
Realimentação de estado - fem.unicamp.brem621/aulas/aula22/realimentacao_estado_sai… ·...
43
Controle de Sistemas Mecânicos l Introdução l Realimentação de estado l Realimentação de saída Realimentação de estado
Transcript of Realimentação de estado - fem.unicamp.brem621/aulas/aula22/realimentacao_estado_sai… ·...
Controle de Sistemas Mecânicos
� Introdução� Realimentação de estado
� Realimentação de saída
Realimentação de estado

Controle de Sistemas Mecânicos
Introdução
A realimentação de estado envolve� Medição de todo o vetor de estado� Multiplicação pelo vetor de ganhos� Arbitrar as raízes do denominador� Escalamento do numerador
Controle de Sistemas Mecânicos
Estratégia de controle
determinar o vetor deganhos que satisfaça as
especificações desejadasde cada sistema
Estratégia decontrole
corresponde a uma alteração dospólos do sistema para novasposições no plano complexo
Controle de Sistemas Mecânicos
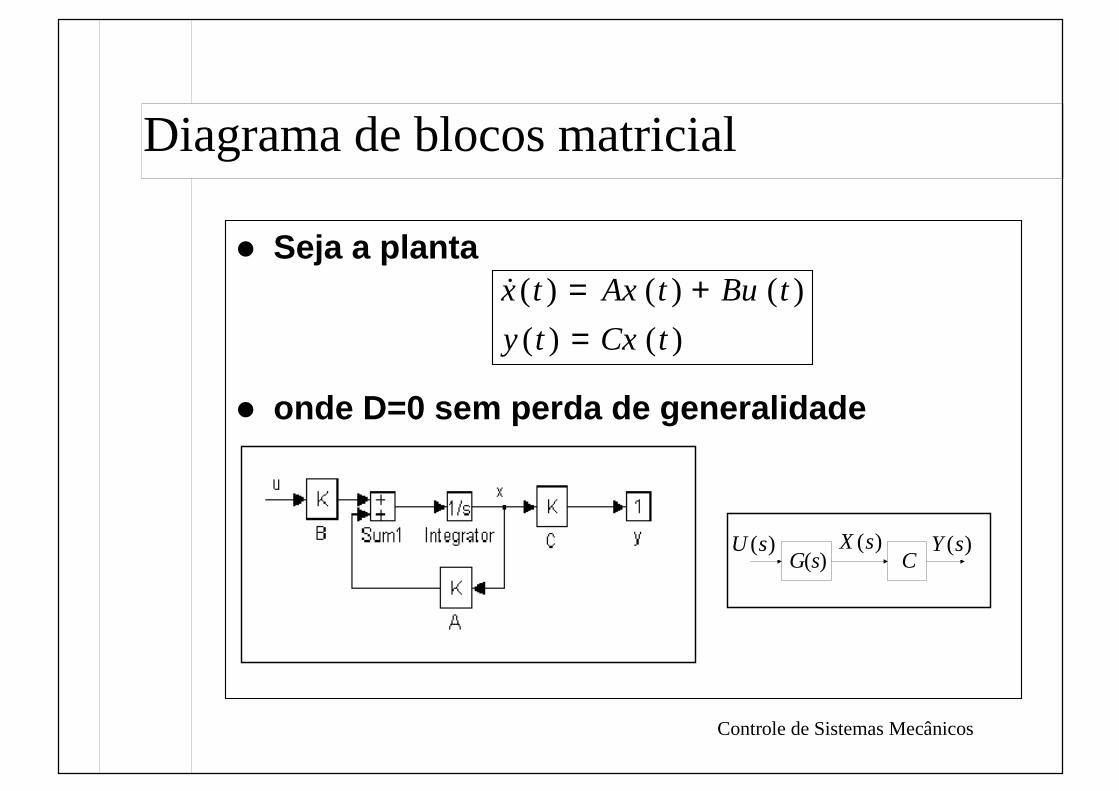
Diagrama de blocos matricial
� Seja a planta
� onde D=0 sem perda de generalidade
)()(
)()()(
tCxty
tButAxtx
=+=�
C)(sG)(sU )(sY)(sX
Controle de Sistemas Mecânicos
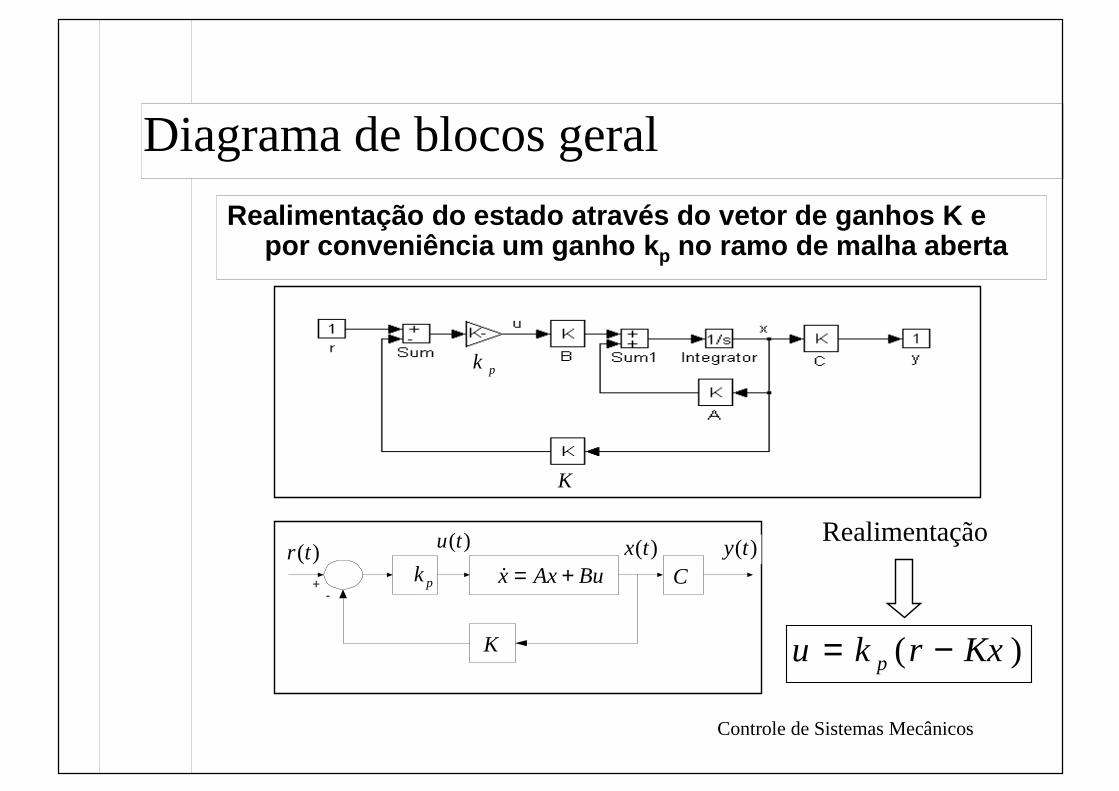
Diagrama de blocos geral
Realimentação do estado através do vetor de ganhos K epor conveniência um ganho kp no ramo de malha aberta
