
ANALISE DA VIABILIDADE DO USO DE RPA EM INSPEC ...ANALISE DA VIABILIDADE DO USO DE RPA EM INSPEC˘AO...
94
Disserta¸c˜ ao apresentada `a Pr´ o-ReitoriadeP´os-Gradua¸c˜ ao do Instituto Tecnol´ ogico de Aeron´autica, como parte dos requisitos para obten¸c˜ ao do t´ ıtulo de Mestre em Ciˆ encias no Programa de P´ os-Gradua¸ c˜aoem Engenharia Eletrˆ onica e Computa¸c˜ ao, ´ Area de Dispositivos e Sistemas Eletrˆ onicos. Diogo de Oliveira Costa AN ´ ALISE DA VIABILIDADE DO USO DE RPA EM INSPE ¸ C ˜ AO EM VOO DO VOR Disserta¸c˜ ao aprovada em sua vers˜ ao final pelos abaixo assinados: Prof a . Dr a . Neusa Maria Franco de Oliveira Orientadora Prof. Dr. Pedro Teixeira Lacava Pr´ o-Reitor de P´ os-Gradua¸c˜ao Campo Montenegro S˜ ao Jos´ e dos Campos, SP - Brasil 2018
Transcript of ANALISE DA VIABILIDADE DO USO DE RPA EM INSPEC ...ANALISE DA VIABILIDADE DO USO DE RPA EM INSPEC˘AO...

Dissertacao apresentada a Pro-Reitoria de Pos-Graduacao do Instituto
Tecnologico de Aeronautica, como parte dos requisitos para obtencao
do tıtulo de Mestre em Ciencias no Programa de Pos-Graduacao em
Engenharia Eletronica e Computacao, Area de Dispositivos e Sistemas
Eletronicos.
Diogo de Oliveira Costa
ANALISE DA VIABILIDADE DO USO DE RPA
EM INSPECAO EM VOO DO VOR
Dissertacao aprovada em sua versao final pelos abaixo assinados:
Profa. Dra. Neusa Maria Franco de Oliveira
Orientadora
Prof. Dr. Pedro Teixeira Lacava
Pro-Reitor de Pos-Graduacao
Campo MontenegroSao Jose dos Campos, SP - Brasil
2018

Dados Internacionais de Catalogacao-na-Publicacao (CIP)Divisao de Informacao e Documentacao
Costa, Diogo de OliveiraAnalise da viabilidade do uso de RPA em inspecao em voo do VOR / Diogo de Oliveira Costa.
Sao Jose dos Campos, 2018.93f.
Dissertacao de Mestrado – Curso de Engenharia Eletronica e Computacao. Area de Dispositivose Sistemas Eletronicos – Instituto Tecnologico de Aeronautica, 2018. Orientadora: Profa. Dra.Neusa Maria Franco de Oliveira.
1. VOR. 2. Hardware In the Loop. 3. RPA. 4. Inspecao em Voo. 5. Piloto Automatico. I.Instituto Tecnologico de Aeronautica. II. Tıtulo.
REFERENCIA BIBLIOGRAFICA
COSTA, Diogo de Oliveira. Analise da viabilidade do uso de RPA em inspecaoem voo do VOR. 2018. 93f. Dissertacao de Mestrado – Instituto Tecnologico deAeronautica, Sao Jose dos Campos.
CESSAO DE DIREITOS
NOME DO AUTOR: Diogo de Oliveira CostaTITULO DO TRABALHO: Analise da viabilidade do uso de RPA em inspecao em voo doVOR.TIPO DO TRABALHO/ANO: Dissertacao / 2018
E concedida ao Instituto Tecnologico de Aeronautica permissao para reproduzir copiasdesta dissertacao e para emprestar ou vender copias somente para propositos academicose cientıficos. O autor reserva outros direitos de publicacao e nenhuma parte destadissertacao pode ser reproduzida sem a autorizacao do autor.
Diogo de Oliveira CostaQno 05 conjunto O casa 12. Ceilandia72251-015 – Brasılia–DF

ANALISE DA VIABILIDADE DO USO DE RPA
EM INSPECAO EM VOO DO VOR
Diogo de Oliveira Costa
Composicao da Banca Examinadora:
Prof. Dr. Roberto d’Amore Presidente - ITAProfa. Dra. Neusa Maria Franco de Oliveira Orientadora - ITAProf. Dr. Alison de Oliveira Moraes Membro Interno - ITAProf. Dr. Elcio Hideiti Shiguemori Membro Externo - IEAV
ITA

Dedico este trabalho a minha famılia e
aos meus amigos por sempre estarem ao
meu lado me dando apoio sempre que
preciso. E a memoria de todos que ja
passaram por esta vida e que de alguma
forma contribuıram em minha vida e que
de algum lugar ainda vigiam meus pas-
sos.
Agradecimentos
O poeta Joao Sergio Batista Correa escreveu uma frase que sintetiza este momento...
“E o que foi virou prefacio do que somos e e real o que pra nos era um sonho.” desta
forma inicio meus agradecimentos. Primeiramente, agradeco a Deus. Pois sem Ele nada
disso seria possıvel ou teria sentido. Sempre nas dificuldades e Ele que me da forcas para
poder me reerguer e enxergar uma luz no fim do tunel. E a cada dia, eu sinto que nao
vim ao mundo pra ser apenas mais um, e sim para fazer a diferenca. Quero agradecer
a minha famılia, a minha Mae, ao meu Pai e aos meus dois irmaos, que me ajudaram a
formar o terceiro Engenheiro de tres filhos, vindos de escolas publicas e de um lar com
muitas dificuldades, inclusive financeiras. Hoje sou mestre e e gracas a ajuda deles que
isso foi possıvel. Ao Gabriel, meu sobrinho recem chegado, que mesmo so por fotos me
ajuda a ter forcas pra continuar.
Aos meus amigos, que junto a minha famılia, foram ancoras nas horas difıceis. Agra-
deco a todos eles que aguentam meus defeitos, e me fazem ser uma pessoa melhor a cada
dia; Amaral, Alexandre, Jota Ka, Percy, Pierobon, Ribas, Julio, Valdenir e Victor Hugo.
Nao sao somente estes, gracas a Deus, amigos verdadeiros ao meu redor nao faltam e
todos sempre estao na minha lembranca. A todos da Radio Nova Alianca, em especial
a Priscila, a Bel e ao Pe. Manzotti, que me faziam companhia e me faziam me sentir
em casa, mesmo muito distante. Aos companheiros de servico; Bebeto, Danilo, Davi,
Henrique, Jackson, Micael e Vanderlan. E a Universidade de Brasılia por me conceder a
licenca capacitacao que possibilitou eu realizar este trabalho. Ha uma pessoa que nesses
ultimos meses vem sendo muito especial na minha vida, minha namorada Mayumi, que
tem me trazido um amparo tao sublime que nao e possıvel ser descrito em palavras.
Aos meus mestres, pois sem alguns deles nada disso teria sido possıvel. Primeiramente
a professora Suelia, minha eterna orientadora, que ha tantos anos me “suporta” e quem
tenho como uma segunda mae. A professora Neusa pelo suporte nesta empreitada. Ao
professor d’Amore, um exemplo de professor. Aos demais membros da banca pelo tempo
e pelas melhorias em meu trabalho. Aos demais que nao tiveram os nomes citados aqui,
saibam que um abraco, um sorriso, uma mao... pequenos gestos sao pra mim as maiores
provas de verdadeiras amizades.

“Eu vou procurar, sei que vou encontrar, eu vou procurar,Eu vou procurar, voce nao bota uma fe, mas eu vou atras
(Eu vou procurar e sei que vou encontrar)Da minha Formula Magica Da Paz.”
— Racionais MC’s

Resumo
A realizacao deste trabalho teve como motivacao a reducao do alto custo de missoes de
inspecao em voo do VHF Omnidirectional Range (VOR), que e uma ferramenta de auxılio
a navegacao. Estas missoes sao realizadas em territorio nacional pelo Grupo Especial de
Inspecao em Voo (GEIV) com o uso de uma aeronave de medio porte, fazendo com que
haja uma logıstica complexa e de custo elevado. Visando a reducao do custo de inspecao de
VOR, foi conduzido o estudo inicial da possibilidade de uso de Remotely-Piloted Aircraft
(RPA) nesta inspecao. Na missao de verificacao de alinhamento de uma estacao VOR e
procedida uma trajetoria circular em torno desta estacao, realizando a leitura dos sinais
emitidos por esta. Com o uso de um RPA e possıvel minimizar este raio devido ao
seu envelope de voo. O uso de um RPA tambem permite a utilizacao de um Piloto
Automatico (PA), para realizar a missao de forma padronizada, por meio de WayPoint
(WP). A fim de garantir os requisitos da norma, devem ser realizados testes no Sistema de
Posicionamento do Piloto Automatico (SPPA). A norma exige que as leituras recebidas
pelo VOR e o posicionamento da aeronave sejam gravados em voo, a norma tambem preve
a acuracia das leituras do sistema. Estes testes devem determinar a grandeza dos erros
e desvios-padrao das leituras de posicao. Os testes tambem servem para determinar o
distanciamento entre as leituras de posicao, que sao dependentes da velocidade do veıculo
e da taxa de aquisicao das amostras. Foi criado um compensador para minimizar os erros
para as leituras de posicao. Este compensador e responsavel e responsavel por receber os
dados de posicionamento do receptor do Global Positioning System (GPS), processa-los
e enviar ao SPPA. Apos a validacao dos componentes do SPPA do RPA, foi construıda
uma plataforma de testes Hardware In the Loop (HIL). O laco de controle e fechado entre
o simulador de voo X-Plane e o PA. O uso do HIL aumenta a velocidade na obtencao
de resultados e permite a validacao do conceito sem a necessidade de executar voos reais.
Foram conduzidos varios testes, incluindo os varios erros que podem influenciar um VOR.
Os testes conduzidos na HIL indicam que a inspecao VOR com RPA e possıvel e resulta
em respostas corretas quanto a aprovacao ou nao do VOR inspecionado.

Abstract
This work was motivated by reduction of the high cost of VHF Omnidirectional Range
(VOR) in-flight inspection missions which is a navigation aid tool. These missions are
carried out in national territory by the Grupo Especial de Inspecao em Voo (GEIV) with
a medium-sized aircraft use, making logistics complex and costly. In order to reduce of
VOR inspection cost, the initial study of possible use of Remotely-Piloted Aircraft (RPA)
in this inspection was conducted. In the mission of verifying a VOR station alignment,
a circular path is made around this station reading signals emitted by it. By application
of a RPA, it was possible to minimize this ray due to its flight envelope. The use of an
Auto Pilot (AP) is allowed by an RPA application, to carry out the mission in a standard
way, by waypoint (WP). In order to guarantee standard requirements, tests must be
performed on the Automatic Pilot Positioning System (APPS). The standard requires
readings received by VOR and by positioning of the aircraft (they are recorded in flight),
also it must provide the system readings accuracy. These tests shall determine the errors
magnitude and standard deviations of position readings. The tests also serve to determine
the distance between position readings that are dependent on vehicle speed and sample
acquisition rate. A compensator has been created to minimize errors for position readings
and it is responsible for receiving positioning data of the Global Positioning System (GPS)
receiver, processing it and sending it to the SPPA. After validation of the RPA SPPA
components, a hardware in the loop (HIL) test platform was constructed. The control
loop is closed between the flight simulator X-Plane and AP. The use of HIL increases
speed in achieving results and allows concept validation without to perform actual flights.
Several tests have been conducted, including the various errors that may influence a VOR.
Tests conducted at HIL indicate that VOR inspection with RPA is possible and results
in correct responses as to whether or not the inspected VOR is approved.

Lista de Figuras
FIGURA 1.1 – Exemplo de radiais de uma estacao VOR e a diferenca entre a radial
e o rumo da aeronave. . . . . . . . . . . . . . . . . . . . . . . . . . . 22
FIGURA 2.1 – Plataforma HIL generica para testes em uma controladora de piloto
automatico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
FIGURA 2.2 – Fluxo de dados do HIL, do simulador ao PA e o processamento da
missao. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
FIGURA 3.1 – Formato da rotina automatica de inspecao, com as etapas de deco-
lagem, aproximacao da trajetoria de inspecao e trajetoria de inspecao. 35
FIGURA 3.2 – Apresentacao das entradas (latvor, lonvor, lataeronave, lonaeronave) e
da saıda (θ) da Equacao 3.5. . . . . . . . . . . . . . . . . . . . . . . 37
FIGURA 3.3 – Construcao da trajetoria com pequena variacao do raio de forma a
atingir a trajetoria desejada. . . . . . . . . . . . . . . . . . . . . . . 38
FIGURA 3.4 – Construcao da trajetoria para sjc, com as rotinas de decolagem,
aproximacao e orbita de inspecao. . . . . . . . . . . . . . . . . . . . 39
FIGURA 3.5 – Construcao da trajetoria para cpn, com as rotinas de decolagem,
aproximacao e orbita de inspecao. . . . . . . . . . . . . . . . . . . . 40
FIGURA 3.6 – Visao aerea da trajetoria construıda para inspecao do VOR de SJC
(GOOGLE, 2018a). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
FIGURA 3.7 – Visao aerea da trajetoria construıda para inspecao do VOR de CPN
(GOOGLE, 2018b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
FIGURA 4.1 – Visao aerea do aeroporto de SJC (GOOGLE, 2018c) com a localizacao
dos dois pontos geodesicos usados como referencia. . . . . . . . . . . 45
FIGURA 4.2 – Nuvem de pontos, em azul, e referencia marcada no centro do cırculo
com 1m de raio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46

LISTA DE FIGURAS x
FIGURA 4.3 – Nuvem de pontos, em azul, e referencia marcada no centro do cırculo
com 1m de raio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
FIGURA 4.4 – Disposicao dos pontos para teste de referencia. . . . . . . . . . . . . 47
FIGURA 4.5 – Quatro nuvens de pontos referente as quatro pontos do experimento. 48
FIGURA 4.6 – Visao aerea (GOOGLE, 2018d) da posicao central dos quatro intervalos. 50
FIGURA 4.7 – Intervalo 1.1, retirado da trajetoria 1, mostrando em vermelho (−o−)
a aquisicao do SPPA e em preto (−x−) a do DGPS. . . . . . . . . . 51
FIGURA 4.8 – Intervalo 1.2, retirado da trajetoria 1, mostrando em vermelho (−o−)
a aquisicao do SPPA e em preto (−x−) a do DGPS. . . . . . . . . . 51
FIGURA 4.9 – Intervalo 2.1, retirado da trajetoria 2, mostrando em vermelho (−o−)
a aquisicao do SPPA e em preto (−x−) a do DGPS. . . . . . . . . . 52
FIGURA 4.10 –Intervalo 2.2, retirado da trajetoria 2, mostrando em vermelho (−o−)
a aquisicao do SPPA e em preto (−x−) a do DGPS. . . . . . . . . . 52
FIGURA 4.11 –Projecao dos valores de distancia entre as amostras para a velocidade
de 10.5m/s com o uso do SPPA. . . . . . . . . . . . . . . . . . . . . 54
FIGURA 4.12 –Projecao dos valores de distancia entre as amostras para a velocidade
de 10.5m/s com o uso do DGPS. . . . . . . . . . . . . . . . . . . . . 55
FIGURA 4.13 –Grafico da distancia entre as amostras em funcao da velocidade. . . 55
FIGURA 5.1 – Fluxograma do sistema completo, onde se pode ver onde e inserido
o compensador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
FIGURA 5.2 – Fluxograma do codigo de leitura e correcao das leituras do GPS. . . 62
FIGURA 5.3 – Tomada de dados 1, onde a aquisicao foi realizada a 20m de distancia
do ponto 2 da Tabela 4.1, marcado com + no centro do cırculo. . . . 65
FIGURA 5.4 – Tomada de dados 2, onde a aquisicao foi realizada a 25m de distancia
do ponto 2 da Tabela 4.1, marcado com + no centro do cırculo. . . . 65
FIGURA 6.1 – Regioes de interesse da analise do VOR, largura, centro, limite da
radial e regiao de decisao. . . . . . . . . . . . . . . . . . . . . . . . . 68
FIGURA 6.2 – Maior erro em funcao do raio da trajetoria. Notasse um decresci-
mento do valor do erro ate o raio mınimo calculado e uma baixa
variacao apos este valor. . . . . . . . . . . . . . . . . . . . . . . . . 73
FIGURA 6.3 – Erro medio em funcao do raio da trajetoria. Notasse uma baixa
variacao apos o raio mınimo calculado. . . . . . . . . . . . . . . . . 73
LISTA DE FIGURAS xi
FIGURA 6.4 – Erro maximo em funcao no numero de voltas. Pode-se notar o de-
crescimento ate a terceira volta e uma pouca variacao apos ela, por
isso para o melhor custo-benefıcio esse sera o numero de voltas es-
colhido. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
FIGURA 6.5 – Erro medio em funcao no numero de voltas. De forma semelhante ao
erro maximo, o melhor custo-benefıcio esta proximo a quarta volta,
corroborando a escolha dela. . . . . . . . . . . . . . . . . . . . . . . 75
FIGURA 6.6 – Fluxograma do codigo de processamento da missao. Este bloco esta
contido no HIL mostrado na Fig. 2.2 . . . . . . . . . . . . . . . . . 76
FIGURA 6.7 – Exemplos de erros de modulacao, que mostram o formato dos erros
inseridos nas leituras do VOR, para uma radial especıfica. . . . . . . 77
FIGURA 6.8 – Exemplo de sobreposicao dos erros de modulacao, onde e visto a
extrapolacao do erro maximo, mesmo sendo os dois erros conformes
a norma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
FIGURA 6.9 – Erros de modulacao inseridos em torno da radial 90. E possıvel
ver a linearidade das leituras fora da regiao onde foi inserido os
erros, Figura (a). Na Figura (b) e visualizada apenas a regiao onde
foi inserido os erros de modulacao, e possıvel ver as alteracoes nos
valores lidos, que causariam embaralhamento no sinal. . . . . . . . . 79
FIGURA 6.10 –Trajetoria completa sem a insercao de erros no sistema de posicio-
namento e nas leituras de VOR. . . . . . . . . . . . . . . . . . . . . 80
FIGURA 6.11 –Regiao onde se encontra a radial de maior erro, para a trajetoria de
referencia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
FIGURA 6.12 –Radial de maior erro onde e possıvel ver o agrupamento dos pontos
aquisitados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
FIGURA 6.13 –Radial de maior erro onde e possıvel ver o espalhamento dos pontos
aquisitados, causado pela insercao de um erro aleatorio no sistema
de posicionamento. . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
FIGURA 6.14 –Regiao da radial de maior erro e radiais vizinhas, com os pontos
amostrados relativos a cada radial, utilizando o erro de posiciona-
mento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
FIGURA 6.15 –Radial de maior erro, utilizando os erros de posicionamento e de
desalinhamento da estacao VOR. . . . . . . . . . . . . . . . . . . . . 83

LISTA DE FIGURAS xii
FIGURA 6.16 –Trajetoria com insercao de erros de posicionamento e de modulacao
na estacao VOR. E possıvel ver que, devido ao erro de modulacao, o
sinal referente a radial 104 e recebido em regioes diferentes, fazendo
com que a media seja deslocada da referencia. . . . . . . . . . . . . 84
FIGURA 6.17 –Trajetoria com insercao de erros no sistema de posicionamento, de
modulacao e de desalinhamento na estacao VOR. E possıvel ver que,
devido ao erro de modulacao, o sinal referente a radial 104 e recebido
em regioes diferentes, fazendo com que a media seja deslocada da
referencia. Tambem e possıvel notar o desalinhamento, 4◦, inserido. 85

Lista de Tabelas
TABELA 3.1 – Formatacao dos parametros para compor o WP para enviar ao Ar-
dupilot pelo protocolo MavLink . . . . . . . . . . . . . . . . . . . . 35
TABELA 3.2 – Exemplo insercao de WP. . . . . . . . . . . . . . . . . . . . . . . . . 36
TABELA 4.1 – Coordenadas geodesicas dos dois pontos de referencia utilizados nos
testes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
TABELA 4.2 – Valor dos erros e desvios-padrao dos dois pontos em (m). . . . . . . 45
TABELA 4.3 – Distancias entre os pontos medios e o centro cırculo, com seus desvios-
padrao. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
TABELA 4.4 – Comparacao entre os equipamentos de DGPS e de GPS. . . . . . . . 49
TABELA 4.5 – Distancia entre as amostras para a velocidade atual e projecao para
a velocidade de cruzeiro de 10.5m/s utilizando o SPPA. . . . . . . . 53
TABELA 4.6 – Distancia entre as amostras para a velocidade atual e projecao para
a velocidade de cruzeiro de 10.5m/s utilizando o DGPS. . . . . . . . 54
TABELA 4.7 – Erros, medio e maximo para a latitude e longitude medidos em graus
(◦). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
TABELA 4.8 – Comparacao entre os valores de tendencia medio obtidos com uso
dos dois tipos de referencia, marcos geodesicos ou DGPS . . . . . . 57
TABELA 4.9 – Comparacao do erro de tendencia entre os dois modos de correcoes
propostos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
TABELA 5.1 – Formato do pacote de dados enviados pelo GPS . . . . . . . . . . . 63
TABELA 5.2 – Valor dos erros e desvios-padrao da media, para latitude e longitude,
das duas tomadas de dados em (◦). . . . . . . . . . . . . . . . . . . 66
TABELA 5.3 – Valor dos erros e desvios-padrao das duas tomadas de dados em (m). 66

