Sergio Kenji Moriguchi - repositorio.unicamp.br · Ao CNPq e a FAPESP pelo apoio ao projeto DRONI...
146
UNIVERSIDADE ESTADUAL DE CAMPINAS Faculdade de Engenharia Mecânica Sergio Kenji Moriguchi Controle não linear de dirigíveis por Backstepping e Sliding Modes CAMPINAS 2017
Transcript of Sergio Kenji Moriguchi - repositorio.unicamp.br · Ao CNPq e a FAPESP pelo apoio ao projeto DRONI...
UNIVERSIDADE ESTADUAL DE CAMPINASFaculdade de Engenharia Mecânica
Sergio Kenji Moriguchi
Controle não linear de dirigíveis porBackstepping e Sliding Modes
CAMPINAS
2017
Sergio Kenji Moriguchi
Controle não linear de dirigíveis porBackstepping e Sliding Modes
Tese de doutorado apresentada à Faculdade deEngenharia Mecânica como parte dos requisitosexigidos para a obtenção do título de Doutor emEngenharia Mecânica, na Área de concentraçãode Mecânica dos Sólidos e Projeto Mecânico.
Orientador: Prof. Dr. Ely Carneiro de Paiva
ESTE EXEMPLAR CORRES-PONDE À VERSÃO FINAL DATESE DEFENDIDA PELO ALUNOSERGIO KENJI MORIGUCHI, EORIENTADA PELO PROF. DR. ELYCARNEIRO DE PAIVA
CAMPINAS
2017
Agência(s) de fomento e nº(s) de processo(s): Não se aplica.ORCID: http://orcid.org/http://orcid.org/00
Ficha catalográficaUniversidade Estadual de Campinas
Biblioteca da Área de Engenharia e ArquiteturaLuciana Pietrosanto Milla - CRB 8/8129
Moriguchi, Sergio Kenji, 1965- M825c MorControle não linear de dirigíveis por backstepping e sliding modes / Sergio
Kenji Moriguchi. – Campinas, SP : [s.n.], 2017.
MorOrientador: Ely Carneiro de Paiva. MorTese (doutorado) – Universidade Estadual de Campinas, Faculdade de
Engenharia Mecânica.
Mor1. Voo - Controle. 2. Teoria do controle. 3. Controle por modo deslizante. 4.
Dirigiveis mais pesados que o ar. 5. Teoria do controle não-linear. I. Paiva, ElyCarneiro de,1965-. II. Universidade Estadual de Campinas. Faculdade deEngenharia Mecânica. III. Título.
Informações para Biblioteca Digital
Título em outro idioma: Non linear backstepping and sliding modes control for airshipsPalavras-chave em inglês:Flight - ControlTheory of controlSliding mode controlHeavier than airTheory of nonlinear controlÁrea de concentração: Mecânica dos Sólidos e Projeto MecânicoTitulação: Doutor em Engenharia MecânicaBanca examinadora:Ely Carneiro de Paiva [Orientador]Alim Pedro de Castro GonçalvesAndré Ricardo FioravantiJosé Reginaldo Hughes CarvalhoLuiz Carlos Sandoval GóesData de defesa: 23-06-2017Programa de Pós-Graduação: Engenharia Mecânica
Powered by TCPDF (www.tcpdf.org)
UNIVERSIDADE ESTADUAL DE CAMPINAS
FACULDADE DE ENGENHARIA MECÂNICACOMISSÃO DE PÓS-GRADUAÇÃO EM ENGENHARIA
MECÂNICA
DEPARTAMENTO DE SISTEMAS INTEGRADOS
TESE DE DOUTORADO
Controle não linear de dirigíveis porBackstepping e Sliding Modes
Autor: Sergio Kenji Moriguchi RA: 109608Orientador: Prof. Dr. Ely Carneiro de Paiva
A Banca Examinadora composta pelos membros abaixo aprovou esta Tese:
Prof. Dr. Ely Carneiro de Paiva, PresidenteFEM/UNICAMP
Prof. Dr. Alim Pedro de Castro GonçalvesFEEC/UNICAMP
Prof. Dr. André Ricardo FioravantiFEM/UNICAMP
Prof. Dr. José Reginaldo Hughes CarvalhoUFAM/Manaus/AM
Prof. Dr. Luiz Carlos Sandoval GóesITA/São José dos Campos/SP
A Ata da defesa com as respectivas assinaturas dos membros encontra-se no processo de vidaacadêmica do aluno.
Campinas, 23 de junho de 2017.

Dedicatória
AOS MEUS PAIS E MEUS QUERIDOS
IRMÃOS QUE TUDO FIZERAM POR
MIM AO LONGO DE MINHA VIDA.DESEJO PODER TER SIDO MERECE-DOR DO ESFORÇO REALIZADO POR
VOCÊS EM TODOS OS ASPECTOS, EM
ESPECIAL QUANTO À MINHA FOR-MAÇÃO.
Agradecimentos
Agradeço,
ao Professor Ely Paiva pela imensurável orientação e pela oportunidade que me deu de chegarao final deste trabalho, me conduzindo a cada passo de forma admirável e exemplar.
Aos colegas de trabalho mais próximos: Márcio, Marco e Ed pela convivência descontraída eas trocas de experiências.
Aos demais colegas do Departamento de Mecânica com quem sempre pude contar com a suaamizade.
Faço um agradecimento especial à minha querida esposa Lídia com quem pude contar com umapoio incondicional. Agradeço a Deus por ter colocado todas estas pessoas em meu caminho eque me acompanharam ao longo desta jornada.
Ao CNPq e a FAPESP pelo apoio ao projeto DRONI no qual este trabalho está inserido (CNPqCT-Aeronáutico e CT-Espacial Projeto número 402112/2013-0 e Projeto Temático Fapesp-CNPq “INSAC-INCT in Applied Cooperative Autonomous Sistems” FAPESP 2014/50851-0e CNPq 465755/2014-3).
Resumo
KENJI MORIGUCHI, Sergio. Controle não linear de dirigíveis por Backstepping e SlidingModes. 2017. Tese (doutorado). Faculdade de Engenharia Mecânica, Universidade Estadual deCampinas, Campinas.
O trabalho apresentado nesta tese abrange diferentes soluções para o sistema de controlenão linear para dirigíveis autônomos, não tripulados. Em seu conteúdo está referenciada umavasta gama de aplicações para o uso de dirigíveis robóticos (não tripulados) pode ser citadacomo vigilância, inspeção, prospecção de minérios, exploração de áreas de difícil acesso e mo-nitoramento agrícola e ambiental. Sua flexibilidade é assegurada pela capacidade de decolar epousar na direção vertical, o que requer uma área reduzida, permitindo a sua operação em áreasremotas, onde não exista uma pista de pouso. Para o projeto dos controladores de voo foramestudadas estratégias de controle não linear para o problema de posicionamento em uma refe-rência fixa na terra como o Backstepping (BS) e sua combinação com o controlador por Modos
Deslizantes (SMC), conhecida como Backstepping-Modos Deslizantes (BSMC). Para viabilizaro trabalho foi utilizado um simulador validado pelo projeto AURORA e adaptado para os no-vos controladores. Este estudo baseia-se na abordagem Backstepping vetorial, que é ideal paraaplicações em sistemas mecânicos, e no controle por modos deslizantes de primeira ordem, ouModos Deslizantes clássico.
Diferentemente de outros trabalhos referenciados nesta pesquisa, o modelo utilizado dodirigível tem seis graus de liberdade e é dotado de funções que realizam a alocação de controle,calcula esforços aerodinâmicos de sustentação em função da velocidade relativa do ar incidenteno envelope e inclui um modelo de turbulência. O sistema de controle não requer a linearizaçãodo modelo do dirigível (para diferentes condições de equilíbrio) e não utiliza o desacoplamentodos movimentos lateral do longitudinal, o que permite o projeto de uma única lei de controlepara todas as fases de voo de uma missão do dirigível.
As maiores contribuições desse trabalho são: (i) o desenvolvimento de uma nova técnicade Backstepping-Modos Deslizantes para o controle não linear de um dirigível autônomo e (ii)uma comparação exaustiva do desempenho de três técnicas diferentes de controle não linearpara dirigíveis que são Backstepping, Modos Deslizantes e a técnica combinada Backstepping-
Modos Deslizantes.
Palavras-chave: 1. Controle de voo. 2. Backstepping. 3. Modos deslizantes. 4. Dirigível. 5.Modelo dinâmico.

