GOIÁS
DEPARTAMENTO DE ÁREAS ACADEMICAS IV
COORDENAÇÃO DE MECÂNICA
UMA PROPOSTA DE ANÁLISE E MELHORIA DE UM PROJETO DE KART
CROSS UTILIZANDO SIMULAÇÕES VIA MÉTODO DE ELEMENTOS
FINITOS
ALUNOS: CRISTIANO FARIA DE OLIVEIRA 20111010970113
PEDRO AUGUSTO VEIGA CANEDO 20111010970032
TRABALHO DE CONCLUSÃO DE CURSO COMO
PARTE DOS REQUISITOS NECESSÁRIOS PARA
OBTENÇÃO DO TÍTULO DE BACHAREL EM
ENGENHARIA MECÂNICA
APROVADO POR:
__________________________________________
JOSÉ LUIZ DE OLIVEIRA PENA, Doutor, IFG (ORIENTADOR)
________________________________________
RONAY PEREIRA DE ANDRADE, Mestre, IFG (EXAMINADOR INTERNO)
_______________________________________
SIGEO KITATANI JÚNIOR,Mestre, UFG (EXAMINADOR EXTERNO)
GOIÂNIA, 06 de Julho de 2015.

RESUMO
Este trabalho tem como objetivo principal a análise e posterior melhoria de um chassi tipo
Spaceframe utilizado em Kart-Cross. A análise será realizada por meio do método numérico de
elementos finitos utilizando o pacote de software livre SALOMÉ-MECA, disponível para
plataforma Linux. O estudo também abrangerá os experimentos e simulações de esforços estáticos e
dinâmicos, cujos resultados serão utilizados como base para possíveis melhorias quanto à escolha
do material empregado e a dimensão dos elementos utilizados, considerando a redução de peso e
garantia dos níveis de resistência e fatores de segurança. No trabalho será simulado um ensaio
torcional do chassi empregando as recomendações do INMETRO, para este tipo de veículo ou
veículos que sofram alteração em sua estrutura original. Por meio de simulação, também será
realizada uma comparação entre um projeto de Kart-Cross comumente adotado como referência
pela comunidade de competidores e outro que segue as normas definidas pela Confederação
Brasileira de Automobilismo (CBA). Ao final deste estudo, espera-se obter um chassi com melhor
capacidade de resistência mecânica, proporcionando maior segurança ao condutor do veículo,
graças a melhoria do projeto, culminando em uma ando maior eficiência do veículo final.
PALAVRAS-CHAVE: Kart-Cross, Elementos Finitos, Chassi, SALOMÉ-MECA.
ABSTRACT
The main intent of this experiment is to analyze the chassis type SpaceFrame utilized in
Kart-Cross to further advance its function. It will be done using a numeric finite element method
through software SALOME-MECA, available for Linux platform. The study also will cover
experiments and simulations of its statics and dynamics, and the results will be used as a base for a
better material quality and the dimension utilized, taken into consideration weight reduction,
guarantee level of resistance and safety issues. This experiment will also simulate a torsional test of
the chassi by applying the INMETRO recommendations for this type of vehicle or vehicles that had
the original structure compromised. While doing this simulation, a comparison will be made
between a Kart-Cross generally adopted as reference by the competitors league and another that
follows the rules defined by the Confederacao Brasileira de Automobilismo (CBA). As result, we
hope to have obtained a Chassis with a much better resistant capacity, providing more safety to the
vehicle’s conductor, along with a better dimension, assuring efficiency to the final product.
KEYWORDS: Kart-Cross, Finite Elements, Chassi, SALOMÉ-MECA.

LISTA DE TABELAS
Tabela 1: Cargas usadas no ensaio de ordem de marcha – projeto original e projeto CBA
Página 20
Tabela 2: Esforços, Tensões e coeficientes de segurança obtidos para a simulação do ensaio de ordem de marcha - projeto original
Página 21
Tabela 3: Esforços, tensões e coeficientes de segurança para a simulação do ensaio de ordem de marcha – projeto CBA
Página 22
Tabela 4: Quadro resumo dos resultados obtidos para estrutura original e estrutura CBA
Página 23
Tabela 5: Esforços, tensões e coeficientes de segurança obtidos na simulação do ensaio de torção para o projeto original
Página 26
Tabela 6: Esforços, tensões e coeficientes de segurança obtidos na simulação do ensaio de torção para o projeto CBA
Página 27

LISTA DE ILUSTRAÇÕES
Figura 1: Chassi Categoria V8 Stars Alemã (Speedcafe) Página 01
Figura 2: Competição do Projeto Baja Brasil (Baja CEM-UFSC) Página 02
Figura 3: Etapa do Campeonato Gaúcho de Velocidade em Pista de Terra(Velocar Encruzilhada do Sul)
Página 03
Figura 4: Chassi spaceframe Peugeot (3M 4x4 Off Road Racing) Página 04
Figura 5: Modelos discretizados de estruturas reticuladas Página 07
Figura 6: Exemplo de malha de elementos finitos Página 08
Figura 7: Deformação da Viga de Timoshenko e de Euler-Bernoulli Página 11
Figura 8: Interface do módulo ParaVis no software Salomé-Meca. Página 14
Figura 9: Projeto Kart Cross obtido na internet em 2D Página 15
Figura 10: Modelo tridimensional do Chassi Página 16
Figura 11:Vistas da geometria obtida utilizando o módulo GEOMETRY Página 17
Figura 12: Malha gerada no módulo MESH Página 18
Figura 13: Deformação em ordem de marcha para estrutura original Página 20
Figura 14: Deformação em ordem de marcha para estrutura CBA Página 22
Figura 15: Deflexões da Estrutura original, Paravis do Salome. Página 25
Figura 16: Deflexões da Estrutura CBA, Paravis do Salome. Página 26
Figura 17: Modos de Vibração da estrutura CBA, Paravis do Salome. Página 28

SUMÁRIO 1. INTRODUÇÃO 01
2. ASPECTOS TEÓRICOS 05
2.1 Estruturas veiculares 05
2.2 Filosofia do Método de Elementos Finitos 06
2.3 Substanciação teórica para a definição do elemento usado nas simulações 10
2.4 Teoria de falhas para materiais dúcteis sob carregamento estático 11
2.5 A definição do modelo e da base física utilizada 13
2.6 A etapa de pós-processamento 14
3. METODOLOGIA 15
3.1 Modelagem utilizando vigas de Timoshenko 18
3.2 Unidades adotadas 18
4. SIMULAÇÕES E APRESENTAÇÃO DOS RESULTADOS 19
4.1 Simulação de ensaio em ordem de marcha 19
4.1.1 Simulação de ensaio em ordem de marcha para o projeto original 19
4.1.2 Simulação de ensaio em ordem de marcha para os dados da CBA 21
4.2 Simulação do ensaio de torção (INMETRO) 24
4.2.1 Ensaio de torção – projeto original 25
4.2.2 Ensaio de torção - CBA 26
4.3 Análise modal para o projeto original 27
5. CONCLUSÕES E SUGESTÕES PARA TRABALHOS FUTUROS 31
REFERÊNCIAS BIBLIOGRÁFICAS 33
ANEXOS

1
1. INTRODUÇÃO O chassi pode ser considerado como o principal elemento estrutural de um veículo
automotivo. Por isso deve ser cuidadosamente projetado e analisado para suportar os esforços
e as cargas as quais será submetido. De uma forma geral, a estrutura do chassi, além de
resistir às solicitações, deve conferir segurança e conforto aos seus ocupantes. Sendo assim, o
projeto assume um papel fundamental para a garantia desses quesitos, e todas as ferramentas
que possam auxiliar no desenvolvimento e no aumento da confiabilidade do produto final
devem ser consideradas relevantes.
Na Figura 1 é apresentada uma estrutura tubular de um chassi da Categoria V8 Stars
Alemã.
Figura 1: Chassi Categoria V8 Stars Alemã (Speedcafe).
Com o intuito de verificar a segurança e a robustez de um projeto de chassi
frequentemente adotado como referência pelos competidores, propõe-se sua análise e possível
aperfeiçoamento utilizando o Método de Elementos Finitos.
A escolha deste tipo de chassi como objeto de estudo foi motivada, inicialmente, pelo
Projeto Baja SAE (Society of Automotive Engineers), que acontece nos Estados Unidos da
América desde 1976. Em termos gerais, o Projeto Baja é uma competição acadêmica e tem
como objetivo aplicar os conhecimentos adquiridos em salas de aula e preparar o aluno para o
mercado de trabalho. Em 1991, a SAE iniciou suas atividades no Brasil e, em 1994, lançou o
Projeto Baja SAE BRASIL, mas a primeira competição em solo brasileiro só aconteceu no
ano seguinte (SAE BRASIL, 2010).
Os Regulamentos Baja SAE BRASIL (RBSB) definem as regras e atividades correlatas

2
que integram a competição. As premissas que compõem o projeto são: veículo protótipo, fora
de estrada (offroad), mono posto, de simples manutenção e operação, destinado a uso não
profissional e capaz de transitar em terrenos acidentados, sob quaisquer condições climáticas,
sem apresentar danos.
Na Figura 2 é apresentado um registro de uma competição do Projeto Baja BRASIL,
onde se pode observar as severas exigências aos quais estes veículos são submetidos.
Figura 2 - Competição do Projeto Baja Brasil (Baja CEM - UFSC).
Paralelamente ao Projeto Baja, cresce no Brasil uma modalidade de disputa de protótipo
em pisos de terra, classificados pela Confederação Brasileira de Automobilismos (CBA) de
Velocidade na Terra, mas conhecidos popularmente como Veloterra.
Atualmente a modalidade é dividida em três principais categorias: Kart Cross, Turismo
e Speed. A categoria Kart Cross, também denominada de Mini-Fórmula Tubular, é
subdividida nas categorias “A” e “B” que, basicamente, se diferenciam pelo tipo de
preparação.
A concepção de projeto do veículo de Kart Cross assemelha-se ao Projeto Baja. Esta
semelhança despertou o interesse em pesquisar sobre a modalidade, que possui normas
específicas e critérios mínimos definidos para a construção do protótipo.
O Regulamento da CBA (2013) estabelece alguns critérios quantitativos em relação à
construção do protótipo Kart Cross: o peso (em ordem de marcha); as medidas (dimensões
máximas e mínimas, tipo de seção tubular); o motor (cilindra, combustível e o ciclo); e os
demais elementos que compõem o veículo (freios, transmissão, itens de segurança, sistema de
direção, tanque de combustível e outros acessórios obrigatórios).

