1-INTRODUÇÃO AO 8051_24_02_12_v2_2porfolha
31
05/03/2012 1 Microcontrolador 8051 Elaborado por: Flavio Eduardo de Moraes 1 INTRODUÇÃO AO 8051 F.E.M INTRODUÇÃO Com o avanço da tecnologia e a utilização da eletrônica digital, o emprego de Microcontroladores vêm sendo muito requisitado para um melhor desenvolvimento dos produtos em diversos segmentos. 2 INTRODUÇÃO AO 8051 F.E.M
-
Upload
john-kennedy -
Category
Documents
-
view
13 -
download
2
Transcript of 1-INTRODUÇÃO AO 8051_24_02_12_v2_2porfolha

05/03/2012
1
Microcontrolador 8051
Elaborado por:
Flavio Eduardo de Moraes 1INTRODUÇÃO AO 8051
F.E.M
INTRODUÇÃO
Com o avanço da tecnologia e a utilização da
eletrônica digital, o emprego de Microcontroladores
vêm sendo muito requisitado para um melhor
desenvolvimento dos produtos em diversos
segmentos.
2INTRODUÇÃO AO 8051
F.E.M

05/03/2012
2
VISÃO HISTÓRICA
Em 1970, começaram a ser utilizados
microprocessadores (intel 4004) em computadores
para uma maior eficiência no processamento de
dados. O microprocessador Intel foi um dos
precursores e, a partir daí, houve uma preocupação
em melhorar cada vez mais o sistema de
processamento de dados através dessescomponentes.
3INTRODUÇÃO AO 8051
F.E.M
APLICAÇÕES
Segurança - Alarmes, Portões Eletrônicos, Controle de Acesso.
Informática - Estabilizadores e No-Breaks, Controladores de
Mouse e Teclado.
Automobilísticas - Injeção Eletrônica, Freios ABS, Air Bag.
Telecomunicações - Identificadores de Chamadas, Conexão de
Equipamentos (Via modem e internet), Interface Homem-Máquina.
Indústria - Sistemas de Controle de Processos, Controle de
Motores, Robótica e Interface Homem-Máquina.
Automação predial - Controle de Acesso, Interruptores
Inteligentes.
4INTRODUÇÃO AO 8051
F.E.M

05/03/2012
3
DEFINIÇÃO DE
MICROPROCESSADOR
O microprocessador é a CPU (Central Processing Unit) é um componenteeletrônico responsável por executar tarefas de acordo com umprograma armazenado em uma unidade EXTERNA de memória.
Microprocessadores não possuem periféricos de armazenamento ou deE/S integrados no chip, possuem somente o necessário aoprocessamento dos dados (como cálculos e pelo controle das açõesdos componentes do sistema).
Um processador é capaz de trabalhar com dados sempre com umtamanho (em bits) específico. Esse tamanho é definido pelofabricante no projeto da pastilha microeletrônica.
Os tamanhos existentes atualmente são: 8, 16, 32 e 64 bits.
5INTRODUÇÃO AO 8051
F.E.M
DEFINIÇÃO DE
MICROPROCESSADOR
Exemplos:
Zilog Z-80 - 8 bits (usado essencialmente na década de 1980)
Intel 8086 - 16 bits (usado de meados de 1980 a meados de 1990)
Texas ARM Cortex A8 - 32 bits (processador voltado a sistemasembarcados: alto desempenho com baixo consumo de energia)
Intel Core i7 - 64 bits (usado nos desktops e notebooks atuais)
O seu propósito é executar tarefas específicas gravada em sua memóriade código (ROM), que são feitas em instruções de máquinaschamadas assembler.
6INTRODUÇÃO AO 8051
F.E.M

05/03/2012
4
DEFINIÇÃO DE
MICROPROCESSADOR
RECURSOS EXTERNOS
ULAUnidade Lógica
Aritmética
REGISTRADORES
Un
idad
e D
e C
on
tro
le
MICROPROCESSADOR
7INTRODUÇÃO AO 8051
F.E.M
A CPU é formada por registradores, contador de programa,
registrador de Instruções, unidade de decodificação, ULA,
acumulador, unidade de controle.
REGISTRADORES
Sevem para armazenamento temporário das informações de
utilidade interna ou externa à CPU. O sinal de porta I/O pode ser
lido diretamente no registrador equivalente, cujo conteúdo é um
reflexo do que há na entrada física da porta.
PROGRAM COUTER (CONTADOR DE PROGRAMA)
Serve para endereçar aproxima instrução a ser lida pelo
microprocessador.
C.P.U INTERNAMENTE
8INTRODUÇÃO AO 8051
F.E.M