Abstract
The work presented in this thesis covers different solutions for the nonlinear control systems forautonomous, unmanned airships. A wide range of applications for robotic (unmanned) airshipscan be cited as surveillance, inspection, ore prospecting, exploration of hard to reach areas andagricultural and environmental monitoring. Its flexibility is ensured by the ability to take offand land in the vertical direction, in wich a reduced area is needed, allowing its operation inremote areas, where there is no airstrip. For the control strategies design we have studied nonlinear controlers for the positioning problem in a fixed land reference such as Backstepping(BS) and its combination with the Sliding modes (SMC) Backstepping-sliding modes (BSMC).To make this work possible, a simulator validated by the AURORA project was used andadapted for the new controllers. This study focuses on the Vector Backstepping approach,which is ideal for applications in mechanical systems, and in control by first-order slidingmodes, or classic sliding modes. Differently from other studies referenced in this research,the airship model considered has six degrees of freedom and is endowed with functions thatperform the control allocation, calculates aerodynamic lift forces as a function of the relativevelocity of the incident air in its envelope and includes a turbulence model. The control systemdoes not require the airship model linearization (for different equilibrium conditions) anddoes not use decoupling lateral from longitudinal movement, which allows the design of anunique control law to all flight mission steps of the airship. The main contributions of thiswork are (i) development of a new Backstepping-sliding modes non linear controler techniquefor autonomous airships (ii) make an exhaustive performance comparison of three differentapproaches of non linear controlers for airships that are: Backstteping, Sliding modes and thecombination of Backstteping and Sliding modes.
Keywords: Palavras-chave em Inglês: Flight control, BackStepping, Sliding Modes, Modos des-lizantes, Airship, Dynamic model.
Lista de Ilustrações
1.1 Dirigível Sentinel-1000. Fonte: http://www.airshipsonline.com. . . . . . . . . . 201.2 Estrutura típica de um dirigível não rígido convencional. Fonte: adaptado de
http://www.airships.net/blimp-filled. . . . . . . . . . . . . . . . . . . . . . . . 221.3 Atuadores do dirigível do Projeto AURORA. Fonte: Moutinho (2007). . . . . . 251.4 Dirigível do Projeto AURORA. Fonte: Moutinho (2007). . . . . . . . . . . . . 261.5 Desalinhamento entre o centro de gravidade e o centro de flutuação em dirigí-
veis, que aumenta a complexidade do projeto de controle. Fonte: Yongmei et al.
(2011). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281.6 Fluxograma de configuração do controle de dirigíveis considerado neste trabalho. 332.1 Fluxograma do controlador do tipo Strict Feedback, (Fossen e Strand, 1999). . . 382.2 Sistema não linear de segunda ordem, com uma única não linearidade 𝑓(𝑥1) e
um integrador puro na entrada, (Fossen e Strand, 1999). . . . . . . . . . . . . . 392.3 Estabilização do sistema 𝑥1 pela função de estabilização 𝛼1 = 𝛼1(𝑥1) Fonte:
Fossen e Strand (1999). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.4 Sistema Massa-Mola-Amortecedor - MIMO. Fonte: Fossen e Strand (1999). . . 442.5 Superfície de deslizamento. Fonte: Slotine et al. (1991). . . . . . . . . . . . . . 482.6 Convergência exponencial do modo de deslizamento (𝑛 = 2). Fonte: Slotine
et al. (1991). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 502.7 Diagrama de blocos do sistema de segunda ordem (𝑛 = 2). Fonte: Hung et al.
(1993), Azcue Puma et al. (2013). . . . . . . . . . . . . . . . . . . . . . . . . 522.8 Regiões definidas pela superfície de chaveamento 𝑠(𝑥1, 𝑥2) = 0. Fonte: Hung
et al. (1993), Azcue Puma et al. (2013). . . . . . . . . . . . . . . . . . . . . . 532.9 Plano de fase do subsistema I. Fonte: Hung et al. (1993), Azcue Puma et al.
(2013). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 542.10 Plano de fase do subsistema II. Fonte: Hung et al. (1993), Azcue Puma et al.
(2013). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 542.11 Plano de fase, modos de aproximação a um ponto da superfície e deslizamento.
Fonte: Hung et al. (1993), Azcue Puma et al. (2013). . . . . . . . . . . . . . . 542.12 Plano de fase resultante da aplicação da função de chaveamento. Fonte: Hung
et al. (1993), Azcue Puma et al. (2013). . . . . . . . . . . . . . . . . . . . . . 552.13 Chattering resultante do chaveamento imperfeito do controle. Fonte: Slotine
et al. (1991). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 582.14 Diferenças entre a função sinal e de saturação. Fonte: Slotine et al. (1991). . . . 592.15 Camada limite para suavização do chattering. Fonte: Slotine et al. (1991). . . . 593.1 Ângulo de vetorização e configuração da propulsão do dirigível AURORA
AS800B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.2 Ângulos deflexão das superfícies de atuação na cauda do dirigível AURORAAS800B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.3 Sistemas de referência: inercial 𝑖 = O, 𝑥𝑖, 𝑦𝑖, 𝑧𝑖, fixo no CV (centro de vo-lume) do dirigível 𝑙 = CV, 𝑥𝑙, 𝑦𝑙, 𝑧𝑙 e do vento ou aerodinâmico 𝑎 (Azinheiraet al., 2008) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.4 Comportamento do ângulo de vetorização 𝛿𝑣 e propulsão total 𝑇𝑋 para o enve-lope de voo pairado para 1, 3 e 5𝑘𝑔 de massa pesante em função da velocidade𝑉𝑡, figura adaptada de Moutinho (2007). . . . . . . . . . . . . . . . . . . . . . 73
3.5 Valores preestabelecidos do ângulo de vetorização 𝛿𝑣 e propulsão total 𝑇𝑋 parao envelope de voo aerodinâmico para 1, 3 e 5𝑘𝑔 de massa pesante em função davelocidade 𝑉𝑡, figura adaptada de Moutinho (2007). . . . . . . . . . . . . . . . 73
3.6 Estimador de vento e de referência de guinada. Adaptada de Moutinho (2007). . 763.7 Diagrama de blocos do gerador de turbulência. Adaptada de McLean (1990). . . 784.1 Topologia do controlador Backstepping_MP em malha fechada. . . . . . . . . 914.2 Topologia do controlador Backstepping-Sliding Mode em malha fechada. . . . 924.3 Topologia do controle Modos Deslizantes em malha fechada. . . . . . . . . . . 935.1 Diagrama de blocos para o sistema em malha aberta. Adaptada de De Paiva e
Azinheira (2001). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 945.2 Diagrama de blocos para a dinâmica dos atuadores. Adaptada de De Paiva e
Azinheira (2001). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 955.3 Diagrama de blocos da vetorização dos propulsores principais. Adaptada de
De Paiva e Azinheira (2001). . . . . . . . . . . . . . . . . . . . . . . . . . . . 965.4 Diagrama de blocos das superfícies de controle de cauda. Adaptada de De Paiva
e Azinheira (2001). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 965.5 Diagrama de blocos da entrada do vento. Adaptada de De Paiva e Azinheira
(2001). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 975.6 Trajetória obtida pelo controlador Backstepping_MP - teste BS_MP_1 (Erro
MSE=665m). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1005.7 Trajetória obtida pelo controlador Backstepping_MP - teste BS_MP_2 (Erro
MSE=644m). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1005.8 Trajetória obtida pelo controlador Backstepping_MP - teste BS_MP_3 (Erro
MSE=628m). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1015.9 Sinais dos atuadores e de dinâmica na simulação com o controlador Backstep-
ping_MP - teste BS_MP_1 (Erro MSE=665m). . . . . . . . . . . . . . . . . . 1025.10 Sinais dos atuadores e de dinâmica na simulação com o controlador Backstep-
ping_MP - teste BS_MP_2 (Erro MSE=644m). . . . . . . . . . . . . . . . . . 1035.11 Sinais dos atuadores e de dinâmica na simulação com o controlador Backstep-
ping_MP - teste BS_MP_3 (Erro MSE=628m). . . . . . . . . . . . . . . . . . 104
5.12 Trajetória obtida pelo controlador Backstepping_MP - teste BS_MP_4 (ErroMSE=626m). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
5.13 Sinais dos atuadores e de dinâmica na simulação com o controlador Backstep-
ping_MP - teste BS_MP_4 (Erro MSE=626m). . . . . . . . . . . . . . . . . . 1065.14 Trajetória obtida pelo controlador Backstepping de Azinheira - teste BS_AZ2
(Erro MSE=1102m). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1085.15 Sinais dos atuadores e de dinâmica na simulação com o controlador Backstep-
ping de Azinheira - teste BS_AZ2 (Erro MSE=1102). . . . . . . . . . . . . . . 1095.16 Trajetória do dirigível com controlador BS_MP com vento com direção de in-
cidência oscilatória (Erro MSE=2796 m). . . . . . . . . . . . . . . . . . . . . 1115.17 Sinais dos atuadores e de dinâmica na simulação com o controlador BS_MP
com vento com direção de incidência oscilatória. . . . . . . . . . . . . . . . . 1125.18 Trajetória do dirigível com controlador BSMC_MP_2 com vento com direção
de incidência oscilatória (Erro MSE = 1360 m). . . . . . . . . . . . . . . . . . 1145.19 Sinais dos atuadores e de dinâmica na simulação com o controlador BSMC_MP
com vento com direção de incidência oscilatória. . . . . . . . . . . . . . . . . 1155.20 Trajetória do dirigível com controlador SMC com vento com direção de inci-
dência oscilatória (Erro MSE = 1791 m). . . . . . . . . . . . . . . . . . . . . 1165.21 Sinais dos atuadores e de dinâmica na simulação com o controlador SMC com
vento com direção de incidência oscilatória. . . . . . . . . . . . . . . . . . . . 1175.22 Gráficos comparativos do controlador BS_MP com aplicação do modelo aero-
dinâmico sob vento com direção de incidência oscilante. . . . . . . . . . . . . 1195.23 Gráficos comparativos do controlador BSMC_MP com aplicação do modelo
aerodinâmico sob vento com direção de incidência oscilante. . . . . . . . . . . 1205.24 Gráficos comparativos do controlador SMC com aplicação do modelo aerodi-
nâmico sob vento com direção de incidência oscilante. . . . . . . . . . . . . . 1215.25 Comparação entre os controladores Backstepping_MP (Erro MSE=626m) e
Backstepping de Azinheira (Azinheira et al., 2008) (Erro MSE=1102m). . . . . 1235.26 Comparação entre os controladores Backstepping_MP, Backstepping-Modos
Deslizantes_MP e Modos Deslizantes_MP. . . . . . . . . . . . . . . . . . . . . 125A.1 Sistemas de coordenadas, orientação e posicionamento. Fonte: Moutinho (2007). 142A.2 Sistemas de coordenadas centrados no dirigível - ABC e Aerodinâmico. Fonte:
Moutinho (2007). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
Lista de Tabelas
4.1 Variáveis auxiliares para os controladores projetados . . . . . . . . . . . . . . 864.2 Funções de Lyapunov para os controladores projetados . . . . . . . . . . . . . 874.3 Termos de aceleração utilizados na formação dos controladores projetados . . . 874.4 Termos de z2 utilizados na formação dos controladores projetados . . . . . . . 884.5 Leis dos controladores projetados . . . . . . . . . . . . . . . . . . . . . . . . . 885.1 Erro MSE (m) obtido com a simulação utilizando o controlador BS_MP
variando-se Λ1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 985.2 Efeito da variação de altitude em função do tempo para diferentes ganhos Λ11
do controlador BS_MP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1015.3 Erro MSE (m) obtido com a simulação utilizando o controlador BS_MP
variando-se Λ2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1055.4 Erro MSE (m) obtido com a simulação utilizando o controlador Backstepping
de Azinheira variando-se Λ𝐴𝑍 . . . . . . . . . . . . . . . . . . . . . . . . . . . 1085.5 Erro MSE (m) obtido com a simulação utilizando o controlador Backstepping de
Azinheira com a variação do primeiro elemento da diagonal principal do ganhoΛ𝐴𝑍 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5.6 Erro MSE (m) obtido com a simulação utilizando o controlador BS_MP sub-metido à vento com direção de incidência oscilatória variando-se Λ2. . . . . . 110
5.7 Erro MSE (m) obtido com a simulação utilizando o controlador BSMC_MPsubmetido à vento com direção de incidência oscilatória variando-se Λ𝑠. . . . . 113
5.8 Erro MSE (m) obtido com a simulação utilizando o controlador SMC submetidoà vento com direção de incidência oscilatória variando-se Λ𝑠. . . . . . . . . . . 116
5.9 Valores dos erros MSE dos controladores BS_MP, BSMC_MP e SMC com mo-delo aerodinâmico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Lista de Acrónimos e abreviações
Letras Latinas
𝑎 ∈ R : Parametro escalar de sintonia.B ∈ R7×3: Matriz de entrada na equação dinâmica.𝑏3,𝑏4 : Parâmetros geométricos do dirigível.C3 ∈ R3×3 : Matriz representando o produto vetorial 𝑐×.c ∈ R3 : Centro de gravidade em coordenadas do sistema local.𝐸 ∈ R : Posição Leste relativa do dirigível.F𝑎 ∈ R6 : Vetor de forças aerodinâmicas.F𝑔 ∈ R6 : Vetor de forças gravitacionais.F𝑘 ∈ R6 : Vetor de forças cinéticas.F𝑝 ∈ R6 : Vetor de forças propulsoras.F𝑤 ∈ R6 : Vetor de forças induzidas do vento.f ∈ R6 : Vetor de forças de entrada dos atuadores.f𝑠 ∈ R6 : Vetor de forças de entrada saturadas.f1,f2,f3 : Vetor de componentes de forças de entrada saturadas.g ∈ R3 : Vetor de gravidade dado pelo sistema de coordenadas na Terra.ℎ ∈ R : Altitude do dirigível.I𝑛 ∈ R𝑛×𝑛 : Matriz identidade de tamanho 𝑛× 𝑛.K ∈ R6×6 : Matriz dinâmica associada à dinâmica.𝑘1,𝑘2,𝑘3,𝑘5 : Polinômios de segunda ordem depententes da velocidade do ar V𝑡.𝑙4,𝑙6 : Constantes geométricas do dirigível.M ∈ R6×6 : Matriz completa de inércia do dirigível.𝑚 ∈ R : Massa escalar do dirigível.𝑚𝑤 ∈ R : Massa pesante do dirigível, como diferença entre a massa escalar 𝑚 e a massaflutuante 𝑚𝐵.𝑁 ∈ R : Posição Norte do dirigível.𝑝 ∈ R3 : Posição do dirigível no sistema de coordenadas cartesiano terrestre.𝑝 ∈ R3 : Posição estimada de coordenadas cartesianas do dirigível.𝑝 ∈ R3 : Erro estimado da posição de coordenadas cartesianas do dirigível.p𝑟 ∈ R3 : Coordenadas cartesianas de posição referencial do dirigível no sistema de coordena-das terrestre.p𝑤 ∈ R3 : Velocidade linear do vento no sistema terrestre.ˆp𝑤 ∈ R3 : Velocidade estimada do vento no sistema terrestre.˜p𝑤 ∈ R3 : Erro estimado da velocidade linear do vento no sistema terrestre.Q ∈ R4×4 : Matriz relacionante de quatérnions com as derivadas e taxas de variação angulares.q ∈ R4 : Posição angular do dirigível definida na forma de quatérnions.
q𝑟 ∈ R4 : Referência para a posição angular do dirigível na forma de quatérnions.S ∈ R3×3 : Matriz de transformação do sistema de coordenadas terrestre para o sistema local.S𝑟 ∈ R3×3 : Matriz relacionante das velocidades de referência entre o sistema terrestre e olocal.T ∈ R7×6 : Matriz intermediária para desenvolvimento do equacionamento.T+ ∈ R6×7 : Pseudo-inversa da Matriz 𝑇 .T𝑎 ∈ R3 : Torque originado pelas forças aerodinâmicas.T𝑝 ∈ R3 : Torque originado pelas forças de propulsão.T𝑟 ∈ R7×6 : Matriz de transformação relacionante da velocidade de referência do sistema localcom com o terrestre.𝑇𝑋 ∈ R : Impulso total dos propulsores.𝑇𝐷 ∈ R : Impulso diferencial dos propulsores (diferença entre impulso esquerdo e direito).𝑡1,𝑡2,𝑡3 : Componentes do vetor de entrada do vetor de entrada.U = [𝑇𝑋 ,𝛿𝑣,𝑇𝐷,𝑇𝑌 ,𝛿𝑎,𝛿𝑒,𝛿𝑟]
𝑇 ∈ R7 : Vetor de entrada dos atuadores.𝑉𝑡 ∈ R : Velocidade do real em relação ao ar (TAS, do inglês True Air Speed).v ∈ R3 : Velocidade inercial linear do dirigível dada no sistema de coordenadas local.v𝑎 ∈ R3 : Vetor de velocidade do ar do dirigível dado no sistema de coordenadas local.v𝑟 ∈ R3 : Velocidade linear de referência em relação à terra do dirigível no sistema local.v𝑤 ∈ R3 : Velocidade linear do vento dada no sistema de coordenadas local.x =
[v𝑇𝑎 ,𝜔
𝑇]𝑇 ∈ R6 : Velocidade do ar do dirigível dado no sistema de coordenadas local.
x𝑟 =[v𝑇𝑟 ,0
]𝑇 ∈ R6 : Velocidade de referência do dirigível no sistema terrestre.
Letras Gregas
𝛿𝑎,𝛿𝑒,𝛿𝑟 ∈ R : Entradas das superfícies de deflexão da cauda: aileron, elevador e leme.𝛿𝑣 ∈ R : Ângulo de vetorização dos propulsores.Λ,Λ1,Λ2 ∈ R7×7 : Matriz diagonal definida positiva usada como parâmetro de sintonização.𝜂 =
[p𝑇 ,q𝑇
]𝑇 ∈ R7 : Vetor de posição do dirigível dado no sistema terrestre.𝜂𝑟 =
[p𝑇𝑟 ,q
𝑇𝑟
]𝑇 ∈ R7 : Vetor de posição referencial do dirigível no sistema terrestre.𝜎1,𝜎2 : Funções de saturação.Ω3 ∈ R3×3 : Matriz de representação do produto vetorial 𝜔×.Ω ∈ R4×4 : Matriz antissimétrica associada à velocidade angular 𝜔.𝜔 ∈ R3 : Vetor de velocidade angular do dirigível dado no sistema local.
Abreviações
FEM - Faculdade de Engenharia Mecânica.UNICAMP - Universidade Estadual de Campinas.VANTs – Veículos Aéreos Não Tripulados.
UAV - Do inglês Unmanned Aerial Vehicle.SISO - Sistemas de uma ntrada e saída (do inglês Single Input Single Output).MIMO - Sistemas com múltiplas entradas e saídas (do inglês Multiple Input Multiple Output).BS - Do inglês Backstepping.SMC - Controlador por modos deslizantes (do inglês Sliding Modes Control).FOSMC - Controlador SMC de primeira ordem (do inglês First Order Sliding Modes Control).BSMC - Do inglês Backstepping-Sliding Modes.
Sumário
1 INTRODUÇÃO 191.1 Contexto Histórico dos dirigíveis . . . . . . . . . . . . . . . . . . . . . . . . . 191.2 Princípios de Operação e Aplicações de Dirigíveis . . . . . . . . . . . . . . . . 22
1.2.1 Contextualização e Motivação do Projeto . . . . . . . . . . . . . . . . 251.2.2 Controle de Dirigíveis . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Controle Linear . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Controle Não Linear . . . . . . . . . . . . . . . . . . . . . . . . . 29
1.2.3 Objetivos e Contribuições do Trabalho . . . . . . . . . . . . . . . . . . 32
2 CONTROLADORES NÃO LINEARES 342.1 Backstepping (BS) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.1.1 Backstepping Integrador . . . . . . . . . . . . . . . . . . . . . . . . . 362.1.2 Aspectos da implementação . . . . . . . . . . . . . . . . . . . . . . . 422.1.3 Transformação de coordenadas do Backstepping . . . . . . . . . . . . 422.1.4 A verificação final . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432.1.5 Backstepping vetorial para sistemas de Múltiplas entradas e saídas -
MIMO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 442.2 Controle por Modos Deslizantes (SMC) . . . . . . . . . . . . . . . . . . . . . 46
2.2.1 Superfície de deslizamento . . . . . . . . . . . . . . . . . . . . . . . . 472.2.2 Lei de controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 502.2.3 SMC para sistemas de múltiplas entradas e saídas - MIMO . . . . . . . 562.2.4 Redução do chattering . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.3 Backstepping-Modos Deslizantes (BSMC) . . . . . . . . . . . . . . . . . . . . 60
3 MODELO DO DIRIGÍVEL 623.1 Atuadores do dirigível . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 633.2 Dinâmica do dirigível sem forças aerodinâmicas . . . . . . . . . . . . . . . . . 643.3 Dinâmica do dirigível . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 673.4 Modelo cinemático com quatérnions . . . . . . . . . . . . . . . . . . . . . . . 683.5 Erros de posição para voo pairado, rastreamento de trajetória e rastreamento de
velocidade. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 713.6 Alocação de controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 723.7 Estimação do vento e referências de atitude para controle de trajetória . . . . . 753.8 Modelo de turbulência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4 PROJETO DE CONTROLADORES NÃO LINEARES DO TIPO BACKSTEP-PING E MODOS DESLIZANTES 794.1 Projeto do controlador Backstepping_MP . . . . . . . . . . . . . . . . . . . . 79
4.2 Projeto do controlador Backstepping-Modos Deslizantes . . . . . . . . . . . . 834.3 Projeto do controlador por Modos Deslizantes . . . . . . . . . . . . . . . . . . 844.4 Comparações dos três controladores BS_MP, BSMC_MP e SMC . . . . . . . . 86
4.4.1 Variáveis Auxiliares . . . . . . . . . . . . . . . . . . . . . . . . . . . . 864.4.2 Funções de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . 864.4.3 Leis de formação do controle em termos do erro da aceleração . . . . 874.4.4 Leis de formação do controle em termos da derivada da variável trans-
formada z2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 874.4.5 Leis de Controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 884.4.6 Derivadas de Lyapunov - conferência final . . . . . . . . . . . . . . . . 884.4.7 Topologias dos Controladores . . . . . . . . . . . . . . . . . . . . . . 91
5 SIMULAÇÕES E RESULTADOS 945.1 Metodologia empregada no simulador: Diagramas de Blocos e Modelo dos Atu-
adores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 945.2 Comparação de resultados do Backstepping_MP e o controlador de Azinheira
(Azinheira et al., 2008) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 975.2.1 Determinação de ganhos do controlador Backstepping_MP . . . . . . . 975.2.2 Desempenho do controlador de Azinheira (Backstepping multivariável) 107
5.3 Comparação de resultados com os controles BS_MP, BSMC_MP e SMC comincidência de vento oscilatória . . . . . . . . . . . . . . . . . . . . . . . . . . 1105.3.1 Controlador Backstepping (BS_MP) submetido à vento com direção de
incidência oscilante . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1105.3.2 Controlador Backstepping-Modos Deslizantes (BSMC_MP) submetido
à vento com direção de incidência oscilante . . . . . . . . . . . . . . . 1135.3.3 Controlador Modos Deslizantes (SMC) submetido à vento com direção
de incidência oscilante. . . . . . . . . . . . . . . . . . . . . . . . . . . 1165.3.4 Resultados obtidos COM a inclusão do modelo aerodinâmico nas simu-
lações com os controladores BS_MP, BSMC_MP e SMC com vento dedireção de incidência oscilante. . . . . . . . . . . . . . . . . . . . . . . 118
5.4 Conclusões do Capítulo 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1225.4.1 Comparação de resultados do Backstepping_MP e o controlador de Azi-
nheira (Azinheira et al., 2008) . . . . . . . . . . . . . . . . . . . . . . 1225.4.2 Comparação de resultados com os controles BS_MP, BSMC_MP e
SMC com incidência de vento oscilatória . . . . . . . . . . . . . . . . 1245.4.3 Comparação de resultados obtidos com a inclusão do modelo aerodinâ-
mico nas simulações com os controles BS_MP, BSMC_MP e SMC comincidência de vento oscilatória . . . . . . . . . . . . . . . . . . . . . . 126
5.4.4 Comparações com outras abordagens da literatura . . . . . . . . . . . . 126
6 CONCLUSÃO GERAL 1296.1 Projeto Backstepping (BS_MP) . . . . . . . . . . . . . . . . . . . . . . . . . . 1296.2 Projeto Backstepping-Modos Deslizantes (BSMC_MP) . . . . . . . . . . . . . 1306.3 Trabalhos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
Referências Bibliográficas 132
ANEXOS 142
A – Referenciais. Os sistemas de coordenadas e suas transformações. 142
B – Estimador de vento. 144
19
1 INTRODUÇÃO
1.1 Contexto Histórico dos dirigíveis
O balão dirigível, ou simplesmente dirigível, foi a primeira aeronave motorizada cons-truída pelo homem, com capacidade de realizar voo estabilizado e direcionado. O francês Jean-Baptiste Meusnier, um general que participou da Revolução Francesa, foi quem propôs o pri-meiro projeto de um balão na forma de elipsoide, em 1784, com superfícies aerodinâmicasde cauda e três hélices (Ávila, 2016). Entretanto, a concepção do projeto de Meusnier, que sedeu logo depois do primeiro voo em balão de ar quente dos irmãos Montgolfier, fracassou, poisbaseava-se em um motor muito pesado e ineficiente. Na verdade, foi preciso esperar ainda quase70 anos, até que o engenheiro francês Henri Giffard, em 1852, finalmente realizasse o sonhode se controlar o voo de uma aeronave “mais leve que o ar”, utilizando uma tecnologia maiseficiente de motores a vapor, que ele mesmo desenvolveu (Ávila, 2016).
Após Giffard, várias tentativas foram realizadas para o desenvolvimento de dirigíveis commotores mais eficientes, incluindo motores elétricos, mas sem bons resultados. Mas foi SantosDumont quem realmente inaugurou uma nova fase na construção de dirigíveis, na virada doséculo XIX para o XX. Dumont passou a usar motores de combustão interna com bons resul-tados, em vários projetos de dirigíveis que culminaram com o Prêmio Deutsch de la Meurthe
quando conseguiu fazer com que o seu dirigível número 6 contornasse a Torre Eiffel em menosde 30 minutos (Ávila, 2016). A data desse feito, 19 de outubro de 1901, é considerada comoum marco na dirigibilidade de balões e dirigíveis, pois demonstrou que o aperfeiçoamento dosaeróstatos poderia levar efetivamente à fabricação de veículos de transporte em larga escala.
De fato, isso veio a se tornar realidade com o trabalho do alemão Ferdinand Zeppelin, noinício do século XX. Simultaneamente aos avanços de Santos Dumont na França, o Barão Zep-pelin desenvolveu diversos projetos pioneiros de dirigíveis, no final do século XIX e primeiradécada do século XX. Seus dirigíveis eram do tipo “rígido”, ao contrário dos de Santos Du-mont, pois possuíam uma estrutura de suporte metálica interna, ao invés de um único invólucrocheio de gás como é o caso do dirigível “não rígido”. Os Zeppelins, como eram chamados essesdirigíveis rígidos, se tornaram comercialmente utilizáveis a partir de 1910, com a criação daempresa Deutsche Luftschiffahrts (DELAG), a primeira companhia aérea do mundo. Para se teruma ideia do sucesso da empresa, no ano de 1914, a companhia já tinha transportado mais de10.000 passageiros em 1.500 voos (inclusive transatlânticos), que aliás eram muito confortáveis,com restaurantes e dormitórios de diversas classes.
A “era de ouro” dos dirigíveis, iniciada em 1910, terminou, contudo, no ano de 1937,com o advento dos novos projetos de aviões comerciais. Apesar do bom histórico de segurançados dirigíveis, com mais de 1 milhão de milhas voadas (incluindo a primeira circum-navegaçãoaérea do globo) sem que nenhum passageiro se ferisse, a tragédia com o dirigível Hindenburg,em 1937, contudo, interrompeu a sequência de sucessos do uso de dirigíveis no transporte aéreo
20
de passageiros.Nos anos seguintes, os dirigíveis de grande porte continuaram a ser usados para fins mi-
litares, principalmente na II Guerra Mundial, tanto pelos alemães como pelos países aliados.Já no período do pós-guerra, os desenvolvimentos de dirigíveis militares diminuíram em ritmo,sendo suportados principalmente pela marinha norte-americana. Mas com a chegada da crise dopetróleo em 1973, um novo interesse pelo uso dos dirigíveis ressurgiu, por conta da busca poraeronaves de menor consumo de combustível.
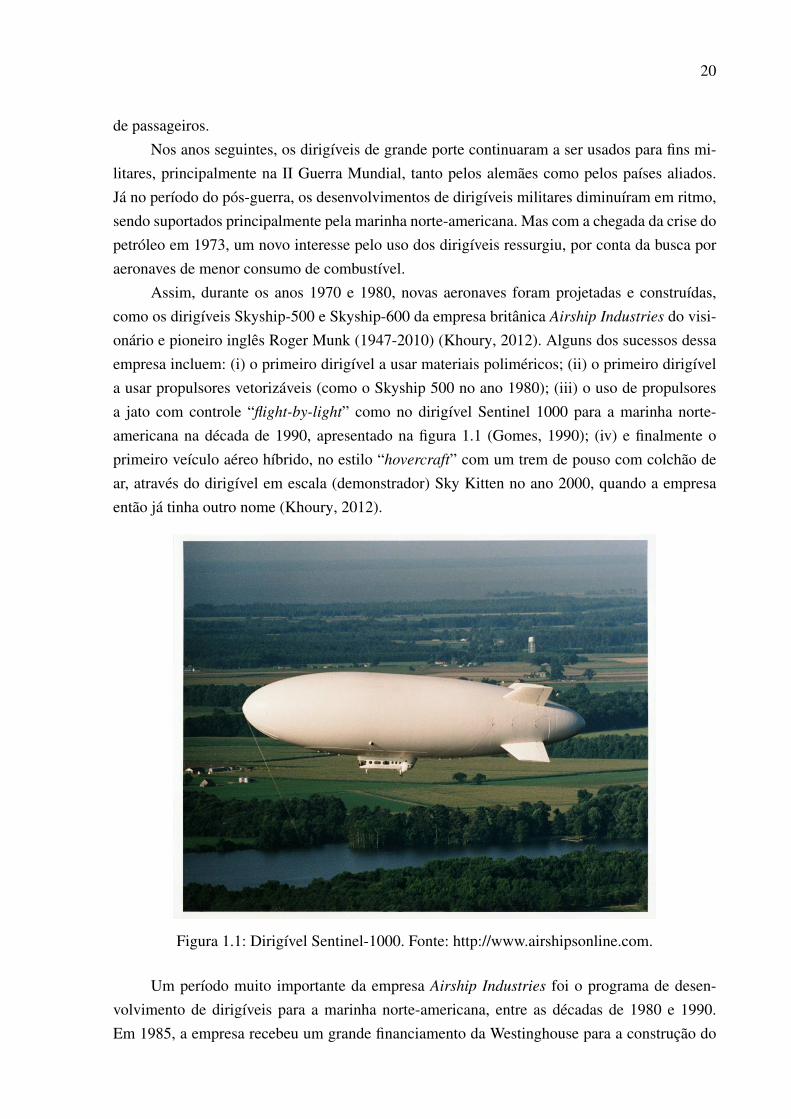
Assim, durante os anos 1970 e 1980, novas aeronaves foram projetadas e construídas,como os dirigíveis Skyship-500 e Skyship-600 da empresa britânica Airship Industries do visi-onário e pioneiro inglês Roger Munk (1947-2010) (Khoury, 2012). Alguns dos sucessos dessaempresa incluem: (i) o primeiro dirigível a usar materiais poliméricos; (ii) o primeiro dirigívela usar propulsores vetorizáveis (como o Skyship 500 no ano 1980); (iii) o uso de propulsoresa jato com controle “flight-by-light” como no dirigível Sentinel 1000 para a marinha norte-americana na década de 1990, apresentado na figura 1.1 (Gomes, 1990); (iv) e finalmente oprimeiro veículo aéreo híbrido, no estilo “hovercraft” com um trem de pouso com colchão dear, através do dirigível em escala (demonstrador) Sky Kitten no ano 2000, quando a empresaentão já tinha outro nome (Khoury, 2012).
Figura 1.1: Dirigível Sentinel-1000. Fonte: http://www.airshipsonline.com.
Um período muito importante da empresa Airship Industries foi o programa de desen-volvimento de dirigíveis para a marinha norte-americana, entre as décadas de 1980 e 1990.Em 1985, a empresa recebeu um grande financiamento da Westinghouse para a construção do
21
dirigível de vigilância Sentinel 5000 (militarmente conhecido por YEZ-2A). O dirigível, quedeveria ter 142 metros de comprimento e um volume de 70 mil m3 de Hélio, seria o maiordirigível não rígido construído desde a Segunda Guerra Mundial. Ele deveria voar em grandesaltitudes (5.000m), com um avançado sistema de radar (Airborne Early Warning), além de ou-tros equipamentos militares, podendo permanecer no ar até 3 dias sem reabastecimento ou até30 dias com reabastecimento.
Durante o programa, ocorreu a falência da empresa Airship Industries, que foi então ab-sorvida pela empresa americana, dando origem à Westinghouse Airship Industries (WAI). Comoparte dos desenvolvimentos do projeto do Sentinel 5000 (YEZ-2A), o demonstrador em meiaescala chamado Sentinel 1000, de 70 m de comprimento, foi construído, realizando um vooinaugural em Junho de 1991, na Carolina do Norte, USA. O dirigível Sentinel 5000, entretanto,jamais foi finalizado, pois em agosto de 1995 ocorreu um incêndio no hangar onde se encon-trava, aparentemente acidental, e que destruiu completamente o dirigível Sentinel 1000, bemcomo o protótipo da gôndola do Sentinel 5000, sendo que o programa de dirigíveis da marinhaamericana foi encerrado pouco tempo depois.
Dentre os vários marcos importantes do programa Sentinel da Airship Industries paraa marinha americana, um deles merece especial destaque, pois está ligado a esse trabalho dedoutorado. Para o projeto do futuro dirigível militar YEZ-2A, um modelo aerodinâmico, comensaios em túnel de vento, incluindo o levantamento de coeficientes aerodinâmicos, foi entãorealizado no Cranfield Institute of Technology, no Reino Unido. O trabalho, que foi o primeirodesenvolvimento/validação de um modelo aerodinâmico de um dirigível da literatura científica,foi realizado pelo brasileiro e engenheiro do ITA Sergio Bittencourt Varella Gomes, em seu tra-balho de doutorado realizado nesse instituto (Gomes, 1990), sendo validado posteriormente emvoos experimentais com o dirigível em escala Sentinel 1000, nos Estados Unidos. Esse mesmomodelo aerodinâmico de dirigíveis é utilizado, com algumas adaptações e extensões (Azinheiraet al., 2001), nessa tese de doutorado, sendo a base da plataforma de simulação utilizada pelogrupo de pesquisa luso-brasileiro (UNICAMP-CTI-ITA-UFAM-IST de Lisboa) desde o iníciodos projetos de dirigíveis iniciados pelo CTI-Renato Archer há 20 anos (Gomes e Ramos, 1998).Atualmente, pesquisas sobre o comportamento estático e dinâmico para aeróstatos vem sendodesenvolvidas para balões cativos como a realizada por Azevedo (2017).
Destaca-se também que os desenvolvimentos pioneiros do inglês Roger Munk em suaempresa Airship Industries durante as décadas de 80 e 90 impulsionaram e viabilizaram , nosanos 2000 e 2010, diversos outros projetos de dirigíveis de grande porte em duas linhas prin-cipais: (i) os dirigíveis estratosféricos, que são plataformas que operam por longos períodos detempo em grandes altitudes; (ii) os dirigíveis híbridos para transporte de grandes cargas - umaevolução do demonstrador Sky Kitten da Airship Industries – que é um misto de dirigível, aviãoe helicóptero (Khoury, 2012) (Bestaoui e Hima, 2001).
22
1.2 Princípios de Operação e Aplicações de Dirigíveis
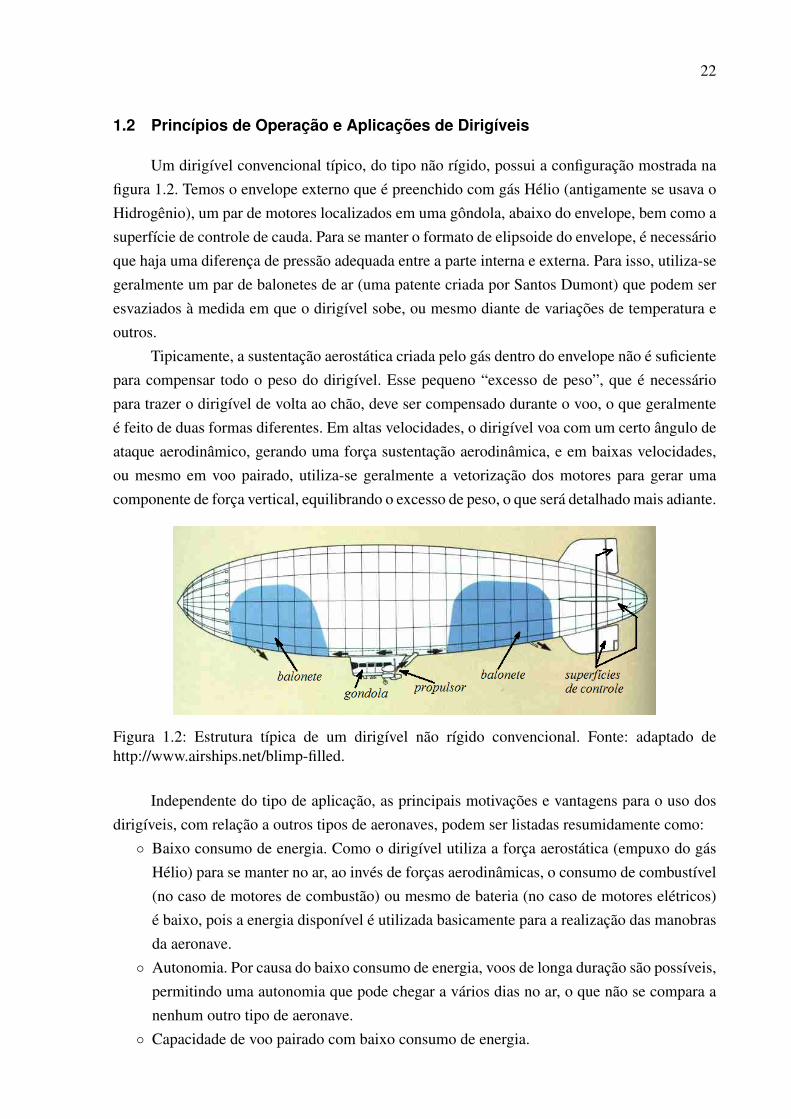
Um dirigível convencional típico, do tipo não rígido, possui a configuração mostrada nafigura 1.2. Temos o envelope externo que é preenchido com gás Hélio (antigamente se usava oHidrogênio), um par de motores localizados em uma gôndola, abaixo do envelope, bem como asuperfície de controle de cauda. Para se manter o formato de elipsoide do envelope, é necessárioque haja uma diferença de pressão adequada entre a parte interna e externa. Para isso, utiliza-segeralmente um par de balonetes de ar (uma patente criada por Santos Dumont) que podem seresvaziados à medida em que o dirigível sobe, ou mesmo diante de variações de temperatura eoutros.
Tipicamente, a sustentação aerostática criada pelo gás dentro do envelope não é suficientepara compensar todo o peso do dirigível. Esse pequeno “excesso de peso”, que é necessáriopara trazer o dirigível de volta ao chão, deve ser compensado durante o voo, o que geralmenteé feito de duas formas diferentes. Em altas velocidades, o dirigível voa com um certo ângulo deataque aerodinâmico, gerando uma força sustentação aerodinâmica, e em baixas velocidades,ou mesmo em voo pairado, utiliza-se geralmente a vetorização dos motores para gerar umacomponente de força vertical, equilibrando o excesso de peso, o que será detalhado mais adiante.
Figura 1.2: Estrutura típica de um dirigível não rígido convencional. Fonte: adaptado dehttp://www.airships.net/blimp-filled.
Independente do tipo de aplicação, as principais motivações e vantagens para o uso dosdirigíveis, com relação a outros tipos de aeronaves, podem ser listadas resumidamente como:
∘ Baixo consumo de energia. Como o dirigível utiliza a força aerostática (empuxo do gásHélio) para se manter no ar, ao invés de forças aerodinâmicas, o consumo de combustível(no caso de motores de combustão) ou mesmo de bateria (no caso de motores elétricos)é baixo, pois a energia disponível é utilizada basicamente para a realização das manobrasda aeronave.
∘ Autonomia. Por causa do baixo consumo de energia, voos de longa duração são possíveis,permitindo uma autonomia que pode chegar a vários dias no ar, o que não se compara anenhum outro tipo de aeronave.
∘ Capacidade de voo pairado com baixo consumo de energia.
23
∘ Decolagem e aterrisagem vertical (Vertical Take Off and Landing -VTOL) – permitindoo seu uso em áreas de difícil acesso, sem pista ou sem estrutura aeroportuária.
∘ Baixa vibração, devido à necessidade de motores menores.∘ No caso do uso de motores elétricos, a vibração produzida é ainda menor, e eventualmente
há a possibilidade do uso de painéis para o aproveitamento de energia solar.Todas essas vantagens, comparativamente a outros tipos de aeronaves, podem ser aprovei-
tadas em diferentes tipos de aplicações. De uma forma geral, podemos dizer que, atualmente, ouso dos dirigíveis pode ser classificado em três grandes linhas, as quais estão diretamente rela-cionadas, em última instância, ao tamanho da aeronave e à sua altitude de operação (Bestaoui,2012):
1) Dirigíveis estratosféricos. São dirigíveis projetados para missões de longa duração ope-rando a grandes altitudes (entre 10 e 20 km). A vantagem dos dirigíveis nesse caso, em relaçãoa aviões e helicópteros, é o custo de operação bem mais baixo para se manter uma estação deobservação aérea de longa autonomia e baixo consumo de combustível.
2) Dirigíveis para transporte (de carga ou de passageiros). A era dos dirigíveis comerciaispara transporte de passageiros foi iniciada com o lançamento dos grandes Zeppelins, a partirde 1910. Com o advento dos aviões comerciais e, posteriormente, os grandes helicópteros, ouso dos dirigíveis para grandes cargas declinou, retornando o seu interesse, através de projetospontuais, a partir da década de 1970. Para o transporte de cargas pesadas, considerando que oempuxo de 1 m3 de gás Hélio consegue levantar aproximadamente 1 kg de carga paga (pay-load), faz-se necessário o uso de dirigíveis de dimensões enormes cuja construção/operaçãosegura ainda apresenta grandes desafios tecnológicos. No final dos anos 1990, e início dos anos2000, diversos projetos, ainda na linha de dirigíveis convencionais foram propostos, e quasetodos mal sucedidos. Uma dessas tentativas foi o projeto europeu Cargolifter, cujo dirigíveldeveria ter 240 metros de comprimento com capacidade de carga de 50 toneladas. Após a cons-trução de um protótipo em escala 1:4, o projeto foi encerrado em 2002, por conta de problemasfinanceiros. Nos anos 2000 e 2010, uma nova configuração de dirigíveis, totalmente inovadora,chamados de híbridos, tem sido proposta e testada. O dirigível híbrido pretende solucionar osdois problemas clássicos dos dirigíveis convencionais para transporte de carga que são a insta-bilidade em manobras de terra e o procedimento de carga e descarga no chão. Atualmente, osdois representantes dessa classe de dirigíveis, que estão em fase de testes e homologações, sãoo Airlander-10 da companhia britânica Hybrid Air Vehicles-HAV (uma empresa originária daantiga Airship Industries de Roger Munk) e o dirigível LMH-1 da gigante americana Lockheed
Martin, a maior empresa de defesa do mundo.3) Dirigíveis como plataformas de observação. A ideia do uso dos dirigíveis como pla-
taformas de observação apareceu na década de 1960, quando as aplicações de voo pairado porlongos períodos de tempo se tornaram mais importantes do que a busca por maior velocidadee manobrabilidade da aeronave. Uma enorme gama de aplicações surgiu então para os dirigí-veis como anúncios e propagandas, monitoramento, aquisição de dados, vigilância, segurança,
24
inspeção, prospecção geológica, e outros. Para esse tipo de aplicação, o dirigível é solicitado avoar em baixas altitudes, realizar voos pairados para observação sobre eventuais alvos, e fre-quentemente apresentar capacidade de realizar decolagem e aterrissagem verticais.
Dentro dessa linha de “dirigíveis para observação”, pode-se citar duas subcategorias, quesão os dirigíveis tripulados e os não tripulados. Os dirigíveis não tripulados se enquadram dentrodo domínio de pesquisa da robótica aérea, cujo objeto de trabalho são os chamados VANTs –veículos aéreos não tripulados, em inglês UAV ou unmanned aerial vehicle. Desde o iníciodos anos 2000, a área de pesquisa e tecnologia relacionada ao desenvolvimento e operação dosVANTs tem propiciado um campo de investigação crescente e relevante, possibilitando umavasta gama de aplicações, tanto militares como civis, dentro da chamada “robótica de serviço”.
De maneira geral, os VANTs podem ser classificados quanto à sua forma de sustentação(asas fixas, asas rotativas ou aerostática), quanto ao tipo de missão de voo que são capazes de de-sempenhar, ou ainda quanto ao nível de autonomia operacional (tele-operados, semiautônomosou autônomos).
A operação autônoma de um veículo robótico aéreo, como um dirigível autônomo, exigeo domínio das mais diversas tecnologias, incluindo o desenvolvimento de um conjunto sensorialadequado, sistema embarcado, sistema de comunicação, sistema de acionamento dos atuadores,sistema de controle (piloto automático), software do “sistema de gerenciamento de voo” (Flight
Management System), dentre outros. Esse último tema, que inclui as estratégias de controle,guiamento e navegação da aeronave, representa um vasto campo de trabalho para a investigaçãocientífica, por conta dos desafios ligados ao problema de se estabilizar e controlar automatica-mente a movimentação da aeronave robótica nas mais diversas condições de voo e de operação(Bestaoui, 2012), (Bueno et al., 2002).
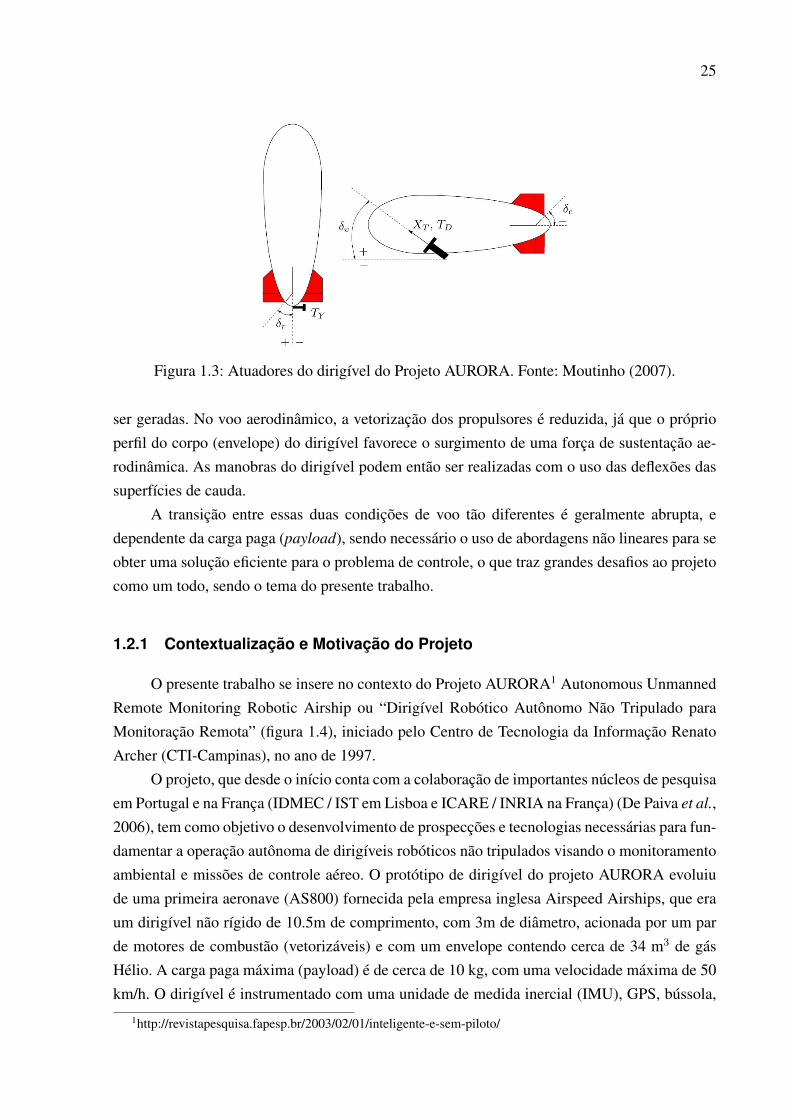
Para ilustrar o nível de complexidade do controle autônomo no caso específico dos di-rigíveis, podemos citar o exemplo dos dois perfis típicos de voo de operação dessas aerona-ves, envolvendo o equilíbrio entre a força peso e a força de empuxo do gás Hélio. Para isso,considere-se o dirigível da figura 1.3 (do projeto AURORA), que possui como atuadores decontrole as superfícies de cauda e dois motores, um de cada lado da gondola, vetorizáveis, comângulo de vetorização entre -30 e +120 graus.
Os dois perfis de voo completamente diferentes, dependentes da velocidade do dirigívelrelativa ao ar (airspeed), podem ser descritos como:
• Voo pairado ou “hovering” (< airspeed). Nessa fase de voo, a velocidade do dirigívelem relação ao ar é pequena, de tal forma que as principais forças atuantes na aeronave são asforças propulsivas dos motores. Nessa condição de voo, as superfícies de cauda apresentam umaautoridade ou eficiência reduzida. Isso faz com que o dirigível seja controlado primariamentepela força gerada pelos propulsores vetorizáveis, cujo ângulo de vetorização permite a geraçãode forças verticais e longitudinais, bem como os respectivos momentos.
• Voo de cruzeiro ou aerodinâmico (> airspeed). Nesse caso, há a presença de uma signi-ficativa velocidade da aeronave em relação ao ar, de forma que as forças aerodinâmicas podem
25
Figura 1.3: Atuadores do dirigível do Projeto AURORA. Fonte: Moutinho (2007).
ser geradas. No voo aerodinâmico, a vetorização dos propulsores é reduzida, já que o próprioperfil do corpo (envelope) do dirigível favorece o surgimento de uma força de sustentação ae-rodinâmica. As manobras do dirigível podem então ser realizadas com o uso das deflexões dassuperfícies de cauda.
A transição entre essas duas condições de voo tão diferentes é geralmente abrupta, edependente da carga paga (payload), sendo necessário o uso de abordagens não lineares para seobter uma solução eficiente para o problema de controle, o que traz grandes desafios ao projetocomo um todo, sendo o tema do presente trabalho.
1.2.1 Contextualização e Motivação do Projeto
O presente trabalho se insere no contexto do Projeto AURORA1 Autonomous UnmannedRemote Monitoring Robotic Airship ou “Dirigível Robótico Autônomo Não Tripulado paraMonitoração Remota” (figura 1.4), iniciado pelo Centro de Tecnologia da Informação RenatoArcher (CTI-Campinas), no ano de 1997.
O projeto, que desde o início conta com a colaboração de importantes núcleos de pesquisaem Portugal e na França (IDMEC / IST em Lisboa e ICARE / INRIA na França) (De Paiva et al.,2006), tem como objetivo o desenvolvimento de prospecções e tecnologias necessárias para fun-damentar a operação autônoma de dirigíveis robóticos não tripulados visando o monitoramentoambiental e missões de controle aéreo. O protótipo de dirigível do projeto AURORA evoluiude uma primeira aeronave (AS800) fornecida pela empresa inglesa Airspeed Airships, que eraum dirigível não rígido de 10.5m de comprimento, com 3m de diâmetro, acionada por um parde motores de combustão (vetorizáveis) e com um envelope contendo cerca de 34 m3 de gásHélio. A carga paga máxima (payload) é de cerca de 10 kg, com uma velocidade máxima de 50km/h. O dirigível é instrumentado com uma unidade de medida inercial (IMU), GPS, bússola,
1http://revistapesquisa.fapesp.br/2003/02/01/inteligente-e-sem-piloto/
26
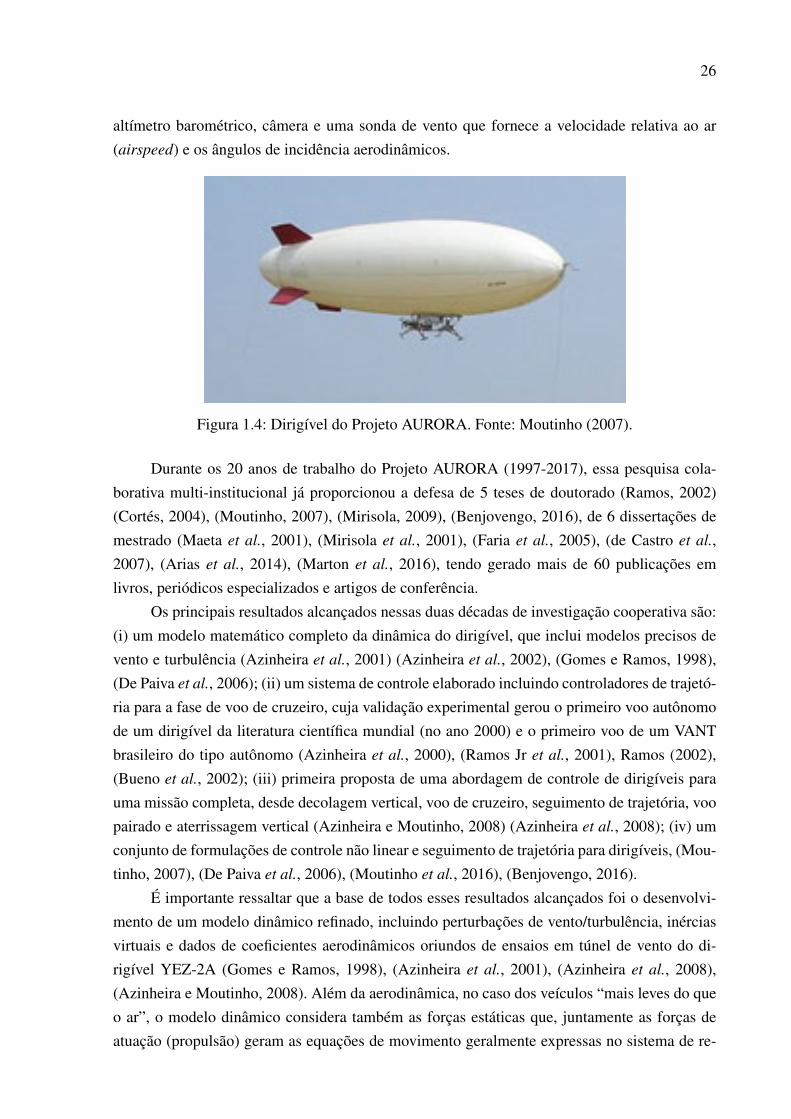
altímetro barométrico, câmera e uma sonda de vento que fornece a velocidade relativa ao ar(airspeed) e os ângulos de incidência aerodinâmicos.
Figura 1.4: Dirigível do Projeto AURORA. Fonte: Moutinho (2007).
Durante os 20 anos de trabalho do Projeto AURORA (1997-2017), essa pesquisa cola-borativa multi-institucional já proporcionou a defesa de 5 teses de doutorado (Ramos, 2002)(Cortés, 2004), (Moutinho, 2007), (Mirisola, 2009), (Benjovengo, 2016), de 6 dissertações demestrado (Maeta et al., 2001), (Mirisola et al., 2001), (Faria et al., 2005), (de Castro et al.,2007), (Arias et al., 2014), (Marton et al., 2016), tendo gerado mais de 60 publicações emlivros, periódicos especializados e artigos de conferência.
Os principais resultados alcançados nessas duas décadas de investigação cooperativa são:(i) um modelo matemático completo da dinâmica do dirigível, que inclui modelos precisos devento e turbulência (Azinheira et al., 2001) (Azinheira et al., 2002), (Gomes e Ramos, 1998),(De Paiva et al., 2006); (ii) um sistema de controle elaborado incluindo controladores de trajetó-ria para a fase de voo de cruzeiro, cuja validação experimental gerou o primeiro voo autônomode um dirigível da literatura científica mundial (no ano 2000) e o primeiro voo de um VANTbrasileiro do tipo autônomo (Azinheira et al., 2000), (Ramos Jr et al., 2001), Ramos (2002),(Bueno et al., 2002); (iii) primeira proposta de uma abordagem de controle de dirigíveis parauma missão completa, desde decolagem vertical, voo de cruzeiro, seguimento de trajetória, voopairado e aterrissagem vertical (Azinheira e Moutinho, 2008) (Azinheira et al., 2008); (iv) umconjunto de formulações de controle não linear e seguimento de trajetória para dirigíveis, (Mou-tinho, 2007), (De Paiva et al., 2006), (Moutinho et al., 2016), (Benjovengo, 2016).
É importante ressaltar que a base de todos esses resultados alcançados foi o desenvolvi-mento de um modelo dinâmico refinado, incluindo perturbações de vento/turbulência, inérciasvirtuais e dados de coeficientes aerodinâmicos oriundos de ensaios em túnel de vento do di-rigível YEZ-2A (Gomes e Ramos, 1998), (Azinheira et al., 2001), (Azinheira et al., 2008),(Azinheira e Moutinho, 2008). Além da aerodinâmica, no caso dos veículos “mais leves do queo ar”, o modelo dinâmico considera também as forças estáticas que, juntamente as forças deatuação (propulsão) geram as equações de movimento geralmente expressas no sistema de re-
27
ferencial local (do corpo) Gomes e Ramos (1998). Esse modelo matemático serve de base paraa plataforma de desenvolvimento aqui utilizada, que é o simulador do dirigível AURORA (Ra-mos et al., 1999) desenvolvido em Simulink/Matlab e que apresenta alto grau de complexidadee fidelidade.
Recentemente, no ano de 2014, o projeto AURORA evoluiu para uma nova concepção deum dirigível que utiliza uma configuração de 4 motores elétricos vetorizáveis, com dois paresa frente e dois pares a trás da gôndola (Arias et al., 2014). Essa estrutura de propulsão permiteaumentar o grau de manobrabilidade do dirigível, especialmente em baixas velocidades, e é ofoco do Projeto DRONI - “Dirigível Robótico de Concepção Inovadora”, financiado pelo CNPqe conduzido pelo CTI-Renato Archer em parceria com a FEM-Unicamp, ITA, UFAM e outrasinstituições.
E nessa mesma linha, a equipe de pesquisadores e técnicos do projeto DRONI integrou,no ano de 2016, o projeto Temático Fapesp-CNPq “INSAC-INCT em Sistemas AutônomosColaborativos”, mais especificamente dentro do grupo de trabalho “Plataformas mais leves queo ar para sistemas de sensoriamento, comunicação e informação aplicados à região amazônica”,conduzido pelo CTI-Renato Archer, e também com a participação da FEM-Unicamp, ITA eUFAM.
A propósito, as abordagens de controle não linear desenvolvidas nos últimos 10 anos pelosparceiros portugueses Prof. José Azinheira e Profa. Alexandra Moutinho, em cooperação como Prof. Ely Paiva (Unicamp) e o Prof. José Reginaldo Hughes Carvalho (UFAM), e testadaspreviamente em ambiente de simulação, deverão integrar o sistema de piloto automático dodirigível do projeto DRONI durante os voos experimentais na Amazônia, planejados para o anode 2018.
1.2.2 Controle de Dirigíveis
Além do problema da transição de voo abrupta e não linear entre os dois regimes de ope-ração do dirigível (pairado e aerodinâmico), já mencionado anteriormente, o projeto de controlede voo de dirigíveis envolve vários outros desafios, que tornam o tema interessante e rico parao campo da pesquisa científica e tecnológica, dentre os quais citamos:
(i) A subatuação do dirigível é um aspecto importante a ser considerado, especialmenteno movimento lateral, já que não há atuadores disponíveis para se produzir uma força lateralefetiva na aeronave. Note-se que a nova configuração de dirigíveis com 4 motores do ProjetoDRONI pretende mitigar esse problema.
(ii) A eficiência das superfícies de cauda depende da velocidade relativa ao ar (airspeed)e tende a zero para o caso de ausência de vento relativo.
(iii) A saturação e a dinâmica dos atuadores impõem respostas de controle limitadas quedevem ser levadas em consideração no projeto.
(iv) Diferentemente de um avião, o dirigível, que é uma aeronave de grande volume e
28
pequena velocidade de translação, exige que se leve em conta todas as forças atuantes.(v) Diferentemente também do caso do avião, um dirigível apresenta uma baixa veloci-
dade de operação, de tal forma que as variações de vento representam perturbações muito fortes,podendo chegar a representar mais de 40% do airspeed total.
(vi) As fortes perturbações de vento levam também a desafios para o projeto do guiamentoe planejamento de voo para uma missão completa.
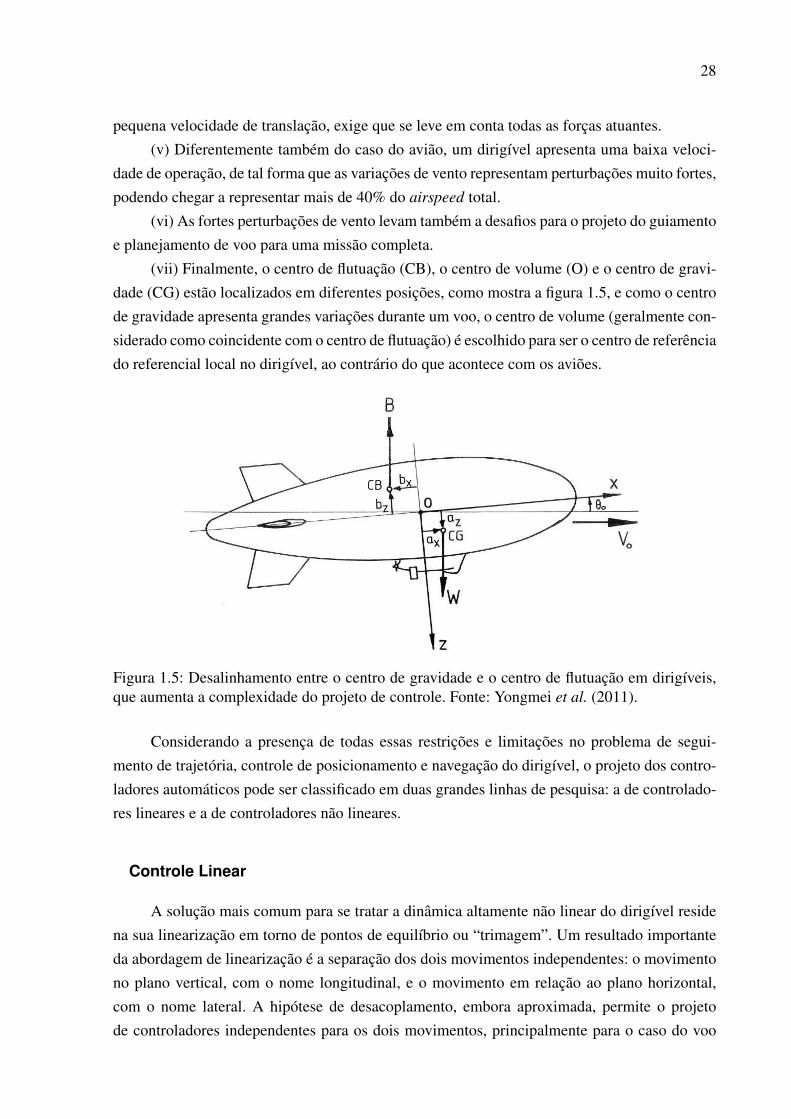
(vii) Finalmente, o centro de flutuação (CB), o centro de volume (O) e o centro de gravi-dade (CG) estão localizados em diferentes posições, como mostra a figura 1.5, e como o centrode gravidade apresenta grandes variações durante um voo, o centro de volume (geralmente con-siderado como coincidente com o centro de flutuação) é escolhido para ser o centro de referênciado referencial local no dirigível, ao contrário do que acontece com os aviões.
Figura 1.5: Desalinhamento entre o centro de gravidade e o centro de flutuação em dirigíveis,que aumenta a complexidade do projeto de controle. Fonte: Yongmei et al. (2011).
Considerando a presença de todas essas restrições e limitações no problema de segui-mento de trajetória, controle de posicionamento e navegação do dirigível, o projeto dos contro-ladores automáticos pode ser classificado em duas grandes linhas de pesquisa: a de controlado-res lineares e a de controladores não lineares.
Controle Linear
A solução mais comum para se tratar a dinâmica altamente não linear do dirigível residena sua linearização em torno de pontos de equilíbrio ou “trimagem”. Um resultado importanteda abordagem de linearização é a separação dos dois movimentos independentes: o movimentono plano vertical, com o nome longitudinal, e o movimento em relação ao plano horizontal,com o nome lateral. A hipótese de desacoplamento, embora aproximada, permite o projetode controladores independentes para os dois movimentos, principalmente para o caso do voo
29
aerodinâmico, ou de cruzeiro.No caso do controle linear de dirigíveis, encontramos várias referências na literatura.
Uma abordagem para controle de atitude e velocidade do dirigível alemão Lotte é apresentadaem Wimmer e Well (2001). Resultados experimentais e de simulação são mostrados para doiscontroladores dotados de uma entrada e uma saída (SISO do inglês Single Input Single Out-
put) independentes, um para o controle de atitude usando a superfície de cauda e outro para ocontrole de velocidade usando a propulsão dos motores.
No caso do dirigível do Projeto AURORA, que usa superfície de cauda e dois motores ve-torizáveis, vários tipos de controladores lineares já foram projetados. Em De Paiva et al. (1999)são apresentados três controladores do tipo PID SISO para velocidade, altitude e orientação (he-
ading) para o modo lateral. Em De Paiva et al. (2001) os parâmetros de controladores PID sãootimizados por minimização de normas H2 e H-infinito. Para realizar o seguimento de trajetória,uma malha externa de controle de heading é adicionada em Azinheira et al. (2001) para umaversão ligeiramente modificada de controle de atitude e de velocidade. Nessa referência, bemcomo em Carvalho et al. (2001), os autores também investigaram a inclusão de um controladorPD para amortecer os rolamentos que ocorrem durante as curvas.
Em Azinheira et al. (2000) e Elfes et al. (2003) os autores investigaram o seguimentode trajetória autônomo do dirigível AURORA usando algoritmos PID e H-infinito para o modolateral. A arquitetura de controle PID consiste de uma malha interna controlando o heading euma malha externa de controle de trajetória, enquanto que o controlador H-infinito controla atrajetória em uma única malha. Posteriormente, além do controle lateral citado, foi inserido ocontrole longitudinal, também com uma estrutura PID. Esse esquema (lateral / longitudinal)foi gradualmente validado em testes de voo reais, em campo aberto, e os resultados foramapresentados em Azinheira et al. (2000), Ramos Jr et al. (2001), Ramos (2002), Bueno et al.
(2002), Elfes et al. (2003). A abordagem LQR também foi utilizada nos dirigíveis do ProjetoAURORA (no Brasil) e Projeto DIVA (em Portugal), numa estratégia de escalonamento deganhos (gain schedulling) para o controle em todo a faixa de velocidades de operação (Moutinhoet al., 2016).
Controle Não Linear
O uso da dinâmica do modelo linearizado para o projeto de controladores lineares possui,entretanto, diversas limitações. O procedimento de linearização restringe a validade do contro-lador projetado para regiões próximas dos pontos de equilíbrio estáveis (relativos à trimagem),ou então implica no compartilhamento de um conjunto de controladores para diferentes pontosde equilíbrio (como no escalonamento de ganhos). Além disso, por razões de segurança, bemcomo simplicidade e flexibilidade, um controle não linear global é mais interessante do que umcontrole linear e desacoplado.
Assim, considerando-se o alto grau de não linearidade nas equações de movimento de um
30
dirigível, os métodos de controle não linear apresentam-se como abordagens mais promissoraspara a estabilização e rastreamento desse tipo de aeronave. Diversos enfoques de controle nãolinear vêm sendo tratados no âmbito dos projetos AURORA e DRONI, todos em ambiente desimulação até o momento. De qualquer maneira, ainda não existe na literatura mundial umresultado experimental de controle de dirigíveis contemplando simultaneamente todas as fasesde voo, com suas diferentes dinâmicas: desde a decolagem/aterrissagem verticais e passandopelo voo pairado, até o voo de cruzeiro (ou aerodinâmico).
Um dos métodos de controle não linear mais conhecidos é a Inversão Dinâmica (Dyna-
mic Inversion), também chamada de Linearização por Realimentação (Feedback Linearization).Essa técnica é usada em Wang e Shan (2006) e (Lee et al. (2005) para o controle de atitude,e em Yongmei et al. (2011) para realizar o seguimento de trajetória de um dirigível que voa agrandes altitudes.
Nos Projetos AURORA e DIVA, a Inversão Dinâmica é usada em Moutinho e Azinheira(2005) e De Paiva et al. (2006) para o seguimento de trajetória. O desempenho do controla-dor é verificado em simulação incluindo a perturbação do vento. Uma recente evolução destatécnica, denominada Dinâmica Inversa Não linear Incremental (ou Incremental Nonlinear Dy-
namic Inversion), começou a ser abordada pelo grupo Azinheira et al. (2015) inicialmente nocontexto de aeronaves de asas rotativas (helicópteros e, principalmente, quadrirotores) mas compotencial promissor para os dirigíveis.
Outro importante método de controle não linear é a técnica de Backsteppping. Nos Pro-jetos AURORA e DIVA (Azinheira et al., 2006), (De Paiva et al., 2006) um projeto preliminarde um controlador Backsteppping foi desenvolvido para a fase de voo pairado (hovering). Essaabordagem foi estendida posteriormente em Azinheira e Moutinho (2008) e Azinheira et al.
(2008) para incluir as saturações dos atuadores. O primeiro artigo foca no voo pairado enquantoque o segundo adiciona a tarefa de seguimento de trajetória e apresenta os resultados de simula-ção para uma missão completa, compreendendo decolagem e aterrissagem vertical, seguimentode trajetória e voo pairado, incluindo perturbações de vento e turbulência. Esse foi o primeiroartigo científico da literatura, que se tem notícia, para o controle de uma missão completa deum dirigível com o uso de um único controlador. Como o controlador projetado exige o conhe-cimento da velocidade do dirigível relativa ao ar (airspeed), o algoritmo de um estimador devento, com prova de convergência, é incluído na abordagem.
A técnica de Backstepping também é utilizada para o controle de trajetória de um dirigívelem Beji et al. (2002) e Beji e Abichou (2005), mas em condições simplificadas e sem perturba-ções de vento. Em uma outra abordagem de Backstepping levemente diferente, Bennaceur et al.
(2008) utilizam-se seis controladores SISO desacoplados para estabilização de um dirigível.O projeto de dirigível autônomo francês do LAAS/CNRS propõe uma estratégia de con-
trole global por Backstepping incluindo voo pairado e voo aerodinâmico (Hygounenc e Soueres,2002), (Hygounenc et al., 2004b). A abordagem consiste no uso de diferentes controladores paraas fases de decolagem, voo lateral, voo longitudinal e aterrissagem, sendo que a transição entre
31
os controladores é realizada dependendo da fase de voo e dos erros de trajetória.Em Liesk (2012), algoritmos de controle lineares e não lineares são aplicados na estabili-
zação do dirigível MkII ALTAV. O controle linear utiliza a abordagem H-infinito, e o não linearé baseado em Backstepping e Lyapunov. Além disso, um controlador de alto nível foi projetadopara realizar o seguimento de trajetória autonomamente, bem como o voo pairado sobre umlocal fixo, usando a mesma lei de controle.
Outra abordagem não linear muito importante é o Controle por Modos Deslizantes (SMC- Sliding Modes Control), que também é baseado em prova de convergência por Lyapunov. EmXia e Corbett (2004), o SMC é usado, em simulação, para realizar o tracking de trajetória comdois controladores separados, sendo um para o modo lateral e outro para o modo longitudinal.Em Jian-guo e Jun (2010), um SMC adaptativo é proposto para o controle lateral de um dirigível.No projeto AURORA, uma abordagem de SMC também foi proposta para o controle do modolateral do dirigível Benjovengo et al. (2009), e mais recentemente duas novas abordagens deSMC foram propostas para o modo longitudinal Benjovengo (2016), De Paiva et al. (2017) eVieira et al. (2017).
Simultaneamente ao período em que foi desenvolvida a presente tese de doutorado, umaoutra abordagem que também combina Backstepping com modos deslizantes foi desenvolvidana China para o controle do voo pairado de um dirigível de 25 m de comprimento, sendo pro-posta em Yang et al. (2016). Podemos, contudo, citar diversas limitações e deficiências dessaproposta com relação ao projeto desenvolvido nesse trabalho. O trabalho de Yang et al. (2016)limita o movimento do dirigível ao plano (2D), supondo que ele voa a altitude constante, e nãoconsidera a estimação do vento no projeto de controle, que é uma perturbação importante. Aausência do vento estimado na lei de controle também limita o problema ao controle de posi-cionamento (voo pairado), pois para o rastreamento de trajetória é necessário um bom conhe-cimento do modelo aerodinâmico. Isso se explica porque nas velocidades mais altas as forçasaerodinâmicas não podem ser desprezadas, como acontece nas baixas velocidades ou no voopairado. Aliás, a proposta de Yang et al. (2016) não menciona, em nenhum momento, detalhessobre o modelo aerodinâmico utilizado, sendo este tratado como uma incerteza que faz parte dosinal de controle.
Finalmente, dentre todos esses trabalhos da literatura científica apenas dois projetos apre-sentam resultados globais para o controle de uma missão completa de um dirigível, incluindodecolagem/aterrissagem, controle de trajetória e estabilização (voo pairado). O primeiro delesé o do projeto LAAS-CNRS, que trabalha com um conjunto de controladores desacoplados,e o segundo é o trabalho de Azinheira et al. (2008) e Moutinho (2007), no âmbito do projetoAURORA, que utiliza um controlador único e sem desacoplamento. Além disso, são raras asinvestigações de controle de dirigíveis que levam em conta o aspecto da robustez contra as per-turbações de vento e turbulência, extremamente importante devido às baixas velocidades dessetipo de aeronave.
32
1.2.3 Objetivos e Contribuições do Trabalho
A ideia deste trabalho surgiu da necessidade de desenvolvimento de controladores não li-neares para a tarefa de missão completa do dirigível AURORA do CTI Renato Archer, incluindodecolagem vertical, voo aerodinâmico com vento e turbulência, seguimento de trajetória, voopairado e descida vertical.
Nesse sentido, desde 2005, diferentes abordagens de controle não linear têm sido desen-volvidas e testadas em simulação, na busca de uma técnica que seja eficiente e robusta paraimplementação futura em voos reais. Assim, nos anos de 2006 e 2009 foram desenvolvidasimportantes abordagens de controle por Backstepping testadas e validadas no simulador do di-rigível AURORA (Azinheira et al., 2002).
E no ano de 2007, foi iniciada, pelo então pesquisador do CTI-Renato Archer, Ely Paiva,uma linha de pesquisa com a abordagem de controle por Modos Deslizantes, e que ainda possuitrabalhos em desenvolvimento na FEM-Unicamp.A escolha de sistemas de controle chaveados(modos deslizantes) para o controle de sistemas não lineares se justifica pela relativa facilidadede implementação prática, além de serem considerados controladores robustos com relação aperturbações externas (do tipo casadas) e imprecisões na modelagem do sistema controlado.
Trabalhos como os de Filippov (1964) tornaram possível o desenvolvimento de méto-dos de controle por modos deslizantes como os apresentados em Vadim (1977) e Itkis (1976),primeiramente publicados na antiga União Soviética. Mais recentemente, a partir do final da dé-cada de 1960 e principalmente na década de 1970, estes trabalhos foram publicados no ocidentee ganharam importância no cenário de sistemas de controle não lineares.
Dessa forma, a motivação dessa pesquisa de doutorado veio da necessidade de se reali-zar uma análise comparativa detalhada entre o desempenho das abordagens de Backstepping ede Modos Deslizantes, bem como desenvolver uma nova técnica combinando as vantagens decada uma, no chamado controle por Backstepping-Modos Deslizantes (BSMC), que pretendeagregar as características de robustez da técnica de Modos Deslizantes com a capacidade de usoadaptativo do Backstepping.
Assim, a proposta do presente trabalho é abordar como base os dois métodos de con-trole não lineares, como o controlador recursivo baseado na lei de controle por realimentaçãodenominado backstepping e o controlador que utiliza termos chaveados chamado de modosdeslizantes, bem como a combinação de ambos (Backstepping-modos deslizantes) aplicados aoproblema do controle de posicionamento e tracking do dirigível AS800 do Projeto AURORA.
Portanto, os principais objetivos desse trabalho são:1. Desenvolver uma nova técnica de controle por Backstepping (BS) para o problema de
controle de dirigíveis.2. Desenvolver uma nova técnica de controle por Backstepping-Modos Deslizantes (BSMC)
para o problema de controle de dirigíveis.3. Realizar uma análise comparativa entre as leis de controle dos 3 controladores (BS, SMC,
33
BSMC) com relação ao desempenho e robustez.Destaca-se que para poder realizar a comparação analítica detalhada desses controladores, foinecessário primeiramente desenvolver uma estrutura padrão comum às 3 abordagens (BS, SMCe BSMC), ou seja, leis de controle que possuíssem termos semelhantes e que facilitasse umacomparação analítica posterior.
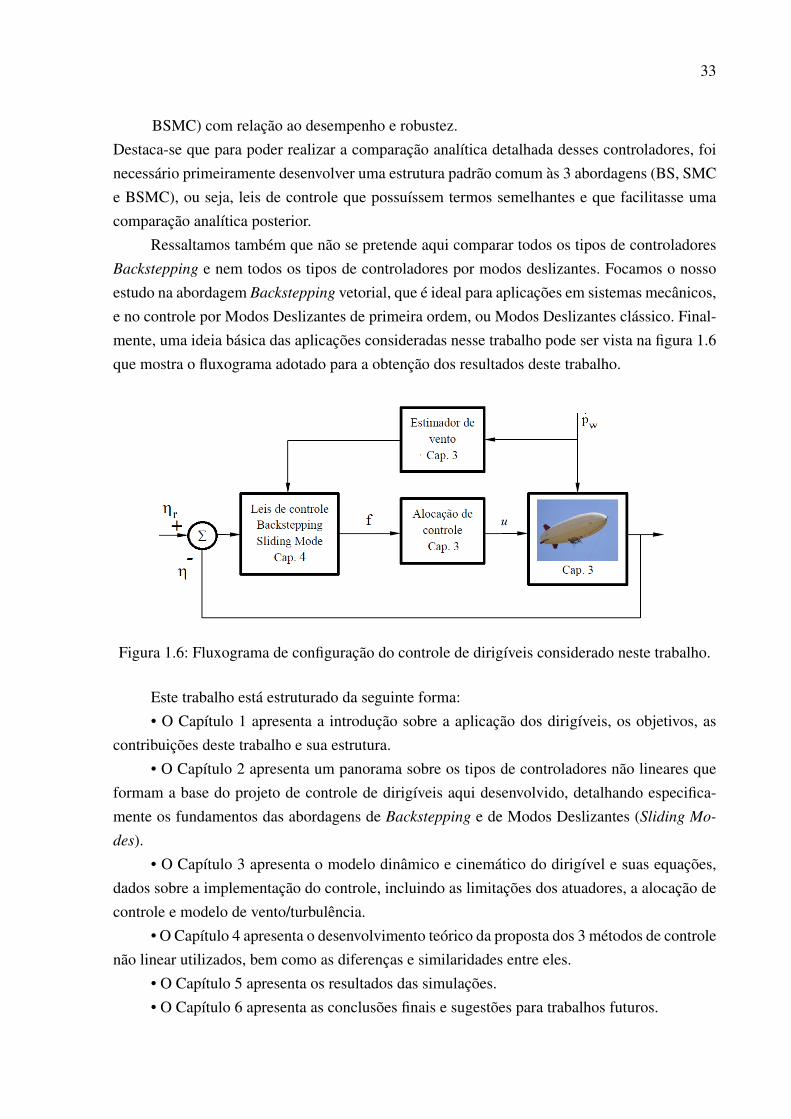
Ressaltamos também que não se pretende aqui comparar todos os tipos de controladoresBackstepping e nem todos os tipos de controladores por modos deslizantes. Focamos o nossoestudo na abordagem Backstepping vetorial, que é ideal para aplicações em sistemas mecânicos,e no controle por Modos Deslizantes de primeira ordem, ou Modos Deslizantes clássico. Final-mente, uma ideia básica das aplicações consideradas nesse trabalho pode ser vista na figura 1.6que mostra o fluxograma adotado para a obtenção dos resultados deste trabalho.
Figura 1.6: Fluxograma de configuração do controle de dirigíveis considerado neste trabalho.
Este trabalho está estruturado da seguinte forma:• O Capítulo 1 apresenta a introdução sobre a aplicação dos dirigíveis, os objetivos, as
contribuições deste trabalho e sua estrutura.• O Capítulo 2 apresenta um panorama sobre os tipos de controladores não lineares que
formam a base do projeto de controle de dirigíveis aqui desenvolvido, detalhando especifica-mente os fundamentos das abordagens de Backstepping e de Modos Deslizantes (Sliding Mo-
des).• O Capítulo 3 apresenta o modelo dinâmico e cinemático do dirigível e suas equações,
dados sobre a implementação do controle, incluindo as limitações dos atuadores, a alocação decontrole e modelo de vento/turbulência.
• O Capítulo 4 apresenta o desenvolvimento teórico da proposta dos 3 métodos de controlenão linear utilizados, bem como as diferenças e similaridades entre eles.
• O Capítulo 5 apresenta os resultados das simulações.• O Capítulo 6 apresenta as conclusões finais e sugestões para trabalhos futuros.
34
2 CONTROLADORES NÃO LINEARES
Este capítulo apresenta os fundamentos das duas técnicas de controle não linear que ser-vem de base para todos os projetos envolvidos nessa pesquisa que são as técnicas de Backs-
tepping (BS) e de Modos Deslizantes (SMC). Ambas as técnicas são apresentadas, preliminar-mente, nas suas versões mais simples, para o controle de sistemas com uma entrada e uma saída(SISO), e em seguida para as versões mais complexas para sistemas multivariáveis com váriasentradas e saídas (MIMO do inglês Multiple Input Multiple Output). Destaca-se também quetratamos aqui de um tipo particular de Modos Deslizantes, que é o Modos Deslizantes de pri-meira ordem, e de um tipo particular de Backstepping que é o Backstepping vetorial, muito útile adequado para o controle de sistemas mecânicos envolvendo as variáveis de posição e veloci-dade. Finalmente, a última parte do capítulo apresenta a estratégia que combina as duas aborda-gens, no chamado controle "Backstepping-Modos Deslizantes"(BSMC) que combina vantagensdessas duas técnicas fundamentais.
2.1 Backstepping (BS)
A origem do Backstepping não é muito clara devido à grande quantidade de artigos simi-lares que apareceram quase que simultaneamente em diferentes trabalhos do final da década de1980 (Härkegård e Glad, 2000). Embora não haja consenso, alguns atribuem o seu desenvolvi-mento ao trabalho da equipe do Professor Petar V. Kokotovic da Universidade da Califórnia. Oprêmio Bode da Sociedade de Sistemas de Controle do IEEE recebido por Kokotovic em 1991foi relacionado ao tema emergente, e em 1992, Kanellakopoulos et al. (1992) apresentaram um“toolkit” para o projeto de leis de controle para sistemas não lineares usando Backstepping.Durante os anos seguintes, os livros de Krstic et al. (1995), Freeman e Kototovic (1996) e Se-pulchre et al. (1997) foram publicados sobre o assunto. O avanço da técnica de Backstepping,assim como de outras ferramentas de controle não linear durante a década de 1990 foram temade um trabalho de revisão bibliográfica (survey) por Kokotovic e Arcak (1999) apresentado nocongresso mundial de controle IFAC em Beijing, China. Curiosamente, nesse mesmo ano, umexcelente tutorial sobre Backstepping foi publicado por Fossen e Strand (1999). Outro pontoa se destacar é a relação entre a técnica de Backstepping e o controle baseado em passividadeapresentada no trabalho pioneiro de Lozano et al. (1992).
É interessante notar que muitas vezes a técnica de Backstepping é utilizada dentro deum contexto de controle adaptativo (Zhou e Wen, 2008). O controle adaptativo é uma área depesquisa que evoluiu muito nas últimas 5 décadas com desenvolvimentos teóricos e práticos im-portantes, incluindo as provas de estabilidade global e a melhoria de sistemas de rastreamento edesempenho transiente. Basicamente, um controlador adaptativo é projetado combinando-se ouso de um estimador de parâmetros, que fornece uma estimativa dos parâmetros desconhecidosda planta que são utilizados para ajustar os ganhos do controlador “online” ou seja, durante o
35
modo de operação. Ao contrário do controle adaptativo, onde os ganhos do controlador são ajus-tados o tempo todo a partir de informações de um estimador paramétrico, o controlador robustopossui ganhos fixos, e deve apresentar um desempenho satisfatório para uma dada faixa de va-riação dos parâmetros da planta, que é o caso do controle por Modos Deslizantes, consideradouma técnica de controle robusto. A técnica de Backstepping pode ser utilizada tanto para for-necer um controlador com ganhos fixos como com ganhos variáveis (Backstepping adaptativo).Quando a incerteza paramétrica da planta é muito grande, o uso de um estimador de parâmetrosque atualiza os ganhos do controle Backstepping é geralmente útil. Outra alternativa, no caso deincerteza paramétrica é o uso combinado de Backstepping com Modos Deslizantes, onde esseúltimo é utilizado para conferir maior robustez ao controlador.
Uma variação importante do projeto por Backstepping é o chamado “Backstepping veto-rial”, desenvolvido por Fossen em 1997 e que possui um grande potencial de aplicação no con-trole de sistemas mecânicos, especialmente os manipuladores robóticos e veículos autônomosterrestres, aéreos e aquáticos. Nesse caso, o sistema original não precisa estar necessariamentena forma “strict feedback” do Backstepping integrador, bastando que a função MIMO associ-ada esteja na forma bloco triangular inferior. O Backstepping vetorial permite também explorarpropriedades estruturais de sistemas MIMO mecânicos e robóticos, como dissipação (matrizesde amortecimento), simetria da matriz de inércia e propriedades antissimétricas da matriz deforças centrífugas e de Coriolis. O princípio do projeto por Backstepping vetorial será melhordiscutido no capítulo posterior desse trabalho, chamado “Projeto de controladores não lineares”.
A aplicação do controle Backstepping pode ser encontrada nas mais diferentes áreas daengenharia, como controle de motores elétricos como mostrados em Alrifai et al. (1998), Carrollet al. (1995) e Carroll et al. (1993), motores a diesel apresentados por Fredriksson (1999) e ajato, Krstic et al. (1998). Em Grovlen e Fossen (1996) e em Strand et al. (1998), a técnica deBackstepping é usada para o controle de posicionamento de navios. A robótica é uma outragrande área de aplicação de Backstepping, principalmente na robótica móvel. Com relação aocontrole de veículos aéreos, por exemplo, as aplicações de Backstepping são bem diversificadas,incluindo helicópteros, quadricópteros, aviões e dirigíveis, encontrados em Steinberg e Page(1999), Stevens e Lewis (1992), Strand et al. (1998) e Vidyasagar (2002).
No caso dos dirigíveis, a primeira aplicação de Backstepping foi proposta pelo laboratóriofrancês LAAS/CNRS para o projeto de um dirigível autônomo, visto em Hygounenc e Soue-res (2002) e Hygounenc et al. (2004a). A estratégia de controle abordada nesse trabalho propõechavear a lei de controle entre quatro “subcontroladores”, um para cada fase de voo considerada.Cada controlador é contudo ainda baseado nos modelos linearizados do dirigível, o que leva àclássica separação dos modos de controle longitudinal e lateral. Uma segunda solução para oproblema de tracking de trajetórias para dirigíveis é proposta por Fukao et al. (2003) baseadaem técnicas de Backstepping para veículos subatuados, mas que não considera robustez contraperturbações de vento. O livro de Bestaoui (2012) sobre controle de dirigíveis apresenta umaaplicação de Backstepping para o dirigível do Projeto AURORA fazendo referência ao trabalho
36
De Paiva et al. (2006). Esse trabalho original introduziu uma descrição compacta das equa-ções do modelo não linear do dirigível, resultando em uma formulação original da dinâmicae cinemática com uma mudança adequada de variáveis que facilita a aplicação da técnica deBackstepping para o projeto do controle de posicionamento do dirigível. Um segundo trabalhodo mesmo grupo, feito quatro anos mais tarde, apresentou um controlador Backstepping aindamais avançado. Baseado na mesma formulação compacta do modelo, o controle Backstepping
único de Azinheira e Moutinho (2008) é aplicado para todas as fases de voo da missão do di-rigível. Além disso, as forças aerodinâmicas, desprezadas no projeto anterior, foram incluídasno modelo, permitindo tratar tanto o problema da estabilização (posicionamento) como o pro-blema do seguimento de trajetória (tracking), numa única abordagem e com uma única lei decontrole. Dessa vez, o controle Backstepping é derivado para um modelo dinâmico do dirigívelexpresso como função da velocidade relativa ao ar (airspeed), e não da velocidade relativa aosolo (groundspeed), como no trabalho anterior. O projeto inclui um estimador de vento, e a leide controle é derivada, assegurando-se estabilidade assintótica mesmo na presença de saturaçãodas entradas de controle (atuadores). Curiosamente, a abordagem utilizada de Backstepping emambos os trabalhos de Azinheira não é nem um “Backstepping integrador”, onde a planta apa-rece na forma “strict feedback”, nem um “Backstepping vetorial”. A abordagem se assemelhaàquela do Backstepping vetorial, mas com uma forma livre de escolha das variáveis auxiliares.Uma observação interessante, como veremos mais adiante, é que o projeto de Backstepping de-senvolvido nesta tese permite chegar a um controlador com um grau de liberdade a mais nosganhos ajustáveis do que no caso do projeto Backstepping de Azinheira. Apesar de ser consi-derada a primeira técnica de controle não linear a gerar uma lei de controle única para todasas fases de voo de um dirigível, a abordagem de Backstepping de Azinheira et al. (2008) apre-senta uma deficiência com relação à robustez do controlador e as incertezas no modelo, mesmoconsiderando-se a grande utilidade da inclusão do observador de vento incorporado no controle.A propósito, uma abordagem semelhante Yang et al. (2014) utiliza o Backstepping vetorial parao controle de posicionamento de um navio, onde as variações devido a correntes oceânicas,vento e ondas são consideradas como uma perturbação estimada por um observador e utilizadaem uma lei de controle Backstepping robusta.
2.1.1 Backstepping Integrador
O teorema de Lyapunov e suas variantes têm sido usados há décadas como importanteferramenta tanto para o projeto de controle linear como não linear. Entretanto, o seu uso emcontrole não linear sempre foi difícil por conta da dificuldade de se encontrar uma função deLyapunov adequada para o sistema. Se o projetista consegue encontrar uma tal função apropri-ada, então uma lei de controle que estabiliza o sistema é determinada, mas a tarefa de encontraressa função ideal é geralmente vista como algo que depende de uma boa dose de imaginação eexperiência do projetista.
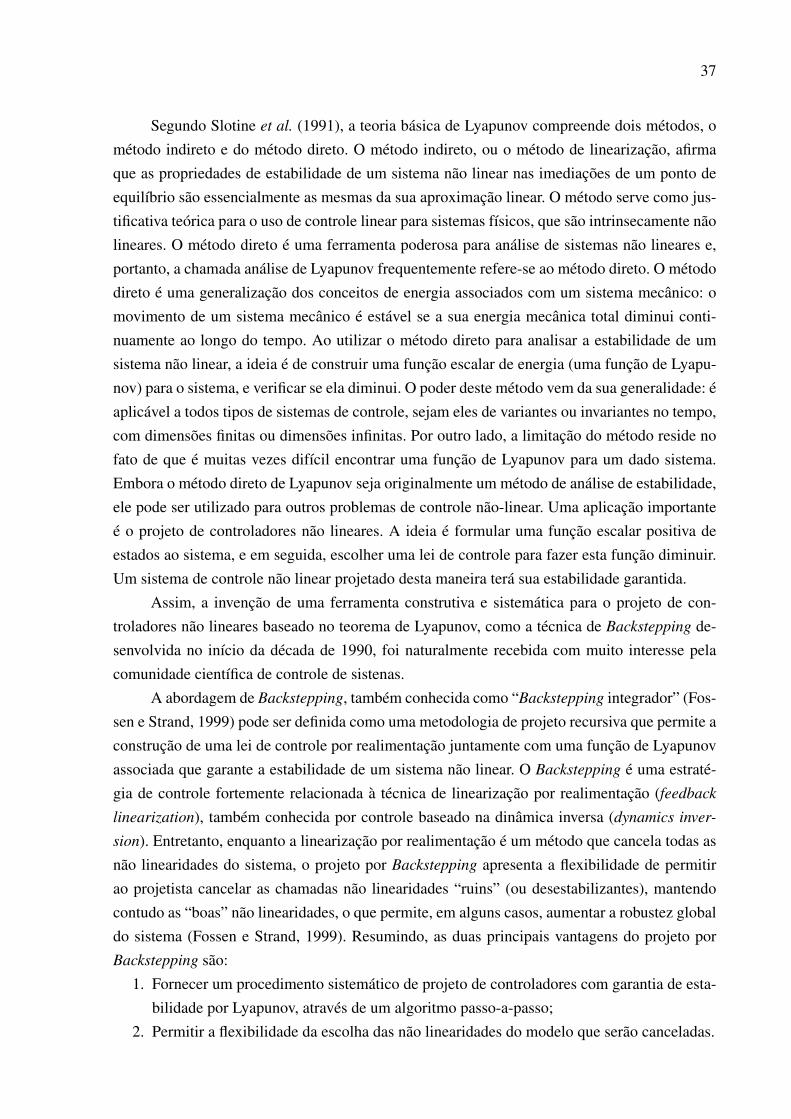
37
Segundo Slotine et al. (1991), a teoria básica de Lyapunov compreende dois métodos, ométodo indireto e do método direto. O método indireto, ou o método de linearização, afirmaque as propriedades de estabilidade de um sistema não linear nas imediações de um ponto deequilíbrio são essencialmente as mesmas da sua aproximação linear. O método serve como jus-tificativa teórica para o uso de controle linear para sistemas físicos, que são intrinsecamente nãolineares. O método direto é uma ferramenta poderosa para análise de sistemas não lineares e,portanto, a chamada análise de Lyapunov frequentemente refere-se ao método direto. O métododireto é uma generalização dos conceitos de energia associados com um sistema mecânico: omovimento de um sistema mecânico é estável se a sua energia mecânica total diminui conti-nuamente ao longo do tempo. Ao utilizar o método direto para analisar a estabilidade de umsistema não linear, a ideia é de construir uma função escalar de energia (uma função de Lyapu-nov) para o sistema, e verificar se ela diminui. O poder deste método vem da sua generalidade: éaplicável a todos tipos de sistemas de controle, sejam eles de variantes ou invariantes no tempo,com dimensões finitas ou dimensões infinitas. Por outro lado, a limitação do método reside nofato de que é muitas vezes difícil encontrar uma função de Lyapunov para um dado sistema.Embora o método direto de Lyapunov seja originalmente um método de análise de estabilidade,ele pode ser utilizado para outros problemas de controle não-linear. Uma aplicação importanteé o projeto de controladores não lineares. A ideia é formular uma função escalar positiva deestados ao sistema, e em seguida, escolher uma lei de controle para fazer esta função diminuir.Um sistema de controle não linear projetado desta maneira terá sua estabilidade garantida.
Assim, a invenção de uma ferramenta construtiva e sistemática para o projeto de con-troladores não lineares baseado no teorema de Lyapunov, como a técnica de Backstepping de-senvolvida no início da década de 1990, foi naturalmente recebida com muito interesse pelacomunidade científica de controle de sistenas.
A abordagem de Backstepping, também conhecida como “Backstepping integrador” (Fos-sen e Strand, 1999) pode ser definida como uma metodologia de projeto recursiva que permite aconstrução de uma lei de controle por realimentação juntamente com uma função de Lyapunovassociada que garante a estabilidade de um sistema não linear. O Backstepping é uma estraté-gia de controle fortemente relacionada à técnica de linearização por realimentação (feedback
linearization), também conhecida por controle baseado na dinâmica inversa (dynamics inver-
sion). Entretanto, enquanto a linearização por realimentação é um método que cancela todas asnão linearidades do sistema, o projeto por Backstepping apresenta a flexibilidade de permitirao projetista cancelar as chamadas não linearidades “ruins” (ou desestabilizantes), mantendocontudo as “boas” não linearidades, o que permite, em alguns casos, aumentar a robustez globaldo sistema (Fossen e Strand, 1999). Resumindo, as duas principais vantagens do projeto porBackstepping são:
1. Fornecer um procedimento sistemático de projeto de controladores com garantia de esta-bilidade por Lyapunov, através de um algoritmo passo-a-passo;
2. Permitir a flexibilidade da escolha das não linearidades do modelo que serão canceladas.
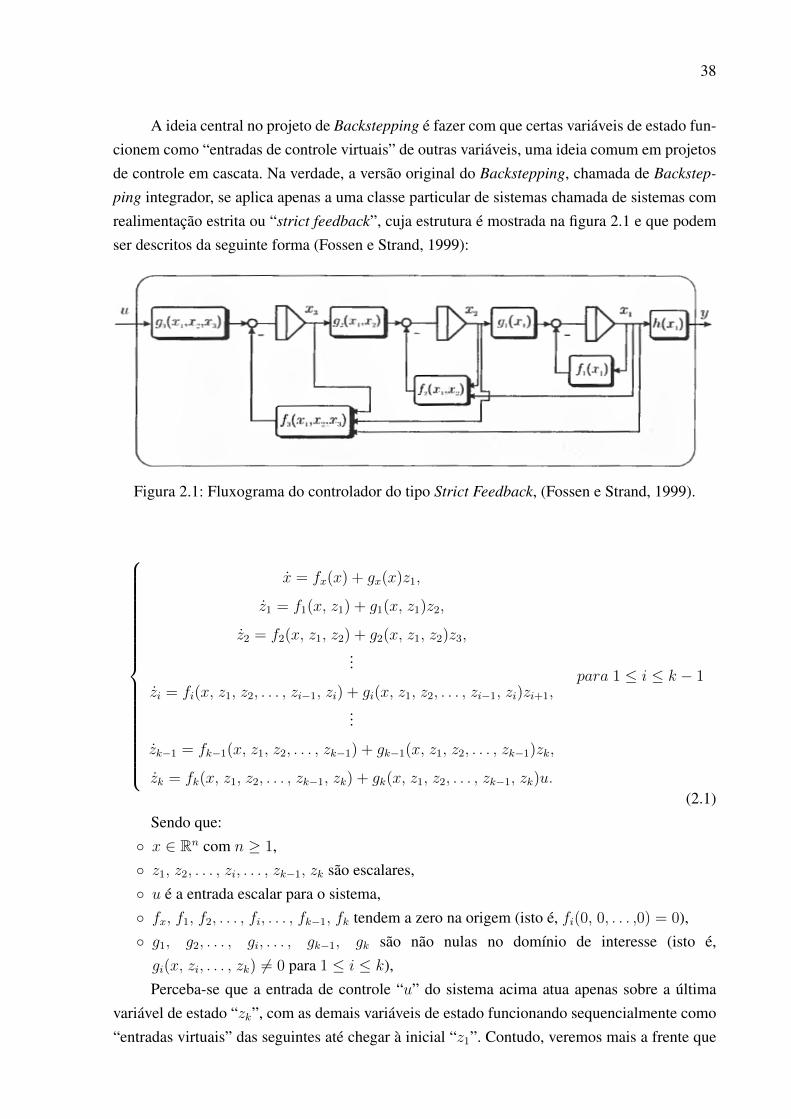
38
A ideia central no projeto de Backstepping é fazer com que certas variáveis de estado fun-cionem como “entradas de controle virtuais” de outras variáveis, uma ideia comum em projetosde controle em cascata. Na verdade, a versão original do Backstepping, chamada de Backstep-
ping integrador, se aplica apenas a uma classe particular de sistemas chamada de sistemas comrealimentação estrita ou “strict feedback”, cuja estrutura é mostrada na figura 2.1 e que podemser descritos da seguinte forma (Fossen e Strand, 1999):
Figura 2.1: Fluxograma do controlador do tipo Strict Feedback, (Fossen e Strand, 1999).
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
= 𝑓𝑥(𝑥) + 𝑔𝑥(𝑥)𝑧1,
1 = 𝑓1(𝑥, 𝑧1) + 𝑔1(𝑥, 𝑧1)𝑧2,
2 = 𝑓2(𝑥, 𝑧1, 𝑧2) + 𝑔2(𝑥, 𝑧1, 𝑧2)𝑧3,...
𝑖 = 𝑓𝑖(𝑥, 𝑧1, 𝑧2, . . . , 𝑧𝑖−1, 𝑧𝑖) + 𝑔𝑖(𝑥, 𝑧1, 𝑧2, . . . , 𝑧𝑖−1, 𝑧𝑖)𝑧𝑖+1,...
𝑘−1 = 𝑓𝑘−1(𝑥, 𝑧1, 𝑧2, . . . , 𝑧𝑘−1) + 𝑔𝑘−1(𝑥, 𝑧1, 𝑧2, . . . , 𝑧𝑘−1)𝑧𝑘,
𝑘 = 𝑓𝑘(𝑥, 𝑧1, 𝑧2, . . . , 𝑧𝑘−1, 𝑧𝑘) + 𝑔𝑘(𝑥, 𝑧1, 𝑧2, . . . , 𝑧𝑘−1, 𝑧𝑘)𝑢.
𝑝𝑎𝑟𝑎 1 ≤ 𝑖 ≤ 𝑘 − 1
(2.1)Sendo que:
∘ 𝑥 ∈ R𝑛 com 𝑛 ≥ 1,∘ 𝑧1, 𝑧2, . . . , 𝑧𝑖, . . . , 𝑧𝑘−1, 𝑧𝑘 são escalares,∘ 𝑢 é a entrada escalar para o sistema,∘ 𝑓𝑥, 𝑓1, 𝑓2, . . . , 𝑓𝑖, . . . , 𝑓𝑘−1, 𝑓𝑘 tendem a zero na origem (isto é, 𝑓𝑖(0, 0, . . . ,0) = 0),∘ 𝑔1, 𝑔2, . . . , 𝑔𝑖, . . . , 𝑔𝑘−1, 𝑔𝑘 são não nulas no domínio de interesse (isto é,𝑔𝑖(𝑥, 𝑧𝑖, . . . , 𝑧𝑘) = 0 para 1 ≤ 𝑖 ≤ 𝑘),Perceba-se que a entrada de controle “𝑢” do sistema acima atua apenas sobre a última
variável de estado “𝑧𝑘”, com as demais variáveis de estado funcionando sequencialmente como“entradas virtuais” das seguintes até chegar à inicial “𝑧1”. Contudo, veremos mais a frente que
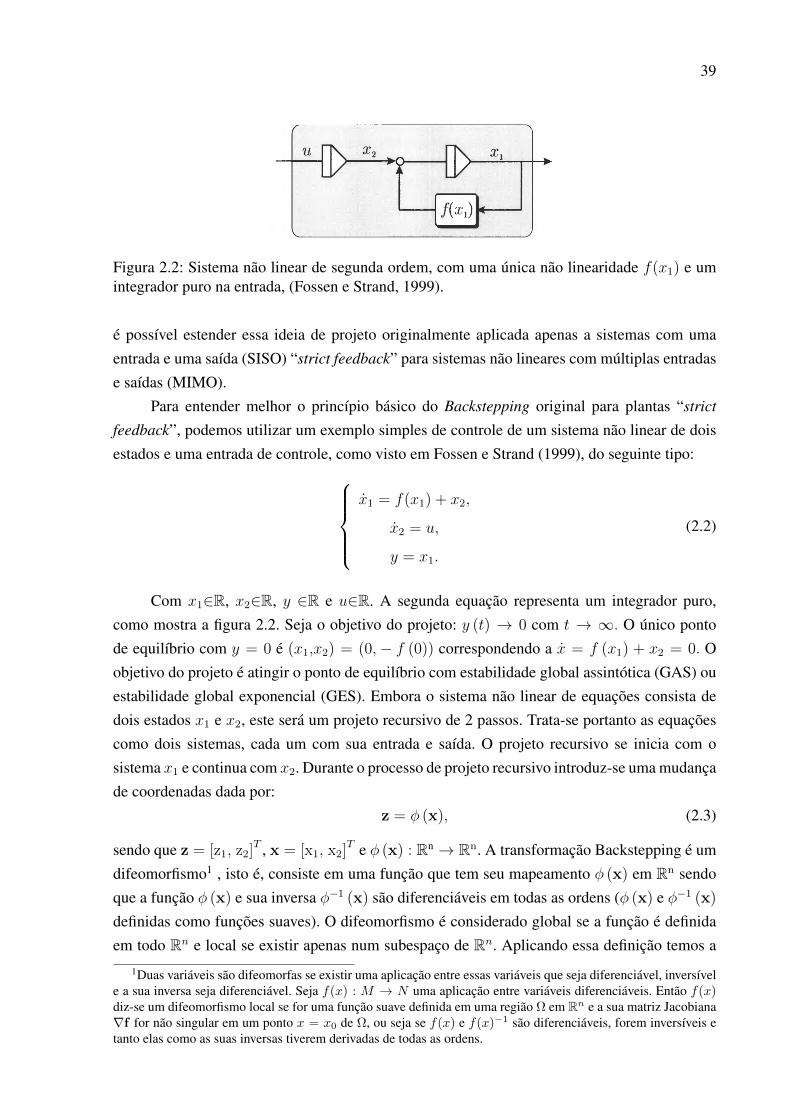
39
Figura 2.2: Sistema não linear de segunda ordem, com uma única não linearidade 𝑓(𝑥1) e umintegrador puro na entrada, (Fossen e Strand, 1999).
é possível estender essa ideia de projeto originalmente aplicada apenas a sistemas com umaentrada e uma saída (SISO) “strict feedback” para sistemas não lineares com múltiplas entradase saídas (MIMO).
Para entender melhor o princípio básico do Backstepping original para plantas “strict
feedback”, podemos utilizar um exemplo simples de controle de um sistema não linear de doisestados e uma entrada de controle, como visto em Fossen e Strand (1999), do seguinte tipo:⎧⎪⎪⎪⎨⎪⎪⎪⎩
1 = 𝑓(𝑥1) + 𝑥2,
2 = 𝑢,
𝑦 = 𝑥1.
(2.2)
Com 𝑥1∈R, 𝑥2∈R, 𝑦 ∈R e 𝑢∈R. A segunda equação representa um integrador puro,como mostra a figura 2.2. Seja o objetivo do projeto: 𝑦 (𝑡) → 0 com 𝑡 → ∞. O único pontode equilíbrio com 𝑦 = 0 é (𝑥1,𝑥2) = (0,− 𝑓 (0)) correspondendo a = 𝑓 (𝑥1) + 𝑥2 = 0. Oobjetivo do projeto é atingir o ponto de equilíbrio com estabilidade global assintótica (GAS) ouestabilidade global exponencial (GES). Embora o sistema não linear de equações consista dedois estados 𝑥1 e 𝑥2, este será um projeto recursivo de 2 passos. Trata-se portanto as equaçõescomo dois sistemas, cada um com sua entrada e saída. O projeto recursivo se inicia com osistema 𝑥1 e continua com 𝑥2. Durante o processo de projeto recursivo introduz-se uma mudançade coordenadas dada por:
z = 𝜑 (x), (2.3)
sendo que z = [z1, z2]𝑇 , x = [x1, x2]
𝑇 e 𝜑 (x) : Rn → Rn. A transformação Backstepping é umdifeomorfismo1 , isto é, consiste em uma função que tem seu mapeamento 𝜑 (x) em Rn sendoque a função 𝜑 (x) e sua inversa 𝜑−1 (x) são diferenciáveis em todas as ordens (𝜑 (x) e 𝜑−1 (x)
definidas como funções suaves). O difeomorfismo é considerado global se a função é definidaem todo R𝑛 e local se existir apenas num subespaço de R𝑛. Aplicando essa definição temos a
1Duas variáveis são difeomorfas se existir uma aplicação entre essas variáveis que seja diferenciável, inversívele a sua inversa seja diferenciável. Seja 𝑓(𝑥) : 𝑀 → 𝑁 uma aplicação entre variáveis diferenciáveis. Então 𝑓(𝑥)diz-se um difeomorfismo local se for uma função suave definida em uma região Ω em R𝑛 e a sua matriz Jacobiana∇f for não singular em um ponto 𝑥 = 𝑥0 de Ω, ou seja se 𝑓(𝑥) e 𝑓(𝑥)−1 são diferenciáveis, forem inversíveis etanto elas como as suas inversas tiverem derivadas de todas as ordens.

