
Universidade do Minho Escola de Engenharia Nelson John...
84
Universidade do Minho Escola de Engenharia Nelson John Silva Vieira Conceção, Modelação e Fabrico de um Sensor de Pressão Flexível Capacitivo Dissertação de Mestrado Mestrado Integrado em Engenharia Eletrónica Industrial e Computadores Trabalho realizado sob a orientação do Professor Doutor Luís Alexandre Rocha Outubro de 2012
Transcript of Universidade do Minho Escola de Engenharia Nelson John...

Universidade do Minho Escola de Engenharia
Nelson John Silva Vieira Conceção, Modelação e Fabrico de um Sensor de Pressão Flexível Capacitivo
Dissertação de Mestrado Mestrado Integrado em Engenharia Eletrónica Industrial e Computadores Trabalho realizado sob a orientação do Professor Doutor Luís Alexandre Rocha
Outubro de 2012

É AUTORIZADA A REPRODUÇÃO INTEGRAL DESTA DISSERTAÇÃO APENAS PARA EFEITOS DE
INVESTIGAÇÃO, MEDIANTE AUTORIZAÇÃO ESCRITA DO INTERESSADO, QUE A TAL SE
COMPROMETE.
Universidade do Minho, ____/____/____
__________________________________

iii
“An investment in knowledge pays the best interest.”
Benjamin Franklin

iv
v
Agradecimentos
Em primeiro lugar, gostaria de agradecer aos meus pais, por tudo que me deram ao
longo da vida e sem eles, nada disto seria possível. Todos os seus sacrifícios, os conselhos e
motivações contribuíram para que alcançasse todos os meus objetivos.
Aos meus irmãos, Manuel e Elizabeth, pela ajuda que me têm dado ao longo da vida e
por estarem presentes nos momentos em que mais precisei deles.
Um muito obrigado ao meu orientador, o Professor Luís Alexandre Rocha, pela constante
disponibilidade, pelo apoio, pelos seus conselhos e sugestões.
Um obrigado ao Paulo e à Sílvia, do Departamento de Polímeros pela ajuda que me
deram na execução do plano experimental do trabalho.
Quero agradecer também a todos os docentes que me acompanharam ao longo do
percurso universitário, pois a contribuição deles foi fundamental para o sucesso da minha
formação académica.
Um grande obrigado a todas as pessoas com as quais criei grandes amizades ao longo
destes últimos anos, e principalmente aos meus amigos, Aníbal e Mike, que me acompanharam
ao longo do curso nos estudos, na diversão e por estarem sempre disponíveis para ajudar um
amigo.
Este trabalho é cofinanciado por fundos FEDER através do Programa Operacional
Fatores de competitividade-COMPETE através do projeto TICE-Healthy – QREN SI&IDT projetos
mobilizadores.

vi

vii
Resumo
Os sensores de pressão flexíveis são usados num grande número de aplicações em
diversas áreas. Devido à natureza irregular das superfícies envolvidas, este tipo de sensores
oferecem uma solução para a medição de pressão entre duas superfícies de contacto.
O objetivo deste trabalho era a construção de um conjunto matriz de sensores de
pressão capacitivos, usando uma nova tecnologia de fabrico. Para tal o trabalho inclui todas as
etapas de desenvolvimento de um sensor, até ao fabrico dos sensores. Foram analisados os
comportamentos das estruturas com diferentes geometrias, através do uso de modelos analíticos
e foram construídos modelos em elementos finitos de sensores com diferentes geometrias.
A construção dos sensores foi feita através da impressão de tintas condutoras sobre
substratos flexíveis de poliuretano, que foram montados numa placa de circuito impresso flexível.
A leitura das capacidades dos sensores foi feita recorrendo a um conversor capacitância-digital, o
AD7150.
Os testes aos sensores foram realizados numa câmara de pressão, onde se aplicaram
pressões positivas sobre a plataforma flexível, com pressões a variar entre 1 e 2 bar. Os valores
adquiridos pelo conversor foram monitorizados e registados num computador.
No final, conseguiram-se obter várias leituras nos sensores fabricados, com variações de
capacidade a aumentar entre 6,12 fF e 60,6 fF com o aumento da área sensorial. Verificou-se
assim o correto funcionamento dos sensores e confirmou-se que o processo de fabrico é simples
e funcional.
Palavras Chave:
MEMS, sensores de pressão flexíveis (SPF), sensores capacitivos, método elementos finitos
(FEM)

viii

ix
Abstract
Flexible pressure sensors are used in a wide number of applications. Due to the irregular
nature of the surfaces involved, these types of sensors offer a solution for the measurement of
pressure between two contact surfaces.
The objective of this project was to build an array of capacitive flexible pressure sensors,
with the aid of a new fabrication technology. To achieve this, the work involved all the stages in
sensor development, from the conception to the fabrication of the sensors. The behavior of the
structures involved was analyzed with the use of analytical models and finite element models with
different geometries were built.
The sensors were fabricated using conductive inks printed on the surface of flexible
polyurethane substrates, which were then mounted on a flexible printed circuit board. The
capacitance reading of the sensors was done with the use of a capacitance-to-digital converter,
the AD7150.
The sensors were tested in a sealed pressure chamber, where pressures between 1 and
2 bar were applied on the flexible platform. The values acquired by the converter were monitored
and registered on a computer
In the end, we were able to read capacitance values on the fabricated sensors, with capacitance
values varying between 6,12 fF and 60,6 fF for increasing sensorial area. With these results, we
are able to prove the proper function of the sensors and confirm the simplicity and functionality
of the fabrication process.
Keywords:
MEMS, flexible pressure sensors, capacitive sensors, finite element method (FEM)

x

xi
Índice
AGRADECIMENTOS ..................................................................................................................... V
RESUMO .................................................................................................................................. VII
ABSTRACT ................................................................................................................................ IX
1 INTRODUÇÃO .......................................................................................................................... 1
1.1 Motivação e Enquadramento ............................................................................................. 1
1.2 Objetivos .......................................................................................................................... 2
1.3 Estrutura da Dissertação ................................................................................................... 2
2 ESTADO DA ARTE .................................................................................................................... 3
3 FUNDAMENTOS TEÓRICOS ...................................................................................................... 9
3.1 Sensores de Pressão ......................................................................................................... 9
3.2 Mecânica e Elasticidade dos Materiais .............................................................................. 11
3.3 Estruturas dos sensores de pressão.................................................................................. 13
3.4 Mecanismos de Transdução ............................................................................................ 15
3.4.1 Transdução Piezoresistivo ......................................................................................... 15
3.4.2 Transdução Capacitiva ............................................................................................. 15
3.5 Comportamento do Diafragma ......................................................................................... 16
3.6 Processo de Fabrico ........................................................................................................ 18
3.7 Eletrónica de Leitura ....................................................................................................... 20
4 MODELAÇÃO E DESENVOLVIMENTO ...................................................................................... 22
4.1 Restrições Dimensionais .................................................................................................. 22
4.2 Especificações ................................................................................................................ 22
4.3 Simulação do Sensor ...................................................................................................... 23
4.3.1 Análise dos modelos analíticos.................................................................................. 23
4.3.2 Construção do modelo do sensor em elementos finitos ............................................... 30
4.4 Escolha da Placa de Aquisição da Dados .......................................................................... 55
5 FABRICO E CARACTERIZAÇÃO ................................................................................................ 58
5.1 Fabrico dos Sensores ...................................................................................................... 58
5.2 Planeamento Experimental .............................................................................................. 60
5.3 Caracterização dos Sensores ........................................................................................... 62
6 CONCLUSÕES E TRABALHO FUTURO ..................................................................................... 65
REFERÊNCIAS .......................................................................................................................... 67

xii
Lista de Abreviaturas
MEMS – Microelectromechanical Systems
SPF – Sensores de Pressão Flexíveis
RFID – Radio Frequency Identification
PCB – Printed Circuit Board
PU – Poliuretano
FEM – Finite Element Method
CDC – Capacitance to Digital Converter

xiii
Índice de Figuras
Figura 1 - XSensor X3 Display System (Fonte: www.xsensor.com). .................................................. 7
Figura 2 – Diagrama do funcionamento do sensor. ......................................................................... 9
Figura 3 - Absolute Pressure Sensor. ............................................................................................. 10
Figura 4 - Gauge Pressure Sensor. ................................................................................................ 10
Figura 5 - Differential Pressure Sensor. ......................................................................................... 11
Figura 6 - Sólido sujeito a tensões mecânicas. .............................................................................. 12
Figura 7 – Deformação de um diafragma simples sujeita a uma pressão uniforme. ...................... 14
Figura 8 - Deformação de um diafragma com bossa ao centro. .................................................... 14
Figura 9 - Configurações sensoriais capacitivas. ............................................................................ 16
Figura 10 - Visão do topo de um diafragma. ................................................................................. 17
Figura 11 - Esquema do sensor a construir. .................................................................................. 20
Figura 12 – Plataforma Sensorial Flexível. ..................................................................................... 23
Figura 13 Deslocamento da estrutura usando função de teste dado pela equação 9. ................... 24
Figura 14 Deslocamento da estrutura usando função de teste dado pela equação 7. ................... 25
Figura 15 - Deslocamento da estrutura usando função de teste dado pela equação 8. ................. 25
Figura 16 - Vista de corte transversal da configuração do sensor. ................................................. 26
Figura 17 - Deslocamentos de acordo com o modelo analítco dado pela equação 6. .................... 27
Figura 18 - Capacidade obtida com variação da pressão aplicada - 9x9mm. ................................. 28
Figura 19 - Valor da capacidade obtida para sensor de 10x10 mm. .............................................. 29
Figura 20 - Valor da capacidade obtida para sensor de 11x11 mm. .............................................. 30
Figura 21 - Procedimento simulações FEM. .................................................................................. 31
Figura 22 – Análise da estrutura com área de 9x9 mm². ............................................................... 32
Figura 23 – Análise da estrutura com área de 13x13 mm². .......................................................... 33
Figura 24 - Perfil do deslocamento do sensor para diferentes áreas. ............................................. 34
Figura 25 – Comparação dos modelos analíticos com os modelos em elementos finitos. ............. 35
Figura 26 - Valor da capacidade com a variação da pressão aplicada. .......................................... 36
Figura 27 - Corte transversal e vista lateral da geometria do sensor com bossa. ........................... 37
Figura 28 - Deslocamento Máximo Vertical área 9x9 mm. ............................................................. 38
Figura 29 - Deslocamento máximo vertical para sensor com área 11x11 mm. .............................. 39
Figura 30 - Deslocamento máximo vertical para sensor com área 13x13 mm. .............................. 40
Figura 31 - Perfil de deslocamento da geometria com bossa ao centro. ........................................ 41
Figura 32 - Deslocamento máximo vertical para área de 9x9 mm e espessura de 2 mm. ............. 42
Figura 33 - Deslocamento máximo para área de 11x11 mm e espessura 2mm. ........................... 43
Figura 34 - Deslocamento máximo vertical para área de 13x13 mm e espessura 2mm. ............... 44
Figura 35 - Deslocamento ao longo do comprimento dos diferentes sensores (espessura=2mm). . 45
Figura 36 - Geometria do sensor com bossa em cruz. ................................................................... 45
Figura 37 - Deslocamento vertical sensor bossa em cruz 9x9 mm. ............................................... 46
Figura 38 - Deslocamento vertical do sensor bossa em cruz 11x11 mm². ..................................... 47
Figura 39 - Deslocamento vertical sensor bossa em cruz 13x13 mm. ........................................... 48
Figura 40 - Perfil deslocamento do sensor com bossa em cruz. .................................................... 49
Figura 41 - Deslocamento do sensor com bossa em cruz e área 9x9 mm. .................................... 50
Figura 42 - Deslocamento do sensor com bossa em cruz e área 11x11 mm. ................................ 51
Figura 43 - Deslocamento do sensor com bossa em cruz e área 13x13 mm. ................................ 52

