UNIVERSIDADE FEDERAL DE ITAJUBÁ INSTITUTO DE …saturno.unifei.edu.br/bim/201800146.pdf · 3...
89
UNIVERSIDADE FEDERAL DE ITAJUBÁ INSTITUTO DE SISTEMAS ELÉTRICOS E ENERGIA Projeto de um Gerador Hidrocinético a Ímãs Permanentes Utilizando um Alternador Automotivo Hugo Souza Rios Sérgio Luiz Lisboa Itajubá, Julho de 2017
Transcript of UNIVERSIDADE FEDERAL DE ITAJUBÁ INSTITUTO DE …saturno.unifei.edu.br/bim/201800146.pdf · 3...

UNIVERSIDADE FEDERAL DE ITAJUBÁ
INSTITUTO DE SISTEMAS ELÉTRICOS E ENERGIA
Projeto de um Gerador Hidrocinético a Ímãs Permanentes Utilizando um
Alternador Automotivo
Hugo Souza Rios
Sérgio Luiz Lisboa
Itajubá, Julho de 2017

UNIFEI – ISEE Trabalho Final de Graduação
ii
UNIVERSIDADE FEDERAL DE ITAJUBÁ
INSTITUTO DE SISTEMAS ELÉTRICOS E ENERGIA
Hugo Souza Rios
Sérgio Luiz Lisboa
Projeto de um Gerador Hidrocinético a Ímãs Permanentes Utilizando um
Alternador Automotivo
Monografia apresentada ao Instituto de
Sistemas Elétricos e Energia, da
Universidade Federal de Itajubá, como
parte dos requisitos para obtenção do título
de Engenheiro Eletricista.
Orientador: Edson da Costa Bortoni
Itajubá, julho de 2017

UNIFEI – ISEE Trabalho Final de Graduação
iii

UNIFEI – ISEE Trabalho Final de Graduação
iv
Agradecimentos
Sérgio Luiz Lisboa agradece a:
Agradeço primeiramente a Deus, pois sem Ele não seríamos nada.
Agradeço aos meus pais (Pedro Massula Lisboa e Salete de Fátima Massulo Lisboa)
pelo amor, dedicação e apoio dado durante o projeto. A minha namorada Rafaela Rodrigues,
pela força e ajuda nos momentos difíceis e por todos amigos que acreditaram em mim.
Agradeço também ao meu amigo Hugo Rios pela companhia durante a confecção deste
trabalho.
Agradeço aos meus irmãos (Luiz Eduardo Lisboa e Brenda Helena Lisboa), por cada
momento de distração durante o tempo de apreensão.
Hugo Souza Rios agradece a:
Em primeiro lugar agradeço a Deus, o Rei dos reis, que, pela sua graça, me abençoou
até aqui.
Agradeço também aos meus pais (Aurelino Freitas Rios e Maria dos Reis de Souza
Rios) pelo amor, apoio e dedicação empregados a mim durante todos os dias da minha
existência.
Ao meu irmão, Emerson Rios, agradeço pela preocupação e cuidado ofertados a mim.
Ademais, agradeço ao Elídio Souza juntamente com sua família, ao Sérgio Lisboa,
coautor deste projeto, e a todos meus amigos que me apoiaram ou contribuíram de alguma
forma durante o desenvolvimento deste trabalho.

UNIFEI – ISEE Trabalho Final de Graduação
v
Resumo
O presente trabalho visa desenvolver um projeto de uma turbina hidrocinética de baixa
potência. A fim de baratear o custo do projeto, utilizou-se um alternador automotivo como
estrutura base para a construção do gerador. O gerador utilizado possui como característica a
ausência de escovas, brushless, e a presença de imãs permanentes para indução do fluxo de
excitação da máquina.
Palavras chave: turbina hidrocinética, imã permanente, alternador

UNIFEI – ISEE Trabalho Final de Graduação
vi
Abstract
The present work aims to develop a project of a hydrokinetic turbine of low power. In order to
cheapen the cost of the project, an automotive alternator was used as the base structure for the
construction of the generator. The generator used has the characteristic of the absence of
brushes, brushless, and the presence of permanent magnets to induce the excitation flow of
the machine.
Key words: hydrokinetic turbine, permanent magnet, alternator

UNIFEI – ISEE Trabalho Final de Graduação
vii
Lista de Figuras
Figura 1 - Rotor de um alternador .............................................................................................. 7
Figura 2 - Estator de um alternador ............................................................................................ 8
Figura 3 - Conjunto retificador de um alternador ....................................................................... 9
Figura 4 - Regulador de tensão de um Alternador.................................................................... 10
Figura 5 – Rolamentos de um alternador automotivo .............................................................. 11
Figura 6 - Tubina hidrocinética geração 1 ................................................................................ 14
Figura 7 - Turbina hidrocinética geração 2 .............................................................................. 15
Figura 8 - Turbina hidrocinética geração 3 .............................................................................. 16
Figura 9 - Turbina hidrocinética com difusor (configuração de fluxo) .................................... 18
Figura 10 - Modelo de Superfície de contorno tubular ............................................................ 19
Figura 11 - Disco atuador ......................................................................................................... 20
Figura 12 - Modelo de elementos de pá ................................................................................... 23
Figura 13 - Esforços hidrodinâmicos no elemento de pá ......................................................... 23
Figura 14 - Velocidade tangencial no rotor .............................................................................. 24
Figura 15 - Tipos de rotor ......................................................................................................... 26
Figura 16 - Gerador de imãs permanentes de fluxo radial com rotor interno. a) Vista
Compacta de um gerador, b) Vista Explodida de um gerador.................................................. 27
Figura 17 - Configuração de um rotor interno .......................................................................... 27
Figura 18 - Gerador de imãs permanentes de fluxo radial com rotor externo. a) Vista
Compacta, b) Vista Explodida .................................................................................................. 30
Figura 19 - Configuração de um rotor externo ......................................................................... 30
Figura 20 - Configuração de Máquina de Fluxo Axial. a) Rotor simples - estator simples b)
Rotor Simples - dois estatores c) Dois rotores - estator simples d) Estrutura multiestágio ..... 31

UNIFEI – ISEE Trabalho Final de Graduação
viii
Figura 21 - Configuração de um rotor axial ............................................................................. 32
Figura 22 - Determinação do PC através da curva de histerese ............................................... 40
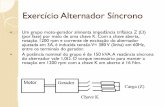
Figura 23 - Tipos de retificadores. a) Retificador monofásico de onda completa b) Retificador
trifásico em ponte ..................................................................................................................... 49
Figura 24 - Retificador trifásico não controlado meia ponte .................................................... 50
Figura 25 - Alternador automotivo com rotor interno base para o projeto............................... 52
Figura 26 - Projeto do gerador com os imãs já instados ........................................................... 55
Figura 27 - Cálculo da seção do fio através do software Drive Calculator .............................. 62
Figura 28 – Linhas de fluxo através das coroas do rotor e estator ........................................... 65
Figura 29 – Densidade de fluxo magnético através de rotor e estator ...................................... 66

