





Línguas
Páginas
Legal


CONTROLE CHAVEADO ROBUSTO DE SISTEMAS LINEARES DO TIPO LPV COM APLICA ÇÃOEM FALHAS
LUIZ FRANCISCOS. BUZACHERO∗† EDVALDO ASSUNÇÃO† MARCELO C. M. TEIXEIRA†
∗UTFPR - Universidade Tecnológica Federal do ParanáCampus de Apucarana
Rua Marcílio Dias, no 635, 86812-460 - Apucarana, PR, Brasil
†UNESP - Universidade Estadual PaulistaCampus de Ilha Solteira
Departamento de Engenharia ElétricaLaboratório de Pesquisa em Controle
Avenida José Carlos Rossi, no 1370, 15385-000 - Ilha Solteira, SP, Brasil
Email: [email protected],[email protected],[email protected]
Abstract— In this paper concepts and practical applications for the design of robust switched controlers with decay rate re-strinctions are discussed. A powerful feature of the technique is the possibility of the uncertainty being time-varying (LPV),without measuring the uncertain parameter at each instant of time, along with the advantages already known for the performanceof switched systems. A practical application in STII+AMDI system, wich simulates the security control of a building during anearthquake subject to structural failure appears to consolidate the technique.
Keywords— Robust switched control, Linear parameter varying (LPV), Structural Failures.
Resumo— Neste trabalho são abordados conceitos e aplicações práticas para o projeto de controladores robustos chaveados comrestrição de taxa de decaimento. Uma característica marcante da técnica é a possibilidade de controle de sistemas com as incertezaspodendo ser variantes no tempo, conhecidas como LPV, sem a necessidade de medir o parâmetro incerto a cada instante de tempo,além das vantagens de desempenho já conhecidas de sistemas chaveados. Uma aplicação prática no sistema STII+AMDI, quesimula o controle de segurança de uma edificação durante um terremoto sujeito a uma falha estrutural é apresentado para consolidara técnica.
Keywords— Controle chaveado robusto, Incertezas variantes no tempo (LPV), Falhas estruturais.
1 Introdução
A teoria de controle robusto tem apresentado nosúltimos anos soluções para problemas de estabili-dade e desempenho de sistemas sujeitos a incertezasparamétricas do tipo politópicas sem solução conhe-cida até então. Trabalhos consolidados verificaramque muitas técnicas flexibilizadas de estabilidade ro-busta apenas garantem a estabilidade para incertezasinvariantes no tempo, ou com taxa de variação muitopequena (Dahleh and Dahleh, 1991; Solo, 1994), oque acaba por restringir a aplicação prática da téc-nica, quando supõe-se que a incerteza possa variarno tempo. Uma forma de contornar esta proble-mática é a abordagem da teoria de sistemas chavea-dos (também conhecidos como sistemas híbridos),em função dos importantes resultados na literatura,que viabilizam o projeto de controladores robustos(Geromel and Deaecto, 2009; Deaecto et al., 2011;Souza et al., 2013; Souza et al., 2014), considerandoincertezas do tipo LPV, sem que limitações nas in-certezas e/ou na taxa de variação das mesmas se-jam impostas, quando os sistemas em questão são li-neares (Deaecto and Geromel, 2008), levando-se emconta a possibilidade de chaveamento entre subsis-temas (Branicky, 1998; Hespanha, 2004).
Em Geromel and Colaneri (2006) foram pro-postas técnicas eficazes para a estabilidade de sistemaslineares chaveados, entre as quais se apresentou uma
função Lyapunov-Metzler quadrática por partes, comuma função de chaveamentoσ baseada na escolhado mínimo da função, viabilizando, em seguida, oprojeto de controladores robustos para sistemas incer-tos e limitados por norma em Geromel and Deaecto(2009). Estas pesquisas culminaram em condições deestabilidade de sistemas sujeitos a incertezas politópi-cas do tipo LPV, garantindo que o sistema fosse glo-balmente assintoticamente estável como pode ser vistoem Deaecto et al. (2011). Esta técnica inovadorapossibilitou encontrar resultados menos conservadorese com um melhor desempenho global quando com-parada com as técnicas tradicionais. Em contrapartida,uma busca unidimensional deve ser realizada para queo problema possa ser trabalhado com condições LMIs,o que acaba por restringir um pouco a técnica.
