SEM0104 SEM0104 - Aula 11 Aula 11 Síntese de … · Introdução •Até o momento, estudou-se a...
67
SEM0104 SEM0104 - Aula 11 Aula 11 Síntese de Mecanismos Síntese de Mecanismos Síntese de Mecanismos Síntese de Mecanismos Prof. Dr. Marcelo Prof. Dr. Marcelo Becker Becker SEM - EESC - USP
Transcript of SEM0104 SEM0104 - Aula 11 Aula 11 Síntese de … · Introdução •Até o momento, estudou-se a...

SEM0104 SEM0104 -- Aula 11Aula 11
Síntese de Mecanismos Síntese de Mecanismos Síntese de Mecanismos Síntese de Mecanismos
Prof. Dr. Marcelo Prof. Dr. Marcelo BeckerBeckerSEM - EESC - USP
•• IntroduçãoIntrodução• Tipos de Síntese
• Erros de Trajetória
Sumário da AulaSumário da Aula
• Erros de Trajetória
• Erros Estruturais
• Síntese de Mecanismos
• Exemplos
• Bibliografia RecomendadaEESC-USP © M. Becker 2009 2/67
IntroduçãoIntrodução
• Até o momento, estudou-se a análise de mecanismos
• Agora: síntese cinemática:• Agora: síntese cinemática:
– projetar ou criar mecanismos que tenham certas características desejadas de movimento
EESC-USP © M. Becker 2009 3/67

IntroduçãoIntrodução
• A síntese tem 3 fases bem definidas:
– 1a. Definição do tipo de mecanismo ou juntas empregadas;
– 2a. Definição do número de corpos (‘links’) e juntas necessárias;
– 3a. Dimensionamento dos corpos (‘links’).
EESC-USP © M. Becker 2009 4/67
IntroduçãoIntrodução11oo Passo Passo -- SínteseSíntese
• Definição do tipo de mecanismo ou juntas empregadas:
� Know-how sobre os mecanismos e juntas existentes;existentes;
� Envolve critérios como:• Processos de Fabricação;
• Materiais e Custos;
• Espaço Disponível para Instalação;
• Confiabilidade e Segurança.
EESC-USP © M. Becker 2009 5/67

IntroduçãoIntrodução22oo Passo Passo -- SínteseSíntese
• Definição do número de corpos (‘links’) e juntas necessárias para se obter a “mobilidade” necessária:
– Empregar as equações de GDLs – Graus de Liberdade (aula 2)
Kutzbach: N = 3.(B-1) – 2.nJ1 – nJ2
N = 3.nB – Σ (3 - fi)nJ
i = 1
EESC-USP © M. Becker 2009 6/67

IntroduçãoIntrodução33oo Passo Passo -- SínteseSíntese
• Dimensionamento de cada corpo (‘link’) que compõe o mecanismo, em função do movimento desejado, através da aplicação de algum método matemático...
EESC-USP © M. Becker 2009 7/67
•• IntroduçãoIntrodução•• Tipos de SínteseTipos de Síntese
• Erros de Trajetória
Sumário da AulaSumário da Aula
• Erros de Trajetória
• Erros Estruturais
• Síntese de Mecanismos
• Exemplos
• Bibliografia RecomendadaEESC-USP © M. Becker 2009 8/67
Tipos de SínteseTipos de Síntese
• Basicamente há três tipos de Síntese Cinemática:
– Gerador de Função;– Gerador de Função;
– Gerador de Trajetória;
– Movimentação de corpos / cargas.
EESC-USP © M. Becker 2009 9/67
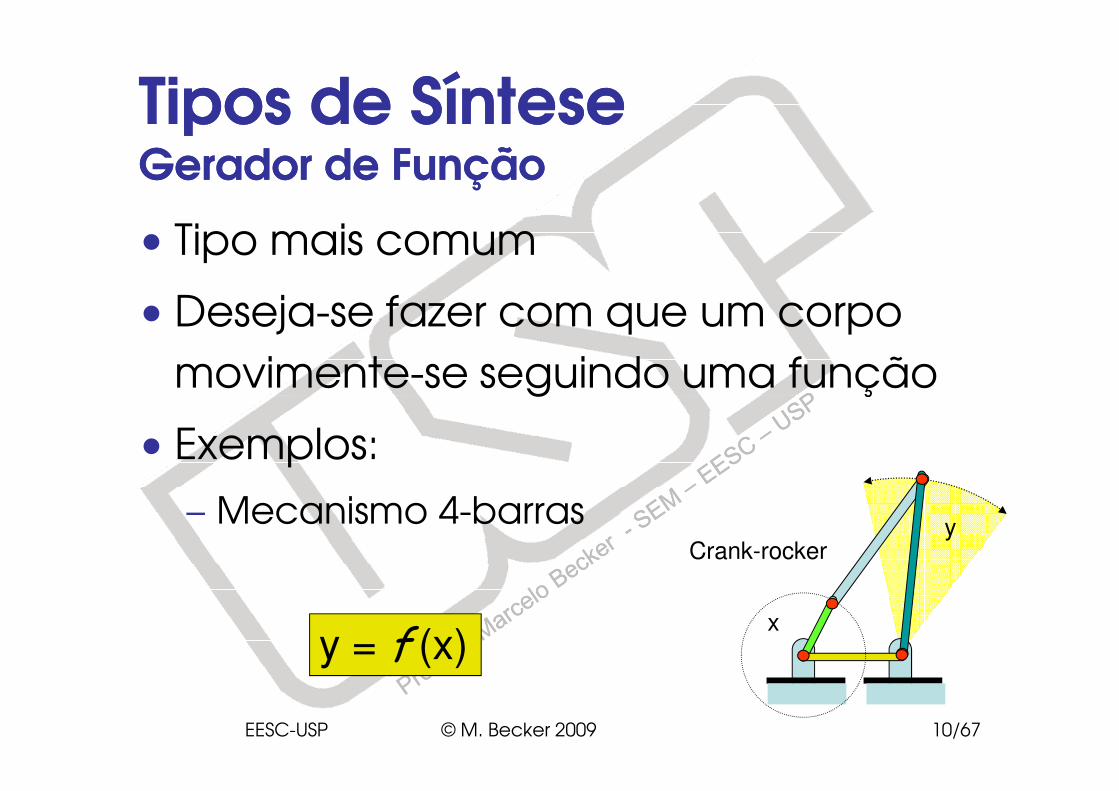
Tipos de SínteseTipos de SínteseGerador de FunçãoGerador de Função
• Tipo mais comum
• Deseja-se fazer com que um corpo movimente-se seguindo uma funçãomovimente-se seguindo uma função
• Exemplos:
– Mecanismo 4-barras
x
Crank-rockery
y = f (x)
EESC-USP © M. Becker 2009 10/67
• Deseja-se fazer com que um determinado ponto do mecanismo execute uma trajetória pré-determinada
• Em geral esta trajetória é composta de
Tipos de SínteseTipos de SínteseGerador de TrajetóriaGerador de Trajetória
• Em geral esta trajetória é composta de segmentos de reta, arcos de circunferência e elipses, etc.
• Exemplos: rever geradores de curvas e de retas (aula 3)
EESC-USP © M. Becker 2009 11/67
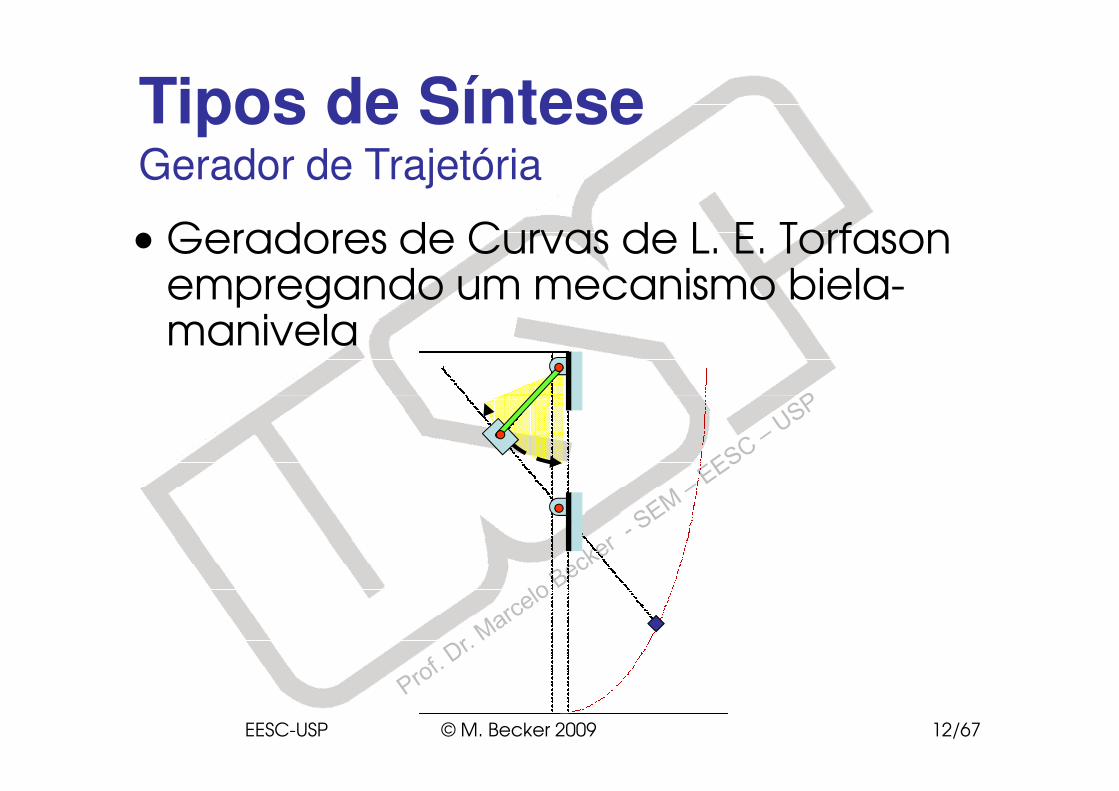
• Geradores de Curvas de L. E. Torfason empregando um mecanismo biela-manivela
Tipos de SínteseGerador de Trajetória
EESC-USP © M. Becker 2009 12/67
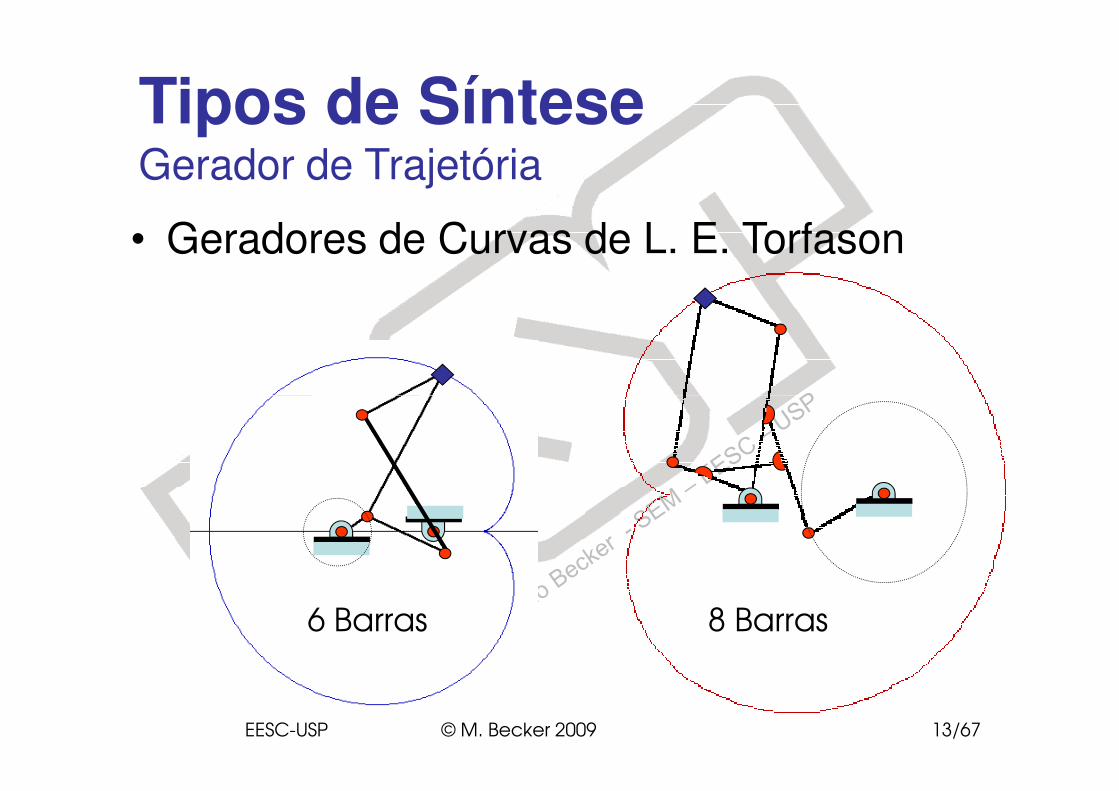
Tipos de SínteseGerador de Trajetória
• Geradores de Curvas de L. E. Torfason
6 Barras 8 Barras
EESC-USP © M. Becker 2009 13/67
• Deseja-se movimentar corpos ou cargas de uma posição inicial a outra, final
• Em geral, o problema restringe-se a simples translação ou combinação de translação e
Tipos de SínteseTipos de SínteseMovimentação de Corpos / CargasMovimentação de Corpos / Cargas
translação ou combinação de translação e rotação
• Exemplos: Movimentação de Cargas em retro-escavadeiras, indústrias, tratores, etc.
EESC-USP © M. Becker 2009 14/67
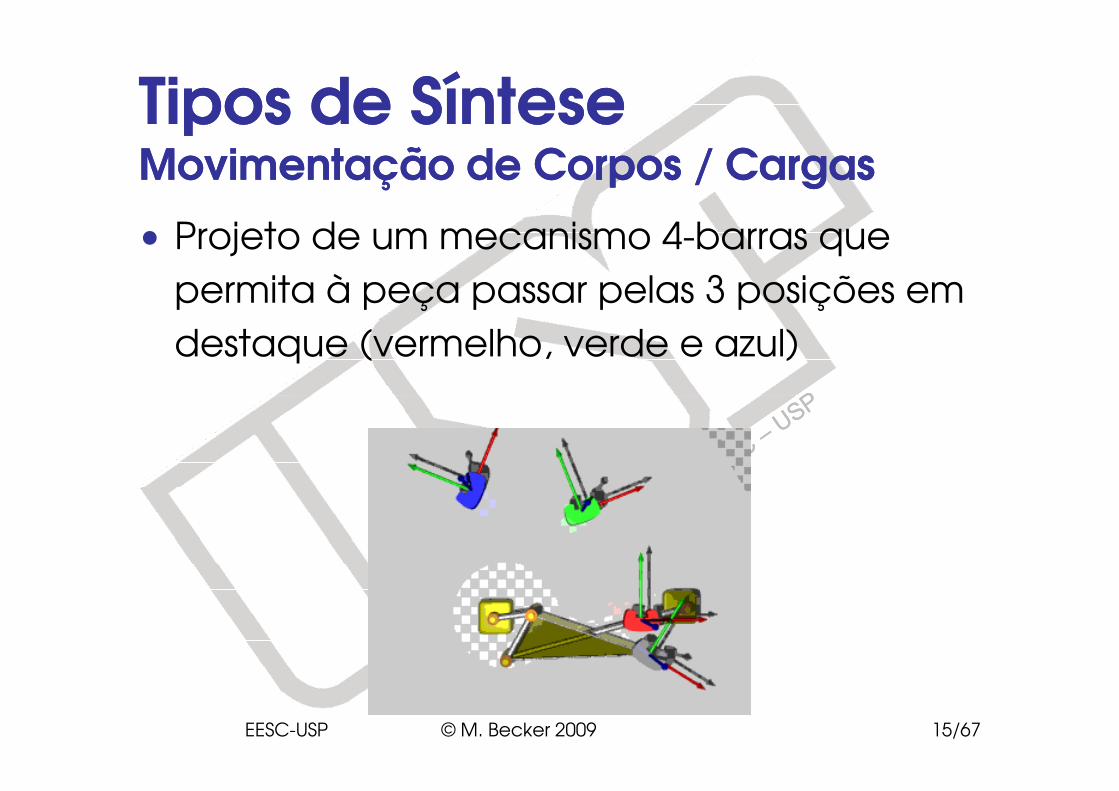
• Projeto de um mecanismo 4-barras que permita à peça passar pelas 3 posições em destaque (vermelho, verde e azul)
Tipos de SínteseTipos de SínteseMovimentação de Corpos / CargasMovimentação de Corpos / Cargas
EESC-USP © M. Becker 2009 15/67
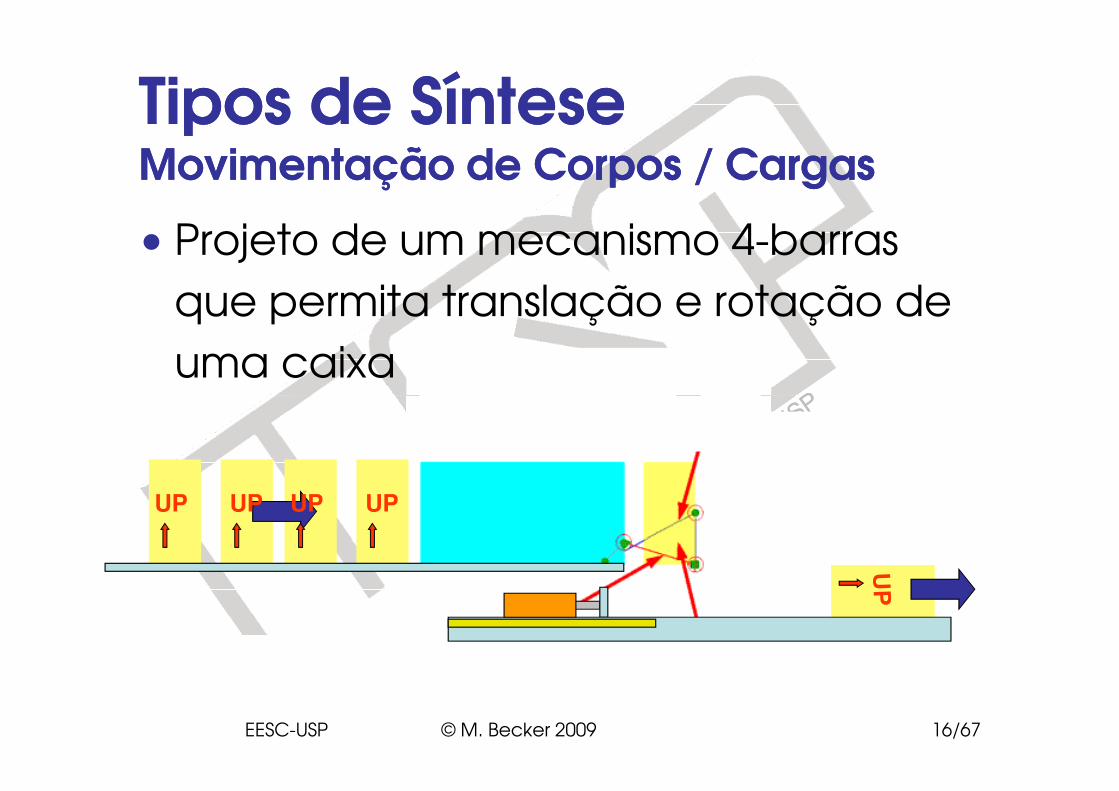
• Projeto de um mecanismo 4-barras que permita translação e rotação de uma caixa
Tipos de SínteseTipos de SínteseMovimentação de Corpos / CargasMovimentação de Corpos / Cargas
UP UP UP UP
EESC-USP © M. Becker 2009 16/67
•• IntroduçãoIntrodução•• Tipos de SínteseTipos de Síntese
•• Erros de TrajetóriaErros de Trajetória
Sumário da AulaSumário da Aula
•• Erros de TrajetóriaErros de Trajetória
• Erros Estruturais
• Síntese de Mecanismos
• Exemplos
• Bibliografia RecomendadaEESC-USP © M. Becker 2009 17/67
Erros de TrajetóriaErros de Trajetória
• Duas fontes geradoras de erros:
– Tolerâncias de fabricação
•Má especificação...•Má especificação...
•Má fabricação...
– Limitação do Mecanismo
•Não consegue gerar uma trajetória desejada com 100% de acerto...
EESC-USP © M. Becker 2009 18/67

