
UNIVERSIDADE DO VALE DO ITAJAÍ - UNIVALIsiaibib01.univali.br/pdf/Juliana Jacomini Menegucci.pdf ·...
89
UNIVERSIDADE DO VALE DO ITAJAÍ - UNIVALI CENTRO DE CIÊNCIAS TECNOLÓGICAS DA TERRA E DO MAR - CTTMAR CURSO DE OCEANOGRAFIA JULIANA JACOMINI MENEGUCCI METODOLOGIA PARA CORREÇÃO DA MARÉ EM LEVANTAMENTOS DE LINHA DE COSTA COM DGPS-RTK: ESTUDO DE CASO NA ENSEADA DO ITAPOCORÓI, SANTA CATARINA, BRASIL ITAJAÍ, SANTA CATARINA 2011
Transcript of UNIVERSIDADE DO VALE DO ITAJAÍ - UNIVALIsiaibib01.univali.br/pdf/Juliana Jacomini Menegucci.pdf ·...

UNIVERSIDADE DO VALE DO ITAJAÍ - UNIVALI
CENTRO DE CIÊNCIAS TECNOLÓGICAS DA TERRA E DO MAR - CTTMAR
CURSO DE OCEANOGRAFIA
JULIANA JACOMINI MENEGUCCI
METODOLOGIA PARA CORREÇÃO DA MARÉ EM LEVANTAMENTOS DE
LINHA DE COSTA COM DGPS-RTK: ESTUDO DE CASO NA ENSEADA DO
ITAPOCORÓI, SANTA CATARINA, BRASIL
ITAJAÍ, SANTA CATARINA
2011

ii
UNIVERSIDADE DO VALE DO ITAJAÍ - UNIVALI
CENTRO DE CIÊNCIAS TECNOLÓGICAS DA TERRA E DO MAR - CTTMAR
CURSO DE OCEANOGRAFIA
JULIANA JACOMINI MENEGUCCI
METODOLOGIA PARA CORREÇÃO DA MARÉ EM LEVANTAMENTOS DE
LINHA DE COSTA COM DGPS-RTK: ESTUDO DE CASO NA ENSEADA DO
ITAPOCORÓI, SANTA CATARINA, BRASIL
TRABALHO DE CONCLUSÃO APRESENTADO AO
CURSO DE OCEANOGRAFIA, COMO REQUISITO
PARCIAL PARA OBTENÇÃO DO GRAU DE
OCEANÓGRAFA.
ORIENTADOR: MSC. RAFAEL SANGOI ARAUJO
ITAJAÍ, SANTA CATARINA
2011
iii
NOTA:
O presente documento – Trabalho de
Conclusão de Curso (TCC) – faz parte do
processo de avaliação da disciplina Projeto de
Graduação do curso de Oceanografia da
Universidade do Vale do Itajaí (UNIVALI), o
qual possui os seguintes objetivos:
Proporcionar aos acadêmicos, condições
complementares de atividades de
aprendizagem teóricas e práticas nos
diferentes campos de atuação profissional;
Proporcionar condições para que os
acadêmicos formados desenvolvam atitudes e
hábitos profissionais, bem como adquiram,
exercitem e aprimorem seus conhecimentos;
Estimular a especialização em um campo
de atividade específica;
Promover a integração entre o acadêmico
formado e o mercado de trabalho.
O TCC é resultado do trabalho do aluno,
executado sob orientação de um professor. Por
ter como finalidade uma documentação de
aprendizado, não se trata de uma publicação
científica estrito senso, sendo assim, os
métodos empregados, resultados e conclusões
obtidas, devem ser considerados dentro deste
contexto. Maiores informações sobre o
conteúdo específico do documento podem ser
obtidas com o autor ou o professor orientador
do trabalho.

iv
A meus pais Adair e Marli, a minha
avó Valdeonida, e a meu irmão
Fabio. Minha família, meu porto
seguro!

v
AGRADECIMENTOS
A meus pais, Adair e Marli, por fazerem todo o possível, e por vezes até mesmo o impossível,
para que eu e meu irmão realizássemos todos os nossos sonhos. Obrigado pela educação, pelo
carinho, pela atenção, pelo apoio, e por me permitirem escolher meu próprio caminho.
Independente de onde eu vá parar daqui pra frente, sei que vocês estarão sempre comigo, amo
muito vocês!
A minha avó Valdeonida, minha segunda mãe, que mesmo não acreditando muito na minha
escolha, sempre acreditou em mim e no meu potencial. Obrigada por estar sempre presente, e
por nunca medir esforços em me ajudar.
A meu irmão Fabio, pela cumplicidade, pelo carinho e pela amizade, enfim, por ser um irmão
de verdade, com o qual eu posso contar sempre, te amo Bill!
Aos meus tios, Magali e Rubens, por me incentivarem sempre, e por se fazerem presentes
apesar de toda a distância que nos separa, amo vocês!
Ao Thiago, não por isso, ou por aquilo, mas por TUDO! Desde a amizade no início da
faculdade, até o companheirismo, o amor e a atenção dedicada nestes últimos anos. É muito
bom saber que tenho você do meu lado.
A todo o pessoal que se dispôs a ir a campo comigo (no fim das contas, isso tudo é sobre
amizade), e sem os quais este trabalho não seria concluído: a Jaque, pela ajuda em campo, nas
duvidas no decorrer do trabalho, e pelos momentos no LOG; a Débora, por ter deixado de
trabalhar no seu TCC, para me acudir no campo; ao Marquinhos por estar presente em todos
os campos; a Carol e a Pri, por caminharem quase 20 km comigo no campo do primeiro
projeto; ao Thiago por ter tomado chuva lendo a régua de maré no trapiche; e finalmente ao
grande amigo Vitão, por ter lido a régua de maré o dia todo, não só uma, mas duas vezes, por
SEMPRE estar disposto a ajudar, por todas as contribuições no decorrer de todo o trabalho, e
pela amizade verdadeira durante todos estes anos, obrigado por ser o amigo com quem eu sei
que posso contar sempre!
Ao Professor Klein, por ter me permitido fazer parte do grupo de oceanografia geológica, o
que por consequência, abriu muitas portas para o meu futuro profissional.
Ao orientador Rafael Sangoi, por ter financiado os campos e disponibilizado o equipamento, e
também pelas contribuições na correção do trabalho.

vi
Aos professores Thadeu e Léo Lince, pela disposição em ajudar sempre.
A todo o pessoal que fez parte do LOG enquanto eu estive por lá, em especial ao Vinicius,
pela ajuda com a programação de uma das rotinas.
A Coastal Planning e Engineering, pela oportunidade de estágio, e a todo o pessoal da
empresa, em especial ao Rodrigo Barletta, por acreditar e apostar no meu potencial, e por todo
o aprendizado adquirido e compartilhado durante todos estes meses.
A Vanessa, Jaque, Andressa, pela amizade, e a todos os amigos do curso, principalmente aos
que entraram comigo em 2006/1, pelos maravilhosos primeiros semestres.
Ao Nélinho, por ter me ensinado a mergulhar de verdade, e por me ter “adotado” enquanto eu
estive longe de casa, em uma ilha no meio do Atlântico.
Ao Google, pelo buscador que facilitou a busca por grande parte das pesquisas bibliográficas
referentes a este trabalho, e também durante todo o decorrer da faculdade.
E finalmente, a força maior que move o universo seja ela quem ou o que for; e ao mar, por
toda a sua beleza e imponência, e por ainda me fascinar como quando eu era criança, mesmo
depois de todos estes anos.

vii
“I'm finally free…
It's only the ocean and me.”
Only the Ocean - Jack Johnson

viii
RESUMO
A linha de costa pode ser definida como a fronteira física entre a terra e a água, estando assim,
sujeita a variações devido aos processos dinâmicos que atuam sobre este ambiente (e.g., maré,
ondas, vento). Tendo em conta a natureza dinâmica desta fronteira, o trabalho proposto tem
como objetivo principal desenvolver uma metodologia para correção do nível de maré em
levantamentos de linha de costa com DGPS-RTK, utilizando o limite de runup instantâneo
como indicador da linha de costa. A metodologia consiste na coleta em campo de dados de
entrada para rotinas computacionais desenvolvidas em ambiente MATLAB®, e testadas para
três praias em diferentes estágios morfodinâmicos (dissipativas, intermediária e reflectiva),
durante períodos de maré de sizígia e de quadratura. Também foram testados dois diferentes
métodos para coleta de declividade (coleta com clinômetro, e através de perfis na zona de
espraiamento). Os resultados obtidos, foram analisados por meio de testes estatísticos não-
paramétricos. O teste de Kruskal-Wallis e o teste a posteriori de Dunn, mostraram que as
áreas dissipativa e reflectiva são estatisticamente iguais, diferindo da área intermediária. Os
resultados obtidos apontaram que as declividades coletados com clinômetro representaram
melhor a morfologia das praias, resultando em uma redução de erros quando comparados com
os parâmetros estatísticos obtidos com os dados corrigidos com os dados de perfis. A rotina
de correção considera uma praia ideal, assim, quanto mais a praia analisada de aproximar dos
pressupostos considerados por esta, maior será a capacidade da rotina em reproduzir a posição
da linha de costa corrigida. As praias que mais se aproximaram da “praia ideal”, apresentando
os menores valores de erro nos parâmetros estatísticos medidos para o presente trabalho,
foram as áreas dissipativa e reflectiva.
Palavras-chave: nível de maré; declividade; limite de runup instantâneo; praias arenosas;
estágio morfodinâmico.
ix
SUMÁRIO
AGRADECIMENTOS ............................................................................................................. v
RESUMO ................................................................................................................................ viii
LISTA DE FIGURAS .............................................................................................................. xi
LISTA DE TABELAS ........................................................................................................... xiv
1. INTRODUÇÃO .................................................................................................................. 15
2. OBJETIVOS ....................................................................................................................... 17
2.1. OBJETIVO GERAL ............................................................................................................... 17
2.2. OBJETIVOS ESPECÍFICOS ................................................................................................ 17
3. FUNDAMENTAÇÃO TEÓRICA .................................................................................... 18
3.1. CONCEITOS AMBIENTAIS ............................................................................................... 18
3.1.1. LINHA DE COSTA ....................................................................................................... 18
3.1.2. INDICADORES DA LINHA DE COSTA ................................................................. 18
3.1.3. MORFODINÂMICA DE PRAIAS ARENOSAS ..................................................... 20
3.2. CONCEITOS METODOLÓGICOS .................................................................................... 22
3.2.1. DGPS-RTK ..................................................................................................................... 22
3.3. CONCEITOS MATEMÁTICOS .......................................................................................... 25
3.3.1. EQUAÇÃO DA RETA.................................................................................................. 25
3.3.2. INTERSECÇÃO ENTRE RETAS ............................................................................... 26
3.3.3. DISTÂNCIAS DE PONTO A RETA E PONTO A PONTO .................................. 26
4. METODOLOGIA .............................................................................................................. 28
4.1. REGIÃO DE ESTUDO ......................................................................................................... 28
4.1.1. PRAIA ALEGRE .................................................................................................. 31
4.1.2. PRAIA DE PIÇARRAS E ITAJUBA ................................................................... 31
4.1.3. CONDICIONANTES METEOROLÓGICAS E HIDRODINÂMICA ................ 31
4.2. COLETA DE DADOS ........................................................................................................... 32
4.2.1. EQUIPAMENTOS UTILIZADOS ....................................................................... 32
4.2.2. AQUISIÇÃO ......................................................................................................... 33
4.2.2.1. LIMITE DE RUNUP INSTANTÂNEO ............................................................. 36
4.3. TRATAMENTO DOS DADOS ........................................................................................... 36

x
4.4. CORREÇÃO DOS DADOS ................................................................................................. 38
4.4.1. CONFECÇÃO DA ROTINA DE CORREÇÃO (CLC) ....................................... 40
4.4.2. CONFECÇÃO DA ROTINA DE INTERPOLAÇÃO (ILC)................................ 43
4.4.3. CONFECÇÃO DA ROTINA DE VALIDAÇÃO (VLC) ..................................... 45
4.5. ANÁLISES ESTATÍSTICAS ............................................................................................... 46
4.5.1. TESTES ESTATÍSTICOS .................................................................................... 46
4.5.2. PARÂMETROS ESTATÍSTICOS ....................................................................... 47
5. RESULTADOS .................................................................................................................. 49
5.1. DADOS DE CAMPO ............................................................................................................. 49
5.2. APLICAÇÃO DA METODOLOGIA ................................................................................. 50
5.3. ANÁLISES ESTATÍSTICAS ............................................................................................... 57
5.4. PARÂMETROS ESTATÍSTICOS ....................................................................................... 59
6. DISCUSSÃO ....................................................................................................................... 64
7. CONSIDERAÇÕES FINAIS ............................................................................................ 67
8. REFERÊNCIAS BIBLIOGRÁFICAS ............................................................................. 69
APÊNDICE A ......................................................................................................................... 74
APÊNDICE B .......................................................................................................................... 79
APÊNDICE C ......................................................................................................................... 82
APÊNDICE D ......................................................................................................................... 83
APÊNDICE E .......................................................................................................................... 84

xi
LISTA DE FIGURAS
FIGURA 1. Esboço da relação espacial entre os indicadores de linha de costa mais comumente
utilizados por pesquisadores (adaptado de BOAK & TURNER (2005)). ................................ 19
FIGURA 2. Classificação morfodinâmica de praias desenvolvida por WRIGHT & SHORT (1984)
(adaptado de SILVEIRA (2008)). ............................................................................................ 20
FIGURA 3. DGPS-RTK Trimble R6. .......................................................................................... 23
FIGURA 4. Variação do PDOP em função da geometria dos satélites, em (A) tem-se uma
menor diluição da precisão dos satélites, já em (B) a área onde o ponto pode estar
localizado é maior, resultando em uma menor precisão. .................................................... 24
FIGURA 5. Localização das áreas de estudo na Enseada do Itapocorói, Projeção UTM - Zona
22 S, Datum SAD 1969. ....................................................................................................... 28
FIGURA 6. A1, porção central da praia Alegre, entre P 03 e P 02 (Fonte: Débora Alves,
29/04/2011). ......................................................................................................................... 29
FIGURA 7. A2, zona sul da praia de Piçarras, entre P 07 e P 05 (Fonte: Débora Alves,
29/04/2011). ......................................................................................................................... 30
FIGURA 8. A3, zona norte da praia de Itajuba, entre P 53 e P 52 (Fonte: Débora Alves,
29/04/2011). ......................................................................................................................... 30
FIGURA 9. Aquisição de dados de linha de costa com DGPS-RTK em modo cinemático, com
aparelho acoplado as costas do operador (Fonte: Débora Alves, 29/04/2011). ................ 33
FIGURA 10. À esquerda, base fixada no RN do molhe do rio Piçarras, à direita, RN do P 53
no norte da praia de Itajuba (Fonte: Autora, 09/12/2010). ................................................ 34
FIGURA 11. Régua para monitoramento do nível da maré durante os levantamentos (Fonte:
Autora, 09/12/2010 e 29/04/2011). ...................................................................................... 35
FIGURA 12. Clinômetro de nível, utilizado para definir a declividade ao longo da zona de
espraiamento dos trechos analisados (Fonte: Autora, 09/12/2010). .................................. 35
FIGURA 13. Caminhamento sobre o limite de runup instantâneo para aquisição da linha de
costa na A2, zona sul da praia de Piçarras (Fonte: Débora Alves, 29/04/2011). .............. 36
FIGURA 14. Fluxograma da metodologia de correção dos dados. ........................................... 39

xii
FIGURA 15. Direção da praia para dado de entrada na rotina. ............................................... 41
FIGURA 16. Esquematização do funcionamento da rotina de correção (CLC). ....................... 43
FIGURA 17. Esquematização do funcionamento da rotina de interpolação (ILC). .................. 44
FIGURA 18. Dados de linha de costa coletados com DGPS-RTK na A1 no dia 09/12/2010 e
dados modelados/corrigidos com as rotinas CLC e ILC. .................................................... 51
FIGURA 19. Dados de linha de costa coletados com DGPS-RTK na A1 no dia 29/04/2011 e
dados modelados/corrigidos com as rotinas CLC e ILC. .................................................... 52
FIGURA 20. Dados de linha de costa coletados com DGPS-RTK na A2 no dia 04/04/2011 e
dados modelados/corrigidos com as rotinas CLC e ILC. .................................................... 53
FIGURA 21. Dados de linha de costa coletados com DGPS-RTK na A2 no dia 29/04/2011 e
dados modelados/corrigidos com as rotinas CLC e ILC. .................................................... 54
FIGURA 22. Dados de linha de costa coletados com DGPS-RTK na A3 no dia 04/04/2011 e
dados modelados/corrigidos com as rotinas CLC e ILC. .................................................... 55
FIGURA 23. Dados de linha de costa coletados com DGPS-RTK na A3 no dia 29/04/2011 e
dados modelados/corrigidos com as rotinas CLC e ILC. .................................................... 56
FIGURA 24. Variação total e erro entre a linha corrigida pela rotina CLC e a medida em
campo (interpolada pela rotina ILC) na praia Alegre (A1) durante maré de sizígia. ........ 60
FIGURA 25. Variação total e erro entre a linha corrigida pela rotina CLC e a medida em
campo (interpolada pela rotina ILC) na praia Alegre (A1) durante maré de quadratura. 60
FIGURA 26. Variação total e erro entre a linha corrigida pela rotina CLC e a medida em
campo (interpolada pela rotina ILC) na região sul da praia de Piçarras (A2) durante maré
de sizígia. ............................................................................................................................. 61
FIGURA 27. Variação total e erro entre a linha corrigida pela rotina CLC e a medida em
campo (interpolada pela rotina ILC) na região sul da praia de Piçarras (A2) durante maré
de quadratura. ..................................................................................................................... 61
FIGURA 28. Variação total e erro entre a linha corrigida pela rotina CLC e a medida em
campo (interpolada pela rotina ILC) na praia de Itajuba (A3) durante maré de sizígia.... 62
FIGURA 29. Variação total e erro entre a linha corrigida pela rotina CLC e a medida em
campo (interpolada pela rotina ILC) na praia de Itajuba (A3) durante maré de
quadratura. .......................................................................................................................... 62