05/03/2012
5
INSTRUCTION REGISTER (REGISTRADOR DE INSTRUÇÕES)
É o local para onde se dirige o código de instrução que foi retirada da
ROM por meio do endereço dado pelo PC.
DECODE UNIT (UNIDADE DECODIFICADORA)
Local em que a instrução é decodificada.
ARITHMETIC LOGIC UNIT (UNIDADE LÓGICA E ARITMÉTICA ULA)
É o local em que são realizadas operações lógicas.
CONTROL UNIT (UNIDADE DE CONTROLE)
Processa o controle de fluxo das informações a fim de realizar a
instrução recebida.
C.P.U INTERNAMENTE
9INTRODUÇÃO AO 8051
F.E.M
O microprocessador limita-se apenas a efetuar cálculos que são
recolhidos e destinados aos recursos externos a este.
Assim para ter um sistema completo é necessário outros recursos
como RAM, ROM , PORTA PARALELA E SERIAL,TIMERS e
outros.
MICROPROCESSADOR MAIS OS
PERIFÉRICOS
RECURSOS EXTERNOS10
INTRODUÇÃO AO 8051
F.E.M

05/03/2012
6
MICROPROCESSADOR MAIS OS
PERIFÉRICOS
11
INTRODUÇÃO AO 8051
F.E.M
Barramento
de endereço
Barramento
de dados
Barramento
de controle
Para que o microprocessador possa comunicar com os periféricos
externos, são necessários a utilizações das vias de acesso como:
-Barramento de Endereços, Controle Auxiliar, dados
Circuitos periféricos típicos: reset, oscilador, gerenciador de
memória, interfaces (SATA, PATA, DVI, HDMI, UART, I2C, SPI,
etc)
MICROPROCESSADOR MAIS OS
PERIFÉRICOS
12INTRODUÇÃO AO 8051
F.E.M

05/03/2012
7
Vias de controle de endereços
Serve para o microprocessador selecionar com qual posição de
memória ou periféricos deseja se comunicar.
Vias de controle auxiliar
Vias de controle selecionar com qual periférico a CPU vai
selecionar (RAM,ROM, interfaces).
Vias de I/O
Por onde são recebidos os sinais de entrada (como por exemplos
chaves em configuração pull-up ou pull-down)ou enviar sinais de
saídas para acionamentos de periféricos de saídas (com drivers
de potência como reles ou transistores).
MICROPROCESSADOR MAIS OS
PERIFÉRICOS
13INTRODUÇÃO AO 8051
F.E.M
Oscilador
É o clock da CPU que permite que o microprocessador realize as
tarefas internas e externas de maneira sincronizada e com
velocidade predeterminada.
Reset
Responsável para que a CPU inicie suas rotinas internas a partir
das primeira instrução no endereço 0000h.
Interrupção
Pinos que permitem interromper o programa principal e desviada
para executar o programa a interrupção e retorna para o
programa principal.
MICROPROCESSADOR MAIS OS
PERIFÉRICOS
14INTRODUÇÃO AO 8051
F.E.M

05/03/2012
8
FUNCIONAMENTO DA CPU
1-O endereço do PC é posto na via de endereços (que é
o endereço desta próxima instrução a ser lida).
15INTRODUÇÃO AO 8051
F.E.M
FUNCIONAMENTO DA CPU
2-O sinal de controle da ROM é ativado.
16INTRODUÇÃO AO 8051
F.E.M

05/03/2012
9
FUNCIONAMENTO DA CPU
3-A instrução é lida na ROM, no endereço dado pelo
program couter (no caso no endereço “N”) e é lida pela
via de dados. Esses três passos são chamados ciclo de
busca ou fetch.
17INTRODUÇÃO AO 8051
F.E.M
FUNCIOAMENTO DA CPU
4-A instrução é carregada e armazenada no Registrador
de Instruções (IR) e decodificada pela Unidade de
Decodificação da instrução.
18INTRODUÇÃO AO 8051
F.E.M

05/03/2012
10
FUNCIONAMENTO DA CPU
5-O PC é incrementado para ler a próxima instrução
(apontará para “N+1”).
19INTRODUÇÃO AO 8051
F.E.M
FUNCIONAMENTO DA CPU
6-Inicia novo ciclo, auxiliado pela a Unidade de Controle
e pelos registradores, decodificado pela Unidade de
Decodificação executado pela ULA.
20INTRODUÇÃO AO 8051
F.E.M