40
transformação inversa (Fossen e Strand, 1999):
x =𝜑−1 (z), (2.4)
que será utilizada para transformar um sistema não linear em outro sistema não linear, emtermos de um novo conjunto de estados, similarmente ao que é feito na análise de sistemaslineares (Moutinho, 2007).
Passo 1Para o sistema representado na equação 2.2 escolhe-se o estado 𝑥2 como uma entrada
virtual de controle enquanto nosso projeto tem como objetivo levar a saída 𝑦 = 𝑥1 a zero. Entãoa primeira variável Backstepping é escolhida como:
𝑧1 = 𝑥1. (2.5)
Para o sistema representado na equação 2.2 𝑥2 é tratado como entrada virtual do controle,e definida como:
𝑥2 , 𝛼1 + 𝑧2, (2.6)
onde 𝛼1 é a função de estabilização e 𝑧2 é uma nova variável de estado.Assim, o sistema 𝑧𝑖 pode ser escrito:
1 = 𝑓 (𝑥1) + 𝛼1 + 𝑧2 (2.7)
A nova variável de estado 𝑧2 não pode ser usada no primeiro passo, mas sua presença éimportante uma vez que 𝑧2 é necessária para casar o sistema 𝑧1 para o sistema seguinte, que é osistema 𝑧2 a ser considerado no próximo passo. Além disso, o Backstepping integrador implicaque as coordenadas durante o projeto recursivo sejam mudadas de (𝑥1, 𝑥2) para (𝑧1, 𝑧2).
Agora será projetada a função de estabilização 𝛼1 que fornecerá a retroalimentação neces-sária para o sistema 𝑧1. Para tanto, escolhe-se a função de estabilização como (Fossen e Strand,1999):
𝛼1 = −𝑓 (𝑥1) − 𝑘1𝑧1. (2.8)
Substituindo a equação 2.8 em 2.7 obtemos:
1 = 𝑓 (𝑥1) − 𝑓 (𝑥1) − 𝑘1𝑧1 + 𝑧2 (2.9)
1 = −𝑘1𝑧1 + 𝑧2. (2.10)
Um diagrama de blocos mostra a função de estabilização e a nova variável de estado mos-trada na figura 2.3. Note que quando 1(𝑥1) é integrado, cancela com o termo de realimentação−𝛼1(𝑥1).
41
Figura 2.3: Estabilização do sistema 𝑥1 pela função de estabilização 𝛼1 = 𝛼1(𝑥1) Fonte: Fossene Strand (1999).
Uma candidata a função de Lyapunov para o sistema 𝑧1 é:
𝑉1 =1
2𝑧21 (2.11)
1 = 𝑧11
1 = −𝑘1𝑧21 + 𝑧1𝑧2 (2.12)
Sendo que 𝑘1 > 0 é o ganho de retroalimentação. Como resultado temos a estabilizaçãodo sistema 𝑧1. Agora passamos ao passo 2 onde vamos trabalhar com o sistema 𝑧2.
Passo 2A dinâmica de 𝑧2 é computada pela diferenciação no tempo da equação 2.6 (Fossen e
Strand, 1999), que fica: ⎧⎨⎩ 2 = 2 − 1,
2 = 𝑢− 1.(2.13)
Uma candidata para função de Lyapunov é:⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
𝑉2 = 𝑉1 + 12𝑧22 ,
2 = 1 + 2𝑧2,
2 = (−𝑘1𝑧21 + 𝑧1𝑧2) + 2𝑧2,
2 = −𝑘1𝑧21 + 𝑧2 (𝑧1 + 2) ,
2 = −𝑘1𝑧21 + 𝑧2 (𝑢− 1 + 𝑧1) .
(2.14)
Como o sistema é descrito por apenas dois estados, a entrada de controle 𝑢 surge no passo2. Consequentemente, escolhendo-se a lei de controle como:

42
𝑢 = 1 − 𝑧1 − 𝑘2𝑧2 (2.15)
com 𝑘2 > 0, logo:2 = −𝑘1𝑧21 − 𝑘2𝑧
22 (2.16)
onde 2 < 0,∀𝑧1 = 0, 𝑧2 = 0.
2.1.2 Aspectos da implementação
Quando implementa-se a lei de controle da equação 2.15 é importante evitar expressõesenvolvendo derivadas no tempo dos estados. Para este sistema simples, somente 1 necessitaser definido. Isto pode ser feito pela diferenciação no tempo de 𝛼1 (𝑥1) ao longo das trajetóriasdos estados (Fossen e Strand, 1999). Além disso, pode-se computar 1 sem utilizar as derivadasdos estados:
1 = −𝜕𝑓 (𝑥1)
𝜕𝑥11 − 𝑘11 = −
(𝜕𝑓 (𝑥1)
𝜕𝑥1+ 𝑘1
)(𝑓 (𝑥1) + 𝑥2) . (2.17)
Deste modo, a expressão final para a lei de controle é:
𝑢 = −(𝜕𝑓 (𝑥1)
𝜕𝑥1+ 𝑘1
)(𝑓 (𝑥1) + 𝑥2) − 𝑥1 − 𝑘2 (𝑥2 + 𝑓 (𝑥1) + 𝑘1𝑥1) . (2.18)
Se 𝑓 (𝑥1) = −𝑥1, temos:
𝑢 = − (−1 + 𝑘1) (−𝑥1 + 𝑥2) − 𝑥1 − 𝑘2 (𝑥2 − 𝑥1 + 𝑘1𝑥1)
𝑢 = − (2 + 𝑘1𝑘2 − 𝑘1 − 𝑘2)𝑥1 − (𝑘1 + 𝑘2 − 1)𝑥2 (2.19)
que é uma lei de controle PD padrão. A expressão geral para 𝑢 é, entretanto, uma lei de controlenão linear com retroalimentação dependente da função não linear 𝑓 (𝑥1).
2.1.3 Transformação de coordenadas do Backstepping
A transformação de coordenadas do Backstepping 𝑧 = 𝜑 (𝑥) toma a forma:[𝑧1
𝑧2
]=
[𝑥1
𝑥2 + 𝑓 (𝑥1) + 𝑘1𝑥1
], (2.20)
43
enquanto a inversa da transformação 𝑥 = 𝜑−1 (𝑧) é:[𝑥1
𝑥2
]=
[𝑧1
𝑧2 + 𝑓 (𝑧1) + 𝑘1𝑧1
]. (2.21)
2.1.4 A verificação final
Uma metodologia permite verificar se o projeto do Backstepping foi realizado correta-mente. A dinâmica do sistema em malha fechada nas coordenadas (𝑧1,𝑧2) deverá ser escritacomo a soma da matriz diagonal e da anti-simétrica multiplicadas pelo vetor de estados (Fossene Strand, 1999). Isto pode ser visto escrevendo a dinâmica resultante na forma:[
1
2
]= −
[𝑘1 0
0 𝑘2
]⏟ ⏞
Matriz diagonal
[𝑧1
𝑧2
]+
[0 1
−1 0
]⏟ ⏞
Matriz anti-simétrica
[𝑧1
𝑧2
], (2.22)
ou equivalentemente:z = −Kz + Sz (2.23)
com z = [𝑧1,𝑧2]𝑇 , K = 𝑑𝑖𝑎𝑔 𝑘1,𝑘2 > 0 e:
S = −S𝑇 =
[0 1
−1 0
], (2.24)
sendo que S satisfaz z𝑇Sz = 0, ∀z. Em alguns casos a matriz diagonal é a função de estado,que é K(z) > 0. Este é o caso quando amortecimento é adicionado ou quando alguma nãolinearidade não é cancelada pelo controlador.
A estabilidade do sistema pode ser verificada aplicando o método direto de Lyapunovatravés da escolha das equações:⎧⎪⎪⎪⎨⎪⎪⎪⎩
𝑉2 = 12z𝑇z,
2 = z𝑇 (−Kz + Sz),
2 = −z𝑇Kz.
(2.25)
As equações asseguram que o ponto de equilíbrio (𝑥1, 𝑥2) = (0, − 𝑓(0)) é globalmenteassintóticamente estável (GAS), com K > 0, onde 2 < 0,∀z1 = 0.
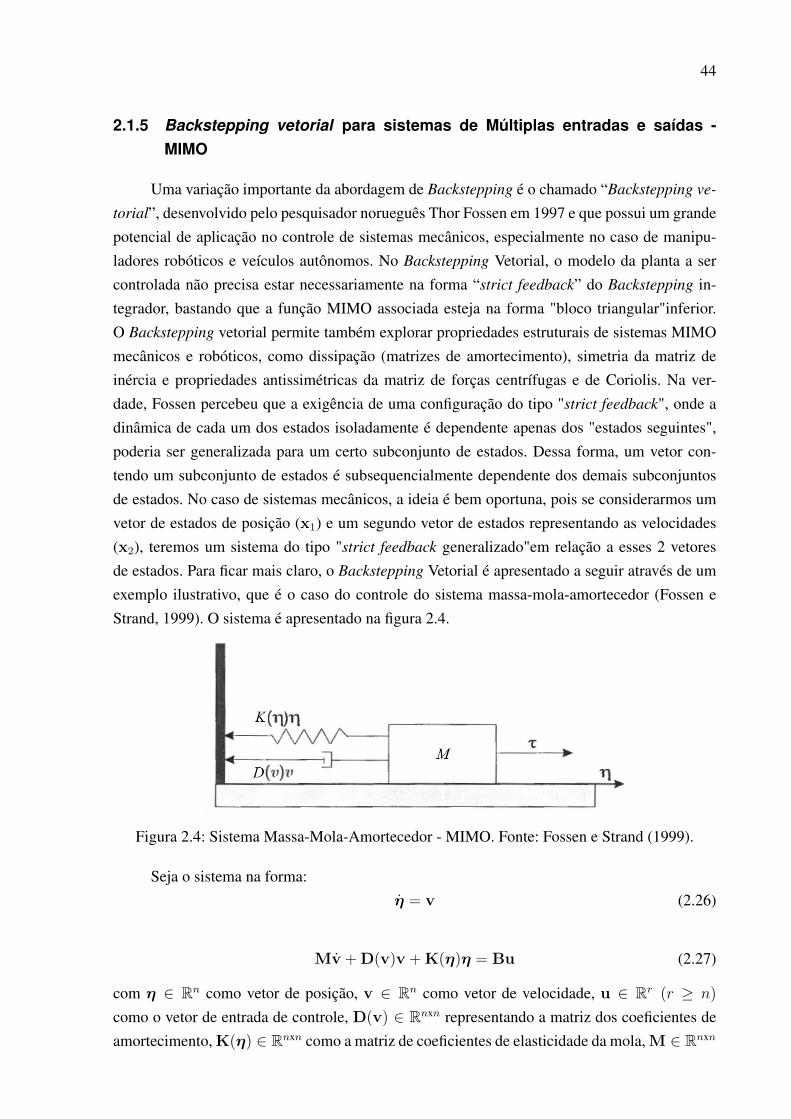
44
2.1.5 Backstepping vetorial para sistemas de Múltiplas entradas e saídas -MIMO
Uma variação importante da abordagem de Backstepping é o chamado “Backstepping ve-
torial”, desenvolvido pelo pesquisador norueguês Thor Fossen em 1997 e que possui um grandepotencial de aplicação no controle de sistemas mecânicos, especialmente no caso de manipu-ladores robóticos e veículos autônomos. No Backstepping Vetorial, o modelo da planta a sercontrolada não precisa estar necessariamente na forma “strict feedback” do Backstepping in-tegrador, bastando que a função MIMO associada esteja na forma "bloco triangular"inferior.O Backstepping vetorial permite também explorar propriedades estruturais de sistemas MIMOmecânicos e robóticos, como dissipação (matrizes de amortecimento), simetria da matriz deinércia e propriedades antissimétricas da matriz de forças centrífugas e de Coriolis. Na ver-dade, Fossen percebeu que a exigência de uma configuração do tipo "strict feedback", onde adinâmica de cada um dos estados isoladamente é dependente apenas dos "estados seguintes",poderia ser generalizada para um certo subconjunto de estados. Dessa forma, um vetor con-tendo um subconjunto de estados é subsequencialmente dependente dos demais subconjuntosde estados. No caso de sistemas mecânicos, a ideia é bem oportuna, pois se considerarmos umvetor de estados de posição (x1) e um segundo vetor de estados representando as velocidades(x2), teremos um sistema do tipo "strict feedback generalizado"em relação a esses 2 vetoresde estados. Para ficar mais claro, o Backstepping Vetorial é apresentado a seguir através de umexemplo ilustrativo, que é o caso do controle do sistema massa-mola-amortecedor (Fossen eStrand, 1999). O sistema é apresentado na figura 2.4.
Figura 2.4: Sistema Massa-Mola-Amortecedor - MIMO. Fonte: Fossen e Strand (1999).
Seja o sistema na forma: = v (2.26)
Mv + D(v)v + K(𝜂)𝜂 = Bu (2.27)
com 𝜂 ∈ R𝑛 como vetor de posição, v ∈ R𝑛 como vetor de velocidade, u ∈ R𝑟 (𝑟 ≥ 𝑛)
como o vetor de entrada de controle, D(v) ∈ R𝑛x𝑛 representando a matriz dos coeficientes deamortecimento, K(𝜂) ∈ R𝑛x𝑛 como a matriz de coeficientes de elasticidade da mola, M ∈ R𝑛x𝑛

45
como a matriz de inércia e B ∈ R𝑛x𝑟 como a matriz de entrada. Dessa maneira, procedemoscom o Backstepping em dois passos:
Passo 1 Seja v o vetor de controle virtual:
v , s + 𝛼1, (2.28)
sendo que s = v + Λv, que é o novo vetor de estado utilizado no controle de rastreamento,em que v = v − v𝑑 e 𝜂 = 𝜂 − 𝜂𝑑 são os erros de velocidade e de posição respectivamente,Λ é matriz diagonal de elementos positivos e 𝛼1 é o campo vetorial estabilizante. A definiçãodo vetor s foi motivada por Slotine e Li (1987) que introduziram o vetor s como uma medidade rastreamento quando em seu projeto para o controle adaptativo para robôs. Esta abordagempermite transformar o modelo não linear em estado de espaço para a forma que introduz os erroscomo mostrado a seguir:
Ms + D(s) = Mv + D(v)v −Mv𝑟 + D(v)v𝑟. (2.29)
Esta equação pode ser combinada com a equação 2.27 obtendo:
Ms + D(s) = Bu−Mv𝑟 −D(v)v𝑟 −K(𝜂)𝜂, (2.30)
com v𝑟 apresentado como uma referência “virtual” da trajetória:
v𝑟 = v − s
= v𝑑 −Λ𝜂. (2.31)
A dinâmica da posição do erro do Passo 1 pode ser escrita como:
𝜂 = v − v𝑑
= s + 𝛼1 − v𝑑 (𝛼1 = v𝑟 = v − s) (2.32)
= −Λ− 𝜂 + s.
consequentemente escolhemos a função candidata de Lyapunov como:
𝑉1 =1
2𝜂𝑇K𝑝𝜂, K𝑝 = K𝑇
𝑝 > 0, (2.33)
e sua derivada fica:
1 = 𝜂𝑇K𝑝𝜂= 𝜂𝑇K𝑝(−Λ𝜂 + s)
= −𝜂𝑇K𝑝Λ𝜂 + s𝑇K𝑝𝜂. (2.34)

46
Passo 2No segundo passo será escolhida uma nova função candidata de Lyapunov motivada pela
energia “pseudo” cinética:
𝑉2 = 𝑉1 +1
2s𝑇Ms, M = M𝑇 > 0, (2.35)
e sua derivada fica:
2 = 1 + s𝑇Ms, (2.36)
= −s𝑇 (Bu−Mv𝑟 −D(v)v𝑟 −K(𝜂)𝜂 −D(v)s) − 𝜂𝑇K𝑝Λ𝜂 + s𝑇K𝑝𝜂,= −s𝑇D(v)s + s𝑇 (Bu−Mv𝑟 −D(v)v𝑟 −K(𝜂)𝜂 + K𝑝𝜂) − 𝜂𝑇K𝑝Λ𝜂.
Agora, a lei de controle pode ser proposta como:
Bu = Mv𝑟 + D(v)v𝑟 + K(𝜂)𝜂𝑑 −K𝑝𝜂 −K𝑑s, (2.37)
com K𝑑 > 0, a derivada da equação de Lyapunov fica:
2 = −s𝑇 (D(v) + K𝑑)s− 𝜂𝑇 (K(𝜂) + K𝑝Λ)𝜂, (2.38)
com K > 0 e K𝑝 > 0, onde 2 < 0,∀s1 = 0 e 𝜂 = 0.Desde que 𝑉2 seja definida positiva e 2 é definida negativa, no ponto de equilíbrio
(𝜂, s) = (0, 0) o sistema é globalmente exponencialmente estável-GES. além disso, a con-vergência de s → 0 e 𝜂 → 0 implica que v → 0. Na implementação da lei de controle daequação 2.37 assume-se que B é inversível no caso da matriz ser retangular (r ≥ n):
B† = B𝑇 (BB𝑇 )−1, (2.39)
ou que B−1 existe se for uma matriz quadrada (r = n), assim temos:
u = B†[Mv𝑟 + D(v)v𝑟 + K(𝜂)𝜂𝑑 −K𝑝𝜂 −K𝑑s]. (2.40)
2.2 Controle por Modos Deslizantes (SMC)
Outra técnica de controle não linear importante é a abordagem de Modos Deslizantes ouSliding Mode Control, tema sobre o qual há dezenas de livros publicados como por exemplo:Edwards e Spurgeon (1998), Bartolini et al. (2008), Liu e Wang (2012), Slotine et al. (1991) eUtkin et al. (2009).
Na prática, a grande maioria dos sistemas controlados, sejam mecânicos ou industriais,são do tipo MIMO (múltiplas entradas e múltiplas saídas). Para esses sistemas, o problema de
47
controle é muito complexo devido ao acoplamento entre as diversas entradas e saídas. A tarefase torna ainda mais difícil se houver parâmetros incertos ou variantes no tempo no modelodo sistema controlado. Por conta disso, percebe-se que ao contrário da enorme quantidade detrabalhos de projeto de controle para sistemas SISO, existem relativamente poucos resultadosdisponíveis para o caso geral de sistemas MIMO, tanto para Modos Deslizantes como paraBackstepping. Vale ressaltar que o projeto por Modos Deslizantes é comumente encontradocombinado com outras técnicas de controle como Backstepping, passividade, H-infinito, PID eFuzzy.
O controle por modos deslizantes consiste basicamente em se reduzir o problema de con-trole de um sistema descrito por equações não-lineares de ordem 𝑛, para um sistema de 1a
ordem, com incertezas nos parâmetros. Deste modo, um sistema descrito por equações de es-tado sendo a entrada um termo descontínuo através de uma superfície definida no espaço deestado, a metodologia de SMC permite projetar uma lei de controle capaz de fazer com quetodas as trajetórias desse sistema sejam convergentes a uma superfície, chamada de superfíciedeslizante 𝑆(𝑡). O projeto desta superfície deve ser escolhido de modo que todas as trajetóriasdentro da superfície 𝑆(𝑡) convirjam para os valores desejados. Após a trajetória atingir o inte-rior da superfície deslizante, é dito que o sistema está operando em modo deslizante, quando osistema torna-se insensível a variações paramétricas e perturbações externas. Essa propriedadegarante robustez ao SMC.
Segundo Slotine et al. (1991), pode-se obter através de sistemas transformados uma ótimaperformance apesar da presença de incertezas paramétricas arbitrárias. Essa performance, entre-tanto, é obtida mediante o preço de uma atividade extrema do controlador, fenômeno conhecidocomo chattering.
O projeto do controlador SMC é obtido através de duas etapas distintas. A primeira etapaconsiste em definir uma superfície deslizante, que torna o sistema dinâmico estável quando atrajetória ocorre sobre a superfície deslizante e a segunda etapa consiste em definir uma lei decontrole que garanta que todas as trajetórias convirjam para a superfície deslizante.
2.2.1 Superfície de deslizamento
Seja o sistema não linear de ordem 𝑛 com uma única entrada descrito por:
𝑥(n) = 𝑓(x,𝑡) + 𝑏(x,𝑡)𝑢+ 𝑑(𝑡) 𝑐𝑜𝑚 𝑛 = 2, 3, ... (2.41)
sendo as funções 𝑓(𝑥, 𝑡) e 𝑏(𝑥, 𝑡) geralmente não lineares e dependentes do tempo. Para oproblema de rastreamento ser solucionado usando o controle finito 𝑢, o estado inicial desejadox𝑑(0) deve ser tal que:
x𝑑(0) = 𝑥(0). (2.42)
Seja 𝑥 = 𝑥−𝑥𝑑 o erro de acompanhamento associado à trajetória desejada e x = x−x𝑑 =
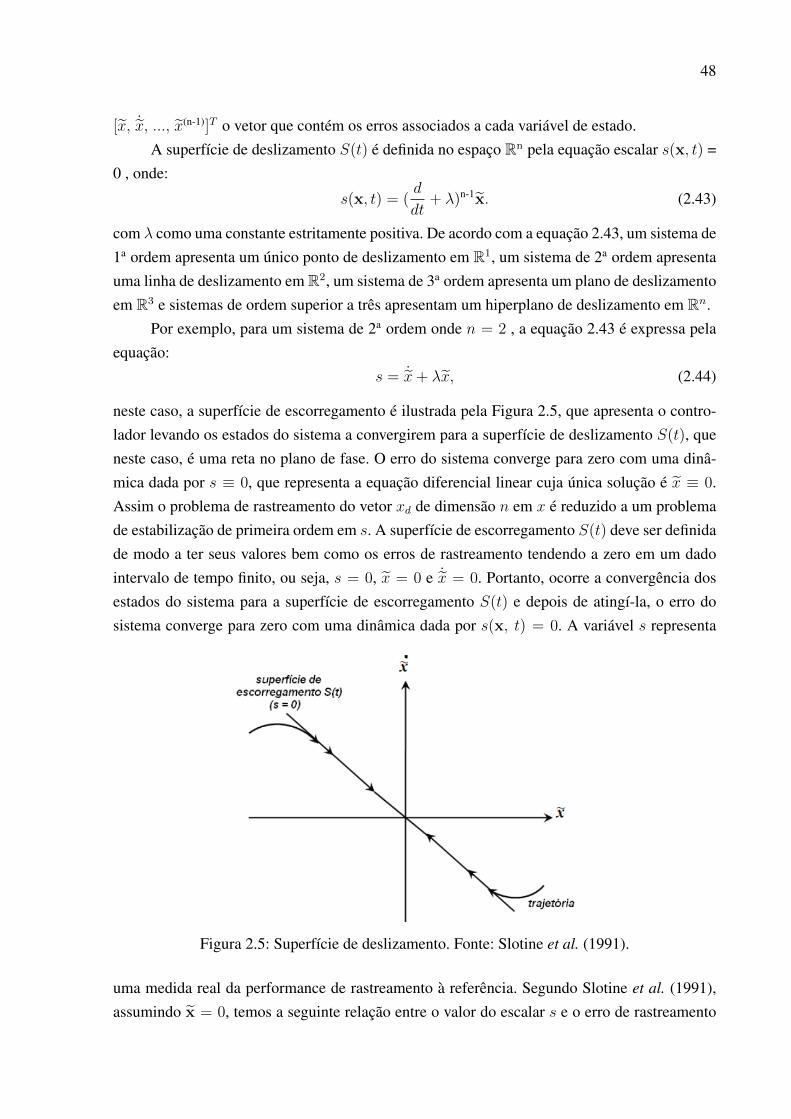
48
[𝑥, 𝑥, ..., 𝑥(n-1)]𝑇 o vetor que contém os erros associados a cada variável de estado.A superfície de deslizamento 𝑆(𝑡) é definida no espaço Rn pela equação escalar 𝑠(x, 𝑡) =
0 , onde:
𝑠(x, 𝑡) = (𝑑
𝑑𝑡+ 𝜆)n-1x. (2.43)
com 𝜆 como uma constante estritamente positiva. De acordo com a equação 2.43, um sistema de1a ordem apresenta um único ponto de deslizamento em R1, um sistema de 2a ordem apresentauma linha de deslizamento em R2, um sistema de 3a ordem apresenta um plano de deslizamentoem R3 e sistemas de ordem superior a três apresentam um hiperplano de deslizamento em R𝑛.
Por exemplo, para um sistema de 2a ordem onde 𝑛 = 2 , a equação 2.43 é expressa pelaequação:
𝑠 = 𝑥+ 𝜆𝑥, (2.44)
neste caso, a superfície de escorregamento é ilustrada pela Figura 2.5, que apresenta o contro-lador levando os estados do sistema a convergirem para a superfície de deslizamento 𝑆(𝑡), queneste caso, é uma reta no plano de fase. O erro do sistema converge para zero com uma dinâ-mica dada por 𝑠 ≡ 0, que representa a equação diferencial linear cuja única solução é 𝑥 ≡ 0.Assim o problema de rastreamento do vetor 𝑥𝑑 de dimensão 𝑛 em 𝑥 é reduzido a um problemade estabilização de primeira ordem em 𝑠. A superfície de escorregamento 𝑆(𝑡) deve ser definidade modo a ter seus valores bem como os erros de rastreamento tendendo a zero em um dadointervalo de tempo finito, ou seja, 𝑠 = 0, 𝑥 = 0 e 𝑥 = 0. Portanto, ocorre a convergência dosestados do sistema para a superfície de escorregamento 𝑆(𝑡) e depois de atingí-la, o erro dosistema converge para zero com uma dinâmica dada por 𝑠(x, 𝑡) = 0. A variável 𝑠 representa
Figura 2.5: Superfície de deslizamento. Fonte: Slotine et al. (1991).
uma medida real da performance de rastreamento à referência. Segundo Slotine et al. (1991),assumindo x = 0, temos a seguinte relação entre o valor do escalar 𝑠 e o erro de rastreamento
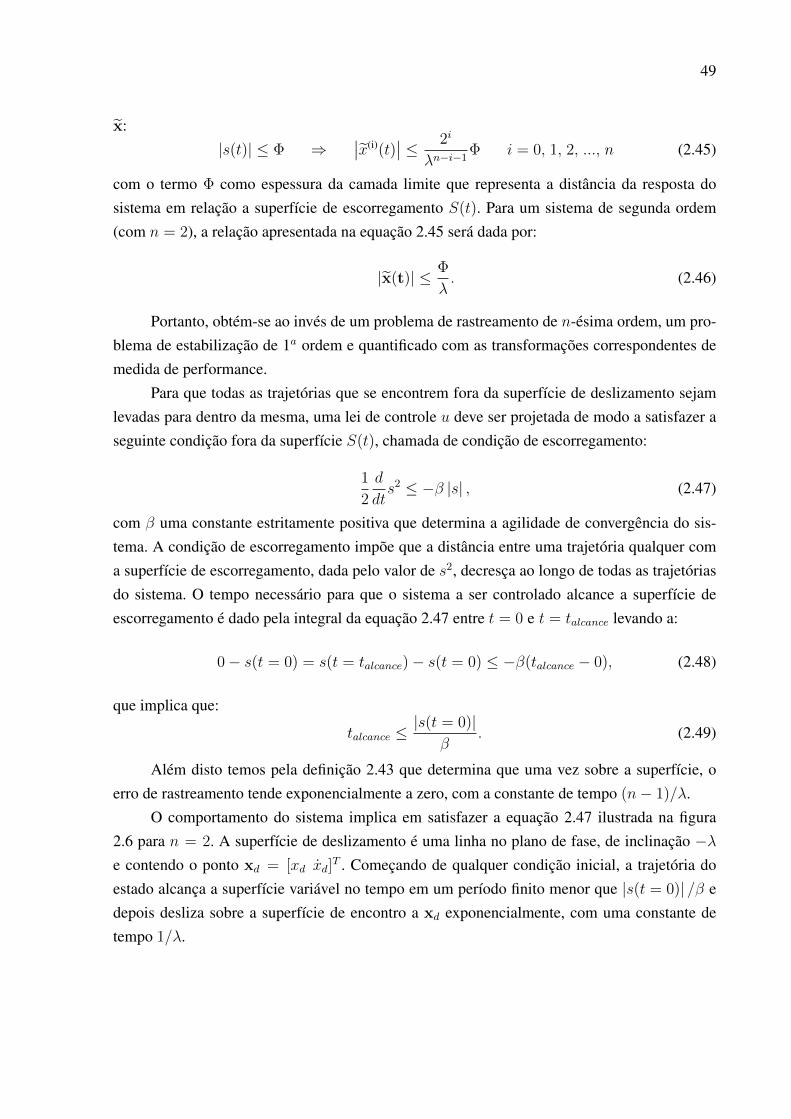
49
x:|𝑠(𝑡)| ≤ Φ ⇒
𝑥(i)(𝑡)≤ 2𝑖
𝜆𝑛−𝑖−1Φ 𝑖 = 0, 1, 2, ..., 𝑛 (2.45)
com o termo Φ como espessura da camada limite que representa a distância da resposta dosistema em relação a superfície de escorregamento 𝑆(𝑡). Para um sistema de segunda ordem(com 𝑛 = 2), a relação apresentada na equação 2.45 será dada por:
|x(t)| ≤ Φ
𝜆. (2.46)
Portanto, obtém-se ao invés de um problema de rastreamento de 𝑛-ésima ordem, um pro-blema de estabilização de 1𝑎 ordem e quantificado com as transformações correspondentes demedida de performance.
Para que todas as trajetórias que se encontrem fora da superfície de deslizamento sejamlevadas para dentro da mesma, uma lei de controle 𝑢 deve ser projetada de modo a satisfazer aseguinte condição fora da superfície 𝑆(𝑡), chamada de condição de escorregamento:
1
2
𝑑
𝑑𝑡𝑠2 ≤ −𝛽 |𝑠| , (2.47)
com 𝛽 uma constante estritamente positiva que determina a agilidade de convergência do sis-tema. A condição de escorregamento impõe que a distância entre uma trajetória qualquer coma superfície de escorregamento, dada pelo valor de 𝑠2, decresça ao longo de todas as trajetóriasdo sistema. O tempo necessário para que o sistema a ser controlado alcance a superfície deescorregamento é dado pela integral da equação 2.47 entre 𝑡 = 0 e 𝑡 = 𝑡𝑎𝑙𝑐𝑎𝑛𝑐𝑒 levando a:
0 − 𝑠(𝑡 = 0) = 𝑠(𝑡 = 𝑡𝑎𝑙𝑐𝑎𝑛𝑐𝑒) − 𝑠(𝑡 = 0) ≤ −𝛽(𝑡𝑎𝑙𝑐𝑎𝑛𝑐𝑒 − 0), (2.48)
que implica que:
𝑡𝑎𝑙𝑐𝑎𝑛𝑐𝑒 ≤|𝑠(𝑡 = 0)|
𝛽. (2.49)
Além disto temos pela definição 2.43 que determina que uma vez sobre a superfície, oerro de rastreamento tende exponencialmente a zero, com a constante de tempo (𝑛− 1)/𝜆.
O comportamento do sistema implica em satisfazer a equação 2.47 ilustrada na figura2.6 para 𝑛 = 2. A superfície de deslizamento é uma linha no plano de fase, de inclinação −𝜆e contendo o ponto x𝑑 = [𝑥𝑑 𝑑]
𝑇 . Começando de qualquer condição inicial, a trajetória doestado alcança a superfície variável no tempo em um período finito menor que |𝑠(𝑡 = 0)| /𝛽 edepois desliza sobre a superfície de encontro a x𝑑 exponencialmente, com uma constante detempo 1/𝜆.
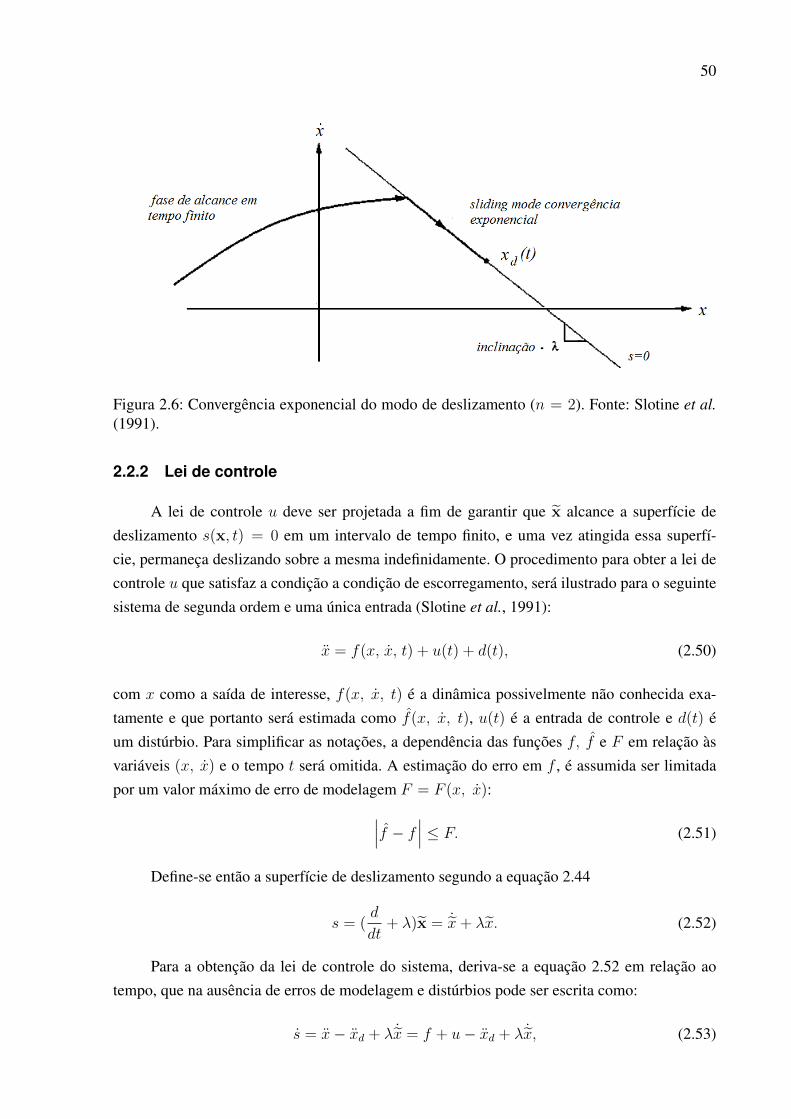
50
Figura 2.6: Convergência exponencial do modo de deslizamento (𝑛 = 2). Fonte: Slotine et al.(1991).
2.2.2 Lei de controle
A lei de controle 𝑢 deve ser projetada a fim de garantir que x alcance a superfície dedeslizamento 𝑠(x, 𝑡) = 0 em um intervalo de tempo finito, e uma vez atingida essa superfí-cie, permaneça deslizando sobre a mesma indefinidamente. O procedimento para obter a lei decontrole 𝑢 que satisfaz a condição a condição de escorregamento, será ilustrado para o seguintesistema de segunda ordem e uma única entrada (Slotine et al., 1991):
= 𝑓(𝑥, , 𝑡) + 𝑢(𝑡) + 𝑑(𝑡), (2.50)
com 𝑥 como a saída de interesse, 𝑓(𝑥, , 𝑡) é a dinâmica possivelmente não conhecida exa-tamente e que portanto será estimada como 𝑓(𝑥, , 𝑡), 𝑢(𝑡) é a entrada de controle e 𝑑(𝑡) éum distúrbio. Para simplificar as notações, a dependência das funções 𝑓, 𝑓 e 𝐹 em relação àsvariáveis (𝑥, ) e o tempo 𝑡 será omitida. A estimação do erro em 𝑓 , é assumida ser limitadapor um valor máximo de erro de modelagem 𝐹 = 𝐹 (𝑥, ):
𝑓 − 𝑓≤ 𝐹. (2.51)
Define-se então a superfície de deslizamento segundo a equação 2.44
𝑠 = (𝑑
𝑑𝑡+ 𝜆)x = 𝑥+ 𝜆𝑥. (2.52)
Para a obtenção da lei de controle do sistema, deriva-se a equação 2.52 em relação aotempo, que na ausência de erros de modelagem e distúrbios pode ser escrita como:
= − 𝑑 + 𝜆𝑥 = 𝑓 + 𝑢− 𝑑 + 𝜆𝑥, (2.53)

51
a lei de controle que atinge 𝑠 = = 0 é dada por:
= −𝑓 + 𝑑 − 𝜆𝑥. (2.54)
O termo conhecido como lei de controle equivalente pode ser interpretado como a me-lhor estimativa para satisfazer a equação 2.47. Para considerar as incertezas do modelo, deve-seadicionar um termo descontínuo ao longo da superfície 𝑆(𝑡), alterando a lei de controle para:
𝑢 = − 𝑘 𝑠𝑔𝑛(𝑠), (2.55)
𝑢 = −𝑓 + 𝑑 − 𝜆𝑥− 𝑘 𝑠𝑔𝑛(𝑠). (2.56)
Substituindo a equação 2.56 na equação 2.53 obtemos:
= 𝑓 + 𝑢− 𝑥𝑑 + 𝜆𝑥, = 𝑓 − 𝑓 + 𝑑 − 𝜆𝑥+ 𝑑 − 𝜆𝑥− 𝑘 𝑠𝑔𝑛(𝑠) − 𝑥𝑑 + 𝜆𝑥, = 𝑓 − 𝑓 − 𝑘 𝑠𝑔𝑛(𝑠). (2.57)
Sendo 𝑘 um ganho definido no projeto que é chaveado pela função sinal (𝑠𝑔𝑛), que temos seguintes valores:
𝑠𝑔𝑛(𝑠) = +1, se 𝑠 > 0,
𝑠𝑔𝑛(𝑠) = −1 ; se 𝑠 < 0.
Escolhendo 𝑘 para garantir a condição de escorregamento temos:
1
2
𝑑
𝑑𝑡𝑠2 = 𝑠 =
[𝑓 − 𝑓 − 𝑘 𝑠𝑔𝑛(𝑠)
]𝑠 = (𝑓 − 𝑓)𝑠− 𝑘 |𝑠| . (2.58)
Desta maneira se definirmos:𝑘 = 𝐹 + 𝛽, (2.59)
substituindo a equação 2.59 em 2.58 temos:
1
2
𝑑
𝑑𝑡𝑠2 = (𝑓 − 𝑓)𝑠− (𝐹 − 𝛽) |𝑠| ,
1
2
𝑑
𝑑𝑡𝑠2 = 𝐹𝑠− 𝐹𝑠− 𝛽𝑠,
1
2
𝑑
𝑑𝑡𝑠2 ≤ −𝛽 |𝑠| . (2.60)
A equação resultante 2.60, é obtida como esperado verificando a condição da equaçãoanterior 2.47, satisfazendo a condição de deslizamento. Pode-se notar a partir da equação 2.59que a descontinuidade do controle 𝑘 sobre a superfície 𝑆 = 0, aumenta de acordo com a me-dida das incertezas paramétricas. Entretanto, mediante a presença de imprecisões no modelo e
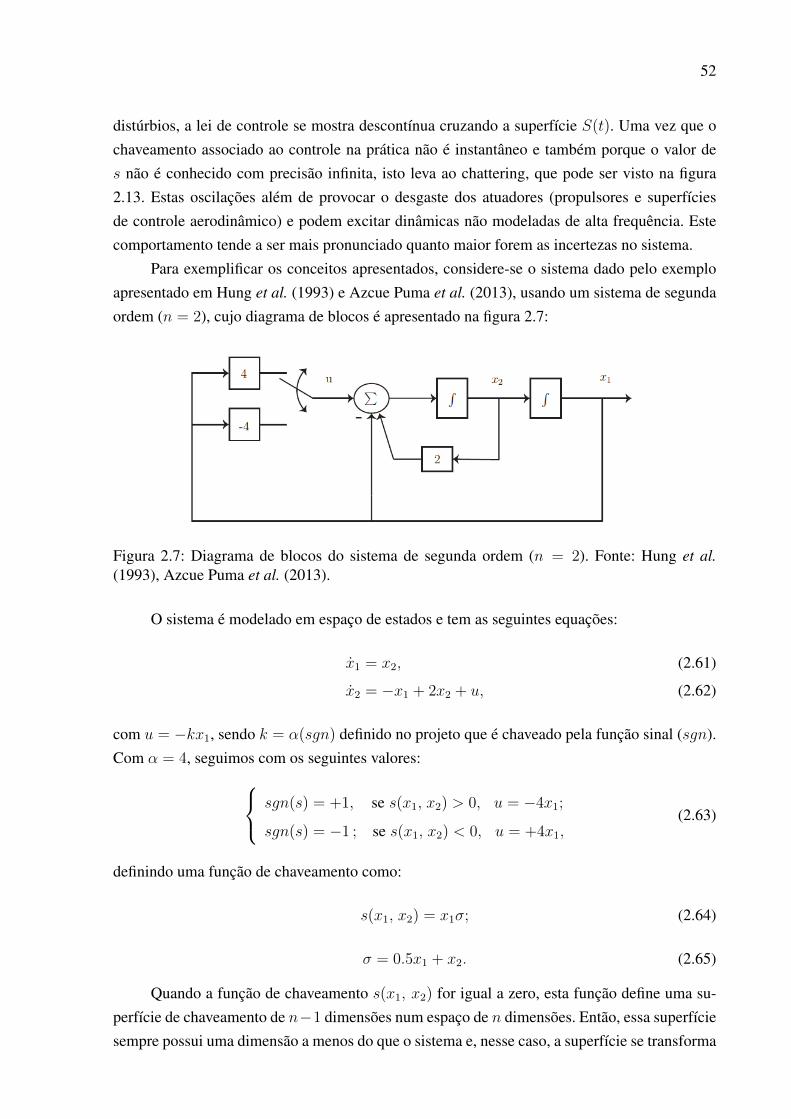
52
distúrbios, a lei de controle se mostra descontínua cruzando a superfície 𝑆(𝑡). Uma vez que ochaveamento associado ao controle na prática não é instantâneo e também porque o valor de𝑠 não é conhecido com precisão infinita, isto leva ao chattering, que pode ser visto na figura2.13. Estas oscilações além de provocar o desgaste dos atuadores (propulsores e superfíciesde controle aerodinâmico) e podem excitar dinâmicas não modeladas de alta frequência. Estecomportamento tende a ser mais pronunciado quanto maior forem as incertezas no sistema.
Para exemplificar os conceitos apresentados, considere-se o sistema dado pelo exemploapresentado em Hung et al. (1993) e Azcue Puma et al. (2013), usando um sistema de segundaordem (𝑛 = 2), cujo diagrama de blocos é apresentado na figura 2.7:
Figura 2.7: Diagrama de blocos do sistema de segunda ordem (𝑛 = 2). Fonte: Hung et al.(1993), Azcue Puma et al. (2013).
O sistema é modelado em espaço de estados e tem as seguintes equações:
1 = 𝑥2, (2.61)
2 = −𝑥1 + 2𝑥2 + 𝑢, (2.62)
com 𝑢 = −𝑘𝑥1, sendo 𝑘 = 𝛼(𝑠𝑔𝑛) definido no projeto que é chaveado pela função sinal (𝑠𝑔𝑛).Com 𝛼 = 4, seguimos com os seguintes valores:⎧⎨⎩ 𝑠𝑔𝑛(𝑠) = +1, se 𝑠(𝑥1, 𝑥2) > 0, 𝑢 = −4𝑥1;
𝑠𝑔𝑛(𝑠) = −1 ; se 𝑠(𝑥1, 𝑥2) < 0, 𝑢 = +4𝑥1,(2.63)
definindo uma função de chaveamento como:
𝑠(𝑥1, 𝑥2) = 𝑥1𝜎; (2.64)
𝜎 = 0.5𝑥1 + 𝑥2. (2.65)
Quando a função de chaveamento 𝑠(𝑥1, 𝑥2) for igual a zero, esta função define uma su-perfície de chaveamento de 𝑛−1 dimensões num espaço de 𝑛 dimensões. Então, essa superfíciesempre possui uma dimensão a menos do que o sistema e, nesse caso, a superfície se transforma
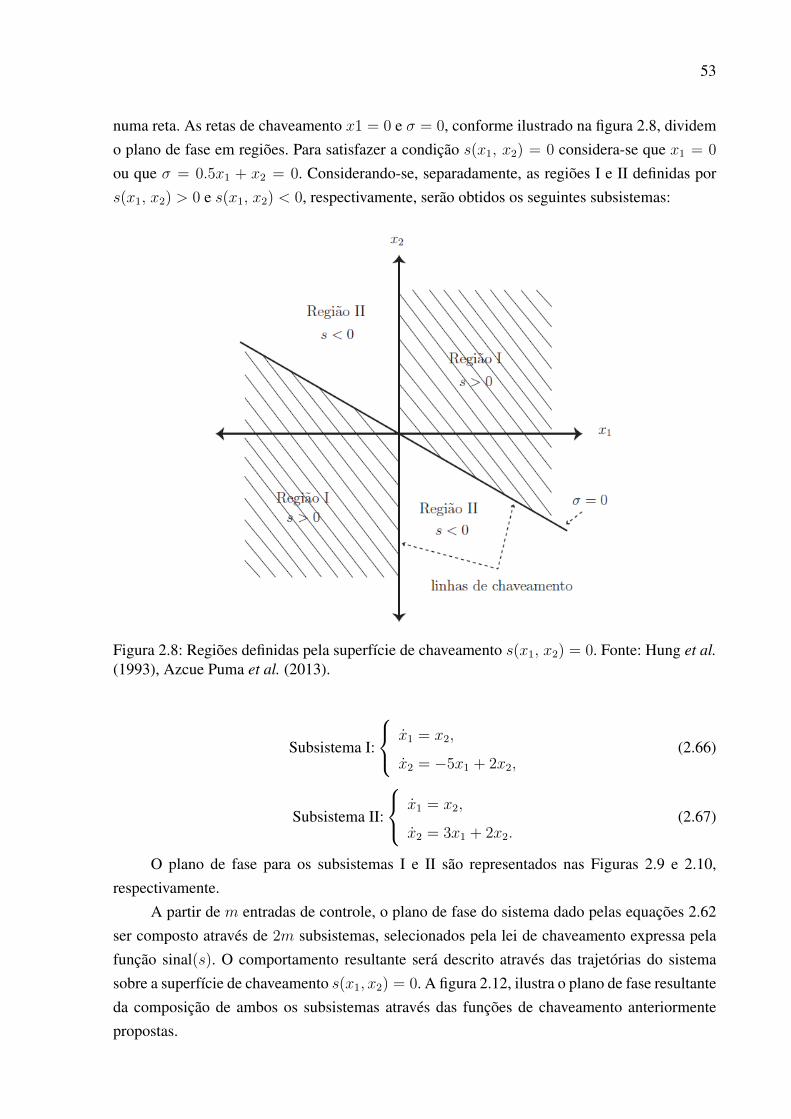
53
numa reta. As retas de chaveamento 𝑥1 = 0 e 𝜎 = 0, conforme ilustrado na figura 2.8, dividemo plano de fase em regiões. Para satisfazer a condição 𝑠(𝑥1, 𝑥2) = 0 considera-se que 𝑥1 = 0
ou que 𝜎 = 0.5𝑥1 + 𝑥2 = 0. Considerando-se, separadamente, as regiões I e II definidas por𝑠(𝑥1, 𝑥2) > 0 e 𝑠(𝑥1, 𝑥2) < 0, respectivamente, serão obtidos os seguintes subsistemas:
Figura 2.8: Regiões definidas pela superfície de chaveamento 𝑠(𝑥1, 𝑥2) = 0. Fonte: Hung et al.(1993), Azcue Puma et al. (2013).
Subsistema I:
⎧⎨⎩ 1 = 𝑥2,
2 = −5𝑥1 + 2𝑥2,(2.66)
Subsistema II:
⎧⎨⎩ 1 = 𝑥2,
2 = 3𝑥1 + 2𝑥2.(2.67)
O plano de fase para os subsistemas I e II são representados nas Figuras 2.9 e 2.10,respectivamente.
A partir de 𝑚 entradas de controle, o plano de fase do sistema dado pelas equações 2.62ser composto através de 2𝑚 subsistemas, selecionados pela lei de chaveamento expressa pelafunção sinal(𝑠). O comportamento resultante será descrito através das trajetórias do sistemasobre a superfície de chaveamento 𝑠(𝑥1, 𝑥2) = 0. A figura 2.12, ilustra o plano de fase resultanteda composição de ambos os subsistemas através das funções de chaveamento anteriormentepropostas.
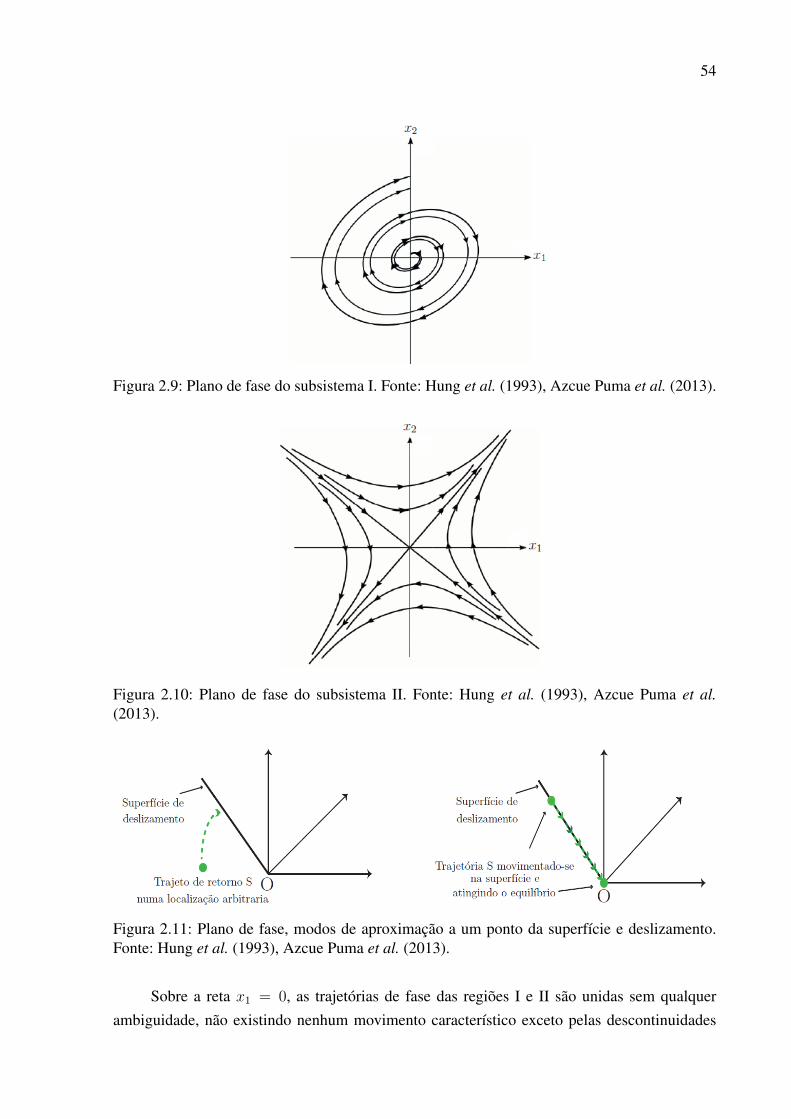
54
Figura 2.9: Plano de fase do subsistema I. Fonte: Hung et al. (1993), Azcue Puma et al. (2013).
Figura 2.10: Plano de fase do subsistema II. Fonte: Hung et al. (1993), Azcue Puma et al.(2013).
Figura 2.11: Plano de fase, modos de aproximação a um ponto da superfície e deslizamento.Fonte: Hung et al. (1993), Azcue Puma et al. (2013).
Sobre a reta 𝑥1 = 0, as trajetórias de fase das regiões I e II são unidas sem qualquerambiguidade, não existindo nenhum movimento característico exceto pelas descontinuidades
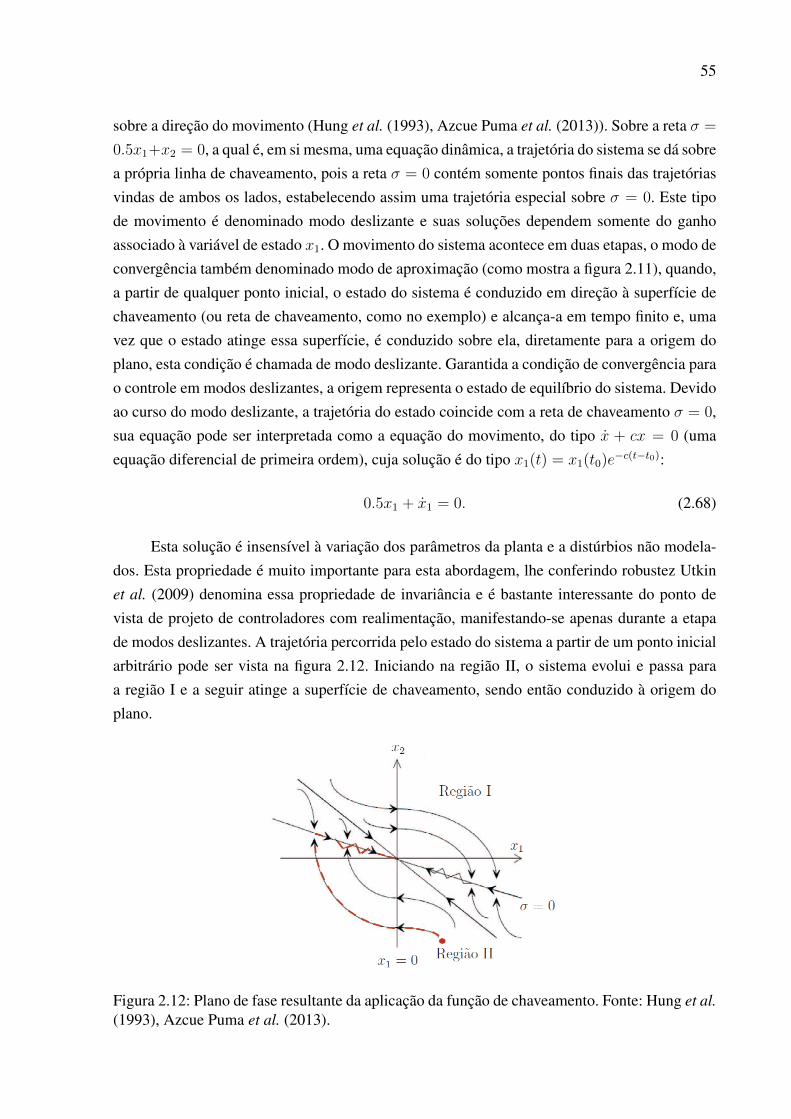
55
sobre a direção do movimento (Hung et al. (1993), Azcue Puma et al. (2013)). Sobre a reta 𝜎 =
0.5𝑥1+𝑥2 = 0, a qual é, em si mesma, uma equação dinâmica, a trajetória do sistema se dá sobrea própria linha de chaveamento, pois a reta 𝜎 = 0 contém somente pontos finais das trajetóriasvindas de ambos os lados, estabelecendo assim uma trajetória especial sobre 𝜎 = 0. Este tipode movimento é denominado modo deslizante e suas soluções dependem somente do ganhoassociado à variável de estado 𝑥1. O movimento do sistema acontece em duas etapas, o modo deconvergência também denominado modo de aproximação (como mostra a figura 2.11), quando,a partir de qualquer ponto inicial, o estado do sistema é conduzido em direção à superfície dechaveamento (ou reta de chaveamento, como no exemplo) e alcança-a em tempo finito e, umavez que o estado atinge essa superfície, é conduzido sobre ela, diretamente para a origem doplano, esta condição é chamada de modo deslizante. Garantida a condição de convergência parao controle em modos deslizantes, a origem representa o estado de equilíbrio do sistema. Devidoao curso do modo deslizante, a trajetória do estado coincide com a reta de chaveamento 𝜎 = 0,sua equação pode ser interpretada como a equação do movimento, do tipo + 𝑐𝑥 = 0 (umaequação diferencial de primeira ordem), cuja solução é do tipo 𝑥1(𝑡) = 𝑥1(𝑡0)𝑒
−𝑐(𝑡−𝑡0):
0.5𝑥1 + 1 = 0. (2.68)
Esta solução é insensível à variação dos parâmetros da planta e a distúrbios não modela-dos. Esta propriedade é muito importante para esta abordagem, lhe conferindo robustez Utkinet al. (2009) denomina essa propriedade de invariância e é bastante interessante do ponto devista de projeto de controladores com realimentação, manifestando-se apenas durante a etapade modos deslizantes. A trajetória percorrida pelo estado do sistema a partir de um ponto inicialarbitrário pode ser vista na figura 2.12. Iniciando na região II, o sistema evolui e passa paraa região I e a seguir atinge a superfície de chaveamento, sendo então conduzido à origem doplano.
Figura 2.12: Plano de fase resultante da aplicação da função de chaveamento. Fonte: Hung et al.(1993), Azcue Puma et al. (2013).

