Relatório Final - Projeto Fapesp - Uso de Piezoelétricos para Flow Control

of 34
-
Upload
willdner9116 -
Category
Documents
-
view
162 -
download
0
Transcript of Relatório Final - Projeto Fapesp - Uso de Piezoelétricos para Flow Control
1
Sumrio1 2 INTRODUO ........................................................................................................................................... 3 REVISO DA LITERATURA ......................................................................................................................... 4 2.1 2.2 MATERIAIS PIEZELTRICOS ............................................................................................................... 4 CONTROLE DE ESCOAMENTO .......................................................................................................... 6
2.2.1 TIPOS ........................................................................................................................................... 7 2.3 USO DE PIEZELTRICOS PARA CONTROLE DE CAMADA LIMITE ....................................................... 9
2.3.1 PRINCIPIO DE FUNCIONAMENTO ................................................................................................ 9 2.3.2 PARMETROS DE ESTUDO ........................................................................................................ 10 2.3.3 PESQUISAS ANTERIORES E RESULTADOS OBTIDOS................................................................... 11 3 CONSTRUO DO MODELO PREVIAMENTE UTILIZADO ........................................................................ 14 3.1 4 CONSTRUO DO MODELO ........................................................................................................... 14
REVISO DOS RESULTADOS OBTIDOS AT A FASE PRELIMINAR DO PROJETO ...................................... 16 4.1 4.2 4.3 DETERMINAO DA FRF DA VIGA .................................................................................................. 16 ENSAIOS DE VISUALIZAO AERODINMICA ................................................................................ 17 REVISO DA PROPOSTA PARA A SEGUNDA FASE .......................................................................... 20
5 6
ANLISE PRELIMINAR DO EFEITO DE NGULO DE FLAPE E TENSO DE OPERAO ............................. 20 ENSAIOS EM TNEL DE VENTO COM BALANA AERODINMICA.......................................................... 21 6.1 6.2 6.3 6.4 MONTAGEM DO EXPERIMENTO .................................................................................................... 22 DADOS ATMOSFRICOS E FRMULAS UTILIZADAS ....................................................................... 24 EFEITO DA FREQUENCIA DO SINAL ................................................................................................ 24 RESULTADOS E ANLISE DOS DADOS AERODINAMICOS ............................................................... 25
7
POSSIBILIDADE DE NOVAS MEDIES E MELHORIA DO SISTEMA ......................................................... 29 7.1 7.2 7.3 7.4 CONSTRUO DE UMA ASA COM ATUADORES EM TODA A ENVERGADURA ............................... 29 ENSAIOS COM ATUADORES ATUANDO EM DEFASAGEM .............................................................. 30 ESTUDO DO GAP ENTRE ATUADOR E FLAPE .................................................................................. 30 ESTUDO DO TAMANHO DA CAVIDADE ABAIXO DO ATUADOR...................................................... 31
8 9
CONCLUSO ........................................................................................................................................... 31 BIBLIOGRAFIA ......................................................................................................................................... 32
2
Lista de SmbolosEspessura da camada limite; ngulo de flape Densidade do ar no escoamento livre Acrscimo de quantidade de movimento mdia adimensional Amplitude mxima de oscilao Amplitude de oscilao adimensional Active Fiber Composites ngulo de ataque Mdulo de elasticidade do material Frequncia de oscilao do atuador Frequncia natural de oscilao da viga Frequncia de oscilao adimensional Momento de inrcia da viga Rigidez equivalente da viga Comprimento da viga Comprimento de referncia Massa da viga Macro Fiber Composites Velocidade do escoamento Velocidade do escoamento livre Distncia entre o atuador e o bordo de ataque do perfil
3
RESUMOO controle do escoamento uma das formas para se possibilitar o atraso da separao do escoamento em aeroflios. A excitao peridica da camada limite uma das formas para o controle de escoamento. Neste trabalho, a excitao peridica ser induzida por vigas na condio de contorno livre-engastadas atuadas com atuadores piezeltricos compsitos (MFCs) e distribudas sobre uma asa. Verifica-se na literatura que a frequncia tima de atuao relacionada a caractersticas geomtricas do sistema (asa e atuadores) e tambm caractersticas do escoamento. Os atuadores eletromecnicos (vigas eletromecnicas) sero ento projetados de forma a maximizar o rendimento do sistema. Assim, suas caractersticas dinmicas (frequncias naturais e modos de vibrar) tero que ser adequadas s condies timas de atuao para o controle de escoamento. Estas caractersticas sero verificas experimentalmente. O efeito do controle de escoamento, e um estudo sobre a influncia de parmetros envolvidos, sero investigados em testes aerodinmicos em tnel de vento. Na primeira etapa deste projeto de pesquisa, os atuadores foram projetados e testados (levantamento de frequncias de ressonncia), uma asa com uma superfcie de comando e com uma cavidade para instalao dos atuadores foi projetada e fabricada. Ensaios qualitativos de visualizao aerodinmica foram realizados com sucesso em tnel de vento. Na segunda etapa, testes quantitativos foram feitos em tnel de vento com a medio de foras utilizando uma balana aerodinmica, determinando assim, o efeito do controle de escoamento sobre o comportamento aerodinmico.
1
INTRODUOA engenharia aeronutica, como qualquer outra cincia, passa por constante evoluo. A cada nova
pesquisa, novas tecnologias e novos conceitos so investigados visando melhorias nas aeronaves. Uma das principais preocupaes neste ramo da engenharia a diminuio do consumo de combustvel e, como consequncia deste fato, a reduo da poluio gerada, aumento do alcance e peso carregado, alm da diminuio do custo de operao. A obteno de tal melhoria fortemente relacionada com evolues aerodinmicas da aeronave, principalmente quanto ao aumento da eficincia aerodinmica (relao sustentao/arrasto). Visando esta melhora, grande parte do oramento de novos projetos utilizado para desenvolver novos dispositivos hipersustentadores, pontas de asa ou novos perfis aerodinmicos. No entanto, um grande problema recorrente e que dificulta um grande salto nesta eficincia o problema da separao da camada limite. Ao aumentar o ngulo de ataque de uma aeronave aumentamos sua sustentao. Aps determinado ponto, o escoamento se descola da superfcie gerando uma diminuio da sustentao e rpido aumento de arrasto, o chamado estol (Anderson [1]). O controle do escoamento uma tcnica que poder garantir uma recuperao aerodinmica (aumento de sustentao e diminuio do arrasto) na condio de ps-estol. Para isso diversas tcnicas so estudadas com a motivao de retardar o gradiente adverso de presso na camada limite, atrasando, portanto, seu descolamento da superfcie. A excitao peridica da camada limite para o controle de escoamento uma dessas tcnicas e pode ser realizada de diferentes maneiras (Dolle [2]). Uma das maneiras de realizar este controle usando atuadores piezeltricos distribudos em regies especficas de uma asa para a excitao do escoamento, objeto de investigao deste projeto. O objetivo, portanto, investigar experimentalmente o controle de escoamento em um aeroflio utilizando atuadores piezeltricos. Os atuadores sero pequenas vigas metlicas na condio engastada-livre,
4 cobertas com um atuador piezeltrico compsito, conhecido como MFC (Macro Fiber Composite) e distribudas ao longo de uma seo do aeroflio. conhecido na literatura que a frequncia tima de atuao relacionada com a velocidade do escoamento e distncia do atuador ao bordo de fuga do aeroflio (Wygnanski [3]). Na primeira fase do projeto um modelo de asa flapeada com atuadores piezeltricos em seu extradorso foi projetado e fabricado . Os atuadores foram posicionados no bordo de fuga do elemento principal, logo antes do flape. Com isso alguns ensaios foram conduzidos a fim de determinar o comportamento dinmico destes atuadores (Funes Resposta em Frequncia), alm de ensaios aerodinmicos de visualizao em tnel de vento. Nesta segunda fase foram realizados novos testes em tnel de vento e medio de foras utilizando uma balana aerodinmica. O objetivo tentar quantificar o aumento de desempenho proporcionado pelos atuadores eletromecnicos utilizados para o controle de escoamento. Alm disso, verificou-se a condio tima para mxima eficincia do sistema (aeroflio e atuadores) em funo da frequncia de excitao dos piezeltricos e a amplitude da tenso de entrada aplicada nestes atuadores.