05/03/2012
11
ARQUITETURA HARVARD
21INTRODUÇÃO AO 8051
F.E.M
Baseia-se em um conceito mais recente que a de Von-Neumann, visando
maior velocidade de processamento. É uma arquitetura de computador que se
distingue das outras por possuir duas memórias diferentes (dados e programa)
e independentes em termos de barramento e ligação ao processador.
Memória de Programa: É a memória onde armazena o programa a ser
executado ( imutável).
ARQUITETURA HARVARD
Memória de Dados: É a memória onde os dados são processados podendo ser
modificados durante a execução do programa.
Baseada também na separação de barramentos de dados das memórias onde
estão as instruções de programa e das memórias de dados, permitindo que um
processador possa acessar as duas simultaneamente, obtendo um
desempenho melhor.
Isso significa que o sistema fica todo o tempo executando instruções, o que
acarreta um significativo ganho de velocidade. Enquanto uma instrução está
sendo executada, a seguinte está sendo lida. Esse processo é conhecido como
pipelining.
22INTRODUÇÃO AO 8051
F.E.M

05/03/2012
12
ARQUITETURA HARVARD
É importante notar que o barramento de endereço e de dados são
comuns às duas memórias, o que impede que elas sejam
acessadas ao mesmo tempo, assim tendo mais velocidade no
acesso aos dados.
23INTRODUÇÃO AO 8051
F.E.M
CISCCISC
Complex Instruction Set Computer, (Computador com um
Conjunto Complexo de Instruções).
Caracterização das Arquiteturas CISC:Caracterização das Arquiteturas CISC:
•Conjunto complexo de instruções ( MAIS 100 Instruções)
•Diversos formatos de instruções
•Operando sempre em registros ou memória
•Ciclo máquina maior e variável
24INTRODUÇÃO AO 8051
F.E.M

05/03/2012
13
RISCRISC
Reduced Instruction Set Computer(Computador com um
Conjunto Reduzido de Instruções ).
Caracterização das Arquiteturas RISC:Caracterização das Arquiteturas RISC:
•Conjunto reduzido e simples de instruções (35 instruções)
•Formatos simples e regulares de instruções
•Operando sempre em registros
•Modos simples de endereçamento à memória
•Uma operação elementar por ciclo máquina 25
INTRODUÇÃO AO 8051
F.E.M
EXERCICIOS
1-CITE OS GRANDES BLOCOS QUE COMPÕEM A ARQUITETURA DE UM
MICROPROCESSADOR?
2-QUAIS SÃO OS PERIFÉRICOS COMUNS AOS
MICROPROCESSADORES?
3-DESCREVA O FUNCIONAMENTO DA CPU.
4-O QUE CARACTERÍZA A ARQUITETURA RISC?
5-O QUE CARACTERÍZA ARQUITETURA CISC?
6-COM BASE NAS SUAS RESPOSTAS ANTERIORES, QUAIS SÃO AS
DIFERENÇAS ENTRE RISC E CISC. 26INTRODUÇÃO AO 8051
F.E.M

05/03/2012
14
SISTEMAS COMPUTACIONAIS
Um sistema de computação clássico é composto por:
• uma CPU (Central Processing Unit);
• por portas de I/O (Input/Output) paralela e serial para a
comunicação com o computador, através de periféricos;
• por memórias RAM e ROM.
Vale ressaltar que a CPU é a responsável pelo
processamento dos dados (cálculos) e pelo controle das
ações dos componentes do sistema.
27INTRODUÇÃO AO 8051
F.E.M
SISTEMAS COMPUTACIONAIS
O microprocessador é justamente um tipo de CPU, é
um componente eletrônico responsável por executar
tarefas de acordo com um programa, possuem as
portas de I/O mas não possuem interfaces de I/O (que
fazem algum condicionamento de sinal).
O microcomputador constitui um sistema de
computação, a partir de um microprocessador, deve-
se inserir os recursos de memória e funções de I/O,
não disponíveis no chip do microprocessador apenas
28INTRODUÇÃO AO 8051
F.E.M

05/03/2012
15
Muitos fabricantes integram os componentes que formam o
microcomputador em um chip. Geralmente um single-chip é
indicado para pequenas aplicações, que não necessitam de todos
os recursos de um sistema de computação completo.
Quando o single-chip é utilizado para controlar pequenos
sistemas (eletrodomésticos, brinquedos, subsistemas de carros) e
monitorar funções durante um processo, ele é freqüentemente
denominado microcontrolador. O microcontrolador é, assim,
equivalente a um "microcomputador de bolso".
SISTEMAS COMPUTACIONAIS
29INTRODUÇÃO AO 8051
F.E.M
RESUMO
• Microprocessador - somente a CPU
• Microcomputador - CPU + periféricos externos
• Microcontrolador - CPU + periféricos internosintegrados (computador de um chip só)
SISTEMAS COMPUTACIONAIS
30INTRODUÇÃO AO 8051
F.E.M