56
2.2.3 SMC para sistemas de múltiplas entradas e saídas - MIMO
Nesta seção será apresentada uma abordagem clássica do controle por modos deslizantespara sistemas MIMO não lineares e sua robustez à incertezas nos seus parâmetros e à distúrbiosexternos apresentada por Benamor et al. (2011).
Considerando o sistema MIMO com 𝑝 entradas e 𝑚 saídas definido pela representação :⎧⎨⎩ x = 𝑓(𝑥, 𝑡) + 𝑔(𝑥, 𝑡)𝑢;
y = 𝑐(𝑥, 𝑡),(2.69)
com x como o vetor de estado 𝑛-dimensional x = [𝑥1, . . . ,𝑥𝑛]𝑇 e y o vetor 𝑚-dimensionaly = [𝑦1, . . . ,𝑦𝑚]𝑇 de saída, 𝑐𝑖(𝑥, 𝑡) os coeficientes das funções não lineares, 𝑓(𝑥, 𝑡) comoo vetor 𝑛-dimensional de coeficientes das funções não lineares 𝑓𝑖(𝑥, 𝑡), 𝑔(𝑥, 𝑡) sendo umamatriz (𝑛x𝑝) com coeficientes 𝑔𝑖𝑗(𝑥, 𝑡) e u o vetor 𝑝-dimensional de controle de coeficientes𝑢𝑖, u = [𝑢1, . . . ,𝑢𝑝]
𝑇 .Seja a superfície de deslizamento definida por:
s = [𝑠1, . . . ,𝑠𝑝]𝑇 , (2.70)
com:
𝑠𝑖 =
𝑟𝑖−1∑𝑘=0
𝜆(𝑖)𝑘 𝑒
(𝑘)𝑖 , para 𝑖 = 1, . . . ,𝑝, (2.71)
onde 𝑟𝑖 é o grau relativo do erro 𝑒𝑖𝜆(𝑖)𝑟𝑖−1 = 1 para 𝑘 = 1, . . . ,𝑟𝑖−2, 𝜆(𝑖)𝑘 são constantes escolhidas
de modo que 𝜆(𝑖)0 + 𝜆(𝑖)1 𝑝+ . . .+ 𝜆
(𝑖)𝑟𝑖−1𝑝
𝑟𝑖−1 seja um polinômio de Hurwitz (com parte real dasraízes negativa) e 𝑒(𝑘)𝑖 seja a 𝑘-ésima ordem derivativa do erro 𝑒𝑖.
𝑒𝑖 = 𝑦𝑖 − 𝑦𝑑𝑖 , para 𝑖 = 1, . . . ,𝑟𝑖 − 1, (2.72)
com 𝑦𝑑𝑖 como valor de saída desejado. A derivada de 𝑠𝑖 é:
𝑑𝑠𝑖𝑑𝑡
=
𝑟𝑖−1∑𝑘=0
𝜆(𝑖)𝑘
(𝜕𝑒𝑖𝜕𝑡
+𝑛∑𝑗=1
𝜕𝑒𝑖𝜕𝑥𝑗
𝑗
). (2.73)
Substituindo a 𝑗 da equação 2.69 e omitindo a representação da relação (𝑥, 𝑡) na equaçãoanterior temos:
𝑑𝑠𝑖𝑑𝑡
=
𝑟𝑖−1∑𝑘=0
𝜆(𝑖)𝑘
(𝜕𝑒𝑖𝜕𝑡
+𝑛∑𝑗=1
𝜕𝑒𝑖𝜕𝑥𝑗
𝑓𝑗 +
𝑝∑𝑙=1
𝑛∑𝑗=1
𝜕𝑒𝑖𝜕𝑥𝑗
𝑔𝑗𝑙𝑢𝑙
), (2.74)
57
que pode ser escrito como:
𝑑𝑠𝑖𝑑𝑡
= ℎ𝑖 + 𝑏𝑖1𝑢1 . . .+ 𝑏𝑖𝑃𝑢𝑃 = ℎ𝑖 +
𝑝∑𝑙=1
𝑏𝑖𝑙𝑢𝑙, (2.75)
com
ℎ𝑖 =
𝑟𝑖−1∑𝑘=0
𝜆(𝑖)𝑘
(𝜕𝑠𝑖𝜕𝑡
+𝑛∑𝑗=1
𝜕𝑠𝑖𝜕𝑥𝑗
𝑓𝑖
); (2.76)
𝑏𝑖𝑘 =
𝑟𝑖−1∑𝑘=0
𝜆(𝑖)𝑘
(𝑛∑𝑗=1
𝜕𝑠𝑖𝜕𝑥𝑗
𝑔𝑖𝑙
). (2.77)
Podemos escrever a equação da derivada do vetor de escorregamento como:
s = h + bu, (2.78)
com:
h =
⎡⎢⎢⎣ℎ1...ℎ𝑝
⎤⎥⎥⎦ e b =
⎡⎢⎢⎣𝑏11 . . . 𝑏1𝑝... . . . ...𝑏𝑝1 . . . 𝑏𝑝𝑝
⎤⎥⎥⎦ . (2.79)
A lei de controle para o controlador por modos deslizantes de primeira ordem (FOSMC)do sistema, cujas superfícies de deslizamento vão a zero em um tempo finito é definida pelaequação:
u = −b−1
⎛⎜⎜⎝h +
⎡⎢⎢⎣𝑘1𝑠𝑔𝑛(𝑠1)
...𝑘𝑝𝑠𝑔𝑛(𝑠𝑝)
⎤⎥⎥⎦⎞⎟⎟⎠ , (2.80)
sendo 𝑘𝑖 uma constante positiva e 𝑏 uma matriz inversível.Para verificação da estabilidade do sistema consideramos a seguinte função de Lyapunov:
𝑉 =1
2s𝑇 s =
1
2(𝑠1
2 + . . .+ 𝑠𝑝2), (2.81)
cuja derivada é: = 𝑠11 + . . .+ 𝑠𝑝𝑝 = s𝑇 s. (2.82)
Substituindo a equação 2.78, temos que:
= s𝑇 (h + bu). (2.83)
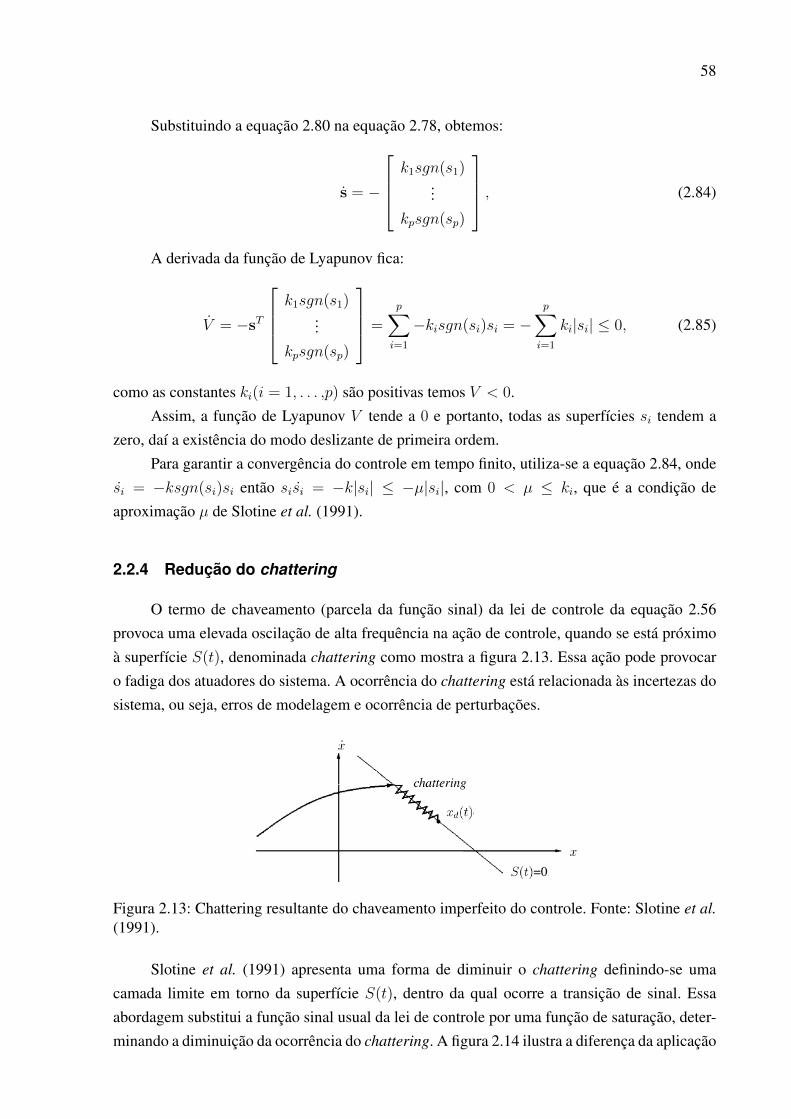
58
Substituindo a equação 2.80 na equação 2.78, obtemos:
s = −
⎡⎢⎢⎣𝑘1𝑠𝑔𝑛(𝑠1)
...𝑘𝑝𝑠𝑔𝑛(𝑠𝑝)
⎤⎥⎥⎦ , (2.84)
A derivada da função de Lyapunov fica:
= −s𝑇
⎡⎢⎢⎣𝑘1𝑠𝑔𝑛(𝑠1)
...𝑘𝑝𝑠𝑔𝑛(𝑠𝑝)
⎤⎥⎥⎦ =
𝑝∑𝑖=1
−𝑘𝑖𝑠𝑔𝑛(𝑠𝑖)𝑠𝑖 = −𝑝∑𝑖=1
𝑘𝑖|𝑠𝑖| ≤ 0, (2.85)
como as constantes 𝑘𝑖(𝑖 = 1, . . . ,𝑝) são positivas temos 𝑉 < 0.Assim, a função de Lyapunov 𝑉 tende a 0 e portanto, todas as superfícies 𝑠𝑖 tendem a
zero, daí a existência do modo deslizante de primeira ordem.Para garantir a convergência do controle em tempo finito, utiliza-se a equação 2.84, onde
𝑠𝑖 = −𝑘𝑠𝑔𝑛(𝑠𝑖)𝑠𝑖 então 𝑠𝑖𝑠𝑖 = −𝑘|𝑠𝑖| ≤ −𝜇|𝑠𝑖|, com 0 < 𝜇 ≤ 𝑘𝑖, que é a condição deaproximação 𝜇 de Slotine et al. (1991).
2.2.4 Redução do chattering
O termo de chaveamento (parcela da função sinal) da lei de controle da equação 2.56provoca uma elevada oscilação de alta frequência na ação de controle, quando se está próximoà superfície 𝑆(𝑡), denominada chattering como mostra a figura 2.13. Essa ação pode provocaro fadiga dos atuadores do sistema. A ocorrência do chattering está relacionada às incertezas dosistema, ou seja, erros de modelagem e ocorrência de perturbações.
Figura 2.13: Chattering resultante do chaveamento imperfeito do controle. Fonte: Slotine et al.(1991).
Slotine et al. (1991) apresenta uma forma de diminuir o chattering definindo-se umacamada limite em torno da superfície 𝑆(𝑡), dentro da qual ocorre a transição de sinal. Essaabordagem substitui a função sinal usual da lei de controle por uma função de saturação, deter-minando a diminuição da ocorrência do chattering. A figura 2.14 ilustra a diferença da aplicação
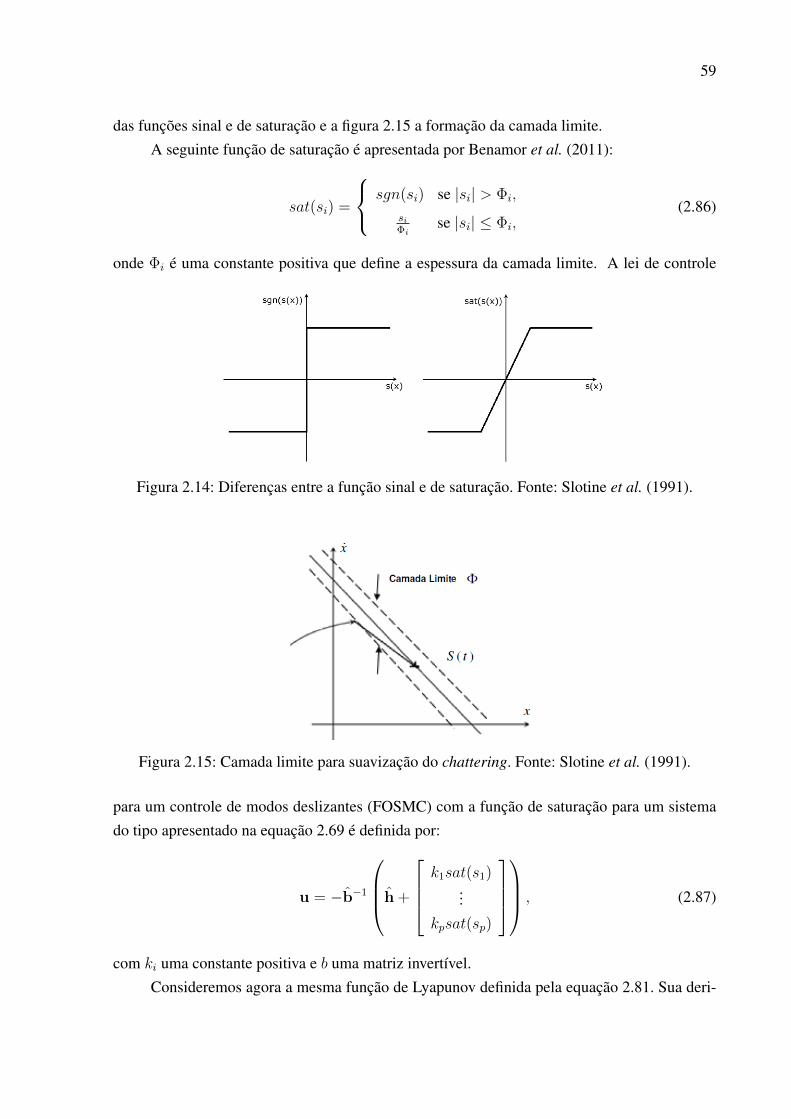
59
das funções sinal e de saturação e a figura 2.15 a formação da camada limite.A seguinte função de saturação é apresentada por Benamor et al. (2011):
𝑠𝑎𝑡(𝑠𝑖) =
⎧⎨⎩ 𝑠𝑔𝑛(𝑠𝑖) se |𝑠𝑖| > Φ𝑖,
𝑠𝑖Φ𝑖
se |𝑠𝑖| ≤ Φ𝑖,(2.86)
onde Φ𝑖 é uma constante positiva que define a espessura da camada limite. A lei de controle
Figura 2.14: Diferenças entre a função sinal e de saturação. Fonte: Slotine et al. (1991).
Figura 2.15: Camada limite para suavização do chattering. Fonte: Slotine et al. (1991).
para um controle de modos deslizantes (FOSMC) com a função de saturação para um sistemado tipo apresentado na equação 2.69 é definida por:
u = −b−1
⎛⎜⎜⎝h +
⎡⎢⎢⎣𝑘1𝑠𝑎𝑡(𝑠1)
...𝑘𝑝𝑠𝑎𝑡(𝑠𝑝)
⎤⎥⎥⎦⎞⎟⎟⎠ , (2.87)
com 𝑘𝑖 uma constante positiva e 𝑏 uma matriz invertível.Consideremos agora a mesma função de Lyapunov definida pela equação 2.81. Sua deri-
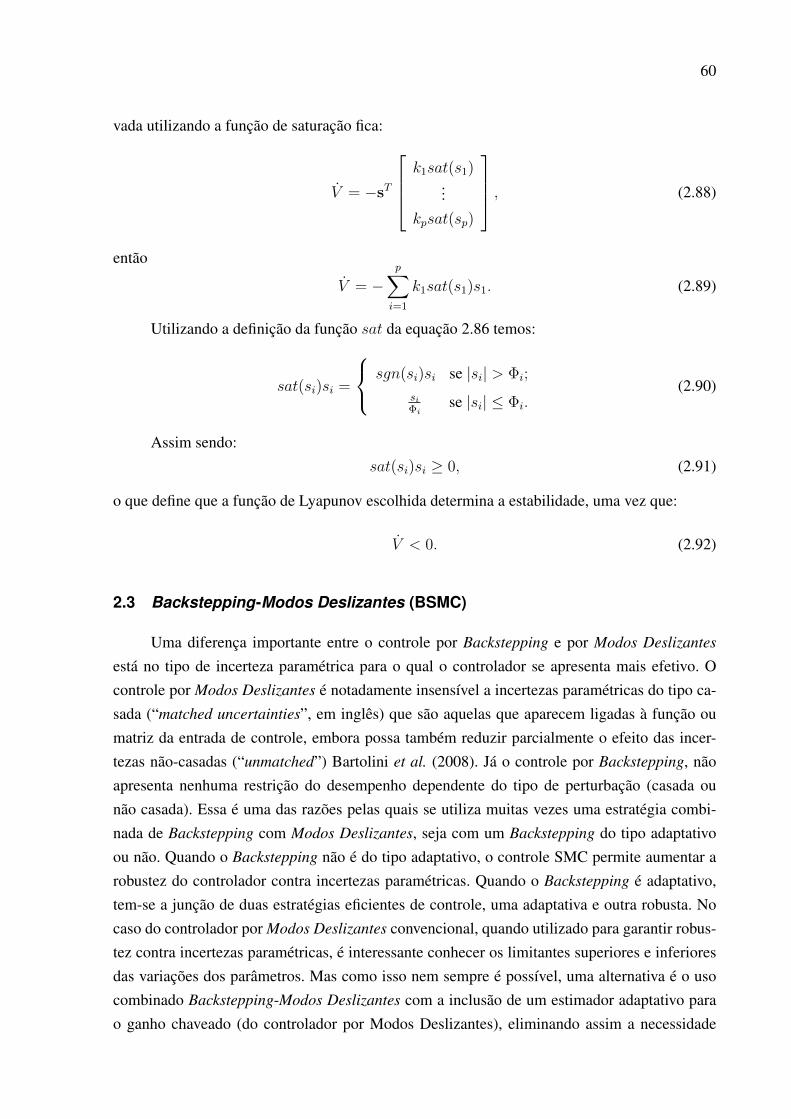
60
vada utilizando a função de saturação fica:
= −s𝑇
⎡⎢⎢⎣𝑘1𝑠𝑎𝑡(𝑠1)
...𝑘𝑝𝑠𝑎𝑡(𝑠𝑝)
⎤⎥⎥⎦ , (2.88)
então
= −𝑝∑𝑖=1
𝑘1𝑠𝑎𝑡(𝑠1)𝑠1. (2.89)
Utilizando a definição da função 𝑠𝑎𝑡 da equação 2.86 temos:
𝑠𝑎𝑡(𝑠𝑖)𝑠𝑖 =
⎧⎨⎩ 𝑠𝑔𝑛(𝑠𝑖)𝑠𝑖 se |𝑠𝑖| > Φ𝑖;
𝑠𝑖Φ𝑖
se |𝑠𝑖| ≤ Φ𝑖.(2.90)
Assim sendo:𝑠𝑎𝑡(𝑠𝑖)𝑠𝑖 ≥ 0, (2.91)
o que define que a função de Lyapunov escolhida determina a estabilidade, uma vez que:
< 0. (2.92)
2.3 Backstepping-Modos Deslizantes (BSMC)
Uma diferença importante entre o controle por Backstepping e por Modos Deslizantes
está no tipo de incerteza paramétrica para o qual o controlador se apresenta mais efetivo. Ocontrole por Modos Deslizantes é notadamente insensível a incertezas paramétricas do tipo ca-sada (“matched uncertainties”, em inglês) que são aquelas que aparecem ligadas à função oumatriz da entrada de controle, embora possa também reduzir parcialmente o efeito das incer-tezas não-casadas (“unmatched”) Bartolini et al. (2008). Já o controle por Backstepping, nãoapresenta nenhuma restrição do desempenho dependente do tipo de perturbação (casada ounão casada). Essa é uma das razões pelas quais se utiliza muitas vezes uma estratégia combi-nada de Backstepping com Modos Deslizantes, seja com um Backstepping do tipo adaptativoou não. Quando o Backstepping não é do tipo adaptativo, o controle SMC permite aumentar arobustez do controlador contra incertezas paramétricas. Quando o Backstepping é adaptativo,tem-se a junção de duas estratégias eficientes de controle, uma adaptativa e outra robusta. Nocaso do controlador por Modos Deslizantes convencional, quando utilizado para garantir robus-tez contra incertezas paramétricas, é interessante conhecer os limitantes superiores e inferioresdas variações dos parâmetros. Mas como isso nem sempre é possível, uma alternativa é o usocombinado Backstepping-Modos Deslizantes com a inclusão de um estimador adaptativo parao ganho chaveado (do controlador por Modos Deslizantes), eliminando assim a necessidade
61
de se conhecer os limitantes das incertezas. Outra vantagem de utilizar a estratégia combinadaBSMC é associar a facilidade da metodologia de projeto da lei de controle por Backstepping esua função de Lyapunov com a incorporação do termo de chaveamento do Modos Deslizantes
que acrescenta mais robustez ao sistema global. Aparentemente, um dos primeiros artigos com-binando as duas abordagens data de 1993 Sira-Ramirez e Llanes-Santiago (1993). Desde então,vários trabalhos em BSMC têm sido publicados, e com maior ênfase nos últimos quinze anos,principalmente voltados a aplicações em veículos aéreos como: Koshkouei e Zinober (2000),Chingozha e Nyandoro (2014), Chen e Lu (2014) e Bouadi et al. (2007). No artigo de Chene Lu (2014), o autor utiliza uma abordagem BSMC para o controle de posicionamento e ve-locidade de um motor síncrono tipo brushless e compara os resultados com um controladorBackstepping puro e com um controlador preditivo do tipo MPC. Os resultados experimentaismostraram uma enorme vantagem do BSMC em relação ao BS e ao MPC, tanto no desem-penho de tracking de velocidade e posição (mais rápido e bem amortecido) quanto no errode regime permanente, mesmo diante de perturbações e incertezas no modelo. É interessanteperceber que a metodologia para a derivação da função de Lyapunov asociada aos projetos deBS, SMC e BSMC é muito parecida, o que muitas vezes leva a algumas confusões ou errosde projeto em trabalhos científicos. O projeto de controle BSMC de Bouadi et al. (2007) paraum quadrotor, por exemplo, é na verdade um projeto de SMC pois utiliza apenas o segundopasso da metodologia de Backstepping no desenvolvimento da função de Lyapunov. Em outrotrabalho recente, Espinoza et al. (2014), realiza uma comparação exaustiva entre os diversostipos de controladores Backstepping, Modos Deslizantes de primeira e de segunda ordem e aversão combinada Backstepping-Modos Deslizantes para o controle de um VANT de asa fixa.Os controladores desenvolvidos são todos do tipo SISO desacoplados, para altitude, guinada erolagem, cada um separadamente. Nesse trabalho, os autores concluíram, a partir dos resultadosde simulação somente, que os controladores BS e SMC apresentaram bom desempenho quandoutilizados isoladamente, mas que o Backstepping apresentou sinais de controle muito elevados(altos torques e forças), enquanto que o Modos Deslizantes apresentou o conhecido problemado chattering ou oscilação no sinal de controle. Quando usado de forma combinada (BSMC), ocontrolador obtido apresentou uma redução nos picos dos sinais de controle (forças e torques) euma diminuição do problema do chattering. Entretanto, há trabalhos que não relatam a diminui-ção do chattering do Modos Deslizantes devido ao uso combinado com o Backstepping, comoBasri et al. (2014), onde um BSMC é desenvolvido para o controle de atitude e seguimento detrajetória de um quadrotor. Os autores incluem um controlador Fuzzy na saída do controladorpara poder reduzir o chattering observado no BSMC . Assim, os poucos artigos onde são estu-dados comparativamente as 3 abordagens BS, SMC e BSMC o fazem na forma de comparaçãode resultados para uma dada aplicação, geralmente de veículos aéreos não tripulados, e nãotemos conhecimento de nenhum trabalho que o faça de forma analítica e sistemática como notrabalho dessa tese.
62
3 MODELO DO DIRIGÍVEL
O objetivo deste capítulo é apresentar a modelagem cinemática e dinâmica do dirigívelAURORA. A principal característica do modelo apresentado é o comportamento não linear quevaria conforme o seu modo de operação. Este capítulo está baseado no relatório de De Paiva eAzinheira (2001).
O dirigível é essencialmente um veículo de baixa velocidade e a exigência principal deseu envelope é a de possuir uma forma aerodinâmica para reduzir a resistência com o ar e serrígido o suficiente para ser capaz de sustentar os seus propulsores e suportar cargas impostas porforças aerodinâmicas. O modelo deste veículo aéreo difere do usual de uma aeronave porque éum veículo mais leve do que o ar e ao se movimentar, desloca um volume muito grande de arà sua volta, cuja massa é significativa quando comparada à sua própria massa. Deste modo, aocontrário do que acontece com os aviões, as propriedades dessa massa de ar e sua inércia devemser consideradas, sendo tratadas como massas virtuais e adicionadas à massa e inércia devidoapenas à estrutura do dirigível.
O movimento do dirigível tem como referência um sistema de eixos ortogonais fixos naaeronave, que tem sua origem coincidente com o seu centro de flutuação. Nas próximas se-ções serão apresentadas as equações do modelo do dirigível. Na seção 3.1 são apresentadosos atuadores que geram forças para controlar o dirigível, são apresentadas suas capacidades elimitações. Na seção 3.2, é descrito o modelo dinâmico sem forças aerodinâmicas, isto é, quaissão as forças atuantes no modelo caso não sejam consideradas as forças geradas devido à açãodo movimento relativo do ar em relação ao movimento do dirigível. Na seção 3.3 o modelo écompleto, incluindo forças aerodinâmicas que incluem os esforços que favorecem alguns mo-vimentos do dirigível devido ao posicionamento angular do mesmo em relação à direção domovimento relativo do ar. A seção 3.4 descreve o modelo cinemático com seis graus de liber-dade, com as transformações entre os sistemas de coordenadas utilizados. A seção 3.5 descrevecomo são definidos os tipos de erros utilizados para alimentar o controlador nos testes do diri-gível, podendo ser de posição para voo pairado, de rastreamento de trajetória e de rastreamentode velocidade para o voo aerodinâmico.
Para tornar possível o cumprimento de uma missão de voo, o projeto da lei de controlepara o dirigível autônomo precisa ser robusto diante de perturbações como a presença do vento.A limitação de forças geradas pelos atuadores e a característica do dirigível ser subatuado,devem ser levadas em consideração no projeto do controlador. Além destas observações é im-portante lembrar que as forças para controlar o dirigível são geradas pelos atuadores que temuma dinâmica que deve ser respeitada para poder “transformar” os sinais de controle nas forçasrequeridas. Portanto, a lei de controle deve ser projetada para superar dificuldades devido asseguintes questões: (i) o dirigível é um veículo subatuado, seu movimento lateral depende deatuadores suscetíveis às condições de operação e seu comportamento varia em função da inci-dência do vento, tal como descrito na seção 3.1; (ii) os atuadores do dirigível não são utilizáveis
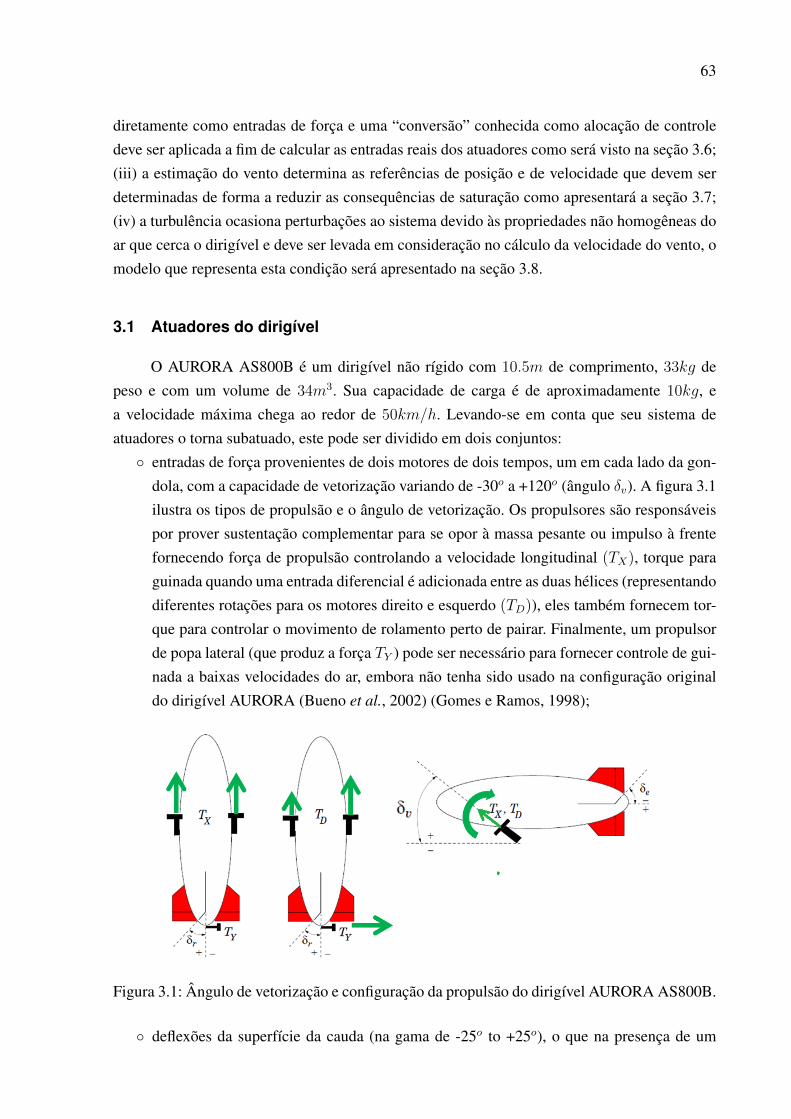
63
diretamente como entradas de força e uma “conversão” conhecida como alocação de controledeve ser aplicada a fim de calcular as entradas reais dos atuadores como será visto na seção 3.6;(iii) a estimação do vento determina as referências de posição e de velocidade que devem serdeterminadas de forma a reduzir as consequências de saturação como apresentará a seção 3.7;(iv) a turbulência ocasiona perturbações ao sistema devido às propriedades não homogêneas doar que cerca o dirigível e deve ser levada em consideração no cálculo da velocidade do vento, omodelo que representa esta condição será apresentado na seção 3.8.
3.1 Atuadores do dirigível
O AURORA AS800B é um dirigível não rígido com 10.5𝑚 de comprimento, 33𝑘𝑔 depeso e com um volume de 34𝑚3. Sua capacidade de carga é de aproximadamente 10𝑘𝑔, ea velocidade máxima chega ao redor de 50𝑘𝑚/ℎ. Levando-se em conta que seu sistema deatuadores o torna subatuado, este pode ser dividido em dois conjuntos:
∘ entradas de força provenientes de dois motores de dois tempos, um em cada lado da gon-dola, com a capacidade de vetorização variando de -30𝑜 a +120𝑜 (ângulo 𝛿𝑣). A figura 3.1ilustra os tipos de propulsão e o ângulo de vetorização. Os propulsores são responsáveispor prover sustentação complementar para se opor à massa pesante ou impulso à frentefornecendo força de propulsão controlando a velocidade longitudinal (𝑇𝑋), torque paraguinada quando uma entrada diferencial é adicionada entre as duas hélices (representandodiferentes rotações para os motores direito e esquerdo (𝑇𝐷)), eles também fornecem tor-que para controlar o movimento de rolamento perto de pairar. Finalmente, um propulsorde popa lateral (que produz a força 𝑇𝑌 ) pode ser necessário para fornecer controle de gui-nada a baixas velocidades do ar, embora não tenha sido usado na configuração originaldo dirigível AURORA (Bueno et al., 2002) (Gomes e Ramos, 1998);
Figura 3.1: Ângulo de vetorização e configuração da propulsão do dirigível AURORA AS800B.
∘ deflexões da superfície da cauda (na gama de -25𝑜 to +25𝑜), o que na presença de um
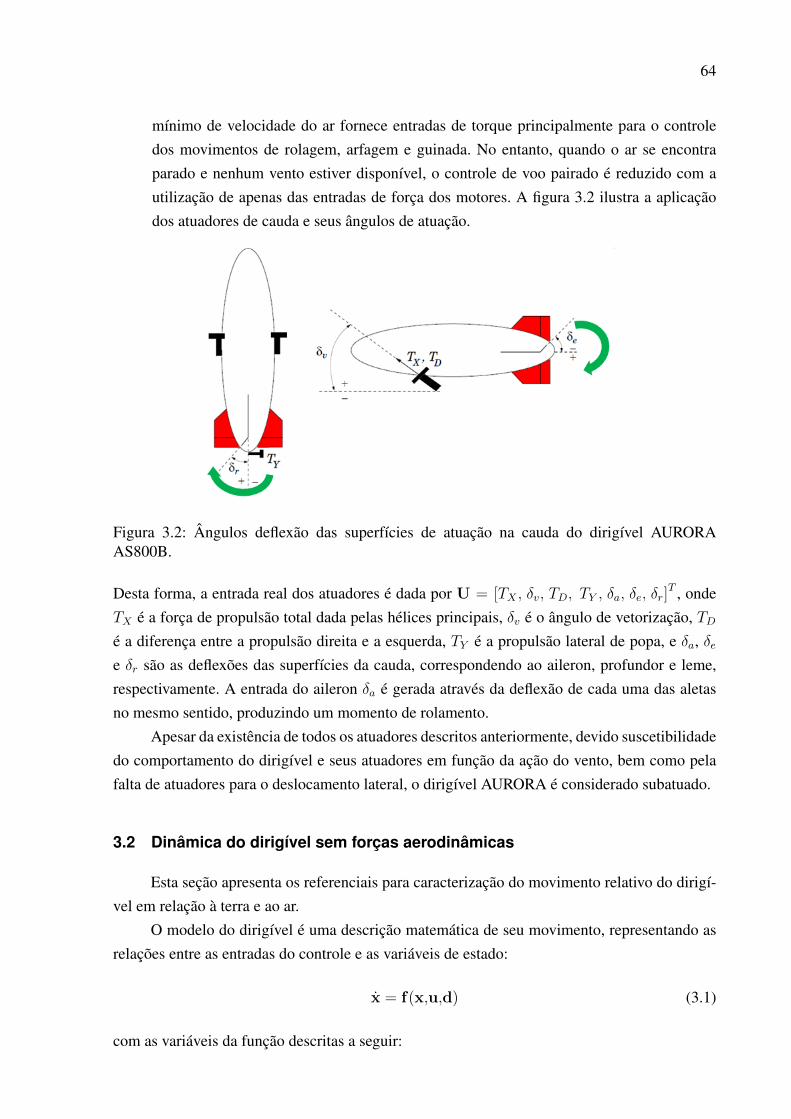
64
mínimo de velocidade do ar fornece entradas de torque principalmente para o controledos movimentos de rolagem, arfagem e guinada. No entanto, quando o ar se encontraparado e nenhum vento estiver disponível, o controle de voo pairado é reduzido com autilização de apenas das entradas de força dos motores. A figura 3.2 ilustra a aplicaçãodos atuadores de cauda e seus ângulos de atuação.
Figura 3.2: Ângulos deflexão das superfícies de atuação na cauda do dirigível AURORAAS800B.
Desta forma, a entrada real dos atuadores é dada por U = [𝑇𝑋 , 𝛿𝑣, 𝑇𝐷, 𝑇𝑌 , 𝛿𝑎, 𝛿𝑒, 𝛿𝑟]𝑇 , onde
𝑇𝑋 é a força de propulsão total dada pelas hélices principais, 𝛿𝑣 é o ângulo de vetorização, 𝑇𝐷é a diferença entre a propulsão direita e a esquerda, 𝑇𝑌 é a propulsão lateral de popa, e 𝛿𝑎, 𝛿𝑒e 𝛿𝑟 são as deflexões das superfícies da cauda, correspondendo ao aileron, profundor e leme,respectivamente. A entrada do aileron 𝛿𝑎 é gerada através da deflexão de cada uma das aletasno mesmo sentido, produzindo um momento de rolamento.
Apesar da existência de todos os atuadores descritos anteriormente, devido suscetibilidadedo comportamento do dirigível e seus atuadores em função da ação do vento, bem como pelafalta de atuadores para o deslocamento lateral, o dirigível AURORA é considerado subatuado.
3.2 Dinâmica do dirigível sem forças aerodinâmicas
Esta seção apresenta os referenciais para caracterização do movimento relativo do dirigí-vel em relação à terra e ao ar.
O modelo do dirigível é uma descrição matemática de seu movimento, representando asrelações entre as entradas do controle e as variáveis de estado:
x = f(x,u,d) (3.1)
com as variáveis da função descritas a seguir:
65
∘ O estado x = [v𝑇 , 𝜔𝑇 , p𝑇 , Φ𝑇 ]𝑇 ∈ R12 inclui as velocidades inerciais lineares v =
[𝑢, 𝑣, 𝑤]𝑇 e angulares 𝜔 = [𝑝, 𝑞, 𝑟]𝑇 expressas no sistema “l” fixo no dirigível (videFigura 3.3), a posição cartesiana p = [𝑝𝑁 , 𝑝𝐸, 𝑝𝐷]𝑇 de seu centro de volume no sistemainercial i, e a atitude angular do dirigível Φ = [𝜑, 𝜃, 𝜓]𝑇 dada pelos ângulos de Euler;
∘ O vetor de entrada u = [𝛿𝑒, 𝑇𝐿, 𝑇𝑅, 𝛿𝑣, 𝛿𝑎, 𝛿𝑟, 𝑇𝑌 ]𝑇 ∈ R7 inclui a deflexão do ele-vador 𝛿𝑒, a propulsão dos motores esquerda e direita 𝑇𝐿, 𝑇𝑅, o ângulo de vetorizaçãodos motores 𝛿𝑣, a deflexão do aileron 𝛿𝑎, a deflexão do leme 𝛿𝑟 e a propulsão lateral 𝑇𝑌(uma vez que não o dirigível AURORA não possua este propulsor, não será utilizado pelocontrolador);
∘ O vetor de distúrbio d ∈ R6 inclui a entrada do vento (Velocidade do vento) expressano sistema i com um termo constante e um vetor de seis componentes modelando a tur-bulência atmosférica (vento não constante). O vetor de turbulência é representado pelavelocidade linear p𝑤 = [𝑁𝑤 , 𝐸𝑤 , 𝐷𝑤 ]𝑇 e a velocidade angular, que no caso é conside-rada constante com 𝜔𝑤 = [0, 0, 0]𝑇 .
Para estabelecer um modelo matemático aceitável do voo do dirigível, as seguintes consi-derações devem ser levadas em conta (Azinheira et al., 2002):
1. O dirigível desloca um grande volume de ar e sua massa virtual (adicionada) e sua inérciatornam-se significativas, isto é, o veículo mais leve que o ar se comporta como se tivessemassa e momentos de inércia substancialmente maiores que os indicados pelos métodosfísicos condicionais;
2. Três tipos de matrizes de massa e inércia devem ser considerados: massa e inércia (𝑚 ∈R, J ∈ R3×3) do próprio veículo; a massa e inércia (𝑚𝐵 ∈ R, J𝐵 ∈ R3×3) do ar flutuante,correspondendo ao ar deslocado pelo volume total do dirígivel; e a massa e inércia virtual(M𝑣 ∈ R3×3, J𝑣 ∈ R3×3), que pode ser vista como a massa de ar ao redor do dirigível edeslocada com o movimento relativo do dirigível no ar;
3. A massa do dirigível muda em voo devido ao inflamento ou desinflamento dos balonetes.Entretanto, as mudanças devido ao consumo de combustível são ignoradas;
4. O dirigível é assumido como um corpo rígido, e os efeitos aeroelásticos são negligencia-dos.
A figura 3.3 apresenta os sistemas de coordenadas utilizados no estudo do movimento dodirigível. Nesta figura apresenta-se o referencial inercial, representado por 𝑖 (sistema de coor-denadas coincidente com a direção geográfica Norte, Leste e para baixo), denominado (NED),o referencial fixo no corpo 𝑙 ou (ABC) e o referencial do vento ou aerodinâmico 𝑎. O refe-rencial 𝑎 representa a direção do movimento do dirigível. Para definir esta direção utiliza-se oângulo de ataque 𝛼, formado no plano vertical entre a direção do deslocamento do dirigível coma direção longitudinal do referencial ABC e o ângulo de escorregamento lateral 𝛽, formado noplano horizontal entre a direção movimento do dirigível e a direção longitudinal do referencial

66
ABC.
Figura 3.3: Sistemas de referência: inercial 𝑖 = O, 𝑥𝑖, 𝑦𝑖, 𝑧𝑖, fixo no CV (centro de volume)do dirigível 𝑙 = CV, 𝑥𝑙, 𝑦𝑙, 𝑧𝑙 e do vento ou aerodinâmico 𝑎 (Azinheira et al., 2008)
Com as definições dos referenciais das entradas de controle e das variáveis de estado,atribui-se a equação dinâmica deduzida em Azinheira et al. (2002), utilizando a formulação dasegunda lei de Newton expressa no sistema local l:
MV = F𝑘 + F𝑤 + F𝑔 + F𝑝 (3.2)
com M ∈ R6×6 representando a matriz de massa e inércia generalizada, com a velocidadeinercial no sistema local V = [v𝑇 ,𝜔𝑇 ]𝑇 ∈ R6 composta pelas velocidades linear v ∈ R3 eangular 𝜔 ∈ R3 no sistema local e do lado direito da equação as forças generalizadas repre-sentadas pelas matrizes de forças F𝑘 cinéticas, F𝑤 induzidas do vento, F𝑔 gravitacionais e F𝑝
propulsoras.A dinâmica original do dirigível sem as forças aerodinâmicas segundo Azinheira et al.
(2002), podem também ser representadas pelas equações a seguir, considerando os atuadorescomo entradas de força e torque f = (F𝑢,T𝑢), isto é:
M𝑎v −𝑚C3 = 𝑚Ω3C3𝜔 −Ω3M𝑎v +𝑚𝑤Sg + F𝑢
𝑚C3v + J𝑎 = −Ω3J𝑎𝜔 −𝑚Ω3C3v +𝑚C3Sg + T𝑢
(3.3)
com 𝑚 massa do dirigível, 𝑚𝑤 sua massa pesante, que é a diferença entre 𝑚 e a massa flutuante𝑚𝑏, M𝑎 = 𝑚I + M𝑣, e J𝑎 = J − 𝑚C2
3 + J𝑣 como matrizes de massa e inércia aparentes

67
respectivamente, com a notação da matriz sintética usada pelo produto vetorial1
C3 = c×Ω3 = 𝜔×
(3.4)
utilizando C3 ∈ R3×3,Ω3 ∈ R3×3 e c ∈ R3 para representar as coordenadas do c.g. no sistemalocal, com S ∈ S𝑂(3) := S ∈ R3×3 : SS𝑇 = 𝐼, det(S) = +1 a matriz de rotação a partirdo sistema de coordenadas inercial 𝑖 para o sistema de coordenadas local 𝑙 e com g comovetor da gravidade no sistema inercial.
Manipulando as equações (3.3) e (3.4) temos:[M𝑎 −𝑚C3
𝑚C3 J𝑎
][v
]= −
[Ω3M𝑎 −𝑚Ω3C3
𝑚Ω3C3 Ω3J𝑎
][v
𝜔
]+
[𝑚𝑤Sg
𝑚C3Sg
]+ F𝑝 (3.5)
ou[M𝑎 −𝑚C3
𝑚C3 J𝑎
][v
]= −
[Ω3 0
0 Ω3
][M𝑎 −𝑚C3
𝑚C3 J𝑎
][v
𝜔
]+
[𝑚𝑤I3
𝑚C3
]Sg+F𝑝
(3.6)ou finalmente
MV = −Ω6MV + E𝑔Sg + F𝑝, (3.7)
com E𝑔=
[𝑚𝑤I3
𝑚C3
], com as matrizes x como estado de velocidade, f como a entrada de
força, e M como a matriz de inércia simétrica, todas as três de dimensão 6 e com Ω6=
diagΩ3,Ω3 ∈ R6×6.
3.3 Dinâmica do dirigível
A inclusão das forças aerodinâmicas ao modelo dinâmico pode ser realizada, retomandoa equação (3.2) e considerando-se agora a parcela F𝑎. Esta parcela representa as forças desustentação ocasionadas pela ação do movimento relativo do ar sobre a superfície do envelopedo dirigível. Estas forças exercem influência sobre a demanda de atividade dos atuadores parao controle do dirigível. Deste modo a equação (3.2) torna-se:
MV = F𝑘 + F𝑤 + F𝑔 + F𝑝 + F𝑎. (3.8)
Se assumirmos que o vento é constante no sistema inercial terrestre, com a velocidade
1Para a obtenção dos valores de C3 e Ω3 utiliza-se o produto da matriz antissimétrica definido para um vetor
genérico por a× =
⎡⎣ 0 −𝑎𝑧 𝑎𝑦𝑎𝑧 0 −𝑎𝑥−𝑎𝑦 𝑎𝑥 0
⎤⎦.
68
inercial linear p𝑤 e sem componentes angulares, a velocidade local v pode ser escrita como asoma da velocidade relativa do ar incidindo sobre o dirigível v𝑎, com a velocidade do vento nosistema local v𝑤, ou seja:
v = v𝑎 + v𝑤 = v𝑎 + Sp𝑤. (3.9)
Definindo o estado velocidade do ar como x = [v𝑇𝑎 ,𝜔𝑇 ]𝑇 ∈ R6, a equação 3.7 da dinâ-
mica do dirigível pode ser reescrita de forma compacta como uma função da velocidade do ar(Thomasson, 2000)
Mx = MKx + E𝑔Sg + F𝑝 + F𝑎 (3.10)
x = Kx + M−1 (E𝑔Sg + F𝑝 + F𝑎) (3.11)
com K= −M−1Ω6M ∈ R6×6 linearmente dependente da velocidade angular 𝜔, enquanto
que M é constante ou varia muito lentamente com a altitude (desde que os termos da inérciadependam da densidade do ar).
3.4 Modelo cinemático com quatérnions
O modelo do dirigível pode ser descrito por seu movimento em relação ao sistema decoordenadas inercial. Nesta seção obtém-se através da variação de sua posição, as equações quedescrevem seu movimento.
Define-se então o vetor de posicionamento do dirigível 𝜂 = [p𝑇 ,q𝑇 ]𝑇 ∈ R7 como com-posto por coordenadas Cartesianas p ∈ R3 no sistema NED, fixo na Terra, e a atitude angulardescrita de quatérnions q ∈ R4 (Stevens e Lewis, 1992).
As equações da cinemática relacionam as velocidades angulares e permitem atualizara atitude de um corpo rígido em relação ao tempo. As soluções obtidas são os ângulos querepresentam a atitude do corpo e as suas derivadas temporais. Para a representação através dosângulos de Euler, a equação da cinemática é dada por:⎡⎢⎣
𝜃
⎤⎥⎦ = 1/cos 𝜃
⎡⎢⎣ cos 𝜃 sin𝜑 sin 𝜃 cos𝜑 sin 𝜃
0 cos𝜓 cos 𝜃 − sin𝜑 cos 𝜃
0 sin𝜑 cos𝜑
⎤⎥⎦⎡⎢⎣ 𝑤𝑥
𝑤𝑦
𝑤𝑧
⎤⎥⎦ (3.12)
onde , 𝜃 e representam a taxa de variação temporal dos ângulos de Euler e 𝑤𝑥, 𝑤𝑦 e 𝑤𝑧 sãocomponentes do vetor 𝜔 que representa a velocidade angular no sistema de referência fixadono corpo. Observa-se para este equacionamento a existência de uma singularidades para valoresde 𝜃 = 𝜋/2 + 𝑛𝜋, para 𝑛 ∈ Z. Portanto, só é adequado para descrever veículos que não reali-zam operações verticais ou manobra invertidas, tais como veículos terrestres, barcos e navios eAeronaves de transporte.
No modelo do dirigível adota-se para representar rotações, uma forma alternativa a des-crita na equação 3.12, utilizam-se os quatérnions unitários. Segundo Santos et al. (2003) a
69
representação da orientação através de quatérnions é particularmente adequada ao tratamentocomputacional em sistemas de tempo real. Sua representação é reduzida, não induz a singulari-dades, é de simples manipulação (dispensa o uso de funções trigonométricas) e possui estreitarelação com o uso de giroscópios.
As equações da cinemática utilizando-se quatérnions em função dos ângulos de Euler são:
𝑞 = (cos𝜑
2+ 𝑖 sin
𝜑
2)(cos
𝜃
2+ 𝑗 sin
𝜃
2)(cos
𝜓
2+ 𝑘 sin
𝜓
2) (3.13)
ou ⎡⎢⎢⎢⎢⎣𝑞0
𝑞1
𝑞2
𝑞3
⎤⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎣cos 𝜑
2cos 𝜃
2cos 𝜓
2+ sin 𝜑
2sin 𝜃
2sin 𝜓
2
cos 𝜃2
cos 𝜓2
sin 𝜑2− cos 𝜑
2sin 𝜃
2sin 𝜓
2
cos 𝜑2
cos 𝜓2
sin 𝜃2
+ sin 𝜑2
cos 𝜃2
sin 𝜓2
cos 𝜑2
cos 𝜃2
sin 𝜓2− sin 𝜑
2cos 𝜓
2sin 𝜃
2
⎤⎥⎥⎥⎥⎦ (3.14)
que representam a atitude do dirigível em função dos ângulos de Euler.As equações a seguir descrevem as relações entre a posição do dirigível e a sua velocidade:⎧⎪⎨⎪⎩
p = S𝑇v
q = 12Q
[0
𝜔
],
(3.15)
com Q ∈ R4×4, como matriz unitária que relaciona os quatérnions com suas derivadas e suastaxas de variação angulares, sendo que⎡⎢⎢⎢⎢⎣
𝑞0
𝑞1
𝑞2
𝑞3
⎤⎥⎥⎥⎥⎦ = 1/2
⎡⎢⎢⎢⎢⎣𝑞0 −𝑞1 −𝑞2 −𝑞3𝑞1 𝑞0 −𝑞3 −𝑞2𝑞2 𝑞3 𝑞0 −𝑞1𝑞3 −𝑞2 𝑞1 𝑞0
⎤⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎣
0
𝑤𝑥
𝑤𝑦
𝑤𝑧
⎤⎥⎥⎥⎥⎦ . (3.16)
A derivada da posição está relacionada à velocidade relativa do dirigível, que é dada por:
=
[p
q
]=
[S𝑇 03×4
04×312Q
]CV =
[S𝑇 03×4
04×312Q
]C
[v𝑎 + Sp𝑤
𝜔
](3.17)
=
[S𝑇 03×4
04×312Q
]Cx +
[I3
04×3
]p𝑤. (3.18)
finalmente, a equação pode ser reescrita como:
= DCx + Bp𝑤 (3.19)
= Tx + Bp𝑤 (3.20)

70
onde B =
[I3
04×3
]∈ R7×4, C ,
⎡⎢⎣ I3 03
01,3 01,3
03 I3
⎤⎥⎦ ∈ R7×6, D ,
[S𝑇 03×4
04×312Q
]∈ R7×7, e
T ∈ R7×6 é definido como T= DC.
O cálculo da aceleração do sistema parte da condição da velocidade do vento, consideradaconstante, p𝑤 = 0, deste modo tem-se
= Tx + Tx = Tx + DCx. (3.21)
As derivadas das matrizes em D são:
S = −Ω3S, (3.22)
S𝑇 = S𝑇Ω3 (3.23)
eQ =
1
2QΩ4, (3.24)
onde Ω4 é a matriz antissimétrica associada pela velocidade angular 𝜔 = [𝜔1, 𝜔2, 𝜔3]𝑇 :
Ω4 =
⎡⎢⎢⎢⎢⎣0 −𝜔1 −𝜔2 −𝜔3
𝜔1 0 −𝜔3 𝜔2
𝜔2 𝜔3 0 −𝜔1
𝜔3 −𝜔2 𝜔1 0
⎤⎥⎥⎥⎥⎦ . (3.25)
Definindo Ω7 ,
[Ω3 03×4
04×312Ω4
], a derivada de D pode ser escrita como:
D =
[S𝑇Ω3 03×4
04×314QΩ4
]=
[S𝑇 03×4
04×312Q
][Ω3 03×4
04×312Ω4
]= DΩ7. (3.26)
Assim a equação da aceleração 3.21 pode ser atualizada para:
= Tx + DΩ7Cx. (3.27)
A matriz de quatérnions Q é unitária ( Q𝑇Q = I), resultando em outra propriedade damatriz T:
T𝑇T = C𝑇
[S𝑇 03×4
04×312Q
]𝑇 [S𝑇 03×4
04×312Q
]C = C𝑇
[SS𝑇 03×4
04×314Q𝑇Q
]C =
[I3 03×4
04×314I3
].
(3.28)

71
Finalmente, se definirmos as matrizes diagonais
Δ =
[I3 03
0312I3
]=(T𝑇T
)1/2(3.29)
e
Δ7 =
[I3 03×4
04×312I4
]=(D𝑇D
)1/2(3.30)
então obtemosT𝑇Δ−2
7 T = Δ−2T𝑇T = I6 (3.31)
levando a duas possibilidades de formulações para a pseudo inversa esquerda de T:
T+ = T𝑇Δ−27 = Δ−2T𝑇 . (3.32)
3.5 Erros de posição para voo pairado, rastreamento de trajetória e rastrea-mento de velocidade.
Dependendo do objetivo da missão de voo, os erros entre a situação de referência e asituação real do sistema devem ser especificados de maneiras diferentes. Os seus valores sãoutilizados pelo controlador para determinar a atividade dos atuadores. Essas referências podemser de posição ou velocidade.
Vamos definir 𝜂𝑟 = [p𝑇𝑟 ,q𝑇𝑟 ]𝑇 ∈ R7 como a referência de posição do dirigível, x𝑟 =
[v𝑇𝑟 ,0]𝑇 ∈ R6 como a velocidade de referência em relação à Terra, e 𝜂𝑒 = (𝜂 − 𝜂𝑟) ∈ R7 comoo erro de posição definido como a diferença entre a posição de referência e a posição real dodirigível. Três situações diferentes são possíveis numa missão de voo, são elas:
1. Posicionamento - onde o objetivo é manter o dirigível sobre um alvo fixo na Terra,quando a posição e a orientação são constantes, ou 𝜂𝑟 = 𝑐𝑡𝑒, e portanto 𝑟 = 0 destemodo temos 𝜂𝑒 = (𝜂 − 𝜂𝑟) e 𝑒 = .
2. Rastreamento de trajetória - onde o objetivo é seguir uma dada trajetória no sistemaNED, e neste caso o vetor de referência de posição do dirigível poderia conter o perfilda trajetória, sendo função do tempo, ou 𝜂𝑟(𝑡), do mesmo modo 𝜂𝑒 = (𝜂 − 𝜂𝑟) e 𝑒 =
− 𝜂𝑟.3. Rastreamento de velocidade - quando a velocidade em relação à Terra é constante v𝑟
deve ser rastreada para ser seguida com uma inclinação apropriada e constante ao longode uma trajetória retilínea. Neste caso temos 𝜂𝑒 = (𝜂 − 𝜂𝑟) e 𝑒 = − 𝜂𝑟, com
𝑟 =
[S𝑇𝑟 v𝑟
0
]= T𝑟x𝑟 (3.33)
72
sendo S𝑟 ∈ R3×3 e v𝑟 ∈ R3 constantes então temos: x𝑟 =
[v𝑟
0
]∈ R6 e
T𝑟 =
[S𝑇𝑟
0
]∈ R7×6.
Portanto consideramos a referência da trajetória retilínea, a aproximação pode tambémser aplicada para casos onde a referência da trajetória varia lentamente, com variaçõesinsignificantes quando comparadas com a variação do estado.
Em complementação, temos em função das derivadas de primeira e segunda ordem doerro de posição:
𝑒 = − 𝑟 = Tx + Bp𝑤 −T𝑟x𝑟, (3.34)
𝑒 = − 𝑟, (3.35)
considerando a velocidade de referência constante: 𝑟 = 0, deste modo temos:
𝑒 = = Tx + Tx = Tx + DCx (3.36)
𝑒 = = Tx + DΩ7Cx. (3.37)
3.6 Alocação de controle
As forças longitudinais e verticais e torques necessários para controlar o dirigível para ocumprimento de missões de voo desejadas, são obtidas indiretamente através das entradas decontrole do dirigível, ou seja, através da ação dos atuadores. A alocação de controle é a conver-são dessas forças e torques para os respectivos sinais dos atuadores que as produzem. Antes deapresentar a solução proposta para o problema de alocação de controle, é importante observaralgumas características da dinâmica do dirigível e de seus atuadores. A dinâmica do dirigívelé altamente não linear e subatuada, com um comportamento variado, dependente do valor davelocidade do ar que varia do voo pairado ou voo de baixa velocidade para o de cruzeiro ou vooaerodinâmico (De Paiva et al., 2006) (Gomes e Ramos, 1998). A transição abrupta e continuadada dinâmica entre pairar e o voo aerodinâmico implica num uso diferente de atuadores paracada situação. Quando em voo aerodinâmico, os atuadores mais importantes são as hélices depropulsão e as superfícies aerodinâmicas de controle (profundor, leme e aileron), enquanto quequando em voo pairado os atuadores eficazes são as hélices de propulsão com sua vetorização,propulsão diferencial e o impulso de popa, quando disponível.
Para ilustrar a ideia do uso diferente de atuadores para cada situação, considere os valo-res de equilíbrio do ângulo de vetorização dos propulsores e sua força de propulsão versus avelocidade do ar representada nas figuras 3.4 e 3.5.
A figura 3.4 mostra que em velocidades muito baixas (𝑉𝑡 < 4𝑚/𝑠) o ângulo de vetoriza-
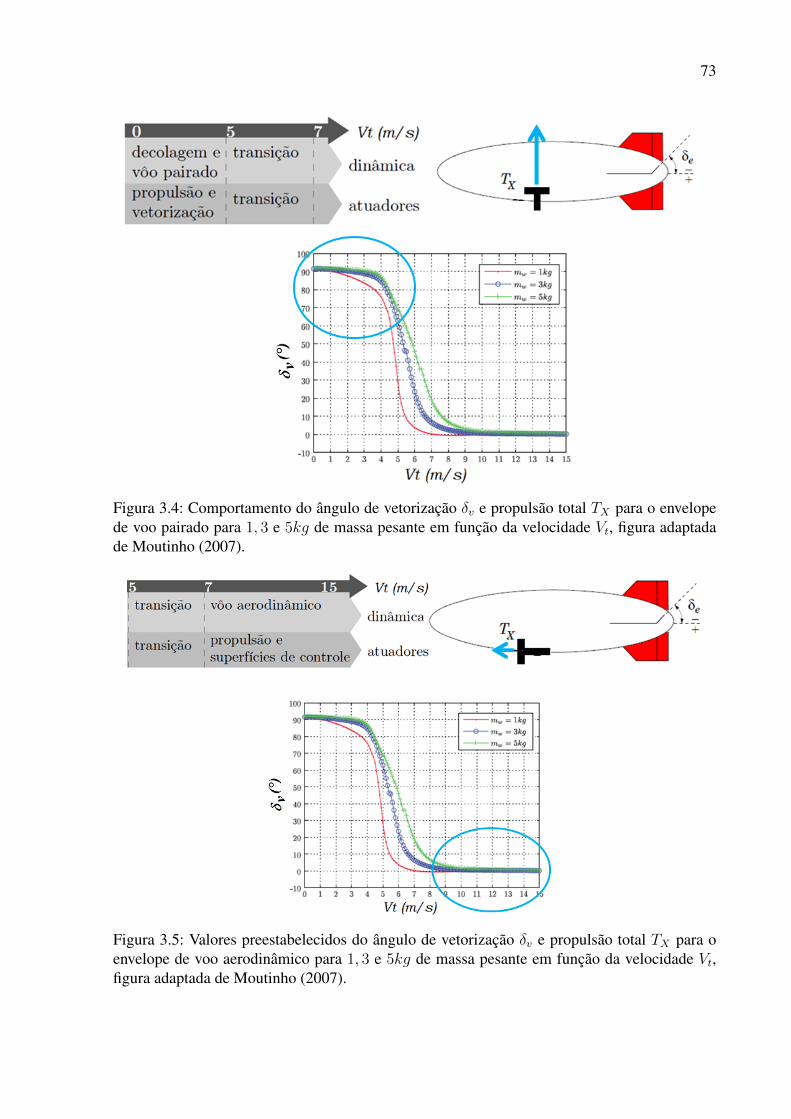
73
Figura 3.4: Comportamento do ângulo de vetorização 𝛿𝑣 e propulsão total 𝑇𝑋 para o envelopede voo pairado para 1, 3 e 5𝑘𝑔 de massa pesante em função da velocidade 𝑉𝑡, figura adaptadade Moutinho (2007).
Figura 3.5: Valores preestabelecidos do ângulo de vetorização 𝛿𝑣 e propulsão total 𝑇𝑋 para oenvelope de voo aerodinâmico para 1, 3 e 5𝑘𝑔 de massa pesante em função da velocidade 𝑉𝑡,figura adaptada de Moutinho (2007).

