DETERMINAÇÃO DO AMORTECIMENTO VISCOSO EM SISTEMA SOBRE VIBRAÇÃO TORCIONAL
11
UNIVERSIDADE FEDERAL DO PARÁ INSTITUTO DE TECNOLOGIA - ITEC FACULDADE DE ENGENHARIA MECÂNICA - FEM PROFESSOR: DANILO DE SOUZA BRAGA LAYO RICARDO MACHADO LERAL 201102140075 THIAGO CARVALHO AMARAL 201002140073 DETERMINAÇÃO DO AMORTECIMENTO VISCOSO EM SISTEMA SOBRE VIBRAÇÃO TORCIONAL.
-
Upload
thiago-amaral -
Category
Documents
-
view
19 -
download
2
description
Segundo, (PRÄSS) “Um movimento é dito oscilatório ou vibratório quando o móvel se desloca periodicamente sobre uma mesma trajetória, indo e vindo para um lado e para outro em relação a uma posição média de equilíbrio. Essa posição é o ponto sobre a trajetória, para o qual a resultante das forças que agem sobre o móvel, quando aí passa, é nula”.
Transcript of DETERMINAÇÃO DO AMORTECIMENTO VISCOSO EM SISTEMA SOBRE VIBRAÇÃO TORCIONAL

UNIVERSIDADE FEDERAL DO PARÁ
INSTITUTO DE TECNOLOGIA - ITEC
FACULDADE DE ENGENHARIA MECÂNICA - FEM
PROFESSOR: DANILO DE SOUZA BRAGA
LAYO RICARDO MACHADO LERAL
201102140075
THIAGO CARVALHO AMARAL
201002140073
DETERMINAÇÃO DO AMORTECIMENTO VISCOSO EM SISTEMA SOBRE VIBRAÇÃO
TORCIONAL.
Belém - 2015

1. INTRODUÇÃO
As molas são elementos mecânicos fundamentais que formam a base de muitos sistemas mecânicos. Uma mola pode ser definida como sendo um elemento elástico que exerce uma força resistente quando sua forma é modificada. Cuja principal função é armazenamento de energia, as mesmas podem ser aplicadas na preservação de junções ou contatos, amortecimentos de choques, distribuição de cargas, entre outras aplicações.
A sua classificação se divide basicamente quanto a sua forma geométrica e segundo a maneira que as mesas resistem a esforços. Respectivamente em molas helicoidais de tração, compressão ou torção ou planas simples, de prato, feixe de molas ou espiral.
2. FUNDAMENTAÇÂO TEORICA
A seguir serão tratados os conceitos fundamentais para o entendimento do experimento que trata este relatório:
2.1 Movimentos harmônico simples (MHS).
Segundo, (PRÄSS) “Um movimento é dito oscilatório ou vibratório quando o móvel se desloca periodicamente sobre uma mesma trajetória, indo e vindo para um lado e para outro em relação a uma posição média de equilíbrio. Essa posição é o ponto sobre a trajetória, para o qual a resultante das forças que agem sobre o móvel, quando aí passa, é nula”.
Período:
T=2πω
(1)
Frequência:
f = 1T
= ω2π
(2)
2.2 Vibração
Qualquer movimento que se repita após um intervalo de tempo é denominado vibração ou oscilação. O balançar de um pêndulo e o movimento de uma corda dedilhada são exemplos típicos de vibração. A teoria de vibração trata do estudo de movimentos oscilatórios de corpos e as forças associadas a eles (Rao, Singiresu S. 2008).
Segundo (CISMASIU), “Uma vibração mecânica surge geralmente quando um sistema é deslocado da sua posição de equilíbrio estável. Em geral, quando o sistema tende voltar sob a ação de forças de restituição, ultrapassa esta posição. A repetição deste processo é chamado movimento oscilatório. O intervalo de tempo necessário para o sistema completar um ciclo de movimento chama-se período de vibração. O número de ciclos por unidade de tempo define a frequência, e o deslocamento máximo do sistema medido a partir da sua posição de equilíbrio chama-se amplitude de vibração”.
Aonde está vibração pode ser livre, ou seja sem forças externas aplicadas ou vibração forçada, com a atuação de forças periódicas no sistema. Ainda pode-se classificar o sistema em amortecido, aonde a amplitude decresce lentamente até que o movimento cesse ou não amortecido, aonde o movimento continua indefinidamente, ou seja sem considerar o atrito.
2.1.1 Vibração Livre