05/03/2012
16
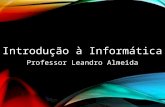
DEFINIÇÃO DE MICROCONTROLADOR
O microcontrolador é a integração entre o
microprocessador (CPU) com os outros periféricos do
tipo memórias (RAM e ROM) , controladores de
interrupção, temporizadores, interface serial,
controlador de vias, I/O e oscilador.
31INTRODUÇÃO AO 8051
F.E.M
Oscilador
Porta de
Entrada
CPU
Micro-
processador
Memória
ROM
Memória
RAM
Porta de
SaídaTimer
Serial TX e
RX
Conversor
A/D
DIAGRAMA DE BLOCOS DE UM
MICROCONTROLADOR
32INTRODUÇÃO AO 8051
F.E.M

05/03/2012
17
Núcleo de um Microcontrolador
O circuito integrado de um Intel 8742, um
microcontrolador de 8 bits que inclui uma
CPU operando em 12 MHz, 128 bytes de
RAM, 2048 bytes de EPROM e
entrada/saída num mesmo chip
33INTRODUÇÃO AO 8051
F.E.M
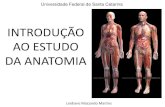
CONTROLE
DE
INTERRUPÇÃO
CPU
OSCILADORCONTROLE
DE
BARRAMENTO
RAM
I/O SERIAL
TIMER 1
TIMER 0
ROM
P0 P1 P2 P3
TXD RXD
ENDEREÇO/DADO
WR RD
TIMER 0/1
SERIALINT 0/1
O MICROCONTROLADOR 8051 Arquitetura básica
34INTRODUÇÃO AO 8051
F.E.M

05/03/2012
18
CPUCPU
CPUCPU - CCentral PProcessing UUnit
( Unidade Central de Processamento)
Principal parte do microcontrolador pois é nele que é
feito o controle das vias, acesso aos periféricos internos,
e operações lógicas e aritméticas.
Sempre segue as diretivas gravadas na memória ROM
(ou suas derivações).
35INTRODUÇÃO AO 8051
F.E.M
ROM ROM
ROMROM – RREAD OONLY MMEMORY ( Memória Apenas de Leitura)
Memória de armazenamento das instruções que serão
executadas pelo microntrolador. É nessa memória que
fica gravada a o programa criado por um programador
programas chamados de Firmware.
É um tipo de memória inalterável mesmo após reset da
máquina.
É TAMBÉM CONHECIDA COMO MEMÓRIA DEPROGRAMA
36INTRODUÇÃO AO 8051
F.E.M

05/03/2012
19
DERIVAÇÕES DA ROMDERIVAÇÕES DA ROM
PROM : Programmable Read-Only Memory, ou
(memória programável só de leitura).
A memória pode ser gravada só uma vez e o aceso a
ela é somente de leitura, significa que, ao contrário do
que acontece com a memória convencional, a
programação não pode ser alterada. Esse tipo de
memória é usada para armazenar permanentemente os
programas.
O processo de gravação é por pulso elétrico. Enquanto
uma ROM é vem com seu conteúdo gravado durante a
fabricação. 37INTRODUÇÃO AO 8051
F.E.M
DERIVAÇÕES DA ROMDERIVAÇÕES DA ROM
EPROM :Erasable Programmable Read-Only Memory (
memória programável apagável somente de leitura).
Memória que mantém seus dados quando a energia é
desligada, seu processo de gravação é através de um
gravador de EPROM. Uma vez programado, uma
EPROM pode ser apagada apenas por exposição a luz
ultravioleta (em média 30 minutos).
38INTRODUÇÃO AO 8051
F.E.M

05/03/2012
20
DERIVAÇÕES DA ROMDERIVAÇÕES DA ROM
EEPROM: Electrically-Erasable Programmable Read-Only
Memory ou Memória programavél apagavel eletricamente)
Pode ser programada e apagada várias vezes, eletricamente.
Entretanto a maioria das memórias EEPROM faz o apagamento
do conteúdo do endereço automaticamente antes da gravação.
As EEPROM necessitam de maior área que as memórias flash,
porque cada célula geralmente necessita de um transistor de
leitura e outro de escrita, ao passo que as células da memória
flash só necessitam de um.
39INTRODUÇÃO AO 8051
F.E.M
DERIVAÇÕES DA ROMDERIVAÇÕES DA ROM
FLASH MEMORY:É um tipo de memória do tipo
EEPROM, mas semelhante a Memória RAM, permitindo
que múltiplos endereços sejam apagados ou escritos
numa só operação. preserva o seu conteúdo sem a
necessidade de fonte de alimentação.
Memória flash é do tipo não volátil (não precisa de
energia para manter as informações
armazenadas).Esse tipo de memória oferece um tempo
de acesso rápido.
Possui grande capacidade de armazenamento.
40INTRODUÇÃO AO 8051
F.E.M