2
REVISO DA LITERATURAO princpio de funcionamento de materiais piezeltricos e qual tipo melhor se aplica ao caso estudado
ser discutido neste item. Alm disso, algumas formas de controle de escoamento presentes na literatura sero discutidas. Finalmente, o princpio de funcionamento do controle de escoamento com o uso de piezeltricos ser apresentado e alguns resultados anteriormente apresentados na literatura sero discutidos.
2.1
MATERIAIS PIEZELTRICOSA histria da piezeletricidade data de 1880, quando os irmos Curie descobriram este efeito em diversas
substncias. O efeito piezeltrico direto consiste na gerao de carga eltrica quando uma deformao mecnica imposta a uma substncia ou material. O efeito reverso consiste na deformao mecnica a partir da aplicao de uma carga eltrica. Em resumo, o efeito piezeltrico pode ser considerado como o acoplamento entre os domnios eltrico e mecnico (Inman e Cudney [4]). Os materiais piezeltricos so um dos tipos de materiais inteligentes. Outros materiais que podem possuir outros efeitos, como a eletro e magnetoestrico e memria de forma tambm so classificados como materiais inteligentes. As cermicas piezeltricas modernas, como o PZT e o PMN, apresentam caractersticas que as destacam para utilizao em controle estrutural e como sensores. Apesar das deformaes induzidas serem relativamente pequenas (em torno de 0,1%), a tenso mecnica gerada pode ser grande, resultando em alta densidade energtica. Os tempos de resposta so pequenos, permitindo atuao em altas frequncias. Apresentam tambm alta sensibilidade a deformaes mecnicas, habilitando-os a serem utilizados como sensores (Lloyd [5]). As placas piezocermicas e as fibras piezeltricas em compsito so dois tipos de materiais piezeltricos que sero aqui destacados. a. Piezocermicas monolticas: So geralmente apresentadas na forma de elementos tipo sanduche (ou multicamadas) ou pastilhas monolticas. O termo monoltico refere-se a um pedao nico e contnuo de cermica, livre de adio de outros
5 materiais ou componentes estruturais (Lloyd [5]). As aplicaes em controle de estruturas, como sensores ou supressores de vibraes, tipicamente apresentam atuao ou sensoriamento no plano (in-plane) da pastilha. Contudo, o campo eltrico aplicado nessas pastilhas normal ao plano da mesma (out-of-plane). Como consequncia dessa atuao ou sensoriamento no plano e do campo eltrico aplicado no plano normal, as cermicas operam no conhecido modo d31, limitando a possibilidade de uso completo do seu acoplamento eletromecnico. O modo d31, com densidade energtica e deformao mecnica gerada limitadas, sendo menos eficiente que o modo d33, onde o campo eltrico aplicado na mesma direo da deformao gerada. Assim, a fragilidade mecnica das cermicas e seu modo de operao limitam sua utilizao. Existe, ainda, a dificuldade de instrumentao de superfcies irregulares devido elevada rigidez dessas pastilhas monolticas. b. Fibras piezeltricas em compsito: Esses compsitos consistem de fibras de PZT depositadas em uma matriz polimrica. Entre os benefcios das fibras ativas, destacam-se a possibilidade do uso do modo mais eficiente d33 de acoplamento eletromecnico, maior robustez, maior flexibilidade e a habilidade de ajuste e adaptao da direo de atuao e sensoriamento (Schultz [6]). O uso desse material compsito piezeltrico apresenta vantagens, se comparado com as cermicas monolticas (Hagood e Bent [7]). Tipicamente, materiais cristalinos, quando na forma de fibras, apresentam tenses muito maiores. As fibras podem ser mais finas e menos rgidas que as cermicas monolticas, j que estaro depositadas em um polmero e laminadas juntamente com outras camadas flexveis. As fibras ativas piezeltricas ou fibras piezeltricas em compsito so apresentadas como MFC (Macro Fiber Composites) e AFC (Active Fiber Composites). As AFCs foram desenvolvidas no MIT e so compostas pela combinao de materiais ativos e no ativos em uma estrutura especfica, formando o atuador ou sensor. Fibras circulares de cermicas piezeltricas so injetadas e depositadas unidirecionalmente em uma matriz epxi, protegendo-as de choques e conferindo ao conjunto a flexibilidade da matriz. O uso de uma nova configurao de eletrodos (interdigitated electrodes IDE) possibilitou a obteno de campos eltricos paralelos direo de polarizao das fibras, resultando no efeito d33 e dobrando a deformao obtida em relao s cermicas piezeltricas. Os MFCs foram desenvolvidos na NASA. Seu funcionamento e composio so semelhantes ao das AFCs. Porm, as suas fibras so obtidas com corte de cermicas piezeltricas comerciais (um processo mais simples e barato que dos AFCs), resultando em sees transversais retangulares. A Figura 1 apresenta uma vista explodida das camadas de um MFC, onde as fibras retangulares de PZT esto alinhadas na direo 1 e os eletrodos IDE paralelos direo 2.
Figura 1: esquerda, verifica-se a flexibilidade do MFC. direita, as camadas que compe o atuador
6 Vale destacar que as fibras de PZT so polarizadas ao longo de seu plano, ou longitudinalmente. Os eletrodos IDE criam campos eltricos na mesma direo possibilitando o uso do efeito piezeltrico d33, mais eficiente que o d31 utilizado por PZTs tradicionais. As fibras retangulares promovem uma maior rea de contato entre a fibra ativa e o eletrodo, garantindo a melhor interao entre o campo eltrico e as fibras. Na indstria aeronutica estes materiais inteligentes j so encontrados em algumas aplicaes. Uma das mais comuns seu uso para simples medies, como em acelermetros ou strain-gauges, o primeiro utilizado em aeronaves para medir seu movimento e, consequentemente, usar estes dados para controle automtico, e o segundo para medir deformaes, utilizado em ensaios estruturais ou mesmo em balanas aerodinmicas. No entanto, um dos conceitos mais promissores para estes materiais no conceito de morphing wings. O objetivo destes estudos superfcies de sustentao que possam modificar sua forma (arqueamento do perfil, por exemplo) durante o voo, sem usar atuadores mecnicos ou hidrulicos, simplesmente deformando a superfcie a partir de atuadores piezeltricos. Isto conferiria mais leveza ao sistema, j que no seriam necessrios pesados sistemas para atuar os flaps, por exemplo. Alm disso, proporciona maior limpeza aerodinmica j que o sistema piezeltrico pode ser mesmo colocado por dentro da asa, evitando a exposio dos atuadores hidrulicos que podem gerar grande arrasto.
Figura 2: Um perfil deformado por um atuador piezeltrico em um estudo da Lockheed Martin
2.2
CONTROLE DE ESCOAMENTOEm uma aeronave um dos grandes objetivos maximizar a eficincia aerodinmica, ou seja, maximizar a
sustentao e minimizar as perdas por arrasto em variadas condies de voo. Em busca deste objetivo muitas formas j foram estudadas e uma delas possibilitar o controle do escoamento em um aeroflio. Este termo controle de escoamento, em resumo, trata-se de retardar o estol da superfcie e para isto, diminuir o gradiente adverso de presso sobre o extradorso. Para entender a formao deste gradiente, antes necessrio analisar a distribuio de presses sobre um aeroflio, como vemos na figura abaixo:
7
Figura 3: Distribuio tpica de presses ao longo do perfil
No grfico podemos notar que a partir de cerca de 10% do perfil a presso comea a aumentar (note que o eixo y est invertido). Este aumento de presso, quando caminhamos para a direita, o chamado gradiente adverso de presso. Este gradiente adverso, por ter uma presso maior a frente do escoamento gera uma fora contrria ao mesmo. Esta fora, por sua vez faz com que parte do perfil de velocidades sobre a superfcie possa ter uma velocidade negativa, gerando ento um vrtice e descolando o escoamento da superfcie. Podemos ver este processo melhor ilustrado na Figura 4. Nela podemos observar o aumento de presso ao longo do caminho e a gerao do fluxo reverso.
Figura 4: Aumento de presso ao longo do escoamento e surgimento do fluxo reverso (Anderson [1]).