Erros de TrajetóriaErros de Trajetória
• Tolerâncias de fabricação
– Exemplo de má especificação
Prof. Dr.-Ing. Manfred Hiller
Institut für Mechatronik und Systemdynamik
Detalhe do Mecanismo
ZOOM
EESC-USP © M. Becker 2009 19/67
•• IntroduçãoIntrodução•• Tipos de SínteseTipos de Síntese
•• Erros de TrajetóriaErros de Trajetória
Sumário da AulaSumário da Aula
•• Erros de TrajetóriaErros de Trajetória
•• Erros EstruturaisErros Estruturais
• Síntese de Mecanismos
• Exemplos
• Bibliografia RecomendadaEESC-USP © M. Becker 2009 20/67
Erros EstruturaisErros Estruturais• Em geral:
– Mecanismos não produzem trajetórias exatamente como são desejadas
• Pontos de precisão: pontos satisfeitos pelo mecanismomecanismo– Se o mecanismo satisfaz estes pontos, a trajetória
resultante deve desviar-se pouco da trajetória desejada
• Erros estruturais: diferença entre o obtido e o desejado...
• Independem da fabricação ou projeto (desvios / tolerâncias)
EESC-USP © M. Becker 2009 21/67

Erros EstruturaisErros Estruturais• Espaçamento de Chebychev:
– Para n pontos no intervalo x0 ≤ x ≤ xn+1
Xj = 1.(xn+1 + x0) – 1.(xn+1 – x0).cos (2j - 1).π
2 2 2.n
j = 1, 2, ..., n
• Cuidado com defeitos de branch e order:– Impossibilidade de movimento contínuo do mecanismo
– Seqüência dos pontos de precisão
EESC-USP © M. Becker 2009 22/67
Erros EstruturaisErros EstruturaisExemploExemplo
• Deseja-se o espaçamento de Chebychevpara a função: y = x0,8 para 3 pontos de precisão no intervalo 1 ≤ x ≤ 3:
X = 1.(3 + 1) - 1.(3 - 1).cos (2.1 - 1).π = 2 - cosπ = 1,134X1 = 1.(3 + 1) - 1.(3 - 1).cos (2.1 - 1).π = 2 - cosπ = 1,134
2 2 2.3 6
X2 = 2 – cos3π = 2,000
6
X3 = 2 – cos5π = 2,866
6
EESC-USP © M. Becker 2009 23/67

Erros EstruturaisErros EstruturaisExemploExemplo
• Retornando à função: y = x0,8, obtém-se para y:
X1 = 1,134 Y1 = 1,1063π3π3π3π
X
X0 = 1 Xn+1 = 3∆∆∆∆X = 2
X1 = 1,134 Y1 = 1,106
X2 = 2,000 Y2 = 1,741
X3 = 2,866 Y3 = 2,322
1,134 2,0 2,866
ππππ/6
3π3π3π3π/65π5π5π5π/6
EESC-USP © M. Becker 2009 24/67
•• IntroduçãoIntrodução•• Tipos de SínteseTipos de Síntese
•• Erros de TrajetóriaErros de Trajetória
Sumário da AulaSumário da Aula
•• Erros de TrajetóriaErros de Trajetória
•• Erros EstruturaisErros Estruturais
•• Síntese de MecanismosSíntese de Mecanismos
• Exemplos
• Bibliografia RecomendadaEESC-USP © M. Becker 2009 25/67
Síntese de Mecanismos Síntese de Mecanismos • Métodos Gráficos
– 2 Pontos
– 3 Pontos
– 4 Pontos– 4 Pontos
• Métodos Analíticos
– Ângulo de Transmissão Ótimo
– Método de Freudenstein
– Espaçamento de Chebychev
EESC-USP © M. Becker 2009 26/67

Síntese de Mecanismos Síntese de Mecanismos Métodos GráficosMétodos Gráficos
• Métodos Gráficos
– 2 Pontos
– 3 Pontos– 3 Pontos
– 4 Pontos
EESC-USP © M. Becker 2009 27/67
B1
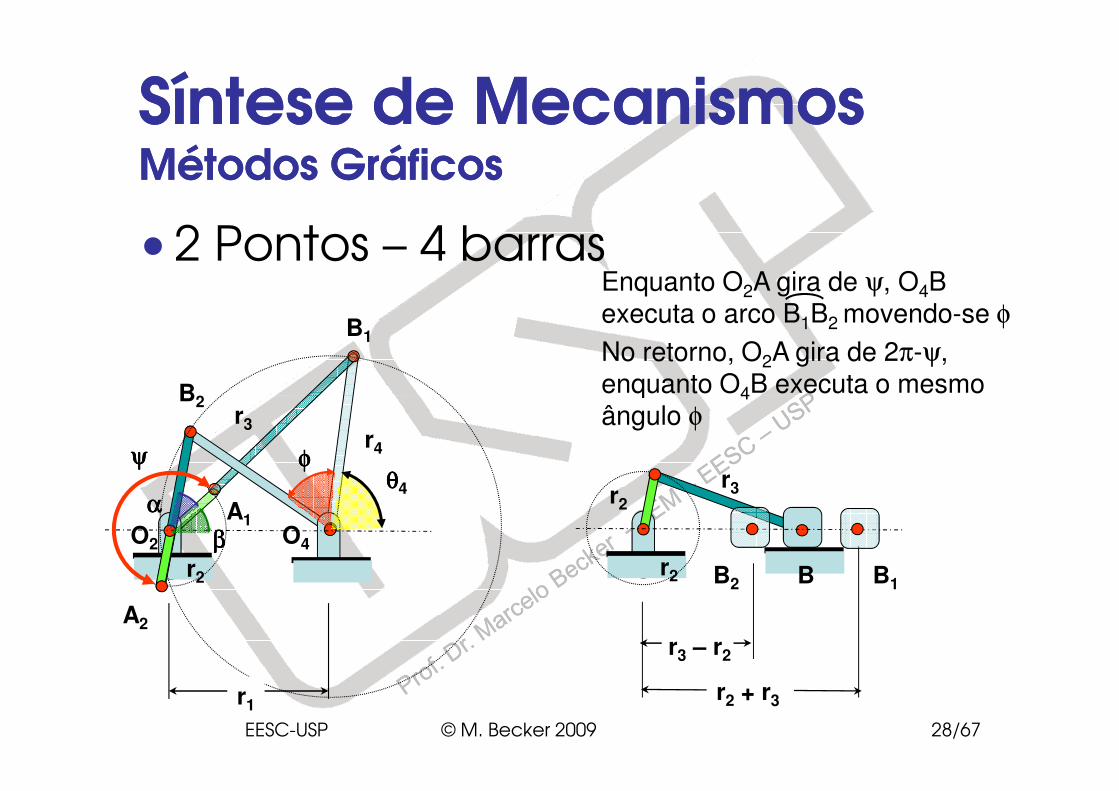
Síntese de Mecanismos Síntese de Mecanismos Métodos GráficosMétodos Gráficos
• 2 Pontos – 4 barras
B2
Enquanto O2A gira de ψ, O4B executa o arco B1B2 movendo-se φ
No retorno, O2A gira de 2π-ψ, enquanto O4B executa o mesmo
A1
θθθθ4
φφφφψψψψ
r2
r3r4
r1
B2
A2
r2
r3r2
r2 + r3
r3 – r2
B1B2 B
ββββ
αααα
O2 O4
enquanto O4B executa o mesmo ângulo φ
EESC-USP © M. Becker 2009 28/67

