
uAULA18
22
Sinais e Sistemas Professor: Rafael Antunes Nóbrega 1
-
Upload
thiago-scher -
Category
Documents
-
view
214 -
download
0
description
Aula de SS
Transcript of uAULA18

Sinais e Sistemas
Professor: Rafael Antunes Nóbrega
1

Continuação...• CAPÍTULO 1: Introdução:
– Sinais de tempo contínuo e de tempo discreto;– Energia e Potência de um sinal– Transformações de variáveis independentes;– Sinais periódicos– Sinais senoidais e exponenciais;– Funções impulso unitário e degrau unitário;– Sistemas de tempo contínuo e de tempo discreto;– Propriedades básicas de sistemas;
• CAPÍTULO 2: Sistemas lineares invariantes no tempo:– Representações de sinais em termos de impulso;– Convolução.– Esquema de Interconexões– Propriedades de sistemas LIT– Equações diferenciais lineares com coeficientes constantes– Funções de singularidade
• CAPÍTULO 3: Série de Fourier– Perspectiva histórica– Resposta dos sistemas LIT às exponenciais complexas– Representação de sinais periódicos de tempo contínuo– Convergência da série de Fourier– Propriedades da série de Fourier de tempo contínuo– Representação de sinais periódicos de tempo discreto– Propriedades da série de Fourier de tempo discreto– Série de Fourier e sistemas LIT– Filtragem– Exemplos filtros contínuos– Exemplos filtros discretos
• CAPÍTULO 4: A transformada de Fourier de tempo contínuo– Representações de sinais aperiódicos (tempo contínuo)– TF para sinais periódicos– Propriedades da TF de tempo contínuo– A propriedade da convolução– A propriedade da multiplicação– Sistemas caracterizados por equações diferenciais lineares com coeficientes constantes
