MATEMÁTICA E SUAS TECNOLOGIAS Ensino Fundamental, 9° ano Homotetia.

Capıtulo 2
Geometria Euclidiana
Euclides desenvolveu os conceitos e as relacoes existentes na Geometria Eu-clidiana com base em cinco proposicoes primitivas, conhecidas como axio-mas ou postulados. Estas proposicoes foram definidas em termos de ideiasbem familiares a todos: elas utilizam o conceito primitivo de ponto e as duasrelacoes primitivas – a intermediacao (um ponto pode estar situado entredois outros pontos distintos) e a congruencia (e possıvel sobrepor as figurasgeometricas, uma sobre a outra, de tal modo que haja uma correspondenciabiunıvoca entre todos os seus pontos) e sao intimamente relacionados comos instrumentos que se utilizava para construir as figuras geometricas: reguae compasso.
Postulado 1 : Pode ser desenhada uma linha reta conectando qualquerpar de pontos.
Postulado 2 : Qualquer segmento reto pode ser estendido indefinidamentepela linha reta.
Postulado 3 : Dado um segmento reto, um cırculo pode ser desenhadotendo o segmento como raio e um dos seus extremos como o centro.
Postulado 4 : Todos os angulos retos (π2 ) sao congruentes.
Postulado 5 : Se duas linhas intersectam uma terceira linha de tal formaque a soma dos angulos internos em um lado e menor que dois angulosretos, entao as duas linhas devem se intersectar neste lado se foremestendidas indefinidamente.
O quinto postulado e tambem conhecido como Postulado de Paralelismo.Ate hoje nao foi possıvel prova-lo como um teorema. A Geometria para
8

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 9
a qual sao satisfeitos os cinco postulados e conhecida como GeometriaEuclidiana; a Geometria que depende dos quatro primeiros postulados edenominada a Geometria Absoluta; e na Geometria Afim somente oprimeiro, o segundo e o ultimo postulados sao relevantes.
2.1 Transformacoes
Para descrever as manipulacoes sobre as figuras geometricas, e convenienteintroduzir o conceito de transformacao T :<n → <n para designar a cor-respondencia biunıvoca entre os pares de pontos num plano (n=2) ou numespaco (n=3). Quando os membros de um par forem o mesmo ponto P,dizemos que P e um ponto invariante.
O resultado de aplicacoes sucessivas, isto e concatenacao, de um con-junto de transformacoes e chamado o produto das transformacoes.
Um conjunto de transformacoes providas da operacao de concatenacaoforma um grupo, se
1. e satisfeita a lei associativa
2. existe uma transformacao identidade
3. existe a transformacao inversa para qualquer transformacao
Pode-se considerar que o criterio que distingue uma Geometria da outrae o grupo de transformacoes para as quais todos os seus postulados ouproposicoes se mantem verdadeiros.
Ha duas classes (tıpicas) de transformacoes na Geometria Euclidiana:isometrias e semelhacas.
2.1.1 Isometria
A isometria e uma transformacao que preserva as medidas e a forma; istoe, dados dois pares de pontos (P,P ′) e (Q,Q′), entao PQ = P ′Q′. Dizemosque PQ e P ′Q′ sao dois segmentos congruentes. Existem quatro tipos deisometrias, sob os quais a relacao de congruencia entre as figuras e invariante:
• rotacao em torno de um ponto P (ou em torno de uma linha que passapelo ponto P ), tendo P (ou a linha) como ponto(s) invariante(s);
• translacao ou deslocamento paralelo, sem pontos invariantes;
• reflexao para a qual os pontos invariantes sao todos os pontos do“espelho”; e

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 10
• glide que consiste no produto de uma reflexao em torno de uma linhae uma translacao ao longo desta mesma linha.
Exercıcio 2.1 Qual e o produto de duas rotacoes em torno de dois angulosopostos (α e -α) em torno de dois pontos distintos?
Exercıcio 2.2 Uma translacao pode ser expressa como o produto de duasreflexoes. Neste caso, qual deve ser a posicao dos dois espelhos utilizadospara reflexoes?
Exercıcio 2.3 Quais sao os pontos invariantes de uma rotacao e de umareflexao?
Exercıcio 2.4 Qual e o produto de duas glides cujos eixos sao perpendicu-lares?
As isometrias que preservam a orientacao das figuras sao denominadasisometrias diretas. Rotacoes e translacoes sao as isometrias diretas. Asisometrias que invertem a orientacao das figuras sao chamadas isometriasinversas ou indiretas. Reflexoes e glide sao isometrias indiretas.
Exercıcio 2.5 Se I e uma isometria inversa, entao o produto de duas iso-metrias I e uma translacao.
A aplicacao de isometria de uma figura geometrica sobre ela mesma euma simetria. Um polıgono regular de n lados e, por exemplo, uma figurasimetrica obtida com rotacoes de angulos de 2π
n de uma “parte basica” dafigura.
Aplicacao 2.1 A combinacao de isometrias nos permite criar a partir deum mesmo padrao distintas figuras geometricas. Este princıpio e muito uti-lizado para aumentar a eficiencia do processo de modelagem geometrica. Elenos garante que somente as partes basicas (padroes) de um objeto precisamser efetivamente modeladas, como ilustram os seguintes casos.
Padrão
Padrão
(a) (b)