3
Na Figura 3 é apresentado o grid de largada de uma etapa do Campeonato Gaúcho de
Velocidade em Pista de Terra.
Figura 3 - Etapa do Campeonato Gaúcho de Velocidade em Pista de Terra (Velocar
Encruzilhada do Sul) Embora o regulamento seja bem detalhado, não menciona nenhuma exigência acerca da
responsabilidade técnica do projeto e da construção do veículo. Em sua maioria, os veículos
são produzidos de forma semi artesanal, não existindo controle e registro que comprove o
dimensionamento e fabricação do protótipo, o que resulta numa diversidade de modelos. A
ausência de memorial de cálculos, desenhos, relatórios técnicos e seleção de materiais e
componentes fundamentada em um projeto inviabiliza a comprovação da resistência mecânica
necessária para suportar as solicitações durante a prática esportiva que, quando devidamente
aplicadas, podem evitar danos ao condutor em caso de colisões.
O crescente interesse por este tipo de veículo agregado aos entusiastas pela concepção
do Projeto Baja, tem motivado o ambiente acadêmico a desenvolver projetos de pesquisa
sobre o assunto.
Estudos de RIBEIRO (2014) abordam sobre análise estrutural de um chassi de Kart
Cross, utilizando métodos de elementos finitos. São feitas análises estáticas e dinâmicas,
sendo observados resultados de carregamentos devido ao passageiro e peso de componentes
sob a estrutura, obtenção dos modos naturais de vibração, e também estudos quanto à
deformação, em diferentes pontos, da estrutura ocasionada por impactos: simulação de crash-
test.
O software ANSYS foi utilizado por FURTADO (2013) para realizar análise estrutural
de um chassi tipo ladde frame de um caminhão médio. Através da comparação de resultados
obtidos de diferentes formas de simulação, possibilita uma completa análise estrutural
estática, modal, e harmônica da estrutura.
4
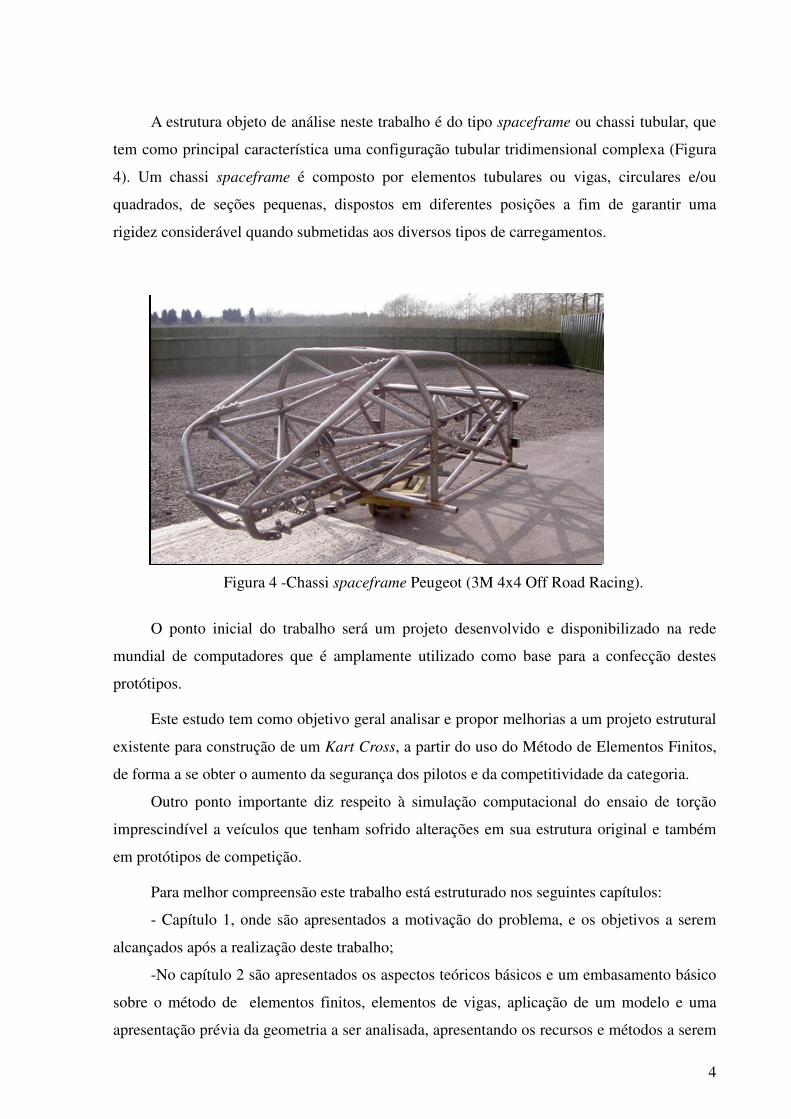
A estrutura objeto de análise neste trabalho é do tipo spaceframe ou chassi tubular, que
tem como principal característica uma configuração tubular tridimensional complexa (Figura
4). Um chassi spaceframe é composto por elementos tubulares ou vigas, circulares e/ou
quadrados, de seções pequenas, dispostos em diferentes posições a fim de garantir uma
rigidez considerável quando submetidas aos diversos tipos de carregamentos.
Figura 4 -Chassi spaceframe Peugeot (3M 4x4 Off Road Racing).
O ponto inicial do trabalho será um projeto desenvolvido e disponibilizado na rede
mundial de computadores que é amplamente utilizado como base para a confecção destes
protótipos.
Este estudo tem como objetivo geral analisar e propor melhorias a um projeto estrutural
existente para construção de um Kart Cross, a partir do uso do Método de Elementos Finitos,
de forma a se obter o aumento da segurança dos pilotos e da competitividade da categoria.
Outro ponto importante diz respeito à simulação computacional do ensaio de torção
imprescindível a veículos que tenham sofrido alterações em sua estrutura original e também
em protótipos de competição.
Para melhor compreensão este trabalho está estruturado nos seguintes capítulos:
- Capítulo 1, onde são apresentados a motivação do problema, e os objetivos a serem
alcançados após a realização deste trabalho;
-No capítulo 2 são apresentados os aspectos teóricos básicos e um embasamento básico
sobre o método de elementos finitos, elementos de vigas, aplicação de um modelo e uma
apresentação prévia da geometria a ser analisada, apresentando os recursos e métodos a serem

5
utilizados;
- a apresentação dos resultados preliminares e otimizados, simultaneamente com as
discussões;
- comentários e conclusão, incluindo sugestões para aplicabilidade e estudos futuros.
2. ASPECTOS TEÓRICOS
2.1 Estruturas veiculares
Segundo OLIVEIRA (2007), as estruturas veiculares possuem características específicas que
combinam concepção e utilização. Os parâmetros do projeto de uma estrutura veicular, tais como:
massa, dimensões, rigidez e custo, devem estar relacionados. O autor afirma ainda que para obter
um projeto bem sucedido é necessário atender a alguns requisitos:
- a durabilidade do chassi deve igual ou superior à vida útil do veículo, considerando as
falhas por fadiga;
- a estrutura deve suportar o peso próprio e os demais componentes, preservando suas
funcionalidades;
- a rigidez deve corresponderas condições submetidas, garantindo a dirigibilidade
através da manutenção dos pontos de ancoragem da suspensão em níveis constantes.
As definições da forma e do arranjo geométrico contribuem para a rigidez da estrutura,
sendo a forma triangular a base para o desenvolvimento de uma estrutura rígida. Um ponto
relevante para os projetistas são os deslocamentos e deformações, quando a estrutura é
submetida aos esforços excessivos de flexão e torção. Outro aspecto a ser considerado na
concepção de projeto é a seleção de materiais, que deve levar em conta não só os critérios de
projeto, mas também aspectos relativos à fabricação e construção de veículos.
Segundo Oliveira (apud ADAMS, 1993), existem dois aspectos relativos à rigidez
estrutural de um chassi:
• Rigidez à flexão: propriedade estática referente à maneira como o chassis sofre
deflexão à medida que o mesmo é submetido a esfoços verticais na região do entre-eixo,
sendo proporcional ao módulo de elasticidade (E) e do momento de inércia (I), é uma
propriedade estática relacionada à deformação quanto aos carregamentos verticais localizados
entre os eixos dos veículos: motor, transmissão, passageiros e o peso próprio da estrutura;
• Rigidez torcional relacionada à deformação quando a estrutura é submetida a um
momento aplicado em torno do seu eixo longitudinal. Um exemplo é o ensaio de torção

6
aplicado pela rede acreditada pelo Instituto Nacional de Metrologia, Normalização e
Qualidade Industrial (INMETRO) durante a inspeção veicular.
O processo de fabricação exige certa habilidade do construtor devido ao processo de
soldagem, principalmente dos elementos circulares, sendo viável economicamente para uma
baixa escala de produção.
2.2 Filosofia do Método de Elementos Finitos
Muitos problemas de engenharia tem resolução analítica trabalhosa e demorada.
Entretanto, a obtenção de respostas confiáveis e exatas está diretamente relacionada a
sistemas com geometria relativamente simples e características físicas bem definidas. Para
situações onde a busca por uma solução analítica for inviável, como por exemplo, naqueles
em que a geometria é complexa a solução pode ser obtida a partir da discretização do modelo
que representa o estudo em questão para em seguida aplicar as leis que governam o problema
a cada elemento. Esta abordagem permite a obtenção de uma resposta aproximada, cujo
sucesso está relacionado diretamente com o número de elementos definidos na discretização,
e na seleção da função de interpolação referente ao modelo físico que melhor representa a
utilização.
Com o avanço dos recursos computacionais, a ferramenta Método de Elementos Finitos
(MEF) tornou-se cada vez mais presente na vida de profissionais da área de engenharia, sendo
utilizada com a finalidade de emular sistemas complexos presentes e apresentar resultados
mais próximos da realidade, diminuindo ao máximo a margem de erro.
Outra grande vantagem da aplicação do Método de Elementos Finitos em engenharia
reside na possibilidade de se avaliar o efeito da mudança das variáveis do projeto, como por
exemplo: material, geometria e condições de contorno, dentre outras, em sua performance,
reduzindo assim os custos com a confecção de diversos protótipos para cada situação.
O MEF funciona como transformador de sistemas contínuos em sistemas discretos, ou
seja, divide em partes infinitesimais um sistema de característica complexa, e consiste em
métodos numéricos que interpolam equações diferenciais ordinárias e parciais descritas na
fronteira de cada uma das pequenas partes do sistema discretizado. Cada uma destas pequenas
partes está ligada às partes adjacentes por nós. As forças às quais o sistema complexo está
submetido são calculadas para cada um dos elementos infinitesimais, e os resultados de cada
um é repassado aos outros elementos através dos nós de ligação.

