CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL LUIZ...
16
__________________________________________________________________ Faculdade de Tecnologia de Garça Deputado “Júlio Julinho Marcondes de Moura” CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL LUIZ ALFREDO STILLI DE SOUZA MARCELO JOSÉ DOS SANTOS ESTEIRA SELECIONADORA COM DESCARREGADOR AUTOMÁTICO GARÇA 2016
Transcript of CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL LUIZ...

__________________________________________________________________
Faculdade de Tecnologia de Garça Deputado “Júlio Julinho Marcondes de Moura”
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
LUIZ ALFREDO STILLI DE SOUZA
MARCELO JOSÉ DOS SANTOS
ESTEIRA SELECIONADORA COM DESCARREGADOR AUTOMÁTICO
GARÇA 2016

__________________________________________________________________
Faculdade de Tecnologia de Garça Deputado “Júlio Julinho Marcondes de Moura”
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
LUIZ ALFREDO STILLI DE SOUZA
MARCELO JOSE DOS SANTOS
ESTEIRA SELECIONADORA COM DESCARREGADOR AUTOMÁTICO
Artigo Científico à Faculdade de Tecnologia de Garça – FATEC, como requisito para a conclusão do Curso de Tecnologia em Mecatrônica Industrial, examinado pela seguinte comissão de professores.
Data da aprovação: / /
__________________________________
Prof. Dr. Ulysses de Barros Fernandes
FATEC Garça
__________________________________
Prof.
FATEC Garça
__________________________________
Prof.
FATEC Garça
GARÇA 2016

1
ESTEIRA SELECIONADORA COM DESCARREGADOR AUTOMÁTICO
Luiz Alfredo Stilli de Souza1
Marcelo Jose dos Santos1
Prof.Dr. Ulysses de Barros Fernandes2
Resumo - O desenvolvimento de Sistemas Automatizados de Produção envolve aspectos que integram componentes tecnológicos, como, microcontroladores, manipuladores robóticos, sensores e efetuadores, os quais são amplamente utilizados nas áreas de atuação da Mecatrônica: mecânica, eletrônica e informática. O protótipo, proposto neste trabalho, consiste em uma esteira selecionadora com descarregador automático. Este descarregador é usado para retirar da esteira, peças fora do padrão pré-determinado pelo projeto. Isso permite evidenciar alta qualidade dos produtos e melhor produtividade; tornando as empresas competitivas em um mercado cada vez mais globalizado, garantindo o crescimento destas e a geração de empregos mais qualificados, melhor remunerados, um ambiente de trabalho seguro, menos exaustivo e sem atividades repetitivas e monótonas.
Palavras-chave: Mecatrônica. Esteira Selecionadora. Descarregador Automático.
Microcontrolador.
Abstract - Development of Production Automated Systems involves aspects that integrate technological components, as microcontrollers, robotic manipulators, sensors and effectors, which are widely used in Mechatronics operations areas: mechanical, electronical and computational The prototype, proposed in this work, consists in a sorter conveyor with automatic unloader. Substandard pieces can be removed from this sorter conveyor automatically. This process allows higher products quality; thereby companies could be more competitive in an increasing globalized market, ensuring their growth and the creation of better jobs and better salaries, a safe working environment and less repetitive and monotonous work.
Keywords - Mechatronics. Sorter Conveyor. Automatic unloader. Microcontrollers.
_____________________
1Aluno do Curso de Tecnologia em Mecatrônica Industrial da Faculdade de Tecnologia de Garça-FATEC. 2Docente da Faculdade de Tecnologia de Garça-FATEC.