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 11
Aplicacao 2.2 Um caleidoscopio e constituıdo com base no princıpio dasmultiplas reflexoes de uma mesma figura pra formar um objeto simetrico.
Exercıcio 2.6 Dados dois espelhos formando um angulo de 1800
n entre si.Qual e o numero de imagens visıveis formadas por eles?
2.1.2 Semelhanca
Duas figuras sao ditas semelhantes, se todos os angulos correspondentessao, direta ou opostamente, iguais e todas as distancias sao multiplicadaspor um mesmo fator de escala λ. A transformacao que leva uma figura auma figura semelhante e uma semelhanca e o fator λ e conhecido comorazao de semelhanca (ratio of magnification). Quando λ > 0, a trans-formacao e direta; ela e inversa ou indireta se λ < 0. Entre as transformacoessemelhantes, temos:
1. homotetia que preserva o paralelismo nas transformacoes. Os sen-tidos das linhas podem ser iguais ou opostos. Neste caso, dizemosque as figuras sao homoteticas ou homologas, isto e, alem de seremsemelhantes, sao semelhantemente dispostas no plano (ou no espaco).Uma homotetia e exatamente definida se for especificado o seu efeitosobre dois pontos distintos.
2. rotacao homotetica e o produto de uma homotetia e uma rotacao.
3. reflexao homotetica e o produto de uma homotetia e uma reflexao.
Exercıcio 2.7 Qual e o inverso da homotetia O(λ)?
Exercıcio 2.8 Qual e o produto de duas homotetias, O(λ1) e O(λ2) ?
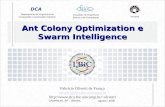
Observacao 2.1 Com uso de reguas, pode-se construir uma figura F se-melhante a figura F ′ com uma razao de semelhanca igual a λ, seguindo oseguinte procedimento:
1. Considere um ponto O fixo;
2. Trace retas entre O e os pontos da figura F ′;3. Para cada ponto X′ de F ′, marque um ponto X sobre a reta OX, tal
que OX′ = λOX.

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 12
O A´ A
B´
B
C´
C
D´
D
F´
F
Este procedimento pode ser adapatado a construcao homotetica (comrazao de semelhanca igual a λ de uma circunferencia de raio C′P ′ comcentro em C′ a partir de uma outra de raio CP :
1. Considere um ponto fixo O;
2. Trace uma reta que passe por O e C e uma reta que passe por O e P ;
3. Marque um ponto C′ sobre a reta OC, tal que OC′ = λOC.
4. Marque um ponto P ′ sobre a reta OP , tal que OP ′ = λOP .
O O1
P
P’
C C’
Aplicacao 2.3 Em torno de 1630, Christoph Scheiner inventou com baseno princıpio de homotetia um instrumento conhecido como pantografo parafazer copias, reduzidas ou ampliadas, de qualquer figura.
A
A’
B
C
O PP’
Exercıcio 2.9 Explique o funcionamento de um pantografo.
Aplicacao 2.4 Em Modelagem Geometrica, o metodo de construcao de fi-guras homoteticas e amplamente utilizado para determinar, por exemplo,diferentes escalas de um mesmo padrao de objeto e geracao de imagens detamanhos distintos.

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 13
2.2 Geometria Analıtica
O estudo de figuras geometricas com uso de ferramentas algebricas atravesdo estabelecimento da relacao das suas coordenadas por equacoes e conhe-cida por Geometria Analıtica. Esta Geometria e tambem conhecida porGeometria de Coordenadas, ja que as figuras sao modeladas por umconjunto de pontos representados por uma lista de n valores denominadoscoordenadas. Quando n = 2 as figuras sao imersıveis num plano e n = 3,imersıveis num espaco tridimensional.
Embora a ideia de “equacionar” a Geometria e solucionar os proble-mas geometricos com uso de tecnicas algebricas remonta aos tempos dosegıpcios, quem desenvolveu a ideia, de forma sistematica, e a transformounuma ciencia independente foi Rene Descartes. Ela foi fundamental parao desenvolvimento de Modelagem Geometrica. Nesta secao apresentaremosalguns resultados de Geometria Analıtica mais conhecidos em ModelagemGeometrica.
2.2.1 Coordenadas
Descartes propos representar os pontos de uma curva planar pelas distancias(x e y) entre os pontos em duas direcoes, X e Y , nao paralelas e deu umainterpretacao geometrica as funcoes. Isaac Newton estendeu a definicao,permitindo que estas distancias assumam valores negativos. O termo “coor-denadas” so foi utilizado pelo Leibniz, quase um seculo depois, para deno-minar estas distancias! O conjunto de direcoes orientadas (eixos) constituium sistema cartesiano para estas coordenadas. Quando os eixos foremperpendiculares entre si, dizemos que as coordenadas sao ortogonais ouretangulares; senao elas sao chamadas oblıquas.
y
x
X
Y
X
Y
x
y
(a) Retangulares (b) Oblıquas
Exercıcio 2.10 Mostre que, em termos de sistema cartesiano geral, umponto (x, y) e transformado em
• (−x,−y) por uma rotacao de 1800.

