TCC Leonardo Final 04-07-12JNB
44
UNIVERSIDADE FEDERAL DE SANTA CATARINA – UFSC DEPARTAMENTO DE ENGENHARIA ELÉTRICA – EEL CENTRO TECNOLÓGICO – CTC CAMPUS UNIVERSITÁRIO - TRINDADE - CEP 88040-900 FLORIANÓPOLIS - SANTA CATARINA Desenvolvimento de instrumentação para medição da componente tangencial de campo magnético em lâminas de aço Acadêmico: Leonardo Augusto Feler Orientador: Nelson Jhoe Batistela, Dr. Co-orientador: Mauricio Rigoni, M.Sc. Florianópolis, Julho de 2012.
Transcript of TCC Leonardo Final 04-07-12JNB
UNIVERSIDADE FEDERAL DE SANTA CATARINA – UFSC
DEPARTAMENTO DE ENGENHARIA ELÉTRICA – EEL
CENTRO TECNOLÓGICO – CTC CAMPUS UNIVERSITÁRIO - TRINDADE - CEP 88040-900
FLORIANÓPOLIS - SANTA CATARINA
Desenvolvimento de instrumentação para
medição da componente tangencial de
campo magnético em lâminas de aço
Acadêmico: Leonardo Augusto Feler
Orientador: Nelson Jhoe Batistela, Dr.
Co-orientador: Mauricio Rigoni, M.Sc.
Florianópolis, Julho de 2012.

ii
Desenvolvimento de instrumentação para
medição da componente tangencial de
campo magnético em lâminas de aço
Leonardo Augusto Feler
_______________________________
Nelson Jhoe Batistela, Dr.
Orientador
_______________________________
Mauricio Rigoni, M.Sc.
Co-orientador
_______________________________
Jean Vianei Leite, Dr.
Avaliador
_______________________________
Tiago Staudt, M.Sc.
Avaliador
iii
Resumo
Este trabalho de conclusão de curso aborda o desenvolvimento e implementação de
uma instrumentação para medição de campo magnético em lâminas de aço baseada no método
da conservação da componente tangencial. A instrumentação é composta de um conjunto de
sensores de campo magnético, circuitos eletrônicos de condicionamento de sinais, e placas de
aquisição de sinais com comunicação com computadores pessoais. Estudos teóricos e
experimentais acerca dos sensores de campo magnético por indução, do tipo bobina-H, são
apresentados neste trabalho, bem como as técnicas empregadas na confecção destes sensores.
Em virtude da baixa sensibilidade destes sensores, circuitos de amplificação e filtragem foram
implementados, condicionando assim os sinais para a etapa de aquisição. Após o
condicionamento, os sinais foram adquiridos por placas de aquisição e os dados foram
tratados numericamente por meio de instrumentos virtuais desenvolvidos em LabVIEW. Por
fim, são apresentados resultados dos ensaios de medição da componente tangencial de campo
magnético.

iv
Sumário
Lista de Figuras ........................................................................................................... v
Lista de Tabelas ........................................................................................................ vii
Capítulo 1: Introdução ................................................................................................. 8
1.1: Objetivos ...................................................................................................... 9
Capítulo 2: Revisão Bibliográfica .............................................................................. 10
2.1: Perdas e Métodos de medida .................................................................... 10
2.1.1: Medição de perdas em campos magnéticos alternados .................. 12
2.1.2: Perdas sob campos magnéticos rotacionais .................................... 14
2.2: Conservação da componente tangencial do campo magnético ................ 15
Capítulo 3: Materiais e Métodos ................................................................................ 18
3.1: Dispositivo sob Ensaio ............................................................................... 19
3.2: Sensoriamento: Sensor Bobina-H ............................................................. 20
3.2.1: Confecção de Sensores Bobina-H ................................................... 24
3.2.2: Aferição dos sensores ...................................................................... 26
3.3: Condicionamento de Sinais ....................................................................... 28
3.3.1: Filtragem........................................................................................... 29
3.3.2: Amplificação ..................................................................................... 29
3.4: Aquisição de Dados ................................................................................... 31
3.5: Tratamento Numérico de dados ................................................................ 32
Capítulo 4: Resultados .............................................................................................. 36
Capítulo 5: Considerações Finais e Perspectivas ..................................................... 41
5.1: Perspectivas .............................................................................................. 42
Capítulo 6: Referencias Bibliográficas ...................................................................... 43

v
Lista de Figuras
Figura 2.1: Curva de Histerese ....................................................................... 10
Figura 2.2: Corte em um material magnético mostrando as correntes
induzidas ................................................................................................................... 11
Figura 2.3: Quadro de Epstein ....................................................................... 12
Figura 2.4: Corte Quadro de Epstein .............................................................. 12
Figura 2.5: Configuração com duplo circuito do SST. .................................... 13
Figura 2.6: Configuração do RSST proposta por Enokizono et. al. [9] ........... 15
Figura 2.7: Refração do campo magnético .................................................... 16
Figura 2.8: Fronteira entre dois meios magnéticos ........................................ 16
Figura 3.1: Diagrama de blocos do sistema de medição ................................ 18
Figura 3.2: Fotografia do dispositivo sob ensaio ............................................ 19
Figura 3.3: Corrente induzida na espira devido a uma variação temporal do
campo magnético ...................................................................................................... 20
Figura 3.4: Tensão induzida nos terminais da espira interrompida ................ 21
Figura 3.5: Modelo elétrico para a bobina-sonda ........................................... 23
Figura 3.6: Geometria do Núcleo do Sensor .................................................. 24
Figura 3.7: Fotografia de um sensor construído ............................................. 25
Figura 3.8: Fotografia do suporte para os sensores ....................................... 26
Figura 3.9: Calibração dos Sensores ............................................................. 27
Figura 3.10: Diagrama de Blocos resumido do sistema de aquisição ............ 28
Figura 3.11: Filtro Passa-baixas passivo diferencial....................................... 29
Figura 3.12: Diagrama Esquemático de um amplificador de instrumentação 30
Figura 3.13: Fotografia dos amplificadores desenvolvidos no trabalho .......... 31
Figura 3.14: Fluxograma geral do software implementado em LabVIEW ...... 34

vi
Figura 3.15: Painel Frontal do Instrumento Virtual utilizado ........................... 35
Figura 4.1: Fotografia do ensaio de medição do campo magnético externo ao
transformador ............................................................................................................ 36
Figura 4.2: Forma de onda da corrente de magnetização do transformador . 36
Figura 4.3: Forma de onda do campo magnético externo ao transformador . 37
Figura 4.4: Fotografia da montagem do aparato experimental ....................... 38
Figura 4.5: Forma de onda da componente tangencial de campo magnético.
.................................................................................................................................. 39
Figura 4.6: Fotografia da montagem do aparato experimental ....................... 39
Figura 4.7: Corrente de alimentação do circuito magnético ........................... 40
Figura 4.8: Formas de onda da componente tangencial de campo magnético
.................................................................................................................................. 40

vii
Lista de Tabelas
Tabela 3.1: Dados dos Sensores ................................................................... 25
Tabela 3.2: Erros Relativos Percentuais dos Sensores ................................. 28
Tabela 3.3: Dados dos ADCs ......................................................................... 32

8
Capítulo 1: Introdução
Com a demanda crescente no setor elétrico, novas tecnologias são procuradas para
atender às exigências do setor. Novos produtos, processos e materiais são buscados pelo
mercado, principalmente quando se pode melhorar a eficiência energética. Por isso cada vez
mais se aprimora os dispositivos para atender as tendências tecnológicas, econômicas e de
conservação do meio ambiente. Sob este aspecto, um dos focos de pesquisa hoje em dia são a
determinação e melhoria das perdas em materiais ferromagnéticos, já que estes materiais são
componentes fundamentais nos equipamentos utilizados na indústria.
Desenvolver equipamentos com o maior rendimento possível é um dos principais
focos na indústria. E para efetuar tal tarefa, determinar e minimizar as perdas eletromagnéticas
são fatores de extrema importância, pois como os materiais magnéticos compõem parte
principal dos dispositivos eletromagnéticos, é neste ponto que as melhorias mais significantes
podem ser efetuadas.
Uma das principais partes no processo de determinação de perdas eletromagnéticas é a
obtenção do valor do campo magnético no interior do material. Vários métodos de obtenção
do campo magnético são estudados, entre eles a estimação pelo cálculo utilizando a corrente
de magnetização do circuito magnético ou através da medição da componente tangencial do
campo magnético no exterior da lâmina.
Neste trabalho é desenvolvida uma instrumentação para a estimação de campos
magnéticos através da componente tangencial, que é um método baseado na utilização de
sensores de campo magnético para a obtenção da componente tangencial. Vários sensores,
como: SQUIDs (Superconducting Quantum Interference Device), sensor de Efeito Hall,
sensores magnéto-resistivos e sensores por indução são utilizados para a medição de campos
magnéticos. O desempenho de cada um deles depende da amplitude e frequência dos campos
a serem medidos.
Os sensores por indução do tipo bobina-H (H-coil, em inglês) são aplicados mais
comumente devido à sua relativa facilidade de confecção. Outras vantagens deste tipo de
sensor são sua excelente linearidade e imunidade à componente ortogonal do campo
magnético.