xiii
FIGURA 30. Variação do nível da maré medida em campo (astronômica + meteorológica) no
dia 09/12/2010, e previsão de maré (astronômica) de acordo com a DNH. ....................... 83
FIGURA 31. Variação do nível da maré medida em campo (astronômica + meteorológica) no
dia 04/04/2011, e previsão de maré (astronômica) de acordo com a DNH. ....................... 83
FIGURA 32. Variação do nível da maré medida em campo (astronômica + meteorológica) no
dia 29/04/2011, e previsão de maré (astronômica) de acordo com a DNH. ....................... 83
FIGURA 33. Gráficos dos perfis realizados ao longo da zona de espraiamento da área 1, com
as equações das retas que serviram de base para determinação das declividades. ........... 87
FIGURA 34. Gráficos dos perfis realizados ao longo da zona de espraiamento da área 2, com
as equações das retas que serviram de base para determinação das declividades. ........... 88
FIGURA 35. Gráficos dos perfis realizados ao longo da zona de espraiamento da área 3, com
as equações das retas que serviram de base para determinação das declividades. ........... 89

xiv
LISTA DE TABELAS
TABELA 1. Classificação do por intervalos segundo WALSTRA et al. (2001). ............... 47
TABELA 2. Nível da maré durante a aquisição das linhas de costa. ........................................ 49
TABELA 3. Teste de Kruskal-Wallis para comparação entre as diferentes áreas. ................... 57
TABELA 4. Teste de Dunn a posteriori. .................................................................................... 57
TABELA 5. Teste U de Mann-Whitney para comparação entre dados de maré de sizígia e de
maré de quadratura. ............................................................................................................ 58
TABELA 6. Teste de Wilcoxon para comparação entre as linhas corrigidas com as
declividades coletadas por clinômetro (Dc), e calculadas por meio de perfis na zona de
espraiamento (Dp). .............................................................................................................. 58
TABELA 7. Erro absoluto gerado pelo operador durante a aquisição das linhas de costa. .... 59
TABELA 8. Parâmetros estatísticos calculados para as diferentes áreas de estudo, em
diferentes condições de maré. .............................................................................................. 59
TABELA 9. Parâmetros estatísticos das linhas de costa para as diferentes áreas, corrigidas
com diferentes metodologias de coleta de declividade. ....................................................... 63
TABELA 10. Dados de declividade utilizados para correção das linhas de costa da área A1
(Alegre). ............................................................................................................................... 84
TABELA 11. Dados de declividade utilizados para correção das linhas de costa da área A2
(Piçarras - Sul). ................................................................................................................... 85
TABELA 12. Dados de declividade utilizados para correção das linhas de costa da área A3
(Itajuba). .............................................................................................................................. 86

15
1. INTRODUÇÃO
Áreas costeiras possuem natureza dinâmica com mudanças ocorrendo em diferentes escalas
de tempo (MOORE, 2000). Para fins políticos e jurídicos, é necessário o conhecimento preciso
destas mudanças, inclusive da posição e das taxas de recuo ou avanço da linha de costa, pois
estes proporcionam um suporte confiável para os tomadores de decisão, responsáveis pela
gestão sustentável do litoral. Assim, a ciência do mapeamento de linhas de costa ganhou
muita importância, e sofreu mudanças significativas nas ultimas décadas (CROWELL, 2006).
Os estudos progrediram, não só com os avanços na tecnologia, mas também com a
necessidade de reduzir incertezas, e embora tenham resultado em melhorias no processamento
de dados costeiros, a mudança frequente da tecnologia dificultado o surgimento de um
método padrão de mapeamento de costa (MOORE, 2000).
Na realidade, a posição da linha de costa muda continuamente no tempo, devido ao transporte
de sedimento pela costa e ao longo da mesma, e especialmente por causa da natureza
dinâmica dos níveis de água na fronteira com a costa (e.g., ondas, marés, lençol freático,
tempestades, setup, runup, etc.). Assim, a linha de costa deve ser considerada em escala
temporal, e a escala escolhida vai depender do contexto da investigação (BOAK & TURNER,
2005).
Diferentes métodos possuem suas capacidades únicas, assim como deficiências (ADDO et al.,
2008). As técnicas de detecção variam de acordo com a fonte de dados e da definição de linha
de costa escolhida (BOAK & TURNER, 2005). No entanto, para se obter uma alta precisão, são
necessários cuidados especiais com alguns aspectos como: identificação e definição do
indicador escolhido, correta abordagem deste no tempo e espaço, metodologia empregada
para aquisição de dados e utilização de softwares para contabilizar as variações entre as
épocas de levantamento. Quanto se considera todos estes fatores, os resultados gerados podem
servir como uma importante ferramenta para cientistas, engenheiros e a gestão costeira em
geral.
PARKER (2006) cita que a detecção precisa de avanços ou recuos na linha de costa, necessita
de uma técnica de medição consistente para que as mudanças aparentes, não sejam apenas
manifestações de inconsistências na técnica adotada.
Dentre as fontes de dados disponíveis para detecção da linha de costa, as mais comumente
utilizadas são fotografias aéreas e imagens de satélite, e mais atualmente levantamentos com

16
GPS diferencial (DGPS). Segundo ROCHA et al. (2009a), essa tecnologia já vem sendo
aplicada a programas de gerenciamento costeiro em várias partes do mundo.
O DGPS (“Differential Global Positioning System”) é um método que permite aumentar
significativamente a precisão do aparelho receptor GPS (“Global Positioning System”) por
corrigir a posição deste, adicionando uma estação de referência, situada em um ponto fixo de
coordenadas conhecidas. Assim, é possível obter pontos com coordenadas precisas
diretamente sobre a feição escolhida como indicador. Levantamentos realizados com DGPS
podem ser em tempo real (por exemplo, no modo RTK – “Real Time Kinematics”) ou pós-
processado. Nos levantamentos em tempo real, o aparelho receptor fica capacitado para
posicionamento preciso no local e na hora do procedimento (TRIMBLE, 2010). Com estes
avanços tecnológicos aliados aos levantamentos costeiros, agora é possível monitorar grandes
áreas costeiras com alta resolução e precisão, o DGPS apresenta-se muito útil para
caracterizar a evolução costeira em escalas espaciais pequenas (BAPTISTA et al., 2007).
Para além da escolha da fonte de dados, uma consideração fundamental para o mapeamento
de linhas de costa é o indicador de linha de costa escolhido. Um indicador ideal deve ser
facilmente identificado no campo e em fotografias aéreas e imagens de satélite em qualquer
praia (LEATHERMAN, 2003).
Grande parte dos pesquisadores costeiros e agências governamentais, nomeadamente nos
Estados Unidos, usam a linha de preamar (HWL – “High Water Line”) porque esse indicador
é visível no campo e pode ser facilmente interpretado em fotografias aéreas e imagens de
satélite. Para estes fins, considera-se que a linha de maré mais alta, coincide com a interface
areia seca/molhada, e que as marcas desta, não variam ao longo do levantamento. (STOCKDON
et al., 2002; LEATHERMAN, 2003; BOAK & TURNER, 2005; RUGGIERO & LIST, 2009). No
entanto, sabe-se, que embora em fotografias e imagens de satélite a interface areia
seca/molhada não sofra variação significativa, por ter sido aquisitada em um dado momento
no tempo, em levantamentos de campo, ela varia sua posição no tempo durante um ciclo de
maré, assim, para levantamentos em campo, coletar dados pela interface ao longo do dia pode
introduzir erros adicionais, devido a esta variação em função da maré e temperatura enquanto
a linha é aquisitada.
Neste contexto, o presente trabalho, tem por finalidade desenvolver uma metodologia para
correção da maré em levantamentos de linha de costa com DGPS-RTK, utilizando como
indicador o limite de runup instantâneo, isso porque, este, varia proporcionalmente com a
maré, podendo assim, posteriormente ser corrigido para representar a linha de maré mais alta.
17
2. OBJETIVOS
2.1. OBJETIVO GERAL
Desenvolver uma metodologia para correção da maré na posição da linha de costa em
levantamentos com DGPS-RTK utilizando o limite de runup instantâneo como indicador da
linha de costa, em um estudo de caso na Enseada do Itapocorói.
2.2. OBJETIVOS ESPECÍFICOS
Desenvolver uma rotina no software MATLAB® para correção automática da posição da
linha de costa de acordo com variações no nível da maré.
Avaliar por meio de parâmetros estatísticos a capacidade da rotina em reproduzir a posição
real de linha de costa medida em campo.
Testar se a metodologia funciona de modo similar em praias dissipativas, intermediárias e
reflectivas por meio de testes estatísticos.
Testar se a metodologia funciona de modo similar durante períodos de maré de sizígia e
maré de quadratura por meio de testes estatísticos.
Testar diferentes métodos de coleta de declividade da praia para a correção da linha de
costa por meio de testes e parâmetros estatísticos.
Determinar a escala temporal a qual o método melhor se adequa.

18
3. FUNDAMENTAÇÃO TEÓRICA
3.1. CONCEITOS AMBIENTAIS
3.1.1. LINHA DE COSTA
A linha de costa é uma das feições geomorfológicas mais dinâmicas do planeta (ROCHA et al.,
2009b). Pode ser definida como a interface física entre a terra e a água (BOAK & TURNER,
2005), ou seja, é o limite entre o continente e a porção adjacente ao mar onde não há efetiva
ação marinha no alcance máximo das ondas, e geralmente é bem demarcada por uma feição
(SUGUIO & MARTIN, 1992).
Embora todas as definições representem por fim a mesma informação simples é um grande
desafio medir a linha de costa de forma verdadeiramente consistente ao longo de toda a orla,
ou a costa de um município ou estado (PARKER, 2006), assim, usualmente envolve um
numero de pressupostos, portanto, todas as estimativas irão possuir erros associados
provenientes da técnica adotada e da percepção do indicador (STOCKDON et al., 2002).
O conhecimento da posição geográfica da linha de costa é fundamental para o adequado
gerenciamento dos espaços costeiros. Para tal, a definição escolhida deve considerar o litoral,
tanto no sentido temporal quanto espacial e deve ter em conta a dependência dessa
variabilidade na escala de tempo pelo qual ele está sendo investigado (ROCHA et al., 2009a).
3.1.2. INDICADORES DA LINHA DE COSTA
Devido à impossibilidade de aquisitar a linha de costa ideal, para propósitos práticos,
pesquisadores tipicamente adotam o uso de indicadores da linha de costa (BOAK & TURNER
2005).
Indicadores podem ser feições geomorfológicas, ou elevações verticais específicas, utilizadas
para representar a posição da linha de costa. Existe uma variedade deles (Figura 1), e entre
todos os possíveis indicadores relatados por BOAK & TURNER (2005) em sua revisão, os mais
comumente utilizados são: linha de preamar (HWL – “High Water Line”), linha de
espraiamento das ondas (limite de runup instantâneo), escarpa da praia, linha de detritos
(tempestades) e linha de contorno da vegetação da praia, ou ainda, em se tratando de

19
elevações verticais especificas, a média de maré mais alta (MHWL – “Mean High Water
Line”), é comumente utilizada em cartas náuticas por exemplo.
Figura 1. Esboço da relação espacial entre os indicadores de linha de costa mais comumente
utilizados por pesquisadores (Fonte: adaptado de BOAK & TURNER (2005)).
Contudo, alguns desses indicadores, devido a sua inerente metamorfose, precisam estar
referidos no tempo e no espaço, como é o caso da linha de preamar e da linha de baixamar, já
outros, são sazonais e/ou descontínuos, variando de acordo com a geomorfologia da praia,
como é o caso da linha de contorno da vegetação, escarpa da praia, linha de detritos, entre
outros, que só podem ser aplicados em praias específicas, onde suas marcas permanecerem
nítidas (ROCHA et al. 2009a).

20
3.1.3. MORFODINÂMICA DE PRAIAS ARENOSAS
Os estudos pioneiros sobre morfodinâmica de praias de WRIGHT & SHORT (1984), foram
revisados por CALLIARI et al. (2002) e SHORT (2006) com aplicação para o litoral brasileiro.
Estes serviram como base para o desenvolvimento de um modelo que representa os estados
morfodinâmicos das praias arenosas de costas dominadas por ondas, como é o caso da região
de estudo. Estes estados são compostos pelos extremos reflectivo e dissipativo, com quatro
estados intermediários (Figura 2).
Figura 2. Classificação morfodinâmica de praias desenvolvida por WRIGHT & SHORT (1984) (Fonte:
adaptado de SILVEIRA (2008)).

21
SHORT (2006) apresenta a classificação dos tipos de praias, de acordo com o estágio
morfodinâmico em que estas se encontram:
Praias Dissipativas – O estado dissipativo é representado por zonas de surfe muito
desenvolvidas (> 100m), em decorrência da incidência de ondas de alta energia e/ou do
tamanho de grão, que varia de areia muito fina a areia fina. O pequeno tamanho de grão faz
com que a praia se apresente com baixa declividade (<3º). O tipo de quebra de onda é
predominantemente deslizante e normalmente não ocorrem correntes de retorno muito
persistentes. Sistemas de bancos múltiplos são observados frequentemente.
Praias Intermediárias – Os estados intermediários são caracterizados pela presença de
feições rítmicas, como bancos e cúspides. São geralmente compostas por areia média,
apresentando uma declividade moderadamente acentuada. Como são quatro os estados
intermediários, há uma gradação entre eles quanto às suas tendências dissipativas ou
refletivas. Os quatro estados intermediários são:
Banco e Cava Longitudinais – Apresentam uma morfologia de banco e cava
longitudinais bem definida, sendo mais pronunciada que no estado dissipativo. As ondas
quebram no banco, se reformam na cava e voltam a quebrar na zona de espraiamento.
Em alguns casos ocorrem cúspides e correntes de retorno.
Banco e Praia Rítmicos – A praia e os bancos apresentam formas rítmicas, mas ainda
apresentando uma cava longitudinal definida. As correntes de retorno tendem a ocorrer
com maior intensidade.
Banco Transversal e RIP – Os bancos rítmicos se soldam à praia, sendo algumas vezes
interrompidos por correntes de retorno muito desenvolvidas.
Crista e Canal/Terraço de Maré Baixa – Apresenta um banco longitudinal soldado,
resultando em um perfil plano na maré baixa e com a face da praia íngreme (maré alta).
Praias Reflectivas – O estado refletivo é representado pela quase ausência de zona de
surfe, ocorrendo a quebra das ondas na face da praia, com grande turbulência. Essas praias
frequentemente apresentam cúspides. A porção da face da praia apresenta uma declividade
acentuada (>8º), sendo geralmente composta de areia grossa. Esse tipo de praia é mais
associado a locais com baixa energia de ondas, mas também ocorrem em regiões expostas.
Segundo KLEIN (2004), em praias de enseada, como há variação no grau de exposição às
ondas ao longo da praia, esta pode assumir diferentes características morfodinâmicas em

22
diferentes pontos. A região protegida (curva) tende a ser mais refletiva, uma vez que está
sujeita a ondas menores, já a região mais distante do promontório tende a ser mais retilínea e
dissipativa, podendo apresentar sistemas de bancos múltiplos na porção submersa desse
segmento praial.
No entanto, KLEIN & MENEZES (2001) sustentam que tanto nas regiões protegidas como nas
expostas, o tipo de praia depende do tamanho do grão de sedimento disponível. Os mesmos
autores, ainda constatam que o estado morfodinâmico das praias é dependente do contexto
geológico da área (e.g., presença/distância entre promontórios e sua orientação, morfologia da
praia e da plataforma interna, morfologia da planície costeira e da fonte/tipo de sedimento) e
de fatores hidrodinâmicos (e.g. altura de quebra, período, variação relativa da maré e
processos de empinamento, refração, difração e cisalhamento).
3.2. CONCEITOS METODOLÓGICOS
3.2.1. DGPS-RTK
Várias técnicas de posicionamento têm sido desenvolvidas para explorar a capacidade que o
GPS (“Global Positioning System”) possui em prover coordenadas precisas com um pequeno
intervalo de tempo de coleta de dados, ou até mesmo quando o receptor está se movendo ao
longo de uma trajetória (DALBELO, 2010).
Uma das diferenças entre o posicionamento estático e o cinemático refere-se à acurácia
factível de ser obtida em cada um deles. Segundo SEEBER (2003), no posicionamento GPS
estático os erros aleatórios de medição são absorvidos pelos resíduos após o ajustamento,
enquanto no posicionamento cinemático a maior parte dos erros aleatórios é absorvida pelas
coordenadas.
Um dos métodos de posicionamento que tem se destacado desde a concepção do sistema GPS
é o DGPS (“Differential Global Positioning System”). No DGPS tem-se como principio
básico assumir uma alta correlação dos erros (e.g. ionosfera; troposfera; e órbita dos satélites)
em uma determinada área de abrangência. Este método foi desenvolvido inicialmente com o
intuito de minimizar o efeito da SA (“Selective Availability”). O SA tratava-se de um
programa que manipulava as efemérides transmitidas pelos satélites e desestabilizava
sistematicamente os osciladores dos satélites, o que provocava uma degradação no

23
posicionamento para usuários GPS não autorizados. Com a desativação do SA, a precisão do
posicionamento obtido com o DGPS foi melhorada (DALBELO, 2010).
Em linhas gerais, a estrutura DGPS consegue fornecer informações precisas ao usuário a
respeito de sua localização através do emprego de estações base ou de referência fixas. A
estação, fixada em um ponto de coordenadas precisamente conhecidas, monitoram os satélites
disponíveis em tempo integral e repassa “valores corrigidos” ao receptor GPS, a transmissão é
feita por links de rádio que operam em baixa frequência. O GPS indica posição (x, y, z) com
respeito a um elipsoide, por isso cada nação utiliza o elipsoide que melhor se adéqua a sua
localização geoidal, sendo necessário informar ao aparelho, o datum a ser utilizado.
O Receptor, ou GPS Móvel, pode ser utilizado em três modos de levantamento, Estático,
Estático Rápido (“stop-and-go”) e Cinemático. No modo cinemático o aparelho pode
aquisitar pontos em intervalos de tempo, ou intervalos de espaço pré-definidos.
O modo estático é utilizado para transferências de referências de nível (RN’s) por permitir a
coleta de pontos com precisão elevada. Perfis topográficos comumente são feitos em modo
estático rápido, onde são medidos pontos espaçados. Já levantamentos tridimensionais são
feitos no modo cinemático, onde o aparelho pode coletar dados com intervalo de até 1
segundo. Nos levantamentos em tempo real com DGPS-RTK (Figura 3), os dados não
necessitam de pós-processamento, fornecendo os arquivos de saída já corrigidos.
Figura 3. DGPS-RTK Trimble R6 (Fonte: TRIMBLE (2010)).