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 14
• (λx, λy) por uma homotetia com a razao de semelhanca λ
• (x + a, y) por uma translacao na direcao do eixo X.
Exercıcio 2.11 Mostre que, em termos de sistema cartesiano retangular,um ponto (x, y) e transformado em
• (x,−y) por reflexao em relacao ao eixo x
• (y, x) por reflexao em relacao a reta x = y
• (x + a,−y) por um glide em relacao ao eixo x
• (λx, λy) por uma homotetia
Observacao 2.2 Para um mesmo conjunto de pares de coordenadas, pode-mos representar diferentes objetos geometricos em distintos sistemas carte-sianos.
Exercıcio 2.12 Dada a equacao de uma curva f(x, y) = 0. Se aplicarmosuma translacao sobre a curva, por exemplo, um deslocamento ∆x, qual seriaa equacao da curva transformada?
Para tratar problemas de isometrias e semelhancas que tem um pontoinvariante, o uso de coordenadas polares (r, θ) para cada ponto P e,em geral, mais adequado. Estas coordenadas sao definidas em relacao a umponto fixo O, conhecido como polo, (r = OP ) e uma direcao inicial OX (θ =angulo entre OP e OX). Quando O e OX corresponderem, respectivamente,a origem e ao eixo X de um sistema cartesiano retangular, as coordenadascartesianas retangulares deste sistema e as polares se relacionam atraves dasexpressoes
x = rcosθ y = rsenθ.
XO
r
P
y
x
θ
Exercıcio 2.13 Exprime uma homotetia O(λ) em termos de

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 15
1. coordenadas polares, e
2. coordenadas cartesianas retangulares.
Exercıcio 2.14 Simplifique a equacao da seguinte conica por meio de umaadequada rotacao
4x2 + 24xy + 11y2 = 5.
Com uso das coordenadas polares, podemos tambem derivar as condicoesalgebricas da colinearidade de tres pontos O = (0, 0), P1 = (r1, θ1) e P2 =(r1, θ2). Caso estes tres pontos nao forem colineares, a area do trianguloA(OP1P2)
A(OP1P2) =12r1r2sen(θ2 − θ1) =
12r1r2(senθ2cosθ1 − cosθ2senθ1)
que, em coordenadas cartesianas (de um sistema com a origem em O e oeixo inicial coincidente com o eixo X), equivale a
12(x1y2 − x2y1) =
12
∣∣∣∣ x1 y1
x2 y2
∣∣∣∣ .
Consequentemente, para um triangulo qualquer P1P2P3, podemos determi-nar a area do triangulo pelo determinante
12
∣∣∣∣ x1 − x3 y1 − y3
x2 − x3 y2 − y3
∣∣∣∣ =12
∣∣∣∣∣∣x1 y1 1x2 y2 1x3 y3 1
∣∣∣∣∣∣ ,
se fixarmos o polo em P3 e escolher como o eixo inicial um eixo paraleloao eixo X do sistema cartesiano retangular. Daı, podemos concluir que acondicao necessaria e suficiente para que tres pontos sejam colineares e queo determinante seja diferente de zero.
Exercıcio 2.15 Determine a area de um triangulo cujos vertices sao (0, 0),(3, 3) e (1, 6).
2.2.2 Geometria Plana: Retas e Conicas
Por homotetia, os pontos sobre uma reta que passa pela origem e pelo ponto(a,−b) satisfazem a relacao linear
y
x=
a
−b,

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 16
ou seja, ax + by = 0. As retas que nao passam pela origem tambem seguemesta relacao linear, bastando translada-la de forma que um dos seus pontos(x1, y1) coincida com a origem
y − y1
x− x1=
a
−b.
Fazendo c = −ax1 − by1 obtemos
ax + by + c = 0 (2.1)
oux
b+
y
a= − c
ab,
a partir da qual e possıvel derivar que todos os pontos sobre as retas quecortam os dois eixos nos pontos (p, 0) e (0, q) satisfazem a equacao
x
p+
y
q= 1.
Utilizando Eq. 2.1, podemos verificar com uso de numeros o paralelismo deduas retas (quando elas tem a mesma razao a
b ) e a intersecao de duas retas(a solucao de um sistema de duas equacoes lineares do tipo Eq. 2.1).
Se b 6= 0, podemos explicitar a coordenada y em termos de x, isto e,
y =−(ax + c)
b, (2.2)
que e bastante conveniente para plotar os pontos da reta – basta selecionarum intervalo apropriado de coordenadas x.
Tanto na Eq. 2.1 como na Eq. 2.2 esta integrada a nocao da disposicaoda reta em relacao ao sistema cartesiano. Os coeficientes a e b indicam ainclinacao da reta em relacao aos seus eixos. Em algumas aplicacoes, e irrele-vante esta disposicao relativa da figura geometrica. Uma representacao quepermite focar somente nas caracterısticas intrınsecas da figura geometrica,independente do sistema escolhido, e exprimir as coordenadas de uma retaque passa pelo ponto (x0, y0) de direcao (dx, dy) em funcao de um parametrot por meio das equacoes parametricas
x = x0 + dxt y = y0 + dyt. (2.3)
Observacao 2.3 Em Modelagem Geometrica, os tres tipos de representacoesde uma reta sao conhecidos, respectivamente, por representacao implıcitca(Eq. 2.1), explıcita (Eq. 2.2 – observem que o grafico desta funcao e umareta) e parametrica (Eq. 2.3 – observem que os pontos (x(t), y(t)) definemuma reta).

