UNIVERSIDADE DE LISBOA INSTITUTO DE EDUCAÇÃO DA...
100
UNIVERSIDADE DE LISBOA INSTITUTO DE EDUCAÇÃO DA UNIVERSIDADE DE LISBOA RELATÓRIO DA PRÁTICA DE ENSINO SUPERVISIONADA ROBÓTICA EDUCATIVA NO ENSINO DE SUBPROGRAMAS Fábio Manuel Serôdio Pereira Delgado Varanda CICLO DE ESTUDOS CONDUCENTE AO GRAU DE MESTRE EM ENSINO DE INFORMÁTICA 2012
Transcript of UNIVERSIDADE DE LISBOA INSTITUTO DE EDUCAÇÃO DA...

UNIVERSIDADE DE LISBOA
INSTITUTO DE EDUCAÇÃO DA UNIVERSIDADE DE LISBOA
RELATÓRIO DA PRÁTICA DE ENSINO SUPERVISIONADA
ROBÓTICA EDUCATIVA NO ENSINO DE SUBPROGRAMAS
Fábio Manuel Serôdio Pereira Delgado Varanda
CICLO DE ESTUDOS CONDUCENTE AO GRAU DE MESTRE
EM ENSINO DE INFORMÁTICA
2012

UNIVERSIDADE DE LISBOA
INSTITUTO DE EDUCAÇÃO DA UNIVERSIDADE DE LISBOA
RELATÓRIO DA PRÁTICA DE ENSINO SUPERVISIONADA
ROBÓTICA EDUCATIVA NO ENSINO DE SUBPROGRAMAS
Fábio Manuel Serôdio Pereira Delgado Varanda
CICLO DE ESTUDOS CONDUCENTE AO GRAU DE MESTRE
EM ENSINO DE INFORMÁTICA
Trabalho orientado pelo Professor Doutor Pedro Rocha Reis
2012


i
Ao orientar os alunos a
utilizarem as diversas ferramentas,
o professor está a contribuir para o
desenvolvimento e preparação de
cidadãos aptos para a sociedade da
informação e do conhecimento
(Carvalho, 2007)

ii

iii
AGRADECIMENTOS
A realização deste relatório é o fruto de uma longa aprendizagem e de um
trabalho árduo. A sua concretização envolveu uma série de individualidades às
quais não poderei deixar de agradecer.
À Professora Paula Abrantes pela forma como me entusiasmou e motivou
ao longo destes dois anos e que apesar do seu horário ocupado, sempre
demonstrou total disponibilidade, apoio e confiança.
Ao meu orientador, Professor Doutor Pedro Rocha Reis, pelo seu caráter
prestável ao longo de todas as etapas da prática de ensino supervisionada.
Ao Professor Doutor Fernando Albuquerque Costa, pelo seu auxílio e
recetividade.
À escola profissional Bento de Jesus Caraça, que me proporcionou todas as
condições para a frequência do Mestrado e, em especial, ao diretor Pedro Leite da
Silva. Aos meus colegas professores pela compreensão e apoio. Aos meus alunos
que fazem com que diariamente seja possível manter o espírito crítico e a dinâmica
em aula.
Aos colegas de Mestrado, pela simpatia, discussão e colaboração.
Ao colega Henrique Correia pela disponibilidade demonstrada durante a
intervenção.
À escola secundária D. Pedro V, mais especificamente ao professor
Alexandre Rodrigues, pela abertura e receção da sua sala de aula e aos seus
alunos que se dispuseram a colaborar, possibilitando o sucesso da intervenção.
À minha família; Mãe, Pai, Irmã, Avó, Tios e aos Amigos por acreditarem
sempre que esta etapa estava conseguida e por estarem sempre presentes.
À minha namorada, Ana Rita Pires, pelo seu contínuo apoio e
disponibilidade e por me ter possibilitado a estabilidade necessária à frequência do
Mestrado, acreditando sempre no meu esforço e empenho.
Ao Mauro e à Sandra, pela amizade.
Para terminar, agradecer a todos aqueles que não referi mas que estiveram
presentes.
A todos Muito Obrigado.

iv

v
RESUMO
A prática de ensino supervisionada decorreu na Escola Secundária D. Pedro
V, numa turma de 10º ano do curso profissional de Gestão e Programação de
Sistemas Informáticos, disciplina de Programação e Sistemas de Informação, no
módulo de Estruturas de Dados Estáticas.
O módulo tem como objetivo dar uma visão global da estruturação de
programas, compreendendo que a utilização de subprogramas possibilita a
reutilização de código.
A Robótica Educativa (RE) pode ser definida como a exploração de um
ambiente cujos componentes proporcionam a construção e programação de
dispositivos automatizados com o objetivo de explorar conceitos das diversas áreas
do conhecimento (Ribeiro, Coutinho e Costa, 2009). A RE pode ser uma forte aliada
para motivar os alunos face a um leque de potencialidades e inúmeros benefícios.
Durante a intervenção os alunos trabalharam em grupo de quatro
elementos, utilizando a metodologia Problem Based Learning. O problema em
causa tinha que ver com o estacionamento autónomo de um carro (robô) num
parque de estacionamento, que os alunos ultrapassaram resolvendo desafios
(subprogramas) de dificuldade crescente.
Para além de testar a metodologia apresentada com os alunos, propus-me a
investigar sobre as potencialidades e limitações da utilização de robôs no ensino
específico dos subprogramas.
Por forma a avaliar os alunos, as estratégias e a responder à questão de
investigação foram desenvolvidas três grelhas de avaliação e um questionário.
Os resultados atingidos pelos alunos foram muito bons e a análise ao
questionário permitiu concluir que o trabalho foi esclarecedor e motivador,
apresentando os robôs como um recurso lúdico que torna as aulas interessantes e
que, graças à linguagem por blocos, apresenta uma menor complexidade.
Palavras-chave: Programação, Estruturas de Dados Estáticas, Robótica Educativa
e Problem Based Learning.

vi

vii
ABSTRACT
The supervised teaching practice took place in the Secondary School D.
Pedro V, in a first-year class of the professional Management and Programming
Computer Systems course, involving Programming and Information Systems, which
is part of the Static Data Structures module.
This module aims to give an overview of the structure of programs, including
the use of subprograms, which enables the reuse of programming code.
Robotics in Education (RE) can be defined as the exploration of an
environment whose components enable the construction and programming of
automated devices in order to explore concepts from different areas of knowledge
(Ribeiro and Costa Coutinho, 2009). RE can be of great help in motivating students,
as it has a range of capabilities, and numerous benefits.
During the session the students worked in groups of four, using Problem
Based Learning methodology. The problem to be solved involved the programming
of a car (robot) to park automatically in a parking space. To achieve this, the
students had to solve challenges (subprograms) of increasing difficulty.
In addition to testing the proposed methodology with students, I set myself
the task of investigating the potential, and limitations of the use of robots in teaching
specific subprograms.
Three evaluation grids and a questionnaire were designed in order to assess
the students, the strategies they used, and the overall answer to the research
question.
The results achieved by the pupils were very good and the questionnaire
analysis showed that the work was enlightening and motivating. It also showed that
using robots as a recreational resource makes lessons interesting and, thanks to the
modular nature of the language used, has a lower complexity.
Keywords: Computer Programming, Static Data Structures, Robots in Education e Problem Based Learning.

viii
ix
ÍNDICE
Agradecimentos ....................................................................................................................... iii
Resumo .....................................................................................................................................v
Abstract ................................................................................................................................... vii
Índice ........................................................................................................................................ ix
Índice de tabelas ...................................................................................................................... xi
Índice de Ilustrações ............................................................................................................... xii
Introdução ................................................................................................................................ 1
Local de Intervenção ................................................................................................................ 3
Caracterização da escola ..................................................................................................... 3
Identificação e caracterização da turma .............................................................................. 4
Unidade didática ...................................................................................................................... 9
Curso .................................................................................................................................... 9
Disciplina ............................................................................................................................ 10
Módulo ................................................................................................................................ 12
Conteúdos .......................................................................................................................... 12
Opiniões de profissionais ................................................................................................... 13
Problematização .................................................................................................................... 15
O que é programar? ........................................................................................................... 15
A importância da programação .......................................................................................... 15
É difícil? Porquê? ............................................................................................................... 16
Porque é que os alunos têm insucesso? ........................................................................... 16
Solução? ............................................................................................................................ 17
Robótica Educativa ......................................................................................................... 17
Caráter investigativo .......................................................................................................... 19
Plano de intervenção ............................................................................................................. 21
Princípios pedagógicos da ação ........................................................................................ 21
Fundamentação e enquadramento conceptual ................................................................. 21
Programar o robô ............................................................................................................... 23
Blocos utilizados ............................................................................................................. 24
Estratégias de intervenção e de avaliação das aprendizagens......................................... 28
Plano de atuação ............................................................................................................... 29
Descrição de objetivos específicos .................................................................................... 30
Recursos utilizados ............................................................................................................ 42
Explicitação do plano de atividades e calendarização ...................................................... 42
Avaliação da intervenção ....................................................................................................... 45
A Intervenção ......................................................................................................................... 47
As sessões ......................................................................................................................... 47

x
Avaliação ......................................................................................................................... 52
Análise das respostas ao inquérito ................................................................................. 55
Reflexão.................................................................................................................................. 61
Anexo A – Módulos de caráter obrigatório ............................................................................. 65
Anexo B – Módulos de caráter opcional ................................................................................. 66
Anexo C – Mapa conceptual com os conteúdos dos módulos a lecionar no primeiro ano ... 67
Anexo D – Cenário Parking Space ......................................................................................... 69
Anexo E – Enunciado de exercício de diagnóstico ................................................................ 71
Anexo I – Grelha de avaliação individual das partilhas na plataforma .................................. 77
Anexo J – Grelha de avaliação da apresentação .................................................................. 78
Anexo K – Grelha de avaliação individual na apresentação .................................................. 79
Anexo L – Questionário .......................................................................................................... 80
Referências ............................................................................................................................ 81

xi
ÍNDICE DE TABELAS
Tabela 1 – Matriz de especificação da primeira sessão ........................................................ 32
Tabela 2 – Matriz de especificação da segunda sessão ...................................................... 33
Tabela 3 – Matriz de especificação da terceira sessão ........................................................ 34
Tabela 4 – Matriz de especificação da quarta sessão .......................................................... 34
Tabela 5 – Matriz de especificação da quinta sessão .......................................................... 35
Tabela 6 – Plano de sessão n.º 1 .......................................................................................... 37
Tabela 7 – Plano de sessão n.º 2 .......................................................................................... 38
Tabela 8 – Plano de sessão n.º 3 ......................................................................................... 39
Tabela 9 – Plano de sessão n.º 4 ......................................................................................... 40
Tabela 10 – Plano de sessão n.º 5 ....................................................................................... 41
Tabela 11 – Cronograma de atividades ................................................................................. 42
Tabela 12 – Avaliações da grelha de registo de aula ............................................................ 52
Tabela 13 – Resultados da grelha de avaliação das partilhas na plataforma ....................... 53
Tabela 14 – Resultados da grelha de avaliação individual das partilhas na plataforma ....... 53
Tabela 15 – Resultados da grelha de avaliação da apresentação ........................................ 54
Tabela 16 – Resultados da grelha de avaliação individual da apresentação ........................ 54
Tabela 17 – Desafios em que os alunos sentiram mais dificuldades .................................... 55
Tabela 18 – Desafios em que os alunos sentiram menos dificuldades ................................. 55
Tabela 19 – Potencialidades da utilização de robôs na aprendizagem de subprogramas .. 56
Tabela 20 – Limitações da utilização de robôs na aprendizagem de subprogramas ........... 57
Tabela 21 – Importância do facebook como plataforma de partilha de informações na resolução do problema ........................................................................................................... 57
Tabela 22 – Justificações para a importância do facebook na resolução do problema ........ 58
Tabela 23 – Pertinência do facebook ou outra plataforma online para partilha de informações e questões das aulas ........................................................................................ 58
Tabela 24 – Justificações para a pertinência do facebook ou outra plataforma online na partilha de informações e questões das aulas....................................................................... 58
xii
ÍNDICE DE ILUSTRAÇÕES
Ilustração 1 – Ciclo em NXT-G ............................................................................................... 23
Ilustração 2 – Ciclo em C# ..................................................................................................... 23
Ilustração 3 – Bloco Random ................................................................................................. 24
Ilustração 4 – Bloco Constant ................................................................................................ 24
Ilustração 5 – Bloco Move ...................................................................................................... 25
Ilustração 6 – Bloco Loop ....................................................................................................... 25
Ilustração 7 – Bloco Loop com sensor de luz......................................................................... 26
Ilustração 8 - If ........................................................................................................................ 26
Ilustração 9 - Switch ............................................................................................................... 27
Ilustração 10 – Bloco Wait ...................................................................................................... 27
Ilustração 11 – Algoritmo do subprograma 1 ......................................................................... 47
Ilustração 12 – Algoritmo 1 do subprograma 5 ...................................................................... 50
Ilustração 13 – Algoritmo 2 do subprograma 5 ...................................................................... 50
Ilustração 14 – Utilização de subprogramas .......................................................................... 56
Ilustração 15 – Exemplo de array aplicado ao mundo real .................................................... 56
1
INTRODUÇÃO
O ensino surgiu em Fevereiro de 2008 de uma forma quase casual e, tal
como referi na carta de apresentação da candidatura para o Mestrado,
rapidamente concluí que esta é uma área para a qual me sinto vocacionado. A
frequência do curso tem-me possibilitado o potenciar de conhecimentos tornando a
minha função mais sólida.
O presente relatório surge no âmbito do Mestrado em Ensino da Informática,
o qual, de acordo com a portaria n.º 1189/2010, proporciona a habilitação
profissional para a docência para o grupo 550, ou seja, o domínio da habilitação
para a docência de informática e, tal como vem referido no capítulo 2, artigo 3º do
Decreto-Lei n.º 43/2007 “A habilitação profissional para a docência num
determinado domínio é condição indispensável para o desempenho da atividade
docente nas áreas curriculares ou disciplinas por ele abrangidos”.
A prática de ensino supervisionada é parte integrante do Mestrado e, de
acordo com o Decreto-Lei n.º 43/2007, é um momento de aprendizagem da
mobilização de conhecimentos, capacidades, competências e atitudes, em
contexto real.
A intervenção decorreu na Escola Secundária D. Pedro V, numa turma de
10º ano do curso profissional de Gestão e Programação de Sistemas Informáticos,
disciplina de Programação e Sistemas de Informação, no módulo de Estruturas de
Dados Estáticas. Foram lecionadas cinco sessões de 90 minutos em que, de
acordo com as especificidades de uma profissão que exige uma atualização
constante e um trabalho que nunca está terminado, pretende-se contextualizar,
elucidar e discutir os conceitos de planificação e avaliação, bem como aprimorar
práticas pedagógicas e estratégias de ensino. Por fim, como a informática é
sinónimo de novidade, a promoção de uma pedagogia inovadora é o objetivo final,
contribuindo para o processo de construção de conhecimento do aluno (Valente,
1999, citado por Faria, 2006).
A robótica tem vindo a afirmar-se como uma ferramenta pedagógica
extremamente útil ao nível da educação científica e tecnológica (Ribeiro, Coutinho
e Costa, 2007). Neste contexto, pensou-se num projeto que envolve a
programação de robôs Lego Mindstorms como consolidação de conhecimentos
sobre subprogramas.
Propus-me então investigar sobre as potencialidades e limitações da
robótica educativa no ensino dos subprogramas.

2
Deste relatório consta uma descrição da escola e do contexto em que esta
se insere. O curso, disciplina e módulo são apresentados e apreciados por
profissionais da área. A problemática levantada pela “arte” de programar é também
referida, sendo proposta uma possível solução para se ensinar a aprender a
programar. É apresentado o plano de intervenção, expondo as estratégias e seus
objetivos, recursos e atividades. É explicada a forma como a intervenção foi
avaliada, a intervenção em si, as sessões, a avaliação e por fim é feita uma
reflexão sobre a prática e sobre a problemática que foi alvo de investigação.

3
LOCAL DE INTERVENÇÃO
CARACTERIZAÇÃO DA ESCOLA
O Liceu Nacional D. Pedro V foi inaugurado no ano letivo 1969/1970,
através do Plano de Construções Escolares. Deve o seu nome ao Rei D. Pedro V,
filho da Rainha D. Maria II, conhecida pelo cognome de “A Educadora”.
Foi o primeiro liceu de Lisboa a introduzir o modelo pedagógico de ensino
misto.
Hoje é conhecida por Escola Secundária D. Pedro V, e no ano letivo de
2008/2009 foi requalificada (1ª fase), através do Programa de Modernização de
Escolas Secundárias, sendo agora constituída por cinco pavilhões distribuídos por
uma área de 7624,4m2, com 29 salas de aula, 4 salas de artes, 4 salas TIC, um
estúdio Multimédia, uma sala de educação especial, laboratórios, um pavilhão
gimnodesportivo, um polivalente, vestiários, gabinetes para o Centro de Novas
Oportunidades (C.N.O.), acessos para deficientes, posto médico, gabinetes de
psicologia e ação social, uma sala de exposições, uma biblioteca, associação de
estudantes e de pais, um bar, um refeitório, uma copa, salas e gabinetes para a
secretaria, professores e direção.
No que diz respeito a novas tecnologias, na 2ª fase do Programa de
Modernização, a escola foi equipada com novos computadores, videoprojetores e
quadros interativos.
A escola funciona entre as 8h15m e as 18h20m para o ensino diurno, e
entre as 19h15 e as 24h para o ensino noturno, estando as atividades letivas
estruturadas em blocos de 90 minutos e/ou segmentos de 45 minutos.
No Projeto Educativo de Escola apresentam como objetivo a manutenção da
oferta educativa diurna na relação de 60% de cursos de carácter geral e 40% de
cursos profissionais e tecnológicos, para além do desenvolvimento dos cursos
noturnos de educação e formação de adultos (EFA).
Para o presente ano letivo, a oferta curricular é vasta e vai desde o ensino
básico - onde têm recebido uma elevada percentagem de alunos com dificuldades
de aprendizagem e problemas ao nível do comportamento – ao ensino secundário
através dos cursos científico-humanísticos – referência da escola – e dos cursos
profissionais. O ensino noturno também faz parte da oferta curricular através dos
cursos EFA, dos cursos científico-humanísticos (por módulos) e de um curso de
especialização tecnológica (CET). Completam a oferta curricular através de
diversas formações modulares de 25 ou 50 horas, em regime pós-laboral.
4
Com o objetivo de manter a taxa de abandono escolar abaixo de 1% e a
taxa de sucesso acima dos 85%, mantém um corpo docente estável e, na sua
maioria, experiente, de 119 professores do quadro e 45 contratados, para além dos
31 funcionários, respeitantes ao pessoal não docente.
No total, a escola conta com 1314 alunos, sendo 1077 do ensino
secundário, encontrando-se 99 em cursos tecnológicos, 489 em científico-
humanísticos, 91 no ensino recorrente, 254 em cursos profissionais – distribuídos
pelas áreas do teatro, informática, multimédia, secretariado, turismo e desporto – e
144 em cursos EFA e 237 alunos do ensino básico, encontram-se 213
matriculados no ensino regular e 24 no curso EFA.
Destes 1314 alunos, 6,3% são de nacionalidade estrangeira, o que dá um
total 83 alunos.
IDENTIFICAÇÃO E CARACTERIZAÇÃO DA TURMA
A turma que foi objeto da intervenção era formada, no início do ano letivo,
por 24 elementos, no entanto durante o mês de outubro desistiu um aluno.
Em termos etários, a turma revelou-se um pouco heterogénea, existindo
alunos entre os 15 e os 19 anos. Também se pode concluir que apenas seis
elementos nunca estiveram retidos. Os alunos apresentaram como motivos para as
retenções a ineficácia dos métodos utilizados em aula, a falta de hábitos e métodos
de trabalho e de estudo, a dificuldade em compreender a explicação do professor,
o ambiente indisciplinado em aula, a falta de gosto pela aprendizagem, a falta de
pré-requisitos, o mau comportamento, uma opção dos encarregados de educação
ou ter sido matriculado na escola numa altura tardia do ano letivo.
A turma é maioritariamente composta por alunos do sexo masculino, 21, e
apenas dois elementos são do sexo feminino.
De acordo com a legislação atual, nas disciplinas da componente técnica
dos cursos profissionais, a turma será dividida em dois turnos a fim de facilitar uma
melhor gestão da sala de aula e dos equipamentos tecnológicos dando, desta
forma, prioridade a aulas eminentemente práticas. Relativamente aos elementos
que fazem parte do turno que irá ser objeto da intervenção: é constituído por dez
alunos e duas alunas, sendo que o mais novo tem 15 anos e o mais velho tem 17,
revelando-se este grupo como o mais homogéneo, verificando-se ainda que um
terço deste grupo nunca ficou retido, encontrando-se na idade correspondente ao
ano de escolaridade.
Deste grupo de alunos conclui-se que dez são portugueses, um é brasileiro
e um nasceu em Itália mas tem nacionalidade brasileira, tendo ainda vivido nos
5
Estados Unidos durante cinco anos. Os dois alunos de nacionalidade brasileira
chegaram a Portugal durante o verão, sendo este o primeiro ano letivo numa
escola portuguesa.
A maioria dos alunos usa o autocarro ou o metro para se deslocar para a
escola, demorando em média 20 minutos no trajeto, no entanto, há dois alunos que
vivem no concelho de Sintra e têm que fazer uso do comboio, demorando 60
minutos até chegar à escola.
No que diz respeito a problemas de saúde e de acordo com as informações
facultadas pela Diretora de Turma, há uma aluna que sofre de perturbação de
défice e hiperatividade subtipo desatento, correspondente a Classificação
Internacional da Funcionalidade, Incapacidade e Saúde (CIF), b140 e b144
(funções da atenção e da memória) de grau 2 moderado. Estas necessidades
identificadas justificam, ao abrigo do Dec. Lei n.º 3/2008, um apoio pedagógico
acrescido e a execução de algumas medidas previstas como a adequação do
processo de avaliação, com mais tempo para a realização de tarefas,
eventualmente avaliação oral, tecnologias e materiais adaptados, se necessário.
Apesar deste diagnóstico, a informação fornecida pela Diretora de Turma
(professora Carla Carvalho), é que se trata de uma aluna muito dedicada que está
a conseguir bons resultados académicos.
Durante os tempos livres, os alunos gostam de atividades tão diversas como
jogar futebol americano, tocar guitarra e piano, navegar na Internet, praticar artes
marciais, jogos de vídeo, ouvir música, desenvolver portais web e passear.
Quanto à organização de estudo fora da escola, os alunos afirmaram que
têm condições para estudar em casa, usando, na sua maioria, o quarto, mas só o
fazem quando necessitam, existindo apenas uma aluna que afirma que estuda
diariamente. Na sua maioria, referiram ainda que, quando surgem dificuldades na
realização de algum trabalho, pedem ajuda aos pais ou aos irmãos, havendo três
alunos que referem o explicador como o apoio fora da escola.
Passando à análise do contexto familiar, podem considerar-se, de modo a
obter-se uma melhor caracterização, algumas variáveis como o agregado familiar,
o nível académico, a situação profissional e ainda o grau de participação dos
encarregados de educação na vida escolar.
Quanto ao agregado familiar, verifica-se que a maioria (oito) vive com o
núcleo original (pai, mãe e eventuais irmãos), uma minoria vive apenas com um
dos progenitores (três) ou com um dos progenitores e a família de um segundo
casamento (um) e um outro aluno vive com os avós.

