![[XLS] · Web view1 1 1 1 1 1 1 1 1 1 7 1 1 3 1 160 168 77 12 6 1 2 78 79 57 19 41 32 17 4 1 1 2 1 1 1 2 7 4 8 4 1 103 100 61 18 42 29 22 4 4 1 3 9 5 2 1 49 1 2 7 4 3 2 2 1 2 1 12 37](https://static.fdocumentos.com/doc/165x107/5aad5f537f8b9a8d678e0ac4/xls-view1-1-1-1-1-1-1-1-1-1-7-1-1-3-1-160-168-77-12-6-1-2-78-79-57-19-41-32-17.jpg)
Mecanismos_07 (1)
26
MECANISMOS CAPÍTULO 7 154 7. TRENS DE ENGRENAGENS 7.1. Introdução a Trens de Engrenagens. Muitas vezes é necessário combinar diversas engrenagens e assim obter o que é conhecido como um trem de engrenagens. Dada a velocidade angular de entrada, é importante saber determinar facilmente a velocidade angular de saída e seu sentido de rotação. A relação entre as velocidades angulares de entrada e saída é conhecida como relação de velocidades angulares e é expressa como ω e / ω s . A Fig. 7.1 mostra um pinhão comandando uma engrenagem cilíndrica externa de dentes retos e uma interna. Em ambos os casos, a relação de velocidades angulares é inversamente proporcional ao número de dentes como indicado. As engrenagens externas giram em sentidos opostos e a interna no mesmo sentido de seu pinhão. Isto é indicado por um sinal menos na relação de velocidades do primeiro caso, e por um sinal mais no segundo. Até aqui não foi necessário apor um sinal algébrico à relação de velocidades de um par de engrenagens. Entretanto, quando se combinam engrenagens para formarem um trem de engrenagens, é importante considerar o sinal porque ele indica o sentido de rotação. Isto é especialmente verdadeiro na análise de trens de engrenagens planetárias. Ocasionalmente é necessário mudar o sentido de rotação de uma engrenagem sem variar sua velocidade angular. Isto pode ser feito colocando uma engrenagem intermediária entre a motora e a movida. Quando se usa uma engrenagem intermediária, muda-se o sentido de rotação, mas a relação de velocidades permanece a mesma. Figura 7.1 Pode-se mostrar que a relação de velocidades angulares de um trem de engrenagens, onde todas engrenagens têm eixos fixos de rotação, é o produto dos números de dentes de todas as engrenagens movidas dividido pelo produto dos números de dentes das motoras. Esta relação é dada sob forma de equação por motoras das dentes de números dos oduto movidas das dentes de números dos oduto movida motora s e Pr Pr = = ω ω ω ω (7.1) Para ilustrar o uso da Eq. 7.1, considere o trem de engrenagens da Fig. 7.2 onde as engrenagens 2 e 3 são montadas no mesmo eixo. A relação de velocidades é dada por 3 1 4 2 4 1 z z z z s e × × + = = ω ω ω ω O sinal positivo é determinado por observação. Pode-se mostrar facilmente que a equação anterior é correta 1 2 2 1 z z − = ω ω e 3 4 4 3 z z − = ω ω 3 4 1 2 4 3 2 1 z z z z × + = × ω ω ω ω
-
Upload
renan-algarves -
Category
Documents
-
view
241 -
download
1
Transcript of Mecanismos_07 (1)

7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 1/26
MECANISMOS CAPÍTULO 7
154
7. TRENS DE ENGRENAGENS
7.1. Introdução a Trens de Engrenagens. Muitas vezes é necessário combinar diversas
engrenagens e assim obter o que é conhecido como um trem de engrenagens. Dada a velocidadeangular de entrada, é importante saber determinar facilmente a velocidade angular de saída e seusentido de rotação. A relação entre as velocidades angulares de entrada e saída é conhecida comorelação de velocidades angulares e é expressa como ωe / ωs.
A Fig. 7.1 mostra um pinhão comandando uma engrenagem cilíndrica externa de dentes retos euma interna. Em ambos os casos, a relação de velocidades angulares é inversamente proporcional aonúmero de dentes como indicado. As engrenagens externas giram em sentidos opostos e a interna nomesmo sentido de seu pinhão. Isto é indicado por um sinal menos na relação de velocidades do primeirocaso, e por um sinal mais no segundo. Até aqui não foi necessário apor um sinal algébrico à relação develocidades de um par de engrenagens. Entretanto, quando se combinam engrenagens para formaremum trem de engrenagens, é importante considerar o sinal porque ele indica o sentido de rotação. Isto éespecialmente verdadeiro na análise de trens de engrenagens planetárias.
Ocasionalmente é necessário mudar o sentido de rotação de uma engrenagem sem variar suavelocidade angular. Isto pode ser feito colocando uma engrenagem intermediária entre a motora e amovida. Quando se usa uma engrenagem intermediária, muda-se o sentido de rotação, mas a relaçãode velocidades permanece a mesma.
Figura 7.1
Pode-se mostrar que a relação de velocidades angulares de um trem de engrenagens, onde todasengrenagens têm eixos fixos de rotação, é o produto dos números de dentes de todas as engrenagensmovidas dividido pelo produto dos números de dentes das motoras. Esta relação é dada sob forma deequação por
motorasdasdentesdenúmerosdosoduto
movidasdasdentesdenúmerosdosoduto
movida
motora
s
e
Pr
Pr ==
ω
ω
ω
ω (7.1)
Para ilustrar o uso da Eq. 7.1, considere o trem de engrenagens da Fig. 7.2 onde as engrenagens 2e 3 são montadas no mesmo eixo. A relação de velocidades é dada por
31
42
4
1
z z
z z
s
e
×
×+==
ω
ω
ω
ω
O sinal positivo é determinado por observação. Pode-se mostrar facilmente que a equação anterior écorreta
1
2
2
1
z
z −=
ω
ω e
3
4
4
3
z
z −=
ω
ω
3
4
1
2
4
3
2
1
z
z
z
z ×+=×
ω
ω
ω
ω
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 2/26
MECANISMOS CAPÍTULO 7
155
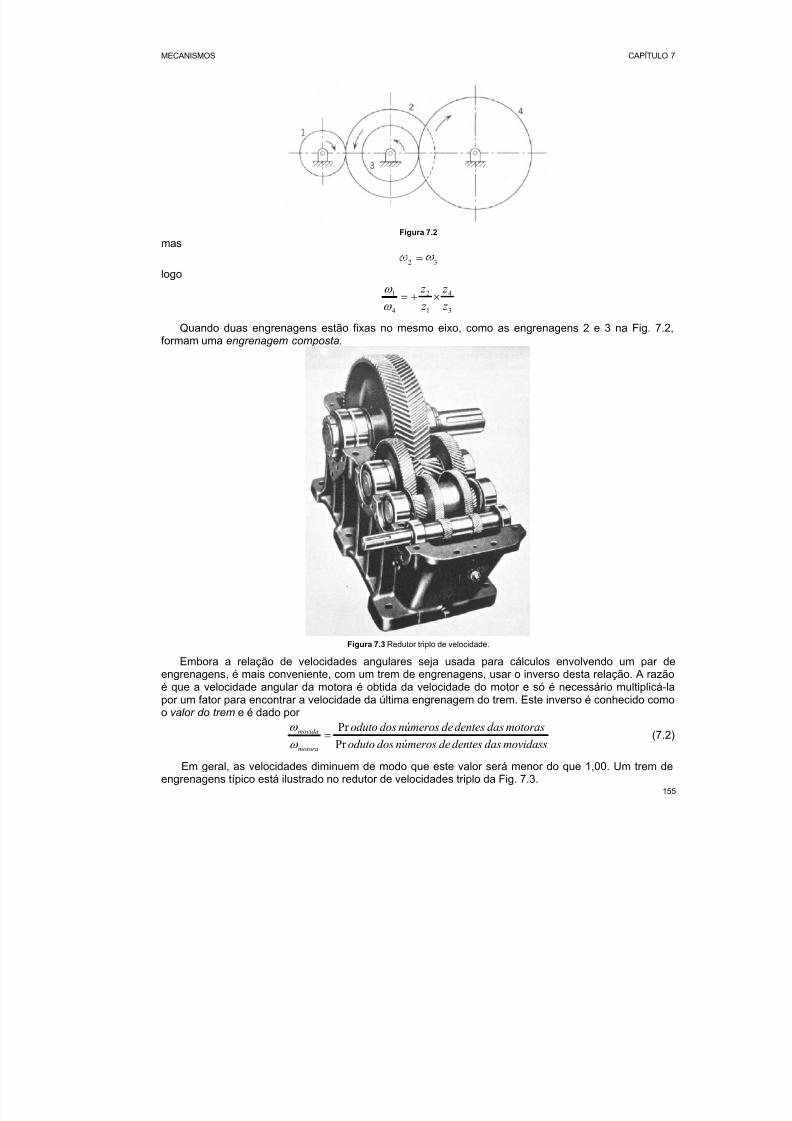
Figura 7.2
mas
32 =
logo
3
4
1
2
4
1
z
z
z
z ×+=
ω
ω
Quando duas engrenagens estão fixas no mesmo eixo, como as engrenagens 2 e 3 na Fig. 7.2,formam uma engrenagem composta.
Figura 7.3 Redutor triplo de velocidade.
Embora a relação de velocidades angulares seja usada para cálculos envolvendo um par deengrenagens, é mais conveniente, com um trem de engrenagens, usar o inverso desta relação. A razãoé que a velocidade angular da motora é obtida da velocidade do motor e só é necessário multiplicá-lapor um fator para encontrar a velocidade da última engrenagem do trem. Este inverso é conhecido comoo valor do trem e é dado por
movidassdasdentesdenúmerosdosoduto
motorasdasdentesdenúmerosdosoduto
motora
movida
Pr
Pr =
ω
ω (7.2)
Em geral, as velocidades diminuem de modo que este valor será menor do que 1,00. Um trem deengrenagens típico está ilustrado no redutor de velocidades triplo da Fig. 7.3.
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 3/26
MECANISMOS CAPÍTULO 7
156
7.2. Trens de Engrenagens Planetários. A fim de obter uma relação de engrenagens desejada, éfreqüentemente vantajoso projetar um trem de engrenagens tal que uma das engrenagens tenhamovimento planetário. Com este movimento, uma engrenagem não só gira em torno de seu centro,como este gira em torno de um outro.
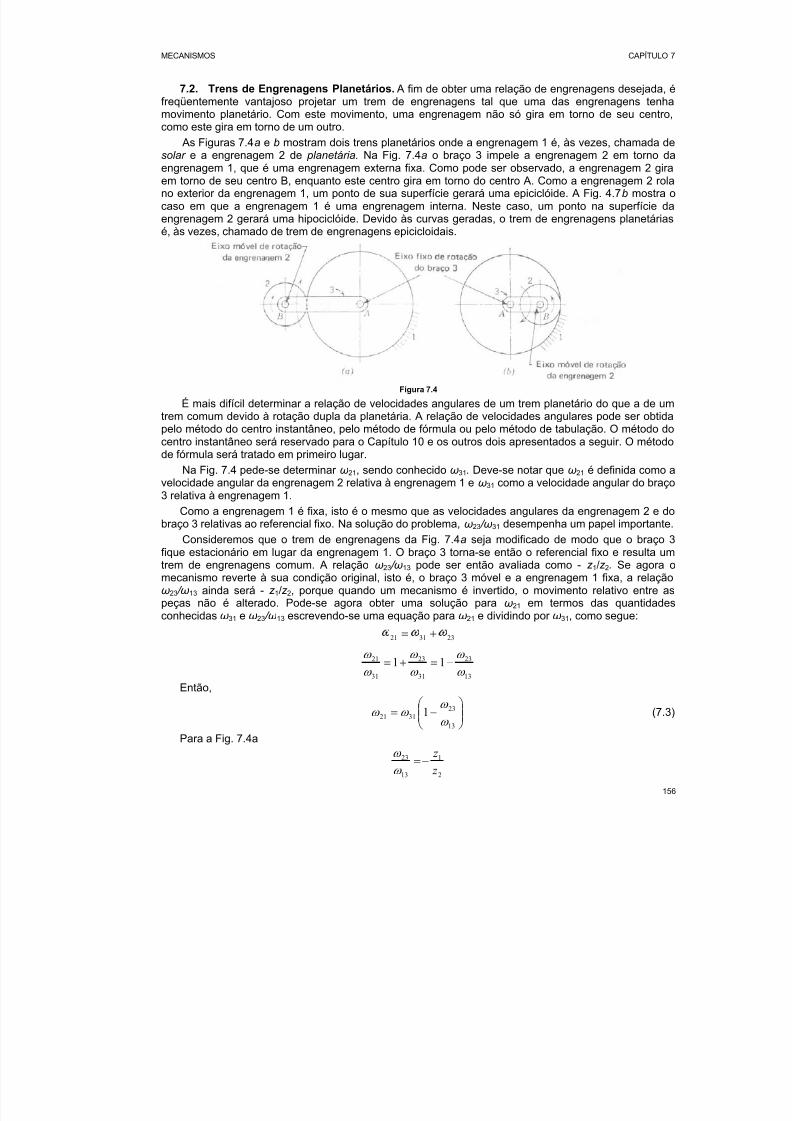
As Figuras 7.4a e b mostram dois trens planetários onde a engrenagem 1 é, às vezes, chamada desolar e a engrenagem 2 de planetária. Na Fig. 7.4a o braço 3 impele a engrenagem 2 em torno daengrenagem 1, que é uma engrenagem externa fixa. Como pode ser observado, a engrenagem 2 giraem torno de seu centro B, enquanto este centro gira em torno do centro A. Como a engrenagem 2 rolano exterior da engrenagem 1, um ponto de sua superfície gerará uma epiciclóide. A Fig. 4.7b mostra ocaso em que a engrenagem 1 é uma engrenagem interna. Neste caso, um ponto na superfície daengrenagem 2 gerará uma hipociclóide. Devido às curvas geradas, o trem de engrenagens planetáriasé, às vezes, chamado de trem de engrenagens epicicloidais.