7
Em estruturas treliçadas, em se tratando da análise sob as leis da Mecânica dos Sólidos,
as deformações geradas pela solicitação são obtidas para cada elemento a partir dos
deslocamentos nodais de cada elemento, possibilitando encontrar a configuração deformada
da estrutura. A partir deste campo de deformações é possível assim serem calculadas as
tensões resultantes.
O MEF trabalha com dois tipos diferentes de estruturas discretizadas: as estruturas
reticuladas e elementos ou estruturas conectados continuamente.
Estruturas reticuladas são definidas como todo tipo de estrutura espacial constituída
somente por vigas ou elementos que são interconectados por juntas de ligação (Figura 6).
Neste tipo de estrutura, a interação entre todos os elementos ocorre somente nos pontos de
ligação, e todas as forças são trocadas entre os elementos somente nestes mesmos pontos.
Figura 5 - Modelos discretizados de estruturas reticuladas (Filho, 2002).
Para os elementos conectados continuamente, pequenas divisões que são ligados
somente por nós são geradas artificialmente, tentando aproximar ao máximo da situação
anterior. Esta divisão de um elemento complexo em pequenas partes é chamada de malha de
elementos finitos (Figura 6). Para que os resultados obtidos sejam os mais próximos da
realidade são necessárias algumas considerações por parte do profissional que está utilizando
o método. É de grande importância a escolha correta do elemento apropriado para modelar
uma situação física.

8
Figura 6 - Exemplo de malha de elementos finitos (UNICAMP, 1999).
A escolha do tamanho das partes de uma malha de elementos finitos é influenciada pelas
propriedades do elemento que foi escolhido para a representação do problema real. Assim
após a subdivisão de uma estrutura em pequenas partes, é recomendada a compreensão do
resultado obtido pela união das pequenas partes geradas.
Segundo Filho (2013), do ponto de vista prático, os softwares de elementos finitos
oferecem uma biblioteca de elementos de programa, contendo diversos elementos, cada qual
tentando representar um diferente comportamento físico conhecido. Esse comportamento é
descrito por intermédio de funções matemáticas que representam o comportamento interno do
elemento.
Os modelos discretizados de estruturas reticuladas apresentam uma maior facilidade na
obtenção das equações necessárias para modelar matematicamente o sistema se comparados
aos modelos aonde a reticulação da estrutura é feita artificialmente por meio da criação de
malhas. Nestas estruturas aonde é necessário à criação de uma malha para emular uma
reticulação em partes da peça, surge uma dificuldade maior devido ao fato de serem
necessárias interações para garantir contornos comuns entre as partes infinitesimais da malha,
e condições de compatibilidade de deslocamento ao longo de todos esses contornos, para
possibilitar interações matemáticas como se a estrutura fosse naturalmente reticulada.
Para realizar a análise do deslocamento de vários elementos de uma malha
simultaneamente em um computador, os cálculos de softwares de elementos finitos são
realizados na forma de álgebra matricial. O ponto inicial para a realização das interações
matemáticas é o deslocamento e a força aplicada em cada nó da fronteira dos elementos
individuais pertencentes à estrutura discretizada. Para a análise proposta, o método de
elementos finitos considera cada um desses elementos individuais como uma espécie de
“mola”, e aplica considerações físicas referentes à Lei de Hooke nos mesmos, encontrando
diversos valores de rigidez característica ao elemento, em função das forcas e deslocamentos
presentes nos nós adjacentes. Pode se contabilizar a rigidez da estrutura a partir da rigidez de

9
cada pequeno elemento. Entretanto, este modelo não é adequado para os casos que possui uma
abordagem variacional: análise não-linear, eletromagnetismo, mecânica dos fluídos, dentre
outras.
As forças e deslocamentos presentes em cada um dos nós da estrutura discretizada são
dispostos em matrizes colunas, que tem por resultado após a aplicação de equações algébricas,
coeficientes que compõem a matriz de rigidez do elemento.
O método de elementos finitos baseia suas ações em três leis fundamentais, seja para
estruturas complexas bidimensionais ou tridimensionais, ou para estruturas reticuladas:
• equilíbrio de forças;
• compatibilidade de deslocamentos;
• lei do comportamento do material.
Entende-se Lei do comportamento do material como o fenômeno de variação das forças
internas do elemento proporcionalmente às deformações.
Segundo ALVES FILHO (2013), a grande tarefa da análise estrutural por elementos
finitos é determinar a relação entre as cargas que atuam nos nós da estrutura inteira e os
deslocamentos da estrutura inteira.
Estruturas bidimensionais ou tridimensionais apresentam vários graus de liberdade de
movimentação. Em uma matriz de rigidez de elementos, cada coeficiente representa a força
em um dos graus de liberdade, sendo causada devido ao deslocamento do nó em outro grau de
liberdade, todos os outros graus de liberdade não referentes ao coeficiente calculado no
momento são mantidos bloqueados. A determinação da força total atuante em um grau de
liberdade é feita através da consideração de todos os deslocamentos ocasionados por outros
graus de liberdade.
Para elementos unidimensionais, como as barras de treliça e as vigas a relação entre as
forças nodais e os deslocamentos nodais é direta. Isso é proporcionado pelo fato de a
deformação do elemento ser simples, assemelhando-se ao caso de uma mola, e também por os
elementos serem conectados somente pelos pontos nodais, não ocorrendo interação com
elementos vizinhos fora dessa posição.
Para a obtenção de resultados confiáveis em um estudo de elementos finitos torna-se
necessário seguir uma série de três diferentes etapas: o pré-processamento, o processamento e
o pós-processamento.
Na etapa de pré-processamento, ocorre à elaboração do problema estrutural a ser

10
estudado, seguido por um minucioso planejamento do modelo de elementos finitos a ser
utilizado para o estudo, ocorre então à elaboração da malha de elementos finitos. Com a
malha pronta deve-se informar ao programa todas as condições de contorno, restrições e
carregamentos á que o sistema estudado está sujeito. Nesta etapa também ocorre a
determinação da matriz de rigidez.
No processamento ocorre a solução das equações algébricas e diferenciais, referentes à
determinação dos deslocamentos nos nós.
No pós-processamento, o método de elementos finitos realiza os cálculos para
determinação das deformações, esforços e tensões, devido aos deslocamentos dos nós da
estrutura discretizada.
2.3 Substanciação teórica para definição do elemento usado nas simulações.
A escolha correta do elemento a ser adotado na discretização do modelo para é vital
para se alcançar os resultados desejados, pois devem ser atendidas, de modo mais fidedigno
possível, as necessidades e características físicas do objeto a ser simulado.
Neste estudo optou-se por considerar o chassi como composto por elementos
unidimensionais, tomando-se a hipótese de que o comprimento é bem maior que as dimensões
da seção transversal. A análise de vigas é um recurso bastante utilizado em problemas de
engenharia, tornando-se fundamental o estudo da formulação de viga, principalmente para a
otimização da estrutura proposta, pois exige menor capacidade computacional e consequente
redução no tempo de processamento.
As hipótese de vigas de Euler-Bernoulli e de Timoshenko são condições necessárias
para aplicação do modelo unidimensional, sendo assim caracterizadas:.
• Euler-Bernoulli: não são consideradas as deformações de cisalhamento presentes
nas seções transversais, bem como a inércia de rotação, que interferem nos
estudos dinâmicos para modos de altas frequências (FRÉJOU, 2014).
• Timoshenko: são considerados os efeitos do cisalhamento, além de serem mais
adequados quando se quer obter os modos de vibrar em frequências mais
elevadas, por considerar a inércia de rotação (FRÉJOU, 2014).
A hipótese do modelo de Euler-Bernoulli ou de flexão pura consiste em supor que ações

11
de movimento possíveis devem ser permanecerem planas, indeformadas e ortogonais ao eixo
longitudinal da viga.
Quando os efeito dos cisalhamento são importantes, emprega-se o modelo de viga de
Timoshenko. De forma análoga ao modelo de Euler, as ações de movimento possíveis na viga
de Timoshenko devem ser tais que as seções transversais permaneçam planas. No entanto, as
seções têm uma deformação angular e não permanecem ortogonais ao eixo de simetria da
viga. As diferenças das hipóteses de Euler e Timoshenko são ilustradas na Figura 7.
Neste trabalho foram adotadas as hipóteses associadas às vigas de Timoshenko, por
considerar, a princípois os efeitos do cisalhamento.
Figura 7 – Deformação da Viga de Timoshenko e de Euler-Bernoulli
2.4 Teoria de falhas para materiais dúcteis sob carregamento estático
Segundo NORTON (2013), o rompimento de materiais dúcteis ocorre quando o material
é submetido a tensões superiores ao seu limite de ruptura. Em muitas ocasiões a perda da
função de um determinado componente ou pode se dar quando este fica submetido a
deformações permanentes que ocorrem quando as tensões solicitantes se encontram acima do
limite de escoamento.
Algumas teorias foram formuladas para explicar esta ocorrência de falha em materiais
dúcteis, as mais consagradas e de uso disseminado são a teoria da energia de distorção,
também denominada Teoria de vonMises-Hencky, devido aos seus autores e a Teoria da
máxima tensão de cisalhamento, de Tresca. Essas teorias foram adotadas na analise das
simulações realizadas e que envolvem tensões decorrente de carregamentos combinados.