UNIFEI – ISEE Trabalho Final de Graduação
ix
Lista de Tabelas
Tabela 1 - Tabela de combinações entre polos e ranhuras para máquinas trifásicas 34
Tabela 2 - Tabela de exemplos de passos polar 35
Tabela 3 – Comparação entre número de fases e características da maquina. 36
Tabela 4 - Número de polos e ranhuras do gerador 52
Tabela 5 - Dimensões das ranhuras do estator 62
Tabela 6 – Dados nominais do gerador 64
Tabela 7 - Propriedades Magnéticas de sinterizados de NdFeB 71

UNIFEI – ISEE Trabalho Final de Graduação
x
Lista de Abreviaturas e Siglas
CA Corrente Alternada
CC Corrente Contínua
CFD Computational Fluid Dynamic
DC Direct Current
MGOe Mega Gauss Oersteds
NdFeB Neodímio Ferro Boro
PC Coeficiente de permeância (sigla em inglês)
SmCo Samário Cobalto
THC Turbina Hidrocinética

UNIFEI – ISEE Trabalho Final de Graduação
xi
Lista de Símbolos
A ampères
Ad área do difusor
a fator de escoamento induzido
a’ fator de indução tangencial
B densidade de fluxo magnético
Br campo magnético residual
Byr valor de pico de indução na coroa do rotor
Bys valor de pico de indução na coroa do estator
Bδ valor de pico de indução no entreferro
bm ponto de operação
c comprimento do imã
cm centímetro
Cp coeficiente de potência
C’p coeficiente de potência real
D diâmetro
Ecc tensão na saída do retificador
El tensão de linha

UNIFEI – ISEE Trabalho Final de Graduação
xii
E∅ tensão de fase
f frequência
g comprimento do entreferro
H altura líquida de queda
Hz hertz
hyr altura da coroa do rotor
hys altura da coroa do estator
k kilo
kd fator de distribuição
ke fator de enrolamento
kp fator de passo
l comprimento ativo
li largura do imã
le comprimento axial equivalente
lm espessura do imã
M mega
m metro
mm milímetro
m/s metros por segundo
N número de espiras por fase

UNIFEI – ISEE Trabalho Final de Graduação
xiii
n velocidade de rotação
Nb número de espiras por bobina
NS rotação específica
P potência disponível
P0 potência cinética
Pef potência efetiva
p número de pólos
PC coeficiente de permeância
Q vazão
r raio do rotor
rpm rotações por minuto
T tesla
V velocidade no disco
V0 velocidade de corrente
Vr velocidade relativa
Vt velocidade tangencial
W watt
Wb weber
ρ massa específica da água
λ razão de velocidade periférica de rotação do rotor

UNIFEI – ISEE Trabalho Final de Graduação
xiv
ω velocidade angular de rotação (rad/s)
λ’ nova razão de velocidade periférica de rotação do rotor
coeficiente de vazão
Ψ coeficiente de pressão
β ângulo de entrada do fluido na pá
III inteiro imediatamente inferior
constante matemática com valor aproximado de 3,1415
φ fluxo magnético (Wb)
θe ângulo elétrico em graus
θm ângulo mecânico em graus

UNIFEI – ISEE Trabalho Final de Graduação
xv
Sumário
1 INTRODUÇÃO ................................................................................................................ 1
2 REVISÃO DA LITERATURA ....................................................................................... 4
3 ALTERNADOR AUTOMOTIVO .................................................................................. 6
3.1 Partes construtivas do alternador automotivo ....................................................... 6
3.1.1 Rotor ........................................................................................................................... 7
3.1.2 Estator ......................................................................................................................... 8
3.1.3 Conjunto retificador .................................................................................................... 9
3.1.4 Regulador de Tensão ................................................................................................ 10
3.1.5 Rolamentos ............................................................................................................... 11
3.2 Princípio de funcionamento ................................................................................... 11
3.3 Alternador escolhido .............................................................................................. 12
4 MODELAGEM TEÓRICA ........................................................................................... 13
4.1 Turbinas Hidrocinéticas ........................................................................................ 13
4.1.1 Componentes da turbina hidrocinética ..................................................................... 17
4.1.2 Parâmetros matemáticos gerais do funcionamento .................................................. 17
4.1.3 Modelagem do escoamento no rotor ........................................................................ 22
4.2 Tipos de rotor .......................................................................................................... 25
4.2.1 Rotor Interno ............................................................................................................ 26
4.2.2 Rotor Externo ........................................................................................................... 29
4.2.3 Rotor Axial ............................................................................................................... 31
4.3 Polos do gerador ..................................................................................................... 32
4.4 Ranhuras ................................................................................................................. 33
4.5 Passo polar .............................................................................................................. 34
4.6 Número de fases ...................................................................................................... 35
4.7 Entreferro ................................................................................................................ 36
4.8 Imãs permanentes ................................................................................................... 36
4.8.1 Terras-raras ............................................................................................................... 37
4.8.2 Grade Magnética....................................................................................................... 38
4.8.3 Coeficiente de Permeância ....................................................................................... 39

UNIFEI – ISEE Trabalho Final de Graduação
xvi
4.9 Laminação e projeto da pilha do estator .............................................................. 41
4.9.1 Cortar as lâminas ...................................................................................................... 41
4.9.2 Empilhamento ........................................................................................................... 41
4.9.3 Isolamento dos slots ................................................................................................. 43
4.9.4 Enrolamento e inserção das bobinas de fase ............................................................ 43
4.9.5 Envernizamento ........................................................................................................ 44
4.9.6 Enrolamento com condutores de fios múltiplos ....................................................... 44
4.9.7 Minimização de perdas ............................................................................................. 45
4.9.8 Número de dentes do estator e dimensões do núcleo ............................................... 46
4.9.9 Pontas dos dentes do estator ..................................................................................... 46
4.9.10 Cogging skew ................................................................................................... 46
4.9.11 Gerenciamento de voltas de extremidade ......................................................... 47
4.10 Coroa do rotor ........................................................................................................ 47
4.11 Retificadores............................................................................................................ 48
5 RESULTADO E DISCUSSÃO ...................................................................................... 51
5.1 Velocidade de rotação e escoamento ..................................................................... 51
5.2 Especificação do rotor ............................................................................................ 51
5.3 Especificação do número de polos, número de ranhuras e do passo polar ....... 52
5.4 Escolha do número de fases ................................................................................... 53
5.5 Escolha do entreferro ............................................................................................. 53
5.6 Escolha dos imãs ..................................................................................................... 53
5.6.1 Cálculo da espessura do imã ..................................................................................... 54
5.6.2 Dimensões do Imã .................................................................................................... 54
5.7 Cálculo da coroa do rotor ...................................................................................... 55
5.8 Cálculo do fluxo ...................................................................................................... 56
5.9 Cálculo do número de espiras por fase ................................................................. 57
5.9.1 Fator de enrolamento ................................................................................................ 57
5.9.2 Cálculo da frequência ............................................................................................... 59
5.9.3 Tensão desejada por fase .......................................................................................... 60
5.9.4 Número de espiras por fase ...................................................................................... 60
5.10 Cálculo da seção do fio ........................................................................................... 61
5.11 Especificação da potência do gerador ................................................................... 63
5.12 Simulação ................................................................................................................ 64
6 CONCLUSÃO ................................................................................................................. 67

