ESPAÇO DE ESTADOS · 2007-03-22 · 4.4 Resolução equações de estado ... Exemplo 1 No modelo...
34
ADC/LEB/FCTUC/2007 1 Capítulo 4 ESPAÇO DE ESTADOS ADC/LEB/FCTUC/2007 2 Objectivos do capítulo Espaço de estados Plano de fase Estabilidade • valores próprios Sistemas não lineares • linearização
Transcript of ESPAÇO DE ESTADOS · 2007-03-22 · 4.4 Resolução equações de estado ... Exemplo 1 No modelo...

ADC/LEB/FCTUC/20071
Capítulo 4
ESPAÇO DE ESTADOS
ADC/LEB/FCTUC/20072
Objectivos do capítulo
Espaço de estados
Plano de fase
Estabilidade• valores próprios
Sistemas não lineares• linearização

ADC/LEB/FCTUC/20073
Indice
4.1 Exemplos4.2 Caso Geral4.3 Plano de fase4.4 Resolução equações de estado• Domínio temporal• Trasnformada de Laplace
4.5 Estabilidade4.6 Estados de equilibrio• Linearização
4.7 Conclusões
ADC/LEB/FCTUC/20074
Indice
4.1 Exemplos4.2 Caso Geral4.3 Plano de fase4.4 Resolução equações de estado• Domínio temporal• Trasnformada de Laplace
4.5 Estabilidade4.6 Estados de equilibrio• Linearização
4.7 Conclusões

ADC/LEB/FCTUC/20075
M y B y Ky u•• •
+ + =
Exemplo 1
No modelo do músculo da rã suspenso (Cap. 3) obteve-se a equação diferencial de 2ª ordem
Pode-se reduzir a duas de 1ª ordem, por substituição de variáveis:
1 2 x y x y•
y
B
u(Bruce)
ADC/LEB/FCTUC/20076
1 1 2
2 2
2 2 1
1( )
1ou seja
x y x y x
B Kx y x y y y y u
M M MB K
x x x uM M M
• •
•• • • •• •
•
⇒ = =
⇒ = = = − − +
= − − +
1 2
2 2 1
1
0 1 0
1
x x
B Kx x x u
M M M
x x uK B
M M M
•
•
•
=
= − − +
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= +⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦
x Ax Bu•
= +

ADC/LEB/FCTUC/20077
O que queremos observar ?
Isto é qual é a saída ?
A posição y ?
Neste caso a saída é y e portanto
[ ] [ ]1 1 21 0 0 1 0 0y x x x u x u
y Cx Du
= = + + = +
= +y Cx Du= +
ADC/LEB/FCTUC/20078
( ) ( ) ( )L LV t aV t bP t•
+ =
Exemplo 2
No modelo de inspiração-expiração pulmonar
O que queremos observar ?
V ? Nesse caso x1 é a saída
0
y x
y x u
== +
( )x V u P t
x ax bu•
= − +
x Ax Bu•
= + y Cx Du= +

ADC/LEB/FCTUC/20079
Exemplo 3 Metabolismo da glucose
1 2
3 4
( )
( )
: desvio do nível da glucose do seu valor recomendado
: desvio do nível da insulina do seu valor recomendado
: taxa exper
dgm g m h J t
dtdh
m h m g K tdt
g
h
J
= − − +
= − + +
1 2 3 4
imental de infusão de glucose
: taxa experimental de infusão de insulina
, , , , constantes características de cada indiví o.du
K
m m m m
ADC/LEB/FCTUC/200710
1 21 1 1 1 1 1
4 3 2 2 2 2 22
1 0 1 0 0 0
0 1 0 1 0 0
m mx x u y x u
m m x u y x ux
•
•
⎡ ⎤ − −⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ = + = +⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ − ⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎣ ⎦⎣ ⎦
1 2
1 2
1 1 2 2
11 1 2 2 1 1 1
24 1 3 2 2
Estados:
Entradas: ( ) ( )
Sáidas:
x g x h
u J t u K t
y x y x
dxm x m x u y x
dtdx
m x m x udt
=
= =
= − − + =
= + − + 2 2 y x=
x Ax Bu•
= +y Cx Du= +