9
1.1: Objetivos
Este trabalho tem como objetivo principal o desenvolvimento de um sistema para
medir o campo magnético a partir de sua componente tangencial. Definem-se metas que irão
compor o caminho a ser trilhado para a conclusão do trabalho. Os seguintes itens são
definidos como metas principais do trabalho:
Projetar e confeccionar sensores de campo magnético por indução do tipo
bobina-H para campos na faixa de 1 Hz a 100 Hz;
Projetar e construir circuitos eletrônicos de filtragem e amplificação para o
condicionamento dos sinais provenientes dos sensores, de modo que seja
possível utilizar todos os sensores ao mesmo tempo e em qualquer faixa de
amplitude e de freqüências definidas anteriormente;
Implementar na plataforma LabVIEW® um software de aquisição e tratamento
numérico dos dados coletados dos sensores, em tempo real e oferecendo uma
interface para que o usuário possa visualizar tais dados;
Realizar medições de campos magnéticos com a instrumentação para validar o
funcionamento da mesma.

10
Capítulo 2: Revisão Bibliográfica
Neste capitulo são apresentados os principais conceitos sobre correntes induzidas e
conservação da componente tangencial do campo magnético, além das aplicações onde estes
fenômenos têm influência, como a avaliação de perdas magnéticas em aços elétricos.
2.1: Perdas e Métodos de medida
Determinar as perdas em materiais magnéticos laminados em chapas é um tema de
interesse da comunidade científica, principalmente por ainda não existir um modelo definitivo
para sua previsão [1].
A metodologia mais utilizada para estimação, análise e caracterização de materiais
com respeito às perdas magnéticas é o princípio da separação, ou seja, as perdas totais na
lâmina são devido a três tipos de perdas: perdas por histerese, perdas por correntes de
Foucault e perdas excedentes, sendo que as duas últimas são também chamadas por perdas
dinâmicas [2].
Um material sob a ação de um campo magnético )(tH apresenta uma característica
)(HB representada pela seguinte equação
HB (2.1)
Para alguns materiais esta curva é aproximadamente linear. Porém, para materiais
ferromagnéticos, ela apresenta uma forma de histerese, conforme mostra a Figura 2.1 – que
pode ser mais ou menos pronunciada na sua forma de sigmóide dependendo do material
ferromagnético.
Figura 2.1: Curva de Histerese

11
Este fenômeno de histerese ocorre devido à locomoção das paredes dos domínios
magnéticos [3], que exigem certa quantidade de energia para trocarem as suas polaridades
magnéticas e magnetizar o material. Esta energia gasta pelos deslocamentos das paredes dos
domínios magnéticos é então denominada perda por histerese.
A perda por correntes de Foucault é originada das correntes induzidas no material.
Estas correntes, induzidas pela variação de fluxo magnético, percorrem o material em forma
de anéis fechados, como representado na Figura 2.2, tendo como um limitador a resistividade.
As perdas por correntes de Foucault em lâminas de aço dependem diretamente da espessura da
lâmina, condutividade do material, frequência e amplitude da indução magnética.
Figura 2.2: Corte em um material magnético mostrando as correntes induzidas
Como dispositivos eletromagnéticos operam em uma frequência fixa, para tentar
minimizar esse efeito, as lâminas são cortadas com espessura mais fina possível. Isto explica o
porquê de os circuitos magnéticos de equipamentos serem constituídos de várias lâminas
finas, ao invés de utilizar apenas uma massa de material. Fazendo isso, a formação de grandes
anéis de correntes induzidas no material é limitada.
As perdas excedentes estão incluídas nas perdas dinâmicas, mas ainda não há uma
teoria definitiva. Atualmente o modelo mais aceito foi proposto por Bertotti [4], o qual é
baseado em uma análise estatística da organização dos domínios e paredes magnéticas. Tais
perdas estão separadas em outra classe devido ao fato de que o cálculo clássico das perdas por
correntes de Foucault não leva em consideração a divisão do material em domínios
magnéticos.

12
2.1.1: Medição de perdas em campos magnéticos alternados
Dentre os métodos mais utilizados para a medição de perdas em campos magnéticos
alternados estão: o método do quadro de Epstein e o método SST (Single Sheet Test).
O quadro de Epstein é um dispositivo sugerido por Burgwin em 1936 [5] e até hoje é o
mais utilizado na medição de perdas magnéticas em lâminas de aço. Este quadro é constituído
de dois enrolamentos: um enrolamento primário, responsável pela geração do campo
magnético e um enrolamento secundário responsável pela medição do fluxo magnético
induzido. O quadro de Epstein é composto de quatro bobinas, ligadas em série, para cada
enrolamento, conforme mostra a Figura 2.3.
Figura 2.3: Quadro de Epstein
As amostras de lâminas de aço são colocadas no interior dos enrolamentos (Figura 2.4)
formando um circuito magnético. A norma brasileira NBR5161
[6] prevê a utilização de no mínimo doze lâminas para realizar o ensaio.
Figura 2.4: Corte Quadro de Epstein

13
As perdas são calculadas de um modo indireto através das seguintes grandezas
elétricas: )(tip é a corrente do enrolamento primário, que é uma imagem do campo magnético
)(tH , e a tensão induzida no enrolamento secundário )(tvs . A indução )(tB é a integral
proporcional da forma de onda da tensão no secundário )(tvs . As duas equações que
descrevem as relações entre as grandezas elétricas e magnéticas são:
)()( til
NtH p
m
p (2.2)
T
s
s
dttvSN
tB )(1
)( (2.3)
onde pN e sN são o número de espiras dos enrolamentos primário e secundário,
respectivamente; ml é o caminho médio magnético; S é a área de seção magnética efetiva; T
é o período do sinal.
Para o cálculo das perdas é possível usar wattímetros, amperímetros e voltímetros,
como previsto em norma. Mas a abordagem mais atual é adquirir os sinais oriundos do
quadro, utilizando placas de aquisição de dados, e através de tratamento numérico adequado
em um computador, calcular as perdas.
O SST (Single Sheet Tester) o difere do quadro de Epstein basicamente por utilizar
uma única lâmina para o ensaio, ter o seu próprio núcleo magnético e poder empregar
métodos diretos de medição de campo magnético através de sensores de campo magnético [7]
como o sensor bobina-H [8]. Como o SST possui seu próprio núcleo, varias configurações são
possíveis. Contudo a mais recomendada pelas normas internacionais é a de duplo circuito
magnético, representada na Figura 2.5.
Figura 2.5: Configuração com duplo circuito do SST.