UNIFEI – ISEE Trabalho Final de Graduação
xvii
REFERÊNCIAS ..................................................................................................................... 68
ANEXO A ................................................................................................................................ 71

UNIFEI – ISEE Trabalho Final de Graduação
1
1 Introdução
Uma das primeiras formas utilizadas pelo homem para a conversão de energia de
correntes em potência mecânica realizou-se através do uso de rodas d’água de madeira. Rodas
d’água de vários tipos foram utilizadas em algumas partes da Europa e Ásia durante vários
anos, principalmente para moer grãos (Paish, 2002).
Vitruvio, um século antes de Cristo, projetou e instalou várias rodas d’água simples e
fáceis de construir. Estas máquinas trabalhavam à baixa rotação sendo usadas em pequenas
quedas e gerando pequenas potências. Devido a este fato e com o progresso da Era Industrial
estas foram reduzindo sua aplicação (Macintyre, 1983).
Leonard Euler (1707-1783), que inventara uma roda de reação com distribuidor fixo,
verdadeira percussora da turbina, publicou em 1751 seus primeiros trabalhos sobre turbo-
máquinas. Os estudos de Euler encontraram aplicações decisivas no século XIX com as rodas
Poncelet e cm as turbinas propriamente ditas. Pode-se, em resumo, dizer que a concepção da
turbina se deve a Euler e que a primeira turbina industrial foi obra de Fourneyron (Macintyre,
1983).
Essa evolução histórica das turbinas hidráulicas permitiu o desenvolvimento de
sistemas hidroelétricos de grande e médio porte, com alta eficiência de conversão. Porém,
consideráveis impactos ambientais acompanharam esta evolução.
Como uma alternativa sustentável para a geração de energia elétrica aparece a turbina
hidrocinética, ou hidroturbina de águas correntes, a qual é capaz de converter a energia
cinética dos rios, correntes marinhas, ou até mesmo de maré, em energia elétrica.
Ao contrário das turbinas hidráulicas de grande porte, as quais necessitam de represas,
lagos artificiais e outras infraestruturas associadas ao armazenamento e controle do potencial
hídrico, estes sistemas hidrocinéticos de pequeno porte são capazes de converter a energia
cinética das águas em movimento diretamente, sem interromper seu curso natural.
A exploração de pequenas máquinas hidrocinéticas não é definitivamente um novo
conceito, foi investigado pela universidade do Reino Unido em 1979, no Canadá e por
estudantes na Austrália no mesmo tempo, sendo utilizadas na África em pequenas escalas nos
anos 80. Porém, uma revisitação desta tecnologia no momento atual, pode significar uma
excelente alternativa para a geração de eletricidade de forma sustentável (Paish, 2002).
Esta tecnologia, no entanto, possui a necessidade de ser robusta e satisfatória para
condições extremamente severas, como as encontradas em comunidades remotas,

UNIFEI – ISEE Trabalho Final de Graduação
2
considerando um funcionamento sem interrupção de vários anos e com uma manutenção
mínima, sendo capaz de promover uma potência elétrica da ordem de 2 kW (Tiago-Filho,
2003).
Comparando-se os sistemas que utilizam a energia da correnteza dos rios a sistemas
com represamento, verifica-se que os primeiros possuem uma eficiência menor, uma vez que,
estão sujeitos ao chamado limite de Betz (Betz, 1926), que define como 59,3% o limite
máximo da energia cinética incidente que pode ser convertida em potência elétrica. No
entanto, esta limitação não os desqualifica como uma alternativa para geração de pequenos
blocos de energia (Nascimento et al., 1997), já que este possui como principais vantagens:
Barateamento dos custos relativos aos trabalhos civis de construção;
Eliminação de distúrbios no ecossistema;
Exploração de uma gama maior de lugares, necessitando apenas de um fluxo de água
frequente e constante.
Alguns problemas potenciais, no entanto, não podem ser desconsiderados, como:
Necessidade de uma boa ancoragem, devido às forças de arrasto do conjunto da
turbina;
Crescimento de algas nas pás, reduzindo sua eficiência;
Corrosão da máquina;
Danos por tempestade;
Possível perigo oferecido a embarcações e banhistas em certas áreas.
O sistema de potência hidrocinética, com baixos impactos ambientais, representa uma
ótima fonte de geração de energia para pequenas comunidades isoladas que se localizam as
margens de rios, principalmente em países em desenvolvimento (Brasil et al., 2006), devido à
existência de vastas distâncias entre as comunidades, e também o fato destas regiões seres
inóspitas, como por exemplo, as que se localizam na Floresta Amazônica.
O objetivo deste trabalho é projetar um gerador hidrocinético que atenda dois
requisitos básicos, possua baixos impactos ambientais e que seja viável, ou seja, de forma que
o fator econômico seja atendido. A fim de se obter um projeto de gerador hidrocinético com
um custo relativamente baixo e que possa atender cargas pontuais de baixa potência, este

UNIFEI – ISEE Trabalho Final de Graduação
3
estudo se concentrará na transformação de um alternador de carro em um gerador
hidrocinético. Sabe-se ainda que a configuração dos alternadores veiculares seguem o mesmo
padrão, o que facilita a implementação do projeto aqui apresentado para diversas marcas de
alternadores.
Este trabalho está dividido em seis capítulos. No primeiro capítulo, um breve histórico
sobre a geração de energia elétrica através da conversão da energia cinética dos rios, o
objetivo do trabalho e uma breve descrição da metodologia e dos capítulos são apresentados.
O segundo capítulo apresenta uma revisão das obras que embasam este trabalho, assim
como outros trabalhos já realizados sobre o mesmo assunto.
No terceiro capítulo é apresentado o alternado automotivo, foco deste trabalho, uma
vez que a partir dele será desenvolvido o gerador em questão, mostrando seus aspectos
construtivos, seu princípio de funcionamento e o tipo de alternador escolhido como base.
No quarto capítulo é mostrado todo embasamento teórico necessário para
entendimento do trabalho bem como os cálculos e a metodologia utilizada para o projeto em
questão.
O quinto capítulo mostra o conceito adquirido no quarto capítulo sendo aplicado de
fato ao projeto. Portando, encontram-se nesse capítulo os resultados obtidos neste trabalho.
Por fim, no sexto capítulo é apresentada a conclusão, que é uma resposta para a
problemática do tema proposto na introdução, com base nos resultados que os autores
avaliaran e interpretaram.