)( Kxrku p −=
pk
Realimentação
K
-+
K
BuAxx +=�)(ty)(tr
pk)(tx
C
( )u t
Controle de Sistemas Mecânicos
Matematicamente
� substituindo a realimentação na planta
)()(
)()()(
tCxty
tButAxtx
=+=�
BrkxBKkAx
KxrBkAxx
pp
p
+−=
−+=
)(
)(
�
�
)( Kxrku p −= +
Controle de Sistemas Mecânicos
Modelo do sistema
� Definindo as novas matrizes
� obtém-se o seguinte modelo de estadoem malha fechada
kA
Cxy
rBxAx kk
=+=�
BrkxBKkAx pp +−= )(�
kB
Controle de Sistemas Mecânicos
Função de transferência
� Lembrando: Obtém-se a função detransferência a partir do modelo de estadousando a fórmula
DBAsICsR
sYkk +−= −1)(
)(
)(
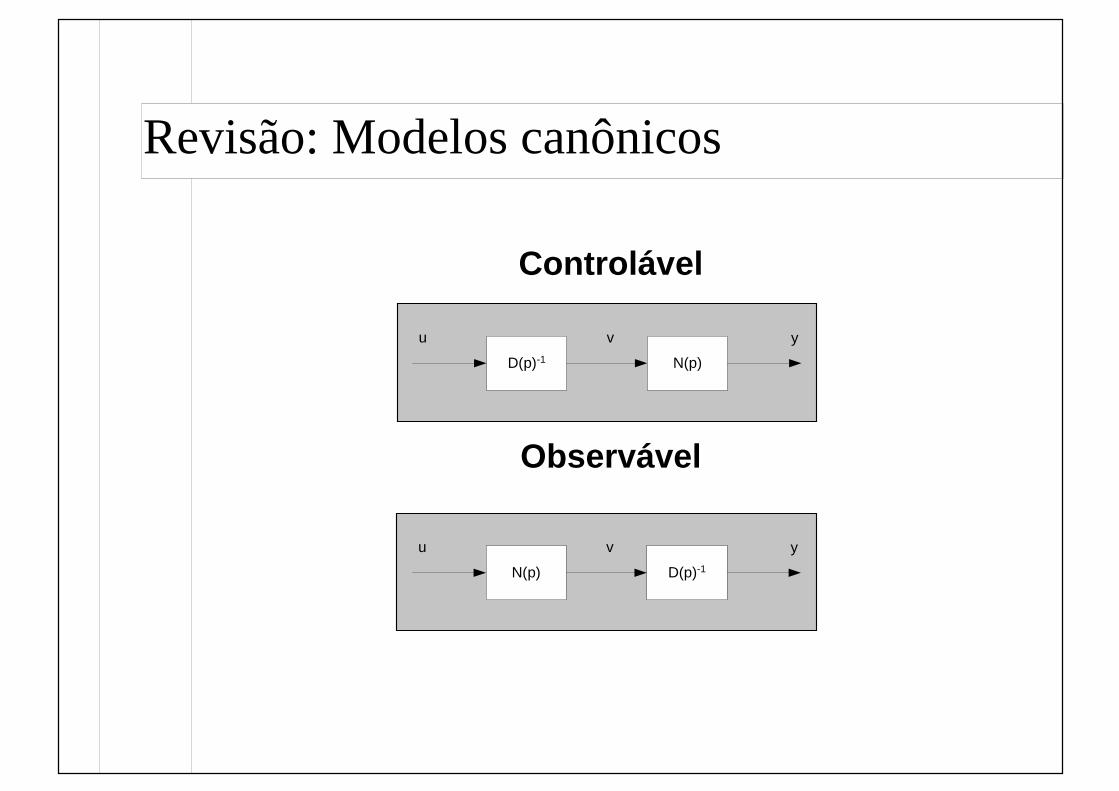
Revisão: Modelos canônicos
Controlável
Observável
N(p)D(p)-1
vu y
D(p)-1N(p)
vu y
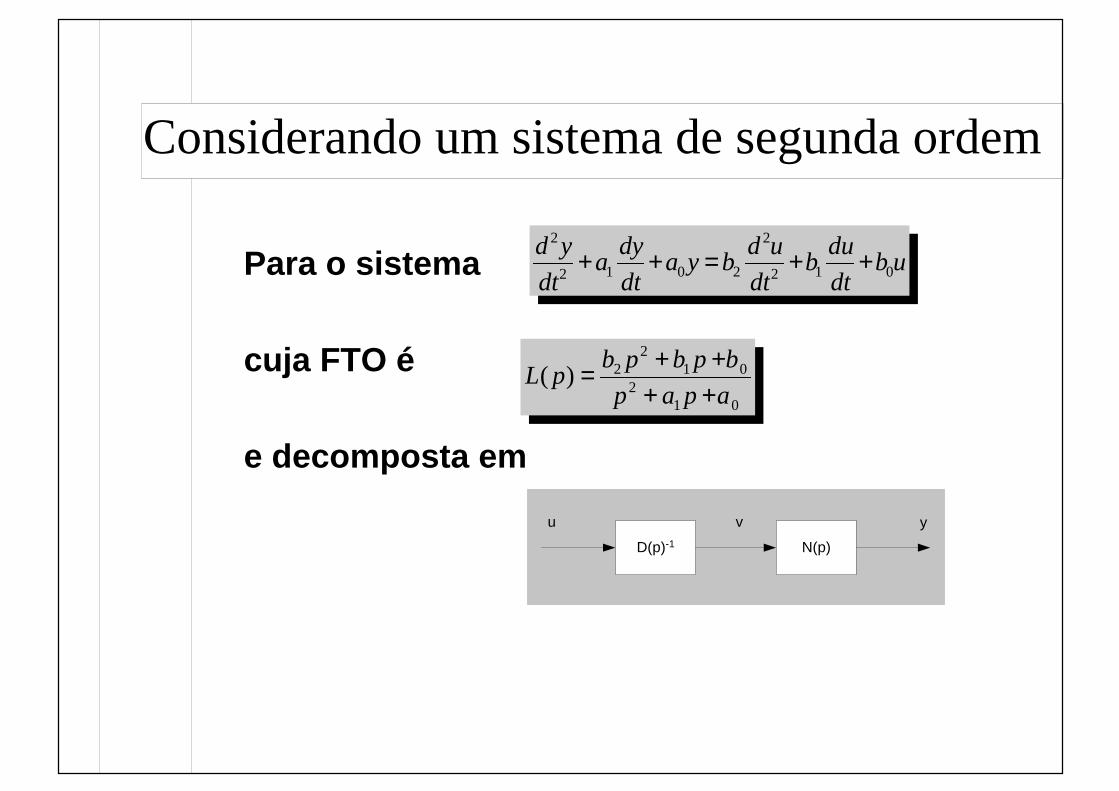
Considerando um sistema de segunda ordem
Para o sistema
cuja FTO é
e decomposta em
N(p)D(p)-1
vu y
ubdt
dub
dt
udbya
dt
dya
dt
yd012
2
2012
2
++=++
012
012
2)(apap
bpbpbpL
++++=
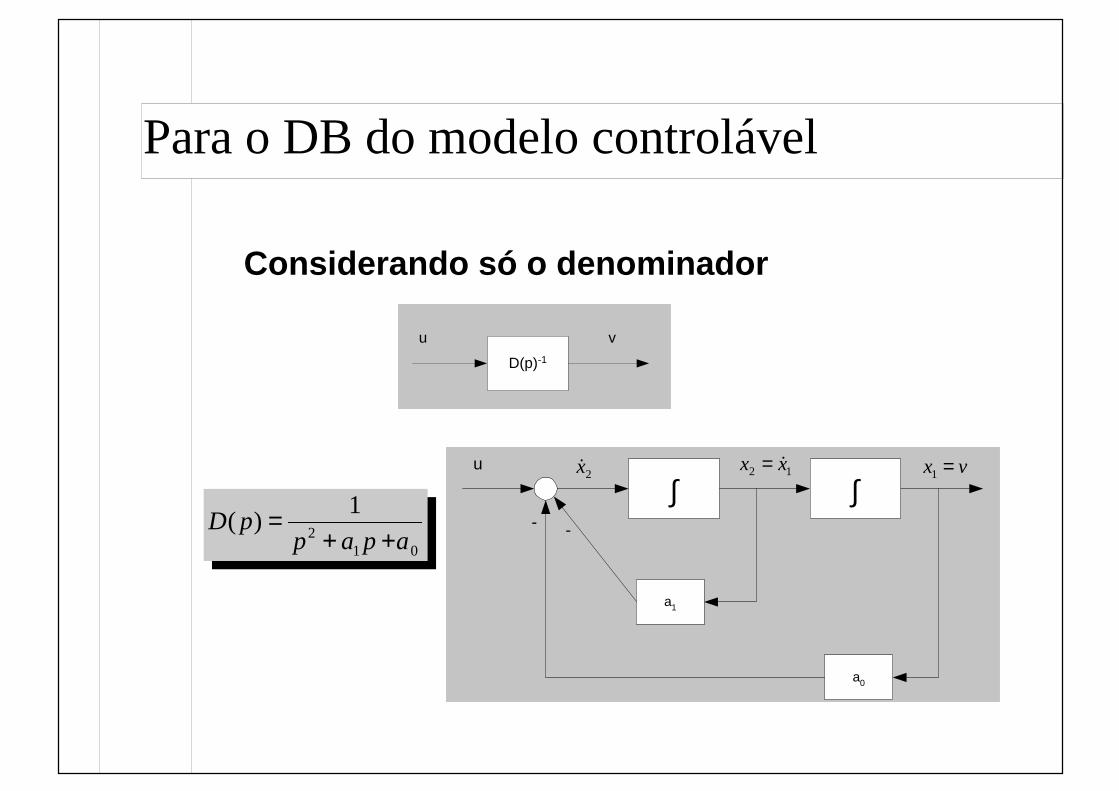
Para o DB do modelo controlável
Considerando só o denominador
012
1)(
apappD
++=
u
-
∫ ∫
a1
a0
-
12 xx �=2x� vx =1
D(p)-1
vu

Ou ainda
Considerando apenas o numerador
v y0b
dt
db1
2
2
2 dt
db
012
2)( bpbpbpN ++=
N(p)