Com base nessa teoria, aborda-se neste artigo umponto crítico no projeto de controladores chaveadospara sistemas robustos. O ponto abordado neste tra-balho é o fato de que o tempo de duração do transitóriopode ser maior do que as especificações de projeto.Para resolver este problema, propõem-se LMIs paralimitar a taxa de decaimento, garantindo que os au-tovalores do sistema realimentado estejam a esquerdade um escalarα, mesmo estando o sistema sujeito aincertezas.
Fazem-se implementações no sistemaSTII+AMDI da Quanser (Quanser, 2012a), quetem a função de simular uma edificação durante
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2564

um terremoto, com uma massa de compensaçãocontrolada por um motor no piso superior paraaliviar a deflexão das paredes da edificação durante aocorrência do mesmo. O sistema foi implementadoconsiderando uma falha no motor modelada comoincerteza politópica.
Utilizam-se os seguintes símbolos e notações notexto: M > 0 (< 0, ≥ 0, ≤ 0) indica que M ésimétrica positiva (negativa, positiva-semi, negativa-semi) definida;(′) indica transposição de um vetor oumatriz; (−1) indica a inversa de uma matriz;Sym{M}indicaM +M′; diag(·,·, . . . , ·) indica uma matriz dia-gonal de dimensões adequadas eindica o final dedemonstração.
2 Chaveamento entre subsistemas
Suponha um sistema composto por uma planta comincertezas politópica, onde a estabilidade deste sis-tema será verificada através do chaveamento conve-niente entre funções de Lyapunov quadráticas porpartes. Esse sistema pode então ser denominadocomo sistema politópico chaveado, tendo como van-tagem a possibilidade do sistema ser variante notempo (Deaecto et al., 2011). A abordagem apre-sentada a seguir é apenas introdutória. Concebem-se aqui, condições de estabilidade para o sistema in-certo através de funções de Lyapunov quadráticas porpartes, para que se formule, nas próximas seções, ochaveamento entre sistemas realimentados com res-trição de taxa de decaimento
Desta forma, considere o sistema híbrido
x(t) = Aλσ x(t), x(0) = x0, (1)
sendo definido para todot ≥ 0 para algumσ(x(t)) ∈K, comK = {1,2, ...,N}, ondeN é o número de vér-tices do politopo de incertezas, eλ pertence ao sim-plex unitárioΛ conforme definido em (2):
Λ = {λ ∈ RN : λ j ≥ 0,
N
∑j=1
λ j = 1}. (2)
O vetor dos estados éx(t) ∈ Rn e a matrizAλσ
dada por
Aλσ =N
∑j=1
λ jA jσ , (3)
sendo que o primeiro índice deA jσ refere-se ao vér-tice do politopo e o segundo à regra de chavea-mento, que será responsável pela escolha que verifi-cará a estabilidade do sistema incerto. Definindo afunção de Lyapunov quadrática por partes (Geromeland Colaneri, 2006):
v(x) := mini∈K
x′(t)Pix(t) = minλ∈Λ
(N
∑i=1
λix′(t)Pix(t)), (4)
sendo{P1,P2, ...,PN} ∈ Rn×n. Verifica-se que (4) não
é diferenciável para todox(t) ∈ Rn. Para este aspecto,
definiu-se o conjuntoI(x(t)) : Rn→ N, tal que:
I(x(t)) = {i : v(x) = x′(t)Pix(t)}, (5)
sendov(x) solução de (4) e desta formaI(x) podepossuir mais de um elemento cuja função (4) não édiferenciável, ou seja, a solução do mínimo não éúnica.
Desta forma, conceberam-se condições para quea regra de chaveamento dada por
σ(t) = minI(x(t)), (6)
faça com que a origem do sistema (1) seja globalmenteassintoticamente estável.