14
A grande vantagem do método SST é o número reduzido de lâminas necessárias para o
ensaio. Utiliza-se de apenas uma enquanto o método do quadro de Epstein necessita de 12
lâminas. Porém são necessários vários ensaios para obter uma “característica média” do
material e no quadro de Epstein a magnetização do circuito é mais homogenia do que no SST.
2.1.2: Perdas sob campos magnéticos rotacionais
Nas ranhuras de máquinas elétricas e em algumas regiões dos núcleos de
transformadores, a indução magnética se comporta de uma maneira diferente do que no
quadro de Epstein ou no SST. Ela não tem um comportamento apenas alternante no espaço,
mas também muda a direção em pontos diferentes do material magnético Erro! Fonte de
referência não encontrada.], formando campos rotacionais.
Levando em consideração este fato, os ensaios convencionais, como os mostrados na
seção anterior, não fornecem informações suficientes para caracterização e avaliação das
perdas, pois possuem apenas uma fonte de campo magnético. Então, para avaliar as perdas e
caracterizar os materiais sob esta circunstância existe um método denominado Teste
Rotacional de Chapa Única (RSST – Rotacional Single Sheet Test, em inglês). Ele pode ser
realizado hoje graças à evolução dos computadores e circuitos amplificadores mais precisos e
eficientes.
Para a execução deste teste, pode ser utilizado um dispositivo semelhante ao proposto
por Enokizono et. al. [9], apresentado na Figura 2.6. Nele estão dispostos sensores de campo
magnético e de indução com enrolamentos perpendiculares entre si, para que possam ser
medidos campos em duas direções. Os sinais medidos por estes sensores são então
condicionados via circuitos eletrônicos analógicos e posteriormente os dados são tratados
numericamente em um computador onde são calculadas as perdas.

15
Figura 2.6: Configuração do RSST proposta por Enokizono et. al. [9]
Em Silva Erro! Fonte de referência não encontrada.] é feita uma análise de vários
aspectos envolvendo as disposições e tipos de sensores de indução magnético e campo
magnético, inclusive sobre o sensor Bobina-H, que será abordado no próximo capitulo deste
texto.
2.2: Conservação da componente tangencial do campo magnético
Como visto na seção anterior, alguns métodos para avaliação de perdas magnéticas
utilizam métodos diretos de estimação de campos magnéticos a partir de sensores de campo
magnético. Os campos no interior do material são calculados a partir do principio de
conservação da componente tangencial do campo magnético.
O fenômeno descrito em livros clássicos de eletromagnetismo [3,10] é tratado a partir
de um sistema que possui dois, ou mais meios, onde as permeabilidades magnéticas são
diferentes. O campo magnético sofre refração ao atravessar a fronteira entre um meio e outro,
apresentando uma diferença angular, como mostrado na Figura 2.7.

16
Figura 2.7: Refração do campo magnético
Para explicar o fenômeno de conservação da componente tangencial do campo
magnético, utiliza-se a Lei de Gauss para campos magnéticos
0dSB (2.4)
e a lei de Ampère
IdlH (2.5)
Considera-se uma região de fronteira entre dois meios magnéticos distintos 1 e 2
caracterizados, respectivamente, por 1 e 2 , como na Figura 2.8.
Figura 2.8: Fronteira entre dois meios magnéticos
Aplicando a Lei de Ampère no caminho fechado formado por abcda, onde a corrente
de interface é denotada por I e considerada normal ao caminho abcda, obtém-se
2222122211
hH
hHLH
hH
hHLHLI nnftgnnftgf (2.6)
Como a região de interesse é muito próxima à interface, considera-se que a distância
h é muito pequena, ou seja, 0h . Então, tem-se

17
ftgftgf LHLHLI 21 (2.7)
e, consequentemente, pode-se escrever
tgtg HHI 21 (2.8)
Isto mostra que a componente tangencial do campo magnético não se conserva quando
há corrente elétrica em um dos meios. Porém em uma situação onde a fronteira esteja livre de
corrente, tem-se
tgtg HH 210 (2.9)
ou seja,
tgtg HH 21 (2.10)
Sendo assim, para a condição onde não há corrente na interface entre os dois meios,
magnéticos a componente tangencial do campo magnético se conserva, conforme explicitado
na Equação 2.10.
18
Capítulo 3: Materiais e Métodos
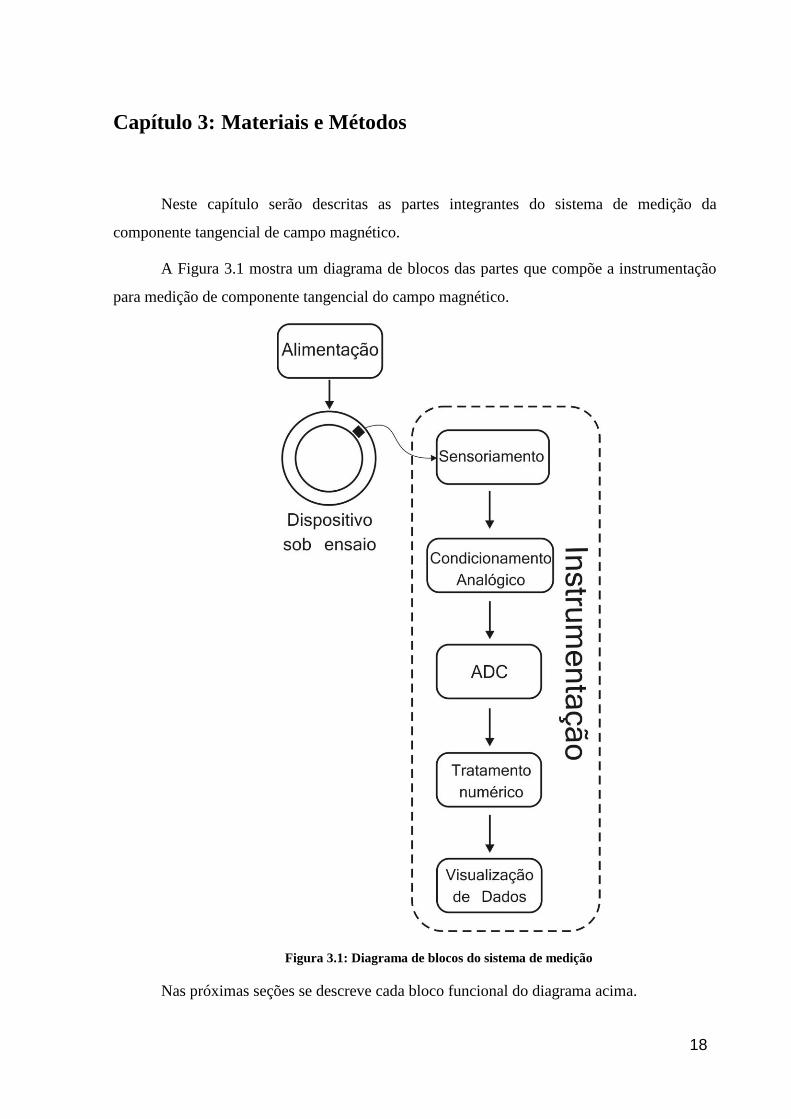
Neste capítulo serão descritas as partes integrantes do sistema de medição da
componente tangencial de campo magnético.
A Figura 3.1 mostra um diagrama de blocos das partes que compõe a instrumentação
para medição de componente tangencial do campo magnético.
Figura 3.1: Diagrama de blocos do sistema de medição
Nas próximas seções se descreve cada bloco funcional do diagrama acima.

19
3.1: Dispositivo sob Ensaio
Utilizou-se uma topologia em forma de aro (coroa circular) para o circuito magnético,
como a fotografia mostra a Figura 3.2. No caso deste trabalho optou-se por utilizar a própria
lâmina sob ensaio como o circuito magnético.
Figura 3.2: Fotografia do dispositivo sob ensaio
Utilizando este formato para o circuito magnético, o campo magnético tem uma
distribuição espacial e vetorialmente comportada, o que é contrário, por exemplo, às
alterações significativas na direção do vetor do campo magnético no quadro de Epstein na
região de acesso nos vértices do quadro. Outra vantagem é simplicidade da determinação do
caminho médio magnético ml no toróide e é dada pela Equação 3.1 [11].
i
e
ie
m
R
R
RRl
ln
2 (3.1)
Neste trabalho foi utilizada uma lâmina, no formato de um aro, de espessura 3,3mm,
raio interno 0,8m e raio externo de 0,88m. Além disso, para que um campo magnético
pudesse ser imposto ao circuito magnético um enrolamento com 1000 espiras foi
confeccionado.
Como este dispositivo foi construído de modo que o circuito magnético seja a própria
lâmina sob ensaio, o enrolamento não foi distribuído por todo o perímetro, deixando arcos
sem enrolamentos para realizar as medições de campo.