Síntese de Mecanismos Síntese de Mecanismos Métodos Gráficos Métodos Gráficos –– 2 Pontos2 Pontos• Razão de tempo entre avanço e retorno:
Q = tempo de avançotempo de retorno
• Mecanismo que executa operações repetitivas, Q grande...
• Para o 4-barras: se ψ > 180o
α = ψ – 180o
• Assim: Q = 180o + α180o – α
EESC-USP © M. Becker 2009 29/67
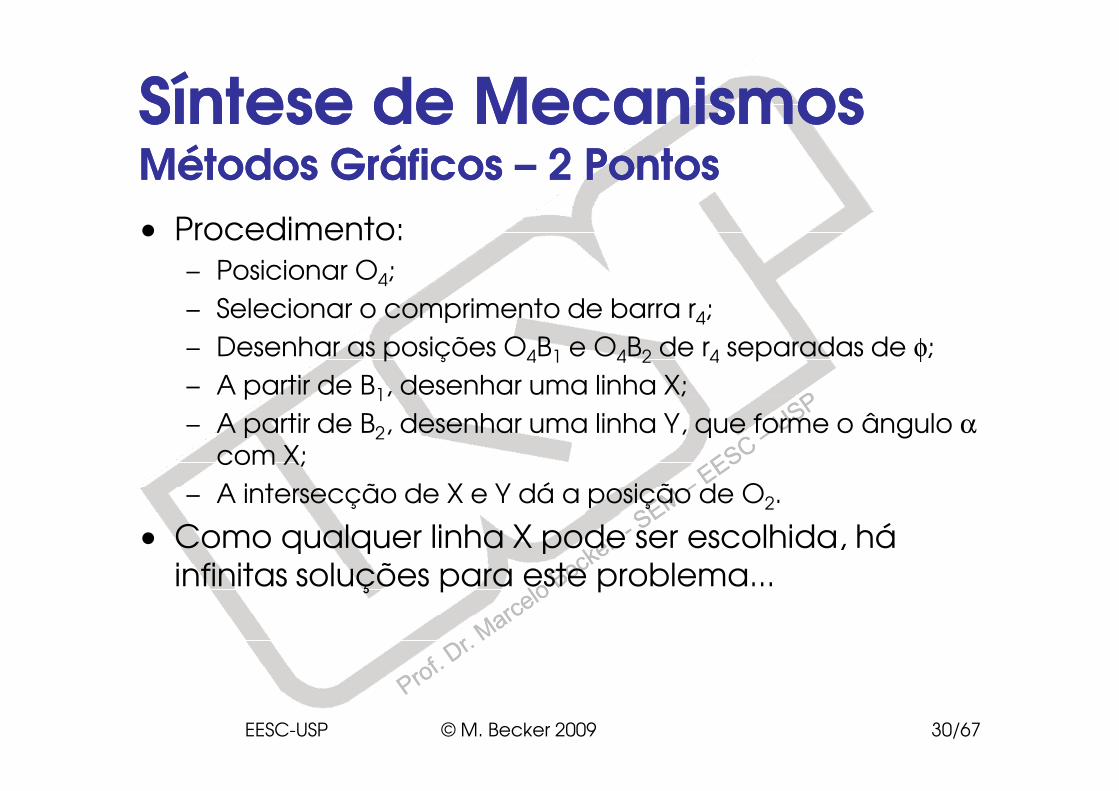
Síntese de Mecanismos Síntese de Mecanismos Métodos Gráficos Métodos Gráficos –– 2 Pontos2 Pontos• Procedimento:
– Posicionar O4;– Selecionar o comprimento de barra r4;– Desenhar as posições O4B1 e O4B2 de r4 separadas de φ;– A partir de B1, desenhar uma linha X;– A partir de B1, desenhar uma linha X;– A partir de B2, desenhar uma linha Y, que forme o ângulo α
com X;– A intersecção de X e Y dá a posição de O2.
• Como qualquer linha X pode ser escolhida, há infinitas soluções para este problema...
EESC-USP © M. Becker 2009 30/67
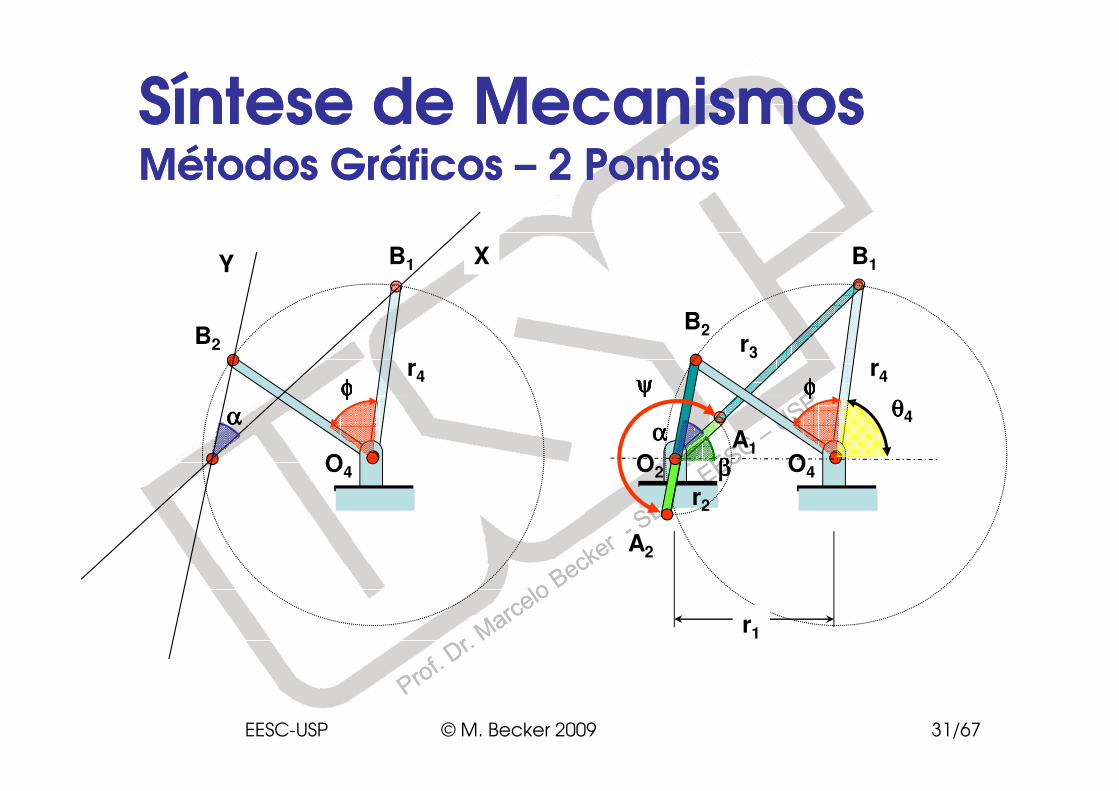
Síntese de Mecanismos Síntese de Mecanismos Métodos Gráficos Métodos Gráficos –– 2 Pontos2 Pontos
B1
r4
B2
B1
θθθθφφφφψψψψ
r3r4
B2
φφφφ
XY
O4
A1
θθθθ4
φφφφψψψψ
r2
r1
A2
ββββ
αααα
O2 O4
φφφφ
αααα
EESC-USP © M. Becker 2009 31/67
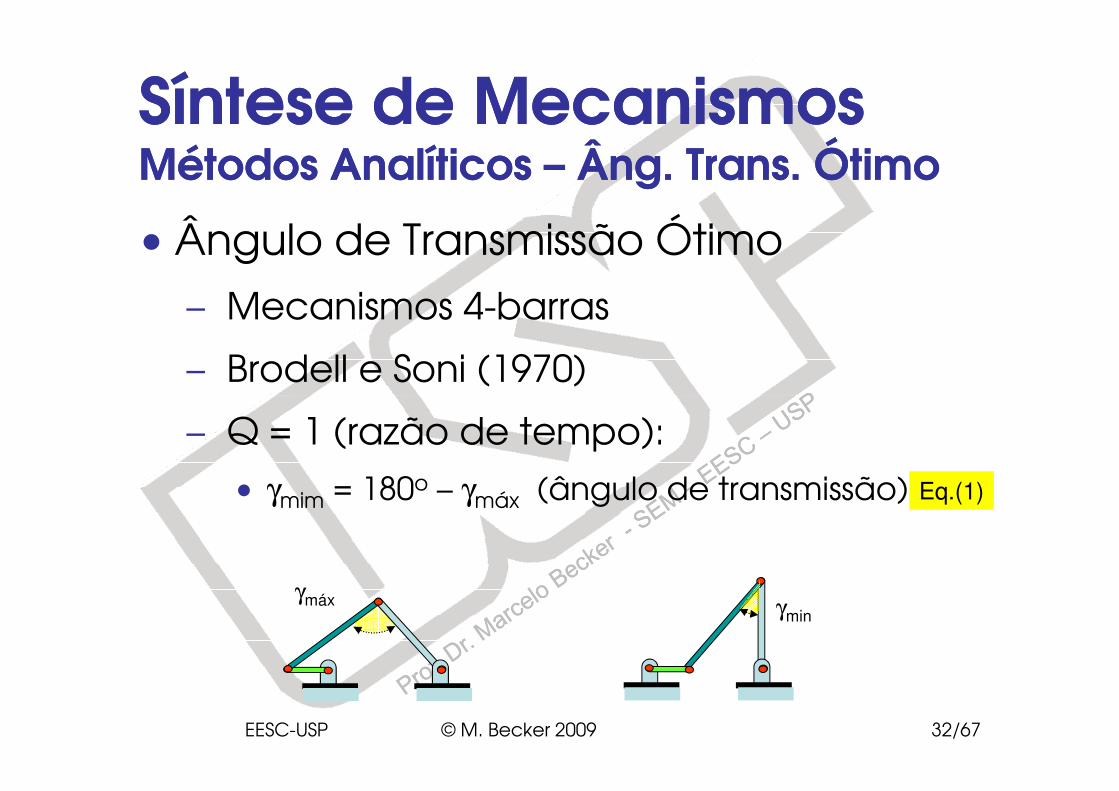
Síntese de MecanismosSíntese de MecanismosMétodos Analíticos Métodos Analíticos –– Âng. Trans. ÓtimoÂng. Trans. Ótimo
• Ângulo de Transmissão Ótimo
– Mecanismos 4-barras
– Brodell e Soni (1970)
– Q = 1 (razão de tempo):
• γmim = 180o – γmáx (ângulo de transmissão)
γmáx γmin
Eq.(1)
EESC-USP © M. Becker 2009 32/67
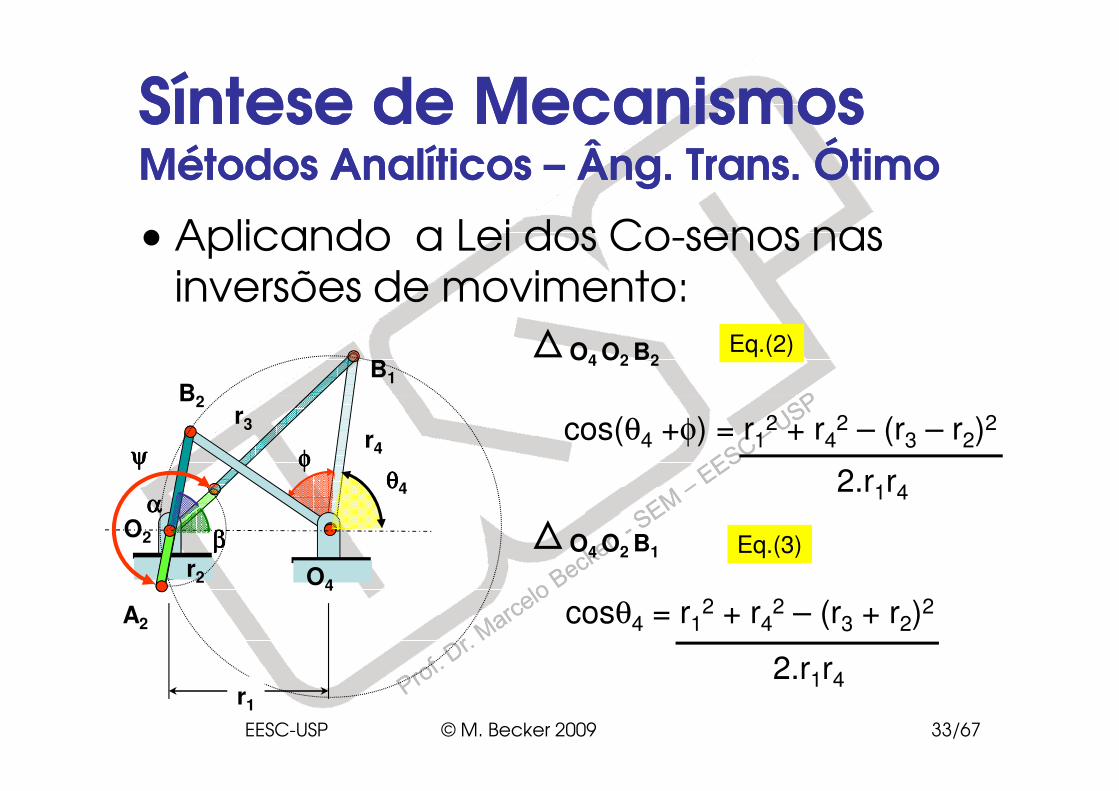
• Aplicando a Lei dos Co-senos nas inversões de movimento:
Síntese de MecanismosSíntese de MecanismosMétodos Analíticos Métodos Analíticos –– Âng. Trans. ÓtimoÂng. Trans. Ótimo
B2
B1
O4 O2 B2Eq.(2)
cos(θ4 +φ) = r12 + r4
2 – (r3 – r2)2
2.r1r4
cosθ4 = r12 + r4
2 – (r3 + r2)2
2.r1r4
θθθθ4
φφφφψψψψ
r2
r3r4
r1
ββββ
αααα
B2
A2
O4
O2 O4 O2 B1 Eq.(3)
EESC-USP © M. Becker 2009 33/67
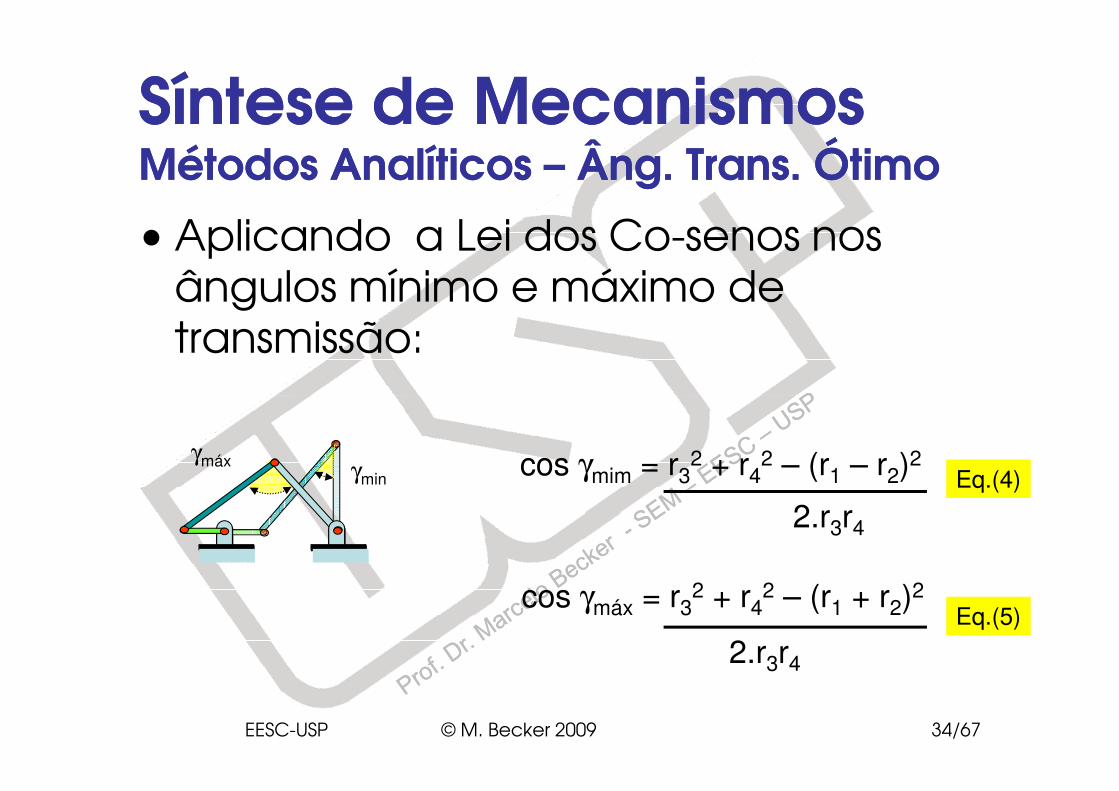
• Aplicando a Lei dos Co-senos nos ângulos mínimo e máximo de transmissão:
Síntese de MecanismosSíntese de MecanismosMétodos Analíticos Métodos Analíticos –– Âng. Trans. ÓtimoÂng. Trans. Ótimo
γmin
γmáx cos γmim = r32 + r4
2 – (r1 – r2)2
2.r3r4
cos γmáx = r32 + r4
2 – (r1 + r2)2
2.r3r4
Eq.(4)
Eq.(5)
EESC-USP © M. Becker 2009 34/67