2.1 Matrizes Metzler
Para a compreensão do teorema a seguir, considere amatriz de Metzler denotada porM (Luenberger, 1979;Geromel and Colaneri, 2006), consistindo de todas asmatrizesΠ ∈ R
N×N, tais que
π ji ≥ 0, ∀ j 6= i,N
∑j=1
π ji = 0, ∀i. (7)
O ponto chave para a obtenção das condições deestabilidade é utilizar uma matriz Metzler dependentedo parâmetro desconhecido, isto é,Π(λ ) : Λ →K
N×N
(Geromel and Deaecto, 2009) cujos elementos sãodefinidos por
π ji :=
{
γλ j , j 6= iγ(λi −1) , j = i
, (8)
comγ ≥ 0.Pode-se verificar que eles constituem uma matriz
de MetzlerΠ(λ ) ∈ M para todoλ ∈ Λ. De fato, peladefinição (8) todos os elementos fora da diagonal prin-cipal são não negativos e as identidades
N∑j=1
π ji (λ ) =N∑j=1j 6=i
γλ j + γ(λi −1)
= γ(N∑j=1
λ j −1)
= 0,
(9)
são verificadas para cadai ∈K e todoλ ∈ Λ.Além disso, utilizandoΠ(λ ) ∈ M , temos que as
igualdades
N∑j=1
π ji (λ )Pj =N∑j=1j 6=i
γλ jPj + γ(λi −1)Pi
= γN∑j=1
λ jPj − γPi
= γN∑j=1
λ j(Pj −Pi),
(10)
são verdadeiras para cadai ∈ K e todoλ ∈ Λ. Este éum resultado fundamental para o projeto de controlerobusto em questão e que tornou possível a obtençãodas condições de estabilidade robusta que serão vistasna sequência.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2565

2.2 Condições para estabilidade robusta
De posse dos conceitos introduzidos, o Teorema 1a seguir foi adequado a partir do apresentado em(Deaecto, 2010) e será estendido para inclusão da taxade decaimento.
Teorema 1. (Deaecto, 2010) Sendo{Q1,Q2, ...,Qn}
um conjunto de matrizes simétricas semidefinidaspositivas, se existir um conjunto de matrizes simé-tricas definidas positivas{P1,P2, ...,Pn} e Π ∈ M
satisfazendo as seguintes desigualdades de Lyapunov-Metzler
A′
ji Pi +PiA ji + γ(Pj −Pi)+Qi < 0, (11)
então a lei de controle
σ(t) = minI(x(t)), (12)
faz com que o sistema(1) seja globalmente assintoti-camente estável.
Reproduziu-se a prova do Teorema 1 aqui para serútil nas demostrações dos próximos teoremas.
Prova: (Deaecto, 2010) Assuma que as matrizessimétricasPi para todoi ∈ K são soluções das de-sigualdades (11) para algumγ ≥ 0. Logo, multipli-cando o resultado porλ j ≥ 0 e somando para todoj = 1,2, ...,N, obtém-se
A′
λ iPi +PiAλ i + γN
∑j=1
λ j(Pj −Pi)+Qi < 0. (13)
Uma vez que (13) vale para todoλ ∈ Λ, utilizandoo resultado apresentado em (10), verifica-se que omesmo ocorre para
A′
λ iPi +PiAλ i +N
∑j=1
π ji (λ )Pj +Qi < 0, (14)
com i ∈K, Π(λ ) ∈ M e λ ∈ Λ.Como (4) não é diferenciável para todox(t)∈R
n,utiliza-se a derivada de Dini (Garg, 1998) à direita de(4) que, por definição, é dada por
D+v(x(t)) = limh→0+
supv(x(t +h))−v(x(t))
h. (15)
Supondoa regra de chaveamento dada porσ(t) =I(x(t)) = i, utilizando o Teorema de Danskin (Lasdon,1970) tem-se que
D+v(x(t)) = limh→0+
supv(x(t)+hAλ ix(t))−v(x(t))h
= minl∈I(x(t))
x′(t)(Aλ i′Pl +Pl Aλ i)x(t)
≤ x′(t)(Aλ i′Pi +PiAλ i)x(t),
(16)
em que a desigualdade assegura o fato de quei ∈I(x(t)).