20
3.2: Sensoriamento: Sensor Bobina-H
Existem várias métodos de mensurar campos magnéticos. Cada técnica apresenta
vantagens e desvantagens dependendo da aplicação a que se destinam. Entre todas estas
técnicas conhecidas, os sensores por indução são praticamente os únicos que podem ser
confeccionados pelo próprio usuário. Esta é uma grande vantagem deste tipo de sensor, pois
pode ser construído especificamente para a aplicação desejada, além de ter um menor custo.
Outra grande vantagem é a sua faixa de operação virtualmente ilimitada, tanto em amplitude
quanto em frequência [12].
Para apresentar o princípio de funcionamento do sensor bobina-H é conveniente
introduzir o conceito do sensor elementar. Constituído por apenas uma espira de material
condutor, o sensor elementar é o mais simples dos sensores de campo magnético por indução.
O fenômeno que descreve o funcionamento deste sensor é dado pela equação de Maxwell
t
HErot
0 (3.2)
ou seja, uma variação temporal do campo magnético H
, cria um campo elétrico E
rotacional
à direção do primeiro. A permeabilidade magnética é representada por 0 .
Se uma espira constituída por um material condutor for imersa em um campo
magnético )(tH
, o campo elétrico E
rotacional induzirá uma corrente elétrica ii na espira,
conforme a Figura 3.3.
Figura 3.3: Corrente induzida na espira devido a uma variação temporal do campo magnético
A circulação da corrente elétrica estabelecida na espira, por sua vez, cria um campo
magnético rotacional à direção do seu fluxo [3]. Este efeito é formalizado pela equação de
Maxwell (3.3) para baixas frequências.
21
JHrot i
(3.3)
Na equação (3.3), J
é a densidade superficial de corrente elétrica que percorre um condutor
de seção transversal fioS . A relação entre a corrente I e o módulo de J
é descrita pela
equação
fioS
IJ (3.4)
As duas equações de Maxwell (3.2) e (3.3) interagem, de maneira que a direção da
circulação da corrente induzida na espira seja tal que o campo magnético criado pela Equação
3.3 tenha sentido oposto ao campo magnético mensurado (externo). O sentido da corrente e do
campo magnético criado por ela são explicados pela “regra da mão direita” [3].
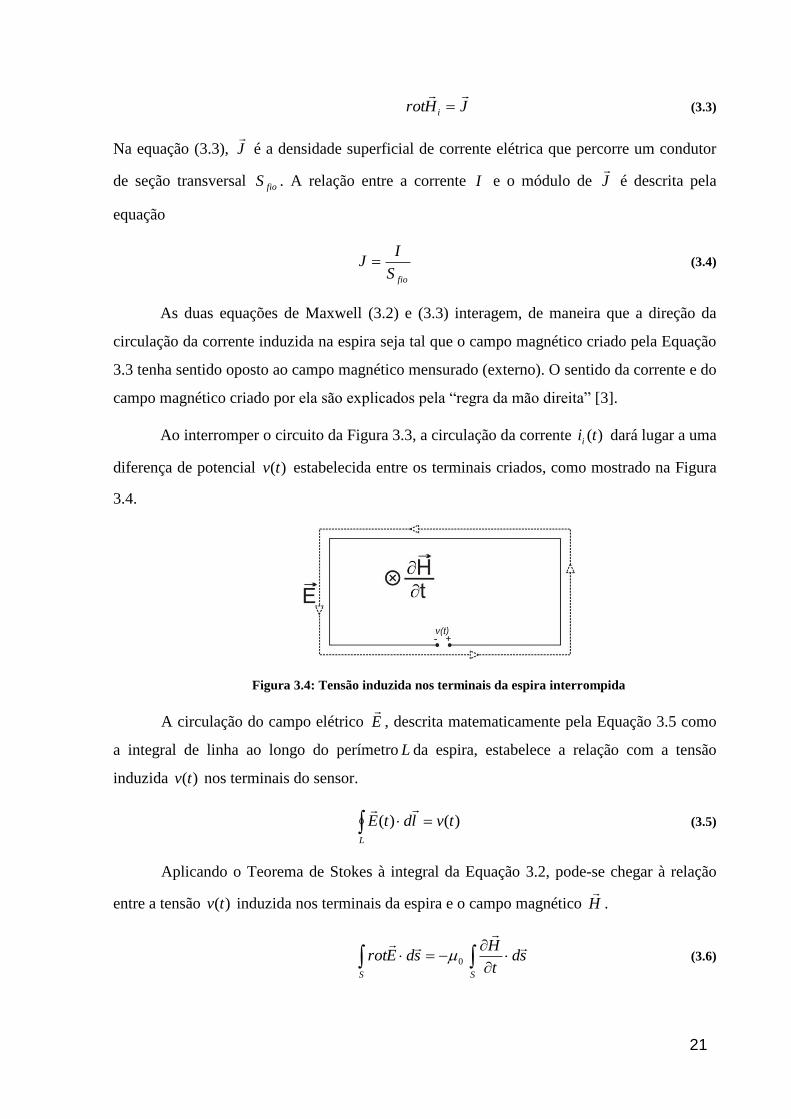
Ao interromper o circuito da Figura 3.3, a circulação da corrente )(tii dará lugar a uma
diferença de potencial )(tv estabelecida entre os terminais criados, como mostrado na Figura
3.4.
Figura 3.4: Tensão induzida nos terminais da espira interrompida
A circulação do campo elétrico E
, descrita matematicamente pela Equação 3.5 como
a integral de linha ao longo do perímetro L da espira, estabelece a relação com a tensão
induzida )(tv nos terminais do sensor.
)()( tvldtEL
(3.5)
Aplicando o Teorema de Stokes à integral da Equação 3.2, pode-se chegar à relação
entre a tensão )(tv induzida nos terminais da espira e o campo magnético H
.
S S
sdt
HsdErot
0 (3.6)

22
)(
0
SL S
sdt
HldE
(3.7)
onde S é a área interna da espira.
A partir das Equações 3.5 e 3.7, chega-se a Equação 3.8 que nos fornece a relação
generalizada entre a tensão induzida e o campo magnético
S
sdt
Htv
0)( (3.8)
Se o campo H
for homogêneo na área da espira, ou seja, que varie em amplitude
apenas na direção normal ao plano da espira e dependa somente do tempo, pode-se considerar
o seguinte
dt
Hd
t
H
(3.9)
A partir desta simplificação, a Equação 3.8 pode ser escrita como
S
dsdt
dHtv 0)( (3.10)
assim,
dt
dHStv 0)( (3.11)
A Equação 3.11 é a Lei de Faraday-Lenz escrita em termos do campo magnético. Esta
lei representa a resposta de um sensor constituído por uma única espira retangular.
A derivada do campo também é responsável por oferecer uma amplificação natural das
componentes harmônicas do campo magnético. Seja um campo )(tH dado pela Equação 3.12
...)52()32()12()( tfCsentfBsentfAsentH (3.12)
O sinal do sensor )(tv , de acordo com a Equação (3.11), é dado pela Equação (3.13). Cada
componente harmônica do sinal )(tv é multiplicada pelo inteiro que representa a ordem de sua
harmônica (1,3,5, etc).
...])52cos(5)32cos(3)12cos(1[2)( 0 tfCftfBftfAfStv (3.13)