γmin
• Resolvendo as Eqs. 1 a 5 simultaneamente:
Síntese de MecanismosSíntese de MecanismosMétodos Analíticos Métodos Analíticos –– Âng. Trans. ÓtimoÂng. Trans. Ótimo
γmáxr3 = 1 – cos φ
r 2.cos2γγmin
r1 2.cos2γmin
r4 = 1 – (r3 / r1 )2
r1 1 - (r3 / r1 )2 .cos2γmin
r2 = r32 r4
2
r1 r1 r1
+ - 1
Segundo Brodell e Soni:
γ deve ser maior que 30o
EESC-USP © M. Becker 2009 35/67
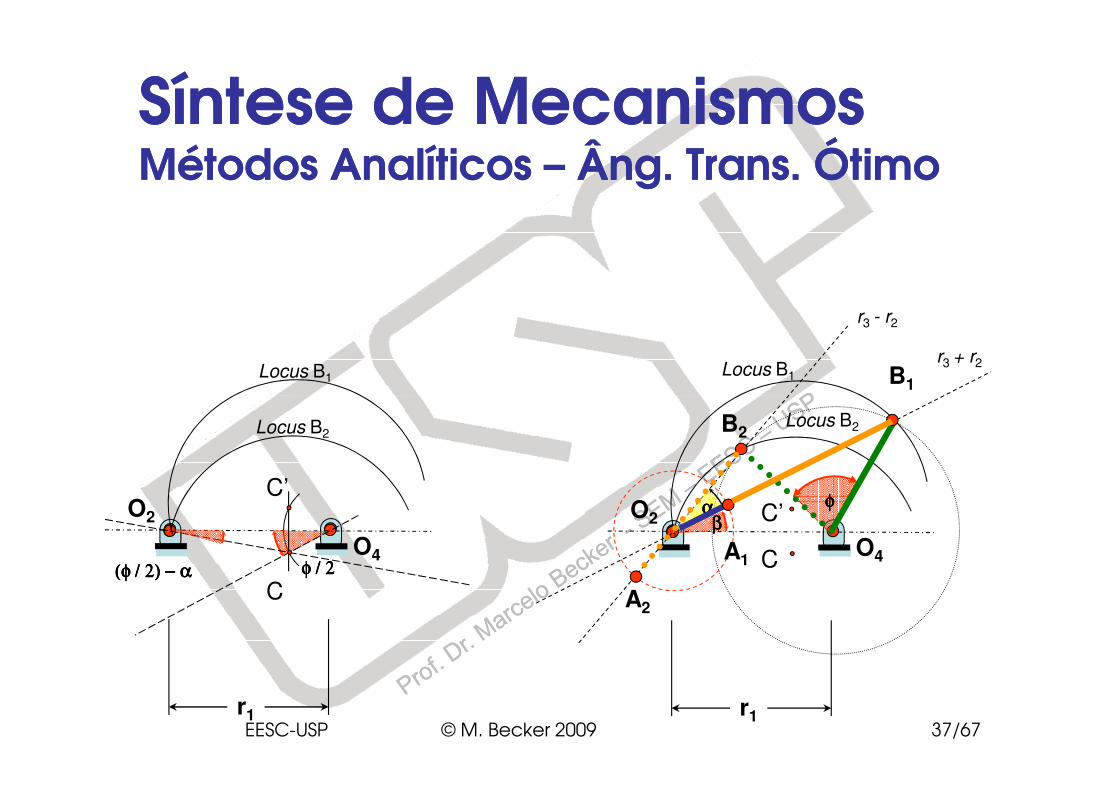
• Caso Q não seja 1, o procedimento é:– Determinar a posição de O2 e O4;– Determinar os pontos C e C’, simétricos a O2 e O4 e definidos
pelos ângulos (φ/2)-α e φ/2;– Usando C como centro e a distância CO como raio,
Síntese de MecanismosSíntese de MecanismosMétodos Analíticos Métodos Analíticos –– Âng. Trans. ÓtimoÂng. Trans. Ótimo
– Usando C como centro e a distância CO2 como raio, desenhar um arco (locus B2);
– Usando C’ como centro e a distância CO2 como raio, desenhar um arco (locus B1);
– Selecione um ponto B1 no locus B1;
– Com a distância B1O4 desenhe um arco centrado em O4marcando o ponto no locus B2.
• Estes pontos determinam as dimensões de r2 e r3.
EESC-USP © M. Becker 2009 36/67
Síntese de MecanismosSíntese de MecanismosMétodos Analíticos Métodos Analíticos –– Âng. Trans. ÓtimoÂng. Trans. Ótimo
Locus B1Locus B1 B1
r3 + r2
r3 - r2
r1
O4
O2
φ / 2φ / 2φ / 2φ / 2(φ / 2) (φ / 2) (φ / 2) (φ / 2) −−−− αααα
C
C’
Locus B2
r1
O4
O2
C
C’
Locus B2
ααααββββ
φφφφ
B2
A2
A1
EESC-USP © M. Becker 2009 37/67
Síntese de MecanismosSíntese de MecanismosMétodo Método OverlayOverlay
• Método rápido e fácil
• Nem sempre é possível obter uma soluçãosolução
• Acuracidade pode ser baixa
• Teoricamente pode-se empregar quantos pontos se desejar...
EESC-USP © M. Becker 2009 38/67

Síntese de MecanismosSíntese de MecanismosMétodo Método Overlay Overlay -- ExemploExemplo
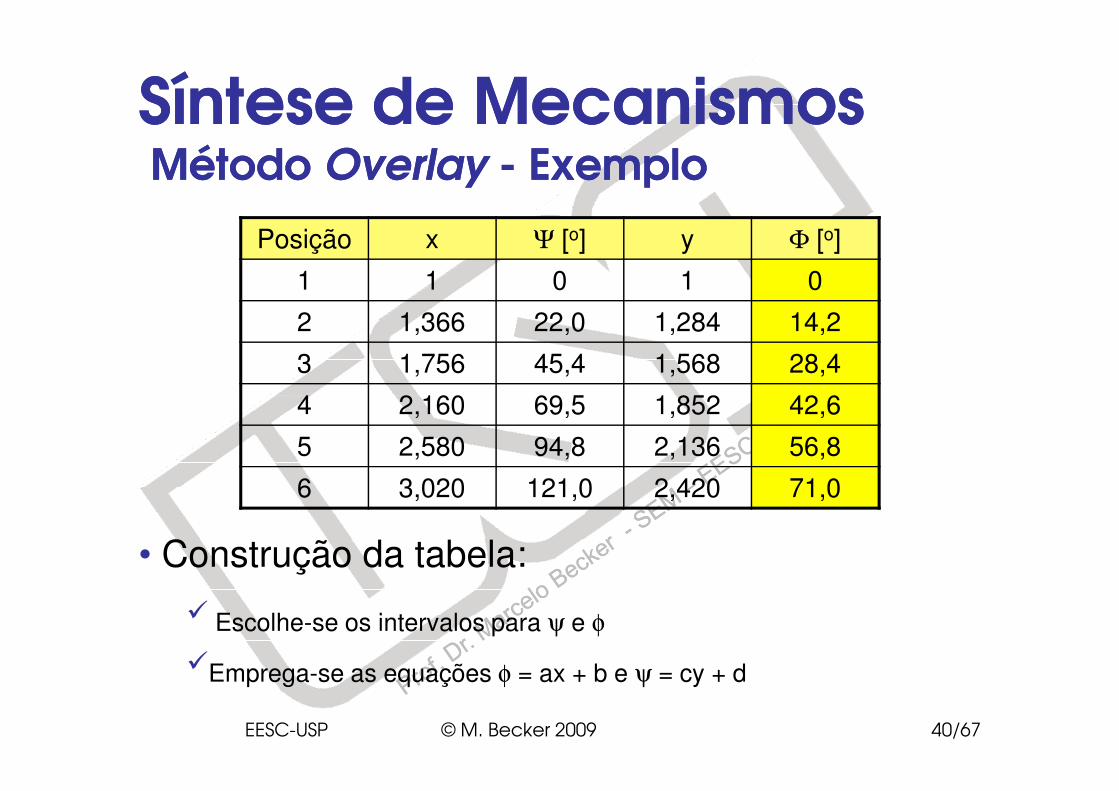
• Para a função y = x0,8 no intervalo 1 ≤ x ≤ 3:
• Escolhendo 6 pontos com espaçamento
constante da posição angular da barra de saídaconstante da posição angular da barra de saída
Posição x Ψ [o] y Φ [o]
1 1 0 1 0
2 1,366 22,0 1,284 14,2
3 1,756 45,4 1,568 28,4
4 2,160 69,5 1,852 42,6
5 2,580 94,8 2,136 56,8
6 3,020 121,0 2,420 71,0EESC-USP © M. Becker 2009 39/67
Síntese de MecanismosSíntese de MecanismosMétodo Método Overlay Overlay -- ExemploExemplo
Posição x Ψ [o] y Φ [o]
1 1 0 1 0
2 1,366 22,0 1,284 14,2
3 1,756 45,4 1,568 28,4
4 2,160 69,5 1,852 42,6
• Construção da tabela:
� Escolhe-se os intervalos para ψ e φ
�Emprega-se as equações φ = ax + b e ψ = cy + d
4 2,160 69,5 1,852 42,6
5 2,580 94,8 2,136 56,8
6 3,020 121,0 2,420 71,0
EESC-USP © M. Becker 2009 40/67
Síntese de MecanismosSíntese de MecanismosMétodo Método Overlay Overlay -- ExemploExemplo
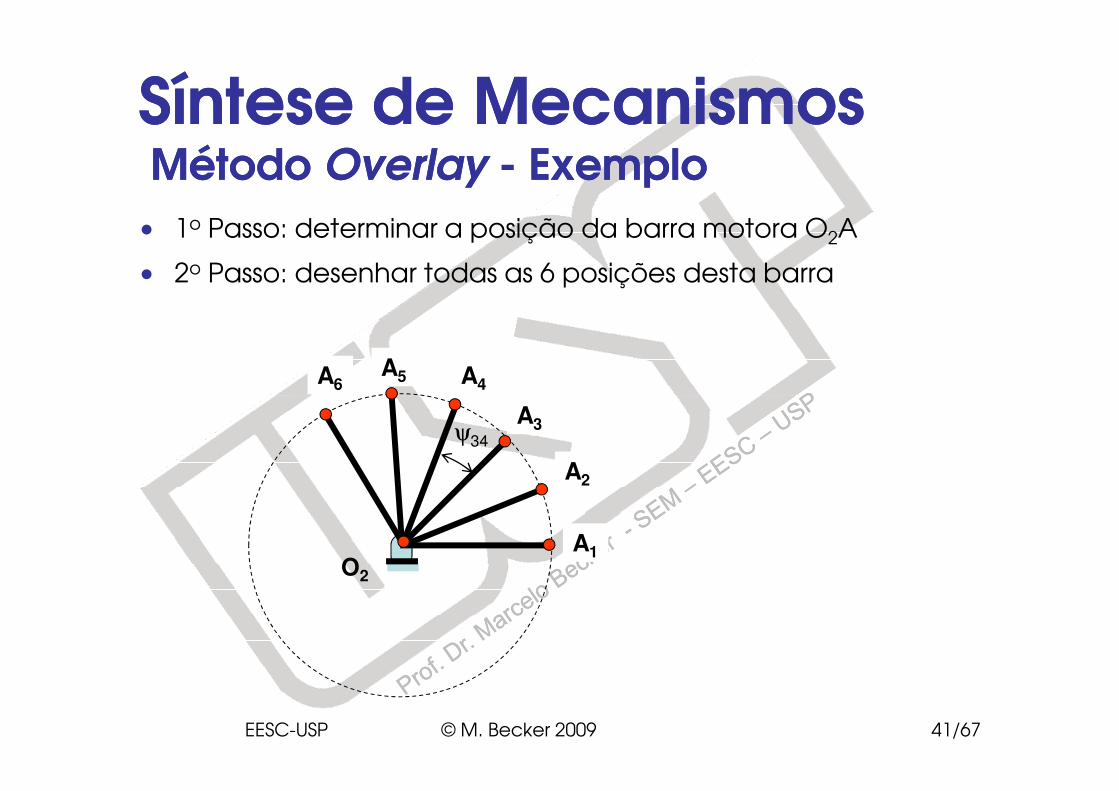
• 1o Passo: determinar a posição da barra motora O2A
• 2o Passo: desenhar todas as 6 posições desta barra
A6A5 A4
O2
A3
A2
A1
ψ34
EESC-USP © M. Becker 2009 41/67
Síntese de MecanismosSíntese de MecanismosMétodo Método Overlay Overlay -- ExemploExemplo
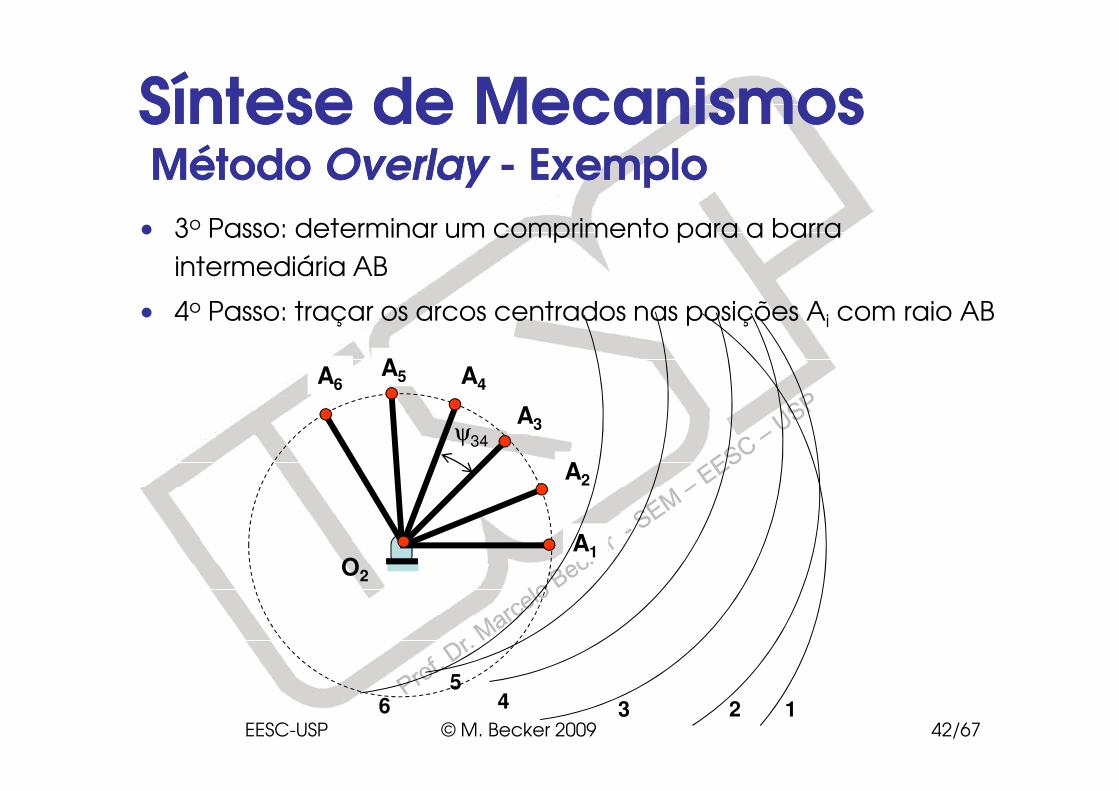
• 3o Passo: determinar um comprimento para a barra intermediária AB
• 4o Passo: traçar os arcos centrados nas posições Ai com raio AB
A6A5 A4
O2
A3
A2
A1
ψ34
12345
6EESC-USP © M. Becker 2009 42/67