Esses vrtices gerados aps o surgimento deste fluxo reverso trazem um grande incremento de arrasto da superfcie, alm da perda de sustentao, o chamado estol. Desta maneira, controlar o surgimento deste fluxo reverso de extrema importncia para aumentar a eficincia aerodinmica. Os estudos de controle de escoamento comearam j em 1904 com Ludwig Prandtl e desde ento esta uma cincia muito estudada e em constante evoluo. A seguir veremos alguns tipos de controle de escoamento e onde eles j so aplicados no ramo da engenharia aeronutica. 2.2.1 TIPOS Podemos separar as formas de controle de escoamento em dois tipos: os de controle ativo e controle passivo. O controle passivo no requer uma fonte de energia externa para ser realizado, ou seja, no possui atuadores ativos. Assim, so sistemas mais simples, porm menos versteis, j que no se tem a possibilidade de quando ativar ou no o sistema. Em geral, eles tm um ponto timo de operao em uma condio especfica. O sistema ativo, por sua vez, necessita de uma fonte externa de energia, no entanto isso possibilita o controle do
8 atuador, realizando o controle para diferentes fases do voo. Dentre as formas de controle passivo podemos destacar os geradores de vrtices e slots (Dolle [2]). Os geradores de vrtices, como o nome nos diz, so pequenas aletas no extradorso da asa que geram pequenos vrtices. Esses vrtices energizam a camada limite, deixando-a mais resistente ao gradiente adverso de presso. Apresenta-se na Figura 5 o efeito da incluso destes elementos sobre o escoamento.
Figura 5: Funcionamento dos geradores de vrtice
J os slots e flaps usam o escoamento do intradorso de uma superfcie para energizar a camada limite no extradorso da superfcie adjacente. Este efeito retarda o descolamento, melhorando o desempenho do sistema em altos ngulos de ataque. Exemplifica-se o efeito na Figura 6.
Figura 6: Retardamento do estol com a ajuda de um slat[8]
J as formas de controle ativo ainda so um menos utilizadas, j que se so tecnologias em desenvolvimento e objetivo de pesquisas. Uma das maneiras mais usuais de se fazer este controle a suco da camada limite (NASA [9]). Sua eficincia tem sido comprovada em diversas publicaes, a maioria delas apresentadas na reviso de [11]. Um problema prtico desta tcnica o consumo de energia para a realizao da suco. Outro exemplo de controle ativo a aplicao de um jato tangencial superfcie (NASA [9]). Este jato tem o princpio de funcionamento semelhante ao do slat, que energizar a camada limite e retardar o escoamento adverso. Na Figura 7 podemos ver o funcionamento destas duas formas de controle.
9
Figura 7: Funcionamento da suco da camada limite e do sopro tangencial.
Por fim, podemos destacar duas formas utilizam a excitao peridica para o controle. Estes tipos de controle demonstram-se mais otimizados energicamente, ou seja, necessitam de menos energia para realizar o mesmo efeito das outras atuaes ativas. Um deles a excitao acstica, que usa ondas sonoras para excitar e energizar a camada limite, o outro excitar a camada limite com um pequeno atuador ativo, que veremos com mais detalhes a seguir.
2.3
USO DE PIEZELTRICOS PARA CONTROLE DE CAMADA LIMITE2.3.1 PRINCIPIO DE FUNCIONAMENTO Em geral, sistemas de controle de camada limite so baseados na adio de quantidade de movimento ao
escoamento, energizando, assim, a camada limite e atrasando seu descolamento. Tendo isso em vista, uma maneira vislumbrada de adicionar esta quantidade de movimento ao fluxo excitando uma viga eletromecanicamente acoplada em alguma regio crtica do escoamento. Este atuador eletromecnico poderia ento retardar o descolamento da camada limite, garantindo melhores caractersticas ao escoamento, como aumentar o coeficiente de sustentao mximo de um perfil aerodinmico, possibilitar maiores ngulos de flape em uma asa e garantir maiores ngulos de inclinao na geometria de difusores. O funcionamento do sistema pode ser visto na Figura 8. A superfcie, ao subir, gera um vrtice. Quando esta superfcie desce, o vrtice empurrado para frente, onde ele encontra a camada limite, energizando-a. Desta maneira a camada limite torna-se mais resistente ao gradiente adverso de presso, retardando seu descolamento (Dolle [2]).
Figura 8: Esquema de criao de vrtice da aleta oscilatria (Dolle [2]).
Abaixo podemos ver outros dois tipos diferentes deste chamado fliperon (Collis et al. [14]). O primeiro deles um atuador convencional, tangente superfcie. J o segundo um atuador encontrado acima de uma cavidade. Isto permite uma maior oscilao do fliperon, podendo gerar maiores vrtices. Entretanto, importante
10 destacar que o mecanismo envolvido em ambos os casos ainda objeto de investigaes.
Figura 9: Atuadores usados para controle do fluxo em superfcies planas ou com cavidades (Collis et al. [14])
Este fliperon pode ainda ser aplicado para melhorar o funcionamento de flaps. Na Figura 10 podemos ver um exemplo de aplicao na ligao entre o flap e o perfil. Isto tambm retarda o estol e permite maiores ngulos de deflexo do flap, aumentando, consequentemente, o coeficiente de sustentao da superfcie.
Figura 10: Um fliperon aplicado na juno entre perfil e flap
Este fliperon, por sua vez, pode ter seu funcionamento baseado em diversas tcnicas. A utilizao de atuadores piezeltricos comea a ser investigada na literatura. Uma das vantagens desta forma de atuao a possibilidade de uso em uma ampla faixa de frequncias (o que pode conferir boa caracterstica da adaptabilidade ao sistema) e tambm possibilidade de se atingir grandes amplitudes com o uso dos MFCs. 2.3.2 PARMETROS DE ESTUDO A viga eletromecnica engastada (ou atuador do sistema para controle de escoamento) possui, primordialmente, dois parmetros variveis. O primeiro deles a frequncia natural de seus modos de vibrar (e vale destacar aqui que o primeiro modo o de interesse) e o segundo a amplitude do movimento. Estas duas variveis so de fundamental importncia para a investigao do sistema, j que elas tm grande interferncia na quantidade de movimento inserida na camada limite. Estes parmetros, alm de comparar dois tipos de configuraes que usam o fliperon podem ser teis para comparar os resultados deste tipo com outros tipos de controle de camada limite, como o sopro tangencial ou a excitao acstica. a. Frequncia Adimensional O primeiro parmetro a ser adimensionalizado a frequncia de atuao. A importncia desta adimensionalizao que o efeito da frequncia depende da posio do sistema atuador e da velocidade do escoamento, logo, com estes dois fatores que devemos fazer a transformao no parmetro de estudo, definido por Wygnanski [3]:(1)
11 b. Quantidade de Movimento Adimensional Outro parmetro comparativo a quantidade de movimento adicionada pelo atuador eletromecnico. Esta grandeza importante ser quantificada j que um grande fator comparativo com outros mtodos de controle de camada limite, como, por exemplo, o jato tangencial. No entanto, a medida desta grandeza no jato tangencial bem simples, sendo quantificada apenas a velocidade de sada do fluxo e a rea de sada. No entanto, para o fliperon esta grandeza torna-se um pouco mais complicada de ser avaliada. A ideia proposta em literatura a medio da variao de velocidade adjacente superfcie a uma determinada distancia do atuador, que definida como 1% da corda do perfil. Ou seja, a esta distncia devemos medir a variao do gradiente de velocidades paralela superfcie quando o atuador oscila ou no, para assim determinar esta variao da quantidade de movimento. Abaixo temos a equao que rege a adimensionalizao desta grandeza. A integral representa a medida de variao de velocidade por todo o gradiente (integrao at o infinito). J os outros termos so necessrios para parametrizar esta integral do gradiente em relao velocidade do fluxo e ao comprimento padro do corpo (valor da corda quando considerado perfis aerodinmicos):(2)
c. Amplitude de Vibrao Adimensional Por fim, o ltimo parmetro trata da amplitude de vibrao do atuador. A interferncia desta amplitude depende do tamanho da camada limite do perfil. Imaginemos que esta amplitude seja metade da espessura da camada limite, logo sua regio de interferncia no gradiente adverso de presso ser menor que a interferncia gerada, por exemplo, de uma amplitude que igual espessura da camada limite. Abaixo temos a equao desta amplitude adimensional proposta por Dolle [2]:(3)
2.3.3 PESQUISAS ANTERIORES E RESULTADOS OBTIDOS Alguns estudos j foram realizados nesta linha de pesquisa e comprovaram a eficincia deste mtodo de controle da camada limite. No entanto, muito ainda pode ser feito, como otimizar o gasto de energia do atuador, variando sua posio, frequncia e amplitude de atuao e geometria, rigidez e massa do atuador, que pode ajudar na economia de energia. Abaixo podemos ver um exemplo visual do escoamento com e sem atuao. Ambas as imagens so de um mesmo perfil, em um mesmo ngulo de ataque e um mesmo nmero de Reynolds (Wygnanski [3]). Podemos ver claramente que na primeira imagem, sem atuao do fliperon, o fluxo j est totalmente descolado da superfcie, ou seja, o perfil j est totalmente estolado. J na segunda foto, agora com a atuao do sistema, o fluxo permanece colado superfcie, o que nos garante um maior coeficiente de sustentao e menor arrasto.