2
1. INTRODUÇÃO
Este Projeto de Pesquisa foi desenvolvido como conclusão do curso de
Tecnologia em Mecatrônica Industrial da Faculdade de Tecnologia de Garça
Deputado “Júlio Julinho Marcondes de Moura”.
O mundo atual é beneficiado pelo progresso advindo dos investimentos em
ciência e tecnologia.
Nesse contexto, decidiu-se que o tema escolhido, deve estar diretamente
relacionado com as tecnologias mais contempladas no curso, que são a automação
industrial e a robótica, com a utilização dos recursos da mecatrônica, ou seja, a
integração entre a mecânica, a eletrônica e a informática.
Para Rosário (2009, p. 11)
Ao longo dos últimos anos é cada vez mais frequente a utilização de componentes eletrônicos, tais como sensores, atuadores eletromecânicos e circuitos de controle, para acionamento e para controle de sistemas mecânicos dando origem a mecatrônica, que pode ser definida como a integração concorrente de conhecimentos nas áreas de Mecânica, de Eletrônica e Computação.
Este projeto consiste em uma esteira na qual foi acoplado um sistema atuador
para o descarregamento automático das peças fora do padrão estabelecido.
1.1 Problema de pesquisa
Produtividade: o aumento da produtividade é uma questão de sobrevivência
das empresas no mercado. Isto permite o crescimento destas, a geração de
empregos, a circulação de riquezas e o aumento do recolhimento de impostos nos
municípios, estados e países onde elas se encontram.
Segurança e saúde: manipulação de produtos perigosos, volumosos, de peso
excessivo; bem como movimentos repetitivos; podem causar danos à saúde e à
integridade física dos colaboradores.
1.2 Objetivos
1.2.1 Geral
Desenvolver um protótipo mecatrônico para analisar um processo de
automação, no qual serão identificadas e retiradas da linha de produção as peças que
não estão em conformidade com o padrão estabelecido.

3
1.2.2 Específicos
Identificar as peças não em conformidade;
Movimentação das peças não em conformidade;
Aferir o comportamento do processo num ambiente de repetitividade;
Verificar a eficácia do processo automatizado.
1.3 Relevância do projeto
O projeto demonstra a possibilidade do uso de microcontroladores em
aplicações industriais, facilita a manipulação do produto em uma esteira, exigindo
menor esforço e diminuição dos riscos para o operador.
As questões colocadas refletem a relevância social do tema: a segurança e
bem-estar do operador; as econômicas: aumento da produtividade e da lucratividade;
e para a pesquisa acadêmica, contribui para o progresso da ciência, por meio da
ampliação, aprofundamento e sistematização do conhecimento.
Sistemas apoiados em computadores, substituindo o trabalho humano, com
objetivo de aumentar a segurança das pessoas, da qualidade dos produtos, da
produtividade ou da redução de custos, aperfeiçoam os complexos objetivos das
indústrias, dos serviços ou bem-estar. (MORAES e CASTRUCCI, 2007)
2. DESENVOLVIMENTO
2.1 Referencial teórico
2.1.1 Automação industrial
A palavra automação está diretamente ligada ao controle automático, ou seja,
ações que não dependem da intervenção humana.
A automação é muito aplicada para melhorar a produtividade e qualidade nos
processos considerados repetitivos.
Ela pode ser entendida como uma tecnologia integradora de três áreas: a
eletrônica responsável pelo hardware, a mecânica na forma de dispositivos mecânicos
(atuadores) e a informática responsável pelo software que irá controlar todo o sistema.
Para Rosário (2009, p. 18), “automação é todo processo que realiza tarefas e
atividades de forma autônoma ou que auxilia o homem em suas tarefas do dia-a-dia”.

4
Na figura 1 pode ser observado as grandes áreas de conhecimento que quando
atuam de forma integrada constituem a mecatrônica.
Figura 1 - Ciclo abrangente de Automação referente à Mecatrônica.
Fonte: Centro universitário do Estado do Pará - Cesupa (2016).
2.1.2 Rolamentos
O rolamento radial de uma carreira de esferas é indicado para rolos de apoio
de correias transportadoras. No projeto funcionará submetido à ação de uma carga
radial de 1KN, atuando com uma rotação de 85rpm. O diâmetro do eixo é de 15 mm.
Para diâmetro do eixo 15 mm, encontra-se no catalogo FAG os seguintes
rolamentos, indicados na tabela 1.
Tabela 1- Rolamentos do catálogo FAG.
DESIGNAÇÃO CAPACIDADE DE CARGA DIÂMETRO EXTERNO
C (KN) Co (KN)
16002 5,6 2,85 32
6002 5,6 2,85 32
6202 7,8 3,75 35
Fonte: Os autores
Para rolos de apoio de correias transportadoras o fator de esforços dinâmico fl
é:
4,5 <= fl <= 5
Encontra-se fl = 4,75