6
Relativamente ao grau de parentesco com os encarregados de educação,
existe apenas um aluno que não é representado por um dos progenitores, mas sim
pelo avô.
A formação académica dos progenitores é desconhecida em 50% dos
elementos, quatro não completaram a escolaridade mínima obrigatória, um tem
frequência do ensino secundário, três completaram o ensino secundário, um é
bacharel, dois são licenciados e um é doutorado.
Esta situação tem um reflexo natural na estrutura profissional dos
progenitores, em que predominam os(as) empregados(as) de comércio e serviços
e outros(as) trabalhadores(as) por conta de outrem de nível baixo ou intermédio.
Apenas temos referência a uma professora, um solicitador e um chefe da PSP.
Existem ainda três casos de desemprego.
Passando à análise das competências transversais, sendo a turma
composta por dez alunos portugueses e dois brasileiros, poderia concluir-se que
são fluentes na língua portuguesa, no entanto, por informação da Diretora de
Turma, a generalidade dos alunos revela muitas dificuldades na expressão e
compreensão escrita da língua, no entanto, ao nível da expressão oral, os alunos
não apresentam quaisquer dificuldades, revelando até um excelente nível de
argumentação.
O nível de participação dos alunos varia muito consoante a disciplina e os
próprios conteúdos, no entanto, não são em momento algum, uma turma apática.
Na dimensão vocacional e relacional com o curso profissional, no que
respeita à escolha do curso, a maioria dos alunos refere que fez esta opção por
gostar de computadores, sendo que alguns referiram especificamente que gostam
e querem desenvolver os seus conhecimentos na área da programação.
Através da Diretora de Turma, os alunos têm revelado o que pensam acerca
do curso, mostrando conhecimento sobre os conteúdos que irão abordar durante o
ciclo. Contudo, as suas perceções iniciais eram de que o curso seria mais fácil.
Relativamente ao regulamento os alunos revelam um total desconhecimento,
apesar de lhes ter sido dada essa informação no início do ano letivo, ou seja, os
alunos não sabiam como funcionava a avaliação modular, assim como não têm
noção do curto limite de faltas, apesar de serem uma turma assídua, e que só têm
direito a um Plano Individual de Trabalho (PIT) por disciplina por ciclo.
Os alunos têm apresentado muitas variações no que diz respeito à
satisfação em relação ao curso, o que se compreende, tendo em conta a idade e a
pouca maturidade do grupo. Apesar das variações de satisfação, não existe no
grupo perspetiva de desistências ou de mudança de curso.

7
Relativamente ao prosseguimento de estudos, apenas uma minoria quer
seguir estudos superiores e os restantes querem ir trabalhar na área, com
ambições que vão desde “ir trabalhar para a Microsoft”, “ser técnico de informática
numa loja” ou “qualquer coisa na área”. Há ainda uma aluna que quer seguir para a
Universidade para se licenciar em Medicina Veterinária.
Todos os alunos dispõem de computador com acesso à Internet em casa,
usando-o diariamente para navegar na Internet, jogar e estudar, o que pode
evidenciar que são competentes do ponto de vista tecnológico e interessados em
desenvolver essa competência.
Em sala de aula, os alunos, dependendo da disciplina e dos conteúdos,
trabalham com aproveitamento, em grupo ou individualmente, mantendo relações
dinâmicas de entreajuda.
Na área técnica, os professores privilegiam os trabalhos práticos. Já nas
áreas sócio-cultural e científica, os professores dão primazia ao trabalho teórico,
avaliando os alunos, na sua maioria, através de testes.
Os alunos, na generalidade, são faladores e imaturos, no entanto, são muito
afáveis e respeitadores. Relacionam-se de uma forma muito saudável, passando
os intervalos juntos, normalmente a jogar matraquilhos, ping-pong ou jogos de
vídeo, distanciando-se aqui, apenas as duas meninas da turma.

8
9
UNIDADE DIDÁTICA
CURSO
A portaria n.º 916/2005 de 26 de setembro possibilitou a criação do curso
profissional de Técnico de Gestão e Programação de Sistemas Informáticos, que
visa a saída profissional de técnico de gestão e programação de sistemas
informáticos, extinguindo o curso profissional de Técnico de Gestão de Sistemas
Informáticos.
O plano de estudos do curso subdivide-se em três componentes de
formação. A sociocultural, que engloba as disciplinas de Português, Língua
Estrangeira I ou II, Educação Física, Área de Integração e Tecnologias da
Informação e Comunicação. A componente Científica é composta pelas disciplinas
de Matemática e Física e Química. Por fim, a área Técnica abrange as disciplinas
de Sistemas Operativos, Redes de Comunicação, Arquitetura de Computadores,
Programação de Sistemas de Informação (PSI) e Formação em Contexto de
Trabalho.
No total, o curso é composto por 3100 horas, sendo a componente Técnica
a que tem mais horas, 1600, seguida da sociocultural com 1000 horas e, por fim, a
Científica com 500 horas.
Ao concluírem com aproveitamento o curso, ser-lhes-á atribuído um diploma
de conclusão de nível secundário e um certificado de qualificação profissional de
nível 4.
De acordo com o anexo n.º2 da portaria 916/2005 de 26 de setembro, o “técnico
de gestão e programação de sistemas informáticos é o profissional apto a realizar,
de forma autónoma ou integrado numa equipa, atividades de conceção,
especificação, projeto, implementação, avaliação, suporte e manutenção de
sistemas informáticos e de tecnologias de processamento e transmissão de dados
e informações. As atividades principais desempenhadas por este técnico são:
• Instalar, configurar e efetuar a manutenção de computadores isolados ou
inseridos numa rede local;
• Instalar, configurar e efetuar a manutenção de periféricos de computadores
ou de uma rede local;
• Instalar, configurar e efetuar a manutenção de estruturas e equipamentos de
redes locais;
• Instalar, configurar e efetuar a manutenção de sistemas operativos de
clientes e de servidores;

10
• Implementar e efetuar a manutenção de políticas de segurança em sistemas
informáticos;
• Instalar, configurar e efetuar a manutenção de aplicações informáticas;
• Efetuar a análise de sistemas de informação;
• Conceber algoritmos através da divisão dos problemas em componentes;
• Desenvolver, distribuir, instalar e efetuar a manutenção de aplicações
informáticas, utilizando ambientes e linguagens de programação
procedimentais e visuais;
• Conceber, implementar e efetuar a manutenção de bases de dados;
• Manipular dados retirados de bases de dados;
• Instalar, configurar e efetuar a manutenção de servidores para a Internet;
• Planificar, executar e efetuar a manutenção de páginas e sítios na Internet;
• Desenvolver, instalar e efetuar a manutenção de sistemas de informação
baseados nas tecnologias web.”
DISCIPLINA
A intervenção foi desenvolvida na disciplina de Programação e Sistemas de
Informação (PSI). O seu programa foi desenvolvido pela Direção-Geral de
Formação Vocacional no ano de 2005.
O programa da disciplina apresenta-a como tendo finalidades que vão desde a
promoção da autonomia, criatividade, responsabilidade, o trabalho em equipa,
práticas de diagnóstico até ao desenvolvimento da capacidade de análise e solução
de problemas reais na área da informática. São então apresentadas como
competências a desenvolver:
• “Efetuar a análise e desenvolvimento de sistemas de informação
• Conceber algoritmos através da divisão dos problemas em componentes
• Desenvolver, distribuir, instalar e efetuar a manutenção de aplicações
informáticas, utilizando ambientes e linguagens de programação orientadas
a objetos, procedimentais e visuais
• Estimular o raciocínio lógico
• Saber escolher e adequar as soluções tecnológicas aos problemas a
resolver
• Gestão do desenvolvimento de um projeto
• Estimular a reflexão, a observação e autonomia
• Saber escolher a arquitetura da solução mais adequada ao problema

11
• Utilizar as potencialidades e características das bases de dados relacionais
nas suas múltiplas funções
• Desenhar e construir uma base de dados relacional”
(Direção-Geral de Formação Vocacional, 2005)
A disciplina surge da integração das disciplinas de programação e de bases
de dados, permitindo uma “formação específica na área da conceção, programação
e manutenção de sistemas de informação, bem como uma formação sólida nas
técnicas fundamentais de programação” (Direção-Geral de Formação Vocacional,
2005).
Encontra-se estruturada em 19 módulos, sendo 16 de caráter obrigatório
(anexo A) e três de caráter opcional, cujos temas são selecionados de entre uma
lista de sete módulos com conteúdos alternativos (anexo B).
No anexo C, encontra-se o mapa conceptual para os módulos que são
lecionados no primeiro ano do curso.
As cargas horárias indicadas para cada módulo são apenas uma sugestão,
pelo que o professor tem disponibilidade para fazer os ajustes necessários de
acordo com as características e necessidades específicas de cada turma ou aluno.
No que respeita à avaliação da disciplina, “no início do ano letivo, o
professor deverá efetuar uma avaliação diagnóstica com o propósito de poder
orientar as suas planificações de modo a permitir o desenvolvimento de
competências mais avançadas aos alunos que mostrem dominar as competências
essenciais delineadas”.
Ao ser uma disciplina de cariz predominantemente prático, é imperativo que
o professor adote estratégias que motivem o aluno e que lhe permitam desenvolver
competências como a autonomia e a iniciativa. Desta forma, deverá propor
atividades contextualizadas, baseadas em resolução de problemas que simulem a
realidade.
A avaliação deverá ser formativa, dando ênfase aos trabalhos práticos
desenvolvidos pelos alunos, devendo o professor refletir com os alunos sobre o que
há a melhorar em cada momento.
Como é uma disciplina fundamental para o curso, é sugerido o
desdobramento da turma a 100% da carga horária, para que exista um melhor e
maior acompanhamento aos alunos.

12
MÓDULO
O módulo que foi alvo da intervenção foi o número três, que tem por nome
Programação Estruturada. Tem como objetivo dar uma visão global da estruturação
de programas, compreendendo que a utilização de subprogramas possibilita a
reutilização de código.
Os alunos devem ficar a conhecer as regras de declaração e utilização de
subprogramas, assim como controlar o ciclo de vida das variáveis. Devem tomar
consciência da independência dos subprogramas relativamente aos programas
através do uso da parametrização.
Estes conceitos visam encaminhar os alunos para soluções mais eficientes
e promover a divisão de problemas em componentes simples como meio de
solução de problemas complexos.
No final deste módulo os alunos devem ter adquirido conhecimentos,
procedimentos e atitudes que lhes permitam: i) Adquirir a noção de subprograma; ii)
Conhecer as regras de declaração de subprogramas; iii) Utilizar corretamente
parâmetros; iv) Distinguir os diferentes tipos de subprogramas; v) Elaborar
programas com recurso a subprogramas; vi) Conhecer as regras para a criação de
bibliotecas de subprogramas; vii) Conhecer os mecanismos de utilização de
bibliotecas de subprogramas.
CONTEÚDOS
A programação estruturada tem como característica específica a
programação modular, que visa reduzir a complexidade dos programas extensos,
dividindo-os em subprogramas, mais fáceis de elaborar, perceber, modificar, testar
e corrigir. Assim, um programa pode ser composto por um programa principal e por
vários subprogramas (procedimentos e funções) (Carvalho, 2010).
Os procedimentos têm, de um modo geral, o propósito de efetuar uma ou
mais tarefas específicas que têm. As funções, para além de podem realizar um
conjunto de tarefas, têm a particularidade de devolver um valor (Azul, 2010).
Assim, dentro de um programa temos o programa principal e os diversos
subprogramas que têm como grande vantagem a capacidade de os invocar
repetidamente em vários locais do programa principal. Cada um deles tem uma
parte declarativa (declaração das variáveis para uso local) e uma parte operativa
(operações específicas). Quando se declaram variáveis no programa principal são
denominadas de variáveis globais, que podem ser usadas em todo o programa.
Quando uma variável é declarada na parte declarativa de um subprograma, apenas

13
pode ser utilizada nesse subprograma e é denominada de variável local (Azul,
2010).
Pode dizer-se que parâmetros são variáveis que estão inseridos nos
cabeçalhos dos subprogramas e que são usados nas chamadas a esses mesmos
subprogramas. Os valores indicados nessas chamadas são denominados de
argumentos (Azul, 2010).
OPINIÕES DE PROFISSIONAIS De modo a obter opiniões sobre a forma como a disciplina está estruturada,
questionei alguns profissionais da área (programadores e docentes) para que me
dessem a sua opinião sobre a estruturação do programa e seus conteúdos,
pertinência de um outro conteúdo que não se encontre no programa, e ainda sobre
as dificuldades que usualmente os alunos apresentam aquando da lecionação dos
módulos três e quatro.
A programadora Leonor Mendes afirmou que o programa se encontra bem
estruturado, com exceção dos módulos sete e oito, que lhe parecem
desenquadrados. Considera os conteúdos interessantes e abrangentes, fornecendo
uma ótima base para quem quer seguir esta área. Deu especial ênfase aos
módulos relacionados com bases de dados, que deverão ser bem explorados,
aplicando os conhecimentos a situações reais, uma vez que têm grande aplicação
no mundo de trabalho.
O programador da Empresa de Arquivo de Documentação (EAD), Márcio
Oliveira referiu que “a estrutura parece-me bem e os conteúdos fundamentais estão
lá todos!”, tendo apenas feito a ressalva que esses conteúdos poderão ser
demasiado aprofundados para alunos do ensino secundário.
O professor da Escola Profissional do Montijo, Pedro Mesquita defende que
o programa se encontra bem estruturado, começando pelas noções de algoritmia e
pensamento lógico. A programação estruturada dá início às noções de
programação, aprofundando um pouco mais através da programação orientada por
objetos. Seguem-se depois as bases de dados e a linguagem SQL. Concorda com
as horas atribuídas para a elaboração do projeto, bem como com os módulos
opcionais, apesar de existir um que nunca escolheria (Organização e gestão de
empresas). Em relação aos conteúdos, considera-os interessantes para os
formandos que gostem da área. São muito técnicos e com uma carga horária muito
intensa, o que faz com que seja importante que os formandos gostem daquilo que
se leciona. No que diz respeito ao prosseguimento de estudos, afirma que este tipo
de cursos encontra-se vocacionado para os alunos que pretendem ir trabalhar, no

