![D ^WZK& Ð D Z/ 1>/ /& E' Z DWK yW Z/ E / W &W/ í r · ^ ] D µ v ] ] o µ } D ^WZK& Ð D Z/ 1>/ /& E' Z _ >hEK ~ z z z z z z z z z z z z z z z z z z z z z z z z z z z z z z z z](https://static.fdocumentos.com/doc/165x107/60424deb8ee6026fbb00a908/d-wzk-d-z-1-e-z-dwk-yw-z-e-w-w-r-d-v-.jpg)
Relações entre os Plano-s e Plano-z - cear.ufpb.br · pontos internos do circulo unitário do...
66
Relações entre os Plano-s e Plano-z Prof. Juan Moises Mauricio Villanueva [email protected] www.cear.ufpb.br/juan 1
Transcript of Relações entre os Plano-s e Plano-z - cear.ufpb.br · pontos internos do circulo unitário do...
Relações entre os Plano-s e Plano-z
Prof. Juan Moises Mauricio Villanueva
www.cear.ufpb.br/juan
1

Sistemas de segunda ordem subamortecidos
2
2
1( ) 1 cos 1
1
nt
nc t e t
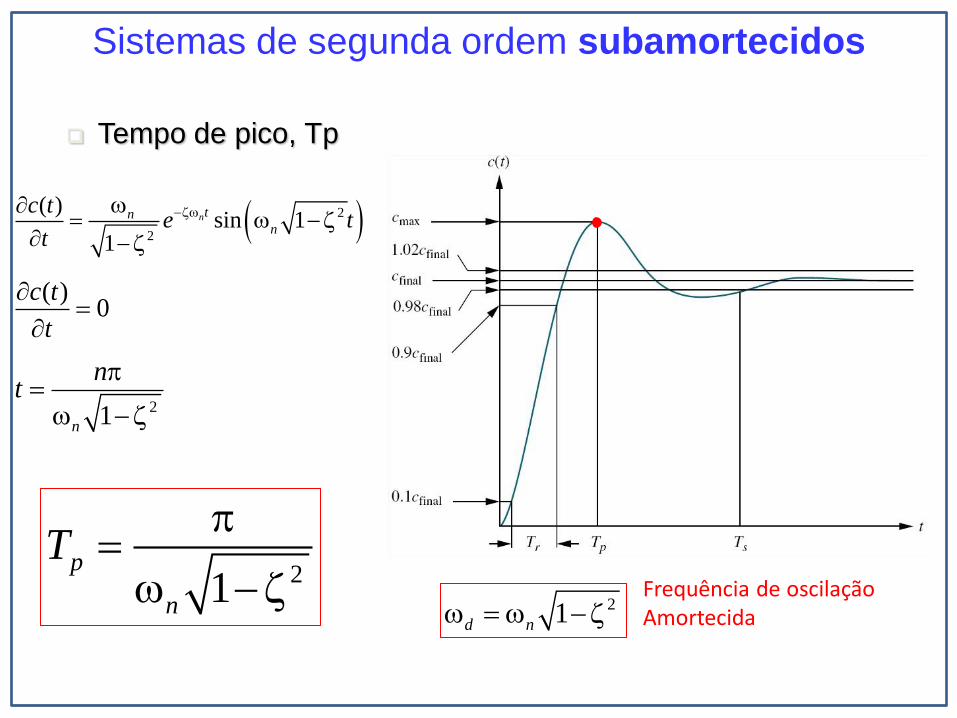
Sistemas de segunda ordem subamortecidos
Tempo de pico, Tp
21p
n
T
2
2
( )sin 1
1
ntnn
c te t
t
( )0
c t
t
21n
nt
21d n Frequência de oscilação Amortecida

Sistemas de segunda ordem subamortecidos
Sobrevalor percentual, %SP
2
max
/ 1
max
% 100
( ) 1
1
final
final
p
final
c cSP
c
c c T e
c
2/ 1
% 100SP e
2 2
ln % /100
ln % /100
SP
SP
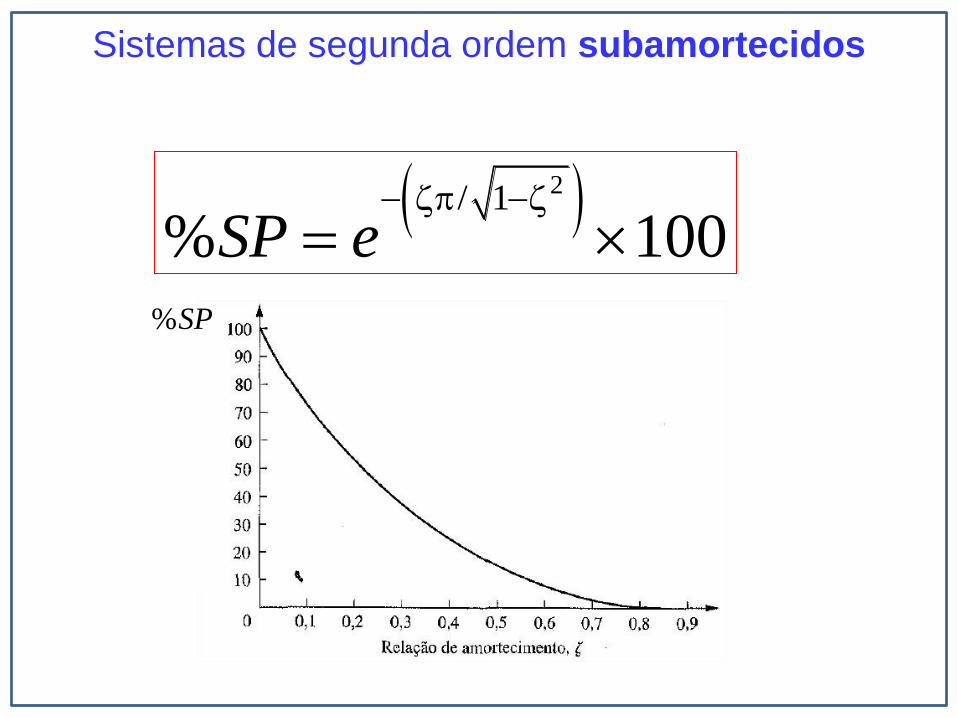
Sistemas de segunda ordem subamortecidos
2/ 1
% 100SP e
%SP

Sistemas de segunda ordem subamortecidos
Tempo de assentamento ou de estabilização, Ts
É o tempo necessário para que o sistema se estabilize em uma faixa de 2% do valor final, cfinal.
2
2
1( ) 1 cos 1
1
nt
nc t e t
A amplitude máxima da função coseno tem que ser 0,02 e t=Ts
2ln 0,02 1
s
n
T
44s
n
T
= constante de tempo
0 0,9
Para
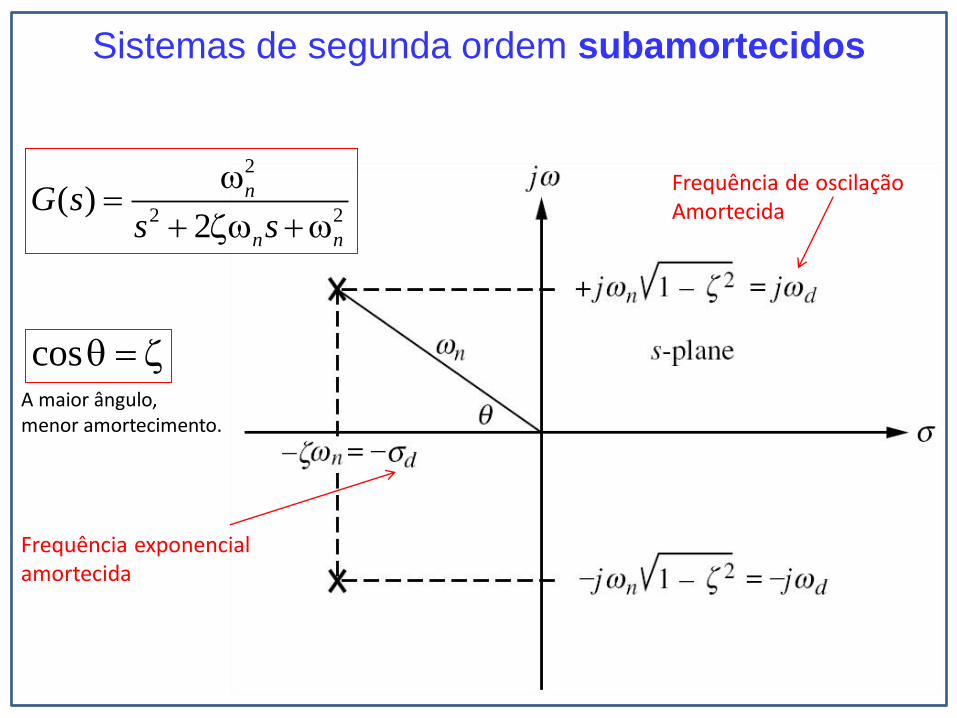
Sistemas de segunda ordem subamortecidos
2
2 2( )
2
n
n n
G ss s
Frequência de oscilação Amortecida
Frequência exponencial amortecida
cos A maior ângulo, menor amortecimento.