Síntese de MecanismosSíntese de MecanismosMétodo Método Overlay Overlay -- ExemploExemplo
• 5o Passo: traçar todas as posições da barra O4B, cujo comprimento é desconhecido, com raios igualmente espaçados.
6
5
O4
4
3
2
1
φ34
EESC-USP © M. Becker 2009 43/67
Síntese de MecanismosSíntese de MecanismosMétodo Método Overlay Overlay -- ExemploExemplo
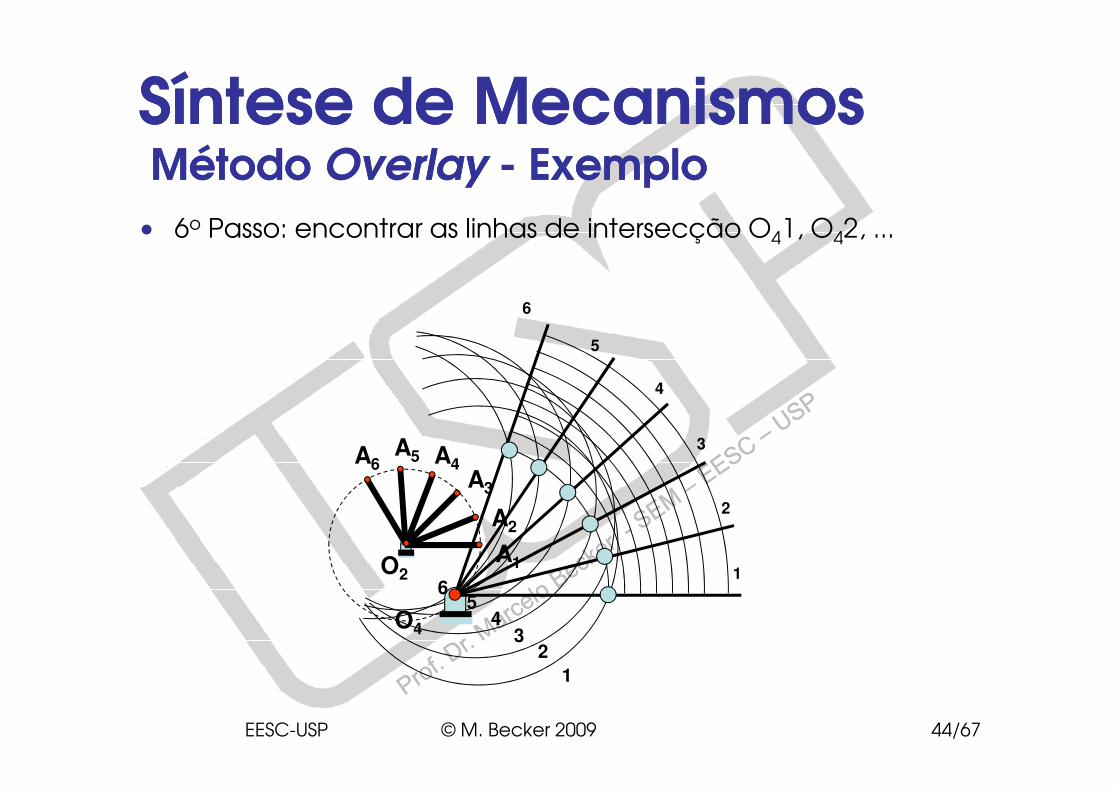
• 6o Passo: encontrar as linhas de intersecção O41, O42, ...
6
5
4
O2
A6A5 A4
A3
A2
A1
1
23
45
6
O4
3
2
1
EESC-USP © M. Becker 2009 44/67
Síntese de MecanismosSíntese de MecanismosMétodo Método Overlay Overlay -- ExemploExemplo
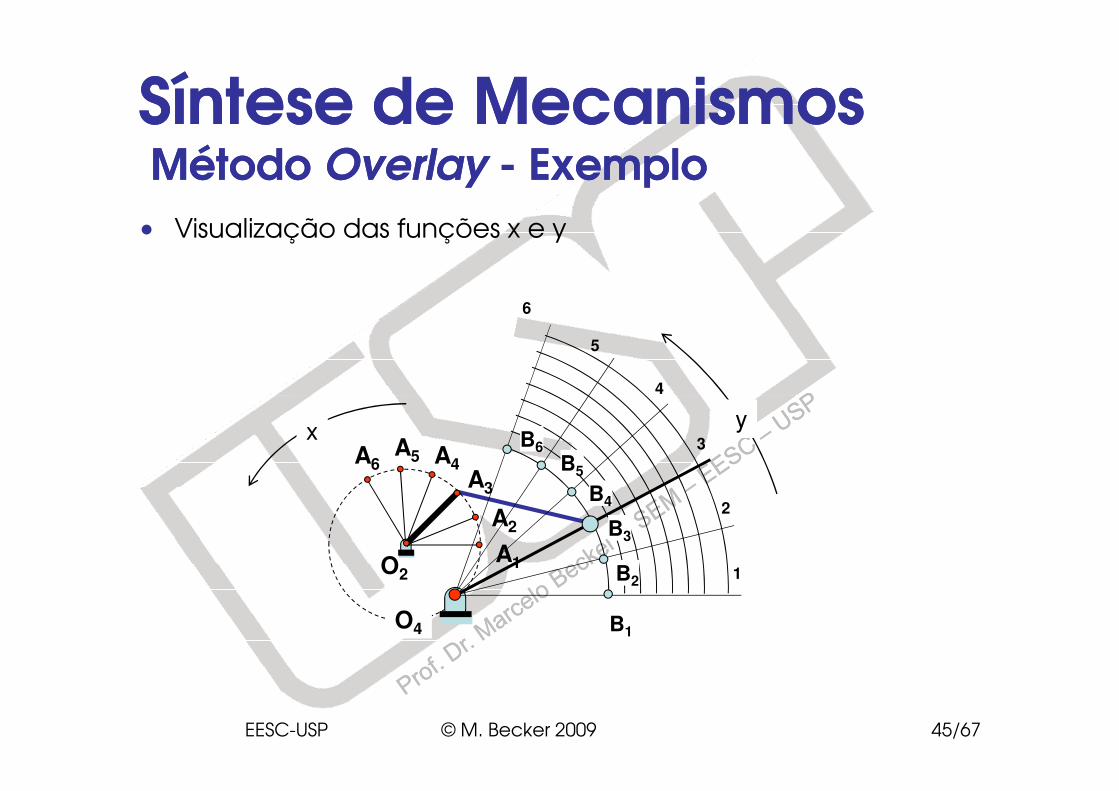
• Visualização das funções x e y
6
5
4
O2
A6A5 A4
A3
A2
A1
O4
3
2
1
B1
B2
B4
B5
B6
B3
yx
EESC-USP © M. Becker 2009 45/67
R R
R3
Imθ4
θ3
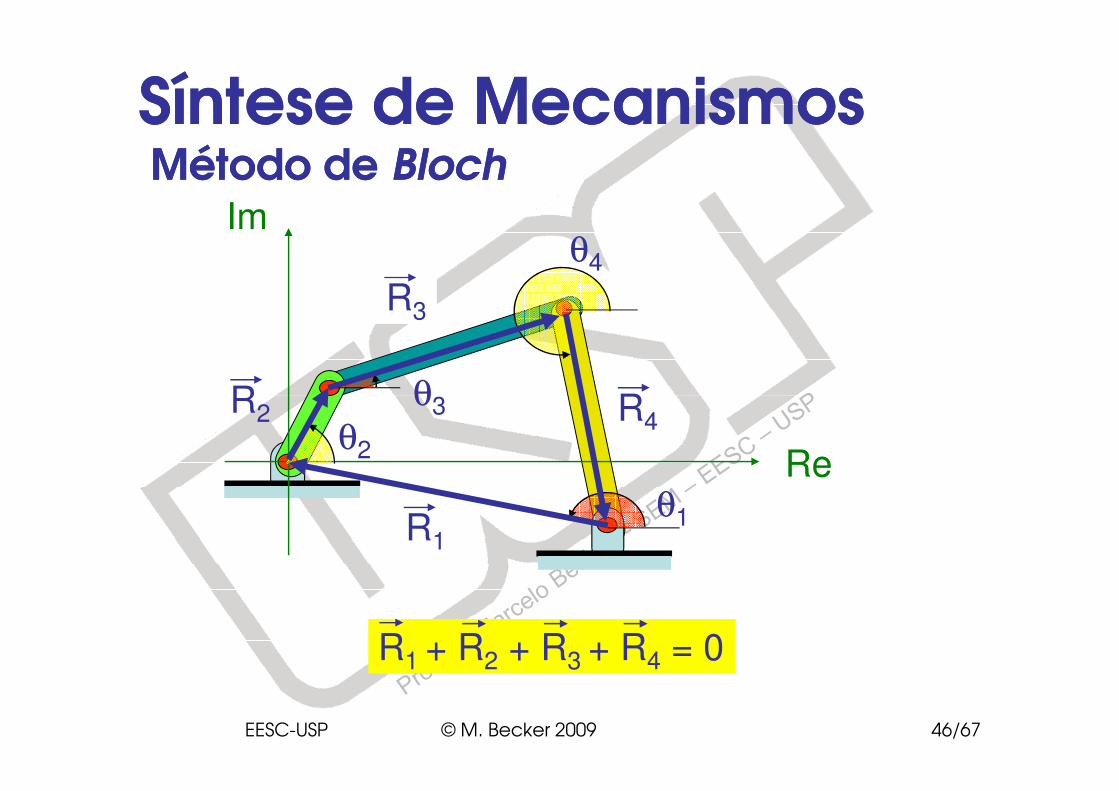
Síntese de MecanismosSíntese de MecanismosMétodo de Método de BlochBloch
R2 R4
R1
Re
R1 + R2 + R3 + R4 = 0
θ3
θ2
θ1
EESC-USP © M. Becker 2009 46/67
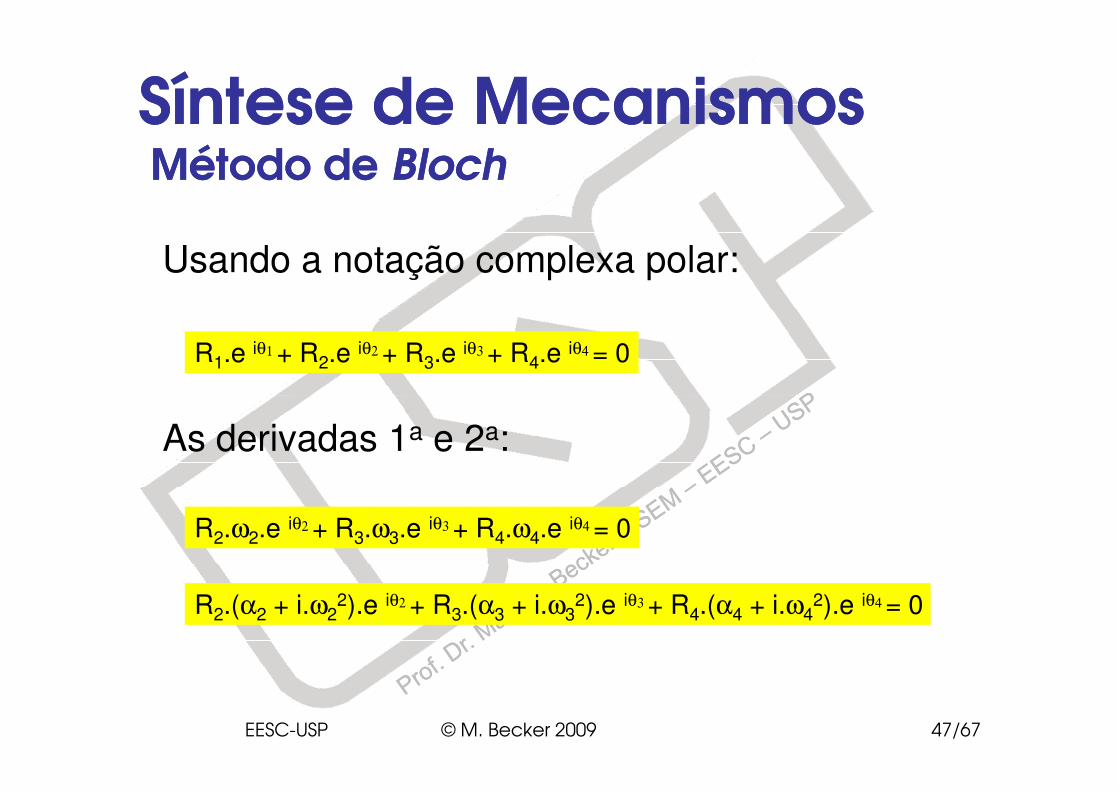
Síntese de MecanismosSíntese de MecanismosMétodo de Método de BlochBloch
Usando a notação complexa polar:
R1.e iθ1 + R2.e iθ2 + R3.e iθ3 + R4.e iθ4 = 0
As derivadas 1a e 2a:
R2.ω2.e iθ2 + R3.ω3.e iθ3 + R4.ω4.e iθ4 = 0
R2.(α2 + i.ω22).e iθ2 + R3.(α3 + i.ω3
2).e iθ3 + R4.(α4 + i.ω42).e iθ4 = 0
EESC-USP © M. Becker 2009 47/67
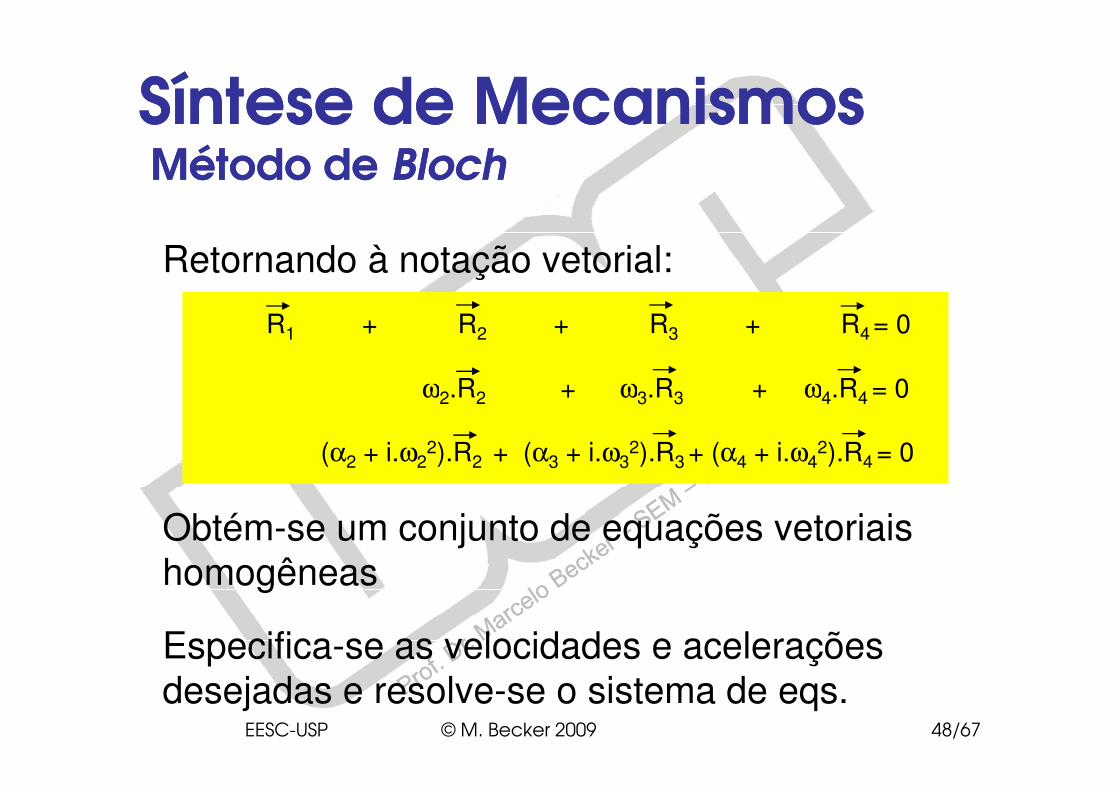
Síntese de MecanismosSíntese de MecanismosMétodo de Método de BlochBloch
Retornando à notação vetorial:
R1 + R2 + R3 + R4 = 0