12
Para o caso bidimensional da teoria da energia de distorção, a tensão equivalente de vonMises ( σ ' ) é dada pela Equação 2.1
σ '=√σ1
2�σ1σ3�σ32
2.1 Sendo que σ1 e σ3 referem-se as tensões principais, e são dadas pela Equação 2.2
σ1=σ x+σ z
2+τmax
σ3=
σ x�σ z
2+τxy
2.2
A tensão máxima de cisalhamento ( τmax ) é dada pela Equação 2.3
τmax=√(σ x�σ z
2 )2
+τxz
2
2.3
E a tensão normal devido à flexão ( σx ) e a tensão de cisalhamento ( τxz ) devido à
torção em um ponto é dada pelas Equações 2.4a e 2.4b, respectivamente:
σ x=Mc
I
τxz=T r
J
2.4a
2.4b
O coeficiente de segurança (CSM) usado para a teoria da energia de distorção pode ser
encontrado usando a Equação 2.5:
CSM=σe
σ'
2.5
Onde σ e é a tensão normal de escoamento do material. No caso da teoria da máxima
tensão de cisalhamento, o coeficiente de segurança ( CST ) é dado pela Equação 2.6:
CST=0,50τe
τmax
2.6
Esses critérios serão utilizados para avaliar a segurança do projeto do chassi nos pontos
críticos calculados nas simulações.
2.5 A definição do modelo e da base física utilizada.
Após a malha de elementos finitos ter sido gerada, passou-se a construção do modelo
propriamente dito. Para isso deve-se ter em mente, que a construção de um modelo em
ambiente virtual consiste em prover as mesmas informações que seriam necessárias para a
construção e realização de um experimento real, ou seja, deve ser conhecido o material ou

13
materiais, as condições de contorno, detre outros aspectos.
Nesta etapa é feita a associação do(s) material(is) os elementos informando suas
propriedades necessárias para o tipo de teoria a ser empregada. Por se tratar de simulação
estática e dinâmica no âmbito da Mecânica dos Sólidos, são consideradas as seguintes
propriedades: Módulo de Elasticidade - E, coeficiente de Poison - ν , densidade - ρ .
O tipo de elemento a ser utilizado também é informado neste momento, sendo que neste
caso foi utilizado um elemento unidimensional de viga com formulação baseada nas hipóteses
de Timoshenko. Por se tratar de elemento de viga, as características de seção transversal
foram introduzidas.
Finalmente, para concluir as informações necessárias para a montagem do modelo,
foram informadas as condições de contorno existentes, quanto ao seu tipo e localização.
Para a obtenção dos resultados, deve-se informar ao 'solver' qual o método algébrico
mais indicado para representar o modelo real, E para o caso estudado, foram consideradas a
solução de problemas pertinentes a mecânica estática (MECA_STATIQUE), na avaliação dos
esforço e tensões e a solução de um problema dinâmico para cálculo dos autovalores e
autovetores. Em todas estas simulações foi assumida a hipótese de os fenômenos envolvidos
serem lineares.
Os resultados provenientes dos cálculos foram gravados na forma de tabela e também
com o enriquecimento da malha de elementos finitos, que nada mais é do que acrescentar às
grandezas topológicas existentes, os valores calculados, como por exemplo o campo de
deformações.
Estas informações são passadas a um código com sintaxe própria que indica as
características da estrutura à ser estudada, os métodos matemáticos que deverão ser utilizados
pelo programa, e as respostas que se espera retornar ao usuário. A elaboração deste código
pode ser realizada de duas formas, manualmente em qualquer editor de texto, ou com o
auxílio de um módulo denominado EFICAS. A programação neste ambiente facilita as ações
do usuário, reduzindo a possibilidade de que ocorram erros de sintaxe e também de enganos
quanto a nomes de comandos e funções, bem como sua correta utilização. No anexo C é
apresentado um exemplo do conjunto de instruções geradas.
Cada etapa da programação de processamento está ligada a uma ação desejada no
estudo, desde o fornecimento de valores e características, até comandos necessários, a fim de
que o solucionador disponha corretamente os resultados desejados.
14
2.6 A etapa de pós-processamento
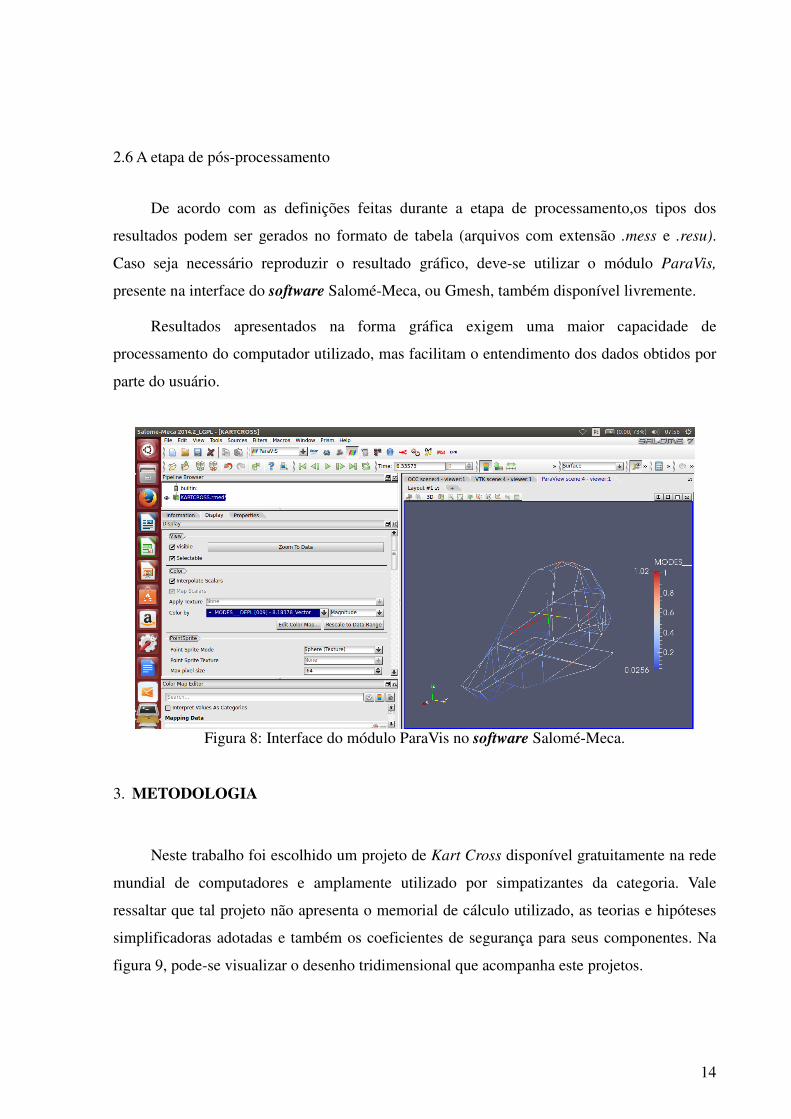
De acordo com as definições feitas durante a etapa de processamento,os tipos dos
resultados podem ser gerados no formato de tabela (arquivos com extensão .mess e .resu).
Caso seja necessário reproduzir o resultado gráfico, deve-se utilizar o módulo ParaVis,
presente na interface do software Salomé-Meca, ou Gmesh, também disponível livremente.
Resultados apresentados na forma gráfica exigem uma maior capacidade de
processamento do computador utilizado, mas facilitam o entendimento dos dados obtidos por
parte do usuário.
Figura 8: Interface do módulo ParaVis no software Salomé-Meca.
3. METODOLOGIA
Neste trabalho foi escolhido um projeto de Kart Cross disponível gratuitamente na rede
mundial de computadores e amplamente utilizado por simpatizantes da categoria. Vale
ressaltar que tal projeto não apresenta o memorial de cálculo utilizado, as teorias e hipóteses
simplificadoras adotadas e também os coeficientes de segurança para seus componentes. Na
figura 9, pode-se visualizar o desenho tridimensional que acompanha este projetos.

15
Figura 9 - Projeto Kart Cross obtido na internet (Beradero).
Para as simulações via MEF foi utilizada um softwares livres, em todas as etapas. O
ambiente integrado SALOMÉ-MECA, possui dentre vários módulos, um destinado a
definição da geometria, denominado SALOMÉ. Para a geração de malha neste ambiente
pode-se optar por diversos aplicativos dedicados, no pressente caso foi utilizado o gerador de
malhas NETGEN.
O processamento propriamente dito é feito com o solver de simulação multifísica
CODE-ASTER.
A partir deste projeto serão realizadas análises somente do chassi. Neste trabalho não
serão avaliados o estudo dos demais componentes do veículo, tais como os sistemas de:
direção, suspensão, motor, freios e transmissão.
O chassi foi modelado e discretizado com elementos de viga de Timoshenko, visando as
seguintes análises:
- Simulação considerando condições similares as adotadas quando da realização de
testes em ordem de marcha conforme regras da Confederação Brasileira de Automobilismo
(CBA);
- Simulação para o ensaio de torção segundo preconiza a regulamentação do INMETRO
para veículos com alterações estruturais;

16
- Avaliação das características dinâmicas do chassi pelo emprego de uma análise modal
via MEF.
Inicialmente foi avaliada a consistência das informações e medidas apresentadas no
projeto obtido na internet. Após isto, foi gerada a geometria para facilitar a compreensão dos
detalhes e das características construtivas. Esta etapa foi essencial para melhor compreensão e
posterior criação do modelo.
Na Figura 10 pode-se ver uma ilustração do modelo tridimensional do chassi.
Figura 10 – Modelo tridimensional do chassi.
A geometria da estrutura a ser simulada é apresentada na figura 11. Nesta geometria
considerou-se que as vigas se unem de maneira perfeitamente rígida, de modo que as
propriedades físicas das uniões seja constante e uniforme.

17
Figura 11- Vistas da geometria obtida utilizando o módulo GEOMETRY.
Em todas as simulações, para a geração das malhas foi utilizado o gerador NETGEN do
módulo MESH, resultando em uma discretização com 148 nós e 200 elementos SEG2.
Durante a geração da malha de elementos finitos foram criados grupos de nós, onde
serão aplicados os esforços concentrados, como os pesos do piloto, do tanque de combustível
e de líquido de arrefecimento e também os pontos de apoio da estrutura para as análises
estáticas e dinâmica. Estes grupos são importantes por permitir associar as características e/ou
condições de contorno conforme requer o problema a ser solucionado.
Na figura 12 pode ser observada a malha gerada e também os grupos de nós e linhas
criados.