LISTA DE TABELAS xiv
TABELA 6.1 – Erro de desalinhamento do VOR em funcao do raio da trajetoria . . 72
TABELA 6.2 – Erro de desalinhamento do VOR em funcao do numero de voltas
para o raio de 926m (0.5NM) . . . . . . . . . . . . . . . . . . . . . 74
TABELA 6.3 – Apresentacao dos erros inseridos no sistema para cada um dos testes. 76
TABELA 6.4 – Saıda do codigo com os valores para a radial com o maior erro. Em
cada teste foi inserido um modelo de erro no sistema, como mostrado
na Tabela 6.3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
TABELA 6.5 – Saıda do codigo indicando para possıveis erros de modulacao detec-
tados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Lista de Abreviaturas e Siglas
AL Aeronave-laboratorio
AP ArduPilot
CPN Campinas - SP
DGPS Differential Global Positioning System
FAA Federal Aviation Administration
GEIV Grupo Especial de Inspecao em Voo
GPS Global Positioning System
HIL Hardware In the Loop
ICAO International Civil Aviation Organization
INS Inertial Navigation System
IPEV Instituto de pesquisas e Ensaios em Voo
PA Piloto Automatico
PC Personal Computer
RC Radio Controle
RPA Remotely-Piloted Aircraft
SJC Sao Jose dos Campos - SP
SP Sao Paulo
SPPA Sistema de Posicionamento do Piloto Automatico
VOR VHF Omnidirectional Range
WP WayPoints

Lista de Sımbolos
R Raio da trajetoria
V el Velocidade de cruzeiro da aeronave
taxa Taxa de aquisicao do GPS
∆ r Acuracia esperada
∆S Distancia para o proximo WP
ϕ Angulo entre os WP
δmag Declinacao magnetica local
∆h Diferenca de altitude entre os WP
numeroWP Numero de WP’s do procedimento
∆Saprox Distancia entre os WP na rotina de aproximacao
∆SV OR Distancia entre a aeronave e s estacao VOR
θ Angulo azimutal
latvor Latitude da estacao VOR
lonvor Longitude da estacao VOR
lataeronave Latitude da aeronave
lonaeronave Longitude da aeronave
∆r Variacao no raio da trajetoria
σ Desvio-padrao
σm Desvio-padrao da media
δx Distancia entre amostras de posicao
V Velocidade
Vm Velocidade media
δxatual Distancia entre amostras de posicao atual
δxfuturo Distancia entre amostras de posicao atual futura
Vatual Velocidade atual
Vfuturo Velocidade futura
w Largura da radial
π Constante PI
rgn Regiao de decisao
θmodelado Valor referencia da leitura do VOR em funcao da posicao do receptor

LISTA DE SIMBOLOS xvii
θlido Valor VOR recebido pela aeronave
εmax Erro maximo
εmedio Erro medio

Sumario
1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.1 Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.2 Proposta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.2.1 Automatizacao da missao . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.2.2 Sistema de Posicionamento do Piloto Automatico (SPPA) . . . . . . . 24
1.2.3 Compensador de Erros de Posicionamento . . . . . . . . . . . . . . . 24
1.2.4 Hardware In the Loop (HIL) . . . . . . . . . . . . . . . . . . . . . . . 25
1.3 Organizacao do trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2 Inspecao em voo de VOR e HIL . . . . . . . . . . . . . . . . . 27
2.1 Inspecao convencional de VOR . . . . . . . . . . . . . . . . . . . . . . 27
2.2 Inspecao de VOR com RPA - Plataforma HIL . . . . . . . . . . . . 28
2.2.1 Hardware In the Loop . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2.2 Hardware In the Loop implementado . . . . . . . . . . . . . . . . . . 29
2.2.3 Simulador de Voo - X-plane . . . . . . . . . . . . . . . . . . . . . . . 31
3 Automatizacao da missao . . . . . . . . . . . . . . . . . . . . . . 32
3.1 Aerotronica para inspecao de VOR . . . . . . . . . . . . . . . . . . . 32
3.2 Trajetorias para inspecao de VOR . . . . . . . . . . . . . . . . . . . . 33
3.2.1 Definicao das trajetorias . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.2.2 Criacao das trajetorias . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4 Sistema de posicionamento . . . . . . . . . . . . . . . . . . . . . 43
4.1 Ensaios para o sistema de posicionamento . . . . . . . . . . . . . . . 44

SUMARIO xix
4.1.1 Ensaios estaticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.1.2 Ensaio dinamico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.1.3 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5 Correcao do GPS - Tereza . . . . . . . . . . . . . . . . . . . . 59
5.1 Sistema completo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.2 Compensador - Tereza . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.3 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6 VOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.1 Normatizacao e conceito do estudo . . . . . . . . . . . . . . . . . . . 67
6.1.1 Calculos dos erros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.2 Erros em funcao da missao . . . . . . . . . . . . . . . . . . . . . . . . 71
6.2.1 Erro de desalinhamento do VOR em funcao do raio . . . . . . . . . . 72
6.2.2 Erro em funcao do numero de voltas . . . . . . . . . . . . . . . . . . 73
6.3 Verificacao VOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6.3.1 Erro de modulacao no sinal do VOR . . . . . . . . . . . . . . . . . . 77
6.3.2 Teste 1 - Missao de referencia . . . . . . . . . . . . . . . . . . . . . . 78
6.3.3 Teste 2 - Missao com insercao de erro no sistema de posicionamento . 78
6.3.4 Teste 3 - Missao com insercao de erro no sistema de posicionamento
e desalinhamento da estacao VOR . . . . . . . . . . . . . . . . . . . . 80
6.3.5 Teste 4 - Missao com insercao de erros no sistema de posicionamento
e erro de modulacao no sinal do VOR . . . . . . . . . . . . . . . . . . 80
6.3.6 Teste 5 - Missao com insercao de erros no sistema de posicionamento,
desalinhamento da estacao VOR e erro de modulacao no sinal do VOR 83
6.3.7 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
7 Conclusao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
7.1 Trabalhos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90

1 Introducao
O sistema de transportes aereos possui alguns equipamentos de radio, facilitadores
que possibilitam a navegacao em baixas condicoes visuais, como chuva e voos noturnos
(BARRADO et al., 2013). Estes auxılios a navegacao (do ingles Navigation Aid(NavAid)),
estes equipamentos sao capazes de fornecer aos pilotos condicoes mınimas necessarias para
o auxılio na pilotagem da aeronave.
Os NavAid’s devem passar por inspecoes periodicas para garantir a sua calibracao
e a seguranca do sistema aereo. A International Civil Aviation Organization (ICAO)
especifica o tempo entre as inspecoes, acuracia, como devem ser realizadas essas inspecoes,
entre outros fatores inerentes as inspecoes (ICAO, 2000).
A verificacao dos NavAid’s deve ser realizada com frequencia, sendo que alguns do
NavAid’s devem ser inspecionados duas vezes ao ano (ICAO, 2000). A necessidade de
frequente repeticao dos ensaios faz com que o custo da verificacao seja elevado, desper-
tando assim o interesse de buscar novas possibilidades da realizacao dessas missoes, que
tenham desempenho conforme as normas vigentes. O alto custo tambem esta ligado a
uma complexa estrutura envolvida na missao, como equipe tecnica e equipamentos, que
torna o custo de cada verificacao muito alto (NOVAK; KEVICKY, 2010). Outro dificultador
para as inspecoes em voo e o fato de ser utilizado uma aeronave que deve estar no espaco
aereo segregado, isso faz com que a aeronave entre na fila de prioridades de voo do aero-
dromo, fazendo com que em aerodromos de grande movimentacao, o tempo da inspecao
seja aumentado, aumentando assim tambem os custos da operacao.
Buscando diminuir a quantidade de humanos envolvidos na missao e a diminuicao dos
custos, a automacao da missao se torna uma possibilidade real (PARASURAMAN; RILEY,
1997). Desta forma, tambem possibilita a descentralizacao das inspecoes em subequipes
espalhadas pelo territorio nacional, levando em consideracao o menor custo de operacao.
A melhoria dos recursos tecnologicos e a popularizacao das aeronaves remotamente
pilotadas (do ingles Remotely-Piloted Aircraft (RPA)) possibilita a realizacao de missoes
com certo nıvel de complexidade. As melhorias nos sistemas de Piloto Automatico (PA)
comerciais possibilitou a criacao de trajetorias mais complexas com pontos de passagem
(do ingles WayPoints (WP)), diferentemente dos sistemas mais antigos que necessitavam

CAPITULO 1. INTRODUCAO 21
de outros tipos de abordagem (SANTAMARIA et al., 2009).
O uso de rotinas automaticas, por diminuir a influencia humana, faz com que as missoes
executadas por elas mantenham um padrao. Devido a isto, o uso de RPA (AERONAUTICA,
2016) com sistema de PA se torna uma boa possibilidade para executar este tipo de tarefa
(BARRADO et al., 2013). Isto faz com que o uso de RPA’s, executando missoes criadas de
forma automatica, seja um bom candidato para auxiliar nas inspecoes em voo, diminuindo
o numero de pessoas envolvidas, assim diminuindo os riscos associados a eles (WEDE,
2006).
Dentre os diversos NavAid’s, o VHF Omnidirectional Range (VOR), com frequencia
de operacao entre 108.0 ate 117.5 MHz (YOUNG; WELLS, 2014), e aquele capaz de for-
necer a referencia ao norte que a aeronave esta em relacao a uma estacao sintonizada
(NAVIGATION. . . , 2016). Essa referencia e dada por raias formadas pelos angulos em sen-
tido horario comecando a partir do Norte. A Figura 1.1 mostra duas aeronaves e uma
estacao VOR. A aeronave 1 esta situada na radial 315 e a aeronave 2 na radial 90, ambas
em relacao a estacao VOR. A Figura 1.1 tambem mostra que o rumo da aeronave nao
necessariamente coincide sobre a radial, a aeronave 1 esta com um rumo de 45 ◦ enquanto
esta sobre a radial 315, ja no caso a aeronave 2 coincide o seu rumo com a radial.
Estas raias funcionam como vias para as aeronaves, que quanto mais proximas da
estacao mais veraz sera a sua informacao de rumo. Quando ha o distanciamento da
estacao ha uma degeneracao devido ao aumento da distancia entre duas raias, portanto
apos uma certa distancia o piloto deve trocar a estacao VOR sintonizada para proceder
para o rumo correto. Esta distancia varia dependendo da topologia implementada em
cada estacao VOR(YOUNG; WELLS, 2014).

CAPITULO 1. INTRODUCAO 22
Norte magnético(N)
N
N
Radial atravessada pela aeronave(90)
Radial atravessada pela aeronave(315)
Ângulo da radial
Rumo da aeronave(45)
Rumo da aeronave(90)
VOR
Aeronave 1
Aeronave 2
Ângulo da radial
FIGURA 1.1 – Exemplo de radiais de uma estacao VOR e a diferenca entre a radial e orumo da aeronave.
Para este trabalho foi escolhida uma aeronave de asa fixa, com modelo semelhante a
aeronave na qual o sistema sera embarcado. O uso de um RPA para ensaios em voo do
VOR deve levar em consideracao a problematica da autonomia de voo da aeronave. Este
requisito e necessario para garantir a execucao e seguranca da missao. Em nosso estudo,
a questao da autonomia do RPA nao foi considerada.
1.1 Objetivo
O objetivo deste trabalho e verificar a viabilidade da realizacao de inspecoes de estacoes
VOR com o auxılio de um RPA de asa fixa. Para isto, neste trabalho, sao empregadas
ferramentas de testes em bancada do tipo Hardware In the Loop (HIL), a fim de determinar
se os requisitos previstos em norma podem ser satisfeitos.
Para a realizacao deste objetivo, o trabalho sera desenvolvido em algumas etapas:
• Automatizacao da missao: A automatizacao parte da criacao da trajetoria a partir
de um codigo computacional que seja capaz de gerar os WP que devem ser seguidos
pelo RPA;
• Escolha do piloto automatico: O Piloto Automatico (PA) embarcado no RPA deve
ser capaz de seguir os WP, desta forma o Sistema de Posicionamento do Piloto
Automatico (SPPA) deve ser preciso o suficiente para tal. O SPPA tambem sera
responsavel por fornecer ao sistema de armazenamento a localizacao do RPA durante

CAPITULO 1. INTRODUCAO 23
a missao, a fim de comparar os valores recebidos do analisador de sinal do VOR com
os valores de referencia. O PA escolhido e um dispositivo de prateleira, de rapida
adaptacao;
• Testes em campo do Sistema de posicionamento: Serao executados testes de preci-
sao e acuracia do SPPA. Isto e feito para se ter seguranca de que as informacoes
fornecidas por este podem ser utilizadas para a verificacao do atendimento as nor-
mas;
• Testes em bancada: A criacao de ferramentas capazes de simular os resultados de
da inspecao em voo;
• Tratamento dos dados: A criacao de um codigo a fim de interpretar os valores
armazenados pelo simulador de voo, de forma a verificar o alinhamento do VOR
simulado;
• Validacao do sistema: Apos estas etapas serao apresentados os valores obtidos em
simulacao e comparados com o que esta descrito em norma.
1.2 Proposta
Na atualidade, em territorio brasileiro, e utilizada uma aeronave executiva de medio
porte, onde e embarcado o sistema de radio-analise (FAB, 2017). A proposta e verificar a
viabilidade de realizar a inspecao em voo de uma estacao VOR com o auxılio de um RPA,
que tem o custo de operacao muito inferior a aeronave usada na atualidade (QVIST, 2016)
(ALCANTARA et al., 2008) (SANTAMARIA et al., 2009).
Como primeira alteracao na trajetoria executada para a missao de inspecao em voo,
devido ao uso de um RPA, temos a mudanca do raio da trajetoria da aeronave, uma vez
que a dinamica da aeronave permite curvas mais acentuadas. Assim, e possıvel realizar
uma missao com um raio significativamente menor (ALCANTARA et al., 2008). Diminuir
o raio da trajetoria tambem viabiliza executar mais de uma volta em torno do VOR, na
mesma inspecao. Deste modo, desse modo e possıvel determinar um modelo estatıstico
para atingir a acuracia prevista na norma. O uso de RPA possibilita a automatizacao da
missao, visando a padronizacao na execucao das inspecoes em voo. O uso de um RPA
possui a vantagem de viabilizar o voo a baixo dos 400 pes de altitude, aproximadamente
120 m, regiao conhecida como espaco aereo nao segregado onde, para RPA’s abaixo dos
25 Kg, as exigencias quanto a autorizacao de voo sao menores (AERONAUTICA, 2016).

CAPITULO 1. INTRODUCAO 24
1.2.1 Automatizacao da missao
Para automatizar a missao sera desenvolvido um codigo capaz de gerar os WP a partir
de pontos referentes ao local de decolagem, local do VOR e rumo da decolagem. O codigo
e capaz de adequar a missao de acordo com os parametros inseridos, desta forma ele
proporcionara um ganho de custos devido ao tempo envolvido nessa etapa.
A criacao automatica da missao proporciona tambem a execucao padronizada entre
as diversas estacoes VOR existentes. Esta automatizacao auxilia a criacao de trajetorias
em aerodromos diferentes, fazendo com que, independentemente do local da inspecao, a
missao seja executada seguindo o mesmo padrao. Desta forma e possıvel, mesmo com
pessoas com diferentes nıveis de treinamento, executar a missao de forma padronizada.
1.2.2 Sistema de Posicionamento do Piloto Automatico (SPPA)
O sistema de posicionamento deve ser capaz de fornecer ao controlador do PA a posicao
da aeronave, com precisao e taxa de amostragem suficientes para alcancar os WP e manter
a trajetoria.
Alem de fornecer a posicao da aeronave, de acordo com a norma (ICAO, 2000), para
a inspecao do VOR o sistema de armazenamento de dados, utilizado na missao, deve
ser capaz de gravar em arquivo o posicionamento em conjunto com o sinal recebido do
VOR. Tambem segundo a norma, a aquisicao do sinal do VOR deve ter uma acuracia de
0.6 ◦. Esta acuracia esta ligada diretamente ao sistema de recebimento do sinal VOR,
mas tambem ao sistema de posicionamento pois, ele deve fornecer a posicao com acuracia
suficiente para que a observancia da norma seja comprovada.
Para isso, serao executados testes de validacao do sistema de posicionamento, a fim de
garantir a adequacao a norma. Serao executados testes estaticos para quantizacao de erros
de tendencia, esperados em sistemas de Global Positioning System (GPS) (DEAR; MIT-
CHELL, 2006), e experimentos dinamicos com auxılio de equipamentos capazes de fornecer
referencia para comparacao. Apos isso e possıvel gerar o modelo do erro instrumental do
sistema de posicionamento para posterior tratamento.
1.2.3 Compensador de Erros de Posicionamento
Como proposta para a correcao do erro de tendencia, sera criado um sistema de pre-
processamento para tratar o sinal vindo do GPS e retirar esse erro medio de tendencia,
esse compensador e batizado como Tereza. Para isto, foi criado no codigo embarcado duas
etapas, uma de inicializacao e uma de execucao:
CAPITULO 1. INTRODUCAO 25
• Inicializacao: Na rotina de inicializacao o sistema sera colocado em um local com
as coordenadas geodesicas conhecidas e deixado por um determinado tempo, pre
determinado em 5min, desta forma sera determinado o erro medio tanto para a
latitude quanto para a longitude;
• Execucao: Apos o sistema determinar os erros medios, ele entrara em um laco
infinito de execucao, este laco recebe o valor de posicao do GPS e corrige o valor a
partir dos dados obtidos na etapa anterior.
Apos essa correcao ainda existira na saıda processado do GPS um erro aleatorio, ligado
a fatores externos e e esperado ainda um erro de tendencia de ordem inferior ao inicial.
1.2.4 Hardware In the Loop (HIL)
Para execucao de testes preliminares foi construıdo um ferramental de HIL. Esse ferra-
mental e capaz de realizar a troca de dados com o simulador de voo a fim de verificar todas
as etapas do projeto, desde a controle da aeronave, execucao dos WP, ate o recebimento
dos valores do VOR.
Apos a execucao da missao e realizada uma etapa de tratamento de dados. Nesta
etapa os valores armazenados pelo simulador sao levados a um codigo onde e realizada a
analise do alinhamento das radiais do VOR simulado. Para isso, sao inseridos os mesmos
erros aleatorios quantificados nas etapas de testes do sistema de posicionamento, tendo
em vista que o simulador possui um GPS ideal, sem erros. Esta adicao de erros faz com
que o sistema tenha comportamento mais aproximado as situacoes reais.
Estes testes em bancada tambem servem para a validacao do sistema, sem a neces-
sidade, preliminar, de realizar testes em campo, que possuem um custo elevado, envolve
diversas pessoas e depende da paralisacao, mesmo que por pouco tempo, do espaco aereo
sobre o aerodromo (LU; GENG, 2011) (BITTAR et al., 2014) (SANTAMARIA et al., 2009).
1.3 Organizacao do trabalho
• Capıtulo 1: Apresenta a parte introdutoria, com a apresentacao da problematica,
objetivo e a proposta do trabalho.
• Capıtulo 2: Apresenta o estado da arte e a implementacao do Hardware In the Loop.
• Capıtulo 3: Apresenta o RPA, com o sistema de posicionamento e a definicoes e
automatizacao da missao.