05/03/2012
21
RAMRAM
RAMRAM – RRANDOM AACCES MMEMORY (Memória de Acesso
Aleatório)
Memória de armazenamento temporário de informações , onde os
dados são carregados apenas por acesso imediato, como valor
da leitura de dados externos ou auxilio em operações aritméticas.
É nessa região de memória que se encontram os dados dos
registradores internos e os estados dos ports.
Essa memória perde informações caso seja dado um reset na
máquina.
É CONHECIDA TAMBÉM COMO MEMÓRIA DE DADOS
41INTRODUÇÃO AO 8051
F.E.M
INPUT/OUTPUT (I/O)INPUT/OUTPUT (I/O)
Para que um sistema possa fazer uma aplicação prática
é necessário que ele comunique-se com o exterior.
Esses dispositivos denominam-se dispositivos de
ENTRADA (IN) e SAÍDA (OUT). São nos I/O que
podemos fazer uma comunicação com uma memória
externa, acionamentos (led, transistores,rele outros),
leitura de botões e sensores.
No caso em um 8051 cada port independente de ser
entrada ou saida, é formado por 8 bits (o port P2 possui8 bits, identificados por P2.0 a P2.7).
42INTRODUÇÃO AO 8051
F.E.M

05/03/2012
22
OSCILADOROSCILADOR
É um componente externo responsável por gerar pulsos
de clock para execução sincronizada de qualquer
atividade interna ou externa a máquina.
O 8051 não possui um clock interno e sendo assim deve
ser colocado um cristal, conforme a figura abaixo
Normalmente o cristal clock é de 11.0592 (mais preciso
para utilização em comunicação serial) ou 12 Mhz.
43INTRODUÇÃO AO 8051
F.E.M
CONTROLE DE BARRAMENTOSCONTROLE DE BARRAMENTOS
É responsável pelo acionamento dos pinos que
controlam o direcionamento dos dados
enviados/recebidos pelo barramento de dados e
endereços, instruindo para qual elemento do
microcontrolador devem ser carregado seja em
uma RAM ou ROM externa através dos pinos
READ – RD E WRITE- WR.44
INTRODUÇÃO AO 8051
F.E.M

05/03/2012
23
SERIALSERIAL
SÃO PINOS QUE SERVEM COMO COMUNICAÇÃO COM
OUTROS PERIFÉRICOS EXTERNOS AO
MICROCONTROLADOR DE FORMA SERIAL ATRAVÉS DO
PROTOCOLO DE COMUNICAÇÃO RS 232 (comunicação
entre UART).
A DISTÂNCIAS SUPERIORES A 0,5m DEVE-SE ASSOCIAR UMCI MAXIM 232 PARA MAIOR ALCANCE.
O Driver UART é o MAX232, PARA SISTEMAS ALIMENTAS COM
5V, OU MAX3232, PARA SISTEMAS ALIMENTADOS COM 3,3V).
POR ESSA INTERFACE É POSSIVEL FAZER UM
MICROCONTROLADOR COMUNICAR COM OUTRO
MICROCONTROLADOR, PC, MODEM, MODULO GPS.45
INTRODUÇÃO AO 8051
F.E.M
TIMERS/COUNTERSTIMERS/COUNTERS
São dispositivos que fazem contagem de tempo ou
incremeto. Os TIMERS são mais precisos para poder
fazer uma contagem de tempo do que se fazer via
programa. Os COUTER realizam contagens de
elementos externos de forma paralela a execução do
programa.
46INTRODUÇÃO AO 8051
F.E.M

05/03/2012
24
CONTROLE DE INTERRUPÇÃOCONTROLE DE INTERRUPÇÃO
Permite interromper a execução normal de um
programa, pela ativação de um dispositivo externo
(podendo ser pelos pinos de interrupção,
temporizadores ou quando há comunicação serial) e
atende às tarefas planejadas pela interrupção.
47INTRODUÇÃO AO 8051
F.E.M
EXERCICIOS
8-DEFINA MICROPROCESSADOR
9-DEFINA MICROCOMPUTADOR
10-DEFINA MICROCONTROLADOR
11-COM BASE NAS SUAS RESPOSTAS ANTERIORES, QUAIS SÃO AS
DIFERENÇAS ENTRE MICROPROCESSADOR E MICROCOMPUTADOR.
12-DESENHE OS BLOCOS QUE COMPÕE A ARQUITETURA DE UM
MICROCONTROLADOR
13-Descreva as sobre as principais partes que compõe a arquitetura básica de
um 8051.
a)CPU e)Oscilador i)controle de interrupção
b)ROM f)serial
C)RAM g)Controle de barramentos
D)I/O h)TIMERS/COUTERS
48INTRODUÇÃO AO 8051
F.E.M