• CAPÍTULO 5: A transformada de Fourier de tempo discreto– Representações de sinais aperiódicos (tempo discreto)– TF para sinais periódicos– Propriedades da TF de tempo discreto– A propriedade da convolução– A propriedade da multiplicação– Dualidade– Sistemas caracterizados por eq. Diferenças lineares com coef.s constantes 2
visto
Sistemas caracterizados por equações de diferenças lineares com coefs. constantes
3
Transformada de Fourier de tempo discreto
Exemplo: y[n] – ay[n-1] = x[n]
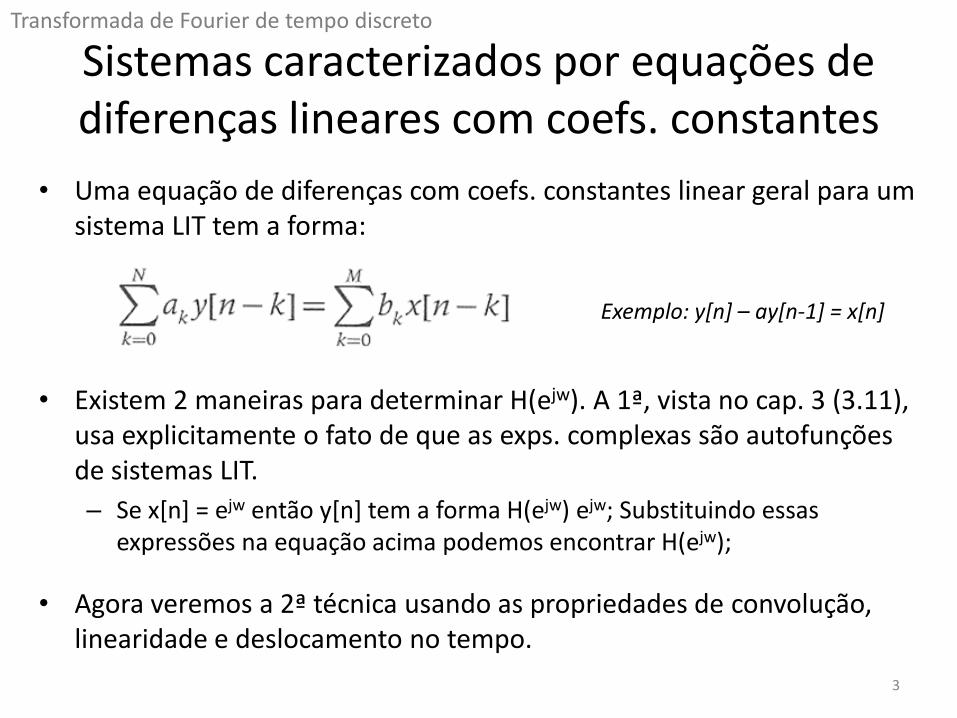
• Uma equação de diferenças com coefs. constantes linear geral para um sistema LIT tem a forma:
• Existem 2 maneiras para determinar H(ejw). A 1ª, vista no cap. 3 (3.11), usa explicitamente o fato de que as exps. complexas são autofunções de sistemas LIT.
– Se x[n] = ejw então y[n] tem a forma H(ejw) ejw; Substituindo essas expressões na equação acima podemos encontrar H(ejw);
• Agora veremos a 2ª técnica usando as propriedades de convolução, linearidade e deslocamento no tempo.
4
Sistemas caracterizados por equações de diferenças lineares com coefs. constantes
Transformada de Fourier de tempo discreto
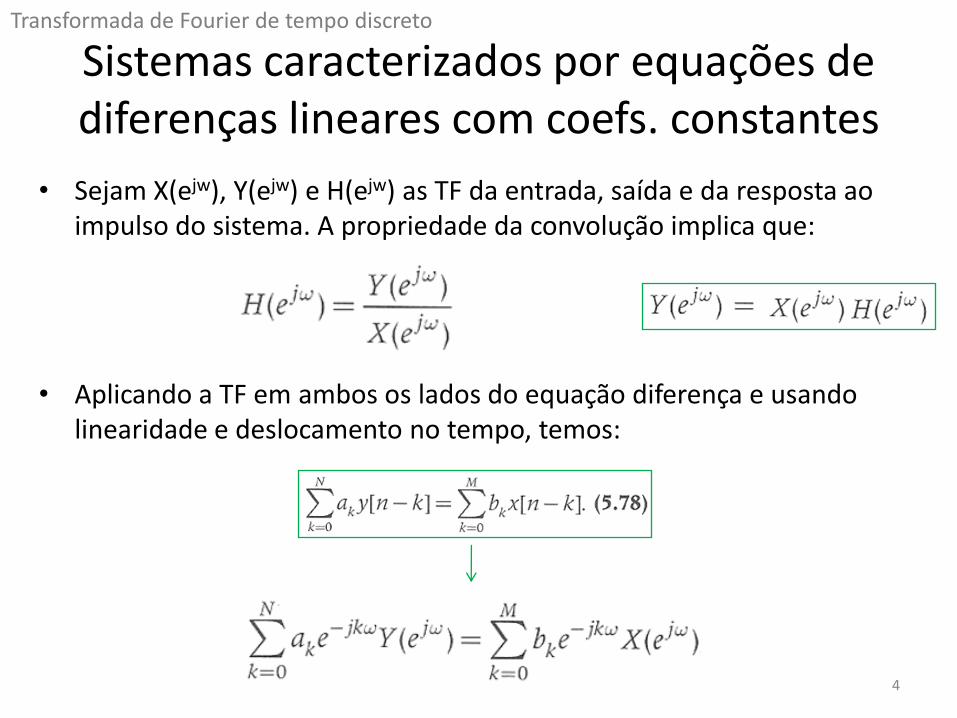
• Sejam X(ejw), Y(ejw) e H(ejw) as TF da entrada, saída e da resposta ao impulso do sistema. A propriedade da convolução implica que:
• Aplicando a TF em ambos os lados do equação diferença e usando linearidade e deslocamento no tempo, temos:

