notas_de_aula_geob12_parte_2.pdf
199
-
Upload
jose-luis-silva -
Category
Documents
-
view
7 -
download
1
Transcript of notas_de_aula_geob12_parte_2.pdf
-
CAPITULO 3
Tracado de Raios
A propagacao de sinais ssmicos em um meio pode ser representada de diversas ma-
neiras, tais como modelos analticos, diferencas nitas e tracados de raios. A modelagem
analtica e bastante eciente computacionalmente porem restringe-se a casos relativamente
simples, tornando-a limitada. Atraves das diferencas nitas podemos modelar meios com-
plexos, contudo seu custo computacional e mais elevado. A modelagem utilizando tracados
de raios permite modelar meios com exatidao e eciencia computacional.
Um raio e o caminho seguido pela energia indo de uma fonte a um receptor, ou seja, sao
tracados raios perpendiculares a`s frentes de onda (para um meio isotropico), que representa a
geometria ou tracado de raio. Estendendo esta abordagem para meios anisotropicos, perde-
se a perpendicularidade entre os raios e as frentes de ondas, formando assim um tracado
curvo.
3.1 Tracados de raios retos
Quando os contrastes de velocidade num modelo geologico sao relativamente baixos, o angulo
de transmissao do raio, entre as interfaces, pode ser considerado constante. Entao, pode-
se aproximar a propagacao de ondas no modelo por raios retos entre a fonte e o receptor.
Essa modelagem tem alta eciencia computacional mas limita-se a modelos com pequenas
variacoes de velocidade.
3.2 Tracados de raios curvos
Quando o contraste de velocidade tem um valor mais acentuado, a ideia de raios retos nao
pode ser aplicada, e entao utilizamos uma outra ideia de transmissao que se baseia num
tracado de raio curvo.
Uma forma de se analisar o tracado de raio curvo e pelo princpio de Fermat, que
estabelece que a energia se propaga ao longo de caminhos que tornam o tempo de transito
mnimo, sendo este caminho modelado por um ente matematico denominado raio.
18
-
19
Matematicamente, o tempo de percurso de um raio, viajando de um ponto P1 a um
ponto P2, e dado por:
t =
P2P1
n(x, z)
cdl, (3.1)
onde t e o tempo de transito, n(x, z) = c/v(x, z) e a distribuicao dos ndices de refracao
em um meio bidimensional, sendo c a velocidade do som em um meio de referencia e dl e a
diferencial do comprimento do arco ao longo do raio.
Pelo princpio de Fermat o caminho do raio sera aquele para o qual a integral acima e
um valor estacionario, logo:
I =
P2P1
n(x, z)dl, (3.2)
onde I e o caminho do raio.
Analisando a equacao (3.1) percebe-se que a integral nao tem um carater linear, ou
seja, l e n(x, z) nao sao independentes mas que uma e funcao da outra.
Uma forma de se contornar este problema e linearizando a equacao, para isto, podemos
utilizar a expansao em serie de Taylor e desprezar os termos de ordem igual e superior a dois,
pois caso contrario continua-se com um problema nao-linear. Aplicada a expansao tem-se
que:
t = Gs, (3.3)
onde t representa a variacao do tempo de percurso resultante da perturbacao s na dis-
tribuicao da vagarosidade, e G representa a distancia percorrida pelo raio.
3.2.1 Equacao do raio
A equacao de Euler e uma condicao necessaria para a existencia de um valor extremo da
integral variacional para o calculo do comprimento acustico (Terra, 2007). Utilizando-se
esta equacao podemos obter uma equacao diferencial para uma famlia de raios em um meio
homogeneo:d
dl
(ndr
dl
)= n, (3.4)
onde r e o vetor posicao de um ponto qualquer ao longo de um raio, n = dn/dr e o
gradiente do ndice de refracao, e dr/dl e o vetor unitario tangente ao raio em (x, z).
Esta equacao diferencial e denominada de equacao do raio e para uma certa vizinhanca
regular sua solucao representa os raios de menor comprimento.
Desenvolvendo a equacao acima obtemos:
dn
dl
dr
dl+ n
d2r
dl2= n, (3.5)
-
20
contudo, temos que:dn
dl=
dn
drdr
dl= n
dr
dl. (3.6)
Substituindo a equacao 3.6 em 3.5, temos:(n
dr
dl
)dr
dl+ n
d2r
dl2= n. (3.7)
Contudo, na forma apresentada, esta equacao nao e pratica computacionalmente. Para
contornarmos este problema, podemos expandir a funcao vetorial r(l) em serie de Taylor e
considerando os tres primeiros termos, temos:
r(l + l) = r(l) +dr
dll +
1
2
d2r
dl2l2, (3.8)
onde l e um incremento no comprimento do raio.
Isolando o vetor curvatura d2r/dl2 na equacao (3.7) e substituindo na equacao (3.8),
chegamos a seguinte expressao:
r(l + l) = r(l) +dr
dll +
1
2n
[n
(n
dr
dl
)dr
dl
]l2. (3.9)
Considerando dois pontos distintos do raio P1 (xk, zk) e P2 (xk+1, zk+1) separados por
uma distancia l, o vetor unitario na direcao de propagacao pode ser escrito como:
dr
dl= (cosk)i + (senk)k, (3.10)
onde i e k sao os vetores unitarios nas direcoes x e z e k e o angulo entre as direcoes tangente
ao raio e horizontal na iteracao k. Os valores do seno e do cosseno podem ser obtidos por:
senk =zk+1 zk
l, (3.11)
cosk =xk+1 xk
l. (3.12)
O gradiente do ndice de refracao e dado por:
n =n
xi +
n
zk. (3.13)
Sendo d o produto interno da equacao (3.9):
d = n dr
dl= nx cosk + nz senk, (3.14)
onde:
nx =n
xe nz =
n
z. (3.15)
-
21
Utilizando diferencas nitas podemos aproximar as derivadas direcionais do meio dis-
cretizado por:
nx(i, j) =n(i + 1, j) n(i 1, j)
2x, (3.16)
e
nz(i, j) =n(i, j + 1) n(i, j 1)
2z. (3.17)
O proximo ponto do raio pode ser estimado como:
xk+1 = xk + coskl +1
2nk(nk,x dk cosk)l
2, (3.18)
e
zk+1 = zk + senkl +1
2nk(nk,z dk senk)l
2, (3.19)
onde nk e o ndice de refracao; nk,x e a derivada de nk na direcao x e nk,z e a derivada de nk
na direcao z; l e constante e representa o deslocamento do raio, e dk e a derivada direcional.
O ndice de refracao pode ser escrito como:
nk =c
Vk= csk, (3.20)
onde sk e a vagarosidade referente a velocidade Vk. Substituindo esta equacao nas equacoes
(3.19) e (3.18), tem-se:
xk+1 = xk + coskl +1
2sk(sk,x dk cosk)l
2, (3.21)
e
zk+1 = zk + senkl +1
2sk(sk,z dk senk)l
2, (3.22)
sendo dk agora denido por:
dk = cdk = sk,x cosk + sk,z senk. (3.23)
Entao, a partir do conhecimento de sua posicao atual (xk, zk) e de um angulo k pode-se
obter, sucessivamente, os pontos seguintes do raio.
Podemos perceber que a posicao do raio e funcao da vagarosidade do meio. Contudo, se
soubermos qual a real vagarosidade nao seria necessario e nem teria sentido fazer a inversao.
Portanto, o processo inverso e realizado porque a vagarosidade utilizada no tracado de raios
nao e a verdadeira, apesar de nao podermos determinar a vagarosidade real, podemos achar
uma melhor aproximacao dela.
A vagarosidade utilizada no tracado de raios pode ser obtida utilizando-se informacoes
de log sonico ou de algum conhecimento geologico da area.
-
22
Para se tornar o meio contnuo e necessario realizar algum tipo de interpolacao na
distribuicao das vagarosidades e de suas derivadas parciais. Considerando a interpolacao
bilinear descrita por Anderson e Kak (1982), que considera os quatros vertices do retangulo
da atual coordenada do raio, temos que a vagarosidade de cada retangulo e assumida para o
vertice de menor coordenada, ou seja, num retangulo compreendido entre os ndices i, i+1,
j e j+1 sera considerada para o ponto A de coordenadas (i, j). A interpolacao para o ponto
(xk, zk) dentro do retangulo e dada por:
sk = pAsA + pBsB + pCsC + pDsD, (3.24)
sk,x = pAsA,x + pBsB,x + pCsC,x + pDsD,x, (3.25)
sk,z = pAsA,z + pBsB,z + pCsC,z + pDsD,z , (3.26)
onde s e a vagarosidade no vertice , s,x e s,z sao as derivadas parciais da vagarosidade
nos vertices ( = A, B, C e D) do retangulo que o raio percorre; p representa os pesos
de cada elemento; sk representada a vagarosidade interpolada e, sk,x e sk,z representam a
interpolacao das derivadadas direcionais. A Figura 3.1 ilustra uma interpolacao bilinear.
Figura 3.1: Interpolacao bilinear de um campo discretizado.
Os pesos de cada elemento da interpolacao podem ser calculados por:
pA = 1 px pz + pxz, (3.27)
pB = px pxz, (3.28)
pC = pz pxz, (3.29)
pD = pxz, (3.30)
-
23
onde:
px =xk xA
x, (3.31)
pz =zk zA
z, (3.32)
pxz = pxpz, (3.33)
pA + pB + pC + pD = 1. (3.34)
Esta metodologia, tracamento de raios, foi implementada computacionalmente em lin-
guagem Fortran por Schots (1990) baseado no trabalho de Anderson e Kak (1982), tornando
possvel realizar o tracado de raios em meios geologicamente complexos.
3.3 Discretizacao do meio
Para uma abordagem tomograca necessitamos discretizar o meio, ou seja, dividi-lo para
que este possa ser tratado computacionalmente. No caso 2D, o procedimento consiste em
dividir o meio em blocos retangulares de dimensoes x e z como mostrado na Figura 3.2.
A partir desta divisao podemos determinar com a equacao do raio a distancia que cada
raio percorre em cada bloco e desta forma montar a matriz tomograca, ou seja, dividiremos
o meio em celulas.
Figura 3.2: Modelo discretizado.
Apesar, da frente de onda percorrer todo o meio, os raios nao o farao, visto que este
e apenas um ente matematico que indica o caminho que a onda percorre. Logo, torna-se
necessario uma boa disposicao de fontes e receptores e uma boa discretizacao do meio a m
de que nao ocorra um ma iluminacao do meio.