74
ção 𝛿𝑣 é aproximadamente 90𝑜 (área assinalada com uma linha fechada no gráfico) e o modelo éessencialmente o de forças aerostáticas, com o excesso de peso sendo compensado pela propul-são 𝑇𝑋 . Com as hélices na posição vertical, uma propulsão diferencial 𝑇𝐷 levará a um momentode rolamento. Se estiver disponível, o propulsor lateral de cauda 𝑇𝑌 fornece uma força lateral eum torque de guinada. Na sua ausência, o momento de rolamento é na verdade o único controlesignificativo de torque disponível, uma vez que é uma função da pressão dinâmica, e por con-seguinte, variando com a velocidade do ar ao quadrado, as superfícies de controle da cauda, 𝛿𝑎,𝛿𝑟 e 𝛿𝑒, tem uma autoridade reduzida quando em voo pairado.
A figura 3.5 mostra que em velocidades maiores (𝑉𝑡 > 8𝑚/𝑠), a vetorização não é maisnecessária, seu valor chega próximo a zero (área assinalada com uma linha fechada no gráfico)com o modelo sendo essencialmente o de forças aerodinâmicas. A propulsão total é principal-mente demandada para compensar a força de arraste, que aumenta com o quadrado da veloci-dade do ar, segundo Khoury et al. (1999) e não depende da condição de seu peso. Diretamenteacoplado do ângulo de vetorização, a propulsão diferencial agora produz um momento de gui-nada. As superfícies de controle de cauda 𝛿𝑎, 𝛿𝑟 e 𝛿𝑒 respectivamente, controlam os momentosde rolagem, guinada e de arfagem, respectivamente. Portanto, embora possa ter até 7 entradasde atuadores para controlar 6 forças (3 forças e 3 torques), devido às limitações de sua contro-labilidade o dirigível é de fato um sistema subatuado, particularmente à baixas velocidades doar.
Para a execução das missões, o controlador do dirigível dispõe do vetor de forças prove-niente da equação 3.8, correspondente a:
F𝑝 + F𝑎 = F + f =
[F
′𝑝 + F
′𝑎
T′𝑝 + T
′𝑎
]. (3.38)
Essas forças são provenientes de duas parcelas distintas, entende-se que F = F (x), de-pende apenas dos estados, estes esforços estão relacionados às forças e momentos de origemaerodinâmica
(F
′𝑎,T
′𝑎
)gerados em função dos ângulos do fluxo de ar incidente sobre o dirigí-
vel, isto é, dependem dos ângulos de ataque e escorregamento lateral. A força f é atribuída àentrada de força dos atuadores ou do controle, com uma parcela referente às forças
(F
′𝑎,T
′𝑎
),
geradas pelo acionamento das superfícies aerodinâmicas dos atuadores da cauda e uma parcelareferente aos propulsores
(F
′𝑝,T
′𝑝
).
As relações dos atuadores para entradas de força podem ser estabelecidas em uma aborda-gem aproximada negligenciando a dinâmica dos atuadores, utilizando a medição de velocidadedo ar e resolvendo as possíveis redundâncias de acordo com o funcionamento normal do dirigí-vel (De Paiva et al., 2006). Desta maneira tem-se:
f = f𝑈 (U,𝑉𝑡) (3.39)
onde U = [𝑇𝑋 , 𝛿𝑣, 𝑇𝐷,𝛿𝑎, 𝛿𝑒, 𝛿𝑟]𝑇 ∈ R6 é a entrada real dos atuadores, f =
75
[𝑓1, 𝑓2, 𝑓3, 𝑡1, 𝑡2, 𝑡3]𝑇 ∈ R6 é o vetor de força e momentos, e 𝑉𝑡 é a velocidade real do ar.
O impulso lateral 𝑇𝑌 a partir da hélice da popa é omitido , uma vez que não é usado no dirigívelAURORA. Neste caso, a entrada f é computada como solução do sistema composto pelas seisequações a seguir, em concordância com a descrição anterior do modelo do dirigível AURORA:
𝑓1 = 𝑇𝑋 cos (𝛿𝑣) + 𝑘1𝛿𝑒, 𝑓2 = −𝑘2𝛿𝑟, 𝑓3 = −𝑇𝑋 sin (𝛿𝑣) + 𝑘3𝛿𝑒,
𝑡1 = 𝑘2𝑙4𝛿𝑎 + 𝑏4 sin (𝛿𝑣)𝑇𝐷, 𝑡2 = 𝑇𝑋𝑏3 cos (𝛿𝑣) + 𝑘5𝛿𝑒, 𝑒 𝑡3 = 𝑘2𝑙6𝛿𝑟 + 𝑏4 cos (𝛿𝑣)𝑇𝐷,
(3.40)
onde (𝑏𝑗,𝑙𝑗) são constantes geométricas do dirigível, e 𝑘𝑗(𝑉𝑡) são polinômios de segunda ordemexpressando a velocidade do ar dependendo da inclinação dos defletores de cauda.
3.7 Estimação do vento e referências de atitude para controle de trajetória
O dirigível tem seu envelope construído de maneira a minimizar o arraste aerodinâmico,entretanto a sua trajetória está à merce da direção do vento influenciando no seu posicionamentoa todo instante, portanto nem sempre seu posicionamento longitudinal coincide com a direçãode sua trajetória. Nesta seção será estudada a influência da direção do vento sobre a atitudeadotada no cumprimento da misssão de voo.
A intuição nos leva a imaginar que a atitude angular de referência seja coincidente com aatitude de referência da trajetória Φ𝑟. No entanto, há duas situações quando isto não é desejável:na presença de perturbações de vento (o que ocorre quando se voa ao ar livre) e se o objetivo épairar sobre uma posição no solo (uma vez que neste caso Φ𝑟 seja arbitrariamente definida).
Uma aeronave de forma convencional deve voar contra o vento aparente, a fim de reduzira resistência do ar (Stevens e Lewis, 1992). A atitude do vento Φ𝑤 = [𝜑𝑤, 𝜃𝑤, 𝜓𝑤]𝑇 pode sercalculada, correspondendo aos ângulos p𝑤 formados com o sistema de coordenadas inercial𝑖 (com 𝜑𝑤 = 0). Isto vale para dirigíveis, ainda mais devido à subatuação lateral. Então, odirigível vai tentar alinhar-se com a direção relativa do ar, minimizando o ângulo de derrapa-gem lateral 𝛽. Por esta razão, a atitude angular relativa do ar Φ𝑎𝑟 é escolhida como atitude dereferência.
Calcula-se Φ𝑎𝑟 seguindo-se quatro passos (Moutinho, 2007):1. Com a atitude do dirigível Φ e as variáveis aerodinâmicas: velocidade real do ar (𝑉𝑡 =√
𝑢2𝑎 + 𝑣2𝑎 + 𝑤2𝑎 em 𝑚/𝑠), ângulo derrapagem lateral (𝛽) e ângulo de ataque (𝛼) variáveis
medidas, calcula-se a velocidade inercial do ar p𝑎 (vide figura 3.6):
p𝑎 = STva = STSa𝑇
⎡⎢⎣ 𝑉𝑡
0
0
⎤⎥⎦ (3.41)
com S e Sa definidas pelo anexo A.

76
Figura 3.6: Estimador de vento e de referência de guinada. Adaptada de Moutinho (2007).
2. Usando a velocidade inercial p, estima-se o vetor de velocidade inercial do vento p𝑤 por:
p𝑤 = p− p𝑎. (3.42)
3. Define-se a velocidade relativa do ar de referência como:
p𝑎𝑟 = pr − p𝑤. (3.43)
4. Finalmente, temos Φ𝑎𝑟 = [0, 𝜃𝑎𝑟 , 𝜓𝑎𝑟 ]𝑇 , que corresponde aos ângulos p𝑎𝑟 formados com
o sistema de coordenadas inercial 𝑖.A partir da metodologia apresentada observa-se que:- no caso de não haver vento, p𝑤 = 0 e Φ𝑎𝑟 coincide com a atitude da trajetória de
referência Φ𝑟;- para o voo pairado sobre uma posição, p𝑟 = 0 implica na atitude de referência de
trajetória indefinida e Φ𝑎𝑟 = −Φ𝑤 reduzindo o esforço lateral devido à minimização da forçade arraste.
Observa-se que 𝜃𝑎𝑟 calculado desta maneira não considera o ângulo de arfagem de equilí-brio (𝜃𝑒). Portanto, para reduzir a sustentação do dirigível uma correção deve ser usada:
𝜃′𝑎𝑟 = 𝜃𝑎𝑟 + 𝜃𝑒. (3.44)
A atitude de referência correta é ilustrada pela parte (I) da figura 3.6 e seu valor dado por:
Φ′𝑎𝑟 = [0, 𝜃′𝑎𝑟 , 𝜓𝑎𝑟 ]
𝑇. (3.45)
77
3.8 Modelo de turbulência
O ação do controle do dirigível em uma missão será influenciado pela turbulência atmos-férica que modifica a velocidade do vento atuante sobre o envelope da aeronave.
Segundo McLean (1990) distúrbios atmosféricos são ocasionados devido ao ar em tornode uma aeronave em voo apresentar-se sempre em movimento. A natureza desses distúrbios noar é influenciada por muitos fatores, mas é costume considerar a turbulência que ocorre acimade uma região onde a atmosfera se comporta como uma camada limite, existem duas formas deturbulência conhecidas:
1. Turbulência convectiva, que ocorre em e ao redor das nuvens, como em tempestades comtrovoadas.
2. Turbulência de ar claro (CAT), se apresenta de diversas formas: com ocorrências abaixoda base de nuvens, devido ao movimento do ar e a convecção direta e do aquecimento,que somado a presença de pequenos redemoinhos resultantes do aquecimento da super-fície terrestre, são consideradas CAT leves, a turbulência ocorre também acima de aglo-merados de nuvens do tipo Cúmulus. Mais severa é a CAT encontrada nas montanhase dependendo das condições meteorológicas, os voos próximos à tropopausa podem serturbulentos. A turbulência mais intensa de todas é causada em áreas próximas a tempesta-des especialmente quando ocorrem simultaneamente chuva, granizo, formação de blocosde gelo ou neve.Dois outros fenômenos da movimentação na forma de correntes de ar importantes são
as “tesouras de vento”, mudanças severas na natureza do vento causadas pela convecção e osconhecidos microbursts causados pela convecção ascensão, ou queda, de colunas de ar, rodeadopor toroides de extrema vorticidade.
O modelo de turbulência representa as perturbações introduzidas no sistema por conta davariação de velocidades, intensidade e direção do ar ao redor do dirigível. Segundo De Paiva eAzinheira (2001) o vetor da velocidade do vento é composto de duas partes: uma parte de-terminística, considerada constante e agindo no plano horizontal com a componente linearv𝑐𝑤 = [𝑢𝑐𝑤, 𝑣𝑐𝑤, 𝑤𝑐𝑤]𝑇 e a angular w𝑐𝑤 = [𝑝𝑐𝑤, 𝑞𝑐𝑤, 𝑟𝑐𝑤]𝑇 no sistema de coordenadas ter-restre (NED); e a outra parte estocástica, modelada como uma turbulência constante com acomponente linear v𝑔 = [𝑢𝑔, 𝑣𝑔, 𝑤𝑔]
𝑇 e a angular w𝑔 = [𝑝𝑔, 𝑞𝑔, 𝑟𝑔]𝑇 , gerados a partir de três
entradas de ruido branco n𝑔 = [𝑛𝑢, 𝑛𝑣, 𝑛𝑤]𝑇 . O vetor da velocidade do vento x𝑤 = x𝑐𝑤 + x𝑔,com x𝑐𝑤 = [v𝑐𝑤, w𝑐𝑤]𝑇 e x𝑔 = [v𝑔, w𝑔]
𝑇 , é usado para calcular a velocidade do ar do dirigívelx𝑎 = x− x𝑤, sendo esta aplicada como entrada do controlador.
Como os mecanismos formação de turbulência são variados, métodos estatísticos são em-pregados na análise de sua ocorrência.
No simulador empregado para testes do dirigível utiliza-se o modelo de Dryden (McLean,1990) apresentado a seguir.
Para gerar os sinais de turbulência com a intensidade requerida, são usadas funções de

78
escalas de comprimento e densidade espectral de potência (PSD) para algumas velocidades ealtitudes dadas e uma fonte de ruído branco com uma função PSD Φ𝑁(𝜔) = 1 é utilizada paragerar o sinal de entrada para um filtro linear, escolhido de tal forma que tenha uma respostaem frequência apropriada tal que o sinal de saída do filtro tenha uma função PSD Φ𝑖(𝜔). Estaestrutura pode ser vista no diagrama de blocos apresentado na figura 3.7.
Figura 3.7: Diagrama de blocos do gerador de turbulência. Adaptada de McLean (1990).
A relação da função PSD do sinal de saída com a função PSD do sinal de entrada é dadapor:
Φ𝑖(𝜔) = |𝐺𝑖(𝑠)|2𝑠=𝑗𝑤Φ𝑁(𝜔). (3.46)
Filtros são utilizados para gerar as densidades espectrais para as velocidades de turbulên-cia translacional. O modelo escolhido para a representação da turbulência, para a componentevertical, é dado por:
Φ𝑣(Ω) =𝜎2𝐿(1 + 3𝐿2Ω2)
𝜋(1 + 𝐿2Ω2)2, (3.47)
com Φ uma função que retorna o valor médio quadrático da turbulência como função de suafrequência espacial, 𝜎 como a intensidade da turbulência em 𝑚/𝑠; 𝐿 como um fator de escalapara o comprimento da onda da turbulência atmosférica e Ω como frequência espacial, dada em𝑟𝑎𝑑/𝑚.
A intensidade da turbulência é considerada isotrópica, isto é:
𝜎2𝑢
𝐿𝑢=𝜎2𝑏
𝐿𝑏=𝜎2𝑤
𝐿𝑤(3.48)
e seu valor máximo é atingido no caso de uma tempestade com 𝜎𝑢 = 𝜎𝑣 = 𝜎𝑤 = 7𝑚/𝑠.A perturbação é representada pelas componentes de velocidade 𝑢𝑔, 𝑣𝑔, 𝑤𝑔, 𝑝𝑔, 𝑞𝑔, 𝑟𝑔,
constantes no tempo, mas variantes no espaço. Portanto, os parâmetros que definem o modelo deturbulência dependem da atitude do dirigível e a escala de comprimento de onda da turbulênciavaria em função de sua altitude. Essa relação é definida pelas da seguinte maneira: se ℎ > ℎ0:
𝐿𝑢 = 𝐿𝑣 = 𝐿𝑤 = ℎ0;
se ℎ ≤ ℎ0:𝐿𝑢 = 𝐿𝑣 =
√ℎ0ℎ, 𝐿𝑤 = ℎ,
com ℎ0 = 533 𝑚 e ℎ como a altitude do dirigível em meio à turbulência.
79
4 PROJETO DE CONTROLADORES NÃO LINEARES DO TIPOBACKSTEPPING E MODOS DESLIZANTES
Neste capítulo serão apresentadas as metodologias de projeto de controladores não linea-res para dirigíveis propostas neste trabalho. Em primeiro lugar será apresentado o controladorBackstepping_MP (Moriguchi-Paiva) (BS_MP) inspirada na metodologia de Fossen e Strand(1999). A técnica proposta (BS_MP) se diferencia desta última por trabalhar com um modelomais simplificado nas equações de Lyapunov e por incluir a estimação de perturbações. Emseguida, são deduzidas as equações para o projeto do controlador Backstepping-Modos Desli-
zantes (BSMC_MP) e Modos Deslizantes (SMC).Na seção 4.4 é apresentado um resumo das diferenças entre os controladores estudados,
comparando os elementos utilizados no seu projeto. As leis de controle propostas compartilhamentre si e de forma adequada os ganhos definidos pela metodologia, o que é ressaltado através douso de cores diferentes no texto para melhor entendimento de sua aplicação. No item 4.4.1 sãoapresentadas as variáveis de cada controlador utilizadas na escolha das funções de Lyapunov(item 4.4.2) e no item 4.4.5 são mostradas as leis de controle. No item 4.4.6 é apresentada umaverificação prática para formação dos controladores Backstepping_MP e Backstepping-Modos
Deslizantes. No item 4.4.7 são apresentadas as topologias dos controladores em malha fechada.
4.1 Projeto do controlador Backstepping_MP
O projeto BS_MP é feito de forma recursiva, selecionando-se algumas funções apropri-adas de variáveis de estado como entradas de pseudo controle para subsistemas de menor di-mensão que o sistema base global. Finalmente, a estabilidade é provada com a definição de umafunção de Lyapunov adequada.
Vamos considerar os casos de problema de controle de posicionamento (voo pairado)e rastreamento trajetória, conforme definido anteriormente. O problema do projeto pode serresolvido mediante a aplicação de uma transformação de variáveis de estado adequada.
Em primeiro lugar, consideram-se as variáveis originais do sistema definidas com auxíliodas equações 3.20 e 3.27, e assumindo vento constante, temos:⎧⎪⎪⎪⎨⎪⎪⎪⎩
x1 = 𝜂
x2 = = Tx + Bp𝑤
x2 = = Tx + DΩ7Cx.
(4.1)
Em seguida, é definida a referência de velocidade virtual:
𝑣 = 𝑟 −K1𝜂,

80
onde temos: ⎧⎨⎩𝜂 = 𝜂 − 𝜂𝑟𝜂 = − 𝑟,(4.2)
que são os erros 𝜂 de rastreamento de posição e 𝜂 de velocidade em relação ao referencialfixo e K1 é uma matriz diagonal definida positiva. Além disso, vamos designar uma medida derastreamento, seguindo a ideia de Slotine e Li (1987), de modo que:
s , − 𝑣 = 𝜂 + K1𝜂,que combina os erros de posição e velocidade em uma só expressão para transformar o sistemade grau relativo 2 para grau relativo 1.
Definem-se agora as variáveis transformadas a serem utilizadas no projeto do controlador:⎧⎨⎩z1 = 𝜂 − 𝜂𝑟
z2 = s = 𝜂 + K1𝜂. (4.3)
O projeto do controlador Backstepping_MP consiste em dois passos que são:
PASSO 1A definição do vetor de controle virtual é dado por:
x2 , z2 + 𝛼1 → = s + 𝛼1, (4.4)
onde 𝛼1 é a função de estabilização escolhida como:
𝛼1 = 𝑣 = 𝑟 −K1𝜂.Assim a equação (4.4) as variáveis podem ser reescrita como:⎧⎪⎪⎪⎨⎪⎪⎪⎩
= s + 𝑟 −K1𝜂 − 𝑟 = s−K1𝜂𝜂 = −K1𝜂 + s
(4.5)
ou utilizando as variáveis transformadas da equação (4.3) obtêm-se:
z1 = 𝜂 = 𝜂 − 𝜂𝑟 (4.6)
z1 = 𝜂 = − 𝑟 (4.7)
z1 = −K1z1 + z2 (4.8)

81
z2 = z1 + K1z1. (4.9)
Agora considere-se a equação a seguir como função candidata de Lyapunov e sua deri-vada:
𝑉1 =1
2z𝑇1Λ1z1 (4.10)
1 = z𝑇1Λ1z1 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 (4.11)
onde Λ1 é uma matriz diagonal definida positiva.
PASSO 2Considere-se agora outra equação candidata de Lyapunov:
𝑉2 = 𝑉1 +1
2z𝑇2 z2 (4.12)
e a sua derivada:2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 + z𝑇2 z2. (4.13)
Recordando as equações (4.3) e (4.2) temos:
z2 = s = 𝜂 + K1𝜂z2 = − 𝑟 + K1z1 = + K1z1, (4.14)
onde assumiu-se 𝑟 = 0, considerando a velocidade de referência constante, propõe-se então aseguinte expressão para o vetor aceleração:
= −Λ1z1 −Λ2z2 −K1z1, (4.15)
onde Λ2 é uma matriz diagonal definida positiva tal que:
2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 + z𝑇2 ( + K1z1) (4.16)
2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 + z𝑇2 (−Λ1z1 −Λ2z2 −K1z1 + K1z1) (4.17)
2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 + z𝑇2 (−Λ1z1 −Λ2z2) (4.18)
ou, como Λ1 é diagonal positiva z𝑇1Λ1z2 = z𝑇2Λ1z1:
2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 − z𝑇2Λ1z1 − z𝑇2Λ2z2 = −z𝑇1Λ1K1z1 − z𝑇2Λ2z2 < 0. (4.19)
Como 2 < 0, pela equação (4.19) temos a estabilidade do sistema garantida.O vetor de aceleração inercial proposto pela equação (4.15) pode ser aplicado à equação
82
da aceleração local (4.1) e assim ficamos com:
x = T+( −DΩ7Cx)
x = T+[−Λ2z2 −Λ1z1 −K1z1 −DΩ7Cx]. (4.20)
Esta última equação (4.20) pode ainda ser incluída na dinâmica do modelo representadona equação (3.11):
f = M(x−Kx) − E𝑔Sg − F.
Substituindo o vetor de aceleração na equação anterior resulta em:
f = MT+ [−Λ2z2 −Λ1z1 −K1z1 −DΩ7Cx] −MKx− E𝑔Sg − F.
Utilizando a equação (4.9) podemos eliminar a variável z2, pois:
z2 = z1 + K1z1
f = MT+ [−Λ2z1 −Λ2K1z1 −Λ1z1 −K1z1 −DΩ7Cx] −MKx− E𝑔Sg − F (4.21)
f = MT+ [−(Λ2 + K1)z1 − (Λ2K1 + Λ1)z1 −DΩ7Cx] −MKx− E𝑔Sg − F. (4.22)
A seguir utiliza-se novamente a definição da variável transformada da equação (4.3)z1 = 𝜂 − 𝜂𝑟 para visualizar melhor os erros de posição e velocidade e caracterizar os ganhos“proporcional” e “derivativo” na ação do controle:
f = MT+ [−(Λ2 + K1)( − 𝑟) − (Λ2K1 + Λ1) (𝜂 − 𝜂𝑟) −DΩ7Cx]−MKx−E𝑔Sg−F.
(4.23)Finalmente substituindo − 𝑟 apresentado na equação (3.34) por:
− 𝑟 = Tx + Bp𝑤 −T𝑟x𝑟,
resulta em:
f = MT+[−(Λ2 + K1)(Tx + Bp𝑤 −T𝑟x𝑟) − (Λ2K1 + Λ1) (𝜂 − 𝜂𝑟) +
−DΩ7Cx] −MKx− E𝑔Sg − F.(4.24)
O equacionamento apresentado acima pressupõe o comportamento do vento conhecido(𝑤). Para o caso de estimar o comportamento do vento, utiliza-se o equacionamento do anexoB.

83
4.2 Projeto do controlador Backstepping-Modos Deslizantes
Assim, apenas adicionando um termo de chaveamento na lei de controle BS_MP, a fim deaumentar a robustez do controlador, obtemos o controlador Backstepping-Modos Deslizantes
(BSMC_MP ).Considerando-se o PASSO 1 semelhante ao do controlador BS_MP, seguimos com o
PASSO 2.A segunda equação candidata de Lyapunov, também definida como no controlador
BS_MP é apresentada a seguir:
𝑉2 = 𝑉1 +1
2z𝑇2 z2
2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 + z𝑇2 z2.
Recordando que das equações (4.9) e (4.2) temos:
z2 = s = 𝜂 + K1𝜂z2 = − 𝑟 + K1z1 = + K1z1. (4.25)
Onde assumiu-se 𝑟 = 0, considerando a velocidade de referência constante. Entãodefine-se a aceleração adicionando-se um termo de chaveamento Λ𝑠 sgn(z2), onde Λ𝑠 é umamatriz diagonal definida positiva. Deste modo tem-se:
= −Λ1z1 −Λ2z2 −K1z1 + Λ𝑠 sgn(z2), (4.26)
de tal modo que a função de Lyapunov seja:
2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 + z𝑇2 ( + K1z1). (4.27)
Substituindo-se a aceleração da equação (4.26) definida anteriomente na equação (4.27)temos:
2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 + z𝑇2 (−Λ1z1 −Λ2z2 −K1z1 + Λ𝑠 sgn(z2) + K1z1) (4.28)
2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 + z𝑇2 (−Λ1z1 −Λ2z2 + Λ𝑠 sgn(z2)) (4.29)
ou2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 − z𝑇2Λ1z1 − z𝑇2Λ2z2 + z𝑇2Λ𝑠 sgn(z2) (4.30)
2 = −z𝑇1Λ1K1z1 − z𝑇2Λ2z2 + z𝑇2Λ𝑠 sgn(z2) < 0. (4.31)
O vetor de aceleração inercial proposto pela equação (4.26) pode ser aplicado à equação
84
da aceleração local (4.1), deste modo tem-se:
x = T+( −DΩ7Cx)
x = T+ [−Λ2z2 −Λ1z1 −K1z1 + Λ𝑠 sgn(z2) −DΩ7Cx] . (4.32)
Esta última equação (4.32) pode ainda ser incluída na dinâmica do modelo representadona equação (3.11):
f = M(x−Kx) − E𝑔Sg − F.
Substituindo o vetor de aceleração na equação da força resulta em:
f = MT+ [−Λ2z2 −Λ1z1 −K1z1 + Λ𝑠 sgn(z2) −DΩ7Cx] −MKx− E𝑔Sg − F. (4.33)
Utilizando as equações (4.9) podemos eliminar a variável z2, da equação (4.33) pois:
z2 = z1 + K1z1
f = MT+ [−Λ2z1 −Λ2K1z1 −Λ1z1 −K1z1 + Λ𝑠 sgn(z2) −DΩ7Cx]−MKx−E𝑔Sg−F
(4.34)f = MT+ [−(Λ2 + K1)z1 − (Λ2K1 + Λ1)z1 + Λ𝑠 sgn(z2) −DΩ7Cx]−MKx−E𝑔Sg−F
(4.35)f = MT+[−(Λ2 + K1)( − 𝑟) − (Λ2K1 + Λ1) (𝜂 − 𝜂𝑟) +
Λ𝑠 sgn(z2) −DΩ7Cx] −MKx− E𝑔Sg − F,(4.36)
substituindo − 𝑟 apresentado na equação (3.34) por:
− 𝑟 = Tx + Bp𝑤 −T𝑟x𝑟,
a lei de controle torna-se então:
f = MT+[−(Λ2 + K1)(Tx + B𝑤 −T𝑟x𝑟) − (Λ2K1 + Λ1) (𝜂 − 𝜂𝑟) +
−Λ𝑠 sgn(𝑠) −DΩ7Cx] −MKx− E𝑔Sg − F.(4.37)
4.3 Projeto do controlador por Modos Deslizantes
De um modo geral, a criação de um controlador de modos deslizantes convencional ouclássica é também dividido em duas etapas. O primeiro passo é a definição da superfície dedeslizamento e o segundo passo é a concepção da lei de controle, de tal modo que os estadosdo sistema aproximam-se e permanecem na intersecção da superfície de deslizamento. Para aconcepção da superfície de deslizamento, consideramos uma combinação dos erros de posiçãoe velocidade numa única expressão, de modo que se resulte em um sistema de primeira ordeme de grau relativo um. Esta construção resulta da ideia proposta por Slotine et al. (1991), para o

85
controle de posição e velocidade de articulações de manipuladores robotizados.Tomando-se:
s , 𝜂 + K1𝜂,a superfície de deslizamento definida desta maneira é equivalente à segunda variável auxiliar z2do projeto Backstepping_MP anterior. Além disso, esta superfície de deslizamento correspondeao erro de velocidade entre a velocidade e a velocidade de referência virtual 𝑣, definidoanteriormente na seção BS_MP, que é:
s = − 𝑣 = 𝜂 + K1𝜂.Ao invés do caso Backstepping_MP, a função de Lyapunov considera somente a variável
z2:𝑉2 =
1
2s𝑇 s =
1
2z𝑇2 z2
e sua derivada é dada por:2 = z𝑇2 z2 = z𝑇2 (z1 + K1z1)
2 = z𝑇2 ( − 𝑟 + K1z1). (4.38)
A lei de controle proposta é obtida impondo-se um termo linear mais um termo de chave-amento na aceleração global, que fica:
− 𝑟 + K1z1 = −Λ2z2 −Λ𝑠 sgn(z2),
onde assumiu-se 𝑟 = 0, considerando a velocidade de referência constante.
= 𝑟 −K1z1 −Λ2z2 −Λ𝑠 sgn(z2) ≈ −K1z1 −Λ2z2 −Λ𝑠 sgn(z2). (4.39)
Substituindo-se a equação (4.39) da aceleração na expressão de Lyapunov tem-se:
2 = −z𝑇2Λ2z2 − z𝑇2Λ𝑠 sgn(z2) < 0.
O que confirma a estabilidade assintótica do sistema. A aceleração local proposta pelaequação (4.39) pode ser aplicada à equação da aceleração (4.1) assim:
x = T+( −DΩ7Cx)
x = T+ [−K1z1 −Λ2z2 −Λ𝑠 sgn(z2) −DΩ7Cx]
e a lei de controle fica:f = M(x−Kx) − E𝑔Sg − F
f = MT+ [−K1z1 −Λ2z2 −Λ𝑠 sgn(z2) −DΩ7Cx] −MKx− E𝑔Sg − F
86
f = MT+ [−K1z1 −Λ2z1 −Λ2K1z1 −Λ𝑠 sgn(z2) −DΩ7Cx] −MKx− E𝑔Sg − F
f = MT+ [−(Λ2 + K1)( − 𝑟) − (Λ2K1) (𝜂 − 𝜂𝑟) −Λ𝑠 sgn(z2) −DΩ7Cx] +
−MKx− E𝑔Sg − F.
Este projeto de controle considera a entrada do vento conhecida. Para o caso de estimar ovento, vide anexo B
4.4 Comparações dos três controladores BS_MP, BSMC_MP e SMC
A seguir são mostradas as diferenças entre os controladores Backstepping_MP,
Backstepping-Modos Deslizantes e Modos Deslizantes. Essas diferenças mostram as variáveisauxiliares, Funções de Lyapunov escolhidas e as leis de formação de controle resultantes decada tipo de controlador implementado.
4.4.1 Variáveis Auxiliares
As variáveis auxiliares apresentadas nas equações 4.9 são compostas pelas mesmas fun-ções nos controladores Backstepping_MP e Backstepping-Modos Deslizantes e apenas por umavariável no caso do controlador por Modos Deslizantes, como pode ser visto a seguir:⎧⎨⎩z1 = 𝜂 − 𝜂𝑟
z2 = s = z1 + K1z1.(4.40)
A tabela 4.1 mostra as variáveis utilizadas nos diferentes controladores projetados nestetrabalho.
Abordagem VariáveisBS_MP z1, z2
BSMC_MP z1, z2SMC z2
Tabela 4.1: Variáveis auxiliares para os controladores projetados
4.4.2 Funções de Lyapunov
As funções escolhidas para a verificação da estabilidade para os controladores Backstep-
ping_MP e Backstepping-Modos Deslizantes são as mesmas e no controlador Modos Deslizan-
tes, se apresenta apenas pela segunda parcela das funções escolhidas nas anteriores.As funções de Lyapunov escolhidas para cada controlador, bem como suas derivadas são
apresentadas na tabela 4.2.
87
Abordagem 𝑉2 2
BS_MP 12z𝑇1Λ1z1 + 1
2z𝑇2 z2 −z𝑇1Λ1K1z1 − z𝑇2Λ2z2 < 0
BSMC_MP 12z𝑇1Λ1z1 + 1
2z𝑇2 z2 −z𝑇1Λ1K1z1 − z𝑇2Λ2z2 − z𝑇2Λ𝑠 sgn(z2) < 0
SMC 12z𝑇2 z2 z𝑇2Λ2z2 − z𝑇2Λ𝑠 sgn(z2) < 0
Tabela 4.2: Funções de Lyapunov para os controladores projetados
4.4.3 Leis de formação do controle em termos do erro da aceleração
As leis de Formação dos controladores são escolhidas de modo a garantir que as derivadasdas funções de Lyapunov sejam negativas. A tabela 4.3 apresenta as equações em termos daaceleração utilizadas para o cálculo da formação dos controladores.
Abordagem Lei de formação do controlador em 𝜂
BS_MP = −Λ2z2 −K1z1 −Λ1z1
BSMC_MP = −Λ2z2 −Λ𝑠 sgn(z2) −K1z1 −Λ1z1
SMC = −Λ2z2 −Λ𝑠 sgn(z2) −K1z1
Tabela 4.3: Termos de aceleração utilizados na formação dos controladores projetados
4.4.4 Leis de formação do controle em termos da derivada da variável transfor-mada z2
As equações do item anterior, podem ser reescritas utilizando-se os termos da derivada davariável transformada para facilitar a verificação da estabilidade realizada posteriormente.
Dada a equação da tabela 4.2 para o controlador Backstepping_MP obtemos:
+ K1z1 = −Λ2z2 −Λ1z1 (4.41)
recordando a equação (4.25) pode-se reescrever a equação (4.41) em termos da variável trans-formada z2. Assim fica-se com:
z2 = − 𝑟 + K1z1 = + K1z1 (4.42)
onde 𝑟 = 0, devido a velocidade de referência ser constante.Substituindo este resultado na equação (4.41), obtém-se:
z2 = −Λ2z2 −Λ1z1. (4.43)
88
Da mesma forma as equações do controlador Backstepping-Modos Deslizantes e do con-trolador Modos Deslizantes podem ser reescritas como apresenta a tabela 4.4:
Abordagem Lei de formação do controlador em z2
BS_MP z2 = −Λ2z2 −Λ1z1
BSMC_MP z2 = −Λ2z2 −Λ𝑠 sgn(z2) −Λ1z1
SMC z2 = −Λ2z2 −Λ𝑠 sgn(z2)
Tabela 4.4: Termos de z2 utilizados na formação dos controladores projetados
4.4.5 Leis de Controle
As leis de controle obtidas apresentam semelhanças em seus termos, sendo que nos con-troladores Backstepping_MP e Backstepping-Modos Deslizantes temos o ganho matricial ex-clusivo Λ1 atuando de forma independente na parcela “proporcional” (erro de posição). Nestasleis de controle o ganho Λ2 é acoplado às parcelas “proporcional” e “derivativa” (erro de velo-cidade).
No controlador Backstepping-Modos Deslizantes e também no controlador Modos Des-
lizantes temos a presença do termo de chaveamento com os ganhos Λ𝑠 e o ganho Λ2 que éaplicado às parcelas “proporcional” e “derivativa”. As leis de controle obtidas para os controla-dores são apresentadas na tabela 4.5
Abordagem Lei de controle projetada
BS_MPf = MT+[−(Λ2 + K1)( − 𝑟) − (Λ2K1 + Λ1)(𝜂 − 𝜂𝑟)+
−DΩ7Cx] −MKx− E𝑔Sg − F
BSMC_MPf = MT+[−(Λ2 + K1)( − 𝑟) − (Λ2K1 + Λ1) (𝜂 − 𝜂𝑟) −Λ𝑠 sgn(s)+
−DΩ7Cx] −MKx− E𝑔Sg − F
SMCf = MT+[−(Λ2 + K1)( − 𝑟) − (Λ2K1) (𝜂 − 𝜂𝑟) −Λ𝑠 sgn(s)+
−DΩ7Cx] −MKx− E𝑔Sg − F.
Tabela 4.5: Leis dos controladores projetados
4.4.6 Derivadas de Lyapunov - conferência final
A seguir serão mostradas as equações que verificam se o projeto Backstepping_MP eBackstepping-Modos Deslizantes foi realizado corretamente. Segundo Fossen e Strand (1999),este procedimento, aplicável às abordagens de Backstepping do tipo vetorial, serve também

89
para verificar a condição de estabilidade descrita pela equação (2.22) do capítulo 2.1. As funçõesverificadoras seguem uma estrutura de formação definida pelas equações seguintes:
𝛺z = −𝛷z + 𝛹z, (4.44)
onde 𝛷 é uma matriz definida positiva e 𝛹 é uma matriz anti-simétrica de tal forma que z𝑇𝛹z =
0, ∀z.O erro da dinâmica será globalmente exponencialmente estável (GES) desde que:
𝑉 (z) =1
2z𝑇𝛺z
(z) = z𝑇𝛺z
(z) = z𝑇 [−𝛷z + 𝛹z]
(z) = −z𝑇𝛷z < 0, ∀z = 0.
A seguir são apresentadas as equações verificadoras para os controladores Backstep-
ping_MP e Backstepping-Modos Deslizantes desenvolvivos.Para o controlador Backstepping-MP, e relembrando a equação 4.9, temos:
z2 = z1 + K1z1
z1 = −K1z1 + z2
ou ainda, multiplicando por Λ1 obtemos:
Λ1z1 = −Λ1K1z1 + Λ1z2 (4.45)
e relembrando também a equação 4.43, pode-se escrever a equação abaixo:
[Λ1 0
0 I
][z1
z2
]= −
[Λ1K1 0
0 Λ2
][z1
z2
]+
[0 Λ1
−Λ1 0
][z1
z2
](4.46)
dessa forma, podemos reescrever a função de Lyapunov e sua derivada como:
𝑉 = 12(z𝑇1Λ1z1 + z𝑇2 z2) = 1
2z𝑇
[Λ1 0
0 I
]z
= z𝑇
[Λ1 0
0 I
]z = −
[z1 z2
] [ Λ1K1 0
0 Λ2
][z1
z2
]< 0.