18
Figura 12- Malha gerada no módulo MESH.
3.1 Modelagem utilizando vigas de Timoshenko
A estratégia de utilizar elementos de vigas foi anteriormente justificada e a
documentação disponibilizada pelo sítio do CODE-ASTER, reforça essa decisão.
Conforme o CODE-ASTER (2014), os modelos disponíveis no SALOME são indicados
para: elementos discretos (0D); vigas, barras e cabos (1D); tubos (1D); e placas e superfícies
(2D).
O modelo de Euler (POU_D_E*) é indicado para vigas longas, de alto índice de
esbeltez. Já o modelo de Timoshenko (POU_*_T*) é indicado para vigas retas ou curvas, e
curtas, ou seja, de baixo índice de esbeltez. Como dito anteriormente, e confirmado pela
documentação do CodeAster, o modelo a ser aplicado nas análises estruturais será o de
Timoshenko.
A documentação de referência: R3.08.01 - Elementos de Vigas, do CodeAster, apresenta
toda a formulação para aplicação dos modelos de Timoshenko e Euler-Bernoulli.

19
3.2 Unidades adotadas
Segundo NORTON (2013) alguns erros que ocorrem nas respostas obtidas para os
projetos de engenharia estão relacionados à seleção inadequada do sistema de unidades, ou até
mesmo nas conversões de unidades.
Nestas análises, a geometria do chassi foi desenvolvida considerando como unidade
fundamental de comprimento o milímetro (mm), de tempo o segundo (s), de massa o
quilograma (kg) e para os esforços o Newton (N). As unidades demais unidades derivadas a
partir desta escolha, foram determinadas observando-se a manutenção da coerência
dimensional. Como por exemplo, o módulo de elasticidade longitudinal, E [N/mm²]; o peso
específico, ρ [kg/mm³] e a aceleração [mm/s²].
4. SIMULAÇÕES E APRESENTAÇÃO DOS RESULTADOS
4.1 Simulação de ensaio em ordem de marcha
A primeira simulação realizada consistiu na análise das deformações elásticas geradas
no chassi pela ação de seu próprio peso, somando-se também o peso aproximado de uma
unidade motora e de um piloto. Todas essas massas geram cargas distribuídas, dispostas em
diferentes pontos do chassi, ocasionando tensões ao longo de toda a estrutura. Da resistência
dos materiais pode-se determinar as deformações ocasionadas em um corpo de acordo com as
tensões às quais o mesmo está submetido e o coeficiente elástico do material utilizado na
confecção do corpo. Tais tensões estão diretamente ligadas às forças ao longo de cada eixo de
coordenadas de cada barra da estrutura treliçada que constitui o chassi Spaceframe, momentos
fletores gerados pela ação das forças, e da área transversal do perfil da barra.
De acordo com BEER (1995), é importante evitar que as deformações se tornem tão
grandes a ponto de impedir que a estrutura venha a cumprir os fins aos quais estava destinada.
4.1.1 Simulação de ensaio em ordem de marcha para o projeto original
Na estrutura do projeto original, foi utilizado perfil tubular de diâmetro externo de 1”
(25,40 mm), com espessura da parede do tubo de 3,2 mm.

20
Foram adicionadas nessa estrutura cargas que simulavam o ponto de apoio e de fixação
de uma unidade motora de utilização motociclística com potência de 250 cilindradas,
conforme definido pela CBA, peso do motorista e do assento. Os parâmetros considerados
para essa análise estão apresentados na Tabela 1.
Tabela 1- Cargas usadas no ensaio de ordem de marcha – projeto original e projeto CBA Componente do veículo Massa (Kg) Peso (N)
Motorista + Assento 100 981
Motor 250 cc 42 412,02
Essas cargas foram responsáveis por ocasionar na estrutura do chassi em repouso, uma
deformação máxima de 2,66 mm em uma das barras, conforme ilustra a figura 13.
Figura 13: Deformação em ordem de marcha para estrutura original
O estudo também forneceu as tensões máximas ocasionadas na estrutura e suas
localizações. Tais dados foram utilizados para cálculo de coeficientes de segurança utilizando-
se as teorias de Tresca e Von Mises, conforme Tabela 2.

21
Tabela 2 – Esforços, Tensões e coeficientes de segurança obtidos para a simulação do ensaio de ordem de marcha - projeto original
Parâmetros Malha
M8 M100 M198 MT (N.mm) 6470,7 20275,7 2700,6
Máx[MFY;MFZ] (N.mm) 44050,6 21194,7 22749,4 σx (N/mm2) 39,9 19,2 20,6 τxy (N/mm2) 0,7 2,3 0,31 τmax (N/mm2) 19,9 9,864 10,298 σ1 (N/mm2) 39,9 19,5 20,6 σ3 (N/mm2) -0,01 -0,27 -0,004 σ'
(N/mm2) 39,9 19,6 20,6 CSM 5,3 10,7 10,2 CST 5,3 10,6 10,2
4.1.2 Simulação de ensaio em ordem de marcha – CBA
Para efeito de comparação, foram utilizados nas simulações medidas de perfil de
material, uma com as medidas originais do projeto e medidas de acordo com o requisito
mínimo especificado pela CBA para chassis de KartCross.
Nesta simulação foram utilizadas as dimensões das barras recomendadas visando
atender ao requisito mínimo especificado pela CBA para homologação de chassis de
KartCross para competição. Assim, o perfil tubular utilizado foi de diâmetro externo de 1 1/4”
(31,75 mm), com espessura da parede do tubo de 1,9 mm. Foram mantidas as mesmas cargas
referentes ao motor e ao motorista.
Nestas condições, essas cargas foram responsáveis por ocasionar na estrutura do chassi
em ordem de marcha, uma deformação máxima de 1,81 mm na barra responsável por
sustentar o peso do motorista e seu assento, conforme pode ser visualizado na figura 14.

22
Figura 14: Deformação em ordem de marcha para estrutura CBA.
As tensões máximas encontradas na estrutura e os cálculos de análise de falhas estão
apresentados na Tabela 3.
Tabela 3 – Esforços, tensões e coeficientes de segurança para a simulação do ensaio de ordem de marcha – projeto CBA
Parâmetros Malha
M78 M100 M198 MT (N.mm) 15317,87 20411,21 2557,92
Máx[MFY;MFZ] (N.mm) 41697,09 19988,18 20561,05 σx (N/mm2) 33,2 15,9 16,4 τxy (N/mm2) 0,7 0,97 0,12 τmax (N/mm2) 16,6 8,0 8,2 σ1 (N/mm2) 33,3 16,0 16,4 σ3 (N/mm2) -0,02 -0,06 -0,00091 σ'
(N/mm2) 33,3 16,0 16,4 CSM 6,3 13,1 12,8 CST 6,3 13,1 12,8
A partir da análise destes resultados, pode-se observar que o perfil indicado pelo CBA
apresentou melhores resultados em relação à deformação do chassi em ordem de marcha. Tal
diferença pode ser em razão do aumento da área circular de material responsável por suportar
as solicitações das forças geradas pelos carregamentos, ocasionando assim menores valores de

23
tensões ao longo das barras formadoras do SpaceFrame, e consequentemente, menores
deformações. A Tabela 4 resume estas diferenças.
Tabela 4 – Quadro resumo dos resultados obtidos para estrutura original e estrutura CBA
ESTRUTURA ORIGINAL
ESTRUTURA CBA
Raio externo (mm) 12,7 15,9
Raio interno (mm) 9,5 14,0
Espessura parede tubo (mm) 3,2 1,9
Momento de Inércia (mm4) 14.034,6 19925,2 Momento Polar de Inércia (mm4) 28.069,2 39.950,4
Material Aço SAE 1020 Aço SAE 1020
Barras mais solicitadas (malhas) 8, 100 e 98 78, 100 e 198
Menor CSM 5,3 (M8) 6,3 (M78) Menor CST 5,3 (M8) 6,3 (M78)
Deformação máxima encontrada (mm) 2,66 1,81
Este ensaio serviu como comprovação de que o chassi seria capaz de suportar seu
próprio peso em ordem de marcha sem que as deformações nas barras tubulares atingissem o
limite plástico do material, mantendo-se sempre no regime elástico, o chassi não sofrerá
deformações permanentes e terá sua integridade física mantida.

24
4.2 Simulação do ensaio de torção (INMETRO)
A Portaria n.º 30 de 22 de janeiro de 2004 do Ministério de Desenvolvimento, Indústria
e Comércio Exterior (MDIC) estabelece que as inspeções de segurança veicular, devem ser
realizadas conforme os requisitos estabelecidos nos Regulamentos Técnicos de Qualidade
(RTQ) do INMETRO.
A RTQ 24 Inspeção de veículos rodoviários automotores – modificação ou fabricação
artesanal estabelece os critérios mínimos a serem seguidos por Organismos de Inspeção
acreditados pelo INMETRO para inspeção de veículos rodoviários automotores modificados
ou fabricados artesanalmente. Entende-se por modificação todo o veículo que sofreu alteração
de suas características originais de fábrica, e por fabricação artesanal:
“Veículo projetado e fabricado sob a responsabilidade de pessoa física ou jurídica,
atendendo a todos os preceitos de construção veicular, de modo que o nome do primeiro proprietário sempre coincida com o nome do fabricante.” (MDIC, 2004).”
Para o caso de análise estrutural do chassi de um Kart Cross, o Regulamento citado
especifica os tipos de inspeções que devem ser realizadas nos elementos estruturais do
veículo: Inspeção Visual e Inspeção de Resistência Estrutural.
A inspeção visual tem como objetivo identificar, ao longo da extensão do
chassi/estrutura, a presença de fissuras, pontos de corrosão, deformações acentuadas,
dimensionamento inadequado e descontinuidades de uniões por solda. Sob esse aspecto, o
Regulamento é qualitativo, e não apresenta parâmetros físicos para reprovação.
No caso da inspeção da resistência estrutural, além de identificar fissuras,
descontinuidades de soldas, interferência com partes móveis, consiste em determinar, através
de medições feitas antes e depois do ensaio, se houve ou não deformações permanentes ou
residuais, ou seja, se as tensões combinadas nos pontos críticos ultrapassaram ou não o limite
de escoamento do material da estrutura. E de acordo com o Regulamento, o ensaio é realizado
da seguinte forma:
“[..] b) Carregar o veículo até atingir o seu Peso Bruto Total - PBT, através de lastros correspondentes aos pesos dos passageiros (70 kg/passageiro) e de sua carga útil; c) Suspender o veículo de modo que o mesmo fique apoiado em apenas 02 rodas, diagonalmente opostas. Os apoios devem ser colocados em linha diagonal ao veículo e as outras 02 rodas não devem estar apoiadas no solo;” (MDIC, 2004).”
A condição do ensaio de torção definida será simulada tornando livre os grupos de nós representativos das duas rodas não apoiadas. segunda parte da análise estática no SALOMÈ-