xiv
Figura 44 - Deslocamento ao longo do comprimento do sensor com bossa em cruz (espessura 2 mm). ............................................................................................................................................ 53
Figura 45 - Variação da capacidade do sensor com bossa ao centro e área 13x13 mm. ............... 54
Figura 46 - Variação da capacidade do sensor com bossa em cruz. ............................................. 55
Figura 47 - Evaluation Board AD7150. .......................................................................................... 56
Figura 48 - Diagrama do CDC AD7150. ........................................................................................ 57
Figura 49 - Plataforma sensorial com sensores fabricados manualmente. ..................................... 59
Figura 50 - Interface gráfica do software do AD7150. .................................................................... 60
Figura 51 - Montagem efectuada para plano experimental. ........................................................... 61
Figura 52 - Variação da capacidade dos sensores com variação da pressão aplicada. .................. 63

xv
Índice de Tabelas
Tabela 1 - Parâmetros da simulação do sensor. ............................................................................ 26
Tabela 2 - Valores do deslocamento máximo vertical .................................................................... 40
Tabela 3 - Valor das capacidades lidas nos sensores. ................................................................... 62

xvi

1
Capítulo 1
Introdução
1.1 Motivação e Enquadramento
O mercado dos MEMS (Microelectromechanical Systems) tem crescido de forma
exponencial nos últimos anos. Este mercado tem evoluído bastante graças aos avanços na
indústria dos circuitos integrados, permitindo aumentar a sua miniaturização e melhorar o
desempenho dos dispositivos [1]. Os sensores de pressão micromaquinados têm sido alvo de
grande pesquisa desde a década de 1960, sendo já um mercado com alguma maturidade. Os
sensores de pressão têm um número alargado de aplicações, desde a engenharia biomédica, o
ramo automóvel, no controlo de processos industriais e na eletrónica de consumo.
Os sensores de Pressão Flexíveis (SPF) são dispositivos que permitem medir a
distribuição de pressão entre duas superfícies de contacto, com a particularidade de serem
flexíveis, permitindo-se modelar ao local onde estão inseridos. Devido às suas características,
estes sensores são procurados por aplicações delicadas ou no qual apresentam superfícies
irregulares.
Estes sensores consistem num elemento único ou num conjunto matriz de elementos
sensores de força ou pressão que são incorporados num substrato de transporte. Os sensores
de força ou pressão estão ligados a dispositivos eletrónicos que fazem uma leitura dos sinais
enviados pelos sensores, várias vezes por segundo e comunicam a um computador, onde é feita
a visualização e o registo das leituras obtidas.
Este projeto visa a conceção, modelação, desenho e fabrico de um sensor de pressão
flexível capacitivo. Os principais desafios estão relacionados com a conceção do sensor, a ser
fabricado numa nova tecnologia em fase de desenvolvimento, de modo a que o sensor obedeça
às especificações da aplicação desejada. A tecnologia consiste no uso de substratos flexíveis

2
com tintas condutoras em conjunto com a tecnologia de fabrico de placas de circuito impresso
flexíveis.
1.2 Objetivos
O principal objetivo deste trabalho é a conceção, simulação, desenho e fabrico de um
conjunto de sensores de pressão capacitivos para aplicações de reabilitação médica. Para tal, é
necessário percorrer todas as etapas do processo, tendo como objetivos intermédios a definição
das especificações principais para os sensores, a criação de modelos em elementos finitos para
as configurações mais promissoras e por fim fazer a caracterização dos sensores.
1.3 Estrutura da Dissertação
Este documento é constituído por um capítulo introdutório onde é apresentado o
enquadramento da dissertação e onde também são definidos os objetivos do trabalho.
O segundo capítulo apresenta o estado da arte dos sensores de pressão flexíveis onde
são apresentadas as vantagens, desvantagens e algumas das aplicações para os mesmos.
No terceiro capítulo, são apresentados os fundamentos teóricos necessários para a
compreensão e realização do projeto como conceitos de mecânica e elasticidade, as estruturas
mais utilizadas e alguns mecanismos de transdução.
O capítulo 4 apresenta a modelação dos sensores, no qual se encontram as
especificações dos mesmos, e onde são feitas várias análises ao comportamento da estrutura a
construir. Aqui são feitas análises a modelos analíticos e são construídos diversos modelos em
elementos finitos para diferentes geometrias.
No capítulo 5 tem-se o fabrico e caracterização dos sensores. É explicada a forma como
os sensores foram construídos e o planeamento experimental a executar. São apresentados
resultados experimentais dos sensores e é feita a caracterização dos mesmos.
Por fim, têm-se as conclusões ao trabalho realizado no último capítulo bem como
sugestões de trabalho futuro.

3
Capítulo 2
Estado da Arte
Os sensores de pressão micromaquinados têm sido desenvolvidos há décadas, sendo
das aplicações MEMS de maior sucesso e que ocupam a maior quota do mercado [1]. Os
avanços nos processos de fabrico de MEMS têm permitido a sua miniaturização e a diminuição
dos custos, bem como o aumento da sua robustez.
Os sensores de pressão consistem, normalmente, num diafragma com as suas
extremidades fixas. Esta estrutura deflete em resposta a uma variação de pressão aplicada sobre
si. Esta deformação, por sua vez, é detetada ao medir as tensões mecânicas a que o diafragma
está sujeito, ou através da medida do deslocamento do mesmo [2].
Existem certas aplicações onde complicações com a superfície de contacto, ou mesmo a
delicadeza do local onde se deseja medir diferenças de pressão, exigem a necessidade de uso
de sensores de pressão flexíveis (SPF).
Os sensores de pressão flexíveis são dispositivos que permitem medir a distribuição de
pressão entre duas superfícies de contacto. Comparativamente aos sensores de pressão
tradicionais, estes têm a particularidade de serem flexíveis, permitindo-se modelar ao local onde
estão inseridos. Estes sensores consistem num elemento único ou num conjunto matriz (array)
de elementos sensores de pressão que são incorporados num substrato de transporte flexível.
Os sensores de pressão podem ser classificados de acordo com o seu mecanismo de
transdução. Quanto a esses mecanismos de transdução, os mais comuns nos sensores
comercializados são os piezoresistivos e os capacitivos.
Os sensores de pressão piezoresistivos consistem num material (geralmente silício
devido às suas propriedades piezoresistivas) montado no diafragma, em que quando existe uma
deformação nesse material, essa deformação provoca uma variação no valor da resistência
desse mesmo material. Estes sensores apresentam a vantagem de ter um sinal de saída linear,
boa sensibilidade e um custo de produção reduzido. As limitações destes tipos de sensores são
a influência da temperatura. Um aumento da temperatura vai implicar alterações no valor de
resistência medido.

4
Os sensores de pressão capacitivos baseiam-se na aplicação de uma diferença de
pressão entre duas superfícies, nas quais se encontram um par de elétrodos que formam um
condensador. Esta variação de pressão provoca uma alteração no valor da capacidade.
No diafragma existe um elétrodo que juntamente com outro elétrodo (fixo) formam um
condensador. Quando existe uma pressão aplicada sobre o diafragma, este vai-se deformar e o
elétrodo móvel aproxima-se ou afasta-se do elétrodo fixo, diminuindo ou aumentando a distância
entre eles e fazendo variar o valor da capacidade do condensador.
Estes sensores apresentam a vantagem de ter maior sensibilidade relativamente aos
sensores de pressão piezoresistivos e um baixo consumo. O baixo consumo dos sensores
capacitivos, faz com que estes sejam mais atrativos nas aplicações biomédicas [3]. As
temperaturas, por sua vez, não exercem tanta influência na leitura da capacidade. Porém, têm
menor linearidade e menor gama dinâmica relativamente aos piezoresistivos.
Existem várias formas de ultrapassar estas limitações. Pode-se introduzir algumas
alterações à estrutura para melhorar a linearidade, como por exemplo, bossas ou enrugações no
diafragma. Outra forma de melhorar a linearidade do sensor é operar em modo touch. Neste
modo de operação, o diafragma entra em contacto com o elétrodo fixo (existe um isolamento
entre estes) e a linearidade do sensor é melhorada. Existem também outras configurações como
em anel-duplo, ou seja aumenta-se o valor da capacidade medido, ao aumentar a área do
condensador [4]. Também pode ser utilizada a topologia em anel. Nesta topologia, o diafragma é
fixo nas suas extremidades e ao centro. Assim, a deformação do diafragma deixa de ser ao
centro, o movimento do elétrodo móvel é quase paralelo ao elétrodo fixo, e por consequência
aumenta-se a linearidade do sensor.
A respeito da eletrónica de leitura, os circuitos para fazer a leitura nos sensores
piezoresistivos são relativamente simples. Porém, nos capacitivos a eletrónica de leitura é mais
complexa devido aos valores das capacidades serem na ordem dos picoFarad e também devido
à existência de capacidades parasitas. Para contornar este problema, a eletrónica de leitura deve
estar integrada no mesmo chip que o sensor.
Os sensores de pressão capacitivos não necessitam de colocar qualquer material no
diafragma, e por isso, podem ser alcançadas dimensões mais reduzidas. No caso dos sensores
piezoresistivos, as dimensões das piezoresistências colocadas no diafragma limitam as
dimensões alcançáveis destes tipos de sensores.

5
Ambos os sensores apresentam as suas vantagens como foi visto acima, devendo ser
escolhido qual o mecanismo a usar de acordo com aquilo que a aplicação deseja.
Os SPF também podem ser classificados de acordo com a sua sensibilidade, a sua
resolução e a sua gama dinâmica. Dependendo da aplicação, diferentes gamas dinâmicas são
necessárias. No caso da leitura de pressões no sistema cardiovascular, é necessária uma gama
dinâmica entre os 10 e os 20 kPa. Para aplicações na indústria automóvel podem ser
necessários sensores com uma gama dinâmica até centenas de MPa. Podemos ainda distinguir
os transdutores pelos seus níveis de saída, sendo que existem os discretos (distinguem dois ou
mais estados) e os analógicos.
Os sensores de pressão flexíveis são procurados pela sua flexibilidade e elasticidade,
pois contornam problemas nas superfícies. Para tal, são necessários materiais (polímeros) que
possam ser usados como substratos flexíveis ou até como dielétricos flexíveis. Vários polímeros
têm sido usados, sendo os mais usados a poliimida, polidimetilsiloxano (PDMS), politereftalato
de etileno (PET), SU-8, parileno e polímeros de cristais líquidos (LCP) [5]. Apesar das vantagens
do uso destes polímeros, estes introduzem uma limitação nos sensores de pressão flexíveis, a
histerese. Em comparação com os sensores de pressão tradicionais, estes apresentam valores
de histerese elevados [6].
Existem também alguns requisitos e limitações quanto às dimensões estruturais dos
SPF. Devem ser finos, com a espessura a variar entre os 0,1 mm até alguns milímetros. Os
sensores com maior espessura tendem a fornecer leituras erradas. A área sensorial deve ser a
menor possível, variando entre 1 mm² e 1 cm² de acordo com a resolução pretendida. [6]
Vimos anteriormente que os sensores de pressão flexíveis podem ser constituídos por
um elemento único ou um conjunto matriz de sensores. Estas matrizes de sensores são
normalmente usadas para fazer o mapeamento da distribuição de pressões ao longo de uma
área ou espaço. As leituras das capacidades nos elementos sensores da matriz são enviadas
para um computador, onde é possível (através de um software especializado) visualizar a
distribuição das pressões aplicadas.
Os sensores de pressão têm adquirido grande interesse para utilização num vasto
conjunto de aplicações, sendo utilizados na indústria automóvel, aeronáutica, biomédica e até na
eletrónica de consumo.

