Notas de Aula de Fotogrametria III Princípio dos sistemas ... · de modo a gerar uma onda de maior...
41
UNIVERSIDADE ESTADUAL PAULISTA "JÚLIO DE MESQUITA FILHO” Faculdade de Ciências e Tecnologia Notas de Aula de Fotogrametria III Princípio dos sistemas de varredura a LASER aerotransportado Autor: Prof. Mauricio Galo Departamento de Cartografia Presidente Prudente 2018 Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 1 Princípio de obtenção do LASER Light Amplification by Stimulated Emission of Radiation Em essência o LASER é um dispositivo eletro-óptico que gera radiação coerente baseada no princípio da emissão estimulada. Considerando duas ondas eletromagnéticas, elas podem ser adicionadas, de modo a gerar uma onda de maior amplitude ou serem subtraídas, gerando uma de menor amplitude. No primeiro caso tem-se uma interferência construtiva e no segundo uma destrutiva. Este comportamento depende da fase relativa e duas ondas podem ser ditas coerentes se esta fase relativa for constante. Para outros conceitos de coerência sugere-se, por exemplo, Redding et al (2011).
Transcript of Notas de Aula de Fotogrametria III Princípio dos sistemas ... · de modo a gerar uma onda de maior...

UNIVERSIDADE ESTADUAL PAULISTA "JÚLIO DE MESQUITA FILHO” Faculdade de Ciências e Tecnologia
Notas de Aula de Fotogrametria III Princípio dos sistemas de varredura a LASER
aerotransportado
Autor: Prof. Mauricio Galo Departamento de Cartografia
Presidente Prudente 2018
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 1
Princípio de obtenção do LASER
Light Amplification by Stimulated Emission of Radiation
Em essência o LASER é um dispositivo eletro-óptico que gera radiação coerente baseada no princípio da emissão estimulada.
Considerando duas ondas eletromagnéticas, elas podem ser adicionadas, de modo a gerar uma onda de maior amplitude ou serem subtraídas, gerando uma de menor amplitude. No primeiro caso tem-se uma interferência construtiva e no segundo uma destrutiva. Este comportamento depende da fase relativa e duas ondas podem ser ditas coerentes se esta fase relativa for constante.
Para outros conceitos de coerência sugere-se, por exemplo, Redding et al (2011).

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 2
Emissão estimulada da radiação
É o processo pelo qual um fóton incidente em um sistema interage com
este sistema produzindo dois fótons. Este efeito ocorre quando se tem um átomo ou um íon num estado energético E2 e após a incidência de um fóton, mais um fóton emerge do sistema, fazendo com que o átomo ou íon inicial mude para um estado de menor energia (E1). A repetição deste processo permite a geração de mais fótons, que pode gerar um processo em cadeia nos quais os fótons emitidos possuem algumas características em comum:
- mesma energia do fóton incidente; - mesma fase; - mesma direção e - mesma polarização.
Este princípio é ilustrado na próxima figura.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 3
Depois
Fóton
E1
E2 Estado excitado
Estado fundamental
Antes
Princípio da emissão estimulada onde E2 corresponde a um estado de maior energia (excited level) e E1 ao estado fundamental (ground level).
Baseado em Lohani (2008)

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 4
Utilização do LASER em Fotogrametria
Geração de uma nuvem densa de pontos com coordenadas conhecidas. Pode ser usado tanto em aplicações terrestres quanto aéreas e orbitais. Independente da plataforma de aquisição utilizada a maior contribuição é na geração de uma nuvem densa de pontos que permite a modelagem 3D das superfícies.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 5
Princípio da determinação da posição 3D
Independente da fonte de emissão da energia, o princípio da determinação da posição 3D a partir de um sistema de varredura LASER aerotransportado é comum a outros sistemas, como os sistemas de varredura a LASER terrestre, os sistemas a LASER orbitais e as estações totais. As figuras abaixo mostram dois sistemas cartesianos, um considerando um sistema terrestre e outro aéreo.
(a) (b) Sistemas de referência cartesiano 3D: caso terrestre (a) e aéreo (b).

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 6
Princípio da determinação da posição 3D
Considerando a geometria mostrada na figura abaixo e que valores de (d, α, β) sejam medidos (pode ser por diferentes técnicas), as coordenadas 3D do ponto Pi podem ser determinadas, conforme segue:
Coordenadas da origem, obtidas por técnicas geodésicas ou topográficas: (Xo,Yo,Zo) Valores determinados para o ponto Pi: (d, α, β)
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 7
Princípio da determinação da posição 3D
Dependendo da técnica utilizada pode-se considerar que os valores de (d, α, β’) sejam medidos, onde β’ corresponde ao ângulo zenital, sendo β = π/2 - β’.