-
24
3.4 Ligacao entre fonte e receptor
Um problema no tracado de raios e o de mirar o receptor corretamente, ou seja, predizer qual
deve ser o angulo de lancamento de um raio que se deseja captar em um determinado receptor.
Quando o meio considerado e homogeneo, um raio reto liga o par fonte/receptor mas quando
o meio e heterogeneo, os raios percorrem meios complexos, dicultando a previsao do angulo.
Este problema de se estabelecer a ligacao entre fonte e receptor e denominado de ray
linking podendo ser resolvido por diversos metodos, como exemplo temos:
3.4.1 Metodo de canhoneio (shooting method)
Neste metodo todos os caminhos dos raios sao tracados a partir de dois angulos iniciais, um
maximo (max) e outro mnimo (min) e de um incremento angular () tal que se faz variar
o angulo de emissao entre esses dois extremos com o valor do incremento angular, dado por:
i = min + i, (3.35)
onde i = 0, 1, 2, ... ate que o valor maximo seja atingido, como mostrado na Figura 3.3.
Figura 3.3: Representacao esquematica do metodo de canhoneio.
O angulo de lancamento adotado sera aquele para o qual o raio mais se aproxime do
receptor. Contudo, apesar deste metodo se baseiar numa ideia singular seu custo computa-
cional e bastante elevado, sendo seu uso indicado em casos que a vagarosidade do meio sofra
fortes variacoes.
-
25
3.4.2 Metodo de ligacao (linking method)
O metodo baseia-se no tracamento de tres raios a partir de um raio inicial com um
angulo inicial de lancamento (1) e de um incremento angular (), tal que os outros dois
raios possuirao angulos de lancamentos dados por:
2 = 1 + e 3 = 1 , (3.36)
sendo o angulo de partida (1) formado pela linha reta que liga a fonte e o receptor e a
horizontal.
Tracando-se os tres raios, podemos aplicar o renamento de Newton-Raphson, entao
encontra-se uma estimativa para o proximo angulo de lancamento (
1) que estara mais
proximo do receptor, sendo dado por:
1 = 1 2d1rd23
, (3.37)
onde d1r e a distancia entre as coordenadas do ponto nal do raio 1 e do receptor, d23 e a
distancia entre as coordenadas dos pontos terminais dos raios 2 e 3 e o sinal escolhido para
a equacao acima sera positivo caso encaminhe o novo angulo (
1) no sentido do receptor e
negativo caso contrario, como mostrado na Figura 3.4.
Figura 3.4: Representacao esquematica do metodo de ligacao.
-
26
Este processo de renamento dever-se-a repetir ate que a diferenca entre as posicoes -
nais dos raios e as posicoes dos receptores possuam um erro aceitavel, estipulado inicialmente,
levando-se em conta as heterogeneidades do modelo.
No presente trabalho foi utilizada esta metodologia como solucao para o problema de
ligacao fonte-receptor.
-
1Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
GEOB12 GEOB12 Propagao de Ondas ElsticasPropagao de Ondas Elsticas
Tomografia SsmicaTomografia SsmicaTomografia SsmicaTomografia Ssmica
1
Amin BassreiIGEO/CPGG/UFBA
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Estrutura da apresentao
Introduo Tomografia de tempo de trnsito Tomografia de difrao Regularizao
2
5 Exemplos
-
2Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Introduo - Definio
T fi bl i Tomografia: problema inverso Tomografia: tomo + grafia Tomo (): fatia Grafia: estudo imagem
3
Grafia: estudo, imagem
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Introduo A tomografia uma tcnica de reconstruo de uma seo
a partir das projees de suas propriedades.p p j p p
Pode-se classificar as tcnicas tomogrficas em duas grandes classes: Tempo de trnsito; Forma de onda.
As tcnicas tomogrficas possuem grande relevncia na
4
As tcnicas tomogrficas possuem grande relevncia na estimao de propriedades de reservatrios (velocidade, anisotropia, etc.)
A inverso tomogrfica geralmente um problema mal-posto.
-
3Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
5
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Histrico
1956 Imageamento em astronomia (Bracewell) 1956 Imageamento em astronomia (Bracewell) 1961 Primeiro relatrio de tomografia mdica 1972 Primeiro tomogrfo de raio X comercial 1977 Geotomografia eletromagntica 1979 Prmio Nobel de Medicina (Hounsfield e Cormack)
6
1984 Tomografia global 1984 Tomografia ssmica (Congresso da SEG em Atlanta)
-
4Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
7
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Levantamento tomogrfico
8
Fonte ssmica Receptores
-
5Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
9
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
10
-
6Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
11
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
12
-
7Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
13
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Tomografia de tempo de trnsito* Tempo de trnsito
*
**
Velocidade (m/
14
***
s)
-
8Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
O tempo de trnsito entre fonte e receptor em um meio discretizado pode ser aproximado por:
Inverso tomogrfica
discretizado pode ser aproximado por:
Utilizando uma notao mais especfica:
15
Onde:
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Para uma determinada matriz G, obtm-se a seguinte formulao linear para tomografia de tempo de trnsito:
Inverso tomogrfica
formulao linear para tomografia de tempo de trnsito:
Onde G o caminho do raio entre a fonte e o receptor:
16
Porm G funo de s (problema no-linear).
-
9Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Para uma inverso linearizada, tem-se que:
Inverso tomogrfica
Atualizam-se os parmetros atravs da expresso:
Como G f no de m (problema no linear) fa se
17
Como G funo de m (problema no-linear), faz-se necessrio atualizar a matriz G atravs de novo traado de raios com os parmetros atualizados.
Repete-se o processo at atingir a convergncia de m.
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Em aplicaes tomogrficas, faz-se necessrio descobrir
Ligao fonte/receptor
o ngulo necessrio para que o raio originrio em uma determinada fonte atinja um determinado receptor.
Este problema denominado ray linking, sendo resolvido por duas abordagens principais:
Busca linear do ngulo de emisso;
18
Busca linear do ngulo de emisso;
Busca do ngulo utilizando o mtodo de Newton-Raphson.
Caso o meio possua variaes muito acentuadas de ndices de refrao, pode-se dificultar o ray linking.
-
10
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Ray linking:Ligao fonte/receptor
z
Fonte Receptor
x
mximomnimo
19
mnimo
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
A tomografia geofsica de difrao um mtodo de inverso tomogrfica que utiliza a forma de onda para
Tomografia de difrao
obter uma imagem da subsuperfcie: Entrada (dados medidos): campo espalhado medido
nos receptores; Sada (parmetros estimados): velocidade do meio
2D.
20
Como a tomografia geofsica de difrao um problema mal-posto, faz-se necessrio utilizar algum tipo de regularizao.
-
11
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Clculo do campo espalhadoCampo total Campo incidente Campo espalhado
- =
21
Ponto difrator Meio homogneo Ponto difrator
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Diferenas finitas Modelagem direta caso acstico 2D:
)(1)()( 222 tftftf Espao aproximao de quarta ordem:
Tempo aproximao de segunda ordem:
.),,(),(
1),,(),,(2
2
22
2
2
2
ttzxf
zxcztzxf
xtzxf
=
+
( ). 16301612
121122
''++ ++= iiiiii fffffhf
22
Tempo aproximao de segunda ordem:.2 2
11''
hffff iiii +
+=
-
12
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Partindo da equao de Helmholtz:Tomografia de difrao
22
Funo objeto que descreve o meio 2D:
Soluo integral (Lippman-Schwinger):
.0,(][ )22 =+ rPk
.)(
1)( 2
20
rr
c
cO =
23
g ( pp g )
'.)]'()'([)'|()'()( 0)'(
20 rrrrrrr
rdPPGOkP SCAT
ASCAT +=
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Assumindo espalhamento fraco, o campo acstico total pode ser aproximado pelo campo incidente.
Tomografia de difrao
p p p
Utilizando funes de Green:
Campo espalhado registrado no receptor rG:.')|'()'|()'(),(
)(
20 =
rrrrrrrrr
ASGGSSCAT dGGOkP
).|'()'(0 SGP rrr =
24
O qual pode ser discretizado levando a uma relao linear (d=Am) que pode ser invertida para recuperar O(r).
Assim, pode-se aplicar regularizao para recuperar o modelo.
)(rA
-
13
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Regularizao Os problemas inversos em geofsica so em geral mal-
postos:p Geometria de aquisio de dados limitada; Dados qualitativamente insuficientes (iluminao inadequada); Rudo.
Conseqncia: pequenas variaes nos dados podem i d i l
25
ocasionar grandes variaes na soluo.
Soluo: a regularizao permite que solues adequadas sejam obtidas para problemas mal-postos.
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Regularizao As solues so obtidas a partir da minimizao
ponderada do erro e da derivada do modelo:ponderada do erro e da derivada do modelo:
A soluo com regularizao dada por:m = (ATA+DTD)+ATd.
(m) = eTe + (Dnm)T(Dnm).
26
Na qual D um operador derivativo e chamado de fator ou parmetro de regularizao, o qual equilibra o compromisso entre erro e suavidade na soluo.
-
14
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Curva L A curva L um critrio heurstico para a
escolha do parmetro timo de regularizao.regularizao.
Lawson e Hanson (1974) no livro Solving Least Squares Problems apresentam um grfico precursor da curva L como mtodo de anlise para o MMQ amortecido (regularizao de ordem 0).
Hansen criou a denominao curva L, publicando o primeiro artigo sobre a mesma
27
publicando o primeiro artigo sobre a mesma em 1992.
Tambm so de autoria de Hansen um livro sobre problemas mal-postos (1998) bem como um pacote de funes de regularizao (1992).
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Curva LCada ponto da curva L corresponde a um determinado
parmetro de regularizao () utilizado na inverso.
2
1
||Dnm||2
28
3 4 5||e||2Joelho da curva ( timo).Ponto de mxima curvatura.
-
15
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Exemplo 1 (dado real)
EOR E h d Oil R EOR Enhanced Oil Recovery Midway Sunset Field, California
29
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
30
-
16
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
31
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
32
-
17
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
33
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
34
-
18
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
35
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
36
-
19
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
37
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
38
-
20
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
39
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
40
-
21
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
41
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
42
-
22
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Exemplo 2 (dado real)
I t d i t d f lh Imageamento de um sistema de falhas Campo McKittrick, California Reservatrio: formao Potter
43
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
44
-
23
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
45
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
46
-
24
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
47
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
48
-
25
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Exemplo 3 (dado real) Campo de testes do MIT em Michigan. Malhas: 40 40 e 100 100. Geometria interpoo com 118 fontes e 201 receptores. Tempos de trnsito: 23.718 (3.171 com erro de picking). Inverso utilizando conjugado gradiente:
49
j g g Fator de regularizao atenuado ao longo da inverso; Fator de regularizao escolhido utilizando a curva L; Fator de regularizao escolhido utilizando a curva .