5
O fator de rotação fn é:
n = 85 rpm fn = 0,732
Como não existe carga axial, a carga dinâmica equivalente é a própria carga
radial:
P = Fr = 1KN.
A capacidade de carga dinâmica é:
C = P * fl / fn = 1 * 4,75 / 0,732 = 6,49KN
C = 6,49KN
O rolamento FAG 16002 possui C = 5,6 KN. O fator de esforços dinâmico de
rolamento fl para este é:
fl = C / P * fn = 5,6 / 1 * 0,732 = 4,1
fl = 4,1
Portanto fl não está no intervalo indicado.
Já o rolamento FAG 6202 possui C = 7,8 KN. Seu fator de esforço dinâmico de
rolamento fl é:
fl = C / P * fn = 7,8 / 1 * 0,732 = 5,7
fl = 5,7
Donde se conclui que FAG 6202 é o rolamento indicado.
Assim, foi utilizado o rolamento 6202-ZZ, ilustrado na Figura 2.
Figura 2 – Rolamento 6202 - ZZ
Fonte: Ferramentas gerais
2.1.3 Microcontrolador
Para Miyadaria (2011, p. 21) são dispositivos de pequena dimensão que
possuem certa “inteligência”, basicamente são constituídos de CPU (Unidade Central
de Processamento), memória de dados e de programas, e periféricos como, por

6
exemplo, portas de I/O. Possuem em um pequeno espaço, milhões de componentes
colocados em uma única pastilha de silício pela técnica de circuitos integrados.
São utilizados em grande parte dos equipamentos digitais, tais como: celulares,
eletrodomésticos e impressoras.
Foi utilizado o PIC18F4550, que é um microcontrolador pertencente à família
PIC18F2455/2550/4455/4550 da Microchip, tendo como principais características:
Comunicação USB compatível com a versão 2.0;
Funciona em Low speed (1.5 Mbps) e full speed (12 Mbps);
Opera com frequência até 48MHz;
13 canais de AD de 10 bits;
35 I/O;
32768 bytes de memória de programa;
2048 bytes de memória de dados;
256 bytes de memória não volátil EEPROM;
13 Canais de A/D;
5 Portas bidirecionais de I/O.
A figura 3 mostra a pinagem do microcontrolador PIC18F4550. Neste é possível
identificar as características de cada pino, como por exemplo os pinos digitais,
analógicos, Vdd, Vss, etc.
Figura 3 – Pinagem do microcontrolador PIC18F4550.
Fonte: Comunicação usb com PIC 18F4550. Ebah (2015).
2.1.4 Produtividade
Para GAITHER e FRAZIER (2006, p. 461) três fatores afetam a produtividade
da mão-de-obra; tecnologia, máquinas, ferramentas e métodos de trabalho que
sustentam e auxiliam o trabalho deles; e qualidade de produto. Grupos de assessoria,

7
como, por exemplo, da engenharia industrial, de processos, de produtos e de
sistemas, lutam para desenvolver uma melhor automação, máquinas, ferramentas e
métodos de trabalho para aumentar a produtividade. Aumentar a produtividade
através de desenvolvimentos tecnológicos é, no mínimo, tão importante quanto o
desempenho do emprego no trabalho para aumentar a produtividade. E reduzir
defeitos, sucata e retrabalho aumenta diretamente a produtividade de todos os fatores
da produção.
2.2 Metodologia do protótipo
A metodologia utilizada é o desenvolvimento de um protótipo, que consiste em
uma esteira e um descarregador automático por meio de eletroímãs.
Este será utilizado para o descarregamento de peças não em conformidade.
O desenvolvimento deste protótipo iniciou-se com a construção da estrutura
mecânica da esteira, onde foi utilizado tubos de aço (metalon) com perfil retangular
40x20mm. Todas as junções soldadas com eletrodo revestido.
Para confecção dos eixos da esteira e ajuste dos rolamentos nos tubos de aços
com diâmetro de 35 mm, usados como roletes da esteira, foi contratada mão de obra
terceirizada (usinagem).
Na produção da correia transportadora, utilizou-se tecido courvin de espessura
2 mm e largura 25 mm.
Para movimento da esteira foi usado um motor elétrico Bosch (FPG 0 130 821
531) com redutor de velocidade, acoplado ao eixo.
Os sensores óptico e capacitivo usados na inspeção das peças, foram fixados
na esteira, através de um suporte feito de barra chata ½” x 1/8”.
A figura 4 mostra a esteira, com o motor elétrico e os sensores óptico e
capacitivo.
Figura 4 - Esteira

8
Fonte: Os autores
No descarregador, conforme ilustrado na figura 5, usou-se um carro
transportador de impressora, com estrutura metálica própria, correia dentada e polias.
Figura 5 - Descarregador
Fonte: Os autores
Já na parte eletrônica foram desenvolvidas as placas de circuitos impresso
(PCB- Printed circuit board), através do software Proteus que possui um ambiente de
simulação de circuitos eletrônicos (ISIS) e outro para o desenho do circuito impresso
(ARES).
As placas desenvolvidas foram:
Ponte H, utilizadas para a reversão dos motores DC do descarregador e
do elevador.