12
Figura 11: Um perfil NACA 0015 sem excitao (a) e excitado com um atuador prximo ao bordo de ataque (b) (Wygnanski [3])
Outro exemplo a mudana do gradiente de velocidades na camada limite. Na Figura 12 podemos ver a variao deste gradiente com a mudana de excitao. A linha continua representa o gradiente sem excitao, a linha tracejada sendo controlada por um jato tangencial, e a pontilhada por um controle misto, de jato e oscilao (Bachar [12]). Podemos ver claramente que o gradiente de velocidade dos aeroflios que possuem controle menos adverso que o gradiente do aeroflio base. Isso garante caractersticas de retardao de estol e melhora da eficincia aerodinmica.
Figura 12: Variao do perfil de velocidades na camada limite com e sem controle ativo de camada limite (Bachar [12])
Podemos analisar tambm alguns resultados numricos desta atuao. No grfico da Figura 43 podemos observar a variao do coeficiente de sustentao em funo do coeficiente de arrasto somado ao coeficiente de adio de quantidade de movimento. A anlise feita com essa soma ( ) importante, pois ela nos fornece uma ideia da energia gasta
para atuar o sistema, ou seja, caso essa energia seja muito grande, no vantajoso usar o sistema, j que o ganho inferior ao gasto. justamente o que se verifica no grfico abaixo. Trs condies podem ser analisadas. A primeira a linha base, onde no h atuao nenhuma (losangos brancos). A segunda com a atuao de sopro tangencial (quadrados negros) e a terceira a atuao de sopro tangencial e oscilao peridica (tringulos negros). Na condio em que somente o sopro tangencial utilizado tem-se um acrscimo da soma um mesmo , apesar de um acrscimo do para
mximo. J para a condio mista, quando comparamos a condio , alm de um acrscimo significativo do mximo.
constante, h uma grande diminuio da soma
13
Figura 13: Variao do coeficiente de sustentao em funo do coeficiente de arrasto para o perfil NACA 0015 com e sem excitao (Wygnanski [3])
Entretanto esses ganhos dependem muito dos coeficientes adimensionais definidos anteriormente, como pode se observar nos grficos da Figura 14 e da Figura 15. No primeiro h uma regio de em que o ganho de
sustentao mximo quando comparado ao perfil no excitado. J no segundo podemos ver que tambm h uma regio tima de cujo maior.
Figura 14: Variao do ganho de coeficiente de sustentao em funo da frequncia de excitao adimensional para o perfil NACA 0015 (Wygnanski [3])
Figura 15: Variao do coeficiente de sustentao mximo em funo do coeficiente adio de quantidade de movimento para o perfil NACA 0015 (Wygnanski [3])
Com a reviso apresentada, a ideia verificar inicialmente o comportamento do piezeltrico e sua resposta em funo da frequncia de oscilao. Alm disso, a investigao ser conduzida para avaliar a aplicabilidade do sistema na tentativa de melhorar o desempenho de um flape, posicionando-o logo antes da superfcie defletida. Assim, a investigao aqui proposta, alm de possibilitar ao aluno o contato com diversas reas da engenharia, dever propiciar ao grupo a experincia necessria na rea de controle de escoamento utilizando atuadores piezeltricos para futuras aplicaes que sero posteriormente discutidas.
14
3
CONSTRUO DO MODELO PREVIAMENTE UTILIZADOO modelo utilizado para os experimentos dessa fase o mesmo projetado e fabricado para a primeira
parte do projeto. Suas caractersticas geomtricas foram baseadas no comportamento timo dos atuadores, desejando manter a frequncia adimensional prximo a 1,2. Com isso determinamos as seguintes caractersticas; Perfil: NACA 0015, a fim de ter espessura suficiente para facilitar o posicionamento dos sistemas internos. Posio do flape: 30% da corda, valor comum para superfcies do tipo Corda: 0,2m, a fim de manter baixa interferncia com o tnel de vento Velocidade do tnel: 10m/s, para manter a frequncia adimensional em 1,2.
3.1
CONSTRUO DO MODELOO modelo foi construdo com uma estrutura nervurada, chapeado e entelado, com uma longarina de ao
a 25% da corda para ser fixado ao tnel de vento. As nervuras foram feitas de madeira compensada cortada a laser, o chapeado de madeira balsa e a entelagem com material prprio de aeromodelo. Os MFCs foram fixados em vigas de ao de espessura de 50m com cola DP-460 da 3M. Aps isso, cada conjunto deste foi colado em uma pequena barra de ao, como mostra a Figura 16. Apesar desta no ser uma condio ideal de engastamento, sua utilizao justificada devido a simplicidade construtiva. Alm disso, testes dinmicos mostraram o bom funcionamento do sistema.
Figura 16: Esquema de montagem da viga padro
Cinco conjuntos de atuadores eletromecnicos (viga engastada coberta com MFCs) foram fixados a uma barra de ao mvel, que parafusada a uma barra fixa no centro da asa. Na Figura 17 podemos ver o esquema de montagem da estrutura principal.
15
Barra Mvel
Barra Colada nas Nervuras
Figura 17: Esquema de montagem da estrutura principal
Foi ento feito um barramento com dois pares de fios, ligando-se alternadamente cada piezeltrico em um dos barramentos, deixando atuadores pares conectados a um, e impares conectados a outro. Isto permite que, em futuros ensaios, seja possvel atuar os piezos alternadamente com defasagem de 180. Abaixo vemos o esquemtico empregado no sistema eltrico:Vigas conectadas ao barramento 2 Vigas conectadas ao barramento 1
Dois pares de fios para alimentar os atuadores
Figura 18: Esquema da alimentao eltrica dos atuadores
O flap, tambm fabricado com uma estrutura nervurada, fixado ao elemento principal por rolamentos e uma longarina de fibra de carbono. Por fim, a estrutura toda chapeada com chapas de madeira balsa e depois recoberta por uma entelagem plstica, para assim garantir uma superfcie com o mnimo de imperfeies. Detalhes da configurao final so mostrados na Figura 19.
16
Figura 19: Fotos do modelo aps a construo
4
REVISO DOS RESULTADOS OBTIDOS DURANTE A PRIMEIRA FASE DO PROJETONa primeira etapa do projeto, alm da construo do modelo j apresentado, foram realizados ensaios
para determinar a resposta em frequncia do atuador, alm de uma primeira anlise do comportamento aerodinmico da superfcie. A seguir, apresentamos um resumo destes resultados, bem como uma reviso das propostas para esta fase do projeto.
4.1
DETERMINAO DA FRF DA VIGAA primeira etapa foi a determinao da funo de resposta em frequncia da viga (conjunto
piezeltrico+viga engastada de ao). A viga foi engastada em uma barra de ao que foi presa a uma base inercial. O sinal de entrada, voltagem na forma de uma varredura senoidal, foi aplicado ao MFC. Como este tipo de atuador requer alta voltagem de entrada, um amplificador de alta voltagem Trek foi utilizado para amplificar o sinal gerador no analisador espectral (Photon II). A velocidade dos movimentos na ponta da viga foi com o vibrmetro laser PDV-100 da marca Polytec. Engaste de ao
Ponto de medio a laserFigura 20: Esquema de engaste e do selo refletor
A funo resposta em freqncia medida para um dos atuadores apresentada na Figura 21. Verifica-se a freqncia de ressonncia do primeiro modo em torno de 200 Hz. importante destacar que todos os conjuntos de atuadores foram testados como intuito de garantir a mesma freqncia do primeiro modo.
17
Figura 21: FRF da viga (conjunto piezeltrico + chapa de ao)
4.2
ENSAIOS DE VISUALIZAO AERODINMICAAps determinar as FRFs dos atuadores, sua frequncia tima de operao e fabricar o modelo, alguns
ensaios de visualizao com tufts (pequenos barbantes que ajudam a verificar o descolamento do escoamento) foram realizados. O modelo pronto para ensaio pode ser visto na Figura 22.