Por outo lado lembrando quex′(t)Pjx(t) ≥
x′(t)Pix(t) = v(x) obtém-se de (14) que
D+v(x(t)) < x′(t)(−N∑j=1
π ji Pj −Qi)x(t)
= x′(t)(−N∑j=1j 6=i
π ji Pj −πii Pi −Qi)x(t)
≤ x′(t)(−N∑j=1j 6=i
π ji Pi −πii Pi −Qi)x(t)
= −(N∑j=1
π ji )x′(t)Pix(t)−x′(t)Qix(t)
= −x′(t)Qix(t)≤ 0.
(17)
Logo (17) prova que a origem do sistema (1) églobalmente assintoticamente estável.
Para fins de implementação prática é possível re-alizaraa escolha da regra de chaveamento através daescolha conveniente deσ(t) = minI(x(t)), dado queno instante seguinte a escolha desta função, será sem-pre escolhida a função mínima.
Adicionalmente, abordar-se-á a inserção doíndice de desempenho da taxa de decaimento, deacordo com Boyd et al. (1994) e utilizando-sea derivada de Dini (Garg, 1998):D+v(x(t)) ≤
−2αv(x(t)).
3 Projeto robusto chaveado e restrição de taxa dedecaimento
O objetivo nesta seção é determinar uma regra dechaveamento estabilizante para sistemas politópicosrealimentados conforme se apresentou na Figura 1, su-jeitos a taxa de decaimento maior ou igual a um es-calarα, descritos pela seguinte equação em espaço deestado
Figura 1: Esquemático do controle chaveado para umaplanta incerta.
x(t)u(t) SistemaIncerto
K1
K2
KN
σ(t)
Fonte: Adaptado de Geromel and Deaecto (2009)
x(t) = (Aλ +Bλ Kσ )x(t),x(0) = x0. (18)
Para isso, propõe-se o seguinte teorema.
Teorema 2. Se existirem matrizes simétricas Si , ma-trizes Yi para todo i∈K um escalarγ ≥ 0 e um escalarα ≥ 0 satisfazendo as desigualdades de Lyapunov-
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2566

Metzler[
Sym{A jSi +B jYi}− γSi +2αSi γSi
γSi −γSj
]
< 0, (19)
i, j ∈K
então a regra de chaveamentoσ(x(t)) =minI(x(t)) =minargmini∈Kx(t)′Si
−1x(t) e os ganhos de realimen-tação Ki = YiSi
−1 para todo i∈ K fazem com que aorigem x= 0 do sistema em malha fechada seja umponto de equilíbrio globalmente assintoticamente es-tável e o sistema estará sujeito a taxa de decaimentomaior ou igual aα.
Prova: Assuma que as matrizes simétricasSi paratodo i ∈ K são soluções das desigualdades (19) paraalgumγ ≥ 0 e α ≥ 0. Multiplicando ambos os ladosda desigualdade pordiag{Si
−1, I} e, então, aplicando
o complemento de Schur à segunda linha e à segundacoluna de (19), obtém-se:
Sym{Pi(A j +B jKi)}+ γ(Pj −Pi)+2αPi < 0. (20)
Multiplicando o resultado porλ j ≥ 0 e somandopara todoj = 1,2, ...,N obtém-se
Sym{Pi(Aλ +Bλ Ki)}+ γN
∑j=1
λ j(Pj −Pi)+2αPi < 0.
(21)Uma vez que (21) vale para todoλ ∈ Λ, utilizandoo resultado apresentado em (10), verifica-se que omesmo ocorre para
Sym{Pi(Aλ +Bλ Ki)}+N
∑j=1
π ji (λ )Pj <−2αPi , (22)
com i ∈K, Π(λ ) ∈ M e λ ∈ Λ.Assim sendo, a prova decorre do Teorema 1.Lembrando quex′(t)Pjx(t) ≥ x′(t)Pix(t) = v(x)
obtém-se de (11) que
D+v(x(t)) < x′(t)(−N∑j=1
π ji Pj −2αPλ )x(t)
≤ −(N∑j=1
π ji )x′(t)Pix(t)−2αx′(t)Pix(t)
= −2αx′(t)Pix(t)< 0.