Figura 7.4
É mais difícil determinar a relação de velocidades angulares de um trem planetário do que a de umtrem comum devido à rotação dupla da planetária. A relação de velocidades angulares pode ser obtidapelo método do centro instantâneo, pelo método de fórmula ou pelo método de tabulação. O método docentro instantâneo será reservado para o Capítulo 10 e os outros dois apresentados a seguir. O método
de fórmula será tratado em primeiro lugar.Na Fig. 7.4 pede-se determinar ω21, sendo conhecido ω31. Deve-se notar que ω21 é definida como avelocidade angular da engrenagem 2 relativa à engrenagem 1 e ω31 como a velocidade angular do braço3 relativa à engrenagem 1.
Como a engrenagem 1 é fixa, isto é o mesmo que as velocidades angulares da engrenagem 2 e dobraço 3 relativas ao referencial fixo. Na solução do problema, ω23 / ω31 desempenha um papel importante.
Consideremos que o trem de engrenagens da Fig. 7.4a seja modificado de modo que o braço 3fique estacionário em lugar da engrenagem 1. O braço 3 torna-se então o referencial fixo e resulta umtrem de engrenagens comum. A relação ω23 / ω13 pode ser então avaliada como - z 1/z 2. Se agora omecanismo reverte à sua condição original, isto é, o braço 3 móvel e a engrenagem 1 fixa, a relaçãoω23 / ω13 ainda será - z 1/z 2, porque quando um mecanismo é invertido, o movimento relativo entre aspeças não é alterado. Pode-se agora obter uma solução para ω21 em termos das quantidades
conhecidas ω31 e ω23 / ω13 escrevendo-se uma equação para ω21 e dividindo por ω31, como segue:
233121 +=
13
23
31
23
31
21 11ω
ω
ω
ω
ω
ω −=+=
Então,
−=
13
23
3121 1ω
ω ω ω (7.3)
Para a Fig. 7.4a
2
1
13
23
z
z −=
ω
ω

7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 4/26
MECANISMOS CAPÍTULO 7
157
e
+=
2
1
3121 1 z
z ω ω (7.3a)
Para a Fig. 7.4b
2
1
13
23
z z +=
ω
ω
e
−=
2
1
3121 1 z
z ω ω (7.3b)
Da comparação das Equações 7.3a e b observa-se porque é importante que o sinal algébricocorreto de ω23 / ω13 seja substituído na equação 7.3.
Consideremos a seguir o caso em que todas as engrenagens, bem como o braço, giram. Isto estáilustrado na Fig. 7.5, onde ω31 e ω41 são conhecidas e pede-se determinar ω21. Ao resolver esteproblema ω24 / ω34 é a relação-chave porque é a relação de velocidades das engrenagens referidas ao
braço e pode ser calculada facilmente. Pode-se escrever equações para ω24 e ω34 e combiná-las demodo que a relação ω24 / ω34 apareça. Isto está ilustrado a seguir.
412124 −=
413134 −=
Dividindo a primeira equação pela segunda,
4113
4121
34
24
ω ω
ω ω
ω
ω
−
−=
( ) 41214131
34
24ω ω ω ω
ω
ω −=−
−+
=
34
24
4131
34
24
21 1ω
ω ω ω
ω
ω ω
Mas,
2
3
34
24
z
z =
ω
ω
então,
++
−=
2
3
4131
2
3
21 1 z
z
z
z ω ω ω (7.4)
Na dedução das Equações 7.3 e 7.4, viu-se que, em cada caso a relação de velocidades angularesrelativas ao braço foi obtida em primeiro lugar e depois foram escritas e combinadas as equações develocidades relativas para conterem esta relação. Embora este método seja básico, significa que deveser desenvolvida uma nova equação para cada sistema planetário encontrado. A fim de evitar repetição,é possível a dedução de uma equação geral que possa ser aplicada a qualquer trem de engrenagensplanetárias.
Figura 7.5

7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 5/26
MECANISMOS CAPÍTULO 7
158
Consideremos novamente a Fig. 7.5 e as equações
412124 −=
413134 −=
e
4113
4121
34
24
ω ω
ω ω
ω
ω
−−=
Se na Fig. 7.5 a engrenagem 3 for considerada a primeira e a engrenagem 2 a última engrenagem,a equação anterior pode ser escrita como
B P
BU
PB
UB
ω ω
ω ω
ω
ω
−
−= (7.5)
onde
= PB
UB
ω
ω relação de velocidades entre a última e a primeira engrenagens, ambas ao braço.
ωU = velocidade angular da última engrenagem do trem, relativa à peça fixa.
ωB = velocidade angular do braço relativa à peça fixa.
ωP = velocidade angular da primeira engrenagem relativa à peça fixa.
Ao se utilizar a Eq. 7.5, deve-se enfatizar que a primeira engrenagem e a última devem serengrenagens que se acoplem com engrenagem ou engrenagens que tenham movimento planetário.
Além disso, devem estar em eixos paralelos porque as velocidades angulares não podem ser tratadasalgebricamente, a menos que os vetores que as representem sejam paralelos.
Agora a Eq. 7.5 será usada para escrever a equação do trem de engrenagens da Fig. 7.4a.Considerando a engrenagem 1 como a primeira e a engrenagem 2 como a última:
B P
BU
PB
UB
ω ω
ω ω
ω
ω
−
−=
2
1
13
23
z
z
PB
UB −==ω
ω
ω
ω
21=U
31= B
01 == P
Substituindo estes valores
31
3121
2
1
0 ω
ω ω
−
−
=− z
z
31
2
1
3121 ω ω ω
=−
z
z
e
+=
2
1
3121 1 z
z ω ω
o que concorda com a Eq. 7.3a. A aplicação da Eq. 7.5 a um trem mais complicado é feita no exemploseguinte.
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 6/26
MECANISMOS CAPÍTULO 7
159
Exemplo 7.1
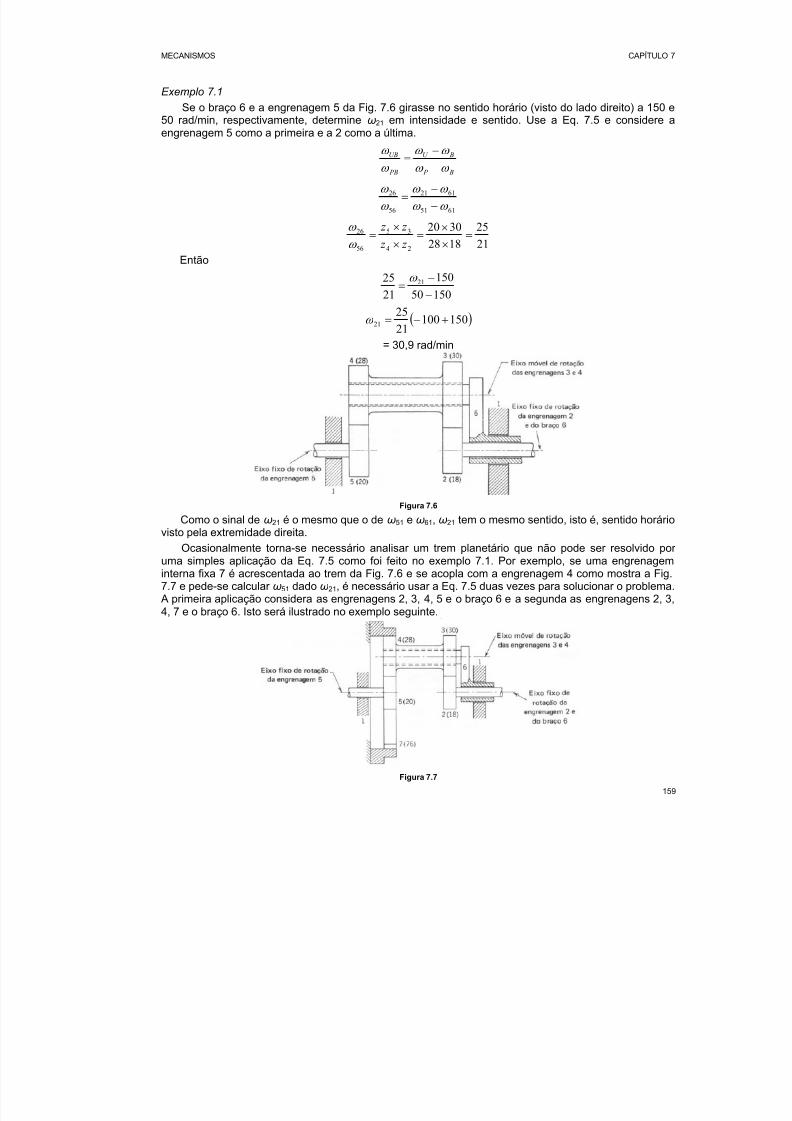
Se o braço 6 e a engrenagem 5 da Fig. 7.6 girasse no sentido horário (visto do lado direito) a 150 e50 rad/min, respectivamente, determine ω21 em intensidade e sentido. Use a Eq. 7.5 e considere aengrenagem 5 como a primeira e a 2 como a última.
B P
BU
PB
UB
ω ω ω ω
ω ω
−−=
6151
6121
56
26
ω ω
ω ω
ω
ω
−
−=
21
25
1828
3020
24
35
56
26 =×
×=
×
×=
z z
z z
ω
ω
Então
15050
150
21
25 21
−
−= ω
( )15010021
2521 +−=ω
= 30,9 rad/min
Figura 7.6
Como o sinal de ω21 é o mesmo que o de ω51 e ω61, ω21 tem o mesmo sentido, isto é, sentido horáriovisto pela extremidade direita.
Ocasionalmente torna-se necessário analisar um trem planetário que não pode ser resolvido poruma simples aplicação da Eq. 7.5 como foi feito no exemplo 7.1. Por exemplo, se uma engrenageminterna fixa 7 é acrescentada ao trem da Fig. 7.6 e se acopla com a engrenagem 4 como mostra a Fig.7.7 e pede-se calcular ω51 dado ω21, é necessário usar a Eq. 7.5 duas vezes para solucionar o problema.
A primeira aplicação considera as engrenagens 2, 3, 4, 5 e o braço 6 e a segunda as engrenagens 2, 3,
4, 7 e o braço 6. Isto será ilustrado no exemplo seguinte.
Figura 7.7

7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 7/26
MECANISMOS CAPÍTULO 7
160
Exemplo 7.2
Se ω21 gira no sentido anti-horário (visto da extremidade direta) a 60 rad/min, determine ω51 e seusentido de rotação.
Considerando primeiramente as engrenagens 2, 3, 4, 5 e o braço 6, seja a engrenagem 2 a primeirae a 5 a última.
B P
BU
PB
UB
ω ω
ω ω
ω
ω
−
−=
6121
6151
26
56
ω ω
ω ω
ω
ω
−
−=
25
21
2030
2818
53
42
26
56 =×
×=
×
×=
z z
z z
ω
ω
Então,
61
6151
6121
6151
6025
21
ω
ω ω
ω ω
ω ω
−
−=
−
−= (a)
Entretanto, a Eq. (a) não pode ser resolvida porque contém duas incógnitas, ω51 e ω61. É necessárioconsiderar agora as engrenagens 2, 3, 4, 7 e o braço 6, sendo a engrenagem 2 a primeira e a 7 a última.
6121
6171
26
76
ω ω
ω ω
ω
ω
−
−=
95
21
7630
2818
73
42
26
76 −=×
×−=
×
×−=
z z
z z
ω
ω
61
61
6121
6171
60
0
95
21
ω
ω
ω ω
ω ω
−
−=
−
−=− (b)
Resolvendo a Eq. (b) para ω61
( ) 6161 06095
21ω ω −=−−
86,1029
152161 +=
×=ω rad/min
Da Eq. (a)
( ) 6151616025
21ω ω ω −=−
( ) 86,1086,106025
2151 −=− ω
Então, ω51 = + 52,14 rad/min e o sentido de rotação é o mesmo de ω21.