Sistemas de segunda ordem subamortecidos
1%SP
2%SP
2/ 1
% 100SP e
44s
n
T
21p
n
T
1 1
2 2
1 2 1 2
1 2
cos
cos
cos cosSe
12

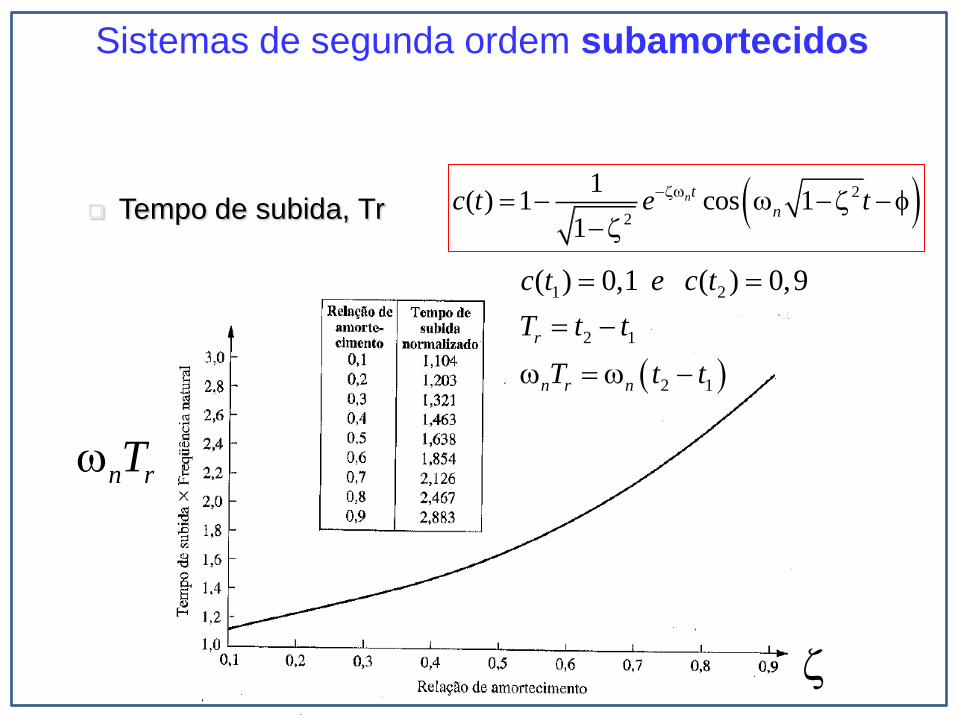
Sistemas de segunda ordem subamortecidos
Tempo de subida, Tr
21r
n
T
1 1tan tand d
n d
Sistemas de segunda ordem subamortecidos
Tempo de subida, Tr 2
2
1( ) 1 cos 1
1
nt
nc t e t
n rT
1 2
2 1
2 1
( ) 0,1 ( ) 0,9
r
n r n
c t e c t
T t t
T t t

11
Resposta ao Degrau para Diferentes valores do
Coeficientes de Amortecimento
0
0.1
0.2
1.0
0.9
0.3
0.40.5
0.6
0.7 0.8

12
Resposta ao Degrau para Diferentes valores do
Coeficientes de Amortecimento
Tipo de Resposta Características
Sub amortecido 0<<1
Polos Complexos Conjugados. Apresenta oscilações
Criticamente Amortecido =1
Polos reais iguais. Sem oscilações
Sobre amortecido >1 (Superamortecido)
Polos reais negativos. Resposta lenta sem oscilação.

13
Relações entre os Planos-S e Plano-Z
Os pontos do semiplano esquerdo do plano-S correspondem aos pontos internos do circulo unitário do plano-Z
Os pontos sobre o eixo imaginário do plano-S correspondem aos pontos sobre o circulo unitário
Os pontos do semiplano direito do plano-S correspondem aos pontos fora do circulo unitário

Tempo de assentamento ou de estabilização, Ts
4 44s
n
T
s j
j
Traio e
sT T j T
s j
z e e e

Lugar Geométrico de Frequência Constante
j
ângulo T
2
sj
2
sj
Polos com Frequência constante
Linhas radiais com ângulo T sT T j T
s j
z e e e
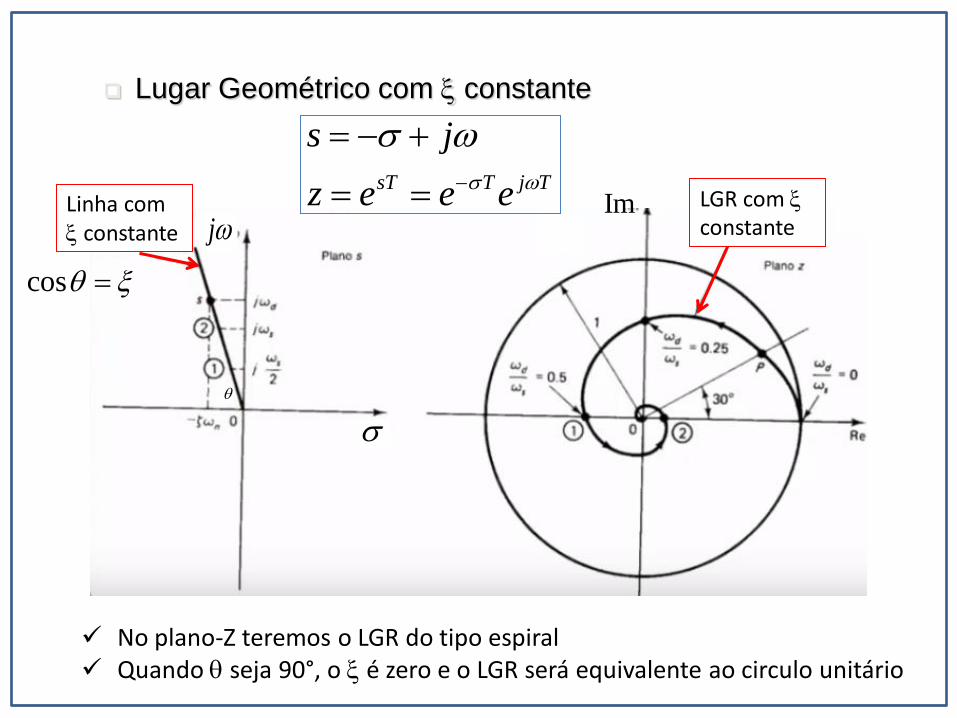
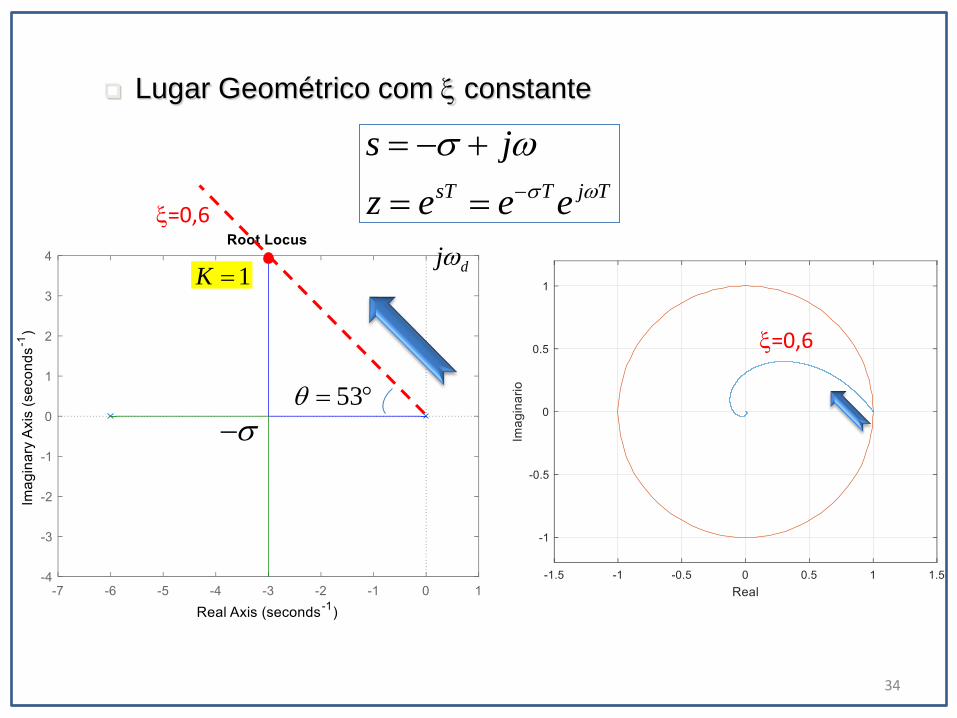
Lugar Geométrico com constante
j
Linha com constante
cos
Im LGR com constante
No plano-Z teremos o LGR do tipo espiral Quando seja 90°, o é zero e o LGR será equivalente ao circulo unitário
sT T j T
s j
z e e e
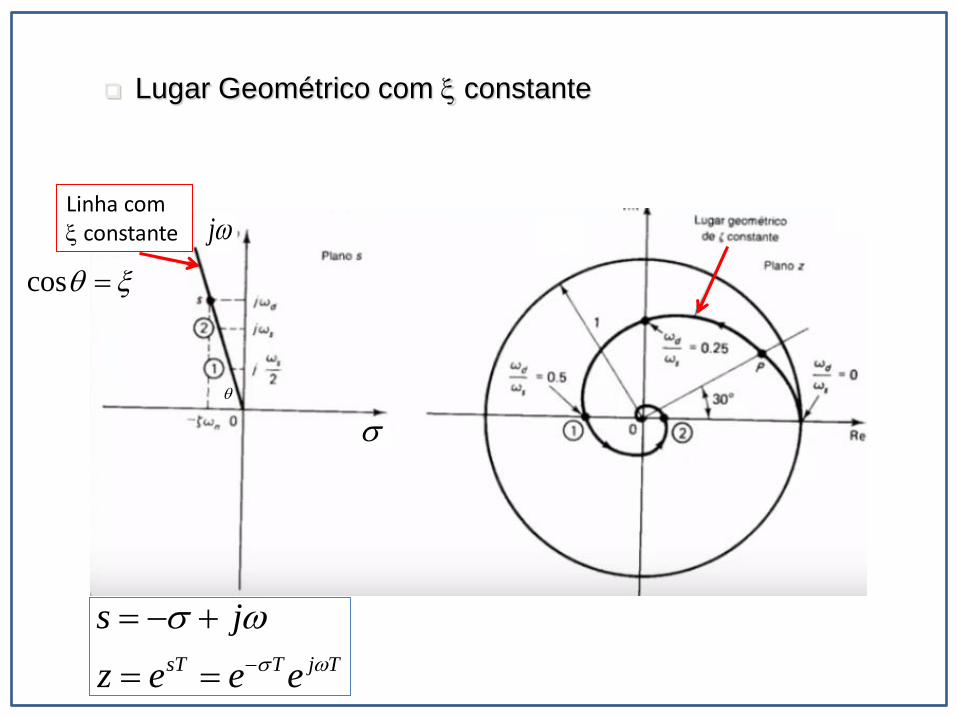
Lugar Geométrico com constante
j
Linha com constante
cos
sT T j T
s j
z e e e
j
Linha com constante
cos
Im LGR com constante
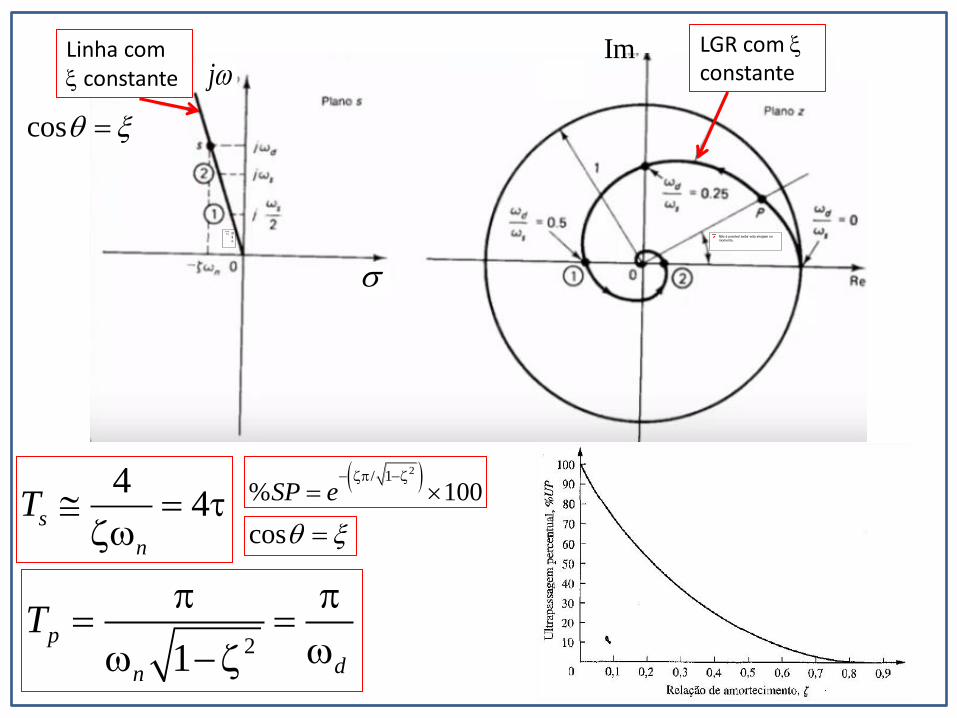
44s
n
T
21p
dn
T
2/ 1
% 100SP e
cos
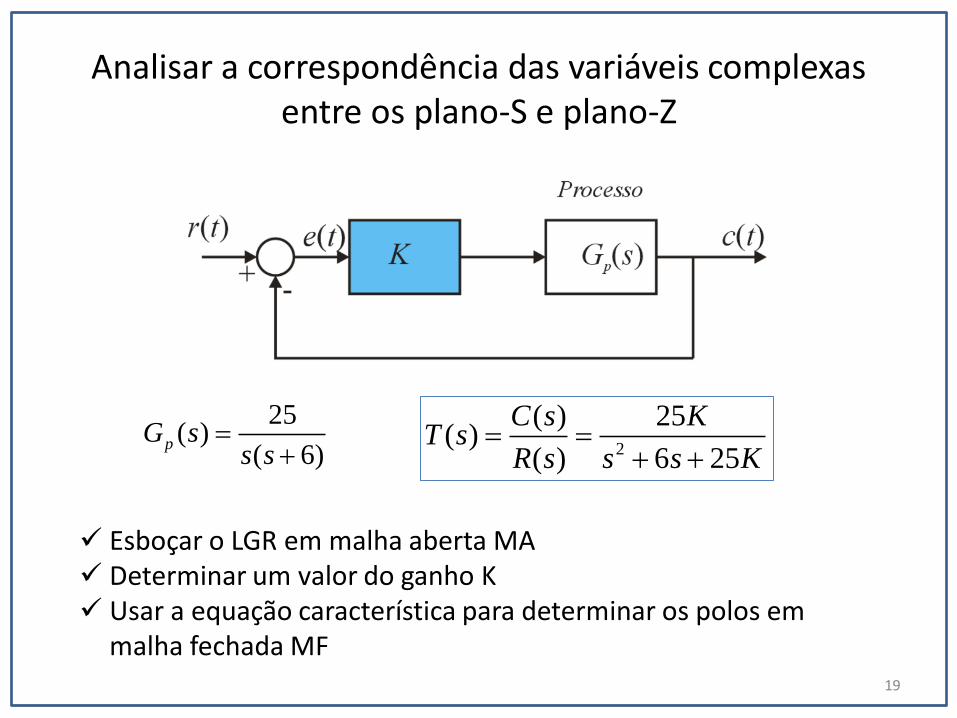
Analisar a correspondência das variáveis complexas entre os plano-S e plano-Z
19
2
( ) 25( )
( ) 6 25
C s KT s
R s s s K
25( )
( 6)pG s
s s
Esboçar o LGR em malha aberta MA Determinar um valor do ganho K Usar a equação característica para determinar os polos em
malha fechada MF