ω2.R2 + ω3.R3 + ω4.R4 = 0
Obtém-se um conjunto de equações vetoriais
homogêneas
Especifica-se as velocidades e acelerações
desejadas e resolve-se o sistema de eqs.
(α2 + i.ω22).R2 + (α3 + i.ω3
2).R3 + (α4 + i.ω42).R4 = 0
ω2.R2 + ω3.R3 + ω4.R4 = 0
EESC-USP © M. Becker 2009 48/67
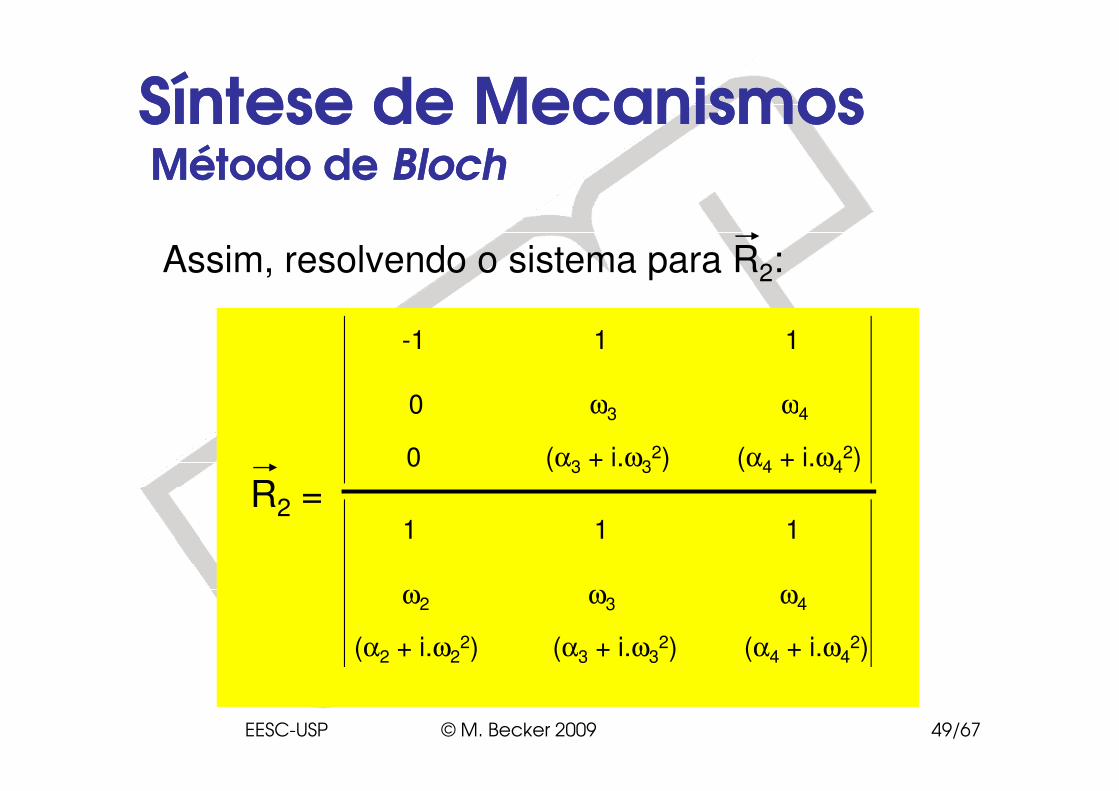
Síntese de MecanismosSíntese de MecanismosMétodo de Método de BlochBloch
Assim, resolvendo o sistema para R2:
-1 1 1
0 ω ω
0 (α3 + i.ω32) (α4 + i.ω4
2)
0 ω3 ω4
(α2 + i.ω22) (α3 + i.ω3
2) (α4 + i.ω42)
1 1 1
ω2 ω3 ω4
R2 =
EESC-USP © M. Becker 2009 49/67
Síntese de MecanismosSíntese de MecanismosMétodo de Método de BlochBloch
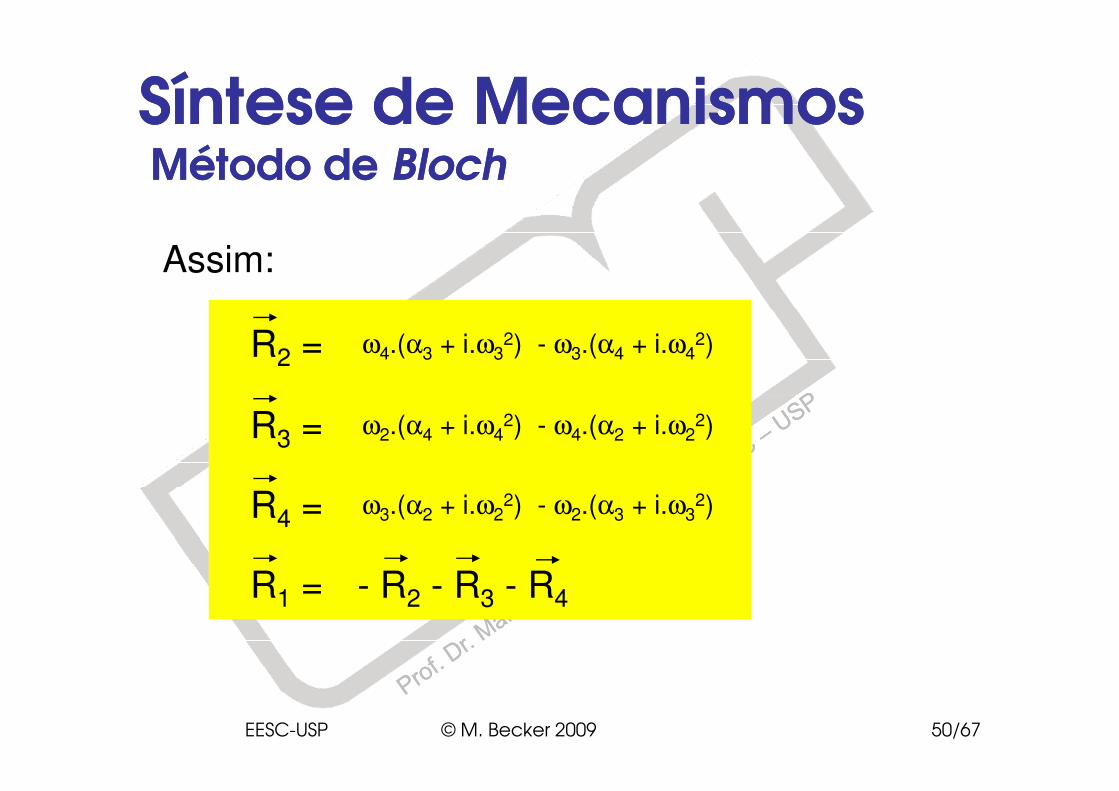
Assim:
ω4.(α3 + i.ω32) - ω3.(α4 + i.ω4
2)R2 =
ω2.(α4 + i.ω42) - ω4.(α2 + i.ω2
2)R3 =
ω3.(α2 + i.ω22) - ω2.(α3 + i.ω3
2)R4 =
R1 = - R2 - R3 - R4
EESC-USP © M. Becker 2009 50/67
Síntese de MecanismosSíntese de MecanismosEquação de Equação de FreudensteinFreudenstein
R R
R3
Imθ4
θ3R2 R4
R1
Re
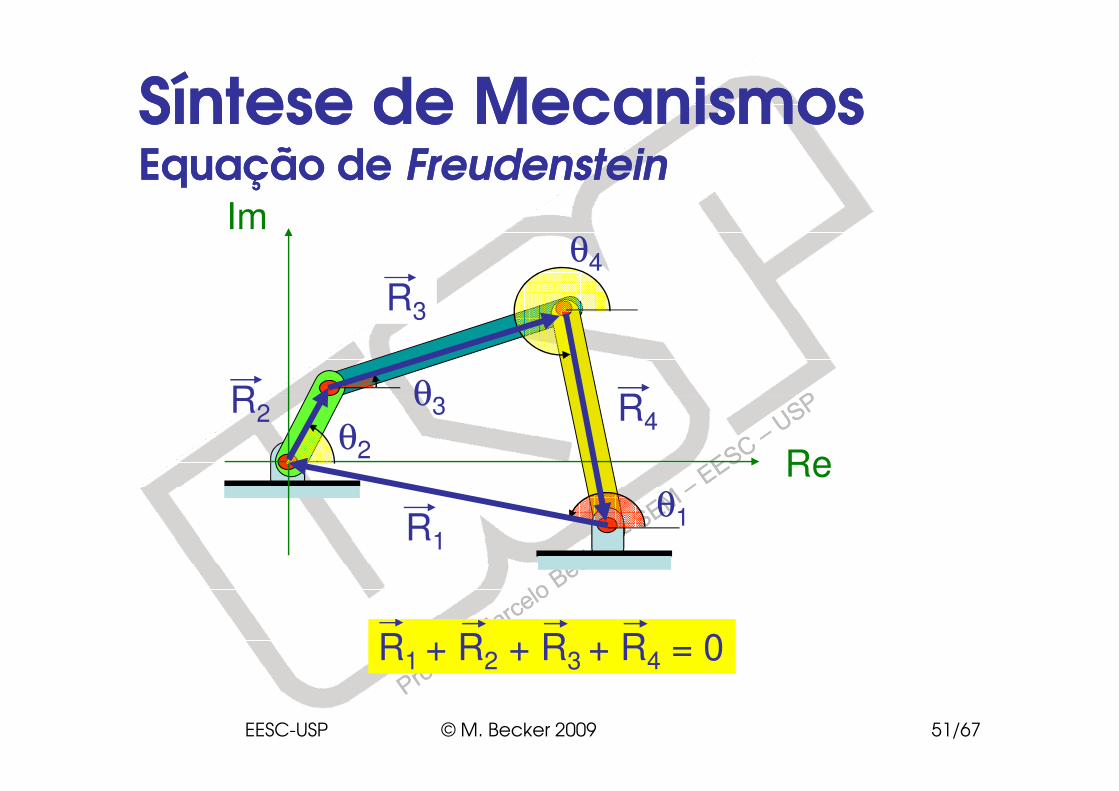
R1 + R2 + R3 + R4 = 0
θ3
θ2
θ1
EESC-USP © M. Becker 2009 51/67
Síntese de MecanismosSíntese de MecanismosEquação de Equação de FreudensteinFreudenstein
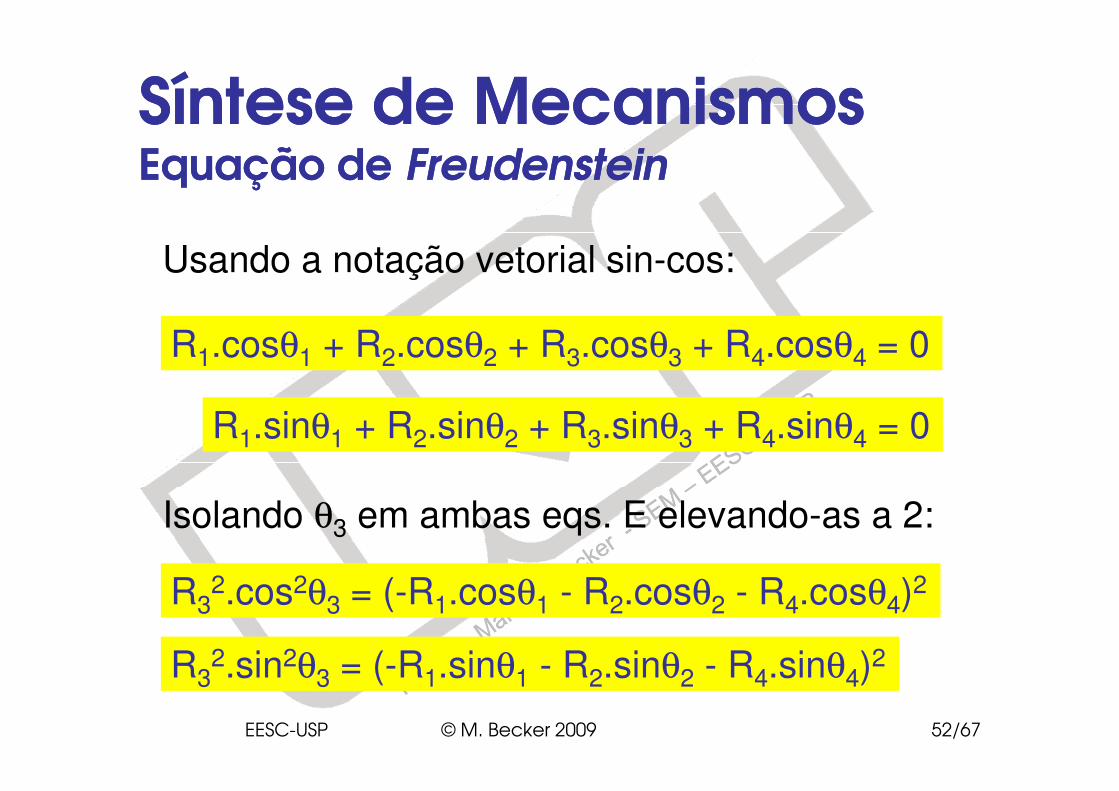
R1.cosθ1 + R2.cosθ2 + R3.cosθ3 + R4.cosθ4 = 0
Usando a notação vetorial sin-cos:
Isolando θ3 em ambas eqs. E elevando-as a 2:
R1.sinθ1 + R2.sinθ2 + R3.sinθ3 + R4.sinθ4 = 0
R32.cos2θ3 = (-R1.cosθ1 - R2.cosθ2 - R4.cosθ4)
2
R32.sin2θ3 = (-R1.sinθ1 - R2.sinθ2 - R4.sinθ4)
2
EESC-USP © M. Becker 2009 52/67