v y
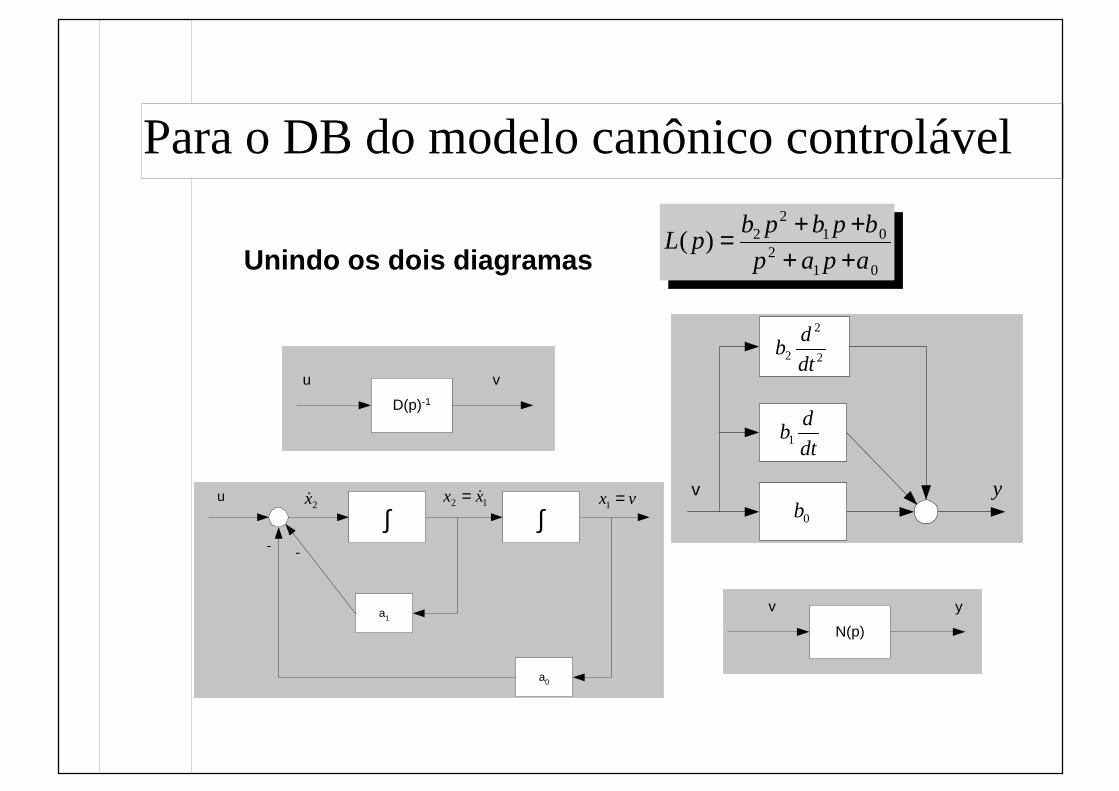
Para o DB do modelo canônico controlável
Unindo os dois diagramas
v y0b
dt
db1
2
2
2 dt
db
u
-
∫ ∫
a1
a0
-
12 xx �=2x� vx =1
012
012
2)(apap
bpbpbpL
++++=
N(p)
v y
D(p)-1
vu
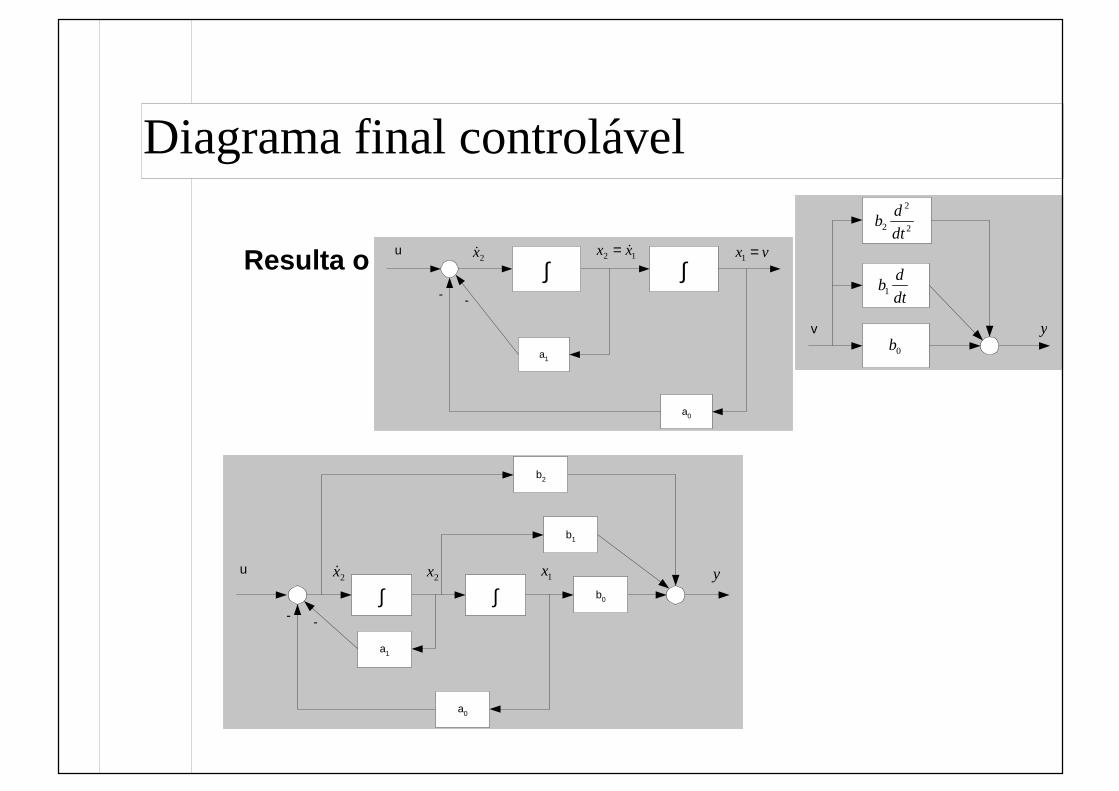
Diagrama final controlável
Resulta o DB
u
-∫ ∫
a1
a0
-
2x2x� 1x yb0
b1
b2
v y0b
dt
db1
2
2
2 dt
db
u
-
∫ ∫
a1
a0
-
12 xx �=2x� vx =1
Controle de Sistemas Mecânicos
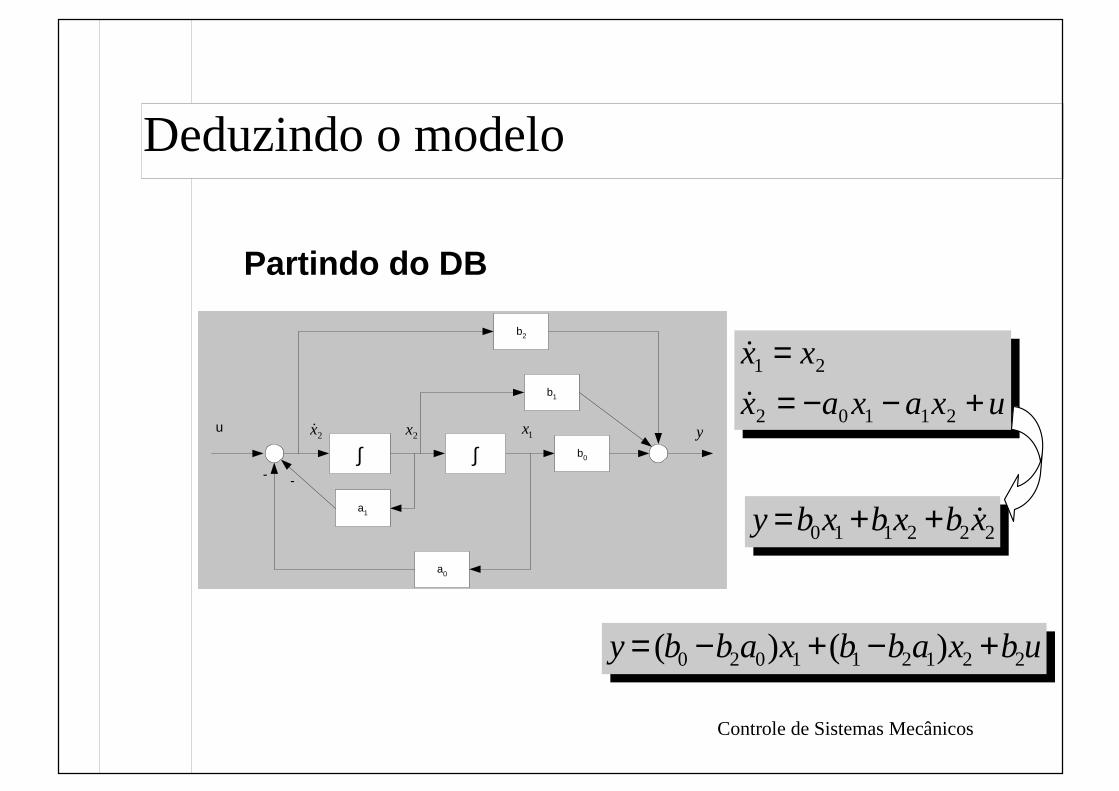
Deduzindo o modelo
Partindo do DB
uxaxax
xx
+−−==
21102
21
�
�
222110 xbxbxby �++=
u
-∫ ∫
a1
a0
-
2x2x� 1x yb0
b1
b2
ubxabbxabby 221211020 )()( +−+−=
Controle de Sistemas Mecânicos
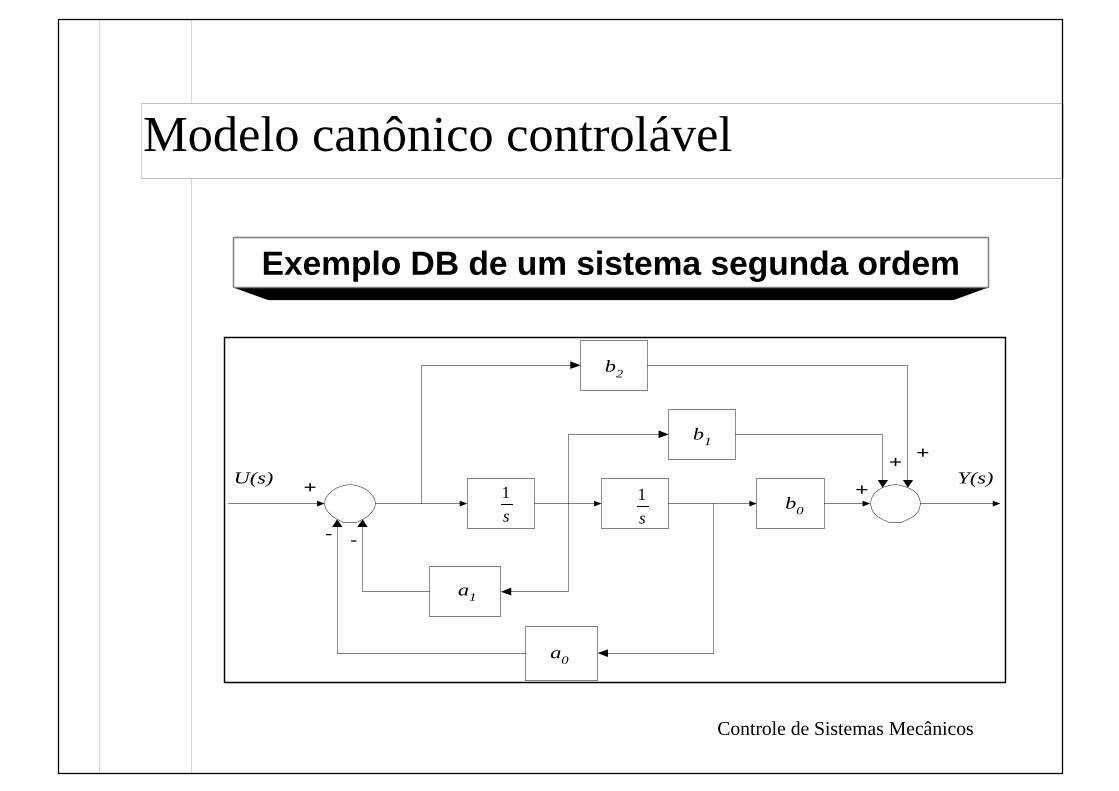
Modelo canônico controlável
Exemplo DB de um sistema segunda ordem
1
s1
s
a0
Y(s)
a1
+
-
U(s)
b0
b1
b2
+
-
+
+
Controle de Sistemas Mecânicos
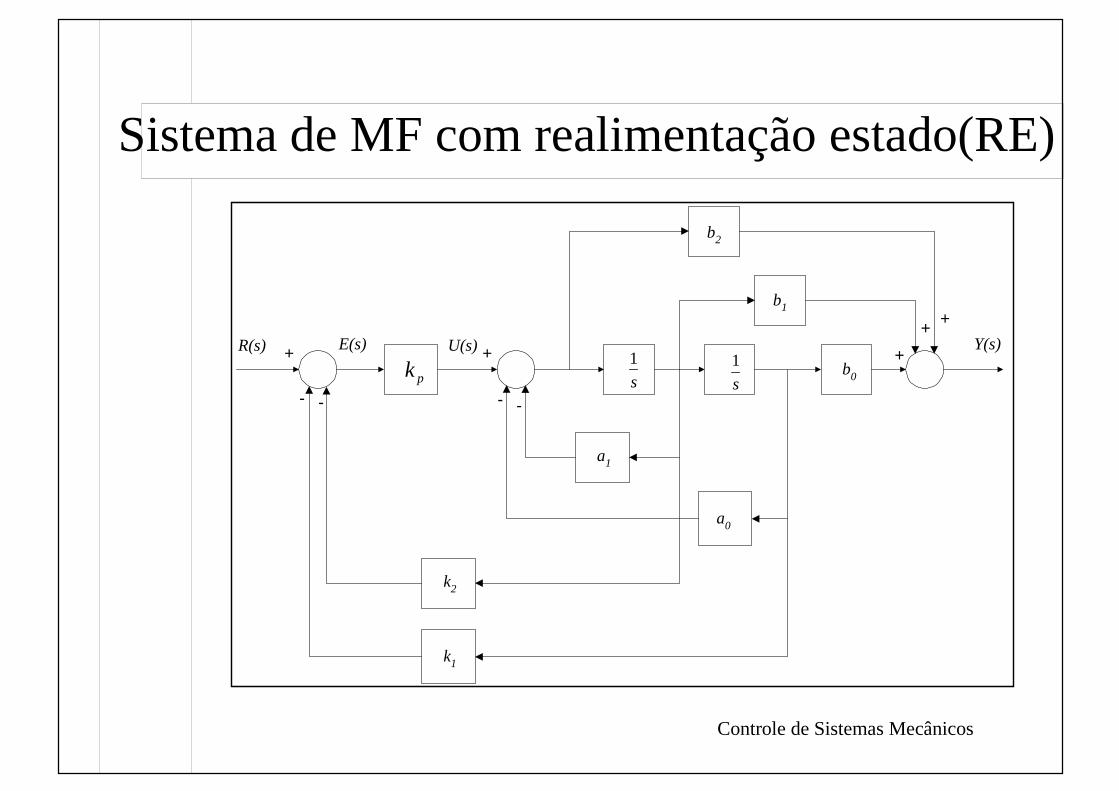
Sistema de MF com realimentação estado(RE)
1
s1
s
a0
Y(s)
a1
+
-
U(s)
b0
b1
b2
+
-
+
+
k1
k2
-
R(s)
-
+k2
E(s)
pk
Controle de Sistemas Mecânicos
1
s1
s
a0
Y(s)
a1
+
-
U(s)
b0
b1
b2
+
-
+
+
k1
k2
-
R(s)
-
+k2
E(s)
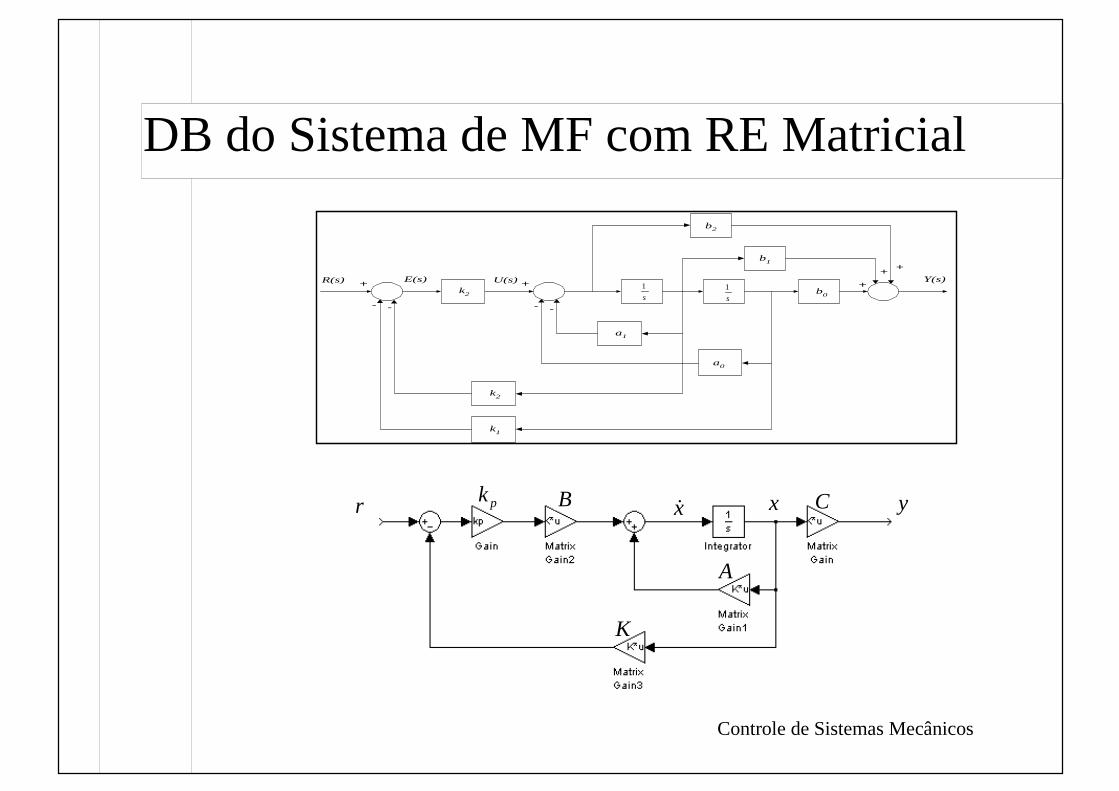
DB do Sistema de MF com RE Matricial
B
A
K
Cx yr pkx�
Controle de Sistemas Mecânicos
Realimentação de saída
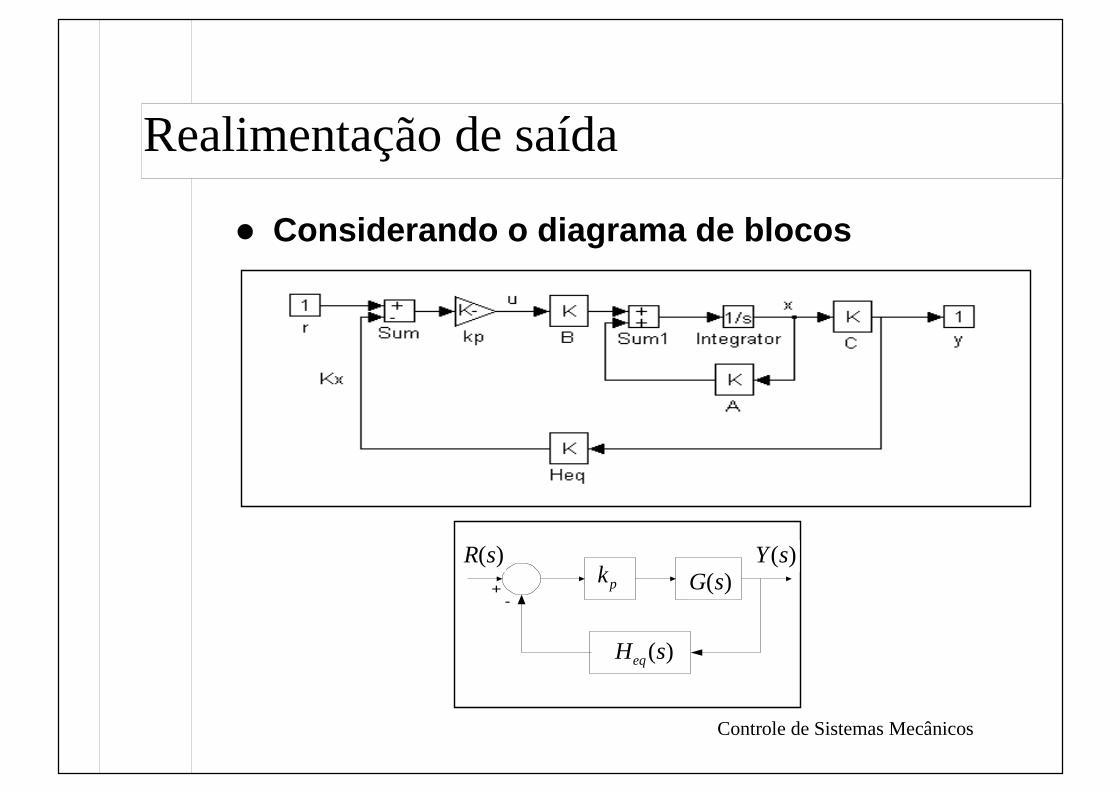