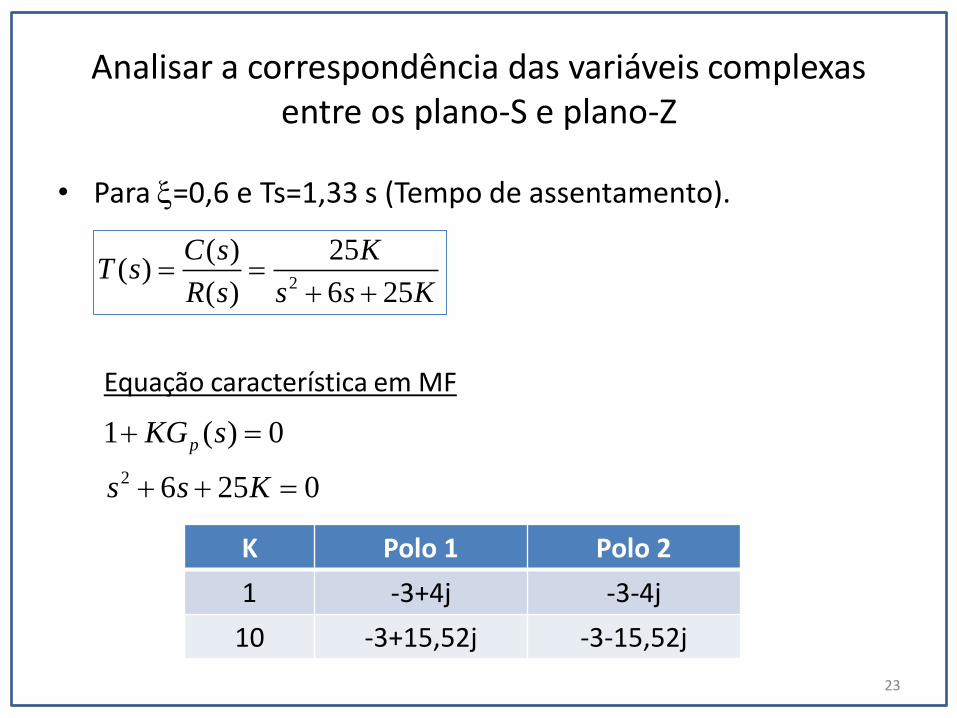
Analisar a correspondência das variáveis complexas entre os plano-S e plano-Z
20
%% Em malha aberta MA
NumMA = 25;
DenMA = [1 6 0];
sysMA = tf(NumMA,DenMA);
figure
rlocus(sysMA)
25: ( )
( 6)pMA KG s K
s s
Lugar Geométrico das Raízes