6
Na área da robótica, os sensores de pressão são procurados para aplicações de
reconhecimento táctil, tentando imitar a perceção humana do toque. Assim, permitem aos robôs
caracterizar e manipular objetos com diferentes texturas [7,8]. Através de sistemas de
mapeamento de pressão, é possível o desenvolvimento de uma pele eletrónica para uso em
robôs.
Na indústria automóvel, os sensores de pressão estão presentes na monitorização da
pressão dos pneus, na pressão dos gases do exaustor, e até no ajuste dos bancos dos
passageiros, melhorando o conforto. Esta última aplicação utiliza o mapeamento das pressões
para controlar a ergonomia.
Na área das aplicações biomédicas, os sensores de pressão são utilizados na
monitorização de pacientes, sendo usados por exemplo, no sistema cardiovascular [3]. Devido às
suas dimensões reduzidas, estes sensores podem ser implantados nos pacientes, permitindo a
sua monitorização e ajudar no diagnóstico de possíveis problemas cardiovasculares. Sistemas de
mapeamento de pressão são utilizados em cadeiras de rodas e até em camas inteligentes, para
a prevenção de úlceras de pressão [6].
Dohyuk Ha et al desenvolveram um sensor de pressão flexível capacitivo para a medição
de pressão intraocular, permitindo estudar melhor as causas de glaucoma no ser humano. Este
sensor, de dimensões reduzidas, consiste numa estrutura de parileno sobre um substrato de
LCP [9].
Um sensor de pressão flexível piezoresistivo foi desenvolvido por Ahmed et al. que
monitoriza o estado das estruturas em aplicações aeroespaciais. Foram montados sensores
piezoresistivos numa membrana de alumínio (que serve de diafragma), e foram embebidos num
substrato flexível de poliimida [10]. Este sensor permite uma gama dinâmica com valores
próximos de 8 MPa.
Existem também inovações ao nível da comunicação. Munnangi et al. desenvolveram um
sensor de pressão capacitivo integrado com etiquetas RFID (Radio Frequency Identification) para
a monitorização de sinais vitais [11]. Yamamoto et al. utilizaram RFID para fazer a monitorização
da pressão nos pneus de um automóvel. Desenvolveram-se sensores de pressão capacitivos em
“touch mode” devido à necessidade de obter uma boa linearidade no sensor [12].
Frank M. Yaul et al. desenvolveram um conjunto de sensores de pressão flexíveis
piezoresistivos para utilizar debaixo de água. O objetivo foi detetar variações de pressão

7
provocadas por objetos móveis e pelas ondas. O dispositivo utiliza PDMS como o substrato
flexível em conjunto com PDMS dopado com nanopartículas de carbono [13].
Nos SPF, é necessário ter em conta a relação entre a flexibilidade e a sensibilidade, Ao
utilizar ar como dielétrico, sacrificamos a sensibilidade para manter a flexibilidade. Em
contrapartida, ao usar um material sólido como dielétrico, aumentamos a sensibilidade com o
aumento da capacidade, mas a flexibilidade do sensor diminui. Hotta et al. demonstraram o uso
de líquidos encapsulados para uso como material dielétrico em conjunto com substratos flexíveis
na construção de SPF [14].
Conjuntos ou arrays de sensores podem ser utilizados no mapeamento de pressões,
permitindo ver qual a sua distribuição ao longo de um espaço ou de uma superfície. Na figura 1
pode-se observar um exemplo de um dispositivo que faz o mapeamento de pressões.
Figura 1 - XSensor X3 Display System (Fonte: www.xsensor.com).
E. Pritchard et al. desenvolveram uma matriz de sensores de pressão flexíveis
capacitivos de alta resolução usando parileno como dielétrico [5].
Neste capítulo, vimos o que são sensores de pressão flexíveis, o seu modo de
funcionamento e alguns dos mecanismos de transdução mais comuns nos sensores
comercializados. Pudemos ver também quais os materiais normalmente usados, algumas
dimensões utilizadas por estes tipos de sensores e também algumas das limitações da
tecnologia. Por fim, foram apresentadas algumas aplicações de sensores de pressão flexíveis

8
(dando destaque aos capacitivos), demonstrando algumas das potencialidades deste tipo de
sensores.

9
Capítulo 3
Fundamentos Teóricos
O objetivo deste trabalho passa pela conceção, simulação desenho e fabrico de sensores
de pressão flexíveis capacitivos. Na figura seguinte (Figura 2), temos um diagrama que dá uma
perspetiva geral do funcionamento do sensor de pressão a desenvolver.
Figura 2 – Diagrama do funcionamento do sensor.
Haverá uma pressão aplicada sobre a estrutura mecânica que compõe o nosso sensor
de pressão. O deslocamento da estrutura provocado pela pressão aplicada será detetado através
de um mecanismo de transdução capacitivo. A grandeza elétrica, a capacidade, será lida através
de uma placa de aquisição que contenha um conversor analógico-digital, e este vai comunicar
com um computador pessoal (PC).
3.1 Sensores de Pressão
Os sensores de pressão são uma aplicação de MEMS já com alguma maturidade, visto
que a pesquisa e desenvolvimento destes transdutores já existe há mais de trinta anos. Estes

10
sensores estão presentes nas mais variadas áreas como nos automóveis, na saúde, em robótica,
aplicações industriais e até e nos aparelhos usados em nossas casas.
A pressão (P) define-se como a razão entre a força (F) aplicada e a área (A) onde é
aplicada (Equação 1). A unidade SI de pressão é o N/m² ou mais frequentemente usado, o
Pascal (Pa).
P = F/A (1)
Existem vários tipos de sensores de pressão e podem ser classificados como:
Absolute Pressure Sensors – estes sensores medem pressões relativamente ao vácuo (Figura 3).
Figura 3 - Absolute Pressure Sensor.
Gauge Pressure Sensors – são sensores que medem pressões relativamente à pressão
atmosférica, necessitando para tal que parte do sensor seja ventilada para o ambiente (Figura
4).
Figura 4 - Gauge Pressure Sensor.

11
Differential Pressure Sensors – medem a diferença entre duas pressões aplicadas diferentes
(Figura 5).
Figura 5 - Differential Pressure Sensor.
De uma forma geral, os sensores de pressão consistem numa pressão aplicada sobre
uma estrutura mecânica, que por sua vez vai sofrer uma deformação. A estrutura mecânica mais
utilizada é o diafragma. Para melhor compreender as deformações nas estruturas, foi necessário
rever alguns conceitos de elasticidade dos materiais.
3.2 Mecânica e Elasticidade dos Materiais
Todos os materiais sólidos têm alguma elasticidade, ou seja a capacidade de sofrer uma
deformação e recuperar o seu estado inicial. O stress (σ) é definido como a força por unidade de
área que atua sobre a superfície de um corpo sólido. Esta força não é aplicada a um ponto mas
sim distribuída sobre toda a área da superfície. Este conceito só é válido se o volume estiver em
equilíbrio estático. Os materiais, quando sujeitos a stress apresentam alterações no seu volume.
O strain (ou tensão mecânica), por sua vez, é a deformação existente no elemento sólido quando
sujeito a stress, ou seja, quando uma força é aplicada. Na figura 6 é apresentado um sólido
(visto de cima) cujo volume inicial é representado a preto. Este sólido tem um comprimento
inicial, x. Quando o sólido é esticado, apresenta um aumento do seu comprimento.

12
Figura 6 - Sólido sujeito a tensões mecânicas.
Diz-se então que o strain é positivo. Se o sólido for comprimido, diz-se que o strain é
negativo.
Podemos então definir o strain como a variação de comprimento relativamente ao
comprimento inicial (Equação 2).
(2)
O stress e strain estão relacionados e esta relação muda de material para material. A
relação entre estes conceitos corresponde a uma constante elástica de acordo com a Lei de
Hooke (Equação 3). Esta constante corresponde ao Young’s modulus, representado por E, e cuja
unidade é N/m² ou Pascal.
(3)
A expressão anterior permite concluir que stress e strain estão linearmente relacionados
e quanto maior o Young’s modulus de um material, menor será a sua deformação para um dado
stress, e portanto maior a sua rigidez.
Voltando a olhar para a figura 5, se num dado sólido existir uma deformação provocada
por um stress num eixo (por exemplo, x), vai existir uma contração no eixo perpendicular (por

13
exemplo, y), de acordo com a expressão: σx = - v σy em que a constante, v (sem unidade de
medida) é designada por rácio de Poisson. Este rácio representa a razão entre a tensão e a
compressão num dado material. Valores típicos de rácio de Poisson variam entre 0,2 e 0,5
sendo que as borrachas apresentam um rácio mais próximo de 0,5, que corresponde a uma
conservação do volume [15].
3.3 Estruturas dos sensores de pressão
Os sensores de pressão utilizam uma estrutura mecânica simples como elemento
sensor, o diafragma. São estruturas de fácil construção, pouco sensíveis a vibrações e com boa
resposta dinâmica [1]. Estas estruturas estão sujeitas a uma deformação quando lhes é aplicada
uma pressão. Geralmente, estas deformações são detetadas medindo o stress no diafragma ou
o deslocamento do mesmo [2]. No caso dos sensores de pressão capacitivos, existe um elétrodo
montado no diafragma que se vai aproximar ou afastar dum outro elétrodo fixo, variando o valor
da capacidade.
Para poder desenhar os nossos sensores de pressão, é necessário compreender o
comportamento do diafragma quando é aplicada uma pressão. Normalmente, estas estruturas
são circulares ou retangulares (visto de cima). O seu comportamento depende de vários
parâmetros. Dependendo da sua geometria, da sua área ou espessura, o diafragma terá
diferentes comportamentos. A geometria mais comum consiste num diafragma liso, com
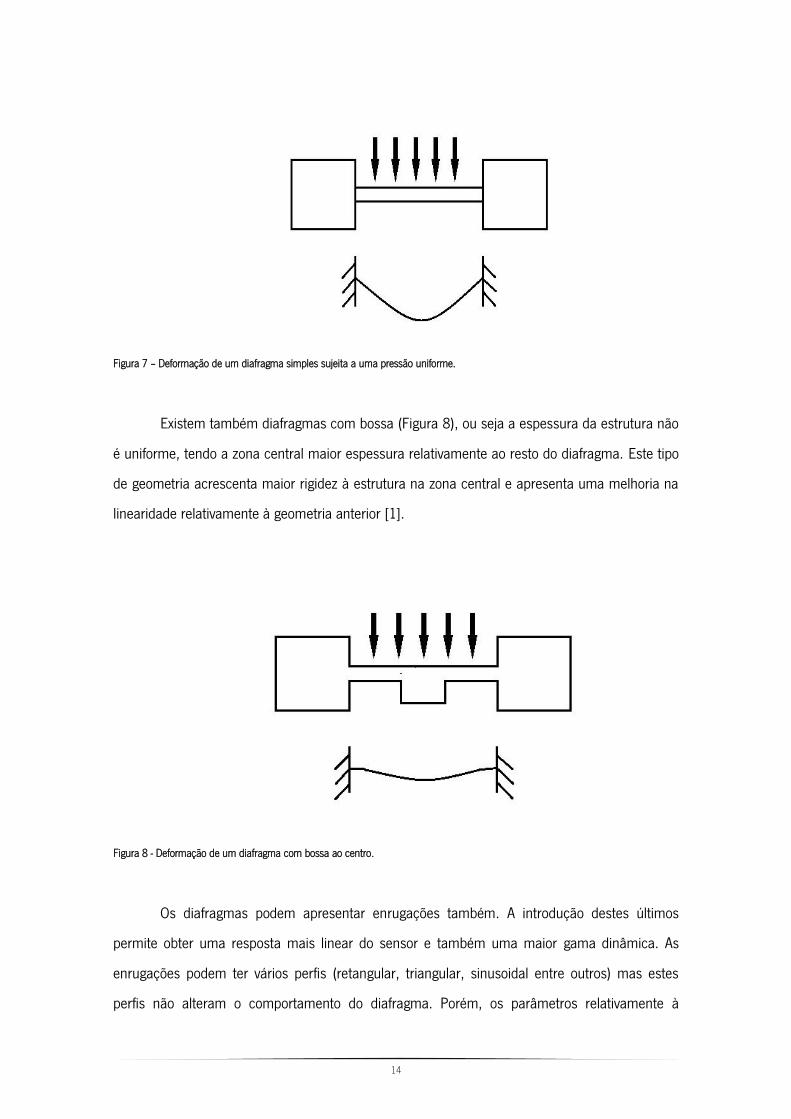
espessura uniforme e com as suas extremidades fixas, como podemos ver na figura 7. Quando
se aplica uma pressão uniforme sobre toda a superfície, a deflexão máxima normalmente ocorre
no centro da estrutura.
14
Figura 7 – Deformação de um diafragma simples sujeita a uma pressão uniforme.
Existem também diafragmas com bossa (Figura 8), ou seja a espessura da estrutura não
é uniforme, tendo a zona central maior espessura relativamente ao resto do diafragma. Este tipo
de geometria acrescenta maior rigidez à estrutura na zona central e apresenta uma melhoria na
linearidade relativamente à geometria anterior [1].
Figura 8 - Deformação de um diafragma com bossa ao centro.
Os diafragmas podem apresentar enrugações também. A introdução destes últimos
permite obter uma resposta mais linear do sensor e também uma maior gama dinâmica. As
enrugações podem ter vários perfis (retangular, triangular, sinusoidal entre outros) mas estes
perfis não alteram o comportamento do diafragma. Porém, os parâmetros relativamente à
15
espessura do material, a profundidade da enrugação ou o seu comprimento influenciam o
comportamento.
Para detetar as deformações no diafragma, são necessários mecanismos de transdução
que serão abordados na secção seguinte.
3.4 Mecanismos de Transdução
Existem vários mecanismos de transdução entre os quais os piezoresistivos, capacitivos,
piezoelétricos e até óticos. Destacam-se entre estes como os mais utilizados os piezoresistivos e
os capacitivos. Em seguida serão abordados ambos os mecanismos de transdução com maior
ênfase nos capacitivos.
3.4.1 Transdução Piezoresistivo
A piezoresistividade, descoberta pelo Lord Kelvin em meados do século 19, é um efeito
que os materiais apresentam quando há uma alteração na sua resistência devido a uma pressão
aplicada [1]. Esta alteração deve-se a alterações nas suas dimensões (efeito geométrico) ou na
resistividade (efeito piezoresistivo). Neste mecanismo de transdução, as aplicações têm um
material condutor ou semicondutor que é fabricado ou montado numa superfície que sofre uma
deformação [15]. Variações nas dimensões destes materiais resultam em mudanças no seu
valor de resistência (efeito geométrico). A resistência (em Ω) varia de acordo com a equação 4,
(4)
em que ρ é a resistividade do material, L o seu comprimento e A representa a sua área.
3.4.2 Transdução Capacitiva
O mecanismo de transdução capacitivo é extremamente simples. Os sensores
capacitivos são normalmente compostos por um ou mais elétrodos fixos e um ou mais elétrodos
móveis, que fazem com que o valor da capacidade varie. Para um condensador com uma
estrutura básica de duas placas paralelas, a capacidade (em Farad) é dada pela equação 5,