Logo prova-se que a origem do sistema (18) é glo-balmente assintoticamente estável e o sistema estarásujeito a taxa de decaimento maior ou igual aα,garantindo que a mínima função energia estará sempreativa, lembrando que ˙v(t) ≤ −2αv(x), sendov(x) =mini∈K
(x′(t)Pix(t)).
Note que, se a restrição de taxa de decaimento forsatisfeita, a estabilidade robusta também o será.
A implementação prática a seguir foi utilizadaparaverificar a eficiência do método com a inserçãoda taxa de decaimento.
4 Implementação no sistema STII + AMDI
O protótipo AMDI, apresentado na Figura 2, é com-posto por uma estrutura simulando uma edificação,tendo no piso superior um sistema de amortecimentoativo com uma massa móvel. Este experimento temcomo foco o desenvolvimento de estudos para o pro-jeto de sistemas de controle que amorteçam vibraçõescausadas por terremotos ou por fortes ventos. Oequipamento também possibilita investigar ações decontrole em estruturas (Quanser, 2012a).
Figura 2: Protótipo STII + AMD-1 da Quanser perten-cente ao LPC da FEIS - UNESP.
Fonte: Elaborado pelo autor
O objetivo do experimento é atuar na massamóvel através de um motor, reduzindo assim os-cilações e vibrações indesejadas na estrutura. O sis-tema utilizado no deslocamento da base é chamado deSTII e foi originalmente desenvolvido com o intuito depesquisa ou ensino, envolvendo sistemas de vibração(Quanser, 2012b). Neste trabalho, utilizaremos esteequipamento apenas para gerar registros de terremotoscom os quais serão testadas as estratégias de controle.
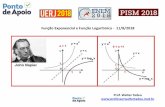
Considere o esquemático apresentado na Figura3. O deslocamento do carro (xc) que simboliza amassa móvel (Mc) é considerado positivo para a direitaquando vista pelo leitor, assim como o deslocamentodo patamar superior (xf , que tem como massaM f ).
Para pequenas variações angulares do piso su-perior, o sistema pode ser tratado como um sistemamassa-mola padrão de constanteK f a uma alturaH f
do chão, viabilizando assim uma aproximação coer-ente na modelagem do sistema.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2567
Figura 3: Modelo esquemático do AMD-I.xc > 0
xc
Mcxf > 0
xfFc
K f
M f
H f
Fonte:(Quanser, 2012a)
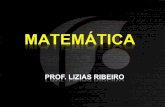
Os parâmetros utilizados neste exemplo para osistema AMDI são dados na Tabela 1.
Tabela 1: Parâmetros do sistema AMD-1Resistência de armadura do motor (ω) Rm 2,6Constante de torque do motor (N.m/A) Kt 0,00767
Eficiência eletromecânica do motor ηm 1Constante de eficiência do motor (V.s/rad) Km 0,00767
Eficiência do redutor planetário ηg 1Altura do patamar superior (m) H f 0,5334Massa do patamar superior (Kg) M f 1,38
Constante da mola para a modelagem (N/m) K f 500,9Inércia do rotor (Kg.m2) Jm 3,9×10−7
Massa total do carro (Kg) Mc 0,65Relação da engrenagem Kg 3,71
Raio do pinhão (engrenagem) (m) rmp 6,35×10−3
Coeficiente de amortecimento viscoso eq. (N.s/m) Beq 3
O modelo em espaço de estados que descreve osistemaAMDI é:
.
xc.
xf..
xc..
xf
= A
xc
xf.
xc.