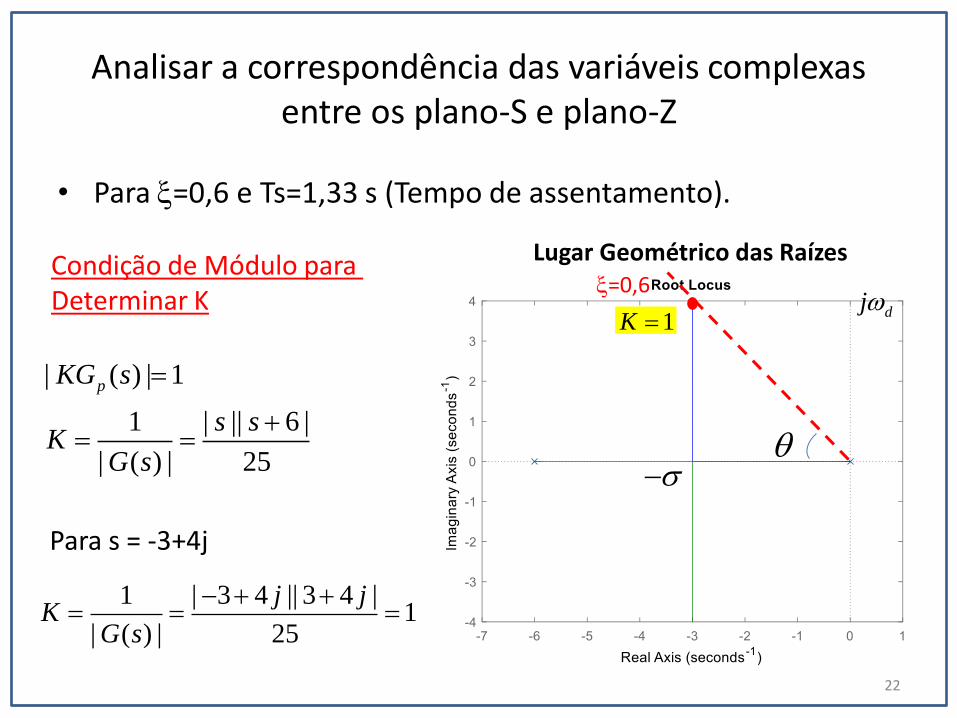
Analisar a correspondência das variáveis complexas entre os plano-S e plano-Z
• Para =0,6 e Ts=1,33 s (Tempo de assentamento).
21
25: ( )
( 6)pMA KG s K
s s
Lugar Geométrico das Raízes
cos(0,6) 53
=0,6
dj
tan 533
4 rad/s
5 rad/s
d
d
n
4 41,33
3
s
n
T s
Analisar a correspondência das variáveis complexas entre os plano-S e plano-Z
• Para =0,6 e Ts=1,33 s (Tempo de assentamento).
22
Lugar Geométrico das Raízes =0,6
dj
Condição de Módulo para Determinar K
| ( ) | 1
1 | || 6 |
| ( ) | 25
pKG s
s sK
G s
Para s = -3+4j
1 | 3 4 || 3 4 |1
| ( ) | 25
j jK
G s
1K
Analisar a correspondência das variáveis complexas entre os plano-S e plano-Z
• Para =0,6 e Ts=1,33 s (Tempo de assentamento).
23
2
( ) 25( )
( ) 6 25
C s KT s
R s s s K
2
1 ( ) 0
6 25 0
pKG s
s s K
Equação característica em MF
K Polo 1 Polo 2
1 -3+4j -3-4j
10 -3+15,52j -3-15,52j
24
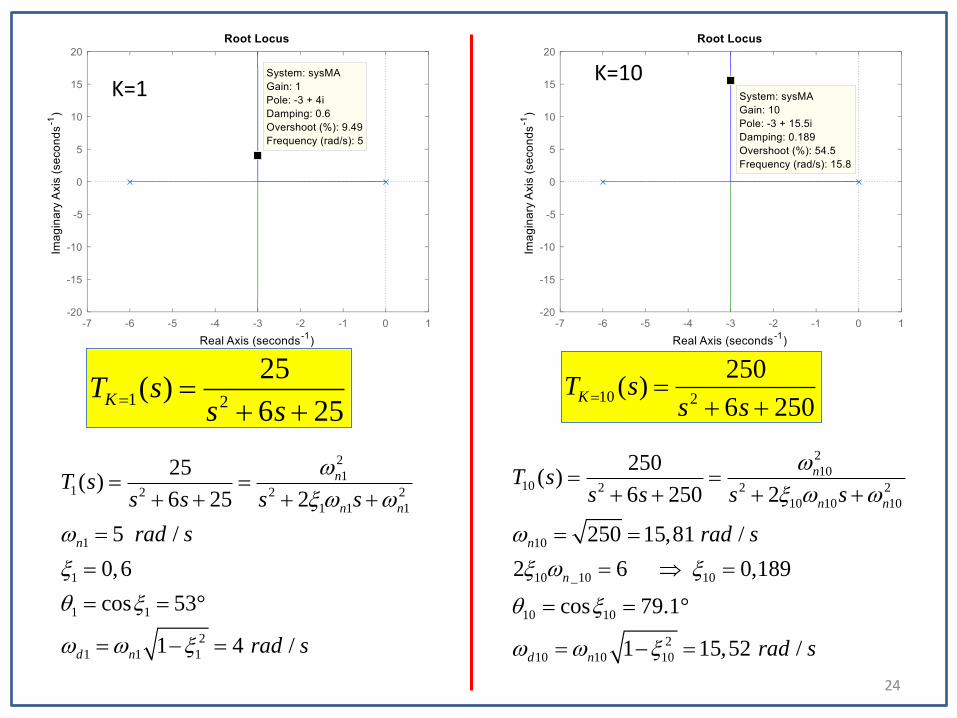
1 2
25( )
6 25KT s
s s
10 2
250( )
6 250KT s
s s
2
11 2 2 2
1 1 1
1
1
1 1
2
1 1 1
25( )
6 25 2
5 /
0,6
cos 53°
1 4 /
n
n n
n
d n
T ss s s s
rad s
rad s
2
1010 2 2 2
10 10 10
10
10 _10 10
10 10
2
10 10 10
250( )
6 250 2
250 15,81 /
2 6 0,189
cos 79.1°
1 15,52 /
n
n n
n
n
d n
T ss s s s
rad s
rad s
K=10 K=1

25
K Polo 1 Polo 2
1 -3+4j -3-4j
10 -3+15,52j -3-15,52j
26
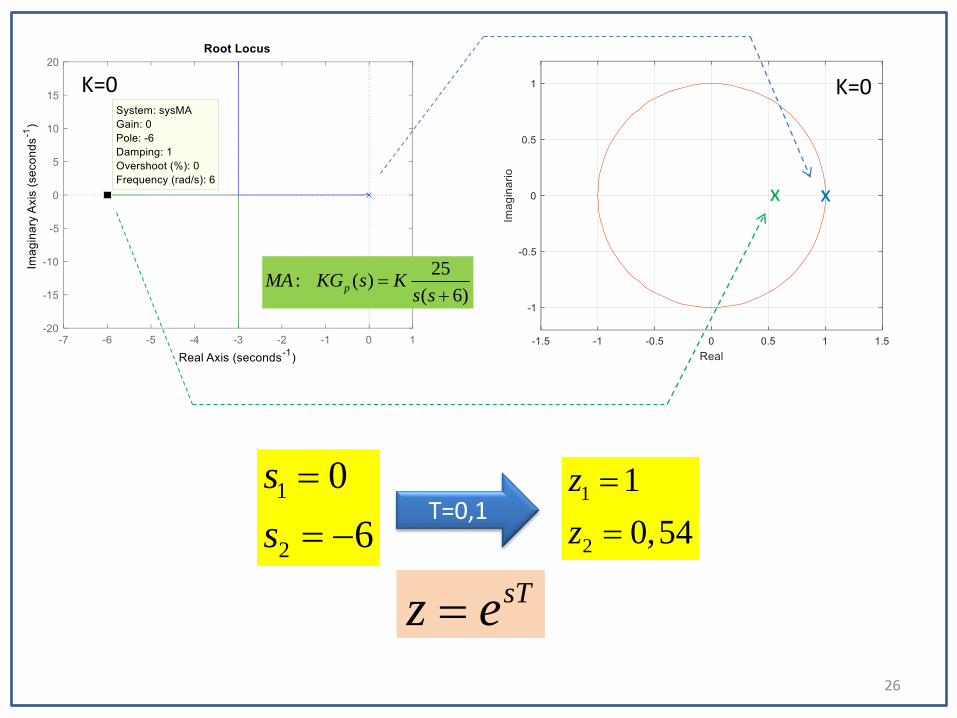
x x
K=0
T=0,1 1
2
0
6
s
s
sTz e
1
2
1
0,54
z
z
K=0
25: ( )
( 6)pMA KG s K
s s
27
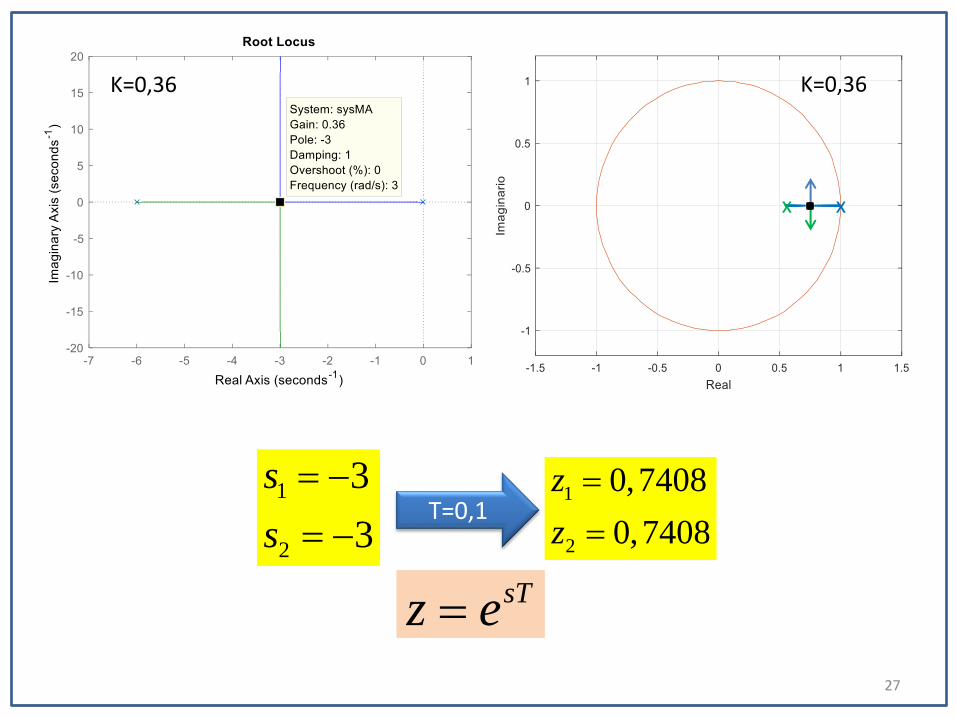
K=0,36
T=0,1 1
2
3
3
s
s
sTz e
1
2
0,7408
0,7408
z
z
K=0,36
x x

28
K=1
T=0,1 1
2
3 4
3 4
s j
s j
sTz e
1
2
0,6823 0, 2885
0,6823 0,2885
z j
z j
K=1
x x

29
K=10
T=0,1 1
2
3 15,52
3 15,52
s j
s j
sTz e
1
2
0,0136 0,7407
0,0136 0,7407
z j
z j
K=10
x x
30
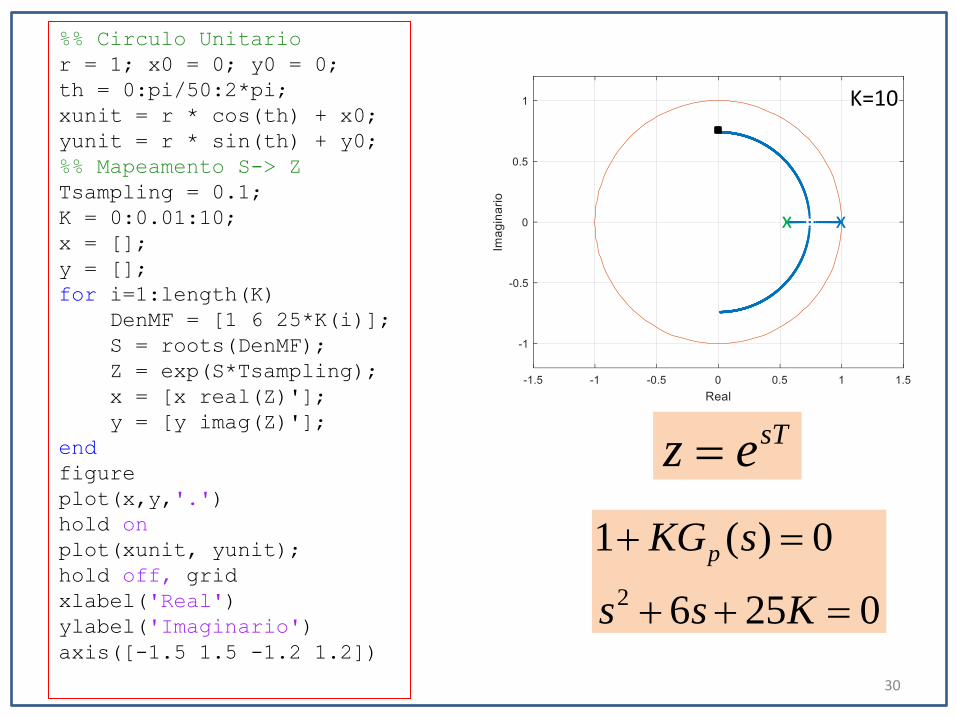
%% Circulo Unitario
r = 1; x0 = 0; y0 = 0;
th = 0:pi/50:2*pi;
xunit = r * cos(th) + x0;
yunit = r * sin(th) + y0;
%% Mapeamento S-> Z
Tsampling = 0.1;
K = 0:0.01:10;
x = [];
y = [];
for i=1:length(K)
DenMF = [1 6 25*K(i)];
S = roots(DenMF);
Z = exp(S*Tsampling);
x = [x real(Z)'];
y = [y imag(Z)'];
end
figure
plot(x,y,'.')
hold on
plot(xunit, yunit);
hold off, grid
xlabel('Real')
ylabel('Imaginario')
axis([-1.5 1.5 -1.2 1.2])
K=10
x x
sTz e
2
1 ( ) 0
6 25 0
pKG s
s s K