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Dados reais Adversidades encontradas:
Quantidade de dados;
Tempo de processamento;
Regies no iluminadas pelos raios;
Traado de raios / ray-linking em meio com fortes
50
heterogeneidades no campo de velocidades;
Rudo;
Erros de picking.
-
26
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Tempos de trnsito (erros de picking)10
0 14
0.15Tempo em segundos
Fontes
20
30
40
50
60
70
800 1
0.11
0.12
0.13
0.14
51
20 40 60 80 100 120 140 160 180 200
90
100
110
0.08
0.09
0.1
Receptores
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Geologia do campo de testes
52
-
27
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Inverso tomogrfica (4040)Deslocamento (m)
Prof
undi
dade
(m)
Velo
cida
de (m
/s)
53
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Inverso tomogrfica (100100)Deslocamento (m)
Prof
undi
dade
(m)
Velo
cida
de (m
/s)
54
-
28
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Exemplo 4 (dado real)
T fi d dif Tomografia de difrao Corpo de sal Grande contraste de velocidade
55
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
56
-
29
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
57
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
58
-
30
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
59
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
60
-
31
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Simulaes numricas com dados sintticos corrompidos por 1% de rudo aditivo gaussiano foram realizadas para validar o efeito d l i
Exemplo 5 (simulao numrica)
da regularizao.
Foi utilizada a geometria XWP (interpoo) para os testes com o ponto difrator e com o crculo difrator.
Para o modelo sinttico de reservatrio, foi realizada uma comparao entre as geometrias XWP e VSP.
61
O campo espalhado foi calculado a partir de um modelo sinttico utilizando diferenas finitas, assumindo uma assinatura da fonte Ricker.
A curva L foi obtida para cada inverso para selecionar o melhor fator de regularizao.
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
A aquisio foi simulada com 16 fontes e 16 receptores com espaamento uniforme de 10 metros:
Simulao numrica
p Dados possuem duas partes: real e imaginria; Quantidade de dados: 16 16 2 = 512.
Os modelos foram discretizados em malhas 15 15 Quantidade de incgnitas: 15 15 = 225.
62
Logo, o sistema resultante sobredeterminado. As geometrias de poo nico e de superfcie (ssmica
convencional) no produziram resultados adequados.
-
32
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Modelo do ponto difrator
cida
de (m
/s)
cida
de (m
/s)
dida
de (m
)Deslocamento (m)
Malha do modelo do ponto difrator.
Velo
Eixo x (clulas)Eixo z (clulas)Modelo com velocidade do meio constante (4,000 m/s)
e um bloco que a perturbao central (4,100 m/s).
Velo
c
Prof
und
||e||
(m/s
)
63
Curva L para regularizao de ordem 1. Inverso regularizada:=0,004498; RMSc=0,045%.
Eixo x (clulas)Eixo z (clulas)
||Dm
||
Velo
cida
de
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Modelo do crculo difrator
cida
de (m
/s)
cida
de (m
/s)
dida
de (m
)
Deslocamento (m)
Modelo com velocidade do meio constante (3,000 m/s)e uma perturbao circular central (3,300 m/s). Malha do modelo do crculo difrator.
Velo
Eixo x (clulas)Eixo z (clulas)
Velo
c
Prof
und
||e||
(m/s
)
64
Curva L para regularizao de ordem 1. Inverso regularizada:=0,01333; RMSc=0,52%.
Eixo x (clulas)Eixo z (clulas)
||Dm
||
Velo
cida
de
-
33
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Anlise XWP VSP
dade
(m/s
)
ade
(m/s
)
ade
(m)
Deslocamento (m)
Modelo sinttico de reservatrio (XWP). Modelo verdadeiro (malha).
Velo
cid
Eixo x (clulas)Eixo z (clulas)
Velo
cida
Prof
undi
da
||e||
(m/s
)
65
Curva L para regularizao de ordem 1.Inverso regularizada (XWP):=0,5761; RMSc=0,48%.
Eixo x (clulas)Eixo z (clulas)
||Dm
||
Velo
cida
de
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Anlise XWP VSP
dade
(m/s
)
ade
(m/s
)
ade
(m)
Deslocamento (m)
Modelo sinttico de reservatrio (VSP). Modelo verdadeiro (malha).
Velo
cid
Eixo x (clulas)Eixo z (clulas)
Velo
cida
Prof
undi
da
||e||
(m/s
)
66
Curva L para regularizao de ordem 2.Inverso regularizada (VSP):=1,0305; RMSc=0,53%.
Eixo x (clulas)Eixo z (clulas)
||Dm
||
Velo
cida
de
-
34
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
Soluo MMQ sem regularizaoVe
loci
dade
(m/s
)
Velo
cida
de (m
/s)
ocid
ade
(m/s
)
ocid
ade
(m/s
)
Eixo x (clulas)Eixo z (clulas)
V
Eixo x (clulas)Eixo z (clulas)
Ve
Inverso regularizada (VSP):RMSc=0,53%.
Inverso regularizada (XWP):RMSc=0,48%.
67
Soluo MMQ (XWP):RMSc=0,53%.
Soluo MMQ (VSP):RMSc=0,61%.
As solues obtidas aplicando somente o MMQ sem regularizao podem levar a resultados inferiores ou infactveis.
Eixo x (clulas)Eixo z (clulas)Ve
loEixo x (clulas)Eixo z (clulas)
Velo
Universidade Federal da BahiaCurso de Ps-graduao em Geofsica
GCV - XWP
dade
(m/s
)
ade
(m/s
)
ade
(m)
Deslocamento (m)
Modelo sinttico de reservatrio (XWP). Modelo verdadeiro (malha).
Velo
cid
Eixo x (clulas)Eixo z (clulas)
Velo
cida
Prof
undi
da
de (m
/s)
68Curva GCV para regularizao de ordem 1.
Inverso regularizada (XWP):=0,5457; RMSc=0,48%.
Eixo x (clulas)Eixo z (clulas)
G()
Velo
cida
d
-
Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007)
Criterios de Selecao de Valores Singulares em Problemas Inversos Lineares:uma Aplicacao em Tomografia de Tempos de Transito
Selection Rules for Singular Values in Linear Inverse Problems:an Application on Traveltime Tomography
Jose Nilson Pereira SilvaInstituto de Geociencias UFBASalvador, BA, Brasil 40001-970
Amin BassreiInstituto de Fsica e CPGG UFBASalvador, BA, Brasil 40001-970
Os problemas inversos da Geofsica geralmente podem ser formulados como um sistema deequacoes lineares. Tais problemas inversos sao geralmente mal-postos, isto e, suas solucoessao condicionadas pelos aspectos da existencia, unicidade e estabilidade. A tomografiassmica e uma tipo especial de problema inverso, que permite estimar uma funcao a par-tir de uma integral de linha da mesma. Na tomografia de tempos de transito, objeto destetrabalho, a incognita do problema, ou seja, o vetor de parametro de modelo, e a distribuicaobi-dimensional de vagarosidades, que e obtida a partir do conhecimento dos tempos detransito entre fontes e receptores, que vem a formar o vetor de parametro de dado. Uti-lizando dados sinteticos fizemos varias simulacoes numa aplicacao de tomografia de temposde transito de transmissao. O exemplo, de medio porte, e uma idealizacao de um reservatoriode hidrocarbonetos. Foi incorporado rudo gaussiano aos tempos de transito em diferentesnveis. Os resultados foram satisfatorios, gerando tomogramas bastante semelhantes aosvalores verdadeiros.
Palavras-chaves: Problemas Inversos, Sismologia de Exploracao, Tomografia deTempos de Transito, Decomposicao por Valores Singulares.
The inverse problems of Geophysics, in a general way, can be formulated as a system of linearequations. These inverse problems, in the whole, are bad formulated, that is, their solutionsmust satisfy the existence, uniqueness and stability conditions. The seismic tomography isa special type of inverse problem that gives an estimation of a function from a line integralof that function. In the transit-time tomography, the subject of this work, the variable ofthe problem, that is, the parameter vector of the model is the slowness two-dimensionaldistributions, which is obtained from the knowledge of transit-times between sources andreceptors, so establishing the parameter vector of data. By using trial data we make manysimulations testing the transit-time tomography of transmission. This example, as one ofmedium size, is an idealization for a hydrocarbons reservoir. We merge to the transit-timesgaussian noise at different levels. The results were satisfactory with tomograms very similarto the real values.
Key-words: Inverse Problems, Exploration Seismology, Transit-time Tomogra-phy, Singular Values Decomposition.
I. INTRODUCAO
Endereco Eletronico: [email protected]
Tomografia e a tecnica utilizada para gerarimagens de secoes transversais de um objetoa partir de dados de reflexao ou de trans-missao. Essa tecnica foi utilizada inicialmenteem imageamento medico e em testes nao des-
32
-
Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007) Criterios de Selecao de Valores Singulares em ...
trutivos. No entanto, hoje mostra-se tambemadequada a`s aplicacoes geofsicas tanto naGeofsica da Terra Solida quanto na Geofsicade Exploracao. Nos ultimos anos a geotomo-grafia tem sido bastante utilizada na constru-cao de imagens da subsuperfcie, em particularna caracterizacao e no monitoramento de reser-vatorios. Isto se deve pelo fato da mesma setratar de uma ferramenta que apresenta menosrestricoes quanto a` complexidade das estru-turas geologicas.
A tomografia e um tipo de problema in-verso, expresso matematicamente por d = Gm,onde d e o vetor de parametros de dado, Ge a matriz tomografica, e m e o vetor deparametros de modelo, este ultimo sendo aincognita do problema. Para a solucao do pro-blema inverso via de regra precisamos obter amatriz pseudo-inversa G+, tambem chamadade inversa de Moore-Penrose. Para tanto, uti-lizamos o metodo da decomposicao por valoressingulares, ou SVD, do ingles singular valuedecomposition. O SVD fornece os valores sin-gulares da matriz G, geralmente apresentadasem ordem decrescente. Os valores singularespequenos devem ser evitados, pois distorcema solucao do problema, no caso, os tomogra-mas estimados. O objetivo principal deste tra-balho e a selecao dos valores singulares, demodo que os pequenos valores sejam excludosdo problema. Utilizamos os criterios: (1) com-portamento de decaimento dos valores singu-lares, (2) a derivada dos valores singulares, (3)o erro entre os vetores de parametros de dadoobservado e calculado, (4) o erro entre os ve-tores de parametros de modelo verdadeiro e es-timado, (5) a energia do vetor de parametros demodelo estimado, e (6) a entropia do vetor deparametros de modelo estimado, determinamosregioes otimas, de modo a escolher o numeroideal de valores singulares a serem incorpora-dos para a construcao da solucao.