14
entanto, os que quiserem seguir para a universidade não sentirão tantas
dificuldades nas disciplinas iniciais de programação. No que diz respeito ao módulo
que irá ser alvo da intervenção – Programação Estruturada – o professor
mencionou “que os alunos têm facilidade em aprender os conteúdos. Têm
facilidade em aprender a utilidade da função propriamente dita, não obstante,
sentem mais dificuldades quando há necessidade de trabalhar com argumentos”.
Por fim, em relação ao módulo quatro – Estruturas de Dados Estáticas –, que irá
ser alvo de uma introdução aos seus conteúdos, Mesquita defende que “há sempre
alguma dificuldade em compreender, de forma abstrata o que são arrays. Os
formandos consideram este módulo difícil e demoram a compreender a utilização
de arrays. Apesar disso, quando percebem, tornam-se muito interessados e
passam a utilizá-los com frequência”.
O programador e diretor de departamento de informática da EAD, Marco
Santos, defende que o programa se encontra muito bem estruturado, uma vez que
aborda as grandes temáticas da programação, “desde os conceitos mais básicos
como a definição de variáveis, tipos de dados, até à programação por objetos,
manipulação de ficheiros, modelação de dados e bases de dados”, não deixando de
lado “os conceitos teóricos fundamentais de lógica, fluxogramas, mecanismos de
herança ou os modelos relacionais (_), que muitas vezes são as lacunas dos
programadores que entram no mercado de trabalho”. Estas falhas são cada vez
mais notórias nos recém-licenciados. Por fim, considera que se poderia melhorar o
programa, com a introdução de “clássicos” como pesquisas binárias, algoritmos de
sort ou pesquisas em profundidade e largura. Conclui ainda que é importante,
desde o início, explicar, motivar e incentivar que antes de começar a programar é
fundamental saber como se vai resolver um problema, já que muitas vezes os
alunos (e alguns dos profissionais também) têm o hábito de começar a “tocar piano
sem saberem qual é a sinfonia que vão tocar”, o que, geralmente, dá mau
resultado.
O programador Hugo Monteiro considera que o programa está muito bem
estruturado, sugerindo que o empreendedorismo deve ter uma forte relação com
dia a dia dos alunos na escola, através de colóquios com gestores de empresas,
projetos livres para os alunos criarem os seus próprios negócios na web, utilizando
as redes sociais para fazer marketing sobre os seus produtos (fictícios).
15
PROBLEMATIZAÇÃO
O QUE É PROGRAMAR?
Gomes, Henriques e Mendes (2008) consideram que programar é um
conceito bipolar. Por um lado é uma arte, porque exige criatividade, e, por outro, é
uma ciência, devido à existência de um enorme conjunto de regras orientadoras a
seguir, é exigido o uso de lógica e alguns métodos muito rigorosos de
programação.
Complementando esta ideia, Gomes e Mendes (2007) consideram que
programar é uma ciência complexa e para que os estudantes se tornem bons
programadores deverão adquirir uma série de competências técnicas que vão para
além dos conhecimentos das sintaxes e da linguagem de programação, uma vez
que, segundo Winslow (1996), os alunos compreendem a sintaxe mas sentem mais
dificuldades em compreender a semântica, ou seja, os algoritmos, que não são
mais do que sequências de passos que permitem realizar um determinada tarefa.
Assim, segundo Lamim (2008) programar é o processo de escrita (através
de uma linguagem de programação), teste e manutenção de um programa de
computador.
A IMPORTÂNCIA DA PROGRAMAÇÃO
Atualmente, numa era em que o software domina a maioria da nossa
atividade diária, assume-se como cada vez mais pertinente a necessidade de as
pessoas deterem conhecimentos de programação – grande parte dos problemas do
dia a dia podem ser facilmente solucionados com recurso a esta competência. No
entanto, o certo é que apenas uma parte da população, nomeadamente os
programadores, sabe como fazê-lo, acabando por realizar a maioria das atividades
relativamente a produtos que utilizamos – a programação de um computador, de
um telemóvel, de uma caixa ATM, de um serviço triple pay de televisão, internet e
telefone (Thompson, 2010).
Tal como a linguagem escrita, a tendência natural da Programação será a
sua extensão a todos os segmentos da população, democratizando-a e tornando-a
acessível a todos os seus utilizadores (Thompson, 2010). Para que esta
democratização seja alcançada importa, sobretudo, estabelecer as bases da
aprendizagem às novas gerações, as quais, mais próximas da informação terão,
naturalmente, uma maior facilidade na compreensão da programação.
16
É DIFÍCIL? PORQUÊ?
De acordo com Esteves, Fonseca, Morgado, & Martins (2008) aprender a
programar é um processo difícil que exige vários tipos de aptidões, nomeadamente,
um alto nível de entendimento do abstrato e a complexidade da linguagem. Os
estudantes devem ter em mente que é necessária a concentração, tanto a nível dos
algoritmos como a nível da sintaxe.
PORQUE É QUE OS ALUNOS TÊM INSUCESSO?
Para além da falta das aptidões acima referidas, Gomes et al. (2008)
mencionam que faltam competências para a resolução de problemas, assim como
os métodos pedagógicos são, por vezes, inadequados. Por exemplo, o facto de
conteúdos dinâmicos serem apresentados de forma estática (apresentações
projetadas ou explicações verbais) é, segundo os autores, um claro entrave ao
desenvolvimento de conceitos por parte dos alunos. Existem ainda outras
competências não tão óbvias, mas são tanto ou mais necessárias, as
“competências de vida”. A responsabilidade, a persistência, o rigor, o saber
trabalhar colaborativamente e cooperativamente são apenas alguns exemplos
destas competências. De referir que não se trata de um conjunto de aptidões, mas
sim de uma hierarquia, já que o aluno terá que ir construindo estas competências
começando pelas de baixo nível, progredindo gradualmente até às mais exigentes
(Bereiter e Ng, 1991, citados por Gomes et al., 2008).
Outro problema apontado por Gomes et al. (2008) está relacionado com o
facto de os alunos não trabalharem o suficiente fora da sala de aula e aos métodos
de estudo que os alunos aplicam, nomeadamente abordagens baseadas em
leituras sucessivas, memorização e mecanização de procedimentos. A
programação impõe um estudo diferente, exigindo prática intensiva e verdadeira
compreensão dos assuntos e reflexão (Gomes et al., 2008).
Segundo os mesmos autores, a questão da motivação é também pertinente,
podendo derivar da imagem negativa dos programadores, que são vistos como
pessoas que socialmente não se adaptam. De acordo com Esteves et al. (2008),
levanta-se ainda a questão que, se já existem programas para tudo aquilo que os
alunos pretendem, porque hão-de eles aprender a programar.
Centrando agora a questão no professor, já se observou que a forma de
exposição estática de conteúdos dinâmicos pode ser um impedimento. No entanto,
Esteves et al. (2008) e Gomes et al. (2008) apresentam ainda outros fatores,
nomeadamente, a falta de contextualização, o ensino demasiado focado na sintaxe
da linguagem, ensino não personalizado, isto é, que não acompanha

17
permanentemente todos os alunos e que não abrange todos os tipos de métodos
de estudo.
SOLUÇÃO?
Segundo Gomes et al. (2008), o ideal seria um sistema centrado no
desenvolvimento da capacidade de resolução de problemas, onde o aluno aprende
fazendo, experimentando e deduzindo, construindo progressivamente o seu próprio
conhecimento.
“A ideia principal subjacente à aprendizagem por problemas é a de que o
ponto de partida da aprendizagem deveria ser uma situação problema, uma
interrogação, um enigma que o estudante desejaria aprender” (Boud, 1985 citado
por Abreu e Loureiro, 2007).
Segundo Brownell e Jameson (2004, citados por Abreu e Loureiro, 2007),
uma das finalidades da metodologia de aprendizagem baseada em problemas
(PBL) consiste na mudança de comportamentos através da apresentação de
situações que não se encontram bem estruturadas, simulando o que acontece com
problemas reais, tornando a solução mais complexa. Assim, os alunos têm que
começar por reconhecer o problema, clarificar os conceitos, identificar o que sabem
e o que têm que saber e depois desenvolver soluções criativas. Os estudantes
devem trabalhar em grupos pequenos, para permitir a emergência de competências
coletivas de aquisição de conhecimentos que complementam os conhecimentos
prévios, desenvolvendo competências comunicativas, requerendo assim a
colaboração e cooperação de toda a equipa, para que se atinja o objetivo da
resolução do problema (Peterson, 2004, citado por Abreu e Loureiro, 2007).
O nível elevado de raciocínio abstrato que é necessário para aprender a
programar é, como já foi referido, muitas vezes um entrave à própria aprendizagem
da programação. Segundo Pásztor, Pap-Szigeti e LakatosTörök (2010) verdadeiras
ferramentas e métodos construtivistas podem ajudar os alunos a alcançar o
elemento abstrato de programação ao nível de operações concretas.
ROBÓTICA EDUCATIVA A Robótica Educativa (RE) pode ser definida como a exploração de um
ambiente constituído pelo computador, componentes eletrónicos, eletromecânicos e
programas cuja integração destes elementos irá proporcionar a construção e
programação de dispositivos automatizados com o objetivo de explorar conceitos
das diversas áreas do conhecimento (Ribeiro, Coutinho e Costa, 2009). A RE tem
sido utilizada, ao longo do seu percurso educativo, nos mais diversos níveis de
18
ensino, não só como ferramenta para a aprendizagem dos mais diversos
conteúdos, nomeadamente, nas áreas da Física, da Matemática e da Informática,
bem como aquelas que mais diretamente lhes estão ligadas. Mas também para a
aquisição de inúmeras competências, das quais se destacam, raciocínio lógico,
habilidades manuais e estéticas, relações interpessoais e intrapessoais, utilização
de conceitos aprendidos em diversas áreas do conhecimento para o
desenvolvimento de projetos, investigação e compreensão, representação e
comunicação, trabalho com pesquisa, resolução de problemas por meio de erros e
acertos, aplicação das teorias formuladas a atividades concretas, utilização da
criatividade em diferentes situações e capacidade crítica (Gaspar, 2007; Ribeiro,
Coutinho e Costa, 2009).
O interesse na RE como instrumento de aprendizagem tem vindo a crescer,
desempenhando um papel cada vez mais ativo na construção da mesma, uma vez
que a RE, como alguns autores indicam, pode ser uma forte aliada para motivar os
alunos face a um leque de potencialidades e inúmeros benefícios.
Para os alunos, a manipulação de objetos como os robôs facilita a sua
aprendizagem, ao invés da utilização e aplicação de fórmulas e conceitos abstratos.
A utilização dos robôs permite aos mais pequenos explorar campos das ciências
exatas e engenharia de forma divertida. Nomeadamente, manter vivo o gosto pelas
ciências às raparigas que tendencialmente são as maiores visadas na perda de
interesse por esta área no secundário (Ferreira, Veruggio, Micheli e Operto,2010).
A investigação feita por Passerino e Possamai (2004) no âmbito da robótica
educativa (RE) apresenta vantagens como: i) valorização do trabalho cooperativo;
ii) favorecimento da interdisciplinaridade; iii) melhoria significativa na postura
perante novos problemas e frente ao erro; e iv) processo contínuo de colaboração,
motivação, criatividade, desenvolvimento do senso crítico, construção e
reinvenção”.
De acordo com Benitti, Vahldick, Urban, Krueger e Halma (s.d), a
viabilização do “conhecimento científico-tecnológico e, ao mesmo tempo, estimular
a criatividade e a experimentação com um forte apelo lúdico, podem ser
proporcionadas através da robótica educativa” (pg.1). Os mesmos autores
apontaram a interdisciplinaridade como uma característica promovida pela RE, uma
vez que requer conhecimentos de mecânica, matemática, programação, entre
outros. O aluno poderá ser um explorador de novas ideias e caminhos da
descoberta de aplicação de conceitos adquiridos em sala de aula e na resolução de
problemas, desenvolvendo a capacidade de elaborar hipóteses, investigar

19
soluções, estabelecer relações e tirar conclusões (Oliveira, 2007; Santos e
Menezes, 2005; Cruz et al., 2007, citados por Benitti et al., s.d).
Relativamente à robótica, Pásztor et al. (2010) apresentaram a investigação
de Wu, Tseng e Huang (2008), estudaram duas possibilidades: a utilização de kits
de robôs (NXT Lego Mindstorms, Arduino,_) ou programas que simulam robôs
(RoboMind1, webbots_). Participaram neste estudo quasi-experimental 151 alunos
de quatro turmas, 76 utilizaram os robôs físicos e 75 utilizaram simuladores de
robôs. Os resultados obtidos mostraram que, relativamente à performance, não
existiu uma diferença significativa entre os dois grupos de alunos. O grupo que
trabalhou com os robôs físicos apresentou mais atitudes positivas no que respeita
às atividades de aprendizagem, bem como conseguiram visualizar mais facilmente
o comportamento do robô.
Os resultados do estudo de Benitti et al. (s.d) revelaram que, após a
experiência com os robôs, 13% dos alunos melhoraram os resultados nos testes,
todos os alunos gostaram do trabalho realizado e revelaram ainda que gostavam de
realizar uma oficina de programação de computadores com robótica durante as
férias de verão.
CARÁTER INVESTIGATIVO
Para além da solução apresentada, proponho-me, na reflexão relativa à
intervenção, investigar sobre as potencialidades e limitações da utilização de robôs
no ensino específico dos subprogramas.
Como ferramentas de apoio, serão utilizados os resultados do exercício
diagnóstico, bem como os resultados dos alunos durante o processo de resolução
do problema e na sua apresentação. As respostas ao questionário e as
intervenções e reflexões publicadas na plataforma online serão também levadas em
conta.
1http://www.robomind.net/pt/index.html

20

21
PLANO DE INTERVENÇÃO
PRINCÍPIOS PEDAGÓGICOS DA AÇÃO
O plano de intervenção tem em conta as finalidades e competências da
disciplina e do módulo em causa, nomeadamente desenvolver a capacidade de
resolução de problemas, promover a autonomia, reflexão, criatividade,
responsabilidade, o trabalho em equipa, práticas de diagnóstico e de correção,
fomentar a descoberta e a inovação, desenvolver a capacidade de aprendizagem
de uma nova linguagem de programação, estimular o raciocínio lógico e gestão do
desenvolvimento de um projeto (Direção-Geral de Formação Vocacional, 2005).
Para além disso, tem ainda em conta as características específicas do grupo de
alunos.
Sendo uma disciplina em que a prática é essencial ao desenvolvimento das
competências, a ideia inicial e que se manteve inalterada foi o desenvolvimento de
um trabalho de grupo em que os alunos pudessem explanar as suas ideias de
forma autónoma. A metodologia a utilizar, bem como a robótica educativa surgiram
no seguimento desta ideia, sendo por fim, desenvolvido o enunciado da situação-
problema.
Os princípios pedagógicos da ação encontram-se centrados na autonomia e
responsabilidade dos alunos, para que possam, dessa forma ser o sujeito ativo do
desenvolvimento, construindo o seu próprio conhecimento.
FUNDAMENTAÇÃO E ENQUADRAMENTO CONCEPTUAL
Os alunos trabalharam em equipas de quatro elementos.
Foi utilizada a metodologia PBL, já que face a uma situação problema, os
alunos aprendem através do ato de tentar solucioná-la, interpretando a questão,
criando possíveis soluções, avaliando-as até chegarem à melhor (Deslisle, 1997,
citado por Abreu e Loureiro, 2007). Assim, os alunos desenvolvem o pensamento
crítico, analítico e reflexivo (Abreu e Loureiro, 2007).
Segundo Alves (s.d), os alunos formados em escolas que adotam este
método têm-se apresentado mais independentes, retendo os conhecimentos por
mais tempo e desenvolvem uma postura de estudo contínuo.
Pretende-se, assim, que os alunos trabalhem de forma autónoma, mas que
se entre ajudem intra e extra equipa, tanto em sala de aula como na plataforma
online, levantando questões que suscitem dúvidas, respondendo a eventuais
dúvidas e ainda partilhando conteúdos que lhes permitam ultrapassar um problema
que lhes tenha surgido.
22
De acordo com a metodologia referida foram apresentados os subprogramas
(desafios) com dificuldade crescente que as equipas deverão cumprir programando
o Robô NXT, partilhando depois na plataforma, para cada um, a reflexão sobre a
solução encontrada e um filme com o robô NXT a resolver o subprograma: i) Andar
em frente uma rotação; ii) Rodar 90º à direita; iii) Andar para a frente até detetar a
cor verde no chão; iv) Andar para a frente até detetar a cor vermelha no chão; v)
Gerar um número aleatório entre zero e cinco e andar para a frente uma rotação a
mais do que o número gerado; vi) Após um clique no botão laranja, sai do
estacionamento em marcha-atrás.
Segundo a conceção construtivista do ensino e da aprendizagem, ensinar
envolve estabelecer uma série de relações que devem conduzir à
elaboração, por parte do aluno, de representações pessoais sobre o
conteúdo objeto de aprendizagem. A pessoa, no processo de aproximação
aos objetos da cultura, utiliza a sua experiência e os instrumentos que lhe
permitem construir uma interpretação pessoal e subjetiva do que é tratado
(Zabala, 1998).
Um “ensino adaptativo” (Miras, 1991, citado por Zabala, 1998), ou seja, um
ensino que desenvolve a capacidade para se adaptar às necessidades que vão
emergindo.
Segundo Almeida, Filipe, Guedes, Lourenço e Moreira (2007), o papel do
docente deixou de estar centrado na transmissão direta de conhecimentos, para
passar a estar centrado na orientação do aluno para a aquisição de competências
através do trabalho individual e em equipa. Docente e aluno assumem-se como
agentes ativos e interdependentes no processo de ensino/aprendizagem.
O papel do docente enquanto líder mantém-se, no entanto, é encarado de
forma diferente cumprindo-lhe motivar os alunos a aprender por si próprios
(Almeida et al., 2007), utilizando uma diversidade de estratégias, que vão desde
desafiar, dirigir, propor ou comparar (Zabala, 1998).
Segundo a metodologia PBL, o professor, em vez de resolver problemas, terá
um papel de facilitador. Desta forma, deverá levantar questões orientadoras, tais
como “Qual é a vossa finalidade?” ou “O que deverão fazer a seguir?”, direcionando
a atenção dos alunos num determinado sentido, fazendo com que reflitam sobre as
diversas opções (Abreu e Loureiro, 2007).
Por fim, e para que o processo possa ser implementado, é necessário, desde
o início, que os intervenientes saibam exatamente o que se espera deles,

23
competindo ao docente, definir e partilhar os resultados de aprendizagem a atingir
na unidade curricular pela qual é responsável e a sua calendarização (Almeida et
al., 2007).
PROGRAMAR O ROBÔ
O robô NXT foi programado utilizando a linguagem NXT-G que é baseada
num ambiente gráfico em que é possível inserir, mover, interligar e remover blocos,
desenvolvendo, desta forma, os algoritmos que se pretendem. Distingue-se, assim,
de outras linguagens que são baseadas em texto e em que é necessário, ter
conhecimento de todas as sintaxes utilizadas.
Cada um dos blocos utilizados corresponde a uma ação em específico. Nas
figuras abaixo pode ver-se a diferença entre programar um ciclo em NXT-G e em
C#.
Ilustração 1
Ciclo em NXT-G
Ilustração 2
Ciclo em C#
24
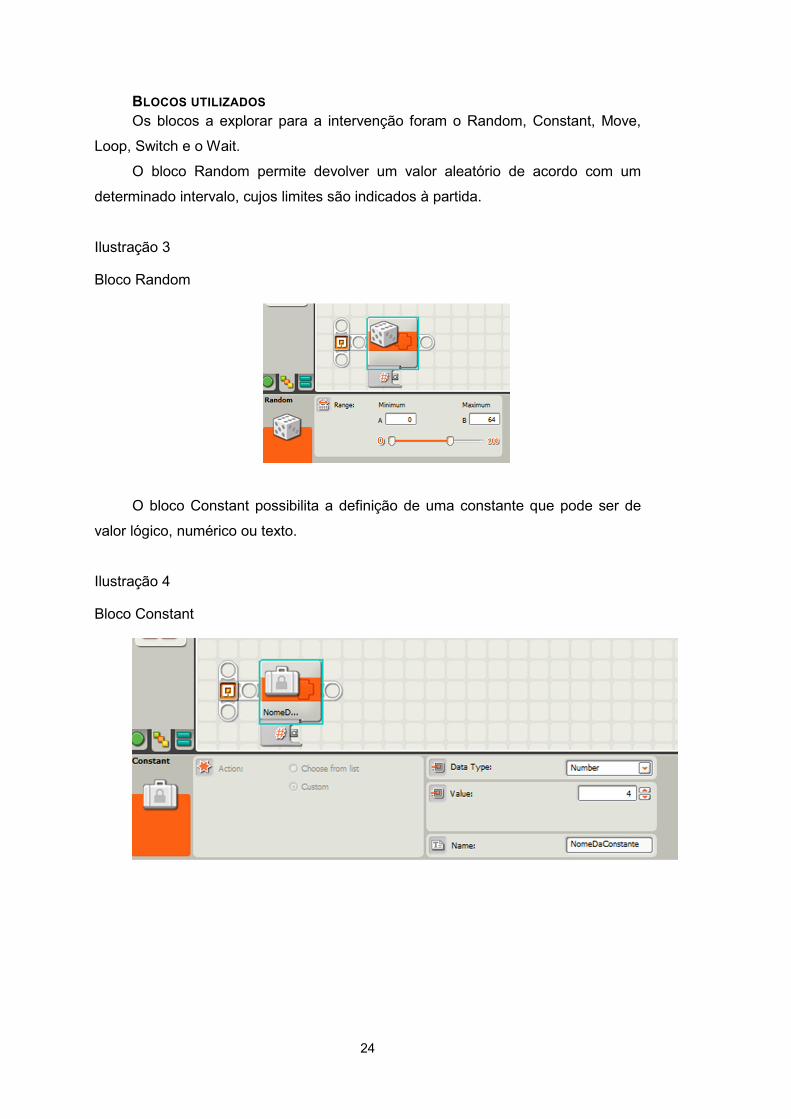
BLOCOS UTILIZADOS Os blocos a explorar para a intervenção foram o Random, Constant, Move,
Loop, Switch e o Wait.
O bloco Random permite devolver um valor aleatório de acordo com um
determinado intervalo, cujos limites são indicados à partida.
Ilustração 3
Bloco Random
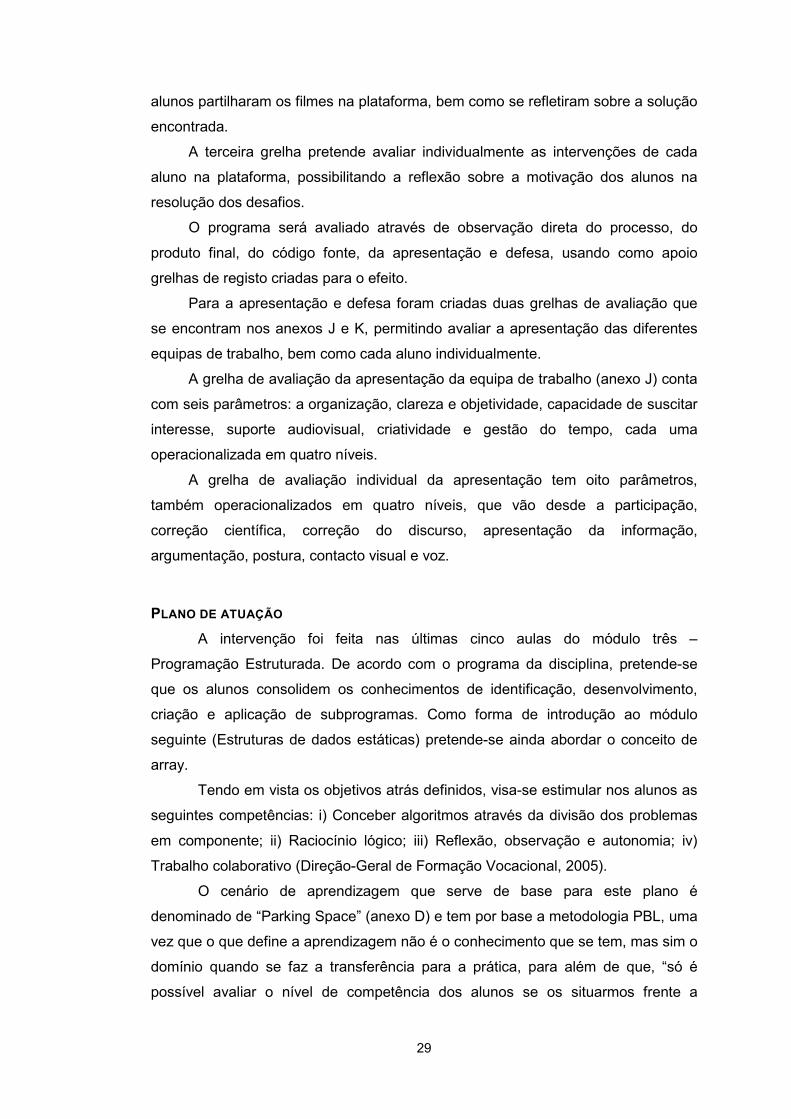
O bloco Constant possibilita a definição de uma constante que pode ser de
valor lógico, numérico ou texto.
Ilustração 4
Bloco Constant