5
Sistemas caracterizados por equações de diferenças lineares com coefs. constantes
Transformada de Fourier de tempo discreto
• Ou de modo equivalente:
• Comparando esta equação com a sua equivalente no caso contínuo, vemos que ambas são uma razão de polinômios, mas em tempo discreto os polinômios estão em e-jw.
• Repare que essa equações podem ser escritas por inspeção.
NUMERADORDENOMINADOR

6
Sistemas caracterizados por equações de diferenças lineares com coefs. constantes
Transformada de Fourier de tempo discreto
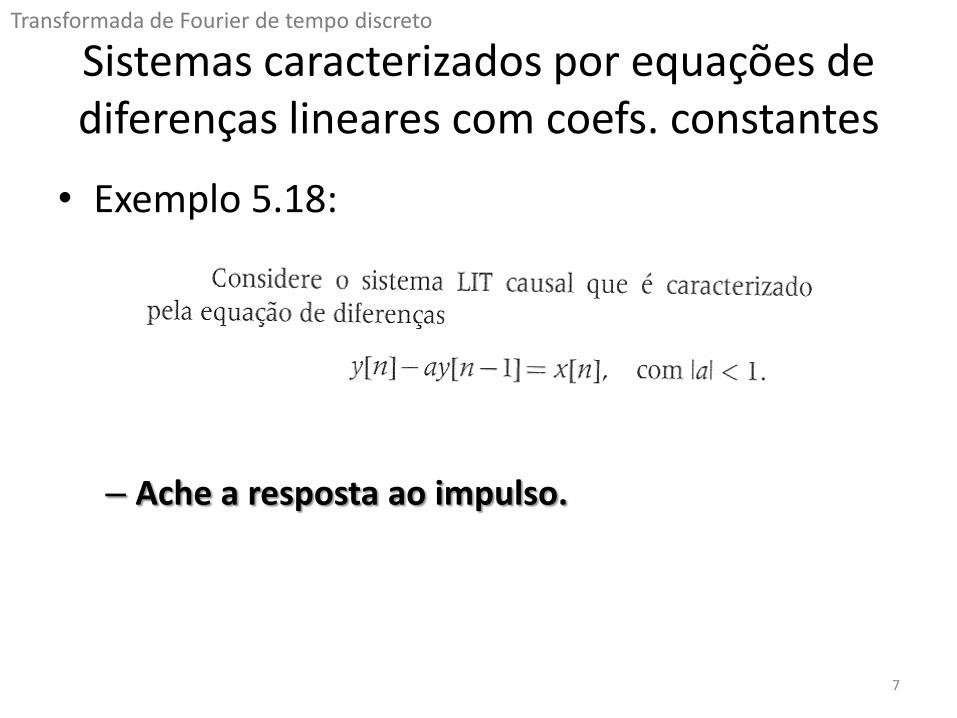
• Exemplo 5.18:
– Ache a resposta ao impulso.
7
Sistemas caracterizados por equações de diferenças lineares com coefs. constantes
Transformada de Fourier de tempo discreto
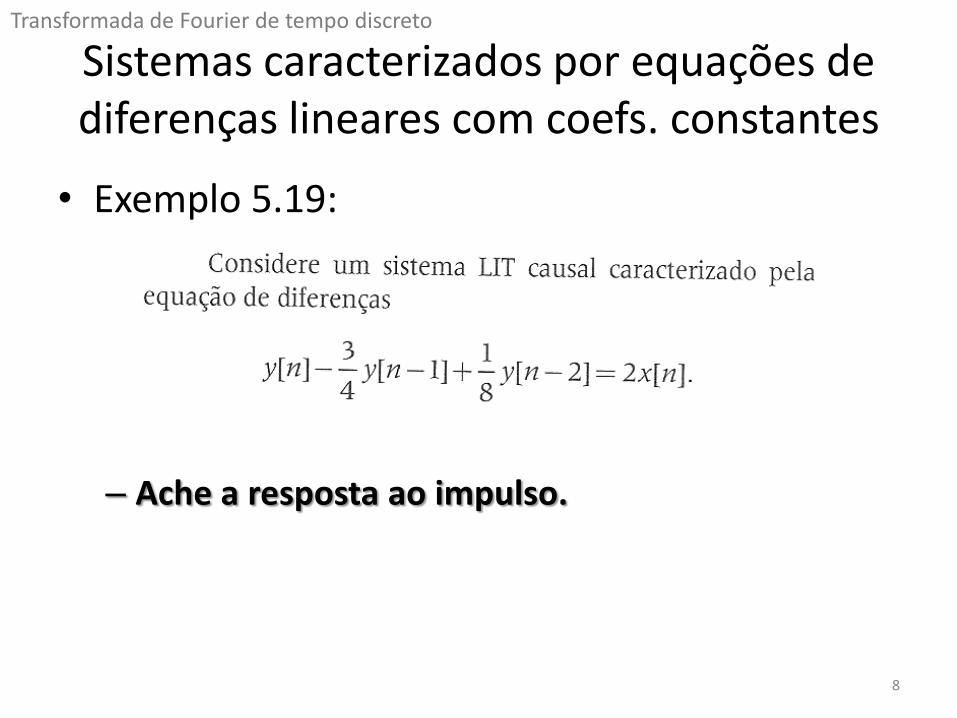
• Exemplo 5.19:
– Ache a resposta ao impulso.
8
Sistemas caracterizados por equações de diferenças lineares com coefs. constantes
Transformada de Fourier de tempo discreto
• Exemplo 5.20:
– Ache a saída y[n] do sistema.
9
Sistemas caracterizados por equações de diferenças lineares com coefs. constantes
Transformada de Fourier de tempo discreto