Exemplo 7.3
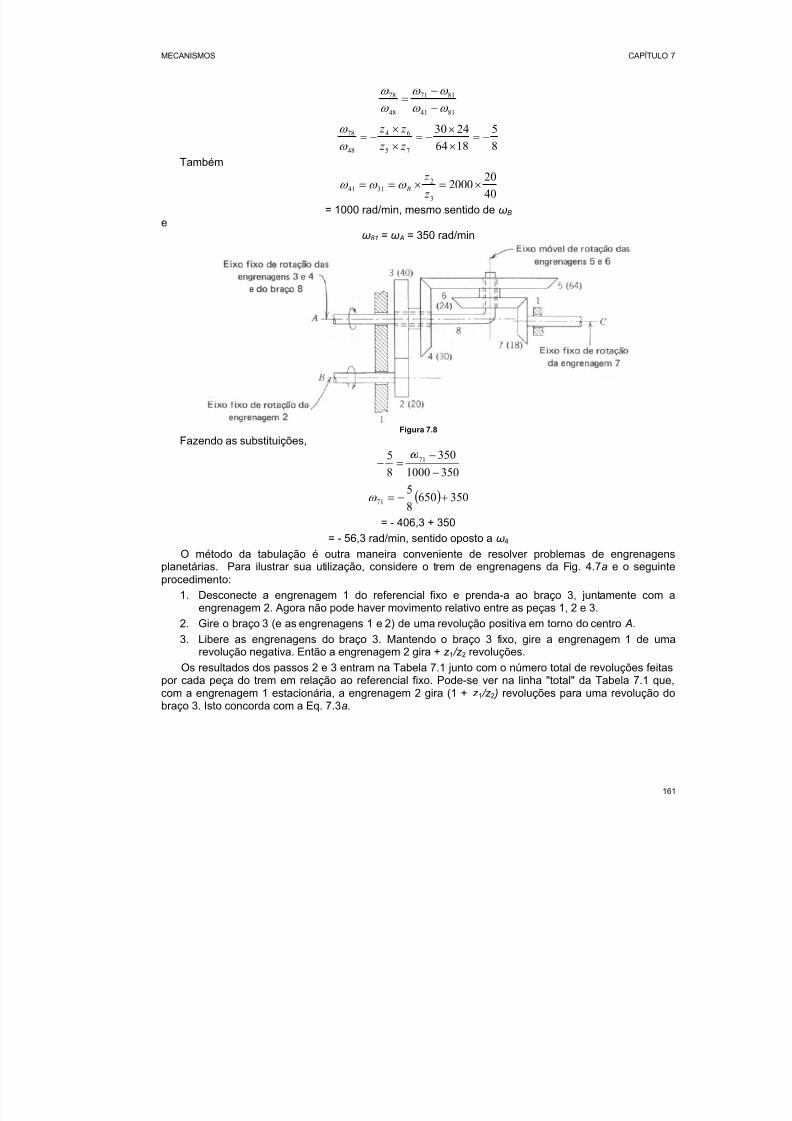
Considere que no diferencial mostrado na Fig. 7.8, a velocidade angular do eixo A é 350 rad/min nosentido indicado e que a do eixo B é 2000 rad/min. Determine a velocidade angular do eixo C .
Use a Eq. 7.5 e lembre-se que a primeira e a última engrenagens selecionadas para a equaçãodevem acoplar-se com as engrenagens que têm movimento planetário. Sendo a engrenagem 4 aprimeira e a 7 a última:
B P
BU
PB
UB
ω ω
ω ω
ω
ω
−
−=
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 8/26
MECANISMOS CAPÍTULO 7
161
8141
8171
48
78
ω ω
ω ω
ω
ω
−
−=
8
5
1864
2430
75
64
48
78 −=×
×−=
×
×−=
z z
z z
ω
ω
Também
40
202000
3
2
3141 ×=×== z
z Bω ω ω
= 1000 rad/min, mesmo sentido de ωB e
ω81 = ω A = 350 rad/min
Figura 7.8
Fazendo as substituições,
3501000350
85 71
−
−=−
( ) 3506508
571 +−=ω
= - 406,3 + 350
= - 56,3 rad/min, sentido oposto a ω4
O método da tabulação é outra maneira conveniente de resolver problemas de engrenagensplanetárias. Para ilustrar sua utilização, considere o trem de engrenagens da Fig. 4.7a e o seguinteprocedimento:
1. Desconecte a engrenagem 1 do referencial fixo e prenda-a ao braço 3, juntamente com a
engrenagem 2. Agora não pode haver movimento relativo entre as peças 1, 2 e 3.2. Gire o braço 3 (e as engrenagens 1 e 2) de uma revolução positiva em torno do centro A.
3. Libere as engrenagens do braço 3. Mantendo o braço 3 fixo, gire a engrenagem 1 de umarevolução negativa. Então a engrenagem 2 gira + z 1 /z 2 revoluções.
Os resultados dos passos 2 e 3 entram na Tabela 7.1 junto com o número total de revoluções feitaspor cada peça do trem em relação ao referencial fixo. Pode-se ver na linha "total" da Tabela 7.1 que,com a engrenagem 1 estacionária, a engrenagem 2 gira (1 + z 1 /z 2 ) revoluções para uma revolução dobraço 3. Isto concorda com a Eq. 7.3a.
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 9/26
MECANISMOS CAPÍTULO 7
162
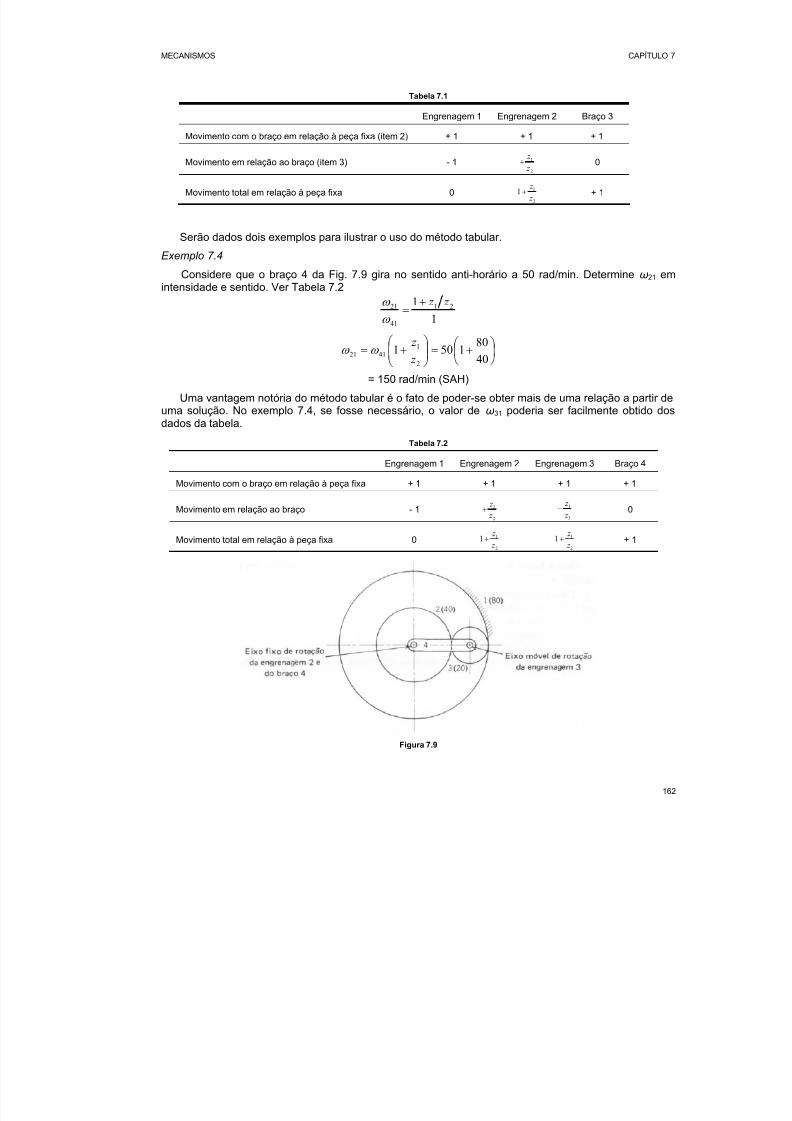
Tabela 7.1
Engrenagem 1 Engrenagem 2 Braço 3
Movimento com o braço em relação à peça fixa (item 2) + 1 + 1 + 1
Movimento em relação ao braço (item 3) - 12
1
z
z + 0
Movimento total em relação à peça fixa 02
11 z
z +
+ 1
Serão dados dois exemplos para ilustrar o uso do método tabular.
Exemplo 7.4
Considere que o braço 4 da Fig. 7.9 gira no sentido anti-horário a 50 rad/min. Determine ω21 emintensidade e sentido. Ver Tabela 7.2
11 21
41
21 z z +
=ω
ω
+=
+=
40
801501
2
1
4121 z
z ω ω
= 150 rad/min (SAH)
Uma vantagem notória do método tabular é o fato de poder-se obter mais de uma relação a partir deuma solução. No exemplo 7.4, se fosse necessário, o valor de ω31 poderia ser facilmente obtido dosdados da tabela.
Tabela 7.2
Engrenagem 1 Engrenagem 2 Engrenagem 3 Braço 4
Movimento com o braço em relação à peça fixa + 1 + 1 + 1 + 1
Movimento em relação ao braço - 12
1
z
z +
3
1
z
z −
0
Movimento total em relação à peça fixa 02
11 z
z +
2
11 z
z +
+ 1
Figura 7.9
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 10/26
MECANISMOS CAPÍTULO 7
163
Exemplo 7.5
O exemplo 7.1 e a Fig. 7.6 serão agora resolvidos pelo método tabular. Como todas as engrenagensdeste trem giram, é mais fácil trabalhar com as velocidades reais da engrenagem 5 e do braço 6, emlugar de uma revolução como no exemplo 7.4. Como o braço 6 gira a 150 rad/min, este deve ser onúmero de giros ao qual o trem inteiro é sujeito quando bloqueado para a linha 1 da Tabela 7.3 (por
causa do zero para o braço 6 na linha 2). Com + 150 para a engrenagem 5 na linha 1, deve-se inserir -100 na linha 2 para a engrenagem 5, a fim de ser obtido o total correto de + 50. Com o braço 6estacionário, na linha 2, e a engrenagem 5 girando uma quantidade conhecida, pode-se facilmentedeterminar, para esta linha, a rotação das engrenagens 2, 3 e 4.
×
×−=
×
×−=
1828
3020100150100150
24
35
21 z z
z z ω
21
25100150 ×−=
= + 30,9 rad/min (SH)
O exemplo 7.3 também pode ser facilmente resolvido usando-se o método de tabulação.
Tabela 7.3
Engrenagem 2 Engrenagem 3 Engrenagem 4 Engrenagem 5 Braço 6
Movimento com o braço emrelação à peça fixa
+ 150 + 150 + 150 + 150 + 150
Movimento em relação ao braço24
35100 z z
z z
×
×−
4
5100 z
z +
4
5100 z
z +
-100 0
Movimento total em relação àpeça fixa
24
35100150 z z
z z
×
×−
+ 50 + 150
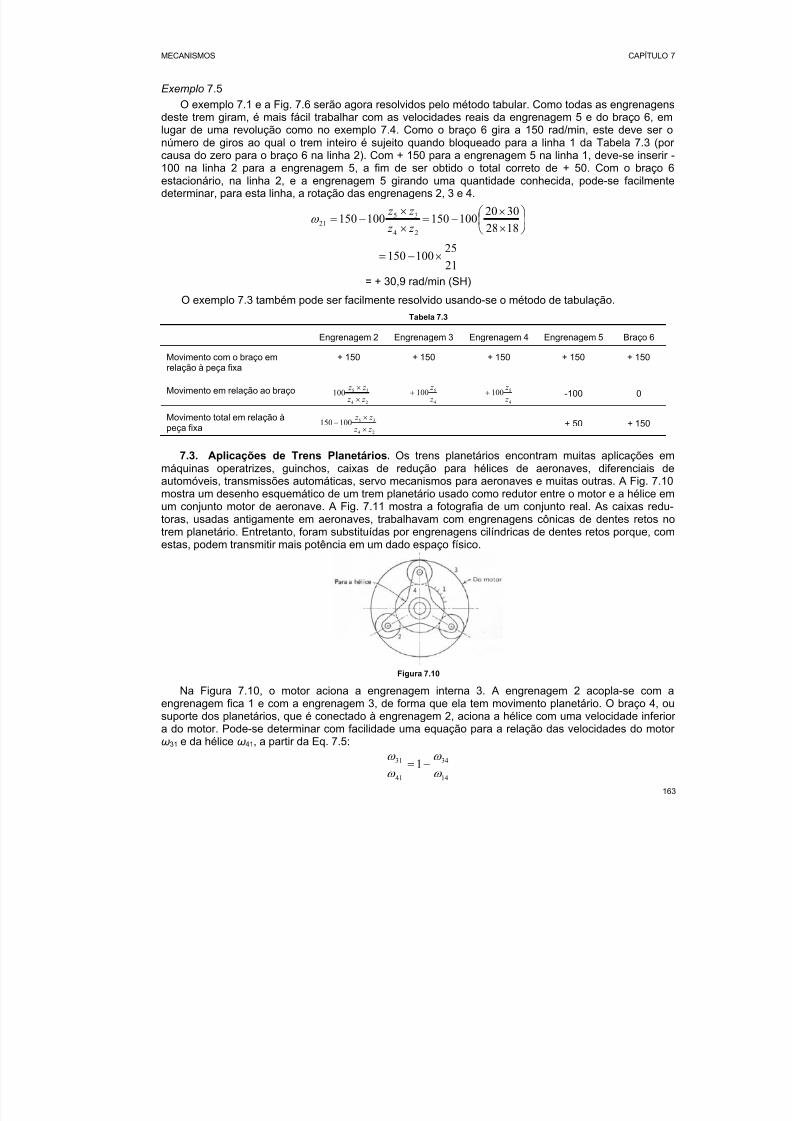
7.3. Aplicações de Trens Planetários. Os trens planetários encontram muitas aplicações emmáquinas operatrizes, guinchos, caixas de redução para hélices de aeronaves, diferenciais deautomóveis, transmissões automáticas, servo mecanismos para aeronaves e muitas outras. A Fig. 7.10mostra um desenho esquemático de um trem planetário usado como redutor entre o motor e a hélice emum conjunto motor de aeronave. A Fig. 7.11 mostra a fotografia de um conjunto real. As caixas redu-toras, usadas antigamente em aeronaves, trabalhavam com engrenagens cônicas de dentes retos notrem planetário. Entretanto, foram substituídas por engrenagens cilíndricas de dentes retos porque, comestas, podem transmitir mais potência em um dado espaço físico.