CAPITULO 1. INTRODUCAO 26
• Capıtulo 4: Apresenta o sistema de posicionamento e os testes realizados para veri-
ficar a adequacao do sistema quanto a norma.
• Capıtulo 5: Apresenta o sistema criado para corrigir os erros de posicionamento do
SPPA.
• Capıtulo 6: Apresenta como e realizado a verificacao do alinhamento do VOR, a
determinacao dos parametros da missao e os testes para validacao do sistema.
• Capıtulo 7: Apresenta as conclusoes do trabalho e as propostas para trabalhos
futuros.
2 Inspecao em voo de VOR e HIL
Para a realizacao da inspecao em voo, na atualidade, e utilizada uma aeronave de
medio porte, que exige uma complexa operacao (FAB, 2017). Esta operacao necessita de
uma equipe que envolve varias pessoas, contando com a equipe de pilotos, tecnicos espe-
cializados na inspecao e outras varias pessoas envolvidas para a manutencao da aeronave
e do espaco aereo.
Devido a toda esta estrutura envolvida, o custo destas missoes e elevado. Desta forma
o desenvolvimento de estudos que possibilitem diminuir estes custos e a quantidade de
pessoas envolvidas sao muito importantes (LU; GENG, 2011) (BITTAR et al., 2014).
Para desenvolver um projeto de novas formas de realizacao de missoes, diversas etapas
devem ser seguidas, a fim de validar os resultados obtidos e adequa-los as normas. Para a
validacao da missao sao realizados testes laboratoriais, testes nos componentes do sistema
e por fim o sistema e embarcado na aeronave para a realizacao de testes em voo.
2.1 Inspecao convencional de VOR
A inspecao em territorio brasileiro e realizada pelo Grupo Especial de Inspecao em
Voo (GEIV). A inspecao do VOR feita pelo GEIV e realizada com o uso da Aeronave-
laboratorio (AL) IU-50. Esta AL e um Embraer Legacy 500 onde esta embarcado um sis-
tema de posicionamento de alta precisao, juntamente com equipamentos de radio-analise,
entre outros aparelhos que permitem realizar os ensaios (FAB, 2017).
A inspecao de uma estacao VOR possui duas etapas descritas na norma, uma em
terra e uma em voo. A etapa de solo basicamente e responsavel por verificar a geracao da
modulacao, e por estudar os parametros de portadora, fase, desvio de banda, entre outros
parametros (MCKEEL; CRAYMER, 1965). A inspecao em voo verifica o alinhamento entre
o sinal recebido do VOR e referencia calculada a partir da posicao geodesica do receptor
e oscilacoes nos sinais recebidos. Estas oscilacoes sao os erros de curvatura, rugosidade e,
falha de sinal (do ingles bend, roughness e, scalloping), e ocorrem devido a agentes geo-
graficos, construcoes e interferencias eletromagneticas (GREVING; SPOHNHEIMER, 2010).
CAPITULO 2. INSPECAO EM VOO DE VOR E HIL 28
Neste estudo sera abordado somente o erro de desalinhamento. O erro de alinhamento da
estacao, para estar dentro dos padroes da norma, nao deve exceder 2◦ (AERONAUTICA,
2017).
A inspecao em voo, para verificar o alinhamento, deve ser realizada orbitando a es-
tacao a ser analisada, com procedimentos, raio da orbita e altitude descritos em norma
(AERONAUTICA, 2017). Desta forma, a orbita, deve ser realizada, preferencialmente, em
sentido anti-horario com a distancia fixa, com valor definido entre 5NM (9260m) e 20NM
(37040m). A altitude da trajetoria deve ser calculada a partir do raio escolhido e o angulo
(α) acima da estacao, conforme a Equacao 2.1, e este α deve estar entre 4◦ e 6◦.
altitude = raio · tan(α) (2.1)
Para a realizacao da missao devem ser levados em consideracao os parametros da
aeronave. Parametros como a velocidade da aeronave e o raio de curvatura mınimo in-
fluenciam na escolha do sistema de posicionamento. O sistema de posicionamento deve
levar em consideracao a taxa de amostras necessaria, para garantir a acuracia prevista em
norma (ICAO, 2000).
2.2 Inspecao de VOR com RPA - Plataforma HIL
Considerando-se as normas estabelecidas e a possibilidade de se reduzir custos com o
uso de RPA’s para inspecao de VOR, o estudo das caracterısticas e parametros do sistema
a ser implementado foram desenvolvidos. Desta forma, o uso de um RPA, que possibilita
voos mais lentos do que uma aeronave de medio porte, possibilita a diminuicao do raio da
missao e a utilizacao de um sistema de geo-posicionamento com uma taxa de amostragem
menor, de modo a viabilizar o uso de um sistema de baixo custo. Para a determinacao da
taxa mınima deve-se considerar o raio da trajetoria da missao e a velocidade da aeronave.
Por exemplo, considere o uso de um sistema de posicionamento com a taxa de aquisi-
cao de 1Hz na AL, com velocidade de cruzeiro de 0.8mach (≈ 270m/s) (DECEA, 2016), e
em um RPA, com velocidade de cruzeiro de 10m/s. Com esta mesma taxa de aquisicao,
a AL faz a aquisicao de posicao a cada 270m, ja no caso do RPA faz com que a aquisicao
sera realizada a cada 10m. Estes valores mostram que, com o mesmo sistema de posicio-
namento, o caso onde foi realizado pelo RPA pode ter uma acuracia maior devido a sua
velocidade.
A modificacao da aeronave utilizada para a inspecao do VOR, permite que sejam
criados subgrupos, aumentando a autonomia dos aerodromos e otimizando os custos de
operacao. Isto ocorre pela automatizacao da operacao do RPA, fazendo com que haja a

CAPITULO 2. INSPECAO EM VOO DE VOR E HIL 29
diminuicao do nıvel de especializacao dos operadores. Desta forma, o GEIV podera ser
somente requisitado para a validacao final da inspecao, para dar o aval final da inspecao.
Para este trabalho foi escolhida uma aeronave com dimensoes proximas as da aeronave
onde serao realizados os testes em voo. Foi escolhida uma aeronave nativa do pacote do X-
plane 10. Dados como a autonomia de voo da aeronave devem ser levados em consideracao,
a fim de garantir que a aeronave e capaz de proceder na missao completa e com seguranca.
2.2.1 Hardware In the Loop
Para realizar voos de teste sobre a inspecao do VOR surge a demanda de uma pa-
ralisacao, mesmo que durante um curto intervalo de tempo, do espaco aereo sobre um
aerodromo (SANTAMARIA et al., 2009). Este fato faz com que testes preliminares, feitos
em laboratorio, sejam amplamente buscados de forma a diminuir o impacto no espaco
aereo segregado. O HIL e uma ferramenta utilizada para realizar testes laboratoriais, em
experimentos muitas vezes caros e que demandam uma grande quantidade, de materiais
e pessoas envolvidas (LU; GENG, 2011) (BITTAR et al., 2014).
Uma plataforma HIL consiste em unir o hardware em teste com outro aparato, de modo
a emular condicoes proximas de um caso real. Para criacao de um HIL para testes de
um piloto automatico de uma aeronave, devem ser fornecidas a controladora dados como
posicao, atitude da aeronave, entre outros. Para fechar o laco de controle, a controladora
por sua vez deve fornecer os valores referentes as superfıcies de deflexao. Desta forma, o
sistema que simula a aeronave calcula os novos dados a serem enviados a controladora. A
Fig. 2.1 mostra o fluxo de dados entre um simulador generico e uma controladora de piloto
automatico. No mercado ha diversos modelos de controladoras de piloto automatico, onde
o projetista deve procurar a que melhor se adeque a sua necessidade (KUROSWISKI, 2017).
Controladora (PA)
Simulador de voo
Leituras dos sensores e posição
Superfícies de deflexão
FIGURA 2.1 – Plataforma HIL generica para testes em uma controladora de piloto auto-matico.
2.2.2 Hardware In the Loop implementado
Para realizar voos de teste sobre a inspecao do VOR surge a demanda de uma pa-
ralisacao, mesmo que durante um curto intervalo de tempo, do espaco aereo sobre um

CAPITULO 2. INSPECAO EM VOO DE VOR E HIL 30
aerodromo (SANTAMARIA et al., 2009). Este fato faz com que testes preliminares, feitos
em laboratorio, sejam amplamente buscados de forma a diminuir o impacto no espaco
aereo segregado. O HIL e uma ferramenta utilizada para realizar testes laboratoriais, em
experimentos muitas vezes caros e que demandam uma grande quantidade, de materiais
e pessoas envolvidas (LU; GENG, 2011) (BITTAR et al., 2014).
A plataforma utilizada para embarcar o PA e uma plataforma comercial de codigo
aberto conhecida como ArduPilot(AP). O AP possui codigos, em sua base de dados, para
alguns diferentes tipos de veıculos como asa-fixa e asas-rotativas. Estes codigos possuem
as predefinicoes tıpicas para cada veıculo, bastando realizar o refinamento dos parametros
de configuracao para o veıculo embarcado. Esta plataforma possui os sensores para o voo
como barometro, acelerometros, girometros, entre outros. Nela toda a lei de controle e
embarcada e vem com predefinicoes que facilitam realizar os ajustes finos para atingir a
estabilidade pretendida. Esta plataforma tambem permite o uso do modo PA que e capaz
de seguir WP’s, que podem ser inseridos por um software livre como o Mission Planner.
Neste planejador de missao e possıvel fechar o laco de controle com simuladores de voo
como o X-plane 10 e o Flight Gear, ou seja, e possıvel controlar uma aeronave simulada
a partir do AP.
O HIL implementado, integrando o AP, hardware do PA comercial, e o simulador de
voo, possibilita tanto o controle feito por Radio Controle(RC) quanto pelo PA embarcado.
Nesta configuracao, todos os sensores sao ignorados e as informacoes referentes a eles sao
enviadas pelo simulador para fechar o laco de controle. Desta forma, os valores recebidos
pelo AP sao ideais, o que torna o sistema ideal para realizar testes de conceito.
Na Figura 2.2 e visto o fluxo de informacoes do HIL, com o subsistema executado
em um computador (do ingles Personal Computer (PC)) e o subsistema do AP. No PC
esta sendo executado o X-Plane, simulador de voo que fornece a atitude e a posicao da
aeronave para o Mission Planner. Este, basicamente, converte os dados entre o simulador
e o AP. No AP esta sendo executado o PA, onde estao registrados os WP’s, e, utilizando as
informacoes de posicao e atitude recebidas do X-Plane, sao feitos os calculos das deflexoes
das superfıcies e enviadas de volta para o simulador por meio do Mission Planner fechando
o HIL. O data logger armazena os dados de posicionamento e leituras do VOR, fornecidas
pelo simulador de voo, adquiridos durante a execucao da missao para analise posterior.

CAPITULO 2. INSPECAO EM VOO DE VOR E HIL 31
Mission
PlannerX-plane
Data Logger
Ardupilot
(Lat, Long, Alt, VOR)
PC
Processamento(Lat, Long, Alt, VOR)
(Lat, Long, Alt, �,�,�)
(Ail, Rudd, Ele, Thr)UDP
(Lat, Long, Alt, �,�,�)
(Ail, Rudd, Ele, Thr)USB
TelaErros
FIGURA 2.2 – Fluxo de dados do HIL, do simulador ao PA e o processamento da missao.
2.2.3 Simulador de Voo - X-plane
O X-Plane e um simulador de voo desenvolvido pela empresa Laminar, certificavel
pela Federal Aviation Administration (FAA), que e o orgao responsavel pelo sistema aereo
estadunidense, para treinamento de pilotos, devido a veracidade dos diversos modelos de
aeronaves nativas em seu pacote (LU; GENG, 2011) (BITTAR et al., 2015). Alem de modelos
de aeronaves de pequeno, medio e grande porte, o X-Plane possui o modelo de alguns
RPA’s.
O simulador de voo X-Plane possui um modulo de entrada e saıda. Este modulo possi-
bilita a troca de informacoes entre o simulador e outros softwares ou hardwares(RESARCH,
2011) (CETIN; KUTAY, 2016).
O modulo de entrada possibilita a insercao de valores a fim de controlar a aeronave
simulada. E possıvel inserir valores de deflexao para as superfıcies de controle e assim
pilotar a aeronave. Da mesma forma, e possıvel ajustar os controles presentes na cabine
da aeronave. Com isto e possıvel configurar e ajustar os avionicos, como a sintonia da
estacao VOR.
O modulo de saıda e responsavel por enviar para fora do simulador os dados simulados,
como sinais de sensores, avionicos, estados da aeronave, entre outros. Com o uso dessa
ferramenta, e possıvel adquirir os valores de posicao da aeronave e os valores emitidos pela
estacao VOR sintonizada, que sao de suma importancia nesse trabalho. Desta forma, e
possıvel verificar a calibracao de uma estacao VOR do simulador, no formato exigido pela
norma (ICAO, 2000). E possıvel tambem, modificar posicao e alinhamento das estacoes,
simulando assim erros, a fim de descrever o seu comportamento.
Portanto, este software e capaz de fornecer as informacoes do voo simulado e receber
comandos de controle. Desta forma, o laco de controle pode ser fechado em HIL e compor
uma ferramenta para testes em bancada para todas as etapas do projeto. Com o uso do
HIL e possıvel executar testes desde a composicao da missao ate a execucao completa com
o AP, ja a ponto de ser embarcado em uma aeronave real.

3 Automatizacao da missao
A criacao de uma rotina automatica permite que a missao seja executada de forma
padronizada. Desta forma, a execucao da missao com uso de um RPA tera pouca depen-
dencia humana. A automatizacao tambem garante que as missoes obedecam as normas
em vigor, tanto sobre a inspecao quanto sobre o espaco aereo, levadas em consideracao
neste trabalho.
Para a automatizacao da missao e necessaria a definicao de alguns itens:
• Aerotronica para inspecao de VOR - Velocidade de cruzeiro e sistema de posiciona-
mento.
• Parametros das trajetorias - Raio da trajetoria, por ser uma trajetoria circular.
Procedimento de decolagem e de aproximacao para proceder na missao circular.
• Criacao das trajetorias – Definir modelo para construcao automatica, a partir da
insercao de dados da missao e geracao dos WP. Geracao dos WP’s a partir dos dados
de posicionamento da decolagem e do VOR.
3.1 Aerotronica para inspecao de VOR
Para realizar a verificacao do VOR e necessario gerar um arquivo de registro da missao.
Este arquivo deve conter as informacoes de Sistema de Posicionamento do Piloto Auto-
matico (SPPA), em conjunto com as informacoes recebidas da estacao VOR em analise.
O SPPA consiste na combinacao do GPS e o sistema de navegacao inercial (do ingles
Inertial Navigation System (INS)) (BARRADO et al., 2013). O SPPA deve ser capaz de
mapear a localizacao de cada amostra do VOR, garantindo a acuracia de 0.6◦, para a
verificacao de alinhamento do VOR (ICAO, 2000). A escolha do SPPA necessario, depende
da largura da radial e da velocidade do RPA durante o voo.
Considere o seguinte exemplo: uma aeronave se deslocando com velocidade de cruzeiro
de 11m/s, em uma regiao com largura da radial VOR 33m. Utilizando um sistema
com a taxa de aquisicao de 1Hz, a posicao seria amostrada a cada 11m, resultando

CAPITULO 3. AUTOMATIZACAO DA MISSAO 33
num erro instrumental 0.3◦. Utilizando um outro sistema, com a taxa de 7Hz, o erro
instrumental diminui para 0:048, sendo suficiente para realizar medicoes com acuracia
de 0.1◦. Desta forma, e possıvel descrever o modelo matematico para determinar o raio
mınimo da trajetoria em funcao da acuracia e dos componentes do RPA.
A Equacao 3.1 traz o calculo do valor do raio mınimo da trajetoria em funcao das
variaveis do problema.
R =( veltaxa
)360◦
2π · ∆r(3.1)
V el – Velocidade de cruzeiro da aeronave (ms
)
taxa – Taxa de aquisicao do GPS (Hz)
∆ r – Acuracia esperada (◦)
R – Raio da trajetoria (m)
Assim, fixando a velocidade de cruzeiro da aeronave em 10.5m/s, a taxa de amostra-
gem do SPPA em 7Hz e definindo a acuracia do experimento fixada em 0.1◦, e possıvel
determinar o raio mınimo que obedece aos requisitos do projeto em 0.4641NM (859.51m).
Na Secao 6.2.1, sera mostrado um experimento que modela o erro em funcao do raio da
trajetoria. Serao utilizados valores proximos a este resultado.
3.2 Trajetorias para inspecao de VOR
Para realizacao da inspecao periodica do VOR, a aeronave deve proceder em uma
trajetoria circular, a fim de cruzar todas as radiais ao menos uma vez. A proposta da
troca da aeronave de medio porte por um RPA, permite minimizar o raio da trajetoria e
utilizar um sistema de posicionamento com menor precisao. Desta forma, realizando mais
de uma aquisicao para cada radial e procedendo em mais de uma volta, e possıvel realizar
o modelamento estatıstico do erro para cada radial e para o sistema completo.
As trajetorias foram criadas com valores multiplos ou submultiplos de 1NM , que e
a grandeza usada pela norma internacional (ICAO, 2000). Foi proposta uma variacao na
dimensao do raio (Secao 6.2.1), para verificar a influencia dele no erro das leituras.
Os WP’s podem ser inseridos no software de planejamento de missao por meio de
um arquivo de texto. Neste aquivo, os WP’s sao inseridos com a posicao geodesica,
altitude e algumas outras entradas de configuracao. Este arquivo e importante para a
automatizacao da missao, uma vez que, sendo construıdo o codigo capaz de gerar os
WP’s, e possıvel alterar qualquer parametro facilmente. Isto facilita a realizacao assim a

CAPITULO 3. AUTOMATIZACAO DA MISSAO 34
realizacao de testes, e apos o refinamento dos resultados, facilitara a criacao de missoes
de forma padronizada.
3.2.1 Definicao das trajetorias
A verificacao do VOR realizada com uma aeronave de medio porte, e procedida com
um raio de alguns quilometros. O uso do RPA permite a diminuicao desse raio e a nao
entrada no espaco aereo segregado. A autonomia de voo do RPA limita a escolha do raio
da trajetoria. A escolha do raio deve ser feita buscando maximizar a autonomia de voo e
obedecer aos requisitos da norma. A autonomia varia de acordo com a aeronave utilizada,
fazendo com que seja um limitador do projeto.
A criacao da janela de aquisicao, para cada radial, permite a leitura e armazenamento
de diversas amostras a cada passagem pela radial. Ao realizar varias voltas em torno da
estacao, em conjunto com a janela de aquisicao, e possibilitado a determinacao das medias
e desvios-padrao, para cada radial. Desta forma, e possıvel determinar os erros para cada
radial e para a estacao como um todo.
Foram definidas algumas trajetorias preliminares para realizar as simulacoes, com raios
variando entre 0.25NM (463m) e 1.5NM (2778m) de forma a verificar o comportamento
do erro nessa regiao, todas as trajetorias foram tracadas com altitude de 90m. Esta regiao
foi escolhida de modo a determinar o menor raio possıvel para realizacao da missao, para
minimizar o tempo de voo. As trajetorias, para as simulacoes, foram construıdas para a
verificacao da estacao VOR de Sao Jose dos Campos – SP, podendo ser construıdas em
outras estacoes VOR.
3.2.2 Criacao das trajetorias
Para automatizar a criacao das trajetorias, foi desenvolvido nao somente a trajetoria
em torno da estacao VOR, mas tambem numa rotina que compreende a decolagem, apro-
ximacao da trajetoria de inspecao e trajetoria de inspecao, como mostra a Figura 3.1. A
rotina de decolagem foi criada para proceder sobre a pista do aerodromo, que pode ser
modificada para lancamentos forcados. E a rotina de aproximacao deve levar em consi-
deracao o local do final da rotina de decolagem e a posicao do VOR. Esta aproximacao
deve ser feita de forma a entrar na trajetoria de forma suave, proxima a tangencia da
circunferencia da inspecao. Para a etapa de inspecao sao criados WP’s dispostos sobre a
circunferencia que tem sua origem na posicao do VOR a ser inspecionado, com o raio esco-
lhido pelo projetista. Ao alcancar o ultimo WP, o RPA retorna para o local de decolagem
e permanece circulando neste ponto.
Para a criacao da trajetoria completa foi criado um codigo Matlabr que gera os WP’s

CAPITULO 3. AUTOMATIZACAO DA MISSAO 35
VOR
Decolagem
sobre a pista.
Aproximação da
trajetória de inspeção.
Trajetória de
inspeção.
FIGURA 3.1 – Formato da rotina automatica de inspecao, com as etapas de decolagem,aproximacao da trajetoria de inspecao e trajetoria de inspecao.
a partir dos dados de entrada: Local da decolagem; Proa da pista; Local da estacao VOR.
A rotina de criacao dos WP deve seguir um padrao aceito pelo gerenciador da missao. Os
WP devem estar em um arquivo de texto do tipo .TXT e cada um em uma linha seguindo o
formato da Tabela 3.1, obedecendo o padrao MavLink. Para a criacao de WP’s sem outra
funcao, apenas ponto de passagem, o Comando recebe o valor 16 e os parametros(Param1,
Param2, Param3 e Param4) devem receber o valor 0. Estes parametros sao utilizados caso
o RPA deva proceder em alguma funcao especial ao chegar ao WP, por exemplo chavear
para outro WP fora de sequencia.
TABELA 3.1 – Formatacao dos parametros para compor o WP para enviar ao Ardupilotpelo protocolo MavLink
N◦ WP 03 Comando Param1 Param2 Param3 Param4 Lat Lon Alt 1
Desta forma, utilizando esses comandos e possıvel construir a trajetoria da forma que
o projetista escolher. A partir, basicamente, da informacao de comando e da posicao
dos WP, a missao e construıda como se queira. Por exemplo, para construir um WP
com latitude −23.632755◦, longitude −46.661719◦ e altitude 90.0m a linha a ser inserida

CAPITULO 3. AUTOMATIZACAO DA MISSAO 36
mostrada na Tab. 3.2.
TABELA 3.2 – Exemplo insercao de WP.
1 0 3 16 0 0 0 0 -23.632755 -46.661719 90.00 1
Foi criada uma funcao, radial ponto, para calcular os valores de latitude e longitude de
um WP. Esta funcao, mostrada na Equacao 3.2, tem como entradas a latitude e longitude
atuais, a distancia para o proximo WP (∆S), o angulo entre os WP (ϕ) e a declinacao
magnetica local (δmag). A partir desta funcao, sao criados os WP’s de forma automatica.
O primeiro WP inserido e a posicao de decolagem, dando inıcio ao laco de calculo dos
WP’s da missao.
[latWP , lonWP ] = radial ponto(latatual, lonatual,∆S, ϕθ, δmag) (3.2)
Para a decolagem, foi proposto que o RPA procedesse sobre a pista ate atingir a
altitude dos testes, a fim de garantir uma regiao segura, sem edificacoes. Para isto, foram
criados seis WP’s em linha reta, com o angulo entre eles de valor igual a proa da pista.
Para a modificacao da altitude foi criado um valor ∆h, de forma a decolagem ser procedida
em passos igualmente espacados, onde a cada WP gerado e acumulando ∆h no valor da
altitude, ate atingir a altitude pretendida. A Equacao 3.3 mostra como e feito o calculo
deste valor, onde e levado em consideracao a altitude final (altitude) e o numero de WP’s
do procedimento (numeroWP ).
∆h =altitude
numeroWP
(3.3)
Apos o termino da rotina de decolagem, e dado inıcio a rotina de aproximacao. A
rotina de aproximacao leva em consideracao o ponto do termino da rotina de decolagem e
o ponto do VOR. Esta etapa sera composta por 30 WP’s. A Equacao 3.4 mostra a forma
de calculo de ∆Saprox. Este valor e responsavel pela aproximacao da aeronave a trajetoria
da inspecao. Esta equacao leva em consideracao a distancia para o VOR (∆SV OR), o raio
da trajetoria de inspecao (R) e o numero de WP’s da rotina de aproximacao (numeroWP ).
∆Saprox = − ∆SV OR −R
numeroWP − 1(3.4)
Apos a preparacao dos WP’s da rotina de aproximacao, e necessario determinar o
angulo em que o WP esta em relacao ao VOR. O Matlabr possui uma funcao para
realizar esse calculo que retorna o angulo θ entre o norte do primeiro ponto geodesico e a
reta formada entre o primeiro e o segundo ponto geodesico. A funcao azimuth, Equacao