Figura 22: Posicionamento dos tufts no modelo
A asa foi ento posicionada a ngulo de ataque nulo, mas com um ngulo de flap de 20. O tnel de vento soprador utilizado nos ensaios preliminares aqui realizados foi ento ligado a uma velocidade de 10m/s e foi feita a anlise para a condio dos atuadores desligados e para os atuadores excitados a uma frequncia de 200Hz e tenso de entrada de 200V (pico a pico da senide). Nas figuras abaixo podemos ver a diferena dos tufts com os atuadores ligados e desligados.
18
Figura 23: Tufts com atuadores desligados a 20 de ngulo de flap
Figura 24: Tufts com atuadores ligados a 20 de ngulo de flap, 200Hz e tenso de 200V
Percebemos que na Figura 24 os tufts encontram-se muito mais alinhados que na Figura 23, comprovando qualitativamente a melhora no escoamento, mantendo a camada limite colada superfcie, como esperado. Aps essa primeira verificao, buscou-se avaliar qualitativamente o efeito da frequncia de oscilao sobre o comportamento do sistema. Para tanto foram feitos ensaios com as frequncias de 100Hz, 200Hz e 300Hz, e suas fotos esto nas figuras 25 at 27.
Figura 25: Tufts com atuadores ligados a 20 de ngulo de flap, 100Hz e tenso de 200V
Figura 26: Tufts com atuadores ligados a 20 de ngulo de flap, 200Hz e tenso de 200V
Figura 27: Tufts com atuadores ligados a 20 de ngulo de flap, 300Hz e tenso de 200V
19 Como esperado, o melhor caso ocorre para a frequncia de 200Hz, j que esta a frequncia de ressonncia da viga, trabalhando em maiores amplitudes e fornecendo mais energia para o escoamento, mantendo-o colado a superfcie mais facilmente. Vale lembrar que a asa foi projetada (dimenses, velocidade de testes e posio dos atuadores ao longo da corda) para que a freqncia de ressonncia do primeiro modo dos atuadores resultasse na freqncia adimensional tima. Aps determinar que a frequncia experimental tima estava prxima de 200Hz, avaliou-se o comportamento do sistema para diversos ngulos do flap, como apresentado nas figuras 28 a 30.
Figura 28: Tufts com atuadores ligados a 20 de ngulo de flap, 200Hz e tenso de 200V
Figura 29: Tufts com atuadores ligados a 30 de ngulo de flap, 200Hz e tenso de 200V
Figura 30: Tufts com atuadores ligados a 40 de ngulo de flap, 200Hz e tenso de 200V
Inicialmente, comparando o comportamento dos tufts de 20 e 30 percebemos que aqueles na condio de maior ngulo de flape esto mais turbulentos, ou seja, houve uma piora na laminaridade sobre o flap. No entanto, este problema pode ser resolvido com o aumento da amplitude de oscilao. Ao passar para uma tenso de 300V os tufts voltam a ficar alinhados, mesmo a 30 de comando, como vemos na Figura 31.
20
Figura 31: Tufts com atuadores ligados a 30 de ngulo de flap, 200Hz e tenso de 300V
J ao comparar a Figura 28 com a Figura 30 vemos uma grande perda da laminaridade sobre o flape e diferentemente do ngulo de comando de 30, para um ngulo de 40, mesmo com 300V de tenso de entrada no atuador os tufts no voltam a ficar alinhados.
4.3
REVISO DA PROPOSTA PARA A SEGUNDA FASENo final do relatrio preliminar foram apresentadas algumas propostas para esta fase do projeto, que
revisamos aqui: Tomadas de presso: com o objetivo de melhorar a forma de medio alm do mtodo visual, podemos posicionar tomadas de presso ao longo da corda do perfil e verificar a distribuio de presso ao redor da superfcie. Tnel de vento e balana aerodinmica: tambm uma das formas de melhorar a medio e obter parmetros aerodinmicos mais precisos de sustentao e arrasto para diversas condies de anlise. Determinar com maior preciso a frequncia tima e amplitudes necessrias para obter ganhos efetivos no sistema. Para isso devemos ter como mtodo de avaliao a balana aerodinmica ou tomadas de presso, avaliando um espectro destes conjuntos de frequncia/amplitude. Ensaiar os piezeltricos atuando alternadamente: como o sistema de barramentos conecta atuadores pares e impares separadamente, possvel avaliar o possvel ganho ou perda no caso de uma defasagem de 180 na oscilao das vigas. Anlise da interferncia da geometria da cavidade: estimar se alguma modificao na cavidade abaixo do piezo pode modificar o comportamento do sistema, gerando ganhos aerodinmicos ainda melhores.
5
ANLISE PRELIMINAR DO EFEITO DE NGULO DE FLAPE E TENSO DE OPERAOAinda sem testar o modelo em uma balana aerodinmica, alguns ensaios de visualizao foram
conduzidos para se investigar de forma preliminar o efeito da tenso de excitao do piezeltrico em funo do ngulo de flape. Desta maneira, fixado o ngulo do flape, velocidade do escoamento e frequncia de oscilao, a tenso era aumentada at que houvesse alinhamento dos tufts. Abaixo apresentamos a tabela com estes resultados para as velocidades de 10m/s e 15m/s. Vale notar que a tenso mxima aplicada foi de 700V, valor em que os
21 atuadores tocam a parte superior do flape durante a oscilao.
Tabela 1: Tenso de entrada (Volts) do atuador para alinhamento dos tufts a 10m/s
Angulo de Flape 20 25 30
Frequncia do Atuador 150Hz 200Hz 250Hz >700 160 460 >700 300 640 >700 480 >700
Tabela 2: Tenso de entrada (Volts) do atuador para alinhamento dos tufts a 15m/s
Angulo de Flape 20 25 30
Frequncia do Atuador 150Hz 200Hz 250Hz >700 340 >700 >700 480 >700 >700 >700 >700
O primeiro fator a ser notado a aumento da amplitude necessria para manter o escoamento colado, em funo do aumento do ngulo de flape. Com maiores ngulos de flape, o escoamento tende a descolar com maior facilidade, devido ao aumento do gradiente adverso e presso. Desta maneira necessria uma amplitude maior de atuao para aumentar a energizao da camada limite, mantendo o escoamento colado. Alm disso, vemos que para frequncias um pouco diferentes da ressonncia h um grande salto na frequncia necessria no atuador. Na Funo de Resposta em Frequncia da viga (Figura 21), gerada e analisada na primeira fase do projeto, podemos observar a diferena de aproximadamente 25db entre a amplitude da relao entre velocidade e tenso de entrada para 200Hz e 250Hz. Desta forma, fica claro que frequncias prximas a ressonncia apresentam uma maior amplitude com o mesmo valor de tenso de entrada, aumentando o efeito aerodinmico. Por fim, notamos a grande diferena do comportamento do sistema para as velocidades do escoamento de 10m/s e 15m/s. O escoamento, com uma velocidade maior exige uma energia muito maior dos atuadores para manter o escoamento colado superfcie, o que pode ser explicado por duas hipteses: Pelo fato do escoamento estar com uma maior velocidade, necessria uma maior insero de energia no sistema para mant-lo colado a superfcie do flape, ou seja, o sopro provocado pelo atuador tambm deve ser maior para compensar esse aumento de velocidade do sistema. Ao aumentar a velocidade, afastamos o atuador da frequncia adimensional ideal ( ), o que
exige do sistema uma maior amplitude de oscilao para compensar esse afastamento da operao ideal.
6
ENSAIOS EM TNEL DE VENTO COM BALANA AERODINMICAComo proposto no fim da primeira fase do projeto, era necessria uma maneira mais precisa de avaliar o
efeito do uso deste sistema de controle da camada limite. Assim o modelo foi adaptado para ser instalado em um
22 tnel de vento de circuito aberto (no mais o soprador dos testes de visualizao), conectado a uma balana aerodinmica e assim obter seus coeficientes aerodinmicos com maior preciso. A seguir apresentamos a descrio do experimento bem como os resultados e anlise dos dados obtidos.