� Considerando o diagrama de blocos
-+
)(sHeq
)(sG)(sY)(sR
pk
Controle de Sistemas Mecânicos
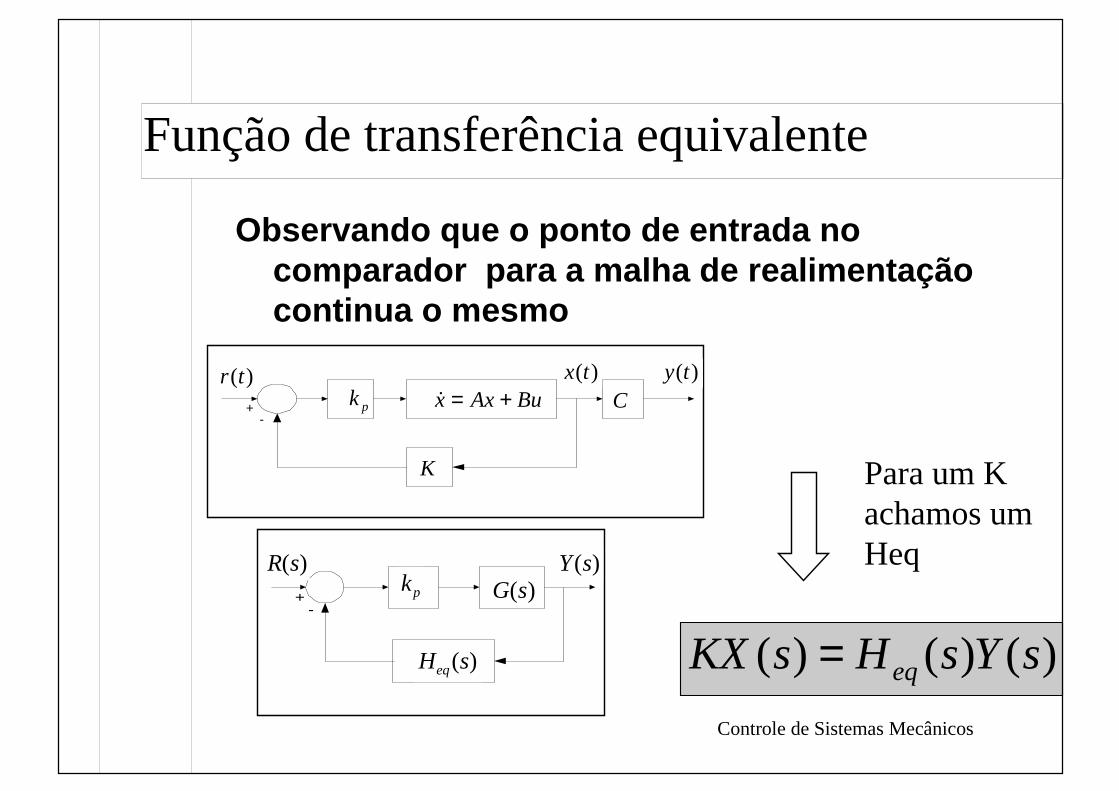
Função de transferência equivalente
Observando que o ponto de entrada nocomparador para a malha de realimentaçãocontinua o mesmo
)()()( sYsHsKX eq=-
+
)(sHeq
)(sG)(sY)(sR
pk
-+
K
BuAxx +=�)(ty)(tr
pk)(tx
C
Para um Kachamos umHeq
Controle de Sistemas Mecânicos
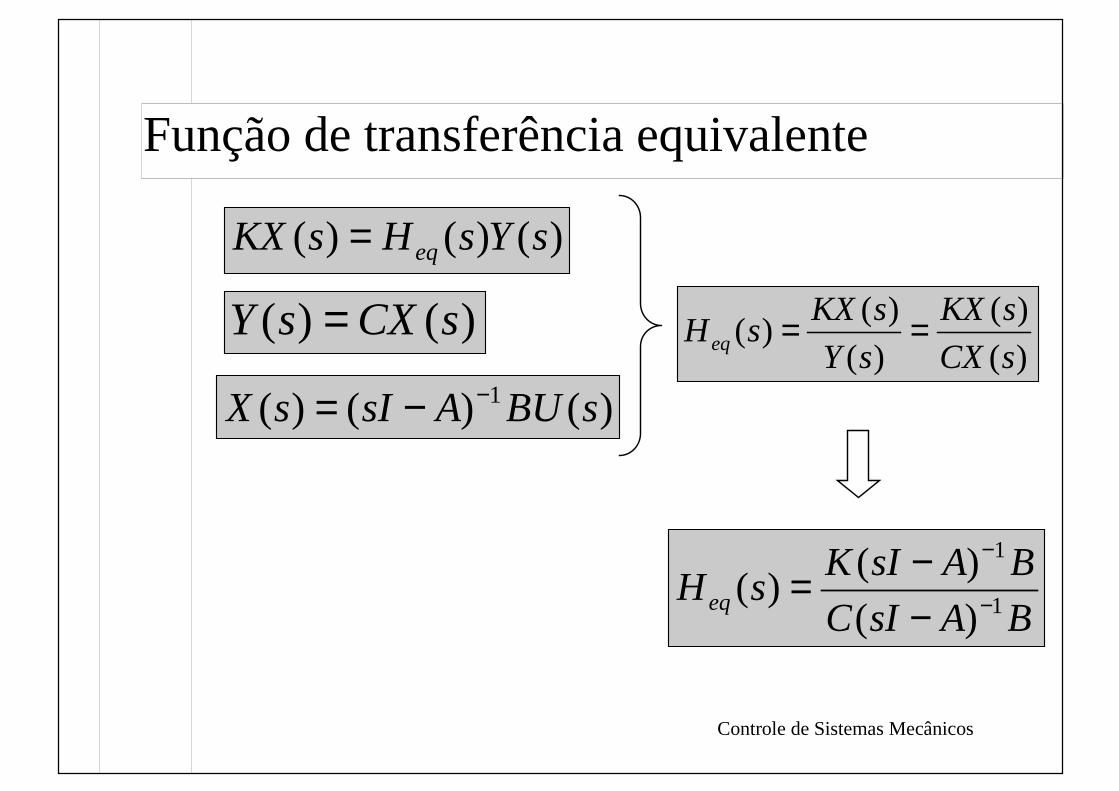
Função de transferência equivalente
)()()( sYsHsKX eq=
BAsIC
BAsIKsHeq 1
1
)(
)()( −
−
−−=
)()( sCXsY =
)()()( 1 sBUAsIsX −−=)(
)(
)(
)()(
sCX
sKX
sY
sKXsHeq ==
Controle de Sistemas Mecânicos
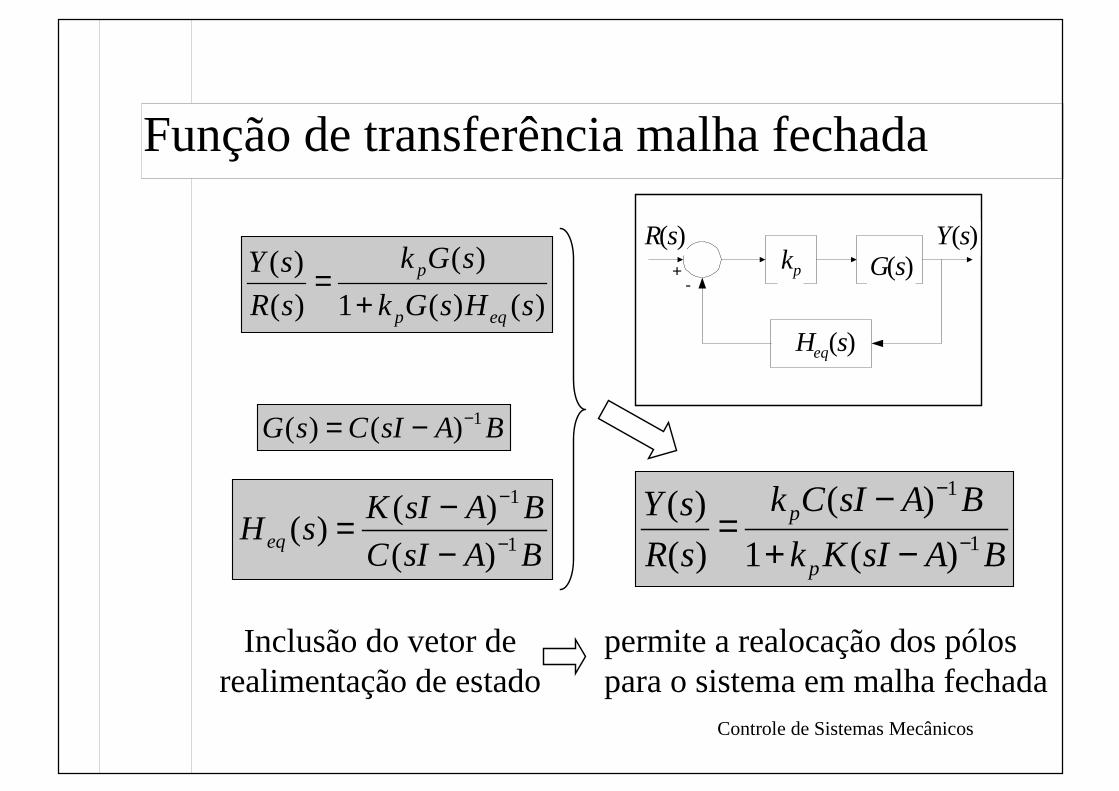
Função de transferência malha fechada
BAsIKk
BAsICk
sR
sY
p
p
1
1
)(1
)(
)(
)(−
−
−+−
=
)()(1
)(
)(
)(
sHsGk
sGk
sR
sY
eqp
p
+= -
+
)(sHeq
)(sG)(sY)(sR
pk
1( ) ( )G s C sI A B−= −
BAsIC
BAsIKsHeq 1
1
)(
)()( −
−
−−=
permite a realocação dos pólospara o sistema em malha fechada
Inclusão do vetor derealimentação de estado
Controle de Sistemas Mecânicos
Exemplo22.1: Realimentação de estado
Para a planta cuja FT é
deseja-se que o sistema em malha fechada tenhapólos –1 e –2 utilizando a realimentação dasvariáveis de estado. Determinar o vetor de ganhosrespectivo.