24
Uma das dificuldades inerentes à utilização de GPS em modo diferencial cinemático, com
antena adaptada as costas do observador por meio de uma mochila, prende-se com a eventual
redução da precisão do sistema. Havendo uma só antena, a relação entre a posição do solo e a
da antena apenas pode ser aproximada pela subtração, na direção da vertical do local, da
altura da antena ao solo (supostamente conhecida e constante). Os desvios relativos à vertical
são provocados pela inclinação do terreno e o próprio movimento de caminhar do observador
(BAPTISTA et al., 2007).
O deslocamento do equipamento móvel deve sempre ser feito com cuidado para que o eixo
longitudinal não seja demasiadamente movido em relação ao eixo perpendicular a Terra. Isso
evita a perda de comunicação com os satélites e, consequentemente, perda de precisão do
dado coletado. A precisão da posição indicada pelo aparelho depende da Diluição de Precisão
da Posição (PDOP). Essa diluição é calculada pela posição (geometria) dos satélites, e é a
relação adimensional do erro da posição do usuário e do satélite (Figura 4). Valores de PDOP
menores que 4,0 são aceitáveis, sendo que, quanto menor o valor, maior precisão da posição
(TRIMBLE, 2010).
Figura 4. Variação do PDOP em função da geometria dos satélites, em (A) tem-se uma menor
diluição da precisão dos satélites, já em (B) a área onde o ponto pode estar localizado é maior,
resultando em uma menor precisão (Fonte: Autora).
PAJAK & LEATHERMAN (2002) concluíram que o método DGPS-RTK, é mais preciso
que o método de fotografias aéreas por se adquirir mais dados em menor tempo, e com maior
precisão.
(A) (B)

25
3.3. CONCEITOS MATEMÁTICOS
3.3.1. EQUAÇÃO DA RETA
Do ponto de vista da Geometria Euclidiana, dados dois pontos ( , ) e ( , ) no plano
cartesiano, existe uma única reta que passa por esses pontos. Para determinação da equação
geral desta reta, utilizam-se os conceitos relacionados a matrizes. Na determinação da
equação na forma da Equação 1, aplica-se a regra de Sarrus, utilizada na obtenção do
determinante (Equação 2) de uma matriz quadrada de ordem 3 x 3. Para tal, são necessários
no mínimo dois pares ordenados ( , ) dos possíveis pontos alinhados, por onde a reta irá
passar.
Abaixo, é apresentada a matriz geral da determinação da equação geral, nela entram os pares
ordenados que devem ser informados: ( , ) e ( , ) e um ponto genérico representado
pelo par ( , ). Observe que a 3º coluna da matriz é completada com o algarismo .
(Equação 1)
[
] (Equação 2)
↓
[( ) ( ) ( )] [( ) ( ) ( )]
Através do cálculo do coeficiente angular (Equação 3), e do coeficiente linear (Equação
4) de uma reta, é possível obter a equação reduzida da reta, dada pela Equação 5.
( )
( ) (Equação 3)
(Equação 4)

26
(Equação 5)
O coeficiente angular da reta é o ângulo de inclinação em radianos entre a reta e o eixo do
plano cartesiano. Já o coeficiente linear, constitui o valor da ordenada da reta para a qual a
abscissa é nula.
3.3.2. INTERSECÇÃO ENTRE RETAS
Duas retas são concorrentes se, e somente se, possuírem um ponto em comum, ou seja, um
ponto de intersecção. O sistema formado com as equações gerais das retas (Equação 1)
concorrentes terá como solução o par ordenado ( , ) que representa o ponto de intersecção.
No plano cartesiano, duas retas e serão perpendiculares se possuírem um ponto comum e
nesse encontro for formado um ângulo de 90°. Para determinar se duas retas são
perpendiculares ou não, não é necessário representa-las no plano cartesiano, basta comparar
seus coeficientes angulares (Equação 3). As duas retas serão perpendiculares se, somente se,
seus coeficientes angulares forem iguais ao oposto do inverso do outro coeficiente, ou seja:
para , .
3.3.3. DISTÂNCIAS DE PONTO A RETA E PONTO A PONTO
A distância ( ) entre um ponto e uma reta no plano cartesiano é calculada unindo o próprio
ponto à reta através de um segmento, que deverá formar com a reta um ângulo de 90º. Para
estabelecer a distância entre os dois é utilizada a equação geral da reta (Equação 1) e as
coordenadas ( , ) do ponto na Equação 6, a seguir:
√( ) (Equação 6)
Para determinar se o ponto ( , ) se encontra acima ou abaixo da reta , basta sabermos o
valor da coordenada da reta, para , assim, caso o valor de ( ( )) seja maior que
, o ponto se encontra abaixo da reta, caso contrario, a posição do ponto é superior a da reta.

27
Para o cálculo (Equação 7), é utilizado o coeficiente angular (Equação 3) e o coeficiente
linear (Equação 4) da reta.
( ) (Equação 7)
A distância entre dois pontos no plano cartesiano é a hipotenusa do triângulo retângulo
formado pelos pares ordenados ( , ) e ( , ). Assim, esta pode ser calculada aplicando-
se o Teorema de Pitágoras (Equação 8).
(( ) ( )
) (Equação 8)
Dois pontos no plano cartesiano podem constituir um segmento de reta. Um segmento de reta
possui inúmeros pontos alinhados, mas somente um deles irá dividir o segmento em duas
partes iguais. Portanto, considerando o ponto médio do segmento formado pelos pares
ordenados ( , ) e ( , ), a seguinte expressão matemática (Equação 9) irá determinar a
coordenada do ponto médio de qualquer segmento no plano cartesiano:
(
) (Equação 9)
É possível perceber que o cálculo da abscissa é a média aritmética entre as abscissas dos
pontos 1 e 2. Assim, o cálculo da ordenada é a média aritmética entre as ordenadas dos
pontos 1 e 2.

28
4. METODOLOGIA
4.1. REGIÃO DE ESTUDO
A região de estudo compreende a Enseada do Itapocorói, localizada no litoral centro-norte do
Estado de Santa Catarina, e composta pelas praias: Alegre, Piçarras e Itajuba (Figura 5).
Figura 5. Localização das áreas de estudo na Enseada do Itapocorói, delimitadas a partir de RN’s pré-
existentes nas praias. Projeção UTM - Zona 22 S, Datum SAD 1969.
29
A praia Alegre, com aproximadamente 900 metros de extensão, pertence ao município de
Penha, e está situada na porção sul da enseada, delimitada ao sul pelo promontório rochoso da
Ponta da Penha, e ao norte pela foz do rio Piçarras.
Não existe delimitação física entre as praias de Piçarras e Itajuba, assim, estas são delimitadas
pelo limite municipal das cidades a qual pertencem, Balneário Piçarras, e Barras Velha,
respectivamente. As praias como um todo, possuem aproximadamente 8,5 quilômetros de
extensão. Piçarras é delimitada ao sul pela desembocadura do rio Piçarras, e Itajuba ao norte
pelo promontório rochoso de Itajuba.
Para os levantamentos foram delimitadas três áreas, com faixas de aproximadamente 200
metros de linha de costa, dentro da região de estudo (Figura 5). Estas foram escolhidas de
acordo com a caracterização morfológica do local. A delimitação foi feita a partir de perfis
pré-existentes nas praias, assim, os números dos pontos mostrados, é padronizado com estes.
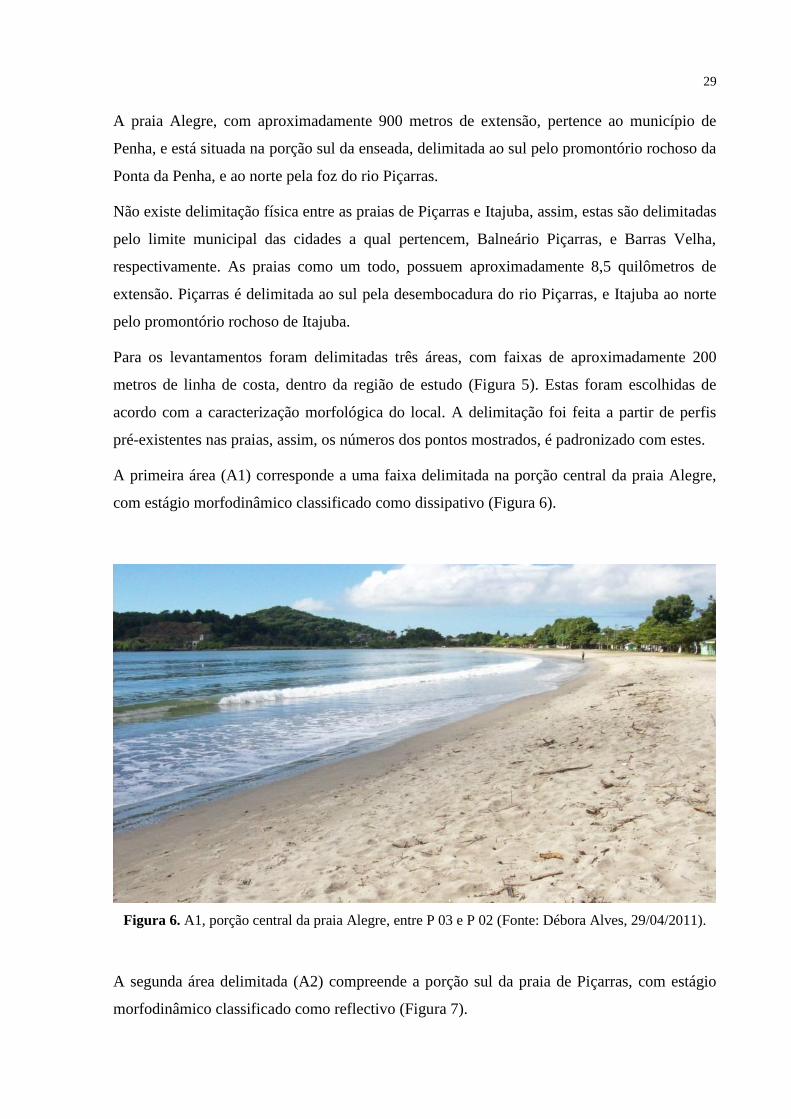
A primeira área (A1) corresponde a uma faixa delimitada na porção central da praia Alegre,
com estágio morfodinâmico classificado como dissipativo (Figura 6).
Figura 6. A1, porção central da praia Alegre, entre P 03 e P 02 (Fonte: Débora Alves, 29/04/2011).
A segunda área delimitada (A2) compreende a porção sul da praia de Piçarras, com estágio
morfodinâmico classificado como reflectivo (Figura 7).

30
Figura 7. A2, zona sul da praia de Piçarras, entre P 07 e P 05 (Fonte: Débora Alves, 29/04/2011).
A terceira área de estudo (A3) compreende uma região classificada como intermediária
(Figura 8), localizada na porção mais ao norte da praia de Itajuba.
Figura 8. A3, zona norte da praia de Itajuba, entre P 53 e P 52 (Fonte: Débora Alves, 29/04/2011).
31
4.1.1. PRAIA ALEGRE
A praia Alegre, localizada na porção sul da Enseada do Itapocorói, é protegida da incidência
das ondas provenientes dos quadrantes sul e sudeste pela Ponta da Penha, ficando a região
norte da enseada exposta a níveis crescentes de energia de onda (HOEFEL, 2008).
A praia demonstra ser uma região mais estável, apresentando baixas taxas de variabilidade
volumétrica, podendo ser classificada morfologicamente como uma praia em estágio
dissipativo (KLEIN & MENEZES, 2001; ARAUJO, 2008; CAMARGO, 2009). De acordo com
SPROVIERI (2008) que analisou a composição do sedimento na enseada, a praia Alegre
apresenta composição predominante de areia fina, com alguns traços de areia muito fina.
4.1.2. PRAIA DE PIÇARRAS E ITAJUBA
É caracterizada como uma grande praia de enseada, assumindo forma parabólica entre os
promontórios rochosos de Itajubá ao norte e Ponta da Penha ao sul. As características das
praias ao longo da enseada apresentam distintas variações de volume e largura subaéreas. A
partir da desembocadura do rio Piçarras em direção ao norte, a morfologia apresenta alta taxa
de variabilidade volumétrica, devido à maior exposição ao regime energético incidente de
ondas (KLEIN & MENEZES, 2001; ARAUJO, 2008; CAMARGO, 2009).
A porção ao sul (Piçarras) encontra-se semi-abrigada das ondulações de sul e sudeste,
enquanto a parte central e norte (Itajuba) encontram-se mais expostas ao ataque das ondas
(KLEIN & MENEZES, 2001; ARAUJO, 2008). Assim, o estágio morfodinâmico das praias foi
definido como variando entre reflectivo semi-exposto na parte sul (Piçarras), e reflectivo
exposto a intermediário em direção a parte norte (Itajuba) (CAMARGO, 2009).
No que diz respeito à sedimentologia, SPROVIERI (2008), classificou a região sul (Piçarras)
como composta predominantemente de areia média, na região central de areia fina, e no setor
norte (Itajuba), composta de areia fina e areia média.
4.1.3. CONDICIONANTES METEOROLÓGICAS E HIDRODINÂMICA
As regiões, tanto central como norte da Enseada de Itapocorói possuem maior declividade em
relação à região sul, devido a maior proximidade entre as isóbatas batimétricas nessas áreas
(SPROVIERI, 2008). A batimetria é modificada pela presença da Ilha Feia, adjacente ao
segmento sul da enseada e pela Laje do Jaques, situada ao norte da enseada.

32
O quadro atmosférico típico da região é caracterizado pelo regime de ventos provenientes do
quadrante nordeste durante todo ano, associados com o efeito local das brisas, influenciados
pela propagação de ciclones extratropicais, que se intensificam nos meses de inverno e
primavera, alterando a meteorologia local, e aumentando a importância dos ventos
provenientes do quadrante sul (TRUCCOLO et al., 2000).
Dados referentes ao clima de ondas são escassos para o litoral centro norte de Santa Catarina
(SPROVIERI, 2008), porém, ARAUJO et al. (2003) descreve para a região a ocorrência de um
espectro bimodal bem definido, formado por ondas do tipo “vagas” provenientes do quadrante
leste, com período de 8 segundos e altura significativa de 1,25 metros e, ondas do tipo
marulho, com período de 12 segundos, altura significativa variando de 1,25 metros no verão
até 2 metros no inverno com direção predominante do quadrante sul. Alturas superiores a 4
metros podem ocorrer em todas as estações do ano, porém com baixa frequência e associada a
eventos extremos.
O regime de marés para o litoral centro norte de Santa Catarina é dominado
predominantemente pela componente semi-diurna e possui uma oscilação média de
aproximadamente 0,7 metros, e valores máximos de cerca de 1,06 metros (TRUCCOLO &
SCHETTINI, 1999). A maré meteorológica possui grande importância na dinâmica costeira da
região, podendo aumentar em até um metro os valores da maré astronômica (SCHETTINI et al.,
1996).
4.2. COLETA DE DADOS
Os dados foram coletados em três campanhas de campo, realizadas durante os dias 09 de
dezembro de 2010, 04 de abril de 2011 e 29 de abril de 2011.
4.2.1. EQUIPAMENTOS UTILIZADOS
2 receptores de GPS Trimble® R6;
Coletor de Dados Trimble® TSC2;
Tripé;
Base Niveladora;
Haste Graduada;
Trena;

33
Mochila com suporte para Receptor;
Régua de maré;
Cronômetro;
Clinômetro de nível;
Bloco de Notas e Caneta;
4.2.2. AQUISIÇÃO
Durante cada campanha de campo, foram coletadas duas linhas de costa para cada área de
estudo, uma durante a maré alta, e outra durante a maré baixa.
Os pontos relativos à posição da linha de costa foram aquisitados com DGPS-RTK operando
no modo cinemático, com aquisições em intervalos de 1 segundo, usando como indicador da
linha de costa o limite de runup instantâneo, ao longo das três áreas delimitadas (Figura 9). Os
valores de PDOP foram monitorados, ficando sempre abaixo de 4,0.
Figura 9. Aquisição de dados de linha de costa com DGPS-RTK em modo cinemático, com aparelho
acoplado as costas do operador (Fonte: Débora Alves, 29/04/2011).
O aparelho DGPS-RTK, foi configurado para armazenar dados com coordenadas em projeção
UTM (“Universal Transverse Mercator”), zona 22 Sul, datum SAD 69 (1969). A unidade é o

34
metro tendo como origem o Equador e o Meridiano Central, no hemisfério Sul, o sistema
possui o valor 10.000.000,000 metros no Equador para a coordenada Norte, decrescendo para
o Sul, e o valor 500.000,000 metros no Meridiano Central para a coordenada Este,
decrescendo para Oeste e crescendo para Este. As coordenadas UTM definem posições
bidimensionais e horizontais.
A base do DGPS-RTK foi fixada sobre o RN (Referência de Nível) existente no molhe do rio
Piçarras (Figura 10), para realização dos levantamentos nas áreas 1 e 2, já para os
levantamentos da área 3, devido a distância a que esta se encontra das demais, a base teve que
ser transferida, tendo sido então fixada sobre o RN do ponto P 53 (Figura 10), já presente no
local.
Figura 10. À esquerda, base fixada no RN do molhe do rio Piçarras, à direita, RN do P 53 no norte da
praia de Itajuba (Fonte: Autora, 09/12/2010).
Para o monitoramento da variação do nível da maré durante as campanhas de campo, foi
instalada uma régua de maré em um trapiche junto ao rio Piçarras (Figura 11). O nível da
maré foi medido durante todo o decorrer dos levantamentos em intervalos regulares de 10
minutos.