CAPITULO 3. AUTOMATIZACAO DA MISSAO 37
3.5, tem como entrada os valores de latitude e longitude para os dois pontos em analise,
onde latvor e lonvor, pontos da estacao VOR e, lataeronave e lonaeronave pontos do receptor,
a Figura 3.2 mostra as entradas e a saıda desta funcao. Desta forma, para o estudo em
questao, e feita a correcao da declinacao magnetica local (δmag) na Equacao 3.5, como
mostra a Equacao 3.6.
θ = azimuth(latvor, lonvor, lataeronave, lonaeronave) (3.5)
θ = azimuth(latvor, lonvor, lataeronave, lonaeronave) − δmag (3.6)
Norte magnético(N)
VOR
θ
Longitude(°)
Latitude(°)
lonvor lonaeronave
lat vor
lat a
eronave
FIGURA 3.2 – Apresentacao das entradas (latvor, lonvor, lataeronave, lonaeronave) e da saıda(θ) da Equacao 3.5.
No inıcio da rotina de aproximacao sao calculados os valores de ∆S e θ para o ultimo
WP da rotina de decolagem. A cada uma das interacoes, o valor de ∆S acumula o valor
de ∆Saprox. Ja o valor de θ acumula o valor de 3◦, este valor foi escolhido para seguir a
mesma cadencia da trajetoria da missao, que possui esta variacao angular. Este valor foi
determinado apos uma serie de tentativas de geracao automatica da missao.
A trajetoria circular, para a execucao dos testes, foi criada como uma sequencia de
WP que formam uma circunferencia, com sua origem sendo a posicao da estacao VOR. Os

CAPITULO 3. AUTOMATIZACAO DA MISSAO 38
WP’s sao gerados utilizando-se o comprimento de arco DeltaS calculado em funcao do raio
da trajetoria definido pelo projeto e com variacao de 3◦ no valor do angulo, procedendo a
volta completa pois serao criados 120 WP’s. Porem, o raio utilizado para o calculo do WP
nao e exatamente o definido em projeto. Cada WP e calculado usando Rprojeto+Deltar ou
Rprojeto −Deltar, ver Figura 3.3. Isso faz com que o RPA realize uma trajetoria parecida
com o Slalom. Esta proposta foi feita para que o RPA tenda a executar uma trajetoria
proxima a projetada. Isto ocorre, pois, a tendencia do movimento, faz com que o RPA
passe por um WP a direita da origem do WP e outro a esquerda, fazendo o movimento
tender ao projetado.
Trajetória desejada
WP
WP
Origem do WP
WP
∆r∆r
∆r
FIGURA 3.3 – Construcao da trajetoria com pequena variacao do raio de forma a atingira trajetoria desejada.
3.2.2.1 Trajetorias resultantes
A construcao da trajetoria tem como entrada as variaveis de localizacao da estacao
VOR, o local da decolagem, a declinacao magnetica e a proa da pista. Desta maneira, o
algoritmo determina a melhor forma de aproximacao para a orbita da missao.
Por exemplo, no aeroporto de Sao Jose dos Campos - SP (SJC) a estacao VOR fica
em rota de aproximacao da proa 33 da pista. Nesse rumo, ao aproximar-se do aeroporto,
a aeronave encontra a estacao antes da pista. Ja no caso do aeroporto de Campinas - SP
(CPN), em rota de aproximacao nas duas proas possıveis da pista a aeronave encontra
primeiro a cabeceira da pista, ou seja, a estacao fica entre as duas cabeceiras de pista.
Na Figura 3.4, e possıvel ver o resultado da trajetoria, para o caso do aeroporto de SJC,
com decolagem procedendo a proa 33, com marcador (o) em azul. A rotina de decolagem
e realizada ate atingir a altitude de 90m. Em seguida, indicado com marcador (∗) em
vermelho, a aeronave procede em uma curva a esquerda comecando a aproximacao a orbita
de inspecao. Apos atingir a distancia para o VOR igual ao raio pretendido, de 0.5NM
(926m), a aeronave entra em orbita, com marcador (+) em amarelo, permanecendo ate
atingir o numero de voltas estipuladas.

CAPITULO 3. AUTOMATIZACAO DA MISSAO 39
-45.87 -45.865 -45.86 -45.855 -45.85 -45.845-23.255
-23.25
-23.245
-23.24
-23.235
-23.23Local de partida
Decolagem
Aproximação
Órbita de inspeção
FIGURA 3.4 – Construcao da trajetoria para sjc, com as rotinas de decolagem, aproxi-macao e orbita de inspecao.
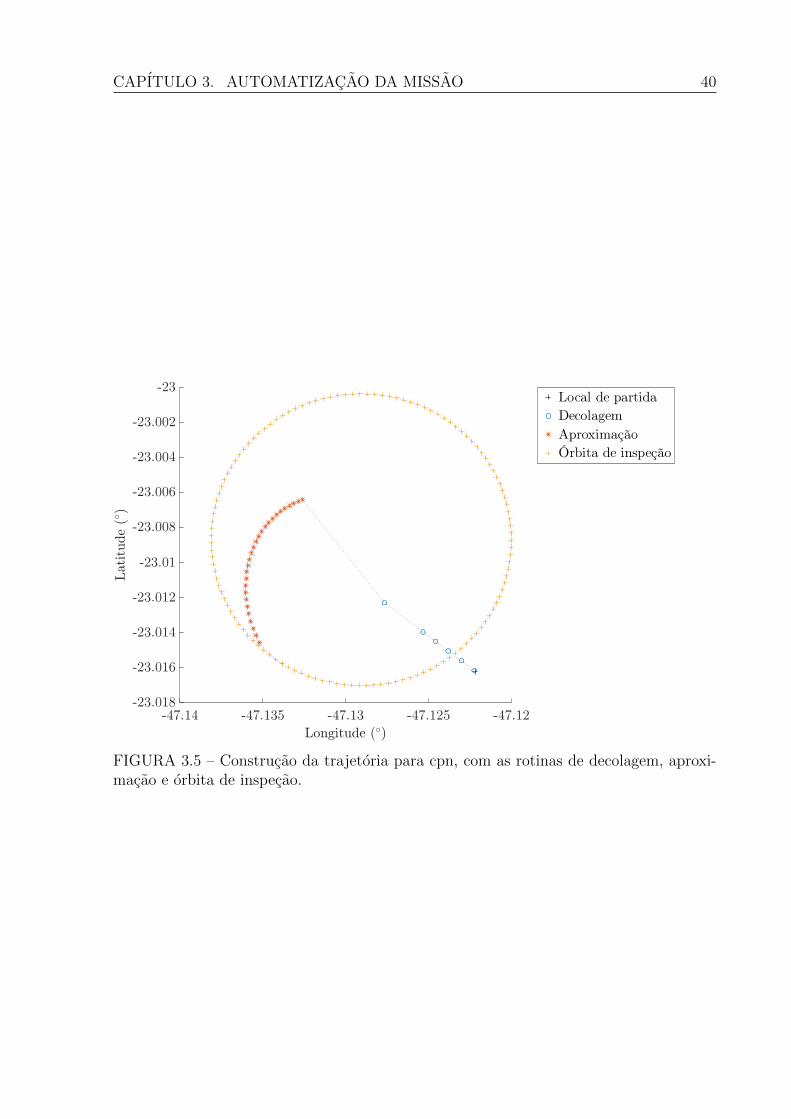
Na Figura 3.5 e possıvel ver o resultado da trajetoria para o caso do aeroporto de
CPN, com decolagem procedendo a proa 33. A trajetoria foi construıda com os mesmos
parametros de raio e altitude, porem como a posicao de estacao esta dentro da orbita, a
aproximacao tem o comportamento diferente, porem de forma a obter o raio de 0.5NM
(926m) e proceder com a orbita da missao.
Nas Figuras 3.6 e 3.7, e possıvel ver a rotina de decolagem sobre a pista, para os
aeroportos de SJC e CPN, respectivamente. E possıvel ver tambem a diferenca entre os
dois casos devido ao posicionamento do VOR. No caso de SJC, onde a trajetoria se afasta
da pista para proceder na trajetoria circular e em CPN e mantida a tendencia apenas
procedendo na aproximacao.
CAPITULO 3. AUTOMATIZACAO DA MISSAO 40
-47.14 -47.135 -47.13 -47.125 -47.12-23.018
-23.016
-23.014
-23.012
-23.01
-23.008
-23.006
-23.004
-23.002
-23Local de partida
Decolagem
Aproximação
Órbita de inspeção
FIGURA 3.5 – Construcao da trajetoria para cpn, com as rotinas de decolagem, aproxi-macao e orbita de inspecao.

CAPITULO 3. AUTOMATIZACAO DA MISSAO 41
FIGURA 3.6 – Visao aerea da trajetoria construıda para inspecao do VOR de SJC (GO-
OGLE, 2018a).

CAPITULO 3. AUTOMATIZACAO DA MISSAO 42
FIGURA 3.7 – Visao aerea da trajetoria construıda para inspecao do VOR de CPN(GOOGLE, 2018b).

4 Sistema de posicionamento
Na atualidade existem diversas pesquisas onde o objetivo e o uso ou o estudo de
aplicacoes de RPA (DEUS et al., 2017) (SILVA et al., ). Estas pesquisas envolvem o sistema
como um todo, seus diversos subsistemas e a integracao entre eles (FELIZARDO, 2016).
Um braco dessas pesquisas envolve o sistema de posicionamento, que corresponde a fusao
entre o INS e GPS, de forma a possibilitar ao sistema de posicionamento leituras com boa
acuracia e em tempo real (KAMARUDIN; TAHAR, 2015) (DU et al., 2009).
O SPPA e o sistema utilizado pelo PA para realizar a navegacao usando coordenadas
geograficas. O uso do GPS em conjunto com o INS no SPPA possibilita a insercao de WP
usando posicionamento global, desta forma se torna viavel a criacao de missoes, pousos
e decolagens automaticas que podem necessitar de dados geograficos (IZADI et al., 2015)
(SKULSTAD et al., 2015). O SPPA tambem possibilita a criacao do registro de dados da
missao para posterior analise.
O uso do GPS para a navegacao deve levar em consideracao alguns fatores limitantes
como taxa de amostragem, acuracia e precisao das amostras de posicao. A taxa de
amostragem e uma variavel com valor maximo definido pelo fabricante do receptor do
GPS. A acuracia e a precisao da posicao estimada sao afetadas diretamente pela distancia
em que o receptor se encontra da origem do sinal (PANICE et al., 2017). A passagem por
zonas como a Ionosfera tambem pode causar interferencia no sinal recebido (KAPLAN;
HEGARTY, 2006). E diferencas entre o sistema de temporizacao do transmissor e do
receptor interferem na acuracia da estimativa (KAPLAN; HEGARTY, 2006). Por ser afetado
por essas interferencias, a posicao estimada pelo GPS sofre uma degeneracao, criando um
raio de incerteza para esta estimativa. Essa incerteza na posicao tem natureza de uma
distribuicao normal, tendo uma media e um desvio-padrao (ROHRER, 2017).
Neste capıtulo sao apresentados experimentos realizados a fim de verificar se o SPPA
possui a taxa de amostragem, precisao e acuracia das amostras de posicao necessarios
para a verificacao do VOR.

CAPITULO 4. SISTEMA DE POSICIONAMENTO 44
4.1 Ensaios para o sistema de posicionamento
A fim de estudar as informacoes fornecidas pelo SPPA em uso, esta secao apresenta um
experimento estatico e um dinamico, realizados de forma a verificar a taxa de aquisicao e
os erros de leitura de posicao. O estudo desses erros e de suma importancia para o correto
entendimento dos dados que forem obtidos pelo sistema. O ensaio estatico foi concebido
para verificar os erros de tendencia para a latitude e longitude. E o ensaio dinamico foi
criado de modo a verificar a distancia entre as amostras de posicao e a forma que esta
distancia esta relacionada com a taxa de amostragem do SPPA e a velocidade do veıculo
em que o PA esta embarcado.
E valido atentar que os dados de erro obtidos foram decorrentes de um numero limitado
de experimentos, especificamente, foram realizados quatro experimentos. Assim, e possıvel
que, em outros experimentos, realizados em dias ou horarios diferentes, os resultados
resultem em variacoes nestes valores de erros.
4.1.1 Ensaios estaticos
Essa etapa do experimento tem por objetivo dimensionar o erro devido a dispersao
tanto de tendencia como do raio de incerteza de posicao. Isso serve para validar o SPPA
do AP para execucao da missao de verificacao de alinhamento de uma estacao VOR.
Para a verificacao e quantizacao do desvio devido a tendencia e desvio padrao do
sistema de posicionamento do AP, foi proposto um experimento onde, em um ponto
geodesico conhecido, o sistema foi deixado por um determinado tempo. Esse experimento
busca a distribuicao durante o tempo de aquisicao. De posse do valor medio, e feita a
comparacao com o valor do ponto conhecido e tambem e determinado o desvio padrao da
amostra.
Foi concedido, pela Forca Aerea Brasileira, o acesso a dois pontos geodesicos no patio
do Aeroporto de SJC. Estes pontos tem sua localizacao conhecida e com altıssima precisao.
Ambos os pontos ficam a ceu aberto, o que possibilita o uso de um sistema GPS. A Figura
4.1 mostra a imagem por satelite, onde pode-se visualizar a posicao dos dois pontos com
a latitude e longitude de cada um.
O experimento foi feito da mesma forma nos dois pontos, foi deixado o aparato sobre
cada ponto por aproximadamente 40min de maneira estatica. A Tabela 4.1 mostra a
localizacao geodesica para os dois pontos de referencia onde o sistema foi colocado. A
Tabela 4.2 traz o erro de tendencia, maior erro e desvio-padrao da media, ambos em
metros, para as aquisicoes realizadas.
No primeiro caso, verifica-se um erro medio obtido pelas informacoes SPPA maiores

CAPITULO 4. SISTEMA DE POSICIONAMENTO 45
Ponto 2
-23.2225816361°
-45.8654871222°
Ponto 1
-23.2237288111°
-45.8642428055°
FIGURA 4.1 – Visao aerea do aeroporto de SJC (GOOGLE, 2018c) com a localizacao dosdois pontos geodesicos usados como referencia.
TABELA 4.1 – Coordenadas geodesicas dos dois pontos de referencia utilizados nos testes.
Ponto Latitude (◦) Longitude (◦)1 -23.2237288111 -45.86424280552 -23.2225816361 -45.8654871222
TABELA 4.2 – Valor dos erros e desvios-padrao dos dois pontos em (m).
Ponto εmedio (m) εmax (m) σ (m) σm (m)1 3.50 4.70 0.59 0.012 2.06 3.92 0.87 0.01
que no segundo caso. E possıvel ver, na Figura 4.2, a nuvem de pontos da aquisicao
referente ao primeiro ponto de referencia e tambem a localizacao desta nuvem em relacao
ao ponto de referencia no centro do cırculo de raio igual a 1m.
No segundo caso, onde as medidas foram feitas com o sistema SPPA localizado no
ponto 2, os dados obtidos estao apresentados na Figura 4.3. Neste experimento, verifica-
se que a nuvem de pontos obtidas pelo SPPA esta mais proxima da localizacao do ponto
geodesico utilizado como referencia, mostrando o menor erro apresentado na Tabela 4.2.

CAPITULO 4. SISTEMA DE POSICIONAMENTO 46
-45.864250 -45.864230
-23.223770
-23.223760
-23.223750
-23.223740
-23.223730
-23.223720Ponto de referência
SPPA
-1.62 0.27 2.16 4.04
-1.85
-0.38
1.09
2.57
FIGURA 4.2 – Nuvem de pontos, em azul, e referencia marcada no centro do cırculo com1m de raio.
4.1.1.1 Ensaio estatico sem coordenada geodesico
Para demostrar a acuracia verificada no experimento estatico, foi proposto um expe-
rimento fora dos pontos geodesicos conhecidos. Desta forma sera possıvel determinar se
a tendencia e alterada ao reiniciar o sistema e a dispersao dos pontos a partir de uma
distancia conhecida.
Neste experimento foi demarcado um ponto central, a partir desta referencia, foi de-
senhado um quadrado com a diagonal de 6m. Desta forma este quadrado esta inscrito
numa circunferencia com raio de 3m. As aquisicoes de dados serao realizadas nos quatro
vertices do quadrado. A Figura 4.4 mostra a disposicao dos cinco pontos a serem testa-
dos. O aparato e deixado por 5min em cada ponto, em seguida, e feita a mesma analise
estatıstica do primeiro experimento.
Apos fazer a analise dos dados do experimento, verificou-se que os pontos medios das
quatro nuvens em relacao a posicao central foram os descritos na Tabela 4.3. E possıvel
verificar que, levando em consideracao os desvios padrao, os quatro pontos estimados,
estao com distancia igual a distancia medida fisicamente. A Figura 4.5 mostra as quatro

CAPITULO 4. SISTEMA DE POSICIONAMENTO 47
-45.865495 -45.865485 -45.865475 -45.865465
-23.222610
-23.222605
-23.222600
-23.222595
-23.222590
-23.222585
-23.222580
-23.222575Ponto de referência
SPPA
-0.20 1.12 2.43 3.75
-3.81
-2.40
-0.99
0.42
FIGURA 4.3 – Nuvem de pontos, em azul, e referencia marcada no centro do cırculo com1m de raio.
FIGURA 4.4 – Disposicao dos pontos para teste de referencia.
nuvens de pontos do experimento e um cırculo de referencia com o raio de 3m. E possıvel
ver que os pontos estao bem proximos ao cırculo de referencia.
Com esse segundo experimento e possıvel notar que o erro de tendencia se comportou
de maneira contınua.

CAPITULO 4. SISTEMA DE POSICIONAMENTO 48
TABELA 4.3 – Distancias entre os pontos medios e o centro cırculo, com seus desvios-padrao.
Distancia do centro (m) σm (m)1 2.77 0.642 2.31 0.893 2.72 0.624 2.27 0.78
-45.874480 -45.874460 -45.874440
-23.208440
-23.208430
-23.208420
-23.208410
-23.208400
-23.208390
Ponto de referência
SPPA
-0.78 1.35 3.47 5.60
-4.49
-2.43
-0.37
1.69
FIGURA 4.5 – Quatro nuvens de pontos referente as quatro pontos do experimento.
4.1.2 Ensaio dinamico
O ensaio dinamico foi concebido de forma a possibilitar a analise da distancia entre as
amostras de posicao (δx) fornecidas pelo SPPA e a analise do erro entre o valor de posicao
fornecido pelo SPPA e o valor de posicao fornecido por um GPS diferencial ( do ingles
Differential Global Positioning System(DGPS)), usado como o valor de referencia. Esta
analise da distancia entre as amostras de posicao e importante para entender a forma que
δx varia em funcao da velocidade do veıculo onde o PA esta embarcado. O distanciamento
tambem esta ligado a taxa de aquisicao da posicao para cada sistema.

CAPITULO 4. SISTEMA DE POSICIONAMENTO 49
4.1.2.1 Sistemas de posicionamento utilizados
As trajetorias do ensaio dinamico foram adquiridas com o uso do SPPA e de um DGPS.
O DGPS utilizado foi o DL-V3 do fabricante NovAtel cedido gentilmente pelo comando
do Instituto de pesquisas e Ensaios em Voo(IPEV) da Aeronautica Brasileira, sediado em
SJC.
O DGPS utilizado suporta a taxa de aquisicao de ate 20Hz, sendo que estava ajustado
para 10Hz. Este possui acuracia de posicao de 0.45m (NOVATEL, 2009). O GPS utilizado
pelo SPPA tem acuracia para a posicao inferior a 2.5m e taxa maxima em 10Hz (UBLOX,
2016).
O GPS utilizado pelo SPPA tem a taxa de aquisicao fixada em 5Hz. Para comple-
mentar as leituras, aumentando a taxa do sistema completo ou para a navegacao no caso
de perda do sinal do GPS, o AP faz uso do INS. Usando-se INS e GPS e possıvel tam-
bem aumentar a resolucao do sistema (LIM et al., 2014). Neste experimento, pretende-se
mostrar a precisao do SPPA com a taxa de 7Hz, valor proposto na Secao 3.1, para ser
embarcado em missao para verificacao de alinhamento de uma estacao VOR.
A Tabela 4.4 mostra as caracterısticas dos dois equipamentos, DGPS e GPS, onde
e possıvel ver a maior precisao do sistema DGPS, a partir da caracterıstica quanto a
acuracia, e a maior taxa de aquisicao. Utilizou-se o DGPS para gerar a referencia do
experimento a ser executado.
TABELA 4.4 – Comparacao entre os equipamentos de DGPS e de GPS.
Equipamento Acuracia(m) Precisao(m) Max. taxa(Hz) Taxa utilizada(Hz)DL-V3(DGPS) 0.45 <0.25 20 10
m8n(GPS) 2.5 – 10 5
4.1.2.2 Trajetorias
Foram feitos dois experimentos com velocidades medias diferentes, de forma a compa-
rar a influencia da velocidade na aquisicao dos dados. A trajetoria 1 foi executada com
velocidade media Vm ≈ 1m/s, e a trajetoria 2 com Vm ≈ 3m/s. As duas trajetorias foram
executadas em ambiente aberto, em uma tarde de ceu aberto, com poucas nuvens.
Foram retirados dois intervalos de cada uma das trajetorias, totalizando quatro in-
tervalos, para os quais as informacoes obtidas com o SPPA serao comparadas com as
informacoes obtidas do DGPS, que serao consideradas as informacoes de referencia. Os
intervalos 1.1 e 1.2 foram retirados da trajetoria 1 os intervalos 2.1 e 2.2 foram retirados
da trajetoria 2.

CAPITULO 4. SISTEMA DE POSICIONAMENTO 50
A Figura 4.6 mostra a visao por satelite mostrando a posicao media onde cada intervalo
se encontra.
1.2
2.2
2.1
1.1
FIGURA 4.6 – Visao aerea (GOOGLE, 2018d) da posicao central dos quatro intervalos.
As Figuras 4.7 e 4.8 mostram, respectivamente, os intervalos 1.1 e 1.2, retirados da
trajetoria 1 (Vm ≈ 1m/s). Nestas figuras, e possıvel notar o afastamento entre as posicoes
aquisitadas com o DGPS, com marcador −x− em preto, e as aquisitadas com o SPPA,
com marcador −o− em vermelho.