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 17
Exercıcio 2.16 Mostre que
x =1− t2
1 + t2y =
2t1 + t2
e uma alternativa representacao parametrica para
x = cosθ y = senθ
de uma circunferencia de raio igual a 1. Qual e a relacao entre t e θ?
Exercıcio 2.17 Dadas as tres representacoes (algebricas) de uma circun-ferencia de raio 1:
1. x2 + y2 = 1
2. x = ±√
1− y2
3. x = cosθ y = senθ
Determine, quando possıvel, a derivada em cada ponto da curva.
Dados um foco O (ponto fixo) e uma diretriz ~d (reta fixa), as conicas,ou secoes conicas, sao lugares geometricos dos pontos que distam do foco εvezes da reta DX. Dependendo do valor de ε distinguimos
elipse , quando ε < 1,
parabola , quando ε = 1,
hiperbole , quando ε > 1.
O
L P A
~d
O
L
PA
~d
O
LA
P
~d
(a) Elipse (b) Parabola (c) HiperboleEm termos de coordenadas polares, temos para cada ponto P = (r, θ)
r = OP = ε(LA− rcosθ)
Como OL = εLA, que denotaremos por l, segue-se que
r = OP = l − εrcosθ.

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 18
Se o ponto O e a reta OX coincidirem com a origem e o eixo X de umsistema cartesiano, a equacao cartesiana de uma conica e
x2 + y2 = (l − εx)2 (2.4)
Se ε 6= 1, podemos dividir a expressao por a = (1 − ε2) e, apos algumasmanipulacoes algebricas, obter
(x + εa)2
a2+
y2
la= 1
Deslocando a origem O para o ponto (−εa, 0) e definindo b2 = |la| = |1 −ε2|a2, podemos reduzir a expressao algebrica de uma elipse (ε < 1) em
x2
a2+
y2
b2= 1 (2.5)
e de uma hiperbole (ε > 1) em
x2
a2− y2
b2= 1. (2.6)
Para parabolas (ε = 1), Eq. 2.4 se reduz em
x2 + y2 = (l − x)2 → y2 = 2l(12l − x).
Se refletirmos os pontos em relacao a reta x = 14 l, chegamos a expressao
padrao de uma parabolay2 = 2lx. (2.7)
Exercıcio 2.18 O que e uma circunferencia? E uma secao conica? Des-creva o lugar geometrico dos seus pontos com o uso de coordenadas cartesi-anas.
Aplicacao 2.5 Antes da descoberta de NURBS (non-rational uniform B-Splines, sao utilizadas as funcoes implıcitas de segunda ordem
ax2 + 2bxy + cy2 + 2dx + 2ey + f = 0
para descrever exatamente as conicas nos sistemas de modelagem geometrica,como CAD/CAM/CAE. Esta expressao pode ser derivada das Eqs. 2.5 ou 2.6se deslocarmos o centro da conica para um ponto diferente da origem.

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 19
Observacao 2.4 Para a maioria dos casos, as formas parametricas maisconvenientes da elipse, parabola e hiperbole sao, respectivamente,
1. x = acos(t) y = bsen(t),
2. x = 2lt2 y = 2lt,
3. x = acosh(t) y = bsenh(t)
Observacao 2.5 O lugar geometrico de uma circunferencia de raio iguala 1 e x2 + y2 = 1. Em representacao parametrica equivale a x = cosθ ey = senθ, ou seja, as coordenadas dos pontos correspondem exatamente aosvalores das funcoes de seno e de cosseno.
Observacao 2.6 Vale a pena conferir o sıtio http:// turnbull.mcs. st-and.
ac. uk/ ~history/Curves/Curves.html para ver as curvas mais famosas.
2.2.3 Geometria dos Solidos
Sao considerados solidos os objetos que tem volume diferente de zero. Estesobjetos sao descritıveis num sistema cartesiano tridimensional, definido pe-los tres planos axiais perpendiculares entre si XY , Y Z e XZ, de tal formaque cada ponto possa ser representado por tres distancias, denominadas co-ordenadas: x, em relacao ao plano Y Z, y, em relacao ao plano XZ, e z,em relacao ao plano XY . O ponto onde estes tres planos se encontram ea origem O do sistema cartesiano (tridimensional) e as retas onde os paresde planos {XY,XZ}, {XY, Y Z} e {Y Z,XZ} se encontram sao, respectiva-mente, os eixos X, Y e Z deste sistema.
O
Y
X
Z
XY
XZ
YZ
y
zx
Dada uma semi-reta definida parametricamente
x = At; y = Bt; z = Ct, (2.8)
de forma que A2 + B2 + C2 = 1 e t seja a distancia do ponto (x, y, z) emrelacao a origem, o conjunto de semi-retas
x = A′u; y = B′u; z = C ′u,