35
Figura 11. Régua para monitoramento do nível da maré durante os levantamentos (Fonte: Autora,
09/12/2010 e 29/04/2011).
As declividades em graus, das zonas de espraiamento das distintas áreas foram coletadas em
intervalos regulares de 15 metros ao longo dos trechos de praia contemplados no presente
estudo, com auxilio de um clinômetro de nível (Figura 12).
Figura 12. Clinômetro de nível, utilizado para definir a declividade ao longo da zona de espraiamento
dos trechos analisados (Fonte: Autora, 09/12/2010).
Após a variação da maré, uma nova linha de costa, foi coletada em cada área, para ser
utilizada na validação do método.
No campo do dia 29 de abril de 2011, foram realizados perfis paralelos à linha de costa na
zona de espraiamento de todas as áreas, nos mesmos pontos onde a declividade com o

36
clinômetro foi coletada, a fim de determinar qual método melhor representa a declividade do
local. Ainda neste campo, a fim de estimar o erro induzido no levantamento pela
movimentação do operador e sensibilidade deste em seguir o indicador de linha de costa,
foram aquisitadas duas linhas de costa em cada área, durante o mesmo nível de maré.
4.2.2.1. LIMITE DE RUNUP INSTANTÂNEO
Runup é definido por RUGGIERO et al. (2001), como a máxima excursão vertical da onda na
face da praia acima do nível de água. Assim, para os propósitos práticos do presente trabalho,
o limite de runup instantâneo, foi definido como o limite superior do espraiamento, ou
máximo alcance das ondas na face da praia, demarcado pela zona saturada de água na linha de
espraiamento das ondas.
A seguir (Figura 13), são apresentadas imagens representativas do caminhamento sobre o
indicador escolhido.
Figura 13. Caminhamento sobre o limite de runup instantâneo para aquisição da linha de costa na A2,
zona sul da praia de Piçarras (Fonte: Débora Alves, 29/04/2011).
4.3. TRATAMENTO DOS DADOS
O tratamento dos dados para extração de cada uma das linhas de costa, e a interpolação da
declividade para todos os pontos das linhas, foram realizados em ambiente ArcGIS®.

37
Os dados exportados do coletor de dados Trimble®
TSC2 em formato .csv, foram adicionados
no software ArcMap®, para que os pontos de cada linha de costa fossem separados dos
pontos de coleta de declividade, RN’s utilizados, e perfis da zona de espraiamento, nos
levantamentos em que estes foram realizados. Todos os dados foram exportados
separadamente em formato shapefile.
Os pontos (E, N) contendo as posições onde as declividades foram medidas com o clinômetro,
foram editados e receberam os valores de declividade coletados em campo (Dc). Para os
perfis realizados no campo do dia 29 de abril de 2011, os pontos foram graficados no
Microsoft Exel®, com a elevação de cada ponto no eixo das ordenadas, e a distância entre os
pontos no eixo da abcissas. Através da equação da reta proveniente da linha de tendência
linear adicionada ao gráfico no software, a declividade foi determinada (Dp). Estes valores,
também foram atribuídos aos pontos no software ArcMap®.
Foram confeccionados transectos perpendiculares à linha de costa em formato de linha sobre
os pontos de coleta, e estas receberam os valores de declividade (Dc e Dp) dos pontos. As
linhas foram transformadas em pontos equidistantes através da ferramenta Feature
Conversions Convert Features to Points, da extensão XTools Pro® 7.0 para ArcGIS®. Os
pontos foram então interpolados em ambiente ArcMap®, Arc Toolbox Spatial Analyst
Tools Interpolation IDW.
O método de interpolação utilizado foi o IDW (“Inverse Distance Weighting”), que utiliza o
modelo estatístico denominado “Inverso das Distâncias”, baseado na dependência espacial,
isto é, supõe que quanto mais próximo estiver um ponto do outro, maior deverá ser a
correlação entre seus valores, e dessa forma atribui maior peso para as amostras mais
próximas do que para as amostras mais distantes do ponto a ser interpolado. Assim o modelo
consiste em se multiplicar os valores das amostras pelo inverso das suas respectivas distâncias
ao ponto de referência para a interpolação dos valores (VARELLA & SENA JUNIOR, 2010).
Ainda no software ArcMap®, utilizando a ferramenta, Arc Toolbox Spatial Analyst Tools
Extraction Extract Values to Points, os valores de declividade do arquivo raster gerado
pela interpolação, foram extraídos para cada um dos pontos de linha de costa de cada
levantamento.
Para correção dos níveis de maré medidos na régua, foi coletado um ponto com DGPS-RTK
no modo estático acoplado a uma haste com nível. Foi marcada a posição na régua onde esta

38
se encontrava com a base da haste, assim, posteriormente, a diferença entre a elevação do
ponto coletado e a posição marcada na régua foi subtraída dos valores coletados para a maré.
Os arquivos .dbf dos shapefiles de cada levantamento, foram inseridos no software Microsoft
Exel®, para que os pontos de cada levantamento recebessem o valor de elevação da maré, de
acordo com o horário em que foram coletados.
Os dados foram então salvos em arquivo .txt, em formato de matriz com os pontos
sequenciais no sentido anti-horário, contendo as seguintes colunas: X (E (UTM)), Y (N
(UTM)), Z (Metros), Maré (Metros) e Declividade (Graus).
4.4. CORREÇÃO DOS DADOS
A seguir, na Figura 14, é apresentado o fluxograma da metodologia de correção dos dados
obtidos em campo (arquivo .txt):

39
Figura 14. Fluxograma da metodologia de correção dos dados.

40
Para correção da linha de costa da área 1 (A1 – Alegre), foram utilizados os dados coletados
no dia 09 de dezembro de 2010, período de maré de sizígia, e dados de maré de quadratura,
coletados no dia 29 de abril de 2011. Já para as áreas 2 e 3 (A2 – Piçarras Sul e A3 – Itajuba),
foram utilizados dados de linha de costa com maré de sizígia coletados no dia 04 de abril de
2011, e dados de maré de quadratura também do dia 29 de abril de 2011.
Optou-se por utilizar somente um levantamento para cada tipo de maré, sendo então
escolhidos os dados onde houve maior variação entre as duas linhas coletadas, uma na maré
alta, e outra na maré baixa.
A fim de padronizar os resultados, a linha de costa inserida na rotina de correção, foi sempre a
coletada durante a maré mais baixa, independente do horário em que tenha sido aquisitada.
Embora o aparelho GPS operando em modo DGPS-RTK, reduza significativamente o erro de
posicionamento embutido nos dados de linha de costa coletados, a capacidade do operador do
aparelho em identificar e seguir o indicador de linha de costa escolhido, somada as
inclinações do aparelho receptor durante a caminhada, acabam por induzir um erro adicional
nos dados coletados. Assim, a fim de estimar esta incerteza gerada, foi comparado o
posicionamento de duas linhas de costa coletadas durante o mesmo nível de maré em cada
área de estudo.
4.4.1. CONFECÇÃO DA ROTINA DE CORREÇÃO (CLC)
A rotina para correção da posição dos pontos de linha de costa com base na variação do nível
de maré (CLC) foi confeccionada em ambiente MATLAB®, seguindo os fundamentos
básicos da geometria analítica e trigonometria. A rotina CLC, é fornecida no APÊNDICE A.
Dados de Entrada:
DATA = Arquivo .txt do primeiro levantamento contendo: as coordenadas X em UTM (E)
na primeira coluna, as coordenadas Y em UTM (N) na segunda coluna; a elevação Z dos
pontos em metros na terceira coluna; o nível da maré em metros na hora da aquisição dos
pontos na quarta coluna; a declividade (Dc ou Dp) em graus na quinta coluna. Os pontos
necessitam estar organizados sequencialmente e em sentido anti-horário.

41
Parâmetros:
CT = Comprimento em metros desejado para os transectos que serão gerados.
MP = Nível de maré em metros, para o qual se deseja corrigir os pontos.
DIR = Direção, ou orientação da praia (Figura 15), caso a praia esteja compreendida em
mais do que dois quadrantes, será necessário segmentá-la para a análise.
Figura 15. Direção da praia para dado de entrada na rotina.
Passo a Passo do Algoritmo:
Determinação de um ponto médio entre os pontos de linha de costa:
A rotina funciona sempre relacionando o primeiro ponto, com o segundo, o segundo com o
terceiro, e assim por diante. Em linhas gerais, é determinado o ponto médio (PM) através do
segmento de reta entre os pontos P1 e P2. A elevação (ZPM), nível da maré (MPM) e
declividade (DPM) para PM são calculados por interpolação linear.

42
Criação de transectos perpendiculares aos pontos de linha de costa medidos:
A correção do ponto (NP) é feita variando-se o PM sobre um transecto de comprimento CT
perpendicular à linha de costa que corresponde ao segmento de reta formado pelos pontos
P1 e P2, assim, os dois segmentos de reta perpendiculares compartilham o mesmo ponto
médio (PM).
Para determinação dos pontos superior (TS) e inferior (TI) do transecto, são utilizados os
conceitos de equação da reta, coeficiente angular, retas perpendiculares, e teorema de
Pitágoras. Em seguida, é determinado qual ponto (TS ou TI) representará o ponto onshore na
praia (Tonshore), e o ponto offshore (Toffshore), para que o PM possa variar em direção a
um, ou outro, de acordo com a variação positiva ou negativa no nível da maré. Esta
determinação depende da direção determinada para a praia (DIR).
Movimentação dos pontos nos transectos de acordo com a variação da maré:
A correção do PM para o novo ponto (NP) é feita com base na variação da maré, que por
consequência gera uma variação na elevação do NP, assim sabendo-se a declividade da face
praial, é possível determinar a distância entre os pontos PM e NP, através de relações
trigonométricas, e por consequência, a nova posição do NP.
Dados de Saída:
Arquivo .xls com as coordenadas em UTM (x, y) dos transectos Tonshore e Toffshore.
Arquivo .xls com as coordenadas em UTM (x, y, z) dos novos pontos (NP’s) corrigidos.
Na Figura 16 abaixo, é apresentada a esquematização do funcionamento da rotina CLC: em
vermelho estão os pontos originais aquisitados do primeiro levantamento com DGPS-RTK na
área (L1); em seguida, os pontos são ligados por segmentos de reta; são então calculados os
pontos médios (PM’s) dos segmentos (em laranja); em roxo e azul estão os pontos dos
transetos, onshore (Tonshore) e offshore (Toffshore), com comprimento total CT,
perpendiculares aos segmentos de reta gerados e compartilhando o mesmo ponto médio (PM);
em amarelo, é apresentada a nova posição dos pontos (NP) após a correção pela padronização
da maré.

43
Figura 16. Esquematização do funcionamento da rotina de correção (CLC).
4.4.2. CONFECÇÃO DA ROTINA DE INTERPOLAÇÃO (ILC)
A rotina para interpolação dos dados de linha de costa (ILC) que servirão para
posterior comparação com a linha corrigida, e cálculo do erro, foi confeccionada em ambiente
MATLAB®, seguindo os fundamentos básicos da geometria analítica e trigonometria. A
rotina ILC, é apresentada no APÊNDICE B.
Dados de Entrada:
TRANSECTS = Arquivo .xls, dado de saída da rotina de correção, contendo: as
coordenadas X em UTM na primeira coluna, as coordenadas Y em UTM na segunda
coluna dos pontos offshore (Toffshore) dos transectos; nas colunas três e quatro, são
fornecidas as coordenadas X em UTM e Y em UTM dos pontos onshore (Tonshore) dos
transectos respectivamente.
POINTS = Arquivo .txt do segundo levantamento (coletado no mesmo nível de maré
padronizado na rotina anterior) contendo: as coordenadas X em UTM na primeira coluna,
as coordenadas Y em UTM na segunda coluna; a elevação Z dos pontos em metros na
terceira coluna. Não é necessário que os pontos estejam organizados sequencialmente.

44
Passo a Passo do Algoritmo:
Interpolação dos dados coletados em campo para pontos pertencentes às retas dos
transectos:
A rotina funciona calculando a distância a que cada um dos pontos da linha de costa a ser
comparada, se encontram com relação a cada um dos transectos. Para cada transecto
gerado pela rotina CLC, é calculada a distância (pela fórmula de distância entre ponto e
reta), a que cada ponto do segundo levantamento (L2) se encontra do transecto. Utilizando os
dois pontos mais próximos à reta do transecto, um superior e outro inferior, é determinado o
ponto de intersecção entre a reta do transecto e o segmento de reta formado pelos pontos
selecionados (utilizando as equações gerais das retas).
Dados de Saída:
Arquivo .xls contendo as coordenadas em UTM (x, y, z) dos pontos interpolados.
Na Figura 17 abaixo, é apresentada a esquematização do funcionamento da rotina ILC.
Figura 17. Esquematização do funcionamento da rotina de interpolação (ILC).
45
Em verde estão os pontos originais aquisitados com DGPS-RTK no segundo levantamento na
área; são então adicionados os transectos gerados na rotina de correção, com os pontos
onshore e offshore; são então determinados os pontos que mais se aproximam da reta de cada
transecto, um anterior e outro posterior; cria-se um segmento de reta entre os pontos
selecionados, concorrente com a reta do transecto; é então interpolado um ponto (PT) em
verde claro, no local de intersecção entre as retas.
4.4.3. CONFECÇÃO DA ROTINA DE VALIDAÇÃO (VLC)
A rotina de validação (VLC) faz a comparação da linha de costa corrigida (CLC), com os
dados provenientes da linha de costa medida em campo (ILC), através do cálculo do erro,
entre o ponto corrigido e o ponto interpolado para cada transecto.
A rotina foi confeccionada em ambiente MATLAB®, seguindo os fundamentos básicos da
trigonometria. A rotina VLC, é apresentada no APÊNDICE C.
Dados de Entrada:
PADRONIZADO = Arquivo .xls, dado de saída da rotina de correção, contendo: as
coordenadas X em UTM (E) na primeira coluna, as coordenadas Y em UTM (N) na
segunda coluna e a elevação Z na terceira coluna, dos pontos do primeiro levantamento
que foram corrigidos (NP’s) de acordo com o nível de maré do segundo levantamento.
REAL = Arquivo .xls, dado de saída da rotina de interpolação, contendo: as coordenadas
X em UTM (E) na primeira coluna, as coordenadas Y em UTM (N) na segunda coluna e a
elevação Z na terceira coluna, dos pontos do segundo levantamento interpolados para os
transectos (PT’s).
Passo a Passo do Algoritmo:
Cálculo do erro entre ponto corrigido e ponto medido em campo:
A rotina funciona calculando a distância entre cada par de pontos NP e PT, utilizando o
teorema de Pitágoras.

46
Dados de Saída:
Arquivo .xls contendo as coordenadas em UTM (x, y) dos pontos corrigidos, coordenadas
em UTM (x, y) dos pontos interpolados, e o erro (metros) entre a posição de cada par de
pontos.
4.5. ANÁLISES ESTATÍSTICAS
4.5.1. TESTES ESTATÍSTICOS
Na análise de dados de pesquisa, o pesquisador frequentemente precisa decidir se diversas
variáveis independentes devem ou não, ser consideradas como proveniente da mesma
população (SILVA & CÂMARA, 2001).
Frente a impossibilidade de normalização dos dados obtidos, optou-se pela utilização de testes
estatísticos não-paramétricos.
Neste sentido, a fim de verificar a similaridade entre as áreas A1, A2 e A3, foi empregado o
teste de Kruskal-Wallis (ou Análise de Variância por Postos). Diferentemente do que ocorre
com a Análise de Variância de Um Critério (ou ANOVA de Fisher, teste paramétrico), este,
não exige as suposições de normalidade da variável, nem homogeneidade de variâncias entre
os tratamentos. É caracterizado como teste livre de distribuição, ou seja, a distribuição teórica
populacional dos dados não precisa ser estimada pelas médias ou variâncias amostrais para
sua correta aplicação (BIANCONI et al., 2008).
A hipótese a ser testada (H0) é a de que não há nenhuma diferença entre as diferentes áreas
(não existem diferenças entre os tratamentos). Ao se rejeitar H0 em favor de H1, existe ainda o
interesse em saber quais dos tratamentos diferem através de comparações múltiplas, assim, o
emprego de comparações não-paramétricas pode ser encarado como uma complementação ao
teste de Kruskal-Wallis. Dentre os testes de comparações múltiplas não-paramétricos,
destacam-se o proposto por DUNN (1964) apud PONTES & CORRENTE (2001), o teste de Dunn
consiste em testes de comparações múltiplas utilizando atribuição de postos conjunta a todos
os tratamentos.
Para comparação entre os dados coletados durante maré de sizígia, e maré de quadratura, foi
utilizado o teste de U de Mann-Whitney, que tem como objetivo comprovar se dois grupos
independentes foram ou não extraídos de uma população com a mesma mediana.