25
MECA e os resultados serão apresentados a seguir.
4.2.1 Ensaio de torção – Projeto original
Assim como na primeira parte da análise estática, os resultados obtidos com a
simulação do ensaio de torção do chassi nas condições do projeto original, serão comparados
com os resultados do ensaio com o dimensional da estrutura, em conformidade com os
parâmetros da CBA.
Na estrutura do projeto original, foi utilizado perfil tubular de diâmetro externo de 1”
(25,40 mm), com espessura da parede do tubo de 3,2 mm.
O resultado das deflexões na condição do ensaio de torção, ou seja, a estrutura elevada,
apoiada em apenas dois pontos da suspensão, diagonalmente opostos é apresentado na Figura
15.
Figura 15: Deflexões da Estrutura original.
A deflexão máxima obtida com a simulação do ensaio de torção foi de 39,4 mm. Além
da visualização das deflexões, o arquivo de resultados (Anexo A) apresentou as malhas onde
ocorreram os valores máximos de: Tensão Normal (N), Esforço Cortante em Y (VY), Esforço
Cortante em Z (VZ), Momento Torçor (MT), Momento de Flexão em Y (MFY) e Momento de

26
Flexão em Z (MFZ). Na tabela 5 são apresentados estes resultados associados as teorias de
falhas apresentadas no tópico 2.3.
Tabela 5 – Esforços, tensões e coeficientes de segurança obtidos na simulação do ensaio de torção para o projeto original
Malha M8 M25 M113 M114 M139 M140 MT (N.mm) 22305,9 27749,1 14957,5 25261,3 1263,5 45553,9
máx[MFY;MFZ] (N.mm) 132037,3 46873,0 116686,3 25620,8 44225,1 44262,1 σx (N/mm2) 119,48 42,42 105,59 23,18 40,02 40,05 τxy (N/mm2) 2,54 3,16 1,71 2,88 0,14 5,19 τmax (N/mm2) 59,79 21,44 52,82 11,94 20,01 20,69 σ1 (N/mm2) 119,54 42,65 105,62 23,54 40,02 40,72 σ3 (N/mm2) -0,05 -0,23 -0,03 -0,35 0,00 -0,66 σ'
(N/mm2) 119,56 42,77 105,63 23,71 40,02 41,05 CSM 1,76 4,9 2,0 8,9 5,2 5,1 CST 1,76 4,9 2,0 8,8 5,2 5,1
4.2.2 Ensaio de torção - CBA
Seguindo o Regulamento da CBA, o perfil tubular utilizado nas simulações foi de
diâmetro externo de 1 1/4” (31,75 mm), com espessura da parede do tubo de 1,9 mm. Assim
como na simulação anterior, o resultado das deflexões na condição do ensaio de torção, ou
seja, com a estrutura apoiada em apenas dois pontos diagonalmente opostos da suspensão são
apresentados na Figura 16.
Figura 16 - Deflexões da Estrutura CBA, Paravis do Salome. (Arquivo Pessoal)

27
A deflexão máxima obtida com a simulação do ensaio de torção foi de 24,2 mm.De
forma análoga, ou seja, utilizando os valores do arquivo de resultados (Anexo B), foram
determinado os coeficientes de segurança. Na tabela 6 são apresentados estes resultados
associados as teorias de falhas apresentadas no tópico 2.3.
Tabela 6 - Esforços, tensões e coeficientes de segurança obtidos na simulação do ensaio de torção para o projeto CBA
Malha M8 M25 M113 M114 M139 M140 MT (N.mm) 3930,0 26100,0 12100,0 22800,0 972,0 39300,0
máx[MFY;MFZ] (N.mm) 107000,0 41500,0 99400,0 21900,0 39700,0 35500,0 σx (N/mm2) 85,52 33,08 79,17 17,47 31,64 28,29 τxy (N/mm2) 0,19 1,24 0,58 1,09 0,05 1,87 τmax (N/mm2) 42,76 16,59 39,59 8,80 15,82 14,27 σ1 (N/mm2) 85,52 33,13 79,17 17,54 31,64 28,42 σ3 (N/mm2) 0,00 -0,05 0,00 -0,07 0,00 -0,12 σ'
(N/mm2) 85,52 33,15 79,18 17,58 31,64 28,48
CSM 2,5 6,3 2,7 12 6,6 7,4 CST 2,5 6,3 2,7 12 6,6 7,4
4.3 Análise modal com os dados do projeto original
Em um regime dinâmico, a estrutura veicular está sujeita a uma variedade de esforços e
impactos, que propiciam o surgimento de fenômenos de vibração. Casos esses valores de
frequência de excitação se aproximam dos valores das frequências naturais da estrutura,
surgem os fenômenos relacionados a ressonância e batimento. Os efeitos dessa superposição
podem evoluir para falha dos materiais que compõem a estrutura, propagação de
descontinuidades, diminuição da dirigibilidade e aumentos dos níveis de ruídos.
Além dos esforços externos a estrutura, alguns componentes mecânicos atuam como
uma fonte de excitação cíclica, sendo, em alguns casos, recomendados a instalação de coxins,
que atuam como elementos absorvedores de vibração, normalmente confeccionado em
material elastoméricos, usados em apoios do motor e nos elos da suspensão.
Em sistemas solicitados dinamicamente, com frequência haverá esforços vibratórios
sobrepostos aos esforços teóricos previstos pelas equações da dinâmica. Esses esforços
vibratórios podem ser decorrentes de várias causas. Se os elementos do sistema fossem
infinitamente rígidos, as vibrações poderiam ser eliminadas. Mas todos os elementos reais, de
qualquer material, possuem elasticidade e, portanto, comportam-se como molas quando

28
sujeitos a forças. As deformações resultantes podem gerar forças adicionais, originadas a
partir de forças inerciais associadas aos movimentos vibratórios dos elementos ou, se
existirem folgas na junção entre partes articuladas, solicitações de impacto durante as
vibrações (Norton, 2004)
Sendo assim, foi realizado uma simulação utilizando o MEF com a finalidade de
determinar os autovalores (frequências naturais da estrutura) e autovetores (modos de
vibração da estrutura). O conhecimento destes valores é de grande importância, pois pode
evitar que algum componente ligado à estrutura entre em ressonância.
Essa simulação considerou como fonte principal de excitação a unidade motora, na
faixa compreendida entre 3000 e 4000 RPM (Rotações Por Minuto), sendo equivalente a uma
banda de frequência variando entre 60 e 70 Hz, ou seja, os resultados das frequências naturais
e dos modos de vibras foram limitados por esta faixa de frequência. A figura 17 exemplifica
essa simulação.
Figura 17 - Modos de Vibração da estrutura CBA, Paravis do Salome.
Para que os resultados pudessem ser melhor visualizados, foi utilizado fator de escala
com aumento em 30 vezes, para tornar perceptível a deformação da estrutura. Este ensaio
possui um caráter mais didático e voltado para a apresentação dos esforços de vibração que a
estrutura poderia suportar teoricamente para a frequência de funcionamento do motor. No
entanto, em uma utilização normal, coxins e outros elementos de redução da
transmissibilidade de vibração para a estrutura serão utilizados, com a finalidade de
proporcionar maior comodidade ao condutor do veículo.

29
5. CONCLUSÕES E SUGESTÕES PARA TRABALHOS FUTUROS
Os ensaios realizados na estrutura em ordem de marcha, com a finalidade de evidenciar
os valores de deformação da estrutura quando exposta aos carregamentos estáticos, mostraram
que o chassi Spaceframe do KartCross não será submetido a deformações que atinjam a fase
plástica do material. Para as análises realizadas e as teorias de falhas adotadas, os coeficientes
de segurança encontrados ficaram em torno de 5.
A estrutura analisada conforme os critérios da CBA, apresentou menores deformações e
coeficientes de segurança mais conservativos. Considerando que as solicitações são as
mesmas para as duas situações, as respostas imediatas para o resultado são apresentadas a
seguir:
- espessura mínima determinada pela CBA ser maior que a especificada no projeto
original;
- Momento de Inércia e Momento Polar de Inércia da seção da CBA ser maior do que a
encontrada para as dimensões do projeto original, o que resulta em menores valores para os
esforços que a estrutura está submetida: a tensão normal devido à flexão ( σ x ) e a tensão de
cisalhamento ( τx ) devido à torção.
Os valores encontrados para os coeficientes de segurança confirmam o comportamento
da deflexão, para o caso do ensaio da CBA, que apresentaram menores deflexões. Os
coeficientes de segurança são mais conservativos em comparação com os do ensaio do projeto
original.
A partir da análise modal da estrutura, para valores de frequência entre 60 Hz e 70 Hz,
foi possível observar os respectivos modos de vibração do chassi. Nota-se que estes modos de
vibração excitam a estrutura de maneira não preocupante, sendo recomendável a utilização de
absorvedores de vibração nos apoios do motor, com a finalidade de amenizar os seus efeitos
sobre a estrutura, evitando a falha do material e a propagação de descontinuidades nas uniões.
Com base nos resultados obtidos, entende-se que o objetivo geral de analisar uma
estrutura veicular do tipo Spaceframe, utilizada em Kart Cross com auxílio de uma plataforma
de Elementos Finitos, e os objetivos específicos foram alcançados.
Uma grande vantagem de se utilizar um pacote de código aberto é a facilidade em
aplicar a metodologia de simulação em outros projetos estruturais, bastando apenas
desenvolver a geometria e aplicar os métodos de processamento e pós-processamento já

30
desenvolvidos neste trabalho.
E por se tratar de um código aberto, a linguagem utilizada no processamento permite
desenvolver interações com o objetivo de otimizar geometrias, aumentando o nível de
segurança do projeto e a eficiência da estrutura, com a redução de peso e custos com
aquisição de materiais e com os processos de fabricação.
O pacote de Elementos Finitos utilizado, SALOME-MECA, permite reproduzir diversas
situações da área da Engenharia Mecânica e isso possibilita deixar algumas sugestões para a
sequência de desenvolvimento da pesquisa em programas de pós-graduação, ou até mesmo
para futuros trabalhos, tais como:
- simulação de uma solicitação dinâmica de impacto na estrutura, reproduzindo um salto
sobre uma rampa;
- simulação de excitação harmônica, reproduzindo o deslocamento sobre um piso
irregular;
- ensaio de crash test (Teste de colisão);
- aplicação da metodologia utilizada para homologar um chassi de competição na CBA.