25
O bloco Move assenta na programação de um, dois ou dos três motores do
robô, numa determinada direção (frente, trás ou parado) e com uma duração
específica (ilimitada, graus, rotações ou segundos).
Ilustração 5
Bloco Move
O bloco Loop permite o desenvolvimento de um ciclo cuja condição de
paragem pode ser através de um sensor, contador, por tempo ou por um valor
lógico. Permite ainda a criação de um ciclo infinito.
Ilustração 6
Bloco Loop

26
O sensor utilizado como condição de paragem do ciclo foi o Light Sensor, em
que deve ser definida a porta em que está ligado e o respetivo valor que serve para
controlar o ciclo.
Ilustração 7
Bloco Loop com sensor de luz
O bloco Switch possibilita o desenvolvimento de uma estrutura de decisão,
um If ou um Switch. O controlo pode ser através de um valor lógico, numérico ou de
texto. Na ilustração 8 encontra-se o exemplo de um If, em que se o valor lógico for
verdadeiro executa a instrução Move para o motor A, caso contrário executa a
instrução Move para o motor B.
Ilustração 8
If

27
Para desenvolver um Switch é necessário retirar a seleção da Flat View e
adicionar condições. No caso do exemplo abaixo, quando o valor numérico de
controlo for zero, executa a instrução Move para o motor B.
Ilustração 9
Switch
O bloco Wait serve para bloquear a execução do programa, enquanto
aguarda por uma determinada ação. Pode ser controlado através de um sensor ou
por tempo.
Ilustração 10
Bloco Wait

28
ESTRATÉGIAS DE INTERVENÇÃO E DE AVALIAÇÃO DAS APRENDIZAGENS
A aprendizagem baseada na memorização de conteúdos e na capacidade
de representá-los tem vindo a sofrer algumas mudanças, sendo que, hoje em dia é
indispensável operar em diversos contextos e desenvolver processos abstratos e
dinâmicos (Santos, 2003).
“A avaliação não constitui uma componente isolada e dissociada de todo o
processo educativo, mas acima de tudo ela é uma parte inseparável de um
complexo sistema onde o fim último do ato educativo é a aprendizagem” (Santos,
2008).
A avaliação formativa parte do princípio de que todos os alunos são capazes
de aprender, diferenciando-se apenas no ritmo em que essa aprendizagem
acontece, tornando-se num elemento essencial na melhoria do processo de ensino
e aprendizagem, procurando a consecução de objetivos e é proativa (se for
diagnóstica) ou retroativa (Santos, 2008).
Se se entender o erro como natural, este pode tornar-se num bom meio de
informação que permite aceder ao raciocínio do aluno, através da observação da
realização de uma tarefa, compreendendo como ele age face a algum imprevisto e
se é capaz de transferir conhecimentos para novas situações (Santos, 2003).
Segundo a metodologia PBL, a avaliação deve estar focada no processo de
aprendizagem de cada aluno (Kolmos, Kuru, Hansen, Eskil, Podesta, Flemming,
Graaf, Wolff e Soylu, 2007).
Na primeira sessão será efetuada uma avaliação diagnóstica, com o intuito de
verificar o que os alunos sabem e sabem fazer, traduzindo “a evidência resultante
do balanço entre o estado real e o desejado” (Santos, 2008), através dos resultados
obtidos num primeiro exercício.
Em cada sessão os alunos serão avaliados por observação direta, usando
três grelhas desenvolvidas para esse propósito (anexos G, H e I), baseadas no
trabalho “Avaliação de competências em ciências: Sugestões para professores do
ensino básico e do ensino secundário” de Galvão, Reis, Freire e Oliveira (2006).
A grelha de registo de aula contempla oito parâmetros de avaliação,
permitindo que, para além de avaliar individualmente os alunos, no final da
intervenção, se possa refletir sobre o tipo de atividades que foram planeadas e se
permitiram desenvolver as competências propostas, para além de refletir sobre o
tipo de professor que me proponho ser.
A segunda grelha contempla as avaliações das equipas sobre as partilhas na
plataforma, contando com dois parâmetros de avaliação, permitindo validar se os
29
alunos partilharam os filmes na plataforma, bem como se refletiram sobre a solução
encontrada.
A terceira grelha pretende avaliar individualmente as intervenções de cada
aluno na plataforma, possibilitando a reflexão sobre a motivação dos alunos na
resolução dos desafios.
O programa será avaliado através de observação direta do processo, do
produto final, do código fonte, da apresentação e defesa, usando como apoio
grelhas de registo criadas para o efeito.
Para a apresentação e defesa foram criadas duas grelhas de avaliação que
se encontram nos anexos J e K, permitindo avaliar a apresentação das diferentes
equipas de trabalho, bem como cada aluno individualmente.
A grelha de avaliação da apresentação da equipa de trabalho (anexo J) conta
com seis parâmetros: a organização, clareza e objetividade, capacidade de suscitar
interesse, suporte audiovisual, criatividade e gestão do tempo, cada uma
operacionalizada em quatro níveis.
A grelha de avaliação individual da apresentação tem oito parâmetros,
também operacionalizados em quatro níveis, que vão desde a participação,
correção científica, correção do discurso, apresentação da informação,
argumentação, postura, contacto visual e voz.
PLANO DE ATUAÇÃO
A intervenção foi feita nas últimas cinco aulas do módulo três –
Programação Estruturada. De acordo com o programa da disciplina, pretende-se
que os alunos consolidem os conhecimentos de identificação, desenvolvimento,
criação e aplicação de subprogramas. Como forma de introdução ao módulo
seguinte (Estruturas de dados estáticas) pretende-se ainda abordar o conceito de
array.
Tendo em vista os objetivos atrás definidos, visa-se estimular nos alunos as
seguintes competências: i) Conceber algoritmos através da divisão dos problemas
em componente; ii) Raciocínio lógico; iii) Reflexão, observação e autonomia; iv)
Trabalho colaborativo (Direção-Geral de Formação Vocacional, 2005).
O cenário de aprendizagem que serve de base para este plano é
denominado de “Parking Space” (anexo D) e tem por base a metodologia PBL, uma
vez que o que define a aprendizagem não é o conhecimento que se tem, mas sim o
domínio quando se faz a transferência para a prática, para além de que, “só é
possível avaliar o nível de competência dos alunos se os situarmos frente a

30
atividades que os obriguem a desenvolver o conteúdo procedimental e que sejam
facilmente observáveis”, que devem ser abertas, feitas em aula e permitam uma
observação sistemática de como cada um dos alunos transfere os conteúdos para a
prática (Zabala, 1998).
O cenário surgiu inicialmente com o propósito de servir de apoio à
aprendizagem de estruturas de dados estáticas, ou seja, arrays e matrizes. No
entanto, depois de discutido este tema em sala de aula com a professora Paula
Abrantes e colegas, chegou-se à conclusão que se pode usar robôs na
aprendizagem de estruturas de dados estáticas, mas apenas para se compreender
os conceitos, uma vez que os alunos, com esta tecnologia, não podem programar
arrays nem matrizes, logo não poderiam desenvolver as competências necessárias.
Então, o cenário, mantendo a mesma narrativa, sofreu alterações ao nível dos
objetivos, tornando-se o objetivo geral “dotar os alunos de competências que lhes
permitam entender o conceito de subprograma, possibilitando o seu uso em
situações distintas”. Como objetivos específicos estão definidos o desenvolvimento
do trabalho em equipa, das competências de trabalho sobre subprogramas e do
conceito de arrays.
Como pré-requisitos para o cenário, de acordo com o programa da
disciplina, os alunos necessitam de ter conhecimentos sobre mecanismos de
controlo de execução (compreender a estrutura de um programa e conhecer
estruturas de decisão e repetição) e ainda terem a noção de subprograma.
O trabalho das equipas passará pela programação do robô, simulando um
parque de estacionamento com uma fila, em que os carros estacionam de forma
autónoma, num lugar vazio. Aí, fica à espera de ser chamado pelo condutor
(através de um toque no botão laranja do robô) para se deslocar até à saída do
parque. Este tipo de trabalho permite potenciar a aprendizagem de subprogramas,
pois o programa final contém várias ações repetidas que devem dar origem a
diversos subprogramas.
DESCRIÇÃO DE OBJETIVOS ESPECÍFICOS
Segundo Birzéa (1986), “a definição dos objetivos pedagógicos é um
processo lógico de derivação do objetivo específico a partir do geral”. Assim sendo,
um “objetivo pedagógico é, por excelência, a planificação de uma intenção
educativa”.
Antes de dar início à descrição dos objetivos, subdividem-se em três tipos,
os gerais, os específicos e os operacionais. Os objetivos gerais são comuns a todas
as matérias escolares e têm uma grande capacidade de transferência. Por objetivos

31
específicos entende-se que são enunciados gerais limitados ao conteúdo particular
de uma certa disciplina. Por último, os objetivos operacionais são definidos nos
termos das atividades pedagógicas ao nível da sequência de aprendizagem
(Birzéa, 1986).
De acordo com o programa da disciplina, durante a intervenção os alunos
devem desenvolver os seguintes objetivos de aprendizagem: i) conhecer a noção
de subprograma; ii) conhecer as regras de declaração de subprogramas; iii)
conhecer as regras de execução de subprogramas; iv) elaborar programas com
recurso a subprogramas.
Tendo em conta os conteúdos a lecionar e o objetivos a atingir, foi criado,
para cada sessão, um quadro (matriz) de especificações, o qual, segundo Bloom,
Hastings e Madaus (1971, citados por Birzéa, 1986), contém no eixo das abcissas,
os principais conteúdos de uma disciplina e que serão utilizados na especificação
do objetivo operacionalizado (eixo das ordenadas). Da interseção de cada linha
com cada coluna resulta uma especificação, ou seja, o ponto de partida de certos
objetivos específicos para o conteúdo respetivo.
Perante o cenário de aprendizagem criado, foram criadas cinco matrizes de
especificação (uma por sessão), interligando os objetivos de aprendizagem com os
conteúdos a lecionar.
32
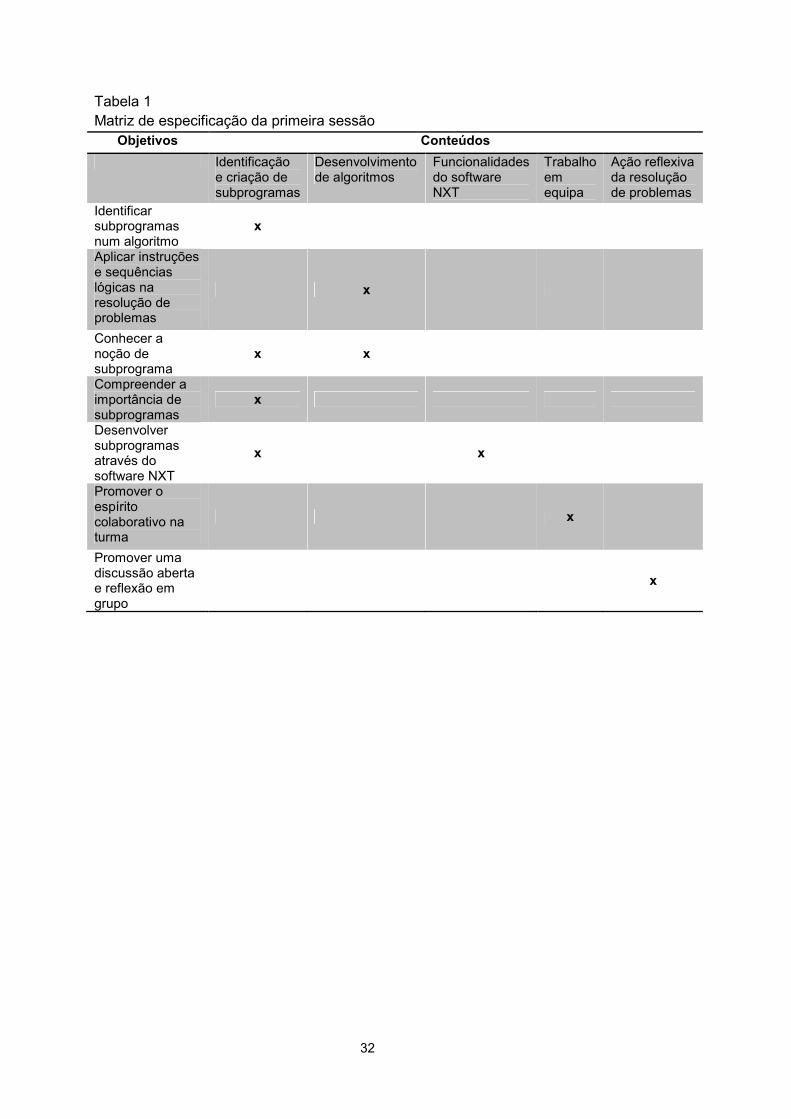
Tabela 1 Matriz de especificação da primeira sessão
Objetivos Conteúdos
Identificação e criação de subprogramas
Desenvolvimento de algoritmos
Funcionalidades do software NXT
Trabalho em equipa
Ação reflexiva da resolução de problemas
Identificar subprogramas num algoritmo
x
Aplicar instruções e sequências lógicas na resolução de problemas
x
Conhecer a noção de subprograma
x x
Compreender a importância de subprogramas
x
Desenvolver subprogramas através do software NXT
x x
Promover o espírito colaborativo na turma
x
Promover uma discussão aberta e reflexão em grupo
x

33
Tabela 2 Matriz de especificação da segunda sessão
Objetivos Conteúdos
Identificação e criação de subprogramas
Desenvolvimento de algoritmos
Funcionalidades do software NXT
Trabalho em equipa
Ação reflexiva da resolução de problemas
Compreender a importância de subprogramas
x
Aplicar instruções e sequências lógicas na resolução de problemas
X
Desenvolver subprogramas através do software NXT
x x
Promover o espírito colaborativo na turma
x
Promover uma discussão aberta e reflexão em grupo
x

34
Tabela 3 Matriz de especificação da terceira sessão
Objetivos Conteúdos
Identificação e criação de subprogramas
Desenvolvimento de algoritmos
Funcionalidades do software NXT
Trabalho em equipa
Ação reflexiva da resolução de problemas
Compreender a importância de subprogramas
x
Aplicar instruções e sequências lógicas na resolução de problemas
x
Desenvolver subprogramas através do software NXT
x x
Promover o espírito colaborativo na turma
x
Promover uma discussão aberta e reflexão em grupo
x
Tabela 4 Matriz de especificação da quarta sessão Objetivos Conteúdos
Identificação e criação de subprogramas
Desenvolvimento de algoritmos
Funcionalidades do software NXT
Trabalho em equipa
Ação reflexiva da resolução de problemas
Compreender a importância de subprogramas
x
Aplicar os subprogramas desenvolvidas no apoio à resolução do problema
X x
Promover o espírito colaborativo na turma
x
Promover uma discussão aberta e reflexão em grupo
x

35
Tabela 5 Matriz de especificação da quinta sessão
Objetivos Conteúdos
Desenvolvimento de algoritmos
Funcionalidades do software NXT
Trabalho em equipa
Ação reflexiva da resolução de problemas
Apresentar as fases de desenvolvimento do problema perante a turma
x x
Promover o espírito colaborativo na turma
x
Estimular o sentido crítico
x
Promover o debate e reflexão entre a turma
x
De acordo com Zabala (1998), a conceção construtivista da aprendizagem
pressupõe uma série de princípios psicopedagógicos determinantes para
estabelecer referências para a análise da prática pedagógica. Para que se dê o que
denominamos por “aprender”, é necessária uma atualização dos nossos esquemas
de conhecimento, ou seja, das representações que possuímos sobre algum objeto
de conhecimento. Estes esquemas, ao longo da vida, sofrem modificações
tornando-se mais complexos e adaptados à realidade. Dependem do nível de
desenvolvimento e dos conhecimentos previamente adquiridos por cada um. Para
que surjam essas modificações dos esquemas de conhecimento é imperativa a
existência de uma situação de aprendizagem que pode funcionar como um
processo de construção, comparação e de revisão dos conteúdos, fazendo com
que os alunos identifiquem semelhanças e integrem os novos conteúdos nos seus
esquemas, acontecendo assim o que se denomina por aprendizagem significativa.
Ainda segundo o mesmo autor, aluno e docente devem ter um papel
igualmente ativo, devendo o professor proporcionar experiências aos discentes
para que possam explorar, comparar e analisar os conteúdos em conjunto e
autonomamente, utilizando-os em situações diversas.
Assim, concebe-se a intervenção pedagógica como uma ajuda adaptada ao
processo de construção do aluno; uma intervenção que vai criando Zonas de
Desenvolvimento Proximal (Vygotsky, 1979) e que ajuda os alunos a percorrê-las.
Portanto, a situação de ensino e aprendizagem também pode ser considerada
como um processo dirigido a superar desafios, desafios que possam ser

36
enfrentados e que façam avançar um pouco mais além do ponto de partida
(Zabala, 1998).
Então, as matrizes de especificação previamente desenvolvidas deram
origem aos planos para cada sessão.