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 8
Terminologia
ALS (Airborne LASER Scanning) SVLA (Sistema de Varredura a LASER Aerotransportado) LiDAR (Light Detection And Ranging) Perfilamento a LASER Varredura a LASER TLS (Terrestrial Laser Scanning) ALB (Airborne Laser Bathymetry) <<< Para o caso de aplicações
batimétricas
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 9
Componentes de um SVLA
Em geral os Sistemas de Varredura a LASER Aerotransportados são compostos por quatro componentes:
A unidade LASER, responsável pela geração, emissão e recepção dos pulsos LASER.
A unidade de medida inercial (IMU – Inertial Measurement Unit), responsável pela aquisição, em tempo real, de dados que permitem estimar a atitude da plataforma.
Receptor GNSS e respectivos componentes, que permitem estimar a posição da plataforma em tempo real.
Uma unidade de controle (computador), que permite o controle, monitoramento e gravação dos dados adquiridos pelo sistema.
Para detalhes adicionais sobre os componentes de um SVLA sugere-se: Wehr e Lohr (1999) e Shan e Toth (2008).

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 10
Componentes de um SVLA
Na figura abaixo é mostrada a configuração típica de um SVLA, de acordo
com Wehr e Lohr (1999).
Elementos básicos de um SVLA.
Fonte: Wehr e Lohr (1999).
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 11
Exemplos de alguns sistemas a LASER aerotransportados
Optech
Frequência varredura: 70 Hz (Max.) Freq. do pulso LASER: 33 – 100 kHz Ac. horizontal: Altitude*1/5500 Ac. Vertical: < 20 cm Número de pulsos cap.: até 4

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 12
Sistemas a LASER Aerotransportados (exemplos)
Toposys - modelo Harrier 24, usado no DSS 322 - Applanix
Frequência varredura: 80 Hz (Max.) Freq. do pulso LASER: 10 kHz Ac. horizontal: < 0,25 m Ac. Vertical: < 0,15 m Número de pulsos cap.: 1º ou último
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 13
Sistemas a LASER Aerotransportados (exemplos)
Leica ALS50-II
Frequência varredura: 90 Hz (Max.) Freq. do pulso LASER: 150 kHz (Max.) Divergência do feixe: ≤ 0,22 mrad Número de pulsos cap.: 4 (1º, 2º, 3º e último) Altura de voo (AGL): 200 m a 6000 m

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 14
Sistemas a LASER Aerotransportados (exemplos)
RIEGL LSM-Q680i
Frequência varredura: até 266 kHz Freq. do pulso LASER: até 400 kHz Divergência do feixe: ≤ 0,5 mrad Acurácia: 20 mm Precisão: 20 mm Máx.altura de vôo (AGL*): 1600 m (80kHz) a 800 m (400KHz) λ: Infravermelho próximo (NIR)
*AGL – Above Ground Level
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 15
Sistemas a LASER Aerotransportados (exemplos)
Trimble AX80
Frequência varredura: até 400 Hz Freq. de rep. do pulso LASER: 200 kHz - 800 kHz Divergência do feixe: ≤ 0,25 mrad Acurácia vertical: < 15 cm Acurácia horizontal: < 20 cm Altura de vôo (AGL): 50 m a 4700 m λ: Infravermelho próximo (NIR)

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 16
Sistemas a LASER Aerotransportados (exemplos)
RIEGL VQ-880-G
Sistema RIEGL VQ-880-G instalado em uma plataforma giroestabilizada GSM-3000.
Fonte: www.riegl.com
Exemplo de um sistema ALS (Airborne Laser Scanning) destinado a levantamento tanto topográfico quanto batimétrico (ALB – Airborne Laser Bathymetry) Frequência varredura: até 160 scans/sec Freq. de rep. do pulso LASER: até 550 kHz Ângulo de visada: 40o Divergência do feixe: de 0,7 até 2,0 mrad Acurácia na medida da distância: 25 mm Número de retornos: até 9 λ Aplicações padrão (em terra): 1064 nm (NIR) λ Para ALB: 532 nm (Verde) Profundidade (modo ALB): 1,5 x a profundidade do disco de Secchi Câmara RGB: 29 Mpixel
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 17
Sistemas a LASER Aerotransportados (exemplos)
RIEGL VQ-880-G (continuação)
Sistema RIEGL VQ-880-G.
Fonte: www.riegl.com
A unidade LASER padrão (NI) e a usada em levantamento batimétrico (ALB) podem operar simultaneamente. A unidade LASER padrão faz varredura linear e a ALB realiza varredura circular.

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 18
Sistemas a LASER Aerotransportados (exemplos)
SHOALS – 1000T - Optech
Fonte: http://www.teledyneoptech.com/
Sistema que pode operar nos modos hidrográfico e topográfico (opcional) Modo hidrográfico Profundidade: 50 m (máxima) Frequência de medição: 1000 Hz Altura operação: 200 – 400 m Modo Topográfico Frequência medição: 10 kHz Altura operação: 300 – 700 m
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 19
Sistemas a LASER Aerotransportados (exemplos)
Optech CZMIL* Nova
Fonte: http://www.teledyneoptech.com/
Sistema que combina sensor LIDAR para aplicações em batimetria, sensor hiperespectral e câmara RGB. Altura de operação: 400 m – 1000 m Modo hidrográfico(LiDAR Hydrographic Mode) Frequência de medição: 70 kHz Varredura: 20º, circular Modo Topográfico (LiDAR Topographic Mode) Frequência de medição: 80 kHz Acurácia horizontal: ±1 m (2σ) Acurácia vertical: ±15 cm (2σ)
* CZMIL – Coastal Zone Mapping and Imaging Lidar