23
Entretanto, quando se está interessado no campo magnético, faz-se necessária a
integração do sinal )(tv (Equação 3.14).
dttvS
tH )(1
)(0
(3.14)
Em virtude da baixa sensibilidade do sensor de uma espira, a amplitude do sinal de
tensão induzida )(tv é também pode ser muito baixa relativamente. Uma forma de aumentar a
sensibilidade do sensor, sem aumentar a área da espira, é utilizar vários sensores elementares
em série, configurando o que se conhece por bobina, sendo construída pelo enrolamento
contínuo do fio condutor sobre um suporte físico não-magnético. Desta forma a tensão
induzida nos terminais do sensor é multiplicada pelo número de espiras N ,
dt
dHSNtv 0)( (3.15)
O aumento do número de espiras melhora a sensibilidade do sensor, entretanto gera
capacitâncias parasitas distribuídas ao longo do enrolamento. O valor destas capacitâncias
depende de fatores construtivos das bobinas como: espessura do dielétrico do fio, distribuição
das espiras e a forma geométrica do enrolamento. Estas capacitâncias distribuídas podem ser
representadas por um único parâmetro concentrado, que é um capacitor entre os terminais da
bobina. O circuito da Figura 3.5 apresenta o modelo elétrico de uma bobina.
Figura 3.5: Modelo elétrico para a bobina-sonda
No diagrama esquemático acima, L é a indutância própria da bobina, R a resistência do
enrolamento e C representa a capacitância parasita. Esta capacitância altera a função de
transferência do sensor, acrescentando termos relacionados a frequência, caracterizada por
uma resposta de um filtro passa-baixas de segunda ordem cuja frequência de corte é dada por
LCfc
2
1 (3.16)

24
Portanto, a faixa de frequência do sensor é limitada pelos elementos parasitas próprios
do sensor.
3.2.1: Confecção de Sensores Bobina-H
Na medição da componente tangencial do campo magnético, o tipo de sensor por
indução mais utilizado é o sensor bobina-H. Este tipo de sensor é muito utilizado porque ele
possui um baixo custo e pode ser confeccionado manualmente, permitindo assim que os
sensores sejam otimizados para uma aplicação especifica.
Na confecção destes sensores algumas considerações devem ser feitas. Uma delas é em
relação ao suporte físico do sensor, que deve ser constituído de um material cuja superfície
seja lisa para facilitar o enrolamento do sensor. Neste trabalho foi escolhido o fenolite como
suporte físico do sensor por adequar-se com facilidade à formatação necessária aos núcleos
desenvolvidos. A Figura 3.6 mostra a geometria das bobinas desenvolvidas.
Figura 3.6: Geometria do Núcleo do Sensor
Dadas as pequenas dimensões geométricas do sensor, é necessário utilizar um número
relativamente grande de espiras para aumentar sua sensibilidade. Isto implica em um
enrolamento com várias camadas, as quais devido à disposição das espiras umas sobre as
outras, tornará a área uma variável de determinação imprecisa. Mas, pode-se estimar uma
seção média do sensor, dada por
)2
( eim
eelS
(3.17)

25
onde l é o comprimento efetivo do sensor; ie é a espessura do núcleo; ee é a espessura
externa da última camada. O erro proveniente do cálculo desta área pode ser corrigido a partir
de um processo de calibração dos sensores, que será descrito na próxima seção.
A confecção das bobinas-H utilizadas neste trabalho foi feita em uma bobinadeira
microcontrolada desenvolvida no GRUCAD [12]. A Figura 3.7 mostra uma fotografia de um
dos sensores construídos.
Figura 3.7: Fotografia de um sensor construído
O levantamento dos valores de indutância e capacitância dos sensores confeccionados
foi feito com um analisador de impedâncias BK Precision Bench LCR/ESR 889B Meter do
GRUCAD. A Tabela 3.1 mostra os parâmetros para os quatro sensores utilizados nos estudos
que serão apresentados no Capítulo 4.
Tabela 3.1: Dados dos Sensores
Sensor N esp mS [m²] L [µH] C [nF] R [Ω]
1 500 13,76x10-6
506,3 56,0 94,73
2 500 13,79x10-6
575,5 63,5 95,29
3 500 13,71x10-6
494,5 62,5 84,32
4 500 13,69x10-6
458,3 71,3 87,44

26
Um suporte foi desenvolvido e construído para manter os sensores fixos e alinhados na
posição desejada, pois erros devido ao posicionamento podem afetar a medição do valor
verdadeiro do campo. A Figura 3.8 mostra uma fotografia do suporte para os sensores.
Figura 3.8: Fotografia do suporte para os sensores
Com este suporte é possível comportar até cinco sensores empilhados, sendo que o
primeiro está em contato direto com a lâmina.
3.2.2: Aferição dos sensores
O processo de medição de uma grandeza física é inevitavelmente acompanhado de
erros de incertezas. Por este motivo, a medida de uma grandeza física também é chamada de
estimativa, já que o “valor real” não pode ser conhecido.
No desenvolvimento de uma instrumentação, procura-se descobrir e examinar as
possíveis fontes de erros com o objetivo de atenuar estes efeitos. Como nem todas as fontes de
erros podem ser determinadas procura-se calibrar o instrumento de medição em relação a um
padrão, de maneira que esta incerteza seja estimada em relação ao padrão. Existem várias
maneiras de calibrar um equipamento ou instrumento de medida. Neste trabalho será feita a
aferição a partir da comparação entre um valor fornecido por um equipamento tomado como
referência e o valor medido pelos sensores.
O erro relativo percentual entre as duas medidas foi escolhido para a realização da
aferição, pois apesar de simples, fornece uma avaliação consideravelmente satisfatória sobre a

27
qualidade das medidas. A Equação 3.18 é a expressão do erro relativo percentual, onde x é o
valor da medida feita pelo instrumento a ser avaliado e x é o valor adotado como referência.
100%
x
xxE (3.18)
Os sensores foram aferidos por meio de um campo magnético de referência criado no
interior de um solenóide, que possuí um comprimento muito maior que o raio, garantindo
assim a homogeneidade do campo magnético em seu interior [3]. O solenóide é alimentado
por um gerador de funções, permitindo assim, a alteração da amplitude e frequência do campo
magnético gerado. Em Rigoni [12] são detalhadas mais informações sobre a construção do
solenóide.
A calibração foi feita ajustando a amplitude do campo magnético para 125 A/m, sendo
um valor de amplitude de campo típica na superfície de uma lâmina de aço magnetizada na
região do joelho. A Figura 3.9 apresenta as formas de ondas adquiridas do processo de
calibração dos sensores.
Figura 3.9: Calibração dos Sensores
Devido à linearidade destes sensores, o fator de ajuste necessário para aferi-los pode
ser determinado em qualquer faixa de frequência (neste caso 60Hz), sendo que seu valor não
será modificado nas demais faixas.
A Tabela 3.3 apresenta os valores calculados do erro relativos calculados através da
Equação 3.23.

28
Tabela 3.2: Erros Relativos Percentuais dos Sensores
Sensor Valor de Referência [A/m] Valor medido [A/m] Erro Percentual %
1 125,00 125,95 0, 760
2 125,00 124,13 0, 696
3 125,00 123,83 0, 936
4 125,00 120,55 3,56
Os sensores apresentaram um baixo erro relativo. O único sensor que apresentou um
erro maior que 1% foi o Sensor 4. Mesmo assim, o erro foi inferior a 4%.
3.3: Condicionamento de Sinais
A tensão induzida nos terminais do sensor bobina-H é na verdade uma composição de
vários sinais de tensão, sendo eles sinais de informação, sinais de ruídos internos e próprios
dos equipamentos, e sinais de interferência externa [12].
Conhecendo, ou estimando, algumas características básicas dos sinais de informação,
tais como espectro de frequência, amplitude do sinal e referência, é possível projetar filtros e
amplificadores para que os sinais de ruído e interferência sejam atenuados ou suprimidos,
restando assim o sinal de informação.
O diagrama de blocos a seguir fornece uma visão geral do sistema de medição
desenvolvido para condicionar o sinal dos sensores.
Figura 3.10: Diagrama de Blocos resumido do sistema de aquisição
Nas próximas seções se descreve cada bloco funcional do diagrama mostrado na
Figura 3.9.