37
Tabela 6 Plano de sessão n.º 1
Fases Metodologia Equipamentos / Meios
didáticos Avaliação Tempo
Apresentação dos objetivos da aula e respetivos conteúdos a abordar
Interação entre professor e alunos, esclarecendo eventuais questões destes
• Computador com vídeoprojetor
• Apresentação eletrónica
• Assiduidade • Pontualidade
5’
Verificação de pré-requisitos
1. Exercício de identificação de subprogramas
2. Correção do exercício, interagindo com os alunos requerendo que apresentem as suas soluções
Diagnóstica através dos resultados obtidos no exercício e da observação das soluções apresentadas oralmente, usando uma grelha de registo
20’
Apresentação do problema a resolver
1. Interação entre professor e alunos, esclarecendo eventuais questões destes
2. Criação de 3 equipas de 4 alunos
• Computador com vídeoprojetor
• Apresentação eletrónica
10’
Acompanhamento dos alunos, fomentando o trabalho em equipa e a pesquisa
1. Elaboração do 1º subprograma
2. Testar 3. Reflexão e partilha
na plataforma
• 3 computadores com software NXT instalado
• 3 computadores com acesso à Internet
• 3 robôs NXT • Telemóvel com
câmara fotográfica e de filmar
• Plataforma online
• Observação da colaboração entre os membros de cada equipa, da autonomia no desenvolvimento do algoritmo e no contacto com o software NXT, usando uma grelha de registo
• Registo das partilhas efetuadas na plataforma
55’ ’
Sessão n.º 1 Unidade didática / Módulo Programação Estruturada
Tempo letivo
90 minutos
Objetivos da aprendizagem Conteúdos curriculares
O formando deverá ser capaz de:
• Identificar subprogramas num algoritmo • Aplicar instruções e sequências lógicas na resolução de problemas • Conhecer a noção de subprograma • Compreender a importância de subprogramas • Conhecer as regras de declaração de subprogramas • Trabalhar sobre o software Lego Mindstorm NXT 2.0 (NXT)
1. Identificação e criação de subprogramas
2. Desenvolvimento de algoritmos 3. Funcionalidades do software NXT

38
Tabela 7 Plano de sessão n.º 2
Fases Metodologia Equipamentos / Meios didáticos
Avaliação Tempo
Apresentação dos objetivos da aula e respetivos conteúdos a abordar
1. Interação entre professor e alunos, esclarecendo eventuais questões destes
2. Enunciação dos 2º,3º e 4º subprogramas
• Assiduidade • Pontualidade
5’
Acompanhamento dos alunos, fomentando o trabalho em equipa e a pesquisa
1. Elaboração do 2º subprograma
2. Testar 3. Reflexão e partilha na
plataforma 4. Elaboração do 3º
subprograma 5. Testar 6. Reflexão e partilha na
plataforma 7. Elaboração do 4º
subprograma 8. Testar 9. Reflexão e partilha na
plataforma
• 3 computadores com software NXT instalado
• 3 computadores com acesso à Internet
• 3 robôs NXT • Telemóvel com
câmara fotográfica e de filmar
• Plataforma online
Observação da colaboração entre os membros de cada equipa, da autonomia no desenvolvimento do algoritmo e no contacto com o software NXT, usando uma grelha de registo
85’
Promover o espírito colaborativo
1. Interação entre professor e alunos, incentivando-os a trabalhar de forma colaborativa
2. Partilha de experiências (texto, fotos e vídeos) e eventuais questões na plataforma
• Plataforma online Observação da colaboração entre alunos e registo das partilhas efetuadas na plataforma, usando uma grelha de registo
Sessão n.º 2 Unidade didática / Módulo Programação Estruturada
Tempo letivo 90 minutos
Objetivos da aprendizagem Conteúdos curriculares
O formando deverá ser capaz de:
• Identificar possíveis subprogramas num algoritmo • Compreender a importância de subprogramas • Desenvolver subprogramas através do software NXT • Promover o espírito colaborativo na turma
1. Desenvolvimento de subprogramas 2. Funcionalidades do software NXT

39
Tabela 8 Plano de sessão n.º 3
Fases Metodologia Equipamentos / Meios didáticos
Avaliação Tempo
Apresentação dos objetivos da aula e respetivos conteúdos a abordar
1. Interação entre professor e alunos, esclarecendo eventuais questões destes
2. Enunciação dos 5º e 6º subprogramas
• Assiduidade • Pontualidade
5’
Acompanhamento dos alunos, fomentando o trabalho em equipa e a pesquisa
1. Elaboração do 5º subprograma
2. Testar 3. Reflexão e partilha na
plataforma 4. Elaboração do 6º
subprograma 5. Testar 6. Reflexão e partilha na
plataforma
• 3 computadores com software NXT instalado
• 3 computadores com acesso à Internet
• 3 robôs NXT • Telemóvel com
câmara fotográfica e de filmar
• Plataforma online
Observação da colaboração entre os membros de cada equipa, da autonomia no desenvolvimento do algoritmo e no contacto com o software NXT, usando uma grelha de registo
85’
Promover o espírito colaborativo
1. Interação entre professor e alunos, incentivando-os a trabalhar de forma colaborativa
2. Partilha de experiências (texto, fotos e vídeos) e eventuais questões na plataforma.
• Plataforma online Observação da colaboração entre alunos e registo das partilhas efetuadas na plataforma, usando uma grelha de registo
Sessão n.º 3 Unidade didática / Módulo Programação Estruturada
Tempo letivo 90 minutos
Objetivos da aprendizagem Conteúdos curriculares
O formando deverá ser capaz de:
• Identificar possíveis subprogramas num algoritmo • Compreender a importância de subprogramas • Desenvolver subprogramas através do software
NXT •
1. Desenvolvimento de subprogramas 2. Funcionalidades do software NXT
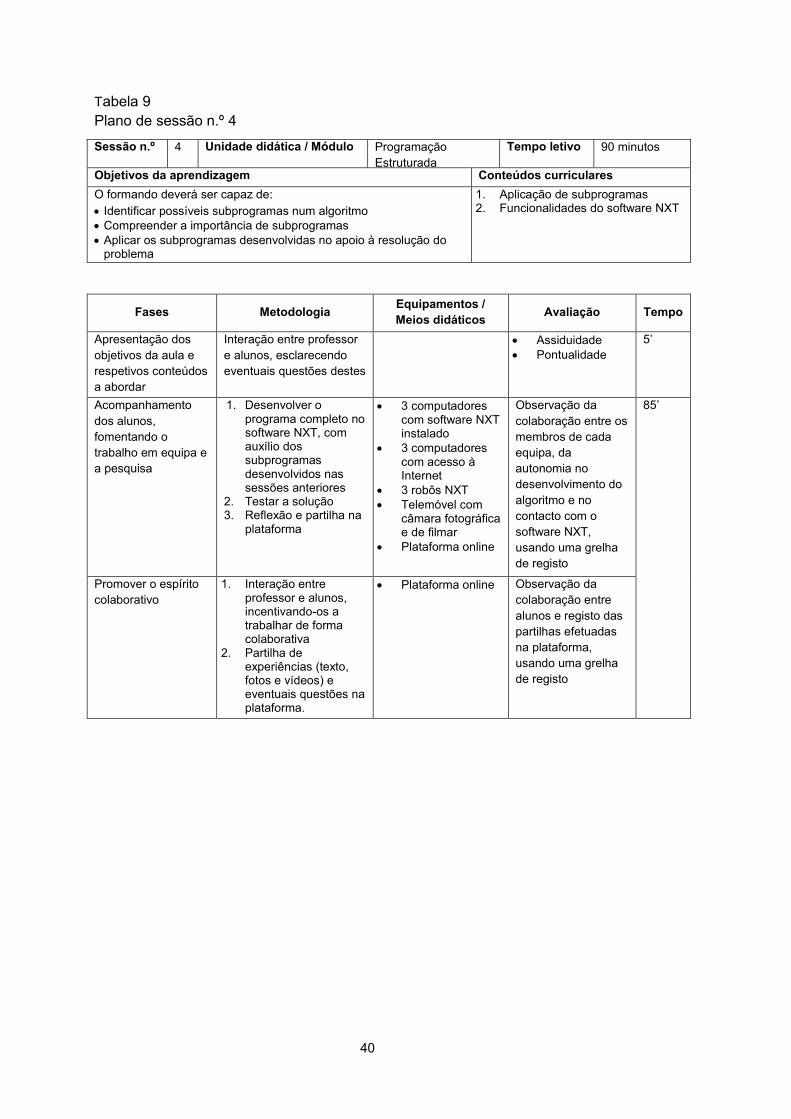
40
Tabela 9 Plano de sessão n.º 4
Fases Metodologia Equipamentos / Meios didáticos
Avaliação Tempo
Apresentação dos objetivos da aula e respetivos conteúdos a abordar
Interação entre professor e alunos, esclarecendo eventuais questões destes
• Assiduidade • Pontualidade
5’
Acompanhamento dos alunos, fomentando o trabalho em equipa e a pesquisa
1. Desenvolver o programa completo no software NXT, com auxílio dos subprogramas desenvolvidos nas sessões anteriores
2. Testar a solução 3. Reflexão e partilha na
plataforma
• 3 computadores com software NXT instalado
• 3 computadores com acesso à Internet
• 3 robôs NXT • Telemóvel com
câmara fotográfica e de filmar
• Plataforma online
Observação da colaboração entre os membros de cada equipa, da autonomia no desenvolvimento do algoritmo e no contacto com o software NXT, usando uma grelha de registo
85’
Promover o espírito colaborativo
1. Interação entre professor e alunos, incentivando-os a trabalhar de forma colaborativa
2. Partilha de experiências (texto, fotos e vídeos) e eventuais questões na plataforma.
• Plataforma online Observação da colaboração entre alunos e registo das partilhas efetuadas na plataforma, usando uma grelha de registo
Sessão n.º 4 Unidade didática / Módulo Programação Estruturada
Tempo letivo 90 minutos
Objetivos da aprendizagem Conteúdos curriculares
O formando deverá ser capaz de:
• Identificar possíveis subprogramas num algoritmo • Compreender a importância de subprogramas • Aplicar os subprogramas desenvolvidas no apoio à resolução do
problema • Promover o espírito colaborativo na turma
1. Aplicação de subprogramas 2. Funcionalidades do software NXT

41
Tabela 10 Plano de sessão n.º 5
Fases Metodologia Equipamentos / Meios
didáticos Avaliação Tempo
Apresentação dos objetivos da aula e respetivos conteúdos a abordar
Interação entre professor e alunos, esclarecendo eventuais questões destes.
• Assiduidade • Pontualidade
5’
Apresentação dos projetos, questionando os alunos sobre as suas opções e incentivando os restantes colegas a fazê-lo também
1. Apresentação das fases de desenvolvimento do programa perante a turma
2. Partilha na plataforma de um pequeno filme robô a resolver o problema
• 1 computador com software NXT instalado
• Vídeoprojetor • 3 robôs NXT • Plataforma online
Grelha de registo
• Observação do produto final durante a apresentação e na plataforma
• Estruturação da apresentação e gestão do tempo
• Argumentação perante a turma
• Autoavaliação, através da reflexão da solução apresentada
• Hetero-avaliação
45’
Apresentação de conceito introdutivo do módulo seguinte
1. Exposição do conceito de array
2. Questionar os alunos sobre exemplos reais da aplicação do conceito
Criatividade e justificação dos exemplos obtidos, usando uma grelha de registo
10’
Partilha de experiências e opiniões
1. Apresentação de questionário à turma
2. Interação entre professor e alunos sobre os conteúdos abordados durante as sessões e sobre as atividades
Registo das opiniões dos alunos numa grelha de registo
30’
Sessão n.º 5 Unidade didática / Módulo Programação Estruturada
Tempo letivo 90 minutos
Objetivos da aprendizagem Conteúdos curriculares
O formando deverá ser capaz de:
• Apresentar as fases de desenvolvimento do problema perante a turma
• Estimular o sentido crítico • Promover o debate e reflexão entre a turma • Promover o espírito colaborativo • Apresentar exemplos reais da aplicação do conceito
de array
1. Apresentação e reflexão sobre a resolução do problema em equipa
2. Conceito de array
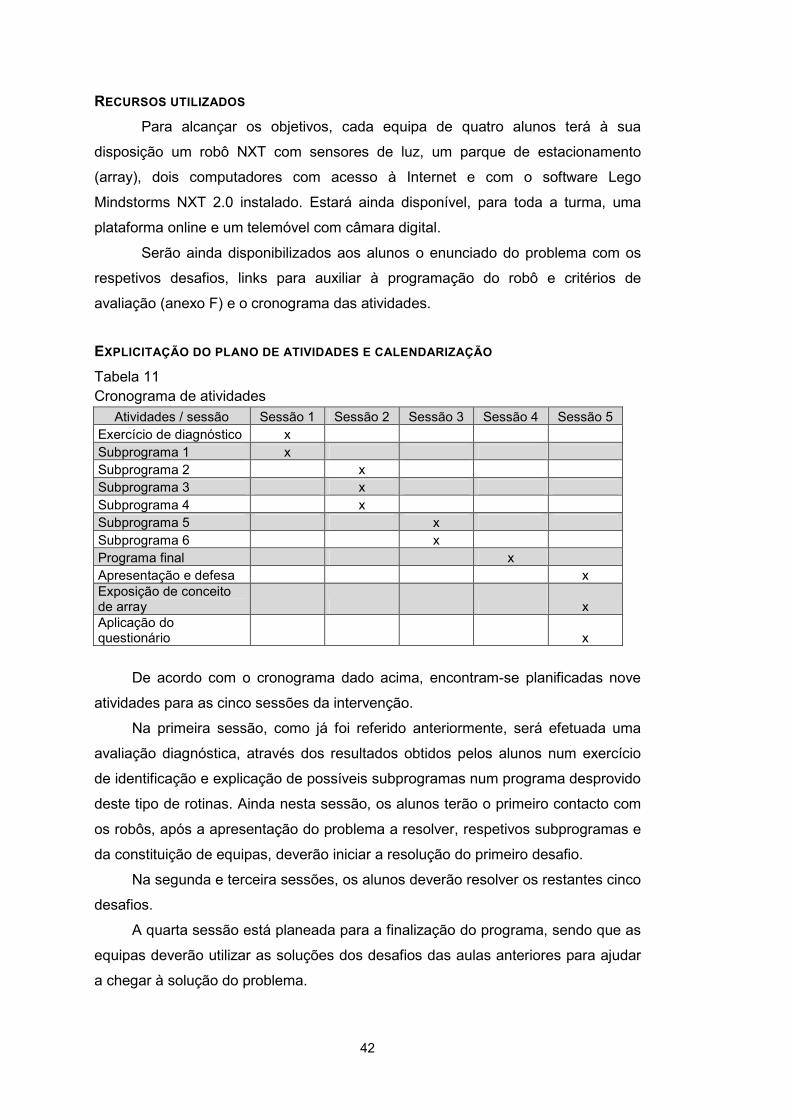
42
RECURSOS UTILIZADOS
Para alcançar os objetivos, cada equipa de quatro alunos terá à sua
disposição um robô NXT com sensores de luz, um parque de estacionamento
(array), dois computadores com acesso à Internet e com o software Lego
Mindstorms NXT 2.0 instalado. Estará ainda disponível, para toda a turma, uma
plataforma online e um telemóvel com câmara digital.
Serão ainda disponibilizados aos alunos o enunciado do problema com os
respetivos desafios, links para auxiliar à programação do robô e critérios de
avaliação (anexo F) e o cronograma das atividades.
EXPLICITAÇÃO DO PLANO DE ATIVIDADES E CALENDARIZAÇÃO
Tabela 11 Cronograma de atividades
Atividades / sessão Sessão 1 Sessão 2 Sessão 3 Sessão 4 Sessão 5 Exercício de diagnóstico x Subprograma 1 x Subprograma 2 x Subprograma 3 x Subprograma 4 x Subprograma 5 x Subprograma 6 x Programa final x Apresentação e defesa x Exposição de conceito de array x Aplicação do questionário x
De acordo com o cronograma dado acima, encontram-se planificadas nove
atividades para as cinco sessões da intervenção.
Na primeira sessão, como já foi referido anteriormente, será efetuada uma
avaliação diagnóstica, através dos resultados obtidos pelos alunos num exercício
de identificação e explicação de possíveis subprogramas num programa desprovido
deste tipo de rotinas. Ainda nesta sessão, os alunos terão o primeiro contacto com
os robôs, após a apresentação do problema a resolver, respetivos subprogramas e
da constituição de equipas, deverão iniciar a resolução do primeiro desafio.
Na segunda e terceira sessões, os alunos deverão resolver os restantes cinco
desafios.
A quarta sessão está planeada para a finalização do programa, sendo que as
equipas deverão utilizar as soluções dos desafios das aulas anteriores para ajudar
a chegar à solução do problema.

43
Durante estas primeiras quatro sessões, cada equipa, após resolver cada
desafio e também após resolver o programa, deve refletir sobre a solução
encontrada identificando as maiores dificuldades e como foram suplantadas,
partilhando na plataforma essa reflexão e ainda um pequeno filme do robô a
resolver o desafio.
Na última sessão as equipas deverão apresentar as soluções encontradas
para o problema, explicitando as diferentes fases de desenvolvimento, devendo
depois responder a eventuais questões dos colegas e professor. Será ainda feita
uma introdução ao módulo seguinte – 4 – Estruturas de Dados Estáticas – através
da exposição do conceito de array e os alunos questionados sobre exemplos de
aplicações reais do conceito. Por fim, os alunos deverão responder ao questionário
que se encontrará alojado numa página web.

44

45
AVALIAÇÃO DA INTERVENÇÃO
Para poder refletir sobre as aprendizagens dos alunos, a adequação das
atividades planeadas tendo em conta o tipo de competências que se pretendem
que os alunos trabalhem, processo, recursos utilizados e sobre o professor que sou
e que quero ser, foram desenvolvidas três grelhas de avaliação (anexos G, H e I,
explicados previamente) a preencher durante as sessões e um questionário a
apresentar aos alunos no final da última aula (anexo L).
O inquérito a apresentar aos alunos na última aula conta com 16 questões,
devendo o aluno escolher a que melhor expressa a opinião pessoal, utilizando, nas
primeiras seis, a escala de Likert entre um (não concordo) e cinco (concordo
totalmente). Existem duas questões de escolha múltipla e as restantes oito são de
resposta aberta. O questionário encontra-se dividido em cinco categorias. A
primeira relaciona-se com a clareza e objetividade da minha comunicação, pretendo
validar o meu estilo de comunicação. A segunda categoria diz respeito à motivação
e autonomia dos alunos, questionando-os ainda sobre as tarefas em que sentiram
mais ou menos dificuldades. A terceira pretende validar se os alunos ficaram a
entender o funcionamento dos subprogramas, bem como o conceito de array. Na
quarta categoria, os alunos são questionados sobre as potencialidades e limitações
dos robôs e plataforma online. Por último, na sexta categoria, encontram-se duas
questões que permitem aos alunos propor sugestões de alteração às atividades
realizadas.