ADC/LEB/FCTUC/200711
Exemplo 4 No modelo de Lotka-Volterra
( )( ) ( ) ( )
( )( ) ( ) ( )
dx tax t bx t y t
dtdy t
cy t px t y tdt
= −
= − +
1 2
11 1 2
22 1 2
(presas) (predadores
( )( ) ( ) ( )
( )( ) ( ) (
)
)
= −
= − +
dx tax t bx t x t
dtdx t
cx t px t x tdt
x x x y
ADC/LEB/FCTUC/200712
1 1 21
2 1 22
( , )
( , )
•
•
=
=
x f x x
x f x x
( )x f x•
=
Sistema não linear autónomo (sem entrada exógena)
1 1 21
1 1 22
•
•
= −
= − +
x ax bx x
x cx px x

ADC/LEB/FCTUC/200713
Indice
4.1 Exemplos4.2 Caso Geral4.3 Plano de fase4.4 Resolução equações de estado• Trasnformada de Laplace• Domínio temporal
4.5 Estabilidade4.6 Estados de equilibrio• Linearização
4.7 Conclusões
ADC/LEB/FCTUC/200714
Caso geral
1 1 ( ), ... ( ), ... , (( ), ( ), ), =in mi x t x t
dxf u t t
dttu
1 1 ( ), ..., ( ( ), ..., ( )), ( ,) ( ) =i i mnxy t x tt t u tt g u
n variáveis de estado
x1 x2 … xn
u1
u2
um
y1
y2
yr
•
0 ( , ), ( ) 0
( , )
x f x u x t x
y g x u
= =
=

ADC/LEB/FCTUC/200715
Equação de estado•
0 ( , ), ( ) 0x f x u x t x= =
( , )y g x u=Equação de saída
Caso linear
Caso linear
•
0 , ( ) 0x Ax Bu x t x= + =
y Cx Du= +
ADC/LEB/FCTUC/200716
•
0 , ( ) 0x Ax Bu x t x= + =
B Integrador C
A
+
Condições iniciais
(memória)
D
+
+x•
x yu
y Cx Du= +
Caso linear

ADC/LEB/FCTUC/200717
Vantagens / Desvantagens
FunFunçção de Transferênciaão de Transferência• Para uma entrada e uma saída• Representação Incompleta (não inclui condições iniciais)• Sistemas lineares invariantes (LTI-linear time invariant)• Domínio complexo s
EquaEquaçção de Estadoão de Estado• Para várias entradas e várias saídas• Representação Completa (condições iniciais são
consideradas)• Aplicável a sistemas não lineares e variantes• Possível de representar no domínio temporal t
ADC/LEB/FCTUC/200718
Indice
4.1 Exemplos4.2 Caso Geral4.3 Plano de fase4.4 Resolução equações de estado• Trasnformada de Laplace• Domínio temporal
4.5 Estabilidade4.6 Estados de equilibrio• Linearização
4.7 Conclusões

ADC/LEB/FCTUC/200719
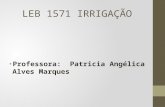
x1 ' = - 2 x1 + 3 x2 + ux2 ' = - 0.5 x1 + 2 x2
u = 1
-1 -0.5 0 0.5 1 1.5 2 2.5 3
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
x1
x2
Plano de fase e curvas de fase
x1
x2
ADC/LEB/FCTUC/200720
Plano de fase e curvas de fase
X1 posição
X2
velocidade
y
B
u(Bruce) XO

ADC/LEB/FCTUC/200721
Indice
4.1 Exemplos4.2 Caso Geral4.3 Plano de fase4.4 Resolução equações de estado• Domínio temporal • Transformada de Laplace
4.5 Estabilidade4.6 Estados de equilibrio• Linearização
4.7 Conclusões
ADC/LEB/FCTUC/200722
Indice
4.1 Exemplos4.2 Caso Geral4.3 Plano de fase4.4 Resolução equações de estado• Domínio temporal• Transformada de Laplace
4.5 Estabilidade4.6 Estados de equilibrio• Linearização
4.7 Conclusões

ADC/LEB/FCTUC/200723
Resolução da equação de estado no domínio temporal
Parte homogénea
•
, (0) 0x Ax Bu x x= + =
•
0 , (0) x Ax x x= =
Exemplo•
0 , (0) (uma variável de estado)x ax x x= =
0
0 0
( ) . de facto,
( )
at
at at
x t e x
x x ae a x e ax•
=
= = =
ADC/LEB/FCTUC/200724
•
0 , (0) ( variáveis de estado)x Ax x x n= =
0( ) . ????Atx t e x=
… e se A for uma matriz ?
2 32 31 ... ...
2! 3! !
kat kt t t
e at a a ak
= + + + + + +
2 32 31 ... ...
2! 3! !
kAt kt t t
e At A A Ak
= + + + + + +