UNIFEI – ISEE Trabalho Final de Graduação
4
2 Revisão da Literatura
O projeto aqui desenvolvido tem como referências algumas obras, sendo elas livros
textos, artigos, teses e estudos. A literatura técnica sobre a concepção, projeto e uso de
turbinas hidrocinéticas não é muito vasta. Apenas poucos artigos são apresentados e em geral,
muitos destes disponibilizados em anais de conferências ou veículos específicos.
Os livros textos, principalmente, deram base teórica sobre a questão do projeto da
máquina e a maioria das formulações que torna possível o dimensionamento deste gerador.
Uma revisão sobre turbinas hidrocinéticas pode ser encontrada em (Tiago-Filho,
2003), descrevendo aspectos gerais e o potencial de uso desta tecnologia no Brasil. Este
trabalho aborda o potencial desta tecnologia para o uso em comunidades isoladas. Esta mesma
abordagem é encontrada em (Els et al., 2003), onde uma visão geral de uma THC instalada
em uma comunidade rural (Município de Correntina na Bahia) é apresentada.
Uma importante referência sobre o tema é apresentada por Gorban et al., (2001), onde
são explorados os limites de eficiência de máquinas em fluxo livre. Este artigo apresenta uma
dedução analítica importante baseada na resistência hidrodinâmica de blocagens do
escoamento por rotores de THC (Turbina Hidrocinética). Os resultados obtidos estabelecem
limites de eficiência mais restritivos do que os limites clássicos propostos por Betz, (Betz,
1926). Finalmente este trabalho explora um novo conceito de turbina chamado de turbina de
Gorlov (Gorlov, 1995), contornando esta limitação teórica. A importância deste resultado
consiste no fato do aumento da eficiência de máquinas hidrocinéticas só tornar-se possível
através do uso de mecanismos hidrodinâmicos de compensação da resistência hidráulica da
máquina, seja pelo uso de difusores, seja pela inovação do desenho geométrico não
convencional de pás.
Os artigos de (Mesquita et al., 1999) e (Mesquita et al., 2000) apresentam uma
metodologia de projeto e análise hidrodinâmica baseada no equacionamento matemático do
equilíbrio de esforços hidrodinâmicos nas pás. Este trabalho representa um excelente ponto de
partida para o desenvolvimento de projetos de THC’s, uma vez que, proporciona uma
formulação rápida e eficaz para o dimensionamento hidrodinâmico de rotores.
Em (Miller e Hendershot JR, 1994) é feito todo um estudo de projeto e
dimensionamento de máquinas síncronas de ímã permanente no rotor, do tipo brushless DC.
Os autores destacam vários aspectos que devem ser observados no dimensionamento de cada
componente da máquina, desde a espessura do ímã, espessura do dente, comprimento do

UNIFEI – ISEE Trabalho Final de Graduação
5
entreferro, até a forma de distribuição das bobinas na máquina. Contém análise do
comportamento da constante de velocidade que influencia no desempenho e acionamento do
motor. Levantam diretrizes para a construção de motores e enredam uma série de formulações
que dão uma primeira estimativa para o dimensionamento do projeto.
Assim como (Miller e Hendershot JR, 1994), em (Hanselman, 1994) são abordados,
também, aspectos dimensionais dos motores brushless DC. Porém neste último, o estudo é
iniciado e encaminhado de forma mais superficial. Em um aspecto ou outro, o autor entra em
mais detalhes, mas mantém a abordagem genérica a fim de dar uma visão geral sobre os
aspectos construtivos de tais máquinas.
No que diz respeito aos estudos sobre ímãs permanentes, sua evolução e seu uso em
motores, (NASAR e BOLDEA, 1993) fazem um estudo detalhado e traz algoritmos de
simulação para circuitos magnéticos e elementos finitos. Abordam também, motores de
relutância chaveada e motores auto síncronos.
A equipe japonesa do professor Karemoto (Inagaki et al., 2004), (Kanemoto et al.,
2002) apresenta uma concepção simples e eficiente de turbina tipo hélice de eixo inclinado,
apresentando bons resultados, em particular para rios de pouca profundidade. A simplicidade
do projeto, que envolve eixo de rotores inclinados é uma alternativa que proporciona um
baixo custo final da máquina.
Uma linha de desenvolvimento atual explorada por vários grupos de pesquisa
internacionais baseia-se no desenvolvimento de máquinas para correntezas de maré (Bahaj &
Meyers, 2003). Embora aspectos de desenvolvimento hidrodinâmico possam ser
compartilhados de máquinas de correntes de rio, muitas especificações operacionais são muito
específicas de correntes marinhas. Em geral tais máquinas são concebidas com grandes
dimensões, o que foge um pouco do propósito de aplicação desejada por este trabalho.
Do lado de fabricantes de pequenas máquinas, poucas informações técnicas são
disponibilizadas sobre THC´s (UEK, 2005), por exemplo. Poucas empresas disponibilizam
produtos acabados na Internet, o que torna o desafio do desenvolvimento tecnológico ainda
mais justificável.

UNIFEI – ISEE Trabalho Final de Graduação
6
3 Alternador automotivo
Alternadores são máquinas que convertem a energia mecânica em energia elétrica
tendo as mais variadas aplicações nos dias atuais, sendo as mais usuais em automóveis e
geradores portáteis de energia elétrica, muito comum em grandes estabelecimentos
comerciais, para evitar que uma possível queda de energia se prolongue por muito tempo. O
alternador automotivo é um componente elétrico que tem como principal função alimentar
todos os componentes eletrônicos do veículo e, principalmente, a bateria.
A fim de suprir todos esses componentes, o alternador deve possuir em sua saída uma
tensão acima da tensão da bateria, geralmente 12 Volts. A maioria dos veículos está equipada
com alternadores de 14 Volts, com o intuito de, mesmo alimentando o sistema elétrico
interno, carregar a bateria.
Nos dias atuais, está se tornando um problema os veículos possuírem bateria de 12
Volts e alternadores de 14 Volts, pois a gama de itens opcionais relacionados ao conforto dos
passageiros vem crescendo, aumentando a demanda do sistema elétrico do veículo.
O projeto do gerador hidrocinético em questão terá como premissa a utilização de um
alternador automotivo modificado, ou seja, com as mudanças necessárias para que este se
torne um gerador a imãs permanentes.
3.1 Partes construtivas do alternador automotivo
Os principais componentes do alternador são:

UNIFEI – ISEE Trabalho Final de Graduação
7
3.1.1 Rotor
O rotor é responsável pela formação do campo magnético. É construído em aço e
possui em seu interior uma bobina de cobre enrolada ao redor de um eixo, conforme figura 1.
A quantidade de voltas de fio (espiras) somada ao diâmetro do fio varia de acordo
com a capacidade de cada alternador.
O principal defeito no rotor é o curto-circuito entre os fios da bobina, o que provoca a
diminuição ou até mesmo a ausência total da capacidade de gerar corrente elétrica. Neste caso
deve-se fazer a substituição da peça defeituosa.
Figura 1 - Rotor de um alternador
Fonte: Site tunados.net (2017)