16
(5)
em que representa a constante dielétrica no vácuo ( ), ԑ corresponde à
constante dielétrica do material entre as placas do condensador. ‘A’, por sua vez, corresponde à
área das placas e ‘d’ a distância (ou gap) entre as mesmas. Através desta equação, podemos
utilizar qualquer dos parâmetros (ԑ, A ou d) para provocar alterações da capacidade. Na figura 9,
temos três exemplos de configurações sensoriais. Em a) tem-se a variação da capacidade
através da variação da distância entre placas. Em b) tem-se a variação da sobreposição das
áreas das placas e em c) varia-se a constante dielétrica entre as placas.
Figura 9 - Configurações sensoriais capacitivas.
A construção dos sensores capacitivos apresenta a vantagem de ser simples e a
capacidade de manter as suas propriedades físicas com variações de temperatura. Porém,
apresentam a desvantagem de serem não-lineares como podemos verificar através da equação
5. As medições das capacidades têm que ter em conta também os efeitos de capacidades
parasitas e por isso são necessárias técnicas para minimizar os seus efeitos. Por isso, os
circuitos de leitura devem estar próximos ou até mesmo integrados nos sensores.
3.5 Comportamento do Diafragma
O trabalho visa a conceção de um sensor de pressão flexível capacitivo. O sensor de
pressão será composto por dois elétrodos (um móvel e um fixo), separados entre si por uma

17
distância inicial , e contendo um dielétrico entre si, formando um condensador de placas
paralelas. O dielétrico pode ser ar ou outro material, de acordo com as características do sensor
e as suas necessidades. Ao ser aplicada uma pressão uniforme sobre o diafragma do sensor, a
distância entre elétrodos vai diminuir, e por consequência o valor da capacidade vai aumentar.
Qualquer variação de pressão irá provocar alterações no valor da capacidade.
As deformações e os comportamentos da estrutura podem ser calculados
analiticamente. Na figura 10, temos uma configuração comum para a estrutura do sensor. Visto
de cima, temos um diafragma quadrado com um lado de comprimento L (L = 2 x a).
Figura 10 - Visão do topo de um diafragma.
Se tivermos uma pressão aplicada, a deflexão do diafragma quadrado ao centro, ,
pode ser calculada através da equação 6, [16]
(
( ) ) ( (
) (
)) (6)
em que corresponde à variação da pressão, a espessura do material, o Young’s
Modulus do material e o rácio de Poisson. Porém, esta equação não permite calcular a
deflexão ao longo do diafragma (deflexão não é uniforme), condição necessária para o cálculo da
capacidade. Para tal, existem funções de teste (Equações 7, 8 e 9) que permitem modelizar as
deflexões no diafragma numa posição com coordenadas x,y.

18
( ) [( ( ))( ( ))] (7)
( ) [ ( ( )) ( ( ))] (8)
( ) (
) (( (
)) ( (
))) (9)
Se tivermos um condensador de placas paralelas com os elétrodos fixos, a expressão
que permite calcular a capacidade foi vista na secção anterior. Porém o deslocamento do
diafragma não é uniforme, sendo necessário recorrer ao cálculo integral da área total. A
expressão que permite calcular a capacidade nestas condições é dada pela equação 10,
∬
( ) (10)
3.6 Processo de Fabrico
O processo de fabrico é inovador, e consiste em utilizar substratos de poliuretano (PU)
em conjunto com tintas condutoras para fazer o desenho dos elétrodos sobre o substrato. Os
elétrodos serão impressos sobre o substrato utilizando uma impressora de fluídos (Xennia
Carnelian). É utilizado também um processo de fabrico de placas de circuito impresso (PCB –
Printed Circuit Board) flexíveis. A placa terá uns orifícios que vão constituir o dielétrico dos
condensadores. Na PCB flexível estão também as ligações elétricas necessárias, evitando o uso
de cablagens.
O desenho da PCB flexível será de acordo com as regras de desenho da Minco [16].
Esta empresa permite o fabrico de circuitos impressos flexíveis, com as mesmas propriedades
de uma PCB normal. Os Flex Circuits, assim apelidados, oferecem inúmeras vantagens
relativamente às tradicionais PCB. Uma dessas vantagens consiste na versatilidade do desenho
do circuito. Os Flex Circuits podem assumir desenhos tridimensionais, o que permite diminuir o
espaço ocupado do circuito. Outra das vantagens consiste na sua longevidade. Os circuitos
podem ter tamanhos reduzidos e ao mesmo tempo ter uma robustez que permita o
funcionamento durante inúmeros ciclos de trabalho. A sua construção robusta permite também
o funcionamento dos circuitos em ambientes severos. Uma outra vantagem é a resistência dos

19
circuitos às vibrações, sendo eles mais resistentes aos choques e a vibrações que as PCB
normais [17].
Vistas as vantagens dos circuitos impressos flexíveis, é preciso ter em conta o processo
de fabrico dos mesmos. Dependendo do desenho e do número de camadas do circuito, o custo
pode variar de forma significativa. De acordo com o guia de desenho da PCB, é possível ter um
máximo de 16 camadas.
Existem algumas restrições e padrões no desenho da PCB. A nível de especificações
físicas, a placa só pode ter uma área máxima de 419 x 559 mm. Os condutores presentes na
placa têm que ter uma largura mínima de 0,038 mm e os furos um diâmetro mínimo de 0,051
mm. Quanto à flexibilidade da placa, o valor vai depender do número de camadas. Pode variar
entre 6 a 24 vezes a espessura mínima do circuito.
Os materiais que compõem as placas também têm espessuras padrão. No caso do
substrato flexível de poliimida (Kapton™), a espessura pode variar entre 12,5 µm a 125 µm. Os
condutores mais utilizados são o cobre, níquel e uma mistura de ambos os materiais. As
dimensões mais utilizadas para a espessura de cobre têm 18 µm e 35 µm.
Tendo em conta estas dimensões, podemos esquematizar o processo de fabrico. A
figura 11 ilustra o esquemático de um dos sensores a construir. A PCB flexível será composta
por um substrato de poliimida, com os condutores de cobre sobre as suas faces para fazer as
ligações necessárias. A camada de poliimida terá 125 µm de espessura e as pistas de cobre
uma espessura de 35 µm, o que dá uma distância total entre os elétrodos (gap) de 125 µ + 35
µ x 2 = 195 µm. Os substratos de poliuretano serão colados sobre as zonas onde se encontram
os orifícios na placa, que vão constituir a camada dielétrica. Sobre esses substratos, serão
pintados os elétrodos com o uso de tintas condutoras e assim, será construído o sensor.

20
Figura 11 - Esquema do sensor a construir.
3.7 Eletrónica de Leitura
É necessário fazer a leitura da capacidade dos sensores de pressão. Para tal,
necessitamos de um conversor analógico-digital. Neste caso concreto precisamos de um
capacitance-to-digital converter (CDC) para fazer a leitura da capacidade. O conversor a escolher
vai depender das especificações dos sensores em concreto como a sua gama dinâmica,
sensibilidade e largura de banda. Sabemos à partida que o conversor terá que ter pelo menos
um canal de entrada para fazer a leitura da capacidade. A sua gama dinâmica será na ordem
dos picoFarad, pois são as variações típicas neste tipo de sensores de pressão. Será necessário
também ter em conta o consumo do conversor, sendo preferível um conversor com um baixo
consumo.
Tendo em conta estes requisitos, deve-se encontrar uma placa de aquisição que
contenha um CDC adequado. Também é necessário ter em conta o tipo de comunicação, pois a
placa será ligada a um PC. A placa deverá ter também um software que permita visualizar e
monitorizar as variações da capacidade através do computador.
Após a definição das especificações dos sensores, será escolhido uma placa de
aquisição adequada.

21
Neste capítulo foram vistos alguns dos conceitos necessários para o desenvolvimento de
um elemento sensor. Foram revistos alguns conceitos de elasticidade dos materiais, as
estruturas e os mecanismos de transdução mais utilizados neste tipo de dispositivos. Foram
apresentados também algumas expressões que procuram descrever o comportamento das
estruturas utilizadas, permitindo depois fazer uma análise mecânica e electrostática das
mesmas. Por fim, foram apresentadas as vantagens e limitações impostas pelo processo de
fabrico, que terão que se ter em conta ao longo do desenvolvimento.

22
Capítulo 4
Modelação e Desenvolvimento
4.1 Restrições Dimensionais
Devido às regras de desenho do processo de fabrico da PCB flexível, existem limitações
quanto às dimensões possíveis para os sensores de pressão. Vimos no final do capítulo anterior
que a espessura máxima do substrato de poliimida é de 125 µm. A esta espessura, junta-se a
espessura das ligações de cobre que têm 35 µm. Como existem ligações de cobre em ambas as
faces da PCB, a espessura máxima total é de 195 µm, sendo este o valor máximo para a
distância entre elétrodos (gap). As áreas sensoriais típicas neste tipo de aplicações foram vistas
no capítulo 2. Variam normalmente entre 1 mm² e 1 cm². A espessura do substrato de
poliuretano flexível deve ter poucos milímetros, de forma a não perturbar as leituras obtidas.
4.2 Especificações
Foi necessário definir quais as especificações da plataforma sensorial flexível a
desenvolver para proceder a simulações de âmbito estrutural e eletrostático. Como a aplicação
alvo é a monitorização da atividade de fisioterapia, nomeadamente o equilíbrio durante sessões
de reabilitação, definiu-se que a plataforma sensorial seria em forma de tapete e capaz de
detetar a posição de equilíbrio do paciente na atividade em questão. As dimensões foram
definidas para os elementos sensoriais tendo em conta o tamanho médio de um adulto
masculino. O tapete será constituído por duas áreas, em que o paciente coloca um pé em cada
área. Essas duas áreas serão compostas por quatro elementos sensoriais (Figura 12), em que
cada elemento sensor é constituído por uma matriz de sensores de pressão flexíveis capacitivos.
O objectivo, portanto, passa pela definição das especificações dos sensores que irão compor o
elemento sensorial.