ADC/LEB/FCTUC/200725
0( ) ( )x t t x= Φ
Matriz de transição de estado, Φ(t)
Conhecida a condição inicial, para calcular o estado em qualquer instante futuro basta multiplicar o estado inicial pela matriz de transição de estado nesse instante;
isto é, esta matriz transita o estado inicial para o instante t, e daí o seu nome.
ADC/LEB/FCTUC/200726
-1-1 1 0
0
( ) ... 0 n nn
I A
Q a a a
λ
λ λ λ λ
− =
= + + + + =
Valores próprios de A: raízes da sua equação característica
Vectores próprios à direita de A: vectores v tais que
Vectores próprios à esquerda de A: vectores w tais que
Polinómio característico da matriz A
0 [ ] 0T T T T Tw w A w w A w I Aλ λ λ= ⇔ − = ⇔ − =
0 [ ] 0v Av v Av I A vλ λ λ= ⇔ − = ⇔ − =

ADC/LEB/FCTUC/200727
Estrutura própria da matriz A (caso de valores próprios distintos)
Conjunto dos
Valores próprios λi
Vectores próprios
à direita vi
à esquerda wi
1 1
n nT
i i i i ii i
A v w Zλ λ= =
= =∑ ∑A matriz A pode ser reconstruída a partir da sua estrutura
própria (caso n valores próprios distintos)
Matrizes Constituintes
de A
ADC/LEB/FCTUC/200728
1
1
1 1 2 2
( ) . . (0)
. . (0) . (0). ... . . (0)
j
c n
nt T
j jj
t tt T T Tn n
x t e v w x
e v w x e v w x e v w x
λ
λ λλ
=
⎡ ⎤= ⎢ ⎥⎣ ⎦
= + + +
∑
1
. j
ntAt T
j jj
e e v wλ
=
⎡ ⎤= ⎢ ⎥⎣ ⎦∑
Pelo Teorema das Matrizes Constituintes
e portanto

ADC/LEB/FCTUC/200729
Exemplo
y
B
u(Bruce)
ADC/LEB/FCTUC/200730
Exemplo

ADC/LEB/FCTUC/200731
Exemplo
ADC/LEB/FCTUC/200732
Exemplo

ADC/LEB/FCTUC/200733
Solução da equação de estado completa
x Ax Bu•
= +
( )
0
( ) (0) ( )
( )
tAt A t
zi zs
x t e x e Bu d
x t x x
τ τ τ−= +
= +
∫
ADC/LEB/FCTUC/200734

ADC/LEB/FCTUC/200735
Indice
4.1 Exemplos4.2 Caso Geral4.3 Plano de fase4.4 Resolução equações de estado• Domínio temporal
• Transformada de Laplace4.5 Estabilidade4.6 Estados de equilibrio• Linearização
4.7 Conclusões
ADC/LEB/FCTUC/200736
Resolução da equação de estado
-pela transformada de Laplace

ADC/LEB/FCTUC/200737
ADC/LEB/FCTUC/200738

ADC/LEB/FCTUC/200739
ADC/LEB/FCTUC/200740
Exemplo

ADC/LEB/FCTUC/200741
Exemplo
ADC/LEB/FCTUC/200742
Exemplo

ADC/LEB/FCTUC/200743
Exemplo
ADC/LEB/FCTUC/200744
Exemplo

ADC/LEB/FCTUC/200745
Exemplo
ADC/LEB/FCTUC/200746
Exemplo

ADC/LEB/FCTUC/200747
Exemplo
ADC/LEB/FCTUC/200748
Exemplo

ADC/LEB/FCTUC/200749
Exemplo
ADC/LEB/FCTUC/200750
Indice
4.1 Exemplos4.2 Caso Geral4.3 Plano de fase4.4 Resolução equações de estado• Transformada de Laplace• Domínio temporal
4.5 Estabilidade4.6 Estados de equilibrio• Linearização
4.7 Conclusões

ADC/LEB/FCTUC/200751
0( ) ( )x t t x= Φ
Matriz de transição de estado, Φ(t)
Valores próprios - vectores próprios (esquerda/direita)
2 32 31 ... ...
2! 3! !
kAt kt t t
e At A A Ak
= + + + + + +
0( ) . = Atx t e x
1
. j
ntAt T
j jj
e e v wλ
=
⎡ ⎤= ⎢ ⎥⎣ ⎦∑
ADC/LEB/FCTUC/200752
Este resultado diz-nos que, para uma dada condição iniciala trajectória temporal do estado é uma soma ponderada de exponenciais dos valores própriosda matriz A ( os termos eλt) . são os vectores próprios que estabelecem os coeficientes de ponderação.
Se existe um λi real positivo lim i t
te λ
→ ∞= ∞
… e o sistema é instável em relação às condições iniciais!!!
Estabilidade ?