9
Drive de potência/drive de sensor, para controle do eletroímã, motor da
esteira e sensores.
Placa PIC, para conectar a placa do microcontrolador.
Pull down, para chaves mecânicas.
O sistema é controlado por meio de um microcontrolador PIC18F4550.
A figura 6 mostra o painel onde foram instaladas a placa de desenvolvimento
do PIC18F4550 acoplada na do PIC, a placa do pull down, a placa dos drives de
potência e de sensor, e a de ponte H.
Figura 6 – Placas Eletrônicas
Fonte: Os Autores
O protótipo possui dois modos de operação: automático e manual, que são
selecionados por meio de uma chave de duas posições.
No modo automático, o sistema faz as seguintes operações:
Calibração do sistema com o posicionamento no ponto zero da máquina (posição
fora da esteira). Este consiste em:
o Posicionar o descarregador (carro horizontal) no ponto do fim de curso 1,
o Posicionar o elevador vertical no ponto do fim de curso 1;
Aciona a esteira;

10
Quando o sensor óptico detecta uma garrafa, mas o sensor capacitivo não a
detecta (não completamente cheia), ocorrerá as seguintes operações
o Desliga o motor da esteira;
o Avança o descarregador até a peça detectada (fim de curso 2 que se
encontra sobre a esteira);
o Abaixa o elevador vertical (fim de curso 2);
o Liga o eletroímã, atraindo a peça;
o Sobe o elevador vertical, carregando a peça (fim de curso 1);
o Recua o descarregador junto com a peça (fim de curso 1);
o Abaixa o elevador vertical (fim de curso 2);
o Desliga o eletroímã, liberando a peça fora da esteira;
o Sobe o elevador vertical (fim de curso 1), retornando assim para o ponto
zero da máquina;
o Liga a esteira.
No modo manual, também é feita a calibração do sistema com o
posicionamento no ponto zero da máquina (posição fora da esteira). Este consiste em:
Posicionar o descarregador (carro horizontal) no ponto do fim de curso 1;
Posicionar elevador vertical no ponto do fim de curso 1.
Neste modo há chaves ou botões com as funções de controle manual:
Ligar/desligar a esteira;
Subir/descer o elevador;
Avançar/recuar o carro descarregador;
Ligar/desligar o eletroímã.
Este sistema foi desenvolvido em linguagem C, uma linguagem de
programação estruturada, criada em 1972.
Esta linguagem permite a construção de programas complexos com uma
relativa facilidade.
O compilador escolhido é o MikroC da Mikroelektronika. Este organiza as
aplicações dentro de projetos, sendo que os arquivos fontes só poderão ser
compilados se tiverem sido criados dessa maneira.
2.3 Resultados

11
Os testes do protótipo mostraram a viabilidade do mesmo, pois num total de 50
testes efetuados, todos foram bem-sucedidos, atingindo 100% de eficácia.
Todas as peças não em conformidade foram identificadas e a remoção das
mesmas da esteira também ocorreu de acordo com o projeto.
Para a aferição do comportamento do processo num ambiente de repetitividade
realizou-se um teste que consistiu em se colocar, peças dentro e fora do padrão
estabelecido, de forma contínua, na esteira por um período de 15 minutos. Neste
observou-se o bom funcionamento do protótipo.
3. CONSIDERAÇÕES FINAIS
Em relação à produtividade, como o protótipo foi produzido em escala reduzida,
não é possível compará-la à obtida em escala real, de forma manual, em um ambiente
industrial.
No entanto, é provável que o projeto em escala 1:1 melhore a produtividade.
E pode-se concluir que a hipótese defendida por este trabalho atendeu os
seguintes tópicos:
Identificar as peças não em conformidade e
Movimentação das peças não em conformidade.
Além disso, durante os testes do protótipo pode ser observado como a
automação do processo, elimina ou diminui a manipulação dos produtos pelos
operadores. Isso garante o acréscimo da segurança e da integridade física dos
colaboradores. Também permite que estes exerçam atividades mais “nobres”, com
maior uso da capacidade intelectual, menor esforço físico e a eliminação de
movimentos repetitivos.
Ainda ficou comprovada a qualidade deste processo pela uniformidade do
mesmo.
Mas, no desenvolvimento do protótipo foi encontrada as seguintes
necessidades e dificuldades:
Utilização do software MikroC PRO for PIC: explorando a internet em busca de
ferramentas de desenvolvimento de programação em linguagem C para
microcontroladores, foi visto a facilidade e flexibilidade do uso deste software.
Problemas no uso das chaves de fim de curso e botões: quando eram
desligadas ocorria o efeito boucing, causado pela falta de referência ao terra.