47
Já para a comparação entre o método de coleta da declividade (clinômetro ou perfil no
espraiamento), foi realizado o teste pareado de Wilcoxon. Este teste é empregado para duas
amostras relacionadas quando se quer determinar, para uma mesma situação, se duas
abordagens, tratamentos ou métodos são diferentes ou se um é melhor que o outro.
Os testes estatísticos não-paramétricos foram realizados através da utilização do software
STATISTICA®.
4.5.2. PARÂMETROS ESTATÍSTICOS
Para determinação das diferenças entre os dados estimados pela metodologia, ou seja,
“modelados”, e os dados coletados em campo nas diferentes áreas, foram utilizados os
seguintes parâmetros estatísticos:
Relative Mean Absolute Error ( )
Proposto por WALSTRA et al. (2001), este parâmetro estatístico (Equação 10) é útil para
comparação da posição da linha de costa corrigida, coma linha de costa medida em campo.
∑
∑
(Equação 10)
O ideal é nulo. WALSTRA et al. (2001), apresentam também uma tabela na qual
classificam (qualificam) os valores dos erros, estas qualificações, foram reproduzidas na
Tabela 1.
Tabela 1. Classificação do por intervalos segundo WALSTRA et al. (2001).
Erro Percentual ( ) (%) Classificação
< 20 Excelente
20 < > 40 Bom
40 < > 70 Razoável
70 < > 100 Ruim
> 100 Péssimo
48
Absolute Mean Error Statistic ( )
O erro estatístico absoluto médio (Equação 11) é definido como (EPA, 2000; WILLMOTT,
1982):
∑ (Equação 11)
É um indicador do desvio entre o previsto pelo modelo, ou seja, o dado corrigido, e os dados
coletados em campo. O erro estatístico absoluto tem a mesma dimensão física (unidade) do
dado.
Desvio Padrão ( )
Para além dos parâmetros estatísticos supracitados, também foi feito o cálculo do desvio
padrão do erro ( ), de acordo com a Equação 12, onde ̅ é a média do erro.
√
∑ ( ( ) ̅)
(Equação 12)
Com a intenção de verificar se há similaridade estatística entre as três áreas de estudo (A1, A2
e A3), assim como se existe diferença estatística entre os levantamentos durante maré de
sizígia e maré de quadratura, os dados foram submetidos a uma análise estatística não
paramétrica, frente à impossibilidade de normalização dos dados.

49
5. RESULTADOS
5.1. DADOS DE CAMPO
A Tabela 2 apresenta os horários e respectivos níveis de maré medidos durante cada
levantamento de linha de costa nas distintas áreas de estudo.
Gráficos contendo os dados de maré medidos para cada dia de levantamento, e a previsão de
maré para o dia segundo a DNH (Diretoria de Hidrografia e Navegação), são apresentados no
APÊNDICE D.
Tabela 2. Nível da maré durante a aquisição das linhas de costa.
RÉGUA DE MARÉ – LINHAS DE COSTA
Área Tipo Maré Data Hora Linha Nível Maré (m)
A1
Sizígia 09/12/2010 10:05 L1 0,243
13:21 L2 0,639
Quadratura 29/04/2011 09:58 L1 0,400
12:32 L2 0,660
A2
Sizígia 04/04/2011 14:11 L2 0,887
17:41 L1 0,197
Quadratura 29/04/2011 09:24 L1 0,300
12:14 L2 0,640
A3
Sizígia 04/04/2011 15:25 L2 0,932
18:24 L1 -0,200
Quadratura 29/04/2011 07:59 L1 0,000
13:35 L2 0,480
A medição das declividades foi sempre realizada durante a maré baixa, sendo assim possível,
coletar dados na faixa intermediária da zona de espraiamento. No campo onde foram
realizados perfis perpendiculares na zona de espraiamento, foi utilizada esta mesma
metodologia.
As coordenadas dos pontos de declividade coletados com clinômetro para os diferentes
levantamentos e os respectivos valores obtidos, assim como os valores de declividade
calculados pelo coeficiente angular, através da equação reduzida da reta (Equação 5) ajustada
para os perfis coletados ao longo das áreas de estudo, são apresentados entre a Tabela 10 e
Tabela 12 no APÊNDICE E, assim como os gráficos gerados com os pontos dos perfis e as

50
respectivas equações reduzidas das retas, que podem ser visualizados entre a Figura 33 e a
Figura 35.
5.2. APLICAÇÃO DA METODOLOGIA
A seguir, entre a Figura 18 e a Figura 23, são apresentadas cartas contendo: os dados de linha
de costa coletados nos levantamentos nas diferentes áreas de estudo (L1 e L2), e condições de
maré; os pontos médios gerados (PM’s), transectos (Tonshore e Toffshore) e pontos
corrigidos (NP’s) pela rotina CLC; PT’s interpolados para a reta dos transectos pela rotina
ILC; e Espacialização dos pontos corrigidos (NP’s) e pontos Interpolados (PT’s) para
comparação entre os dados modelados/corrigidos e dados coletados em campo.

51
Figura 18. Dados de linha de costa coletados com DGPS-RTK na A1 no dia 09/12/2010 e dados modelados/corrigidos com as rotinas CLC e ILC.

52
Figura 19. Dados de linha de costa coletados com DGPS-RTK na A1 no dia 29/04/2011 e dados modelados/corrigidos com as rotinas CLC e ILC.
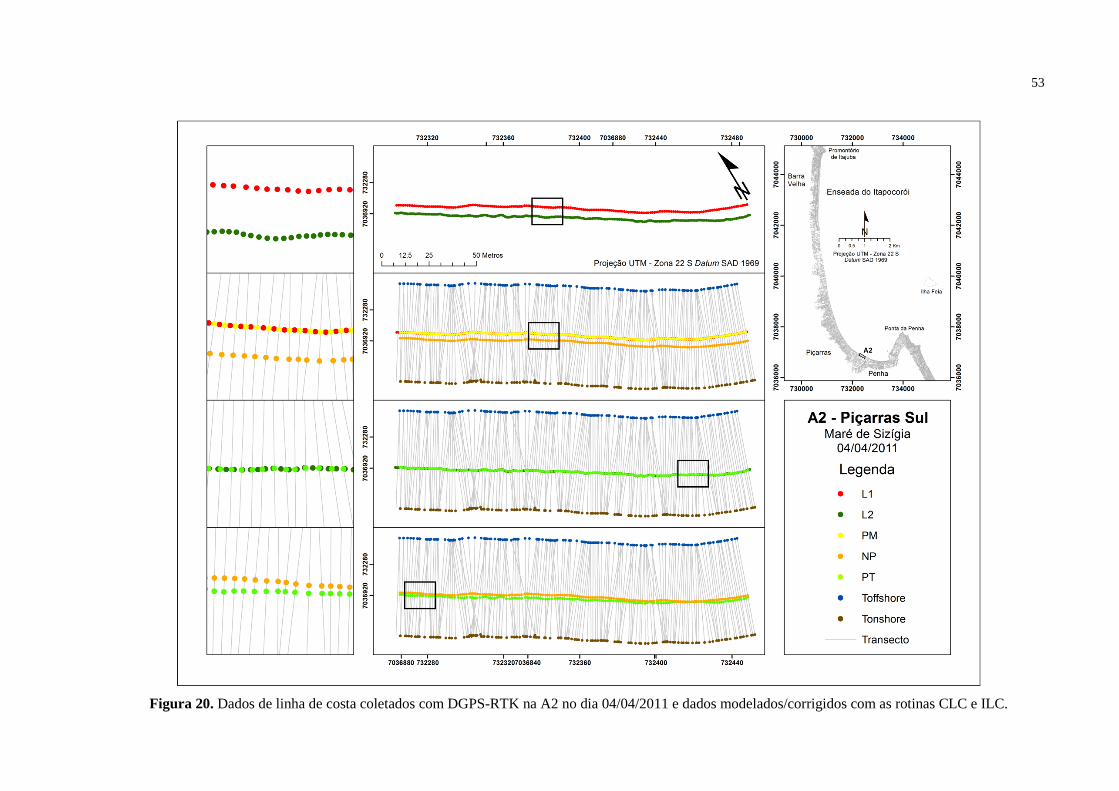
53
Figura 20. Dados de linha de costa coletados com DGPS-RTK na A2 no dia 04/04/2011 e dados modelados/corrigidos com as rotinas CLC e ILC.

54
Figura 21. Dados de linha de costa coletados com DGPS-RTK na A2 no dia 29/04/2011 e dados modelados/corrigidos com as rotinas CLC e ILC.

55
Figura 22. Dados de linha de costa coletados com DGPS-RTK na A3 no dia 04/04/2011 e dados modelados/corrigidos com as rotinas CLC e ILC.

56
Figura 23. Dados de linha de costa coletados com DGPS-RTK na A3 no dia 29/04/2011 e dados modelados/corrigidos com as rotinas CLC e ILC.

57
5.3. ANÁLISES ESTATÍSTICAS
Para realização das análises estatísticas não-paramétricas, foram utilizados os dados de erro
em módulo (abs) de cada ponto comparado, para as diferentes áreas e condições de maré (sizígia e
quadratura), obtidos pela rotina VLC.
Os resultados obtidos pelo teste de Kruskal-Wallis realizado para comparação entre as três
áreas de estudo, é apresentado na Tabela 3. Para realização do teste, foram comparados os
dados de erro (abs) calculados para cada uma das áreas (sizígia + quadratura). Onde a área foi
classificada como variável independente, e o erro (abs), como variável dependente.
Tabela 3. Teste de Kruskal-Wallis para comparação entre as diferentes áreas.
KRUSKAL-WALLIS - ANOVA by Ranks
Variável
Dependente:
Erro (abs)
Variável Independente: Área
Teste de Kruskal-Wallis: H (2, N = 981) = 159,362 p = 0,000
Código N Válido Soma dos Ranks
A1 107 309 126090,000
A2 108 388 165444,000
A3 109 284 190137,000
O teste de Kruskal-Wallis revelou que existe diferença entre as áreas analisadas (p < 0,050),
rejeitando H0, assim foi aplicado a posteriori o teste de Dunn. Os resultados obtidos são
apresentados na Tabela 4 abaixo.
Tabela 4. Teste de Dunn a posteriori.
DUNN
Teste de Dunn: Qcrítico = 2,394 α = 0,050
A1 A2 A3
A1 - 1,195 18,563
A2 1,195 - 16,035
A3 18,563 16,035 -
A fim de verificar se existe diferença significativa entre as correções realizadas em linhas de
costa coletadas durante maré de sizígia e maré de quadratura, foi realizado um teste U de
Mann-Whitney, comparando o conjunto de dados das três áreas de estudo coletados e

58
corrigidos com maré de sizígia, com o conjunto de dados de maré de quadratura. Como
variável dependente, foi utilizado o tipo de maré, e como variável independente, foi utilizado
o erro entre cada ponto analisado durante as diferentes condições de maré. O resultado é
apresentado na Tabela 5.
Tabela 5. Teste U de Mann-Whitney para comparação entre dados de maré de sizígia e de maré de
quadratura.
Teste U de MANN-WHITNEY
Variável
Dependente:
Erro (abs)
Variável Independente: Maré
Testes Marcados são Significantes com p < 0,050
Soma dos Ranks
Sizígia
Soma dos Ranks
Quadratura
N Válido
Sizígia
N Válido
Quadratura
256371,000 225300,000 419 562
U Z p Z Ajustado p
67097,000 11,536 0,000 11,536 0,000
Foi encontrada diferença significativa entre os dados de sizígia e dados de maré de quadratura
(p < 0,050).
A seguir, foi realizado um teste de Wilcoxon, para comparação pareada entre os pontos de
linha de costa corrigidos com a declividade coletada pelo clinômetro (Dc), e os pontos
corrigidos com a declividade calculada por meio dos perfis realizados na zona de
espraiamento (Dp). O teste tem apenas variáveis dependentes de entrada. O resultado obtido é
apresentado na Tabela 6.
Tabela 6. Teste de Wilcoxon para comparação entre as linhas corrigidas com as declividades
coletadas por clinômetro (Dc), e calculadas por meio de perfis na zona de espraiamento (Dp).
WILCOXON
Dc - Erro (abs)
&
Dp - Erro (abs)
Teste Pareado de Wilcoxon
Testes Marcados são Significantes com p < 0,050
N Válido T Z p
562 35223,000 11,351 0,000
O teste pareado de Wilcoxon mostrou que há diferença estatística significativa (p < 0,050)
entre os pontos de linha de costa corrigidos com as declividades provenientes do clinômetro

59
(Dc) e estes mesmos pontos corrigidos com os dados dos perfis realizados na zona de
espraiamento (Dp).
5.4. PARÂMETROS ESTATÍSTICOS
A estimativa da incerteza gerada pelo operador do GPS foi feita através da utilização das
rotinas CLC, ILC e VLC adaptadas para este propósito. Os dados de erro absoluto ( )
obtidos são apresentados na Tabela 7.
Tabela 7. Erro absoluto gerado pelo operador durante a aquisição das linhas de costa.
Incerteza – Operador
A1 (m) = 0,401m
A2 (m) = 0,497m
A3 (m) = 1,786m
Na Tabela 8 abaixo, são apresentados os valores obtidos pelos parâmetros estatísticos
calculados com os dados coletados e corrigidos para cada área de estudo nas diferentes
condições de maré. A correção foi feita com os dados de declividade coletados com
clinômetro, interpolados para todos os pontos das linhas de costa.
Tabela 8. Parâmetros estatísticos calculados para as diferentes áreas de estudo, em diferentes
condições de maré.
Linhas de Costa (Sizígia X Quadratura)
Parâmetros
Estatísticos
Sizígia Quadratura
A1 A2 A3 A1 A2 A3
(%) = 13,352 27,014 19,690 26,932 21,660 17,782
(m) = 0,552 1,530 2,466 0,862 0,395 1,212
(m) = 0,421 0,589 0,834 0,371 0,273 0,883
A seguir, são apresentados gráficos com as variações totais da posição da linha de costa
medida em campo e da linha corrigida, em relação a primeira linha coletada para cada área de
estudo. Também é apresentado o erro calculado entre cada par de pontos (medido e corrigido)
ao longo dos transectos, e a incerteza gerada pelo erro do operador.

60
Figura 24. Variação total e erro entre a linha corrigida pela rotina CLC e a medida em campo
(interpolada pela rotina ILC) na praia Alegre (A1) durante maré de sizígia.
Figura 25. Variação total e erro entre a linha corrigida pela rotina CLC e a medida em campo
(interpolada pela rotina ILC) na praia Alegre (A1) durante maré de quadratura.
0
2
4
6
8
0 20 40 60 80 100 120
Var
iaçã
o T
ota
l (m
)
Transectos
A1 - Sizígia (09/12/2010)
-2
-1
0
1
0 20 40 60 80 100 120
Erro
(m
)
Transectos
LC Medida LC Corrigida Incerteza
0
2
4
6
8
0 20 40 60 80 100 120 140 160
Var
iaçã
o T
ota
l (m
)
Transectos
A1 - Quadratura (29/04/2011)
-2
-1
0
1
0 20 40 60 80 100 120 140 160
Erro
(m
)
Transectos
LC Medida LC Corrigida Incerteza

61
Figura 26. Variação total e erro entre a linha corrigida pela rotina CLC e a medida em campo
(interpolada pela rotina ILC) na região sul da praia de Piçarras (A2) durante maré de sizígia.
Figura 27. Variação total e erro entre a linha corrigida pela rotina CLC e a medida em campo
(interpolada pela rotina ILC) na região sul da praia de Piçarras (A2) durante maré de quadratura.
0
2
4
6
8
0 20 40 60 80 100 120 140 160
Var
iaçã
o T
ota
l (m
)
Transectos
A2 - Sizígia (04/04/2011)
-4
-2
0
2
0 20 40 60 80 100 120 140 160
Erro
(m
)
Transectos
LC Medida LC Corrigida Incerteza
0
2
4
6
8
0 20 40 60 80 100 120 140 160 180 200 220
Var
iaçã
o T
ota
l (m
)
Transectos
A2 - Quadratura (29/04/2011)
-4
-2
0
2
0 20 40 60 80 100 120 140 160 180 200 220
Erro
(m
)
Transectos
LC Medida LC Corrigida Incerteza

62
Figura 28. Variação total e erro entre a linha corrigida pela rotina CLC e a medida em campo
(interpolada pela rotina ILC) na praia de Itajuba (A3) durante maré de sizígia.
Figura 29. Variação total e erro entre a linha corrigida pela rotina CLC e a medida em campo
(interpolada pela rotina ILC) na praia de Itajuba (A3) durante maré de quadratura.
0
5
10
15
0 20 40 60 80 100 120Var
iaçã
o T
ota
l (m
)
Transectos
A3 - Sizígia (04/04/2011)
-5
0
5
0 20 40 60 80 100 120Erro
(m
)
Transectos
LC Medida LC Corrigida Incerteza
0
5
10
15
0 20 40 60 80 100 120 140 160Var
iaçã
o T
ota
l (m
)
Transectos
A3 - Quadratura (29/04/2011)
-5
0
5
0 20 40 60 80 100 120 140 160Erro
(m
)
Transectos
LC Medida LC Corrigida Incerteza

63
O teste pareado de Wilcoxon mostrou a existência de diferença estatística significativa entre
os dados corrigidos com a declividade do clinômetro, e os dados corrigidos com a declividade
dos perfis na zona de espraiamento, assim, a fim de verificar qual o método de determinação
da declividade se mostrou mais eficiente para correção da posição da linha de costa, foram
calculados os parâmetros estatísticos relacionados a cada um dos métodos (Tabela 9).
Tabela 9. Parâmetros estatísticos das linhas de costa para as diferentes áreas, corrigidas com
diferentes metodologias de coleta de declividade.
Linhas de Costa (Clinômetro X Perfil)
Parâmetros
Estatísticos
Clinômetro Perfil
A1 A2 A3 A1 A2 A3
(%) = 26,932 21,660 17,782 31,622 23,297 21,470
(m) = 0,862 0,395 1,212 1,012 0,425 1,464
(m) = 0,371 0,273 0,883 0,408 0,309 0,940