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 20
Sistemas a LASER Aerotransportados
Outros sistemas:
Optech Titan
Leica HawkEye-III ...
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 21
Disco de Secchi
Em alguns sistemas usados em batimetria, os fabricantes explicitam a
profundidade máxima em função da profundidade obtida pelo Disco de Secchi. Disco de Secchi – Disco nas cores branca/preto (figura abaixo) usado para
medir a profundidade na qual o disco não pode ser visto a olho nu. Esta profundidade tem relação com a transparência e o nível de turbidez de corpos d’água.
Fonte: www.consulpesq.com.br Fonte: http://www.d2l.com.br/emissarios-submarinos/

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 22
Princípio do Sistema a LASER Aerotransportado
Geração de pulsos LASER - Os pulsos são gerados numa dada frequência – Frequência de geração dos pulsos; Emissão dos pulsos – Os pulsos gerados são enviados (na Frequência gerada) com o auxílio de um sistema de varredura (que opera em uma determinada Frequência de varredura); Reflexão dos pulsos - Parte da energia é refletida pelos alvos e retorna ao sistema; Cálculo da distância entre o sensor e o objeto: É função da velocidade de propagação (c) e o tempo emissão-retorno (t) dividido por 2, ou seja: d=c*t/2.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 23
Princípio da varredura por LASER aerotransportado. Baseado em Lohani (2008)

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 24
Tipos de Espelhos e de Varredura a LASER
Espelho Polígono de Espelho de Varredura Oscilante Rotação Palmer
Adaptado de Lohani (2008) e Dalmolin e Santos (2004).
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 25
Tipos de pontos obtidos pelo sensor de varredura a LASER.
Adaptado de Brandalize (2004)

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 26
Exemplo de um sistema de varredura aerotransportado e seus componentes. Fonte: RIEGL Laser Measurement Systems GmbH, 2011 (www.riegl.com).
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 27
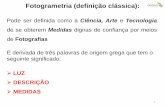
Comportamento do eco do pulso LASER para diferentes superfícies
Em (1) o pulso atinge alguns galhos da árvore, antes de atingir o solo. Por esta razão observa-se 4 ecos, um para cada um dos galhos e o último do solo. Em (2) observa-se o retorno de um eco que incide em uma superfície com um ângulo de incidência menor que 90º, gerando um eco mais extenso. Em (3) observa-se um eco similar ao pulso LASER emitido, após reflexão em uma superfície plana e incidência perpendicular.
Fonte: RIEGL Laser Measurement Systems GmbH 2011 (www.riegl.com).

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 28
1) Todos os componentes eletrônicos que compõem a unidade de emissão/recepção são programados de modo a otimizar a varredura, conforme planejado;
2) Feixe de raios LASER;
3) Polígono rotativo, que permite a varredura unidirecional;
4) A cada medida de distância, o ângulo de varredura, a amplitude e informação de tempo são transmitidas via protocolo TCD/IP;
5) Análise do sinal de retorno do LASER (waveform analysis);
6) Unidade de armazenamento de dados digitais (digital data record);
7) Cabo de conexão serial de alta velocidade.
Fonte: RIEGL Laser Measurement Systems GmbH 2011 (www.riegl.com).
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 29
Dados disponibilizados por um sistema LASER
Arquivos com o primeiro pulso, arquivos com o último pulso. Alguns sistemas permitem armazenar o 1º, 2º, 3º, ...até o último pulso.
Arquivos gerados pelo sensor Optech LiDAR ALTM 2050, primeiro e último
pulso.
Exemplo de dados obtidos pelo sensor Optech LiDAR ALTM 2050, de propriedade do LATEC (Instituto de Tecnologia para o Desenvolvimento) no entorno do Centro Politênico da UFPR – Universidade Federal do Paraná, Curitiba - PR, em 09/05/2003.

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 30
Tamanho do arquivo: 85.505 kB.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 31
Tamanho do arquivo com os últimos pulsos: 264.846 kB.

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 32
Exemplo de parte da imagem hipsométrica obtido pelo sistema do LACTEC,
usando o sensor Optech LiDAR ALTM 2050.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 33
Nuvem de pontos correspondente a uma edificação “extraída” dos dados
do sistema LASER do LACTEC*
*Optech LiDAR ALTM 2050.

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 34
Detalhe da nuvem de pontos onde é possível ver com mais detalhes as
linhas de varredura, bem como a área de sobreposição entre faixas adjacentes
Arquivos de dados: LACTEC, sensor Optech LiDAR ALTM 2050.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 35
Formatos de arquivos frequentemente utilizados: ASCII e LAS
Os arquivos ASCII, embora possam ser abertos e editados por diversos aplicativos, não é a opção mais utilizada para armazenar dados obtidos por LASER aerotransportados, sendo muito comum o uso do formato LAS. LAS (Log ASCII Standard) é um formato de arquivo binário, que permite o intercâmbio de dados LiDAR. Comparados com os arquivos ASCII, os arquivos binários LAS são menores. Além do formato LAS tem-se também o formato compactado (sem perda) LAZ. Mais detalhes sobre estes formatos podem ser vistos em http://www.asprs.org/a/society/committees/lidar e Samberg (2007).