6.1
MONTAGEM DO EXPERIMENTOPara o ensaio aerodinmico, o modelo foi adaptado para ser colocado no tnel de vento didtico do
Departamento de Engenharia Aeronutica. Este um tnel de circuito aberto, uma seo de ensaio de 0,45mx0,45m e nvel de turbulncia mdio de 0,25%. O tnel de vento utilizado apresentado na Figura 32.
Figura 32: Tnel de vento utilizado para os experimentos
O tnel de vento tambm possui um tubo de pitot para medio de presso e determinao de velocidade do escoamento, que pode ser visto na Figura 33. O modelo conectado balana aerodinmica e posicionado dentro da cmara de ensaio apresentado na Figura 34.
Figura 33: Tubo de pitot dentro do tnel
23
Figura 34: Posicionamento do modelo dentro da cmara de ensaio
A balana conectada a um leitor de sinais para que seja possvel visualizar as foras no modelo. Alm disso, preciso medir a presso dinmica dentro do tnel conectando o tubo de pitot a um manmetro, alm de uma estao para medir dados atmosfricos. Os sinais de operao dos piezeltricos so obtidos por um gerador de sinais conectado a um amplificador de tenso de 200 vezes (modelo Trek PDV700). Desta forma, o gerador fornece sinais senoidais de 3,5V e o amplificador os passa para 700V. O esquema do ensaio pode ser visto na Figura 35 e a foto da montagem na Figura 36.
Figura 35: Esquema dos equipamentos utilizados no ensaio em tnel de vento
Figura 36: Equipamentos prontos para ensaio
24
6.2
DADOS ATMOSFRICOS E FRMULAS UTILIZADASUm fator importante para obteno precisa dos dados a medida dos dados atmosfricos de presso,
temperatura e umidade relativa, fatores necessrios para se determinar a densidade do ar e ento a velocidade do tnel de vento, j que o manmetro nos fornece com preciso apenas a presso relativa. Para isso, foi utilizada a estao meteorolgica Oregon FAW101-R e a frmula abaixo:(4)
Sendo: P: presso atmosfrica (Pa) M: massa molar do ar atmosfrico 29g/mol T: temperatura (K) R: constante dos gases 8,314 J/mol.K Com essa densidade, podemos determinar a presso dinmica do manmetro necessria para que se tenha uma velocidade do tnel de 10m/s:(5)
Alm de determinar a densidade ambiente para saber a velocidade do tnel com base na presso dinmica, como a balana fornece uma medida de fora, devemos calcular os coeficientes aerodinmicos com base na teoria clssica de adimensionalizao das foras (Anderson [1]).(6)
(7)
Sendo: : coeficiente de sustentao; : coeficiente de arrasto; : fora perpendicular ao escoamento (N); : fora paralela ao escoamento (N); : presso dinmica medida pelo manmetro; : rea de asa 0,09m. Com os clculos dos coeficientes em mos, podemos passar para o ensaio aerodinmico, obteno e anlise dos dados.
6.3
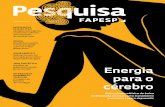
EFEITO DA FREQUENCIA DO SINALO primeiro passo dos ensaios em tnel de vento foi determinar a frequncia tima de operao e
confirmar o valor de 200Hz obtido nas anlises visuais. Para isso, fixamos o ngulo de ataque da asa em 0, o ngulo de flape em 10 e a tenso aplicada nos atuadores em 200V. Variando a frequncia para estes fatores fixos, obtemos o grfico da Figura 37.
250.3 Coeficiente de Sustentao (Cl) 0.25 0.2 0.15 0.1 0.05 0 0 50 100 150 200 Frequncia de Oscilao (Hz) 250 300
Figura 37: coeficiente de sustentao em funo da frequncia de oscilao para AoA=0, =10 e ddp=200V
Como esperado, notamos um pico de sustentao para a frequncia de 200Hz, quando ocorre a ressonncia do atuador e sua amplitude mxima, inserindo mais energia ao sistema, mantendo o fluxo mais colado ao flape, aumentando a sustentao. Alm disso, observa-se que para frequncias maiores que 250Hz ou menores que 150Hz, o coeficiente de sustentao permanece praticamente constante, ou seja, h um gasto energtico dos atuadores sem ganhos aerodinmicos relevantes. Assim, vemos a importncia de se trabalhar prximo a esta ressonncia, o que faz aumentar o desempenho com o mnimo consumo de energia, e fixaremos este valor de 200Hz para as anlises de ngulo de ataque, ngulo de flape e tenso de operao.
6.4
RESULTADOS E ANLISE DOS DADOS AERODINAMICOSAps confirmar a frequncia ideal de operao em 200Hz, podemos analisar o comportamento do perfil
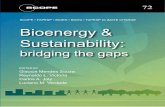
para diferentes ngulos de ataque, flape e tenso de operao dos atuadores. Para uma anlise inicial, foi fixado um ngulo intermedirio de flape de 20 e frequncia de 200Hz do atuador. Com isso foi possvel medir a fora para uma sequncia de ngulos de ataque e trs diferentes tenses de operao: 0V, 200V e 400V. Os grficos das figuras 38 e 39 fornecem os dados de Cl e L/D do perfil nestas trs condies.
261.6 1.4 1.2 1.0 0.8 0.6 ddp=0V 0.4 0.2 0.0 -10 -5 0 5 AoA [] Figura 38: Cl do modelo para uma frequncia de 200Hz e =20 30.0 25.0 20.0 L/D 15.0 10.0 5.0 0.0 -10 -5 0 5 AoA [] Figura 39: L/D do modelo para uma frequncia de 200Hz e =20 10 15 20 25 ddp=0V ddp=200V ddp=400V 10 15 20 25 ddp=200V ddp=400V Cl
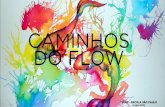
Nota-se uma oscilao do Cl aps o estol. Isto um comportamento comum para perfis operando em baixo nmero de Reynolds, j que se formam bolhas no extradorso, deixando-se de caracterizar um estol abrupto. Para facilitar a anlise dos dados, apresentamos a tabela com os valores exatos de Cl e L/D para as trs condies, bem como o ganho relativo de cada um dos coeficientes em relao condio sem atuao dos piezeltricos:
27Tabela 3: coeficientes aerodinmicos para =20; frequncia de 200Hz e velocidade de 10m/s
ddp = 0V AoA -5.0 -2.5 0.0 2.5 5.0 7.5 10.0 12.5 15.0 17.5 20.0 Cl -0.02 0.25 0.52 0.80 0.96 1.16 1.38 1.28 1.35 1.30 1.36 Cd 0.048 0.048 0.042 0.042 0.042 0.053 0.078 0.274 0.384 0.482 0.595 L/D -0.4 5.2 12.5 19.2 22.8 21.9 17.6 4.6 3.5 2.7 2.3 Cl 0.02 0.27 0.56 0.82 0.97 1.17 1.40 1.26 1.35 1.31 1.37
ddp = 200V Cd 0.042 0.048 0.042 0.042 0.037 0.049 0.078 0.279 0.381 0.482 0.591 L/D 0.5 5.7 13.4 19.6 25.9 24.1 17.9 4.6 3.5 2.7 2.3 Cl 0.03 0.29 0.57 0.84 0.98 1.19 1.40 1.27 1.34 1.31 1.36
ddp = 400V Cd 0.042 0.042 0.042 0.037 0.037 0.049 0.078 0.274 0.381 0.478 0.590 L/D 0.7 6.9 13.6 22.6 26.2 24.3 17.8 4.6 3.5 2.7 2.3
Tabela 4: aumento dos coeficientes aerodinmicos nas condies da Tabela 3, em relao ddp=0V
ddp = 200V AoA -2.5 0.0 2.5 5.0 7.5 10.0 12.5 15.0 17.5 20.0 Cl 9% 7% 3% 1% 1% 1% -1% 0% 1% 0% Cd 0% 0% 0% -11% -8% 0% 2% -1% 0% -1% L/D 9% 7% 2% 14% 10% 1% 1% -1% 1% 0% Cl 15% 9% 5% 3% 2% 1% 0% -1% 1% 0%
ddp = 400V Cd -14% 0% -11% -11% -8% 0% 0% -1% -1% -1% L/D 33% 9% 18% 15% 11% 1% 1% 0% 1% 0%
Os grficos e nmeros comprovam o esperado. Houve um ganho de Cl (e consequente ganho de L/D) com a utilizao do sistema de controle da camada limite. Esse controle mantm o escoamento mais colado ao flape, mesmo com uma deflexo de 20, o que faz aumentar o mdulo da presso no extradorso (diminuio de Cp) e consequente aumento da sustentao. No entanto, observando o grfico de L/D (Figura 39), verifica-se que o salto de 0V para 200V maior do que o salto de 200V para 400V. Isso ocorre porque em 200V o fluxo j se recola a superfcie do flape, provocando este salto de Cl e L/D inicial. Outro fator a ser notado nos grficos e tabelas que para baixos ngulos de ataque os ganhos de Cl e L/D so superiores quando comparados aos ganhos para altos ngulos de ataque. Uma explicao para este fato que, quando o perfil est em seu estol, a esteira j descolou em regies prximas ao bordo de ataque. Desta maneira, na regio dos atuadores j temos um fluxo turbulento e descolado, reduzindo o efeito do sistema, que mais indicado para manter colado superfcie um fluxo laminar. Para ilustrar esta explicao o perfil NACA 0015 foi simulado no programa XFoil [19] e sua esteira foi estudada para ngulos abaixo do estol e prximos a ele. Os ensaios podem ser vistos na Figura 40 e na Figura 41.