46
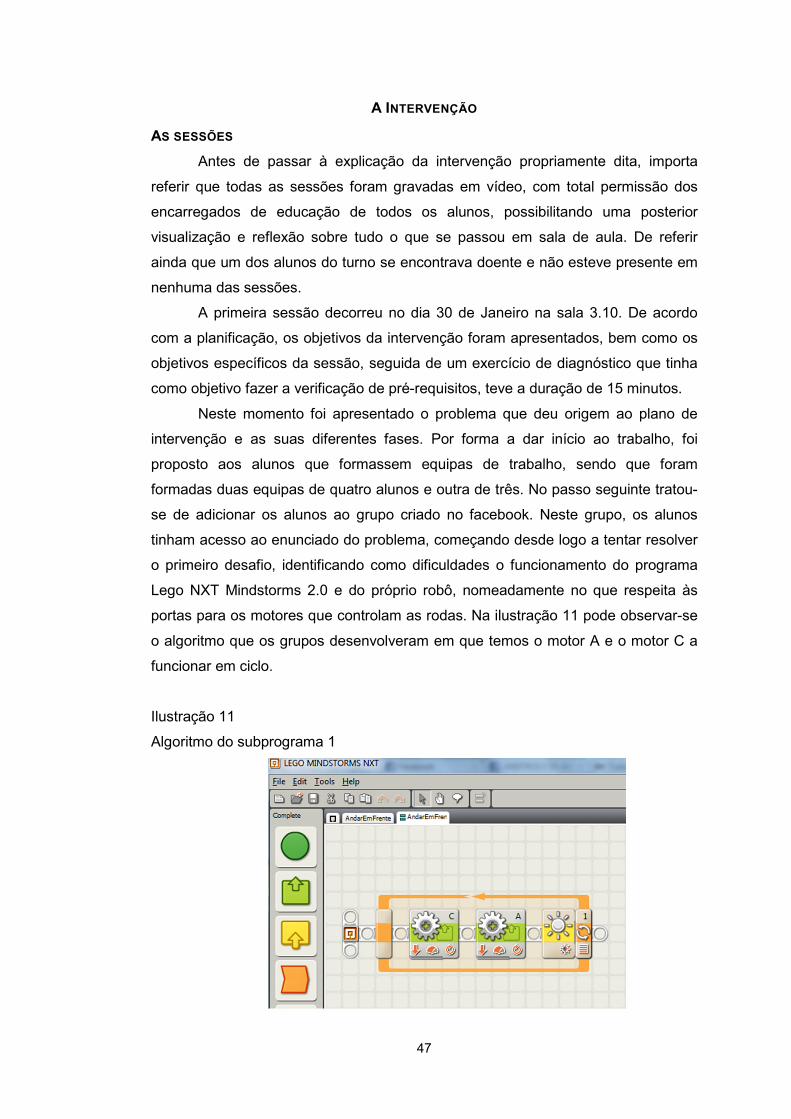
47
A INTERVENÇÃO
AS SESSÕES
Antes de passar à explicação da intervenção propriamente dita, importa
referir que todas as sessões foram gravadas em vídeo, com total permissão dos
encarregados de educação de todos os alunos, possibilitando uma posterior
visualização e reflexão sobre tudo o que se passou em sala de aula. De referir
ainda que um dos alunos do turno se encontrava doente e não esteve presente em
nenhuma das sessões.
A primeira sessão decorreu no dia 30 de Janeiro na sala 3.10. De acordo
com a planificação, os objetivos da intervenção foram apresentados, bem como os
objetivos específicos da sessão, seguida de um exercício de diagnóstico que tinha
como objetivo fazer a verificação de pré-requisitos, teve a duração de 15 minutos.
Neste momento foi apresentado o problema que deu origem ao plano de
intervenção e as suas diferentes fases. Por forma a dar início ao trabalho, foi
proposto aos alunos que formassem equipas de trabalho, sendo que foram
formadas duas equipas de quatro alunos e outra de três. No passo seguinte tratou-
se de adicionar os alunos ao grupo criado no facebook. Neste grupo, os alunos
tinham acesso ao enunciado do problema, começando desde logo a tentar resolver
o primeiro desafio, identificando como dificuldades o funcionamento do programa
Lego NXT Mindstorms 2.0 e do próprio robô, nomeadamente no que respeita às
portas para os motores que controlam as rodas. Na ilustração 11 pode observar-se
o algoritmo que os grupos desenvolveram em que temos o motor A e o motor C a
funcionar em ciclo.
Ilustração 11
Algoritmo do subprograma 1
48
No segundo desafio, todas as equipas demonstraram alguma dificuldade
face à programação das rotações de cada roda.
Com as dificuldades do primeiro e segundo desafios ultrapassadas, os
alunos passaram ao terceiro desafio, surgindo as primeiras complicações devidas à
utilização dos sensores de luminosidade.
As partilhas das reflexões e dos vídeos com as soluções dos desafios
permitem aos alunos consolidar os conhecimentos, bem como consultar as
partilhas efetuadas pelas restantes equipas, refletindo desta forma, pela própria
solução que encontraram. No início, os alunos apresentaram algumas reservas,
sendo que só após alguma insistência é que os alunos refletiram sobre as suas
soluções e partilharam os vídeos na plataforma.
De referir que um dos alunos no final da sessão, questionou acerca da
possibilidade de desmontar o robô, quando já tinha desmontado o sensor do robô,
revelando um comportamento de muita curiosidade e interesse em relação ao
mesmo.
Após o toque para o final da aula e após ter dado por concluída a aula, um
dos alunos prontamente respondeu “Não termina nada! Agora quero meter isto a
funcionar”, o que demonstra muito bem a motivação e vontade dos alunos perante
os robôs.
Este interesse e motivação acabou por ultrapassar as expectativas para a
primeira sessão, em que estava planeada a resolução do primeiro desafio, mas,
como já foi referido todas as equipas atingiram o terceiro.
A segunda aula decorreu na sala 3.11 no dia 31 de Janeiro. Os alunos
começaram por questionar como poderiam ter acesso ao software Lego NXT
Mindstorms 2.0 para poderem programar em casa, mostrando-se muito
interessados, tendo ainda referido que pesquisaram sobre estes robôs, tendo
encontrado exemplos de pessoas a comandar os robôs através de bluetooth e wi-fi.
Dando continuação ao trabalho efetuado na primeira sessão, as três equipas
deram seguimento à resolução de desafios. Assim sendo, os alunos, nas suas
reflexões apresentaram como principais dificuldades para a resolução do terceiro
desafio, a troca do sensor de luz pelo sensor de cor, os diferentes valores refletidos
pela cor branca e cor preta e ainda a instrução de paragem do ciclo.
Todas as equipas estavam a ter o problema de a cor branca e preta estar a
refletir valores bastante distintos, o que impossibilitava a programação correta do
robô. Foi necessário intervir, explicando às diferentes equipas que o facto do
parque de estacionamento não estar colado à mesa fazia com que o papel tivesse
algumas ondas, provocando alterações nos valores lidos pelo sensor. A solução
49
passou então pela colagem, com fita-cola, do parque de estacionamento às mesas.
Com as dificuldades do terceiro desafio ultrapassadas, o quarto foi resolvido com
relativa fluidez.
À medida que cada equipa foi atingindo o quinto desafio, era feita a
introdução à funcionalidade “MyBlocks” do software que possibilita a criação de
subprogramas, permitindo assim, através dos desafios anteriores, a criação de
subprogramas que serão úteis a partir deste quinto desafio.
A terceira sessão encontrava-se inicialmente planeada para o dia 2 de
Fevereiro, mas teve que sofrer um adiamento para o dia seguinte, devido à greve
de transportes públicos que provocou o encerramento da escola.
Esta aula aconteceu na sala 3.12 e devido a alguns constrangimentos com
os servidores da escola, os alunos não podiam fazer login nos computadores, o que
provocou alguns atrasos no início do trabalho dos alunos, sendo que a primeira
equipa começaram a trabalhar às oito horas e trinta minutos, a equipa dois apenas
começou às oito horas e cinquenta minutos e os alunos da terceira equipa
começaram a trabalhar às oito horas e cinquenta e cinco minutos.
Mesmo com estes constrangimentos, as equipas um e três conseguiram dar
por finalizados os desafios, sendo que a equipa três colocou o robô a resolver todo
o problema, mas movia-se aos solavancos e sem fazer uso da instrução
“MyBlocks”. Apenas a segunda equipa não conseguiu completar o último desafio.
Em relação ao quinto desafio, os alunos apresentaram dificuldades em
colocar o robô a mover-se para a frente de acordo com o número aleatório gerado,
tendo sido necessária a minha intervenção para ultrapassarem este desafio.
Surgiram entre os grupos dois algoritmos para resolver este desafio. O que se pode
ver na ilustração 12 gera um número aleatório que é enviado para um Switch que,
de acordo com esse valor recebido, invocava o subprograma um, enviando o
número de rotações que o robô deveria efetuar. O segundo algoritmo desenvolvido
encontra-se na ilustração 13, que é bem mais simples, contando com um bloco
para gerar um número aleatório, outro com uma constante (valor 1), um para fazer
o somatório entre a constante e o valor aleatório, invocando em seguida o
subprograma um.

50
Ilustração 12
Algoritmo 1 do subprograma 5
Ilustração 13
Algoritmo 2 do subprograma 5
A quarta aula decorreu no dia seis de Fevereiro na sala 3.10. Foi proposta
aos alunos a resolução de um desafio extra que consistia em fazer aparecer no
ecrã do robô as ações que ele ia fazendo, isto é, se o robô estivesse a estacionar
deveria aparecer no ecrã “A estacionar” ou se estivesse estacionado aparecia
“Clique no botão laranja para sair do estacionamento”. Os alunos aceitaram este
desafio com algum interesse dando logo início aos trabalhos.
No início desta aula repetiram-se os constrangimentos com os servidores da
escola, não conseguindo as equipas dois e três começar a trabalhar à hora
prevista.

51
A primeira equipa, por não guardar convenientemente o trabalho
desenvolvido nas sessões anteriores, teve que começar do início a resolução do
problema, tendo sido a única que não completou o desafio extra.
Relativamente ao desafio extra os alunos não revelaram qualquer
dificuldade em resolvê-lo, mas a solução não foi a mais indicada, pois nenhuma
equipa fez uso dos subprogramas através da instrução “MyBlocks”.
A quinta e última sessão decorreu no dia nove de Fevereiro na sala 3.11. No
início desta aula os alunos tiveram dez minutos para testar os robôs de modo a
colocar tudo funcional para a apresentação funcionar corretamente. Após
terminarem os testes, deu-se início às apresentações existindo, no geral, uma boa
coordenação entre os elementos das equipas, apresentando os aspetos que
consideraram mais relevantes da resolução do problema.
Um aspeto positivo das apresentações é que todos os grupos aprofundaram
a apresentação para além da resolução do problema, no entanto, apesar de dois
dos três grupos terem resolvido o desafio extra, nenhuma fez menção deste desafio
na apresentação.

52
AVALIAÇÃO Segundo a professora Patrícia Rosado Pinto da Universidade Nova de
Lisboa, avaliar é tecer juízos baseados em determinados critérios, verificando e
criticando cada um dos pontos.
De acordo com as estratégias de intervenção e de avaliação das
aprendizagens, os alunos resolveram um exercício que tinha o objetivo de verificar
o que sabiam (anexo E). Dois alunos apresentaram resultados claramente
negativos (zero valores), nove tiveram notas entre 11 e 12 e um aluno teve 16,5
valores.
As grelhas de registo de aula serviram os seus propósitos, permitiram
avaliar cada momento de cada sessão.
É de louvar o facto de durante as cinco sessões que, para além do aluno
que se encontrava doente, nenhum outro ter faltado e apenas um ter chegado
atrasado uma vez.
Verificou-se que durante as aulas, dois alunos não cumpriram os objetivos,
mantendo desde o início uma total falta de interesse, através de estratégias de
evitamento, tentando passar despercebidos. Este desinteresse foi diagnosticado
durante a primeira sessão e durante as sessões seguintes os alunos foram alvo de
uma maior atenção através de repetidas conversas, mas que não surtiram grande
efeito.
Na tabela abaixo, podem validar-se os resultados dos alunos ao longo das
quatro sessões, verificando-se que numa escala até 28 pontos, divididos por oito
critérios (anexo G), apenas dois alunos não conseguem resultados aceitáveis.
Tabela 12 Resultados da grelha de registo de aula
Aula 1 Aula 2 Aula 3 Aula 4 Média
Aluno 1 27 27 24 21 25,5
Aluno 2 24 25 25 24 24,5
Aluno 3 24 24 25 25 24,5
Aluno 4 24 15 15 15 15
Aluno 5 27 27 27 27 27
Aluno 6 24 25 25 24 24,5
Aluno 7 24 26 27 27 26,5
Aluno 8 22 15 16 15 15,5
Aluno 9 24 25 20 21 22,5
Aluno 10 24 26 24 21 24
Aluno 11 24 23 25 25 24,5

53
Para além da grelha de registo de aula, os alunos foram avaliados de acordo
com as interações que foram mantendo na plataforma. No que respeita à partilha
dos vídeos dos subprogramas, todas as equipas completaram esse critério. No que
diz respeito às reflexões sobre as soluções encontradas, os resultados são muito
bons, atestando que apenas a equipa dois podia ter apresentado um melhor
trabalho de reflexão.
Tabela 13 Resultados da grelha de avaliação das partilhas na plataforma
Partilha dos filmes
Reflexões Total
Equipa 1 2 4 6
Equipa 2 2 3 5
Equipa 3 2 4 6
O facto de ser um professor não titular da turma e esta ser uma estratégia
inovadora, na medida em que é muito diferente do que eles estavam habituados,
pode ajudar a justificar os resultados aquém do esperado para as interações na
plataforma.
Tabela 14 Resultados da grelha de avaliação individual das partilhas na plataforma
Interação na plataforma
Aluno 1 2
Aluno 2 3
Aluno 3 2
Aluno 4 1
Aluno 5 2
Aluno 6 3
Aluno 7 2
Aluno 8 1
Aluno 9 2
Aluno 10 2
Aluno 11 2
A apresentação foi alvo de avaliação com recurso às grelhas que se
encontram nos anexos J e K.
Os resultados obtidos pelos alunos na apresentação do problema foram
muito positivos, conseguindo todos os grupos explanar as suas ideias e
argumentações, revelando algum trabalho de pesquisa, expondo vídeos com os

54
robôs a resolverem os desafios e explicando como os resolveram indicando as
dificuldades que foram ultrapassando de uma forma organizada e com pouca leitura
direta da apresentação.
Tabela 15 Resultados da grelha de avaliação da apresentação
Organização
Clareza e
Objetividade
Capacidade
de suscitar
interesse
Suporte
audiovisual
Criatividade
Gestão do
tempo
Total
Equipa 1 3 3 3 3 3 4 19
Equipa 2 3 3 3 3 3 4 19
Equipa 3 3 4 4 4 4 4 23
A avaliação individual da apresentação revela que, com exceção de quatro
alunos, todos superaram as expectativas relativamente à apresentação. Dos
restantes quatro alunos, ainda que aquém das expectativas, dois atingiram os
objetivos, apesar de revelarem alguma falta de correção científica e de discurso, de
argumentação e lerem diretamente dos diapositivos, o que também se pode
explicar pela jovem idade dos alunos e por este tipo de apresentações não serem
muito trabalhadas nas práticas anteriores.
Tabela 16 Resultados da grelha de avaliação individual da apresentação
Participação
Correção
científica
Correção do
discurso
Apresentação
da informação
Argumentação
Postura
Contacto
visual
Voz
Total
Aluno 1 4 3 4 3 4 4 4 4 30
Aluno 2 4 3 4 3 4 4 4 4 30
Aluno 3 2 1 3 1 1 1 1 3 13
Aluno 4 4 4 4 3 4 4 4 4 31
Aluno 5 3 3 4 3 4 4 4 3 28
Aluno 6 3 2 2 2 2 3 4 2 20
Aluno 7 2 2 2 1 1 3 1 1 13
Aluno 8 4 4 4 4 4 4 4 4 32
Aluno 9 4 4 4 3 4 4 4 4 31 Aluno 10 4 4 4 3 4 4 4 4 31
Aluno 11 2 1 4 2 2 3 3 4 21

55
ANÁLISE DAS RESPOSTAS AO INQUÉRITO Analisando os resultados do inquérito apresentado aos alunos no final da
última aula, no que respeita à clareza e objetividade, todos os alunos concordam
que os objetivos da intervenção e de cada sessão tenham sido apresentados de
forma clara o objetiva, bem como concordam com o facto de o professor ter
procurado esclarecer todas as dúvidas e ter utilizado uma linguagem clara e
percetível.
Em relação à motivação e autonomia todos concordam que as aulas com
auxílio dos robôs são motivadoras e 91% dos alunos considera que realizou as
tarefas com autonomia. Quando questionados sobre as tarefas em que sentiram
mais e menos dificuldades, cerca de 53% das respostas revelaram que a utilização
dos sensores foi o que suscitou maiores dúvidas e 40% destacaram o primeiro
desafio como aquele que levantou menos problemas. Nas tabelas abaixo podem
validar-se estes resultados.
Tabela 17 Desafios em que os alunos sentiram mais dificuldades
Desafios Respostas Percentagem
1 3 23,08%
2 2 15,38%
3 7 53,85%
4 0 0%
5 1 7,69%
6 0 0%
Total 13 100%
Tabela 18 Desafios em que os alunos sentiram menos dificuldades
Desafios Respostas Percentagem
1 6 40,00%
2 3 20,00%
3 1 6,67%
4 3 20%
5 1 6,67%
6 1 6,67%
Total 15 100%
A categoria seguinte do questionário está relacionada com o ensino e
aprendizagem. Os resultados ficaram aquém do esperado, sendo que apenas 27%
dos alunos responderam corretamente quando questionados sobre para que
servem os subprogramas.

56
Ilustração 14
Utilização de subprogramas
Quando questionados sobre um exemplo de array aplicado ao mundo real,
82% dos alunos responderam corretamente.
Ilustração 15
Exemplo de array aplicado ao mundo real
No que respeita às potencialidades e limitações da utilização de robôs na
aprendizagem de subprogramas, os alunos apresentaram algumas dificuldades de
interpretação das questões e por conseguinte apresentaram respostas sem nexo.
Assim, cerca de 30% das respostas mencionam os robôs como um recurso útil que
torna as aulas interessantes.
Tabela 19
Potencialidades da utilização de robôs na aprendizagem de subprogramas
Respostas N.º de
Respostas Percentagem
Menor complexidade a programar 3 23,08%
Recurso lúdico que torna as aulas mais interessantes
4 30,77%
Não sabe 2 15,38%
Respostas sem nexo 4 30,77%
Total 13 100%

57
Quando questionado sobre as limitações, cerca de 27% responderam que
os robôs não apresentam qualquer limitação, cerca de 18% responderam que não
sabem, mas a maioria (aproximadamente 54%) exibiram respostas sem sentido.
Tabela 20
Limitações da utilização de robôs na aprendizagem de subprogramas
Respostas N.º de
Respostas Percentagem
Não tem limitações 3 27,27%
Não sabe 2 18,18%
Sem nexo 6 54,55%
Total 11 100%
Para além do recurso robô, os alunos foram também questionados sobre a
plataforma Facebook, que foi utilizada como espaço de partilha para os materiais,
questões e trabalho dos alunos. Cerca de 90% dos alunos respondeu positivamente
quando questionados sobre se a plataforma foi útil para a resolução do problema,
como se pode confirmar na tabela abaixo.
Tabela 21
Importância do Facebook como plataforma de partilha de informações na resolução
do problema
Respostas N.º de
respostas Percentagem
Sim 10 90,91% Não 1 9,09%
Total 11 100%
No seguimento da questão anterior, se concordassem com a importância da
plataforma, os alunos deveriam apresentar uma justificação. Assim, 90% dos
alunos considera o Facebook importante, uma vez que permite aceder a
informações fora do tempo de aula, permite partilhar informações de forma rápida e
fácil e é inovadora e permite divulgar o trabalho desenvolvido.

58
Tabela 22
Justificações para a importância do Facebook na resolução do problema
Respostas N.º de
respostas Percentagem
Permite aceder às informações fora das aulas 3 30% Forma fácil e rápida de partilhar informação 4 40% Forma inovadora e facilitadora de divulgar o trabalho efetuado
2 20%
Permite a reflexão sobre o trabalho efetuado 1 10% Total 10 100%
Quando questionados sobre a pertinência do Facebook ou outra plataforma
online na partilha de informações e questões das aulas, cerca de 81% dos alunos
responderam afirmativamente, sendo que cerca de 44% desses 81% apresentou
como justificação o facto de ser uma forma fácil e rápida para partilhar informação.
De referir que, analisando as respostas dos alunos, conclui-se que cingiram as suas
respostas à plataforma Facebook.
Tabela 23
Pertinência do Facebook ou outra plataforma online para partilha de informações e
questões das aulas
Respostas N.º de
respostas Percentagem
Sim 9 81,82%
Não 2 18,18%
Total 11 100%
Tabela 24
Justificações para a pertinência do Facebook ou outra plataforma online na partilha
de informações e questões das aulas
Respostas N.º de
respostas Percentagem
Forma fácil e rápida de partilhar informação 4 44,44% Forma inovadora e facilitadora de divulgar o trabalho efetuado
1 11,11%
Permite a reflexão sobre o trabalho efetuado 1 11,11% Não justificou 3 33,33%
Total 9 100%
O último conjunto de questões diz respeito às estratégias utilizadas durante
as cinco aulas. Aqui, todos os alunos afirmaram ter gostado das estratégias
utilizadas, apresentando diferentes justificações que vão desde o ter aprendido a
trabalhar com robôs, bom ambiente em sala, as aulas terem sido motivadoras,
59
diferentes, divertidas e lúdicas, terem entendido os conteúdos e terem sido bem
dadas. Acerca da questão sobre o que alteravam todos responderam que não
existem alterações a fazer, justificando com a liberdade que tiveram para
desenvolver trabalho autónomo.
A análise ao questionário permite concluir que o trabalho foi esclarecedor e
motivador para os alunos. Denotou-se um bom grau de autonomia na maioria dos
alunos. Em relação aos resultados apresentados relativamente à perceção dos
alunos sobre a utilização de subprogramas, pode concluir-se que, apesar dos
alunos estarem numa fase do módulo em que deveriam estar a consolidar
conhecimentos, ainda existiam muitas questões sobre o que são subprogramas e
para que servem. Estes resultados foram-se tornando, até certo ponto, esperados,
uma vez que os alunos, apesar da insistência e explicações diversas sobre as
vantagens de utilização da instrução “MyBlocks”, apresentaram algumas reservas,
olhando para a criação de subprogramas como uma obrigação e não como algo
que lhes permite poupar trabalho através da reutilização de código.
Para além da consolidação de conhecimentos sobre subprogramas, um dos
objetivos da intervenção contemplava a introdução ao conceito de array, que foi
feita através de uma explicação oral aproveitando o parque de estacionamento do
problema para contextualizar o conceito com o mundo real, uma vez que se trata de
uma estrutura de dados que permite guardar vários elementos de um mesmo tipo
de dados, em que cada um é acedido através de um índice (número inteiro). No
caso deste exemplo tínhamos um array com seis posições, em que, em cada lugar
(numerado), se pode colocar um robô (estacionar um carro), ou seja, neste caso
temos um array com 6 posições cujo tipo de dados é carro, podendo em
pseudocódigo ser descrito como carro[ ] parqueEstacionamento = new carro[6];.
Conclui-se então que 82% dos alunos compreenderam o conceito, sendo que os
restantes 18% apresentaram uma resposta que não está desprovida de razão, uma
vez que um tabuleiro de xadrez é um exemplo de um array de arrays, ou seja, uma
matriz.
Alguns alunos, ao responder às potencialidades e limitações, apresentaram
algumas limitações na interpretação da língua portuguesa, o que vai ao encontro da
caracterização inicial da turma. Ainda assim, pode concluir-se que cerca de 50%
dos alunos consideraram os robôs um recurso interessante.