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 36
Dados relativos à qualidade dos dados obtidos a partir do sistema
LASER - Optech LiDAR ALTM 2050
Precisão Horizontal 1/2000 x Altitude*
Precisão Vertical 1200 m de altitude 2000 m de altitude 3000 m de altitude
15 cm 25 cm 35 cm
Fonte: Calmon et al. (2003).
* Foi mantido o termo usado na referência. A rigor deve-se usar a altura de voo sobre o terreno.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 37
Exemplo de um conjunto de dados obtidos por um sistema de
varredura a LASER - RIEGL LSM-Q680i
Dados LiDAR adquiridos empresa pela Engemap / SensorMap em 2011.

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 38
Conceitos de DSM, DTM e DSMn De acordo Miller & La Flame (1958) apud El-Sheimy (1999)1 o conceito de Modelo Digital de Terreno - DTM é dado por:
"The DTM is simply a statistical representation of the continuous surface of the ground by a large number of selected points with know X, Y, Z co-ordinates in an arbitrary co-ordinate field".
Fonte: (Miller & La Flame, 1958)
Este é o conceito original apresentado em 1958. Como já visto anteriormente, vários outros conceitos de modelos de superfície podem ser utilizados, sendo revisto na sequência os conceitos de DSM e DTM comumente utilizados:
DSM – Modelo Digital de Superfície: Conjunto de pontos de elevação, que representam uma porção da superfície terrestre, incluindo as feições como árvores e as antrópicas, como edificações, rodovias, etc. DTM – Modelo Digital de Terreno: Se refere a representação da superfície física, sem as feições antrópicas (edificações, rodovias, etc), árvores, etc. É relevante lembrar que a geração de curvas de nível deve ser feita sobre o DTM, e não sobre o DSM.
1 MILLER, C; La FLAME, R. A. The Digital Terrain Modelling Theory and Applications. Photogrammetric Engineering, 24 (3). p. 433-442. 1958.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 39
Conceitos de DSM, DTM e DSMn (cont.) Além dos conceitos apresentados, um outro conceito também utilizado é o de DSMn – Modelo Digital de Superfície Normalizado. Este modelo de superfície procura destacar as feições que estão acima do terreno (ou do DTM). Considerando hDSM e hDTM as altitudes de um determinado ponto sobre o DSM e DTM, respectivamente, a altitude deste mesmo ponto no DSMn pode ser obtida pela seguinte operação:
DTMDSMDSMn hhh . Deste modo, pode-se observar que nesta representação os pontos do DSM que estiverem sobre o solo terão coordenadas nulas no DSMn. A próxima figura procura ilustrar estas três superfícies (DSM, DTM e DSMn).

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 40
hDSMn = hDSM - hDTM
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 41
Perfil do terreno e a superfície de referência.
DSM – Modelo Digital de Superfície.
DTM – Modelo Digital do Terreno
DSMn – Modelo Digital de Superfície Normalizado

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 42
Exemplo de DSM, DTM e DSMn
Criado usando o software LAStools.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 43
Exemplo de DSM, DTM e DSMn
Criado usando o software LAStools.

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 44
Exemplo de DSM, DTM e DSMn
Criado usando o software LAStools.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 45
Alguns elementos relacionados à geometria de aquisição
Na sequência são apresentados alguns elementos associados à geometria e à aquisição de dados LiDAR aerotransportados. Dentre as variáveis envolvidas pode-se mencionar:
γ - Ângulo de divergência do pulso LASER. Normalmente utiliza-se a unidade mrad (miliradianos);
H - Altura de voo. Alguns fabricantes utilizam em suas especificações a sigla AGL (Above Ground Level);
D - Diâmetro do “ponto” projetado (footprint);
θ - Ângulo de abertura máximo. Também é usual FOV (Field Of View), como em Sensoriamento Remoto orbital;
Sw - Largura da faixa de varredura no terreno;
NLIN - Número de pontos por linha de varredura;

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 46
Alguns elementos relacionados à geometria de aquisição (cont.)
F - Frequência de operação do sistema, frequência de repetição dos pulsos ou taxa de repetição dos pulsos. Unidade: normalmente utiliza-se kHz;
fSC - Frequência de varredura (número de linhas escaneadas por segundo). Unidade: normalmente utiliza-se Hz ou kHz.
V - Velocidade da aeronave;
dL Voo - Distância entre os pontos amostrados (ao longo da linha de voo);
dT - Distância entre os pontos amostrados (transversais às linhas de voo).
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 47
Diâmetro do ponto projetado - footprint
Footprint
Ângulo de divergência do pulso (γ)
Diâmetro do “ponto” projetado D
Altura de voo (H)
Footprint
Emissor LASER

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 48
Ângulo de divergência do pulso (γ)
Diâmetro do “ponto” projetado D
Altura de voo (H)
Footprint
Emissor LASER
d (abertura)
γ/2
Cálculo do diâmetro D:
2/tg.H.2DH2
D2/tg
ou
2/tg.H.2dD Como o ângulo de divergência é pequeno pode-se escrever:
.HD sendo γ em radianos.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 49
Superfície
Abertura (θ)
Altura de voo (H)
Datum Sw - Largura da faixa de varredura (swath width)
Cálculo de Sw:
2/tg.H.2S
H2
S2/tg
w
w
c