12
Neste caso o microcontrolador pode ser “induzido” a “acreditar” que o
componente foi acionado mais de uma vez em intervalos muito pequenos.
Como solução incluiu-se um resistor de pull-down (ligado ao terra).
Desenvolvimento das placas eletrônicas: explorando a internet e com a
orientação de professores, em busca de ferramentas de desenvolvimento de
PCB, placas de circuito impresso, verificou-se a conveniência de ser utilizado
o software Proteus.
Problema no circuito de isolação optoacoplada: no desenvolvimento para
acionar o led interno do optoacoplador 4N25 era utilizado um resistor de
limitação 1kΩ. Porém, como o pulso de acionamento era muito rápido foi
necessário aumentar a corrente de atuação, dessa maneira substituiu-se o
resistor de 1kΩ por outro de 330Ω.
Utilização de gerador de pulso de onda quadrada, usualmente chamado de
PWM, no microcontrolador: Para que os motores DC utilizados no carro
transportador e no elevador chegassem ao final do curso de uma maneira
“suave”, ou seja, sem impacto, desenvolveu-se no programa um tratamento
duty cycle (ciclo de trabalho), que consiste em determinar o tempo em que um
sistema estará em estado de trabalho (ligado) e de repouso (desligado). Neste
caso, os tempos que os motores ficarão ligados e desligados.
E neste protótipo houve a preocupação de desenvolver um sistema flexível que
permite o tratamento de variados tipos de produtos, com o uso de sensores
específicos e modelos adequados de efetuadores para cada um desses produtos.
Esta flexibilidade ainda permite que o mesmo protótipo seja utilizado tanto para
o descarregamento, quanto para a alimentação de uma linha de produção.
No entanto, este trabalho não pretendeu esgotar o tema. Ele é apenas uma
oportunidade para que outros pesquisadores aprofundem o assunto.
Por exemplo, hoje no protótipo, se a corrente elétrica for interrompida, o
eletroímã será desligado, se este estiver carregando uma carga, esta se soltará.
Para se evitar esta perigosa situação, pode-se utilizar um sistema no-break,
composto por um painel e um banco de baterias.
Como alternativa ao eletroímã comum, pode-se usar ímãs permanentes ou
eletropermanentes.
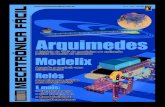
A figura 7 mostra o protótipo completo.

13
Figura 7 – Protótipo
Fonte: Os autores

14
4. REFERÊNCIAS
GAITHER, N.; FRAIZER, G. Administração da produção e operações. 1. ed. brasileira. São Paulo: Pioneira, 2002. MIYADARIA, Microcontoladores PIC 18: aprenda e programe em linguagem C. 2.
ed. ver. E ampl. São Paulo: Érica, 2011. MORAES, C. C.; CASTRUCCI, P. L. Engenharia de automação industrial. 2.ed. São
Paulo: LTC, 2007. Rolamentos FAG. Disponível em: < http://www.irusa.com.br/catalogos/FAG/Cat%E1logo%20Geral%20FAG.pdf > Acesso em: 10 maio 2015. ROSÁRIO, João M. Automação industrial. São Paulo: Baraúna, 2009.
______. Princípios de mecatrônica. São Paulo: Pearson – Prentice Hall,2005.
THOMAZINI, ALBUQUERQUE, Sensores industriais: fundamentos e aplicações.
7. ed. ver. E atual. São Paulo: Érica, 2010.