1
52)(
2 ++=
s
ssG

Controle de Sistemas Mecânicos
Exp22.1: DB apartir FT
1
52)(
2 ++=
s
ssG 2 5y y u u+ = +�� �
N1/D
u yx
upNypD )()( =
x x u+ =��
2 5y x x= +�xpNy )(=
uxpD =)(
Controle de Sistemas Mecânicos
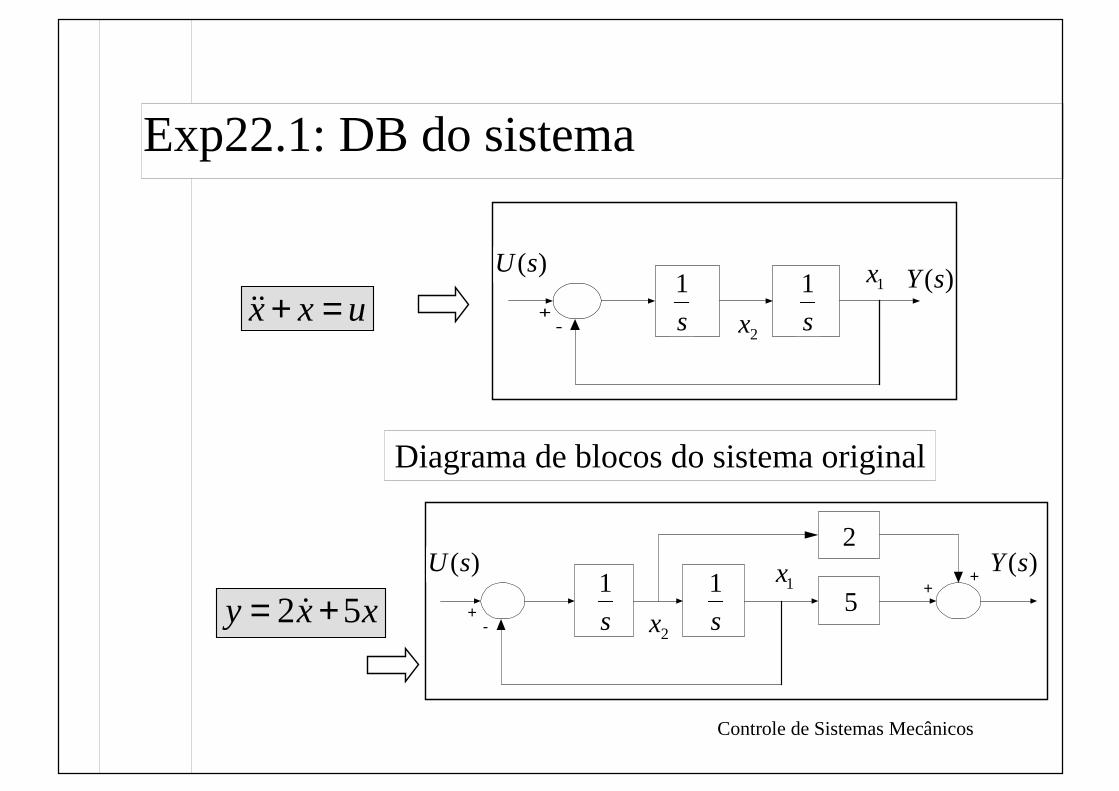
Exp22.1: DB do sistema
Diagrama de blocos do sistema original
-+
++
5
)(sY)(sU2
s
1
s
1
2x
1x
-+
)(sY)(sU
s
1
s
1
2x
1x
x x u+ =��
2 5y x x= +�
Controle de Sistemas Mecânicos
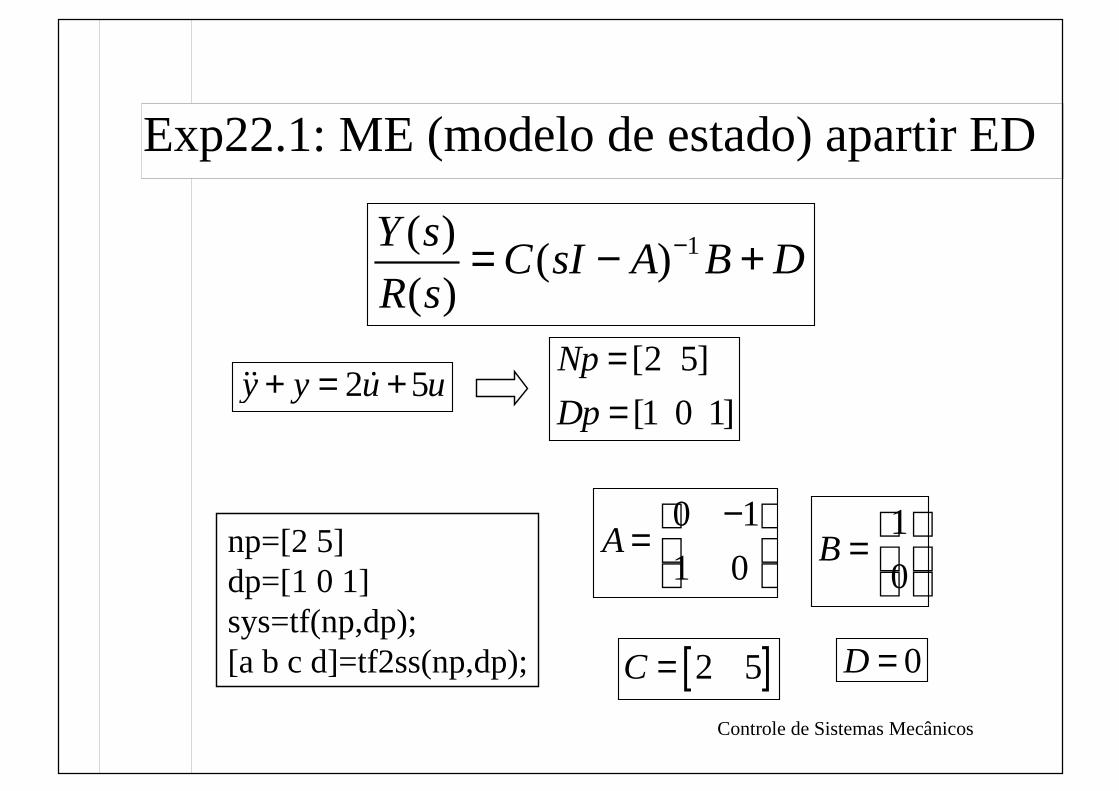
Exp22.1: ME (modelo de estado) apartir ED
1( )( )
( )
Y sC sI A B D
R s−= − +
2 5y y u u+ = +�� �[2 5]
[1 0 1]
Np
Dp
==
0 1
1 0A
− =
1
0B
=
[ ]2 5C = 0D =
np=[2 5]dp=[1 0 1]sys=tf(np,dp);[a b c d]=tf2ss(np,dp);
Controle de Sistemas Mecânicos
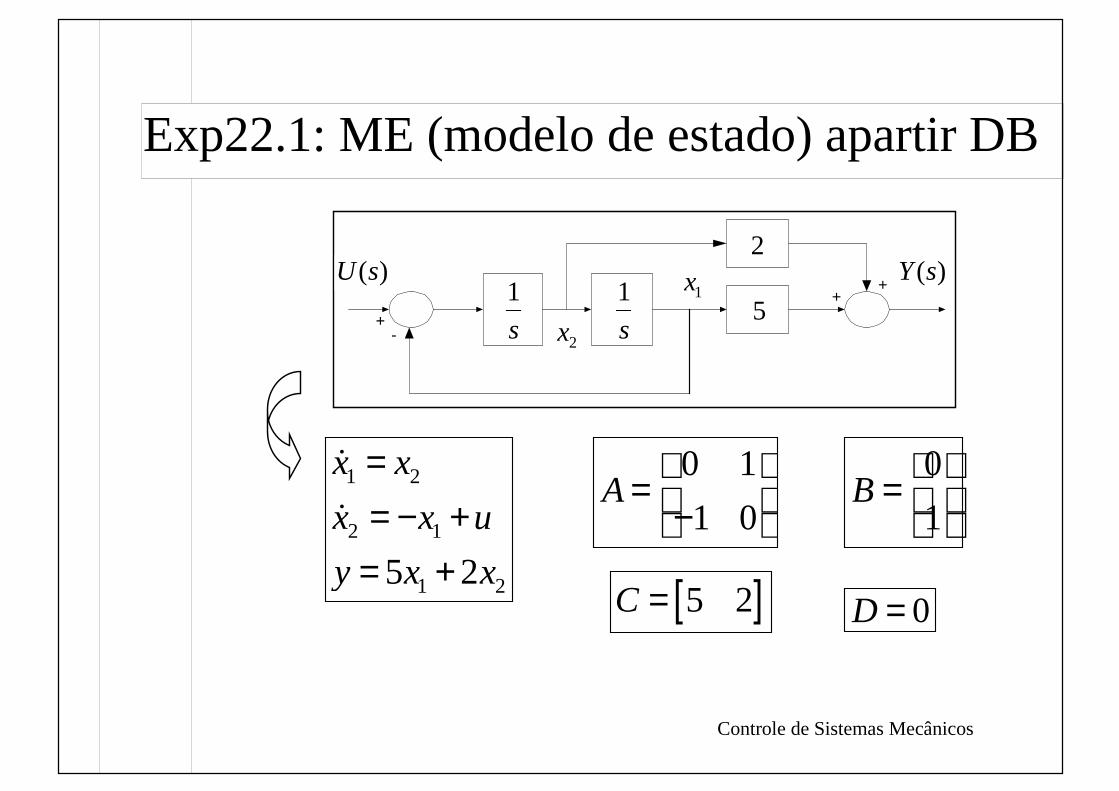
Exp22.1: ME (modelo de estado) apartir DB
0 1
1 0A
= −
0
1B
=
[ ]5 2C = 0D =
-+
++
5
)(sY)(sU2
s
1
s
1
2x
1x
1 2
2 1
1 25 2
x x
x x u
y x x
== − +
= +
��
Controle de Sistemas Mecânicos
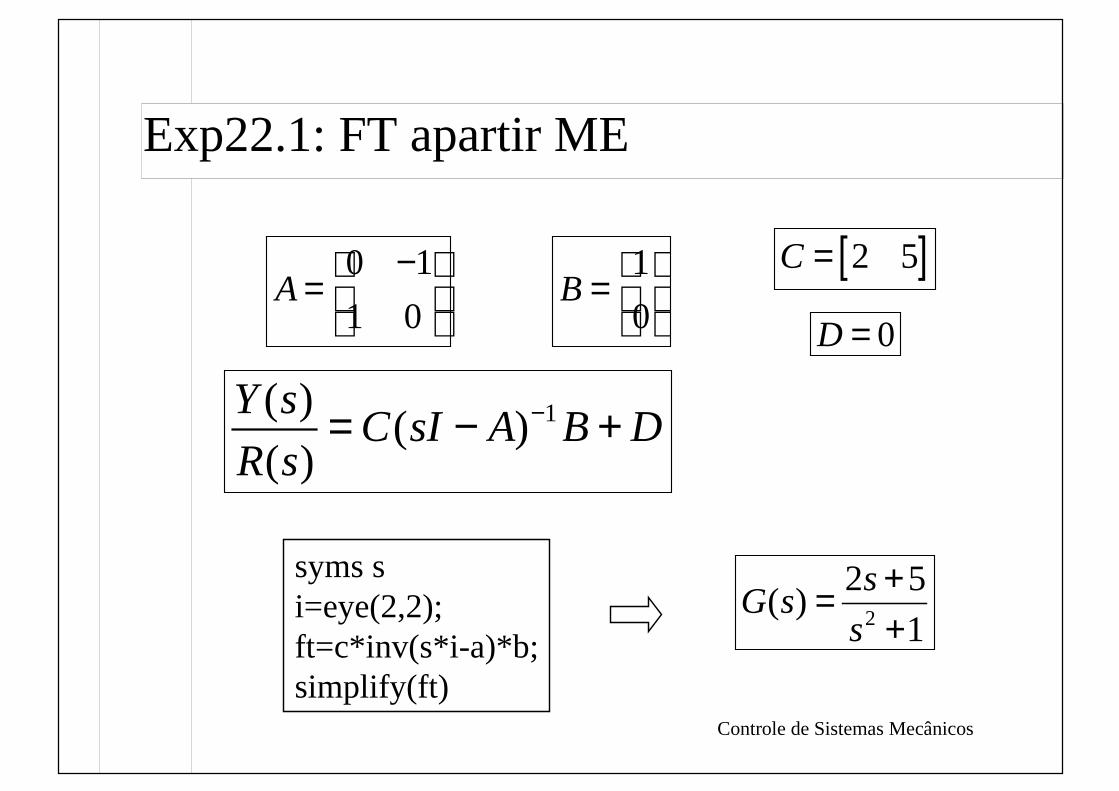
Exp22.1: FT apartir ME
1
52)(
2 ++=
s
ssG
0 1
1 0A
− =
1
0B
=
[ ]2 5C =
0D =
1( )( )
( )
Y sC sI A B D
R s−= − +
syms si=eye(2,2);ft=c*inv(s*i-a)*b;simplify(ft)
Controle de Sistemas Mecânicos
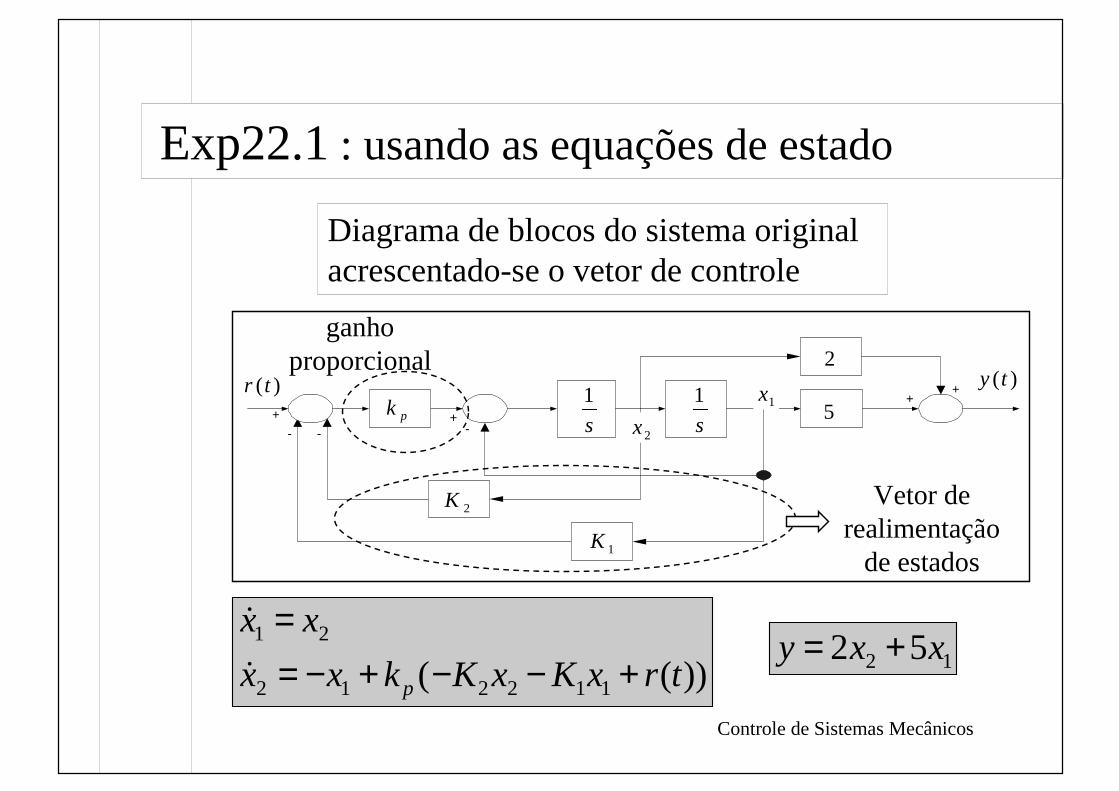