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 50
Número de pontos por linha de varredura
F - Frequência de operação do sistema, frequência de repetição dos pulsos ou
taxa de repetição dos pulsos. Unidade: normalmente utiliza-se kHz ou pulsos por segundo.
fSC - Frequência de varredura (número de linhas escaneadas por segundo). Unidade: normalmente utiliza-se Hz ou kHz.
linha
pulsos
s/linhas
s/pulsos:Unidade
f
FN
SC
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 51
Distância entre os pontos após varredura
Transversal à linha de voo (dT)
Esta distância depende do valor de Sw e do número de pontos determinados por linha de varredura (N).
N
Sd w
T
Ao longo da linha de voo (dL Voo)
Esta distância é função da velocidade da aeronave e da frequência de varredura.
SCLVoo f
vt.vd
rr

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 52
Efeito da abertura do feixe ao atingir bordas
Em função do ângulo de divergência (γ) do feixe LASER, quando o feixe LASER atinge uma borda, uma parte do feixe continua a se propagar e a parte incidente na borda retorna um eco. Em função disso pode-se perceber que em bordas pode-se ter múltiplos retornos. Superfície
Ângulo de divergência do pulso (γ)
Diâmetro do “ponto” projetado
D
Altura de voo (H)
Datum
Footprint
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 53
Referenciais e Modelo Matemático que relacionam a distância obtida pela unidade LASER e as coordenadas no referencial do espaço objeto
Como visto nas seções anteriores, o sensor de imageamento (câmara), o receptor GNSS e a unidade de medida inercial (IMU) são usados em conjunto durante a missão de aquisição das imagens, seja a bordo de plataformas aerotransportadas ou terrestres (em veículos, por exemplo).
Embora tenha sido mencionado a câmara de quadro como exemplo de sensor, a mesma ideia e os mesmos modelos (com algumas adaptações) podem ser utilizados para o caso de utilização de outros sensores: sensor de imageamento linear de varredura, sistema de varredura a LASER, dentre outros. Na sequência serão vistos os referenciais, bem como o modelo matemático que permite a obtenção da posição de um ponto no sistema de referência do espaço objeto, obtido por um SVLA.

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 54
Descrição de algumas variáveis (apenas os vetores).
Variável Descrição
mirr
Vetor posição de um ponto i no referencial do espaço objeto (ou referencial associado ao mapeamento). Este vetor é obtido a partir da integração GNSS/INS, levando em consideração o vetor lever arm entre a origem do sistema de coordenadas da IMU e o centro de fase da antena GNSS.
)t(r mb
r
Vetor posição da origem do sistema de coordenadas da IMU com relação a origem do referencial associado ao mapeamento.
bULrr
Vetor posição da origem da unidade LASER – UL e a origem do sistema de coordenadas da IMU. Este vetor (lever arm) é determinado na calibração do sistema.
)t(r PLi
r
Vetor posição do ponto i, com relação ao ponto de emissão do LASER, no instante t no referencial PL (associado ao pulso LASER). A
grandeza )t( é a distância obtida pelo SVLA no instante t.
tPLi )t(00)t(r r
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 55
Descrição de algumas matrizes de rotação.
Variável Descrição
)t(Rmb
Representa a matriz de rotação entre o referencial de mapeamento e o sistema de coordenadas associado a IMU. Esta matriz é obtida pela integração GNSS/INS.
Em Habib et al. (2010) esta matriz é designada por roll,pitch,yawR .
bULR
Representa a matriz de rotação entre o sistema de coordenadas associado a IMU e o sistema de coordenadas da unidade laser (UL). Esta matriz é também denominada matriz de boresight é representada
por Δκ,ΔΔω,R em Habib et al. (2010).
)t(R ULPL
Representa a matriz de rotação entre a unidade LASER e o pulso LASER.
Em Habib et al. (2010) esta matriz é designada por βα,R .
A próxima figura mostra os referenciais e as matrizes, conforme a
descrição anterior.

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 56
Referenciais envolvidos na determinação de posição por um Sistema de Varredura a LASER Aerotransportado. Adaptado de: El-Sheimy, Valeo e Habib (2005) e Habib, Bang, Kersting e Chow (2010).
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 57
Se todos os referenciais que aparecem na figura fossem paralelos entre sí, as coordenadas do ponto Pi no referencial de mapeamento poderiam ser obtidas por:
)t(rr)t(r)t(r PLi
bUL
mb
mi
rrrrr .
A equação acima corresponde a uma situação que não ocorre na prática,
uma vez que os sistemas não são paralelos entre si. Deste modo, assumindo que num determinado instante t a distância obtida pelo SVLA seja ρ(t) pode-se
escrever o vetor )t(r PLi
r por:
)t(ρ
0
0
)t(ρ00)t(r tPLi
r
.