90
Para o controlador Backstepping-Sliding Modes-MP temos:
[Λ1 0
0 I
][z1
z2
]= −
[Λ1K1 0
0 Λ2
][z1
z2
]+
[0 Λ1
−Λ1 0
][z1
z2
]−
[0
Λ𝑠 sgn(z2)
]
𝑉 = 12z𝑇
[Λ1 0
0 I
]z
= z𝑇
[Λ1 0
0 I
]z = −
[z1 z2
] [ Λ1K1 0
0 Λ2
][z1
z2
]−Λ𝑠 ‖z2‖1 < 0
com ‖𝑥‖1 como a norma de Manhatan 1.
1Norma de Manhatan ‖𝑥‖1 =𝑛∑
𝑖=1
|𝑥|
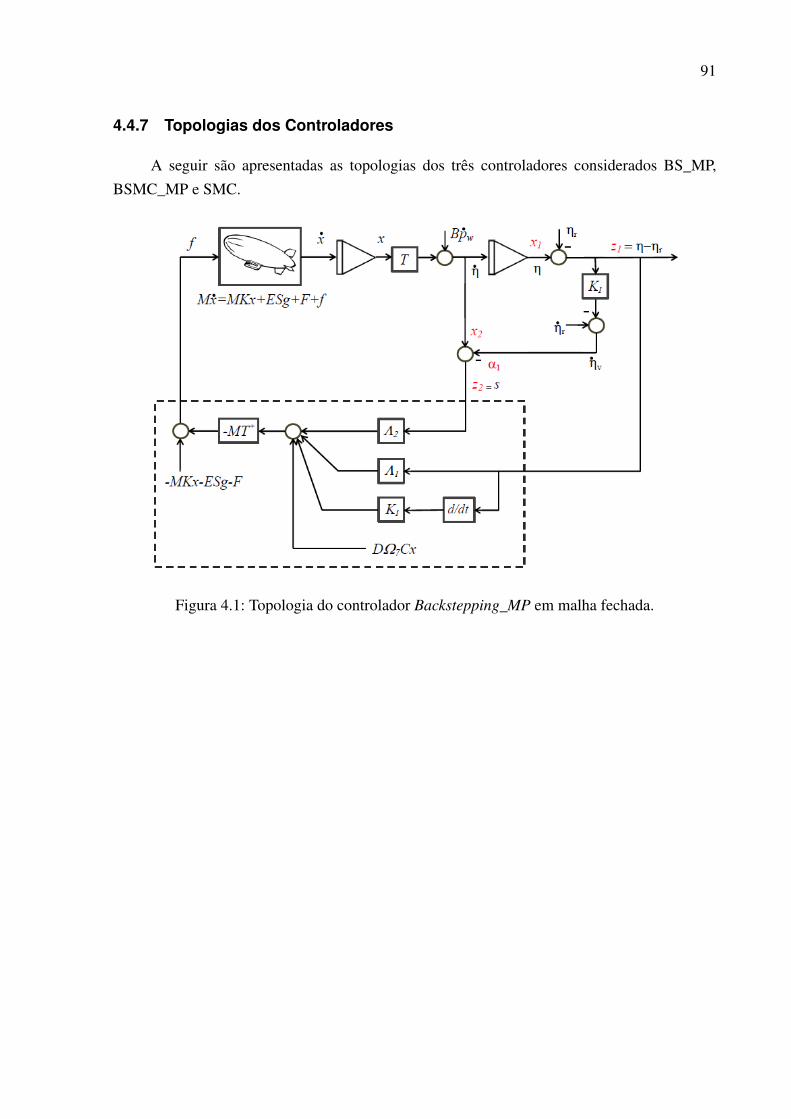
91
4.4.7 Topologias dos Controladores
A seguir são apresentadas as topologias dos três controladores considerados BS_MP,BSMC_MP e SMC.
Figura 4.1: Topologia do controlador Backstepping_MP em malha fechada.
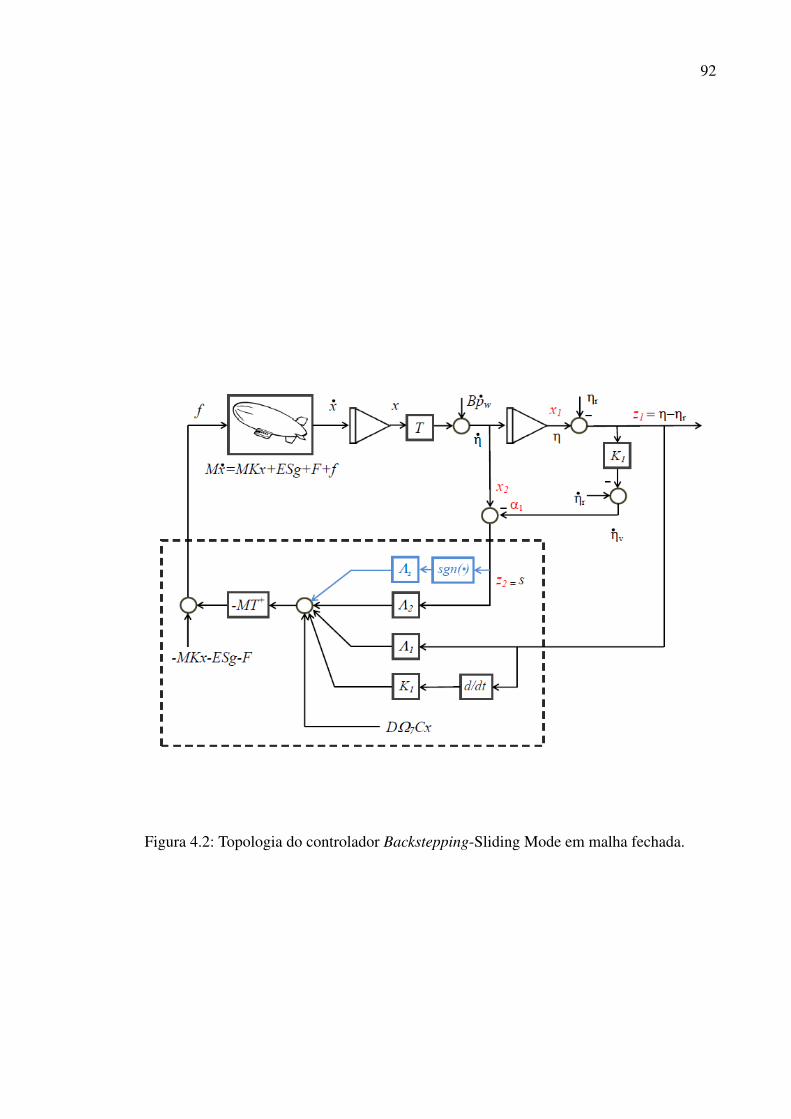
92
Figura 4.2: Topologia do controlador Backstepping-Sliding Mode em malha fechada.
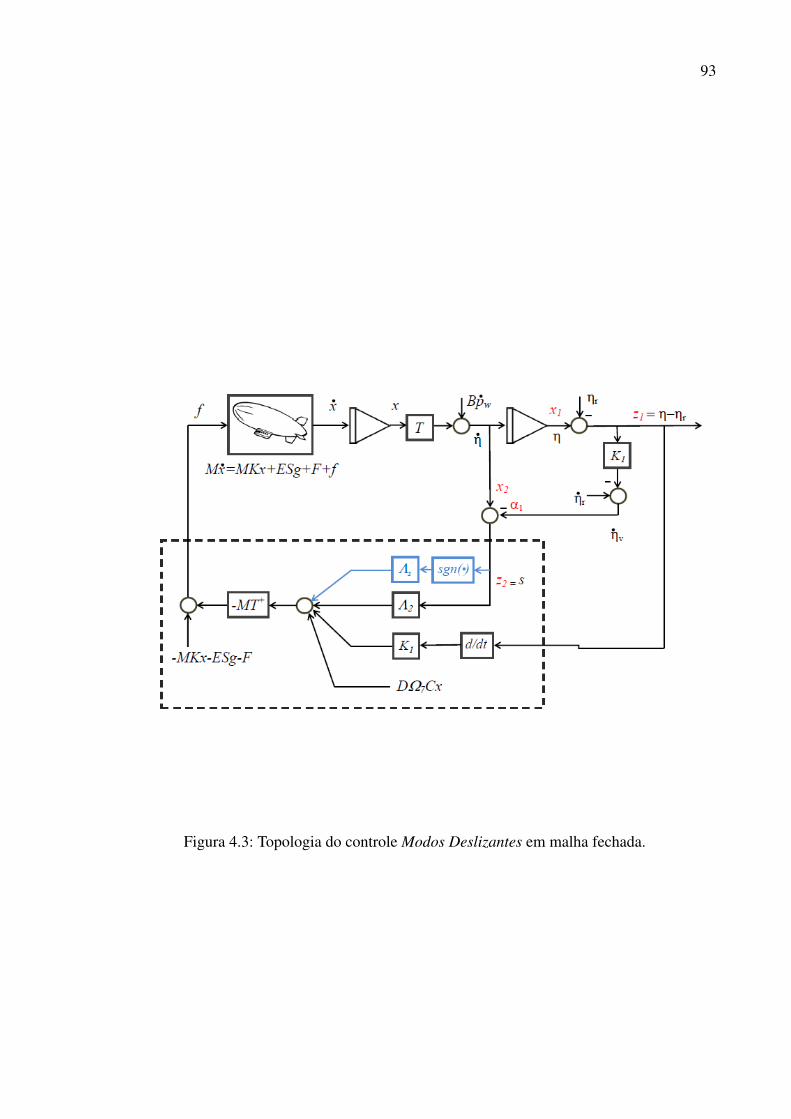
93
Figura 4.3: Topologia do controle Modos Deslizantes em malha fechada.
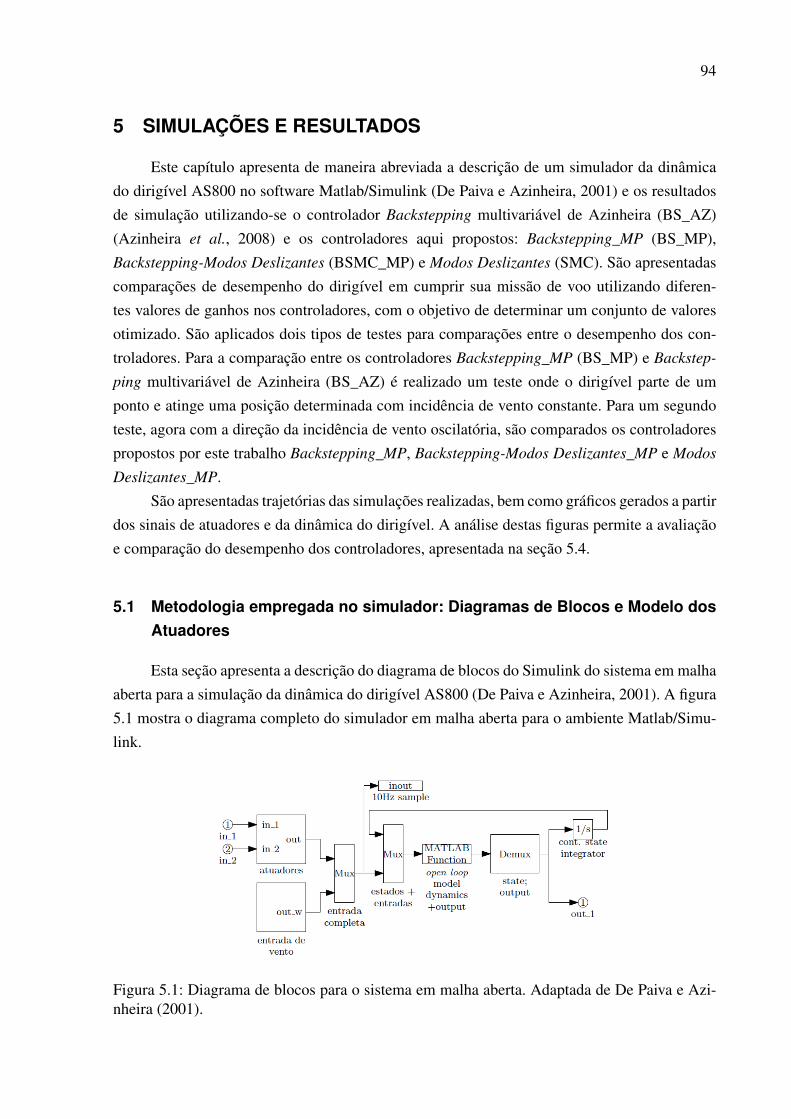
94
5 SIMULAÇÕES E RESULTADOS
Este capítulo apresenta de maneira abreviada a descrição de um simulador da dinâmicado dirigível AS800 no software Matlab/Simulink (De Paiva e Azinheira, 2001) e os resultadosde simulação utilizando-se o controlador Backstepping multivariável de Azinheira (BS_AZ)(Azinheira et al., 2008) e os controladores aqui propostos: Backstepping_MP (BS_MP),Backstepping-Modos Deslizantes (BSMC_MP) e Modos Deslizantes (SMC). São apresentadascomparações de desempenho do dirigível em cumprir sua missão de voo utilizando diferen-tes valores de ganhos nos controladores, com o objetivo de determinar um conjunto de valoresotimizado. São aplicados dois tipos de testes para comparações entre o desempenho dos con-troladores. Para a comparação entre os controladores Backstepping_MP (BS_MP) e Backstep-
ping multivariável de Azinheira (BS_AZ) é realizado um teste onde o dirigível parte de umponto e atinge uma posição determinada com incidência de vento constante. Para um segundoteste, agora com a direção da incidência de vento oscilatória, são comparados os controladorespropostos por este trabalho Backstepping_MP, Backstepping-Modos Deslizantes_MP e Modos
Deslizantes_MP.São apresentadas trajetórias das simulações realizadas, bem como gráficos gerados a partir
dos sinais de atuadores e da dinâmica do dirigível. A análise destas figuras permite a avaliaçãoe comparação do desempenho dos controladores, apresentada na seção 5.4.
5.1 Metodologia empregada no simulador: Diagramas de Blocos e Modelo dosAtuadores
Esta seção apresenta a descrição do diagrama de blocos do Simulink do sistema em malhaaberta para a simulação da dinâmica do dirigível AS800 (De Paiva e Azinheira, 2001). A figura5.1 mostra o diagrama completo do simulador em malha aberta para o ambiente Matlab/Simu-link.
Figura 5.1: Diagrama de blocos para o sistema em malha aberta. Adaptada de De Paiva e Azi-nheira (2001).
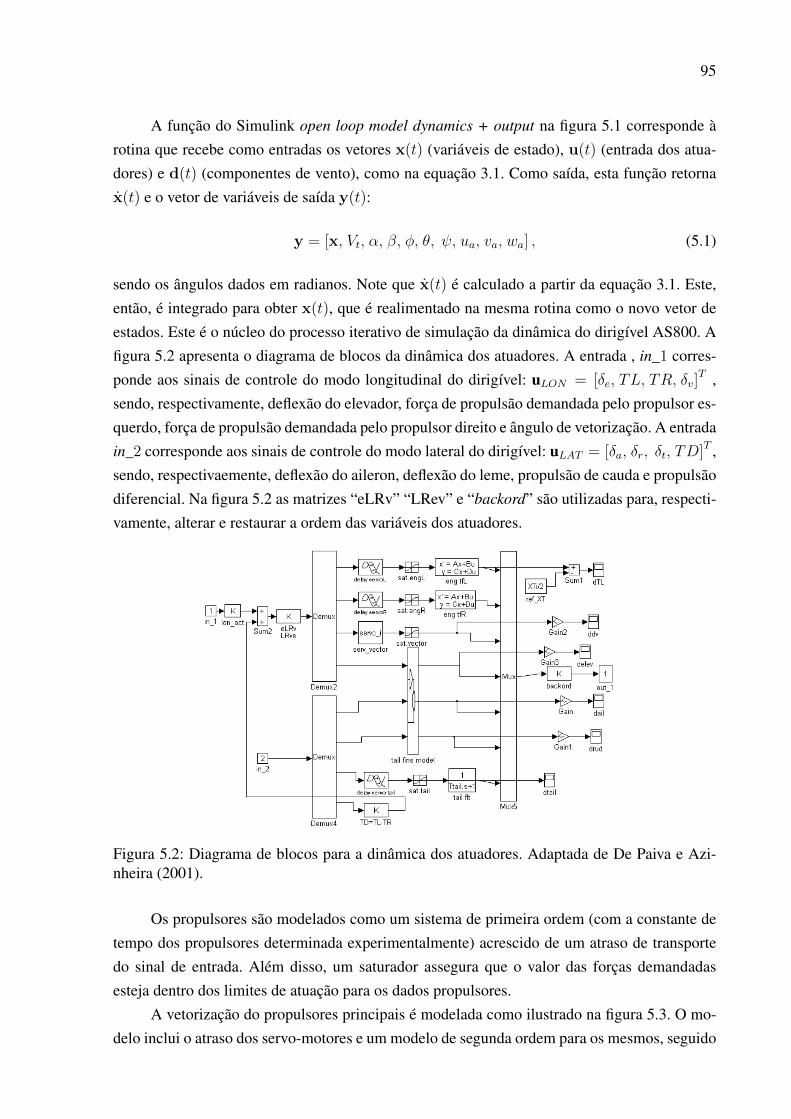
95
A função do Simulink open loop model dynamics + output na figura 5.1 corresponde àrotina que recebe como entradas os vetores x(𝑡) (variáveis de estado), u(𝑡) (entrada dos atua-dores) e d(𝑡) (componentes de vento), como na equação 3.1. Como saída, esta função retornax(𝑡) e o vetor de variáveis de saída y(𝑡):
y = [x, 𝑉𝑡, 𝛼, 𝛽, 𝜑, 𝜃, 𝜓, 𝑢𝑎, 𝑣𝑎, 𝑤𝑎] , (5.1)
sendo os ângulos dados em radianos. Note que x(𝑡) é calculado a partir da equação 3.1. Este,então, é integrado para obter x(𝑡), que é realimentado na mesma rotina como o novo vetor deestados. Este é o núcleo do processo iterativo de simulação da dinâmica do dirigível AS800. Afigura 5.2 apresenta o diagrama de blocos da dinâmica dos atuadores. A entrada , in_1 corres-ponde aos sinais de controle do modo longitudinal do dirigível: u𝐿𝑂𝑁 = [𝛿𝑒, 𝑇𝐿, 𝑇𝑅, 𝛿𝑣]
𝑇 ,sendo, respectivamente, deflexão do elevador, força de propulsão demandada pelo propulsor es-querdo, força de propulsão demandada pelo propulsor direito e ângulo de vetorização. A entradain_2 corresponde aos sinais de controle do modo lateral do dirigível: u𝐿𝐴𝑇 = [𝛿𝑎, 𝛿𝑟, 𝛿𝑡, 𝑇𝐷]𝑇 ,sendo, respectivaemente, deflexão do aileron, deflexão do leme, propulsão de cauda e propulsãodiferencial. Na figura 5.2 as matrizes “eLRv” “LRev” e “backord” são utilizadas para, respecti-vamente, alterar e restaurar a ordem das variáveis dos atuadores.
Figura 5.2: Diagrama de blocos para a dinâmica dos atuadores. Adaptada de De Paiva e Azi-nheira (2001).
Os propulsores são modelados como um sistema de primeira ordem (com a constante detempo dos propulsores determinada experimentalmente) acrescido de um atraso de transportedo sinal de entrada. Além disso, um saturador assegura que o valor das forças demandadasesteja dentro dos limites de atuação para os dados propulsores.
A vetorização do propulsores principais é modelada como ilustrado na figura 5.3. O mo-delo inclui o atraso dos servo-motores e um modelo de segunda ordem para os mesmos, seguido
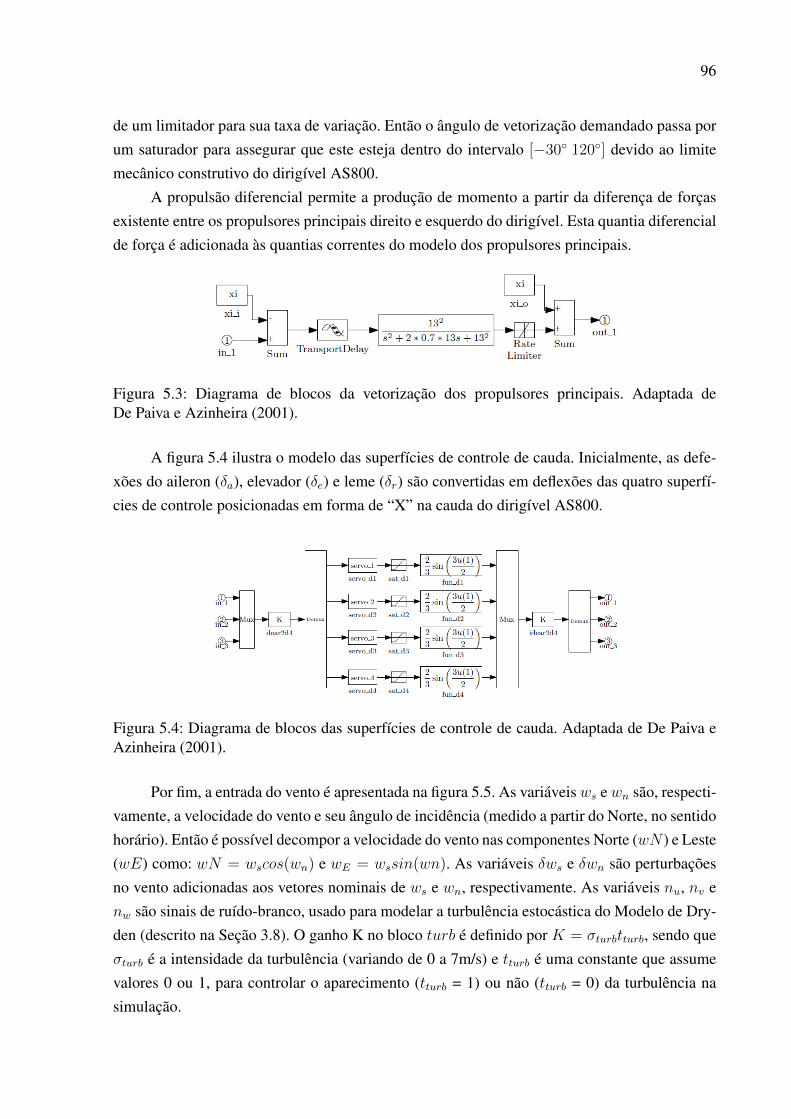
96
de um limitador para sua taxa de variação. Então o ângulo de vetorização demandado passa porum saturador para assegurar que este esteja dentro do intervalo [−30∘ 120∘] devido ao limitemecânico construtivo do dirigível AS800.
A propulsão diferencial permite a produção de momento a partir da diferença de forçasexistente entre os propulsores principais direito e esquerdo do dirigível. Esta quantia diferencialde força é adicionada às quantias correntes do modelo dos propulsores principais.
Figura 5.3: Diagrama de blocos da vetorização dos propulsores principais. Adaptada deDe Paiva e Azinheira (2001).
A figura 5.4 ilustra o modelo das superfícies de controle de cauda. Inicialmente, as defe-xões do aileron (𝛿𝑎), elevador (𝛿𝑒) e leme (𝛿𝑟) são convertidas em deflexões das quatro superfí-cies de controle posicionadas em forma de “X” na cauda do dirigível AS800.
Figura 5.4: Diagrama de blocos das superfícies de controle de cauda. Adaptada de De Paiva eAzinheira (2001).
Por fim, a entrada do vento é apresentada na figura 5.5. As variáveis 𝑤𝑠 e 𝑤𝑛 são, respecti-vamente, a velocidade do vento e seu ângulo de incidência (medido a partir do Norte, no sentidohorário). Então é possível decompor a velocidade do vento nas componentes Norte (𝑤𝑁 ) e Leste(𝑤𝐸) como: 𝑤𝑁 = 𝑤𝑠𝑐𝑜𝑠(𝑤𝑛) e 𝑤𝐸 = 𝑤𝑠𝑠𝑖𝑛(𝑤𝑛). As variáveis 𝛿𝑤𝑠 e 𝛿𝑤𝑛 são perturbaçõesno vento adicionadas aos vetores nominais de 𝑤𝑠 e 𝑤𝑛, respectivamente. As variáveis 𝑛𝑢, 𝑛𝑣 e𝑛𝑤 são sinais de ruído-branco, usado para modelar a turbulência estocástica do Modelo de Dry-den (descrito na Seção 3.8). O ganho K no bloco 𝑡𝑢𝑟𝑏 é definido por 𝐾 = 𝜎𝑡𝑢𝑟𝑏𝑡𝑡𝑢𝑟𝑏, sendo que𝜎𝑡𝑢𝑟𝑏 é a intensidade da turbulência (variando de 0 a 7m/s) e 𝑡𝑡𝑢𝑟𝑏 é uma constante que assumevalores 0 ou 1, para controlar o aparecimento (𝑡𝑡𝑢𝑟𝑏 = 1) ou não (𝑡𝑡𝑢𝑟𝑏 = 0) da turbulência nasimulação.
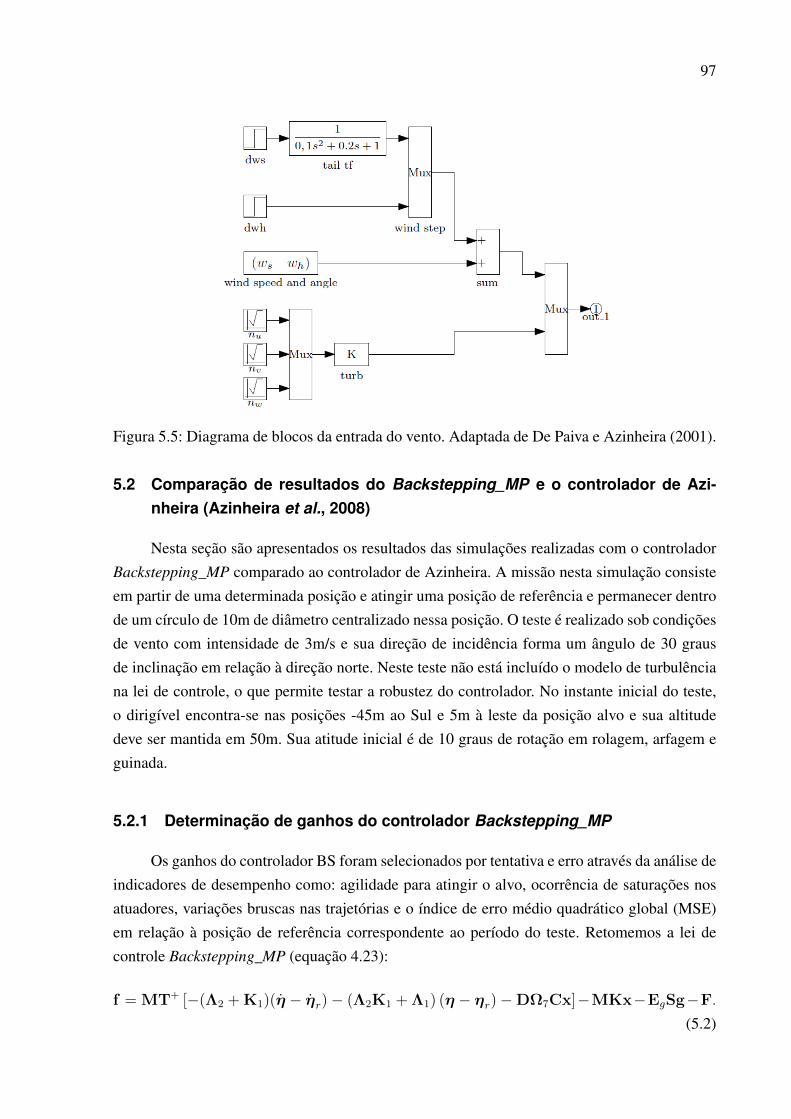
97
Figura 5.5: Diagrama de blocos da entrada do vento. Adaptada de De Paiva e Azinheira (2001).
5.2 Comparação de resultados do Backstepping_MP e o controlador de Azi-nheira (Azinheira et al., 2008)
Nesta seção são apresentados os resultados das simulações realizadas com o controladorBackstepping_MP comparado ao controlador de Azinheira. A missão nesta simulação consisteem partir de uma determinada posição e atingir uma posição de referência e permanecer dentrode um círculo de 10m de diâmetro centralizado nessa posição. O teste é realizado sob condiçõesde vento com intensidade de 3m/s e sua direção de incidência forma um ângulo de 30 grausde inclinação em relação à direção norte. Neste teste não está incluído o modelo de turbulênciana lei de controle, o que permite testar a robustez do controlador. No instante inicial do teste,o dirigível encontra-se nas posições -45m ao Sul e 5m à leste da posição alvo e sua altitudedeve ser mantida em 50m. Sua atitude inicial é de 10 graus de rotação em rolagem, arfagem eguinada.
5.2.1 Determinação de ganhos do controlador Backstepping_MP
Os ganhos do controlador BS foram selecionados por tentativa e erro através da análise deindicadores de desempenho como: agilidade para atingir o alvo, ocorrência de saturações nosatuadores, variações bruscas nas trajetórias e o índice de erro médio quadrático global (MSE)em relação à posição de referência correspondente ao período do teste. Retomemos a lei decontrole Backstepping_MP (equação 4.23):
f = MT+ [−(Λ2 + K1)( − 𝑟) − (Λ2K1 + Λ1) (𝜂 − 𝜂𝑟) −DΩ7Cx]−MKx−E𝑔Sg−F.
(5.2)
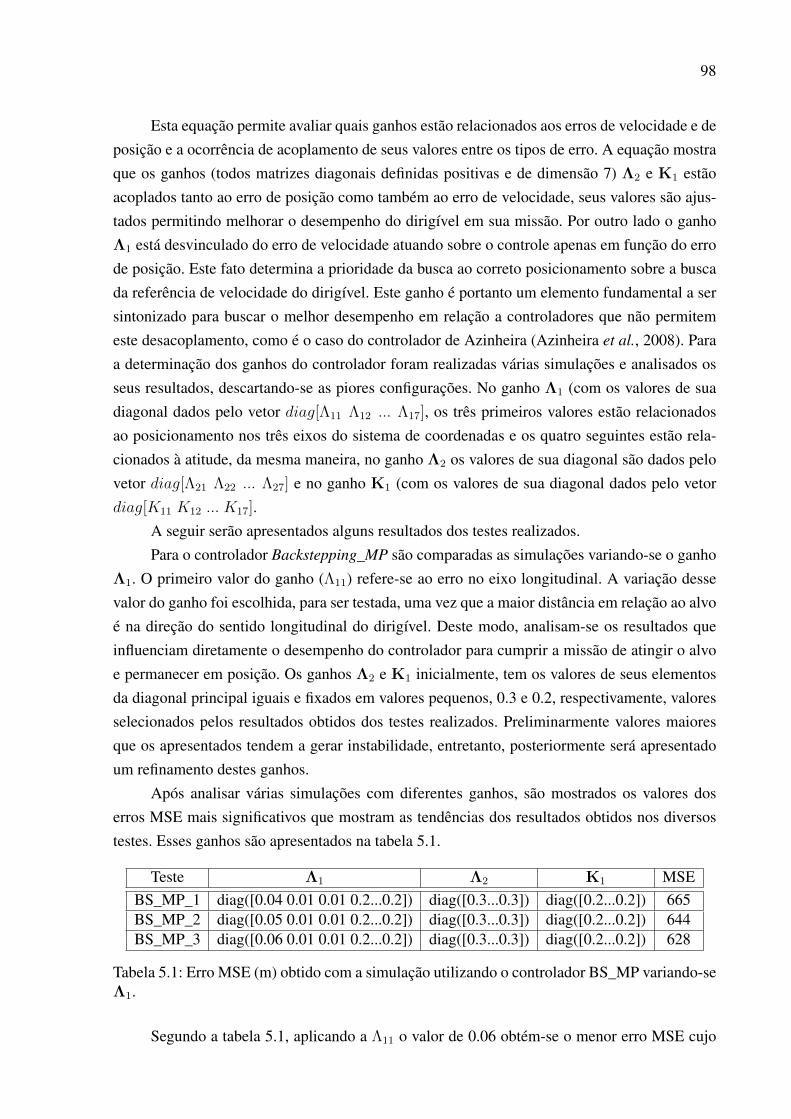
98
Esta equação permite avaliar quais ganhos estão relacionados aos erros de velocidade e deposição e a ocorrência de acoplamento de seus valores entre os tipos de erro. A equação mostraque os ganhos (todos matrizes diagonais definidas positivas e de dimensão 7) Λ2 e K1 estãoacoplados tanto ao erro de posição como também ao erro de velocidade, seus valores são ajus-tados permitindo melhorar o desempenho do dirigível em sua missão. Por outro lado o ganhoΛ1 está desvinculado do erro de velocidade atuando sobre o controle apenas em função do errode posição. Este fato determina a prioridade da busca ao correto posicionamento sobre a buscada referência de velocidade do dirigível. Este ganho é portanto um elemento fundamental a sersintonizado para buscar o melhor desempenho em relação a controladores que não permitemeste desacoplamento, como é o caso do controlador de Azinheira (Azinheira et al., 2008). Paraa determinação dos ganhos do controlador foram realizadas várias simulações e analisados osseus resultados, descartando-se as piores configurações. No ganho Λ1 (com os valores de suadiagonal dados pelo vetor 𝑑𝑖𝑎𝑔[Λ11 Λ12 ... Λ17], os três primeiros valores estão relacionadosao posicionamento nos três eixos do sistema de coordenadas e os quatro seguintes estão rela-cionados à atitude, da mesma maneira, no ganho Λ2 os valores de sua diagonal são dados pelovetor 𝑑𝑖𝑎𝑔[Λ21 Λ22 ... Λ27] e no ganho K1 (com os valores de sua diagonal dados pelo vetor𝑑𝑖𝑎𝑔[𝐾11 𝐾12 ... 𝐾17].
A seguir serão apresentados alguns resultados dos testes realizados.Para o controlador Backstepping_MP são comparadas as simulações variando-se o ganho
Λ1. O primeiro valor do ganho (Λ11) refere-se ao erro no eixo longitudinal. A variação dessevalor do ganho foi escolhida, para ser testada, uma vez que a maior distância em relação ao alvoé na direção do sentido longitudinal do dirigível. Deste modo, analisam-se os resultados queinfluenciam diretamente o desempenho do controlador para cumprir a missão de atingir o alvoe permanecer em posição. Os ganhos Λ2 e K1 inicialmente, tem os valores de seus elementosda diagonal principal iguais e fixados em valores pequenos, 0.3 e 0.2, respectivamente, valoresselecionados pelos resultados obtidos dos testes realizados. Preliminarmente valores maioresque os apresentados tendem a gerar instabilidade, entretanto, posteriormente será apresentadoum refinamento destes ganhos.
Após analisar várias simulações com diferentes ganhos, são mostrados os valores doserros MSE mais significativos que mostram as tendências dos resultados obtidos nos diversostestes. Esses ganhos são apresentados na tabela 5.1.
Teste Λ1 Λ2 K1 MSEBS_MP_1 diag([0.04 0.01 0.01 0.2...0.2]) diag([0.3...0.3]) diag([0.2...0.2]) 665BS_MP_2 diag([0.05 0.01 0.01 0.2...0.2]) diag([0.3...0.3]) diag([0.2...0.2]) 644BS_MP_3 diag([0.06 0.01 0.01 0.2...0.2]) diag([0.3...0.3]) diag([0.2...0.2]) 628
Tabela 5.1: Erro MSE (m) obtido com a simulação utilizando o controlador BS_MP variando-seΛ1.
Segundo a tabela 5.1, aplicando a Λ11 o valor de 0.06 obtém-se o menor erro MSE cujo
99
valor é de 628m. Verifica-se também que a maior diminuição entre os valores de erro MSEestá entre os testes BS_MP_1 e BS_MP_2, segundo os resultados dos testes realizados há umatendência dessa diminuição torna-se menos expressiva com a diminuição do valor de Λ11. Ovalor do erro MSE é um fator importante para a seleção dos ganhos do controlador, mas outrosfatores serão considerados como as trajetórias e ação dos atuadores que serão apresentados aseguir.
As trajetórias dos casos BS_MP_1, BS_MP_2 e BS_MP_3 apresentados pela tabela 5.1podem ser vistas nas figuras 5.6, 5.7 e 5.8 respectivamente.
Nessas figuras os desenhos representando o dirigível são usados para mostrar o seu posi-cionamento em intervalos de tempo de 3s. A cor dos desenhos, inicialmente azul, vai mudandode tonalidade até a cor vermelha para auxiliar na visualização da trajetória desenvolvida pelodirigível e a última posição do teste tem a cor preta. O círculo centralizado na posição da ori-gem, representa o alvo com diâmetro de 10m. A figura 5.6 apresenta uma trajetória suave edireta, porém o valor do erro medido nesta simulação é o maior entre os testes apresentados. Ostestes BS_MP_2 e BS_MP_3 apresentam um desempenho semelhante atingindo rapidamente aposição alvo na direção norte e posterior deslocamento lateral para o centro.
Para determinar o melhor valor para os ganhos deve-se observar o comportamento dossinais do controlador usados para a missão.
Os gráficos apresentados nas figuras 5.9, 5.10 e 5.11, se referem aos três testes realizados,BS_MP_1, BS_MP_2 e BS_MP_3, respectivamente. Eles apresentam os sinais dos atuadores,bem como dados do posicionamento e outras variáveis do dirigível ao longo do período dassimulações. Verifica-se que os sinais são muito semelhantes, com as maiores diferenças entreos valores de ângulos de ataque (𝛼), na variação de altitude (h) e no posicionamento longitu-dinal (PN). Observando-se o gráfico da posição norte (PN) pode-se verificar o tempo que cadasimulação leva para atingir o alvo. No teste BS_MP_1 (figura 5.9), esse tempo é de aproxima-damente 20s, enquanto os outros testes BS_MP_2 e BS_MP_3 apresentados nas figuras 5.10e 5.11, necessitam aproximadamente da metade desse tempo, ou seja um pouco mais de 10s.O primeiro valor da diagonal de Λ1 (Λ11), relacionado à velocidade longitudinal, determina arapidez em atingir o alvo. Utilizando-se o controlador BS_MP_3 que tem Λ11 = 0.06 (maior va-lor) atinge-se o alvo mais rapidamente e o inverso ocorre com a altitude com o melhor resultadocom o controlador Λ11 = 0.04 (valor menor).
Os sinais dos atuadores se mostram capazes de controlar o dirigível em todos os testesapresentados, sem atingir níveis de saturação indesejáveis, porém, o comportamento da variaçãode altitude no início dos testes em alguns casos tem valores muito elevados. Isto se deve ao fatoda atitude inicial do dirigível ter seus ângulos diferentes de zero (situação proposital que servepara testar a robustez do controlador).
A tabela 5.2 mostra os valores da variação de altitude e o intervalo de tempo de duraçãodessa variação nos testes.
Analisando-se a tabela 5.2, nota-se as menores variações da altitude nos testes com meno-
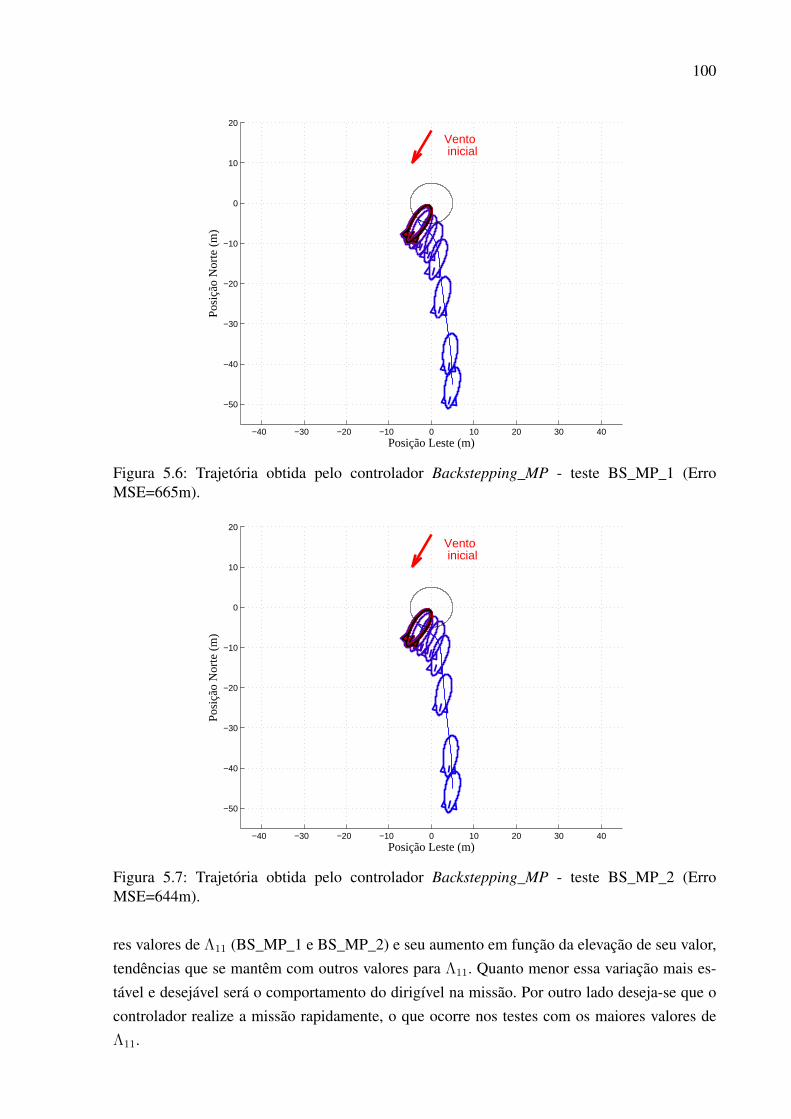
100
−40 −30 −20 −10 0 10 20 30 40
−50
−40
−30
−20
−10
0
10
20
Vento inicial
Posição Leste (m)
Pos
ição
Nor
te (
m)
Figura 5.6: Trajetória obtida pelo controlador Backstepping_MP - teste BS_MP_1 (ErroMSE=665m).
−40 −30 −20 −10 0 10 20 30 40
−50
−40
−30
−20
−10
0
10
20
Vento inicial
Posição Leste (m)
Pos
ição
Nor
te (
m)
Figura 5.7: Trajetória obtida pelo controlador Backstepping_MP - teste BS_MP_2 (ErroMSE=644m).
res valores de Λ11 (BS_MP_1 e BS_MP_2) e seu aumento em função da elevação de seu valor,tendências que se mantêm com outros valores para Λ11. Quanto menor essa variação mais es-tável e desejável será o comportamento do dirigível na missão. Por outro lado deseja-se que ocontrolador realize a missão rapidamente, o que ocorre nos testes com os maiores valores deΛ11.
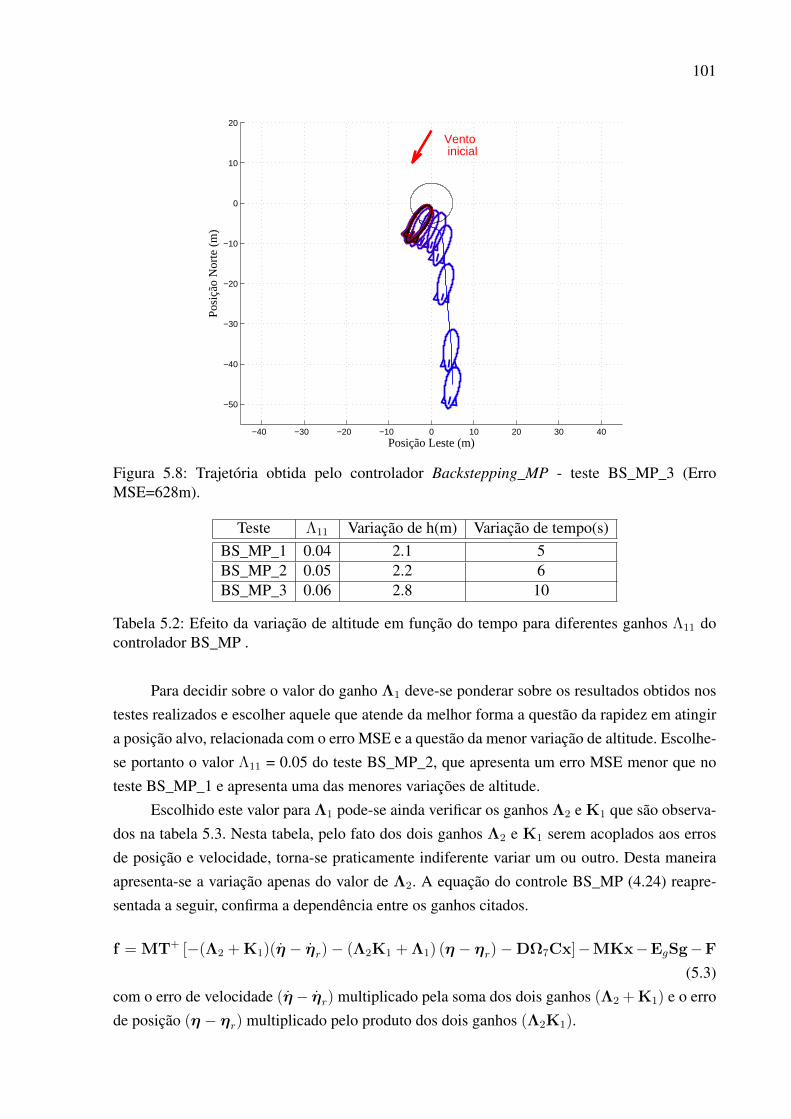
101
−40 −30 −20 −10 0 10 20 30 40
−50
−40
−30
−20
−10
0
10
20
Vento inicial
Posição Leste (m)
Pos
ição
Nor
te (
m)
Figura 5.8: Trajetória obtida pelo controlador Backstepping_MP - teste BS_MP_3 (ErroMSE=628m).
Teste Λ11 Variação de h(m) Variação de tempo(s)BS_MP_1 0.04 2.1 5BS_MP_2 0.05 2.2 6BS_MP_3 0.06 2.8 10
Tabela 5.2: Efeito da variação de altitude em função do tempo para diferentes ganhos Λ11 docontrolador BS_MP .
Para decidir sobre o valor do ganho Λ1 deve-se ponderar sobre os resultados obtidos nostestes realizados e escolher aquele que atende da melhor forma a questão da rapidez em atingira posição alvo, relacionada com o erro MSE e a questão da menor variação de altitude. Escolhe-se portanto o valor Λ11 = 0.05 do teste BS_MP_2, que apresenta um erro MSE menor que noteste BS_MP_1 e apresenta uma das menores variações de altitude.
Escolhido este valor para Λ1 pode-se ainda verificar os ganhos Λ2 e K1 que são observa-dos na tabela 5.3. Nesta tabela, pelo fato dos dois ganhos Λ2 e K1 serem acoplados aos errosde posição e velocidade, torna-se praticamente indiferente variar um ou outro. Desta maneiraapresenta-se a variação apenas do valor de Λ2. A equação do controle BS_MP (4.24) reapre-sentada a seguir, confirma a dependência entre os ganhos citados.
f = MT+ [−(Λ2 + K1)( − 𝑟) − (Λ2K1 + Λ1) (𝜂 − 𝜂𝑟) −DΩ7Cx]−MKx−E𝑔Sg−F
(5.3)com o erro de velocidade (− 𝑟) multiplicado pela soma dos dois ganhos (Λ2 +K1) e o errode posição (𝜂 − 𝜂𝑟) multiplicado pelo produto dos dois ganhos (Λ2K1).
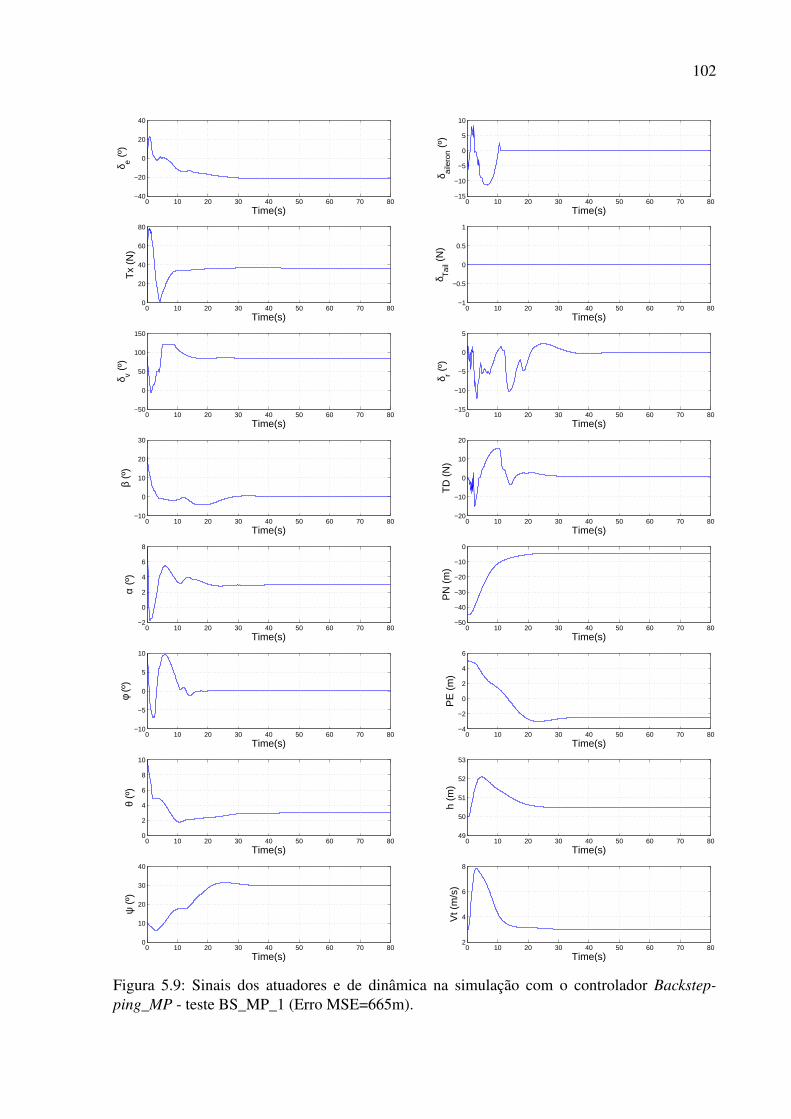
102
0 10 20 30 40 50 60 70 80−40
−20
0
20
40
Time(s)
δ e (º)
0 10 20 30 40 50 60 70 800
20
40
60
80
Time(s)
Tx
(N)
0 10 20 30 40 50 60 70 80−50
0
50
100
150
Time(s)
δ v (º)
0 10 20 30 40 50 60 70 80−15
−10
−5
0
5
10
Time(s)
δ aile
ron (
º)
0 10 20 30 40 50 60 70 80−1
−0.5
0
0.5
1
Time(s)
δ Tai
l (N
)
0 10 20 30 40 50 60 70 80−15
−10
−5
0
5
Time(s)
δ r (º)
0 10 20 30 40 50 60 70 80−10
0
10
20
30
Time(s)
β (º
)
0 10 20 30 40 50 60 70 80−2
0
2
4
6
8
Time(s)
α (º
)
0 10 20 30 40 50 60 70 80−20
−10
0
10
20
Time(s)
TD
(N
)
0 10 20 30 40 50 60 70 80−10
−5
0
5
10
Time(s)
φ (º
)
0 10 20 30 40 50 60 70 800
2
4
6
8
10
Time(s)
θ (º
)
0 10 20 30 40 50 60 70 800
10
20
30
40
Time(s)
ψ (
º)
0 10 20 30 40 50 60 70 8049
50
51
52
53
Time(s)
h (m
)
0 10 20 30 40 50 60 70 80−4
−2
0
2
4
6
Time(s)
PE
(m
)
0 10 20 30 40 50 60 70 80−50
−40
−30
−20
−10
0
Time(s)
PN
(m
)
0 10 20 30 40 50 60 70 802
4
6
8
Time(s)
Vt (
m/s
)
Figura 5.9: Sinais dos atuadores e de dinâmica na simulação com o controlador Backstep-ping_MP - teste BS_MP_1 (Erro MSE=665m).
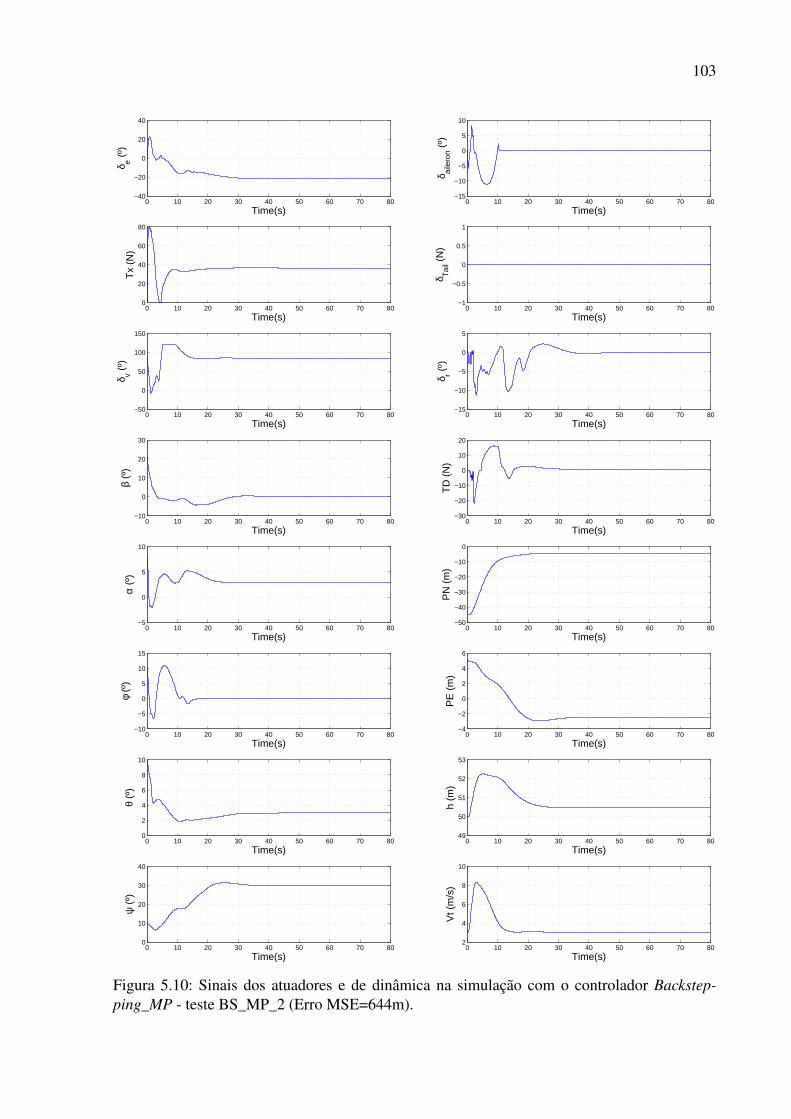
103
0 10 20 30 40 50 60 70 80−40
−20
0
20
40
Time(s)
δ e (º)
0 10 20 30 40 50 60 70 800
20
40
60
80
Time(s)
Tx
(N)
0 10 20 30 40 50 60 70 80−50
0
50
100
150
Time(s)
δ v (º)
0 10 20 30 40 50 60 70 80−15
−10
−5
0
5
10
Time(s)
δ aile
ron (
º)
0 10 20 30 40 50 60 70 80−1
−0.5
0
0.5
1
Time(s)
δ Tai
l (N
)
0 10 20 30 40 50 60 70 80−15
−10
−5
0
5
Time(s)
δ r (º)
0 10 20 30 40 50 60 70 80−10
0
10
20
30
Time(s)
β (º
)
0 10 20 30 40 50 60 70 80−5
0
5
10
Time(s)
α (º
)
0 10 20 30 40 50 60 70 80−30
−20
−10
0
10
20
Time(s)
TD
(N
)
0 10 20 30 40 50 60 70 80−10
−5
0
5
10
15
Time(s)
φ (º
)
0 10 20 30 40 50 60 70 800
2
4
6
8
10
Time(s)
θ (º
)
0 10 20 30 40 50 60 70 800
10
20
30
40
Time(s)
ψ (
º)
0 10 20 30 40 50 60 70 8049
50
51
52
53
Time(s)
h (m
)
0 10 20 30 40 50 60 70 80−4
−2
0
2
4
6
Time(s)
PE
(m
)
0 10 20 30 40 50 60 70 80−50
−40
−30
−20
−10
0
Time(s)
PN
(m
)
0 10 20 30 40 50 60 70 802
4
6
8
10
Time(s)
Vt (
m/s
)
Figura 5.10: Sinais dos atuadores e de dinâmica na simulação com o controlador Backstep-ping_MP - teste BS_MP_2 (Erro MSE=644m).
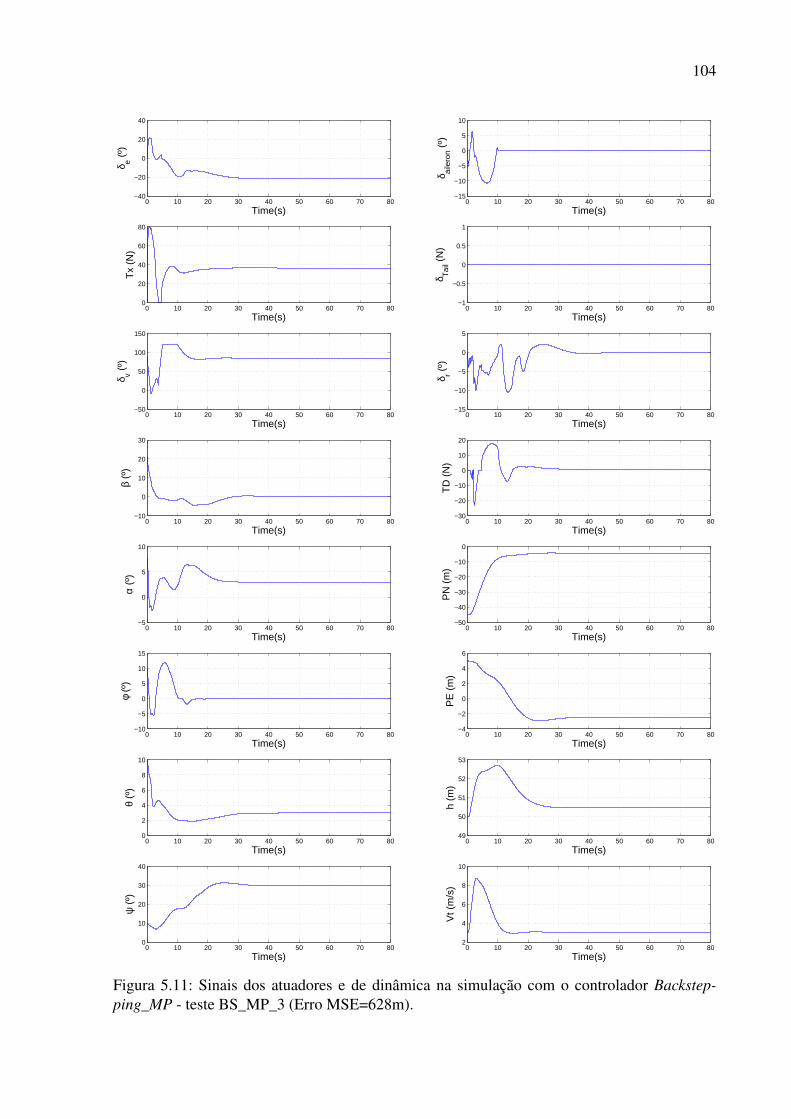
104
0 10 20 30 40 50 60 70 80−40
−20
0
20
40
Time(s)
δ e (º)
0 10 20 30 40 50 60 70 800
20
40
60
80
Time(s)
Tx
(N)
0 10 20 30 40 50 60 70 80−50
0
50
100
150
Time(s)
δ v (º)
0 10 20 30 40 50 60 70 80−15
−10
−5
0
5
10
Time(s)
δ aile
ron (
º)
0 10 20 30 40 50 60 70 80−1
−0.5
0
0.5
1
Time(s)
δ Tai
l (N
)
0 10 20 30 40 50 60 70 80−15
−10
−5
0
5
Time(s)
δ r (º)
0 10 20 30 40 50 60 70 80−10
0
10
20
30
Time(s)
β (º
)
0 10 20 30 40 50 60 70 80−5
0
5
10
Time(s)
α (º
)
0 10 20 30 40 50 60 70 80−30
−20
−10
0
10
20
Time(s)
TD
(N
)
0 10 20 30 40 50 60 70 80−10
−5
0
5
10
15
Time(s)
φ (º
)
0 10 20 30 40 50 60 70 800
2
4
6
8
10
Time(s)
θ (º
)
0 10 20 30 40 50 60 70 800
10
20
30
40
Time(s)
ψ (
º)
0 10 20 30 40 50 60 70 8049
50
51
52
53
Time(s)
h (m
)
0 10 20 30 40 50 60 70 80−4
−2
0
2
4
6
Time(s)
PE
(m
)
0 10 20 30 40 50 60 70 80−50
−40
−30
−20
−10
0
Time(s)
PN
(m
)
0 10 20 30 40 50 60 70 802
4
6
8
10
Time(s)
Vt (
m/s
)
Figura 5.11: Sinais dos atuadores e de dinâmica na simulação com o controlador Backstep-ping_MP - teste BS_MP_3 (Erro MSE=628m).
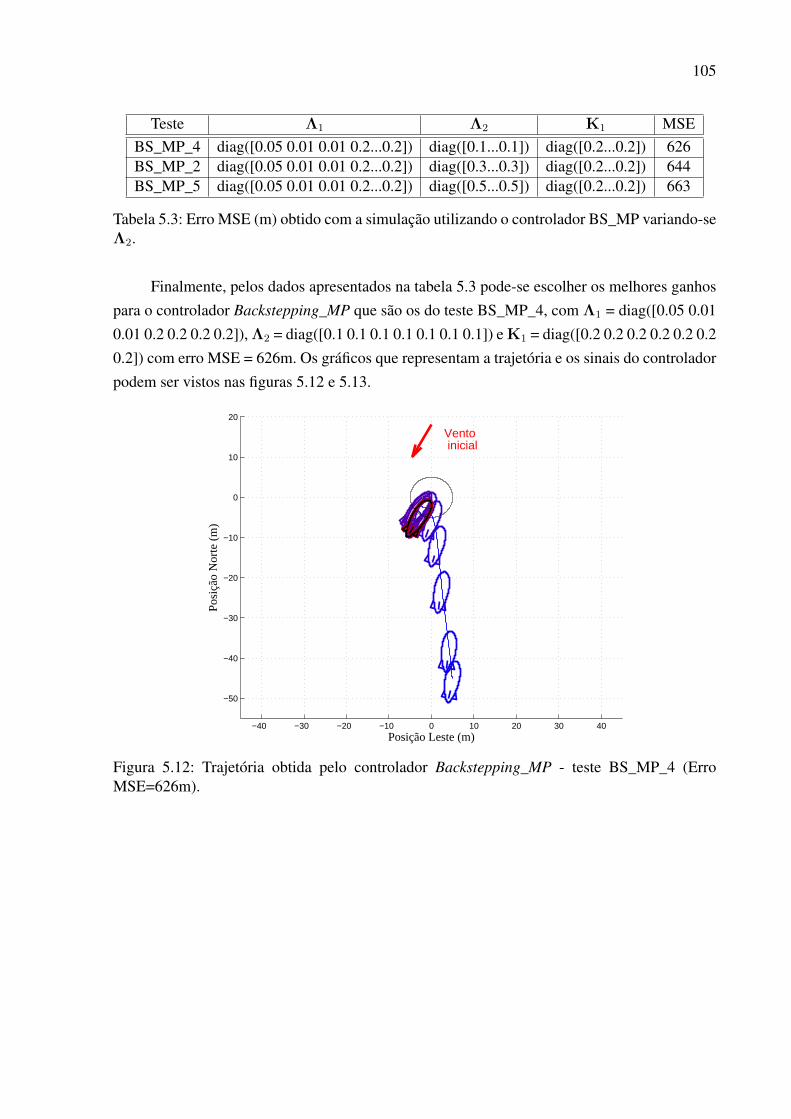
105
Teste Λ1 Λ2 K1 MSEBS_MP_4 diag([0.05 0.01 0.01 0.2...0.2]) diag([0.1...0.1]) diag([0.2...0.2]) 626BS_MP_2 diag([0.05 0.01 0.01 0.2...0.2]) diag([0.3...0.3]) diag([0.2...0.2]) 644BS_MP_5 diag([0.05 0.01 0.01 0.2...0.2]) diag([0.5...0.5]) diag([0.2...0.2]) 663
Tabela 5.3: Erro MSE (m) obtido com a simulação utilizando o controlador BS_MP variando-seΛ2.
Finalmente, pelos dados apresentados na tabela 5.3 pode-se escolher os melhores ganhospara o controlador Backstepping_MP que são os do teste BS_MP_4, com Λ1 = diag([0.05 0.010.01 0.2 0.2 0.2 0.2]), Λ2 = diag([0.1 0.1 0.1 0.1 0.1 0.1 0.1]) e K1 = diag([0.2 0.2 0.2 0.2 0.2 0.20.2]) com erro MSE = 626m. Os gráficos que representam a trajetória e os sinais do controladorpodem ser vistos nas figuras 5.12 e 5.13.
−40 −30 −20 −10 0 10 20 30 40
−50
−40
−30
−20
−10
0
10
20
Vento inicial
Posição Leste (m)
Pos
ição
Nor
te (
m)
Figura 5.12: Trajetória obtida pelo controlador Backstepping_MP - teste BS_MP_4 (ErroMSE=626m).
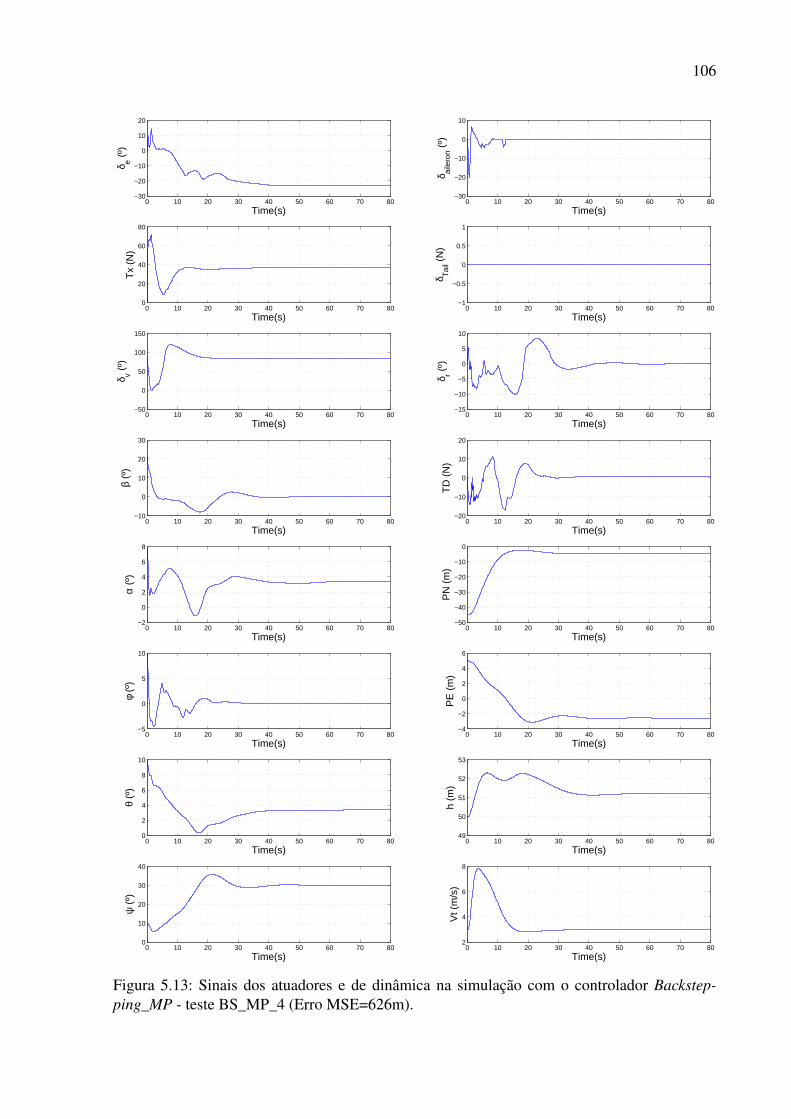
106
0 10 20 30 40 50 60 70 80−30
−20
−10
0
10
20
Time(s)
δ e (º)
0 10 20 30 40 50 60 70 800
20
40
60
80
Time(s)
Tx
(N)
0 10 20 30 40 50 60 70 80−50
0
50
100
150
Time(s)
δ v (º)
0 10 20 30 40 50 60 70 80−30
−20
−10
0
10
Time(s)
δ aile
ron (
º)
0 10 20 30 40 50 60 70 80−1
−0.5
0
0.5
1
Time(s)
δ Tai
l (N
)
0 10 20 30 40 50 60 70 80−15
−10
−5
0
5
10
Time(s)
δ r (º)
0 10 20 30 40 50 60 70 80−10
0
10
20
30
Time(s)
β (º
)
0 10 20 30 40 50 60 70 80−2
0
2
4
6
8
Time(s)
α (º
)
0 10 20 30 40 50 60 70 80−20
−10
0
10
20
Time(s)
TD
(N
)
0 10 20 30 40 50 60 70 80−5
0
5
10
Time(s)
φ (º
)
0 10 20 30 40 50 60 70 800
2
4
6
8
10
Time(s)
θ (º
)
0 10 20 30 40 50 60 70 800
10
20
30
40
Time(s)
ψ (
º)
0 10 20 30 40 50 60 70 8049
50
51
52
53
Time(s)
h (m
)
0 10 20 30 40 50 60 70 80−4
−2
0
2
4
6
Time(s)
PE
(m
)
0 10 20 30 40 50 60 70 80−50
−40
−30
−20
−10
0
Time(s)
PN
(m
)
0 10 20 30 40 50 60 70 802
4
6
8
Time(s)
Vt (
m/s
)
Figura 5.13: Sinais dos atuadores e de dinâmica na simulação com o controlador Backstep-ping_MP - teste BS_MP_4 (Erro MSE=626m).