Exp22.1 : usando as equações de estado
Diagrama de blocos do sistema originalacrescentado-se o vetor de controle
-+
++
- -
+ 5
)(ty)(tr2
s
1
s
1
2x1x
pk
2K
1K
Vetor derealimentação
de estados
))(( 112212
21
trxKxKkxx
xx
p +−−+−==
�
�12 52 xxy +=
ganhoproporcional
Controle de Sistemas Mecânicos
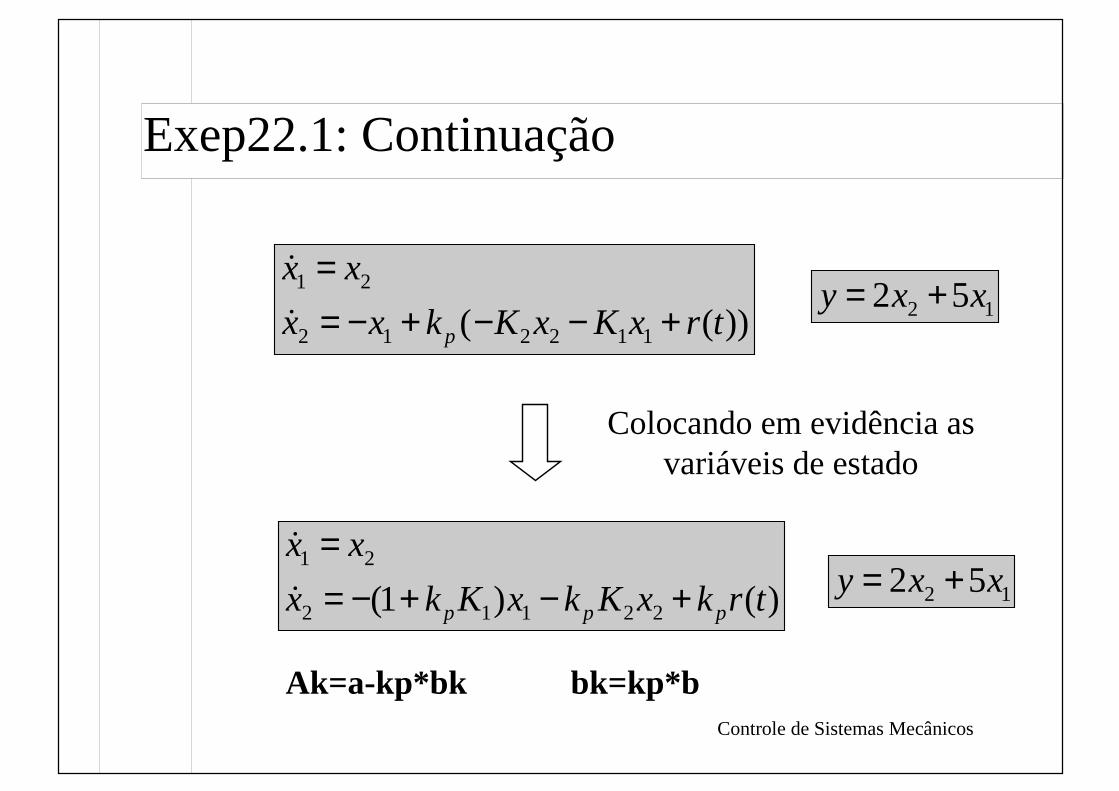
Exep22.1: Continuação
))(( 112212
21
trxKxKkxx
xx
p +−−+−==
�
�12 52 xxy +=
)()1( 22112
21
trkxKkxKkx
xx
ppp +−+−==
��
12 52 xxy +=
Colocando em evidência asvariáveis de estado
Ak=a-kp*bk bk=kp*b
Controle de Sistemas Mecânicos
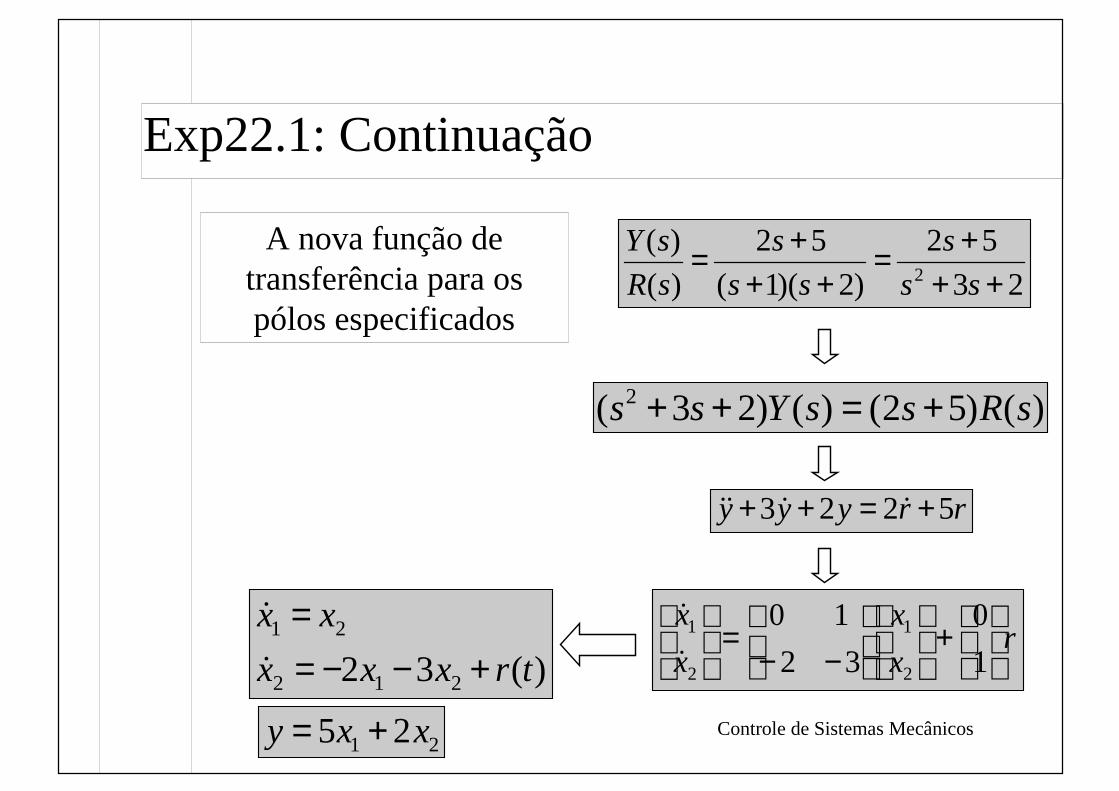
Exp22.1: Continuação
A nova função detransferência para ospólos especificados
23
52
)2)(1(
52
)(
)(2 ++
+=++
+=ss
s
ss
s
sR
sY
2( 3 2) ( ) (2 5) ( )s s Y s s R s+ + = +
rryyy 5223 +=++ ����
rx
x
x
x
+
−−
=
1
0
32
10
2
1
2
1
��
)(32 212
21
trxxx
xx
+−−==
�
�
1 25 2y x x= +

Controle de Sistemas Mecânicos
Exp22.1: Finalizando
)(32 212
21
trxxx
xx
+−−==
��
)()1( 22112
21
trkxKkxKkx
xx
ppp +−+−==
�
�
Comparando-se
21 1 =+ Kkp
32 =Kkp
1=pk 11 =K 32 =K
1=pk
Controle de Sistemas Mecânicos
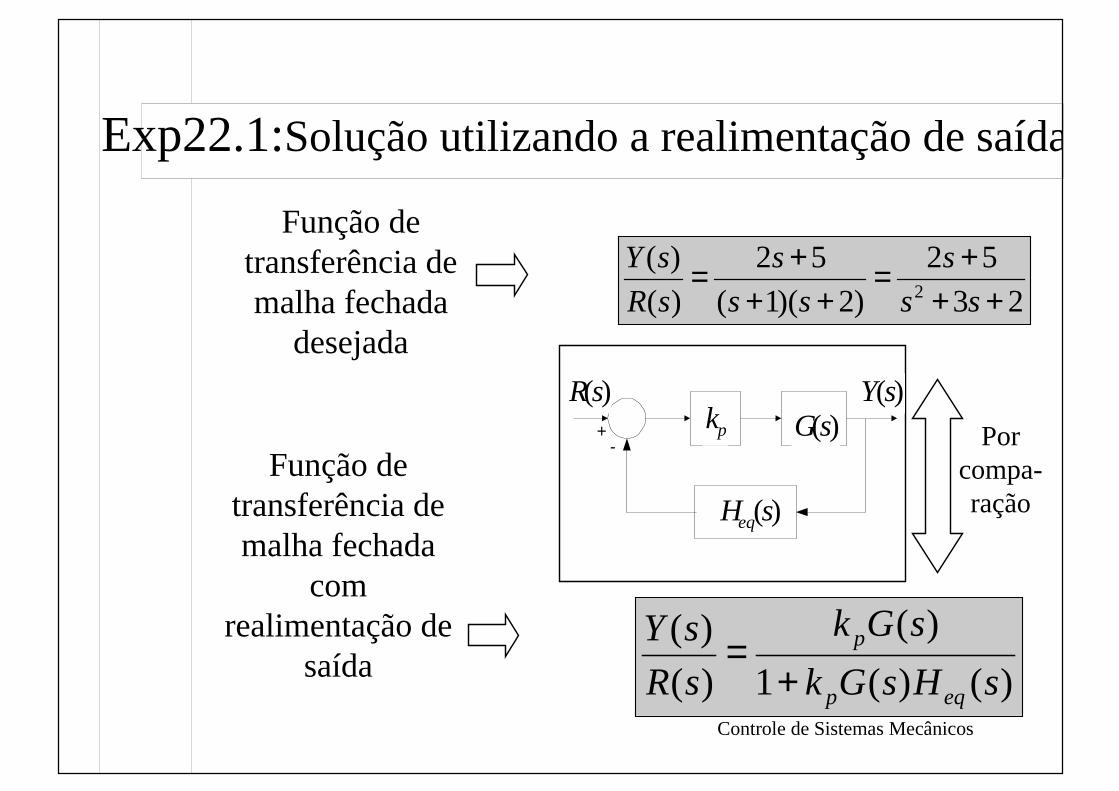
Exp22.1:Solução utilizando a realimentação de saída