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 58
Deste modo, considerando todos os referenciais envolvidos o vetor )t(r mi
r
pode ser obtido por:
PLi
ULPL
bUL
mb
bUL
mb
mb
mi r).t(R.R).t(Rr).t(R)t(r)t(r
rrrr ,
ou
)t(
0
0
).t(R.R).t(Rr).t(R)t(r)t(r ULPL
bUL
mb
bUL
mb
mb
mi
ρ
rrr
.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 59
A equação anterior pode ser escrita de outras formas, dependendo de quais informações são disponíveis. Na sequência é mostrada a equação como apresentada por Habib et al (2010):
)t(ρ
0
0
).t(R).t(R).t(Rr).t(R)t(r)t(r βα,Δκ,ΔΔω,roll,pitch,yawb
ULroll,pitch,yawm
bm
i
rrr
.
A matriz βα,R pode ser obtida a partir dos ângulos α e β, que correspondem aos ângulos de rotação em torno do eixo zUL e yUL, respectivamente. Assim, pode-se escrever:
)β(R).α(R)t(R YZβα, .

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 60
Estimativa do erro posicional (planimétrico)
O modelo matemático apresentado anteriormente permite determinar a posição de um ponto a partir de um SVLA. A qualidade da posição obtida depende de diferentes fatores, dentre os quais pode-se citar: qualidade da medida da distância, do tempo medido, dos ângulos determinados pela IMU e da qualidade da posição estimada pelo GNSS. Com base em ASPRS (2014), o erro planimétrico de um ponto obtido por um SVLA pode ser estimado por:
, em que: - RMSELidar – RMSE planimétrico para um ponto obtido pelo sistema LiDAR; - RMSEGNSS – RMSE planimétrico para a posição obtida por GNSS; - RMSEIMU – RMSE para a medida angular obtida por uma IMU; - hAGL – Altitude média de voo, sobre o terreno.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 61
Estimativa do erro posicional (planimétrico) (Cont.)
Na equação anterior o termo permite converter o RMSE angular da IMU, projetado para o terreno e estimado para uma das componentes, para uma direção resultante. Para detalhes adicionais relativo à constante 1,25 sugere-se consultar ASPRS (2015). Exemplo:
Assumindo que um determinado ponto foi determinado por um SVLA na qual o RMSEx,y, em uma das componentes obtida pelo GNSS seja 0,080 m; que a IMU utilizada possua RMSEIMU da ordem de 10” e que a altitude de voo sobre o terreno seja 1000 m, qual o RMSE planimétrico esperado para este ponto?
Como foi dado o valor de RMSEx,y por componente, e não para a resultante planimétrica, pode-se obter RMSEGNSS por RMSEGNSS = RMSEx,y. Deste modo, aplicando os valores acima na equação dada obtêm-se:
RMSELidar ≈ 14,2 cm

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 62
Exemplos de pontos de controle utilizados em levantamentos LiDAR
Na figura abaixo é mostrada a imagem de um alvo usado em aplicações LiDAR bem como este tipo de alvo aparece na nuvem de pontos.
(a) (b) Em (a) pode ser visto um ponto de controle LiDAR e em (b) como este tipo de ponto aparece na nuvem de pontos. Fonte: Habib (2008).
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 63
Sistemas LiDAR aerotransportados em aplicações batimétricas
Os sistemas de varredura a LASER aerotransportados normalmente
operam na região do infravermelho próximo (NIR) do espectro eletromagnético.
Fonte: Ashraf et al (2011).

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 64
Sistemas LiDAR aerotransportados em aplicações batimétricas
Em função da absorção do NIR pela na água, os sistema ALS não são
adequados para aplicações onde o objeto de interesse seja a água.
Fonte: Google Earth Fonte: http://www.fct.unesp.br/unespdataset
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 65
Sistemas LiDAR aerotransportados em aplicações batimétricas
Para as aplicações em batimetria e hidrografia, principalmente em águas
rasas, os sistemas LASER devem operar em outros comprimentos de onda. Nestes casos são usados sistemas a LASER que operam na região verde (532 nm) do espectro eletromagnético.

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 66
Sistemas LiDAR aerotransportados em aplicações batimétricas
Para as aplicações em batimetria e hidrografia, principalmente em águas
rasas, os sistemas LASER devem operar em outros comprimentos de onda. Nestes casos são usados sistemas a LASER que operam na região verde (532 nm) do espectro eletromagnético.
Fonte: http://www.teledyneoptech.com/
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 67
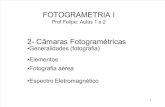
Sistemas LiDAR aerotransportados em aplicações batimétricas
Diagrama ilustrando o processo de propagação do LASER em ALB (Airborne Laser Batymetry). Fonte: Doneus et al. (2015).