05/03/2012
25
8051 BÁSICO8051 BÁSICO
-Microcontrolador de 8 bits (processa dados com 8 bits)
-RAM interna de uso geral de 128Bytes e 128Bytes
correspondentes aos registradores especiais.
-ROM de até 64kB (típico de 8kB)
-4 ports de I/O
-2 Timers de 16 bits
-1 Interface serial
-Ciclos típicos de instrução de 1 a 2us a 12MHz
Entradas de interrupção externa
-Capacidade de 64kB de endereçamento de ROM
-Capacidade de 64kB de endereçamento de RAM
OBS: O modelo de microcontrolador SEMPRE deve atender
as necessidades do projeto!
49INTRODUÇÃO AO 8051
F.E.M
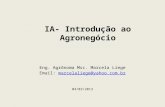
PINAGEM 8051
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
RST
(RXD) P3.0
(TXD) P3.1
(INT0) P3.2
(INT1) P3.3
(T0) P3.4
(WR) P3.6
(RD) P3.7
XTAL2
XTAL1
GND
1
2
3
4
5
6
7
8
9
10
12
11
13
14
16
17
18
15
19
20
40
39
38
37
36
35
34
33
32
31
29
30
28
27
25
24
23
26
22
21
VCCP0.0 (AD0)
P0.1 (AD1)
P0.2 (AD2)
P0.3 (AD3)
P0.4 (AD4)
P0.5 (AD5)
P0.6 (AD6)
P0.7 (AD7)
EA
ALE
PSEN
P2.7 (A15)
P2.6 (A14)
P2.5 (A13)
P2.4 (A12)
P2.3 (A11)
P2.2 (A10)
P2.1 (A9)
P2.0 (A8)
(T1) P3.5
PORTA 0
PORTA 2
PORTA 3
PORTA 1
50INTRODUÇÃO AO 8051
F.E.M

05/03/2012
26
AT 89S8253 AT89S52AT 89S8253 AT89S52
51INTRODUÇÃO AO 8051
F.E.M
AT 89S8253AT 89S8253 AT89S8252AT89S8252
-Compatível com produtos MCS-
51.
-12kBytes de memória FLASH de
programa.
-Interface de comunicação para
gravação do tipo SPI.
-2kByte de memória EEPROM de
dados.
-Tensão de operação entre 2,7 a
5,5V.
-1 Interface serial.
-3 contadores/temporizadores de
16bits.
-”cão de guarda” programável.
-4 níveis de prioridade em
interrupção
-Compatível com produtos MCS-
51.
-8kBytes de memória FLASH de
programa.
-Interface de comunicação para
gravação do tipo SPI.
-2kByte de memória EEPROM de
dados.
-Tensão de operação entre 4 a 6V.
-1 Interface serial.
-
-”cão de guarda” programável.
-
52INTRODUÇÃO AO 8051
F.E.M

05/03/2012
27
AT 89S8253AT 89S8253
SINAIS VITAISSINAIS VITAIS
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
RST
(RXD) P3.0
(TXD) P3.1
(INT0) P3.2
(INT1) P3.3
(T0) P3.4
(WR) P3.6
(RD) P3.7
XTAL2
XTAL1
GND
1
2
3
4
5
6
7
8
9
10
12
11
13
14
16
17
18
15
19
20
40
39
38
37
36
35
34
33
32
31
29
30
28
27
25
24
23
26
22
21
VCCP0.0 (AD0)
P0.1 (AD1)
P0.2 (AD2)
P0.3 (AD3)
P0.4 (AD4)
P0.5 (AD5)
P0.6 (AD6)
P0.7 (AD7)
EA
ALE
PSEN
P2.7 (A15)
P2.6 (A14)
P2.5 (A13)
P2.4 (A12)
P2.3 (A11)
P2.2 (A10)
P2.1 (A9)
P2.0 (A8)
(T1) P3.5
•VCC e GND – Alimentação do Chip
•RST – Disparador do chip quando quer iniciar
adequadamente sua função.
•XTAL1 E XTAL2 – Entrada dos pulsos de Clock
53INTRODUÇÃO AO 8051
F.E.M
PORT P0PORT P0
PORT P0PORT P0
•É utilizado como um PORT de uso geral (I/O)
desde que não esteja sendo usado por
nenhuma memória externa.
•Pode ser utilizado esse PORT como um
barramento multiplexados no tempo
(barramento de endereços ou barramento de
dados) de 8 vias para memórias RAM ou
ROM externas.Nesta configuração é
necessário a utilização do pino ALE para
multiplexar externamente os DADOS E
ENDEREÇOS.
OBS:Os endereços em uma memória são de
16bits e para isso é necessário a utilização do
PORT2 junto com o PORT0 (quando estiver
na função endereço). Já nos DADOS são de 8
bits e apenas o PORT0 é suficiente.
•
SINAIS VITAISSINAIS VITAIS
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
RST
(RXD) P3.0
(TXD) P3.1
(INT0) P3.2
(INT1) P3.3
(T0) P3.4
(WR) P3.6
(RD) P3.7
XTAL2
XTAL1
GND
1
2
3
4
5
6
7
8
9
10
12
11
13
14
16
17
18
15
19
20
40
39
38
37
36
35
34
33
32
31
29
30
28
27
25
24
23
26
22
21
VCCP0.0 (AD0)
P0.1 (AD1)
P0.2 (AD2)
P0.3 (AD3)
P0.4 (AD4)
P0.5 (AD5)
P0.6 (AD6)
P0.7 (AD7)
EA
ALE
PSEN
P2.7 (A15)
P2.6 (A14)
P2.5 (A13)
P2.4 (A12)
P2.3 (A11)
P2.2 (A10)
P2.1 (A9)
P2.0 (A8)
(T1) P3.5
54INTRODUÇÃO AO 8051
F.E.M