)()(1
)(
)(
)(
sHsGk
sGk
sR
sY
eqp
p
+=
-+
)(sHeq
)(sG)(sY)(sR
pk
23
52
)2)(1(
52
)(
)(2 ++
+=++
+=ss
s
ss
s
sR
sY
Função detransferência demalha fechada
comrealimentação de
saída
Função detransferência demalha fechada
desejada
Porcompa-ração
Controle de Sistemas Mecânicos
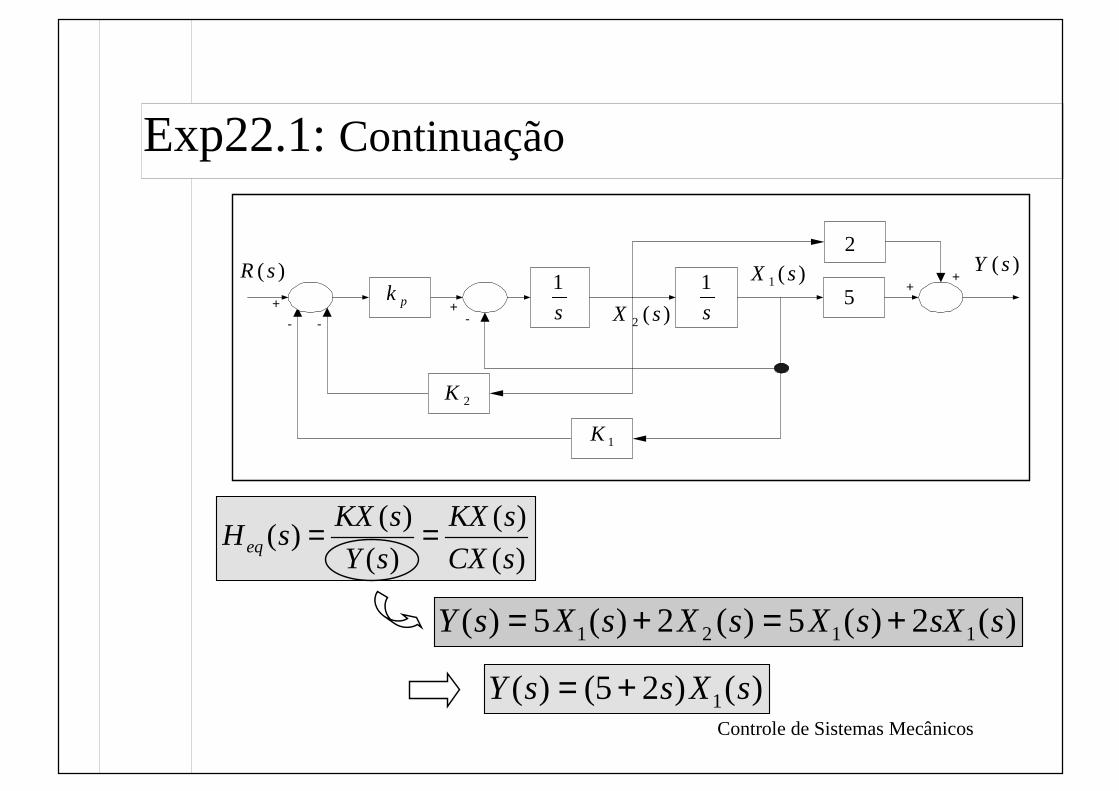
Exp22.1: Continuação
)(
)(
)(
)()(
sCX
sKX
sY
sKXsHeq ==
-+
++
- -
+ 5
)( sY)( sR2
s
1
s
1
)(2 sX
)(1 sXpk
2K
1K
)(2)(5)(2)(5)( 1121 ssXsXsXsXsY +=+=
)()25()( 1 sXssY +=
Controle de Sistemas Mecânicos
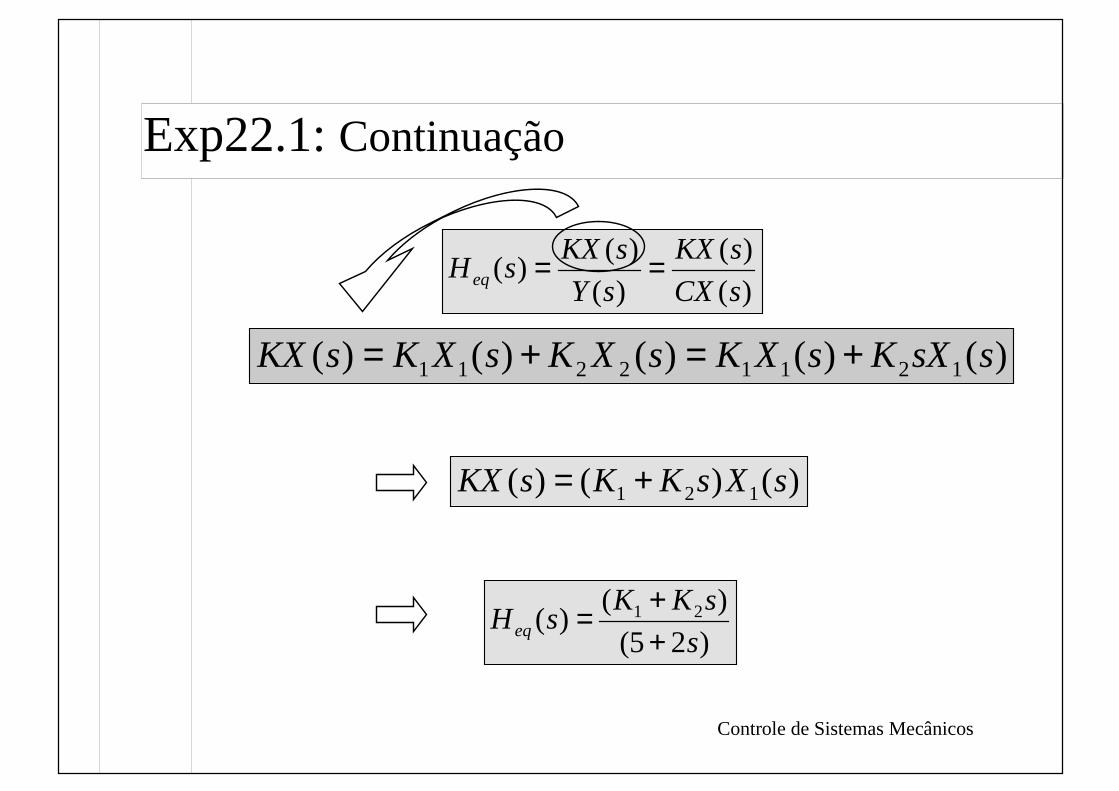
Exp22.1: Continuação
)(
)(
)(
)()(
sCX
sKX
sY
sKXsHeq ==
)()()( 121 sXsKKsKX +=
)()()()()( 12112211 ssXKsXKsXKsXKsKX +=+=
)25(
)()( 21
s
sKKsHeq +
+=
Controle de Sistemas Mecânicos
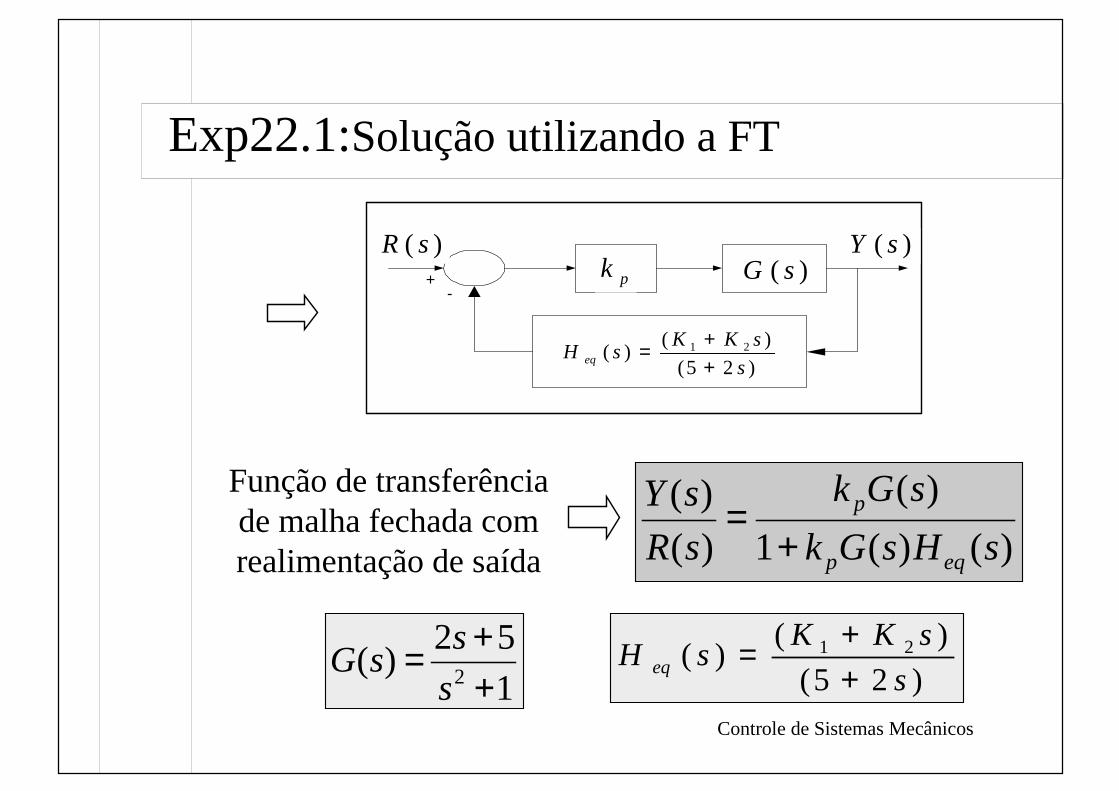
Exp22.1:Solução utilizando a FT
)()(1
)(
)(
)(
sHsGk
sGk
sR
sY
eqp
p
+=
Função de transferênciade malha fechada comrealimentação de saída
1
52)(
2 ++=
s
ssG
-+
)25(
)()( 21
s
sKKsH eq +
+=
)( sG)( sY)( sR
pk
)25(
)()( 21
s
sKKsH eq +
+=

Controle de Sistemas Mecânicos
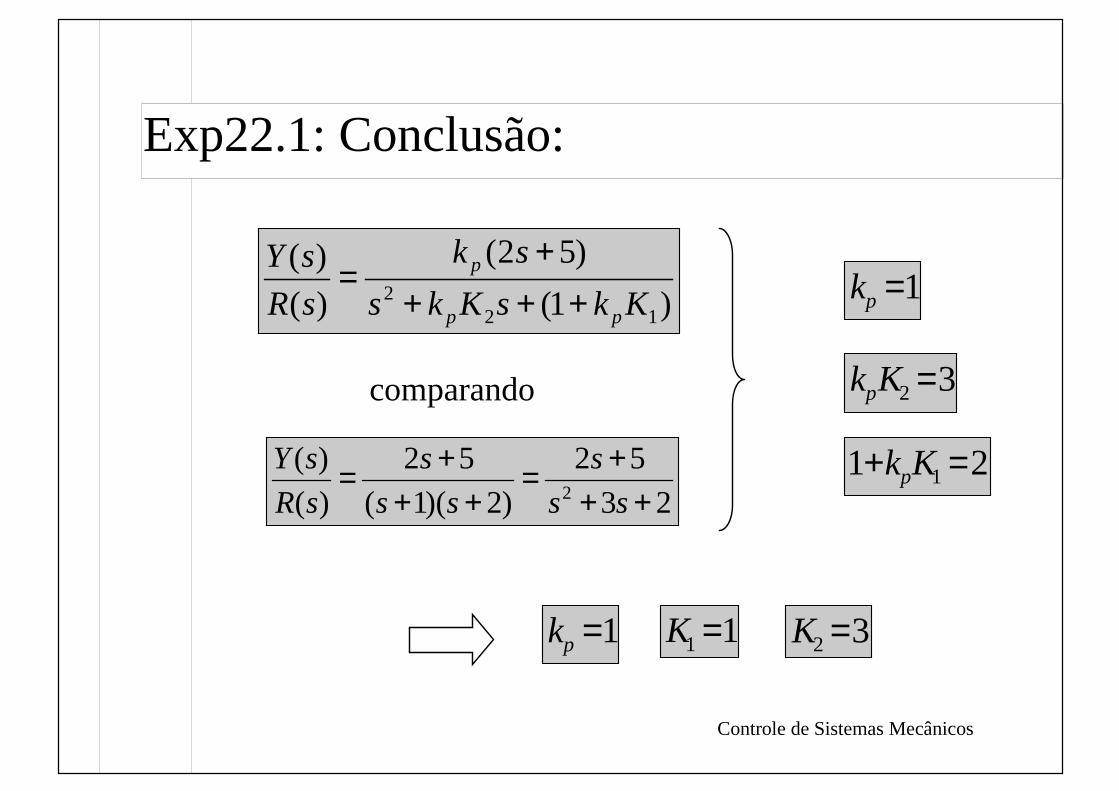
Exp22.1: Conclusão
)1(
)52(
)(
)(
122 KksKks
sk
sR
sY
pp
p
++++
=
)()(1
)(
)(
)(
sHsGk
sGk
sR