64
6. DISCUSSÃO
As rotinas geradas no âmbito do presente trabalho são fundamentadas nos conceitos de
geometria analítica e trigonometria. Neste sentido, as correções são feitas com base em uma
praia ideal com declividade constante ao longo do perfil da zona de espraiamento, e clima de
ondas constante ao longo do levantamento, não contemplando eventuais variações que
ocorrem no ambiente praial. Assim, quanto mais próximo a praia estudada estiver de uma
praia ideal, maior será a capacidade da rotina CLC em reproduzir o deslocamento da linha de
costa em função das mudanças no nível da maré.
O teste de Kruskal-Wallis rejeitou H0 em favor de H1, pois revelou que existe diferença
estatística significativa entre as três áreas de estudo, com base nestes resultados, o teste de
DUNN aplicado a posteriori para comparações múltiplas entre as áreas, com QCrítico de 2,394,
e intervalo de confiança de 95% (α = 0,050), apresentou valores de Q = 1,195 para a
comparação entre A1 e A2, evidenciando que as linhas de costa corrigidas, tanto da praia
Alegre, quanto da porção sul da praia de Piçarras, podem ser analisadas em conjunto, por
satisfazerem H0. Estas áreas respondem de modo estatisticamente similar à metodologia de
correção da posição da linha de costa. Quanto a porção norte da praia de Itajuba (A3), foi
constatado que esta responde a metodologia de modo diferenciado em comparação com as
outras áreas, por rejeitar H0.
De acordo com KLEIN & MENEZES (2001); ARAUJO (2008); CAMARGO (2009), a morfologia
das praias da enseada em direção ao norte, apresenta uma alta variabilidade devido à maior
exposição ao regime energético incidente, e por consequência alta mobilidade do perfil praial.
Neste contexto, o trecho norte, caracterizado como intermediário, apresenta um runup maior,
além de apresentar alta variação de declividade ao longo do percurso analisado devido a
presença de cúspides, o que acaba por gerar um padrão “ondulado” na linha de costa,
principalmente durante a maré alta, estes fatores associados, acabam por gerar um erro
adicional, tanto na identificação do indicador da linha de costa em campo, quanto na correção
da linha através da metodologia desenvolvida, principalmente no que diz respeito a
declividade, pois como esta foi medida em intervalos de 15 metros, pode não ter contemplado
as variações de declividades nas cúspides praiais em sua totalidade. Já as áreas 1 e 2,
apresentam estagio morfodinâmico bem definido (dissipativo e reflectivo, respectivamente),
com menor variabilidade/ mobilidade do perfil praial, resultando declividades mais constantes
65
ao longo do perfil, e em linhas de costa mais retilíneas, facilitando a identificação do
indicador de linha de costa escolhido.
Quanto ao erro do operador, é importante ter em conta que os valores calculados, representam
apenas uma estimativa de erro, diretamente relacionada com o operador do GPS e sua
capacidade em seguir e identificar o indicador de linha de costa, assim, estes valores
necessitam ser analisados sempre atrelados a este contexto. A incerteza calculada ( ) para
a linha de costa da A3, com 1,786 metros, é muito superior as encontradas nas áreas 1 e 2 (A1
e A2), que apresentaram valores de incerteza inferiores a 0,5 metros. Esta discrepância entre
os valores pode ser explicada pelo padrão da linha de costa já descrito acima.
Com relação aos parâmetros estatísticos calculados para as linhas corrigidas pela rotina CLC,
o variou entre excelente (< 20%) e bom (> 20 e < 40%), de acordo com os critérios
propostos pelos autores WALSTRA et al. (2001). Para A3, o valor ficou abaixo de 20% tanto
nos dados de sizígia, quanto nos dados de quadratura. Nas demais áreas, apenas o
levantamento de sizígia da A1 apresentou valor de inferior a 20% (13,4%), já os
demais, variaram entre 20 e 40%, sendo classificados como bons.
O , é um parâmetro geralmente utilizado para comparação entre séries temporais
medidas e modeladas, para avaliar a capacidade do modelo (no caso a rotina) em reproduzir
os dados coletados in situ. O , relaciona diretamente o erro entre o dado modelado e o
medido (erro (abs)), com a variação total do dado medido, ou seja, quanto menor for a
grandeza do erro (abs), em relação a grandeza da variação total, menor será o valor do .
Isso explica porque os menores valores foram obtidos na A3, pois como é possível observar
entre a Figura 24 e a Figura 29, a variação total nas linhas de costa da A3, foram superiores as
variações totais nas outras duas áreas.
O teste U de Mann-Whitney, com intervalo de confiança de 95% (p < 0,050), mostrou que
existem diferenças significativas entre os dados coletados em períodos de maré de sizígia, e
período de maré de quadratura, assim, os parâmetros estatísticos calculados, serão analisados
separadamente.
Quanto ao erro absoluto de cada correção ( ), para as áreas A2 e A3 nos levantamentos
com maré de quadratura, o erro absoluto ficou abaixo dos valores de calculados para
estimar a incerteza do operador, assim, pode-se afirmar que para estas duas correções, a
metodologia foi satisfatória, conseguindo reproduzir o observado em campo. Já para os
levantamentos em condição de maré de sizígia nestas mesmas áreas, os valores de

66
encontrados, foram superiores as incertezas calculadas para as linhas, fato que pode ser
explicado pela condição do tempo no dia do levantamento. Como choveu muito, a
identificação do indicador da linha de costa foi prejudicada, gerando um erro adicional. Com
relação aos valores de calculados para a A1, embora estejam acima da incerteza
estimada, não diferem muito desta em ordem de grandeza, assim, pode-se considerar que a
metodologia, foi satisfatória para correção das linhas de costa desta área.
Os valores de desvio padrão ( ) calculados para os dados de maré de quadratura, estão
adequados aos valores de incerteza estimados, e analisando estes, juntamente com os gráficos
de variação total em metros das linhas medidas em campo, e linhas corrigidas pela rotina
CLC, apresentados entre a Figura 24 e a Figura 29, é possível observar que a rotina tente a
suavizar a variação da linha de costa corrigida ao longo dos transectos, provavelmente devido
aos valores pontuais de declividade coletados.
Nos testes realizados para comparação entre o melhor método de determinação de declividade
do perfil da praia, o teste pareado de Wilcoxon (Tabela 6) mostrou que existe diferença
significativa entre os métodos do clinômetro, e do perfil na zona de espraiamento. Essa
discrepância é evidenciada nos parâmetros estatísticos calculados (Tabela 9), onde a linha
corrigida com os dados do clinômetro, comparada a esta mesma linha corrigida com os dados
dos perfis, apresentou redução de erros em todos os parâmetros, para as três áreas analisadas.
SHORT & HESP (1982) apud STIVE et al. (2002), sugerem que a mobilidade da praia, e por
consequência a variação da linha de costa, ocorre em função do estado morfodinâmico da
praia. Praias dissipativas, intermediárias e reflectivas, correspondem a praias com mobilidade
variando entre baixa e moderada, moderada e alta, e baixa respectivamente.
STIVE et al. (2002) cita que em praias australianas, a média de variação da linha de costa gira
em torno de 5 a 14 metros, em um intervalo de 1 a 5 anos. Considerando a escala de tempo de
curta escala proposta pelos autores acima, que varia de horas a anos, com a repectiva escala
espacial variando entre 10 metros a 1 quilometro, os resultados obtidos pela rotina de correção
proposta (CLC) são satisfatórios.

67
7. CONSIDERAÇÕES FINAIS
A rotina de correção desenvolvida em ambiente MATLAB®, apresentou resultados
satisfatórios em sua capacidade de reproduzir a posição da linha de costa em função de
variações no nível da maré.
O trabalho foi realizado com base no indicador de linha de costa utilizado (limite de runup
instantâneo), no entanto, a metodologia serve para correção de linhas de costa coletadas por
meio de quaisquer indicadores que sofram variação de posição em função do tempo e do nível
de água (e.g. interface areia seca/molhada; linha de detritos; linha de preamar; linha de água
instantânea; linha de baixamar), desde que se conheça o nível de água em que a linha foi
coletada, e a declividade da praia, além das coordenadas x, y, z dos pontos.
O erro na posição da linha de costa induzido pelo operador do GPS, é acentuado, mesmo com
a redução de erros de posicionamento do método DGPS-RTK.
De acordo com o teste estatístico não-paramétrico de Kruskal-Wallis, a metodologia funciona
de modo similar em praias dissipativas e reflectivas. Já em praias intermediárias, o erro é mais
acentuado devido a maior variabilidade morfológica do perfil praial.
O teste de U de Mann-Whitney apontou uma diferença significativa entre as linhas coletadas
com maré de sizígia, e as linhas coletadas com maré de quadratura. Durante a campanha de
campo do dia 04/04/2011, choveu forte no intervalo entre a coleta das linhas de costa na A2 e
A3. A chuva atrapalhou a identificação do indicador em campo, podendo ter induzido erros
adicionais na linha coletada. Serão necessários mais dados de campo, a fim de comprovar se
existe ou não diferença significativa entre as condições de maré.
Para além dos fatores citados acima, é importante ter em conta que, embora a maré para
correção das linhas de costa tenha sido medida em campo com régua de maré, como esta foi
instalada na desembocadura do rio Piçarras pode ter ocorrido erro na leitura em função da
descarga fluvial e correntes associadas a variação da maré no rio. Esse erro pode ser
acentuado principalmente durante períodos de maré de sizígia e/ou períodos chuvosos.
O método foi desenvolvido a fim de sanar problemas inerentes às analises de variação de
linha de costa de curta escala, uma vez que para estas análises, é necessária a escolha de um
indicador que sofra variações em curta escala, porém para que este possa ser utilizado, precisa
estar corretamente referenciado no tempo e no espaço. Assim, a utilização da metodologia

68
proposta, esta intimamente relacionada ao ambiente que se pretende estudar, e as escalas em
que as variações ocorrem neste ambiente, sendo indicado realizar uma análise de erros (como
a efetuada no presente trabalho) a fim de se determinar se os erros são ou não aceitáveis para
o local que se pretende estudar.
Para a região de estudo em questão, o método se mostrou eficiente em corrigir linhas de costa
para comparações em escala de anos, pois como a linha de costa da região (Piçarras e Itajuba),
varia em média 2,8 metros por ano (ARAUJO, 2008; ARAUJO et al., 2009) o erro encontrado é
pequeno para mascarar variações na linha de costa nesta escala de tempo.

69
8. REFERÊNCIAS BIBLIOGRÁFICAS
ADDO, K. A.; WALKDEN, M. & MILLS, J. P. Detection, Measurement and Prediction of
Shoreline Recession in Accra, Ghana. Journal of Photogrammetry & Remote Sensing, v.
63, p. 543-558, 2008.
ARAUJO, C. E. S.; FRANCO, D.; MELO, E. & PIMENTA, F. Wave Regime Characteristics of the
Southern Brazilian Coast. In: Proceedings of the XVI 90 International Conference on
Coastal and Port Engineering in Developing Countries (COPEDEC VI). Colombo, Sri
Lanka, n. 97; p. 235-350, 2003.
ARAUJO, R. S. Morfologia do Perfil Praial, Sedimentologia e Evolução Histórica da Linha de
Costa das Praias da Enseada do Itapocorói – Santa Catarina. 2008, 145p. Dissertação
(Mestrado). Universidade do Vale do Itajaí, Centro de Ciências Tecnológicas da Terra e do
Mar, Curso de pós-graduação em Ciência e Tecnologia Ambiental. Itajaí, Brasil, 2008.
ARAUJO, R. S.; SILVA, G. V.; FREITAS, D. & KLEIN, A. H. F. Georreferenciamento de
Fotografias Aéreas e Análise da Variação da Linha de Costa. p. 123-138, 2009. In: J.
ALCÁNTARA CARRIÓ; I.D. CORREA ARANGO; F.I. ISLA MENDY; M. ALVARADO ORTEGA;
A.H.F. KLEIN; A. CABRERA HERNÁNDEZ & R. SANDOVAL BARLOW (Eds). Métodos en
Teledetección Aplicada a la Prevención de Riesgos Naturales en el Litoral. Servicio de
Publicaciones del Programa Iberoamericano de Ciencia y Tecnología para el Desarrollo.
297p., 2009.
BAPTISTA, P.; BASTOS, L.; GRANJA, H. M.; GAMA, C. & BERNARDES, C. Methodological
Approaches to Shoreline Assessment: Short-Term Analysis of Beach Erosion Rates. In:
Abstract submitted to XIX International Symposium on GIS and Computer Cartography
for Coastal Zone Management (CoastGIS). Santander, Spain, 2007.
BIANCONI, A.; GOVONE, J. G.; VON ZUBEN, C. J.; PIÃO, A. C. S.; PIZANO, M. A. & ALBERTI, L.
F. Transformação de Dado e Implicações da Utilização do Teste de Kruskal-Wallis em
Pesquisas Agroecológicas. Revista de Ecotoxicologia e Meio Ambiente, v. 18, p. 27-34,
2008.
BOAK, E. H. & TURNER, I. L. Shoreline Definition and Detection: A Review. Journal of
Coastal Research, v. 21, n. 4, p. 688-703, 2005.
CALLIARI, L. J.; MUEHE, D.; HOEFEL, F. & TOLDO, E. Morfodinâmica Praial: Uma Breve
Revisão. Revista Brasileira de Oceanografia, v.50, n. 1, 2002.

70
CAMARGO, J. M. Descrição Geomorfológica e Análise da Estabilidade Quanto a Posição das
Desembocaduras do Rio Piçarras e Rio Iriri na Enseada do Itapocorói – SC. 2009, 72p.
Trabalho de Conclusão de Curso (Graduação). Universidade do Vale do Itajaí, Centro de
Ciências Tecnológicas da Terra e do Mar, Curso de Oceanografia. Itajaí, Brasil, 2009.
CROWELL, M. Historical shoreline mapping and analysis: An historical overview. In: Abstract
submitted to Shoreline Change Conference II: A Workshop on Managing Shoreline
Change. Charleston, United States of America, 2006.
DALBELO, L. F. A. DGPS em Rede: Desenvolvimento e Implantação Via Internet Utilizando a
Rede GNSS do Estado de São Paulo. 2010, 102p. Trabalho de Conclusão de Curso
(Graduação). Universidade Estadual Paulista, Faculdade de Ciências e Tecnologia, Curso
de Engenharia Cartográfica. Presidente Prudente, Brasil, 2010.
EPA (ENVIRONMENTAL PROTECTION AGENCY). Hydrodynamic and Water Quality Model of
Christina River Basin. Region III, Final Report. Philadelphia, United States of America,
2000.
HOEFEL, F. G. Diagnóstico da Erosão Costeira na Praia de Piçarras, Santa Catarina. 1998,
86p. Dissertação (Mestrado). Universidade Federal do Rio de Janeiro, Programa de Pós-
graduação de Engenharia. Rio de Janeiro, Brasil, 1998.
KLEIN, A. H. F. Morphodynamics of Headland Bay Beaches: Examples form the Coast of
Santa Catarina State, Brazil. 2004, 257p. Tese (Doutorado). Universidade do Algarve.
Faro, Portugal, 2004.
KLEIN, A. H. F. & MENEZES, J. T. Beach Morphodynamics and Profile Sequence for a
Headland Bay Coast. Journal of Coastal Research, v. 17, n. 4, p. 812-835, 2001.
LEATHERMAN, S. P. Shoreline Change Mapping and Management Along the U.S. East Coast.
Journal of Coastal Research, Special Issue, n. 38, p. 5-13, 2003.
MOORE, L. J. Shoreline Mapping Techniques. Journal of Coastal Research, v. 16, n. 1, p.
111-124, 2000.
PAJAK, M. J. & LEATHERMAN, S. P. The High Water Line as Shoreline Indicator. Journal of
Coastal Research, v. 18, n.2, p. 329-337, 2002.

71
PARKER, B. The Difficulties in Measuring a Consistently Defined Shoreline: The Problem of
Vertical Referencing. In: Abstract submitted to Shoreline Change Conference II: A
Workshop on Managing Shoreline Change. Charleston, United States of America, 2006.
PONTES, A. C. F. & CORRENTE, J. E. Comparações Múltiplas Não-paramétricas para o
Delineamento de um Fator de Correção Simples. Revista de Matemática e Estatística, v.
19, p. 179-197, 2001.
ROCHA, C. P.; ARAÚJO, T. C. M. & MENDONÇA, F. J. B. Aplicação de Metodologia Alternativa
para Localizar e Monitorar Linhas de Costa Usando Técnicas de Posicionamento pelo
GNSS: Um Estudo de Caso na Praia de Sauaçui, Nordeste do Brasil. Revista de Gestão
Costeira Integrada, v. 9, n. 1, p. 93-108, 2009a.
ROCHA, C. P.; ARAÚJO, T. C. M. & MENDONÇA, F. J. B. Methodology for Location of
Shorelines using 3D-GPS Positioning: A Case Study at Saguaçui Beach, Northeast Brazil.
Journal of Coastal Research, v. 25, n. 4, p. 1052-1058, 2009b.
RUGGIERO, P.; KOMAR, P. D.; MC DOUGAL, W. G.; MARRA, J. J. & BEACH, R. A. Wave Runup,
Extreme Water Levels and the Erosion of Properties Backing Beaches. Journal of Coastal
Research, v. 17, n. 2, p. 407-419, 2001.
RUGGIERO, P. & LIST, J. H. Improving Accuracy and Statistical Reliability of Shoreline
Position and Change Rate Estimates. Journal of Coastal Research, v. 25, n. 5, p. 1069-
1081, 2009.
SCHETTINI, C. A. F.; CARVALHO, J. L. B. & JABOR, P. Comparative Hydrology and Suspended
Matter Distribution of Four Estuaries in Santa Catarina State – Southern Brazil. In:
Proceedings of the Workshop on Comparative Studies of Temperate Coast Estuaries. Bahia
Blanca, p. 29-32, 1996.
SEEBER, G. Satellite Geodesy: Foundations, Methods, and Applications. Berlin, New York:
Walter de Gruyter, 2003.
SHORT, A. D. Australian Beach Systems - Nature and Distribution. Journal of Coastal
Research, v.22, n. 1, p. 11-27, 2006.
SILVA, O. & CÂMARA, F. G. Estatística Não Paramétrica: Testes de Hipóteses e Medidas de
Associação. 2001, 121p. Universidade dos Açores, Departamento de Matemática. Ponta
Delgada, Portugal, 2001.