xf
+BFc, (23)
sendo queA eB são dadas por:
A=
0 0 1 00 0 0 1
0Mcr2mpKf
Mcr2mpMf +JmK2gMc+JmK2
gMf−
r2mpBeq(Mc+Mf )
Mcr2mpMf +JmK2gMc+JmK2
gMf0
0 −
Kf (Mcr2mp+JmK2g)
Mcr2mpMf +JmK2gMc+JmK2
gMf
McBeqr2mpMcr2mpMf +JmK2
gMc+JmK2gMf
0
e B=
00
r2mpBeq(Mc+Mf )
Mcr2mpMf +JmK2gMc+JmK2
gMf
−
Mcr2mpMcr2mpMf +JmK2
gMc+JmK2gMf
. (24)
Nota-se,neste caso, que a entrada de controleé igual a força impressa pelo carro na aproximaçãomassa-mola (u= Fc). Desta forma, com o intuito deinserir uma incerteza na entrada do sinal de controle,optou-se por transformar a mesma na tensão do motor
que move o carro, ou seja, (u= Vm), dada a relaçãoexistente entreFc eVm apresentada abaixo:
Fc =−
ηgK2gηmKtKmxc(t)
Rmr2mp
+ηgKgηmKtVm
Rmrmp.
Assim, modificando as matrizesA e B, con-siderando agora a entrada de controle do sistema comou=Vm, as mesmas são dadas por:
A=
0 00 0
0Mcr2mpKf
Mcr2mpMf +JmK2gMc+JmK2
gMf
0 −
Kf (Mcr2mp+JmK2g)
Mcr2mpMf +JmK2gMc+JmK2
gMf
1 00 1
−
−McηgK2gηmKt Km+McBeqRmr2mp+Mf ηgK2
gηmKt Km+Mf BeqRmr2mp
Rm(Mcr2mpMf +JmK2gMc+JmK2
gMf )0
Mc(ηgK2gηmKt Km+BeqRmr2mp)
Rm(Mcr2mpMf +JmK2gMc+JmK2
gMf )0
,
B=
00
ηgKgηmKt rmp(Mc+Mf )
Rm(Mcr2mpMf +JmK2gMc+JmK2
gMf )
−McηgKgηmKt rmp
Rm(Mcr2mpMf +JmK2gMc+JmK2
gMf )
. (25)
Inserindoentão uma incerteza na nova entradade controle do sistema, simbolizando uma falha pordesgaste ou queima de componentes no módulo am-plificador que alimenta o sistema. Desta forma apotência do sistema será reduzida em 50%, e o sis-tema poderá ser representado como um politopo de in-certezas. Apresenta-se abaixo, os vértices, que atravésde uma combinação convexa geram o politopo:
Vértice 1 (100% do ganho de amplificação):
A1 =
[
0 0 1 00 0 0 10 278,9341 −18,6497 00 −336,0626 5,9716 0
]
e B1 =
[
00
2,9975−0,9598
]
.
(26)Vértice 2 (50% do ganho de amplificação):
A2 =
[
0 0 1 00 0 0 10 278,9341 −18,6497 00 −336,0626 5,9716 0
]
e B2 =
[
00
1,4987−0,4799
]
.
(27)Para o projeto dos controladores, obteve-se
factibilidade comγ = 7, eα = 4 responsável pela taxade decaimento do sistema, obtendo, desta forma, osseguintes ganhos:
K1 = [138,5469−700,0255 21,3987 11,6276] , (28)
K2 = [125,2463−623,7249 19,1661 10,9001] . (29)
O parâmeroα = 4 responsável pela taxa de de-caimento do sistema foi definido através de umavarredura para tentar definir os autovalores do sistemaincerto realimentado próximos dos sugeridos pelo fa-bricante de modo a preservar o equipamento, dado que
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2568

um valor baixo deα não proporcionaria um desem-penho satisfatório e um valor alto poderia danificar oequipamento.
O sistema AMDI possibilita a implementação dedados gravados de terremotos reais, em escala labo-ratorial, aumentando assim a realidade do experi-mento. Para este trabalho, foram escolhidos os da-dos do terremoto ocorrido em 1994, tendo como epi-centro o distrito Northridge, em San Fernando Valley,região de Los Angeles (Quanser, 2012a). Na Figura 4,apresentam-se os dados deste terremoto, assim comosua reprodução utilizando o STII e na sequência dotrabalho o deslocamento do piso inferior será chamadodexs(t) [m].
Figura 4: Dados obtidos durante o terremoto deNorthridge em 1994 e reproduzidos com o STII.