• Qualquer sistema com uma resposta em freq. que seja uma razão de polinômios em e-jw pode ser escrito como um produto ou soma de sistemas de 1ª e 2ª ordens.
• Vimos que para y[n] – ay[n-1] = x[n] com |a|<1 temos:
• e... h[n] = anu[n] (ver próximo slide análise em relação a a)
10
Sistemas caracterizados por equações de diferenças lineares com coefs. constantes
Transformada de Fourier de tempo discreto
jw
jw
aeeH
1
1
11

12
...e para a resposta ao degrau...
s[n] = h[n]*u[n]

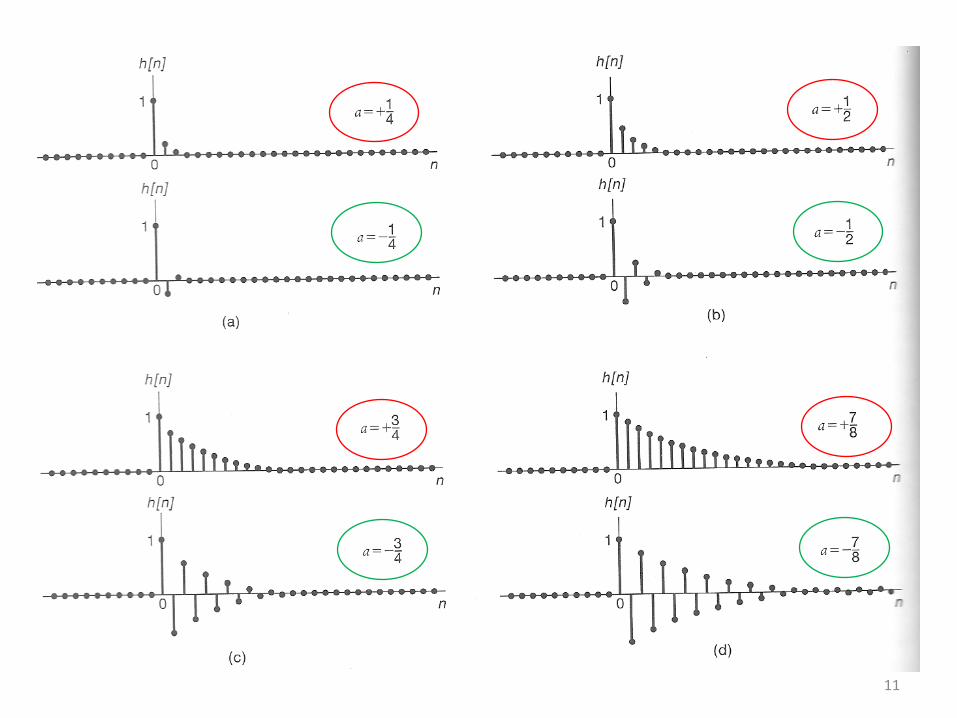
• a desempenha um papel análogo a τ no sistema de 1ª ordem contínuo.
– |a| determina a taxa com que o sistema de primeira ordem responde
• h[n] e s[n] convergem para o valor final na taxa em que |a|n converge para ZERO.
– h[n] cai bruscamente e s[n] acomoda-se rapidamente para |a| pequeno;