ADC/LEB/FCTUC/200753
Condição necessária e suficiente de estabilidade às condições iniciais:
• Que todos os valores próprios de A tenham parte real negativa ou nula, mas neste caso só pode haver um (de parte real nula).
ADC/LEB/FCTUC/200754
Indice
4.1 Exemplos4.2 Caso Geral4.3 Plano de fase4.4 Resolução equações de estado• Transformada de Laplace• Domínio temporal
4.5 Estabilidade4.6 Estados de equilibrio• Linearização
4.7 Conclusões

ADC/LEB/FCTUC/200755
Estados de equilíbrio de sistemas não-lineares
( , )x f x u•
=
0 ( , ) 0x f x u•
= ⇔ =
( , ) 0S Sf x u =
( , )s s sy g x u=
ADC/LEB/FCTUC/200756
•
1 1 2
•
2 2 1 2
- 2
( - )
x x x u
x x x x
= +
=
1
2
1
1
2
0
s S
s S
x u
x u
⎡ ⎤= ⎢ ⎥⎣ ⎦⎡ ⎤
= ⎢ ⎥⎣ ⎦
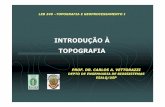
Exemplo
x1 ' = x1 + x2 - 2 ux2 ' = x2 (x1 - x2)
u = 1
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4
-1
-0.5
0
0.5
1
1.5
2
x1
x2
0•
=x

ADC/LEB/FCTUC/200757
Indice
4.1 Exemplos4.2 Caso Geral4.3 Plano de fase4.4 Resolução equações de estado• Transformada de Laplace• Domínio temporal
4.5 Estabilidade4.6 Estados de equilibrio• Linearização
4.7 Conclusões
ADC/LEB/FCTUC/200758
Linearização em torno dos estados de equilíbrio
Série de Taylor
1 1 11 1
( ,...) ( , )
+ termos de ordem superior= =
∂ ∂+ ∆ = + ∆ + ∆
∂ ∂∑ ∑n m
i ii s i s k k
k kk k
f ff x x f x x u
x u
1 1 11 1
( ,...) g ( ,...)
+ termos de ordem superior= =
∂ ∂+ ∆ = + ∆ + ∆
∂ ∂∑ ∑n m
i ii s i s k k
k kk k
g gg x x x x u
x u

ADC/LEB/FCTUC/200759
1 1
1
1 ( , )
...
... ... ...
...S S
n
n n
n x u
f f
x x
A
f f
x x
∂ ∂⎡ ⎤⎢ ⎥∂ ∂⎢ ⎥
= ⎢ ⎥⎢ ⎥∂ ∂⎢ ⎥⎢ ⎥∂ ∂⎣ ⎦
1 1
1
1 ( , )
...
... ... ...
...S S
m
n n
m x u
f f
u u
B
f f
u u
∂ ∂⎡ ⎤⎢ ⎥∂ ∂⎢ ⎥
= ⎢ ⎥⎢ ⎥∂ ∂⎢ ⎥⎢ ⎥∂ ∂⎣ ⎦
1 1
1
1 ( , )
...
... ... ...
...S S
n
p p
n x u
g g
x x
C
g g
x x
⎡ ⎤∂ ∂⎢ ⎥∂ ∂⎢ ⎥⎢ ⎥=⎢ ⎥∂ ∂⎢ ⎥⎢ ⎥∂ ∂⎣ ⎦
1 1
1
1 ( , )
...
... ... ...
...S S
m
p p
m x u
g g
u u
D
g g
u u
⎡ ⎤∂ ∂⎢ ⎥∂ ∂⎢ ⎥⎢ ⎥=⎢ ⎥∂ ∂⎢ ⎥⎢ ⎥∂ ∂⎣ ⎦
Definindo os Jacobianos
ADC/LEB/FCTUC/200760
( , ) ( , )
( ) ( , ) ( , )
( , ) ( , )
s s s s s s
s s s s s s
s s s s s s
x f x u y g x u
x x f x x u u y y g x x u u
x x f x u A x B u y y g x u C x D u
•
• •
• •
= =
+ ∆ = + ∆ + ∆ + ∆ = + ∆ + ∆
+ ∆ = + ∆ + ∆ + ∆ = + ∆ + ∆
Substituindo na série de Taylor
•
x A x B u
y C x D u
∆ = ∆ + ∆∆ = ∆ + ∆