29
3.3.1: Filtragem
A etapa de filtragem consiste em um filtro passa-baixas passivo e diferencial. A
função do filtro é atenuar as interferências de alta frequência presentes no ambiente antes do
estágio de amplificação. Estas componentes de alta frequência podem saturar os
amplificadores de instrumentação, caso não sejam suprimidas ou pelo menos atenuadas.
O filtro da Figura 3.11 é uma topologia constituída de uma rede resistor-capacitor
(RC) simétrica, com um ponto de referencia central, de primeira ordem, com atenuação de
20dB por década para sinais de diferenciais e de modo comum. Os componentes utilizados
neste filtro devem ser componentes de precisão, pois a assimetria entre as constantes de tempo
de cada braço (que podem ocorrer caso os valores dos componentes sejam diferentes)
conduzirão a uma limitação da taxa de rejeição de modo comum (CMRR Common-Mode
Rejection Ratio) do circuito. Mesmo com a possível diminuição do CMRR devido à precisão
dos componentes, ainda esta configuração é mais vantajosa do que utilizar um filtro do tipo
diferencial com alguma técnica de conversão do sinal diferencial em um sinal de terminação
simples, e depois filtrá-lo utilizando topologias convencionais.
Figura 3.11: Filtro Passa-baixas passivo diferencial
3.3.2: Amplificação
Como discutido na Seção 3.2, os valores de tensão induzida na saída dos sensores são
relativamente de baixas amplitudes, na ordem de nano a mili volts. Devido a isto, faz-se
necessário um estagio de amplificação do sinal com elevados valores de ganho e também que
a relação sinal/ruído torne-se suficientemente alta na entrada do estágio de amostragem.
Assim, a escolha do amplificador deve levar em consideração alguns pontos importantes, tais

30
como entrada diferencial, rejeição de modo comum [12,15], alta impedância de entrada e uma
grande largura de banda para ganhos elevados. Como já utilizado em [12], optou-se em
escolher um amplificador de instrumentação.
O amplificador de instrumentação é uma estrutura composta por três amplificadores
operacionais (Figura 3.12), com várias vantagens em relação aos amplificadores operacionais
convencionais. Essa arquitetura permite a fabricação de circuitos integrados com tolerâncias
de 0,01% nos resistores de realimentação, fazendo com que a rejeição de modo comum seja
muito maior do que nos amplificadores operacionais comuns.
Figura 3.12: Diagrama Esquemático de um amplificador de instrumentação
Os amplificadores operacionais A1 e A2 da Figura 3.12 estão conectados na
configuração de seguidores de tensão que atribuem ao circuito com uma alta impedância de
entrada, da ordem de Giga Ohms. Impedâncias de entrada desta magnitude impedem o
carregamento elétrico da fonte de sinal. Por último, o amplificador operacional A3 é um
amplificador diferencial, que tem como função amplificar a diferença de tensão da saída dos
amplificadores A1 e A2. Em amplificadores de instrumentação comerciais, o resistor RG é
colocado externamente para que o ganho do amplificador, dado pela Equação 3.23, possa ser
ajustado.
1
221R
R
R
RG
G
F (3.19)
O componente utilizado foi o INA118P da Texas Instruments [14]. Este circuito
integrado (CI) atende a todas as especificações, com exceção da largura de banda para ganhos
elevados. Porém, como neste trabalho nenhum campo com mais de 100 Hz será mensurado, a
largura de banda não afeta as medições.

31
A Figura 3.13 mostra uma fotografia da fonte de alimentação e do dispositivo que
contém os amplificadores, ambos construídos neste trabalho.
Figura 3.13: Fotografia dos amplificadores desenvolvidos no trabalho
3.4: Aquisição de Dados
Neste trabalho, adquirir dados consiste em converter o sinal analógico do sensor em
um sinal digital que possa ser interpretado por um software. A aquisição é dada por um
processo denominado de amostragem [17] que é dividida em dois processos: discretização e
quantização.
A discretização é feita por um amostrador, que recolhe amostras em intervalos de
tempos iguais. A frequência de amostragem é o inverso do período de amostragem, ela indica
quantas vezes por segundo o sinal é amostrado. Esta frequência deve obedecer ao Teorema da
Amostragem [17]. Para um sinal de limitado em M Hz, a menor frequência de amostragem
que se pode ter é o dobro da largura ao qual o sinal é limitado
Mf s 2 (3.1)
onde sf é a freqüência de amostragem.
Caso esta condição não for respeitada ocorrerá o fenômeno de recobrimento espectral,
onde componentes de frequências superiores à metade da frequência de amostragem se
sobrepõem ao espectro do sinal original, distorcendo o mesmo [17]. Neste trabalho utilizou-se

32
uma frequência de amostragem muito superior à frequência dos sinais medidos, garantindo
que não haja recobrimento espectral.
A quantização do sinal é a maneira de dividir a amplitude do sinal analógico em vários
níveis. O número de níveis depende da resolução do ADC (Analog Digital Converter)
(número de bits utilizado para representar o valor da amostra) e da faixa dinâmica (valores
máximos e mínimos de tensão) de entrada do ADC.
A menor variação do sinal analógico que um ADC pode detectar é chamada de largura
de código, definida por
R
DC
2 (3.20)
onde C é a largura de código, D é a faixa dinâmica de entrada do ADC e R é o número de
bits de resolução do amostrador. Quanto menor a largura de código, melhor o sinal analógico
será representado após a amostragem.
Após a discretização e a quantização, o sinal é armazenado em um buffer de memória,
e está disponível para o tratamento numérico.
A Tabela 3.3 apresenta os dados dos ADC da National Instruments utilizados neste
trabalho.
Tabela 3.3: Dados dos ADCs
ADC Resolução Frequência de Amostragem
PCI-MIO-16E-1 12 bits 1,25 MS/s
USB 6259 16 bits 1,25 MS/s
3.5: Tratamento Numérico de dados
O tratamento numérico pode ser feito de algumas maneiras, as principais são o uso de
microcontroladores (no caso de um sistema único de aquisição) e por meio de softwares.
Neste trabalho foi feita a opção pelo uso do software LabVIEW para o tratamento numérico
dos dados.

33
O LabVIEW (Laboratory Virtual Instrument Engineering Workbench) é uma
linguagem de programação gráfica (por blocos) criada pela empresa Norte-Americana
National Instruments. A programação é feita de acordo com o modelo de fluxo de dados, o
que oferece a esta linguagem vantagens para a aquisição de dados e para a manipulação dos
mesmos.
Os programas em LabVIEW são chamados de instrumentos virtuais ou, VIs (Virtual
Instruments). Os VIs são compostos pelo painel frontal, contendo a interface com o usuário e
pelo diagrama de blocos, onde é feito o código propriamente dito. Em um VI, podem ser
implementadas várias funções de forma versátil que, usando a linguagem de programação
gráfica (linguagem G), pode simular equipamentos de medição, controlar equipamentos, fazer
geração e aquisição de sinais. Como o VI é um software, ele pode ser programado para vários
usos, sendo necessário apenas um hardware compatível para que se possam fazer as mais
diversas atividades de aquisição e geração de sinais elétricos.
O programa final não é processado por um interpretador, que reduziria sua velocidade
de execução, mas sim compilado, o que permite que programas feitos no LabVIEW sejam
executados tão rápidos quanto outros programas feitos em linguagens de alto nível.
Assim, para o tratamento numérico dos dados, desenvolveu-se neste trabalho um VI. A
Figura 3.14 apresenta o fluxograma do software (VI) desenvolvido.