A ideia de se fazer esse tipo de selecaodos valores singulares foi sugerida em [1], ondefoi aplicado num pequeno exemplo de tomo-grafia de tempos de transito. No presente tra-balho, a abordagem sugerida e aplicada numexemplo de porte medio, e tambem e realizadoum estudo da influencia do rudo. E digno
de nota mencionar que existem outras alter-nativas de se lidar com o problema dos pe-quenos valores singulares. Por exemplo, aose empregar a regularizacao por matrizes dederivadas, mais conhecida como regularizacaode Tikhonov, podem ser utilizados todos os va-lores singulares. Devido a` regularizacao da ma-triz tomografica, o efeito dos pequenos valo-res singulares sera desprezvel nao comprome-tendo a qualidade da solucao estimada. Inclu-sive, essa tecnica ja e consagrada na literaturageofsica. Uma aplicacao de regularizacao emtomografia de tempos de transito, mesmo ob-jeto de interesse do presente trabalho, pode servista em [2]. Ja em [3] a regularizacao por ma-trizes de derivadas, e aplicada na tomografiageofsica de difracao.
Esse artigo esta dividido em seis partes. Noitem Inversao de Dados e SVD fazemosuma revisao de problemas inversos e do SVD. Aseguir, em Tracado Cinematico de Raios,discutimos o metodo utilizado para a mode-lagem direta, que e o tracado de raios de ondastransmitidas. No item Tomografia Ssmica,apresentamos os fundamentos da tomografiassmica, em particular tomografia de temposde transito, e, os criterios de selecao listadosacima sao discutidos no item Criterios paraa Selecao de Valores Singulares. No itemSimulacoes em Tomografia de Tempos deTransito apresentamos um exemplo com da-dos sinteticos e os resultados das simulacoes, e,por fim, apresentamos as Conclusoes.
II. INVERSAO DE DADOS E SVD
Matematicamente classificamos os proble-mas inversos como problemas do tipo mal-posto ou seja, que nao respeitam pelo menosuma das seguintes condicoes: (i) existencia dasolucao; (ii) unicidade da solucao; e (iii) es-tabilidade da solucao. Os problemas inversosgeofsicos lineares, ou linearizados, podem serformulados como um sistema linear de equacoes[4]:
d = Gm,
33
-
Jose Nilson Pereira Silva e Amin Bassrei Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007)
sendo dT = [d1, d2, d3, ..., dM ] e mT =[m1,m2,m3, ...,mN ]. d representa o vetor co-luna dos parametros de dados observados, m ovetor coluna dos parametros do modelo, e G euma matrizMN de coeficientes que relacionaos vetores d e m. Supondo a matriz G conhe-cida, pode-se resolver o sistema utilizando-seuma matriz inversa, ou seja,
m = G1d.
Entretanto, uma matriz G somente e in-versvel se for quadrada e possuir posto com-pleto. Como este e um caso muito especficoe raro em problemas geofsicos reais, tornam-se necessarios procedimentos de resolucao paramatrizes nao-quadradas e/ou com posto incom-pleto.
Um sistema linear pode apresentar tres pos-sibilidades diferentes de solucao. (1) O sis-tema pode ter uma unica solucao mest. Nestecaso classificamos o sistema como determinado(M = N). (2) O sistema pode apresentar in-finitas solucoes, podendo ser entao chamadode sobredeterminado (M > N). (3) O sis-tema pode nao apresentar nenhuma solucaosendo chamado entao de sistema subdetermi-nado (M < N).
O conceito de inversa generalizada foi desen-volvido inicialmente por Moore e de forma maiscompleta por Penrose [5]. Considere uma ma-triz G de dimensoes M N . Se: (i) GG+G =G, (ii) G+GG+ = G+, (iii) (GG+)T = GG+,e (iv) (G+G)T = G+G, entao a matriz inversade dimensoes N M , denotada por G+, seraunica. O modo mais comum de se calcular apseudo-inversa G+ e usando o SVD [6].
Uma matriz retangular G, de dimensoesM N , com posto k, pode ser decompostacomo:
G = UV T ,
onde U e uma matriz M M que contemos autovetores ortonormalizados de GGT , V euma matriz N N que contem os autovetoresortonormalizados de GTG, e e uma matrizdiagonal, M N , que contem os valores singu-lares () de G, dispostos em ordem decrescente,
isto e, 1 2 ... k.A inversa generalizada e expressa por
G+ = V +UT ,
onde + e uma matriz diagomal N M , quecontem os recprocos dos valores singularesnao-nulos de G, isto e,
+ =
E 0 00 0 0...
.... . .
...0 0 0
,e E e a matriz quadrada diagonal de ordem kexpressa por
E =
11 0 00 12 0...
.... . .
...0 0 1k
.Se a solucao estimada e definida pormest =
G+dobs, entao ela pode ser calculada pelarelacao:
mest = V +UTdobs.
O vetor de parametros de modelo m podeser denotado por mver, se este for o vetor ver-dadeiro, ou por mest, no caso do vetor esti-mado, isto e, o resultado de um processo de in-versao de dados. O vetormver e conhecido ape-nas em exemplos artificiais, geralmente chama-dos de exemplos com dados sinteticos, uma vezque na vida real nunca se conhecemver. Isso sedeve ao fato que, em geral, nao existe acesso di-reto ao interior do planeta, nem mesmo em pro-fundidades mais rasas. Em exemplos sinteticose comum calcular o erro entre mver e mest talqual apresentado no item Criterios para aSelecao de Valores Singulares.
Com o conhecimento mest pode calcularos parametros de dados calculados, pela ex-pressao:
dcalc = Gmest = UV Tmest.
Novamente, no item Criterios para aSelecao de Valores Singulares mostramos
34
-
Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007) Criterios de Selecao de Valores Singulares em ...
como calcular o erro entre dobs e dcalc. Esseerro pode ser calculado sempre, seja em e-xemplos com dados sinteticos, como tambemquando se utiliza dados reais.
III. TRACADO CINEMATICO DERAIOS
Varios metodos estao presentes na literaturapara descreverem o caminho percorrido peloraio entre dois pontos. Dentro do universo dastecnicas de modelamento, o tracado de raio euma das que mais se destacam. A sua prin-cipal utilizacao e na geracao de sismogramas eseccoes ssmicas a partir de ummodelo sinteticoque simula estruturas geologicas. A seguir des-crevemos o algoritmo numerico de segunda or-dem de Anderson & Kak [7], proprio para uti-lizacao em tomografia de tempo de transito po-dendo este ser utilizado tanto na simulacao deproblemas diretos, como tambem em processosde inversao.
Seja a equacao de Euler para o raio na suaforma diferencial:
d
ds(ndrds) = n,
sendo o ndice de refracao n dado por
n(x, z) =c
v(x, z),
onde c e a velocidade do som no meio de re-ferencia, v(x, z) e a velocidade da onda no meio,r e o vetor posicao do raio, dr/ds e o vetorunitario tangente ao raio em (x, z), e ds e o e-lemento de raio. Desenvolvendo a equacao deEuler obtem-se:
dn
ds
drds
+ nd2rds2
= n,
mas,
dn
ds=dn
drdrds
= n drds,
de forma que
(n drds)drds
+ nd2rds2
= n. (1)
Ao desenvolvermos o vetor posicao por umaserie de Taylor no ponto (s+s), onde s e oincremento do raio, e, levando em conta apenasos tres primeiros termos da serie temos que:
r(s+s) = r(s) +drdss+
12d2rds2
s2. (2)
Isolando-se o vetor curvatura (d2r/ds2) naequacao (1) e substituindo em (2), e obtida aseguinte aproximacao para a equacao do raio:
r(s+s) = r(s) +drdss
+12n
[n (n.drds)drds]s2. (3)
Considerando dois pontos quaisquer do raioP1(xk, zk) e P2(xk+1, zk+1) separados por s,o vetor unitario na direcao de propagacao podeser escrito como:
drds
= cosk i+ sen k k,
onde i e k sao, respectivamente, os vetoresunitarios nas direcoes x e z, e e o angulo for-mado entre a direcao do raio e o eixo horizontal.O angulo esta associado a`s coordenadas pelasexpressoes:
sen k+1 =zk+1 zk
s,
e
cosk+1 =xk+1 xk
s.
O gradiente do ndice de refracao e definidocomo:
n = nx
i+n
zk,
e o produto interno que aparece na equacao (3)pode ser escrito da seguinte forma:
n drds
= nx cosk + nz sen k, (4)
onde as derivadas direcionais sao expressas por:
nx =n
x,
35
-
Jose Nilson Pereira Silva e Amin Bassrei Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007)
e
nz =n
z.
Considerando o meio ja discretizado, asderivadas direcionais nx e nz podem ser cal-culadas usando diferencas finitas da seguinteforma:
nx(i, j) =n(i+ 1, j) n(i 1, j)
2x,
e
nz(i, j) =n(i, j + 1) n(i, j 1)
2z.
O ponto seguinte do raio e calculado fazendouso da equacoes acima, de modo que:
xk+1 = xk+cosks+12nk
(nxkdk cosk)s2,
e
zk+1 = zk+sen ks+12nk
(nzkdk sen k)s2,
onde nk representa o ndice de refracao, nxk, enzk as suas derivadas, e dk e o componente daderivada direcional no ponto (xk, zk).
Podemos observar nessa equacao que, se nkfor substitudo por cvk, onde vk representa a va-garosidade do meio, a velocidade c desaparecee as expressoes ficam:
xk+1 = xk+cosks+12vk
(vxkdk cosk)s2,(5)
e
zk+1 = zk+sen ks+12vk
(vzkdk sen k)s2,(6)
sendo
dk = vxk cosk + vzk sen k.
As equacoes (5) e (6) permitem o calculo dotracado do raio entre fontes e receptores. Nestetrabalho foi utilizado o programa FORTRANde tracado de raios desenvolvido por Schots [8].