– Para |a| próximo de 1, essas respostas são mais lentas;
• Diferente do sistema contínuo, o sistema discreto de 1ª ordem pode apresentar comportamento oscilatório (a < 0);
13
Sistemas caracterizados por equações de diferenças lineares com coefs. constantes
Transformada de Fourier de tempo discreto

• A magnitude e fase da equação vista são dadas por:
14
Sistemas caracterizados por equações de diferenças lineares com coefs. constantes
Transformada de Fourier de tempo discreto
a>0 a<0
a perto de 1 = filtragem mais seletiva
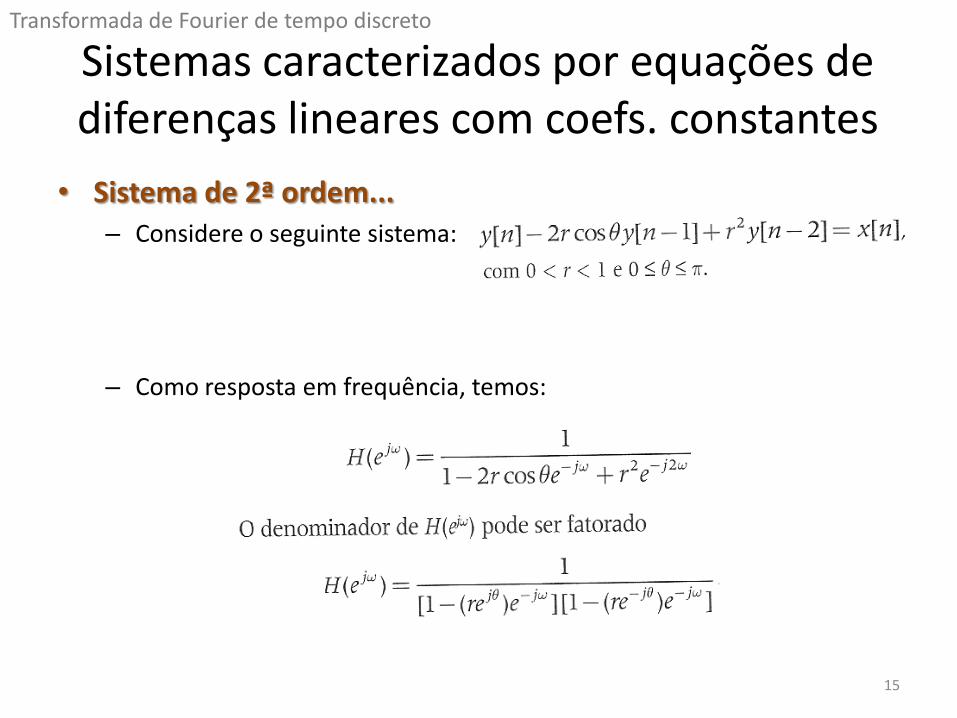
• Sistema de 2ª ordem...– Considere o seguinte sistema:
– Como resposta em frequência, temos:
15
Sistemas caracterizados por equações de diferenças lineares com coefs. constantes
Transformada de Fourier de tempo discreto