34
Figura 3.14: Fluxograma geral do software implementado em LabVIEW

35
Como apresentado no Capítulo 3, o sinal da tensão induzida no terminal dos sensores é
uma função da derivada do campo magnético. Sendo assim, para obter o campo magnético é
necessário fazer uma integração do vetor de pontos adquiridos. A primeira etapa do
tratamento de dados é atenuar ao máximo as tensões de offset introduzidas pelos circuitos de
condicionamento de sinais e pelo ADC. Esta componente contínua pode causar um erro
bastante significativo no cálculo do valor médio do sinal. Para contornar este problema, o
valor médio do vetor adquirido da tensão (vetor da forma de onda da tensão) é calculado e
decrementado do mesmo a componente contínua do sinal.
Posteriormente a etapa de integração, a forma de onda do campo magnético é
apresentada, conforme mostra a Figura 3.15. Esta figura apresenta o Painel Frontal do VI
desenvolvido neste trabalho. Valores de pico e RMS, bem como a frequência fundamental do
campo mensurado, são calculados e também apresentados no painel frontal. Todos estes
cálculos são feitos em tempo real. A representação digital do sinal adquirido pode ser salva
em arquivos de formato de texto para uma posterior análise dos dados.
Figura 3.15: Painel Frontal do Instrumento Virtual utilizado
36
Capítulo 4: Resultados
Neste capítulo são apresentados resultados de medições utilizando a instrumentação
desenvolvida no trabalho.
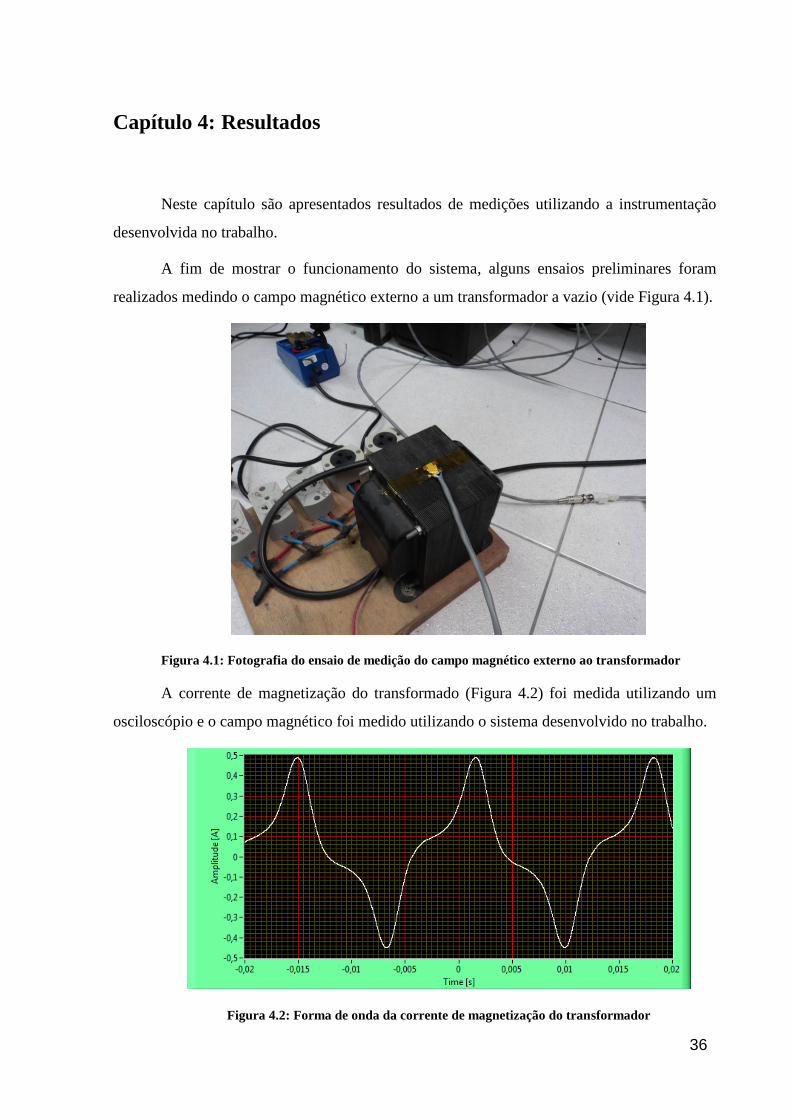
A fim de mostrar o funcionamento do sistema, alguns ensaios preliminares foram
realizados medindo o campo magnético externo a um transformador a vazio (vide Figura 4.1).
Figura 4.1: Fotografia do ensaio de medição do campo magnético externo ao transformador
A corrente de magnetização do transformado (Figura 4.2) foi medida utilizando um
osciloscópio e o campo magnético foi medido utilizando o sistema desenvolvido no trabalho.
Figura 4.2: Forma de onda da corrente de magnetização do transformador

37
Figura 4.3: Forma de onda do campo magnético externo ao transformador
Analisando qualitativamente as formas de onda da Figura 4.2 e da Figura 4.3, percebe-
se que as formas de onda são semelhantes, conforme o esperado, mostrando assim que o
sistema pode medir satisfatoriamente o campo magnético.
A Figura 4.6 mostra a montagem do aparato experimental utilizado durante os ensaios
de medição da componente tangencial de campo magnético. O enrolamento foi alimentado
por um variador de tensão e a corrente foi monitorada por um amperímetro e um osciloscópio.
De posse do valor de pico da corrente pode-se calcular o valor de pico do campo magnético
imposto ao circuito magnético através da equação
p
m
p
p il
NH (4.1)
onde pN é o número de espiras do primário; ml é o caminho médio magnético; pi é a
corrente de pico injetada no enrolamento.

38
Figura 4.4: Fotografia da montagem do aparato experimental
Procurou-se manter a mesma condição operacional durante o ensaio. A Figura 4.5
mostra a forma de onda da componente tangencial de campo magnético medida. O valor de
pico do campo magnético calculado por meio da corrente elétrica foi de 536,41 A/m e o valor
de pico medido a partir da instrumentação foi de 50,65 A/m. Nota-se que o valor está abaixo
do esperado. Um dos fatores a que se pode atribuir a diferença entre o valor calculado pela
corrente e o valor medido com a instrumentação é a relação entre a resistência e a reatância
indutiva do circuito magnético. Neste caso a indutância reativa de 21,11Ω (em regime
senoidal a 60Hz) não é suficientemente maior que a resistência de 6Ω, fazendo com que a
forma de onda do campo magnético não tenha o comportamento típico de um circuito
predominantemente indutivo.
39
Figura 4.5: Forma de onda da componente tangencial de campo magnético.
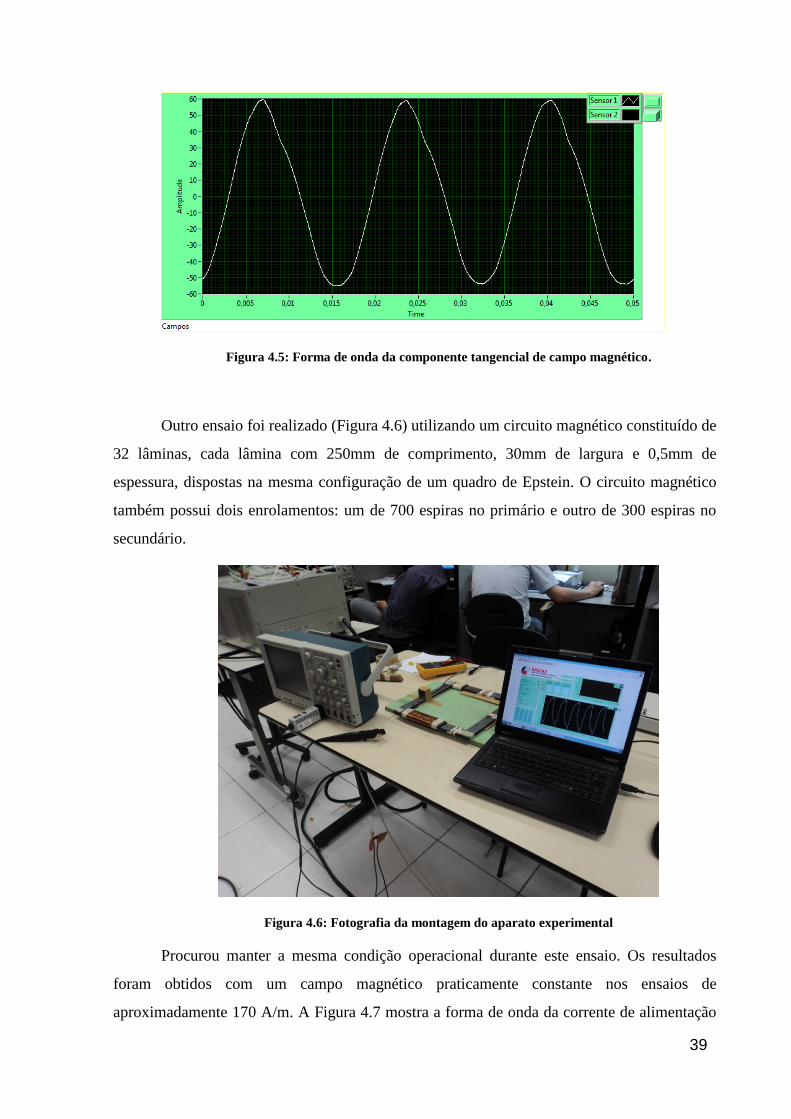
Outro ensaio foi realizado (Figura 4.6) utilizando um circuito magnético constituído de
32 lâminas, cada lâmina com 250mm de comprimento, 30mm de largura e 0,5mm de
espessura, dispostas na mesma configuração de um quadro de Epstein. O circuito magnético
também possui dois enrolamentos: um de 700 espiras no primário e outro de 300 espiras no
secundário.
Figura 4.6: Fotografia da montagem do aparato experimental
Procurou manter a mesma condição operacional durante este ensaio. Os resultados
foram obtidos com um campo magnético praticamente constante nos ensaios de
aproximadamente 170 A/m. A Figura 4.7 mostra a forma de onda da corrente de alimentação