31
REFERÊNCIAS BIBLIOGRÁFICAS ALVES FILHO, A. Elementos Finitos - A base da tecnologia CAE. Editora Érica. 6° edição.
São Paulo. 2013.
BEER, F. P. JOHNSTON JR, E. R. Resistência dos Materiais. 3° ed. São Paulo. Editora
Pearson, 1995.
CBA. Copa Brasil de Velocidade na Terra: Categoria Mini-Fórmula Tubular –
Categorias “A” e “B”. Regulamento Técnico 2013. 2013.
CODE-ASTER. Overview on Estructural Elements. Disponível em: <http://www.code-
aster.org/V2/UPLOAD/DOC/Formations/08-structural-elements.pdf> Acessado em:
19/02/2015.
FLÉJOU, J. L. Éléments “exacts” de poutres (droitesetcurbes). Disponível em:
<http://www.code-aster.org/V2/doc/default/en/man_r/r3/r3.08.01.pdf> Acessado em:
19/02/2015.
MINISTÉRIO DO DESENVOLVIMENTO, INDÚSTRIA E COMÉRCIO EXTERIOR –
MDIC. RTQ 24 Inspeção de Veículos Rodoviários Automotores – Modificação ou
Fabricação Artesanal. Portaria n.º 30 de 22 de janeiro de 2004.
NORTON, R. L. Projeto de Máquinas: Uma abordagem integrada. 4 ed. Porto Alegre:
Bookman, 2013.
OLIVEIRA, F. C. G. Contribuição ao Desenvolvimento de uma Estrutura Veicular Tipo
Spaceframe Usando o Método de Elementos Finitos e Métodos Heurísticos de
Otimização Numérica. UFU: 2007.
RIBEIRO, W. A. Projeto GNU do cerrado Kart-Cross: Descrição, Ergonomia e Análise
estrutural. UNB: 2014.
SAE BRASIL. Regulamento Baja SAE Brasil. Jan, 2010.
TIMOSHENKO, S. P. Resistência dos Materiais. 3 ed. Rio de Janeiro: LTC, 1981.
Malha de Elementos Finitos de Uma Bomba. Disponível em:
<http://www.fem.unicamp.br/~em421/textos.htm>. Acessado em: 15/02/2015.

ANEXOS
ANEXO A
EXTRATO DO ARQUIVO *.RESU DO ENSAIO DE TORÇÃO PROJETO ORIGINAL --CODE_ASTER--VERSION:EXPLOITATION(stable)--
Version11.6.0modifiéele13/06/2014 révision0a66c5599959-branche'v11'
CopyrightEDFR&D1991-2015 Exécutiondu:TueJun923:00:382015
Nomdelamachine:faria-Satellite-P755 Architecture:64bit
Typedeprocesseur:x86_64 Systèmed'exploitation:Linux3.13.0-53-generic
Languedesmessages:pt(UTF-8) VersiondePython:2.7.3 VersiondeNumPy:1.7.1 ParallélismeMPI:inactif
ParallélismeOpenMP:actif Nombredeprocessusutilisés:1
VersiondelalibrairieHDF5:1.8.10 VersiondelalibrairieMED:3.0.7
VersiondelalibrairieMUMPS:4.10.0 VersiondelalibrairieSCOTCH:5.1.10
Mémoirelimitepourl'exécution:762.00Mo consomméeparl'initialisation:214.05Mo parlesobjetsdujeudecommandes:1.48Mo
restepourl'allocationdynamique:546.34Mo Taillelimitedesfichiersd'échange:48.00Go
ASTER 11.06.00 CONCEPT RESU CALCULE LE 09/06/2015 A 23:00:38 DE TYPE EVOL_ELAS CHAMP PAR ELEMENT AUX POINTS DE GAUSS DE NOM SYMBOLIQUEEFGE_ELGA NUMERO D'ORDRE: 1 INST: 0.00000000000000E+00 LA VALEUR MAXIMALE DE N EST2.09861106820253E+03 EN3 MAILLE(S) : M139 LA VALEUR MAXIMALE DE VY EST8.36889025702612E+02 EN 3 MAILLE(S) : M140 LA VALEUR MAXIMALE DE VZ EST1.08271514077066E+03 EN 3 MAILLE(S) : M114 LA VALEUR MAXIMALE DE MT EST2.77491108050061E+04 EN 3 MAILLE(S) : M25 LA VALEUR MAXIMALE DE MFY EST 1.32037299777949E+05 EN 1 MAILLE(S) : M8 LA VALEUR MAXIMALE DE MFZ EST 7.60468346200460E+04 EN 1 MAILLE(S) : M113

M8 N VY VZ MT MFY MFZ 1 -8.20346636903451E+025.56504576896703E+02 -1.83973914550143E+03 2.23058896410659E+041.32037299777949E+05 2.08525360113781E+04 2 -8.20346636903451E+025.56504576896703E+02 -1.83973914550143E+03 2.23058896410659E+04 1.70536031841106E+04 -1.39290000446658E+04 3 -8.20346636903451E+025.56504576896703E+02 -1.83973914550143E+03 2.23058896410659E+04 -9.7930093409727E+04 -4.87105361007098E+04 M25 N VY VZ MT MFY MFZ 1 -6.63487930477876E+02 -2.03818635733689E+02 -2.76000421693364E+02 2.77491108050061E+04 2.55808373526918E+04 -4.68729605955530E+04 2 -6.63487930477876E+02 -2.03818635733689E+02 -2.76000421693364E+02 2.77491108050061E+04 -5.99187766616995E+03 -2.35573886044987E+04 3 -6.63487930477876E+02 -2.03818635733689E+02 -2.76000421693364E+02 2.77491108050061E+04 -3.75645926850317E+04 -2.41816613444418E+02 M113 N VY VZ MT MFY MFZ 1 -2.10498253945632E+03 -1.22882166832100E+03 -1.37051011727530E+02 1.49574817705133E+04 3.63016641041101E+03 -1.16686313116314E+05 2 -2.10498253945632E+03 -1.22882166832100E+03 -1.37051011727530E+02 1.49574817705133E+04 -7.1176392198348E+03 -2.03197392481341E+04 3 -2.10498253945632E+03 -1.22882166832100E+03 -1.37051011727530E+02 1.49574817705133E+04 -1.7865444850080E+04 7.60468346200460E+04 M114 N VY VZ MT MFY MFZ 16.42375775749795E+02 -4.97687589640309E+01 1.08271514077066E+03 2.52612667160041E+04 -1.9853235177855E+04 1.64681476186288E+03 26.42375775749795E+02 -4.97687589640309E+01 1.08271514077066E+03 2.52612667160041E+04 2.88378277832907E+03 2.69195870010752E+03 36.42375775749795E+02 -4.97687589640309E+01 1.08271514077066E+03 2.52612667160041E+04 2.56208007345134E+04 3.73710263835215E+03 M139 N VY VZ MT MFY MFZ 12.09861106820253E+03 1.29922367494227E+02 1.49643794579065E+02 1.26353642369517E+03 2.58185763514438E+03 -7.42926637977657E+03 22.09861106820253E+03 1.29922367494227E+02 1.49643794579065E+02 1.26353642369517E+03 2.34034600984106E+04 -2.55068077483358E+04 32.09861106820253E+03 1.29922367494227E+02 1.49643794579065E+02 1.26353642369517E+03 4.42250625616768E+04 -4.35843491168950E+04 M140 N VY VZ MT MFY MFZ 11.22950888061523E+03 8.36889025702612E+02 -9.36929066478682E+02 -4.5553922853946E+04 -4.4260987426757E+04 -9.14041641807556E+03 21.22950888061523E+03 8.36889025702612E+02 -9.36929066478682E+02 -4.5553922853946E+04 -4.4261538589477E+04 -9.14090870594978E+03 31.22950888061523E+03 8.36889025702612E+02 -9.36929066478682E+02 -4.5553922853946E+04 -4.4262089752197E+04 -9.14140099382401E+03