UNIFEI – ISEE Trabalho Final de Graduação
8
3.1.2 Estator
A função do estator é produzir a corrente elétrica. É constituído por um conjunto de
bobinas isoladas entre si e fixados em um conjunto de laminas de aço, conforme a figura 2.
A corrente gerada é função do campo magnético gerado pela bobina do rotor e da
rotação.
O defeito mais comum que ocorre no estator é o curto circuito entre as bobinas e as
laminas de aço, o que impede o mesmo de gerar energia.
Figura 2 - Estator de um alternador
Fonte: Site tunados.net (2017)

UNIFEI – ISEE Trabalho Final de Graduação
9
3.1.3 Conjunto retificador
Conhecido como placa de diodos, esse componente tem a função de transformar a
corrente alternada produzida pelo alternador automotivo em corrente contínua, necessária para
carregar a bateria, figura 3.
O defeito mais comum é a presença de diodos queimados, o que atrapalha o
funcionamento do conjunto.
Figura 3 - Conjunto retificador de um alternador
Fonte: Site tunados.net (2017)

UNIFEI – ISEE Trabalho Final de Graduação
10
3.1.4 Regulador de Tensão
É o componente responsável em controlar a energia produzida pelo alternador
automotivo, limitando esta tensão para que não haja picos de corrente elétrica, o que pode
causar danos nos consumidores elétricos. A figura 4 mostra alguns reguladores de tensão.
Ele também impede que a bateria automotiva sofra sobrecarga. Existem reguladores
mecânico, eletrônico, híbrido ou multifunção (inteligente), em função da evolução dos
diferentes tipos de alternadores existentes.
Os problemas mais comuns são: desgastes de escovas o que prejudica o
funcionamento correto do alternador, e reguladores de tensão que não conseguem mais fazer o
controle da tensão gerada, deixando que a bateria e os outros consumidores recebam um
excesso de carga ou que recebam pouca energia. A maior parte destes problemas é causada
por desgastes do próprio componente.
Figura 4 - Regulador de tensão de um Alternador
Fonte: Site tunados.net (2017)

UNIFEI – ISEE Trabalho Final de Graduação
11
3.1.5 Rolamentos
Os rolamentos estão localizados nas extremidades do rotor e tem a função de permitir
que o rotor gire de forma livre dentro da carcaça do alternador automotivo. A figura 5 mostra
dois enrolamentos utilizados em alternadores.
Os principais defeitos nos rolamentos do alternador são ruídos e travamentos, defeitos
que na maioria das vezes são provocados por desgastes da própria peça, mas em alguns casos
podem ocorrer problemas na montagem dos mesmos.
Figura 5 – Rolamentos de um alternador automotivo
Fonte: Site tunados.net (2017)
3.2 Princípio de funcionamento
O funcionamento de um alternador está intimamente relacionado com o princípio de
indução eletromagnética. A descoberta dos princípios que levaram ao desenvolvimento do
alternador ocorreu na metade do século XIX. Entre os experimentos cruciais para se atingir a
tecnologia do gerador é indispensável citar o gerador de Van de Graaff e o disco de Faraday.
No alternador automotivo, quando a chave de ignição é ligada, o rotor do alternador
recebe corrente elétrica da bateria (neste caso corrente de pré-excitação).
Essa corrente circula pela bobina existente no rotor e produz um campo magnético.
Quando o motor está em movimento, o alternador automotivo começa a girar acionado por
uma correia.

UNIFEI – ISEE Trabalho Final de Graduação
12
Durante o movimento de rotação, as linhas magnéticas atravessam as bobinas de fios
de cobre existentes no estator. Neste momento o estator começa a gerar corrente alternada na
qual será transformada através do conjunto retificador em corrente contínua para poder
carregar a bateria a ser utilizada pelos consumidores do sistema.
3.3 Alternador escolhido
O alternador escolhido é um alternador da marca ARNO utilizado em um carro
modelo Monza, da Chevrolet. Possui potência de 700 Watts aproximadamente, tendo 14 polos
e 42 ranhuras, possuindo 4 espiras por fase por ranhura, sendo cada espira constituída de fios
AWG15 que tem diâmetro de 1,45 milímetros. O alternador possui uma ponte retificadora
trifásica de um caminho em sua saída e duas escovas.
O alternador possui em sua carcaça dois enrolamentos, o rotor é constituído em forma
de dentes possuindo um enrolamento de fios finos em seu centro, responsáveis por gerar o
fluxo magnético e magnetizar os “dentes” do rotor.
Tal componente é responsável por gerar uma tensão de 14 Volts e 10 Amperes quando
submetido às baixas velocidades do motor, em torno de 600 rpm.

UNIFEI – ISEE Trabalho Final de Graduação
13
4 Modelagem Teórica
Nesta etapa do trabalho, abordar-se-ão os parâmetros teóricos que servirão de base
para o projeto de um gerador hidrocinético a imãs permanentes utilizando um alternador
automotivo. Uma lista com diversos passos a serem seguidos para o projeto de uma máquina
Brushless DC é encontrada em Miller e Hendershot JR, 1994. No entanto, devido às
peculiaridades do projeto, ou seja, ser um gerador hidrocinético aproveitando o design de um
alternador automotivo, esta lista não será seguida, criando-se assim uma nova lista de passos
mais coerente para o desenvolvimento do projeto.
4.1 Turbinas Hidrocinéticas
No Brasil a experiência de maior sucesso na geração de energia elétrica utilizando
turbinas hidrocinéticas é associada ao Departamento de Engenharia Mecânica da
Universidade de Brasília-UnB, com um grupo de estudo e desenvolvimento de turbinas axiais
(Els et al., 2003).
A primeira máquina desenvolvida por este grupo de pesquisas, chamada Geração 1, foi
instalada em Julho de 1995 em Correntina-BA, com uma capacidade de geração de 1,5 kW de
potência elétrica (Oliveira & Souza, 2006). Este projeto apresenta algumas inovações como
uma grade na entrada da turbina e um estator de forma a direcionar o fluxo de água,
melhorando o ângulo de ataque nas pás do rotor. Além de um tubo de sucção na parte saída e
cones no centro da turbina para minimizar a geração de turbulência das correntes de água e
melhorar o desenho hidrodinâmico. Das instalações existentes, os melhores resultados para
esta turbina foram obtidos com uma velocidade de escoamento de 2 m/s e seis pás, oitenta
centímetros de diâmetro (Tiago-Filho, 2003).