23
Figura 12 – Plataforma Sensorial Flexível.
Para os sensores de pressão foram também definidas as especificações de pressão
tendo em conta um peso máximo do utilizador de 120 kg. Cada área contém um conjunto de
sensores em que a pressão aplicada será de aproximadamente 82 kPa. No caso de o utilizador
estar em desequilíbrio (assumindo que a área passa para metade), os sensores terão de detetar
uma pressão de aproximadamente 163 kPa. Especificou-se portanto, uma gama dinâmica de
pressão (pressure range) dos sensores a variar de 0 a 170 kPa.
4.3 Simulação do Sensor
Após a definição das especificações, procedeu-se às simulações do elemento sensor,
fazendo uma análise aos modelos analíticos disponíveis e a construção de modelos em
elementos finitos para os sensores.
4.3.1 Análise dos modelos analíticos
No capítulo anterior, vimos um modelo analítico que procura descrever o
comportamento do sensor de pressão. Existem também outros modelos analíticos como o
seguinte, dado pela equação 11 [18]
[
] [
( ) ] ( ) [
( ) ]
(11)

24
em que é o stress inicial e os parâmetros e ( ) são definidos como:
;
;
; ( )
( )( )
( )
A análise dos modelos analíticos é feita no MATLAB, um software dedicado ao cálculo
numérico. Aqui, serão introduzidas as equações relativas ao comportamento do diafragma e
serão introduzidos os parâmetros relativos à geometria do nosso sensor.
Nesta primeira fase, fez-se uma análise das três funções de teste e por fim será feita
uma comparação dos resultados com as simulações dos sensores em elementos finitos para ver
qual a função teste que mais se aproxima com o comportamento observado nas simulações em
elementos finitos.
Nas figuras 13, 14 e 15 temos um exemplo do comportamento das estruturas de acordo
com as funções teste definidas no capítulo anterior. A figura 13 ilustra a deformação de acordo
com a função teste dada pela equação 9 no capítulo anterior.
Figura 13 Deslocamento da estrutura usando função de teste dado pela equação 9.
Na figura 14, podemos observar o deslocamento do diafragma de acordo com a função
teste dada pela equação 7 e por fim a figura 15 ilustra o deslocamento quando a equação 8 é
usada como função de teste.

25
Figura 14 Deslocamento da estrutura usando função de teste dado pela equação 7.
Figura 15 - Deslocamento da estrutura usando função de teste dado pela equação 8.
Em primeiro lugar, fez-se uma variação de pressão para ver qual o valor do
deslocamento ao centro, ou seja a amplitude maior do deslocamento.
Introduziram-se os parâmetros relativos à geometria, como o seu comprimento, a
espessura do diafragma, o Young’s Modulus do poliuretano e o rácio de Poisson de acordo com
a tabela 1.

26
Tabela 1 - Parâmetros da simulação do sensor.
Parâmetros Valores
E (Young’s Modulus) Poliuretano 15 MPa
v (rácio de Poisson) 0,5
t (espessura) [1,5 – 2 mm]
L (comprimento do diafragma)
gap
[9 – 13 mm]
195 µm
A figura 16 ilustra uma vista lateral da configuração do sensor e os seus parâmetros
para simulação.
Figura 16 - Vista de corte transversal da configuração do sensor.
Resultados das Análises
Os resultados das análises permitem adquirir alguns dados relativamente à natureza da
estrutura e determinar algumas das suas características. Fizeram-se alguns testes no MATLAB e

27
verificou-se que os resultados dos deslocamentos eram semelhantes em ambos os modelos
analíticos (Equações 6 e 11) e por isso, para o cálculo numérico da capacidade passou-se a ter
em conta apenas o modelo dado pela equação 6. A razão pela comparação dos modelos é para
verificar se existem diferenças entre eles, sendo que um dos modelos pode ter em conta aspetos
diferentes no que diz respeito ao comportamento da estrutura.
O resultado dos deslocamentos para várias áreas sensoriais (e com espessura de 2 mm
de poliuretano) é ilustrado no gráfico da figura 17. Conclui-se que o deslocamento máximo (ao
centro) aumenta com o aumento da área. Para variações de pressão, ΔP, entre os 10 kPa e 70
kPa verificam-se deslocamentos de 6 µm a 42,7 µm no caso do sensor com 9x9 mm² e entre
26,5 µm e 185 µm no caso do sensor com 13x13 mm².
Depois de calculados os deslocamentos máximos, utilizaram-se os resultados obtidos
para o cálculo da capacidade dos sensores. Foram utilizadas as funções teste dadas pelas
equações 7, 8 e 9 para ver quais as variações capacitivas.
Figura 17 - Deslocamentos de acordo com o modelo analítco dado pela equação 6.
10k 20k 30k 40k 50k 60k 70k
0,0
50,0µ
100,0µ
150,0µ
200,0µ
De
slo
ca
me
nto
(m
)
P = P-P0 (Pa)
9x9 mm2
10x10 mm2
11x11 mm2
12x12 mm2
13x13 mm2

28
Os gráficos seguintes ilustram as capacidades obtidas para cada função teste com as
variações de pressão aplicadas. No gráfico da figura 18, temos os valores obtidos para o sensor
de 9x9 mm², sendo que a função teste dada pela equação 8 é a que apresenta uma maior
variação da capacidade. Para um ΔP de 70 kPa, obtém-se um valor próximo de 4,3 pF. A função
teste dada pela equação 7 é a que apresenta menores variações das três testadas.
Figura 18 - Capacidade obtida com variação da pressão aplicada - 9x9mm.
A figura 19 ilustra um gráfico onde estão apresentados os valores da capacidade para o
sensor de 10x10 mm². Confirma-se novamente uma maior variação da capacidade para a
função teste dada pela equação 8 com valores a variar entre 4,5 e 5,8 pF. A função teste dada
pela equação 9 apresenta novamente uma menor variação do valor da capacidade para um
aumento da variação de pressão no sensor.
0 10k 20k 30k 40k 50k 60k 70k
3,6p
3,8p
4,0p
4,2p
4,4p
Ca
pa
cita
nce
(F
)
P = P-P0 (Pa)
Trial Function - Equation 7
Trial Function - Equation 9
Trial Function - Equation 8

29
Figura 19 - Valor da capacidade obtida para sensor de 10x10 mm.
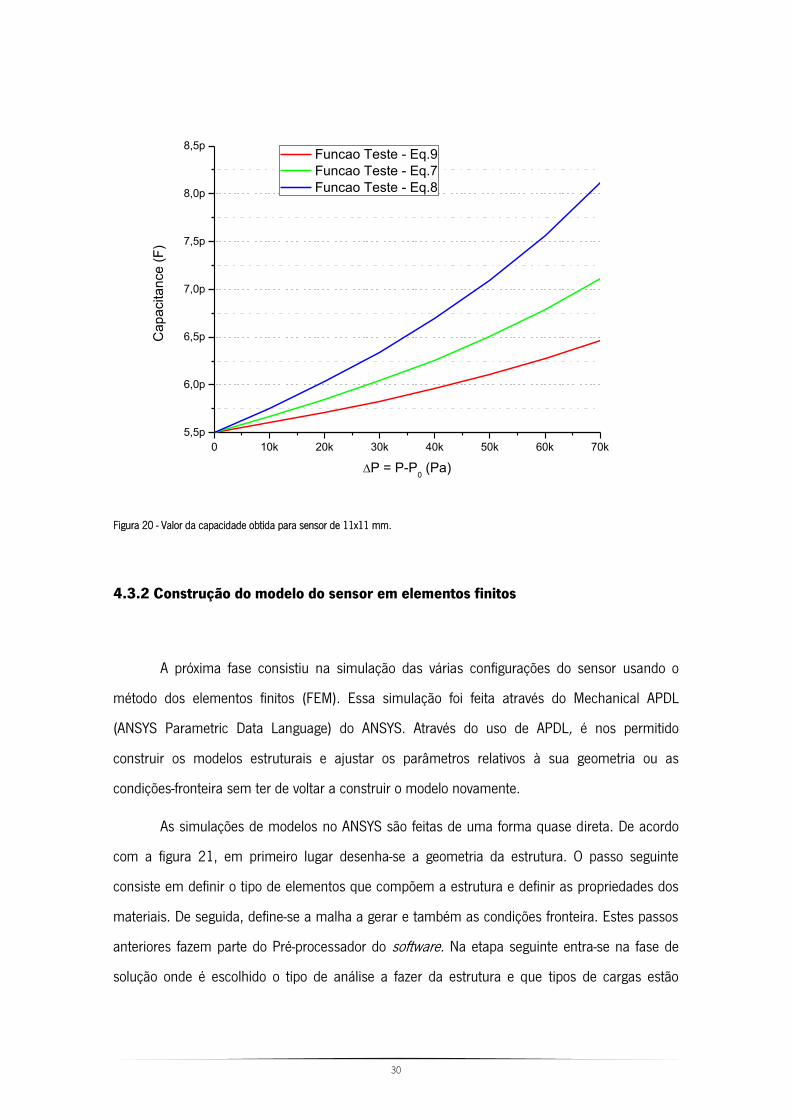
Por fim, na figura 20, tem-se a variação da capacidade para uma área de 11x11 mm².
Confirmam-se as mesmas tendências verificadas nos gráficos anteriores. As variações da
capacidade são ainda maiores para as outras áreas testadas (12x12 mm² e 13x13 mm²).
Porém, os deslocamentos verificados para essas áreas eram muito elevados, (maior que o valor
do gap) e não foi possível calcularmos a capacidade para variações de pressão muito elevadas
em que os deslocamentos ultrapassam o valor do gap.
0 10k 20k 30k 40k 50k 60k 70k
4,5p
5,0p
5,5p
6,0pC
ap
acita
nce
(F
)
P = P-P0 (Pa)
Funcao Teste - Eq. 9
Funcao Teste - Eq. 7
Funcao Teste - Eq. 8
30
Figura 20 - Valor da capacidade obtida para sensor de 11x11 mm.
4.3.2 Construção do modelo do sensor em elementos finitos
A próxima fase consistiu na simulação das várias configurações do sensor usando o
método dos elementos finitos (FEM). Essa simulação foi feita através do Mechanical APDL
(ANSYS Parametric Data Language) do ANSYS. Através do uso de APDL, é nos permitido
construir os modelos estruturais e ajustar os parâmetros relativos à sua geometria ou as
condições-fronteira sem ter de voltar a construir o modelo novamente.
As simulações de modelos no ANSYS são feitas de uma forma quase direta. De acordo
com a figura 21, em primeiro lugar desenha-se a geometria da estrutura. O passo seguinte
consiste em definir o tipo de elementos que compõem a estrutura e definir as propriedades dos
materiais. De seguida, define-se a malha a gerar e também as condições fronteira. Estes passos
anteriores fazem parte do Pré-processador do software. Na etapa seguinte entra-se na fase de
solução onde é escolhido o tipo de análise a fazer da estrutura e que tipos de cargas estão
0 10k 20k 30k 40k 50k 60k 70k
5,5p
6,0p
6,5p
7,0p
7,5p
8,0p
8,5pC
ap
acita
nce
(F
)
P = P-P0 (Pa)
Funcao Teste - Eq.9
Funcao Teste - Eq.7
Funcao Teste - Eq.8

31
envolvidos. Por fim faz-se o tratamento e manipulação dos dados obtidos através do Pós-
Processamento do ANSYS.
Figura 21 - Procedimento simulações FEM.
As simulações do modelo em elementos finitos vão ser divididas em duas partes. Em
primeiro lugar, fazem-se análises mecânicas da estrutura do sensor. Depois, os resultados das
análises mecânicas serão transferidos para o modelo eletrostático a construir, de modo a
calcular a capacidade do modelo.
O modelo foi construído com base nos parâmetros e resultados das simulações em
MATLAB (ver Tabela 1). A geometria consiste num sensor retangular comum com diafragma
simples. Após construir o modelo, o resultado da análise mecânica da estrutura pode ser
observado na figura 22 para o sensor com área 9x9 mm² e 13x13 mm² na figura 23. Verificou-
se que o deslocamento maior ocorre ao centro da estrutura como esperado.
Pré-Processador
• Geometria
• Tipo de Elemento
• Propriedades dos Materiais
• Condições Fronteira
Solução
• Tipo de Análise (Mecânica, Térmica, Electrostática, etc.
Pós-Processador
• Tratamento de Dados

32
Figura 22 – Análise da estrutura com área de 9x9 mm².
O valor do deslocamento máximo aumenta com o aumento da área do sensor, como
pode ser comprovado no sensor de 13x13 mm².