Figura 7.10
Na Figura 7.10, o motor aciona a engrenagem interna 3. A engrenagem 2 acopla-se com aengrenagem fica 1 e com a engrenagem 3, de forma que ela tem movimento planetário. O braço 4, ousuporte dos planetários, que é conectado à engrenagem 2, aciona a hélice com uma velocidade inferiora do motor. Pode-se determinar com facilidade uma equação para a relação das velocidades do motorω31 e da hélice ω41, a partir da Eq. 7.5:
14
34
41
31
1 ω
ω
ω
ω
−=
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 11/26
MECANISMOS CAPÍTULO 7
164
onde
3
1
14
34
z
z −=
ω
ω
Então,
2
1
41
31 1 z z +=
ω
ω
É interessante observar que seria impossível obter uma relação de velocidades tão alta quanto 2:1,porque isto significaria que a engrenagem 1 teria que ter o mesmo número de dentes da engrenagem 3,o que seria impossível. Ao se determinar a relação de velocidades limite para um dado redutor, deve-seobservar que todas as engrenagens tem que ter o mesmo diametral pitch.
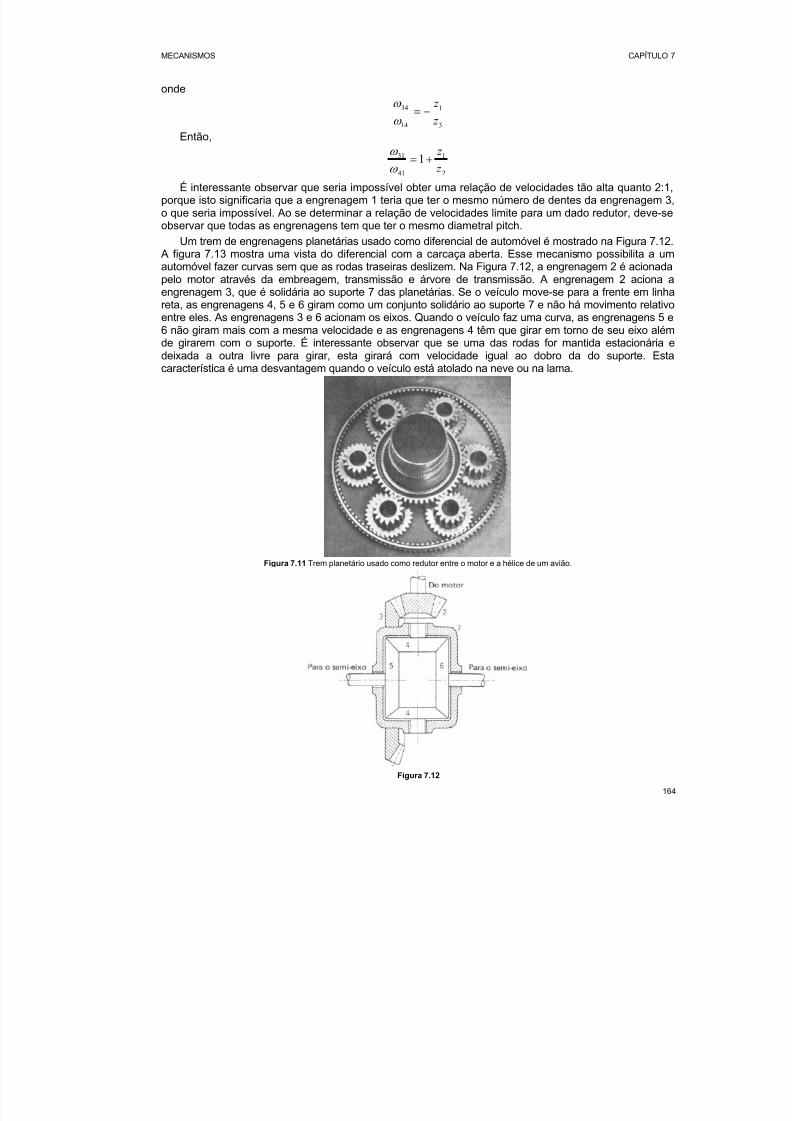
Um trem de engrenagens planetárias usado como diferencial de automóvel é mostrado na Figura 7.12. A figura 7.13 mostra uma vista do diferencial com a carcaça aberta. Esse mecanismo possibilita a umautomóvel fazer curvas sem que as rodas traseiras deslizem. Na Figura 7.12, a engrenagem 2 é acionadapelo motor através da embreagem, transmissão e árvore de transmissão. A engrenagem 2 aciona aengrenagem 3, que é solidária ao suporte 7 das planetárias. Se o veículo move-se para a frente em linha
reta, as engrenagens 4, 5 e 6 giram como um conjunto solidário ao suporte 7 e não há movimento relativoentre eles. As engrenagens 3 e 6 acionam os eixos. Quando o veículo faz uma curva, as engrenagens 5 e6 não giram mais com a mesma velocidade e as engrenagens 4 têm que girar em torno de seu eixo alémde girarem com o suporte. É interessante observar que se uma das rodas for mantida estacionária edeixada a outra livre para girar, esta girará com velocidade igual ao dobro da do suporte. Estacaracterística é uma desvantagem quando o veículo está atolado na neve ou na lama.
Figura 7.11 Trem planetário usado como redutor entre o motor e a hélice de um avião.
Figura 7.12
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 12/26
MECANISMOS CAPÍTULO 7
165
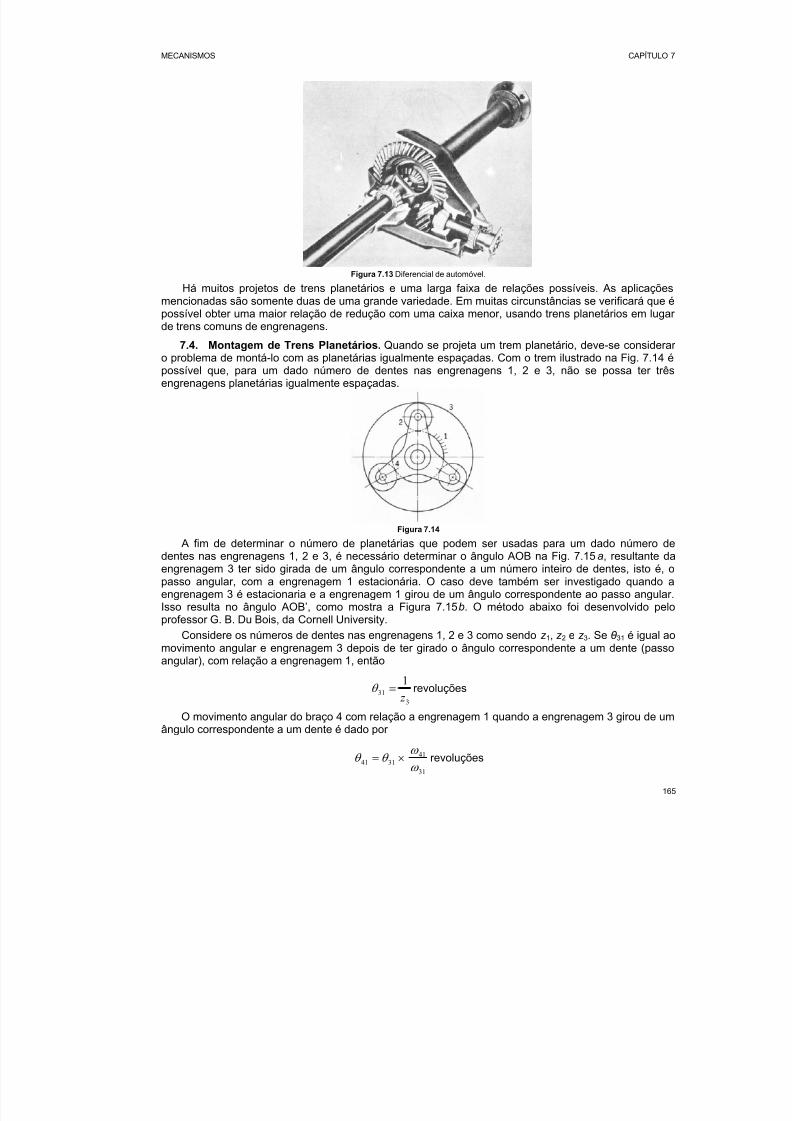
Figura 7.13 Diferencial de automóvel.
Há muitos projetos de trens planetários e uma larga faixa de relações possíveis. As aplicações
mencionadas são somente duas de uma grande variedade. Em muitas circunstâncias se verificará que épossível obter uma maior relação de redução com uma caixa menor, usando trens planetários em lugarde trens comuns de engrenagens.
7.4. Montagem de Trens Planetários. Quando se projeta um trem planetário, deve-se consideraro problema de montá-lo com as planetárias igualmente espaçadas. Com o trem ilustrado na Fig. 7.14 épossível que, para um dado número de dentes nas engrenagens 1, 2 e 3, não se possa ter trêsengrenagens planetárias igualmente espaçadas.
Figura 7.14
A fim de determinar o número de planetárias que podem ser usadas para um dado número dedentes nas engrenagens 1, 2 e 3, é necessário determinar o ângulo AOB na Fig. 7.15a, resultante daengrenagem 3 ter sido girada de um ângulo correspondente a um número inteiro de dentes, isto é, opasso angular, com a engrenagem 1 estacionária. O caso deve também ser investigado quando aengrenagem 3 é estacionaria e a engrenagem 1 girou de um ângulo correspondente ao passo angular.Isso resulta no ângulo AOB’, como mostra a Figura 7.15b. O método abaixo foi desenvolvido peloprofessor G. B. Du Bois, da Cornell University.
Considere os números de dentes nas engrenagens 1, 2 e 3 como sendo z 1, z 2 e z 3. Se θ 31 é igual aomovimento angular e engrenagem 3 depois de ter girado o ângulo correspondente a um dente (passoangular), com relação a engrenagem 1, então
3
31
1
z =θ revoluções
O movimento angular do braço 4 com relação a engrenagem 1 quando a engrenagem 3 girou de umângulo correspondente a um dente é dado por
31
41
3141
ω
ω θ θ ×= revoluções

7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 13/26
MECANISMOS CAPÍTULO 7
166
Figura 7.15
Da análise de velocidades do trem planetário da Fig. 7.10, que é idêntico ao que está sobconsideração,
13
3
31
41
z z
z
+=
ω
ω
Então
1313
3
3
41
11
z z z z
z
z +=
+×=θ revoluções
O ângulo AOB é descrito pelo braço 4 quando a engrenagem 3 se move relativamente aengrenagem 1. Se a engrenagem 3 gira o correspondente ao passo angular, o ângulo AOB é igual a θ 41.Esse é o menor ângulo possível entre engrenagens planetárias se lhes for permitida superposição. Se aengrenagem 3 gira o correspondente a um número inteiro de dentes c , então
( )13
41 z z
cc AOB
+== θ revoluções
e representa o ângulo entre planetários com possível superposição.Consideremos a seguir o caso da Fig. 7.15b, onde a engrenagem 1 girou o correspondente ao
passo angular com a engrenagem 3 estacionária, e pede-se determinar o ângulo AOB'. Se θ 13 é igual aomovimento angular da engrenagem 1 após ter girado um passo angular e θ 43 é igual ao movimentoresultante do braço 4 (ambos relativos a engrenagem 3), então
1
13
1
z =θ
13
43
1343ω
ω θ θ ×=
Mas pode-se deduzir facilmente que
31
1
13
43
z z z +
=ω
ω
Portanto,
3131
1
1
43
11
z z z z
z
z +=
+×=θ
( )31
43' z z
cc AOB
+== θ (7.7)
Comparando as Equações 7.5 e 7.7 pode-se observar que o braço 4 gira do mesmo ângulo,indiferentemente se é a engrenagem 3 ou 1 que gira ou um mais passos angulares.
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 14/26
MECANISMOS CAPÍTULO 7
167
Se o ângulo AOB é a fração de uma revolução entre planetárias, seu inverso será o número deplanetárias. Tomando o inverso da Eq. 7.6, é possível obter uma expressão para o número deplanetárias igualmente espaçadas em torno da engrenagem 1. Se n apresenta o número de planetárias,então:
c z z n 13
+= (7.8)
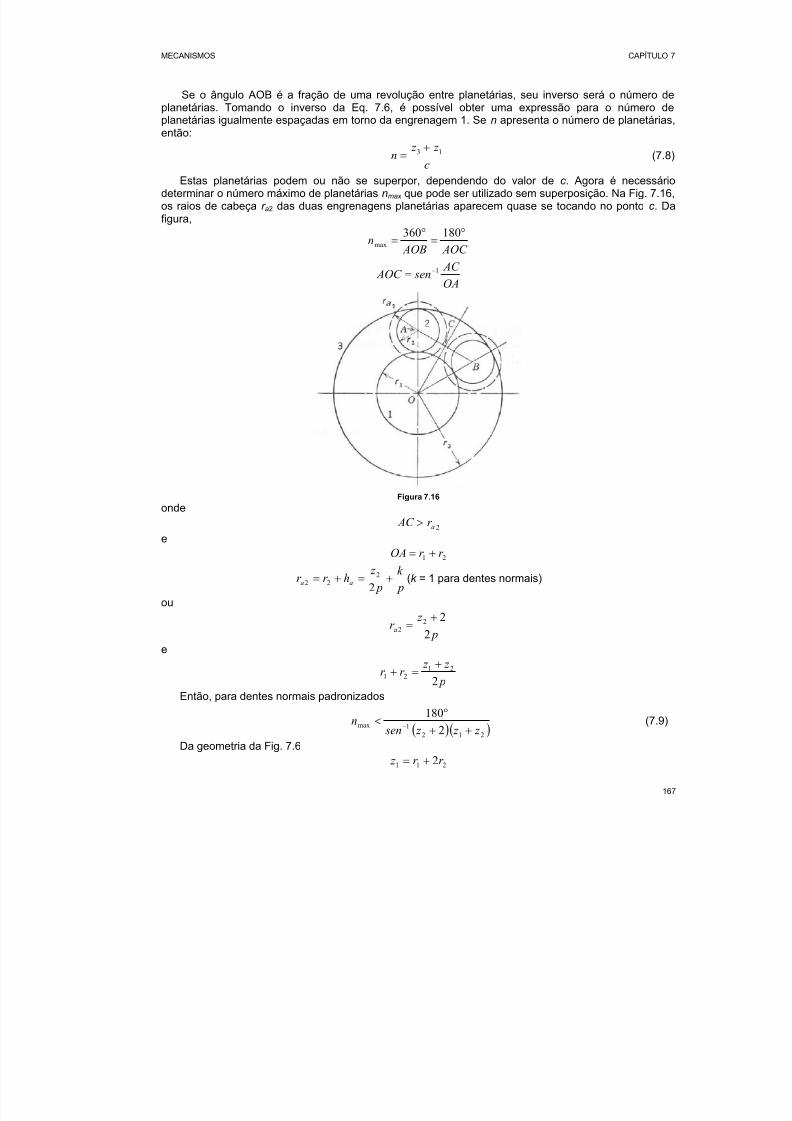
Estas planetárias podem ou não se superpor, dependendo do valor de c . Agora é necessáriodeterminar o número máximo de planetárias nmax que pode ser utilizado sem superposição. Na Fig. 7.16,os raios de cabeça r a2 das duas engrenagens planetárias aparecem quase se tocando no ponto c . Dafigura,
AOC AOBn
°=
°=
180360max
OA
AC sen AOC 1−=
Figura 7.16
onde
2ar AC >
e
21 r r OA +=
p
k
p
z hr r aa +=+=
2
2
22 (k = 1 para dentes normais)
ou
p
z r a
2
22
2+=
e
p
z z r r
2
21
21
+=+
Então, para dentes normais padronizados
( )( )212
1max2
180
z z z senn
++
°<
− (7.9)
Da geometria da Fig. 7.6
211 2
r r z +=
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 15/26
MECANISMOS CAPÍTULO 7
168
Como r = z/2p, para uma engrenagem padronizada, e como os passos diametrais das engrenagens1, 2 e 3 são iguais
213 2 z z z +=
Para engrenagens não padronizadas, a Eq. 7.9 pode ser usada para dar um valor aproximado de
nmax . Neste caso o valor fracionário de z 2 resultante do emprego da equação padronizada
2
13
3
z z z
−=
seria substituído na Eq. 7.9. Como conferência final, deve-se fazer um esboço do conjunto.