28
Figura 40: Esteira do perfil para =20 e ngulos abaixo do estol
Figura 41: Esteira do perfil para =20 e ngulo de estol
Assim confirmamos a hiptese de que o fluxo, no estol, se descola mais prximo ao bordo de ataque. Conclui-se, portanto, que posicionar atuadores prximos a esta regio poder ser uma maneira muito til de retardar o estol de um perfil, no somente na regio do flape. Ele capaz de inserir energia a camada limite, deixando-a mais turbulenta e evitando a separao precoce, o que ocorre com fluxos laminar principalmente a baixo nmero de Reynolds. Este ganho do CLmax pode ser comprovado pela Figura 15, um resultado dos estudos de Wygnanski [3] que aplica uma excitao no bordo de ataque, e consegue fazer com que no ocorra estol do perfil como um todo, tendo grandes ganhos de sustentao mxima. Outra anlise a ser realizada comparar o acrscimo de sustentao para cada ngulo de flape, e assim comparar a atuao do sistema destes diferentes ngulos. Para isso foi fixado a frequncia de oscilao em 200Hz, a tenso de operao de 400V, a velocidade em 10m/s e determinou-se o coeficiente de sustentao para os ngulos de flape de 10, 20 e 30 para as condies do sistema de controle ligado e desligado. Com isso foi possvel determinar o aumento porcentual da condio dos atuadores ligados em relao aos atuadores desligados e esses valores podem ser vistos no grfico da Figura 43.10% 8% Aumento de Cl em relao aos atuadores desligados 6% 4% 2% 0% -2% 0.0 -4% -6% -8% -10% AoA [] 2.5 5.0 7.5 10.0 12.5 =10 =20 =30
Figura 42: ganho de sustentao em diferentes ngulos de flape e ddp=400V, frequncia de 200Hz
29 Nota-se que o melhor caso ocorre para o ngulo de flape igual a 20. Uma explicao para este fator que, no caso do ngulo de 30 seria necessria uma maior tenso de operao dos atuadores para se obter os mesmos resultados, o que j havia sido estimado nos ensaios preliminares expressos na Tabela 1. J a possvel explicao do baixo ganho para o caso de 10 que, mesmo sem o acionamento do sistema, o perfil j se encontra com o fluxo colado a sua superfcie e o controle de camada limite torna-se menos eficaz nesta condio. Alm disso, vemos que para ngulos menores h um maior acrscimo de sustentao do perfil. Isso mostra que o sistema otimizado para trabalhar a baixos ngulos, como explicado pelas figuras 40 e 41. No ngulo de deflexo de 20 o ganho muito maior no ngulo de ataque nulo, o que comprova que o sistema possui uma melhor utilidade em determinada faixa de operao. Portanto, vemos que, fixada a tenso de operao, h um ponto timo para os ganhos aerodinmicos, tanto na escolha do ngulo de ataque, como na escolha do ngulo de flape, pontos que devem ser levados em considerao na utilizao dos atuadores em futuros projetos.
7
POSSIBILIDADE DE NOVAS MEDIES E MELHORIA DO SISTEMACom os ensaios realizados em tnel de vento foi possvel obter dados mais precisos em relao aos
anteriormente obtidos com o mtodo de visualizao por tufts, analisando com mais critrio o comportamento do sistema de controle da camada limite e seu efeito nos coeficientes aerodinmicos. Com estes ensaios quantitativos, foi possvel verificar algumas propostas apresentadas no relatrio preliminar: avaliar frequncia e tenso timas, alm de obter os ganhos reais nos coeficientes aerodinmicos. No entanto, como foram posicionados atuadores em somente cerca de 20% da envergadura da asa, o ganho foi baixo, em mdia 5%, o que dificultou as medidas, j que este baixo ganho exige maior preciso da balana e menor interferncia de outros fatores do tnel de vento. Apesar do avano das anlises ainda possvel propor novos estudos com este tipo de controle de camada limite, possvel objeto de estudo para futuros trabalhos dentro do curso de Engenharia Aeronutica da universidade. Abaixo citamos alguns destes estudos que podem trazer mais resultados e um melhor estudo da aplicabilidade do sistema.
7.1
CONSTRUO DE UMA ASA COM ATUADORES EM TODA A ENVERGADURAUma das maneiras de facilitar as anlises dos coeficientes aerodinmicos construir uma asa com
atuadores em toda a sua envergadura. Isto faz com que os ganhos aerodinmicos sejam maiores e, portanto, mais fcil de medir. A balana aerodinmica utilizada possui uma preciso da fora de cerca de 0,03N e muitas vezes a diferena entre a fora medida com tenso de operao de 0V e 200V era de 0,06N ou menos. Ao posicionar atuadores em toda a envergadura aumentamos esta diferena e trabalhamos mais distante da preciso dos instrumentos de medio, podendo estimar ganhos de eficincia com maior exatido. Alm disso, ao posicionar atuadores somente no centro da asa, causamos um efeito tridimensional no ensaio, e no avaliamos bem o comportamento 2D do novo perfil aerodinmico com o controle da camada limite.
30 Este posicionamento central faz com que seja gerada uma esteira em cima do flape, que no possvel ser avaliada. O que se observou nos ensaios de visualizao que formada uma esteira de ao dos atuadores convergente. Ou seja, os tufts que estavam logo atrs dos atuadores da ponta no estavam alinhados da mesma forma que os do centro, como vemos na Figura 43.
Tufts desalinhados atrs dos atuadoresFigura 43: Tufts das pontas desalinhados
Com isso, ao posicionar atuadores em toda a envergadura, podemos estimar a obteno de um ganho maior que 5 vezes, j que na asa testada o controle era realizado em apenas 20%.
7.2
ENSAIOS COM ATUADORES ATUANDO EM DEFASAGEMCom um nmero maior de atuadores na asa e analisando o efeito puramente 2D do controle da camada
limite, interessante estudar o efeito dos atuadores atuando em separado, ou seja, alternadamente atuando defasados em 180. Desta forma, enquanto atuadores pares esto em seu mximo, os impares esto em seu mnimo de amplitude. No entanto, isto exige um sistema de gerao de sinal com duas sadas e dois amplificadores de tenso, equipamentos no disponveis no departamento. Alm disso, tambm possvel verificar o efeito de atuar apenas metade dos piezeltricos alternadamente, ou seja, oscilar apenas atuadores pares ou mpares. Esta anlise interessante, pois, a depender do efeito aerodinmico, pode-se obter pouca perda de desempenho com apenas metade na energia gasta, deixando o sistema mais eficiente.
7.3
ESTUDO DO GAP ENTRE ATUADOR E FLAPEUm dos parmetros de futuros ensaios a modificao da distncia entre a ponta livre da viga e o incio
do flap. Esta distncia, ao ser aumentada, pode gerar maior fluxo de ar entre a cavidade abaixo do atuador e o extradorso do flape. Este aumento de fluxo (sopro no extradorso) pode aumentar o efeito do sistema e, com um mesmo gasto energtico do sistema eltrico, aumentar o ganho aerodinmico. No entanto esta anlise condicionada a um meio de medida mais preciso. A balana aerodinmica j se mostrou com baixa preciso para este tipo de anlise, que deve representar baixo ganho. Assim, para um ensaio
31 deste tipo, seria necessrio um tnel e balana aerodinmica de maior preciso aos utilizados neste ensaio.