Lugar Geométrico com constante
j
Linha com constante
cos
Im LGR com constante
No plano-Z teremos o LGR do tipo espiral Quando seja 90°, o é zero e o LGR será equivalente ao circulo unitário
sT T j T
s j
z e e e

Lugar Geométrico com constante
sT T j T
s j
z e e e

Lugar Geométrico com constante
sT T j T
s j
z e e e
Para 0<d<0.5s
34
=0,6
53
dj
1K
Lugar Geométrico com constante
sT T j T
s j
z e e e
=0,6
35
=0,6
53
dj
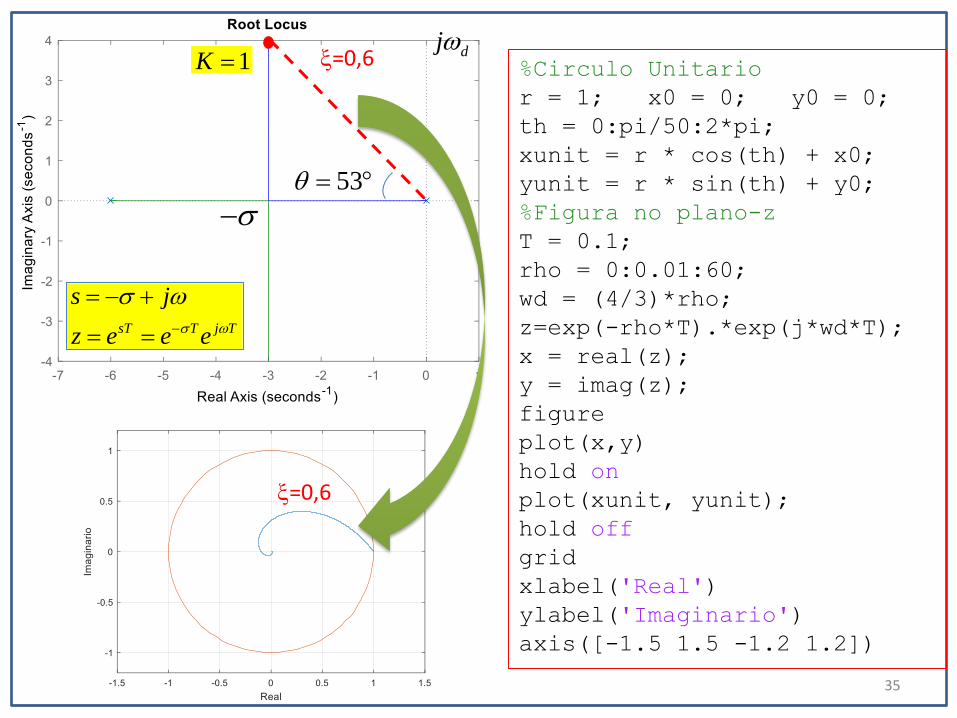
1K %Circulo Unitario
r = 1; x0 = 0; y0 = 0;
th = 0:pi/50:2*pi;
xunit = r * cos(th) + x0;
yunit = r * sin(th) + y0;
%Figura no plano-z
T = 0.1;
rho = 0:0.01:60;
wd = (4/3)*rho;
z=exp(-rho*T).*exp(j*wd*T);
x = real(z);
y = imag(z);
figure
plot(x,y)
hold on
plot(xunit, yunit);
hold off
grid
xlabel('Real')
ylabel('Imaginario')
axis([-1.5 1.5 -1.2 1.2])
sT T j T
s j
z e e e
=0,6

36
• No plano-s, linhas com constantes são normais a linhas com n constantes.
• No plano-z, esta propriedade se mantem.
Comando MATLAB: zgrid
Métodos de Discretização (Aproximações)
37

38
1zs
T
1z sT
Forward differences (Euler)
Backward differences 1z
szT
1
1z
sT
2 1
1
zs
T z
12
12
sT
zsT
Aproximação trapezoidal (Tustin-Bilinear)
lnsT zz e s
T
Transformação Exata
APROXIMAÇÕES s z z s
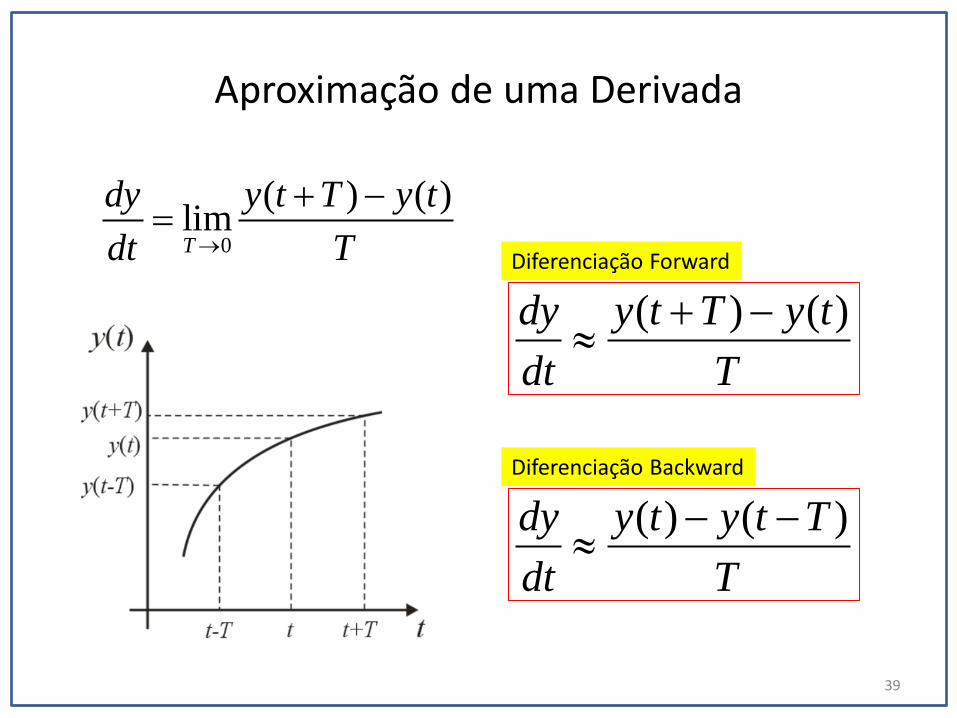
Aproximação de uma Derivada
39
0
( ) ( )limT
dy y t T y t
dt T
( ) ( )dy y t T y t
dt T
Diferenciação Forward
( ) ( )dy y t y t T
dt T
Diferenciação Backward

1. Método Forward Difference (Euler)
40
( ) ( )dy y t T y t
dt T
Diferenciação Forward
T = Tempo de amostragem
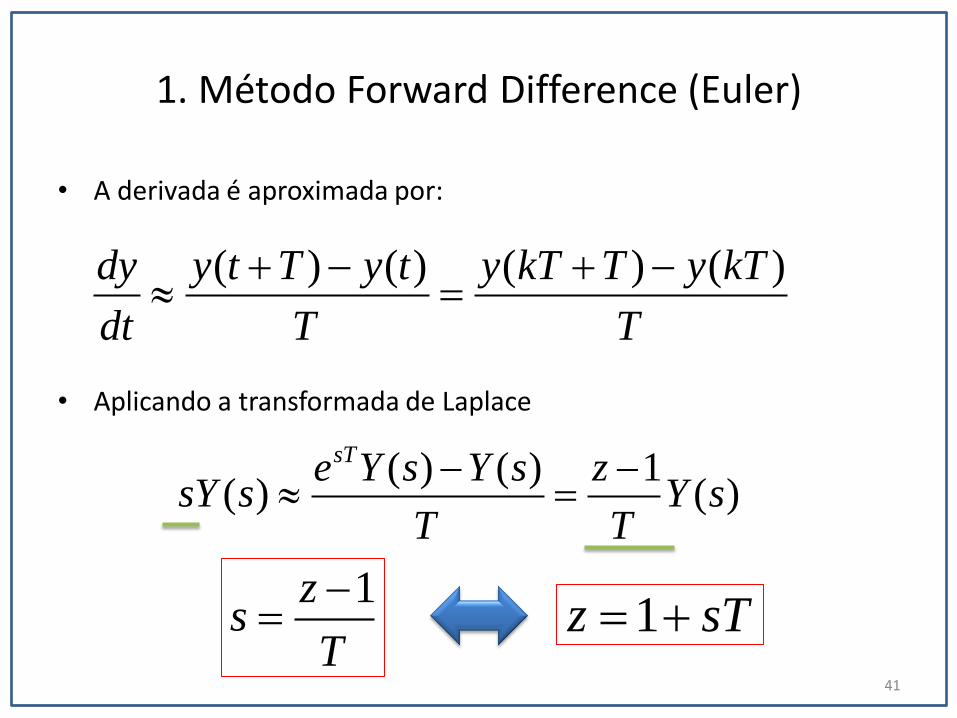
1. Método Forward Difference (Euler)
• A derivada é aproximada por:
• Aplicando a transformada de Laplace
41
( ) ( ) ( ) ( )dy y t T y t y kT T y kT
dt T T
( ) ( ) 1( ) ( )
sTe Y s Y s zsY s Y s
T T
1zs
T
1z sT