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 20
que satisfaz a seguinte equacao linear
AA′ + BB′ + CC ′ = 0 → (AA′ + BB′ + CC ′)u = Ax + By + Cz = 0
define um plano perpendicular a semi-reta dada pela Eq. 2.8 passando pelaorigem (0, 0, 0). Se o plano nao passar pela origem, podemos transladar umdos seus pontos (x1, y1, z1) para a origem, isto e,
A(x−x1)+B(y−y1)+C(z−z1) = Ax+By+Cz−(Ax1+By1+Cz1) = Ax+By+Cz−D = 0.
Rearrumando a expressao na forma
x
D/A+
y
D/B+
z
D/C= 1,
pode-se ver que o plano intercepta os eixos X, Y e Z em p = DA , q = D
B er = D
C .
Exercıcio 2.19 Dada a equacao de um plano
3x + y − 1.5z + 7 = 0.
Qual e o vetor normal deste plano? Em quais pontos o plano corta os eixosX, Y e Z do sistema de referencia?
Dois planos sao paralelos se eles so diferem no termo D e dois planosnao paralelos sempre intersectam numa reta que e a solucao do sistema deequacoes lineares correspondentes a estes dois planos.
Uma equacao f(x, y, z) = 0 que relaciona as coordenadas x, y e z usu-almente representa implicitamente uma superfıcie. Duas equacoes repre-sentam, em conjunto, uma curva (de intersecao das duas superfıcies).
As superfıcies quadricas sao primitivas geometricas presentes em di-versos sistemas de CAD/CAM/CAE e Computacao Grafica. Ela sao analgoasas conicas que vimos na Secao 2.2.2: sao funcoes de grau 2 e suas secoes pla-nares sao conicas. Dentre as superfıcies quadricas temos, em representacaoimplıcita,
elipsoide : x2
a2 + y2
b2+ z2
c2= 1
hiperboloide de uma folha : x2
a2 + y2
b2 − z2
c2 = 1
hiperboloide de duas folhas : x2
a2 − y2
b2− z2
c2= 1

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 21
paraboloide elıptica : x2
a2 + y2
b2= 2z
paraboloide hiperbolica : x2
a2 − y2
b2 = 2z
cone elıptica : x2
a2 + y2
b2= z2
cilindro elıptico : x2
a2 + y2
b2= 1
Algumas destas, como elipsoide e paraboloide elıptica, podem ser obtidascom o giro das conicas em torno do eixo de simetria, portanto ela sao tambemconhecidas como quadrica de revolucao.
Exercıcio 2.20 Esboce a forma de cada classe das superfıcies quadricasdadas.
Aplicacao 2.6 A forma implıcita das superfıcies quadricas e apropriadapara classificacao de pertinencia dos pontos (< 0, dentro, =, sobre e >,fora), determinacao da distancia de um ponto em relacao a ela e deter-minacao das intersecoes de raios (retas). Cychosz e Waggenspack apresenta-ram um algoritmo eficiente de intersecao de raios com superfıcies quadricasdefinidas na forma geral
f(x, y, z) = ax2 + 2bxy + 2cxz + 2dx + ey2 + 2fyz + 2gy + hz2 + 2iz + j = 0
que em notacao matricial (ou forma quadratica)
f(x, y, z) =[
x y z 1]
a b c db e f gc f h id g i j
xyz1
.
Os algoritmos de renderizacao baseados no paradigma ray-tracing e mui-tos algoritmos de determinacao dos volumes dos solidos tem como nucleo adeterminacao de intersecao, como ilustram as seguintes figuras. Na figura(a) mostra a determinacao de um ponto visıvel e na figura (b) o calculodo volume de um solido atraves do somatorio dos volumes “infinitesimais”(linhas solidas). Implicitamente um raio (ou seja, uma reta) e representadocomo intersecao de dois planos, G1(x, y, z) = 0 e G2(x, y, z) = 0. Deter-minar a intersecao deste raio com uma superfıcie implıcita F (x, y, z) = 0seria determinar a solucao de um sistema de equacoes (muitas vezes, naolineares) composto por G1(x, y, z) = 0, G2(x, y, z) = 0 e F (x, y, z) = 0.

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 22
Em Modelagem Geometrica, uma solucao mais elegante e eficiente seria re-duzir o problema de tres variaveis em um problema de uma so variavel,substituindo a representacao parametrica do raio (x(t), y(t), z(t)) na funcaoF (x, y, z) = 0, ou seja fazendo F (x(t), y(t), z(t)) = 0.
Fonte Luminosa
Pointo Visível
Pixel
(a) Ray tracing (b) Determinacao do volume
Aplicacao 2.7 A forma parametrica das superfıcies quadricas e muito utilpara sua visualizacao. Sendo o domınio dos parametros uma area quadrada,pode-se amostrar sistematicamente os pontos das superfıcies varrendo a areanas duas direcoes a intervalos regulares ou irregulares. A representacaoparametrica das superfıcies quadricas mencionadas anteriormente e:
elipsoide : x = acos(θ)sen(α), y = bsen(θ)sen(α), z = cos(α), com 0 ≤θ ≤ 2π e 0 ≤ α ≤ 2π.
hiperboloide de uma folha : x = acos(θ)cosh(α), y = bsen(θ)senh(α),z = csenh(α), com 0 ≤ θ ≤ 2π e −π ≤ α ≤ π.
hiperboloide de duas folhas : x = ±acosh(α), y = bsen(θ)senh(α),z = ccos(θ)senh(α), com 0 ≤ θ ≤ 2π e −π ≤ α ≤ π.
paraboloide elıptica : x = aαcos(θ), y = bαsen(θ), z = α2, com 0 ≤ θ ≤2π e 0 ≤ α ≤ αmax.
paraboloide hiperbolica : x = aαcosh(θ), y = bαsenh(θ), z = α2, com−π ≤ θ ≤ π e αmin ≤ α ≤ αmax.
cone elıptica : x = aαcos(θ), y = bαsen(θ), z = cα, com 0 ≤ θ ≤ 2π eαmin ≤ α ≤ αmax.
cilindro elıptico : x = acos(θ), y = bsen(θ), z = α, com 0 ≤ θ ≤ 2π eαmin ≤ α ≤ αmax
Um poliedro convexo e uma regiao do espaco limitada por um numeron finito de planos Aix + Biy + Ciz − D = 0, i = {1, · · ·, n}, ou seja, e o