Exemplo 7.6
Em um trem planetário semelhante ao da Fig. 7.14, a engrenagem 1 tem 50 e a 3 tem 90 dentes.Determine o número de planetárias igualmente espaçadas que pode ser usado sem superposição. Asengrenagens são padronizadas.
202
5090
2
13
2 =
−
=
−
=
z z
z
( ) ( ) ( ) ( )2050/220
180
/2
1801
212
1max++
°=
++
°=
−− sen z z z senn = 9,8 planetárias
Portanto, o número de planetárias no trem de engrenagens não pode exceder 9.
ccc
z z n
140509013 =+
=+
=
O valor de c deve ser o número de passos angulares entre planetárias tal que, quando dividindo 140dê um número inteiro 11. Para este caso c pode ser 140, 70, 35, 28 ou 20. Portanto,
n = 1, 2, 4, 5 ou 7 planetárias igualmente espaçadas.
Problemas
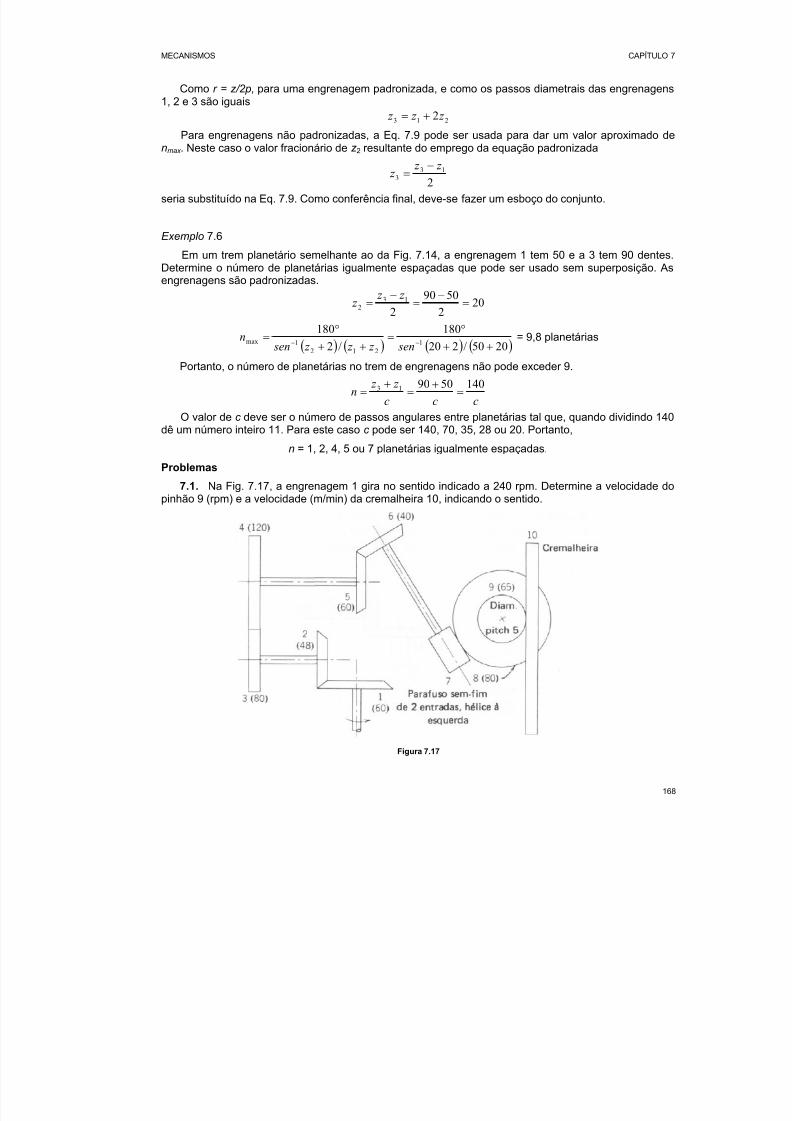
7.1. Na Fig. 7.17, a engrenagem 1 gira no sentido indicado a 240 rpm. Determine a velocidade dopinhão 9 (rpm) e a velocidade (m/min) da cremalheira 10, indicando o sentido.
Figura 7.17
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 16/26
MECANISMOS CAPÍTULO 7
169
7.2. Um guincho é operado por um motor que aciona um parafuso sem-fim de 4 entradas que seengrena com uma coroa de 100 dentes. A coroa é enchavetada em um eixo que também tem um pinhãocilíndrico de dentes retos com 20 dentes. O pinhão se acopla com uma engrenagem cilíndrica de dentesretos montada na extremidade do tambor do guincho. Faça um esboço do conjunto e calcule avelocidade do tambor no caso do motor girar a 660 rpm e o tambor ter um diâmetro de 12 pol.
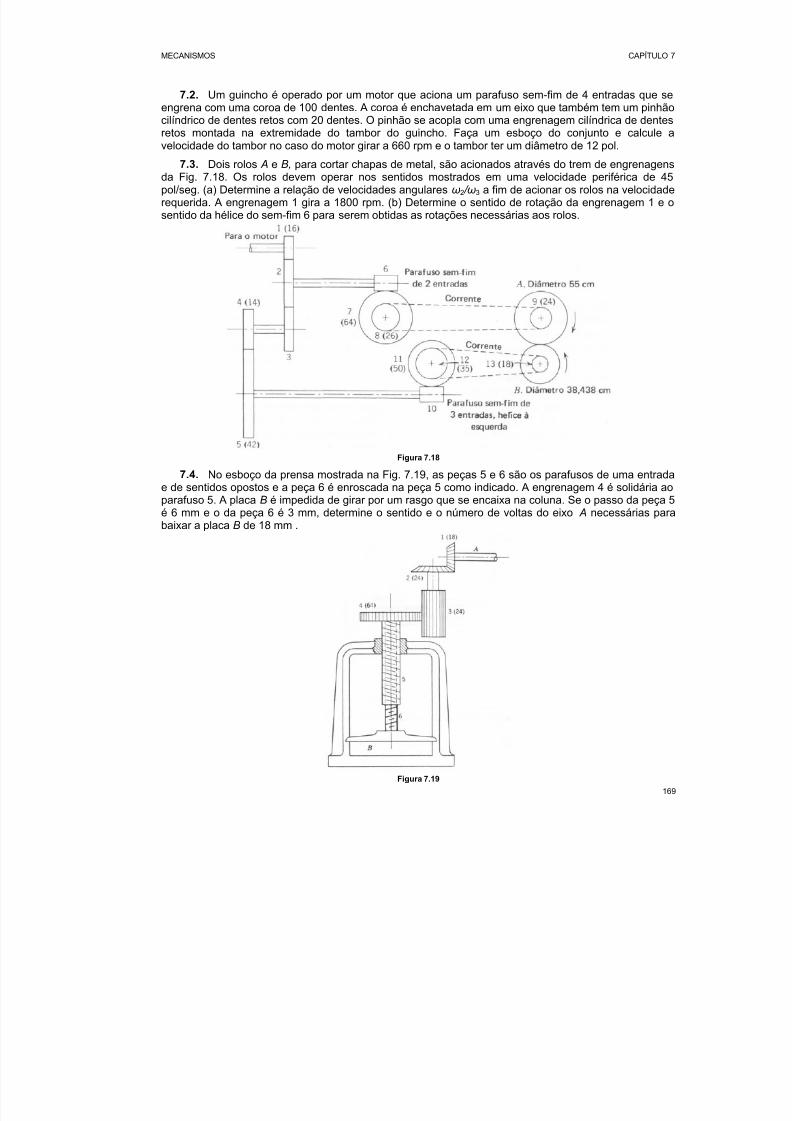
7.3. Dois rolos A e B, para cortar chapas de metal, são acionados através do trem de engrenagensda Fig. 7.18. Os rolos devem operar nos sentidos mostrados em uma velocidade periférica de 45pol/seg. (a) Determine a relação de velocidades angulares ω2 / ω3 a fim de acionar os rolos na velocidaderequerida. A engrenagem 1 gira a 1800 rpm. (b) Determine o sentido de rotação da engrenagem 1 e osentido da hélice do sem-fim 6 para serem obtidas as rotações necessárias aos rolos.
Figura 7.18 7.4. No esboço da prensa mostrada na Fig. 7.19, as peças 5 e 6 são os parafusos de uma entrada
e de sentidos opostos e a peça 6 é enroscada na peça 5 como indicado. A engrenagem 4 é solidária aoparafuso 5. A placa B é impedida de girar por um rasgo que se encaixa na coluna. Se o passo da peça 5é 6 mm e o da peça 6 é 3 mm, determine o sentido e o número de voltas do eixo A necessárias parabaixar a placa B de 18 mm .
Figura 7.19
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 17/26
MECANISMOS CAPÍTULO 7
170
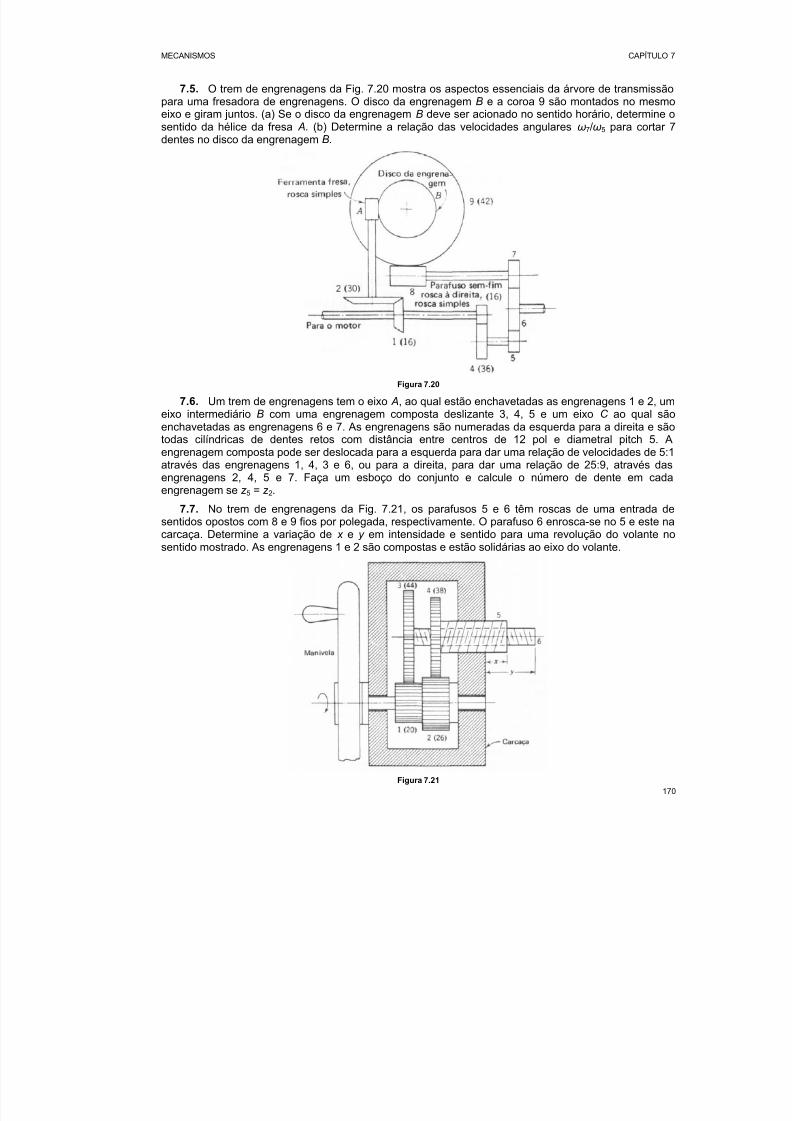
7.5. O trem de engrenagens da Fig. 7.20 mostra os aspectos essenciais da árvore de transmissãopara uma fresadora de engrenagens. O disco da engrenagem B e a coroa 9 são montados no mesmoeixo e giram juntos. (a) Se o disco da engrenagem B deve ser acionado no sentido horário, determine osentido da hélice da fresa A. (b) Determine a relação das velocidades angulares ω7/ω5 para cortar 7dentes no disco da engrenagem B.