1. Método Forward Difference (Euler)
42
1zs
T
1z sT
O semi-plano esquerdo do plano-s é mapeado para a região que inclui o círculo unitário no plano-z
Nesta aproximação é possível que um sistema contínuo estável seja transformado em um sistema discreto instável (polos em z fora do círculo unitário)
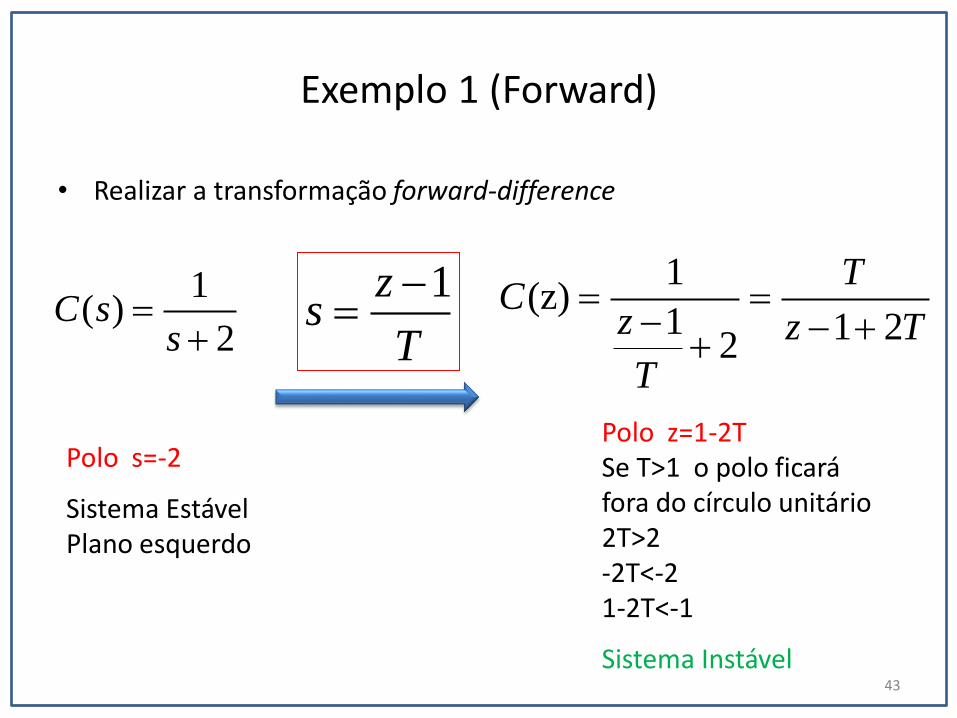
Exemplo 1 (Forward)
• Realizar a transformação forward-difference
43
1( )
2C s
s
1zs
T
1(z)
1 1 22
TC
z z T
T
Polo s=-2
Sistema Estável Plano esquerdo
Polo z=1-2T Se T>1 o polo ficará fora do círculo unitário 2T>2 -2T<-2 1-2T<-1
Sistema Instável

Exemplo 2 (Forward)
44
( )y t1
s
( )u t1z
sT
( ) 1
( )
Y s
U s s
( )y k
1
T
z
( )u k
(z)
(z) 1
Y T
U z
Integrador Continuo Integrador Discreto

Exemplo 2 (Forward)
• Para o Integrador
45
( ) ( )
t T
t
y t u t dt
( )
( ) ( )( )
( 1) ( )( )
( 1) ( ) ( )
dyu t
dt
y t T y tu t
T
y k y ku k
T
y k y k Tu k
Aproximação retangular
Área Retangular