IV. TOMOGRAFIA SISMICA
A Geofsica de Exploracao tem como umdos seus principais objetivos a obtencao de i-magens precisas da subsuperfcie. Para tal, di-versas tecnicas foram introduzidas na industriado petroleo no decorrer das ultimas decadas. Ageotomografia e uma dessas tecnicas mais re-centes. Historicamente o objetivo principal daSismologia de Exploracao e a determinacao dasvelocidades de propagacao das ondas ssmicasem subsuperfcie. A tomografia ssmica e umatecnica de reconstrucao de imagens a partir dassomas dos valores das propriedades em deter-minadas direcoes [9, 10]. A reconstrucao to-mografica e um tipo especial de problema in-verso que permite estimar uma funcao a par-tir de integrais de linha da mesma. A tomo-grafia surgiu primeiramente na Medicina parao imageamento do corpo humano. Um con-junto de fontes e receptores gira em torno dopaciente de modo a se ter uma varredura com-pleta, o que ira proporcionar imagens de maisalta resolucao. Geralmente na Medicina seutiliza raios-X. Em Geofsica, diferentementeda Medicina, nao se pode realizar uma voltacompleta em torno do objeto de estudo. Aoinves de raios-X se utilizam ondas mecanicas ououtras ondas eletromagneticas. A tomografiassmica e utilizada na exploracao de hidro-carbonetos para a estimacao das propriedadesfsicas da subsuperfcie, particularmente a ve-locidade. Existem duas classes gerais de to-mografia ssmica: a tomografia de difracaoque e uma abordagem dinamica, e a tomo-grafia de tempo de transito, que e uma abor-dagem cinematica. O presente trabalho lidacom a tomografia de tempo de transito, quee assim chamada porque utiliza o tempo detransito entre fontes e receptores. Esses tem-pos de transito constituem o chamado vetorde parametros de dado d, que e a informacaode entrada na inverao tomografica. A ma-triz G utilizada na tomografia descreve a ge-ometria dos raios que conectam fontes e re-ceptores. A informacao de sada inversao to-mografica e o vetor de parametros de modelo,m, que contem os valores de vagarosidade do
36
-
Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007) Criterios de Selecao de Valores Singulares em ...
meio geologico que supostamente tem um reser-vatorio de hidrocarbonetos.
O tempo de transito e a integral de linha davagarosidade ao longo do raio:
t =rs(x, z)dl,
onde t e o tempo de transito, r e a trajetoria doraio ao longo do qual e realizada a integracao,dl e o elemento de raio, e s(x, z) e a vagarosi-dade do meio no ponto (x, z), onde x e z repre-sentam, respectivamente, as coordenadas hori-zontal e vertical.
Como o caminho do raio depende da va-garosidade, a equacao do tempo de transitoe nao-linear. Para simplificar a resolucao doproblema, devemos efetuar a linearizacao, oque e feito pela expansao do tempo de transito,tr = g[s(x, z)], por uma serie de Taylor emtorno do ponto s0, que apos a truncagem dostermos de derivada superior a` primeira, resultana expressao:
t = t0 +g
s|s=s0(s s0).
Numa forma mais compacta a expressao acimapode ser escrita como
t = Gs.
Num processo iterativo, atualizado da k-esimapara a (k+1)-esima iteracao, o vetor t corres-ponde a`s diferencas entre o tempo de transitoobservado tobs e o tempo de transito calculadotcalc,k referente a` vagarosidade estimada da k-esima sest,k. A matriz G contem os elemen-tos gij que correspondem a`s distancias que oj-esimo raio percorre no i-esimo bloco. O vetors corresponde a`s diferencas entre as vagarosi-dades estimadas sest,k+1 e as vagarosidades es-timadas sest,k. Dessa forma a partir da ultimaequacao, podemos obter a seguinte expressaoque fornece o vetor atualizado das vagarosi-dades estimadas, num problema tomograficolinearizado:
sest,k+1 = sest,k +G+[tobs tcalc,k(sest,k)],
onde G+ representa a pseudo-inversa da ma-
triz G, para um dado tracado de raios. Paraum segundo tracado de raios a matriz G seraatualizada, e uma nova pseudo-inversa deveraser calculada, e assim sucessivamente.
As equacoes que descrevem a tomografia detempos de transito, aproximadas por um mo-delo linear, podem entao ser formuladas comod = Gm, o que numa notacao mais especficaseria t = Gs, onde t e o vetor de tempos detransito, G e a matriz que descreve a geome-tria dos raios, e s e o vetor de vagarosidades,que representam as incognitas do problema. Avagarosidade e o recproco da velocidade, istoe, si = 1/vi, i = 1, . . . , N .
Neste trabalho adotamos o ultimo caso, ouseja, o da tomografia linear, onde a geometriados raios nao depende da distribuicao de veloci-dades. Em outras palavras, os raios sao retos, enao ha necessidade de se fazer mais um tracadode raios, nem tampouco de atualizar o vetor devagarosidades estimadas. Essa aproximacao eem geral valida para pequenos contrastes de ve-locidades, ou de vagarosidades. A nossa escolhae justificavel uma vez que o objetivo principalnao e obter imagens de maior resolucao da sub-superfcie, e sim validar um procedimento deselecao de valores singulares.
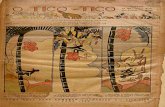
A Figura 1 ilustra um modelo hipoteticopara a geometria de aquisicao poco-a-poco,mostrando a disposicao de fontes e receptores,assim como os caminhos de alguns raios, queconectam fontes e receptores. As fontes, repre-sentadas por estrelas, estao dispostas no pocoa` esquerda, e os receptores, representados portriangulos, estao dispostos no poco a` direita.
V. CRITERIOS PARA A SELECAO DEVALORES SINGULARES
Conforme afirmado na Introducao o em-prego da tecnica SVD esta, via de regra, as-sociada a` existencia dos pequenos valores sin-gulares, que quando utilizados na construcaoda matriz inversa, implicam do comprometi-mento da qualidade da solucao. Quando os va-lores sigulares sao dispostos em ordem descres-cente existe um valor singular limite, de modo
37
-
Jose Nilson Pereira Silva e Amin Bassrei Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007)
que se o proximo valor singular for utilizadoira comprometer a solucao. Por vezes nao epossvel determinar esse ponto otimo. Nestescasos o melhor que se pode fazer e estabele-cer uma regiao, nao de um unico ponto e simde varios ou ate muitos pontos. Para a de-terminacao desse ponto otimo ou dessa regiaootima, propomos a utilizacao dos criterios aseguir.
Amplitude dos valores singulares. Oprograma de SVD fornece os valores singularesem ordem decrescente, isto e, a` medida queo ndice vai aumentando a amplitude do valorsingular vai diminuindo. Os valores singularesagregam informacao que e importante para acontrucao da matriz pseudo-inversa. No en-tanto, a partir de certo valor, essa informacaopassa a ser considerado rudo e compromete aqualidade da solucao estimada. Note-se a ma-triz pseudo-inversa e construda a partir dosvalores de 1/ e nao de .
Derivada do valor singular. A derivadade uma funcao f(x) em um determinado pontox1 denotada por f (x1), e definida pelo limite:
f (xi) = limxi+1xi
f(xi+1) f(xi)xi+1 xi ,
onde f(xi) e f(xi+1) sao, respectivamente, osvalores da amplitude do valor singular em umponto e o seu subsequente. E importantesalientar que, como trata-se de uma curva cres-cente e negativa, os graficos a serem apresen-tados nas figuras foram gerados usando-se omodulo da derivada.
Erro do dado. A partir da analise dos re-sultados obtidos na inversao tomografica torna-se necessario a quantificacao da diferenca entreos tempos de transito observados e os calcula-dos. Esse erro e expresso como:
d =
Mi=1
(tobsi tcalci )2
M,
onde M e o numero de raios (numero de fontes numero de receptores), tobsi sao os temposde transito observados, e tcalci sao os tempos detransito calculados.
Se utilizado em termos de porcentagem, oerro relativo e representado por:
d(%) =
Mi=1
(tobsi tcalci )2Mi=1
(tobsi )2 100.
Erro do modelo. Definimos o erro domodelo como a quantificacao da diferenca en-tre as vagarosidades consideradas como ver-dadeiras e aquelas estimadas para o modelo.O erro do modelo pode ser descrito pela ex-pressao:
m =
Ni=1
(sveri sesti )2
N,
onde N e o numero de blocos da malha, sverisao as vagarosidades verdadeiras, e sesti sao asvagarosidades estimadas.
Se utilizado em termos de porcentagem, oerro relativo e representado por:
m(%) =
Ni=1
(sveri sesti )2Ni=1
(sveri )2 100.
Energia. Definimos por energia do modeloo produto escalar do vetor de vagarosidades es-timadas por ele mesmo, ou seja:
E =Ni=1
(sesti sesti ).
O valor da energia mede o quao estavel e asolucao. Quanto menor for a sua variacao emum determinado intervalo, mais confiaveis saoos resultados obtidos para o mesmo.
Entropia. Definimos como entropia domodelo o somatorio do produto entre a va-garosidade estimada e o logaritmo do inverso
38
-
Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007) Criterios de Selecao de Valores Singulares em ...
da mesma conforme podemos ver na expressao:
H =Ni=1
sesti log1sesti
.
Pela Teoria da Informacao entropia representaa informacao media de um processo. Neste tra-balho solucoes mais suaves estariam associadasa uma menor entropia.
Adicao de Rudo. Foram introduzidosdiferentes nveis de rudos para verificar comose comportariam as curvas que sao geradas emfuncao das vagarosidades. A equacao que de-fine a incorporacao do rudo e expressa por
trj = tobsj + rjt
obsj , j = 1, . . . ,M,
onde trj e o tempo de transito corrompido comrudo gaussiano, tobsj e o tempo de transitolivre de rudo, e o fator de rudo, e rj umae a sequencia de numeros aleatorios na faixa[0.5, 0.5]. Foram introduzidos nas simulacoescinco diferentes nveis de rudo, conforme osseguintes valores de : 0.001; 0.005; 0.01; 0.05;0.1; alem de uma simulacao sem rudo, istoe, com = 0. E digno de nota que o fa-tor de rudo nao deve ser confundido com oangulo do tracado de raios, tambem denotadopor , conforme apresentado no item TracadoCinematico de Raios.
VI. SIMULACOES EM TOMOGRAFIADE TEMPOS DE TRANSITO
O modelo adotado e um meio geologico dis-cretizado em 900 blocos, com 30 blocos na hori-zontal e 30 na vertical, conforme pode ser vistona Figura 2. Cada bloco tem o formato deum quadrado com 30 m de aresta. As prin-cipais feicoes sao uma camada de baixa veloci-dade, com 1.700 m/s e uma heterogeneidadede alta velocidade, com 3.400 m/s, que se-ria o reservatorio com hidrocarbonetos. A to-mografia deve fornecer a velocidade estimadade cada bloco, que modo que seriam entao900 incognitas. A aquisicao de dados e dotipo poco-a-poco, onde 30 fontes estao dis-tribudas com espacamento uniforme no poco
da esquerda, e 30 receptores, tambem comespacamento regular no poco da direita. Dessaforma, o numero de raios, ou o numero deequacoes, ou ainda o numero de informacoes,e 900.