Figura 7.20
7.6. Um trem de engrenagens tem o eixo A, ao qual estão enchavetadas as engrenagens 1 e 2, umeixo intermediário B com uma engrenagem composta deslizante 3, 4, 5 e um eixo C ao qual sãoenchavetadas as engrenagens 6 e 7. As engrenagens são numeradas da esquerda para a direita e sãotodas cilíndricas de dentes retos com distância entre centros de 12 pol e diametral pitch 5. Aengrenagem composta pode ser deslocada para a esquerda para dar uma relação de velocidades de 5:1através das engrenagens 1, 4, 3 e 6, ou para a direita, para dar uma relação de 25:9, através dasengrenagens 2, 4, 5 e 7. Faça um esboço do conjunto e calcule o número de dente em cadaengrenagem se z 5 = z 2.
7.7. No trem de engrenagens da Fig. 7.21, os parafusos 5 e 6 têm roscas de uma entrada desentidos opostos com 8 e 9 fios por polegada, respectivamente. O parafuso 6 enrosca-se no 5 e este nacarcaça. Determine a variação de x e y em intensidade e sentido para uma revolução do volante nosentido mostrado. As engrenagens 1 e 2 são compostas e estão solidárias ao eixo do volante.
Figura 7.21
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 18/26
MECANISMOS CAPÍTULO 7
171
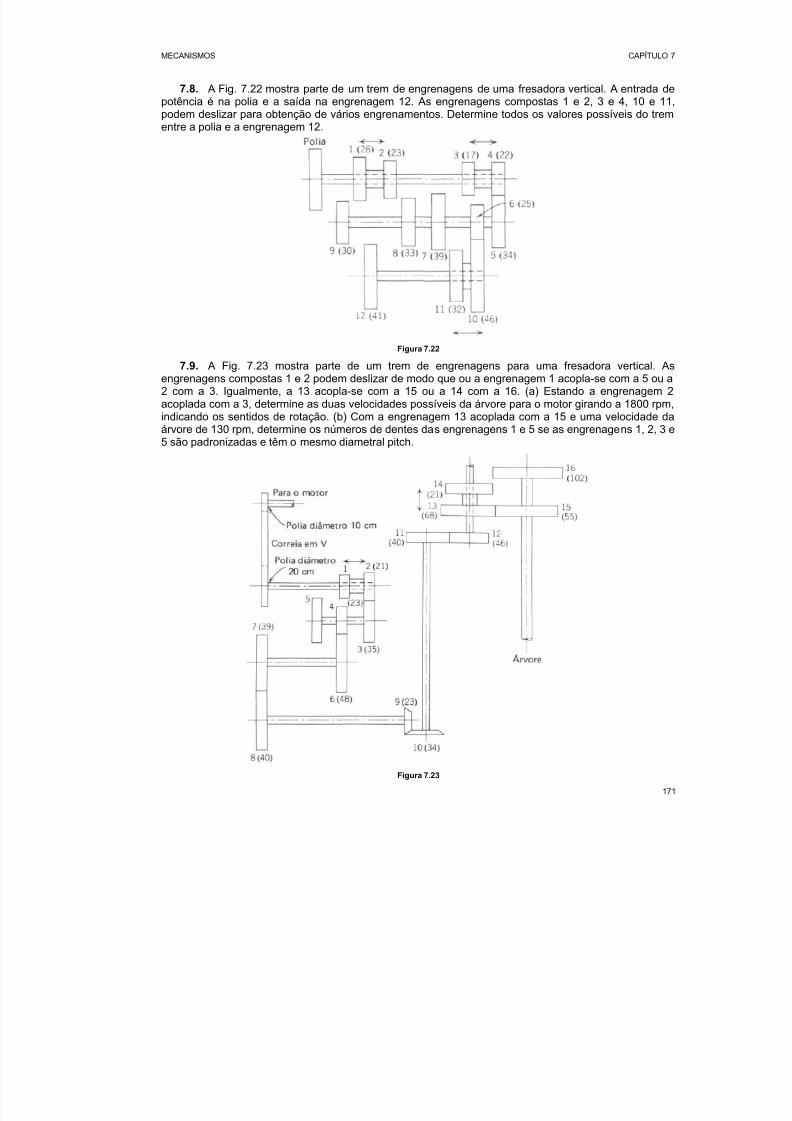
7.8. A Fig. 7.22 mostra parte de um trem de engrenagens de uma fresadora vertical. A entrada depotência é na polia e a saída na engrenagem 12. As engrenagens compostas 1 e 2, 3 e 4, 10 e 11,podem deslizar para obtenção de vários engrenamentos. Determine todos os valores possíveis do trementre a polia e a engrenagem 12.
Figura 7.22
7.9. A Fig. 7.23 mostra parte de um trem de engrenagens para uma fresadora vertical. Asengrenagens compostas 1 e 2 podem deslizar de modo que ou a engrenagem 1 acopla-se com a 5 ou a2 com a 3. Igualmente, a 13 acopla-se com a 15 ou a 14 com a 16. (a) Estando a engrenagem 2acoplada com a 3, determine as duas velocidades possíveis da árvore para o motor girando a 1800 rpm,indicando os sentidos de rotação. (b) Com a engrenagem 13 acoplada com a 15 e uma velocidade daárvore de 130 rpm, determine os números de dentes das engrenagens 1 e 5 se as engrenagens 1, 2, 3 e5 são padronizadas e têm o mesmo diametral pitch.
Figura 7.23
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 19/26
MECANISMOS CAPÍTULO 7
172
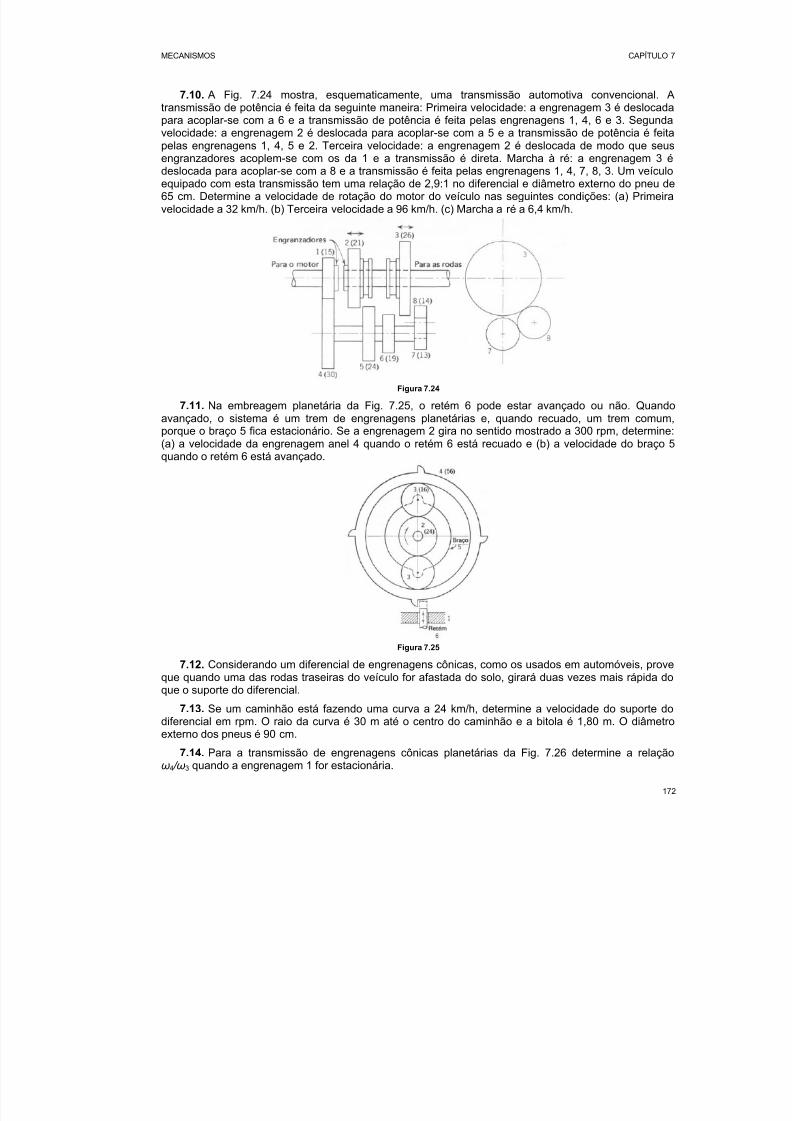
7.10. A Fig. 7.24 mostra, esquematicamente, uma transmissão automotiva convencional. Atransmissão de potência é feita da seguinte maneira: Primeira velocidade: a engrenagem 3 é deslocadapara acoplar-se com a 6 e a transmissão de potência é feita pelas engrenagens 1, 4, 6 e 3. Segundavelocidade: a engrenagem 2 é deslocada para acoplar-se com a 5 e a transmissão de potência é feitapelas engrenagens 1, 4, 5 e 2. Terceira velocidade: a engrenagem 2 é deslocada de modo que seusengranzadores acoplem-se com os da 1 e a transmissão é direta. Marcha à ré: a engrenagem 3 édeslocada para acoplar-se com a 8 e a transmissão é feita pelas engrenagens 1, 4, 7, 8, 3. Um veículoequipado com esta transmissão tem uma relação de 2,9:1 no diferencial e diâmetro externo do pneu de65 cm. Determine a velocidade de rotação do motor do veículo nas seguintes condições: (a) Primeiravelocidade a 32 km/h. (b) Terceira velocidade a 96 km/h. (c) Marcha a ré a 6,4 km/h.
Figura 7.24
7.11. Na embreagem planetária da Fig. 7.25, o retém 6 pode estar avançado ou não. Quandoavançado, o sistema é um trem de engrenagens planetárias e, quando recuado, um trem comum,porque o braço 5 fica estacionário. Se a engrenagem 2 gira no sentido mostrado a 300 rpm, determine:(a) a velocidade da engrenagem anel 4 quando o retém 6 está recuado e (b) a velocidade do braço 5
quando o retém 6 está avançado.
Figura 7.25
7.12. Considerando um diferencial de engrenagens cônicas, como os usados em automóveis, proveque quando uma das rodas traseiras do veículo for afastada do solo, girará duas vezes mais rápida doque o suporte do diferencial.
7.13. Se um caminhão está fazendo uma curva a 24 km/h, determine a velocidade do suporte dodiferencial em rpm. O raio da curva é 30 m até o centro do caminhão e a bitola é 1,80 m. O diâmetroexterno dos pneus é 90 cm.
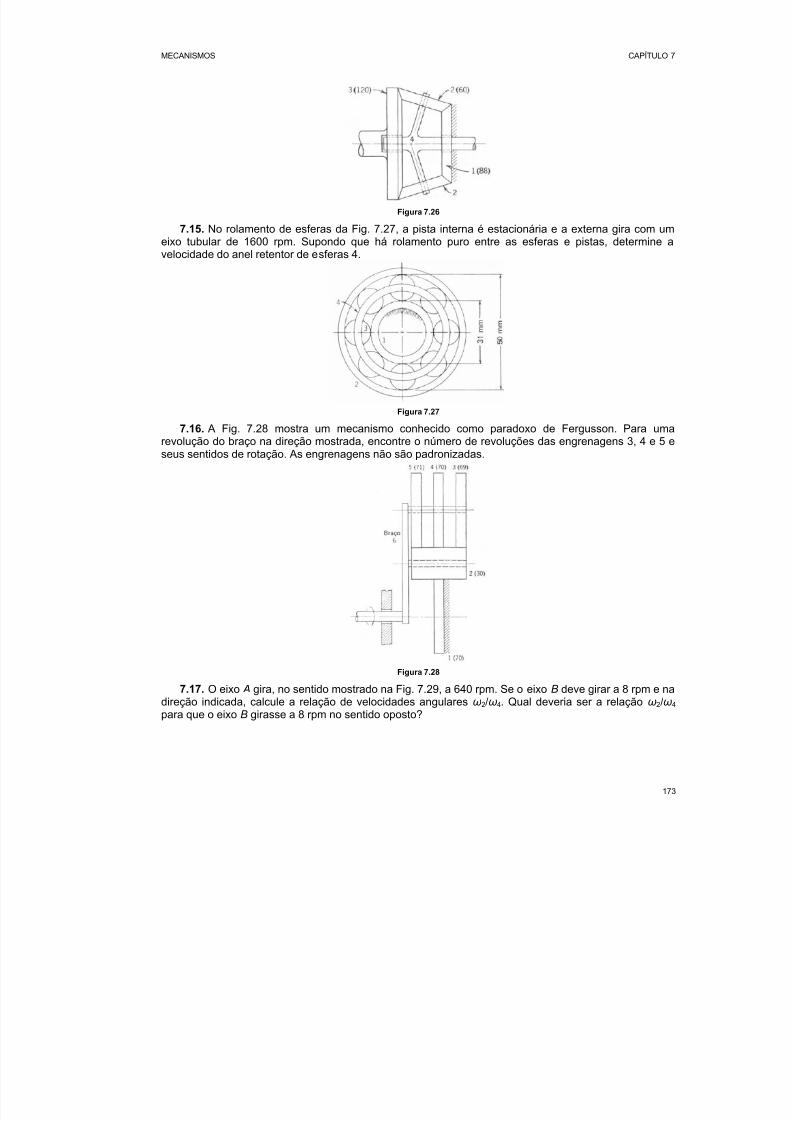
7.14. Para a transmissão de engrenagens cônicas planetárias da Fig. 7.26 determine a relação
ω4 / ω3 quando a engrenagem 1 for estacionária.