CAPITULO 4. SISTEMA DE POSICIONAMENTO 51
-45.864370 -45.864360 -45.864350 -45.864340 -45.864330 -45.864320
-23.223610
-23.223600
-23.223590
-23.223580
-23.223570
-23.223560
SPPA
DGPS
0.00 2.00 4.00 6.00
-6.85
-4.57
-2.28
0.00
Tempo inicial
Tempo final
FIGURA 4.7 – Intervalo 1.1, retirado da trajetoria 1, mostrando em vermelho (−o−) aaquisicao do SPPA e em preto (−x−) a do DGPS.
-45.865300 -45.865250 -45.865200 -45.865150 -45.865100
-23.222950
-23.222900
-23.222850
-23.222800
-23.222750
SPPA
DGPS
0.00 8.07 16.14 24.21
-26.87
-17.91
-8.96
0.00
Tempo final
Tempo inicial
FIGURA 4.8 – Intervalo 1.2, retirado da trajetoria 1, mostrando em vermelho (−o−) aaquisicao do SPPA e em preto (−x−) a do DGPS.
As Figuras 4.9 e 4.10 mostram, respectivamente, os intervalos 2.1 e 2.2, retirados da
trajetoria 2 (Vm ≈ 3m/s). Nestas figuras, e possıvel notar o afastamento entre as posicoes
aquisitadas com o DGPS, com marcador −x− em preto, e as aquisitadas com o SPPA,
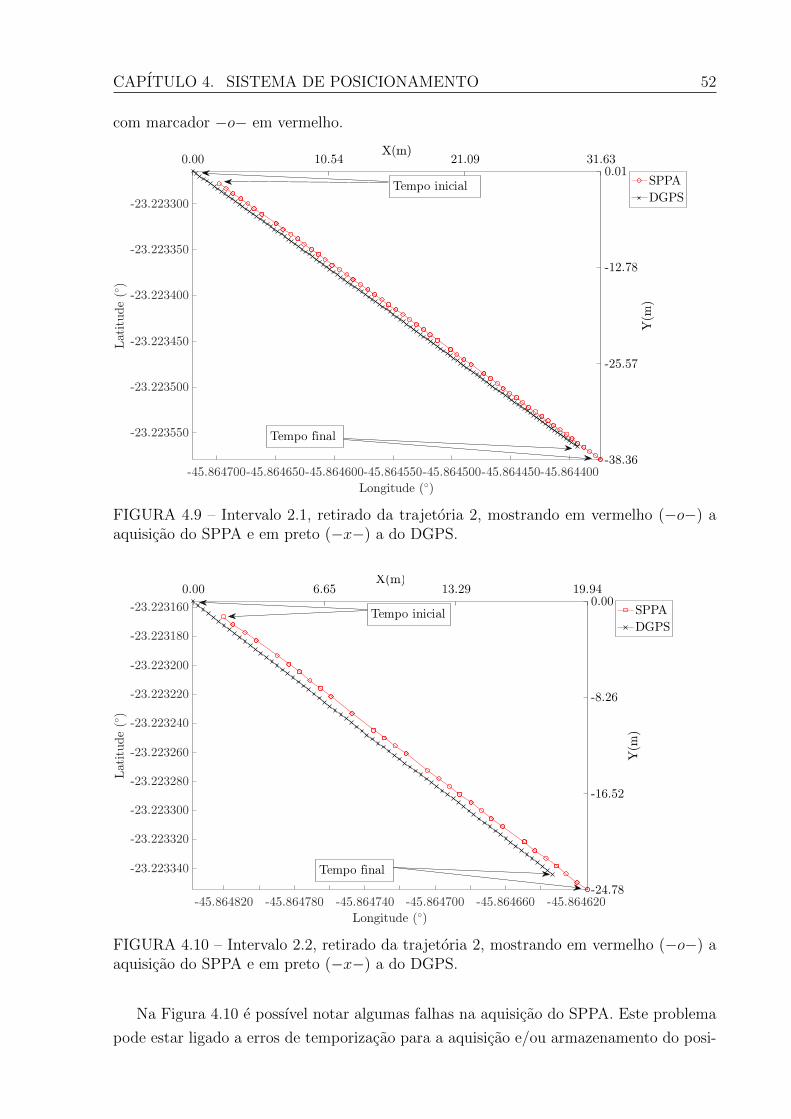
CAPITULO 4. SISTEMA DE POSICIONAMENTO 52
com marcador −o− em vermelho.
-45.864700-45.864650-45.864600-45.864550-45.864500-45.864450-45.864400
-23.223550
-23.223500
-23.223450
-23.223400
-23.223350
-23.223300
SPPA
DGPS
0.00 10.54 21.09 31.63
-38.36
-25.57
-12.78
0.01
Tempo inicial
Tempo final
FIGURA 4.9 – Intervalo 2.1, retirado da trajetoria 2, mostrando em vermelho (−o−) aaquisicao do SPPA e em preto (−x−) a do DGPS.
-45.864820 -45.864780 -45.864740 -45.864700 -45.864660 -45.864620
-23.223340
-23.223320
-23.223300
-23.223280
-23.223260
-23.223240
-23.223220
-23.223200
-23.223180
-23.223160 SPPA
DGPS
0.00 6.65 13.29 19.94
-24.78
-16.52
-8.26
0.00
Tempo final
Tempo inicial
FIGURA 4.10 – Intervalo 2.2, retirado da trajetoria 2, mostrando em vermelho (−o−) aaquisicao do SPPA e em preto (−x−) a do DGPS.
Na Figura 4.10 e possıvel notar algumas falhas na aquisicao do SPPA. Este problema
pode estar ligado a erros de temporizacao para a aquisicao e/ou armazenamento do posi-

CAPITULO 4. SISTEMA DE POSICIONAMENTO 53
cionamento. Isto mostra a necessidade de ser realizada mais de uma volta na verificacao
do VOR. Ao dar varias voltas este problema e minimizado quando forem realizados os
calculos de media e desvio-padrao da media.
4.1.2.3 Analise da distancia entre as amostras (δx)
A norma(ICAO, 2000) preve uma incerteza maxima de 0.6◦ para a calibracao do ali-
nhamento do VOR. Para a trajetoria proposta na Secao 3.2, com raio de 0.5NM (926m),
esta incerteza, quando convertida para metros, passa a ter o valor de 9.6m.
Assim o sistema de posicionamento, para ser adequado ao estipulado em norma, deve
ser capaz de fornecer dados sobre a posicao com δx inferior a 9.6m. Desta forma, ao
somar o desvio-padrao da media, calculado para o experimento estatico, com o δx do
experimento dinamico, o valor resultante deve ser menor ou igual a 9.6m.
As trajetorias dinamicas foram executadas com velocidades inferiores a velocidade
estipulada para a realizacao da missao. Esta velocidade foi fixada em 10.5m/s, ou seja,
e necessario realizar a extrapolacao dos resultados obtidos para estimar o δx para esta
velocidade.
Para esta extrapolacao foi feita uma regra de tres simples, desta forma a Equacao 4.1
mostra como sera estimado o valor da distancia entre as amostras para a velocidade que
sera realizada a missao, δxfuturo, a partir da distancia entre as amostras atual, δxatual, a
velocidade atual, Vatual, e a velocidade da missao final, Vfuturo.
δxfuturo =δxatual · Vfuturo
Vatual(4.1)
A Tabela 4.5 mostra os resultados desses quatro intervalos para a aquisicao do SPPA,
com os valores de distancia entre as amostras para a velocidade atual, a velocidade atual
e, a extrapolacao da distancia entre as amostras para a velocidade de 10.5m/s.
TABELA 4.5 – Distancia entre as amostras para a velocidade atual e projecao para avelocidade de cruzeiro de 10.5m/s utilizando o SPPA.
Intervalo δxatual (m) Vatual (m/s) δxfuturo (m) Vfuturo (m/s)1.1 0.15 1.15 1.37 10.51.2 0.16 1.10 1.53 10.52.1 0.33 2.76 1.26 10.52.2 0.44 3.52 1.31 10.5
A Figura 4.11 mostra o comportamento para o δxfuturo, estimado pela Equacao 4.1
para os quatro intervalos analisados das aquisicoes do SPPA. E possıvel verificar que o

CAPITULO 4. SISTEMA DE POSICIONAMENTO 54
valor tem um comportamento proximo de uma constante, ou seja, com pouca variacao em
torno de um valor medio. Desta forma o valor de δxfuturo e estimado em (1.37 ± 0.06)m.
1 2 3 4
1
1.2
1.4
1.6
1.8
2
FIGURA 4.11 – Projecao dos valores de distancia entre as amostras para a velocidade de10.5m/s com o uso do SPPA.
Foi realizada a mesma analise para os dados aquisitados pelo DGPS, que foram reali-
zados para os dados do SPPA. A Tabela 4.6 mostra os resultados desses quatro intervalos
para a aquisicao do DGPS, com os valores de distancia entre as amostras para a veloci-
dade atual, a velocidade atual e, a extrapolacao da distancia entre as amostras para a
velocidade de 10.5m/s.
TABELA 4.6 – Distancia entre as amostras para a velocidade atual e projecao para avelocidade de cruzeiro de 10.5m/s utilizando o DGPS.
Intervalo δxatual (m) Vatual (m/s) δxfuturo (m) Vfuturo (m/s)1.1 0.12 1.15 1.10 10.51.2 0.11 1.10 1.05 10.52.1 0.28 2.76 1.07 10.52.2 0.35 3.52 1.04 10.5
A Figura 4.12 mostra o comportamento para o δxfuturo, estimado pela Equacao 4.1
para os quatro intervalos analisados das aquisicoes do DGPS. Da mesma maneira que
para o caso do SPPA, e possıvel verificar o comportamento constante do valor do δxfuturo.
Desta forma o valor de δxfuturo, para o DGPS, e estimado em (1.06 ± 0.01)m.
A diferenca entre os valores de δxfuturo, para o SPPA e o DGPS, estao ligadas as
diferentes taxa de aquisicao, 7Hz e 10Hz, respectivamente. Porem, mesmo com esta
diferenca e possıvel verificar o comportamento semelhante para os dois sistemas.

CAPITULO 4. SISTEMA DE POSICIONAMENTO 55
1 2 3 4
0.5
1
1.5
FIGURA 4.12 – Projecao dos valores de distancia entre as amostras para a velocidade de10.5m/s com o uso do DGPS.
A Figura 4.13 mostra o comportamento linear do δx em funcao da velocidade, para
as amostras conhecidas e para a extrapolacao. Desta forma foi realizada a interpolacao
linear, dos valores conhecidos, para estimar o valor de δxfuturo.
1 2 3 4 5 6 7 8 9 10 11
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
FIGURA 4.13 – Grafico da distancia entre as amostras em funcao da velocidade.
Aplicando a ferramenta Curve Fitting do Matlabr nos dados de distancia entre as
amostras, δx, em funcao da velocidade, V , ambos da Tabela 4.5, foi determinado a Equa-
cao 4.2.
δx(V ) = 0.1161 · V + 0.02245 (4.2)

CAPITULO 4. SISTEMA DE POSICIONAMENTO 56
Desta forma, aplicando V = 10.5 na Equacao 4.2, o valor de δxfuturo calculado foi
1.24m, proximo ao valor, 1.37m, estimado pelo outro metodo. Desta forma, foi mostrado
a linearidade entre as duas analises.
Realizando a comparacao entre os valores estimados de δxfuturo com o maximo previsto
em norma, de 9.6m, estes valores maximos sao de apenas 14.3% e 11.0% do valor maximo
dado pela norma, para o SPPA e DGPS, respectivamente. A diferenca entre os dois
resultados esta ligada a taxa de amostragem dos dois sistemas, 7Hz para o SPPA e 10Hz
para o DGPS, porem o resultado foi semelhante nos dois casos. Desta forma, os dois
sistemas estao aptos a serem utilizados para a verificacao do VOR.
4.1.2.4 Analise do erro de tendencia
O erro de tendencia e o desvio entre o valor de referencia e o valor obtido, para este caso
de geo-posicionamento ha um desvio para latitude e um para longitude. No experimento
dinamico, onde foi utilizado o DGPS como referencia, foi possıvel notar que o modulo da
tendencia tem baixa variacao com o tempo ou com a velocidade.
A Tabela 4.7 mostra os valores numericos para os erros de tendencia para os quatro
intervalos. Esses erros foram obtidos pela diferenca entre o valor obtido pelo SPPA e pelo
DGPS.
TABELA 4.7 – Erros, medio e maximo para a latitude e longitude medidos em graus (◦).
Ponto Latitude Longitudeεmedio (◦) εmax (◦) εmedio (◦) εmax (◦)
1.1 -2.04e-05 -2.04e-05 1.68e-05 1.68e-051.2 -2.68e-05 -2.68e-05 1.30e-05 1.30e-052.1 -2.74e-05 -2.74e-05 2.19e-05 2.19e-052.2 -3.09e-05 -3.09e-05 2.43e-05 2.43e-05
A partir dos valores de tendencia media, e possıvel calcular o valor medio para a
latitude e a longitude. Este procedimento tem um resultado semelhante ao resultado do
experimento estatico, porem sendo utilizado o DGPS como referencia.
A Tabela 4.8 mostra os valores medios para a tendencia de latitude e longitude. E
possıvel verificar que ambos os metodos atingiram resultados numericos semelhantes.
4.1.3 Resultados
Apos a realizacao dos dois experimentos, estatico e dinamico, e possıvel comparar os
resultados obtidos com os valores estipulados pela norma (ICAO, 2000).
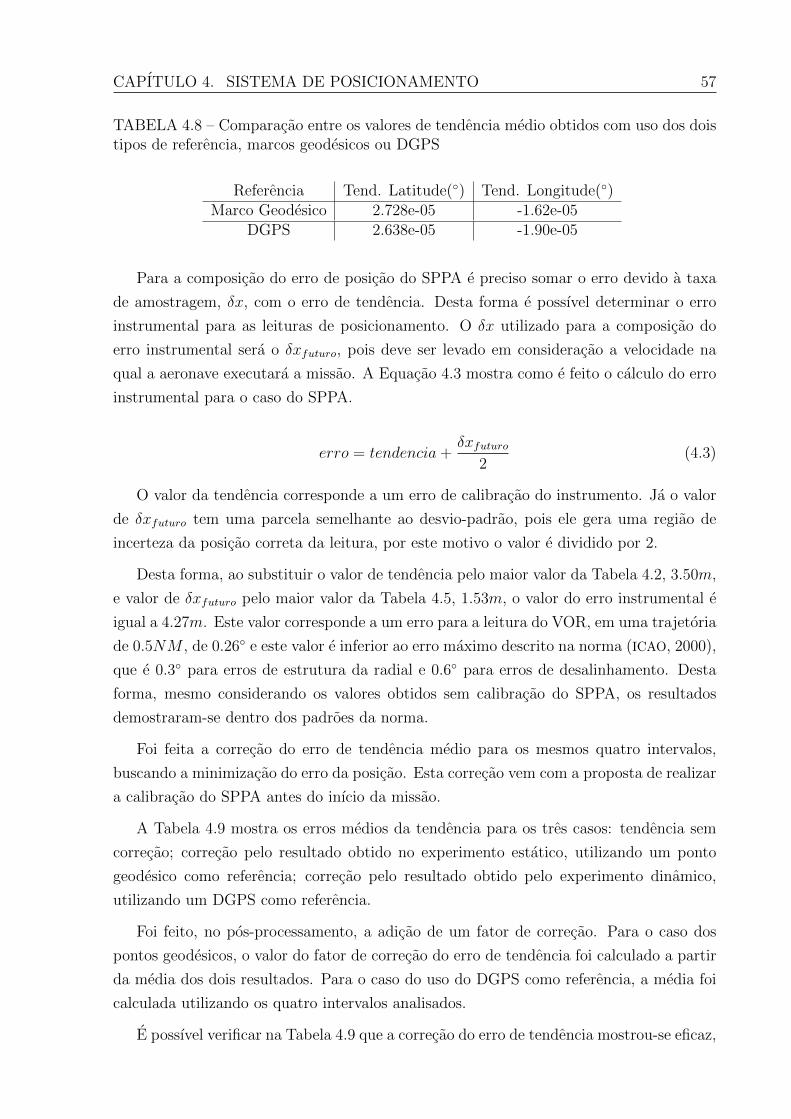
CAPITULO 4. SISTEMA DE POSICIONAMENTO 57
TABELA 4.8 – Comparacao entre os valores de tendencia medio obtidos com uso dos doistipos de referencia, marcos geodesicos ou DGPS
Referencia Tend. Latitude(◦) Tend. Longitude(◦)Marco Geodesico 2.728e-05 -1.62e-05
DGPS 2.638e-05 -1.90e-05
Para a composicao do erro de posicao do SPPA e preciso somar o erro devido a taxa
de amostragem, δx, com o erro de tendencia. Desta forma e possıvel determinar o erro
instrumental para as leituras de posicionamento. O δx utilizado para a composicao do
erro instrumental sera o δxfuturo, pois deve ser levado em consideracao a velocidade na
qual a aeronave executara a missao. A Equacao 4.3 mostra como e feito o calculo do erro
instrumental para o caso do SPPA.
erro = tendencia+δxfuturo
2(4.3)
O valor da tendencia corresponde a um erro de calibracao do instrumento. Ja o valor
de δxfuturo tem uma parcela semelhante ao desvio-padrao, pois ele gera uma regiao de
incerteza da posicao correta da leitura, por este motivo o valor e dividido por 2.
Desta forma, ao substituir o valor de tendencia pelo maior valor da Tabela 4.2, 3.50m,
e valor de δxfuturo pelo maior valor da Tabela 4.5, 1.53m, o valor do erro instrumental e
igual a 4.27m. Este valor corresponde a um erro para a leitura do VOR, em uma trajetoria
de 0.5NM , de 0.26◦ e este valor e inferior ao erro maximo descrito na norma (ICAO, 2000),
que e 0.3◦ para erros de estrutura da radial e 0.6◦ para erros de desalinhamento. Desta
forma, mesmo considerando os valores obtidos sem calibracao do SPPA, os resultados
demostraram-se dentro dos padroes da norma.
Foi feita a correcao do erro de tendencia medio para os mesmos quatro intervalos,
buscando a minimizacao do erro da posicao. Esta correcao vem com a proposta de realizar
a calibracao do SPPA antes do inıcio da missao.
A Tabela 4.9 mostra os erros medios da tendencia para os tres casos: tendencia sem
correcao; correcao pelo resultado obtido no experimento estatico, utilizando um ponto
geodesico como referencia; correcao pelo resultado obtido pelo experimento dinamico,
utilizando um DGPS como referencia.
Foi feito, no pos-processamento, a adicao de um fator de correcao. Para o caso dos
pontos geodesicos, o valor do fator de correcao do erro de tendencia foi calculado a partir
da media dos dois resultados. Para o caso do uso do DGPS como referencia, a media foi
calculada utilizando os quatro intervalos analisados.
E possıvel verificar na Tabela 4.9 que a correcao do erro de tendencia mostrou-se eficaz,

CAPITULO 4. SISTEMA DE POSICIONAMENTO 58
TABELA 4.9 – Comparacao do erro de tendencia entre os dois modos de correcoes pro-postos.
Correcao CorrecaoIntervalo Tendencia (m) Ponto geodesico (m) DGPS (m)
1.1 2.45 0.53 0.541.2 2.53 0.67 0.362.1 3.23 0.33 0.632.2 3.61 0.69 0.95
ao minimizar o valor em 81.2% e 79.1%, respectivamente, usando ponto geodesico como
referencia e usando o DGPS como referencia.
Utilizando os valores corrigidos do erro de tendencia para recalcular o erro instru-
mental, utilizando o maior valor obtido pela correcao do experimento dinamico, o erro
instrumental tem seu novo valor igual a 1.72m. E para o caso da verificacao do VOR,
com a trajetoria com raio de 0.5NM o erro corresponde a 0.11◦, aproximadamente um
terco do mınimo necessario para a realizacao da verificacao do VOR, justificando assim o
desenvolvimento de uma forma de realizar a calibracao do SPPA.
Estes resultados foram obtidos com um numero limitado de ensaios, desta forma e
possıvel que os resultados variem de acordo com o numero de satelites visıveis durante os
ensaios e fatores climaticos. Assim, caso haja um maior numero de ensaios podem ocorrer
variacoes nos resultados.