A Figura 3 mostra a curva decrescente dosvalores singulares, onde podemos observar queos valores singulares com ndice acima de 500sao muito pequenos. Uma analise nos valorespermite concluir que o valor singular e virtual-mente nulo em algum ndice entre 800 e 900,de modo que sera dada enfase para esta faixa.
A Figura 4(a) mostra os valores singu-lares entre 800 e 900, onde pode se obser-var uma acentuada queda. Aplicando a escalalogartmica no eixo vertical obtivemos a curvamostrada na Figura 4(b). A derivada da curvada amplitude dos valores singulares e mostradana Figura 4(c). Pela inspecao visual das Figu-ras 4(b) e 4(c) concluimos que o ponto crticoe entre 800 e 830, isto e, a inclusao de valo-res singulares com ndice acima desse ponto iracomprometer a qualidade da solucao.
A aplicacao do criterio do erro dosparametros de dados pode ser visto na Figura5(a), onde se apresenta o valor de d em funcaodo numero de valores singulares, para diferen-tes nveis de rudo. O nvel de rudo e dado peloparametro , que assumiu os valores de 0 (semrudo); 0.001; 0.005; 0.01; 0.05 e 0.1. O graficocomeca em 800, uma vez que se constatou queo ponto crtico e acima de 800. Por questao delimitacao de espaco o grafico completo, ou seja,de 1 a 900 valores singulares nao esta sendomostrado. O fato do erro d aumentar quandose aumenta o nvel de rudo e coerente. Hauma superposicao das curvas para os valores de 0; 0.001 e 0.005. Detalhando mais a escalavertical verificamos que nao ocorreu mais a su-perposicao, conforme pode ser visto na Figura5(b). Entre as tres curvas, ha novamente umacoerencia entre o erro d e o nvel de rudo.Pela Figura 5(b) constatamos que o valor ded e estavel ate aproximadamente 830 valoressingulares, e depois apresenta uma tendenciacrescente. Portanto o numero maximo de valo-res singulares a ser utilizado na inversao deveser algo menor que 830 ou 835. Essa observacaoe coerente com as conlcusoes obtidas a partir
39
-
Jose Nilson Pereira Silva e Amin Bassrei Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007)
das Figuras 4(b) e 4(c).O resultado do criterio do erro dos
parametros de modelo (nao mostrado) indicouque o valor de m e estavel ate aproximada-mente 830 ou 835 valores singulares, e depoiso mesmo apresenta uma tendencia crescente.Essa observacao e identica ao que ocorreu emrelacao do criterio de d, ou seja, o numeromaximo de valores singulares a ser utilizado nainversao deve ser algo menor que 830 ou 835.Esse criterio e o unico que nao pode ser uti-lizado em dados reais, uma que nao se conheceo valor do vetor de vagarosidades verdadeiras(sver). Neste trabalho, a utilizacao do criteriode m e justificada porque as simulacoes lidamcom um conjunto de dados sinteticos, ou seja,existe um conhecimento previo do vetor sver.Alem disso, deseja-se comparar ou ate validaroutros criterios com o do m.
A aplicacao do criterio da energia E dosparametros de modelo pode ser visto na Figura6(a), onde se apresenta o valor de E em funcaodo numero de valores singulares, para os mes-mos nveis de rudo usados acima. Para o casoespecfico da faixa entre 800 e 830 valores sin-gulares, podemos afirmar que o fato das curvaspara = 0.01, = 0.05 e = 0.1 nao se a-presentarem sobrepostas, permite concluir quea energia E e maior, quanto maior for o fator. Todas as curvas apresentam uma abruptavariacao de E em torno de 830 valores sin-gulares, havendo uma total superposicao. AFigura 6(b) apresenta as mesmas curvas comuma mudanca na escala vertical, onde obser-vamos uma ntida separacao entre as seis cur-vas, na faixa entre 830 a 860 valores singulares.Note-se que, diferentemente das figuras para osdois criterios anteriores, efetuamos aqui umareducao da escala. O criterio da energia Esugere que as solucoes sao estaveis ate cercade 830 ou 835 valores singulares, quando entaocomeca uma subita instabilidade, implicandoem solucoes sem nenhum fundamento fsico.Essa observacao reforca as conclusoes obtidasa partir das curvas de d e m.
O criterio da entropia dos parametros demodelo pode ser visto na Figura 7(a), onde seapresenta o valor de H em funcao do numerode valores singulares, para os mesmos nveis de
rudo. A Figura 7(b) apresenta as mesmas cur-vas num detalhe maior. As duas figuras in-dicam que a entropia aumenta a` medida queo nvel de rudo e maior, fato semelhante como que ocorre com os criterios de d, m e E.Tambem, ambas figuras sugerem que a entropiae estavel ate aproximadamente 830 valores sin-gulares, e depois apresenta uma tendencia cres-cente. Valores grandes de entropia represen-tam solucoes mais complexas, o que significaaqui solucoes com muitas flutuacoes, distantesda realidade fsica. Mais uma vez concluimosque o numero maximo de valores singulares aser utilizado na inversao deve ser em torno de830 ou 835.
A conjugacao dos criterios aplicados per-mite concluir que o numero ideal de valores sin-gulares, para este problema, e em torno de 830ou 835. Escolhendo, por exemplo, 835 valoressingulares, obtivemos o tomograma da Figura8 que indica as velocidades estimadas, no casopara = 0. Note-se a grande semelhanca entreesse resultado e a Figura 2 que mostra o tomo-grama verdadeiro. Note-se que essa abordagempoderia ser mais apurada se a escala horizon-tal fosse de maior detalhe, como por exemplo,entre 820 e 840 valores, ao inves de 800 a 900valores singulares. Alem disso, restrigindo ofaixa de valores singulares, pode-se trabalharcom tabelas de numeros e nao mais com cur-vas.
VII. CONCLUSOES
A tomografia de tempos de transito, e umaabordagem cinematica da tomografia de raios,que utiliza os tempos de transito entre fontese receptores. A tomografia e um tipo de pro-blema inverso, que pode ser resolvido, por e-xemplo, utilizando a usual tecnica da decom-posicao por valores singulares. A presenca depequenos valores singulares perturbam os re-sultados, gerando um crescimento anomalo emtodos os criterios que envolvem o modelo esti-mado, quais sejam: o erro entre os dados obser-vados e calculados, o erro entre os parametrosde modelo verdadeiros e estimados, a energia
40
-
Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007) Criterios de Selecao de Valores Singulares em ...
do modelo estimado e a entropia do modelo es-timado. Utilizando estes quatro criterios maiso comportamento do decaimento dos valoressingulares, e a derivada dos valores singulares,conclumos que, para o exemplo numerico apre-sentado, o numero otimo utilizado foi em tornode 830 ou 835 valores singulares, dentro de umconjunto de 900 valores. A utilizacao de dife-rentes nveis de rudo mostrou-se valida, tendoem vista que a metodologia se apresentou ro-busta em relacao a` adicao de rudo, e, os va-lores dos criterios foram proporcionais aos di-ferentes nveis de rudos. Os resultados foramsatisfatorios, pois os tomogramas gerados uti-lizando esta metodologia, tal qual o apresen-
tado, apresentaram-se bastante semelhantes aotomograma verdadeiro.
Agradecimentos
Os autores agradecem ao LAGEP Laborotorio de Geofsica de Exploracao dePetroleo do CPGG/UFBA pela utilizacao dosrecursos computacionais. A. Bassrei agradeceao CNPq pelo apoio aos projetos 484.239/2006-6 (Edital Universal MCT/CNPq 02/2006) e308.875/2007-9 (Bolsa de Pesquisa).
[1] A. Bassrei, A simple procedure for the selectionof singular values in acoustical travel time to-mography (abstract). J. Acoust. Soc. Am. 108,2593 (2000).
[2] E.T.F. Santos, A. Bassrei, J. Costa, Evalua-tion of L-curve and -curve approaches forthe selection of regularization parameter inanisotropic traveltime tomography. Journal ofSeismic Exploration 15, 245 (2006).
[3] E.T.F. Santos, A. Bassrei, L- and -curve ap-proaches for the selection of regularization pa-rameter in geophysical diffraction tomography.Computers & Geosciences 33, 618 (2007).
[4] W. Menke, Geophysical Data Analysis: Dis-crete Inverse Theory. Orlando: AcademicPress (1984).
[5] R. Penrose, A generalized inverse for matri-ces. Proceedings of the Cambridge Philosoph-
ical Society 51, 406 (1955).[6] C. Lanczos, Linear Differential Operators.
London: Van Nostrand (1961).[7] A.H. Anderson, A.C. Kak, Digital ray tracing
in two-dimensional refractive fields. J. Acoust.Soc. Am. 72, 1593 (1982).
[8] H.A. Schots, Tomografia Ssmica Poco-a-Pocoe Poco-a-Superfcie Utilizando Ondas Dire-tas. Dissertacao (Mestrado) Instituto deGeociencias da UFBA, Salvador (1990).
[9] R.R. Stewart Exploration Seismic Tomogra-phy: Fundamentals. Tulsa: Society of Explo-ration Geophysicists (1991).
[10] T.-w. Lo, P.L. Inderwiesen, Fundamentals ofSeismic Tomography. Geophysical MonographSeries. Tulsa: Society of Exploration Geo-physicists (1994).
41
-
Jose Nilson Pereira Silva e Amin Bassrei Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007)
FIGURA 1 Modelo hipotetico mostrando a disposicao de fontes e receptores, assimcomo os caminhos de alguns raios, que conectam fontes e receptores. As fontes,representadas por estrelas, estao dispostas no poco a` esquerda, e os receptores, repre-sentados por triangulos, estao dispostos no poco a` direita.
0
200
400
600
800
1000
1200
0 100 200 300 400 500 600 700 800 900
am
p li t u
d e v
a lo r
si n
g ul a
r
indice do valor singular
FIGURA 3 Curva de amplitude dos valores singulares versus o ndice do valorsingular. Nota-se o rapido decaimento na curva, que passa a ser um carater maissuave, se for utilizada a escala logarmica no eixo vertical.
42
-
Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007) Criterios de Selecao de Valores Singulares em ...