60

61
REFLEXÃO
De acordo com Roldão (2010) “ensinamos porque essa é a função que nos
compete”. A este fenómeno denomina-se de naturalização, “que conduz à
ocultação do desconhecido no familiar” (Bourdieu e Passeron, 1970, citados por
Roldão, 2010).
A especificidade desta profissão obriga incessantemente a pôr em causa o
que se fez, o que se faz e o que se planeia fazer, renova as atividades levando-as
para “contextos de amplitude crescente e de cada vez maior complexidade”
(Godinho, V., 1971, citado por Roldão, 2010).
A análise dos resultados do exercício de diagnóstico, das grelhas de
avaliação e do questionário, possibilita, tal como referido na avaliação da
intervenção, a reflexão sobre as aprendizagens dos alunos, a adequação das
atividades planeadas tendo em conta o tipo de competências que se pretende que
os alunos trabalhem, processo, recursos utilizados e sobre o professor que sou e
que quero ser. Para além desta reflexão, permite ainda a resposta ao caráter
investigativo deste relatório, ou seja, às potencialidades e limitações da utilização
de robôs no ensino específico dos subprogramas.
Os resultados obtidos pelos alunos na resolução do exercício de diagnóstico
revelaram um grupo que, na sua generalidade apresenta notas que se podem
caracterizar como fracas. Comparando estes resultados com os resultados
positivos obtidos nas diferentes grelhas, verifica-se que a utilização de robôs em
sala de aula trouxe evidentes melhorias.
Embora em onze alunos se possam validar as potencialidades da robótica
educativa, dois alunos em nenhum momento tentaram sequer conhecer o
funcionamento dos robôs. Após conversa com a diretora de turma e professor
cooperante, foi referido que estas atitudes são extensíveis às restantes disciplinas.
Este tipo de comportamentos e atitudes pode explicar-se através da teoria da auto-
eficácia de Bandura, que diz que a confiança dos sujeitos na sua capacidade para
executar e conduzir uma ação para resolver um problema ou cumprir uma tarefa.
Relativamente ao questionário, devido à pouca idade dos alunos e ao facto
de ser uma amostra relativamente pequena, não foi possível obter respostas com o
grau de qualidade desejável.
A planificação inicial para a primeira sessão não correu exatamente como
era esperado, pois no final dessa aula os alunos já se encontravam a desenvolver o
terceiro desafio (previsto para a segunda sessão). Este desvio permitiu um novo
problema da minha parte, que consistiu no desenvolvimento de um novo desafio
para os alunos resolverem. Este tipo de problemas constantes é um bom exemplo

62
do “ensino adaptativo” (Miras, 1991, citado por Zabala, 1998), mencionado
anteriormente na página 18.
Durante todas as sessões foram levantadas questões que obrigaram os
alunos a pensar e a repensar as suas soluções, para além de reforços positivos em
determinados momentos, uma vez que, segundo o professor Francisco Peixoto do
Instituto Superior de Psicologia Aplicada, podem dar indicações importantes sobre
um determinado comportamento numa determinada circunstância.
Os recursos utilizados durante as aulas (robôs e facebook), conjugados com
estratégias inovadoras e as avaliações positivas dos alunos permitem concluir que
as atividades planeadas foram adequadas e ao encontro das competências que se
pretendiam que os alunos desenvolvessem, motivando a generalidade dos alunos
para o processo ensino/aprendizagem. Este tipo de conclusão pode ser retirada,
uma vez que a tarefa de estacionamento do robô potenciou o desenvolvimento de
diversos subprogramas, cada um com a sua rotina específica, permitindo aos
alunos trabalhar de forma prática consolidando e aplicando conhecimentos teóricos
anteriormente adquiridos, tornando percetível a sua necessidade de
desenvolvimento e utilização.
Cerca de 53% dos alunos referiram a menor complexidade a programar e o
facto de ser um recurso lúdico que torna as aulas interessantes como
potencialidades da utilização de robôs na aprendizagem de subprogramas.
O visionamento das gravações das sessões, para além da própria
observação em aula, permitiu validar determinadas potencialidades da robótica
educativa que alguns autores já tinham concluído, nomeadamente, a valorização do
trabalho cooperativo, uma melhoria significativa na postura perante novos
problemas e face ao erro e ainda o aumento na colaboração, motivação e sentido
crítico (Passerino e Possamai, 2004).
Tal como foi referido anteriormente, de acordo com Esteves et al. (2008),
programar é difícil porque exige um alto nível de abstração. Segundo Ferreira et al
(2010), a manipulação de robôs diminui esse nível de conceitos abstratos e, por
conseguinte, facilita a aprendizagem da programação.
Para além da conclusão anterior, as minhas observações permitem-me
aferir que o facto da linguagem ser composta por blocos e não compreender grande
complexidade ao nível da sintaxe também é um facilitador da aprendizagem da
programação.
No que respeita a limitações, cerca de 27% dos alunos não encontram
qualquer limitação e aproximadamente 18% menciona que não sabe se os robôs

63
apresentam limitações na aprendizagem de subprogramas. Os restantes
apresentaram respostas sem nexo.
Contudo, uma limitação clara é o facto do software não fazer distinção entre
funções e procedimentos, ou seja, o software permite apenas a criação de
procedimentos. Apesar disso, tendo em conta o tipo de trabalho que se pretendia
que os alunos realizassem, os procedimentos servem o efeito, consolidando nos
alunos conhecimentos no que respeita à utilização de subprogramas, ou seja, para
que servem, como se utilizam e como se desenvolvem.
Com base nos resultados obtidos, nomeadamente no que respeita à
utilização de subprogramas, na próxima vez em que seja utilizado este cenário e
estratégias, é proposta, após a realização do exercício de diagnóstico, uma
apresentação das vantagens de utilização de subprogramas como forma de
motivação ao trabalho seguinte. Esta exposição oral tem como objetivo tornar ainda
mais percetível a necessidade de desenvolvimento e utilização de subprogramas e
vem no seguimento das reservas que os alunos apresentaram ao tentarem evitar
utilizar a instrução “MyBlocks”, limitando-se a copiar, quando necessários, todos os
blocos criados em cada um dos desafios, bem como dos resultados do inquérito,
pois a maioria dos alunos não soube identificar para que servem os subprogramas.
Algo que também pode ser útil na consolidação de conhecimentos, no final do
trabalho, é o desenvolvimento de um relatório escrito em que os alunos reflitam
sobre os objetivos do projeto, processo e aprendizagens, complementando as
reflexões efetuadas na plataforma.
Tal como referido no relatório final da cadeira de Introdução à Prática
Profissional Três para a preparação da Introdução à Prática Supervisionada, tendo
em conta a especificidade da didática da informática, o tipo de professor que
pretendo vir a ser, é alguém que questiona repetidamente, orientando os alunos
numa procura pelo conhecimento, através de atividades inovadoras, práticas e
contextualizadas, avaliando de uma forma contínua, estimulando a tentativa e erro.
Este é um objetivo que durante as cinco sessões foi cumprido através das
atividades planeadas para os alunos bem como através do contínuo
questionamento das soluções dos alunos.
Enquanto profissional, encontro-me de momento como coordenador do
curso profissional de Gestão e Programação de Sistemas Informáticos na escola
profissional Bento de Jesus Caraça. Uma das minhas funções consiste no
planeamento de todo o curso. Irei manter uma ligação ao Mestrado em Ensino
através de uma parceria com o Instituto de Educação, promovendo, desta forma, o
meu desenvolvimento profissional. Assim, é, desde já, proposto um futuro trabalho

64
de investigação que compreende a planificação do curso através de projetos
interdisciplinares e intermodulares, tornando o curso mais prático e contextualizado.

65
ANEXO A – MÓDULOS DE CARÁTER OBRIGATÓRIO
N.º Designação Duração
(horas)
1 Introdução à Programação e Algoritmia 36
2 Mecanismos de Controlo de Execução 36
3 Programação Estruturada 36
4 Estruturas de Dados Estáticas 30
5 Estruturas de Dados Compostas 30
6 Estruturas de Dados Dinâmicas 36
7 Tratamento de Ficheiros 30
8 Conceitos Avançados de Programação 18
9 Introdução à Programação Orientada a Objetos 36
10 Programação Orientada a Objetos 36
11 Programação Orientada a Objetos Avançada 30
12 Introdução aos Sistemas de Informação 21
13 Técnicas de Modelação de Dados 36
14 Linguagem de Manipulação de Dados 36
15 Linguagem de Definição de Dados 21
16 Projeto de Software 74
17 Tema opcional 30
18 Tema opcional 30
19 Tema opcional 30

66
ANEXO B – MÓDULOS DE CARÁTER OPCIONAL
N.º Designação Duração
(horas)
Op1 Tecnologias de Acesso a Bases de Dados 30
Op2 Técnicas de Deteção e Tratamento de Erros 30
Op3 Metodologias de Análise e Desenvolvimento de Sistemas 30
Op4 Conceitos de Organização e Gestão de Empresas 30
Op5 Ferramentas de Desenvolvimento de Páginas Web 30
Op6 Ferramentas de Animação Gráfica 30
Op7 Ferramentas de Tratamento de Imagem 30
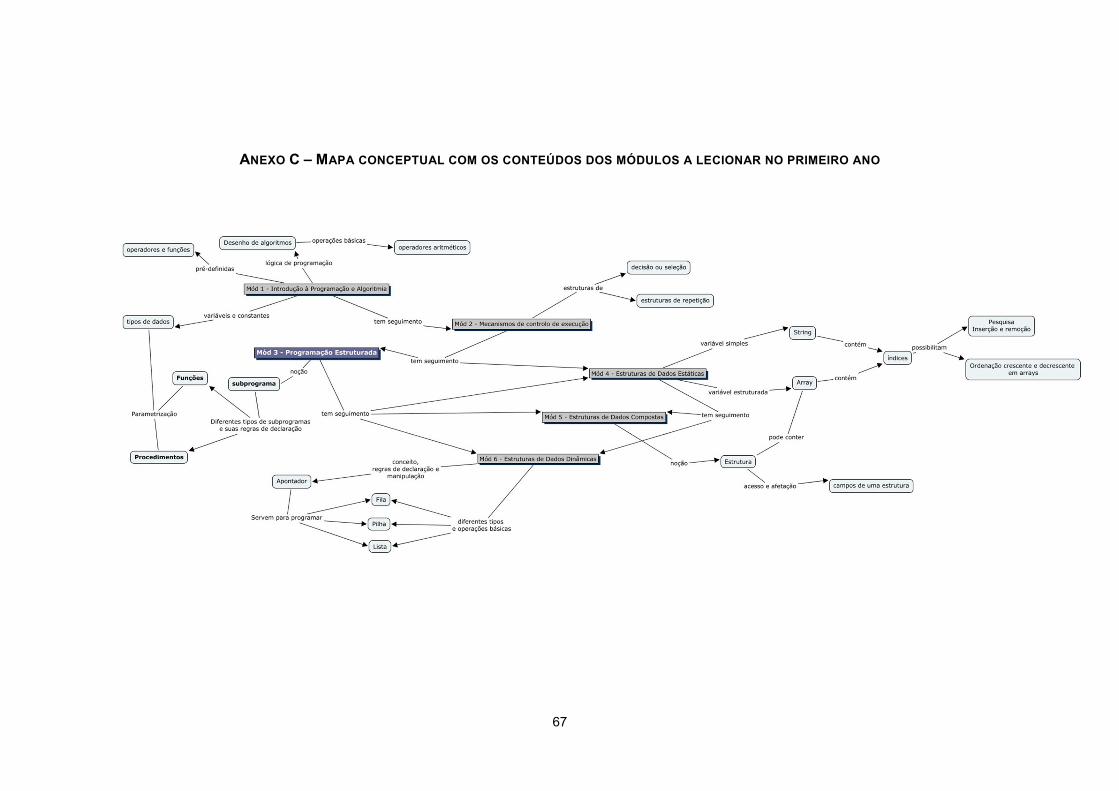
67
ANEXO C – MAPA CONCEPTUAL COM OS CONTEÚDOS DOS MÓDULOS A LECIONAR NO PRIMEIRO ANO

68

69
ANEXO D – CENÁRIO PARKING SPACE

70
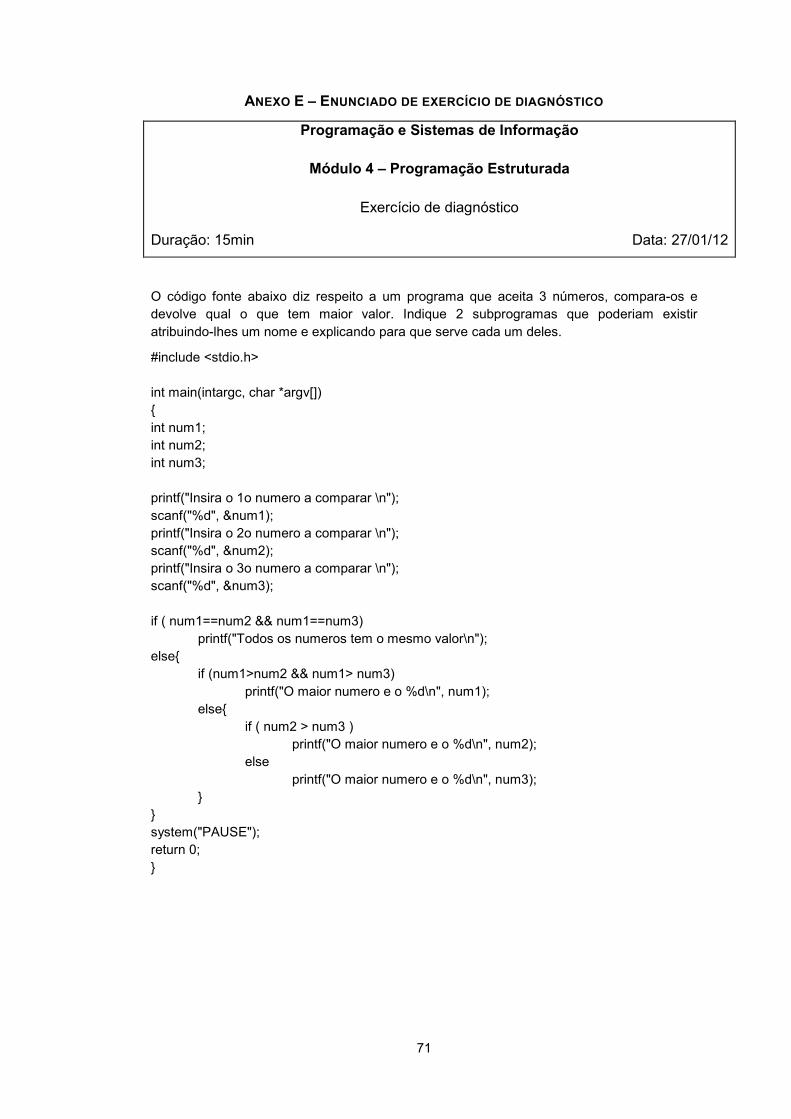
71
ANEXO E – ENUNCIADO DE EXERCÍCIO DE DIAGNÓSTICO
Programação e Sistemas de Informação
Módulo 4 – Programação Estruturada
Exercício de diagnóstico
Duração: 15min Data: 27/01/12
O código fonte abaixo diz respeito a um programa que aceita 3 números, compara-os e devolve qual o que tem maior valor. Indique 2 subprogramas que poderiam existir atribuindo-lhes um nome e explicando para que serve cada um deles.
#include <stdio.h> int main(intargc, char *argv[]) { int num1; int num2; int num3; printf("Insira o 1o numero a comparar \n"); scanf("%d", &num1); printf("Insira o 2o numero a comparar \n"); scanf("%d", &num2); printf("Insira o 3o numero a comparar \n"); scanf("%d", &num3); if ( num1==num2 && num1==num3)
printf("Todos os numeros tem o mesmo valor\n"); else{
if (num1>num2 && num1> num3) printf("O maior numero e o %d\n", num1);
else{ if ( num2 > num3 )
printf("O maior numero e o %d\n", num2); else
printf("O maior numero e o %d\n", num3); }
} system("PAUSE"); return 0; }

72
Nome do primeiro subprograma _________________________________________________________________________
Explicação ___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Nome do segundo subprograma _________________________________________________________________________
Explicação
___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Critérios
Critérios Cotação
1 Identificar subprograma que pergunta o número 3
2 Explicar o que faz o subprograma que pergunta o número 5
3 Identificar subprograma que devolve o maior número 5
4 Explicar o que faz o subprograma que devolve o maior número 7
Total 20

73
Anexo F – Enunciado do problema
Programação e Sistemas de Informação
Módulo 4 – Programação Estruturada
Enunciado do Problema
Duração: 4 x 90min Data: 27/01/12
Neste parque de estacionamento, o condutor
deixa o carro à entrada do parque e a partir daí o
veículo segue sozinho. É-lhe atribuído um lugar
de estacionamento (gerado aleatoriamente pelo
robô), deslocando-se autonomamente até ao seu
lugar.
Aí, ficará a aguardar pelo sinal que o condutor pretende sair (toque no botão laranja) e,
assim que o receber, deslocar-se-á até à saída do parque.
Para auxiliar o grupo a chegar ao produto final, devem completar os seguintes desafios:
1. Andar em frente uma rotação; 2. Rodar 90º à direita; 3. Andar para a frente até detetar a cor verde no chão; 4. Andar para a frente até detetar a cor vermelha no chão; 5. Gerar um número aleatório entre 0 e 5 e andar para a frente uma rotação a mais do
que o número gerado. Exemplo: Se o número gerado for o 0 (zero) o robô andará para a frente 1 rotação. Se for 2 o robô andará para a frente 3 rotações;
6. Após um clique no botão laranja, sai do estacionamento em marcha-atrás.
No final de cada um dos desafios devem filmar o robô a resolver o subprograma bem como
refletir em grupo sobre as dificuldades encontradas durante o processo e como as
resolveram.
Ao completarem os desafios devem utilizá-los conjugando-os por forma a chegar à
resolução do problema inicial.
Recursos:
• Parque de estacionamento;
• Robô com sensores de luz;
• 2 computadores com acesso à internet e software NXT;
• Telemóvel com câmara digital;
• Plataforma online.