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 68
Roteiro para leitura de dados LASER no Erdas Imagine
No Erdas Imagine ativar DataPrep ou Main / Data Preparation - Ativar Create Surface (a janela 3D Surfacing será aberta) - Abrir arquivo com pontos a partir de File / Read - Selecionar a opção Point Data e o tipo de dado (ASCII File) - Selecionar o arquivo de dados e ativar ok - Automaticamente é aberta a janela Import Options - Definir os delimitadores, caracteres de separação colunas desejadas, dentre outros - Ativar ok e aguardar a importação dos dados - Após a importação dos dados ativar a opção Surface / Surfacing - Definir dimensão das células, domínio, cor de fundo, saída (16 bits, 32 bits, ....) - Eqüidistância, ... Como resultado é criado um arquivo imagem (img) e um arquivo com as curvas de nível no formato shapefile.
#################
Aplicativo destinado ao processamento de dados LASER: TerraScan Empresa: Terrasolid (http://www.terrasolid.com/), Finlândia.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 69
Alguns aplicativos e bibliotecas que permitem a realização de algumas operações com dados LiDAR
LAStools
Conjunto de aplicativos e funções, na forma de uma biblioteca em C++, que permite a realização de operações como conversão, filtragem, visualização, processamento e conversão de dados LiDAR
Formatos aceitos: ASCII, LAS2, LAZ, SHP, dentre outros.
Autor: Martin Isenburg Endereço: http://www.cs.unc.edu/~isenburg/lastools/
2 LAS é um formato de arquivo público, binário, que permite o intercâmbio de dados LiDAR. Comparados com os arquivos binários ASCII os arquivos LAS são bem menores em função da compactação. Mais detalhes sobre este formato podem ser vistos em http://www.asprs.org/a/society/committees/lidar.

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 70
Alguns aplicativos e bibliotecas que permitem a realização de algumas operações com dados LiDAR
LASEdit
Aplicativo que permite a realização de inúmeras operações com dados LiDAR. Formatos aceitos: LAS.
Empresa: Cloud Peak Software, LLC Endereço: http://www.cloudpeaksoftware.com
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 71
Alguns aplicativos e bibliotecas que permitem a realização de algumas operações com dados LiDAR
FugroViewerTM Aplicativo livre que permite a visualização de dados 3D LiDAR Formatos aceitos: Aceita vários formatos, inclusive LAS, LAZ, etc.
Empresa: Fugro Geospatial
Endereço: http://www.fugroviewer.com

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 72
Alguns aplicativos e bibliotecas que permitem a realização de algumas operações com dados LiDAR
Cloud Compare
Aplicativo que permite a realização de inúmeras operações com dados LiDAR. Formatos aceitos: Aceita vários formatos, inclusive LAS, LAZ, etc.
O software Cloud Compare segue a filosofia Open Source Project. Endereço: http://www.cloudcompare.org/
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 73
Alguns aplicativos e bibliotecas que permitem a realização de algumas operações com dados LiDAR
Quick Terrain Modeler
Aplicativo que permite a realização de inúmeras operações com dados LiDAR. A versão de uso livre - Quick Terrain Reader - apresenta limitações em termos de operações mas é uma poderosa ferramenta para a visualização.
Formatos aceitos: Aceita vários formatos, inclusive LAS, LAZ, etc. Endereço: http://www.appliedimagery.com

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 74
Conversão de arquivo ASCII para o formato LAS Aplicativo: LAStools Binário:
txt2las.exe
Exemplo de uso:
Arquivo de entrada: dados_in.txt
Arquivo de saída: dados_out.las
> txt2las –i dados_in.txt –o dados_out.las –parse xyzi Outras opções de conversão > txt2las –i dados_in.txt –o dados_out.las –parse xyz > txt2las –i dados_in.txt –o dados_out.las –parse sxyzi Para outras opções consulte o arquivo txt2las_README.txt
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 75
Aplicação de filtros, de modo a selecionar uma região ou um intervalo de z
Aplicativo: LAStools Binário:
las2las.exe
Exemplo de uso:
Arquivo de entrada: dados_in.txt
Arquivo de saída: dados_out.las
> las2las –i dados_in.txt –o dados_out.las –clip_z Zmin Zmax > las2las –i dados_in.txt –o dados_out.las –clip Emin Nmin Emax Nmax > las2las –i dados_in.txt –o dados_out.las -clip_scan_angle_above 15 Para outras opções consulte o arquivo las2las_README.txt
Estes comandos, bem como outros, serão vistos e utilizados na aula prática.

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 76
Exercícios de aplicação
1) Qual o diâmetro do ponto LASER projetado, considerando que a altura de voo de uma aeronave equipada com um sensor LASER aerotransportado seja de 1200 m e que o ângulo de divergência do pulso LASER seja de 0,5 mrad?
2) Qual a largura da faixa de varredura para um sistema LASER que opera a 750 m AGL e
com FOV de 60o?
3) Considerando uma aeronave equipada com um sistema a LASER com frequência de geração de pulsos de 10 kHz, frequência de varredura de 30 Hz, ângulo de divergência de 0,5 mrad e operando a 750 m AGL, pergunta-se: a) Qual é a largura da faixa varrida, o diâmetro do footprint, a distância entre os pontos ao longo da trajetória e na direção transversal, sabendo que o ângulo de abertura seja 30 graus e que a velocidade da aeronave seja de 216 km/h?
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 77
Exercícios de aplicação (cont.)
4) A partir dos gráficos mostrados, disponibilizado pela RIEGL, para o sistema LMS-Q680i operando com taxas de repetição de pulso de 80 kHz e 300 kHz, respectivamente, quais devem ser as velocidades de operação da aeronave (em m/s) para o caso de um voo a 3100 pés, nas duas frequências, considerando que deseja-se uma densidade de pontos da ordem de 5 pontos/m2?
Obs: 1 nó (knots, kn) = 1,852 km/h = 0,514 m/s