7.4
ESTUDO DO TAMANHO DA CAVIDADE ABAIXO DO ATUADORUm estudo semelhante anlise do gap entre atuador e flape a avaliao do tamanho da cavidade
abaixo do atuador (Figura 44). Da mesma maneira que o parmetro anterior, o aumento desta cavidade pode aumentar o fluxo de ar soprado sobre o flape, e assim aumentar o desempenho do sistema.cavidade a ser aumentada
Figura 44: Cavidade a ser aumentada em possveis anlises
Mas as limitaes para esta medies continuam as mesmas. Possivelmente esta diferena baixa o suficiente para a balana aerodinmica no avaliar com preciso esta variao. Alm disso, para melhorar esta anlise importante o uso de atuadores em toda a envergadura da asa, o que aumenta o ganho/perda das modificaes, facilitando medies.
8
CONCLUSONesta fase final do projeto alguns avanos promissores foram obtidos nas medies aerodinmicas.
Confirmamos a grande utilidade dos atuadores piezeltricos de aumentar o coeficiente de sustentao e eficincia aerodinmica de uma asa flapeada operando a baixo nmero de Reynolds, principalmente quando utilizados a baixos ngulos de ataque. A vibrao das vigas capaz de inserir uma energia a camada limite, deixando-a mais turbulenta, diminuindo o gradiente adverso de presso e, portanto, mais difcil de descolar da superfcie. No entanto, percebemos a grande sensibilidade da posio desses atuadores. No local em que foram posicionados, eles so teis para manter o escoamento colado no flape a baixos ngulos, mas quando operam em um ngulo prximo ao estol, perdem sua efetividade. Vale, portanto, destacar que foi encontrado um ponto de operao ideal do sistema. Com os dados apresentados vemos que o sistema ajuda a manter a efetividade do flape a baixos ngulos de ataque, o que pode ser til para algumas aplicaes no ramo de aeronutica. Desta maneira, vale ressaltar que este sistema no o adequado para melhorar o desempenho a altos ngulos de ataque, mas sim para ngulos distantes do estol. Alm disso, notamos que a energia necessria para ganhos aerodinmicos depende do ngulo de flape aplicado, ou seja, quanto maior o ngulo, maior a tenso exigida para ter aumento da eficincia aerodinmica. Este comportamento um dos fatores limitantes do sistema, haja vista que o piezeltrico possui um mximo de tenso de trabalho, que no pode ser ultrapassada para altos ngulos de flape. Os experimentos, apesar de conclusivos e com bons resultados numricos, apresentaram alguns pontos
32 fracos que podem ser corrigidos em futuros projetos. O primeiro deles a baixa velocidade (e consequente baixo nmero de Reynolds) utilizada. Isto faz com que o perfil tenha um comportamento no linear prximo ao estol, tendo oscilaes nesta faixa. Alm disso, a baixa velocidade faz com que tenhamos um valor da fora medida muito baixa, fazendo com que as medies fiquem muito prximas preciso da balana, principalmente da fora de arrasto, o que dificulta a anlise dos dados. Outro fator que colaborou para a baixa preciso dos resultados foi a utilizao de atuadores apenas em uma faixa da asa. Isto traz, proporcionalmente, um aumento menor dos coeficientes, e o ganho aerodinmico novamente fica prximo resoluo dos equipamentos de medida. Caso tivssemos atuadores em toda a envergadura do modelo, teramos ganhos maiores e a preciso do equipamento teria menor interferncia. Considerando acertos e erros do projeto, os resultados obtidos confirmam a tecnologia de controle de escoamento como muito promissora. O fluxo realmente capaz de permanecer colado superfcie mesmo com mudanas abruptas do ngulo da superfcie (como no caso do flape) e sua aplicabilidade pode se estender em muitas outras reas de aerodinmica e Engenharia Aeronutica, como em turbinas elica, cujo peso do equipamento tem menor efeito, entradas de ar em motores e outras superfcies que exigem drstica mudana de ngulo do fluxo e que, principalmente, trabalham em regime laminar com fcil descolamento. Como vimos, muitas variveis ainda podem ser estudadas e muito a ser otimizado. A depender do objetivo do projeto, podemos escolher diferentes formas de aplicar a tecnologia para obter ganhos esperados, e um estudo caso a caso pode ser feito para obter melhores resultados.
9
BIBLIOGRAFIA
[1] ANDERSON, J. D. Fundamental of Aerodynamics. Mc-Graw-Hill Company, 2001. [2] DOLLE, T.J.A. Flap Performance Improvement by Surface Excitation. A numerical research into active flow control. Faculty of Aerospace Engineering. Delft University of technology. 17 de Junho de 2009. [3] WYGNANSKI I.J., GREENBLATT D. The Control of Flow Separation by Periodic Excitation. Dept. of Fluid Mechanics and Heat Transfer, Faculty of Engineering, Tel Aviv University. 2000. [4] INMAN, D. J., CUDNEY, H. H. Structural and Machine Design Using Piezoceramic Materials: A Guide for
Structural Design Engineers. Final Report to NASA Langley Research Center, NASA Grant Number NAG1-1998, 30 de Abril de 2000.[5] LLOYD, J. M. Electrical Properties of Macro-Fiber Composite Actuators and Sensors. M.S. Thesis,
Mechanical Engineering Dept., Virginia Tech, Blacksburg, VA. 22 de Junho de 2004.[6] SCHULTZ, M. R. Use of Piezelectric Actuators to Effect Snap-Through Behavior of Unsymmetric
Composite Laminates. Ph.D. Dissertation, Engineering Science and Mechanics Dept, Virginia Tech, Blacksburg, VA. 17 de Abril de 2003.[7] HAGOOD, N. W., BENT, A. A. Development of Piezelectric Fiber Composites for Structural Actuation.th
34 AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, La Jolla, CA,
33
1993, AIAA Paper No. 93-1717-CP, pp.3625-3638.[8] Aircraft Controls. Civil Air Patrol. Suffolk Cadet Squadron VII. Disponvel em : http://www.capny153.org/aircraftcontrols.htm Acesso em 16 de dezembro de 2010. [9] NASA. Introduction to Aerodynamics of Flight. Captulo IV: Subsonic Flow Effects. Disponvel em: http://history.nasa.gov/SP-367/chapt4.htm#f67 Acesso em 16 de dezembro de 2010. [10]BILGEN, O. Macro Fiber Composite Actuated Unmanned Air Vehicles: Design, Development, and
Testing. M.S. Thesis, Mechanical Engineering Dept., Virginia Tech, Blacksburg, VA. 10 de Maio de 2007.[11]PIEZMATERIALS. Piezelectric Materials. Disponvel em: http://www.piezmaterials.com/. Acesso em 13 de dezembro de 2010. [12]BACHAR T. et al. Oscillatory Blowing, a Tool to Delay Boundary Layer Separation. AIAA J 1993; 31(11):205260. [13] GREEN BLATT D., SASSON, B. Effect of Steady and Unsteady Slot Blowing on a Vertical Axis Wind Turbine. 28th AIAA Applied Aerodynamics Conference. AIAA 2010-4406. Chicago, Illinois. 28 de Junho de 2010. [14]COLLIS, S.S. et al. Issues in Active Flow Control: Theory, Control, Simulation, and Experiment. Progress in Aerospace Science 40. 2004. [15] HAU, E. Wind Turbines. 2nd Edition. Springer [16] SPAKOVSZKY, Z. S. Thermodynamics and Propulsion. Captulo 13.3: Aircraft Range: the Breguet Range Equation. Massachusetts Institute of Tecnology. Disponvel em: http://web.mit.edu/
16.unified/www/FALL/thermodynamics/notes/node98.html Acesso em 16 de dezembro de 2010. [17] BILGEN, O.; DE MARQUI JUNIOR, C.; KOCHERSBERGER, K.B.; INMAN, D.J. Piezoceramic Composite Actuators for Flow Control in Low Reynolds Number Airflow. Journal of Intelligent Material Systems and Structures (Print), v. 21, p. 1201-1212, 2010. [18] DE MARQUI JUNIOR, C.; ERTURK, A.; INMAN, D.J. An electromechanical finite element model for piezoelectric energy harvester plates. Journal of Sound and Vibration, v. 327, p. 9-25, 2009. [19] DRELA, M. XFoil Users Guide.