74
Links de ajuda
• http://www.nxtprograms.com/help/MyBlocks/tutorial.html • http://www.ortop.org/NXT_Tutorial/index.html
Critérios de avaliação
Critérios Cotação
1 subprograma 1 1
2 subprograma 2 2
3 subprograma 3 2
4 subprograma 4 2
5 subprograma 5 2
6 subprograma 6 3
7 programa final usando os subprogramas
7.1 Cada subprograma 0,5 x 6
7.2 programa final 2
8 Apresentação e Discussão 3
Total 20

75
Anexo G – Grelha de registo de aula
1 2 3 4 Pontos
Assiduidade Não Assíduo. Assíduo. __/ 2 Pontualidade Não Pontual. Pontual. __/ 2 Desempenho de tarefas
Não desempenha nenhuma das tarefas que lhe foram atribuídas, tendo os seus colegas que realizar a sua parte.
Raramente desempenha as tarefas que lhe foram atribuídas; precisa, frequentemente, que lhe recordem os seus deveres.
Normalmente, cumpre o seu trabalho – raramente precisa que lhe recordem os seus deveres.
Cumpre sempre as suas tarefas sem precisar que lhe recordem os seus deveres
__/ 4
Contribuições pessoais
Raramente apresenta ideias úteis durante o trabalho de grupo ou a discussão com a turma. Pode recusar-se a trabalhar.
Apresenta algumas ideias úteis durante o trabalho de grupo ou a discussão com a turma. Nunca se recusa a trabalhar.
Apresenta ideias úteis durante o trabalho de grupo ou discussão com a turma. Esforça-se no seu trabalho.
Apresenta ideias úteis durante o trabalho de grupo ou discussão com a turma e estimula a participação dos seus colegas. Contribui decisivamente para o sucesso do trabalho.
__/ 4
Tipo de interação verbal
Está sempre a falar e não permite que mais ninguém fale.
Está quase sempre a falar e raramente permite que mais alguém fale.
Ouve, mas por vezes fala demasiado.
Ouve e fala de forma equilibrada. __/ 4
Resolução de conflitos
Tem conflitos frequentes com os seus colegas.
Raramente tem conflitos com os seus colegas de grupo.
Nunca tem conflitos com os seus colegas de grupo.
Nunca tem conflitos com os seus colegas de grupo e contribui ativamente para os prevenir e resolver.
__/ 4
Tomada de decisões
Não tenta resolver os problemas nem ajuda os seus colegas a resolvê-los. Os outros que trabalhem.
Não sugere nem melhora soluções, mas está disposto a experimentar as soluções propostas pelos seus colegas.
Melhora as soluções apresentadas pelos seus colegas.
Procura ativamente e propõe soluções para os problemas em causa.
__/ 4
Gestão do tempo
Não conclui as tarefas solicitadas dentro do prazo estipulado e o grupo tem que adiar a entrega do trabalho.
Tende a adiar a conclusão das suas tarefas. O grupo não tem que adiar a entrega do trabalho mas a qualidade do mesmo é afetada pelo seu comportamento.
Tende a adiar a conclusão das suas tarefas mas consegue cumprir os prazos. O grupo não tem que adiar a entrega do trabalho.
Gere bem o tempo e assegura a conclusão das suas tarefas dentro do prazo. __/ 4
Total __/ 28
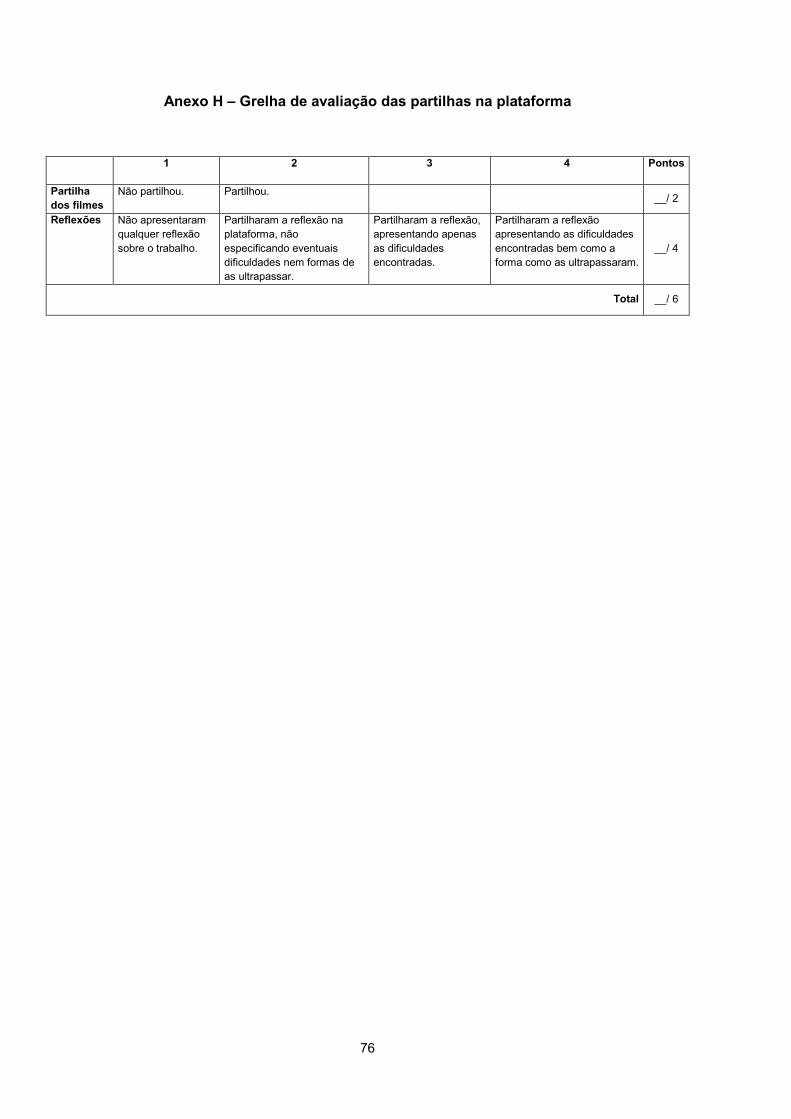
76
Anexo H – Grelha de avaliação das partilhas na plataforma
1 2 3 4 Pontos
Partilha dos filmes
Não partilhou. Partilhou. __/ 2
Reflexões Não apresentaram qualquer reflexão sobre o trabalho.
Partilharam a reflexão na plataforma, não especificando eventuais dificuldades nem formas de as ultrapassar.
Partilharam a reflexão, apresentando apenas as dificuldades encontradas.
Partilharam a reflexão apresentando as dificuldades encontradas bem como a forma como as ultrapassaram.
__/ 4
Total __/ 6

77
ANEXO I – GRELHA DE AVALIAÇÃO INDIVIDUAL DAS PARTILHAS NA PLATAFORMA
1 2 3 4 Pontos
Interação na plataforma
Não teve qualquer tipo de interação na plataforma.
Apenas colocou na plataforma a partilha obrigatória em aula.
Colocou questões na plataforma, mas não deu feedback a nenhum colega.
Promoveu a interação entre a turma e deu feedback aos colegas.
__/ 4
Total __/ 4

78
ANEXO J – GRELHA DE AVALIAÇÃO DA APRESENTAÇÃO
1 2 3 4 Pontos
Organização Não existiu qualquer articulação entre os vários elementos do grupo; Apresentação desorganizada.
Fraca articulação entre os vários elementos do grupo. Torna-se evidente que alguns deles não prepararam a apresentação.
Boa articulação entre a maioria dos elementos do grupo. Contudo, um dos elementos não preparou a apresentação com os restantes.
Excelente articulação entre os vários elementos do grupo; Apresentação lógica e extremamente bem organizada.
__/ 4
Clareza e objetividade
Exposição pouco clara, pouco objetiva e sem evidenciação dos aspetos fundamentais
Exposição clara, mas pouco objetiva; Foram apresentados muitos aspetos supérfluos.
Exposição clara, mas com alguns aspetos supérfluos.
Exposição clara, objetiva e com evidenciação dos aspetos fundamentais.
__/ 4
Capacidade de suscitar interesse
Apresentação com percalços e ineficaz na captação da atenção ou do interesse da audiência.
Apresentação com alguns percalços e nem sempre eficaz na captação da atenção e do interesse da audiência.
Apresentação com alguns percalços mas eficaz na captação da atenção e do interesse da audiência.
Apresentação bem ensaiada, sem percalços e eficaz na captação da atenção e do interesse da audiência.
__/ 4
Suporte audiovisual
Não utiliza qualquer elemento audiovisual para apoiar ou realçar o conteúdo da apresentação (imagens, esquemas/gráficos, vídeos).
Utiliza alguns elementos audiovisuais de fraca qualidade.
Utiliza elementos audiovisuais de qualidade mas não os explora adequadamente.
Utiliza elementos audiovisuais de grande qualidade para apoiar ou realçar o conteúdo da apresentação (imagens, esquemas/gráficos, vídeos).
__/ 4
Criatividade
Apresentação nada criativa tanto ao nível da metodologia como dos materiais utilizados.
Apresentação pouco criativa ao nível da metodologia e dos materiais utilizados.
Apresentação com vários aspetos criativos ao nível da metodologia e dos materiais utilizados.
Apresentação extremamente criativa tanto ao nível da metodologia como dos materiais utilizados.
__/ 4
Gestão do tempo
A apresentação não foi concluída por ter ultrapassado excessivamente o período temporal que lhe estava destinado.
A apresentação ultrapassa consideravelmente o período temporal que lhe estava destinado.
A apresentação ultrapassa ligeiramente o período temporal que lhe estava destinado.
Ótima gestão do tempo disponível.
__/ 4
Total __/ 24

79
ANEXO K – GRELHA DE AVALIAÇÃO INDIVIDUAL NA APRESENTAÇÃO
1 2 3 4 Pontos
Participação Não participa na apresentação.
Participa na apresentação com relutância.
Participa razoavelmente na apresentação.
Participa ativamente na apresentação. __/ 4
Correção científica
Apresentação com várias incorreções ao nível dos conceitos ou das informações.
Apresentação com 1 ou 2 incorreções ao nível dos conceitos ou das informações.
Apresentação sem qualquer incorreção ao nível dos conceitos ou das informações.
Apresentação reveladora de um excelente domínio de conceitos e informações.
__/ 4
Correção do discurso
Dificuldade de discurso e incorreções gramaticais ou de pronúncia.
Lapsos gramaticais e dificuldades de pronúncia.
Discurso razoavelmente bem articulado e sem incorreções gramaticais ou de pronúncia.
Discurso muito bem articulado e sem incorreções gramaticais ou de pronúncia.
__/ 4
Apresentação da informação
A informação foi lida em vez de ser apresentada.
A maior parte da informação foi lida em vez de ser apresentada.
A informação foi apresentada mas acompanhada da leitura de algumas notas.
A informação foi apresentada e não lida.
__/ 4
Argumentação Não estava suficientemente preparado para defender aspetos do seu trabalho; Não possuía os conhecimentos ou as capacidades necessárias.
Conhecimento deficiente do conteúdo do seu trabalho ou foi incapaz de argumentar.
Revelou um bom conhecimento do conteúdo do seu trabalho e boas capacidades de argumentação.
Revelou um conhecimento profundo do conteúdo do seu trabalho e excelentes capacidades de argumentação.
__/ 4
Postura Atitude desleixada. Atitude algo desleixada.
Boa postura Excelente postura __/ 4
Contacto visual Dirige a sua apresentação para o chão ou para o teto; não mantém contacto visual com a audiência.
Dirige-se algumas vezes à audiência; mantém contacto visual ocasional.
Dirige a sua apresentação maioritariamente para a audiência; mantém contacto visual frequente.
Dirige a sua apresentação para a audiência; mantém contacto visual constante.
__/ 4
Voz Discurso inaudível. Discurso com grandes oscilações no volume de voz.
Discurso audível durante a maior parte da apresentação.
Discurso audível durante toda a apresentação.
__/ 4
Total __/ 32

80
ANEXO L – QUESTIONÁRIO
Este questionário tem como objetivo a avaliação e análise da intervenção do professor Fábio Varanda, no âmbito do Mestrado em Ensino da Informática. Neste inquérito não existe lugar para a identificação pelo que será garantido o anonimato. Não coloques a tua identificação em nenhum local. Para cada questão, seleciona a opção que melhor expressa a tua opinião pessoal, utilizando, nas primeiras seis questões a escala de Likert entre 1 (não concordo) e 5 (concordo totalmente), a nove e dez são de escolha múltipla e as restantes perguntas de resposta aberta. Clareza e objetividade
1. Os objetivos da intervenção foram apresentados de forma clara e objetiva. 2. Em cada sessão, o professor apresentou os objetivos de forma clara e objetiva. 3. O professor procurou esclarecer as dúvidas. 4. O professor utilizou uma linguagem clara e percetível.
Motivação e autonomia
5. As aulas com auxílio dos robôs são motivadoras. 6. Realizaste com autonomia as tarefas apresentadas. 7. Qual ou quais as tarefas em que sentiste mais dificuldades? 8. Qual ou quais as tarefas em que sentiste menos dificuldades?
Ensino e aprendizagem
9. A utilização de subprogramas serve para a. Poupar memória b. Reutilizar código c. Nada d. Resolver problemas simples de forma complexa
10. Dos seguintes qual diz respeito a um exemplo de array aplicado ao mundo real? a. Tabuleiro de xadrez b. Um conjunto de maçãs c. O teclado de um computador d. Fila de lugares de um cinema
Recursos
11. Na tua opinião quais as potencialidades da utilização dos robôs na aprendizagem de subprogramas?
12. Na tua opinião quais as limitações da utilização dos robôs na aprendizagem de subprogramas?
13. A utilização do facebook como plataforma de partilha de informações e questões foi importante para a resolução do problema? Se sim, porquê?
14. Consideras pertinente utilizar o facebook ou outra plataforma online como plataforma de partilha de informações e questões das aulas? Se sim, porquê?
Estratégias
15. Gostaste das estratégias utilizadas durante as cinco aulas? Porquê? 16. O que alterarias nas estratégias utilizadas durante as cinco aulas?
Disponível em
https://docs.google.com/spreadsheet/viewform?formkey=dDVuTlFxa21jaWxVUTZuMHFSaDVwYnc6MQ

81
REFERÊNCIAS
Abreu, C. & Loureiro, C. (2007). Aprendizagem por Resolução de Problemas – Uma
experiência pluridisciplinar e multicultural. Revista Referência n.°5, 7-15. Retirado de
http://www.esenfc.pt/rr/admin/conteudos/downloadArtigo.php?id_ficheiro=4&codigo
Almeida, L., Filipe, A., Guedes, M., Lourenço, J., & Moreira, A. (2007). Bolonha. Ensino e
Aprendizagem por Projeto. Centro Atlântico.
Alves, M. (s/d). Metodologia da aprendizagem baseada em problemas. Retirado de
http://www.uel.br/pessoal/moises/Arquivos/APRENDIZAGEMBASEADAEMPROBLEMAS.pd
f
Azul, A. (2010). Programação e Sistemas de Informação. Porto Editora
Benitti, F., Halma, A., Krueger, M., Urban, D., & Vahldick, A. (s/d). Experimentação com
Robótica Educativa no Ensino Médio: ambiente, atividades e resultados. Retirado de
http://robolab.inf.furb.br/robolab/artigos/robolab/wie2009.pdf
Birzéa, C. (1986). Operacionalizar os objetivos pedagógicos. Coimbra Editora
Carvalho, A. (2010). Práticas de C#: Algoritmia e Programação Estruturada. FCA Editora
Censos - Resultados preliminares - 2011. Retirado de
http://censos.ine.pt/xportal/xmain?xpid=CENSOS&xpgid=ine_censos_publicacao_det&conte
xto=pu&PUBLICACOESpub_boui=122103956&PUBLICACOESmodo=2&selTab=tab1&pcen
sos=61969554
CIF - Classificação Internacional da Funcionalidade: Avaliação e Intervenção. Retirado de
http://www.iscia.edu.pt/paginas/index.php?nIDPagina=183
Decreto-Lei n.º 43/2007. Retirado de
http://www.ul.pt/pls/portal/docs/1/296220.PDF
Decreto-Lei n.º 3/2008. Retirado de
dre.pt/pdf1s/2008/01/00400/0015400164.pdf
Direção-Geral de Formação Vocacional (2005). Programa da disciplina de Programação de
Sistemas de Informação. Retirado de http://www.sitio.anq.gov.pt/programas%5Ci007510.pdf

82
Esteves, M., Fonseca, B., Martins, P., & Morgado, L. (2008, julho). Uso do Second Life em
Comunidade Prática de Programação. PRISMA.COM n.º6, 19-31. Retirado de
http://prisma.cetac.up.pt/19_Uso_Secon_Life_em_Comunidade_Pratica_Programacao_Mica
ela_Esteves_et_al.pdf
Faria, E. (2006). O professor e as novas tecnologias. Retirado de
http://aprendentes.pbworks.com/f/prof_e_a_tecnol_5[1].pdf
Ferreira, F., Veruggio, G., Micheli, E., & Operto, F. (2010). The Proliferation of Educational
Robotics. I Encontro Internacional TIC e Educação, pp. 975-980.
Galvão, C., Reis, P., Freire, A.,& Oliveira, T. (2006). Avaliação de competências em
ciências: Sugestões para professores do ensino básico e do ensino secundário. Lisboa:
ASA
Gaspar, L. (2007). Os robôs nas aulas de informática: plataformas e problemas. Tese
Submetida à Universidade da Madeira para a obtenção do grau de mestre em Engenharia
informática, Funchal.
Gomes, A. & Mendes, A. (2007).Learning to program – dificulties and solutions. Engineering
Education. Retirado de http://www.ineer.org/Events/ICEE2007/papers/411.pdf
Gomes, A., Henriques, J., & Mendes, A. (2008, maio). Uma proposta para ajudar alunos
com dificuldades na aprendizagem inicial de programação de computadores. Educação,
Formação & Tecnologias, Vol. 1, 93-103. Retirado de
http://www.moodle.ufba.br/file.php/8936/Revistas/Uma_proposta_para_ajudar_alunos_com_
dificuldades_na_aprendizagem_inicial_de.pdf
Gonçalves, J. & Nunes, M. (2005). Estilos de investigação: estudos quasi-experimentais.
Retirado de
http://www.educ.fc.ul.pt/docentes/ichagas/mi1/jabilioteresanunesestquasiexperimentais.pdf
Historial da escola D. Pedro V. Retirado de
http://www.jf-nsfatima.pt/boletins/bol08/page07.asp
História da Junta de Freguesia de Nossa Senhora de Fátima. Retirado de
http://www.jf-nsfatima.pt/boletins/bol04/page06.asp
Kolmos, A. Kuru, S., Hansen, H.,Eskil, T., Podesta, L., Flemming, F., Graaf, E., Wolff, J., &
Soylu, A. (2007). Problem Based Learning. Retirado de http://www.unifi.it/tree/dl/oc/b5.pdf
83
Lamim, J. (2008, 27 de Novembro). O que é programação de computadores [Web log post].
Retirado de
http://www.oficinadanet.com.br/artigo/1310/o_que_e_programacao_de_computadores
Oferta Curricular da Escola Secundária D. Pedro V. Retirado de
http://www.dpedrov.edu.pt/index.php?option=com_content&view=article&id=52&Itemid=60
Oferta curricular 2011/2012. Retirado de
http://www.dpedrov.edu.pt/index.php?option=com_content&view=article&id=52&Itemid=60
Passerino, L. & Possamai, C. (2004). O processo de Cooperação e resolução de problemas
apoiado pela robótica educativa com adolescentes. In: VII Congresso Iberoamericano de
Informática Educativa, Monterrey, México. Retirado de
http://www.niee.ufrgs.br/eventos/RIBIE/2004/posters/poster1324-1333.pdf
Pásztor, A., Pap-Szigeti, R., & Török, E. (2010). Effects of Using Model Robots in the
Education of Programming. Informatics in Education Vol. 9, No. 1, 133–140. Retirado de
http://www.mii.lt/informatics_in_education/pdf/INFE159.pdf
Portaria n.º 1189/2010. Retirado de
http://www.dges.mctes.pt/NR/rdonlyres/84F15CC8-5CE1-4D50-93CF-
C56752370C8F/5934/Portaria11892010.pdf
Programa Modernização das Escolas Secundárias. Retirado de
http://www.parque-escolar.pt/escola-dom-pedro-v.php
Projeto Curricular de Escola 2009/2013. Retirado de
http://www.dpedrov.edu.pt/material/PCE2009_2013.pdf
Projeto Educativo de Escola 2009/2013. Retirado de
http://www.dpedrov.edu.pt/material/projecto_educativo.pdf
Ribeiro, C., Coutinho, C., & Costa, F. (2007). Robô carochinha: um estudo sobre robótica
educativa no ensino básico. V Conferência Internacional de Tecnologias de Informação e
Comunicação na Educação, pp. 210-223. Retirado de
http://repositorium.sdum.uminho.pt/bitstream/1822/6516/1/109.pdf

84
Ribeiro, C., Coutinho, C.,& Costa, F. (2009). O papel interdisciplinar da robótica nos contos
infantis. VI Conferência Internacional de Tecnologias de Informação e Comunicação na
Educação, pp. 179-191. Retirado de
http://repositorium.sdum.uminho.pt/bitstream/1822/9439/1/robotica.pdf
Roldão, M. (2010). Estratégias de ensino: o saber e o agir do professor. Fundação Manuel
Leão
Santos, L. (2003). Avaliar competências: uma tarefa impossível?. Retirado de
http://www.educ.fc.ul.pt/docentes/msantos/Comp.pdf
Santos, L. (2008). Dilemas e desafios da avaliação reguladora. Retirado de
http://www.educ.fc.ul.pt/docentes/msantos/2007.pdf
Thompson C. (2010). We’re All Coders Now - Writing software shouldn’t be just for
engineers—it can be as easy as ABC. Wired. Retirado de
http://www.wired.com/images_blogs/magazine/2010/11/18.12ST.thompson.pdf
Winslow, L. (1996). Programming Pedagogy -- A Psychological Overview. SIGCSE
BULLETIN, Vol. 28, pp. 17-25.
Wu, C., Tseng, I., & Huang, H. (2008). Visualization of Program Behaviors: Physical Robots
Versus Robot Simulators. Retirado de
http://ir.lib.ntnu.edu.tw/ir/retrieve/21557/metadata_0111005_02_003.pdf
Zabala, A. (1998). A Prática Educativa: como ensinar. Artmed