33
Figura 23 – Análise da estrutura com área de 13x13 mm².
Recolheram-se posteriormente os dados sobre o deslocamento das estruturas ao longo
do seu comprimento. Na figura 24, é ilustrado o perfil de deslocamento da estrutura com
diferentes áreas sensoriais. De acordo com o gráfico da figura 24, pode ser visto que o
deslocamento máximo é substancialmente mais elevado para áreas superiores a 11x11 mm².

34
Figura 24 - Perfil do deslocamento do sensor para diferentes áreas.
Fazendo a comparação dos modelos analíticos com os modelos FEM, verificou-se por
exemplo que os resultados obtidos nos diferentes modelos não eram muito próximos. Na figura
25, tem-se uma comparação dos resultados do deslocamento dos sensores obtidos com os
modelos analíticos e os modelos FEM (para as áreas de 10x10 e 11x11 mm²). Os resultados
obtidos devem-se ao facto de o tipo de resposta do diafragma da estrutura ser não linear. Por
isso, os modelos analíticos não têm em conta todos os aspetos não lineares da estrutura.
-350,0µ
-300,0µ
-250,0µ
-200,0µ
-150,0µ
-100,0µ
-50,0µ
0,0
-8m -7m -6m -5m -4m -3m -2m -1m 0 1m 2m 3m 4m 5m 6m 7m 8m
Comprimento (m)
De
slo
ca
me
nto
(m
)
9x9 mm2
10x10 mm2
11x11 mm2
12x12 mm2
13x13 mm2

35
Figura 25 – Comparação dos modelos analíticos com os modelos em elementos finitos.
O próximo passo consistiu em fazer a análise eletrostática do sensor, construindo um
modelo de acordo com os resultados dos deslocamentos obtidos nas análises mecânicas. Para
um sensor com área de 9x9 mm², podemos observar na figura 26 a capacidade obtida com a
variação da pressão aplicada sobre a estrutura. Podemos concluir, com base no gráfico da figura
que para o sensor de área 9x9 mm², a variação da capacidade é de aproximadamente 2 pF para
variações de pressão até 70 kPa.
10k 20k 30k 40k 50k 60k 70k
0,0
50,0µ
100,0µ
150,0µ
200,0µD
eslo
ca
me
nto
(m
)
P = P-P0 (Pa)
10x10 mm2 - Modelo Analitico
10x10 mm2 - FEM
11x11 mm2 - Modelo Analitico
11x11 mm2 - FEM

36
Figura 26 - Valor da capacidade com a variação da pressão aplicada.
Novas Geometrias
Em seguida, foram construídos modelos para sensores com diferentes geometrias, e
variando os seus parâmetros. Assim, podemos ver se algum desses modelos apresentam
características de interesse (como por exemplo, melhor linearidade) para posterior fabrico.
Serão feitas análises estruturais de duas configurações escolhidas. As configurações utilizadas
são com bossa ao centro e com bossa em cruz.
As primeiras simulações consistem num sensor quadrado com um diafragma a variar de
9 mm² a 13 mm². O sensor contém ainda uma largura e um comprimento extra de 1 mm de
cada lado. A bossa na estrutura situa-se ao centro do diafragma e tem uma largura de 2,5 mm.
A distância entre elétrodos (gap) será de 195 µm, de acordo com o tamanho máximo permitido
pelo processo de fabrico. A espessura das placas do condensador (de Poliuretano) terá 1,5 mm.
A figura 27 ilustra um corte transversal da geometria do sensor com bossa ao centro a), e a
geometria vista de cima. A pressão aplicada sobre o sensor será de 170 kPa, ou seja uma
variação de pressão de 70 kPa em relação à pressão ambiente.
0 10k 20k 30k 40k 50k 60k 70k
3,5p
4,0p
4,5p
5,0p
5,5pC
ap
acita
nce
(F
)
P = P-P0 (Pa)
Capacitance

37
Figura 27 - Corte transversal e vista lateral da geometria do sensor com bossa.
Na figura 28, podemos ver o deslocamento da estrutura com a pressão máxima
aplicada. A área total do sensor é de 9x9 mm². Pode-se ver que o deslocamento é menor ao
centro devido à bossa no diafragma. O deslocamento máximo vertical é de 25 µm como se pode
observar na figura (DMX = 0,250E-04).

38
Figura 28 - Deslocamento Máximo Vertical área 9x9 mm.
Em seguida, fizeram-se incrementos de 1 mm ao comprimento do diafragma do sensor
para ver qual o comportamento nas mesmas condições. Na figura seguinte (Figura 29), tem-se o
resultado da análise do sensor com área de 11x11 mm². Verifica-se que o deslocamento
máximo vertical é superior ao da figura anterior, com um valor de 45 µm.

39
Figura 29 - Deslocamento máximo vertical para sensor com área 11x11 mm.
Na figura 30, tem-se por fim a última simulação, desta vez com uma área de 13x13
mm². Mais uma vez verificou-se um novo aumento no deslocamento vertical, para 75,6 µm.

40
Figura 30 - Deslocamento máximo vertical para sensor com área 13x13 mm.
Na tabela abaixo (Tabela 2), encontram-se listados os valores máximos do deslocamento
vertical da estrutura com a variação da área do mesmo.
Tabela 2 - Valores do deslocamento máximo vertical
Área Deslocamento Máximo Vertical
9x9 mm² 25 µm
10x10 mm² 33,9 µm
11x11 mm² 45 µm
12x12 mm² 58,8 µm
13x13 mm² 75,6 µm
Após a realização das simulações, passou-se ao tratamento dos dados recolhidos das
análises estruturais. Recolheram-se os dados referentes às deslocações verticais do sensor ao

41
longo do seu comprimento. No gráfico da figura 31, pode-se ver como varia o deslocamento
vertical ao longo da estrutura. Verifica-se que o deslocamento é menor nas zonas da bossa do
diafragma e conclui-se portanto, que o deslocamento vertical aumenta com a área do sensor.
Figura 31 - Perfil de deslocamento da geometria com bossa ao centro.
Em seguida, passou-se a um aumento da espessura das placas de Poliuretano para 2
mm, a fim de verificar qual o efeito que terá no deslocamento vertical do sensor. Fizeram-se as
simulações novamente e com as mesmas condições que anteriormente. Na figura 32, temos o
resultado do deslocamento para o sensor com área total de 9x9 mm². Verifica-se um
deslocamento máximo vertical de 18,8 µm, valor menor que na simulação do sensor com as
placas de poliuretano de 1,5 mm.
-80,0µ
-70,0µ
-60,0µ
-50,0µ
-40,0µ
-30,0µ
-20,0µ
-10,0µ
0,0
-8m -7m -6m -5m -4m -3m -2m -1m 0 1m 2m 3m 4m 5m 6m 7m 8m
Comprimento (m)
De
slo
ca
me
nto
(m
)
9x9 mm2
10x10 mm2
11x11 mm2
12x12 mm2
13x13 mm2

42
Figura 32 - Deslocamento máximo vertical para área de 9x9 mm e espessura de 2 mm.
Na próxima figura (Figura 33), tem-se o resultado da análise do sensor com área de
11x11 mm². Regista-se um aumento do deslocamento vertical em relação ao sensor com área
de 9x9 mm², como é esperado, mas o deslocamento é menor que no mesmo sensor simulado
com a espessura de 1,5 mm.

43
Figura 33 - Deslocamento máximo para área de 11x11 mm e espessura 2mm.
Na figura 34, tem-se por fim a última análise, agora com área de 13x13 mm². Mantém-
se o aumento do deslocamento vertical como seria de esperar.

44
Figura 34 - Deslocamento máximo vertical para área de 13x13 mm e espessura 2mm.
No gráfico da figura 35, temos o resultado da recolha dos deslocamentos verticais ao
longo do comprimento do sensor. Comparativamente ao gráfico da figura 31, o deslocamento da
estrutura é consideravelmente menor com o aumento da espessura de poliuretano. Para o
sensor com área total de 13x13 mm², o deslocamento chega a ser aproximadamente 30 µm
menor.

45
Figura 35 - Deslocamento ao longo do comprimento dos diferentes sensores (espessura=2mm).
De seguida, fizeram-se análises estruturais, mas desta vez com a bossa em cruz, usando
uma bossa com a mesma largura que a bossa simples. Na figura 36, é ilustrada a geometria
com um corte transversal a) e a geometria vista de cima b).
Figura 36 - Geometria do sensor com bossa em cruz.
-50,0µ
-40,0µ
-30,0µ
-20,0µ
-10,0µ
0,0
-8m -7m -6m -5m -4m -3m -2m -1m 0 1m 2m 3m 4m 5m 6m 7m 8m
Comprimento (m)
De
slo
ca
me
nto
(m
)
9x9 mm2
10x10 mm2
11x11 mm2
12x12 mm2
13x13 mm2

46
As análises foram feitas com as mesmas condições e a mesma carga aplicada. Em
primeiro lugar, fez-se a simulação com a espessura de poliuretano de 1,5 mm. Começou-se por
fazer a análise ao sensor com área de 9x9 mm². Na figura abaixo (Figura 37), vemos o resultado
da análise e verifica-se um deslocamento máximo vertical de 13,7 µm, menor que na estrutura
com bossa simples.
Figura 37 - Deslocamento vertical sensor bossa em cruz 9x9 mm.
Na figura seguinte (Figura 38), temos o resultado do deslocamento do sensor com área
de 11x11 mm². Verifica-se um aumento esperado no deslocamento vertical da estrutura (24,4
µm).

47
Figura 38 - Deslocamento vertical do sensor bossa em cruz 11x11 mm².
E por fim na figura 39, a análise da estrutura com 13x13 mm² onde se verifica um
deslocamento de 40,9 µm, valor menor até que na simulação do sensor com bossa simples
(75,6 µm)

48
Figura 39 - Deslocamento vertical sensor bossa em cruz 13x13 mm.
Fez-se nova recolha de dados acerca dos deslocamentos, desta vez ao longo de um
quarto do seu comprimento, devido a ser onde se verificam os maiores deslocamentos da
estrutura. No gráfico da figura seguinte (Figura 40), temos o resultado dos deslocamentos da
estrutura analisada. Verificam-se deslocamentos menores que na estrutura com bossa simples.

49
Figura 40 - Perfil deslocamento do sensor com bossa em cruz.
Em seguida, fizeram-se as mesmas simulações estruturais, com um aumento da
espessura para 2 mm. Esperava-se que houvesse uma diminuição nos deslocamentos verticais
relativamente às simulações anteriores.
Na figura 41, tem-se o resultado para a área sensorial de 9x9 mm², onde se pode ver
um deslocamento vertical de 10,5 µm. Confirma-se um valor menor para o deslocamento da
estrutura em relação à estrutura simulada anteriormente com área igual e espessura menor.
-50,0µ
-40,0µ
-30,0µ
-20,0µ
-10,0µ
0,0
-8m -7m -6m -5m -4m -3m -2m -1m 0 1m 2m 3m 4m 5m 6m 7m 8m
Comprimento (m)
De
slo
ca
me
nto
(m
)
9x9 mm2
10x10 mm2
11x11 mm2
12x12 mm2
13x13 mm2

50
Figura 41 - Deslocamento do sensor com bossa em cruz e área 9x9 mm.
Na figura seguinte (Figura 42), com o sensor de 11x11 mm², regista-se o aumento do
deslocamento vertical da estrutura (17 µm).