107
5.2.2 Desempenho do controlador de Azinheira (Backstepping multivariável)
A lei de controle de Azinheira apresentada em (Azinheira et al., 2008) ao contrário doBackstepping_MP proposto utiliza um ganho Λ𝐴𝑍 acoplado aos valores de erro de posição e develocidade do dirigível em relação à referência.
A seguir será apresentado um resumo do equacionamento de Azinheira, utilizado paraobtenção dos resultados para comparação com o controlador Backstepping_MP proposto poreste trabalho.
As variáveis de controle são definidas com a saída principal do sistema que é o vetor deerro de posição do dirigível, ou y = 𝜂𝑒 = (𝜂 − 𝜂𝑟) ∈ R7. São definidas também duas saídasauxiliares, y1 ∈ R7 e y2 ∈ R7, descritas nas equações 5.4. Essas equações mostram tambéma aplicação de suas derivadas y e y, e um escalar positivo “𝑎”, utilizado como parâmetro deprojeto.
y1 = 𝑎y + y,y2 = y,
⇒
y1 = 𝑎y + y,y2 = y.
(5.4)
A função de Lyapunov utilizada é:
W𝑡 =1
2y𝑇1 y1 +
1
2y𝑇2 y2. (5.5)
Com as variáveis auxiliares y1 e y2 e suas derivadas, e recordando a equação 3.34 obtém-se:
y1 = 𝑎y + y = 𝑎 (𝜂 − 𝜂𝑟) + − 𝑟 = 𝑎 (𝜂 − 𝜂𝑟) + Tx + Bw −T𝑟x𝑟,
y2 = y = − 𝑟 = Tx + Bw −T𝑟x𝑟(5.6)
que são as variáveis utilizadas nas equações para a verifição de Lyapunov.A equação da entrada do controle em força é dada por:
f = −M[A1(T𝑥+ B^p𝑤 −T𝑟𝑥𝑟) + B1(𝜂 − 𝜂𝑟) + Γ1x] − E𝑔Sg − F, (5.7)
com: A1 = T𝑇Δ−27 Λ2
2, B1 = 𝑎T𝑇Δ−27 Λ𝐴𝑍 , onde Δ7 =
[I3 03×4
04×312I4
]=(D𝑇D
)1/2,apresentada anteriormente como equação 3.30 e Γ1 = C𝑇Ω7C + K e com: Λ2
2 =
(𝑎I7 + 2Λ𝐴𝑍).Para verificar o desempenho desse controlador, foram simulados vários valores de ganhos
para a mesma missão aplicada ao contolador Backstepping_MP. Alguns erros MSE obtidos coma variação do ganho do controlador aqui denominado Λ𝐴𝑍 são encontrados na tabela 5.4.
A tabela 5.4 aponta para o menor erro MSE de 1102m do teste BS_AZ2. A trajetóriadesta simulação é apresentada na figura 5.14, bem como os valores de ação dos atuadores eposicionamento são apresentados nos gráficos da figura 5.15.
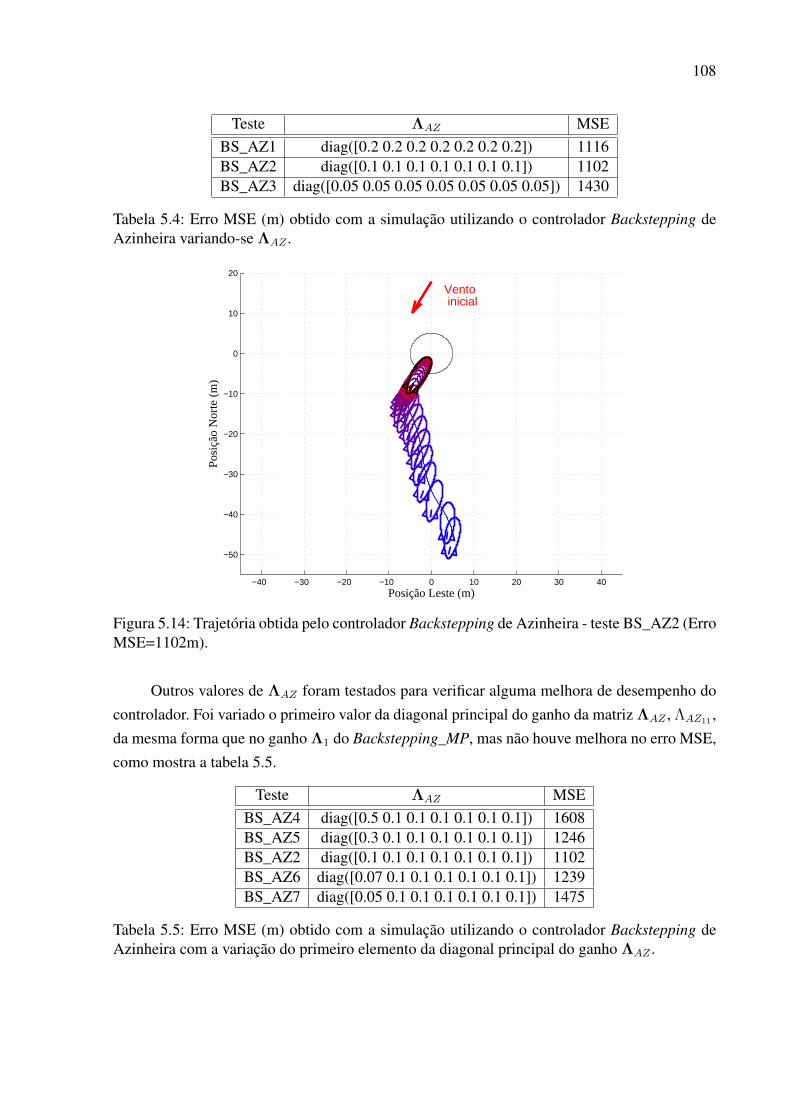
108
Teste Λ𝐴𝑍 MSEBS_AZ1 diag([0.2 0.2 0.2 0.2 0.2 0.2 0.2]) 1116BS_AZ2 diag([0.1 0.1 0.1 0.1 0.1 0.1 0.1]) 1102BS_AZ3 diag([0.05 0.05 0.05 0.05 0.05 0.05 0.05]) 1430
Tabela 5.4: Erro MSE (m) obtido com a simulação utilizando o controlador Backstepping deAzinheira variando-se Λ𝐴𝑍 .
−40 −30 −20 −10 0 10 20 30 40
−50
−40
−30
−20
−10
0
10
20
Vento inicial
Posição Leste (m)
Pos
ição
Nor
te (
m)
Figura 5.14: Trajetória obtida pelo controlador Backstepping de Azinheira - teste BS_AZ2 (ErroMSE=1102m).
Outros valores de Λ𝐴𝑍 foram testados para verificar alguma melhora de desempenho docontrolador. Foi variado o primeiro valor da diagonal principal do ganho da matriz Λ𝐴𝑍 , Λ𝐴𝑍11 ,da mesma forma que no ganho Λ1 do Backstepping_MP, mas não houve melhora no erro MSE,como mostra a tabela 5.5.
Teste Λ𝐴𝑍 MSEBS_AZ4 diag([0.5 0.1 0.1 0.1 0.1 0.1 0.1]) 1608BS_AZ5 diag([0.3 0.1 0.1 0.1 0.1 0.1 0.1]) 1246BS_AZ2 diag([0.1 0.1 0.1 0.1 0.1 0.1 0.1]) 1102BS_AZ6 diag([0.07 0.1 0.1 0.1 0.1 0.1 0.1]) 1239BS_AZ7 diag([0.05 0.1 0.1 0.1 0.1 0.1 0.1]) 1475
Tabela 5.5: Erro MSE (m) obtido com a simulação utilizando o controlador Backstepping deAzinheira com a variação do primeiro elemento da diagonal principal do ganho Λ𝐴𝑍 .
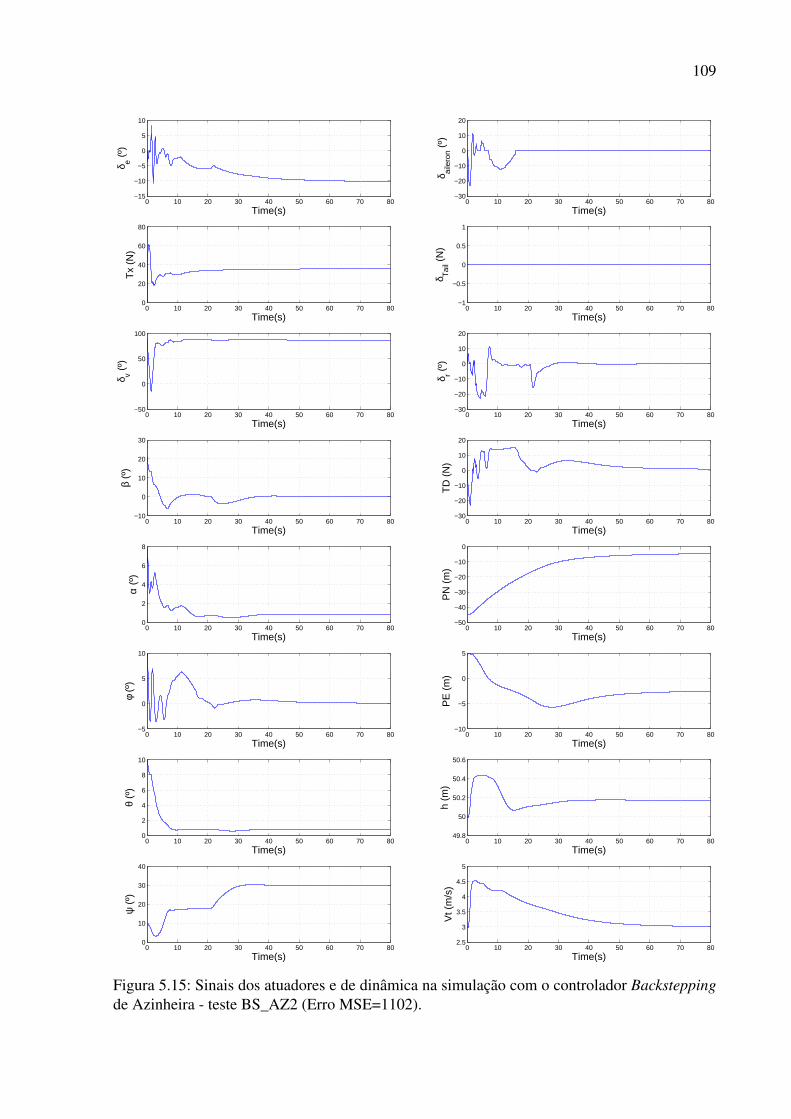
109
0 10 20 30 40 50 60 70 80−15
−10
−5
0
5
10
Time(s)
δ e (º)
0 10 20 30 40 50 60 70 800
20
40
60
80
Time(s)
Tx
(N)
0 10 20 30 40 50 60 70 80−50
0
50
100
Time(s)
δ v (º)
0 10 20 30 40 50 60 70 80−30
−20
−10
0
10
20
Time(s)
δ aile
ron (
º)
0 10 20 30 40 50 60 70 80−1
−0.5
0
0.5
1
Time(s)
δ Tai
l (N
)
0 10 20 30 40 50 60 70 80−30
−20
−10
0
10
20
Time(s)
δ r (º)
0 10 20 30 40 50 60 70 80−10
0
10
20
30
Time(s)
β (º
)
0 10 20 30 40 50 60 70 800
2
4
6
8
Time(s)
α (º
)
0 10 20 30 40 50 60 70 80−30
−20
−10
0
10
20
Time(s)
TD
(N
)
0 10 20 30 40 50 60 70 80−5
0
5
10
Time(s)
φ (º
)
0 10 20 30 40 50 60 70 800
2
4
6
8
10
Time(s)
θ (º
)
0 10 20 30 40 50 60 70 800
10
20
30
40
Time(s)
ψ (
º)
0 10 20 30 40 50 60 70 8049.8
50
50.2
50.4
50.6
Time(s)
h (m
)
0 10 20 30 40 50 60 70 80−10
−5
0
5
Time(s)
PE
(m
)
0 10 20 30 40 50 60 70 80−50
−40
−30
−20
−10
0
Time(s)
PN
(m
)
0 10 20 30 40 50 60 70 802.5
3
3.5
4
4.5
5
Time(s)
Vt (
m/s
)
Figura 5.15: Sinais dos atuadores e de dinâmica na simulação com o controlador Backsteppingde Azinheira - teste BS_AZ2 (Erro MSE=1102).
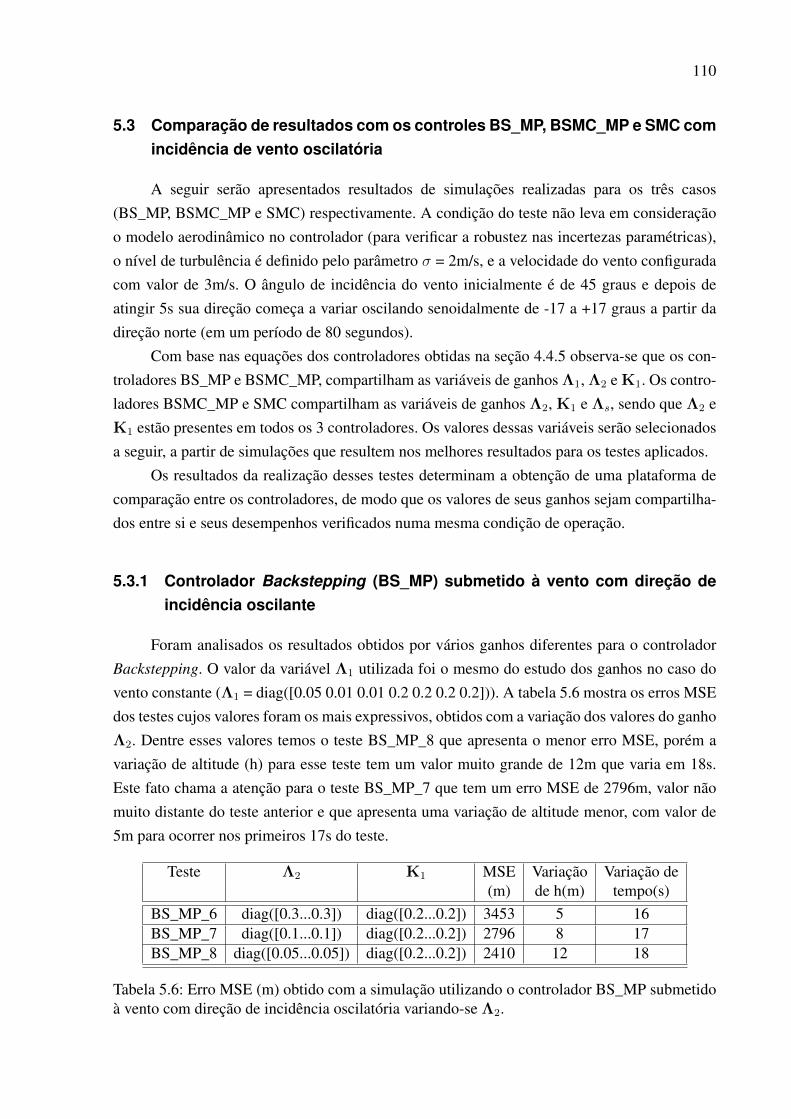
110
5.3 Comparação de resultados com os controles BS_MP, BSMC_MP e SMC comincidência de vento oscilatória
A seguir serão apresentados resultados de simulações realizadas para os três casos(BS_MP, BSMC_MP e SMC) respectivamente. A condição do teste não leva em consideraçãoo modelo aerodinâmico no controlador (para verificar a robustez nas incertezas paramétricas),o nível de turbulência é definido pelo parâmetro 𝜎 = 2m/s, e a velocidade do vento configuradacom valor de 3m/s. O ângulo de incidência do vento inicialmente é de 45 graus e depois deatingir 5s sua direção começa a variar oscilando senoidalmente de -17 a +17 graus a partir dadireção norte (em um período de 80 segundos).
Com base nas equações dos controladores obtidas na seção 4.4.5 observa-se que os con-troladores BS_MP e BSMC_MP, compartilham as variáveis de ganhos Λ1, Λ2 e K1. Os contro-ladores BSMC_MP e SMC compartilham as variáveis de ganhos Λ2, K1 e Λ𝑠, sendo que Λ2 eK1 estão presentes em todos os 3 controladores. Os valores dessas variáveis serão selecionadosa seguir, a partir de simulações que resultem nos melhores resultados para os testes aplicados.
Os resultados da realização desses testes determinam a obtenção de uma plataforma decomparação entre os controladores, de modo que os valores de seus ganhos sejam compartilha-dos entre si e seus desempenhos verificados numa mesma condição de operação.
5.3.1 Controlador Backstepping (BS_MP) submetido à vento com direção deincidência oscilante
Foram analisados os resultados obtidos por vários ganhos diferentes para o controladorBackstepping. O valor da variável Λ1 utilizada foi o mesmo do estudo dos ganhos no caso dovento constante (Λ1 = diag([0.05 0.01 0.01 0.2 0.2 0.2 0.2])). A tabela 5.6 mostra os erros MSEdos testes cujos valores foram os mais expressivos, obtidos com a variação dos valores do ganhoΛ2. Dentre esses valores temos o teste BS_MP_8 que apresenta o menor erro MSE, porém avariação de altitude (h) para esse teste tem um valor muito grande de 12m que varia em 18s.Este fato chama a atenção para o teste BS_MP_7 que tem um erro MSE de 2796m, valor nãomuito distante do teste anterior e que apresenta uma variação de altitude menor, com valor de5m para ocorrer nos primeiros 17s do teste.
Teste Λ2 K1 MSE Variação Variação de(m) de h(m) tempo(s)
BS_MP_6 diag([0.3...0.3]) diag([0.2...0.2]) 3453 5 16BS_MP_7 diag([0.1...0.1]) diag([0.2...0.2]) 2796 8 17BS_MP_8 diag([0.05...0.05]) diag([0.2...0.2]) 2410 12 18
Tabela 5.6: Erro MSE (m) obtido com a simulação utilizando o controlador BS_MP submetidoà vento com direção de incidência oscilatória variando-se Λ2.
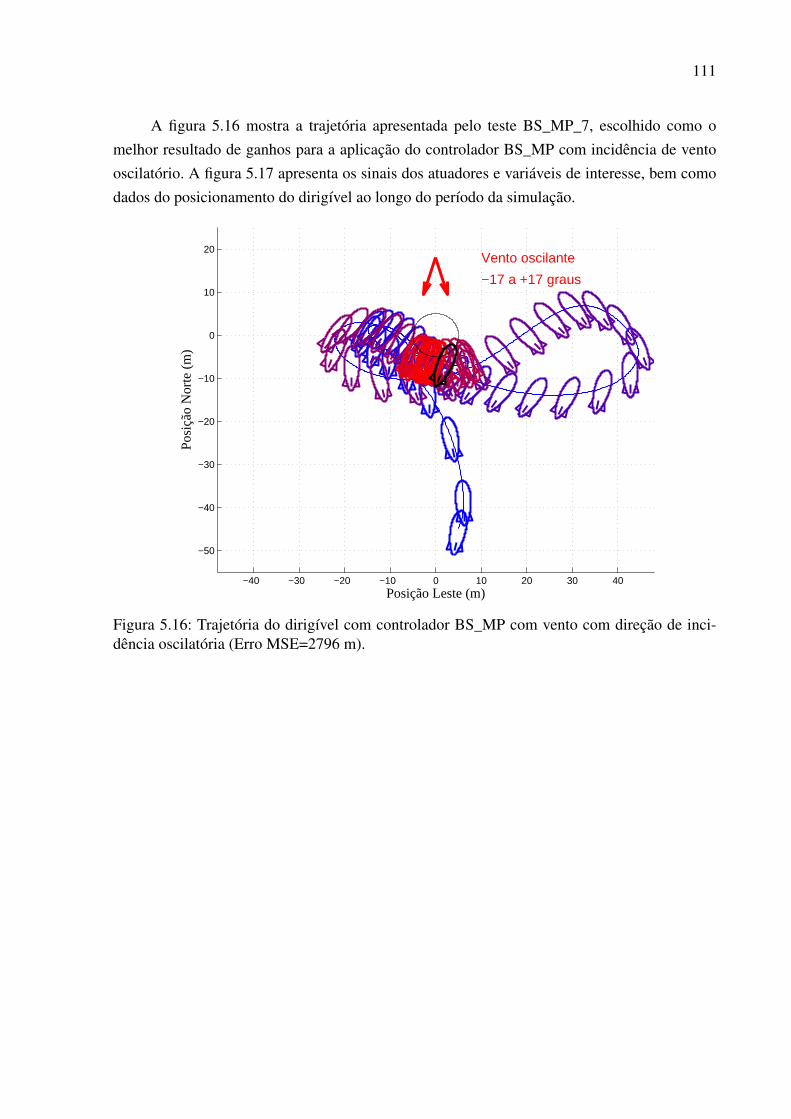
111
A figura 5.16 mostra a trajetória apresentada pelo teste BS_MP_7, escolhido como omelhor resultado de ganhos para a aplicação do controlador BS_MP com incidência de ventooscilatório. A figura 5.17 apresenta os sinais dos atuadores e variáveis de interesse, bem comodados do posicionamento do dirigível ao longo do período da simulação.
−40 −30 −20 −10 0 10 20 30 40
−50
−40
−30
−20
−10
0
10
20Vento oscilante
−17 a +17 graus
Posição Leste (m)
Pos
ição
Nor
te (
m)
Figura 5.16: Trajetória do dirigível com controlador BS_MP com vento com direção de inci-dência oscilatória (Erro MSE=2796 m).
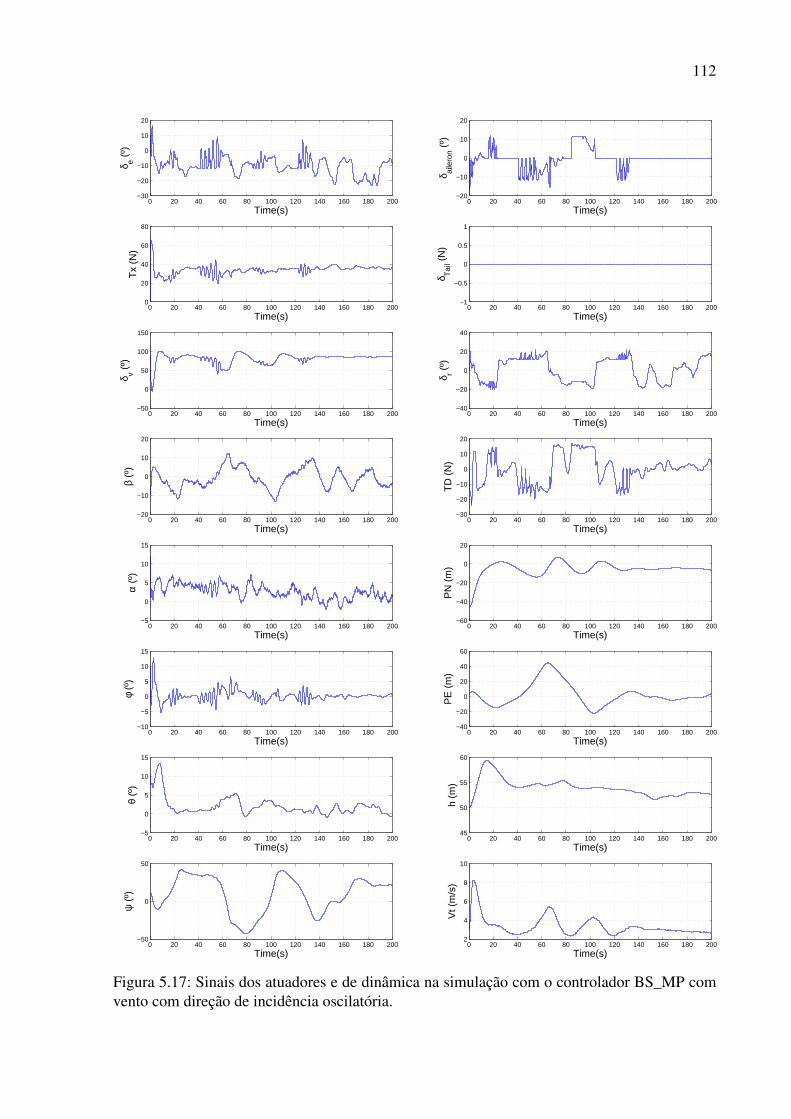
112
0 20 40 60 80 100 120 140 160 180 200−30
−20
−10
0
10
20
Time(s)
δ e (º)
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
Time(s)
Tx
(N)
0 20 40 60 80 100 120 140 160 180 200−50
0
50
100
150
Time(s)
δ v (º)
0 20 40 60 80 100 120 140 160 180 200−20
−10
0
10
20
Time(s)
δ aile
ron (
º)
0 20 40 60 80 100 120 140 160 180 200−1
−0.5
0
0.5
1
Time(s)
δ Tai
l (N
)
0 20 40 60 80 100 120 140 160 180 200−40
−20
0
20
40
Time(s)
δ r (º)
0 20 40 60 80 100 120 140 160 180 200−20
−10
0
10
20
Time(s)
β (º
)
0 20 40 60 80 100 120 140 160 180 200−5
0
5
10
15
Time(s)
α (º
)
0 20 40 60 80 100 120 140 160 180 200−30
−20
−10
0
10
20
Time(s)
TD
(N
)
0 20 40 60 80 100 120 140 160 180 200−10
−5
0
5
10
15
Time(s)
φ (º
)
0 20 40 60 80 100 120 140 160 180 200−5
0
5
10
15
Time(s)
θ (º
)
0 20 40 60 80 100 120 140 160 180 200−50
0
50
Time(s)
ψ (
º)
0 20 40 60 80 100 120 140 160 180 20045
50
55
60
Time(s)
h (m
)
0 20 40 60 80 100 120 140 160 180 200−40
−20
0
20
40
60
Time(s)
PE
(m
)
0 20 40 60 80 100 120 140 160 180 200−60
−40
−20
0
20
Time(s)
PN
(m
)
0 20 40 60 80 100 120 140 160 180 2002
4
6
8
10
Time(s)
Vt (
m/s
)
Figura 5.17: Sinais dos atuadores e de dinâmica na simulação com o controlador BS_MP comvento com direção de incidência oscilatória.
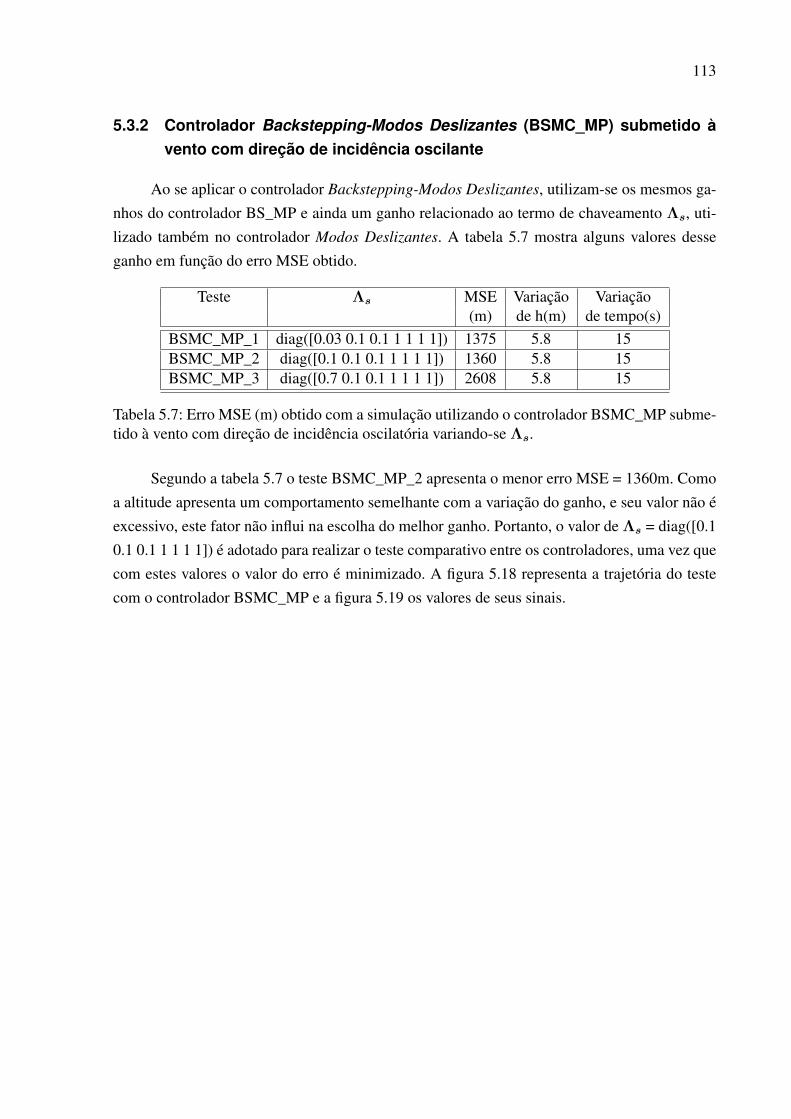
113
5.3.2 Controlador Backstepping-Modos Deslizantes (BSMC_MP) submetido àvento com direção de incidência oscilante
Ao se aplicar o controlador Backstepping-Modos Deslizantes, utilizam-se os mesmos ga-nhos do controlador BS_MP e ainda um ganho relacionado ao termo de chaveamento Λ𝑠, uti-lizado também no controlador Modos Deslizantes. A tabela 5.7 mostra alguns valores desseganho em função do erro MSE obtido.
Teste Λ𝑠 MSE Variação Variação(m) de h(m) de tempo(s)
BSMC_MP_1 diag([0.03 0.1 0.1 1 1 1 1]) 1375 5.8 15BSMC_MP_2 diag([0.1 0.1 0.1 1 1 1 1]) 1360 5.8 15BSMC_MP_3 diag([0.7 0.1 0.1 1 1 1 1]) 2608 5.8 15
Tabela 5.7: Erro MSE (m) obtido com a simulação utilizando o controlador BSMC_MP subme-tido à vento com direção de incidência oscilatória variando-se Λ𝑠.
Segundo a tabela 5.7 o teste BSMC_MP_2 apresenta o menor erro MSE = 1360m. Comoa altitude apresenta um comportamento semelhante com a variação do ganho, e seu valor não éexcessivo, este fator não influi na escolha do melhor ganho. Portanto, o valor de Λ𝑠 = diag([0.10.1 0.1 1 1 1 1]) é adotado para realizar o teste comparativo entre os controladores, uma vez quecom estes valores o valor do erro é minimizado. A figura 5.18 representa a trajetória do testecom o controlador BSMC_MP e a figura 5.19 os valores de seus sinais.
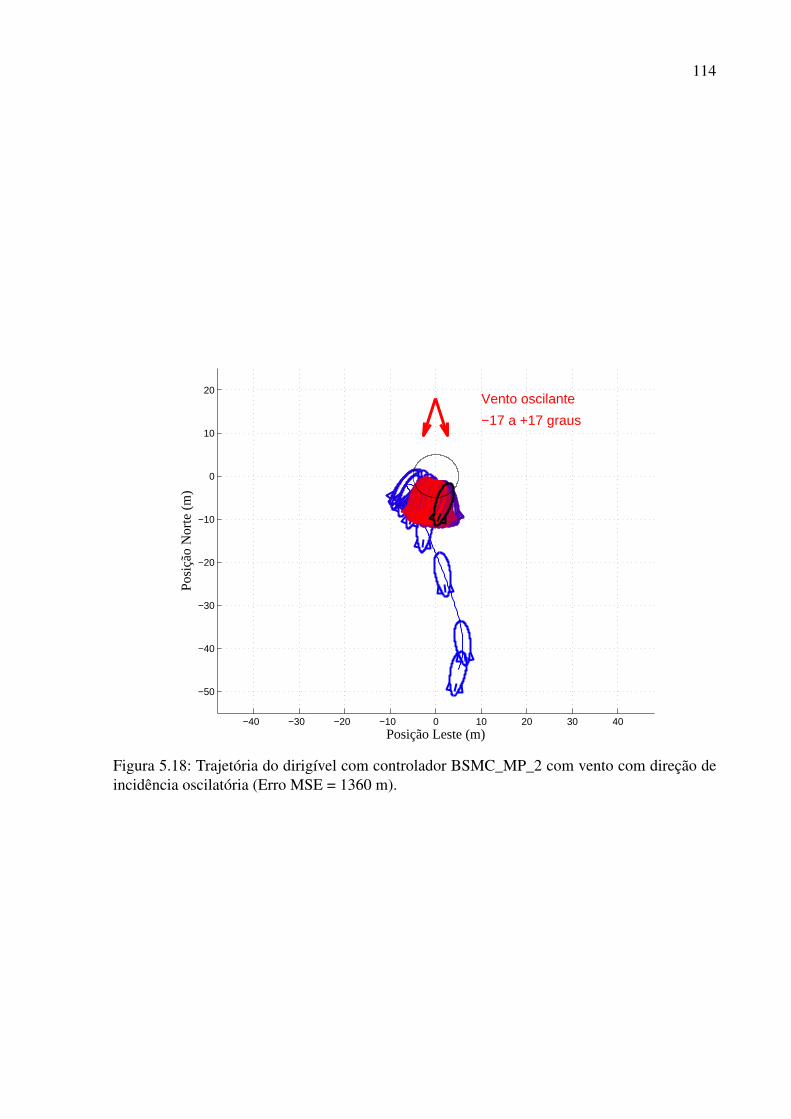
114
−40 −30 −20 −10 0 10 20 30 40
−50
−40
−30
−20
−10
0
10
20Vento oscilante
−17 a +17 graus
Posição Leste (m)
Pos
ição
Nor
te (
m)
Figura 5.18: Trajetória do dirigível com controlador BSMC_MP_2 com vento com direção deincidência oscilatória (Erro MSE = 1360 m).
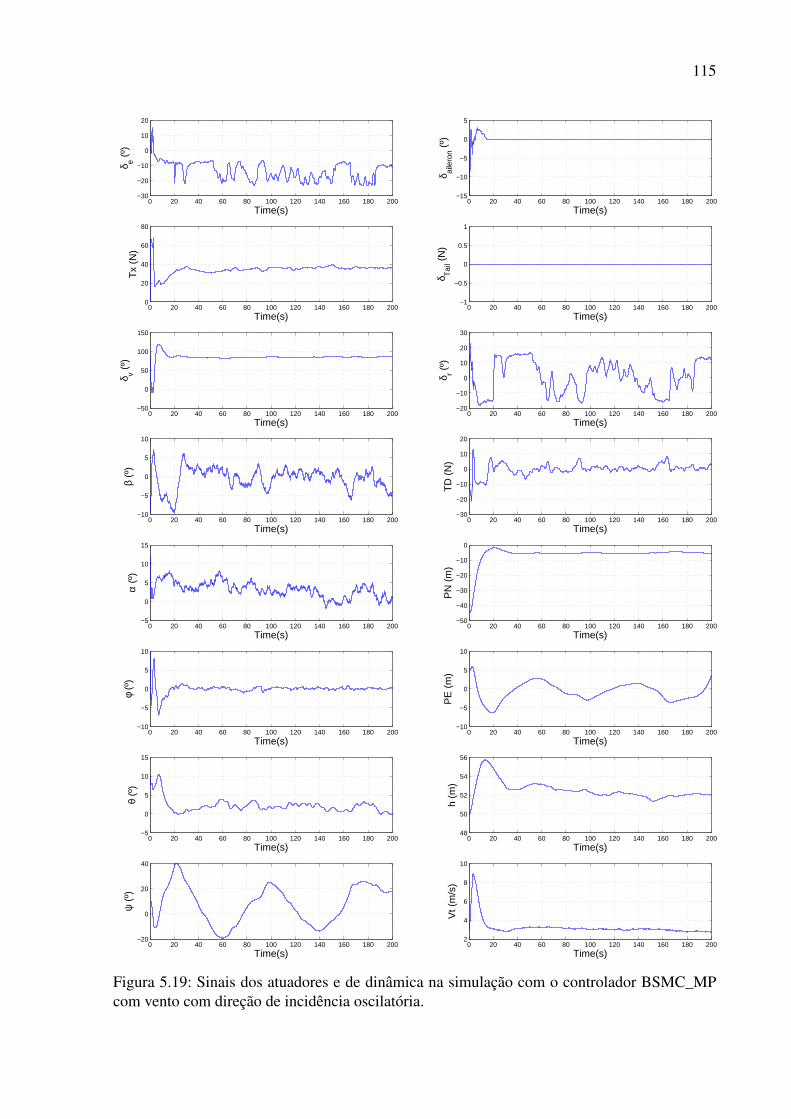
115
0 20 40 60 80 100 120 140 160 180 200−30
−20
−10
0
10
20
Time(s)
δ e (º)
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
Time(s)
Tx
(N)
0 20 40 60 80 100 120 140 160 180 200−50
0
50
100
150
Time(s)
δ v (º)
0 20 40 60 80 100 120 140 160 180 200−15
−10
−5
0
5
Time(s)
δ aile
ron (
º)
0 20 40 60 80 100 120 140 160 180 200−1
−0.5
0
0.5
1
Time(s)
δ Tai
l (N
)
0 20 40 60 80 100 120 140 160 180 200−20
−10
0
10
20
30
Time(s)
δ r (º)
0 20 40 60 80 100 120 140 160 180 200−10
−5
0
5
10
Time(s)
β (º
)
0 20 40 60 80 100 120 140 160 180 200−5
0
5
10
15
Time(s)
α (º
)
0 20 40 60 80 100 120 140 160 180 200−30
−20
−10
0
10
20
Time(s)
TD
(N
)
0 20 40 60 80 100 120 140 160 180 200−10
−5
0
5
10
Time(s)
φ (º
)
0 20 40 60 80 100 120 140 160 180 200−5
0
5
10
15
Time(s)
θ (º
)
0 20 40 60 80 100 120 140 160 180 200−20
0
20
40
Time(s)
ψ (
º)
0 20 40 60 80 100 120 140 160 180 20048
50
52
54
56
Time(s)
h (m
)
0 20 40 60 80 100 120 140 160 180 200−10
−5
0
5
10
Time(s)
PE
(m
)
0 20 40 60 80 100 120 140 160 180 200−50
−40
−30
−20
−10
0
Time(s)
PN
(m
)
0 20 40 60 80 100 120 140 160 180 2002
4
6
8
10
Time(s)
Vt (
m/s
)
Figura 5.19: Sinais dos atuadores e de dinâmica na simulação com o controlador BSMC_MPcom vento com direção de incidência oscilatória.
116
5.3.3 Controlador Modos Deslizantes (SMC) submetido à vento com direção deincidência oscilante.
Da mesma maneira que para os controladores BS_MP e BSMC_MP foram realizadasvárias simulações e dentre as que apresentaram os melhores valores para o ganho Λ𝑠 do con-trolador SMC estão as que são mostradas na tabela 5.8
Teste Λ𝑠 MSE Variação de h(m) Variação de tempo(s)SMC_1 diag([0.03 0.1 0.1 1 1 1 1]) 2028 2.2 15SMC_2 diag([0.1 0.1 0.1 1 1 1 1]) 1791 3 17SMC_3 diag([0.7 0.1 0.1 1 1 1 1]) 1392 8 15
Tabela 5.8: Erro MSE (m) obtido com a simulação utilizando o controlador SMC submetido àvento com direção de incidência oscilatória variando-se Λ𝑠.
Na tabela 5.8, verifica-se que com o aumento do valor do primeiro elemento do ganhoΛ𝑠, há a diminuição do erro MSE, porém ocorre o aumento indesejado da variação da altitude.Deste modo, adota-se o valor do teste SMC_2, que é o mesmo escolhido para o controladorBSMC_MP.
A figura 5.20 representa a trajetória do teste com o controlador SMC e a figura 5.21 osvalores de seus sinais.
−40 −30 −20 −10 0 10 20 30 40
−50
−40
−30
−20
−10
0
10
20Vento oscilante
−17 a +17 graus
Posição Leste (m)
Pos
ição
Nor
te (
m)
Figura 5.20: Trajetória do dirigível com controlador SMC com vento com direção de incidênciaoscilatória (Erro MSE = 1791 m).
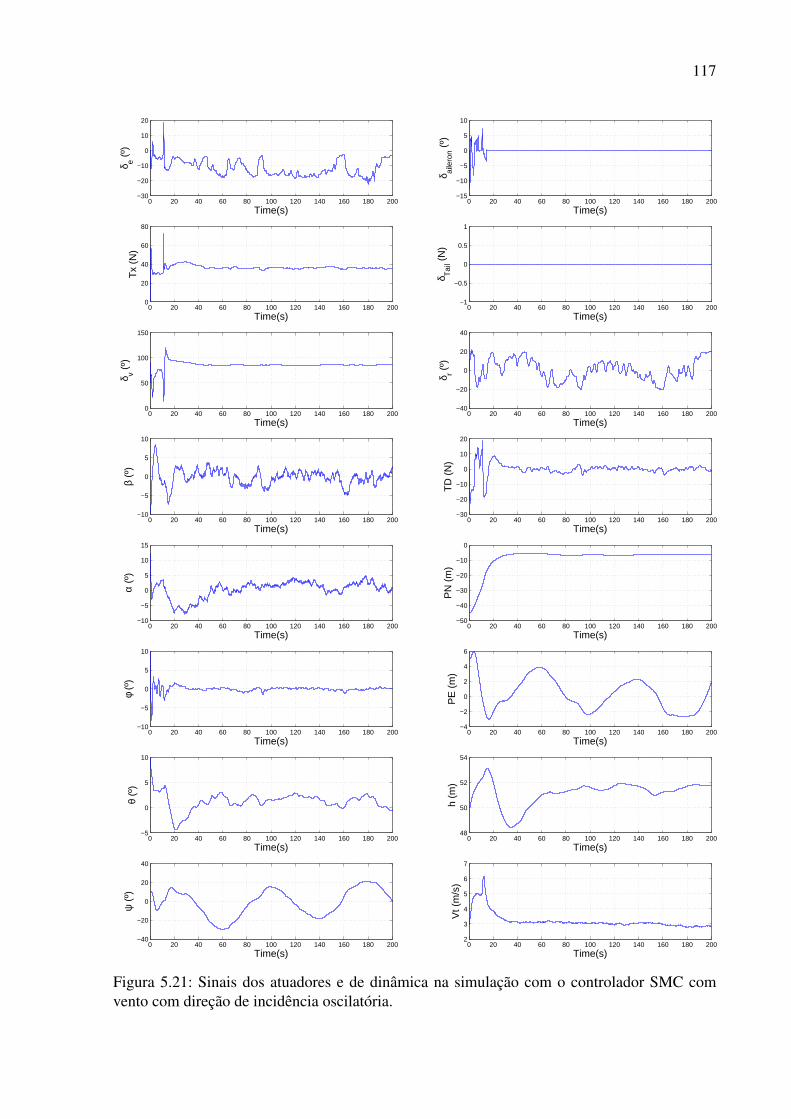
117
0 20 40 60 80 100 120 140 160 180 200−30
−20
−10
0
10
20
Time(s)
δ e (º)
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
Time(s)
Tx
(N)
0 20 40 60 80 100 120 140 160 180 2000
50
100
150
Time(s)
δ v (º)
0 20 40 60 80 100 120 140 160 180 200−15
−10
−5
0
5
10
Time(s)
δ aile
ron (
º)
0 20 40 60 80 100 120 140 160 180 200−1
−0.5
0
0.5
1
Time(s)
δ Tai
l (N
)
0 20 40 60 80 100 120 140 160 180 200−40
−20
0
20
40
Time(s)
δ r (º)
0 20 40 60 80 100 120 140 160 180 200−10
−5
0
5
10
Time(s)
β (º
)
0 20 40 60 80 100 120 140 160 180 200−10
−5
0
5
10
15
Time(s)
α (º
)
0 20 40 60 80 100 120 140 160 180 200−30
−20
−10
0
10
20
Time(s)
TD
(N
)
0 20 40 60 80 100 120 140 160 180 200−10
−5
0
5
10
Time(s)
φ (º
)
0 20 40 60 80 100 120 140 160 180 200−5
0
5
10
Time(s)
θ (º
)
0 20 40 60 80 100 120 140 160 180 200−40
−20
0
20
40
Time(s)
ψ (
º)
0 20 40 60 80 100 120 140 160 180 20048
50
52
54
Time(s)
h (m
)
0 20 40 60 80 100 120 140 160 180 200−4
−2
0
2
4
6
Time(s)
PE
(m
)
0 20 40 60 80 100 120 140 160 180 200−50
−40
−30
−20
−10
0
Time(s)
PN
(m
)
0 20 40 60 80 100 120 140 160 180 2002
3
4
5
6
7
Time(s)
Vt (
m/s
)
Figura 5.21: Sinais dos atuadores e de dinâmica na simulação com o controlador SMC comvento com direção de incidência oscilatória.
118
5.3.4 Resultados obtidos COM a inclusão do modelo aerodinâmico nas simula-ções com os controladores BS_MP, BSMC_MP e SMC com vento de dire-ção de incidência oscilante.
Os controladores foram testados COM a inclusão do modelo aerodinâmico no controlador.As forças envolvendo o perfil do envelope do dirigível auxiliam as manobras diminuindo o erroMSE. A tabela 5.9 mostra a diminuição dos erros com a aplicação do modelo aerodinâmico aoscontroladores.
Controlador MSE com modelo aerodinâmico MSE sem modelo aerodinâmicoBS_MP 2117 2796
BSMC_MP 1297 1360SMC 1486 1791
Tabela 5.9: Valores dos erros MSE dos controladores BS_MP, BSMC_MP e SMC com modeloaerodinâmico.
A inclusão das forças aerodinâmicas na lei de controle permite reduzir, como esperado,o erro de trajetória MSE em todos os controladores utilizados, além de reduzir também outroserros de rastreamento importantes como PN, PE e h, bem como melhorar o desempenho navelocidade real do ar Vt. É importante notar também que embora os desempenhos no rastrea-mento tenham melhorado, o comportamento dos controladores BSMC_MP e SMC exibiram asua atividade nos sinais de controle (atuadores) um pouco mais oscilatória em alguns trechos,ou seja, com a presença de mais “chattering”.
No caso do controlador BS_MP, alguns sinais como ângulo de guinada 𝜓, posição norte(PN) e Vt, indicam uma melhoria considerável quando se incorpora o modelo aerodinâmico nocontrole, como mostra a figura 5.22, que sobrepõe os resultados obtidos num teste compara-tivo entre o uso do controlador COM e SEM o modelo aerodinâmico. Aliás, de todos os trêscasos (figuras 5.22, 5.23 e 5.24), o controlador BS_MP apresenta-se como o mais sensível aoconhecimento prévio do modelo, o que significa uma menor robustez a variações paramétri-cas. Já o controlador SMC (figura 5.24) apresenta-se como o menos sensível (mais robusto).Pode-se perceber nessa figura que os sinais COM e SEM modelo aerodinâmico no controle nãoapresentam grandes variações.
Essa observação sobre a grande robustez do controlador SMC poderia levar, em uma pri-meira análise, à conclusão de que este seria o melhor controlador para executar esse tipo detarefa de voo. Entretanto, além de ser também robusto, e de possuir um erro quadrático médiomenor (MSE), conforme mostra a Tabela 5.9, o controlador BSMC_MP apresenta também tem-pos de resposta menores do que os outros dois controladores, vide por exemplo, os sinais PN,PE, h e Vt, sendo que em alguns casos o tempo de resposta do BSMC_MP chega a ser quase ametade daqueles obtidos com o controlador SMC.
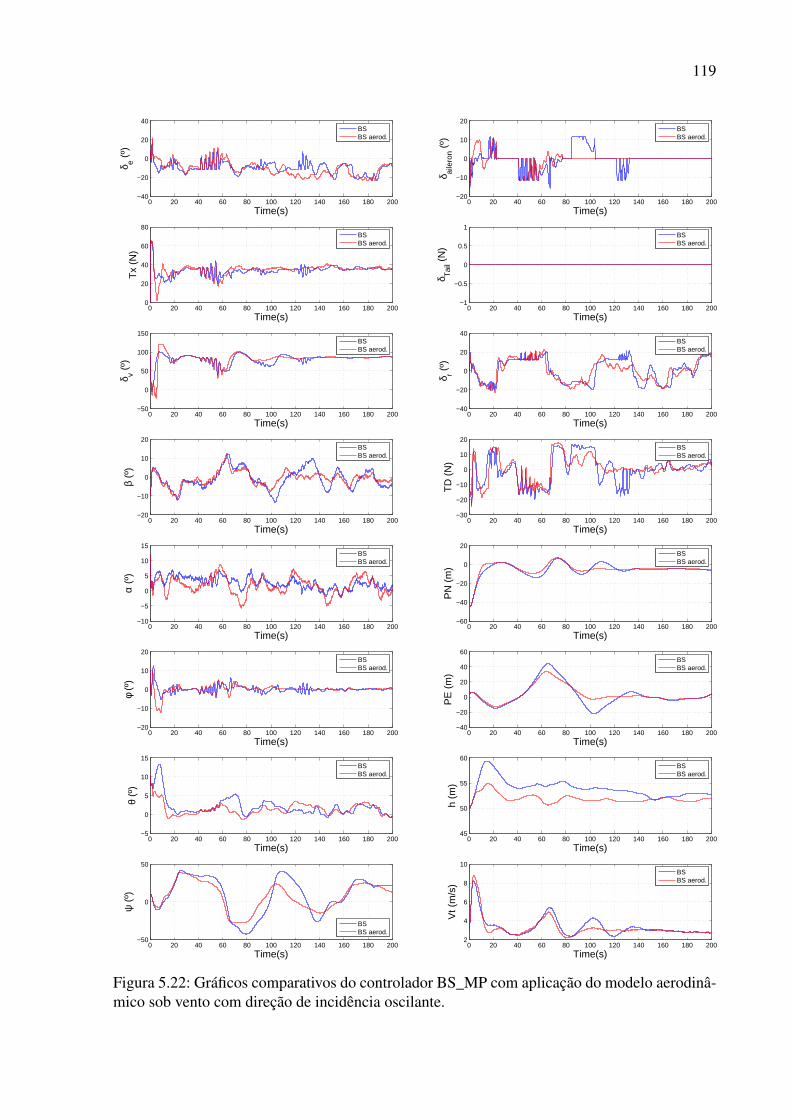
119
0 20 40 60 80 100 120 140 160 180 200−40
−20
0
20
40
Time(s)
δ e (º)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
Time(s)
Tx
(N)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 200−50
0
50
100
150
Time(s)
δ v (º)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 200−20
−10
0
10
20
Time(s)
δ aile
ron (
º)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 200−1
−0.5
0
0.5
1
Time(s)
δ Tai
l (N
)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 200−40
−20
0
20
40
Time(s)
δ r (º)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 200−20
−10
0
10
20
Time(s)
β (º
)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 200−10
−5
0
5
10
15
Time(s)
α (º
)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 200−30
−20
−10
0
10
20
Time(s)
TD
(N
)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 200−20
−10
0
10
20
Time(s)
φ (º
)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 200−5
0
5
10
15
Time(s)
θ (º
)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 200−50
0
50
Time(s)
ψ (
º)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 20045
50
55
60
Time(s)
h (m
)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 200−40
−20
0
20
40
60
Time(s)
PE
(m
)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 200−60
−40
−20
0
20
Time(s)
PN
(m
)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 2002
4
6
8
10
Time(s)
Vt (
m/s
)
BSBS aerod.
Figura 5.22: Gráficos comparativos do controlador BS_MP com aplicação do modelo aerodinâ-mico sob vento com direção de incidência oscilante.
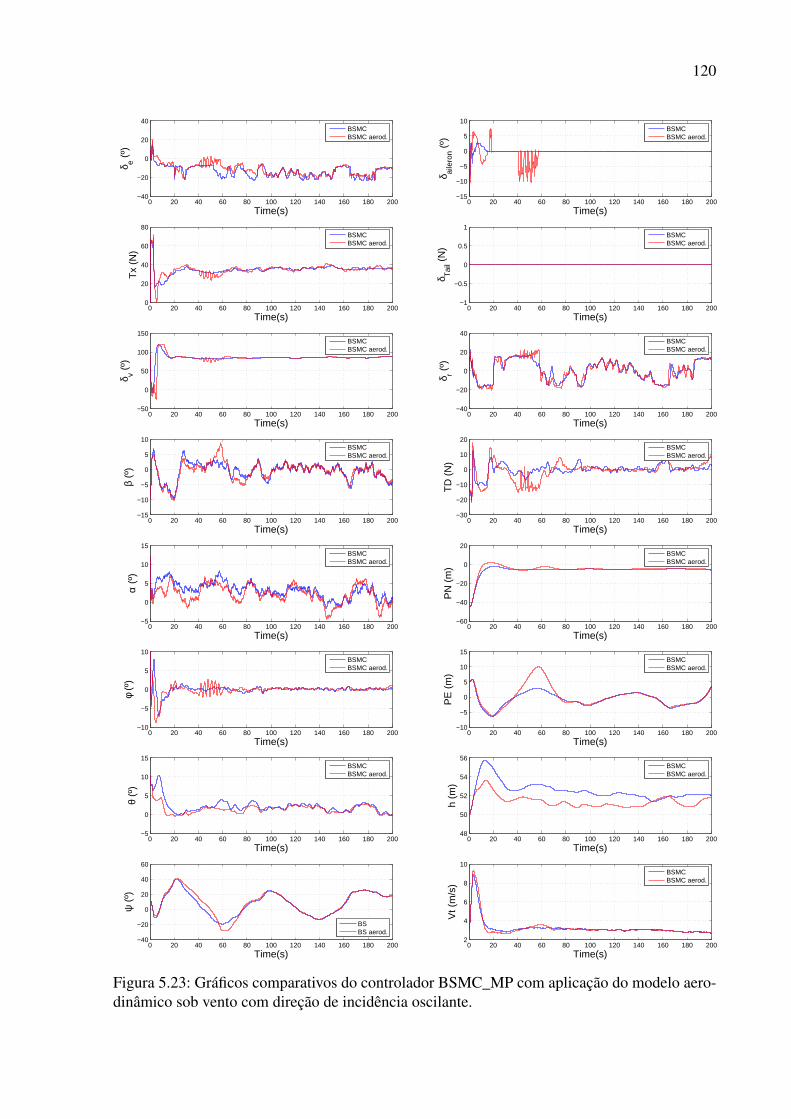
120
0 20 40 60 80 100 120 140 160 180 200−40
−20
0
20
40
Time(s)
δ e (º)
BSMCBSMC aerod.
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
Time(s)
Tx
(N)
BSMCBSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−50
0
50
100
150
Time(s)
δ v (º)
BSMCBSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−15
−10
−5
0
5
10
Time(s)
δ aile
ron (
º)
BSMCBSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−1
−0.5
0
0.5
1
Time(s)
δ Tai
l (N
)
BSMCBSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−40
−20
0
20
40
Time(s)
δ r (º)
BSMCBSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−15
−10
−5
0
5
10
Time(s)
β (º
)
BSMCBSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−5
0
5
10
15
Time(s)
α (º
)
BSMCBSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−30
−20
−10
0
10
20
Time(s)
TD
(N
)
BSMCBSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−10
−5
0
5
10
Time(s)
φ (º
)
BSMCBSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−5
0
5
10
15
Time(s)
θ (º
)
BSMCBSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−40
−20
0
20
40
60
Time(s)
ψ (
º)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 20048
50
52
54
56
Time(s)
h (m
)
BSMCBSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−10
−5
0
5
10
15
Time(s)
PE
(m
)
BSMCBSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−60
−40
−20
0
20
Time(s)
PN
(m
)
BSMCBSMC aerod.
0 20 40 60 80 100 120 140 160 180 2002
4
6
8
10
Time(s)
Vt (
m/s
)
BSMCBSMC aerod.
Figura 5.23: Gráficos comparativos do controlador BSMC_MP com aplicação do modelo aero-dinâmico sob vento com direção de incidência oscilante.
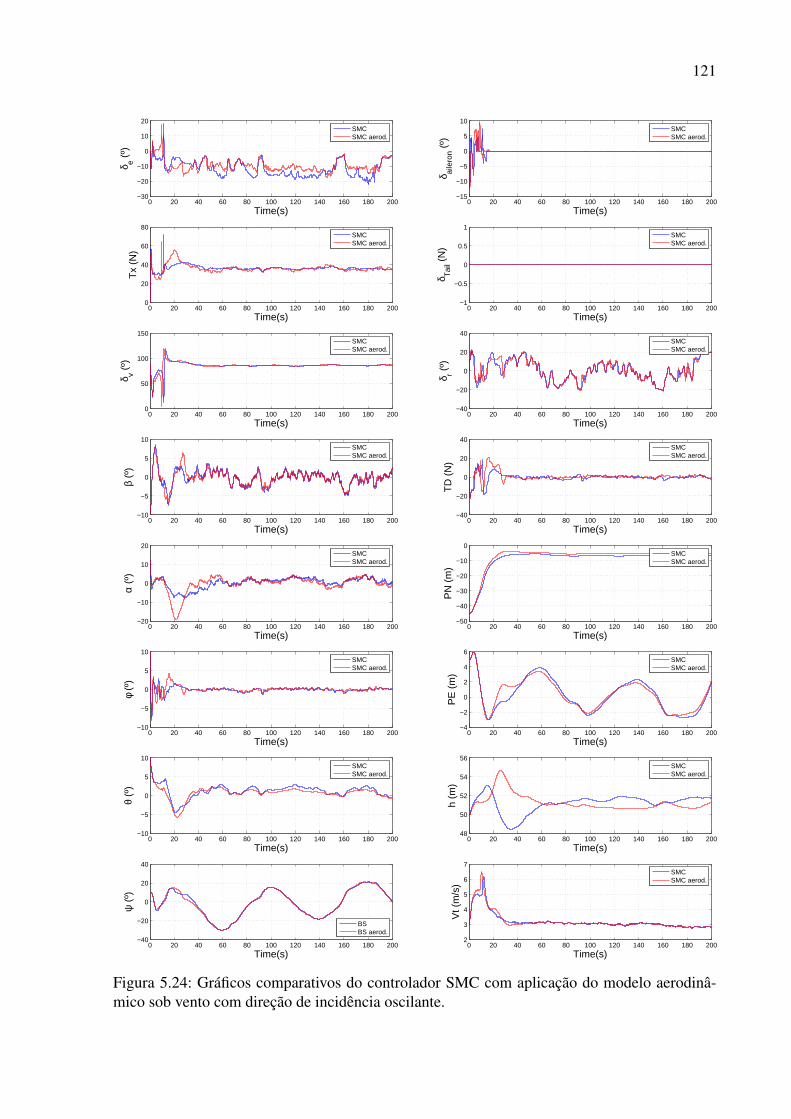
121
0 20 40 60 80 100 120 140 160 180 200−30
−20
−10
0
10
20
Time(s)
δ e (º)
SMCSMC aerod.
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
Time(s)
Tx
(N)
SMCSMC aerod.
0 20 40 60 80 100 120 140 160 180 2000
50
100
150
Time(s)
δ v (º)
SMCSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−15
−10
−5
0
5
10
Time(s)
δ aile
ron (
º)
SMCSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−1
−0.5
0
0.5
1
Time(s)
δ Tai
l (N
)
SMCSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−40
−20
0
20
40
Time(s)
δ r (º)
SMCSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−10
−5
0
5
10
Time(s)
β (º
)
SMCSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−20
−10
0
10
20
Time(s)
α (º
)
SMCSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−40
−20
0
20
40
Time(s)
TD
(N
)
SMCSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−10
−5
0
5
10
Time(s)
φ (º
)
SMCSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−10
−5
0
5
10
Time(s)
θ (º
)
SMCSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−40
−20
0
20
40
Time(s)
ψ (
º)
BSBS aerod.
0 20 40 60 80 100 120 140 160 180 20048
50
52
54
56
Time(s)
h (m
)
SMCSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−4
−2
0
2
4
6
Time(s)
PE
(m
)
SMCSMC aerod.
0 20 40 60 80 100 120 140 160 180 200−50
−40
−30
−20
−10
0
Time(s)
PN
(m
)
SMCSMC aerod.
0 20 40 60 80 100 120 140 160 180 2002
3
4
5
6
7
Time(s)
Vt (
m/s
)
SMCSMC aerod.
Figura 5.24: Gráficos comparativos do controlador SMC com aplicação do modelo aerodinâ-mico sob vento com direção de incidência oscilante.
122
5.4 Conclusões do Capítulo 5
5.4.1 Comparação de resultados do Backstepping_MP e o controlador de Azi-nheira (Azinheira et al., 2008)
O controlador Backstepping_MP (BS_MP_6) leva vantagem sobre o controlador de Azi-nheira (Azinheira et al., 2008) (BS_AZ2) em relação ao rastreamento de posição, apresentandouma trajetória mais direta e também no tempo de resposta. Os resultados mais expressivos dacomparação entre os controladores BS_MP_6 e BS_AZ2 podem ser vistos na figura 5.25.
O tempo para atingir o alvo para o teste BS_AZ2 é de aproximadamente 50s, como mostrao gráfico da posição norte (PN), enquanto o controlador BS_MP_6 leva apenas 12s. O valor dodesvio lateral (PE) também foi menor para o controlador BS_MP_6 com valor de aproximada-mente 3m à Oeste contra 6m do controlador BS_AZ2. Não foi possível encontrar um conjuntode ganhos que diminuissem esses valores de erro de posicionamento para o controlador Backs-
tepping de Azinheira (Azinheira et al., 2008).O desvio na altitude foi menor no controlador Backstepping de Azinheira do que no con-
trolador Backstepping_MP, como pode ser visto no gráfico da altitude h(m) em função dotempo. Este fato pode ser explicado pela velocidade Vt(m/s) em relação ao referencial iner-cial que é bem maior no controlador BS_MP_6 do que no BS_AZ2. Tal velocidade dificulta arealização da manobra de “apontar para o vento”, uma vez que sua atitude inicial é de 10 grausaplicada em cada um dos eixos de referência do dirigível. Com o ângulo inicial de arfagemde 10 graus, o dirigível está inicialmente apontado para cima, o que o faz subir nos primeirosinstantes da simulação.
Outros valores de ganhos permitiam uma velocidade Vt(m/s) maior, mas o controladornão conseguia “frear” o dirigível no alvo, “passando” pela posição desejada e tornando suatrajetória imprecisa.
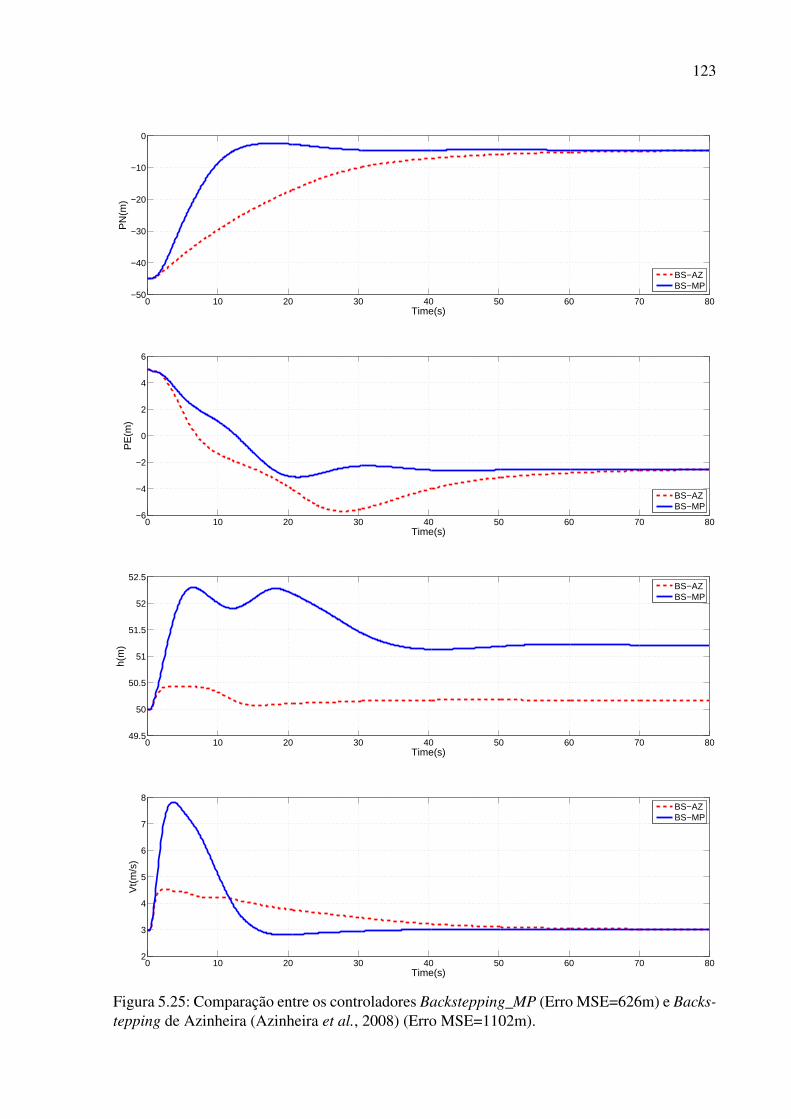
123
0 10 20 30 40 50 60 70 80−50
−40
−30
−20
−10
0
Time(s)
PN
(m)
BS−AZBS−MP
0 10 20 30 40 50 60 70 80−6
−4
−2
0
2
4
6
Time(s)
PE
(m)
BS−AZBS−MP
0 10 20 30 40 50 60 70 8049.5
50
50.5
51
51.5
52
52.5
Time(s)
h(m
)
BS−AZBS−MP
0 10 20 30 40 50 60 70 802
3
4
5
6
7
8
Time(s)
Vt(
m/s
)
BS−AZBS−MP
Figura 5.25: Comparação entre os controladores Backstepping_MP (Erro MSE=626m) e Backs-tepping de Azinheira (Azinheira et al., 2008) (Erro MSE=1102m).
124
5.4.2 Comparação de resultados com os controles BS_MP, BSMC_MP e SMCcom incidência de vento oscilatória
Verifica-se ao analisar as figuras 5.16, 5.18 e 5.20, que representam as trajetórias dos tes-tes, que o controlador BS_MP fornece uma resposta pobre de rastreamento, ao contrário doscontroladores BSMC_MP e SMC. Nota-se também que embora o controlador BSMC_MP (fi-guras 5.18 e 5.19) tenha fornecido o menor erro médio quadrático global (MSE), o controladorSMC (figuras 5.20 e 5.21) resulta em um comportamento mais estável, com a variação de gui-nada mais suave na aproximação do alvo.
O teste do controlador BS_MP apresenta um desvio no posicionamento após alguns ins-tantes depois de atingir o alvo. Este fato mostra a falta de robustez deste controlador. O termochaveado, presente nos controladores BSMC_MP e SMC, permite um comportamento estávelsuperando a presença de incertezas impostas pelo vento de direção de incidência oscilante. Po-rém, os sinais de controle tiveram o “chattering” similar entre BSMC_MP e SMC, ocasionadopelo mesmo termo chaveado.
Como nas figuras das trajetórias os desenhos do dirigível são apresentados em intervalosde 3 segundos, a distância entre as figuras determina a variação da aceleração do dirigível.Seu valor é sensivelmente maior no início da trajetória obtida com os controladores BS_MPe BSMC_MP, comparando ao SMC. Isto permite atingir a região próxima ao alvo em menostempo, o que pode conferir ao controlador BSMC_MP o título de melhor alternativa para esteteste.
A figura 5.26 mostra os gráficos comparativos entre os três controladores onde podemser visualizados os seus valores de velocidade em relação ao sistema inercial (Vt), o ângulo deguinada (𝜓) e as posições norte (PN) e leste (PE). O tempo de resposta para atingir o alvo noscontroladores BS_MP e BSMC_MP é semelhante com valor de aproximadamente 13s, com ocontrolador SMC o tempo para atingir o alvo é bem superior, por volta de 30s. Esse tempo estárelacionado às velocidades atingidas pelos controladores, mostradas na figura 5.26. Os valorespara com os controladores BS_MP e BSMC_MP são semelhantes com valor máximo aproxi-mado de 8m/s enquanto esse valor para o controlador SMC, é de 5m/s. Após entrar em regimeo valor da velocidade airspeed se estabiliza em 3m/s, valor da velocidade do vento. No casodo controlador BS, essa estabilização ocorre apenas após 150s enquanto com os controladoresBSMC_MP e SMC isto ocorre mais rapidamente, logo após 40s.
O ângulo de guinada (𝜓) varia conforme a direção do vento oscilatório nos testes realiza-dos com os três controladores, isto é, o dirigível procura sempre apontar para a direção contrao vento, mesmo durante o desvio de trajetória ocorrido com o controlador BS. Este, não conse-gue seguir a variação oscilatória do vento tão bem quanto os controladores BSMC_MP e SMC,apresentando um comportamento defasado no tempo até o instante 150s, quando atinge umcomportamento semelhante ao dos outros controladores. O que pode ser visto na figura 5.26.
As trajetórias realizadas pelos controladores também são comparadas na figura 5.26. Onde
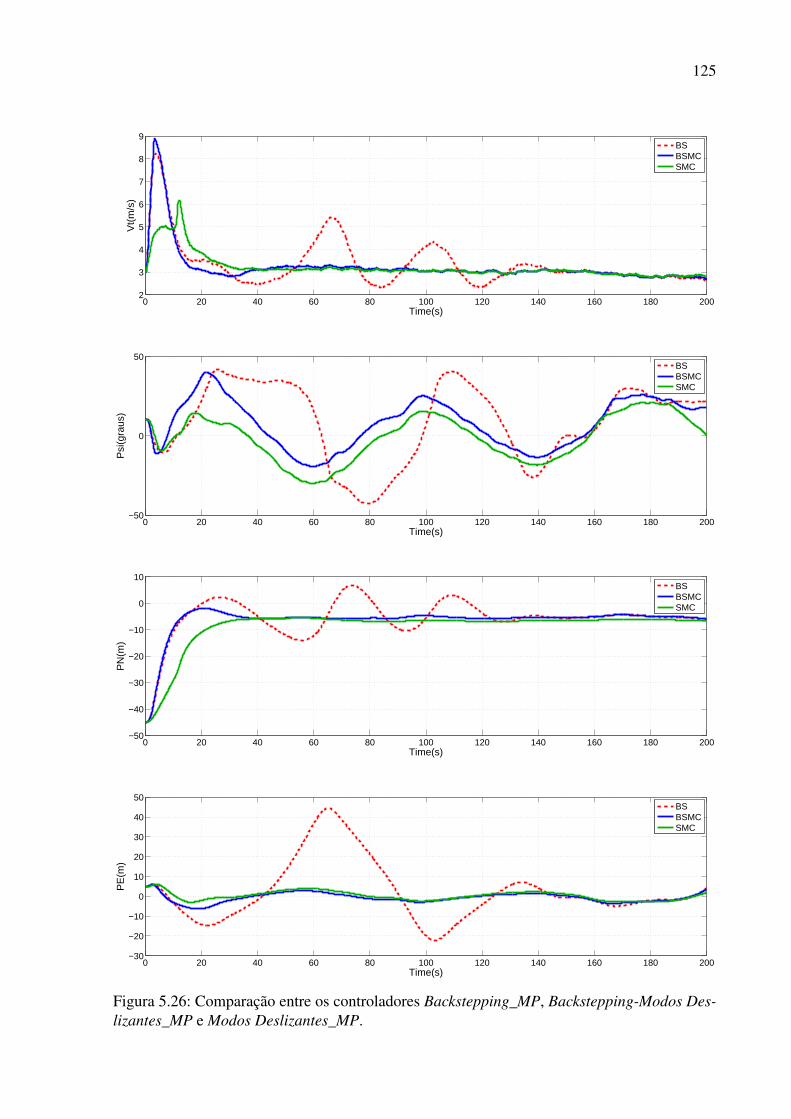
125
0 20 40 60 80 100 120 140 160 180 2002
3
4
5
6
7
8
9
Time(s)
Vt(
m/s
)
BSBSMCSMC
0 20 40 60 80 100 120 140 160 180 200−50
0
50
Time(s)
Psi
(gra
us)
BSBSMCSMC
0 20 40 60 80 100 120 140 160 180 200−50
−40
−30
−20
−10
0
10
Time(s)
PN
(m)
BSBSMCSMC
0 20 40 60 80 100 120 140 160 180 200−30
−20
−10
0
10
20
30
40
50
Time(s)
PE
(m)
BSBSMCSMC
Figura 5.26: Comparação entre os controladores Backstepping_MP, Backstepping-Modos Des-lizantes_MP e Modos Deslizantes_MP.
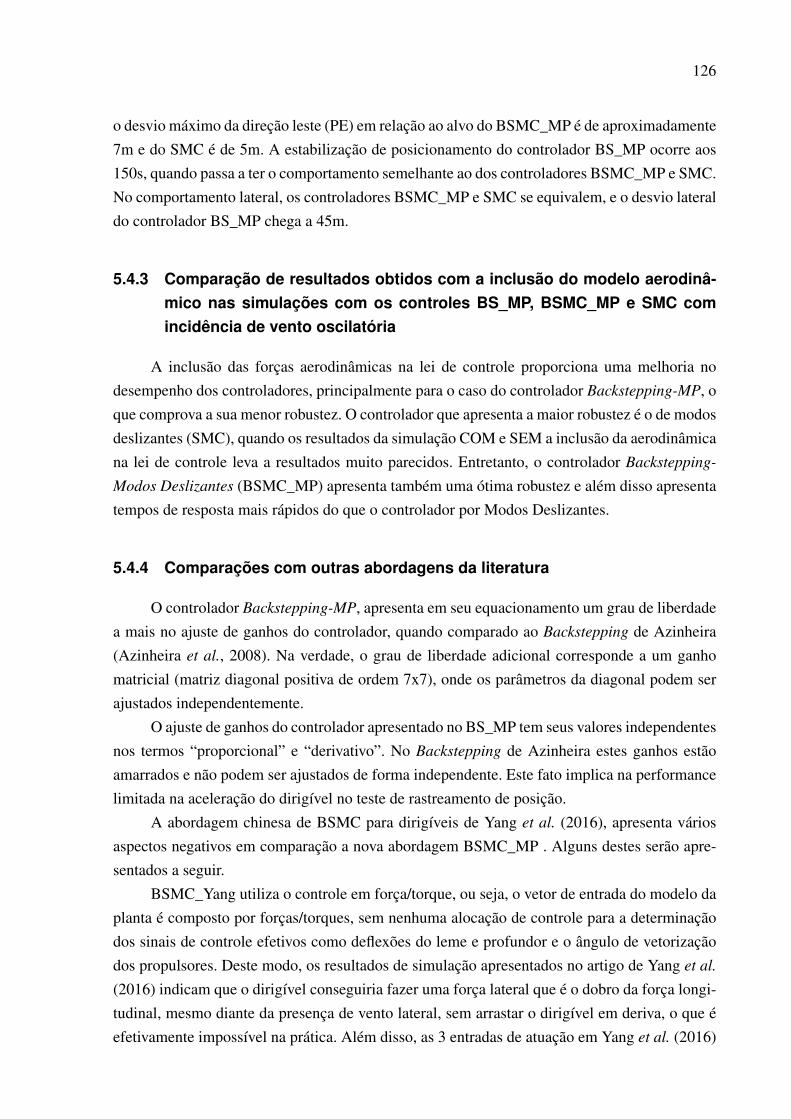
126
o desvio máximo da direção leste (PE) em relação ao alvo do BSMC_MP é de aproximadamente7m e do SMC é de 5m. A estabilização de posicionamento do controlador BS_MP ocorre aos150s, quando passa a ter o comportamento semelhante ao dos controladores BSMC_MP e SMC.No comportamento lateral, os controladores BSMC_MP e SMC se equivalem, e o desvio lateraldo controlador BS_MP chega a 45m.
5.4.3 Comparação de resultados obtidos com a inclusão do modelo aerodinâ-mico nas simulações com os controles BS_MP, BSMC_MP e SMC comincidência de vento oscilatória
A inclusão das forças aerodinâmicas na lei de controle proporciona uma melhoria nodesempenho dos controladores, principalmente para o caso do controlador Backstepping-MP, oque comprova a sua menor robustez. O controlador que apresenta a maior robustez é o de modosdeslizantes (SMC), quando os resultados da simulação COM e SEM a inclusão da aerodinâmicana lei de controle leva a resultados muito parecidos. Entretanto, o controlador Backstepping-
Modos Deslizantes (BSMC_MP) apresenta também uma ótima robustez e além disso apresentatempos de resposta mais rápidos do que o controlador por Modos Deslizantes.
5.4.4 Comparações com outras abordagens da literatura
O controlador Backstepping-MP, apresenta em seu equacionamento um grau de liberdadea mais no ajuste de ganhos do controlador, quando comparado ao Backstepping de Azinheira(Azinheira et al., 2008). Na verdade, o grau de liberdade adicional corresponde a um ganhomatricial (matriz diagonal positiva de ordem 7x7), onde os parâmetros da diagonal podem serajustados independentemente.
O ajuste de ganhos do controlador apresentado no BS_MP tem seus valores independentesnos termos “proporcional” e “derivativo”. No Backstepping de Azinheira estes ganhos estãoamarrados e não podem ser ajustados de forma independente. Este fato implica na performancelimitada na aceleração do dirigível no teste de rastreamento de posição.
A abordagem chinesa de BSMC para dirigíveis de Yang et al. (2016), apresenta váriosaspectos negativos em comparação a nova abordagem BSMC_MP . Alguns destes serão apre-sentados a seguir.
BSMC_Yang utiliza o controle em força/torque, ou seja, o vetor de entrada do modelo daplanta é composto por forças/torques, sem nenhuma alocação de controle para a determinaçãodos sinais de controle efetivos como deflexões do leme e profundor e o ângulo de vetorizaçãodos propulsores. Deste modo, os resultados de simulação apresentados no artigo de Yang et al.
(2016) indicam que o dirigível conseguiria fazer uma força lateral que é o dobro da força longi-tudinal, mesmo diante da presença de vento lateral, sem arrastar o dirigível em deriva, o que éefetivamente impossível na prática. Além disso, as 3 entradas de atuação em Yang et al. (2016)
127
duas de força e uma de momento (Fx, Fy, Mr) estão limitadas a ±200N para as forças e ±2.000N.m para o momento, que parecem valores elevados para um dirigível de 25 m de comprimento,principalmente no que tange às forças laterais.
No projeto do Backstepping apresentado, a primeira variável auxiliar z1 de Yang et al.
(2016) é o erro de posição como na metodologia de Backstepping vetorial. Entretanto, a se-gunda variável auxiliar z2 do projeto Backstepping é uma complexa combinação do erro deposição com o erro de velocidade, ao invés de uma ponderação simples entre os dois. Assim,este não pode ser considerado como um Backstepping vetorial. O desenvolvimento da funçãode Lyapunov associada também apresenta problemas de desenvolvimento, com a imposiçãode restrições necessárias sobre os ganhos de controle, o que não é necessário no controladorBackstepping_MP apresentado neste trabalho.
O dirigível de Yang et al. (2016) é suposto voar “neutro”, ou seja 𝑝𝑒𝑠𝑜 = 𝑒𝑚𝑝𝑢𝑥𝑜, o quenão acontece na prática, já que os dirigíveis voam ligeiramente pesados para facilitar o procedi-mento de descida. Esta simplificação deve-se para se trabalhar com o dirigível movimentando-seapenas no plano horizontal, ou seja, com 3 graus de liberdade (controlando a posição Norte xLeste e a orientação em um plano de altitude constante). Ao contrário, a abordagem BSMC_MPtrabalha de forma completa com os 6 graus de liberdade.
Os sinais de chattering nas forças de controle mostrados no artigo não podem ser bemvisualizados e interpretados pois são mostrados numa figura onde as escala máxima é 10 vezesmaior do que a amplitude do sinal com chattering. Além disso, os autores não apresentam osvalores utilizados dos ganhos dos controladores em nenhum dos casos (SMC ou BSMC), nemos eventuais ganhos para dessintonização ou redução do chattering.
O projeto de controle do BSMC de Yang et al. (2016) não considera um estimador dovento, que é uma importante perturbação, tanto com relação à sua intensidade como com re-lação à sua direção ou incidência. O modelo de simulação do dirigível em Yang et al. (2016)contempla a existência de vento, mas não contempla a presença de turbulência que é uma variá-vel estocástica. A inexistência de um modelo de vento também não permite gerar um “airspeed
de referência” subtraindo-se o efeito do vento, que é conhecido como “reference-shaping”, umaestratégia de guiamento que evita a saturação dos atuadores, principalmente das superfícies decauda, utilizada na abordagem de BSMC_MP . Não se menciona detalhes sobre o modelo aero-dinâmico em momento algum, sendo este uma incerteza que faz parte do sinal de controle, ouseja, do sinal de entrada que é o vetor de forças e torques “f”.
Devido à inexistência de um estimador de vento, o trabalho de Yang et al. (2016) aplica-seapenas ao problema do posicionamento (estabilização do dirigível), já que em baixas velocida-des, o modelo aerodinâmico, que depende do vento, pode ser eventualmente desprezado. Já oproblema de rastreamento de trajetória, que exige um bom conhecimento do modelo aerodinâ-mico não pode ser implementado.
Neste aspecto, este trabalho pode ser facilmente estendido para o caso do problema derastreamento de trajetória, pois utiliza-se um estimador de vento. Embora deva-se ressaltar que
128
apesar do estimador já estar implementado, a sua função de Lyapunov associada ainda nãofoi ligada à função de Lyapunov do projeto dos controladores como realizado em Azinheira(Azinheira et al., 2008)), para uma derivação de uma lei de controle que leve em conta a con-vergência do estimador.
129
6 CONCLUSÃO GERAL
O foco da pesquisa desta tese foi o projeto de três abordagens controladores não linearespara dirigíveis autônomos e não tripulados, visando a realização de uma missão completa dessetipo de aeronave "mais leve que o ar", mais especificamente voltado ao problema do controlede posicionamento e tracking do dirigível AS800 do Projeto AURORA.
Dessa forma, foram projetadas, implementadas e testadas em simulação, as abordagens decontrole multivariável de Modos Deslizantes (SMC) e de Backstepping (BS), sendo essa últimauma proposta com uma abordagem inédita que se mostrou mais robusta e eficiente do que umaalternativa semelhante desenvolvida anteriormente pelo mesmo grupo de pesquisa (Azinheira eMoutinho, 2008).
Foi também desenvolvida uma nova técnica de controle combinando as vantagens de cadauma das duas “abordagens-base”, no chamado controle por Backstepping-Modos Deslizantes
(BSMC), que agrega as características de robustez da técnica de Modos Deslizantes com acaracterística de resposta mais rápida do Backstepping.
Destaca-se que para poder realizar a comparação analítica detalhada desses três contro-ladores, foi necessário primeiramente derivar uma estrutura matemática padrão para as trêstécnicas, a fim de permitir a comparação entre os termos e ganhos dos controladores e seusefeitos.
Portanto, podemos dizer que os principais resultados alcançados nesse trabalho são:1. Desenvolvimento de uma estrutura padrão comum às 3 abordagens (BS, SMC 6e BSMC),
ou seja, leis de controle que possuem termos semelhantes e para facilitar a comparaçãode desempenho dos controladores.
2. Desenvolvimento de uma nova técnica de controle por Backstepping (BS) para o problemade controle de dirigíveis.
3. Desenvolvimento de uma nova técnica de controle por Backstepping-Modos Deslizantes
(BSMC) para o problema de controle de dirigíveis.4. Realização de uma análise comparativa de desempenho, através de resultados de simula-
ção entre as leis de controle dos 3 controladores (BS, SMC e BSMC) projetadas.A seguir destacam-se alguns detalhes relevantes das duas novas técnicas aqui desenvolvidas.
6.1 Projeto Backstepping (BS_MP)
Foi apresentado o desenvolvimento de uma nova técnica de Backstepping para controlede dirigíveis, seguindo a linha de Backstepping Vetorial de Fossen e Strand (1999).
A técnica proposta Backstepping_MP se diferencia desta última por trabalhar com ummodelo mais simplificado nas equações de Lyapunov e por incluir a estimação de perturbações.
Na metodologia proposta, são definidas de forma conveniente variáveis utilizadas na de-dução da lei de controle. A variável auxiliar z1 do projeto BS_MP é o erro de posição, enquanto
130
que a variável auxiliar z2 é uma combinação do erro de posição com o erro de velocidade, comoapresentado no capítulo 4. Ao contrário, no projeto do controlador Backstepping da abordagemde Azinheira (Azinheira et al., 2008) a variável auxiliar z1 é uma combinação do erro de posi-ção com o erro de velocidade, enquanto que a variável z2 é o erro de velocidade (ao invés deposição). Essa combinação permite a obtenção de ganhos desacoplados no controlador, desvin-culando o ajuste do termo “derivativo ” do ajuste do termo “proporcional” na lei de controle.Dessa forma, ao contrário do trabalho anterior, esses ganhos podem ser ajustados de forma in-dependente. Este fato permite ao controlador proposto um ajuste de ganhos que lhe confere umdesempenho superior no teste de rastreamento de posição.
6.2 Projeto Backstepping-Modos Deslizantes (BSMC_MP)
Foi desenvolvida uma nova abordagem de Backstepping-Modos Deslizantes (BSMC_MP)para controle de dirigíveis, combinando uma versão adaptada do Backstepping Vetorial de Fos-sen e Strand (1999) com uma lei de controle por chaveamento. O diferencial do Backstepping
Vetorial aqui utilizado, com relação à proposta inicial de Fossen, incluiu uma nova forma de seconstruir a função de Lyapunov, utilizando termos mais simples, e a inclusão de uma estimaçãoda perturbação no sistema (estimador de vento), caracterizando assim um Backstepping vetorialrobusto. Além disso, a inclusão do termo de chaveamento na lei de controle aumenta a robustezdo controle Backstepping contra incertezas paramétricas e a presença de perturbações como ovento e a turbulência do ar.
Finalmente, é importante destacar que essa é a primeira abordagem de Backstepping ve-torial (6D), ou seja, de 6 graus de liberdade, aplicada ao controle de um dirigível autônomo daliteratura, pelo que temos conhecimento. O recente trabalho de Yang et al. (2016) apresenta oprojeto de um controlador BSMC multivariável para um sistema com apenas 3 graus de liber-dade, além de diversas outras limitações.
6.3 Trabalhos futuros
A seguir serão apresentadas algumas sugestões para trabalhos futuros:A sintonia dos ganhos utilizados nos controladores é um dos aspectos que poderiam ser
melhorados em trabalhos futuros através do uso de ferramentas para teste e otimização, comopor exemplo a aplicação de algorítimos genéticos.
Uma análise de robustez e sensibilidade através de testes com a variação de parâmetros dedados fornecidos, possibilitaria uma medida de desempenho para os controladores implemen-tados.
A dependência dos controladores em relação ao conhecimento de dados do modelo po-deria ser resolvida com o uso de outras técnicas de controle integradas ao controlador principalBSMC.