MODELO VERDADEIRO
150
300
450
600
750
900
dist
anci
a ve
rtica
l (m
)150 300 450 600 750 900
ditancia horizontal (m)
1700
3400
xy
2000
2500
3000
3500
FIGURA 2 Modelo utilizado para as simulacoes, com 900 blocos, sendo 30 blocospor linha horizontal e 30 blocos por linha vertical. A aquisicao de dados e do tipopoco-a-poco com 30 fontes regularmente espacados no poco a` esquerda. Igual numerode receptores, tambem regularmente espacados, no poco a` direita.
43
-
Jose Nilson Pereira Silva e Amin Bassrei Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007)
(a)
0
2e-05
4e-05
6e-05
8e-05
0.0001
800 820 840 860 880 900
am
p li t u
d e v
a lo r
si n
g ul a
r
indice do valor singular
(b)
0
2e-05
4e-05
6e-05
8e-05
0.0001
800 820 840 860 880 900
am
p li t u
d e v
a lo r
si n
g ul a
r
indice do valor singular
(c)
1e-12
1e-10
1e-08
1e-06
1e-04
0.01
800 820 840 860 880 900
d e
r i va d
a
indice do numero singular
FIGURAS 4(a), 4(b) e 4(c) Curvas restritas a` faixa de 800 a 900 valores singulares,sendo: (a) curva de amplitude de valores singulares versus o ndice do valor singular;(b) o mesmo do item (a) porem com escala logartmica no eixo vertical; (c) curva dologaritmo do modulo da derivada da amplitude de valores singulares versus o ndicedo valor singular.
44
-
Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007) Criterios de Selecao de Valores Singulares em ...
(a)
0
0.002
0.004
0.006
0.008
0.01
800 820 840 860 880 900
er r
o d
o d a
d o
numero de valores singulares
alpha=0.0alpha=0.001alpha=0.005
alpha=0.01alpha=0.05
alpha=0.1
(b)
0
0.0005
0.001
0.0015
0.002
800 820 840 860 880 900
er r
o d
o d a
d o
numero de valores singulares
alpha=0.0alpha=0.001alpha=0.005
FIGURAS 5(a) e 5(b) Curvas restritas a` faixa de 800 a 900 valores singulares, paradiferentes nveis de rudo, sendo: (a) curva do erro d dos parametros de dados versuso numero de valores singulares; (b) o mesmo do item (a) porem com detalhe na escalavertical, destacando as curvas para = 0, = 0.001 e = 0.005.
45
-
Jose Nilson Pereira Silva e Amin Bassrei Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007)
(a)
0
5e-05
0.0001
0.00015
0.0002
800 820 840 860 880 900
en
er g
i a d
o e r
r o
numero de valores singulares
alpha=0.0alpha=0.001alpha=0.005
alpha=0.01alpha=0.05
alpha=0.1
(b)
0
2e-06
4e-06
6e-06
8e-06
1e-05
800 820 840 860 880 900
en
er g
i a d
o e r
r o
numero de valores singulares
alpha=0.0alpha=0.001alpha=0.005
alpha=0.01alpha=0.05
alpha=0.1
FIGURAS 6(a) e 6(b) Curvas restritas a` faixa de 800 a 900 valores singulares,para diferentes nveis de rudo, sendo: (a) curva da energia E dos parametros demodelo versus o numero de valores singulares; (b) o mesmo do item (a) porem commenos detalhe na escala vertical. Note-se que diferente das curvas para d e m,efetuamos aqui uma reducao de escala, de modo a poder visualizar uma distincaoentre os diferentes nveis de rudo na faixa de 830 a 860 valores singulares.
46
-
Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007) Criterios de Selecao de Valores Singulares em ...
(a)
0
2
4
6
8
10
12
800 820 840 860 880 900
en
t r op i
a d
o m
o de l
o
numero de valores singulares
alpha=0.0alpha=0.001alpha=0.005
alpha=0.01alpha=0.05
alpha=0.1
(b)
2
3
4
5
6
7
8
800 820 840 860 880 900
en
t r op i
a d
o m
o de l
o
numero de valores singulares
alpha=0.0alpha=0.001alpha=0.005
alpha=0.01alpha=0.05alpha=0.1
FIGURAS 7(a) e 7(b) Curvas restritas a` faixa de 800 a 900 valores singulares, paradiferentes nveis de rudo, sendo: (a) curva da entropia H dos parametros de modeloversus o numero de valores singulares; (b) o mesmo do item (a) porem com detalhena escala vertical.
47
-
Jose Nilson Pereira Silva e Amin Bassrei Sitientibus Serie Cie^ncias Fsicas 03: 32-48 (2007)
MODELO RECUPERADO
150
300
450
600
750
900
dist
anci
a ve
rtica
l (m
)
150 300 450 600 750 900ditancia horizontal (m)
1681.33
3436.36
x
y
2000
2500
3000
3500
FIGURA 8 Modelo estimado utilizando 835 valores singulares, com dados livre derudo ( = 0).
48
-
Computers & Geosciences 33
rl
sa,
Fede
nd G
lvado
orm
Keywords: Inverse problems; Diffraction tomography; Regularization; Regularization parameter; L-curve; Y-curve
Reiter and Rodi, 1996; Rocha Filho et al., 1996,1997). The main advantages of the matrix for-
ARTICLE IN PRESS
Corresponding author. Tel.: +55 71 3203 8508;fax: +5571 3203 8501.mulation are: (1) the option of having irregularspacing (i) between sources, (ii) between receivers
0098-3004/$ - see front matter r 2006 Elsevier Ltd. All rights reserved.
doi:10.1016/j.cageo.2006.08.013
E-mail addresses: [email protected] (E.T.F. Santos),
[email protected] (A. Bassrei).1. Introduction
The main purpose of exploration geophysics forhydrocarbons is to provide trustworthy images ofthe subsurface, which can indicate potential hydro-carbon reservoirs. Exploration seismology, betterknown as seismics, is the area of applied geophysicsmost employed for the subsurface imaging inhydrocarbons reservoirs. And within seismics,
tomography is incorporated as a suitable methodof data inversion. In this work, we use geophysicaldiffraction tomography where the input data is thescattered acoustic eld measured at the receivers,and the velocity of the 2-D medium is the inversionoutput. Instead of using the classical approach ofdiffraction tomography in geophysics, i.e., theFourier projection theorem (Devaney, 1984; Slaneyet al., 1984; Wu and Toksoz, 1987), we use a matrixformulation approach (Thompson et al., 1994;Abstract
Since inverse problems are usually ill-posed it is necessary to use some method to reduce their deciencies. The method
that we choose is the regularization by derivative matrices. When a rst derivative matrix is used the order is called the rst.
Then, second-order regularization is when the matrix is formed by second-order differences, and order zero means that the
regularization matrix is the identity. There is a crucial problem in regularization, which is the selection of the regularization
parameter l. We used the L-curve as a tool for the selection of l, and we propose a new extension, which we call the Y-curve. The tool was applied in geophysical diffraction tomography in two acquisition geometries: cross-hole and vertical
seismic prole (VSP), where the goal is to obtain the 2-D velocity distribution from the measured values of the scattered
acoustic eld. We present several simulation results with synthetic data, for the three regularization orders mentioned
above. We validate the necessity of some kind of regularization, as well as the feasibility of both parameter selection
approaches.
r 2006 Elsevier Ltd. All rights reserved.L- and Y-curve approaches foparameter in geophysica
E.T.F. SantoaCEFET/BA and Institute of Geosciences
bInstitute of Physics & Research Center in Geophysics a
40001-970 Sa
Received 2 May 2006; received in revised f(2007) 618629
the selection of regularizationdiffraction tomography
A. Bassreib,
ral University of Bahia, Salvador, Brazil
eology Federal University of Bahia, Caixa Postal 1001,
r BA, Brazil
10 August 2006; accepted 27 August 2006
www.elsevier.com/locate/cageo
-
Soupios et al. (2001, 2003), Castellanos et al. (2002)and McCarthy (2003).
ARTICLE IN PRESSE.T.F. Santos, A. Bassrei / Computers & Geosciences 33 (2007) 618629 619and (iii) between sources and receivers (all verycommon in practical situations with real data); and(2) the possibility to study, in a better way, the ill-posedness of the inverse problem. The maindisadvantage is the cost in terms of computationtime. For forward modeling, we compute thescattered acoustic eld from a given 2-D velocitydistribution. The eld is obtained by a second-ordernite difference scheme and the tomographic matrixby a rst-order Born approximation. One commonway to calculate the inverse matrix is by thegeneralized inverse through singular value decom-position (SVD).Since geophysical diffraction tomography is an
ill-posed inverse problem, it is necessary to use sometool to reduce this deciency. The tool that wechoose is the regularization of the inverse problemby derivative matrices, known in the literature byseveral names, (e.g. the Tikhonov regularization).This tool has an important input parameter calledthe regularization parameter l.In the last 10 years researchers have studied the
problem of nding the optimum value of l ingeophysical applications. One of rst works wasdone by Ray and Sanchez (1994), who usedregularization and the L-curve to raw tidal estimatesbased on Geosat altimeter data. The estimation isbased on tting specic functions called Proudmanfunctions as a spatial basis, which is formulated as alinear system. The tting coefcients are obtainedsolving the corresponding least-squares problemusing zero-order regularization. Then, L-curve isapplied to obtain the optimal regularization para-meter. Yao and Roberts (1999), presented analgorithm for the practical choice of the regulariza-tion parameter in linear seismic tomographic inver-sion. Two criteria for the choice of the regulari-zation parameter were investigated. The rstapproach assumes that the norm of the errors inobserved data is known accurately and searches theregularization parameter associated with this errorusing Newtons method. The second approach is theapplication of the generalized cross-validation(GCV), which chooses the regularization parameterassociated with the best average prediction for allpossible omissions of one datum, corresponding tothe minimum of the GCV function. More recently,Farquharson and Oldenburg (2004) compared twoautomatic ways of estimating the best regularizationparameter to non-linear inverse problems: the GCVand L-curve. These criteria initially proposed
for linear problems are applied to each iterationIn the present work, to our knowledge the rstone in geophysical diffraction tomography usingregularization with search for the optimum para-meter, we employ the L-curve and an extension of it,which we call the Y-curve, in cross-hole and verticalseismic prole (VSP) geophysical diffraction tomo-graphy. In the L-curve the x-axis represents theerror between the observed data and the calculatedone, and the y-axis represents the amount ofregularization of the solution. The L-curve wasreintroduced in the literature of inverse problems byHansen (1992, 1998) and he also produced atoolbox (Hansen, 1992). Hansens book (1998) is avery good source of information for a more rigoroustreatment of the L-curve.