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 20/26
MECANISMOS CAPÍTULO 7
173
Figura 7.26
7.15. No rolamento de esferas da Fig. 7.27, a pista interna é estacionária e a externa gira com umeixo tubular de 1600 rpm. Supondo que há rolamento puro entre as esferas e pistas, determine avelocidade do anel retentor de esferas 4.
Figura 7.27
7.16. A Fig. 7.28 mostra um mecanismo conhecido como paradoxo de Fergusson. Para umarevolução do braço na direção mostrada, encontre o número de revoluções das engrenagens 3, 4 e 5 e
seus sentidos de rotação. As engrenagens não são padronizadas.
Figura 7.28
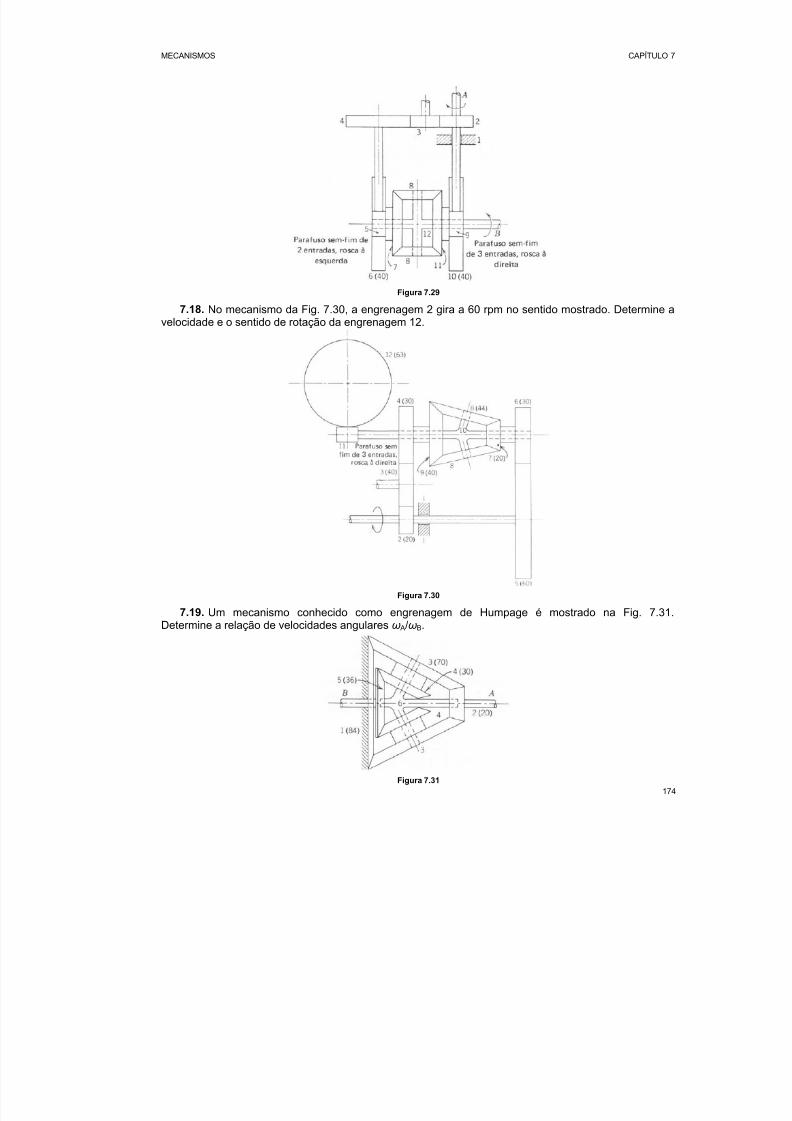
7.17. O eixo A gira, no sentido mostrado na Fig. 7.29, a 640 rpm. Se o eixo B deve girar a 8 rpm e nadireção indicada, calcule a relação de velocidades angulares ω2/ω4. Qual deveria ser a relação ω2/ω4 para que o eixo B girasse a 8 rpm no sentido oposto?
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 21/26
MECANISMOS CAPÍTULO 7
174
Figura 7.29
7.18. No mecanismo da Fig. 7.30, a engrenagem 2 gira a 60 rpm no sentido mostrado. Determine avelocidade e o sentido de rotação da engrenagem 12.
Figura 7.30
7.19. Um mecanismo conhecido como engrenagem de Humpage é mostrado na Fig. 7.31.Determine a relação de velocidades angulares ω A/ωB.
Figura 7.31
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 22/26
MECANISMOS CAPÍTULO 7
175
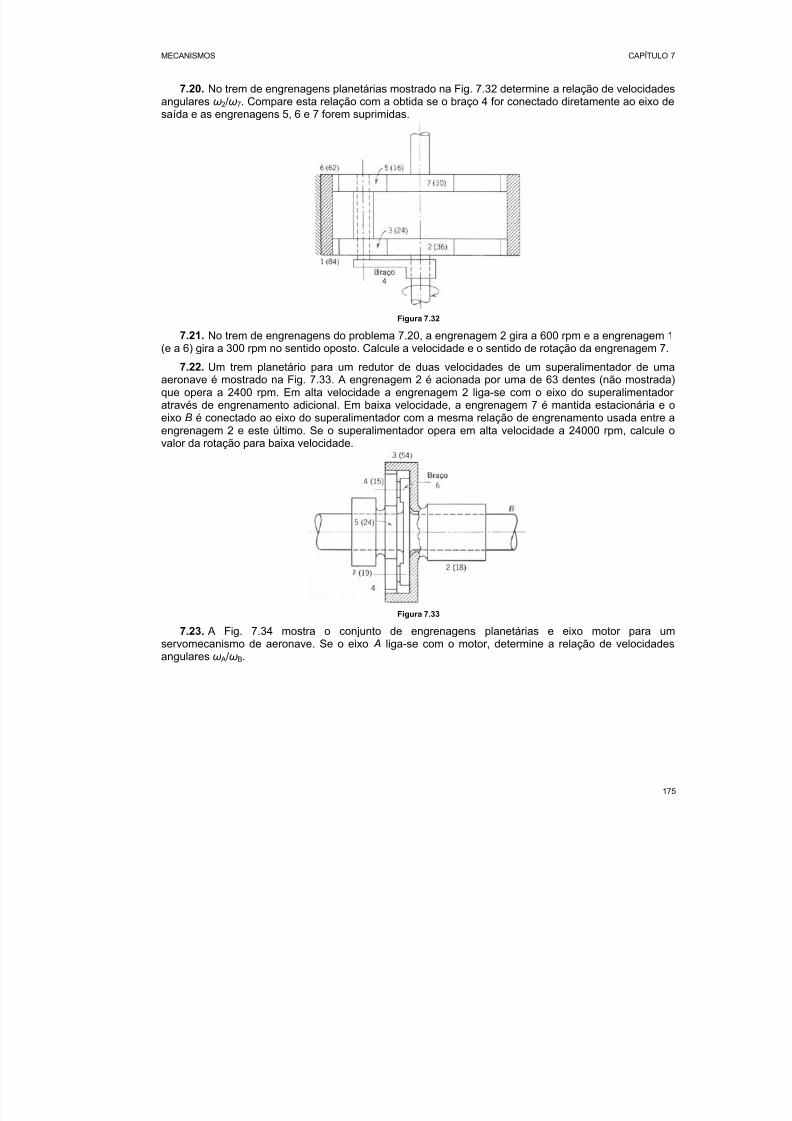
7.20. No trem de engrenagens planetárias mostrado na Fig. 7.32 determine a relação de velocidadesangulares ω2/ω7. Compare esta relação com a obtida se o braço 4 for conectado diretamente ao eixo desaída e as engrenagens 5, 6 e 7 forem suprimidas.
Figura 7.32
7.21. No trem de engrenagens do problema 7.20, a engrenagem 2 gira a 600 rpm e a engrenagem 1(e a 6) gira a 300 rpm no sentido oposto. Calcule a velocidade e o sentido de rotação da engrenagem 7.
7.22. Um trem planetário para um redutor de duas velocidades de um superalimentador de umaaeronave é mostrado na Fig. 7.33. A engrenagem 2 é acionada por uma de 63 dentes (não mostrada)que opera a 2400 rpm. Em alta velocidade a engrenagem 2 liga-se com o eixo do superalimentadoratravés de engrenamento adicional. Em baixa velocidade, a engrenagem 7 é mantida estacionária e oeixo B é conectado ao eixo do superalimentador com a mesma relação de engrenamento usada entre aengrenagem 2 e este último. Se o superalimentador opera em alta velocidade a 24000 rpm, calcule ovalor da rotação para baixa velocidade.
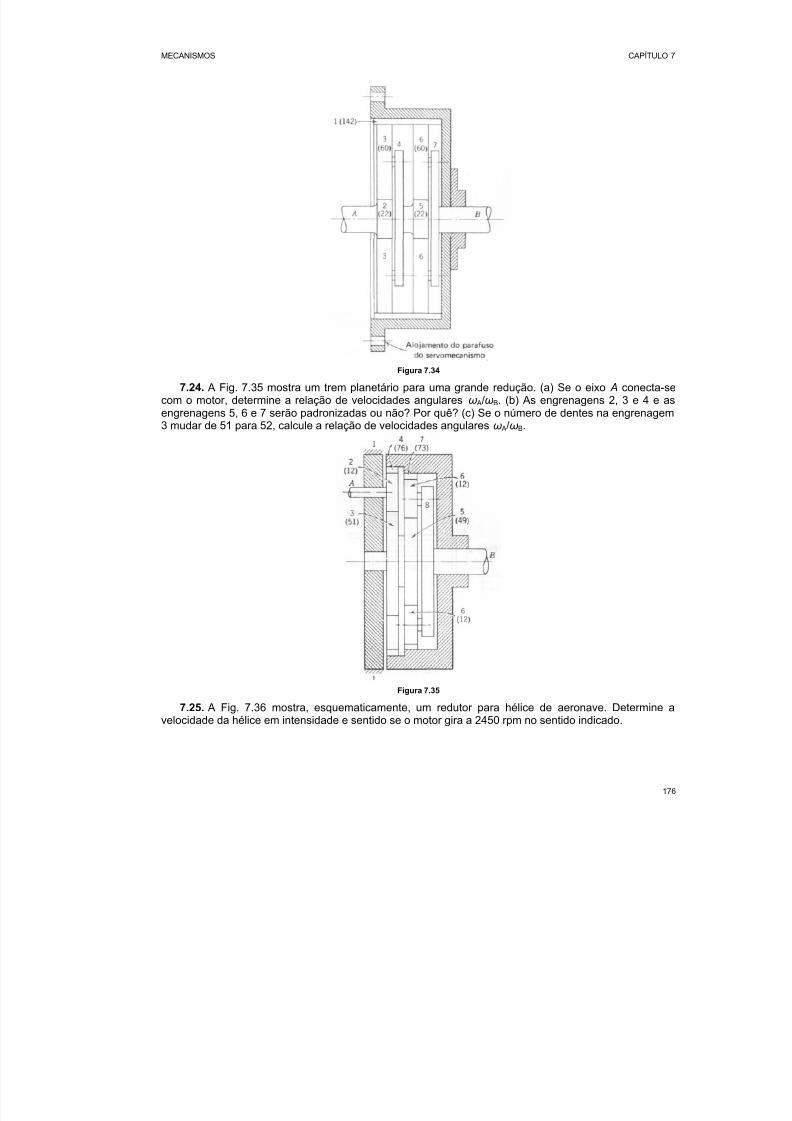
Figura 7.33 7.23. A Fig. 7.34 mostra o conjunto de engrenagens planetárias e eixo motor para um
servomecanismo de aeronave. Se o eixo A liga-se com o motor, determine a relação de velocidadesangulares ω A/ωB.
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 23/26
MECANISMOS CAPÍTULO 7
176
Figura 7.34
7.24. A Fig. 7.35 mostra um trem planetário para uma grande redução. (a) Se o eixo A conecta-secom o motor, determine a relação de velocidades angulares ω A/ωB. (b) As engrenagens 2, 3 e 4 e asengrenagens 5, 6 e 7 serão padronizadas ou não? Por quê? (c) Se o número de dentes na engrenagem3 mudar de 51 para 52, calcule a relação de velocidades angulares ω A/ωB.