131
A associação da função de Lyapunov do estimador de vento implementado à função deLyapunov do projeto dos controladores permitiria a realização da simulação do problema derastreamento de trajetória.
132
Referências Bibliográficas
ALRIFAI, M.T.; CHOW, J.H. e TORREY, D.A. A backstepping nonlinear control approach toswitched reluctance motors. In Decision and Control, 1998. Proceedings of the 37th IEEEConference on, v. 4, pp. 4652–4657. IEEE, 1998.
ARIAS, R.R.M. et al. Modelagem de um dirigível robótico com propulsão elétrica de quatromotores. 2014.
ÁVILA, C.L. Breve historia de los dirigibles. Ediciones Nowtilus SL, 2016.
AZCUE PUMA, J.L. et al. Estratégias de controle direto de torque para motores de induçãotrifásicos usando controladores fuzzy tipo takagi-sugeno e controladores por modos deslizantes.2013.
AZEVEDO, Bruno Avena. Design, trimming, stabilization and flight testing of tetheredaerostats. 2017. Tese (Doutorado). Instituto Tecnológico de Aeronáutica-ITA.
AZINHEIRA, J.; DE PAIVA, E.; BUENO, S.; BERGERMAN, M. e RAMOS, J. Extendeddynamic model for aurora robotic airship. In 14th AIAA Lighter Than Air Technical Com-mittee Convention and Exhibition. Akron, OHIO, 2001.
AZINHEIRA, J.; DE PAIVA, E.; RAMOS, J.G., J. e BUENO, S. Mission path following for anautonomous unmanned airship. In Proceedings 2000 ICRA. Millennium Conference. IEEEInternational Conference on Robotics and Automation., v. 2, pp. 1269–1275. IEEE, 2000.
AZINHEIRA, J.; DE PAIVA, E.C. e BUENO, S.S. Influence of wind speed on airship dynamics.Journal of Guidance, Control, and Dynamics, v. 25, n. 6, 1116–1124, 2002.
AZINHEIRA, J.; MOUTINHO, A. e CARVALHO, J. Lateral control of airship with uncertaindynamics using incremental nonlinear dynamics inversion. IFAC-PapersOnLine, v. 48, n. 19,69–74, 2015.
AZINHEIRA, J.; MOUTINHO, A. e DE PAIVA, E. Airship hover stabilization using a backs-tepping control aproach. Journal of Guidance, Control and Dynamics, v. 9, n. 9, 903–914,
133
Julio 2006.
AZINHEIRA, J.; MOUTINHO, A. e DE PAIVA, E. A backstepping controller for path-trackingof an underactuated autonomus airship. Int. Journal of Robust and Nonlinear Control, v. 19,n. 4, 418–441, Março 2008.
AZINHEIRA, J.R. e MOUTINHO, A. Hover control of an uav with backstepping design in-cluding input saturations. IEEE Transactions on Control Systems Technology, v. 16, n. 3,517–526, 2008.
BARTOLINI, G.; FRIDMAN, L.; PISANO, A. e USAI, E. Modern sliding mode control theory:New perspectives and applications, volume 375 of lecture notes in control and informationsciences. 2008.
BASRI, M.A.M.; HUSAIN, A.R. e DANAPALASINGAM, K.A. Robust chattering free backs-tepping sliding mode control strategy for autonomous quadrotor helicopter. InternationalJournal of Mechanical & Mechatronics Engineering, v. 14, n. 3, 36–44, 2014.
BEJI, L. e ABICHOU, A. Tracking control of trim trajectories of a blimp for ascent and descentflight manoeuvres. In International Journal of Control, v. 78. 2005.
BEJI, L.; ABICHOU, A. e BESTAOUI, Y. Stabilization of a nonlinear underactuated autono-mous airship - a combined averaging and backstepping approach. In International Workshopon Robot Motion and Control. 2002.
BENAMOR, A.; CHRIFI-ALAUI, L.; MESSAOUD, H.; CHAABANE, M. et al. Sliding modecontrol, with integrator, for a class of mimo nonlinear systems. Engineering, v. 3, n. 05, 435,2011.
BENJOVENGO, F.; DE PAIVA, E.; BUENO, S. e FERREIRA, P. Sliding mode control appro-aches for an autonomous unmanned airship. In 18th Lighter-Than-Air Systems TechnologyConference. Washington,USA, May 2009.
BENJOVENGO, Fabio Pereira. Controle por Modos Deslizantes para um Dirigível Robó-tico Autônomo. 2016. Tese (Doutorado).
134
BENNACEUR, S.; ABICHOU, A. e AZOUZ, N. Modelling and control of flexible airship. InAIP Intelligent Systems and Automation, 1st Mediterranean Conference. 2008.
BESTAOUI, Y. Lighter than air robots: guidance and control of autonomous airships. 2012.
BESTAOUI, Y. e HIMA, S. Trajectory tracking of a dirigible in a high constant altitude flight. InProceedings of the 5th IFAC symposium on Nonlinear control systems, Saint Petersburg,Russia. 2001.
BOUADI, H.; BOUCHOUCHA, M. e TADJINE, M. Tadjine “sliding mode control basedon backstepping approach for an uav type-quadrotor. In International Journal of AppliedMathematics and Computer Sciences, Vol. 4, No. 1. Citeseer, 2007.
BUENO, S.S. et al. Project AURORA: Towards an autonomous robotic airship. In Workshopon Aerial Robotics, IEEE International Conference on Intelligent Robots and Systems, pp.43–54. Lausanne, Switzerland, October 2002.
CARROLL, J.; SCHNEIDER, M. e DAWSON, D. Integrator backstepping techniques for thetracking control of permanent magnet brush dc motors. In Industry Applications SocietyAnnual Meeting, 1993., Conference Record of the 1993 IEEE, pp. 663–671. IEEE, 1993.
CARROLL, J.J.; GEOGHAN, A.J.; DAWSON, D.M. e VEDAGARBHA, P. A backsteppingbased computed torque controller for switched reluctance motors driving inertial loads. InControl Applications, 1995., Proceedings of the 4th IEEE Conference on, pp. 779–786.IEEE, 1995.
CARVALHO, J.; FERREIRA, P.; DE PAIVA, E.; AZINHEIRA, J.; RAMOS, J.; BUENO, S.;MAETA, S.; MIRISOLA, L.; FARIA, B.; BERGERMAN, M. e ELFES, A. Application of clas-sical and robust pi control to an unmanned robotic airship. In 9th International Symposiumon Intelligent Robotic Systems - SIRS 2001. Toulouse, France., 2001.
CHEN, M.Y. e LU, J.S. Application of adaptive variable speed back-stepping sliding modecontroller for pmlsm position control. Journal of Marine Science and Technology, v. 22, n. 3,392–403, 2014.
CHINGOZHA, T. e NYANDORO, O. Adaptive sliding backstepping control of quadrotor uav
135
attitude. IFAC Proceedings Volumes, v. 47, n. 3, 11043–11048, 2014.
DE CASTRO, C.D. et al. Sistema de navegação para veículos robóticos aéreos baseado naobservação e mapeamento do ambiente. 2007.
DE PAIVA, E.; BENJOVENGO, F.; MORIGUCHI, S. e FERREIRA, P. Sliding mode appro-aches for longitudinal control of an autonomous unmanned airship. In Journal of Control,Automation and Electrical Systems - (submetido). 2017.
DE PAIVA, E.; BUENO, S.; GOMES, S.; RAMOS, J. e BERGERMAN, M. A control systemdevelopment environment for aurora’s semi-autonomous robotic airship. In IEEE Internatio-nal Conference on Robotics and Automation., v. 3, pp. 2328–2335. IEEE, Detroit, MI, May1999.
DE PAIVA, E.; CARVALHO, J.; FERREIRA, P. e AZINHEIRA, J.R. An h2/hinf pid headingcontroller for aurora-i semi-autonomous robotic airship. In 14th Lighter-Than-Air-SystemsTechnology Conference. Ohio, USA, 2001.
DE PAIVA, E.C. e AZINHEIRA, J.R. Airship as800 dynamic model and simulation. TechnicalReport, Project AURORA, CenPRA-Campinas, 2001.
DE PAIVA, E.C.; AZINHEIRA, J.R.; RAMOS JR, J.G.; MOUTINHO, A. e BUENO, S.S.Project aurora: Infrastructure and flight control experiments for a robotic airship. Journal ofField Robotics, v. 23, n. 3-4, 201–222, 2006.
EDWARDS, C. e SPURGEON, S. Sliding mode control: theory and applications. CRCPress, 1998.
ELFES, A.; BUENO, S.S.; BERGERMAN, M.; DE PAIVA, E.C.; RAMOS JR, J.G. e AZI-NHEIRA, J.R. Robotic airships for exploration of planetary bodies with an atmosphere: auto-nomy challenges. Autonomous Robots, v. 14, n. 2-3, 147–164, 2003.
ESPINOZA, T.; DZUL, A.; LOZANO, R. e PARADA, P. Backstepping-sliding mode control-lers applied to a fixed-wing uav. Journal of Intelligent & Robotic Systems, v. 73, n. 1-4,67–79, 2014.
136
FARIA, B.G. et al. Identificação dinamica longitudinal de um dirigivel robotico autonomo.2005.
FILIPPOV, A. American mathematical society translations. Series, v. 2, n. 42, 199, 1964.
FOSSEN, T.I. e STRAND, J.P. Tutorial on nonlinear backstepping: Applications to ship control.Modeling, Identification and Control, v. 20, n. 2, 83, 1999.
FREDRIKSSON, J. Nonlinear control of turbocharged diesel engines. Control EngineeringLaboratory, Department of Signals and Systems, Chalmers University of technology, 1999.
FREEMAN, R.A. e KOTOTOVIC, P.V. Robust nonlinear control design: state-space and lya-punov techniques. 1996.
FUKAO, T.; FUJITANI, K. e KANADE, T. Image-based tracking control of a blimp. In Deci-sion and Control, 2003. Proceedings. 42nd IEEE Conference on, v. 5, pp. 5414–5419. IEEE,2003.
GOMES, S.B. An investigation of the flight dynamics of airships with application to theYEZ-2A. 1990. Tese (Doutorado). College of Aeronautics, Cranfield University.
GOMES, S.B.V. e RAMOS, J.G. Airship dynamic modeling for autonomous operation. InRobotics and Automation, 1998. Proceedings. 1998 IEEE International Conference on,v. 4, pp. 3462–3467. IEEE, 1998.
GROVLEN, A. e FOSSEN, T.I. Nonlinear control of dynamic positioned ships using onlyposition feedback: An observer backstepping approach. In Decision and Control, 1996., Pro-ceedings of the 35th IEEE Conference on, v. 3, pp. 3388–3393. IEEE, 1996.
HÄRKEGåRD, O. e GLAD, T. Flight control design using backstepping. 2000.
HUNG, J.Y.; GAO, W. e HUNG, J.C. Variable structure control: A survey. IEEE transactionson industrial electronics, v. 40, n. 1, 2–22, 1993.
HYGOUNENC, E.; JUNG, I.K.; SOUÈRES, P. e LACROIX, S. The autonomous blimp pro-
137
ject of LAAS-CNRS: Achievements in flight control and terrain mapping. The InternationalJournal of Robotics Research, v. 23, n. 4-5, 473–511, April-May 2004a.URL: http://ijr.sagepub.com/cgi/reprint/23/4-5/473.pdf
HYGOUNENC, E. e SOUERES, P. Automatic airship control involving backstepping techni-ques. In Systems, Man and Cybernetics, 2002 IEEE International Conference on, v. 6, pp.6–pp. IEEE, 2002.
HYGOUNENC, E.; SOUERES, P.; LACROIX, S. e JUNG, I.K. The autonomous blimp projectat laas-cnrs: Achievements in flight control and terrain mapping. International Journal ofRobotics Research, 2004b.
ITKIS, U. Control systems of variable structure. Halsted Press, 1976.
JIAN-GUO, G. e JUN, Z. Lateral path controller design for autonomous airship. In IntelligentHuman-Machine Systems and Cybernetics (IHMSC), 2010 2nd International Conferenceon, v. 1, pp. 276–279. IEEE, 2010.
KANELLAKOPOULOS, I.; KOKOTOVIC, P.V. e MORSE, A. A toolkit for nonlinear feedbackdesign. Systems & Control Letters, v. 18, n. 2, 83–92, 1992.
KHOURY, G.; GILLET, J.; MOWFORTH, E.; CHEESEMAN, I.; COOK, M.; WILSON, B.;HILLSDON, R.; HUNT, D.; HOWE, D.; MAYER, N.; CRAIG, J.; LUFFMAN, C. e BRA-DLEY, P. Airship Technology. 10. Cambridge University Press, 1999.
KHOURY, G.A. Airship technology, v. 10. Cambridge university press, 2012.
KOKOTOVIC, P. e ARCAK, M. Constructive nonlinear control: Progress in the 90s. In InvitedPlenary Talk, IFAC Congress, In: Proc. 14th IFAC World Congress, the Plenary and IndexVolume, pp. 49–77. 1999.
KOSHKOUEI, A.J. e ZINOBER, A.S. Adaptive backstepping control of nonlinear systemswith unmatched uncertainty. In Decision and Control, 2000. Proceedings of the 39th IEEEConference on, v. 5, pp. 4765–4770. IEEE, 2000.
KRSTIC, M.; FONTAINE, D.; KOKOTOVIC, P.V. e PADUANO, J.D. Useful nonlinearities and
138
global stabilization of bifurcations in a model of jet engine surge and stall. IEEE Transactionson Automatic Control, v. 43, n. 12, 1739–1745, 1998.
KRSTIC, M.; KANELLAKOPOULOS, I. e KOKOTOVIC, P.V. Nonlinear and adaptive con-trol design. Wiley, 1995.
LEE, S.J.; KIM, D.M. e BANG, H.C. Feedback linearization controller for semi station keepingof the unmanned airship. In AIAA 5th ATIO and16th Lighter-Than-Air Sys Tech. andBalloon Systems Conferences, p. 7343. 2005.
LIESK, Torsten. Control Design and Validation for an Unmanned, Finless Airship. 2012.Tese (Doutorado). McGill University.
LIU, J. e WANG, X. Advanced Sliding Mode Control for Mechanical Systems: Design,Analysis and MATLAB Simulation. Springer Science & Business Media, 2012.
LOZANO, R.; BROGLIATO, B. e LANDAU, I. Passivity and global stabilization of cascadednonlinear systems. IEEE Transactions on Automatic Control, v. 37, n. 9, 1386–1388, 1992.
MAETA, S.M. et al. Desenvolvimento da infra-estrutura embarcada do projeto aurora. 2001.
MARTON, A.S. et al. Controle linear de trajetória de dirigível robótico com propulsão quádru-pla. 2016.
MCLEAN, D. Automatic flight control systems(book). Englewood Cliffs, NJ, Prentice Hall,1990, 606, 1990.
MIRISOLA, Luiz Gustavo Bizarro. Exploiting attitude sensing in vision-based navigation,mapping and tracking including results from an airship. 2009. Tese (Doutorado). Citeseer.
MIRISOLA, L.G.B. et al. Desenvolvimento da estação de terra do projeto aurora. 2001.
MOUTINHO, A. Modeling and Nonlinear Control for airship autonomous flight. 2007.Tese (Doutorado). Universidade Técnica de Lisboa, Lisboa, Portugal.
139
MOUTINHO, A. e AZINHEIRA, J. Stability and robustness analysis of the aurora airshipcontrol system using dynamic inversion. In IEEE International Conference on Robotics andAutomation, pp. 2265–2270. IEEE, Barcelona, Espana, April 2005.
MOUTINHO, A.; AZINHEIRA, J.R.; DE PAIVA, E.C. e BUENO, S.S. Airship robust path-tracking: A tutorial on airship modelling and gain-scheduling control design. Control Engine-ering Practice, v. 50, 22–36, 2016.
RAMOS, J.G. Contribuição ao Desenvolvimento de Dirigíveis Robóticos. Março 2002. Tese(Doutorado). Universidade Federal de Snata Catarina, Florianopolis, Brasil.
RAMOS, J.; MAETA, S.; BERGERMAN, M.; BUENO, S.; MIRISOLA, L. e BRUCIAPA-GLIA, A. Development of a vrml/java unmanned airship simulating environment. In IEEE/RSJInternational Conference on Intelligent Robots and Systems (IROS1999), pp. 1354–1359.Kyongju, South Korea, October 1999.
RAMOS JR, J.; PAIVA, E.; CARVALHO, J.; FERREIRA, P.; AZINHEIRA, J.; BUENO, S.;MAETA, S.; MIRISOLA, L.; BERGERMAN, M.; FARIA, B. et al. Path tracking flight testof an autonomous unmanned robotic airship. In 3rd International Conference on Field andService Robotics, Helsink. 2001.
SANTOS, W.E.D. et al. Sistema para identificação da curvatura na junta prismática de um robôvia quaternions. 2003.
SEPULCHRE, R.; JANKOVIC, M. e KOKOTOVIC, P. Constructive nonlinear control. 1997.
SIRA-RAMIREZ, H. e LLANES-SANTIAGO, O. Adaptive dynamical sliding mode controlvia backstepping. In Decision and Control, 1993., Proceedings of the 32nd IEEE Conferenceon, pp. 1422–1427. IEEE, 1993.
SLOTINE, J.J. e LI, W. Adaptive manipulator control a case study. In Robotics and Auto-mation. Proceedings. 1987 IEEE International Conference on, v. 4, pp. 1392–1400. IEEE,1987.
SLOTINE, J.J.E.; LI, W. et al. Applied nonlinear control, v. 199. prentice-Hall EnglewoodCliffs, NJ, 1991.
140
STEINBERG, M.L. e PAGE, A.B. Nonlinear adaptive flight control with genetic algorithmdesign optimization. International Journal of Robust and Nonlinear Control, v. 9, n. 14,1097–1115, 1999.
STEVENS, B.L. e LEWIS, F.L. Aircraft Control and Simulation, capítulo 1, pp. 33–47. JohnWiley and Sons, Inc., USA, 1992.
STRAND, J.P.; EZAL, K.; FOSSEN, T.I. e KOKOTOVIC, P.V. Nonlinear control of ships: alocally optimal design. Preprints of the IFAC NOLCOS, v. 98, 732–738, 1998.
THOMASSON, P. Equations of motion of a vehicle in a moving fluid. Journal of Aircraft,v. 37, n. 4, 630–639, July 2000.
UTKIN, V.; GULDNER, J. e SHI, J. Sliding mode control in electro-mechanical systems,v. 34. CRC press, 2009.
VADIM, I.U. Survey paper variable structure systems with sliding modes. IEEE Transactionson Automatic control, v. 22, n. 2, 212–222, 1977.
VIDYASAGAR, M. Nonlinear systems analysis. 2002.
VIEIRA, H.; A., M.; DE PAIVA, E.; A., F. e BUENO, S.S., P. Controle de um dirigível robóticoautônomo de propulsão quádrupla utilizando modos deslizantes. In XIII Simpósio Brasileirode Automação Inteligente - SIBAI 2017 - (submetido). Porto Alegre, Brasil, Outubro 2017.
WANG, X.L. e SHAN, X.X. Airship attitude tracking system. Applied Mathematics andMechanics, v. 27, n. 7, 919–926, 2006.
WIMMER, D. e WELL, K. Instrumentation, identification and control of airship lotte. In 14thAIAA Lighter-Than-Air Conference and Exhibition, Akron, Ohio (USA). 2001.
XIA, G. e CORBETT, D.A. Cooperative control system of searching targets using unmannedblimps. In World Congress on Intelligent Control and Automation. 2004.
YANG, Y.; DU, J.; LIU, H.; GUO, C. e ABRAHAM, A. A trajectory tracking robust controller
141
of surface vessels with disturbance uncertainties. IEEE Transactions on Control SystemsTechnology, v. 22, n. 4, 1511–1518, 2014.
YANG, Y.; WU, J. e ZHENG, W. Positioning control for an autonomous airship. Journal ofAircraft, v. 53, n. 6, 1638–1646, 2016.
YONGMEI, W.; MING, Z.; ZONGYU, Z. e ZEWEI, Z. Trajectory tracking of a high altitudeunmanned airship based on adaptive feedback linearization. In Mechatronic Science, Elec-tric Engineering and Computer (MEC), 2011 International Conference on, pp. 2257–2261.IEEE, 2011.
ZHOU, J. e WEN, C. Adaptive backstepping control of uncertain systems: Nonsmoothnonlinearities, interactions or time-variations. Springer, 2008.
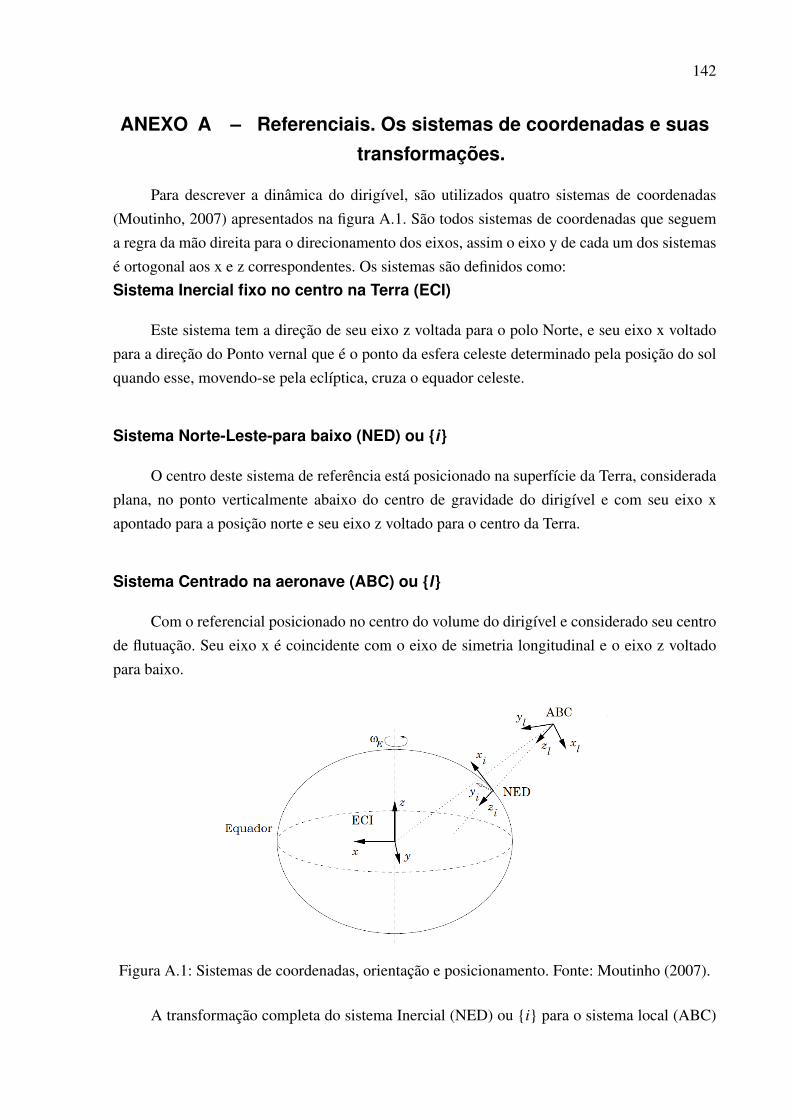
142
ANEXO A – Referenciais. Os sistemas de coordenadas e suastransformações.
Para descrever a dinâmica do dirigível, são utilizados quatro sistemas de coordenadas(Moutinho, 2007) apresentados na figura A.1. São todos sistemas de coordenadas que seguema regra da mão direita para o direcionamento dos eixos, assim o eixo y de cada um dos sistemasé ortogonal aos x e z correspondentes. Os sistemas são definidos como:Sistema Inercial fixo no centro na Terra (ECI)
Este sistema tem a direção de seu eixo z voltada para o polo Norte, e seu eixo x voltadopara a direção do Ponto vernal que é o ponto da esfera celeste determinado pela posição do solquando esse, movendo-se pela eclíptica, cruza o equador celeste.
Sistema Norte-Leste-para baixo (NED) ou i
O centro deste sistema de referência está posicionado na superfície da Terra, consideradaplana, no ponto verticalmente abaixo do centro de gravidade do dirigível e com seu eixo xapontado para a posição norte e seu eixo z voltado para o centro da Terra.
Sistema Centrado na aeronave (ABC) ou l
Com o referencial posicionado no centro do volume do dirigível e considerado seu centrode flutuação. Seu eixo x é coincidente com o eixo de simetria longitudinal e o eixo z voltadopara baixo.
Figura A.1: Sistemas de coordenadas, orientação e posicionamento. Fonte: Moutinho (2007).
A transformação completa do sistema Inercial (NED) ou i para o sistema local (ABC)
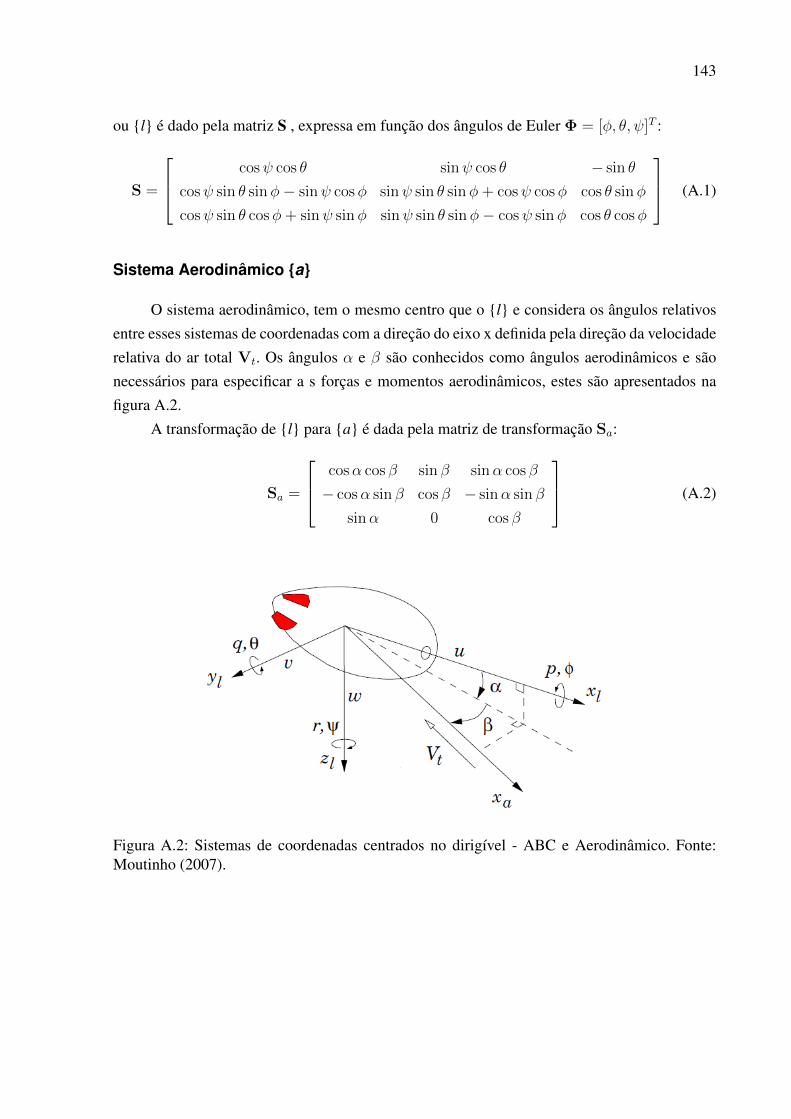
143
ou l é dado pela matriz S , expressa em função dos ângulos de Euler Φ = [𝜑, 𝜃, 𝜓]𝑇 :
S =
⎡⎢⎣ cos𝜓 cos 𝜃 sin𝜓 cos 𝜃 − sin 𝜃
cos𝜓 sin 𝜃 sin𝜑− sin𝜓 cos𝜑 sin𝜓 sin 𝜃 sin𝜑+ cos𝜓 cos𝜑 cos 𝜃 sin𝜑
cos𝜓 sin 𝜃 cos𝜑+ sin𝜓 sin𝜑 sin𝜓 sin 𝜃 sin𝜑− cos𝜓 sin𝜑 cos 𝜃 cos𝜑
⎤⎥⎦ (A.1)
Sistema Aerodinâmico a
O sistema aerodinâmico, tem o mesmo centro que o l e considera os ângulos relativosentre esses sistemas de coordenadas com a direção do eixo x definida pela direção da velocidaderelativa do ar total V𝑡. Os ângulos 𝛼 e 𝛽 são conhecidos como ângulos aerodinâmicos e sãonecessários para especificar a s forças e momentos aerodinâmicos, estes são apresentados nafigura A.2.
A transformação de l para a é dada pela matriz de transformação S𝑎:
S𝑎 =
⎡⎢⎣ cos𝛼 cos 𝛽 sin 𝛽 sin𝛼 cos 𝛽
− cos𝛼 sin 𝛽 cos 𝛽 − sin𝛼 sin 𝛽
sin𝛼 0 cos 𝛽
⎤⎥⎦ (A.2)
Figura A.2: Sistemas de coordenadas centrados no dirigível - ABC e Aerodinâmico. Fonte:Moutinho (2007).
144
ANEXO B – Estimador de vento.
No caso de não se conhecer o comportamento do vento, necessita-se de um estimador. Aa seguir será apresentado o projeto de um estimador para o controlador Backstepping adaptadodo exposto por Azinheira et al. (2002).
Seja a expressão do controlador BS da equação 4.24, cuja equação do controlador
f = MT+[−(Λ2 + K1)(Tx + Bp𝑤 −T𝑟x𝑟) − (Λ2K1 + Λ1) (𝜂 − 𝜂𝑟) +
−DΩ7Cx] −MKx− E𝑔Sg − F.(B.1)
Na lei de controle acima, a velocidade do vento p𝑤 é supostamente conhecida, no entanto,na realidade é um parâmetro de estimativa, de modo que a lei de controle correta deve ser:
f = MT+[−(Λ2 + K1)(Tx + Bˆp𝑤 −T𝑟x𝑟) − (Λ2K1 + Λ1) (𝜂 − 𝜂𝑟) +
−DΩ7Cx] −MKx− E𝑔Sg − F.(B.2)
Onde ˆp𝑤 é o vetor estimado do vento com 3 dimensões, dado em coordenadas globais.Recordando a equação 4.20:
x = T+ [−Λ2z2 −Λ1z1 −K1z1 −DΩ7Cx] (B.3)
com auxílio das equações 4.3, 4.7 e 4.9:
z1 = 𝜂 − 𝜂𝑟
z1 = − 𝑟
z2 = z1 + K1z1
obtém-se a equação:
Tx = −(Λ2 + K1)(Tx + Bˆp𝑤 −T𝑟x𝑟) − (Λ2K1 + Λ1) (𝜂 − 𝜂𝑟) −DΩ7Cx. (B.4)
Aplicando o erro de estimação definido por: p𝑤 = p𝑤 − ˆp𝑤 ou ˆp𝑤 = p𝑤 − p𝑤, temos:
Tx = −(Λ2+K1)(Tx+Bp𝑤−T𝑟x𝑟)−(Λ2K1+Λ1) (𝜂 − 𝜂𝑟)−DΩ7Cx+(Λ2+K1)Bp𝑤,(B.5)
o que é equivalente a modificação da equação B.3:
Tx = −Λ2z2 −Λ1z1 −K1z1 −DΩ7Cx + (Λ2 + K1)Bp𝑤. (B.6)
145
Recordando também da equação 4.1 temos:
= Tx + DΩ7Cx
= −Λ2z2 −Λ1z1 −K1z1 −DΩ7Cx + (Λ2 + K1)Bp𝑤 + DΩ7Cx
= −Λ2z2 −Λ1z1 −K1z1 + (Λ2 + K1)Bp𝑤. (B.7)
Agora pode-se completar a derivação de Lyapunov corretamente, o que leva em conside-ração a estimação do vento, substituindo o resultado da equação anterior na equação 4.16:
2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 + z𝑇2 ( + K1z1)
temos a equação:
2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 + z𝑇2 (−Λ2z2 −Λ1z1 −K1z1 + (Λ2 + K1)Bp𝑤 + K1z1)
2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 + z𝑇2 (−Λ2z2 −Λ1z1 + (Λ2 + K1)Bp𝑤). (B.8)
Tomando G = (𝛬2 + K1)B/2 e substituindo na equação anterior:
2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 + z𝑇2 (−Λ1z1 −Λ2z2 + 2Gp𝑤) (B.9)
2 = −z𝑇1Λ1K1z1 + z𝑇1Λ1z2 − z𝑇2Λ1z1 + z𝑇2 (−Λ2z2 + 2Gp𝑤) (B.10)
ou, como Λ1 é diagonal positiva z𝑇1Λ1z2 = z𝑇2Λ1z1:
2 = −z𝑇1Λ1K1z1 + z𝑇2 (−Λ2z2 + 2Gp𝑤) = −z𝑇1Λ1K1z1 − z𝑇2 (Λ2z2 − 2Gp𝑤). (B.11)
Lembrando que Λ2 também é uma matriz diagonal definida positiva, pode-se escreverz𝑇2Λ2z2 como z𝑇2Λ
𝑇0Λ0𝑧2 ou simplesmente y𝑇0 y0, com y0 = Λ0z2, tal que a derivada de Lya-
punov agora fica como:
2 = −z𝑇1Λ1K1z1 − y𝑇0 (y0 − 2Λ−10 Gp𝑤) (B.12)
e a partir da expansão de um quadrado pode-se escrever:
2 = −z𝑇1Λ1K1z1 − (y0 −Λ−10 Gp𝑤)𝑇 (y0 −Λ−1
0 Gp𝑤) + p𝑇𝑤G𝑇Λ−10 Λ0Gp𝑤 (B.13)
Ou
2 = −z𝑇1Λ1K1z1 − (y0 −Λ−10 Gp𝑤)𝑇 (y0 −Λ−1
0 Gp𝑤) + p𝑇𝑤G𝑇Gp𝑤. (B.14)

146
E agora considerando a função completa de Lyapunov com a inclusão da função proveni-ente do estimador de vento Azinheira et al. (2002),1 então ficamos com:
2𝑡 = 2 + 2𝑒 (B.15)
2𝑡 = −z𝑇1Λ1K1z1 − (y0 −Λ−10 Gp𝑤)𝑇 (y0 −Λ−1
0 Gp𝑤) + p𝑇𝑤G𝑇Gp𝑤 − p𝑇Q𝑝p− p𝑇𝑤Q𝑤p𝑤
(B.16)2𝑡 = −z𝑇1Λ1K1z1−(y0−Λ−1
0 Gp𝑤)𝑇 (y0−Λ−10 Gp𝑤)−p𝑇Q𝑝p−p𝑇𝑤(Q𝑤−G𝑇G)p𝑤. (B.17)
Que é negativa se:Q−G𝑇G > 0.
12𝑒 = −p𝑇Q𝑝p− p𝑇
𝑤Q𝑤p𝑤