2. Método Backward Difference
46
( ) ( )dy y t y t T
dt T
Diferenciação Backward
T = Tempo de amostragem
2. Método Backward Difference
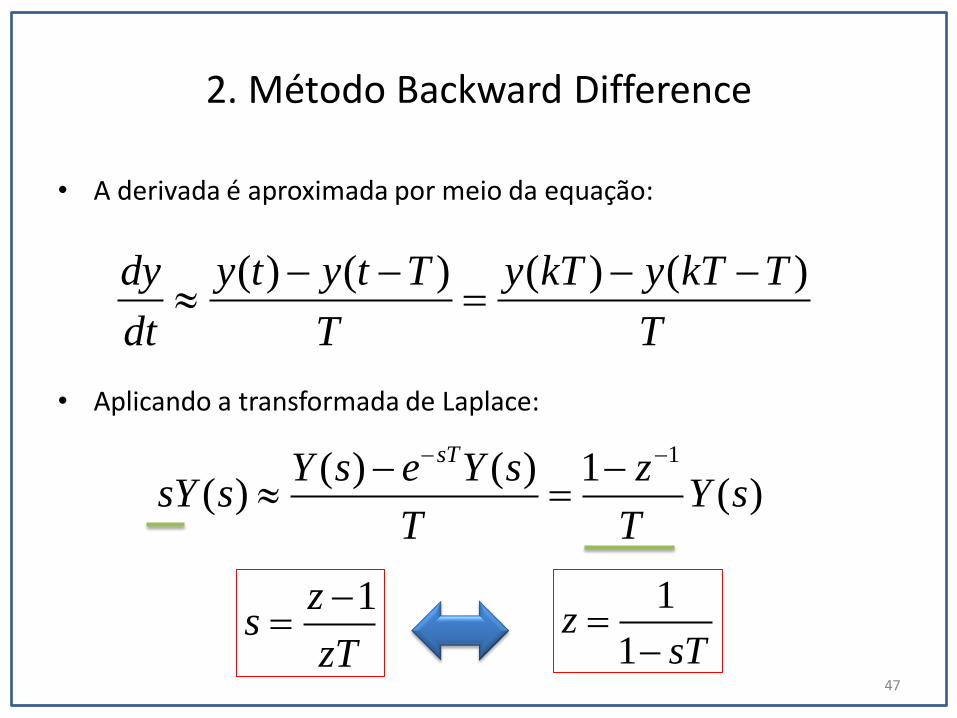
• A derivada é aproximada por meio da equação:
• Aplicando a transformada de Laplace:
47
( ) ( ) ( ) ( )dy y t y t T y kT y kT T
dt T T
1( ) ( ) 1( ) ( )
sTY s e Y s zsY s Y s
T T
1zs
zT
1
1z
sT
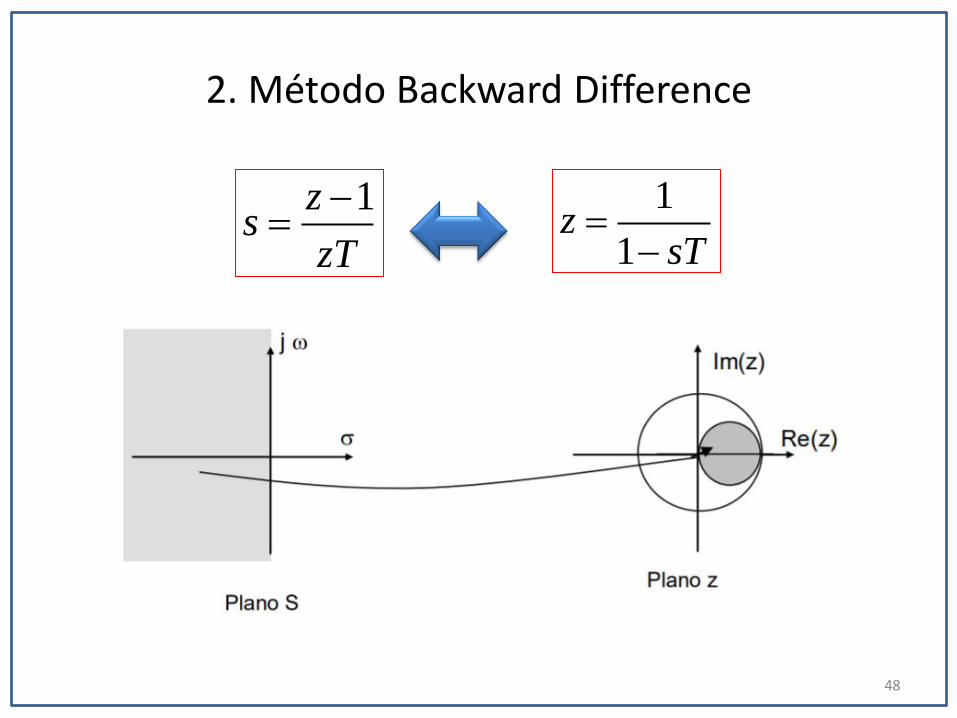
2. Método Backward Difference
48
1zs
zT
1
1z
sT
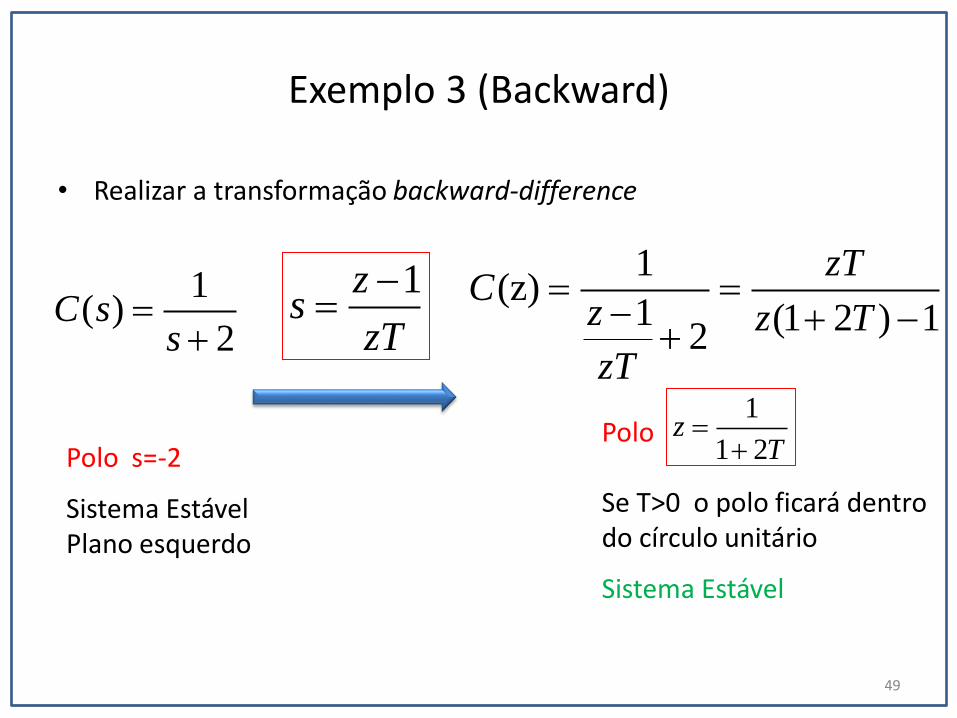
Exemplo 3 (Backward)
• Realizar a transformação backward-difference
49
1( )
2C s
s
1(z)
1 (1 2 ) 12
zTC
z z T
zT
Polo s=-2
Sistema Estável Plano esquerdo
Polo Se T>0 o polo ficará dentro do círculo unitário
Sistema Estável
1zs
zT
1
1 2z
T
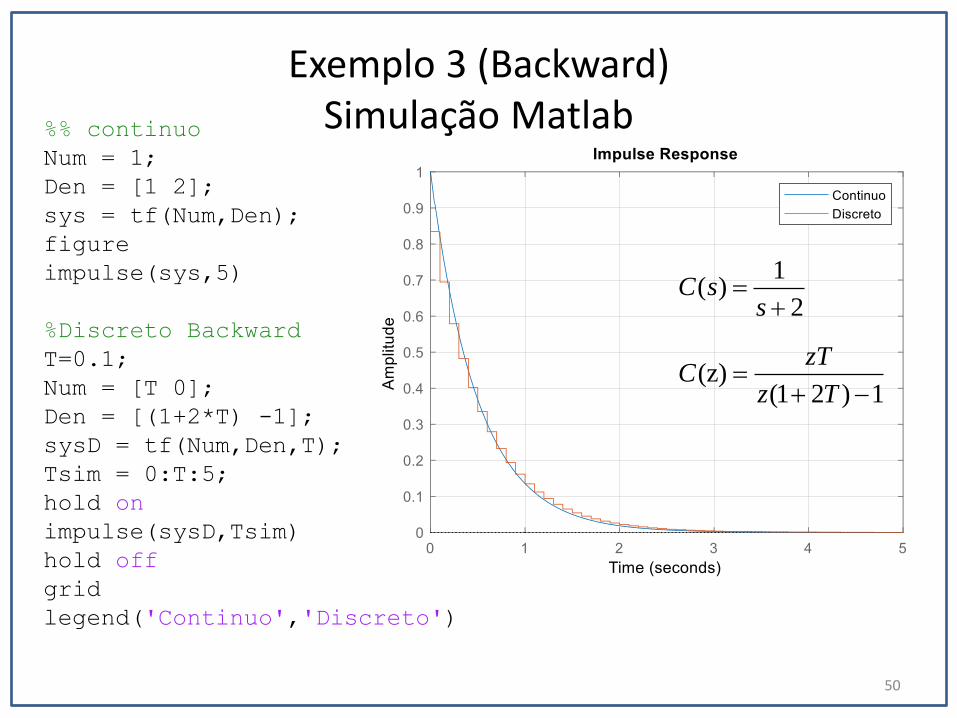
Exemplo 3 (Backward) Simulação Matlab
50
%% continuo
Num = 1;
Den = [1 2];
sys = tf(Num,Den);
figure
impulse(sys,5)
%Discreto Backward
T=0.1;
Num = [T 0];
Den = [(1+2*T) -1];
sysD = tf(Num,Den,T);
Tsim = 0:T:5;
hold on
impulse(sysD,Tsim)
hold off
grid
legend('Continuo','Discreto')
1( )
2C s
s
(z)(1 2 ) 1
zTC
z T
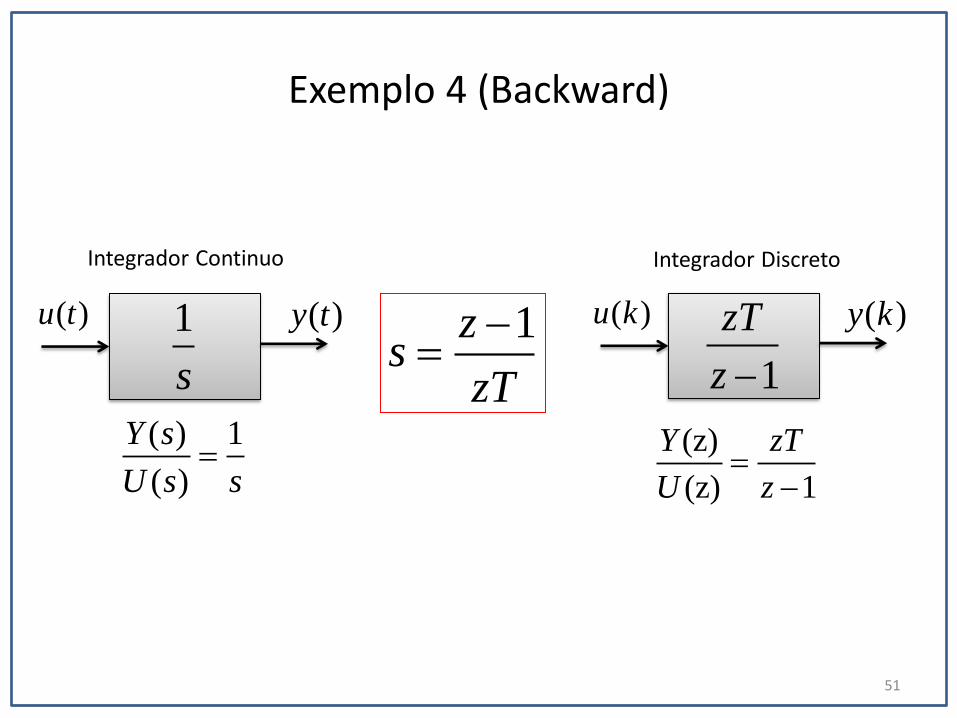
Exemplo 4 (Backward)
51
( )y t1
s
( )u t
( ) 1
( )
Y s
U s s
( )y k
1
zT
z
( )u k
(z)
(z) 1
Y zT
U z
Integrador Continuo Integrador Discreto
1zs
zT

Exemplo 4 (Backward)
• Para o Integrador
52
( ) ( )
t
t T
y t u t dt
( )
( ) ( )( )
( ) ( 1)( )
( ) ( 1) ( )
dyu t
dt
y t y t Tu t
T
y k y ku k
T
y k y k Tu k
Aproximação retangular
Área Retangular
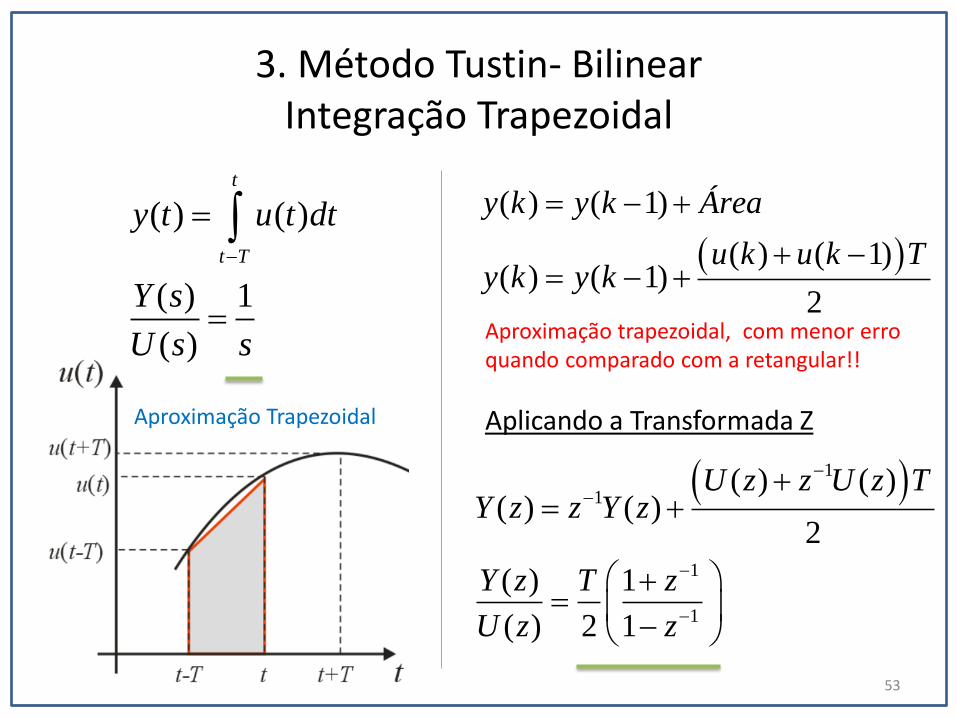
3. Método Tustin- Bilinear Integração Trapezoidal
53
( ) ( 1)
( ) ( 1)( ) ( 1)
2
y k y k Área
u k u k Ty k y k
( ) ( )
( ) 1
( )
t
t T
y t u t dt
Y s
U s s
Aproximação Trapezoidal Aplicando a Transformada Z
1
1
1
1
( ) ( )( ) ( )
2
( ) 1
( ) 2 1
U z z U z TY z z Y z
Y z T z
U z z
Aproximação trapezoidal, com menor erro quando comparado com a retangular!!