51
Figura 42 - Deslocamento do sensor com bossa em cruz e área 11x11 mm.
Por fim, na figura 43 tem-se para o sensor de 13x13 mm², novo aumento do
deslocamento como esperado, para um valor de 26,4 µm.

52
Figura 43 - Deslocamento do sensor com bossa em cruz e área 13x13 mm.
Após fazer as várias análises estruturais, fez-se o tratamento dos dados recolhidos. No
gráfico da figura 44 abaixo, verificam-se menores deslocamentos da estrutura ao longo do seu
comprimento. Os valores são os mais baixos de todos simulados até ao momento. Conclui-se
portanto, que o deslocamento da estrutura aumenta com a pressão aplicada e, com o aumento
da área. O valor do deslocamento diminui com o aumento da espessura.

53
Figura 44 - Deslocamento ao longo do comprimento do sensor com bossa em cruz (espessura 2 mm).
Análise Eletrostática
Depois de verificar o comportamento das estruturas simuladas, o passo seguinte foi
fazer a análise eletrostática das mesmas. Para ambas as estruturas, foi utilizada uma área
sensorial de 9x9 mm² e 13x13 mm² (área menor e maior respetivamente) e a espessura das
placas de poliuretano de 2 mm. O parâmetro a variar é a pressão aplicada sobre os sensores,
variando desde 0 a 170 kPa. No gráfico da figura 45, pode-se observar a variação da capacidade
com a variação da pressão aplicada sobre o sensor com bossa simples. A capacidade aumenta
gradualmente com a variação aplicada, o que é esperado, pois o deslocamento vertical da
estrutura faz com que a distância entre os elétrodos diminua, causando o aumento. A variação
da capacidade, ΔC, é maior no sensor com área de 13x13 mm². Os deslocamentos aumentam
com o aumento da área sensorial, o que faz com que o gap entre os elétrodos diminui e o valor
da capacidade aumenta.
-20,0µ
-10,0µ
0,0
-8m -7m -6m -5m -4m -3m -2m -1m 0 1m 2m 3m 4m 5m 6m 7m 8m
Comprimento (m)
De
slo
ca
me
nto
(m
)
9x9 mm2
10x10 mm2
11x11 mm2
12x12 mm2
13x13 mm2

54
Figura 45 - Variação da capacidade do sensor com bossa ao centro e área 13x13 mm.
Na figura seguinte (Figura 46) tem-se o resultado da análise para o sensor com bossa
em cruz. Verifica-se uma menor variação da capacidade com o aumento da pressão em relação
à estrutura anteriormente simulada. Para os sensores com área de 13x13 mm², temos uma
variação de capacidade de menos de 0,5 pF, enquanto no gráfico anterior verificou-se uma
variação acima de 1 pF. Isto deve-se ao facto das deslocações verticais da estrutura com bossa
em cruz serem menores que na estrutura com bossa simples, como se pode observar nas
análises estruturais já realizadas. Como a distância entre elétrodos é maior neste caso, as
variações da capacidade são menores.
0 10k 20k 30k 40k 50k 60k 70k
2,0p
3,0p
4,0p
5,0p
6,0p
7,0p
8,0pC
ap
acita
nce
(F
)
P = P-P0 (Pa)
9x9 mm2
13x13 mm2

55
Figura 46 - Variação da capacidade do sensor com bossa em cruz.
As simulações destas geometrias (com bossa simples e cruzada) permitem tirar algumas
conclusões. Comparativamente aos diafragmas simples, os deslocamentos destas geometrias
são muito inferiores, e o deslocamento maior deixa de ocorrer ao centro da estrutura. Porém, a
nível electrostático as sensibilidades são inferiores, e viram-se menores variações na capacidade
para as mesmas variações de pressão.
4.4 Escolha da Placa de Aquisição da Dados
A escolha da placa de aquisição foi feita tendo em conta alguns critérios, como o seu
consumo, largura de banda, a sua gama dinâmica e a resolução.
A placa escolhida, apresentada na figura 47, é uma Evaluation Board AD7150 da
ANALOG DEVICES [19]. Esta placa de avaliação contém um Capacitance-to-Digital Converter
(CDC), o AD7150 [20]. O conversor, de baixa potência, contém 2 canais de entrada que
0 10k 20k 30k 40k 50k 60k 70k
2,0p
3,0p
4,0p
5,0p
6,0pC
ap
acita
nce
(F
)
P = P-P0 (Pa)
9x9 mm2
13x13 mm2

56
permitem fazer a leitura de dados. A placa liga ao computador pela porta USB, e a visualização
de dados em tempo real é feita através de um software que é fornecido com a placa.
Figura 47 - Evaluation Board AD7150.
O AD7150 opera com uma tensão de alimentação entre 2,7 V a 3,6 V e consome uma
corrente reduzida, na ordem de 100 µA. O tempo de resposta do conversor é de 10 ms.
A nível de características o AD7150 tem uma sensibilidade de 2 fF, uma resolução de 1
fF e uma gama dinâmica total de 16,5 pF.
Funcionamento do CDC
Na figura 48, tem-se um diagrama de blocos simplificado do AD7150, que de uma
forma simples representa o seu funcionamento com leitura num dos canais disponíveis.

57
Figura 48 - Diagrama do CDC AD7150.
Temos um condensador flutuante com capacidade ligado a um dos canais e é
aplicada uma corrente de excitação sobre o condensador. A carga aplicada em é amostrada
continuadamente através de um modulador. O filtro digital presente no CDC processa os dados e
vai comunicar com um microprocessador através da interface série I²C.
Na figura 48, verifica-se que a capacidade lida varia entre 0 pF e 4 pF. Este valor
corresponde à gama dinâmica do CDC. Porém, este valor pode atingir os 16,5 pF através de um
CAPDAC no AD7150. Este pode ser visto como uma capacidade negativa ligada ao canal de
entrada CIN, e ao qual vai ajustar um offset até 12,5 pF sobre o valor da capacidade.
O CDC comunica com um microprocessador, permitido através da interface série I²C. A
comunicação é feita com o microprocessador utilizando as ligações SDA (dados) e SCL (clock). O
SDA faz a transferência dos dados enquanto o SCL sincroniza o emissor e o recetor durante a
transferência dos dados.
Com base nos resultados obtidos, construiu-se um protótipo da plataforma sensorial
com as dimensões de acordo com o processo de fabrico da PCB e os resultados obtidos nas
análises feitas aos modelos analíticos e na construção dos modelos em elementos finitos.

58
Capítulo 5
Fabrico e Caracterização
5.1 Fabrico dos Sensores
A impressora foi recentemente adquirida pela Universidade do Minho, e uma vez que a
curva de aprendizagem na sua manipulação tem-se revelado lenta, não foi possível obter durante
o tempo de execução deste trabalho substratos impressos usando a impressora.
Para resolver este problema, procedeu-se à realização manual dos sensores. Em
primeiro lugar, recortaram-se pequenos quadrados de poliuretano, de acordo com as dimensões
de cada orifício na PCB flexível. Os quadrados de poliuretano foram posteriormente colados
sobre cada lado da PCB formando a estrutura do condensador, usando ar como o dielétrico
entre eles. Antes disso, utilizou-se tinta de prata condutora para pintar os elétrodos sobre as
placas de poliuretano. Ao pintar os elétrodos, o poliuretano apresentava uma ligeira curvatura (a
tinta de prata apresenta bastante stress, o que altera significativamente as propriedades
mecânicas do conjunto) sendo por isso necessário pintar ambas as faces dos quadrados, e
consequentemente diminuir a curvatura. Por fim, após a pintura dos elétrodos, colaram-se
ambos os quadrados sobre a PCB flexível. Na figura 49, podemos ver os sensores construídos. O
próximo passo consistiu em introduzir a plataforma sensorial numa câmara de pressão, onde
foram aplicadas pressões positivas sobre os sensores.

59
Figura 49 - Plataforma sensorial com sensores fabricados manualmente.
Antes de proceder à leitura das capacidades na câmara de pressão, fizeram-se alguns
testes prévios, de modo a adquirir alguma experiência com a placa de aquisição de modo a
preparar o plano experimental a executar. Ligou-se um dos sensores a um dos canais da
Evaluation Board e passou-se a um primeiro teste dos sensores. Na figura seguinte (Figura 50),
temos uma imagem da interface gráfica do software que permite fazer a visualização das
capacidades lidas em tempo real. Do lado esquerdo da imagem, tem-se o valor em tempo real
(Data), o valor médio das leituras e o valor do offset da capacidade (CAPDAC). Através do
mesmo software, é possível alterar vários parâmetros relativamente ao CDC, como a
sensibilidade, a gama dinâmica ou até ajustar o offset da capacidade recorrendo ao Setup
AD7150.
Podemos ver na imagem, que há uma leitura da capacidade num dos sensores no canal
CH1 em que se verifica uma transição descendente do seu valor. Foi colocado uma pressão com
o dedo sobre o sensor lido, e a partir do momento em que essa pressão foi retirada, o valor da
capacidade diminuiu.

60
Figura 50 - Interface gráfica do software do AD7150.
5.2 Planeamento Experimental
Os testes à plataforma sensorial foram realizados recorrendo a uma câmara de pressão,
onde foram aplicadas pressões positivas sobre a plataforma. Na figura 51, podemos ver toda a
montagem necessária para fazer as medições das capacidades dos sensores.
A plataforma é inserida no interior da câmara de pressão, que depois é selada pela
tampa de acrílico. Ar comprimido é fornecido à câmara de pressão, e regulado através de um
manómetro. A pressão no interior é monitorizada através de um sensor de pressão, que faz
leituras de pressão entre 1 e 2 bar.
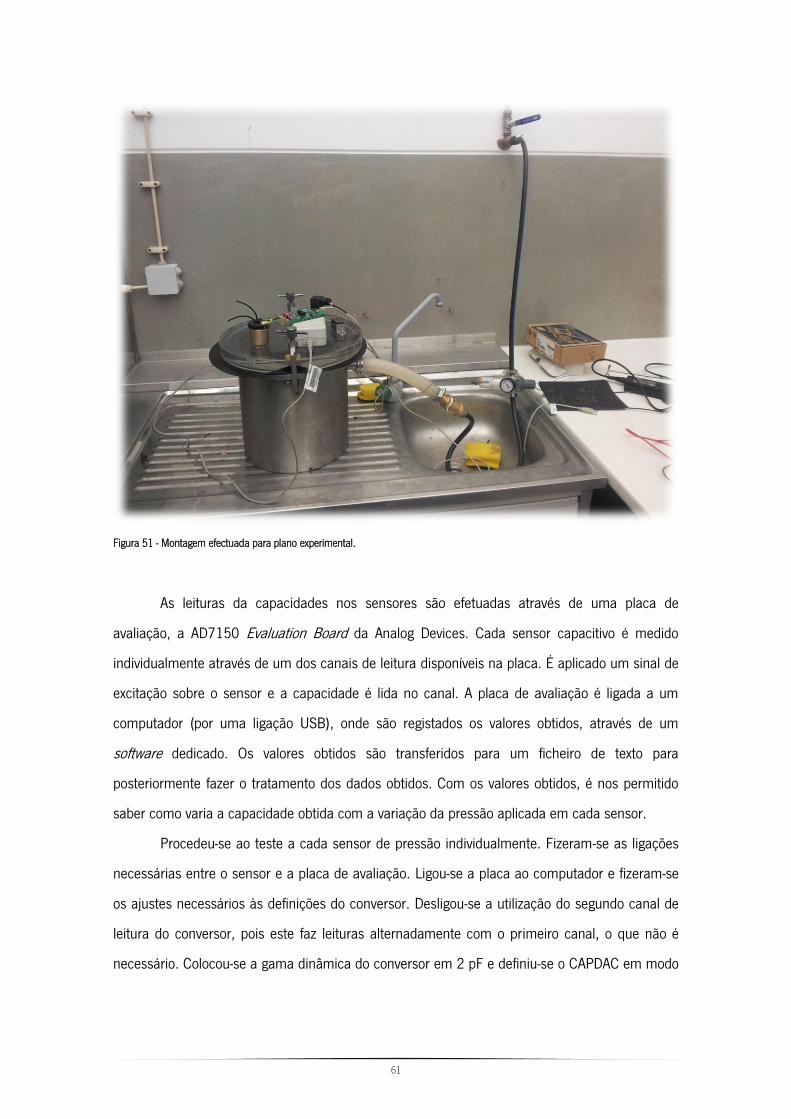
61
Figura 51 - Montagem efectuada para plano experimental.
As leituras da capacidades nos sensores são efetuadas através de uma placa de
avaliação, a AD7150 Evaluation Board da Analog Devices. Cada sensor capacitivo é medido
individualmente através de um dos canais de leitura disponíveis na placa. É aplicado um sinal de
excitação sobre o sensor e a capacidade é lida no canal. A placa de avaliação é ligada a um
computador (por uma ligação USB), onde são registados os valores obtidos, através de um
software dedicado. Os valores obtidos são transferidos para um ficheiro de texto para
posteriormente fazer o tratamento dos dados obtidos. Com os valores obtidos, é nos permitido
saber como varia a capacidade obtida com a variação da pressão aplicada em cada sensor.
Procedeu-se ao teste a cada sensor de pressão individualmente. Fizeram-se as ligações
necessárias entre o sensor e a placa de avaliação. Ligou-se a placa ao computador e fizeram-se
os ajustes necessários às definições do conversor. Desligou-se a utilização do segundo canal de
leitura do conversor, pois este faz leituras alternadamente com o primeiro canal, o que não é
necessário. Colocou-se a gama dinâmica do conversor em 2 pF e definiu-se o CAPDAC em modo