ANEXO B EXTRATO DO ARQUIVO *.RESU DO ENSAIO DE TORÇÃO CBA
--CODE_ASTER--VERSION:EXPLOITATION(stable)-- Version11.6.0modifiéele13/06/2014 révision0a66c5599959-branche'v11'
CopyrightEDFR&D1991-2015 Exécutiondu:TueJun210:30:342015
Nomdelamachine:faria-Satellite-P755 Architecture:64bit
Typedeprocesseur:x86_64 Systèmed'exploitation:Linux3.13.0-45-generic
Languedesmessages:pt(UTF-8) VersiondePython:2.7.3 VersiondeNumPy:1.7.1 ParallélismeMPI:inactif
ParallélismeOpenMP:actif Nombredeprocessusutilisés:1
VersiondelalibrairieHDF5:1.8.10 VersiondelalibrairieMED:3.0.7
VersiondelalibrairieMUMPS:4.10.0 VersiondelalibrairieSCOTCH:5.1.10
Mémoirelimitepourl'exécution:762.00Mo consomméeparl'initialisation:214.05Mo parlesobjetsdujeudecommandes:1.48Mo
restepourl'allocationdynamique:546.34Mo Taillelimitedesfichiersd'échange:48.00Go
ASTER11.06.00CONCEPTRESUCALCULELE02/06/2015A10:30:34DETYPEEVOL_ELAS CHAMPPARELEMENTAUXPOINTSDEGAUSSDENOMSYMBOLIQUEEFGE_ELGA NUMEROD'ORDRE:1INST:0.00000000000000E+00 LAVALEURMAXIMALEDEN EST 1.67708318206956E+03 EN3MAILLE(S):M139 LAVALEURMAXIMALEDEVY EST 7.04618886895738E+02 EN3MAILLE(S):M140 LAVALEURMAXIMALEDEVZ EST 8.42414706050127E+02 EN3MAILLE(S):M114 LAVALEURMAXIMALEDEMT EST 2.60569758894498E+04 EN3MAILLE(S):M25 LAVALEURMAXIMALEDEMFY EST 1.21965670829006E+05 EN1MAILLE(S):M8 LAVALEURMAXIMALEDEMFZ EST 6.07986454901840E+04 EN1MAILLE(S):M113
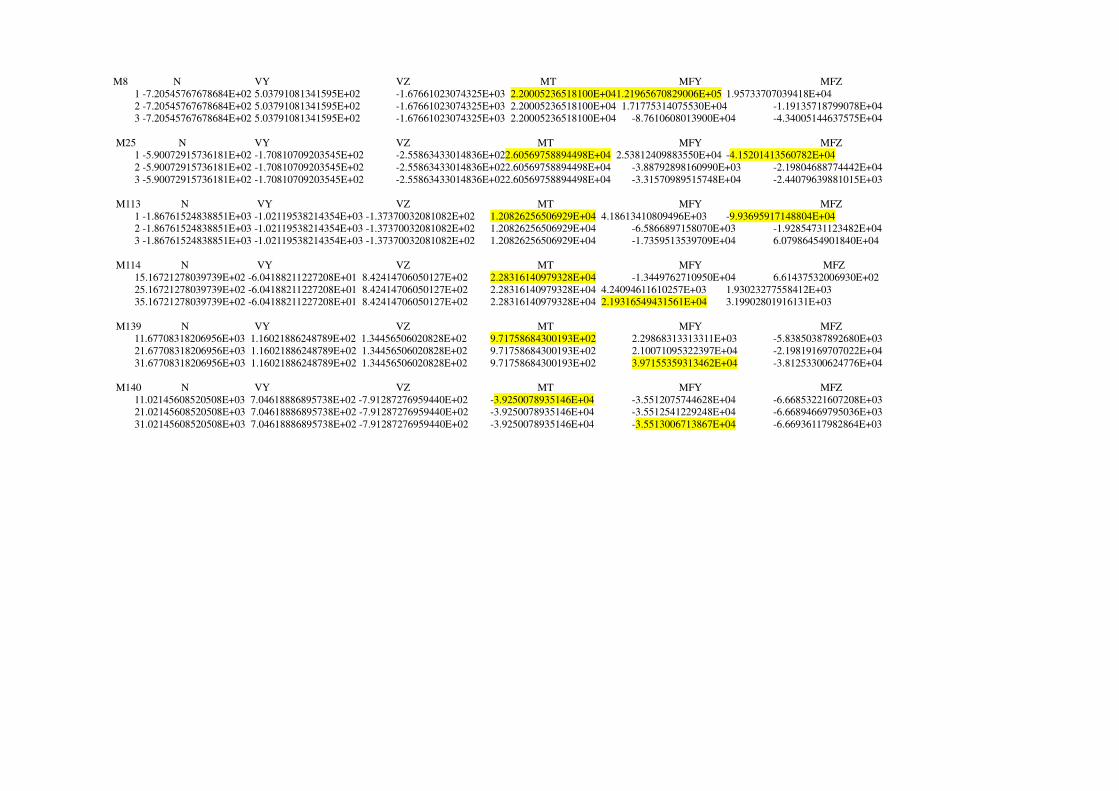
M8 N VY VZ MT MFY MFZ 1 -7.20545767678684E+02 5.03791081341595E+02 -1.67661023074325E+03 2.20005236518100E+041.21965670829006E+05 1.95733707039418E+04 2 -7.20545767678684E+02 5.03791081341595E+02 -1.67661023074325E+03 2.20005236518100E+04 1.71775314075530E+04 -1.19135718799078E+04 3 -7.20545767678684E+02 5.03791081341595E+02 -1.67661023074325E+03 2.20005236518100E+04 -8.7610608013900E+04 -4.34005144637575E+04 M25 N VY VZ MT MFY MFZ 1 -5.90072915736181E+02 -1.70810709203545E+02 -2.55863433014836E+022.60569758894498E+04 2.53812409883550E+04 -4.15201413560782E+04 2 -5.90072915736181E+02 -1.70810709203545E+02 -2.55863433014836E+022.60569758894498E+04 -3.88792898160990E+03 -2.19804688774442E+04 3 -5.90072915736181E+02 -1.70810709203545E+02 -2.55863433014836E+022.60569758894498E+04 -3.31570989515748E+04 -2.44079639881015E+03 M113 N VY VZ MT MFY MFZ 1 -1.86761524838851E+03 -1.02119538214354E+03 -1.37370032081082E+02 1.20826256506929E+04 4.18613410809496E+03 -9.93695917148804E+04 2 -1.86761524838851E+03 -1.02119538214354E+03 -1.37370032081082E+02 1.20826256506929E+04 -6.5866897158070E+03 -1.92854731123482E+04 3 -1.86761524838851E+03 -1.02119538214354E+03 -1.37370032081082E+02 1.20826256506929E+04 -1.7359513539709E+04 6.07986454901840E+04 M114 N VY VZ MT MFY MFZ 15.16721278039739E+02 -6.04188211227208E+01 8.42414706050127E+02 2.28316140979328E+04 -1.3449762710950E+04 6.61437532006930E+02 25.16721278039739E+02 -6.04188211227208E+01 8.42414706050127E+02 2.28316140979328E+04 4.24094611610257E+03 1.93023277558412E+03 35.16721278039739E+02 -6.04188211227208E+01 8.42414706050127E+02 2.28316140979328E+04 2.19316549431561E+04 3.19902801916131E+03 M139 N VY VZ MT MFY MFZ 11.67708318206956E+03 1.16021886248789E+02 1.34456506020828E+02 9.71758684300193E+02 2.29868313313311E+03 -5.83850387892680E+03 21.67708318206956E+03 1.16021886248789E+02 1.34456506020828E+02 9.71758684300193E+02 2.10071095322397E+04 -2.19819169707022E+04 31.67708318206956E+03 1.16021886248789E+02 1.34456506020828E+02 9.71758684300193E+02 3.97155359313462E+04 -3.81253300624776E+04 M140 N VY VZ MT MFY MFZ 11.02145608520508E+03 7.04618886895738E+02 -7.91287276959440E+02 -3.9250078935146E+04 -3.5512075744628E+04 -6.66853221607208E+03 21.02145608520508E+03 7.04618886895738E+02 -7.91287276959440E+02 -3.9250078935146E+04 -3.5512541229248E+04 -6.66894669795036E+03 31.02145608520508E+03 7.04618886895738E+02 -7.91287276959440E+02 -3.9250078935146E+04 -3.5513006713867E+04 -6.66936117982864E+03

ANEXO C
Estrutura dos comandos para execução no CODE-ASTER
DEBUT();
Sintaxe com a função de inicializar a programação.
MALHA=LIRE_MAILLAGE(FORMAT='MED',);
Indica o formato que a malha foi exportada,possibilitando que o software leia as informações desta malha.
ACO=DEFI_MATERIAU(ELAS=_F(E=210000.0,
NU=0.3,
RHO=7.86e-06,),);
Define as características do material da estrutura.
MATE1=AFFE_MATERIAU(MAILLAGE=MALHA,
AFFE=_F(TOUT='OUI',
MATER=ACO,),);
Atribui o material à malha
MODE=AFFE_MODELE(MAILLAGE=MALHA,
AFFE=_F(TOUT='OUI',
PHENOMENE='MECANIQUE',
MODELISATION='POU_D_T',),);
Atribui o modelo estático de mecânica dos sólidos à malha, utilizando modelagem de vigas de Timoshenko
CAREL=AFFE_CARA_ELEM(MODELE=MODE,
POUTRE=_F(GROUP_MA='MALHAVIGAS',
SECTION='CERCLE',
CARA=('R','EP',),
VALE=(15.875,1.9,),),);
Adiciona à malha as características geométricas da seção
PESO=AFFE_CHAR_MECA(MODELE=MODE,
PESANTEUR=_F(GRAVITE=9.81,
DIRECTION=(0.0,-1.0,0.0,),),);
Atribui o campo gravitacional na modelagem.
CHAR=AFFE_CHAR_MECA(MODELE=MODE,
DDL_IMPO=_F(GROUP_NO=('SUTREI','SUDIDI',),
DX=0.0,
DY=0.0,
DZ=0.0,),
FORCE_NODALE=(_F(GROUP_NO='MOTORCIMA',
FZ=-206.01,),
_F(GROUP_NO='MOTORISTA',
FZ=-490.5,),
_F(GROUP_NO='MOTORBAIXO',
FZ=-206.01,),),);
Define as restrições de movimento (engaste) e demais carregamentos (peso de ordem de marcha)nos grupos de nós
RESU=MECA_STATIQUE(MODELE=MODE,
CHAM_MATER=MATE1,
CARA_ELEM=CAREL,
EXCIT=(_F(CHARGE=CHAR,),
_F(CHARGE=PESO,),),);
RESU=CALC_CHAMP(reuse =RESU,
RESULTAT=RESU,
CONTRAINTE=('EFGE_ELGA','SIEF_ELGA',),); Determina os cálculos a serem realizados, atribuindo os parâmetros e métodos necessários para a obtenção dos resultados .
IMPR_RESU(FORMAT='RESULTAT',
RESU=_F(RESULTAT=RESU,
NOM_CHAM=('EFGE_ELGA','SIEF_ELGA','DEPL',),),); Define as formas de apresentação dos resultados no pós-processamento
FIN(); Fim da programação.