Síntese de MecanismosSíntese de MecanismosEquação de Equação de FreudensteinFreudenstein
Somando as 2 equações:
R32 = R1
2 + R22 + R4
2 + 2.R1.R2.(cosθ1.cosθ2 + sinθ1.sinθ2) +...
... + 2.R1.R4 .(cosθ1.cosθ4 + sinθ1.sinθ4) +...
... + 2.R .R .(cosθ .cosθ + sinθ .sinθ )
Note que : cosθa.cosθb + sinθa.sinθb = cos(θa-θb)
Dividindo a expressão por 2.R2.R4:
... + 2.R2.R4.(cosθ2.cosθ4 + sinθ2.sinθ4)
R32 - R1
2 - R22 - R4
2 + R1.cos(θ1- θ2) + R1.cos (θ1- θ4) = cos(θ2-θ4)
2. R2.R4 R4 R2
EESC-USP © M. Becker 2009 53/67

Síntese de MecanismosSíntese de MecanismosEquação de Equação de FreudensteinFreudenstein
R32 - R1
2 - R22 - R4
2 + R1.cosθ2 + R1.cosθ4 = cos(θ2-θ4)
Supondo que θ1 = 0, tem-se:
Substituindo os índices Ki:
2. R2.R4 R4 R2
K1 K2 K3
K1 + K2.cosθ2 + K3.cosθ4 = cos(θ2-θ4)
EESC-USP © M. Becker 2009 54/67
Síntese de MecanismosSíntese de MecanismosEquação de Equação de FreudensteinFreudenstein
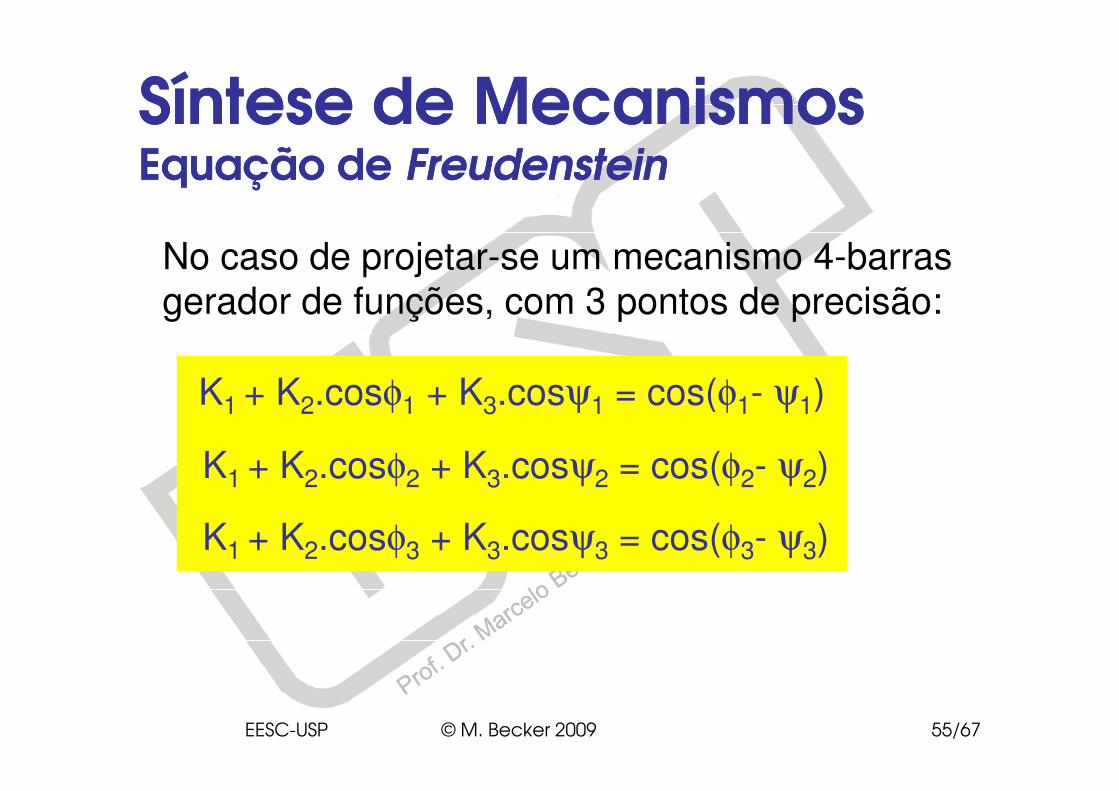
K1 + K2.cosφ1 + K3.cosψ1 = cos(φ1- ψ1)
No caso de projetar-se um mecanismo 4-barras
gerador de funções, com 3 pontos de precisão:
K1 + K2.cosφ1 + K3.cosψ1 = cos(φ1- ψ1)
K1 + K2.cosφ2 + K3.cosψ2 = cos(φ2- ψ2)
K1 + K2.cosφ3 + K3.cosψ3 = cos(φ3- ψ3)
EESC-USP © M. Becker 2009 55/67
•• IntroduçãoIntrodução•• Tipos de SínteseTipos de Síntese
•• Erros de TrajetóriaErros de Trajetória
Sumário da AulaSumário da Aula
•• Erros de TrajetóriaErros de Trajetória
•• Erros EstruturaisErros Estruturais
•• Síntese de MecanismosSíntese de Mecanismos
•• ExemplosExemplos
• Bibliografia RecomendadaEESC-USP © M. Becker 2009 56/67
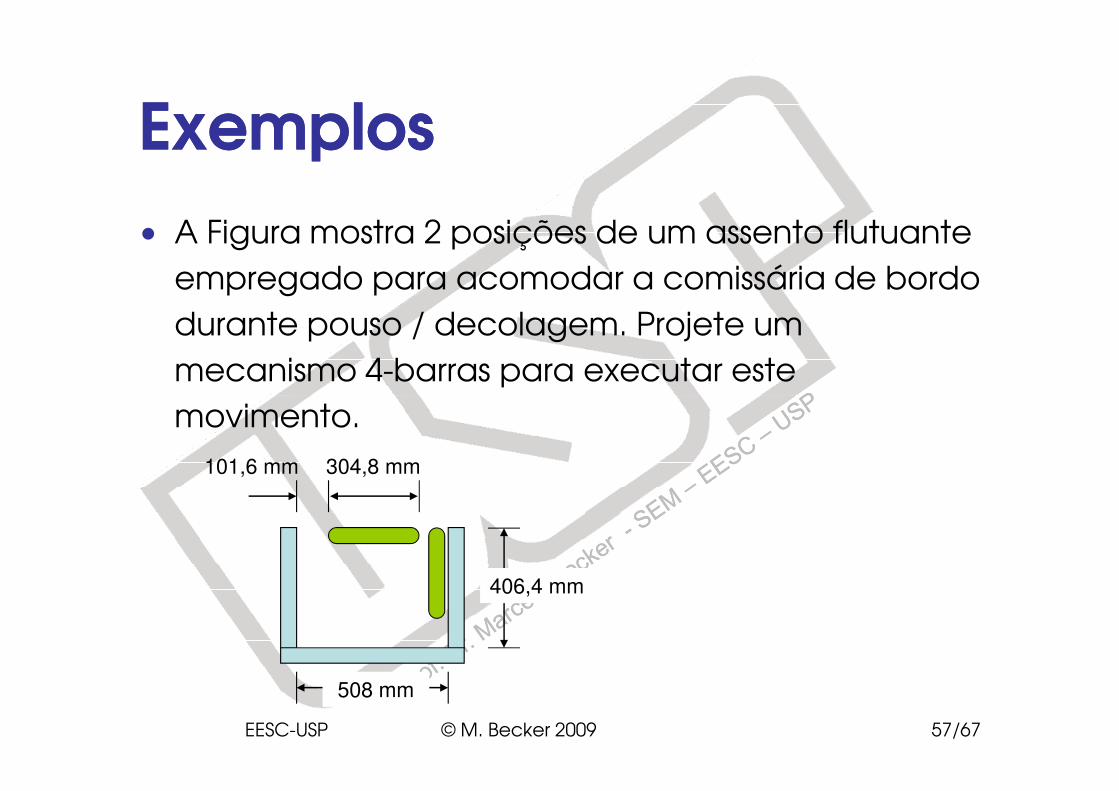
ExemplosExemplos• A Figura mostra 2 posições de um assento flutuante
empregado para acomodar a comissária de bordo durante pouso / decolagem. Projete um mecanismo 4-barras para executar este movimento.
508 mm
406,4 mm
304,8 mm 101,6 mm
EESC-USP © M. Becker 2009 57/67
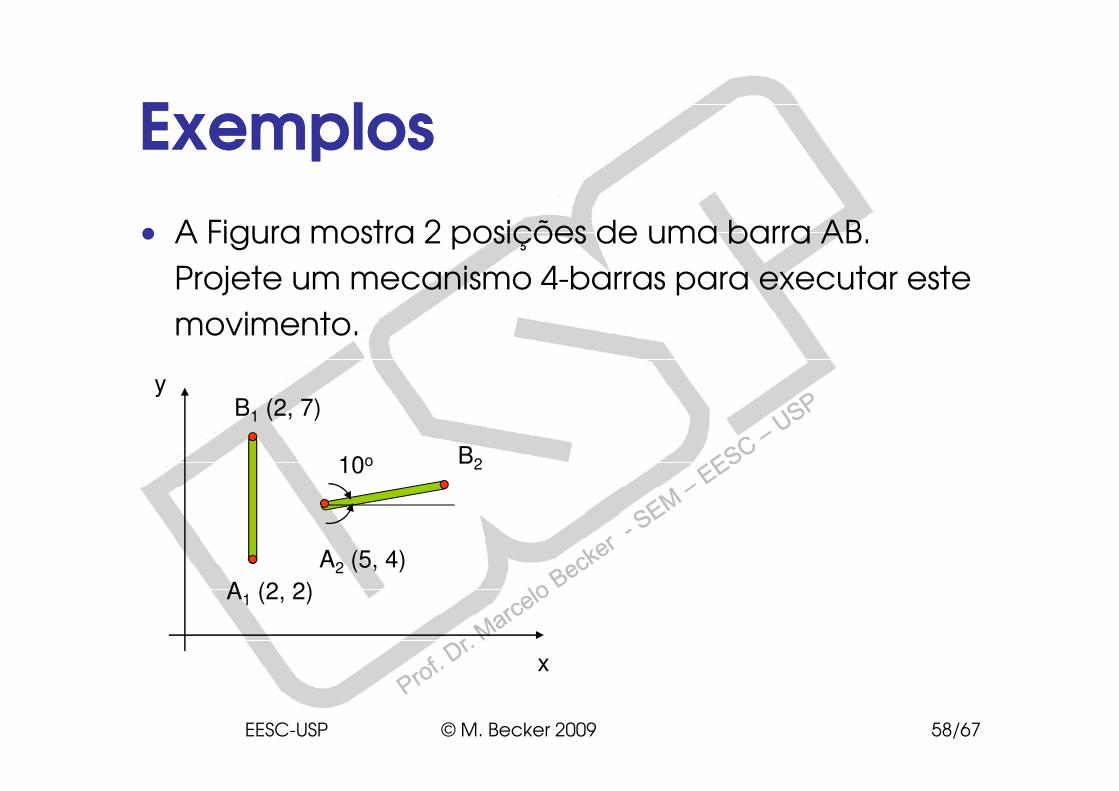
ExemplosExemplos• A Figura mostra 2 posições de uma barra AB.
Projete um mecanismo 4-barras para executar este movimento.
yB (2, 7)
x
yB1 (2, 7)
B2
A2 (5, 4)
A1 (2, 2)
10o
EESC-USP © M. Becker 2009 58/67
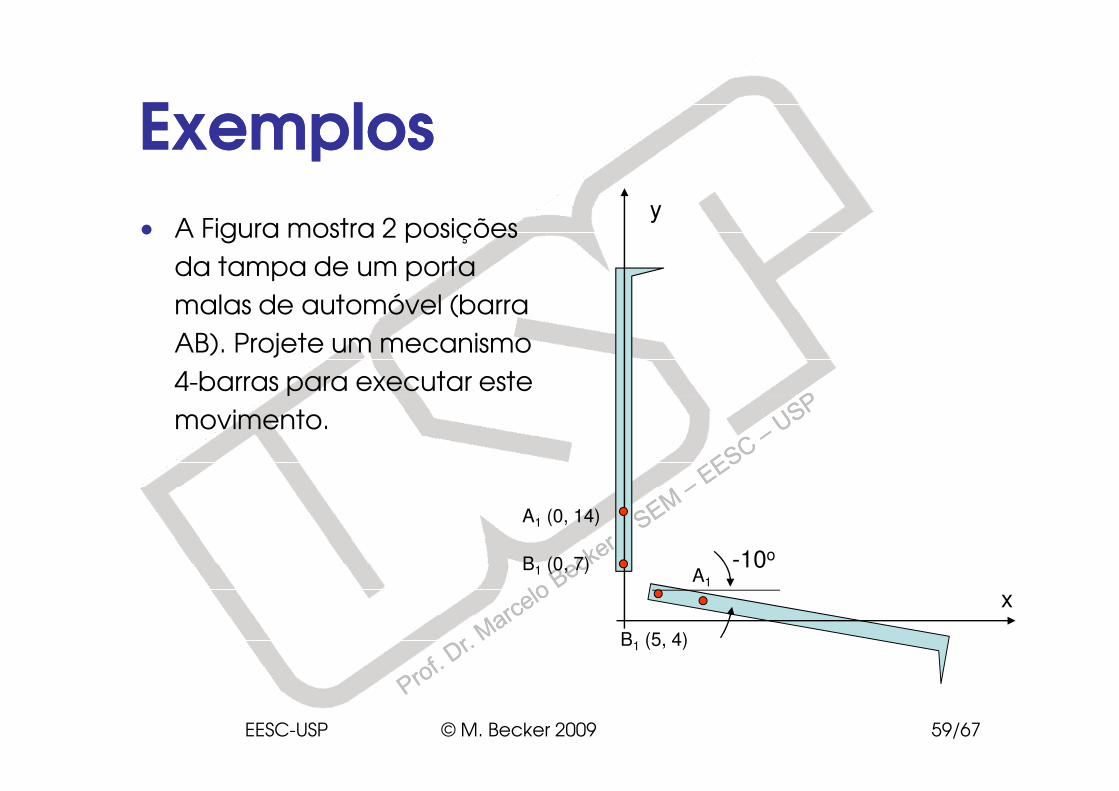
ExemplosExemplos• A Figura mostra 2 posições
da tampa de um porta malas de automóvel (barra AB). Projete um mecanismo 4-barras para executar este
y
4-barras para executar este movimento.
x
B1 (0, 7)
B1 (5, 4)
A1
A1 (0, 14)
-10o
EESC-USP © M. Becker 2009 59/67
ExemplosExemplos• Projete um mecanismo 4-barras utilizando o
método de Bloch que produza os seguintes valores de velocidade e aceleração
ω = 200 rad/s α = 0 rad/s2ω2 = 200 rad/s
ω3 = 85 rad/s
ω4 = 130 rad/s
α2 = 0 rad/s2
α3 = -1000 rad/s2
α4 = -16000 rad/s2
EESC-USP © M. Becker 2009 60/67
ExemplosExemplos• Projete um mecanismo 4-barras utilizando o
método de Freudenstein e espaçamento de Chebychev com 3 pontos de precisão que produza um gerador de funções para a seguinte equação:
y = 1/x para 1 ≤ x ≤ 2
EESC-USP © M. Becker 2009 61/67
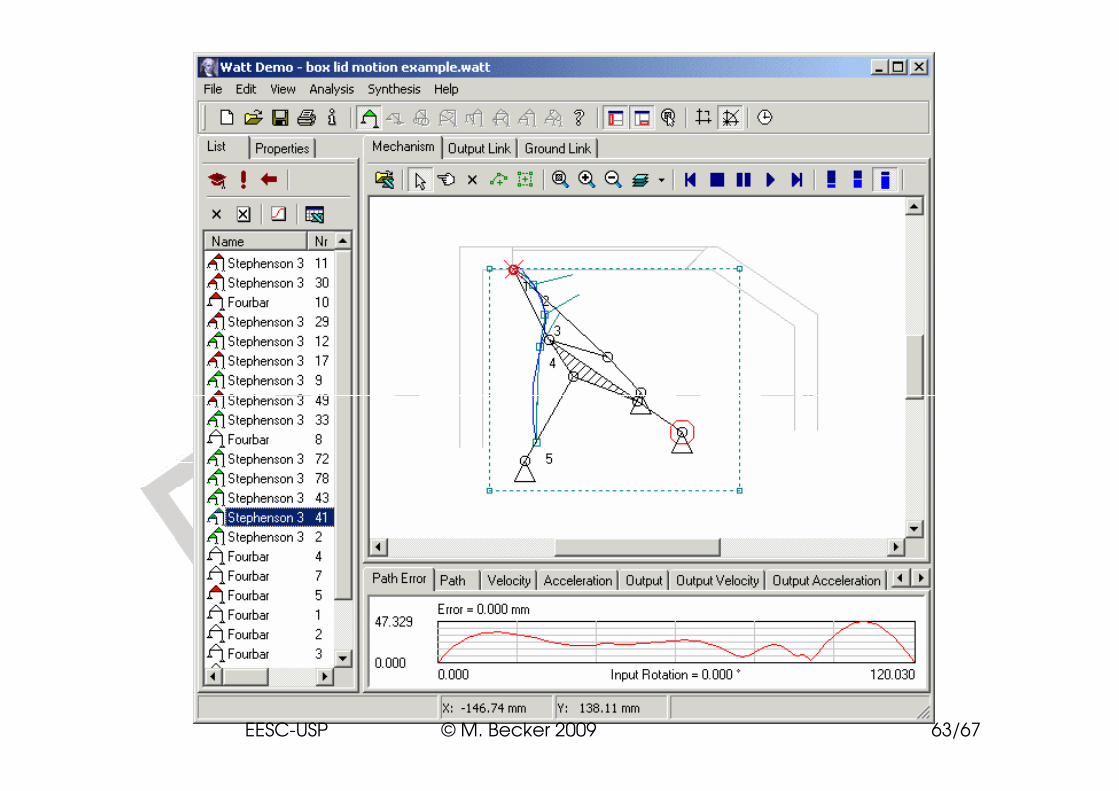
Exemplo de SoftwareExemplo de SoftwareWatt Watt –– Heron Heron TechnologiesTechnologies
• Programa para Síntese de Mecanismos
– Importa desenhos tipo CAD
– Síntese por Trajetória
– Rank em função dos erros de trajetória– Rank em função dos erros de trajetória
– Cinemática:• Trajetória
• Velocidade
• Aceleração
EESC-USP © M. Becker 2009 62/67
EESC-USP © M. Becker 2009 63/67