Se um sistema, após uma perturbação inicial, continuar a vibrar por conta própria, a vibração resultante é conhecida como vibração livre (Rao, Singiresu S. 2008). Isto é, nenhuma força externa age sobre o sistema e
2.1.2 Vibração Amortecida
Ocorre quando o sistema em oscilação dissipa ou perde energia por meio de atrito ou outra resistência.
2.1.3 Amortecimento Viscoso
Entende-se por amortecimento viscoso um modelo de vibração em um meio fluido (agua, óleo, gás, graxa), a energia é dissipada por meio da resistência que o fluido exerce sobre o corpo em movimento.
2.2 Amortecimento ViscosoF=−C x (3)
m x+c x+kx=0 (4)
x+ cm
x+ km
x=0
(5)
Definindo-se
ω0=√ km
ξ= c2√km
(6)
x+2ξω0 x+ω02 x=0
(7)
x=ert (8)
γ=ω0 (−ξ ±√ξ2−1 ) (9)
A solução da equação acima depende do fator de amortecimento, para ξ>1(duas soluções reais, é dito caso superamortecido),ξ=1(uma solução real, é chamado criticamente amortecido) e 0≤ ξ<1(duas soluções complexas e chamamos de caso sub-amortecido). Para o caso amortecido:
x (t )=A0 e−ω0t cos (ωd t+φ ) (10)
ωd=ω0 √1−ξ2 (11) 2.3 Decremento Logarítmico

É uma consequência em um sistema com vibração livre amortecida e é obtido através de duas amplitudes sucessivas. O termo decremento logarítmico está relacionado com a redução da amplitude após um impulso, isso se deve pois a energia é transferida para outras partes do sistema ou absorvida pelo amortecedor.
δ=1n
ln( θ1
θ2) (12)
ξ= δ
√(2 π)2+δ 2
(13)
2.4 Quadrados mínimos lineares
Como trabalharemos com vários pontos em um gráfico e queremos uma curva que melhor se ajuste a esse conjunto de dados, um dos métodos e o quadrados mínimos lineares. Segundo (AGUIAR JUNIOR) “Inicialmente, vamos analisar o caso em que a curva de ajuste é uma função linear “equação (4)”. Para que esta seja a reta que melhor se ajusta aos dados, devemos minimizar a soma das diferenças entre os valores de f(x) tabelados yi e os valores da curva de ajuste a+bxi em cada ponto. Mas esta diferença pode ser tanto positiva quanto negativa, o que pode ocasionar em uma soma nula das diferenças mesmo com os valores muito distantes da reta. Uma forma de evitar o cancelamento é minimizar o quadrado da diferença. Poderíamos ter escolhido minimizar o módulo da diferença, mas isto acarretaria em uma complicação nos cálculos, devido à necessidade de se obter as primeiras derivadas. Supondo que sejam p pontos tabelados”.
yi=a+bxi (21)
S (a ,b )=∑i=1
p
¿¿¿ (22)
3. MATERIAIS E METODOS
3.1. Matérias
1. Bancada universal para teste de vibração (TecQuipment TM 16 N.S. 200); 2. Eixo de aço (diâmetro e comprimento conhecidos); 3. Folha de papel milimetrado; 4. Marcadora esferográfica; 5. Disco-cônico embutido na bancada; 6. Óleo lubrificante com viscosidade conhecida; 7. Cronômetro; 8. Paquímetro (precisão 0,05 mm).9. Software Origin 8.0®.
3.2. Métodos
Inicialmente, traçamos as referências do gráfico utilizando a marcadora esferográfica acoplada ao amortecedor hidráulico, a condição inicial dada ao experimento foi um deslocamento angular de 20º, simultaneamente liberamos o eixo e o amortecedor hidráulico, assim a marcadora esferográfica têm uma velocidade de marcação constante. Foram traçados 4 gráficos seguindo esse procedimento,