16
• Quanto mais próximo r é de 1, mais lento é o iidecaimento de h[n];• O valor de θ determina a freq. de oscilação.
• θ = 0, sem oscilação• θ = π, oscilação rápida

17
• Quanto mais próximo r é de 1, mais lento é o iidecaimento de h[n];• O valor de θ determina a freq. de oscilação.
• θ = 0, sem oscilação• θ = π, oscilação rápida
Oscilação freq = θ
sem oscilação
oscilação

18
h[n]

• A resposta em frequência desse sistema é:
19
Sistemas caracterizados por equações de diferenças lineares com coefs. constantes
Transformada de Fourier de tempo discreto

20
• A resposta em frequência desse sistema é:
Sistemas caracterizados por equações de diferenças lineares com coefs. constantes
Transformada de Fourier de tempo discreto
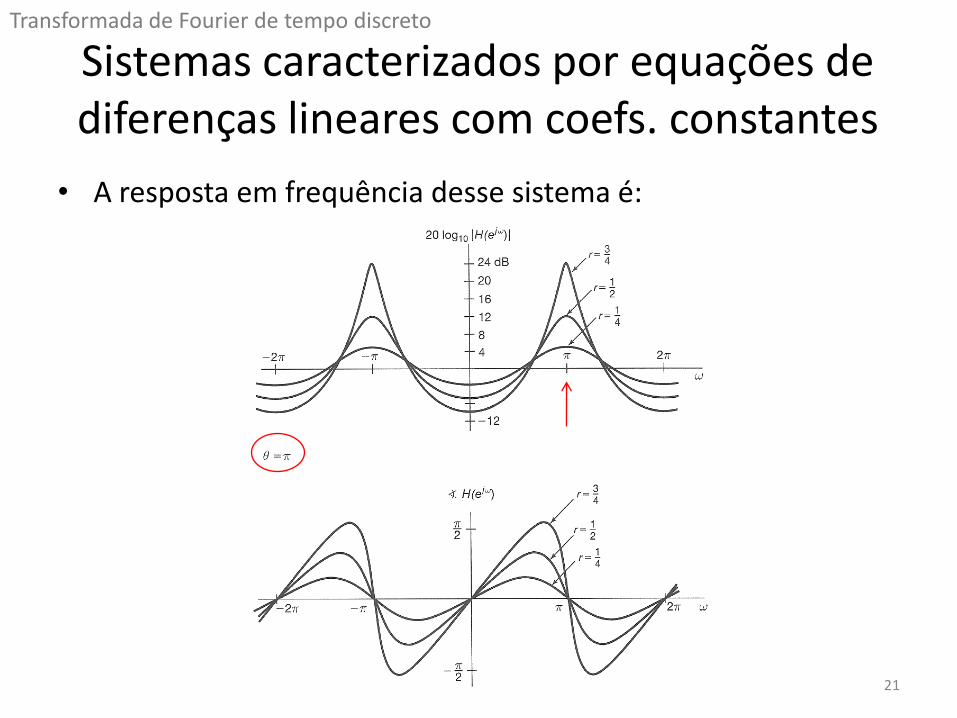
21
• A resposta em frequência desse sistema é:
Sistemas caracterizados por equações de diferenças lineares com coefs. constantes
Transformada de Fourier de tempo discreto
• Próxima aula....
22
A Transformada de Laplace
A Transformada de Laplace


