UNIFEI – ISEE Trabalho Final de Graduação
14
Figura 6 - Tubina hidrocinética geração 1
Fonte: Blog Energia Hidrocinética (2017)
Com a instalação de um difusor cônico usando o mesmo conceito de turbinas eólicas
com difusor, surgiu a turbina hidrocinética Geração 2, Figura 7, instalada também em
Correntina-BA em Agosto de 2005 e em Maracá - AP em Outubro de 2006. O uso do difusor
gera uma desaceleração do escoamento na saída da turbina criando uma região de baixa
pressão neste ponto, aumentando a velocidade do escoamento na entrada desta e
consequentemente, o coeficiente de potência da máquina. Esta melhora de desempenho foi
efetivamente observada em testes realizados, porém, um aumento das dimensões devido ao
uso do difusor, torna esta máquina inadequada para uso em certos rios com baixa
profundidade. Esta última limitação foi parcialmente equacionada pela concepção de um
difusor assimétrico, abrindo para as laterais (Oliveira & Souza, 2006).

UNIFEI – ISEE Trabalho Final de Graduação
15
Figura 7 - Turbina hidrocinética geração 2
Fonte: Monografia da Ludmila Evangelista dos Santos (2016)
Com a evolução do projeto e a busca por uma máquina mais compacta e portátil foi
concebida a turbina hidrocinética Geração 3, Figura 8. A superfície interna da carcaça
perfilada, agindo como um difusor, reduzindo a pressão na saída e a integração do gerador ao
núcleo, formando um conjunto com o rotor, formam importantes incrementos nesta nova
geração (Oliveira & Souza, 2006).

UNIFEI – ISEE Trabalho Final de Graduação
16
Figura 8 - Turbina hidrocinética geração 3
Fonte: Monografia da Ludmila Evangelista dos Santos (2016)
A geometria proposta para a turbina hidrocinética visa à obtenção de uma máquina
axial com um desempenho hidráulico o mais próximo possível de uma turbina axial
convencional, uma vez que para uma máquina axial convencional pode-se alcançar uma
eficiência próxima a 90%. No entanto, como se trata de uma máquina de fluxo livre, a energia
máxima que pode ser convertida da energia cinética na área do rotor de projeção é 59.3% (Cp
max = 0.59), como definido pelo limite de Betz. Esta menor eficiência é proveniente da
redução da velocidade do fluxo na entrada da turbina (Lula et al., 2006).
O uso de um difusor partido faz com que o escoamento externo da turbina passe pelo
vão entre a carcaça e o difusor, levando a um controle da camada limite na superfície interna
deste difusor. Devido a este controle é possível utilizar um difusor mais curto, de um ângulo
de abertura maior que 8°, um resultado muito mais econômico do que os difusores longos
usados nas gerações anteriores (Oliveira & Souza, 2006). Esta nova concepção foi projetada
em cooperação com a Ecole Nationale d’Arts e Metiers (ENSAN) de Paris, França.
Simulações numéricas e experimentais foram realizadas nesta turbina. Lula et al.
(2006), apresentaram um estudo experimental em escala reduzida 1:10 através de um túnel de
vento conseguindo resultados satisfatórios em sua potência de saída. Brasil et al. (2006), com
simulações numéricas através de técnicas CFD (Computational Fluid Dynamic) obtiveram
uma potência de 1.5 kW para rios com velocidade de 2 m/s.

UNIFEI – ISEE Trabalho Final de Graduação
17
4.1.1 Componentes da turbina hidrocinética
A turbina hidrocinética é composta basicamente pelo gerador, rotor com as hélices e
pela transmissão mecânica.
O gerador elétrico é o componente do protótipo responsável pela conversão da energia
que vem da transmissão mecânica em energia elétrica. Uma atenção especial deve ser dada a
este componente, porque sua forma de operação e eficiência afeta substancialmente a geração
energética da turbina. Para se ter uma ideia, para um mesmo rotor e dois geradores diferentes
pode haver maior ou menor eficiência no sistema. Por exemplo, o uso de um gerador elétrico
assíncrono para sistemas com altas variações de velocidade é menos eficiente do que um
gerador síncrono de ímã permanente, que é apropriado a baixas rotações e altos torques, além
de serem mais adequados a grandes variações de velocidade, como ocorrem em turbinas de
pequeno porte. Desta forma, tais conhecimentos são relevantes, pois a decisão sobre o tipo de
gerador elétrico a ser utilizado afeta diretamente o bom dimensionamento do sistema.
O rotor é o componente do sistema responsável por captar a energia cinética do
escoamento e transformá-la em energia mecânica de rotação. É o componente mais
característico de um sistema hidrocinético. Por este motivo, a configuração do rotor influencia
diretamente no rendimento global do sistema.
Transmissão mecânica é o subsistema necessário para o acoplamento entre o eixo do
rotor com o eixo do gerador. A sua eficiência também é importante porque afeta
consideravelmente o rendimento geral do protótipo. Para melhorar o rendimento da
transmissão devem ser observados parâmetros e conceitos sobre o assunto. A relação de
transmissão, que é dada pela razão entre o diâmetro da polia movida pela polia motora, é um
dos parâmetros que devem ser bem calculados, pois influencia bastante a geração do sistema.
4.1.2 Parâmetros matemáticos gerais do funcionamento
Seja uma turbina axial, Figura 9, instalada em um fluido em movimento com uma
velocidade de corrente V0, a potência cinética P0 disponível que cruza uma área transversal ao
flux 𝐴 = 𝜋𝑟2, é dada por:
𝑃0 =1
2𝜌𝐴𝑉0
3 (1)

UNIFEI – ISEE Trabalho Final de Graduação
18
Onde ρ denota a massa específica e r o raio do rotor.
Figura 9 - Turbina hidrocinética com difusor (configuração de fluxo)
Fonte: Dissertação da Anna P. S. P. Rodigues (2007)
No entanto, essa energia não é totalmente convertida pela turbina. Devido a este fato
introduz-se o conceito de coeficiente de potência, o qual caracteriza o nível de rendimento de
uma turbina.
O estudo de turbinas hidrocinéticas possui uma forte associação com a parametrização
utilizada em máquinas eólicas. Assim, considerando que a THC produz uma potência efetiva
de Pef, é possível definir o coeficiente de potência, Cp, da mesma como:
𝐶𝑝 = 𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑑𝑖𝑠𝑝𝑜𝑛í𝑣𝑒𝑙 𝑛𝑜 𝑒𝑖𝑥𝑜
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑑𝑖𝑠𝑝𝑜𝑛í𝑣𝑒𝑙 𝑛𝑜 𝑓𝑙𝑢𝑖𝑑𝑜
𝐶𝑝 = 𝑃𝑒𝑓
𝑃0=
𝑃𝑒𝑓
12 𝜌𝐴𝑉0
3 (2)
Esse Cp geralmente é expresso como uma dependência funcional da razão de
velocidade periférica de rotação do rotor (λ), definida como:

UNIFEI – ISEE Trabalho Final de Graduação
19
𝜆 =𝜔𝑟
𝑉0 (3)
Nota-se que ω e r representam respectivamente a velocidade angular de rotação (rad/s)
e o raio externo do rotor (m).
O escoamento de água em torno e no interior de uma turbina hidrocinética livre é
caracterizado por uma redução de sua velocidade na face de entrada do rotor. Isto se dá como
consequência da resistência hidrodinâmica da máquina, que bloqueia o escoamento como um
volume semipermeável. Parte do fluido então contorna a turbina e parte flui em seu interior
proporcionando a conversão de energia hidráulica em mecânica.
Supondo que a massa do fluido permaneça separada da que não atravessa a turbina e
que, portanto não sofre a redução de velocidade, pode-se desenhar uma superfície de contorno
entre a massa afetada e a não afetada pela turbina. Essa superfície pode ser estendida à jusante
e a montante do disco da turbina formando um tubo de corrente com seção circular, Figura 10.
Como o fluido não atravessa essa superfície de contorno, a vazão mássica é a mesma ao longo
de qualquer seção do tubo (Burton et al., 2001).
Sendo o fluido incompressível, uma expansão da seção logo após o disco do rotor
deverá ocorrer, acomodando a redução de velocidade após a passagem pela turbina, Figura
10.
Figura 10 - Modelo de Superfície de contorno tubular
Fonte: Dissertação da Anna P. S. P. Rodigues (2007)

UNIFEI – ISEE Trabalho Final de Graduação
20
Após a passagem pelo rotor há uma expansão desse tubo e como nenhum trabalho
mecânico foi ainda fornecido, há uma queda da pressão estática para acomodar a redução da
energia cinética (Burton et al., 2001).
Uma vez que a vazão mássica é a mesma em qualquer seção do tubo, uma expansão
deste pode ser observada, Figura 11.
Figura 11 - Disco atuador
Fonte: Dissertação da Anna P. S. P. Rodigues (2007)
Levando em conta que o disco atuador induz uma variação na velocidade do
escoamento, a qual deve ser sobreposta à velocidade da corrente livre, onde a componente
desse escoamento induzido é dado por −aV0 , sendo ‘a’ o fator do escoamento induzido, a
velocidade no disco então pode ser dada por:
𝑉 = 𝑉0(1 − 𝑎) (4)
Para máquinas de rotor livre (sem carcaça) a ∈ [0,1], para máquinas com difusor este
valor aproxima-se de zero.
Considerando a velocidade local no rotor, uma nova razão de velocidade periférica
será também utilizada:

UNIFEI – ISEE Trabalho Final de Graduação
21
𝜆′ =𝜔𝑟
𝑉= (1 − 𝑎)−1𝜆 (5)
Alternativamente, um coeficiente de potência baseado na velocidade V pode ser
proposto. Este é escrito como:
𝐶′𝑝 =𝑃𝑒𝑓
12 𝜌𝐴𝑉3
(6)
É importante observar que este coeficiente é intrínseco ao desempenho hidrodinâmico
do rotor; que é relacionado à taxa de fluxo efetivo na turbina. Isto é expresso por 𝐶′𝑝 =
𝐶′𝑝(𝜆′). De outra maneira, o coeficiente de potência padrão Cp, dado na Equação 2, leva em
conta o comportamento global da máquina em um fluxo livre e sua eficiência para extrair a
potência do fluxo de energia cinética.
Abordagens metodológicas convencionais de projeto e análise de desempenho de
rotores de turbinas hidráulicas, para máquinas convencionais, envolvem frequentemente
variáveis adimensionais que agrupam parâmetros operacionais e geométricos. Considera-se
em geral a vazão Q, a altura líquida de queda H, a velocidade de rotação angular ω e o
diâmetro D, que definem as variáveis adimensionais clássicas dadas por:
=8𝑄
ᴨ𝜔𝐷3= 𝐶𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑑𝑒 𝑣𝑎𝑧ã𝑜 (7)
𝜓 =8𝐻𝑔
𝜔2𝐷2= 𝐶𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑑𝑒 𝑝𝑟𝑒𝑠𝑠ã𝑜 (8)
𝑁𝑠 =
12
𝜓34
= 𝑅𝑜𝑡𝑎çã𝑜 𝑒𝑠𝑝𝑒𝑐í𝑓𝑖𝑐𝑎 (9)
Para que a turbina hidrocinética possa utilizar as metodologias convencionais de
projeto de turbinas hidráulicas axiais, os coeficientes adimensionais nas Equações 7-9 devem
ser reescritos. Isso se faz necessário devido ao fato da turbina hidrocinética utilizar somente a
energia cinética do escoamento. Logo, para uma THC propõe-se considerar que a queda
equivalente é dada pela conversão de todo o fluxo de energia cinética em potencial, assim

UNIFEI – ISEE Trabalho Final de Graduação
22
utiliza-se 𝐻 =𝑉2
2𝑔. Desta maneira, todas as variáveis adimensionais são reduzidas às relações
funcionais simples do parâmetro λ’ como segue:
= 𝜆′−1; 𝜓 = 𝜆′−2 𝑒 𝑁𝑠 = 𝜆′ (10)
Através desta última descrição dos coeficientes da turbina, todo o comportamento
desta é parametrizado somente por uma variável. Esta consideração permite estimar os
parâmetros adimensionais equivalentes, que podem ser usados em equações empíricas de
projeto de turbinas axiais, em particular aquelas utilizadas para turbinas hélice e kaplan. Aqui
será considerada sempre que uma turbina hélice (com ou sem difusor), trabalhando em uma
condição operacional λ’, extrairá a mesma potência de uma máquina de convencional
confinada, em um ponto operacional equivalente (ψ, ).
4.1.3 Modelagem do escoamento no rotor
O modelo simplificado para o comportamento hidrodinâmico do rotor, baseia-se no
balanço de esforços em cada pá. Isto comumente é denominado de Teoria de Elementos de
Pás, que também está associada à teoria de disco atuador. Tal metodologia é bastante aplicada
em rotores eólicos, e, como em (Mesquita et al., 1999), para estudos de máquinas
hidrocinéticas, com algumas adaptações. Tal teoria é utilizada, considerando uma correção
pelo número finito de pás, tendo em vista as características de projeto associados às
geometrias de rotores utilizadas.