sY
eqp
p
+=
1
52)(
2 ++=
s
ssG
)25(
)()( 21
s
sKKsH eq +
+=
++
+++
++
=
)25()(
152
1
152
)(
)(
212
2
s
sKK
s
sk
s
sk
sR
sY
p
p
Controle de Sistemas Mecânicos
Exp22.1: Conclusão:
23
52
)2)(1(
52
)(
)(2 ++
+=++
+=ss
s
ss
s
sR
sY 21 1 =+ Kkp
32 =Kkp
1=pk
1=pk 11 =K 32 =K
)1(
)52(
)(
)(
122 KksKks
sk
sR
sY
pp
p
++++
=
comparando
Controle de Sistemas Mecânicos
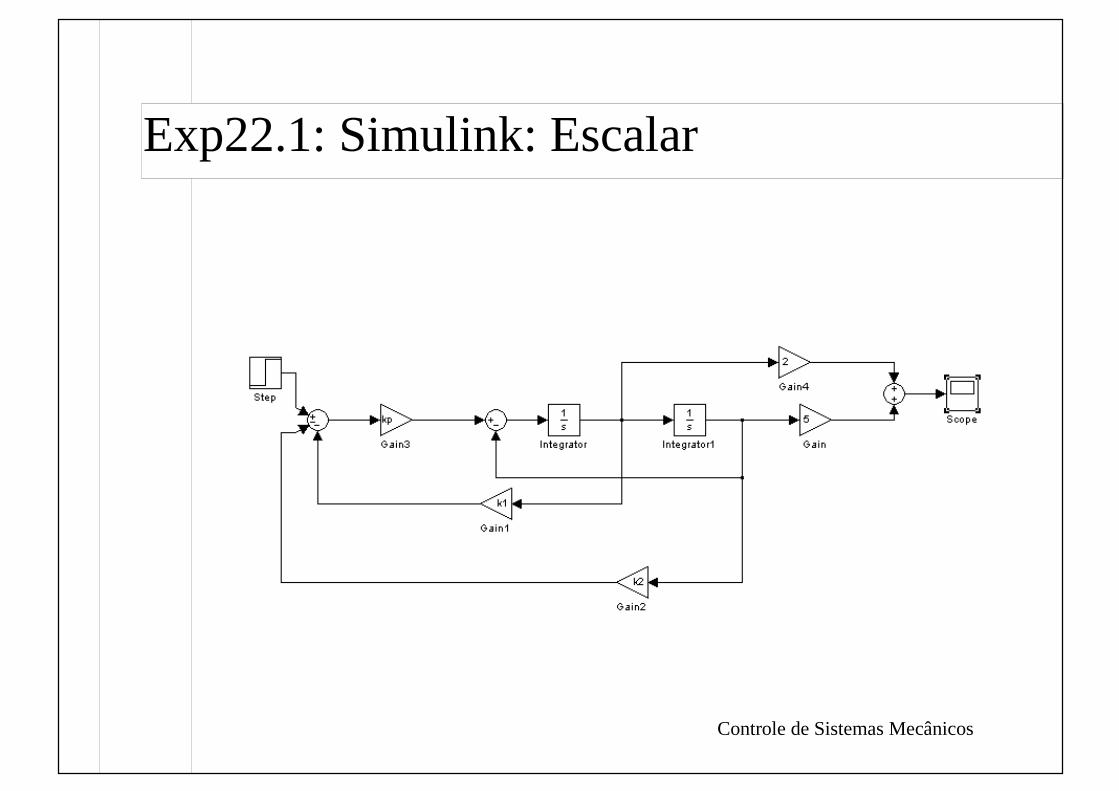
Exp22.1: Simulink: Escalar
Controle de Sistemas Mecânicos
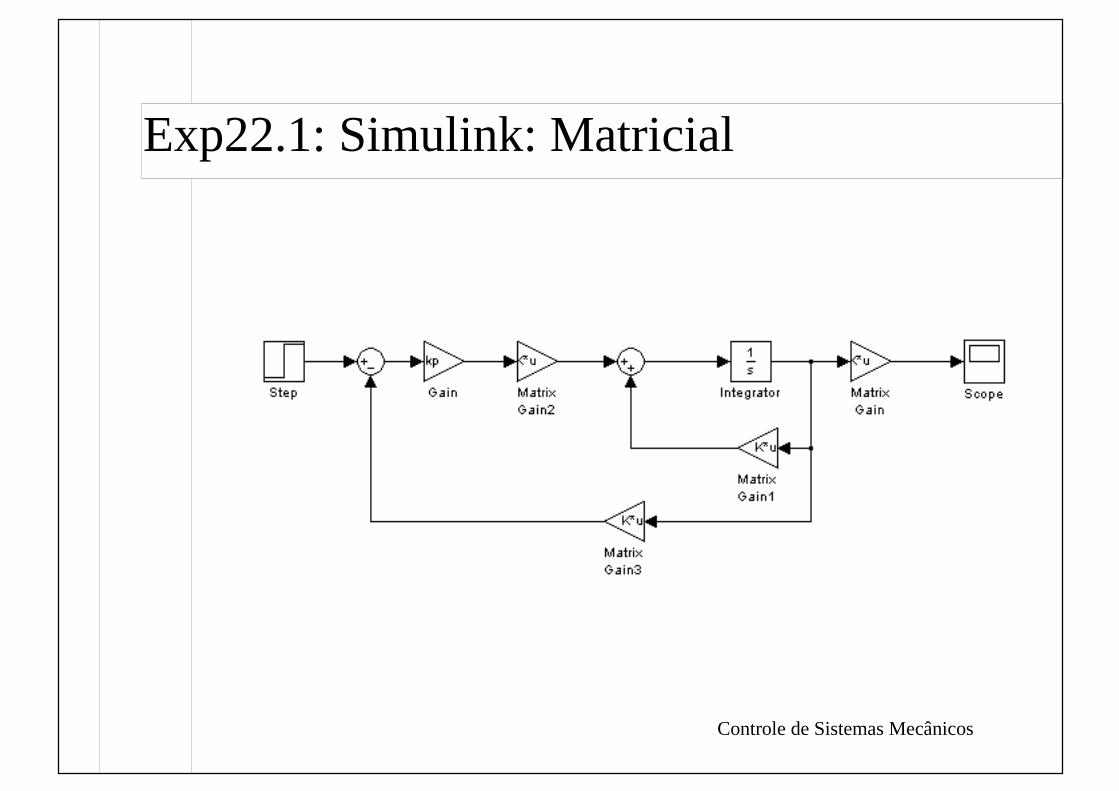
Exp22.1: Simulink: Matricial
Controle de Sistemas Mecânicos
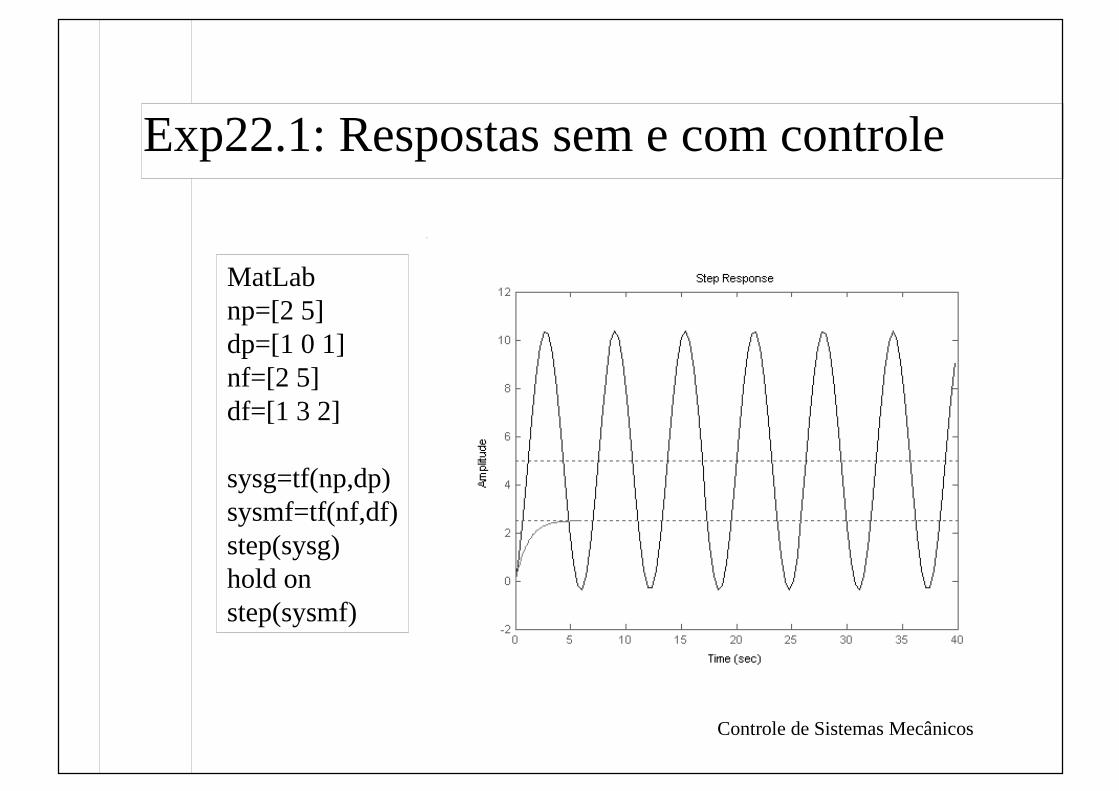
Exp22.1: Respostas sem e com controle
MatLabnp=[2 5]dp=[1 0 1]nf=[2 5]df=[1 3 2]
sysg=tf(np,dp)sysmf=tf(nf,df)step(sysg)hold onstep(sysmf)
Controle de Sistemas Mecânicos
Exercício 22.1
� Encontrar o vetor de ganhos p/ transformaro sistema de 2a. ordem abaixo porrealimentação de estados e realimentaçãode saída:
FA=0.1
FN=1rad/s
FA=0.707
FN=10rad/s
Controle de Sistemas Mecânicos
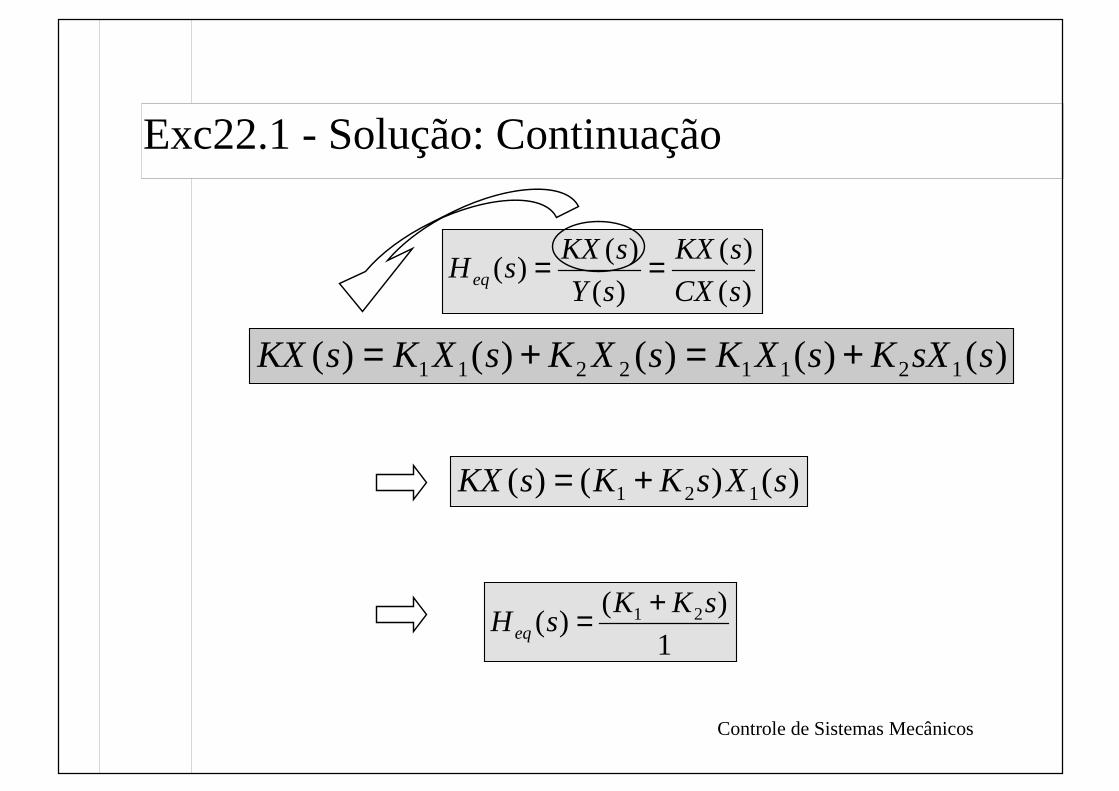
Exc22.1 - Solução: Continuação
)(
)(
)(
)()(
sCX
sKX
sY
sKXsHeq ==
)()()( 121 sXsKKsKX +=
)()()()()( 12112211 ssXKsXKsXKsXKsKX +=+=
1
)()( 21 sKK
sHeq
+=


