05/03/2012
28
PORT P1PORT P1
PORT P1PORT P1
É utilizado como um PORT de uso geral (I/O).
Os pinos P1.5, P1.6, P1.7 são pinos
responsáveis pela gravação do
microcontrolador. São Nesses pinos que são
ligados circuitos de gravação de interfaces
paralelas, seriais ou USB.
O protocolo de comunicação para a gravação é
o SPI onde:
P1.5: MOSI – Master out Slave In
P1.6:MISO – Master in Slave out
P1.7:SCK – Sincroniza dados
SINAIS VITAISSINAIS VITAIS
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
RST
(RXD) P3.0
(TXD) P3.1
(INT0) P3.2
(INT1) P3.3
(T0) P3.4
(WR) P3.6
(RD) P3.7
XTAL2
XTAL1
GND
1
2
3
4
5
6
7
8
9
10
12
11
13
14
16
17
18
15
19
20
40
39
38
37
36
35
34
33
32
31
29
30
28
27
25
24
23
26
22
21
VCCP0.0 (AD0)
P0.1 (AD1)
P0.2 (AD2)
P0.3 (AD3)
P0.4 (AD4)
P0.5 (AD5)
P0.6 (AD6)
P0.7 (AD7)
EA
ALE
PSEN
P2.7 (A15)
P2.6 (A14)
P2.5 (A13)
P2.4 (A12)
P2.3 (A11)
P2.2 (A10)
P2.1 (A9)
P2.0 (A8)
(T1) P3.5
55INTRODUÇÃO AO 8051
F.E.M
PROTOCOLO SPI (GRAVAÇÃO)
O protocolo SPI (Serial Peripheral Interface) foi desenvolvido pela
Motorola para a linha de processadores da família MC68K.
O SPI é um dos protocolos de comunicação mais utilizados em
sistemas eletrônicos menos complexos, pois é rápido, de fácil
aplicação.
Em geral é utilizado para comunicações que requerem
simplicidade e velocidade, com dispositivos que estão numa
mesma placa.
O SPI é um protocolo síncrono, opera no modo fullduplex e é
composto por 4 sinais.
O SPI não permite o endereçamento.A comunicação só pode ser
feita entre 2 pontos, sendo um deles o Master e outro o Slave, a
partir de 3 vias. 56INTRODUÇÃO AO 8051
F.E.M

05/03/2012
29
CARACTERÍSTICAS SPI
Sinais de dados: MOSI (Master data Output, Slave data Input) e MISO
(Master data Input, Slave data Output) são responsáveis pela transferência de
dados entre o master e o slave.
Sinais de controle: SCLK (Serial Clock) e /SS (Slave Select).
57INTRODUÇÃO AO 8051
F.E.M
PORT P2PORT P2
PORT P2PORT P2
É utilizado como um PORT de uso geral (I/O).
Ao acessar uma memória externa, utiliza-se
esse port para formação do endereço de 16
bits (8bits do PORT P0 da parte alta mais 8
bits do PORT P2 da parte baixa ).
SINAIS VITAISSINAIS VITAIS
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
RST
(RXD) P3.0
(TXD) P3.1
(INT0) P3.2
(INT1) P3.3
(T0) P3.4
(WR) P3.6
(RD) P3.7
XTAL2
XTAL1
GND
1
2
3
4
5
6
7
8
9
10
12
11
13
14
16
17
18
15
19
20
40
39
38
37
36
35
34
33
32
31
29
30
28
27
25
24
23
26
22
21
VCCP0.0 (AD0)
P0.1 (AD1)
P0.2 (AD2)
P0.3 (AD3)
P0.4 (AD4)
P0.5 (AD5)
P0.6 (AD6)
P0.7 (AD7)
EA
ALE
PSEN
P2.7 (A15)
P2.6 (A14)
P2.5 (A13)
P2.4 (A12)
P2.3 (A11)
P2.2 (A10)
P2.1 (A9)
P2.0 (A8)
(T1) P3.5
58INTRODUÇÃO AO 8051
F.E.M