62
automático, sendo que o seu valor é incrementado automaticamente quando o valor lido está
acima de 75% do valor da gama dinâmica e decrementa quando está abaixo de 25% do valor.
Através do manómetro, aumentou-se a pressão do ar comprimido a entrar na câmara de
pressão. Aumentou-se a pressão aplicada em incrementos de 0,1 bar até chegar a 2 bar de
pressão no interior da câmara. Ao mesmo tempo, fez-se a monitorização do sensor no
computador e procedeu-se à exportação dos dados adquiridos para um ficheiro de texto para
posterior análise (Log Data to File).
5.3 Caracterização dos Sensores
Na tabela 3, temos o valor das capacidades lidas nos sensores de acordo com a sua
área e com a variação da pressão aplicada. Podemos constatar que os valores medidos (em
amplitude) para o sensor com área de 11x11 mm² são maiores que os registados para o sensor
com área de 12x12 mm².
Tabela 3 - Valor das capacidades lidas nos sensores.
Capacidade (em pF)
Área do Sensor 9x9 mm² 10x10mm² 11x11 mm² 12x12 mm² 13x13 mm²
Pressão (bar)
1 0,5413 1,1922 13,5336 12,6184 14,0023
1,2 0,5427 1,1987 13,5479 12,6371 14,0183
1,3 0,54404 1,1994 13,5534 12,6444 14,0318
1,4 0,5444 1,2012 13,555 12,6489 14,0399
1,5 0,5448 1,2016 13,5565 12,6537 14,0486
1,6 0,5455 1,2021 13,5574 12,6625 14,0542
1,7 0,5456 1,2049 13,5586 12,6643 14,0566
1,8 0,5464 1,2068 13,5592 12,66605 14,0575
1,9 0,5473 1,2078 13,5602 12,6696 14,0601
2 0,5475 1,2093 13,5619 12,6746 14,0629
Esperava-se um aumento dos valores lidos nos sensores com o aumento da pressão,
que de acordo com a tabela se pode comprovar. Contudo, a amplitude maior das capacidades
medidas do sensor com área de 11x11 mm² relativamente ao de 12x12 mm² não se traduz
numa variação da capacidade maior com a variação de pressão. O gráfico da figura 52 ilustra a

63
variação da capacidade ΔC com a variação da pressão. Verificou-se que a variação da
capacidade com a variação da pressão (ΔP) é maior no sensor de 12x12 mm²
comparativamente ao de 11x11 mm². Pelo mesmo gráfico, concluímos que a variação da
capacidade com a variação da pressão aumenta com a área do sensor, o que era esperado.
Para o sensor de 9x9 mm², obteve-se uma variação da capacidade de 6,12 fF. Para o sensor de
10 mm², obteve-se uma variação de 17,1 fF. No caso do sensor de 11x11 mm², cuja amplitude
da capacidade medida era maior que o de 12 mm², obteve-se uma variação de 28,3 fF. O
sensor de 12 mm² obteve uma variação de 56,2 fF e por fim, o de maior área obteve a maior
variação, no valor de 60,6 fF.
Figura 52 - Variação da capacidade dos sensores com variação da pressão aplicada.
Os valores da capacidade dos sensores lidos foram bastante diferentes do esperado. Isto
deve ser entendido por um conjunto de acontecimentos. Como os sensores foram fabricados
manualmente, foi muito difícil controlar a quantidade de tinta condutora em cada um dos
sensores. A tinta foi colocada sobre ambos os lados do substrato de poliuretano, aumentando a
sua espessura e contribuindo para a alteração das suas propriedades. O facto de os sensores
terem sido colados também influencia os valores da capacidade. A quantidade de cola usada
1,0 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2,00,0
10,0f
20,0f
30,0f
40,0f
50,0f
60,0f
70,0f
C
= C
- C
F
)
P (bar)
9mm2
10mm2
11mm2
12mm2
13mm2

64
varia de sensor para sensor. Para além de alterar as propriedades do poliuretano, criou
irregularidades na superfície da estrutura e aumentou a distância entre os elétrodos. O aumento
dessa distância, provoca uma diminuição no valor da capacidade obtida. A existência de ruído
também contribuiu para os valores inesperados, havendo influência de capacidades parasitas. O
facto de a plataforma estar longe do conversor contribuiu para o aumento de ruído nas leituras.
Contudo, o comportamento dos sensores foi o esperado. Esperava-se um aumento da
variação da capacidade obtida com a variação da pressão aplicada sobre os sensores, com esse
valor a aumentar com o aumento da área sensorial.

65
Capítulo 6
Conclusões e Trabalho Futuro
O objetivo deste trabalho passava pela conceção, modelação e fabrico de um conjunto
de sensores de pressão flexíveis capacitivos. Foram abordados todos os passos envolvidos,
desde a especificação das dimensões dos sensores, da análise de modelos comportamentais até
à construção.
A revisão da leitura foi essencial para a execução do trabalho. Assim, foi possível adquirir
noções deste tipo de aplicações, contribuindo com todos os fundamentos teóricos necessários
para a sua realização.
Fizeram-se várias análises comportamentais e construiu-se um protótipo de uma
plataforma sensorial com base nos resultados obtidos das análises aos modelos analíticos e aos
modelos em elementos finitos. A construção dos sensores implicava o uso de um novo método
de fabrico, sendo que todas as definições e especificações tiveram origem nas restrições do
processo. A construção dos sensores foi feita de forma manual, e pode-se concluir que o
processo de fabrico é rápido e simples.
Por fim, fez-se a caracterização dos sensores construídos, tendo-se verificado o seu
correto funcionamento. Esperava-se um aumento da sensibilidade do sensor com o aumento da
variação de pressão. Verificou-se também um aumento da sensibilidade de acordo com o
aumento da área sensorial. Porém, não foi possível comparar os valores esperados com os
valores experimentais obtidos. O fabrico manual dos sensores contribuiu com um conjunto de
incertezas no comportamento dos sensores, desde a alteração das características do material
até a uma incerteza quanto à distância inicial entre os elétrodos e a sua área efetiva.
Em conclusão deste trabalho, foi elaborado um artigo submetido à conferência I2MTC
[21].

66
Para trabalho futuro, recomenda-se a integração de toda a eletrónica de leitura na
plataforma sensorial. Assim, poderão ser diminuídos os efeitos de capacidades parasitas obtidas
quando das leituras. Sugere-se também a construção de novas geometrias e fazer a comparação
com as geometrias que foram escolhidas para o plano experimental.

67
Referências [1] S. Beeby, G. Ensell, M. Kraft, N. White, MEMS Mechanical Sensors, 2004. ISBN 1-58053-536-4; [2] Editado por Mohamed Gad-el-Hak, The MEMS Handbook, CRC Press, 2001. ISBN 0-8493-0077-0; [3] H.Chau & K.D. Wise, An Ultra-Miniature Solid State Pressure Sensor for a Cardiovascular Catheter, 1988. IEEE Transactions on Electron Devices Volume 35 Nº12; [4] S. Saleh et al., Modeling of Sensitivity of Fabricated Capacitive Pressure Sensor, 2006. IEEE; [5] E.Pritchard et al., Flexible Capacitive Sensors for High Resolution Pressure Measurement, 2008. IEEE Sensors Conference; [6] C.M.A. Ashruf, "Thin flexible pressure sensors", 2002 Sensor Review, Vol. 22 Iss: 4 pp. 322 - 327 ; [7] H.B Muhammad et al., Development of a bioinspired MEMS based capacitive tactile sensor for a robotic finger, 2010; [8] F. Castelli, An Integrated Tactile-Thermal Robot Sensor with Capacitive Tactile Array, 2002. IEEE Transactions on Industry Applications, Vol. 38 Nº1; [9] D.Ha, W. N. de Vries, S.W.M. John, P.P. Irazoqui,W.J. Chappell, Polymer-based miniature flexible capacitive pressure sensor for intraocular pressure (IOP) monitoring inside a mouse eye, 2011; [10] M. Ahmed, D. P. Butler, Z. Celik-Butler, MEMS Absolute Pressure Sensor on a Flexible Substrate, University of Texas, 2012. IEEE; [11] Munnangi et al., CMOS Capacitive Pressure Sensor Design and Integration with RFID Tag for Biomedical Applications, Indian Institute of Technology; [12] Yamamoto et al., Touch Mode Capacitive Pressure Sensor for Passive Tire Monitoring System, 2002. IEEE; [13] F. M. Yaul, V. Bulovic & J. H. Lang, A Flexible Underwater Pressure Sensor Array Using a Conductive Elastomer Strain Gauge, 2012. Journal of Microelectromechanical Systems, Vol. 21, Nº4;

68
[14] Y. Hotta , Y. Zhang, N. Miki, A Flexible Capacitive Sensor with Encapsulated Liquids as Dielectrics, 2012, Micromachines Vol.3, pp. 137-149; [15] Gregory T. A. Kovacs, Micromachined Tansducers Sourcebook, WCB/McGrawHill, 1998. ISBN 0-07-290722-3; [16] A.T. Sepúlveda, A.J. Pontes, J.C. Viana, R. Guzman de Villoria, F. Fachin, B.L. Wardle and L.A. Rocha, “Flexible sensor for blood pressure measurement” in Proc. EMBC’11, Boston, USA, August 30 – September 3 2011 [17] Minco Flex Circuits Design Guide, disponível online em http://www.minco.com/flex/; [18] Stephen D. Senturia, Microsystem Design, Kluwer Academic Publishers, 2001. ISBN 0-792-7246-8; [19] AD7150 Evaluation Board User Guide, UG-086, ANALOG DEVICES; [20] AD7150 Data Sheet , ANALOG DEVICES; [21] S. Cruz, N. J. Vieira, J. C.Viana and L. A. Rocha, Low Cost Pressure Mapping Platform for Mobility Monitoring Applications , submetido à conferência I2MTC, 2012


