0 2 4 6 8 10 12 14 16−0.5
0
0.5
1
0 2 4 6 8 10 12 14 16
−3
−2
−1
0
1
2
3
4
Ace
lera
ção
dopi
so[m/s2
]P
osiç
ãodo
piso
[m]
dado realreproduzido
t[s]
t[s]
Fonte: (Quanser, 2012b)
A implementação no AMDI foi separada em trêsetapas. Primeiramente, realizou-se o experimento porcompleto no modo passivo, onde não existe ação decontrole e o motor que atua na massa móvel será res-ponsável apenas por não permitir que o carro deslizesobre o trilho simulando assim como se o sistema es-tivesse travado. Do contrário, estando solto, o carropoderia colidir com as extremidades causando danosao sistema de controle. Em seguida, no instante 18srealizou-se o experimento novamente com a ação doscontroladores chaveados sem falhas. No instante 36sinseriu-se uma falha de 50% no ganho de amplifi-cação, repetindo-se novamente o experimento com aação dos controladores chaveado e possibilitando a vi-sualização do desempenho do sistema com e sem fa-lhas.
Sendo assim, implementaram-se os controladoreschaveados (28) e (29) para os dados do terremoto deNorthridge, cujos resultados são apresentados nas Fi-guras 5 à 7.
Nas Figuras 5 e 6, apresentam-se, respectiva-mente, a posição do piso superior (xf (t)) e a diferençaentre a posição do piso superior e a posição do pisoinferior (xf (t)−xs(t)) em cada instante de tempo paraa implementação com e sem controle e antes e depoisda falha.
Figura 5: Oscilações no piso superior do AMD-1 paraos controladores chaveados.
0 5 10 15 20 25 30 35 40 45 50−0.03
−0.02
−0.01
0
0.01
0.02
0.03
Des
loca
men
todo
piso
supe
rior
[m]
xf (t)
Instante da falhaInício da ação de controleSemação de controle
t[s]
Fonte: Elaborado pelo autor
Figura 6: Diferença entre as oscilações no piso supe-rior (xf (t) [m]) e o deslocamento do piso (xs(t) [m])do AMD-1 para os controladores chaveados.
0 5 10 15 20 25 30 35 40 45 50−0.06
−0.04
−0.02
0
0.02
0.04
0.06
Pos
ição
rela
tiva
entr
exf(
t)[m
]e
x s(t)[
m]
xf (t)−xs(t)
Instante da falhaInício da ação de controleSemação de controle
t[s]
Fonte: Elaborado pelo autor
Na Figura 7, verifica-se a tensão de controle domotor (Vm(t)) e o controlador escolhidos a cada ins-tante de tempo (K1 eK2) conforme regraσ(t).
Figura 7: Sinal de controle e controlador ativo parauma falha de 50%.
0 5 10 15 20 25 30 35 40 45 50−10
−8
−6
−4
−2
0
2
4
6
8
10
Instante da falhaInício da ação de controleSemação de controle
Vm(t)
K1 ativo
K2 ativo
Sin
ais
deco
ntro
le[V
]eco
ntro
lado
rat
ivo
t[s]
Fonte: Elaborado pelo autor
Pode-se verificar nas Figuras 5 e 6, que a açãodos controladores chaveados robustos resultaram emmenores oscilações no piso superior do sistema AMD-I, sendo as diferenças de oscilações entre o piso su-perior e o piso inferior reduzidas consideravelmente,porém ainda existentes em função do atraso do sen-sor no piso superior em relação às oscilações do pisoinferior.
Verifica-se também, conforme Figura 7, quehouve um esforço de compensação no sistema para
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2569

suprir a queda de 50% de potência na entrada de con-troledo sistema, devido aos picos de tensão, que forammaiores após a falha, garantindo assim a estabilidaderobusta e o desempenho adequado devido a taxa dedecaimento (α = 4) do sistema.
Embora a técnica de controle tenha apresentadoum chaveamento intenso entre os controladores, paraeste tipo de implementação não foram necessáriascondições para a garantia de chaveamento suave, poisa própria inércia mecânica do sistema garantiu umaimplementação satisfatória sem a ocorrência de os-cilações na saída do sistema.