72
SILVEIRA, L. F. Análise da Morfodinâmica e da Estabilidade da Forma em Planta das Praias
de Enseada do Estado de Santa Catarina e do Litoral Norte de São Paulo Utilizando
Imagens Aéreas. 2008, 114p. Trabalho de Conclusão de Curso (Graduação). Universidade
do Vale do Itajaí, Centro de Ciências Tecnológicas da Terra e do Mar, Curso de
Oceanografia. Itajaí, Brasil, 2008.
SPROVIERI, F. C. Evolução Sedimentar e Morfológica dos Perfis Praiais das Praias Alegre e
Piçarras – SC, Após Obras de Recomposição da Linha de Costa. 2008, 113p. Trabalho de
Conclusão de Curso (Graduação). Universidade do Vale do Itajaí, Centro de Ciências
Tecnológicas da Terra e do Mar, Curso de Oceanografia. Itajaí, Brasil, 2008.
STIVE, M. J. F.; AARNINKHOF, S. G. J.; HAMM, L.; HANSON, H.; LARSON, M.; WIJNBERG, K.
M.; NICHOLLS, R. J.; CAPOBIANCO, M. Variability of Shore and Shoreline Evolution.
Coastal Engineering, v. 47, p. 211-235, 2002.
STOCKDON, H. F.; SALLENGER, A. H.; LIST, J. H. & HOLMAN, R. A. Estimation of Shoreline
Position and Change using Airborne Topographic Lidar Data. Journal of Coastal
Research, v. 18, n. 3, p. 502-513, 2002.
SUGUIO, K. & MARTIN, L. Variation of Coastal Dynamics During the Last 7000 Years
Recorded in Beach-Ridge Plains Associated with River Mouths: Example from the Central
Brazilian Coast. Palaeogeography, Palaeoclimatology, Palaeoecology. v. 99, p. 119-140,
1992.
TRIMBLE. GPS Tutorial. Trimble Navegation Limited (2010). Disponível em:
<http://www.trimble.com/gps/dgps.shtml> Acesso em: 18 de junho de 2010.
TRUCCOLO, E. C.; GERHARDINGER, L. C.; FERREIRA, J. N. P. & OLIVEIRA, F. M. Efeito da
Meteorologia no Nível do Estuário do Rio Itajaí-açu, SC. In: Anais da XIII Semana
Nacional de Oceanografia, Itajaí, Santa Catarina, Brasil, p.464-466, 2000.
TRUCCOLO, E. C. & SCHETTINI, C. A. F. Marés Astronômicas na Baía da Babitonga, SC.
Notas Técnicas da Facimar, v. 3, p. 57-66, 1999.
VARELLA, C. A. A. & SENA JUNIOR, D. G. Estudo do Interpolador IDW para Utilização em
Agricultura de Precisão. 2010, 26p. Trabalho (Pós Graduação). Universidade Federal
Rural do Rio de Janeiro, Departamento de Solos. Rio de Janeiro, Brasil, 2010.
WALSTRA. L. C.;VAN RIJN, L. C.; BLOGG, H. & VAN ORMONDT, M. Evaluation of a
Hydrodynamic Area Model Based on the COAST3D Data at Teignmouth 1999. Report
TR121 - EC MAST Project. Wallingford, United Kingdom, 2001.

73
WILLMOTT C. J. Some Comments on the Evaluation of Model Performance. American
Meteorological Society Bulletin, p.1309-1313, 1982.
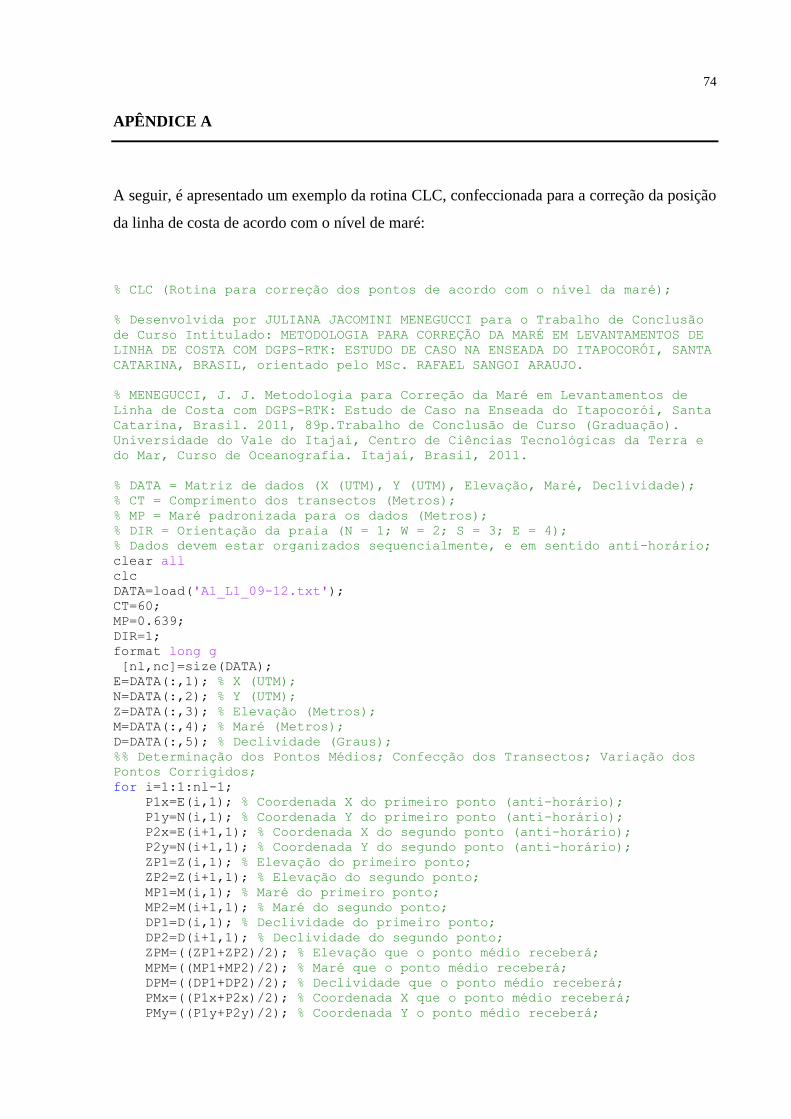
74
APÊNDICE A
A seguir, é apresentado um exemplo da rotina CLC, confeccionada para a correção da posição
da linha de costa de acordo com o nível de maré:
% CLC (Rotina para correção dos pontos de acordo com o nível da maré);
% Desenvolvida por JULIANA JACOMINI MENEGUCCI para o Trabalho de Conclusão
de Curso Intitulado: METODOLOGIA PARA CORREÇÃO DA MARÉ EM LEVANTAMENTOS DE
LINHA DE COSTA COM DGPS-RTK: ESTUDO DE CASO NA ENSEADA DO ITAPOCORÓI, SANTA
CATARINA, BRASIL, orientado pelo MSc. RAFAEL SANGOI ARAUJO.
% MENEGUCCI, J. J. Metodologia para Correção da Maré em Levantamentos de
Linha de Costa com DGPS-RTK: Estudo de Caso na Enseada do Itapocorói, Santa
Catarina, Brasil. 2011, 89p.Trabalho de Conclusão de Curso (Graduação).
Universidade do Vale do Itajaí, Centro de Ciências Tecnológicas da Terra e
do Mar, Curso de Oceanografia. Itajaí, Brasil, 2011.
% DATA = Matriz de dados (X (UTM), Y (UTM), Elevação, Maré, Declividade); % CT = Comprimento dos transectos (Metros); % MP = Maré padronizada para os dados (Metros); % DIR = Orientação da praia (N = 1; W = 2; S = 3; E = 4); % Dados devem estar organizados sequencialmente, e em sentido anti-horário; clear all clc DATA=load('A1_L1_09-12.txt'); CT=60; MP=0.639; DIR=1; format long g [nl,nc]=size(DATA); E=DATA(:,1); % X (UTM); N=DATA(:,2); % Y (UTM); Z=DATA(:,3); % Elevação (Metros); M=DATA(:,4); % Maré (Metros); D=DATA(:,5); % Declividade (Graus); %% Determinação dos Pontos Médios; Confecção dos Transectos; Variação dos
Pontos Corrigidos; for i=1:1:nl-1; P1x=E(i,1); % Coordenada X do primeiro ponto (anti-horário); P1y=N(i,1); % Coordenada Y do primeiro ponto (anti-horário); P2x=E(i+1,1); % Coordenada X do segundo ponto (anti-horário); P2y=N(i+1,1); % Coordenada Y do segundo ponto (anti-horário); ZP1=Z(i,1); % Elevação do primeiro ponto; ZP2=Z(i+1,1); % Elevação do segundo ponto; MP1=M(i,1); % Maré do primeiro ponto; MP2=M(i+1,1); % Maré do segundo ponto; DP1=D(i,1); % Declividade do primeiro ponto; DP2=D(i+1,1); % Declividade do segundo ponto; ZPM=((ZP1+ZP2)/2); % Elevação que o ponto médio receberá; MPM=((MP1+MP2)/2); % Maré que o ponto médio receberá; DPM=((DP1+DP2)/2); % Declividade que o ponto médio receberá; PMx=((P1x+P2x)/2); % Coordenada X que o ponto médio receberá; PMy=((P1y+P2y)/2); % Coordenada Y o ponto médio receberá;

75
if P1x==P2x; % Caso as coordenadas X do primeiro e segundo ponto sejam
iguais; TSy=PMy; TSx=PMx+(CT/2); TIy=PMy; TIx=PMx-(CT/2); end if P1y==P2y; % Caso as coordenadas Y do primeiro e segundo ponto sejam
iguais; TSy=PMy-(CT/2); TSx=PMx; TIy=PMy+(CT/2); TIx=PMx; end if P1x~=P2x && P1y~=P2y; % Caso as coordenadas X e Y do primeiro e
segundo ponto sejam diferentes; a=((P2y-P1y)/(P2x-P1x)); % Coeficiente angular da reta formada
entre os pontos P1 e P2; b=P1y-a*P1x; % Coeficiente linear da reta formada entre os pontos
P1 e P2; % Equação da reta perpendicular a formada entre os pontos P1 e P2,
e que contém o ponto PM; m=-1/a; % Coeficiente angular da reta perpendicular; k=PMy-m*PMx; % Coeficiente linear da reta perpendicular; beta=atan(m); % Ângulo da reta perpendicular em radianos; HIP=CT/2; % Distância entre PM e ponto extremo do transecto; CA=HIP*cos(beta); % Variação em X para chegar ao ponto extremo do
transecto; CO=HIP*sin(beta); % Variação em Y para chegar ao ponto extremo do
transecto; betaG=beta/(pi/180); % Ângulo da reta perpendicular em graus; if betaG<90; TSx=PMx+CA; % Variação em X para o ponto superior do transecto; TSy=PMy+CO; % Variação em Y para o ponto superior do transecto; TIx=PMx-CA; % Variação em X para o ponto inferior do transecto; TIy=PMy-CO; % Variação em Y para o ponto inferior do transecto; end if betaG>90; TSx=PMx-CA; % Variação em X para o ponto superior do transecto; TSy=PMy-CO; % Variação em Y para o ponto superior do transecto; TIx=PMx+CA; % Variação em X para o ponto inferior do transecto; TIy=PMy+CO; % Variação em Y para o ponto inferior do transecto; end end if DIR==1; % Praia orientada para norte (terceiro e quarto quadrante); if TSy>=TIy; TXoffshore=TSx; TYoffshore=TSy; TXonshore=TIx; TYonshore=TIy; else TXoffshore=TIx; TYoffshore=TIy; TXonshore=TSx; TYonshore=TSy; end end if DIR==2; % Praia orientada para oeste (primeiro e quarto quadrante); if TSx<=TIx; TXoffshore=TSx; TYoffshore=TSy;

76
TXonshore=TIx; TYonshore=TIy; else TXoffshore=TIx; TYoffshore=TIy; TXonshore=TSx; TYonshore=TSy; end end if DIR==3; % Praia orientada para sul (primeiro e segundo quadrante); if TSy>=TIy; TXoffshore=TIx; TYoffshore=TIy; TXonshore=TSx; TYonshore=TSy; else TXoffshore=TSx; TYoffshore=TSy; TXonshore=TIx; TYonshore=TIy; end end if DIR==4; % Praia orientada para leste (segundo e terceiro quadrante); if TSx<=TIx; TXoffshore=TIx; TYoffshore=TIy; TXonshore=TSx; TYonshore=TSy; else TXoffshore=TSx; TYoffshore=TSy; TXonshore=TIx; TYonshore=TIy; end end DRad=DPM*(pi/180); % Transformação do ângulo para radianos; ZP=(ZPM-MPM)+MP; % Nova elevação que o ponto terá com a maré padrão; Dist=(abs(ZP-ZPM))/tan(DRad); % Distancia a ser percorrida no
transecto, pelo novo ponto; if MPM==MP; % Se a maré não alterar, os pontos não se alteram; NPx=PMx; NPy=PMy; end if MPM~=MP; % Caso a maré seja diferente...; if PMx==TXoffshore; if MPM<MP && TYoffshore>PMy; NPy=PMy-Dist; NPx=PMx; end if MPM<MP && TYoffshore<PMy; NPy=PMy+Dist; NPx=PMx; end if MPM>MP && TYoffshore>PMy; NPy=PMy+Dist; NPx=PMx; end if MPM>MP && TYoffshore<PMy; NPy=PMy-Dist; NPx=PMx; end

77
end if PMy==TYoffshore; if MPM<MP && TXoffshore>PMx; NPy=PMy; NPx=PMx-Dist; end if MPM<MP && TXoffshore<PMx; NPy=PMy; NPx=PMx+Dist; end if MPM>MP && TXoffshore>PMx; NPy=PMy; NPx=PMx+Dist; end if MPM>MP && TXoffshore<PMx; NPy=PMy; NPx=PMx-Dist; end end if PMx~=TXoffshore && PMy~=TYoffshore; Vx=Dist*cos(beta); % Variação em X para o novo ponto corrigido; Vy=Dist*sin(beta); % Variação em Y para o novo ponto corrigido; if MPM<MP; % Caso o nível de maré a ser corrigido seja superior
ao nível em que os pontos foram coletados; NPx=PMx-Vx; NPy=PMy-Vy; DpTOFF=sqrt((NPx-TXoffshore)^2+(NPy-TYoffshore)^2); %
Distância entre o ponto corrigido e o transecto offshore; DpTON=sqrt((NPx-TXonshore)^2+(NPy-TYonshore)^2); %
Distância entre o ponto corrigido e o transecto onshore; if DpTOFF<DpTON; % Condição para impedir que o ponto migre
na direção inversa; NPx=PMx+Vx; NPy=PMy+Vy; end end if MPM>MP; % Caso o nível de maré a ser corrigido seja inferior
ao nível em que os pontos foram coletados; NPx=PMx+Vx; NPy=PMy+Vy; DpTOFF=sqrt((NPx-TXoffshore)^2+(NPy-TYoffshore)^2); %
Distância entre o ponto corrigido e o transecto offshore; DpTON=sqrt((NPx-TXonshore)^2+(NPy-TYonshore)^2); %
Distância entre o ponto corrigido e o transecto onshore; if DpTOFF>DpTON; % Condição para impedir que o ponto migre
na direção inversa; NPx=PMx-Vx; NPy=PMy-Vy; end end end end % Armazena XY dos transectos gerados; TRANSECTS(i,1)=TXoffshore; TRANSECTS(i,2)=TYoffshore; TRANSECTS(i,3)=TXonshore; TRANSECTS(i,4)=TYonshore; % Armazena XY dos pontos médios gerados; MIDPOINTS(i,1)=PMx; MIDPOINTS(i,2)=PMy; MIDPOINTS(i,3)=ZPM;

78
MIDPOINTS(i,4)=MPM; MIDPOINTS(i,5)=DPM; % Armazena XY dos novos pontos corrigidos; NEWPOINTS(i,1)=NPx; NEWPOINTS(i,2)=NPy; NEWPOINTS(i,3)=ZP; end %% Criação dos arquivos de saída xlswrite ('A1_L1_09-12_TR.xls', TRANSECTS); xlswrite ('A1_L1_09-12_PM.xls', MIDPOINTS); xlswrite ('A1_L1_09-12_NP.xls', NEWPOINTS);