5 Correcao do GPS - Tereza
Apos determinar os erros para a leitura de posicionamento do SPPA no Capıtulo 4
e apresentar a possibilidade de correcao do erro de tendencia do sistema na Secao 4.1.3,
foi feita a proposta de desenvolvimento de um compensador que seja capaz de corrigir de
forma dinamica as leituras do GPS.
Assim, foi criado um sistema utilizando a plataforma de desenvolvimento Arduino Due
que possui um microcontrolador da famılia ATSAM3X8E, fabricado pela Microchipr.
Este microcontrolador possui uma frequencia de operacao de 84MHz, quatro portas seri-
ais, das quais serao utilizadas duas. Com essas caracterısticas e possıvel realizar a leitura
dos dados, o calculo e a escrita dos valores corrigidos.
Apesar de haver equipamentos DGPS capazes de serem embarcados na aeronave, foram
feitos estes ensaios para determinar se seria possıvel corrigir os erros de tendencia no
sistema GPS nativo da aeronave.
5.1 Sistema completo
O sistema completo e composto pelo GPS, pelo compensador e pelo AP. O GPS
recebera os valores de posicao, o compensador calculara o erro de tendencia das leituras
e enviara os valores corrigidos ao AP. O compensador foi construıdo de forma que o AP
nao percebera que existe algo entre ele e o receptor do GPS. O AP recebera um sinal
semelhante ao esperado da transmissao do GPS sem modificacoes. Desta forma nao ha
necessidade de se alterar o codigo original do AP, isso e um facilitador para o compensador
ser inserido em outros controladores.
O GPS envia para o Ardupilot cinco conjuntos de dados para cada leitura, Navigation
Solution, Navigation Status, Geodetic Position, Dilution of Precision e Velocity in WGS
84 (UBLOX, 2016). Cada um desses conjuntos possui uma finalidade distinta, por exemplo
a Dilution of Precision mostra ao sistema a medida dos erros aleatorios referentes a aquela
leitura.
O conjunto Geodetic Position, que possui os dados de horario, longitude, latitude,

CAPITULO 5. CORRECAO DO GPS - TEREZA 60
altitude sobre o elipsoide - WGS 84(aproximacao matematica para o formato da terra
(KUMAR, 1988)), altitude sobre o nıvel do mar, acuracia horizontal e acuracia vertical.
Para a correcao do erro de posicionamento serao alterados os valores de latitude e longitude
deste conjunto de dados.
A Figura 5.1 mostra o sistema completo, com o compensador intermediando os dados
enviados pelo GPS para o AP, onde todos os dados passam pelo compensador, porem
somente os dados de posicionamento sao corrigidos utilizando as informacoes de erro de
tendencia calculado. E feita a separacao dos dados recebidos e verificado a qual conjunto
ele pertence. Caso seja o conjunto Geodetic Position e feito ou o armazenamento para
o calculo das medias ou a correcao das medidas, utilizando o fator de correcao de erro
calculado. Esta decisao precisa ser feita pois o calculo das medias e feito somente durante
a inicializacao do sistema, onde sao gerados os dois valores para a correcao da latitude e
longitude. Apos a inicializacao, durante a efetiva missao em voo, os fatores de correcao,
calculados na inicializacao, sao utilizados para a correcao dos dados de latitude e lon-
gitude do conjunto Geodetic Position. Para os demais conjuntos os dados sao enviados
diretamente para a porta de saıda.
Microcontrolador(Tereza)
GPS Ardupilot
Configurações
FIGURA 5.1 – Fluxograma do sistema completo, onde se pode ver onde e inserido ocompensador.
Sao feitas mudancas somente nos dados referentes a latitude e longitude. Desta forma
os dados de horario, altitude (sobre o elipsoide e sobre o nıvel do mar) e, acuracia (horizon-
tal e vertical), assim como os conjuntos Navigation Solution, Navigation Status, Dilution
of Precision e Velocity in WGS 84, nao serao afetados pelo compensador.
5.2 Compensador - Tereza
O compensador Tereza tem seu princıpio baseado em uma tomada de dados inicial,
onde sao calculadas as medias para a latitude e longitude em um determinado intervalo
de tempo. A partir dessa media, sabendo-se a posicao onde o sistema foi deixado durante
a inicializacao, e calculado o erro medio para a latitude e longitude e feito armazenamento
do valor, de forma a minimiza-lo ou ate cancela-lo nas amostras seguintes.
CAPITULO 5. CORRECAO DO GPS - TEREZA 61
A Figura 5.2 mostra o fluxograma completo do sistema. O sistema deve ser deixado
por um tempo (inicialmente configurado em 5min) sobre um ponto conhecido com boa
precisao. Desta forma, ao iniciar a rotina sao tomadas as medias para a latitude e longitude
e, calculado o desvio medio entre estes os dados do ponto de referencia. Este valor
resultante e o desvio de tendencia que, apos o tempo determinado o Tereza passa a
corrigir automaticamente esse erro para todas as leituras posteriores.

CAPITULO 5. CORRECAO DO GPS - TEREZA 62
Lê GPS
contador amostras > 150contador amostras++
contador amostras = 0
Geodetic Position
Envia dado
N
flag média = 0(Latitude, Longitude) -= correção N
médias(contador média) += (Latitude, Longitude)*1e-2
contador média++
contador média >= 10
N
i < contador média
médias(contador média) += médias(i)
i++
correção = médias(contador média) / contador média
flag média = 1
N
N
Microprocessador(Tereza)
médias(contador média) =(((médias(contador média) *1e2)/contador amostras) – ponto geodésico)
Cálculo do checksum
contador amostras = 0
flag média = 0
contador média = 0
i = 0
FIGURA 5.2 – Fluxograma do codigo de leitura e correcao das leituras do GPS.

CAPITULO 5. CORRECAO DO GPS - TEREZA 63
A Tabela 5.1 mostra o formato do pacote de enviados pelo GPS. A partir do conheci-
mento do formato e possıvel desenvolver o compensador das leituras.
TABELA 5.1 – Formato do pacote de dados enviados pelo GPS
sinc 1 sinc 2 classe ID dados (little endian) CK A CK B
Cada conjunto de dados recebido possui um identificador para realizar a separacao
dos pacotes. A informacao e iniciada com dois bytes (0xB5 0x62), sinc 1 e sinc 2 res-
pectivamente. Com isso o Tereza e capaz de identificar que esta sendo recebido um novo
conjunto de dados. Ha um terceiro byte que identifica a classe, (0x01) para estes casos.
O quarto byte e o identificador, ID, de cada um dos conjuntos, Navigation Solution
(0x06), Navigation Status (0x03), Geodetic Position (0x02), Dilution of Precision (0x04)
e Velocity in WGS 84 (0x12).
Apos esta sequencia que delimita qual informacao esta sendo recebida, o GPS envia a
sequencia de dados referentes a leitura em si, construıdos sequencialmente do byte menos
significativo para o mais significativo, formato que e conhecido como little endian. A
sequencia recebida do GPS e dependente da informacao, desta forma os dados podem
variar de tamanho e de tipo. Por exemplo a latitude e um valor de quatro byte’s com
sinal e utiliza complemento de dois.
Os dados referentes a latitude e longitude tem um fator de escala de 1e-07 e tem
o valor dado em graus (◦), os demais valores nao possuem fator de escala. Por esse
motivo os valores de latitude e longitude sao numeros inteiros de ate dez algarismos. Por
serem numeros grandes, o calculo dos valores medios foi subdividido em media de medias.
E realizado o calculo da media entre 150 valores, armazenado este valor e apos isto e
calculada a media entre dez destas medias. Isto e feito para que o valor armazenado nao
ultrapasse o limite da memoria do processador.
Os dois ultimos bytes, CK A e, CK B, sao o checksum. Estes bytes sao calculados
como mostra o Algoritmo 1. Para realizar este calculo, sao utilizados os valores que serao
enviados, desde o byte referente a classe, ate o ultimo dado da sequencia. Sem o correto
valor para os bytes do checksum, o conjunto de dados nao e validado.
Para o calculo do CK A, basicamente se soma todos os valores desde a classe ate o final
dos dados. Ja o CK B e feito o acumulo dos valores do CK A e, apos o final das somas,
ambos sao passados por uma mascara de dois bytes para finalizar o processo, conforme
descrito no Algoritmo 1. O calculo do checksum so e necessario para o caso do geodetic
position pois, e o unico conjunto que sera modificado.

CAPITULO 5. CORRECAO DO GPS - TEREZA 64
Algoritmo 1: Calculo do checksum
Entrada: classe, ID, dadosSaıda: CK A, CK B
1 inıcio2 CK A = 03 CK B = 04 para i de 0 ate tamanho(dados) + 2 faca5 se i = 0 entao6 CK A = CK A + classe7 fim se8 senao se i = 1 entao9 CK A = CK A + ID
10 fim se11 senao12 CK A = CK A + dados[i - 2]13 fim se14 CK B = CK B + CK A
15 fim para
16 fim17 CK A = CK A & 0xFF18 CK B = CK B & 0xFF19 retorna CK A, CK B
5.3 Resultados
Para executar testes de funcionamento do Tereza foram realizadas duas tomadas de
dados em local proximo ao ponto 2 da Tabela 4.1. Foram realizados dois experimentos
com erros de posicionamento forcados. Em ambos os experimentos, o sistema foi deixado,
de forma estatica, em um ponto distante do ponto de referencia. A tomada de dados 1
com distancia de 20m e a tomada 2 com distancia de 25m. Desta forma, durante 5min o
Tereza calcula o erro entre a posicao estimada e o ponto de referencia. Apos ser executado
o calculo dos erros de latitude e longitude, o Tereza armazena estes valores para corrigir os
valores posteriores. Na segunda etapa do experimento, durante 10min, o Tereza aquisita
a estimativa da posicao e corrige o erro forcado, fazendo com que a posicao estimada seja
transportada para o ponto de referencia.
A Figura 5.3 mostra o resultado da tomada de dados 1, onde e possıvel verificar a
proximidade do ponto de referencia com os limites da probabilidade da tomada de dados.
Isso e resultado da baixa tendencia para a posicao media.

CAPITULO 5. CORRECAO DO GPS - TEREZA 65
-45.865495 -45.865490 -45.865485 -45.865480 -45.865475
-23.222590
-23.222588
-23.222586
-23.222584
-23.222582
-23.222580
-23.222578
-23.222576
-23.222574Ponto de referência
SPPA
Círculo de referência (1 m)
-0.83 -0.16 0.52 1.19
-1.24
-0.44
0.35
1.14
FIGURA 5.3 – Tomada de dados 1, onde a aquisicao foi realizada a 20m de distancia doponto 2 da Tabela 4.1, marcado com + no centro do cırculo.
A Figura 5.4 mostra o resultado para a tomada de dados 2, onde e possıvel verificar
que o ponto de referencia esta dentro dos limites da estatıstica da tomada de dados. Os
resultados mostrados na Figura 5.3 e 5.4 demonstram o pequeno erro de posicao para as
duas tomadas de dados.
-45.865495 -45.865490 -45.865485 -45.865480 -45.865475-23.222595
-23.222590
-23.222585
-23.222580
-23.222575
Ponto de referência
SPPA
Círculo de referência (1 m)
-0.72 0.07 0.87 1.66
-0.58
0.26
1.10
1.94
FIGURA 5.4 – Tomada de dados 2, onde a aquisicao foi realizada a 25m de distancia doponto 2 da Tabela 4.1, marcado com + no centro do cırculo.

CAPITULO 5. CORRECAO DO GPS - TEREZA 66
Foram feitos os calculos das estatısticas para as duas tomadas de dados e sao mostradas
na Tabela 5.2 os dados para latitude e longitude. Foi verificado uma diminuicao nos erros
de tendencia, 91.1% para a latitude e, 61.8% para a longitude, ambos para a tomada 1, que
foi o pior caso. Houve tambem uma variacao nos valores dos desvios-padrao, porem esse
valor pode ter seu valor alterado por razoes climaticas, nao necessariamente em funcao
do Tereza.
TABELA 5.2 – Valor dos erros e desvios-padrao da media, para latitude e longitude, dasduas tomadas de dados em (◦).
Tomada Latitude Longitudeεmedio (◦) σm (◦) εmedio (◦) σm (◦)
1 1.65e-06 5.75e-08 -5.08e-06 5.51e-082 3.53e-06 6.00e-08 -7.48e-08 8.20e-08
Na Tabela 5.3 sao mostrados os valores dos erros em metros para as duas tomadas de
dados.
TABELA 5.3 – Valor dos erros e desvios-padrao das duas tomadas de dados em (m).
Tomada εmedio (m) εmax (m) σ (m) σm (m)1 0.58 1.53 0.50 0.012 0.27 1.70 0.66 0.01
Comparando o pior caso da Tabela 5.3 com os valores para o ponto 2 da Tabela 4.2,
foi verificado uma diminuicao relativa de 71.8% do valor da tendencia e o erro maximo
diminuiu 73.0%. Desta forma foi verificado a diminuicao do erro de tendencia com a
insercao do Tereza no ciclo das leituras.
Aplicando o maior valor de tendencia da Tabela 5.3, 0.58m, em conjunto com valor
de δrfuturo da Tabela 4.5, 1.53m, na Equacao 4.3 o valor do erro instrumental e igual a
1.35m. Este valor corresponde a um erro para a leitura do VOR, em uma trajetoria de
0.5NM , de 0.09◦.
Este valor e semelhante que o valor corrigido, utilizando pos-processamento da Se-
cao 4.1.3, que foi de 1.72m e 0.11◦. Isto mostra que o compensador proposto teve seu
comportamento conforme o esperado, minimizando o erro de tendencia do SPPA.

6 VOR
O VOR e um facilitador de voo, capaz de fornecer a referencia ao norte de uma
estacao VOR sintonizada (NAVIGATION. . . , 2016). Esta referencia, tambem conhecida
como azimute, e o angulo (θ) entre a estacao e a aeronave. Ao se tomar os valores inteiros
de θ, sao formadas radiais que funcionam como vias, sendo delimitadas pelo angulo inteiro
em relacao ao norte, ou seja, sao 360 vias tendo o valor crescendo em sentido horario a
partir do Norte.
Periodicamente as estacoes de VOR devem passar por inspecao, para garantir que
as aeronaves nela sintonizadas tenham a referencia com fidelidade(ICAO, 2000). Para
realizar a inspecao, na atualidade, e utilizada em territorio brasileiro uma aeronave de
medio porte(FAB, 2017), que envolve uma operacao complexa, desde pessoal com alto
grau de especialidade, ate a necessidade de entrada no espaco aereo-segregado.
Devido a esta alta complexidade, esta sendo conduzido o estudo da viabilidade de
uso de RPA’s para inspecao em voo. Aqui, trabalhamos com a proposta do uso de um
RPA, com PA comercial, executando uma trajetoria pre-determinada, em torno da estacao
VOR a fim de realizar a inspecao. Para demostrar a viabilidade dessa substituicao, foram
realizados testes em HIL, a fim de determinar o raio e a quantidade de voltas em torno
da estacao para minimizar os erros de leitura.
6.1 Normatizacao e conceito do estudo
Para a verificacao de uma estacao VOR, devem ser levados em consideracao quatro
tipos de erros, alinhamento e os erros de modulacao, bend, roughness e scalloping (ICAO,
2000). Estes erros tem valores de tolerancia ao erro diferentes (AERONAUTICA, 2017):
Alinhamento – Erro com valor invariante no tempo. Este erro tem tolerancia de
±2.0◦ (AERONAUTICA, 2017).
Bend – Erro periodico de frequencia baixa. A tolerancia a este erro e de ±3.5◦
(AERONAUTICA, 2017).

CAPITULO 6. VOR 68
Roughness – Erro brusco, nao cadenciado, como uma via esburacada. A tolerancia
a este erro e de ±3.0◦ (AERONAUTICA, 2017).
Scalloping – Erro periodico de frequencia elevada, a tolerancia a este erro e de ±3.0◦
(AERONAUTICA, 2017).
Os erros de bend, roughness e, scalloping ocorrem devido a fatores geograficos como,
topologia da regiao, torres de celular e edificacoes. Estes tres erros afetam a qualidade
da via aerea e, dependendo de sua dimensao, podem tornar a radial, ou um conjunto de
radiais, nao navegaveis. Estes fatores fazem com que o modelamento destes erros seja
complexo. Tendo em vista isto, quando os ensaios forem executados estes erros devem
ser levados em consideracao (GREVING et al., 2014). Deste modo, apesar deste trabalho
ter como objeto de maior interesse a determinacao do erro de alinhamento nas estacoes
VOR, tambem foi feita a insercao de erros de modulacao, como modelo arbitrario, mas
representativo dos erros em questao.
Para determinar o erro de desalinhamento foi desenvolvido um procedimento para a
aquisicao e analise dos dados. Segundo a norma (ICAO, 2000), o erro de desalinhamento e
a media aritmetica dos erros absolutos das 360 radiais. A Figura 6.1 mostra as regioes de
interesse desse trabalho. A delimitacao dessas regioes e muito importante pois, e baseado
no entendimento delas todo o algoritmo desenvolvido.
Centro da radial
Limite da radialLargura da radialRegião de decisão
Raio
FIGURA 6.1 – Regioes de interesse da analise do VOR, largura, centro, limite da radiale regiao de decisao.

CAPITULO 6. VOR 69
Raio(R) - Distancia entre o VOR e a aeronave. As outras quatro componentes mos-
tradas na Figura 6.1, largura, centro, limite e regiao de decisao, sao variaveis em funcao
do raio. Desta forma, ao se determinar o valor do raio da trajetoria todos os outros
parametros sao determinados por consequencia.
Largura(w) - A largura da radial e dada em funcao do raio da trajetoria. A Equacao
6.1 mostra essa dependencia. Tendo o comprimento da circunferencia sendo descrito em
funcao do raio, e feita a divisao pelas 360 radias para encontrar a largura da radial.
w =2.π.R
360◦ (6.1)
Centro - O centro da radial e definido como a linha que parte da origem e vai ate o raio
de alcance da estacao e tem o azimute como o valor intermediario entre as duas radiais
adjacentes.
Limite - O limite da radial e a linha que, partindo da origem, possui o valor de azimute
inteiro.
Regiao de decisao (rgn) - Esta regiao e onde ocorre a aquisicao dos dados do algoritmo.
Ela ocorre em torno da linha limite com um delta para cada lado como na Equacao 6.2,
onde ∆r e o valor que esta ligado a acuracia do sistema.
rgn = limite± ∆r (6.2)
Para determinar o valor medio da radial foi criado, no codigo, uma rotina que e
responsavel por tomar a decisao dos pontos a serem armazenados. Sao armazenados
os pontos proximos aos limites de cada radial, desta forma, em torno da radial inteira, e
gerada uma regiao de decisao de ±0.2◦. Essa regiao foi descrita para levar em consideracao
a taxa de aquisicao do SPPA. Apos essa rotina, sao calculados a media e o desvio padrao
para cada um dos 360 conjuntos de dados adquiridos para a comparacao com os valores
de referencia.
6.1.1 Calculos dos erros
Para dar inıcio a analise dos erros, primeiramente, sera definido a forma de calculo
dos erros, desvios-padrao e as ferramentas criadas para isso.
Tendo uma grandeza modelada matematicamente, um valor assumido como verda-
deiro, esse valor pode ser utilizado como referencia para o estudo dos erros (CRUZ et al.,
2005). O erro pode ser definido como a diferenca entre o valor modelado e o valor lido,

CAPITULO 6. VOR 70
como mostra a Equacao 6.3 (JUNIOR et al., 2013).
ε = valorlido − valormodelado (6.3)
Ao executar a leitura de uma grandeza, e possıvel que esse valor nao seja exatamente
o mesmo da medicao anterior, essa diferenca pode estar ligada a diversos fatores, como
ambiente, oscilacao na fonte de energia, entre outros diversos fatores. Dessa forma e
necessario realizar diversas leituras para ter um bom modelo estatıstico do erro (CRUZ et
al., 2005).
Para realizar o estudo desses erros, sao utilizados os valores de media (x) e desvio-
padrao da media (σm), como nas Equacoes 6.4 e 6.5, respectivamente, calculados em
funcao do numero N de medidas realizadas para a populacao de medidas x. Por simplifi-
cacao, pode-se assumir que o erro aleatorio tem seu valor igual ao desvio-padrao da media
(CRUZ et al., 2005).
x =1
N
N∑i=1
xi (6.4)
σm =
√√√√ N∑i=1
(xi − x)2
N(N − 1)(6.5)
Desta forma, e necessario definir o modelamento indireto do valor do VOR, que e
dependente da posicao onde o receptor esta em relacao a estacao VOR. O valor do VOR
e dado pelo angulo formado entre o ponto geodesico da estacao VOR e o ponto geodesico
do receptor.
6.1.1.1 Geracao da referencia
Para a utilizacao da funcao azimuth para o modelamento da leitura do VOR, deve-
se realizar uma alteracao na Equacao 3.6, onde e inserida uma constante de valor 360◦.
Esta alteracao e necessaria para a adequacao da saıda da funcao azimuth com as leituras
do VOR. Equacao 6.6 mostra como e o modelo para a determinacao do valor de VOR
modelado (θmodelado), em funcao da posicao do receptor e da estacao VOR.
θmodelado = 360◦ − azimuth(latvor, lonvor, latrecp, lonrecp) − δmag (6.6)
Apos a determinacao do valor, e realizado o condicionamento do resultado. Esta
correcao deve ser realizada devido as radiais 0 e 359, que estao em uma regiao onde ha uma

CAPITULO 6. VOR 71
descontinuidade. Desta forma, os valores maiores ou iguais a 359.5◦ devem ser tratados,
para possibilitar a leitura da regiao de decisao da radial 0. Neste caso, para o valor final
de θmodelado e necessario subtrair 360◦ do valor θmodelado, calculado anteriormente. Assim,
o valor deve ser de tal forma que −0.5◦ < θmodelado ≤ 359.5◦. Desta forma, quando o
θmodelado for comparado com um valor proximo aos limites de 0◦ e 360◦, o resultado nao
tera uma interpretacao erronea. Apos este procedimento, o valor θmodelado esta definido e
podera ser utilizado para comparacao com o valor do θlido.
6.1.1.2 Decisao de leitura
Considere a regiao de decisao, indicada na Figura 6.1. Para a leitura do sinal do VOR
foi criada uma regiao de leitura, tao estreita quanto se queira. Foi fixado o valor de ±0.2◦
para essa regiao. Este valor deve ser menor que 0.5◦, para nao ultrapassar o limite do
centro da radial. Esta janela ira garantir que diversas amostras sejam colhidas a cada
passagem pela radial.
A rotina de decisao le todos os valores recebidos pelo VOR. Porem, somente sao
armazenados os dados no interior da regiao de decisao. Nesta regiao sao armazenados os
valores de latitude e longitude do receptor e o sinal lido pelo VOR. O conjunto de dados
armazenados sera utilizado para a comparacao com os valores de referencia e, assim, gerar
a estatıstica de cada radial.
6.1.1.3 Determinacao dos erros
A cada volta dada em torno do VOR, quando a aeronave passa em cada uma das 360
regioes de decisao, sao armazenados os dados referentes ao posicionamento da aeronave,
dados em latitude e longitude, e as leituras de VOR recebidas.
Tendo a posicao da aeronave e possıvel determinar o valor de referencia para aquela
medicao. Assim, substituindo na Equacao 6.3 o valor recebido do VOR, valorlido, e o valor
de referencia, valormodelado, e possıvel determinar o erro de cada radial. Para determinacao
do desalinhamento do VOR e feito o calculo da media dos erros das 360 radiais.
6.2 Erros em funcao da missao
Alguns fatores devem ser levados em consideracao para a determinacao da melhor
forma de execucao da missao, como o raio e a quantidade de voltas, a fim de maximizar o
custo-benefıcio do projeto. A execucao de missoes aereas tem limitacoes quanto a tempo
de voo, que esta ligado diretamente a quantidade de combustıvel, ou bateria, disponıvel,
a velocidade e a carga de voo.