3. Método Tustin- Bilinear Integração Trapezoidal
54
( )y t1
s
( )u t
( ) 1
( )
Y s
U s s
( )y k1
1
1
2 1
T z
z
( )u k
1
1
(z) 1
(z) 2 1
Y T z
U z
Integrador Continuo Integrador Discreto
1
1
2 1
1
zs
T z
2 1
1
zs
T z
12
12
sT
zsT

3. Método Tustin- Bilinear Integração Trapezoidal
55
2 1
1
zs
T z
12
12
sT
zsT

Frequência de Amostragem
• Uma regra geral utilizada para determinar o tempo de amostragem é utilizar de 8 a 10 vezes a saída do sistema em malha fechada durante um ciclo de oscilação senoidal amortecida, considerando sistemas subamortecidos.
56
10
2
1
s
d
s sampling
sampling
sampling
f
Tf

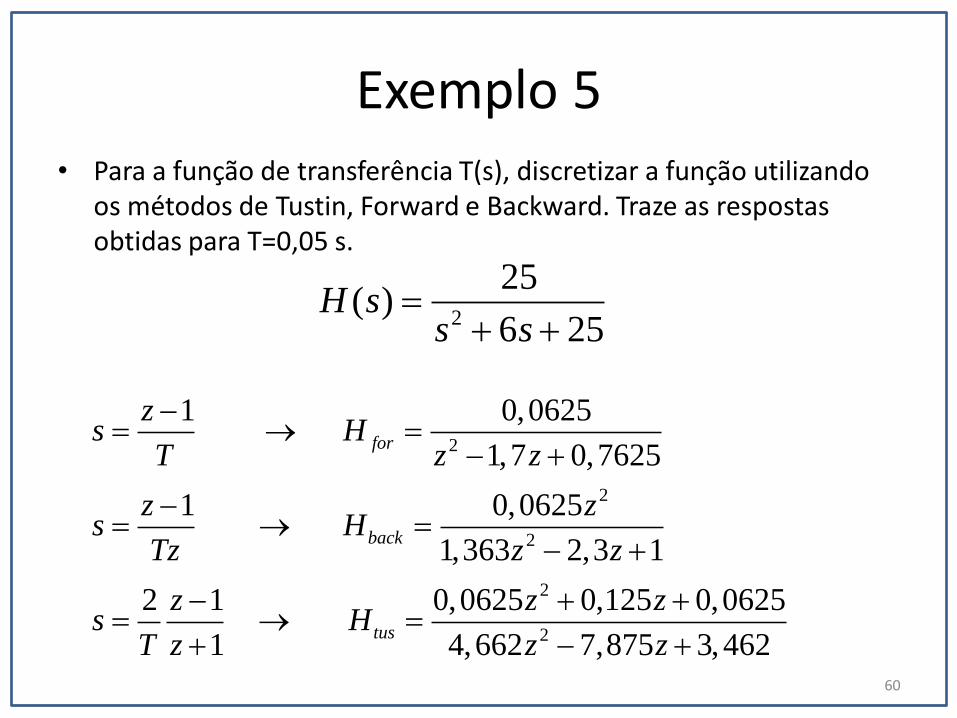
Exemplo 5 • Para a função de transferência T(s), discretizar a função de
transferência utilizando os métodos de Tustin, Forward e Backward. Traze as respostas obtidas para T=0,05 s.
57
2
25( )
6 25H s
s s
Avaliar se esta correta a frequência de amostragem?

Exemplo 5
58
2
25( )
6 25H s
s s
%Continuo
Num = 25;
Den = [1 6 25];
Hc =
tf(Num,Den);
figure
bode(Hc)
grid
Resposta em frequência do sistema

Exemplo 5
59
Considerando-se que o sistema tem uma resposta em frequência máxima de max=5,8 rad/s
2
2 5,8 11,6 /
2 11,6
11,61,84
2
11,84 0,54
sampling
sampling
sampling
sampling
sampling
sampling
BW
rad s
f
f
TT
0,05 !samplingT s está correto
2
25( )
6 25H s
s s
Exemplo 5 • Para a função de transferência T(s), discretizar a função utilizando
os métodos de Tustin, Forward e Backward. Traze as respostas obtidas para T=0,05 s.
60
2
25( )
6 25H s
s s
2
2
2
2
2
1 0,0625
1,7 0,7625
1 0,0625
1,363 2,3 1
2 1 0,0625 0,125 0,0625
1 4,662 7,875 3,462
for
back
tus
zs H
T z z
z zs H
Tz z z
z z zs H
T z z z

61
Tsampling = 0,05 s
62
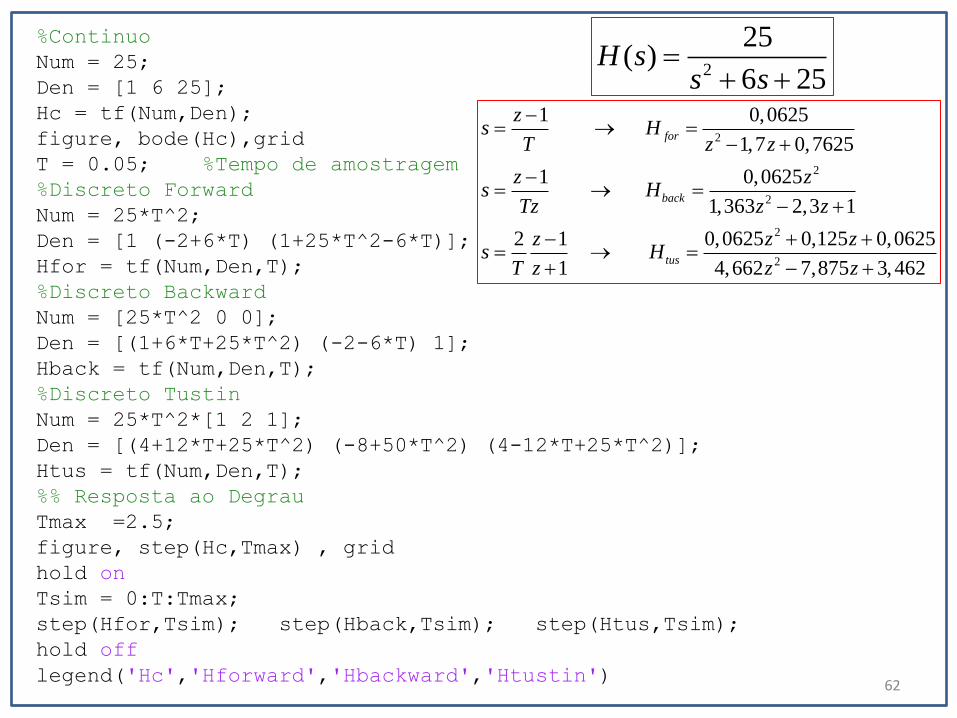
%Continuo
Num = 25;
Den = [1 6 25];
Hc = tf(Num,Den);
figure, bode(Hc),grid
T = 0.05; %Tempo de amostragem
%Discreto Forward
Num = 25*T^2;
Den = [1 (-2+6*T) (1+25*T^2-6*T)];
Hfor = tf(Num,Den,T);
%Discreto Backward
Num = [25*T^2 0 0];
Den = [(1+6*T+25*T^2) (-2-6*T) 1];
Hback = tf(Num,Den,T);
%Discreto Tustin
Num = 25*T^2*[1 2 1];
Den = [(4+12*T+25*T^2) (-8+50*T^2) (4-12*T+25*T^2)];
Htus = tf(Num,Den,T);
%% Resposta ao Degrau
Tmax =2.5;
figure, step(Hc,Tmax) , grid
hold on
Tsim = 0:T:Tmax;
step(Hfor,Tsim); step(Hback,Tsim); step(Htus,Tsim);
hold off
legend('Hc','Hforward','Hbackward','Htustin')
2
2
2
2
2
1 0,0625
1,7 0,7625
1 0,0625
1,363 2,3 1
2 1 0,0625 0,125 0,0625
1 4,662 7,875 3, 462
for
back
tus
zs H
T z z
z zs H
Tz z z
z z zs H
T z z z
2
25( )
6 25H s
s s
Observações sobre Métodos de Discretização
• Quanto maior a fsampling, maior a equivalência entre os métodos e maior a aproximação entre os sistemas contínuos e discretos.
• Caso a estabilidade seja uma especificação critica do projeto, não utilizar o método de discretização forward.
• Caso as especificações da fsampling são criticas, deve ser utilizado o método de discretização Tustin e mapeamento casado Polo-Zero, pois produze menos distorção.
63
Ferramentas Complementares
64
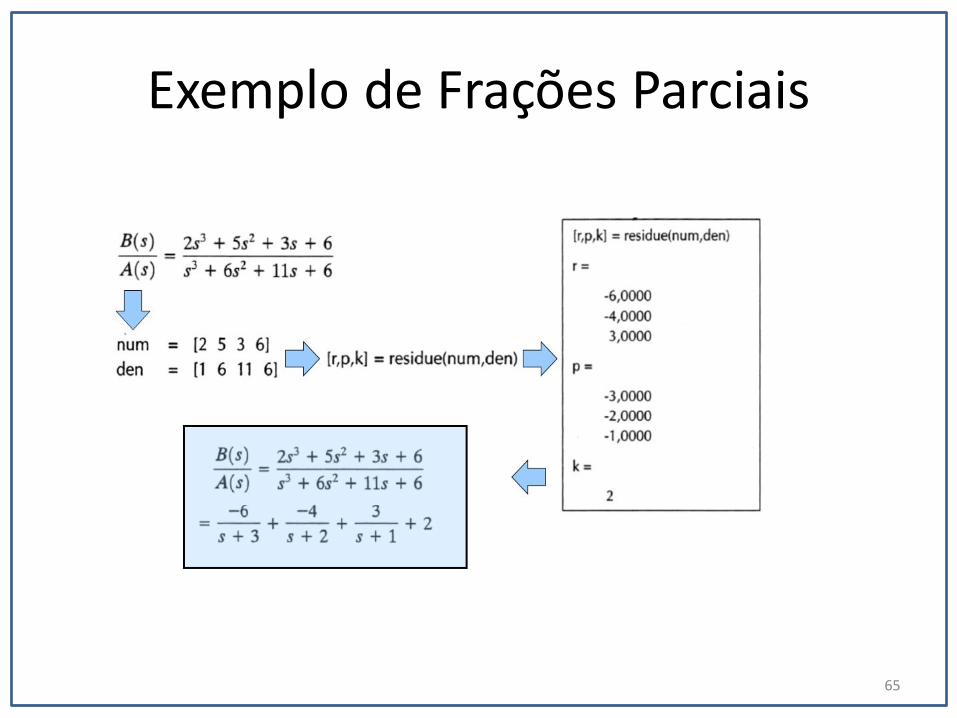
Exemplo de Frações Parciais
65

66