79
APÊNDICE B
A seguir, é apresentado um exemplo da rotina ILC, desenvolvida para interpolação dos dados
coletados em campo no levantamento de validação, para pontos pertencentes aos transectos:
% ILC (Rotina para interpolação dos pontos medidos em campo para pontos
pertencentes aos transectos gerados na rotina anterior para posterior
comparação).
% Desenvolvida por JULIANA JACOMINI MENEGUCCI para o Trabalho de Conclusão
de Curso Intitulado: METODOLOGIA PARA CORREÇÃO DA MARÉ EM LEVANTAMENTOS DE
LINHA DE COSTA COM DGPS-RTK: ESTUDO DE CASO NA ENSEADA DO ITAPOCORÓI, SANTA
CATARINA, BRASIL, orientado pelo MSc. RAFAEL SANGOI ARAUJO.
% MENEGUCCI, J. J. Metodologia para Correção da Maré em Levantamentos de
Linha de Costa com DGPS-RTK: Estudo de Caso na Enseada do Itapocorói, Santa
Catarina, Brasil. 2011, 89p.Trabalho de Conclusão de Curso (Graduação).
Universidade do Vale do Itajaí, Centro de Ciências Tecnológicas da Terra e
do Mar, Curso de Oceanografia. Itajaí, Brasil, 2011.
% TRANSECTS = Matriz com transectos gerados pela rotina de correção;
% POINTS = Matriz com pontos medidos em campo (X (UTM), Y (UTM), Z
(Metros); clear all clc
TRANSECTS=xlsread('A1_L1_09-12_TR.xls'); POINTS=load('A1_L2_09-12.txt'); format long g [Tnl,Tnc]=size(TRANSECTS); [Pnl,Pnc]=size(POINTS); %% Interpolação dos Pontos Medidos para cada um dos Transectos; for i=1:1:Tnl; TXoffshore=TRANSECTS(i,1); TYoffshore=TRANSECTS(i,2); TXonshore=TRANSECTS(i,3); TYonshore=TRANSECTS(i,4); for j=1:1:Pnl; P1x=POINTS(j,1); P1y=POINTS(j,2); % Discretização da equação da reta; a=(TYoffshore)-(TYonshore); b=(TXonshore)-(TXoffshore); c=(TXoffshore*TYonshore)-(TYoffshore*TXonshore); VHIP=sqrt(((TXoffshore-P1x)^2)+((TYoffshore-P1y)^2)); % Hipotenusa
entre cada ponto e o ponto extremo offshore do transecto; VCO=(abs(a*P1x+b*P1y+c))/sqrt(a*a+b*b); % Variação em Y entre cada
ponto e o ponto extremo offshore do transecto; VCA=sqrt(VHIP^2-VCO^2); % Variação em X entre cada ponto e o ponto
extremo offshore do transecto; teta=(asin(VCO/VHIP))/(pi/180); % Ângulo em graus da reta formada
por cada ponto e o ponto offshore do transecto; if TXoffshore == TXonshore; PIntPontox=TXoffshore; PIntPontoy=P1y; end

80
if TYoffshore == TYonshore; PIntPontox=P1x; PIntPontoy=TYoffshore; end if TXoffshore~=TXonshore && TYoffshore~=TYonshore; TCO=TYonshore-TYoffshore; TCA=TXonshore-TXoffshore; THIP=sqrt(TCO^2+TCA^2); K=THIP/VCA; VX=TCA/K; VY=TCO/K; PIntPontox=TXoffshore+VX; PIntPontoy=TYoffshore+VY; end a=(TYonshore-TYoffshore)/(TXonshore-TXoffshore); % Coeficiente
angular da reta; b=TYoffshore-(TXoffshore*a); % Coeficiente linear da reta; RY=(P1x*a)+b; if RY>P1y; % Ponto superior a posição da reta; Angulo=teta; end if RY<P1y; % Ponto inferior a posição da reta; Angulo=teta*(-1); end DEGREES(j,1)=P1x; DEGREES(j,2)=P1y; DEGREES(j,3)=Angulo; if Angulo>0; POSITIVO(j,1)=Angulo; NEGATIVO(j,1)=NaN; else POSITIVO(j,1)=NaN; NEGATIVO(j,1)=Angulo; end end CP=0; CN=0; [nl,nc]=size(POSITIVO); for w=1:1:nl; if POSITIVO(w,1) ~= NaN; CP=CP+1; end if NEGATIVO(w,1) ~= NaN; CN=CN+1; end end PPx=NaN; PPy=NaN; PNx=NaN; PNy=NaN; if CP~=0 && CN~=0; DP=min(POSITIVO(:,1)); %Angulo positivo DN=max(NEGATIVO(:,1)); %Angulo negativo [Dnl,Dnc]=size(DEGREES); for k=1:1:Dnl; if DP == DEGREES(k,3); PPx=DEGREES(k,1); PPy=DEGREES(k,2); end if DN == DEGREES(k,3); PNx=DEGREES(k,1);

81
PNy=DEGREES(k,2); end end end REALPOINTS(i,1)=TXoffshore; REALPOINTS(i,2)=TYoffshore; REALPOINTS(i,3)=TXonshore; REALPOINTS(i,4)=TYonshore; REALPOINTS(i,5)=PPx; REALPOINTS(i,6)=PPy; REALPOINTS(i,7)=PNx; REALPOINTS(i,8)=PNy; end %% Ponto no transecto [Rnl,Rnc]=size(REALPOINTS); for i=1:1:Rnl; TXoffshore=REALPOINTS(i,1); TYoffshore=REALPOINTS(i,2); TXonshore=REALPOINTS(i,3); TYonshore=REALPOINTS(i,4); PPx=REALPOINTS(i,5); PPy=REALPOINTS(i,6); PNx=REALPOINTS(i,7); PNy=REALPOINTS(i,8); X=POINTS(:,1); Y=POINTS(:,2); Z=POINTS(:,3); at=(TYonshore-TYoffshore)/(TXonshore-TXoffshore); ap=(PNy-PPy)/(PNx-PPx); bt=TYoffshore-(at*TXoffshore); bp=PPy-(ap*PPx); xp=(bp-bt)/(at-ap); yp=(at*xp)+bt; zp=griddata(X,Y,Z,xp,yp,'v4'); POINTONTRANSECT(i,1)=TXoffshore; POINTONTRANSECT(i,2)=TYoffshore; POINTONTRANSECT(i,3)=TXonshore; POINTONTRANSECT(i,4)=TYonshore; POINTONTRANSECT(i,5)=xp; POINTONTRANSECT(i,6)=yp; POINTONTRANSECT(i,7)=zp; end %% Arquivo de saida xlswrite ('A1_L2_09-12_PT.xls', POINTONTRANSECT);

82
APÊNDICE C
A seguir, é apresentado um exemplo da rotina VLC, utilizada para a validação dos dados. A
rotina calcula o erro absoluto ( ) entre os pontos corrigidos, e os pontos coletados em
campo:
%% VLC (Rotina para cálculo do erro entre pontos padronizados e medidos).
% Desenvolvida por JULIANA JACOMINI MENEGUCCI para o Trabalho de Conclusão
de Curso Intitulado: METODOLOGIA PARA CORREÇÃO DA MARÉ EM LEVANTAMENTOS DE
LINHA DE COSTA COM DGPS-RTK: ESTUDO DE CASO NA ENSEADA DO ITAPOCORÓI, SANTA
CATARINA, BRASIL, orientado pelo MSc. RAFAEL SANGOI ARAUJO.
% MENEGUCCI, J. J. Metodologia para Correção da Maré em Levantamentos de
Linha de Costa com DGPS-RTK: Estudo de Caso na Enseada do Itapocorói, Santa
Catarina, Brasil. 2011, 89p.Trabalho de Conclusão de Curso (Graduação).
Universidade do Vale do Itajaí, Centro de Ciências Tecnológicas da Terra e
do Mar, Curso de Oceanografia. Itajaí, Brasil, 2011.
clear all clc padronizado=xlsread(A1_L1_09-12_NP.xls'); real=xlsread('A1_L2_09-12_PT.xls'); format long g [Pnl,Pnc]=size(padronizado); for i=1:1:Pnl; PPx=padronizado(i,1); PPy=padronizado(i,2); PRx=real(i,5); PRy=real(i,6); if PRx ~= NaN && PRy ~= NaN; erro=sqrt(((PPx-PRx)^2)+((PPy-PRy)^2)); else erro=NaN; end RESULT(i,1)=PPx; RESULT(i,2)=PPy; RESULT(i,3)=PRx; RESULT(i,4)=PRy; RESULT(i,5)=erro; end %% Arquivo de saída; xlswrite ('A1_09-12_ERRO.xls', RESULT);

83
APÊNDICE D
Figura 30. Variação do nível da maré medida em campo (astronômica + meteorológica) no dia
09/12/2010, e previsão de maré (astronômica) de acordo com a DNH.
Figura 31. Variação do nível da maré medida em campo (astronômica + meteorológica) no dia
04/04/2011, e previsão de maré (astronômica) de acordo com a DNH.
Figura 32. Variação do nível da maré medida em campo (astronômica + meteorológica) no dia
29/04/2011, e previsão de maré (astronômica) de acordo com a DNH.
-0.4
0
0.4
0.8
1.2
00:00 04:00 08:00 12:00 16:00 20:00 00:00
Ele
vaçã
o (
m)
Hora
Variação da Maré - 09/12/2010
Medido
Previsto
-0.4
0
0.4
0.8
1.2
00:00 04:00 08:00 12:00 16:00 20:00 00:00
Ele
vaçã
o (
m)
Hora
Variação da Maré - 04/04/2011
Medido
Previsto
-0.4
0
0.4
0.8
1.2
00:00 04:00 08:00 12:00 16:00 20:00 00:00
Ele
vaçã
o (
m)
Hora
Variação da Maré - 29/04/2011
Medido
Previsto

84
APÊNDICE E
Tabela 10. Dados de declividade utilizados para correção das linhas de costa da área A1 (Alegre).
A1 - Alegre
Nome do Ponto 19/12/2010 - Sizígia 29/04/2011 - Quadratura
E N Dc (o) E N Dc (
o) Dp (
o)
D01 733132,594 7036674,252 5,500 733132,666 7036673,757 5,000 5,140
D02 733119,511 7036674,409 5,500 733119,562 7036673,410 5,500 5,400
D03 733106,559 7036673,230 6,000 733106,713 7036671,737 6,000 6,210
D04 733091,027 7036671,396 5,500 733091,071 7036670,898 6,500 6,870
D05 733077,772 7036670,508 5,500 733077,796 7036670,009 7,000 7,240
D06 733062,570 7036670,678 6,000 733062,561 7036670,178 7,000 6,710
D07 733049,737 7036670,959 6,000 733049,725 7036670,459 7,000 6,860
D08 733036,455 7036671,905 6,000 733036,626 7036672,890 6,500 7,360
D09 733022,760 7036672,940 6,000 733023,003 7036674,420 7,000 7,990
D10 733010,191 7036675,628 6,500 733010,531 7036677,089 6,000 7,780
D11 732997,725 7036678,690 6,500 732997,974 7036679,659 6,000 7,050
D12 732985,398 7036681,484 6,500 732985,700 7036682,437 6,000 6,480
D13 732973,363 7036684,777 6,500 732973,543 7036685,243 6,500 7,280
D14 732961,495 7036688,908 6,500 732961,495 7036688,908 6,000 5,880
D15 732949,989 7036692,484 7,000 732950,155 7036692,956 5,500 6,680
Projeção UTM - Zona 22 S Datum SAD 1969
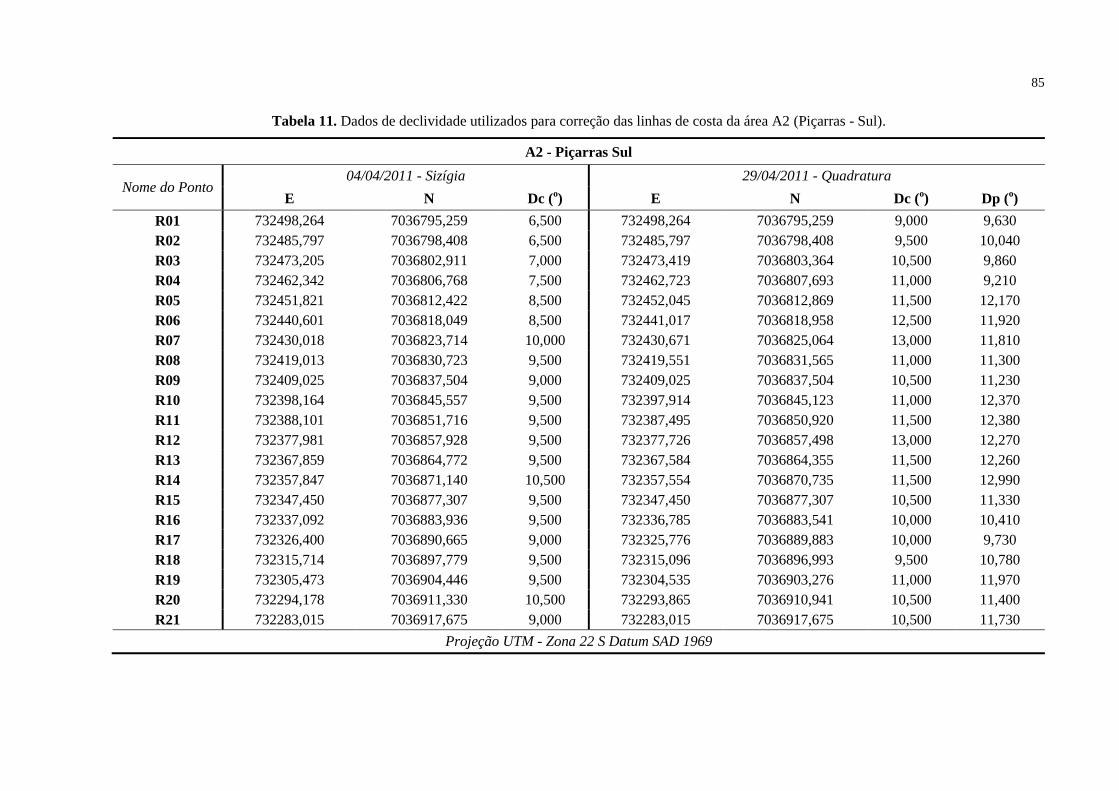
85
Tabela 11. Dados de declividade utilizados para correção das linhas de costa da área A2 (Piçarras - Sul).
A2 - Piçarras Sul
Nome do Ponto 04/04/2011 - Sizígia 29/04/2011 - Quadratura
E N Dc (o) E N Dc (
o) Dp (
o)
R01 732498,264 7036795,259 6,500 732498,264 7036795,259 9,000 9,630
R02 732485,797 7036798,408 6,500 732485,797 7036798,408 9,500 10,040
R03 732473,205 7036802,911 7,000 732473,419 7036803,364 10,500 9,860
R04 732462,342 7036806,768 7,500 732462,723 7036807,693 11,000 9,210
R05 732451,821 7036812,422 8,500 732452,045 7036812,869 11,500 12,170
R06 732440,601 7036818,049 8,500 732441,017 7036818,958 12,500 11,920
R07 732430,018 7036823,714 10,000 732430,671 7036825,064 13,000 11,810
R08 732419,013 7036830,723 9,500 732419,551 7036831,565 11,000 11,300
R09 732409,025 7036837,504 9,000 732409,025 7036837,504 10,500 11,230
R10 732398,164 7036845,557 9,500 732397,914 7036845,123 11,000 12,370
R11 732388,101 7036851,716 9,500 732387,495 7036850,920 11,500 12,380
R12 732377,981 7036857,928 9,500 732377,726 7036857,498 13,000 12,270
R13 732367,859 7036864,772 9,500 732367,584 7036864,355 11,500 12,260
R14 732357,847 7036871,140 10,500 732357,554 7036870,735 11,500 12,990
R15 732347,450 7036877,307 9,500 732347,450 7036877,307 10,500 11,330
R16 732337,092 7036883,936 9,500 732336,785 7036883,541 10,000 10,410
R17 732326,400 7036890,665 9,000 732325,776 7036889,883 10,000 9,730
R18 732315,714 7036897,779 9,500 732315,096 7036896,993 9,500 10,780
R19 732305,473 7036904,446 9,500 732304,535 7036903,276 11,000 11,970
R20 732294,178 7036911,330 10,500 732293,865 7036910,941 10,500 11,400
R21 732283,015 7036917,675 9,000 732283,015 7036917,675 10,500 11,730
Projeção UTM - Zona 22 S Datum SAD 1969

86
Tabela 12. Dados de declividade utilizados para correção das linhas de costa da área A3 (Itajuba).
A3 - Itajuba
Nome do Ponto 04/04/2011 - Sizígia 29/04/2011 – Quadratura
E N Dc (o) E N Dc (
o) Dp (
o)
I01 730727,322 7044262,628 7,000 730735,108 7044277,744 5,000 4,250
I02 730727,726 7044276,740 7,000 730735,273 7044261,747 5,000 5,270
I03 730727,434 7044248,190 6,000 730732,402 7044247,620 4,500 4,310
I04 730727,177 7044234,106 6,500 730735,677 7044234,041 4,500 5,220
I05 730727,555 7044216,535 6,500 730734,037 7044217,022 4,000 4,160
I06 730727,138 7044204,934 7,000 730734,619 7044204,403 4,500 5,110
I07 730727,465 7044190,875 7,000 730732,462 7044191,071 4,000 4,830
I08 730729,173 7044179,716 7,500 730734,173 7044179,750 4,500 5,470
I09 730729,602 7044165,764 7,000 730735,083 7044166,227 4,000 4,650
I10 730730,412 7044154,413 7,000 730736,841 7044153,458 4,500 5,370
I11 730730,525 7044140,882 6,000 730734,525 7044140,932 4,000 6,860
I12 730730,111 7044128,152 6,000 730736,598 7044127,738 4,000 4,680
I13 730729,538 7044114,866 6,500 730735,008 7044115,441 5,000 5,410
I14 730728,783 7044102,664 5,500 730732,782 7044102,560 4,500 4,270
I15 730727,885 7044089,792 5,500 730733,878 7044090,083 5,000 5,160
I16 730726,036 7044077,787 6,000 730731,535 7044077,705 5,000 4,610
I17 730726,350 7044064,686 6,000 730730,310 7044065,246 5,000 5,150
Projeção UTM - Zona 22 S Datum SAD 1969

87
Figura 33. Gráficos dos perfis realizados ao longo da zona de espraiamento da área 1, com as
equações das retas que serviram de base para determinação das declividades.

88
Figura 34. Gráficos dos perfis realizados ao longo da zona de espraiamento da área 2, com as
equações das retas que serviram de base para determinação das declividades.

89
Figura 35. Gráficos dos perfis realizados ao longo da zona de espraiamento da área 3, com as
equações das retas que serviram de base para determinação das declividades.


