05/03/2012
30
PORT P0 JUNTO COM P2 PORT P0 JUNTO COM P2
59INTRODUÇÃO AO 8051
F.E.M
DP
LD
PH
•DPH: 8 bits que faz a parte alta do
endereço.
•DPL: 8 bits que faz a parte baixa do
endereço.
•O LATCH serve para permitir o
acesso de endereço da memória
externa.
•Quando for acessar os dados o
LATCH fica desabilitado.
•O controle é feito pelo pino LE
PORT P3PORT P3
Esse PORT tem pinos específicos de
controle e I/O.
•Pinos responsáveis pela comunicação
serial:
P3.0 (RX- recebe dados) e P3.1 (TX-
transmite dados) utilizando assim o
PROTOCOLO RS232 de comunicação.
•Pinos de Interrupção externas:
P3.2(INT0 ) e P3.3 (INT1)
•Pinos de Temporizadores externos:
P3.4(TIMER0) e P3.5(TIMER1)
Pinos de Leitura e escrita em memória
externa.
P3.6(WD) e P3.7(RD)
SINAIS VITAISSINAIS VITAIS
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
RST
(RXD) P3.0
(TXD) P3.1
(INT0) P3.2
(INT1) P3.3
(T0) P3.4
(WR) P3.6
(RD) P3.7
XTAL2
XTAL1
GND
1
2
3
4
5
6
7
8
9
10
12
11
13
14
16
17
18
15
19
20
40
39
38
37
36
35
34
33
32
31
29
30
28
27
25
24
23
26
22
21
VCCP0.0 (AD0)
P0.1 (AD1)
P0.2 (AD2)
P0.3 (AD3)
P0.4 (AD4)
P0.5 (AD5)
P0.6 (AD6)
P0.7 (AD7)
EA
ALE
PSEN
P2.7 (A15)
P2.6 (A14)
P2.5 (A13)
P2.4 (A12)
P2.3 (A11)
P2.2 (A10)
P2.1 (A9)
P2.0 (A8)
(T1) P3.5
60INTRODUÇÃO AO 8051
F.E.M

05/03/2012
31
PINOS PARA CONTROLES EXTERNOS
CONTROLE
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
RST
(RXD) P3.0
(TXD) P3.1
(INT0) P3.2
(INT1) P3.3
(T0) P3.4
(WR) P3.6
(RD) P3.7
XTAL2
XTAL1
GND
1
2
3
4
5
6
7
8
9
10
12
11
13
14
16
17
18
15
19
20
40
39
38
37
36
35
34
33
32
31
29
30
28
27
25
24
23
26
22
21
VCCP0.0 (AD0)
P0.1 (AD1)
P0.2 (AD2)
P0.3 (AD3)
P0.4 (AD4)
P0.5 (AD5)
P0.6 (AD6)
P0.7 (AD7)
EA
ALE
PSEN
P2.7 (A15)
P2.6 (A14)
P2.5 (A13)
P2.4 (A12)
P2.3 (A11)
P2.2 (A10)
P2.1 (A9)
P2.0 (A8)
(T1) P3.5
•RESET – Quando aplicado esse pulso, o
microcontrolador volta no endereço 0000h da
memória de programa reinicializando
novamente.
•ALE – (Adress Latch Enable) É o pino que
controla o acionamento do LATCH durante o
processo de acesso a memória.
•PSEN – (Program Store Enable) Pulso que
habilita leitura para uma memória externa.
•EA – External Access Enable. Pino que
determina se vai ser usado uma memória
ROM/EPROM interna ou externa.
•XTAL1 e XTAL2 – Pinos onde serão ligados
o cristal de clock.61
INTRODUÇÃO AO 8051
F.E.M
EXERCICIOS
14. Quais são as principais características funcionais dos ports
P0, P1, P2 e P3 do 8051?
15. Quais são os pinos usados para gravar programas na
memória interna de um 8051? (cite o número e o nome desses
pinos e o protocolo)
16. Qual é o protocolo de comunicação usado para gravar
programas na memória interna de um 8051?
17. Quais são os pinos usados para comunicação serial
assíncrona em um 8051? (cite o número e o nome desses pinos)
18. Qual é o nome do protocolo usado na comunicação serial
assíncrona?
19. Qual é a finalidade do pino /RESET? Desenhe o circuito típico
associado a este pino.
20. Qual é a finalidade dos pinos XTAL1 e XTAL2? Desenhe o
circuito típico associado a estes pinos. 62INTRODUÇÃO AO 8051
F.E.M