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 23
conjunto de pontos que satisfazem o seguinte sistema de inequacoes
A1x + B1y + C1z −D ≤ 0A2x + B2y + C2z −D ≤ 0A2x + B2y + C2z −D ≤ 0. . .Anx + Bny + Cnz −D ≤ 0
Exercıcio 2.21 Represente todos os pontos delimitados pelo seguinte objetogeometrico
(1,1,1)
(0,0,0)
Uma outra classe de objetos, reconhecida pelo seu potencial em modelarobjetos organicos ou “amorfos” (as vezes, conhecidos por soft objects), e aclasse de metaballs ou blobby objects. A ideia basica e combinar n funcoesimplıcitas simples fi(x, y, z) e utilizar as isosuperfıcies s da combinacao
F (x, y, z) =n∑
i=1
fi(x, y, z) = s (2.9)
para descrever a geometria de um objeto. Em analogia a fısica das cargaseletricas, as n funcoes implıcitas correspondem aos campos escalares gera-dos pelas n primitivas. Na proposta original de Blinn em 1982, o campoescalar de cada primitiva e constituıdo pelas isosuperfıcies esfericas e de-caem exponencialmente a medida que se afaste da primitiva. Para delimitara influencia de uma primitiva, Wyvill e outros propuseram uma funcao dedecaimento de suporte limitado R, ou seja a influencia fi da parimitiva i emcada ponto (x, y, z) e dada por
fi(r) ={
(−49 ) r6
R6 + (179 ) r4
R4 − (229 ) r2
R2 + 1, se0 ≤ r ≤ R0, seR < r,
onde r e a distancia do ponto (x, y, z) em relacao a primitiva.
Exercıcio 2.22 Dadas duas primitivas localizadas em P1 = (0, 0, 0) e P2 =(3.0.0) com o raio de influencia maximo igual a R1 = 1.5 e R2 = 2. Esbocea forma do objeto representado pelo nıvel

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 24
1. F (x, y, z) = 0.8,
2. F (x, y, z) = 0.2.
2.2.4 Transformacoes 2D
Por simplicidade, so apresentaremos as principais ideias de equacionamentodas transformacoes que ocorrem na Geometria Euclidiana 2D. A extensaopara 3D, embora muito mais trabalhosa, segue a mesma linha de raciocınio.
Seja um ponto P = (r, θ) em coordenadas polares, ele e transformadoem
• (r, θ + α) apos uma rotacao de angulo α em torno de O.
• (r, θ + π) apos uma meia-volta em torno de O.
• (r,−θ) apos uma reflexao em torno da direcao OX
• (r, 2α − θ) apos uma reflexao em torno da direcao θ = α.
• (µr, θ) apos uma transformacao homotetica.
• (µr, θ + α) apos uma rotacao homotetica em torno de O.
• (µr, 2α− θ) apos uma reflexao homotetica em torno da direcao θ = α.
Exercıcio 2.23 O conceito convencional de mudanca de escala em Com-putacao Grafica e similar ao da homotetia? Justifique.
Se o polo O e a direcao inicial coincidir, respectivamente, com a origeme o eixo X do sistema cartesiano, podemos derivar as expressaoes em coor-denadas cartesianas. Por exemplo, para a rotacao de angulo α em torno deO, um ponto (x, y), com x = rcos(θ) e y = rsen(θ), e transformado em
x′ = rcos(θ + α) = r(cos(θ)cos(α)− sen(θ)sen(α)) = xcos(α) − ysen(α)y′ = rsen(θ + α) = r(cos(θ)sen(α) + sen(θ)cos(α)) = xsen(α) + ycos(α),
e para uma transformacao homotetica
x′ = µrcos(θ) = µx
y′ = µrsen(θ) = µy.