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 78
Exercícios de aplicação (cont.)
5) Qual o diâmetro do pulso LASER projetado no terreno, considerando que a altura de voo sobre o nadir seja de 1200 m, que a inclinação do terreno seja 15º e que o ângulo de divergência do pulso LASER seja de 0,5 mrad, conforme figura abaixo?
Ângulo de divergência do pulso (γ)
α
Altura de voo (H)
Emissor LASER
Terreno com inclinação α
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 79
Exercícios de aplicação (cont.)
6) Considerando a figura abaixo, onde o terreno possui inclinação α=15º, que a altura de voo sobre o ponto nadir seja de 1200 m e que o ângulo de abertura do sistema LASER aerotransportado seja θ=60º pergunta-se:
a) Qual é a largura da faixa de varredura, no terreno, considerando estes dados? b) Qual a diferença entre o resultado obtido em (a) e o resultado obtido considerando
os mesmos valores de H e θ mas um terreno com inclinação nula?

Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 80
Referências Bibliográficas ASHRAF, M. A.; MAAH, J.; YUSOFF, I. Introduction to Remote Sensing of Biomass, ATAZADEH, I. (Ed.), ISBN: 978-953-307-490-0, 2011. InTech, Available from: http://www.intechopen.com/books/biomass-and-remote-sensing-ofbiomass/introduction-to-remote-sensing-of-biomass ASPRS - American Society for Photogrammetry and Remote Sensing. Positional Accuracy Standards for Digital Geospatial Data. e.1, v. 1, November, 2014. BALTSAVIAS, E. P. Airborne LASER scanning: basic relations and formulas. In.: ISPRS Journal of Photogrammetry & Remote Sensing, 54 (1999), 199-215. BRANDALIZE, A. A. Perfilamento a LASER: comparação com métodos Fotogramétricos. In.: XX Congresso Brasileiro de Cartografia, Anais, CD ROM, Porto Alegre 2001. BRANDALIZE, M. C. B. A qualidade cartográfica dos resultados do LASERSCANNER aerotransportado. Tese: Programa de Pós-Graduação em Engenharia Civil, Universidade Federal de Santa Catarina, Florianópolis, 2004. CALMON, A. T.; MÜLLER, M.; BAUNGARTEN, A. P.; FELIX, D.; MARTINS, M. A. R. Tecnologia de Mapeamento Digital a Laser e suas Aplicações em Hidrologia Urbana. In.: XV Simpósio Brasileiro de Recursos Hídricos: desafios à gestão da água no limiar do século XXI, 2003, Curitiba. Anais do XV Simpósio Brasileiro de Recursos Hídricos, 2003, 23 - 27 Nov. 11 p. DALMOLIN, Q.; SANTOS, D. R. dos Sistema LASERSCANNER: Conceitos e princípios de funcionamento. 3ª Edição. Universidade Federal do Paraná, Curitiba, 2004. 97p. ISBN 85-88783-0601. DONEUS, M.; MIHOLJEK, I.; MANDLBURGER, G.; DONEUS, N.; VERHOEVEN, G.; PREGESBAUER, M. Airborne LASER bathymetry for documentation of submerged archaeological sites in shallow water. In.: IAPRS, Volume XV-5/W5, Piano di Sorrento, Italy, 2015. p. 99-107.
Notas de Aula de Fotogrametria / 2018 / Dep. de Cartografia / Prof. Mauricio Galo 81
EL-SHEIMY, N. Digital Terrain Modelling. The University of Calgary, Geomatics Engineering Department, Calgary, 1999. EL-SHEIMY, N.; VALEO, C.; HABIB, A. Digital Terrain Modeling – Acquisition, Manipulation and Applications. Boston: Artech House Inc., 2005. 257 p. HABIB, A. Accuracy, quality assurance, and quality control of LiDAR data. In: SHAN, J.; TOTH, C. K. (Editors) Topographic laser ranging and scanning: principles and processing. Boca Raton, FL: CRC/Taylor & Francis, Chapter 9, 2008. HABIB, A.; BANG, K. I.; KERSTING, A. P.; CHOW, J. Alternative methodologies for LiDAR system calibration. In.: Remote Sensing, no 2, pp. 874-907, 2010. KRAUS, K. Photogrammetry: geometry from images and laser scans. Berlin: Walter de Gruyter, 2007. LOHANI, B. Airborne Altimetric LiDAR: Principle, Data Collection, Processing and Applications. Disponível em: <http://home.iitk.ac.in/~blohani/>, Indian Institute of Technology Kanpur, 2008. Acesso: Abril 2008. REDDING, B.; CHOMA, M. A; CAO, H. Spatial coherence of random LASER emission. In.: Optics Letters, Vol. 36, No 17, September, 2011. p. 3004-3406. SAMBERG, A. An implementation of the ASPRS LAS standard. In.: IAPRS, Volume XXXVI, Part 3 / W52, 2007. p. 363-372. SHAN, J.; TOTH, C. K. (Editors) Topographic laser ranging and scanning: principles and processing. Boca Raton, FL: CRC/Taylor & Francis, 2008. WEHR, A.; LOHR, U. Airborne LASER scanning – an introduction and overview. In.: ISPRS Journal of Photogrammetry & Remote Sensing, 54 (1999), p. 68 – 82.