Figura 7.35
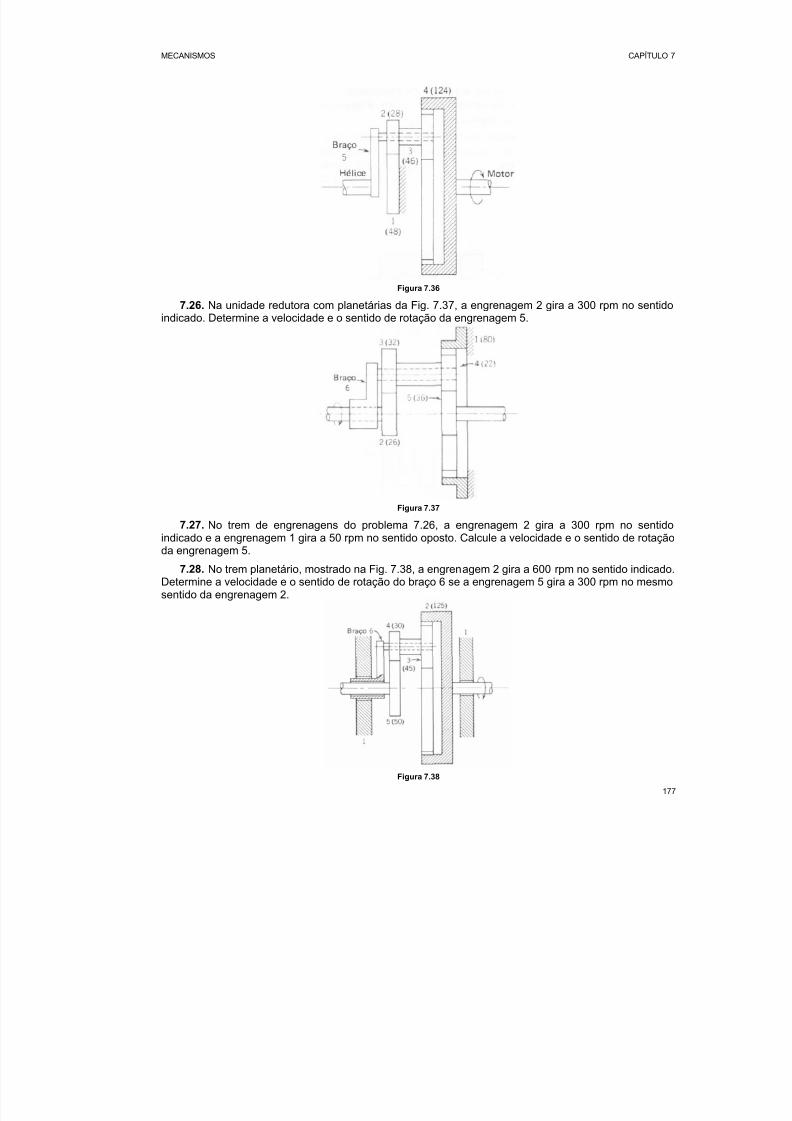
7.25. A Fig. 7.36 mostra, esquematicamente, um redutor para hélice de aeronave. Determine avelocidade da hélice em intensidade e sentido se o motor gira a 2450 rpm no sentido indicado.
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 24/26
MECANISMOS CAPÍTULO 7
177
Figura 7.36
7.26. Na unidade redutora com planetárias da Fig. 7.37, a engrenagem 2 gira a 300 rpm no sentidoindicado. Determine a velocidade e o sentido de rotação da engrenagem 5.
Figura 7.37
7.27. No trem de engrenagens do problema 7.26, a engrenagem 2 gira a 300 rpm no sentidoindicado e a engrenagem 1 gira a 50 rpm no sentido oposto. Calcule a velocidade e o sentido de rotaçãoda engrenagem 5.
7.28. No trem planetário, mostrado na Fig. 7.38, a engrenagem 2 gira a 600 rpm no sentido indicado.Determine a velocidade e o sentido de rotação do braço 6 se a engrenagem 5 gira a 300 rpm no mesmosentido da engrenagem 2.
Figura 7.38
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 25/26
MECANISMOS CAPÍTULO 7
178
7.29. Se no trem de engrenagens do problema 7.28, a engrenagem 2 girar a 1000 rpm no sentidomostrado e a 5 for mantida estacionária, o braço 6 girará a 600 rpm no mesmo sentido da engrenagem2. Determine a velocidade e o sentido de rotação que devem ser dados a engrenagem 5 para imobilizaro braço 6 se a engrenagem 2 continuar a girar a 100 rpm.
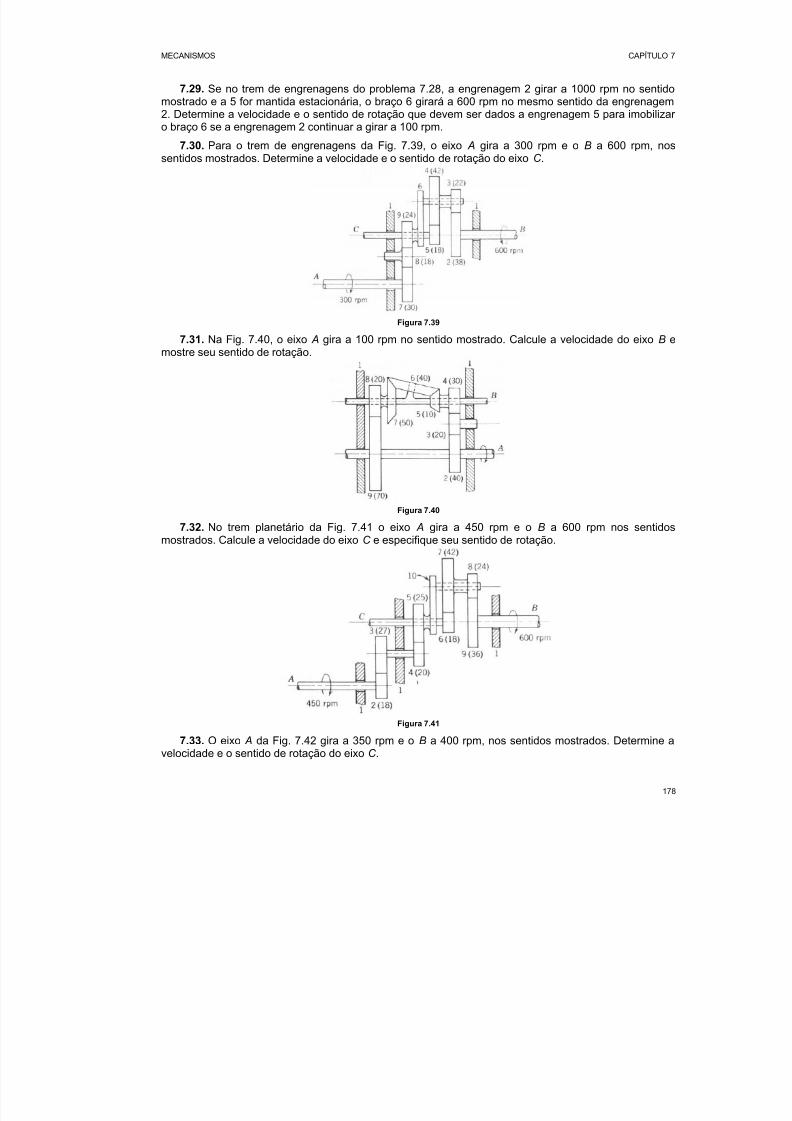
7.30. Para o trem de engrenagens da Fig. 7.39, o eixo A gira a 300 rpm e o B a 600 rpm, nossentidos mostrados. Determine a velocidade e o sentido de rotação do eixo C .
Figura 7.39
7.31. Na Fig. 7.40, o eixo A gira a 100 rpm no sentido mostrado. Calcule a velocidade do eixo B emostre seu sentido de rotação.
Figura 7.40
7.32. No trem planetário da Fig. 7.41 o eixo A gira a 450 rpm e o B a 600 rpm nos sentidosmostrados. Calcule a velocidade do eixo C e especifique seu sentido de rotação.
Figura 7.41
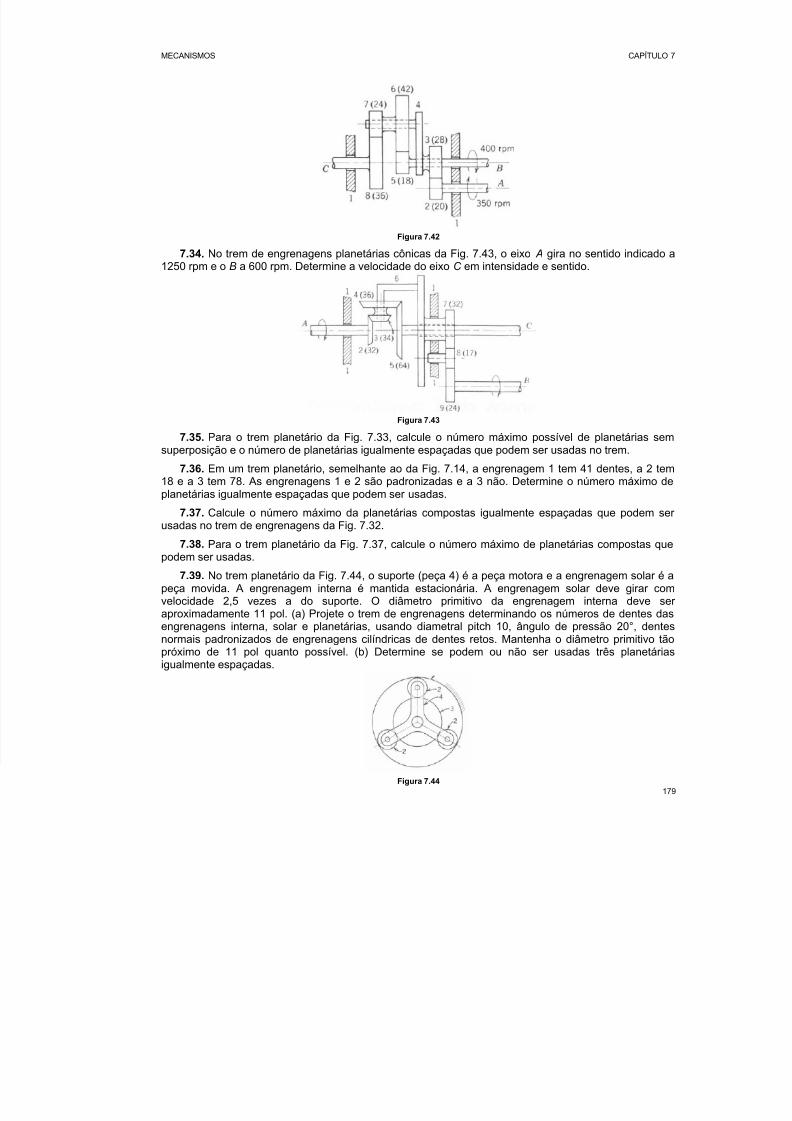
7.33. O eixo A da Fig. 7.42 gira a 350 rpm e o B a 400 rpm, nos sentidos mostrados. Determine avelocidade e o sentido de rotação do eixo C .
7/23/2019 Mecanismos_07 (1)
http://slidepdf.com/reader/full/mecanismos07-1 26/26
MECANISMOS CAPÍTULO 7
179
Figura 7.42
7.34. No trem de engrenagens planetárias cônicas da Fig. 7.43, o eixo A gira no sentido indicado a1250 rpm e o B a 600 rpm. Determine a velocidade do eixo C em intensidade e sentido.
Figura 7.43
7.35. Para o trem planetário da Fig. 7.33, calcule o número máximo possível de planetárias semsuperposição e o número de planetárias igualmente espaçadas que podem ser usadas no trem.
7.36. Em um trem planetário, semelhante ao da Fig. 7.14, a engrenagem 1 tem 41 dentes, a 2 tem18 e a 3 tem 78. As engrenagens 1 e 2 são padronizadas e a 3 não. Determine o número máximo deplanetárias igualmente espaçadas que podem ser usadas.
7.37. Calcule o número máximo da planetárias compostas igualmente espaçadas que podem serusadas no trem de engrenagens da Fig. 7.32.
7.38. Para o trem planetário da Fig. 7.37, calcule o número máximo de planetárias compostas quepodem ser usadas.
7.39. No trem planetário da Fig. 7.44, o suporte (peça 4) é a peça motora e a engrenagem solar é apeça movida. A engrenagem interna é mantida estacionária. A engrenagem solar deve girar comvelocidade 2,5 vezes a do suporte. O diâmetro primitivo da engrenagem interna deve ser
aproximadamente 11 pol. (a) Projete o trem de engrenagens determinando os números de dentes dasengrenagens interna, solar e planetárias, usando diametral pitch 10, ângulo de pressão 20°, dentesnormais padronizados de engrenagens cilíndricas de dentes retos. Mantenha o diâmetro primitivo tãopróximo de 11 pol quanto possível. (b) Determine se podem ou não ser usadas três planetáriasigualmente espaçadas.
Figura 7.44
![Artigo Nascimento e Mourão Mudanças no CGEnnascimentomourao.adv.br/artigos/artigo-mudancas-no-cgen.pdf · 1 1 1 1 1 ³¨ 1 1 1 1 1 1 1 ï 1 1 ¡ ð 1 1 1 1 1 Á Á Á X v ]](https://static.fdocumentos.com/doc/165x107/5f8dcbeda9ff3422f52eaf44/artigo-nascimento-e-mourfo-mudanfas-no-1-1-1-1-1-1-1-1-1-1-1-1-1-1.jpg)

![Lavidaesdura 1 1 1 1 [1]](https://static.fdocumentos.com/doc/165x107/559d4c061a28abf1018b46f6/lavidaesdura-1-1-1-1-1.jpg)


![[XLS] · Web view3038 1 3099 1 3112 1 3113 1 3116 1 3119 1 3120 1 3131 1 3153 1 3165 1 3193 1 3227 1 3253 1 3264 1 3275 1 3279 1 3297 1 3309 1 3319 1 3320 1 3322 1 3327 1 3445 1 3507](https://static.fdocumentos.com/doc/165x107/5c0c87ac09d3f213228c2e4c/xls-web-view3038-1-3099-1-3112-1-3113-1-3116-1-3119-1-3120-1-3131-1-3153-1.jpg)




![Sera Que Deus E Ocupado[1][1][1][1][1][1]....](https://static.fdocumentos.com/doc/165x107/559779191a28ab492d8b4649/sera-que-deus-e-ocupado111111.jpg)



![[XLS] · Web view1 3038 1 3099 1 3112 1 3113 1 3116 1 3119 1 3120 1 3131 1 3153 1 3165 1 3193 1 3227 1 3253 1 3264 1 3275 1 3279 1 3297 1 3309 1 3319 1 3320 1 3322 1 3327 1 3445 1](https://static.fdocumentos.com/doc/165x107/5c0cd66e09d3f217548ca60d/xls-web-view1-3038-1-3099-1-3112-1-3113-1-3116-1-3119-1-3120-1-3131-1-3153.jpg)