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 25
Translacao ou deslocamento e uma transformacao sem ponto invariante.Ela pode ser decomposta como deslocamentos em cada uma das coorde-nadas, ou seja, para cada ponto (x, y) as coordenadas do novo ponto saoobtidas por
x′ = x + ∆x
y′ = y + ∆y,
onde ∆x e ∆y correspondem, respectivamente, montantes de movimento nadirecao dos eixos X e Y , respectivamente.
Exercıcio 2.24 Dados os vertices de um triangulo: P1 = (2, 4, 1), P2 =(4, 6, 1) e P3 = (2, 6, 1) e a reta y = 1
2 (x + 2). Quais sao as coordenadas dotriangulo depois da sua reflexao em torno da reta?
2.2.5 Quaternios
O desenvolvimento do conceito de numeros teve uma trajetoria similar aodesenvolvimento da Geometria. Como em Geometria, varias classes denumeros foram definidas com a principal finalidade de solucionar as equacoes.As representacoes geometricas dos numeros tem sido muito uteis para a suacompreensao e a demonstracao de uma serie de teoremas.
A primeira classe de numeros considerada em Aritmetica foi a classe denumeros naturais, {1, 2, · · ·}. Para resolver equacoes do tipo x + 5 =0, foram introduzidos os numeros inteiros, {· · · ,−2,−1, 0, 1, 2, · · ·}, quepodem ser representados pelos pontos igualmente espacados sobre uma reta(real). A formulacao de equacoes do tipo 3x = 2 levou a definicao dosnumeros racionais. Estes numeros podem ser encontrados tambem nareta a partir da transformacao homotetica dos pontos correspondentes aosnumeros inteiros. Na seguinte figura ilustra um procedimento geometricopara determinar um numero racional a
b .
1. Tracar duas retas paralelas, porem nao perpendiculares a reta real,passando pelos numeros 1 e b. Estas duas retas cortam a reta r, quepassa pelo numero 0, em A e B, respectivamente. A relacao entre estesdois pontos e 1
b .
2. Tracar uma reta que passa por B e o numero a e uma reta s paralelaa ela passando por A.
3. Determinar o ponto de intersecao entre s e a reta real. A razao entreeste ponto e a ao longo da reta real e 1
b , ou seja, o numero correspon-dente ao ponto e a
b .

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 26
b:
1
ab-a a/b1-a/b
A
B
r
s
A equacao x2 = 2 motivou a definicao de numeros reais. Distingui-ram ainda duas sub-classes de numeros: algebricos que podem ser solucoesde uma equacao algebrica (polinomial), e transcendentais, quando nao saopossıveis de serem representados como solucoes de uma equacao polinomial.
Os numeros complexos surgiram como uma resposta para resolver aequacao x2 + 1 = 0. Estes numeros sao representados por um par ordenadode valores reais. Duas operacoes sao definidas sobre estes numeros:
Adicao : (a + bi) + (c + di) = (a + b) + (c + d)i
Multiplicacao : (a + bi)(c + di) = (ac− bd) + (ad + bc)i
Wessel inventou em 1797 o diagrama de Argand para ilustrar grafica-mente estes numeros e os resultados das duas operacoes. Geometricamentea adicao do numero complexo (a+bi), que corresponde ao ponto (a, b) no di-agrama de Argand, com o outro numero (c+di) equivale a deslocar o ponto(a, b) pelos montantes c e d nas direcoes X e Y , respectivamente. A mul-tiplicacao corresponderia a uma rotacao homotetica de angulo α = arctg c
d
e razao de semelhanca s =√
c2 + d2. Este resultado pode ser demonstradoutilizando as coordenadas polares destes pontos. Se as coordenadas polaresdo ponto (a, b) for (r, θ), o resultado da rotacao homotetica seria (sr, θ + α)que, em coordenadas cartesianas,
srcos(θ + α) = sr(cosθcosα− senθsenα)= (scosθ)(rcosα)− (ssenθ)(rsenα)= ac− bd
srsen(θ + α) = sr(senθcosα + cosθsenα)= (ssenθ)(rcosα) + (scosθ)(rsenα)= ad + bc

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 27
O
r
(a,b)
(c,d)
(a+c,b+d)
s
X
Y
θα
O
r
(a,b)
(c,d)s
Y
rs
X
(ac-bd,ad+bc)
θ
α
α
(a) Adicao (b) Multiplicacao
Observacao 2.7 Uma sıntese sobre a historia da Algebra pode ser encon-trada no sıtio www. algebra.com/algebra/about/history .
A descoberta da multiplicacao de um par ordenado de numeros motivouo Hamilton a estudar uma forma de operar com listas de 3 numeros reais. Oresultado da sua pesquisa foi a definicao de quaternios – listas de 4 numerosreais – em 1843. Embora em 1845 ja conhecia o potencial dos quaternios paradescrever rotacoes, so no inıcio do seculo 20 eles passaram a ser aplicadosem varias areas de conhecimento. De forma analoga aos numeros comple-xos, quaternios puros podem ser representados como pontos num sistemacartesiano 3D. Em 1985, Shoemake mostrou que o fato da multiplicacao dedois quaternios correponde a translacao e a rotacao de um ponto em tornode um eixo por um angulo facilita a interpolacao do movimentos das figurasgeometricas entre dois quadros-chave numa Animacao.
Os quaternios, ou numeros hipercomplexos, q = a0 + ia1 + ja2 + ka3
sao uma extensao dos numeros complexos. Ao inves de um valor imaginario(i), temos um “vetor imaginario” (i+j+z), tal que
~1 ~i ~j ~k~1 ~1 ~i ~j ~k~i ~i −~1 ~k −~j~j ~j −~k −~1 ~i~k ~k ~j −~i −~1
Dizemos que a0 e a parte real ou escalar e ~a = ia1 + ja2 + ka3,a parte pura ou vetorial. Um quaternio que tem a parte real nula edenominado quaternio puro. Similar aos numeros complexos, o con-jugado do quaternio a0 + ~a e q = a0 − ~a e o quadrado da sua norma|q| =
√qq =
√a2
0 + a21 + a2
2 + a23. O inverso multiplicativo e definido por
q−1 = q(qq) . Particularmente, para um quaternio unitario, |q| = 1, q−1 = q.
Sao definidas entre dois quaternios q1 = a0 +~a e q2 = b0 +~b as operacoes
Adicao : q1 + q2 = (a0 + b0) + (~a +~b), que pode ser expressa com uso de