40
do circuito e a Figura 4.8 a forma de onda da componente tangencial de campo magnético. O
valor de pico calculado por meio da corrente elétrica é de 171,27. O valor de pico do campo
magnético medido foi de 168,55 A/m, tendo uma diferença de 1,59%. Percebe-se que há um
problema de simetria em relação ao eixo dos tempos na forma de onda do campo medido. Este
problema pode ser causado pela ausência de um casamento de impedâncias ideal nos circuitos
de condicionamento de sinais.
Figura 4.7: Corrente de alimentação do circuito magnético
Figura 4.8: Formas de onda da componente tangencial de campo magnético

41
Capítulo 5: Considerações Finais e Perspectivas
O objetivo principal deste trabalho de conclusão de curso foi o desenvolvimento de
uma instrumentação para medição da componente tangencial de campo magnético. Para
atingir este objetivo, o trabalho englobou: construção de um circuito magnético onde as
medições foram feitas; a confecção de sensores de campo magnético por indução do tipo
bobina-H; desenvolvimento de circuitos eletrônicos para o condicionamento de sinais; e ainda
a implementação de softwares, na plataforma LabVIEW, tratamento numérico dos dados
provenientes dos sensores.
Os sensores de campo magnético por indução demonstraram que, apesar de possuírem
um principio de funcionamento simples, apresentam algumas características pouco discutidas
na literatura. Neste estudo, a amplitude do sinal do sensor é relativamente baixa, havendo
poucos trabalhos abordando pontos de operação semelhantes em trabalhos publicados. Neste
sensor, há uma amplificação natural das componentes harmônicas do campo magnético. No
que diz respeito à confecção dos sensores, devido às pequenas dimensões geométricas, um
elevado número de espiras deve ser utilizado para aumentar a sensibilidade do sensor. Este
fato implica em um enrolamento com várias camadas, o que pode tornar a determinação da
área do sensor imprecisa. Porém, esta imprecisão pode ser corrigida a partir de um processo
de calibração dos sensores, como a realizada no trabalho.
A baixa amplitude do sinal dos sensores e o ambiente de medições com muitos ruídos
proporcionam uma baixa relação sinal-ruído na saída do sensor. Em uma etapa de
condicionamento de sinais, por meio de circuitos eletrônicos, utilizando topologias simples e
eficazes de filtros e amplificadores, uma melhor relação sinal-ruído foi proporcionada. Os
resultados finais mostraram que estes circuitos eletrônicos necessitam ainda serem
aprimorados, pois eles apresentaram uma falta de simetria que pode ter sido causada pela falta
de um casamento de impedâncias dos circuitos. Sob este aspecto um estudo mais aprimorado
sobre estes circuitos deve ser feito a fim de melhorar o desempenho da instrumentação.
O sistema de aquisição e tratamento dos dados utilizando a plataforma LabVIEW é
muito vantajoso. Pois, através de ADCs (Analog-Digital Converters) em placas de aquisição
feitas pela mesma empresa do LabVIEW, os códigos do software de aquisição e tratamento

42
numérico tornam-se muito simples, reduzindo assim o tempo gasto e proporcionando ao
usuário uma interface bastante pratica e intuitiva.
Os resultados apresentados no Capítulo 4 mostram que a instrumentação desenvolvida
neste trabalho de conclusão de curso é capaz de medir satisfatoriamente a componente
tangencial de campo magnético. Porém melhorias podem ser feitas nas partes que compõem a
instrumentação.
5.1: Perspectivas
A seguir algumas propostas para melhorias e continuidade deste trabalho:
Melhoria das técnicas de confecção dos sensores de campo magnético,
principalmente para aperfeiçoar a precisão em campos de baixa amplitude;
Estudos sobre os circuitos eletrônicos: casamento de impedâncias, novas
topologias de amplificação e filtragem e diminuir o tamanho dos circuitos
analógicos, por exemplo, utilizando tecnologia SMD;
Fazer o tratamento numérico em microcontroladores, assim dispensado o uso
de um computador, dando uma maior mobilidade e consequentemente
diminuindo o tamanho do instrumento;
Estudo de blindagem eletromagnética dos sensores, pois os mesmos podem
apresentar um nível considerável de interferência em suas medidas;
Estudo de posicionamento dos sensores, pois a variação na posição dos
sensores na lâmina de aço influencia na estimação do campo magnético;
Estudo acerca da influência de correntes induzidas na lâmina de aço nos
valores medidos da componente tangencial do campo magnético.

43
Capítulo 6: Referencias Bibliográficas
[1] Silva, P. A. Bancada para Ensaios de Materiais Ferromagnéticos em Chapa única sob Campos
Rotacionais. Florianópolis 2007.
[2] Batistela, N. J. Caracterização e Modelagem Eletromagnética de Lâminas de Aço ao Silício.
Florianópolis, 2001.
[3] Bastos, J.P.A. Eletromagnetismo para Engenharia: Estática e Quase-estática. 2ª Edição.
Editora UFSC, 2008.
[4] BERTOTTI, G. General Properties of Power Losses in Soft Ferromagnetic Materials. IEEE
Transactions on Magnetics, v. 39, n.2, março 2003.
[5] SIEVERT, J. Recent Advances in the Onde and Two-Dimensional Magnetic Measurement
Technique for Eletrical Sheet Steel. IEEE Transactions on Magnetics, v. 26, n. 5, p. 2553-2558, setembro
1990.
[6] ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. Produtos Laminados Planos de
Aços para Fins Elétricos - verificação das propriedades, NBR 5161. 1996.
[7] Tanaka, T.; Ishibahara, Y.; Nakaji, M.; Todaka, T. Comparision between the H-coil method
and the magnetizing current method for the single sheet tester.
[8] Tumanski, S. A mult-coil sensor for tangencial magnetic field investigations.
[9] ENOKIZONO, M.; SUZUKI, T.; SIEVERT, J; XU, J. Rotational Power Loss of Silicon Steel
Sheet. IEEE Transactions on Magnetics, v. 26, n. 5, p. 2562-2564. Setembro, 1990.
[10] SADIKU, M.N.O. Elementos de Eletromagnetismo. 3ª Edição. Editora Bookman. 2004.
[11] STAUDT, Tiago. Estudo de Transformadores de Corrente Utilizados em Instrumentação.
Florianópolis, 2009.
[12] RIGONI, M. Desenvolvimento e Aplicações de Sensores de Campo Magnético por Indução.
Florianópolis, 2009.
[13] IEEE Std 1308-1994. Recommended Practice for Instrumentation: Specifications for
Magnetic Flux Density and Electric Field Strength Meters - 10Hz to 3kHz. IEEE, 1995.
[14] INA118 - Precision, Low Power, Instrumentation Amplifier, tech. rep., Texas Instruments,
April 1998.
[15] T.L Santos. Desenvolvimento de um Sistema Embarcado para medição de corrente.
Florianópolis, 2010.

44
[16] TLC04/MF4A-50, TLC14/MF4A-100 Butterworth Fourth-order Low-pass Switched-
Capacitor Filters, tech. rep., Texas Instruments, March 1995.
[17] B.P. Lathi, Sinais e Sistemas Lineares. Porto Alegre: Bookman, segunda ed., 2007.