ADC/LEB/FCTUC/200761
•
1 1 2 1 2
•
2 2 1 2
- 2
( - )
x x x u y x x
x x x x
= + =
=
1 1
1s Sx u⎡ ⎤
= ⎢ ⎥⎣ ⎦
Exemplo
2 2 1
2 1
[1,1]
[1,1]
1 1 B=[-2]
2
[ ] D=[0]
⎡ ⎤= ⎢ ⎥− +⎣ ⎦
=
Ax x x
C x x
2 2
0s Sx u⎡ ⎤
= ⎢ ⎥⎣ ⎦
2 2 1
2
[2,0]
[2,0]1
1 1 B=[-2]
2
[ ] D=[
0]
⎡ ⎤= ⎢ ⎥− +⎣ ⎦
=
Ax x x
C x x
ADC/LEB/FCTUC/200762
1 1
1s Sx u⎡ ⎤
= ⎢ ⎥⎣ ⎦
1 1 B=[-2]
1 1
[1 1] D=[0]
A
C
⎡ ⎤= ⎢ ⎥−⎣ ⎦
=
2 2
1s Sx u⎡ ⎤
= ⎢ ⎥⎣ ⎦
1 1 B=[-2]
0 2
[2 1] D=[0]
A
C
⎡ ⎤= ⎢ ⎥⎣ ⎦
=
eig(A) = [ -1.411.41]
eig(A) = [ 12 ]

ADC/LEB/FCTUC/200763
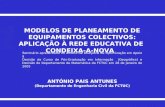
Os estados de equilíbrio são um pontos sela e um nó instável
x1 ' = x1 + x2 - 2 ux2 ' = x2 (x1 - x2)
u = 1
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4
-1
-0.5
0
0.5
1
1.5
2
x1
x2
Alcançam que ponto de equilibrio?
Depende das condições iniciais!
ADC/LEB/FCTUC/200764
Exemplo •2
1 1 2
•2
2 2
( -1)
( - 2)
x x u y x
x x u
= − =
= −
2 21 1 1
2 22 2 2
( -1) 0 ( -1) ( -1)
( - 2) 0 ( - 2) ( - 2)
x u x u x u
x u x u x u
− = ⇔ = ⇔ = ±
− = ⇔ = ⇔ = ±
1 1
2 2
( -1) = 1
( - 2) = 2
S S
S S
x u x u
x u x u
⇔ = ± ⇔ ±
⇔ = ± ⇔ ±
1
2
1 [2,3]
[0,1]
TS S
TS
u x
x
= ⇔ =
=

ADC/LEB/FCTUC/200765
1
2
= 1
= 2
S S
S S
x u
x u
±
±
1 2 3 3
1
2 2 0 0
3 1 3 1
2 0 2 0 2 0 2 0
0 2 0 2 0 2 0 2
nó instável ponto sela
S
S S S S
u
x x x x
A A A A
=
⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤= = = =⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦
− −⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤= = = =⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦
ponto sela nó estável
ADC/LEB/FCTUC/200766
x1 ' = (x1 - 1)2 - ux2 ' = (x2 - 2)2 - u
u = 1
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4
-2
-1
0
1
2
3
4
x1
x2

ADC/LEB/FCTUC/200767
Indice
4.1 Exemplos4.2 Caso Geral4.3 Plano de fase4.4 Resolução equações de estado• Transformada de Laplace• Domínio temporal
4.5 Estabilidade4.6 Estados de equilibrio• Linearização
4.7 Conclusões
ADC/LEB/FCTUC/200768
Conclusão
A representação de estado aplica-se de igual modo aos sistemas• lineares e não lineares, variantes ou invariantes.
No caso linear obtém-se uma representação matricial. • As propriedades dinâmicas do sistema são dependentes dos
valores próprios da matriz de estado, tal como são dependentes dos pólos da função de transferência na representação no domínio complexo
Os sistemas não lineares podem ter zero, um ou vários estados de equilíbrio para a a mesma entrada. • Alcançam um ou outro conforme as condições iniciais.
Aproximando as funções de estado e de saída pela série de Taylor nos pontos de equilíbrio, desprezando os termos de ordem superior à primeira, obtém-se um sistema linearizado.