5 Conclusões
Neste trabalho, apresentou-se uma técnica para o pro-jeto de controladores chaveados robustos para a garan-tia de estabilidade de sistemas lineares incertos, comrestrição de taxa de decaimento, utilizando funções deLyapunov quadráticas por partes do tipo mínimo. Atécnica foi formulada por meio de LMIs, e quandonecessário realiza-se de uma busca unidimensional.
A técnica foi implementada em um protótipolaboratorial conhecido como STII+AMDI sujeito auma falha estrutural de 50%, mostrando a aplica-bilidade da técnica de controle chaveado robusto,apresentada no Teorema 2, em cuja implementaçãohouve um chaveamento intenso entre os controladores,levando a concluir que a nova técnica não apenas au-menta a factibilidade mas também melhora o desem-penho global do sistema, quando comparada com ou-tras técnicas de establilidade robusta que sintetizemum controlador único.
A técnica foi considerada satisfatória, porém emtrabalhos futuros será abordada a técnica de controleH∞ adequada para amortecer as oscilações do sistema.
Agradecimentos
Os autores agradecem as agências de fomentoFAPESP (Processo no. 2011/17610-0), CAPES eCNPq por darem suporte financeiro a esta pesquisa.
Referências
Boyd, S., El Ghaoui, L., Feron, E. and Balakrishnan,V. (1994). Linear matrix inequalities in systemsand control theory, 2 edn, SIAM Studies in Ap-plied Mathematics, Philadelphia.
Branicky, M. S. (1998). Multiple Lyapunov functionsand other analysis tools for switched and hybridsystems,IEEE Transactions on Automatic Con-trol, Piscataway43(4): 475–482.
Dahleh, M. and Dahleh, M. A. (1991). On slowlytime-varying systems,Automatica27: 201–205.
Deaecto, G. S. (2010). Projeto de controladoresdinâmicos com comutação: aplicação em sis-temas mecânicos e conversores de potência
CC-CC, PhD thesis, Universidade Estadual deCampinas, Campinas.
Deaecto, G. S. and Geromel, J. C. (2008). Controle desistemas lineares com comutação,Sba: Controle& Automação, Sociedade Brasileira de Automat-ica 19(4): 431 – 443.
Deaecto, G. S., Geromel, J. C. and Daafouz, J. (2011).Switched state-feedback control for continuoustime-varying polytopic systems,InternationalJournal of Control,Abingdon84(9): 1500–1508.
Garg, K. (1998).Theory of differentiation: a unifiedtheory of differentiation via new derivate theo-rems and new derivatives, John Wiley & Sons,New York.
Geromel, J. C. and Colaneri, P. (2006). Stabilityand stabilization of continuous-time switchedlinear systems,SIAM Journal Control Optimiza-tion 45: 1915–1930.
Geromel, J. C. and Deaecto, G. S. (2009). Switchedstate feedback control for continuous-time un-certain systems,Automatica45(2): 593–597.
Hespanha, J. (2004). Uniform stability of switchedlinear systems: extensions of lasalle’s invarianceprinciple,IEEE Transactions on Automatic Con-trol 49(4): 470–482.
Lasdon, L. S. (1970).Optimization theory for largesystems, Courier Dover Publications, Macmillan.
Luenberger, D. (1979).Introduction to dynamic sys-tems: theory, models, and applications, John Wi-ley & Sons, New York.
Quanser (2012a).Active Mass Damper - One Floor(AMD-1), User Manual.
Quanser (2012b).Specialty Plant: Shake Table II -Position Control and Earthquake Analysis, UserManual.
Solo, V. (1994). On the stability of slowly time-varying linear systems,Mathematics of Control,Signals, and Systems (MCSS)7: 331–350.
Souza, W. A., Teixeira, M. C. M., Santim, M. P. A.,Cardim, R. and Assunção, E. (2013). Onswitched control design of linear time-invariantsystems with polytopic uncertainties,Mathemat-ical Problems in Engineering2013: 10 p.
Souza, W. A., Teixeira, M. C. M., Santim, M. P. A.,Cardim, R. and Assunção, E. (2014). Onswitched regulator design of uncertain nonlin-ear systems using takagi-sugeno fuzzy models,IEEE Transactions on Fuzzy Systems. In press.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2570
Top Related