o primeiro foi sem o amortecimento do viscoso do óleo, os demais variamos a altura do cone submersa em óleo em 25 mm, 50 mm e 75 mm, respectivamente.
Tabela 1. Obtenção dos valores de massa através de uma balança de precisão.
Molas Massa [Kg]Mola fina 0,108
Mola media 0,164Mola grossa 0,382
Em seguida, montamos a mola fina na bancada e adicionamos uma massa de 0,4 Kg, neste sistema foi provocado uma condição inicial de deslocamento no sentido para baixo, utilizamos a amplitude máxima superior como referência, após liberar a mola de sua condição inicial o cronometro foi acionado quando está atingiu a referência, após 10 ciclos ou oscilações paramos o cronometro e registramos o tempo. O processo anterior foi repetido mais 4 vezes utilizando uma variação de 0,4 kg até atingirmos 2,0 Kg, o mesmo foi repetido para as molas média e grossa, com a seguinte particularidade para a última que sua variação foi de 1,2 Kg até 6,0 Kg.
Figura 03: Mola montada no equipamento.
Figura 04: Balança de precisão.

Figura 05: Massas utilizadas
Os dados foram trabalhados no software Origin 8.0®, aonde foram tratados e por um processo de regressão linear no métodos dos mínimos quadrados, usando as “equações (2) e (3)”, determinamos as equações lineares do primeiro grau para cada mola para calcularmos seus valores de massa efetiva através dos coeficientes “a e b”, e usando a “equação (11)” determinamos também a massa efetiva da mola pela método analítico, para que possamos compara-los.
4. RESULTADOS
Tabela 2. Resultados encontrados para as frequências.
Frequência Analítica ωna
(rad/s)
Frequência Experimental ωna
(rad/s)
Erro
1,879 2,466 0,2382,236 0,1592,272 0,1721,968 0,045
Tabela 3.Resultados encontrados para o amortecimento.
Coeficiente de Amortecimento
Coeficiente de Amortecimento
(ξoleo )Nível(0) 0,0077 0NIvel(2) 0,0129 0,0052Nivel(4) 0,0093 0,0016NIvel (5) 0,0188 0,0111

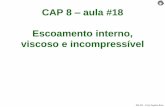
Figura Erro! Nenhum texto com o estilo especificado foi encontrado no documento..1
Figura 06: Gráfico da influência da massa equivalente sobre a frequência natural
5. CONCLUSÃO
O experimento em questão obteve resultados satisfatórios levando em consideração erros sistemáticos com relação aos instrumentos como paquímetro e cronometro utilizados para a tomada de dados e, também em relação a erros aleatórios na obtenção dos dados que se devem ao fator humano, principalmente encontrados no manuseio do equipamento. Através de tal experimento foi verificado que o as frequências naturais experimentais se aproximam da encontrada analiticamente quando aplicamos mais amortecimento ou seja quanto mais mergulhamos o cone no óleo. Em relação aos coeficientes de amortecimento encontrados (tabela 03) encontramos no nosso espaço amostral o dado do nível (4), não condizendo com nossa tendência de aumento de coeficiente em relação ao aumento de área do cone em contato com o óleo. 6. REFERÊNCIAS
RAO, SINGIRESU S. Vibrações Mecânicas, 4 edição. – São Paulo: Pearson Prentice Hall, 2008.HIBBELER, R. C. Dinâmica: mecânica para engenharia, Vol. 2 – São Paulo: Prentice Hall, 2005. HALLIDAY, D., RESNICK,R., WALKER, J., Fundamentos de física. 8ª edição, vol. 3 e 4, editora LTC, 2006.Aguiar, F.L., Junior, W. I.M. “Ajuste de curvas por quadrados mínimos lineares”. Pdf.Präss, A.R., “A Lei de Hooke”. Fisica-net, O canal de física da Internet. Pdf.