2. Regularization, L- and H-curve
Consider a modeling process where the input of asystem is described by certain parameters containedin m and the output is described as Am( d) whichis a linear transformation on m. If the vector ddescribes the observed output of the system, theproblem is to choose the parameters m in order tominimize in some sense, the difference between theobserved d and the prescribed output of the systemAm. If we measure this difference through the normJdJ, our task is to nd the value of m that minimizesJAmdJ2, where the MN matrix A and the datavector d with M elements are provided. This iscalled a least-squares problem, which can beformally stated as follows. Considering the basicof linearized inverse problems, in a typical itera-tive process to obtain the linearized solution tothe corresponding non-linear problem. Thus,the best l is estimated for each linearized iteration.To ensure that the regularization parameter de-creases along iterations, an attenuation factor ismultiplied by the regularization parameter at thelast iteration to limit the next maximum allowableparameter.Some other relevant works that consider the
aspect of parameter selection, either generally, or ingeophysical applications are Hansen (1992, 1998),Bouman and Sauer (1993), Hansen and OLeary(1993), Hanke (1996), Hanke and Raus (1996),Reginska (1996), Vogel (1996), Belge et al. (2002),Calvetti et al. (1999), Kilmer and OLeary (2001),relationship d Am, we wish to minimize the error
-
and
D2
1 2 1 0 0 0 0 . . . 00 1 2 1 0 0 0 . . . 0... . .
.. . .
0 . . . 0 0 0 1 2 1 00 . . . 0 0 0 0 1 2 1
0BBBBBB@
1CCCCCCA.
(6)
The L-curve knee (Fig. 1) represents a trade-offbetween smoother solutions with higher errors androugher solutions with smaller errors. Thus, theknee detection at the L-curve is an heuristiccriterion to select the most appropriate solution.Solutions near to the curve knee are also acceptable.
ARTICLE IN PRESSE.T.F. Santos, A. Bassrei / Computers & Geosciences 33 (2007) 618629620using the following objective function:
Fm d AmT d Am. (1)The estimated solution, also called least-squares
solution, is
mest ATA1ATd. (2)Least-squares solutions very often do not provide
good results and sometimes they do not even exist.In order to solve this problem we use a tool ofregularization or smoothing: the ill-conditioning ofthe matrix A is regularized and the unstable least-squares estimate mest is consequently smoothed togreatly reduce the possibility of wild noise-induceductuation in d, hopefully without distorting theresulting smoothed image too far from the true m(Titterington, 1985).The concept of regularization was introduced by
Tikhonov in 1963 in order to improve the quality ofthe inversion. This theory was studied by manyresearchers, and we use the Twomey (1963)approach. See Bassrei and Rodi (1993) about thenames and history in regularization theory. Con-sider the following objective function:
Fm lDlmTDlm eTe, (3)where l is the regularization parameter and Dl is thelth-order derivative matrix. If qF(m)/qm 0, thenthe estimated model is given by
mest ATA lDTl Dl1ATd. (4)Notice that if l 0 we obtain the standard
least squares, and the least squares is said to bedamped if D0
TD0 I. If D is the rst der-ivative matrix then the regularization is calledto be rst order and so on. Each 2D model isscanned line by line to be represented by a singlevector, i.e., rasterized. It simplies the form of thediscrete derivative approximation matrix, whichresembles a regular pattern. Thus, the matrices D1and D2 may be schematized by the followingtemplates:
D1
1 1 0 0 0 0 0 . . . 00 1 1 0 0 0 0 . . . 0... ..
. . .. ..
.. . .
0 . . . 0 0 0 0 1 1 00 . . . 0 0 0 0 0 1 1
0BBBBBB@
1CCCCCCA
(5)Thus, one can achieve a solution that simulta-neously satises the criteria of error minimization,smoothness and also with physical meaning.The detection of the L-curve corner was per-
formed using Hansens toolbox. A number ofdifferent denitions have been proposed for thebest estimation of the L-curve corner (Calvetti et al.,2002; Belge et al., 2002; Kilmer and OLeary, 2001;Hansen, 1992, 1998).Considering this curve approximately L-shaped,
one can nd its knee searching the maximumcurvature point (Hansen, 1992; Hansen andOLeary, 1993). Although, secondary inexionsmay occur, which may result in the wrong detectionof the best regularization parameter. Thus, theautomatic method of knee detection adopted in thistoolbox may lead sometimes to inadequate regular-ization parameters. Due to this problem, sometimes
||e||2
||Dlm||2
1
2
34 5
L-curve's knee
(best )
Smoother solution
Sm
alle
r err
orFig. 1. Schematic representation of L-curve.
-
it is necessary to select the best regularizationparameter by visual inspection of the L-curve anda manual detection of its knee. Belge et al. (2002)adopted the point closest to the origin of L-curvegraph as an estimation of the L-curve corner. Itworks ne when the curve is clearly L-shaped, but itmay fail when the inexion at knee signicantlydiffers from a straight angle because other pointsoutside knee may be closer to the origin.Thus, a criterion that identies the L-curve corner
should be exible enough to tolerate certaindeviations from its ideal L-shape and still correctlyidenties correctly its corner. We adopted adifferent criterion based on a curve representingthe cosine of angles between adjacent segments ofL-curve discrete representation, which we namedY-curve. Where the curve is locally straight, the angletends to zero, leading the cosine of this angle to one.Near the L-curve knee, the angle tends to be greater
ARTICLE IN PRESSE.T.F. Santos, A. Bassrei / Computers & Geosciences 33 (2007) 618629 621than its neighbors, leading the cosine to values lessthan one. Thus, smaller cosine values are associatedwith inexions of the curve, which lead us to inspectthe minima of the Y-curve to nd the knee of the L-curve and consequently the best regularizationparameter (Fig. 2). The method developed to selectthe best regularization parameter is based on thedetection of the rst local minimum of the Y-curve.This minimum is automatically detected where therst derivative is close to zero and the secondderivative is positive, adopting thresholds due tothe discretization and arithmetic computer precision.Thus, the rst occurrence of minimum at Y-curve is
||Dlm||2
||e||2
1
2
3 4 5
30
290
10Fig. 2. Schematic representation for the construction of Y-curve.associated with the knee of L-curve, giving usthe best regularization parameter. Further ine-xions of the L-curve were discarded because onlythe rst local minimum of Y-curve is associated withL-curve knee. This avoids the wrong regularizationparameter detection described before, when oneadopts the criterion of maximum curvature of theL-curve.
3. Diffraction tomography modeling via Bornapproximation
The wave equation is given by
r2Ur; t 1c2r
q2Ur; tqt2
, (7)
where U(r, t) is the solution, either displacement orpressure, and c(r) is the acoustic velocity of themedium. Considering that the solution can bewritten as U(r,o,t) eiotP(r,o), which representsa harmonic dependence with time, we obtain theHelmholtz equation:
r2 k2Pr;o 0, (8)where the two-dimensional (2-D) wavenumber is
given by k kr;o k2x k2y
q. The conditions
for the imaging are that the medium is acoustic and2-D, and the propagation of the incident eld iswithin a limited area A(r0), the background,with constant velocity c0. The object function isdened as
Or 1 c20
c2r (9)
and represents the perturbation of the velocity ineach point in relation to c0. Redening thewavenumber as function of O(r), and substitutingit in the Helmholtz equation, we obtain
r2 k2PS k20OrPO PS, (10)where PO is the incident eld and PS is the scatteredeld. The last differential equation has the followingintegral solution, known as LippmannSchwingerequation (Lo and Inderwiesen, 1994):
PSr k20ZAr0
Or0Grjr0POr0 PSr0dr0.
(11)
In the inverse scattering procedure, we considerthe knowledge of the scattered eld, so that the
object function is the unknown function, and the
-
ARTICLE IN PRESS
lbest crms (%)
0.0008 0.0742
0.0666 0.0572
0.0006 0.0687
0.0769 0.0520
0.0003 0.0703
0.0514 0.0505
0.0568
0.0060 0.6895
0.0045 0.7750
0.0111 0.5175
0.0061 0.5506
0.0041 0.5331
0.0038 0.5385
2.6842
0.1234 0.5130
0.1322 0.5107
0.1599 0.5125
0.3035 0.4823
E.T.F. Santos, A. Bassrei / Computers & Geosciences 33 (2007) 618629622Table 1
lbest and crms (%) of all simulations
Model Method
Example 1diffractor point cross-hole Order 0: L-curve
Order 0: Y-curveOrder 1: L-curve
Order 1: Y-curveOrder 2: L-curve
Order 2: Y-curveLeast squares
Example 2plus pod cross-hole Order 0: L-curve
Order 0: Y-curveOrder 1: L-curve
Order 1: Y-curveOrder 2: L-curve
Order 2: Y-curveLeast squares
Example 3reef cross-hole Order 0: L-curve
Order 0: Y-curveOrder 1: L-curve
Order 1: Y-curveintegral solution becomes an integral equation. Theabove equation is non-linear and the linearization isachieved, for example, via the rst-order Bornapproximation, which is only valid for the weakscattering of the incident eld. The total eld isPT(r) PO(r)+PS(r) and PS(r)5PO(r), so that wehave PT(r) PO(r). Thus we obtain a linear relationbetween O(r) and PS(r):
PSr k20ZAr0
Or0Grjr0POr0dr0. (12)
We represent the incident eld by a source in rSthrough the Greens function:
POr0 Gr0jrS (13)and the scattered eld in A(r) is registered by areceptor in rG:
PSrS; rG k20ZAr0
Or0Gr0jrSGrGjr0dr0.
(14)
Order 2: L-curve
Order 2: Y-curveLeast squares
Example 4reef VSP Order 0: L-curve
Order 0: Y-curveOrder 1: L-curve
Order 1: Y-curveOrder 2: L-curve
Order 2: Y-curveLeast squaresThe discretization of the above relation leads tothe linear relation d Am, which has to be invertedin order to recover O(r). In this work the inversion is
0
5
10
15 05
10
15
3000
3100
3200
3300
horizon
tal distan
ce (cells
)
vertical distance (cells)
velo
city (
m/s
)
Fig. 3. Example 2plus pod model. 3-D representation of the
true model.
0.2449 0.5309
0.4784 0.4856
0.5260
0.2139 0.5953
0.2256 0.5938
0.2783 0.5494
0.2971 0.5456
0.8463 0.5278
0.5867 0.5423
0.6076
-
done using SVD with regularization, which wedescribed earlier.
4. Numerical simulation
We explore these two approaches for the selectionof the regularization parameter in four sy