Exemplo de SoftwareExemplo de SoftwareRoberts Roberts –– Heron Heron TechnologiesTechnologies
• Programa para análise de mecanismos
– Importa desenhos tipo CAD
– Cinemática e Dinâmica• Posições• Posições
• Velocidades
• Acelerações
• Forças
• Torques
EESC-USP © M. Becker 2009 64/67
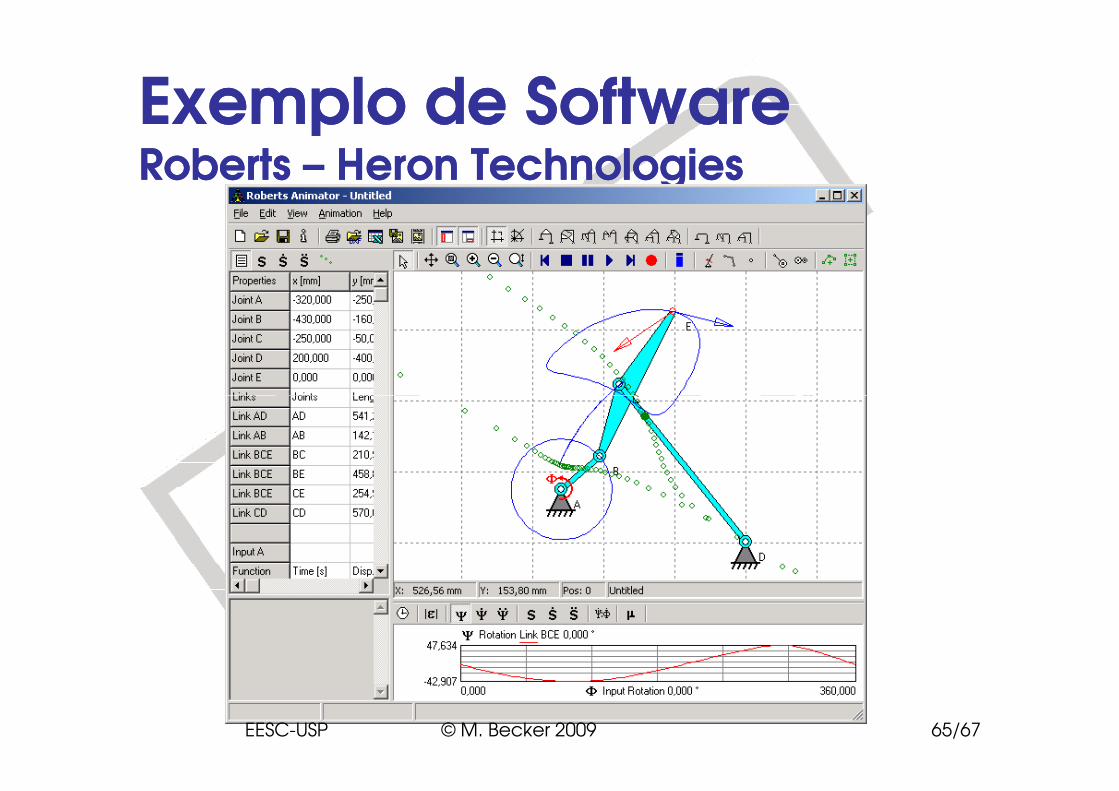
Exemplo de SoftwareExemplo de SoftwareRoberts Roberts –– Heron Heron TechnologiesTechnologies
EESC-USP © M. Becker 2009 65/67
•• IntroduçãoIntrodução•• Tipos de SínteseTipos de Síntese
•• Erros de TrajetóriaErros de Trajetória
Sumário da AulaSumário da Aula
•• Erros de TrajetóriaErros de Trajetória
•• Erros EstruturaisErros Estruturais
•• Síntese de MecanismosSíntese de Mecanismos
•• ExemplosExemplos
•• Bibliografia Bibliografia RecomendadaRecomendadaEESC-USP © M. Becker 2009 66/67
Bibliografia RecomendadaBibliografia Recomendada
• Shigley, JE. e Uicker, JJ., 1995, “Theory of Machines
and Mechanisms”.• MABIE, H.H., OCVIRK, F.W. “Mecanismos e dinâmica
das máquinas”. • MARTIN, G.H. “Cinematics and dynamics of
EESC-USP © M. Becker 2009 67/67
• MARTIN, G.H. “Cinematics and dynamics of machines”.
• NORTON, R. “Machinery dynamics”.
• Notas de Aula