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 28
notacao matricial e
a0 + b0
a1 + b1
a2 + b2
a3 + b3
=
a0
a1
a2
a3
+
b0
b1
b2
b3
Multiplicacao : qr = q1q2 = (a0 + b0)− (~a ·~b)) + (a0~b + b0~a + ~a×~b). Em
notacao matricial, temos
q0,r
q1,r
q2,r
q3,r
=
a0 −a1 −a2 −a3
a1 a0 −a3 a2
a2 a3 a0 −a1
a3 −a2 a1 a0
b0
b1
b2
b3
=[
a0 a1 a2 a3
]
b0 b1 b2 b3
−b1 b0 −b3 b2
−b2 b3 b0 −b1
−b3 −b2 b1 b0
.
A primeira multiplicacao e conhecida como multiplicacao esquerdaque corresponde a uma transformacao linear La(b) associando q2 a q1q2
e a segunda, multiplicacao direita Rb(a) que mapeia q1 a q1q2.
Os quaternios sao associativos e nao sao comutativos.De forma analoga aos numeros complexos, podemos representar geo-
metricamente os quaternios unitarios sobre um plano ao definirmos ~I =iu1 + ju2 +ku3 com u2
1 +u22 +u2
3 = 1. Podemos escrever q na forma a0 +µ~I.Se adicionalmente |q| = r, entao existe θ tal que a0 = rcosθ e µ = rsenθ.Isso significa que podemos escrever q na forma polar r(cosθ+ ~Isenθ) = re
~Iθ,o que podera simplificar as multiplicacoes entre os quaternios.
E possıvel demonstrar que se representarmos cada ponto no espaco <3
como um quaternio puro P = ix + jy + kz, uma rotacao T (P ) deste pontode um angulo igual a 2θ em torno de um vetor ~I que passa pela origem podeser dada por
T (P ) = aPa−1, onde a = re~Iθ, r > 0 e ~I2 = −1.
Exercıcio 2.25 Qual e o produto da rotacao de 600 em torno do eixo yseguido de uma rotacao de 600 em torno do eixo x?

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 29
Este resultado nos prove uma ferramenta eficiente e numericamente estavelpara concatenar as rotacoes. Supomos que q1 e q2 sejam dois quaterniosunitarios representando duas rotacoes. A concaternacao da aplicacao dasduas rotacoes sobre um ponto P equivale a
q2(q1Pq−11 )q−1
2
Por associatividade,
(q2q1)P (q−11 q−1
2 ) = (q2q1)P (q2q1)−1.
Exemplo 2.1 Derive, com uso de quaternios, a rotacao em torno do eixoz por um angulo θ.
Neste caso, ~I = k e a = e~I θ
2 = cos θ2 + ksen θ
2 , cuja inversa e a =cos θ
2 − ksen θ2 . Portanto,
T (P ) = (cosθ
2+ ksen
θ
2)((ix + jy + kz)(cos
θ
2− ksen
θ
2)).
Utilizando a notacao matricial, temos
T (P ) =
cos θ2 0 0 −sen θ
2
0 cos θ2 −sen θ
2 00 sen θ
2 cos θ2 0
sen θ2 0 0 cos θ
2
·
·(
cos θ2 0 0 sen θ
2
0 cos θ2 −sen θ
2 00 sen θ
2 cos θ2 0
−sen θ2 0 0 cos θ
2
0xyz
)
=
1 0 0 00 cosθ −senθ 00 senθ cosθ 00 0 0 1
0xyz
Exercıcio 2.26 Derive, com uso de quaternios, a matriz de rotacao emtorno de uma direcao arbitraria U = (ux, uy, uz) por um angulo θ.
Dados dois quaternios a e b. A interpolacao linear q ao longo do arcocircular que passa por eles e dada por
q =sen(1− t)θ
senθa +
sentθ
senθb 0 ≤ t ≤ 1

IA841 — notas de aula — FEEC — 2o SEM/2005 (Ting) 30
Este resultado nos permite interpolar orientacoes, dadas em termos devetores unitarios, de forma similar a interpolacao linear entre dois vetores-posicao.
Exercıcio 2.27 Dados dois quaternios a = (34 + i
√3
4 + j√
34 + k) e b =
(−i2 + k2). Determine a interpolacao linear entre estes dois quaternios.





![MIP-MAPPING.ppt [Somente leitura] - dca.fee.unicamp.br · 60:Sutherland – conceitos estruturação de dados e o núcleo da c.g. interativa; 70: algorítmos, ... Realismo Visual](https://static.fdocumentos.com/doc/165x107/5bf12e0a09d3f28c608b77b1/mip-somente-leitura-dcafeeunicampbr-60sutherland-conceitos-estruturacao.jpg)