CAPITULO 6. VOR 72
Tendo em vista essas restricoes, foram propostos dois ensaios, um para a determinacao
do raio e outro para a determinacao do numero de voltas. Estes ensaios possibilitam rea-
lizar determinacao do ponto onde o erro de desalinhamento do VOR permanece contınuo
ou tem pouca variacao. Estes resultados serao utilizados para a definicao dos parametros
da missao de verificacao do alinhamento do VOR.
6.2.1 Erro de desalinhamento do VOR em funcao do raio
Devido a taxa de aquisicao do sistema de posicionamento e a largura da regiao de
decisao, o numero de amostras para cada radial varia em funcao do raio da trajetoria.
Desta forma, e razoavel supor que o erro tambem varie em funcao do raio.
Para se estudar como se comportam os erros, em funcao do raio de trajetoria execu-
tado pela aeronave, foram construıdas seis trajetorias, com raios variando entre 0.25NM
(463m) e 1.5NM (2778m). O numero de WP foi deixado fixo em 120 para todos os casos,
e todas as missoes foram desenvolvidas procedendo em duas voltas em torno da estacao
VOR.
Apos executar as seis trajetorias propostas, foram obtidos os erros de desalinhamento
conforme mostrados na Tabela 6.1. Assim, foi determinado o comportamento do erro em
funcao do raio da trajetoria, para a determinacao do menor raio onde o erro e minimizado.
O valor de εmax corresponde ao maior erro entre as 360 radiais e o valor εmedio corresponde
ao valor do erro de desalinhamento da estacao, calculado pela media dos erros das 360
radiais.
TABELA 6.1 – Erro de desalinhamento do VOR em funcao do raio da trajetoria
Raio (NM) Raio (m) εmax (◦) εmedio (◦)0.25 463 0.072 ±0.12 0.02 ±0.000.50 926 0.033 ±0.09 0.01 ±0.000.75 1389 0.030 ±0.07 0.01 ±0.001.00 1852 0.028 ±0.06 0.01 ±0.001.25 2315 0.032 ±0.05 0.01 ±0.001.50 2778 0.030 ±0.05 0.01 ±0.00
As Figuras 6.2 e 6.3 mostram, respectivamente, o erro maximo e o erro medio da
medida do alinhamento do VOR em funcao do raio da trajetoria.
Desta forma, pode-se determinar o valor do raio da trajetoria como sendo o valor
calculado na Secao 3.1. Sendo determinado o valor do raio mınimo em 859.51m (0.46NM)
e verificando a pouca variacao no valor dos erros com o aumento do raio, sera utilizado
o valor de 926m (0.50NM) para os ensaios seguintes. Desta forma sao obedecidos os
requisitos apresentados na Secao 3.1.

CAPITULO 6. VOR 73
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
0.02
0.03
0.04
0.05
0.06
0.07
0.08
FIGURA 6.2 – Maior erro em funcao do raio da trajetoria. Notasse um decrescimento dovalor do erro ate o raio mınimo calculado e uma baixa variacao apos este valor.
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
0.01
0.015
0.02
0.025
FIGURA 6.3 – Erro medio em funcao do raio da trajetoria. Notasse uma baixa variacaoapos o raio mınimo calculado.
6.2.2 Erro em funcao do numero de voltas
Foi feito tambem um ensaio para determinar a quantidade de voltas necessarias para
realizar a verificacao do VOR. Foi fixado o raio da trajetoria em 926m (0.50NM) e foram
executadas seis voltas em torno da estacao VOR. Desta forma foi feito o modelamento
dos erros em funcao do numero de voltas dadas, como descrito na Tabela 6.2. O valor de
εmax corresponde ao maior erro entre as 360 radiais e o valor εmedio corresponde ao valor

CAPITULO 6. VOR 74
do erro de desalinhamento da estacao, calculado pela media dos erros das 360 radiais.
TABELA 6.2 – Erro de desalinhamento do VOR em funcao do numero de voltas para oraio de 926m (0.5NM)
Voltas εmax (◦) εmedio (◦)1 0.07 ± 0.03 0.02 ± 0.002 0.06 ± 0.02 0.02 ± 0.003 0.05 ±0.02 0.01 ±0.004 0.04 ±0.01 0.01 ±0.005 0.04 ±0.01 0.01 ±0.006 0.04 ±0.01 0.01 ±0.00
As Figuras 6.4 e 6.5 mostram o comportamento dos erros maximo e erros medios,
respectivamente, em funcao do numero de voltas. Porem deve ser levado em consideracao
que, cada volta demora aproximadamente 9min fazendo com que a autonomia de voo do
RPA fique comprometida com o maior numero de voltas.
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
0.03
0.032
0.034
0.036
0.038
0.04
0.042
0.044
FIGURA 6.4 – Erro maximo em funcao no numero de voltas. Pode-se notar o decresci-mento ate a terceira volta e uma pouca variacao apos ela, por isso para o melhor custo-benefıcio esse sera o numero de voltas escolhido.
E possıvel verificar a diminuicao do erro conforme aumenta o numero de voltas. Apos
a segunda volta, o erro tem pouca variacao. Devido a isso e visando a autonomia de voo,
sera fixado este valor para o numero de voltas da missao.

CAPITULO 6. VOR 75
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
0.0112
0.0114
0.0116
0.0118
0.012
0.0122
0.0124
FIGURA 6.5 – Erro medio em funcao no numero de voltas. De forma semelhante ao erromaximo, o melhor custo-benefıcio esta proximo a quarta volta, corroborando a escolhadela.
6.3 Verificacao VOR
Para realizar a simulacao HIL de uma estacao VOR serao utilizados todos os conceitos
abordados neste trabalho. Foram definidos os parametros da trajetoria da inspecao com
raio de 0.5NM (926m), e tres o numero de voltas a serem realizadas. A altitude esta-
belecida em 90m corresponde a um angulo de elevacao de 5.5◦, para o raio determinado,
estando dentro dos limites, entre 4◦ e 6◦, estabelecidos pela norma (AERONAUTICA, 2017).
A Figura 6.6 mostra o fluxo do processamento das informacoes no codigo implementado,
onde e possıvel ver onde sao inseridos os erros de posicionamento de leituras do VOR.
Este bloco faz parte da plataforma HIL mostrada na Fig. 2.2.
Para os erros de posicionamento foram inseridos dois tipos de valores, um valor fixo
(ε tend) simulando um erro de tendencia e um valor aleatorio (ε ale) simulando um erro
de dispersao das leituras. Estes erros aditivos foram mesclados em um fator de erro para a
Latitude, ε Lat= ε tendLat+ε aleLat, e um para a Longitude, ε Lon= ε tendLon+ε aleLon.
Para as leituras da estacao VOR, foram inseridos dois tipos de erros. Um erro cor-
responde ao desalinhamento da estacao, este erro tem o valor constante para todas as
leituras. Outro erro inserido foi o erro que simula erros de modulacao, ou dispersao do
sinal, este erro simula erros causados pela geografia da regiao. Estes dois erros foram
mesclados em um fator ε VOR.
Para a determinacao dos erros das radiais, ε radiais, o sistema calcula a diferenca
entre o valor de referencia e a media das leituras durante a missao. Isto gera um valor de

CAPITULO 6. VOR 76
Data Logger
Processamento .
(Lat, Long, Alt, VOR) Erros
Inserção de erros
posicionamento
Inserção de erros
no sinal do VOR
Cálculo da
referência
Cálculo dos erros
das radiais
Cálculo do erro de
desalinhamento do
VOR
(Lat, Long)
(VOR)
(Lat + ε_Lat , Long + ε_Long)
(VOR + ε_VOR)
(Referência)
(ε_radiais)
Tela
FIGURA 6.6 – Fluxograma do codigo de processamento da missao. Este bloco esta contidono HIL mostrado na Fig. 2.2
erro para cada radial e e calculada a media destes 360 valores para determinar o erro da
estacao. Para os testes, foram determinados o maior erro entre as radiais e a radial onde
ele se encontra, e o erro de desalinhamento da estacao.
Para isso foram realizados um teste sem erros, utilizado como referencia, e outros qua-
tro com a insercao de erros, a fim de tornar os experimentos mais proximos da realidade.
Para adequacao destes dados ao sistema de posicionamento utilizado nos testes, foram
inseridos os erros de tendencia e desvio-padrao verificados na Secao 5.3. No sinal da es-
tacao VOR foram inseridos dois tipos de erro, um erro de desalinhamento e um erro de
modulacao. Apesar de o erro de modulacao nao estar no escopo deste trabalho, a insercao
deste erro serve para demonstrar o comportamento do sistema, quando for executado fora
do HIL (GREVING et al., 2014). A Tabela 6.3 mostra como foram distribuıdos os erros nos
testes realizados.
TABELA 6.3 – Apresentacao dos erros inseridos no sistema para cada um dos testes.
Erros inseridosε Lat e ε Lon ε VOR
Teste Posicionamento (SPPA) Alinhamento (VOR) Modulacao (VOR)1 - - -2 x - -3 x x -4 x - x5 x x x

CAPITULO 6. VOR 77
6.3.1 Erro de modulacao no sinal do VOR
Apesar de nao estar no escopo deste trabalho, a analise do comportamento do sistema
com erros de modulacao e de suma importancia, pois estes erros podem influenciar na
execucao da rotina (GREVING et al., 2014). O modelo destes erros nao e conhecido porem, a
norma (AERONAUTICA, 2017) informa algumas caracterısticas destes erros de modulacao,
como periodicidade e velocidade das mudancas dos valores dos erros.
Foi criado um erro senoidal em funcao da radial, semelhante ao erro de curvatura, bend,
e um erro aleatorio, semelhante ao erro de rugosidade, roughness, ambos limitados a uma
faixa de radiais. Apesar de nao se estar usando modelos de tais erros, considera-se que o
sinal gerado e uma boa aproximacao neste estudo de viabilidade. A Figura 6.7 mostra o
formato dos erros de modulacao inseridos nas leituras do VOR, juntamente com os limites
estabelecidos pela norma (ICAO, 2000). Apesar de os dois erros mostrados estarem em
conformidade com a norma, como os erros podem se sobrepor, podera haver um erro a
cima do erro bend, que tem a maior tolerancia ao erro, como mostra a Figura 6.8.
0.000
0.003
0.006
0.008
0.011
0.014
0.017
0.019
0.022
0.025
0.028
-3.5
0
3.5
0.000
0.003
0.006
0.008
0.011
0.014
0.017
0.019
0.022
0.025
0.028
-3
0
3
FIGURA 6.7 – Exemplos de erros de modulacao, que mostram o formato dos erros inse-ridos nas leituras do VOR, para uma radial especıfica.
Foi gerado um sinal de VOR com os erros de modulacao, limitados a regiao da radial
90. A Figura 6.9 mostra as leituras deste sinal. E possıvel verificar a oscilacao nas leituras
na zona de erro. Neste caso as leituras com erro se misturariam com outras, tornando a
regiao nao confiavel para o uso do VOR.

CAPITULO 6. VOR 78
0.000
0.003
0.006
0.008
0.011
0.014
0.017
0.019
0.022
0.025
0.028
-3.5
0
3.5
FIGURA 6.8 – Exemplo de sobreposicao dos erros de modulacao, onde e visto a extrapo-lacao do erro maximo, mesmo sendo os dois erros conformes a norma.
6.3.2 Teste 1 - Missao de referencia
A Figura 6.10 mostra a trajetoria completa da missao executada. E possıvel visualizar
o formato circular da trajetoria.
Foi verificado nos resultados do teste 1, usado como referencia, que, para este experi-
mento especıfico, a radial 18 possui erro. Porem, ao considerar o desvio-padrao da media,
calculado em ±0.07◦, e possıvel inferir que este valor esta ligado ao erro instrumental.
A Figura 6.11 mostra a regiao onde ocorre a radial de maior erro. E possıvel verificar
o distanciamento da trajetoria executada da trajetoria de referencia, porem isto nao tem
influencia sobre o calculo de erro pois, este valor e dependente somente do angulo entre
o ponto e a estacao VOR. Ao visualizar a radial de maior erro, Figura 6.12, e possıvel
notar o agrupamento e alinhamento dos pontos, isto e devido a nao existencia de erros no
sistema de posicionamento.
6.3.3 Teste 2 - Missao com insercao de erro no sistema de posi-
cionamento
Neste teste foi inserido os erros no sistema de posicionamento, a fim de verificar a
influencia destes erros no calculo dos erros das radiais. A Figura 6.13 mostra a regiao
onde se encontra a radial de maior erro. E possıvel verificar o aumento da dispersao dos
pontos aquisitados devido ao erro aleatorio inserido no sistema. E possıvel notar que
houve a mudanca da radial de maior erro, a mudanca ocorreu da radial 18, teste1, para a

CAPITULO 6. VOR 79
0 50 100 150 200 250 300 350
0
100
200
300
(a)
75 80 85 90 95 100 105 110 115
70
75
80
85
90
95
100
105
110
115
(b)
FIGURA 6.9 – Erros de modulacao inseridos em torno da radial 90. E possıvel ver alinearidade das leituras fora da regiao onde foi inserido os erros, Figura (a). Na Figura(b) e visualizada apenas a regiao onde foi inserido os erros de modulacao, e possıvel veras alteracoes nos valores lidos, que causariam embaralhamento no sinal.
radial 215. Na Figura 6.14 e mostrada a radial de maior erro. E possıvel verificar que o
ponto utilizado como referencia esta dentro da nuvem de pontos.

CAPITULO 6. VOR 80
-1000 -500 0 500 1000
-1000
-500
0
500
1000 Pontos amostrados
FIGURA 6.10 – Trajetoria completa sem a insercao de erros no sistema de posicionamentoe nas leituras de VOR.
6.3.4 Teste 3 - Missao com insercao de erro no sistema de posi-
cionamento e desalinhamento da estacao VOR
Neste teste foi inserido o erro de desalinhamento na estacao. Este erro e gerado
adicionando um valor constante em todas as leituras de VOR. Para este teste, foi inserido
um desalinhamento de 4◦.
A Figura 6.15 mostra a regiao de maior erro para o teste 3. E possıvel verificar que
as leituras da radial continuam espalhadas em uma nuvem de amostras, como no teste
2. Porem, estao deslocadas de quatro radias, o que torna a estacao desalinhada por estar
com desalinhamento acima de 2◦, valor de tolerancia descrito pela norma (ICAO, 2000).
6.3.5 Teste 4 - Missao com insercao de erros no sistema de po-
sicionamento e erro de modulacao no sinal do VOR
Neste teste foram inseridos os erros de posicionamento e de modulacao, simulando
um erro de modulacao em torno da radial 90. Foram inseridos erros de modulacao que

CAPITULO 6. VOR 81
-130 -120 -110 -100 -90
913
914
915
916
917
918
Ponto médio da Radial de
maior erro (Radial 18)
Referência da Radial de
maior erro (Radial 18)
Pontos amostrados da Radial de
maior erro (Radial 18)
Pontos amostrados
Centro de radial
Limite de radial
FIGURA 6.11 – Regiao onde se encontra a radial de maior erro, para a trajetoria dereferencia.
-115 -110 -105
915
915.5
916
916.5
917 Ponto médio da Radial de
maior erro (Radial 18)
Referência da Radial de
maior erro (Radial 18)
Pontos amostrados da Radial de
maior erro (Radial 18)
Pontos amostrados
Centro de radial
Limite de radial
FIGURA 6.12 – Radial de maior erro onde e possıvel ver o agrupamento dos pontosaquisitados.

CAPITULO 6. VOR 82
-190 -180 -170 -160 -150 -140
-912
-911
-910
-909
-908
-907
-906
-905
-904
-903Ponto médio da Radial de
maior erro (Radial 215)
Referência da Radial de
maior erro (Radial 215)
Pontos amostrados da Radial de
maior erro (Radial 215)
Pontos amostrados
Centro de radial
Limite de radial
FIGURA 6.13 – Radial de maior erro onde e possıvel ver o espalhamento dos pontosaquisitados, causado pela insercao de um erro aleatorio no sistema de posicionamento.
-175 -170 -165 -160 -155
-909.5
-909
-908.5
-908
-907.5
-907
-906.5
Ponto médio da Radial de
maior erro (Radial 215)
Referência da Radial de
maior erro (Radial 215)
Pontos amostrados da Radial de
maior erro (Radial 215)
Pontos amostrados
Centro de radial
Limite de radial
FIGURA 6.14 – Regiao da radial de maior erro e radiais vizinhas, com os pontos amos-trados relativos a cada radial, utilizando o erro de posicionamento.

CAPITULO 6. VOR 83
570 580 590 600 610 620
680
690
700
710
720
730 Ponto médio da Radial de
maior erro (Radial 67)
Referência da Radial de
maior erro (Radial 67)
Pontos amostrados da Radial de
maior erro (Radial 67)
Pontos amostrados
Centro de radial
Limite de radial
FIGURA 6.15 – Radial de maior erro, utilizando os erros de posicionamento e de desali-nhamento da estacao VOR.
extrapolam o erro de 3.5◦, a fim de simular um erro acima do valor tolerado. O formato
destes erros inseridos foram mostrados na Figura 6.7. A Figura 6.16 mostra o resultado
para o teste 4. Pode-se notar que houve o espalhamento dos pontos aquisitados para a
radial 104. Houve uma nuvem de pontos localizados dentro da radial 104 e outra nuvem
dentro da radial 116, isto levou a media da radial 104 para a radial 111.
6.3.6 Teste 5 - Missao com insercao de erros no sistema de po-
sicionamento, desalinhamento da estacao VOR e erro de
modulacao no sinal do VOR
Para este teste foram inseridos os mesmos erros do teste 4 e um erro de desalinhamento,
simulando uma estacao VOR com todos os erros descritos neste trabalho. A Figura 6.17
mostra o resultado do teste 5, onde alem do erro de modulacao foi inserido um erro de
desalinhamento de 4◦, e possıvel ver um resultado semelhante ao resultado do teste 4,
apenas rotacionado em 4◦.

CAPITULO 6. VOR 84
840 860 880 900 920
180
200
220
240
260
280
300
320
340
360 Ponto médio da Radial de
maior erro (Radial 104)
Referência da Radial de
maior erro (Radial 104)
Pontos amostrados da Radial de
maior erro (Radial 104)
Pontos amostrados
Centro de radial
Limite de radial
Espalhamento da nuvem de
pontos da radial 104, causado
pelo erro de modulação.
FIGURA 6.16 – Trajetoria com insercao de erros de posicionamento e de modulacao naestacao VOR. E possıvel ver que, devido ao erro de modulacao, o sinal referente a radial104 e recebido em regioes diferentes, fazendo com que a media seja deslocada da referencia.
6.3.7 Resultados
A Tabela 6.4 mostra as saıdas do codigo criado para analisar os ensaios de HIL.
Utilizando o resultado do teste 1, onde nenhum erro foi inserido, como referencia, e possıvel
afirmar que nos testes 2 e 4 a estacao VOR esta alinhada, mesmo com a insercao do erro
de modulacao no teste 4. Nos testes 3 e 5, onde foi inserido o erro de desalinhamento, o
codigo criado foi capaz de detectar a existencia do erro de 4◦.
TABELA 6.4 – Saıda do codigo com os valores para a radial com o maior erro. Em cadateste foi inserido um modelo de erro no sistema, como mostrado na Tabela 6.3.
Radial de maior erro VORTeste Radial Media radial (◦) Erro (m) Desalinhamento (◦) Resultado
1 18 18.04 ±0.07 0.49 ±1.06 0.01 ±0.00 Alinhada2 215 215.06 ±0.07 0.99 ±1.11 0.02 ±0.00 Alinhada3 67 71.06 ±0.07 65.54 ±1.20 3.99 ±0.00 Desalinhada4 104 111.10 ±1.10 114.77 ±17.77 0.17 ±0.04 Alinhada5 104 114.66 ±1.08 172.33 ±17.43 4.02 ±0.03 Desalinhada

CAPITULO 6. VOR 85
800 820 840 860 880 900 920
200
250
300
350
400
Ponto médio da Radial de
maior erro (Radial 104)
Referência da Radial de
maior erro (Radial 104)
Pontos amostrados da Radial de
maior erro (Radial 104)
Pontos amostrados
Centro de radial
Limite de radial
Espalhamento da nuvem de
pontos da radial 104, causado
pelo erro de modulação.
Afastamento da
referência causado pelo
erro de alinhamento.
FIGURA 6.17 – Trajetoria com insercao de erros no sistema de posicionamento, de mo-dulacao e de desalinhamento na estacao VOR. E possıvel ver que, devido ao erro demodulacao, o sinal referente a radial 104 e recebido em regioes diferentes, fazendo comque a media seja deslocada da referencia. Tambem e possıvel notar o desalinhamento, 4◦,inserido.
Estes resultados servem para mostrar que o SPPA e capaz de fornecer o posicionamento
para a inspecao em voo do VOR. Verifica-se que, mesmo com a insercao de erros de
modulacao em uma faixa de radiais, o sistema foi capaz de verificar o alinhamento. A
saıda do codigo tambem mostra as radiais onde possivelmente houve erro de modulacao.
A Tabela 6.5 apresenta a saıda do codigo para um teste especıfico realizado. O operador,
entao e alertado que as radias especificadas podem conter erro de modulacao. Desta
forma, o experimentador tera amparo para a decisao de proceder em uma nova inspecao.
Esta inspecao e realizada de forma especıfica, a fim de confirmar a existencia de erros de
modulacao.

CAPITULO 6. VOR 86
TABELA 6.5 – Saıda do codigo indicando para possıveis erros de modulacao detectados.
Radial Erro(◦)78 9.29 ±0.7179 8.61 ±0.8680 7.981 ±0.7881 7.12 ±0.5782 6.29 ±0.5683 5.61 ±0.5184 4.69 ±0.4485 3.87 ±0.4393 5.18 ±1.3594 4.95 ±1.2495 5.36 ±0.5496 6.10 ±0.5897 6.95 ±0.5398 7.88 ±0.7499 8.67 ±0.74100 9.52 ±0.84101 10.38 ±0.97102 11.18 ±1.12103 11.84 ±1.13104 12.43 ±1.08

7 Conclusao
O foco deste trabalho foi o estudo da viabilidade de realizar missoes de inspecao em
voo de uma estacao VOR com uso de RPA. Para isto foram realizadas diversas etapas a
fim de desenvolver o sistema e realizar testes de conformidade.
O PA utilizado e um equipamento de prateleira, de baixo custo e rapida adaptacao ao
RPA. O uso deste PA possibilita a realizacao de missoes com o uso de WP e, utilizando-
se esta caracterıstica, foi desenvolvida a automatizacao da criacao das missoes. Esta
automatizacao diminui a influencia humana na realizacao das missoes, minimizando erros
e padronizando os resultados. O codigo de automatizacao desenvolvido tambem permite
a criacao das trajetorias para qualquer estacao VOR, pois tem como entrada o ponto
geodesico da VOR, o local de decolagem e a declinacao magnetica local. Esta portabilidade
facilita para pessoas com pouco treinamento realizem o desenvolvimento das missoes de
forma padronizada.
Para verificar se o SPPA, que utiliza um GPS simples e de baixo custo, e capaz
de se adequar a norma, foram desenvolvidos alguns testes estaticos e dinamicos. Estes
testes serviram para determinar erros de tendencia, de dispersao das leituras de posicao
e de distanciamento entre as amostras. A realizacao destes testes so foi possıvel gracas a
disponibilizacao do acesso a dois marcos geodesicos, que se localizam no patio do aeroporto
de Sao Jose dos Campos – SP. Caso nao fosse permitido o acesso a estes pontos nao seria
possıvel, ou seria dificultada, a determinacao do erro de tendencia do sistema. Para os
testes dinamicos, outra vez, foi necessario o auxılio do pessoal da Forca Aerea Brasileira,
onde foi disponibilizado o uso de um DGPS, utilizado em missoes de inspecao, para realizar
a comparacao dos resultados obtidos pelo SPPA. Outro fator que dificultou a obtencao
de melhores resultados, foi a proximidade de um dos pontos aos hangares do aeroporto,
onde foi verificada a diferenca entre os resultados dos dois marcos geodesicos.
Apos ter determinado a existencia e o valor do erro de tendencia para o posiciona-
mento, foi desenvolvido um sistema de correcao, batizado como Tereza, para corrigir este
erro. A ideia do sistema e a interceptacao das leituras do GPS, o tratamento e o envio
para o PA. O envio das informacoes deve ser realizado de tal forma que o PA receba
pacotes de dados da mesma forma que o GPS enviaria, isto faz com que o sistema possa

CAPITULO 7. CONCLUSAO 88
ser utilizado em outras plataformas. Durante a inicializacao do sistema, o dispositivo
deve ser deixado sobre um ponto conhecido, desta forma ele calcula o erro entre o valor
armazenado e a media dos pontos aquisitados. Esta inicializacao em um ponto conhecido
nao e um problema pois, as missoes serao realizadas em aerodromos, onde existem marcos
geodesicos. Apos a inicializacao, todas as leituras sao corrigidas e enviadas para o PA,
com isso o posicionamento tem o erro de tendencia minimizado. Este sistema pode ser
definido como um sistema de DGPS primitivo. O sistema desenvolvido corrige os erros
determinados durante a inicializacao, ja o DGPS corrige tambem erros instantaneos, que
estao ligados a dispersao das estimativas de posicionamento.
De posse dos valores dos erros do SPPA, e possıvel inseri-los nos dados aquisitados
pelo simulador X-Plane, de modo as simulacoes serem ainda mais proximas da realidade.
Foi fechado o laco de controle usando HIL, entre o X-Plane e o PA. Assim o PA controla a
aeronave simulada e o simulador armazena os dados de posicionamento e dados recebidos
pelo VOR simulado, que tambem nao tem erros. Com os dados armazenados e possıvel
realizar diversas analises, inserindo erros da forma que for necessario. Assim foi possıvel
verificar, para o caso sem a insercao de nenhum erro, que o codigo de processamento foi
capaz de determinar que o VOR nao estava desalinhado. Apos isto, foram inseridos erros
de desalinhamento, erros constantes em todas as leituras e erros de modulacao, erros
instantaneos que nao sao o foco do trabalho, mas foram levados em consideracao. Foi
verificado que o sistema e capaz de verificar erros de desalinhamento, mesmo com o uso
de GPS e com o aparecimento de anomalias na recepcao do sinal do VOR.
Os testes realizados para a determinacao dos erros do SPPA foram realizados com
numero limitado de experimentos, quatro no total, para aumentar a precisao desses re-
sultados devem ser realizados mais experimentos, realizando testes em dias e horarios
diferentes. Porem com o uso do compensador de erro Tereza, os erros sao minimizados a
ponto de adequar o sistema a norma (ICAO, 2000).
Apos realizar estes diversos testes na plataforma proposta e possıvel afirmar que e
possıvel realizar a inspecao em voo do VOR com o uso do um RPA, mesmo utilizando um
sistema de baixo custo. Resultados melhores sao esperados no caso do uso de sistemas
mais precisos, como o uso de um DGPS para fornecer a estimativa de posicionamento da
aeronave. O tempo de execucao de uma missao, conforme proposto neste estudo, e de
15 minutos para cada volta em torno do VOR. Assim, em relacao a autonomia para a
execucao da missao, deve-se escolher entre RPA com motor eletrico ou a combustao ou,
ainda, realizar a missao por segmentos.

CAPITULO 7. CONCLUSAO 89
7.1 Trabalhos futuros
O desenvolvimento deste trabalho abriu algumas possibilidades de trabalhos futuros.
O primeiro trabalho futuro e a realizacao destes estudos com uma aeronave real, onde a
pesquisa seria completada e seriam corroboradas as descobertas.
Outro trabalho futuro e a complementacao do sistema Tereza, a fim de completar o
desenvolvimento de um sistema de DGPS de baixo custo. O sistema Tereza e capaz de
corrigir o erro de posicionamento, bias, a partir do valor calculado durante a rotina de
inicializacao. O DGPS e capaz de corrigir de forma dinamica, corrigindo nao somente
o erro de posicionamento inicial, mas tambem erros oriundos as interferencias no sinal
do GPS. O sistema completo seria composto de dois conjuntos, um fixo em um ponto
geodesico conhecido e outro a ser embarcado na aeronave. O conjunto fixo deve ser capaz
de calcular o erro para o ponto conhecido e enviar a correcao, via radio, para o conjunto
movel. Desta forma, a estimativa de posicionamento da aeronave tem o erro minimizado
da mesma forma que os sistemas DGPS comerciais.
Outra possibilidade aberta e utilizar o conhecimento adquirido no desenvolvimento do
sistema Tereza, para se propor uma nova facilidade/operacionalidade para a ferramenta
HIL. Esta nova funcionalidade seria a insercao de dados GPS simulados que foram gerados
a partir de uma modificacao do sistema Tereza, esses dados seriam enviados ao PA da
plataforma HIL. Desta forma e possıvel verificar o comportamento do sistema em testes
com valores de GPS conhecidos.

Referencias
AERONAUTICA, B. C. da. Sistemas de aeronaves remotamente pilotadas e o acesso aoespaco aereo brasileiro. Comando da Aeronautica, 2016.
AERONAUTICA, B. C. da. Manual brasileiro de inspecao em voo. Comando daAeronautica, 2017.
ALCANTARA, J. R.; MUXI, C. B.; LLORENS, E. P. Navaid flight inspectionoptimization with uas technology. In: International Symposium on PrecisionApproach and Performance Based Navigation 2008. [S.l.: s.n.], 2008.
BARRADO, C.; RAMIREZ, J.; PEREZ-BATLLE, M.; SANTAMARIA, E.; PRATS, X.;PASTOR, E. Remote flight inspection using unmanned aircraft. Journal of Aircraft,American Institute of Aeronautics and Astronautics, v. 50, n. 1, p. 38–46, 2013.
BITTAR, A.; FIGUEREIDO, H. V.; GUIMARAES, P. A.; MENDES, A. C. Guidancesoftware-in-the-loop simulation using x-plane and simulink for uavs. In: IEEE.Unmanned Aircraft Systems (ICUAS), 2014 International Conference on.[S.l.], 2014. p. 993–1002.
BITTAR, A.; VITZILAIOS, N. I.; RUTHERFORD, M. J.; VALAVANIS, K. P. Anintegrated framework for cooperative ground and aerial vehicle missions utilizing matlaband x-plane. In: IEEE. Systems Conference (SysCon), 2015 9th Annual IEEEInternational. [S.l.], 2015. p. 495–500.
CETIN, E.; KUTAY, A. T. Automatic landing flare control design by model-followingcontrol and flight test on x-plane flight simulator. In: IEEE. Mechanical andAerospace Engineering (ICMAE), 2016 7th International Conference on.[S.l.], 2016. p. 416–420.
CRUZ, J. M. R.; KOCHE, N. M. de L.; LOGRADO, P. G. Fısica 1 experimental. 2.ed. Instituto de Fısica - UnB, 2005.
DEAR, R. M.; MITCHELL, C. N. Gps interfrequency biases and total electron contenterrors in ionospheric imaging over europe. Radio Science, v. 41, n. 06, p. 1–7, Dec2006. ISSN 1944-799X.
DECEA, D. de Controle do E. A. (IU-50) LEGACY 500: surpreenda-se com onovo Laboratorio Voador do GEIV. Set 2016. Disponıvel em:<https://www.decea.gov.br/blog/?p=721>.
REFERENCIAS 91
DEUS, R. A. da Silva Gomes de; RAMOS, R. P. da S.; ALEXANDRE, F. da S.;GOMES, D. D. M. O uso de veıculos aereos nao tripulados (VANT) para geracao dedados geocartograficos na universidade de pernambuco - campus garanhuns. In: OsDesafios da Geografia Fısica na Fronteira do Conhecimento. INSTITUTO DEGEOCIENCIAS - UNICAMP, 2017. p. 5543–5551. Disponıvel em:<https://doi.org/10.20396/sbgfa.v1i2017.2216>.
DU, X.; DU, D.; WANG, K. Position accuracy evaluation of gps receiver under smalluav flight environment. In: 2009 9th International Conference on ElectronicMeasurement Instruments. [S.l.: s.n.], 2009. p. 2–29–2–33.
FAB, F. A. B. Aeronave-laboratorio IU-50 completa seis meses de atividadesna FAB. Feb 2017. Disponıvel em:<http://www.fab.mil.br/noticias/mostra/29111/OPERACIONAL -Aeronave-laboratorio IU-50 completa seis meses de atividades na FAB>.
FELIZARDO, L. F. Integracao de software e hardware no desenvolvimento de vantsautonomos de baixo custo. 2016.
GOOGLE. Google Maps. Google, Mai 2018. Disponıvel em:<https://www.google.com.br/maps/@-23.2439616,-45.8612218,2391m/data=!3m1!1e3>.
GOOGLE. Google Maps. Google, Mai 2018. Disponıvel em:<https://www.google.com.br/maps/@-23.0088424,-47.1377421,2391m/data=!3m1!1e3>.
GOOGLE. Google Maps. Google, Mai 2018. Disponıvel em:<https://www.google.com.br/maps/@-23.2204012,-45.8678347,843m/data=!3m1!1e3>.
GOOGLE. Google Maps. Google, Mai 2018. Disponıvel em:<https://www.google.com.br/maps/@-23.2229736,-45.8649361,209m/data=!3m1!1e3>.
GREVING, G.; BIERMANN, W.-D.; MUNDT, R. Advanced theory and results ofclassical system simulations and related flight inspection. IFIS, 2014.
GREVING, G.; SPOHNHEIMER, L. Current issues in flight inspection measurements.In: BEIJING, CHINA: ICASC. 16th International Flight Inspection Symposiumproceedings. [S.l.], 2010. p. 183–192.
ICAO. Doc 8071 vol i (2000). Manual on Testing of Radio Navigation Aids, v. 1,2000.
IZADI, M.; SANYAL, A. K.; BEARD, R.; BAI, H. Gps-denied relative motionestimation for fixed-wing uav using the variational pose estimator. In: 2015 54th IEEEConference on Decision and Control (CDC). [S.l.: s.n.], 2015. p. 2152–2157.
JUNIOR, P. L.; SILVA, M. T. X.; SILVEIRA, F. L. da; VEIT, E. A. Laboratorio deMecanica - Subsıdios para o Ensino de Fısica Experimental. Instituto de Fısica- UFRGS, 2013.

REFERENCIAS 92
KAMARUDIN, S. S.; TAHAR, K. N. Investigation on uav positioning inertialnavigation system. In: 2015 IEEE Conference on Systems, Process and Control(ICSPC). [S.l.: s.n.], 2015. p. 96–100.
KAPLAN, E. D.; HEGARTY, C. J. Understanding GPS: principles andapplications. [S.l.]: Artech House, 2006.
KUMAR, M. World geodetic system 1984: A modern and accurate global referenceframe. Marine Geodesy, Taylor & Francis, v. 12, n. 2, p. 117–126, 1988.
KUROSWISKI, A. R. Navegacao Aerea Autonoma Baseada Em VisaoComputacional. 2017. Trabalho de Conclusao de Curso. (Graduacao em EngenhariaEletronica), Instituto Tecnologico de Aeronautica, Sao Jose dos Campos, Brasil.
LIM, C. H.; LIM, T. S.; KOO, V. C. A mems based, low cost gps-aided ins for uavmotion sensing. In: 2014 IEEE/ASME International Conference on AdvancedIntelligent Mechatronics. [S.l.: s.n.], 2014. p. 576–581. ISSN 2159-6247.
LU, P.; GENG, Q. Real-time simulation system for uav based on matlab/simulink. In:IEEE. Computing, Control and Industrial Engineering (CCIE), 2011 IEEE2nd International Conference on. [S.l.], 2011. v. 1, p. 399–404.
MCKEEL, P. D.; CRAYMER, L. G. Calibration, flight inspection and performanceassurance of vor/dme/vortac facilities. IEEE Transactions on Aerospace andNavigational Electronics, v. 12, n. 1, p. 15–25, March 1965. ISSN 0096-1957.
NAVIGATION instrument - VOR. IVAO, 2016. Disponıvel em: <https://www.ivao-.aero/training/documentation/books/PP ADC Navigation VOR.pdf>.
NOVAK, A.; KEVICKY, D. Flight inspection of aircraft at the university of zilina.Archives of Transport System Telematics, v. 3, p. 14–18, 2010.
NOVATEL. DL-V3 User Manual. NovAtel, Jul 2009. Disponıvel em:<https://www.novatel.com/assets/Documents/Manuals/om-20000119.pdf>.
PANICE, G.; LUONGO, S.; GIGANTE, G.; PASCARELLA, D.; BENEDETTO, C. D.;VOZELLA, A.; PESCAPe, A. A svm-based detection approach for gps spoofing attacksto uav. In: 2017 23rd International Conference on Automation andComputing (ICAC). [S.l.: s.n.], 2017. p. 1–11.
PARASURAMAN, R.; RILEY, V. Humans and automation: Use, misuse, disuse, abuse.Human Factors, v. 39, n. 2, p. 230–253, 1997. Disponıvel em:<https://doi.org/10.1518/001872097778543886>.
QVIST, I. Remote flight inspection of enroute facilities. 14th International FlightInspection Symposium, Jun 2016. Disponıvel em: <http://www.icasc.co/sites/faa-/uploads/documents/resources/14th int flight inspection symposium-/Remote Flight Inspection of Enroute Facilities.pdf>.
RESARCH, L. X Plane 10. Laminar Resarch, 2011. Disponıvel em:<http://www.x-plane.com/support/manuals/>.

REFERENCIAS 93
ROHRER, J. P. Effects of gps error on geographic routing. In: 2017 26thInternational Conference on Computer Communication and Networks(ICCCN). [S.l.: s.n.], 2017. p. 1–2.
SANTAMARIA, E.; PEREZ, M.; RAMIREZ, J.; BARRADO, C.; PASTOR, E. Missionformalism for uas based navaid flight inspections. In: 9th AIAA AviationTechnology, Integration, and Operations Conference (ATIO) and AircraftNoise and Emissions Reduction Symposium (ANERS). [S.l.: s.n.], 2009. p. 7095.
SILVA, W. F.; SILVA, L. S.; MALTA, E. A.; GONDIM, R. de O. Avaliacao de uso deveıculo aereo nao tripulado—vant em atividades de fiscalizacao da agencia nacional deaguas.
SKULSTAD, R.; SYVERSEN, C. L.; MERZ, M.; SOKOLOVA, N.; FOSSEN, T. I.;JOHANSEN, T. A. Net recovery of uav with single-frequency rtk gps. In: 2015 IEEEAerospace Conference. [S.l.: s.n.], 2015. p. 1–10. ISSN 1095-323X.
UBLOX. NEO-M8. UBlox, Ago 2016. Disponıvel em:<https://www.u-blox.com/en/product/neo-m8-series>.
WEDE, T. The future of the flight inspection world a crystal ball look into changesahead, based on current trends and developments. In: 14th ifis (int’l flightinspection symposium). [S.l.: s.n.], 2006. v. 68.
YOUNG, S.; WELLS, A. Aeroportos - 6.ed.: Planejamento e Gestao. BookmanEditora, 2014. ISBN 9788582602065. Disponıvel em:<https://books.google.com.br/books?id=JmDiAwAAQBAJ>.

FOLHA DE REGISTRO DO DOCUMENTO
1. CLASSIFICAO/TIPO 2. DATA 3. DOCUMENTO N 4. N DE PGINAS
DM 27 de Setembro de 2018 DCTA/ITA/DM-082/2018 93
5. TTULO E SUBTTULO:
Analise da viabilidade do uso de RPA em inspecao em voo do VOR
6. AUTOR(ES):
Diogo de Oliveira Costa
7. INSTITUIO(ES)/RGO(S) INTERNO(S)/DIVISO(ES):
Instituto Tecnologico de Aeronautica – ITA
8. PALAVRAS-CHAVE SUGERIDAS PELO AUTOR:
VOR; Hardware In the Loop; RPA; Inspecao em Voo; Piloto Automatico
9. PALAVRAS-CHAVE RESULTANTES DE INDEXAO:
Aeronave nao-tripulada; Simulacao em hardware in-the-loop; Pilotos automaticos; Sistemas de posicionamentoglobal; Analise de viabilidade; Engenharia aeronautica.10. APRESENTAO: (X) Nacional ( ) Internacional
ITA, Sao Jose dos Campos. Curso de Mestrado. Programa de Pos-Graduacao em Engenharia Eletronica eComputacao. Area de Dispositivos e Sistemas Eletronicos. Orientador: Profa. Dra. Neusa Maria Franco deOliveira. Defesa em 24/09/2018. Publicada em 2018.11. RESUMO:
A realizacao deste trabalho teve como motivacao a reducao do alto custo de missoes de inspecao em voo do VHFOmnidirectional Range (VOR), que e uma ferramenta de auxılio a navegacao. Estas missoes sao realizadas emterritorio nacional pelo Grupo Especial de Inspecao em Voo (GEIV) com o uso de uma aeronave de medio porte,fazendo com que haja uma logıstica complexa e de custo elevado. Visando a reducao do custo de inspecao deVOR, foi conduzido o estudo inicial da possibilidade de uso de Remotely-Piloted Aircraft (RPA) nesta inspecao.Na missao de verificacao de alinhamento de uma estacao VOR e procedida uma trajetoria circular em torno destaestacao, realizando a leitura dos sinais emitidos por esta. Com o uso de um RPA e possıvel minimizar este raiodevido ao seu envelope de voo. O uso de um RPA tambem permite a utilizacao de um Piloto Automatico (PA),para realizar a missao de forma padronizada, por meio de WayPoint (WP). A fim de garantir os requisitos danorma, devem ser realizados testes no Sistema de Posicionamento do Piloto Automatico (SPPA). A norma exigeque as leituras recebidas pelo VOR e o posicionamento da aeronave sejam gravados em voo, a norma tambempreve a acuracia das leituras do sistema. Estes testes devem determinar a grandeza dos erros e desvios-padraodas leituras de posicao. Os testes tambem servem para determinar o distanciamento entre as leituras de posicao,que sao dependentes da velocidade do veıculo e da taxa de aquisicao das amostras. Foi criado um compensadorpara minimizar os erros para as leituras de posicao. Este compensador e responsavel e responsavel por receberos dados de posicionamento do receptor do Global Positioning System (GPS), processa-los e enviar ao SPPA.Apos a validacao dos componentes do SPPA do RPA, foi construıda uma plataforma de testes Hardware In theLoop (HIL). O laco de controle e fechado entre o simulador de voo X-Plane e o PA. O uso do HIL aumenta avelocidade na obtencao de resultados e permite a validacao do conceito sem a necessidade de executar voos reais.Foram conduzidos varios testes, incluindo os varios erros que podem influenciar um VOR. Os testes conduzidosna HIL indicam que a inspecao VOR com RPA e possıvel e resulta em respostas corretas quanto a aprovacao ounao do VOR inspecionado.
12. GRAU DE SIGILO:
(X) OSTENSIVO ( ) RESERVADO ( ) SECRETO






![Questoes Do Bloco II - RPA[1]](https://static.fdocumentos.com/doc/165x107/5695d1241a28ab9b02954ed6/questoes-do-bloco-ii-rpa1.jpg)