UNIFEI – ISEE Trabalho Final de Graduação
23
Figura 12 - Modelo de elementos de pá
Fonte: Dissertação da Anna P. S. P. Rodigues (2007)
Para desenvolver o cálculo dos esforços sobre uma pá, inicialmente a mesma é
dividida em uma série de elementos infinitesimais dr tal como mostrado na Figura 12. Para
cada elemento um balanço de esforços hidrodinâmicos é efetuado nas diferentes direções.
Figura 13 - Esforços hidrodinâmicos no elemento de pá
Fonte: Dissertação da Anna P. S. P. Rodigues (2007)

UNIFEI – ISEE Trabalho Final de Graduação
24
Na Figura 13 são apresentados os diferentes componentes de esforços sobre um
elemento de pá. Em vermelho é apresentado na Figura 13 o triângulo de velocidades do fluido
na pá. Na direção axial (Vz) a velocidade absoluta do fluido sobre a pá é dada pelo
decaimento da velocidade pelo fator de indução tal como expresso na equação, 𝑉 = 𝑉0(1 −
𝑎). No sentido circunferencial, a velocidade tangencial do fluido é dada por:
𝑉𝑡 = 𝜔𝑟(1 + 𝑎′) (11)
Onde a’ é o fator de indução tangencial. O triângulo de velocidade define, portanto o
comportamento relativo Vr e o ângulo de entrada do fluido na pá, β.
De posse de a’ para cada posição radial r pode-se calcular o ângulo β e a velocidade
relativa Vr.
Considerando o diagrama da Figura 14, o balanço da quantidade de movimento ângulo
no fluido que passa pelo disco atuador formado pelas pás do rotor pode ser considerado. Nota-
se que a variação da quantidade de movimento angular é dada pelo produto: vazão mássica x
variação de velocidade angular x raio. Isto é equivalente ao torque gerado pelo elemento dr de
todas as pás.
Figura 14 - Velocidade tangencial no rotor
Fonte: Dissertação da Anna P. S. P. Rodigues (2007)

UNIFEI – ISEE Trabalho Final de Graduação
25
O fator de indução tangencial a’ é definido de forma que a velocidade tangencial
absoluta do fluido varie entre 0 (zero) antes do rotor e 2a'ωr na esteira. Portanto, tal
velocidade no interior do rotor será de a'ωr. A velocidade tangencial relativa no rotor será
dada pela soma da velocidade do rotor ωr com a velocidade do fluido.
4.2 Tipos de rotor
Em uma maquina brushless de imãs permanentes, a escolha do tipo de maquina é a
decisão de projeto mais fundamental, devido ao custo relativamente alto de ímãs.
Existem várias configurações diferentes de maquinas brushless que usam ímãs
permanentes rotativos e bobinas de fase estacionária. A principal razão para tantas variações
diferentes tem a ver com a utilização de diferentes graus de ímã, além da ampla gama de
aplicações. Por exemplo, se uma aplicação requer uma rápida aceleração e desaceleração da
carga (como nos sistemas de servo), então a relação de inércia (binário) deve ser o mais
elevado possível. Isso indica o uso de um motor de rotor interno com ímãs de alta energia.
Por outro lado, se uma aplicação requer velocidade constante à velocidade média a alta
pode fazer mais sentido utilizar uma configuração de rotor externo com o membro rotativo no
lado de fora do estator. Este tipo é usado às vezes para controlar ventiladores e sopradores.
Talvez a aplicação mais importante para o motor de rotor externo seja o motor de fuso
(spindle) usado em unidades de disco fixo de computador. Esta aplicação requer uma
velocidade muito uniforme e constante, e a elevada inércia do rotor externo é uma vantagem
na realização deste.
Existem outros aplicativos, como gravadores, CD players e unidades de disquete para
computadores (já em desuso) que possuem um conjunto diferente de requisitos. Estes motores
rodam a uma velocidade relativamente baixa. A carcaça ou ainda o “encapsulamento” é a
consideração mais importante, e tem sido comum projetar rotores axiais ou panqueca para
muitas destas aplicações. No entanto, na maioria dos casos eles são sem ranhuras, o que
significa que o circuito magnético é fechado através de uma placa de apoio lisa que não pode
ao menos ser laminada. Os motores sem ranhuras são por vezes utilizados na configuração do
espaço radial. Os motores sem ranhuras reduzem as perdas de núcleo e são adequados para

UNIFEI – ISEE Trabalho Final de Graduação
26
aplicação em velocidades extremamente elevadas, até pelo menos 100.000 rpm (Miller e
Hendershot JR, 1994).
Independentemente do tipo escolhido de rotor, este deve possuir uma coroa capaz de
permitir que o fluxo magnético caminhe, possibilitando o fechamento do arco magnético
através do imã. A coroa do rotor é constituída, em sua maioria, de chapas de aço do tipo
ABNT 1006 sem recozimento.
Ao se tratar de motores e geradores a imã permanente, na maioria das vezes as coroas
do rotor e do estator possuem a mesma altura, sendo ambas capazes de permitir o fluxo
magnético sem que haja a saturação do material. Em alguns casos, pela simplicidades de se
constituir o rotor de apenas um tipo de material, fabrica-se o rotor inteiro de chapas de aço,
fazendo-se assim um sobredimensionamento da coroa do rotor.
Figura 15 - Tipos de rotor
Fonte: Miller e Hendershot JR (1994)
4.2.1 Rotor Interno
A máquina de rotor interno tem a configuração mais próxima da máquina síncrona AC
clássica ou do motor de indução. O estator é semelhante ao do motor de indução trifásico.

UNIFEI – ISEE Trabalho Final de Graduação
27
Conforme mencionado anteriormente, uma vantagem deste projeto é sua alta relação
torque/inércia. No entanto, tem duas desvantagens de fabricação:
1. A retenção do ímã deve ser cuidadosamente implementada de forma que o imã não
seja desacoplado.
2. Embora os estatores exteriores sejam facilmente refrigerados, é caro refrigerá-los
sem um equipamento automático.
As Figura 16 e Figura 17 mostram um exemplo da configuração de rotor interno.
Figura 16 - Gerador de imãs permanentes de fluxo radial com rotor interno. a) Vista
Compacta de um gerador, b) Vista Explodida de um gerador
Fonte: Dissertação do Francis A. M. Vasquez (2014)
Figura 17 - Configuração de um rotor interno

UNIFEI – ISEE Trabalho Final de Graduação
28
Fonte: Miller e Hendershot (1994)

UNIFEI – ISEE Trabalho Final de Graduação
29
O eixo do rotor deve ser montado em rolamentos. Ele possui um yoke de ferro doce
que tem uma superfície exterior poligonal ou circular na qual os ímãs são montados. O yoke é
usinado a partir de aço de baixo teor de carbono, ou montado a partir de uma pilha de
laminados. Laminações são geralmente empilhadas e pressionadas em uma ligeira serrilha
sobre o eixo para evitar a rotação. Os ímãs são afixados geralmente à superfície do yoke com
cuidado usando as peças limpas, os adesivos especiais, e a cola apropriada. O rotor é muitas
vezes envolto com algum material especial, tal como uma amarração de aço apropriado para
conter os ímãs em altas velocidades. A retenção do ímã é essencial para os rotores de alta
velocidade. A lata de retenção é normalmente de aço inoxidável não magnético.
4.2.2 Rotor Externo
O uso mais econômico de ímãs de ferrite em motores CC sem escovas requer uma
configuração com o rotor fora do estator. A pilha de laminados usada para o estator parece
muito semelhante à pilha de laminados em uma armadura do motor de escova CC.
Este tipo de estator é simples de se refrigerar, podendo ventilar sobre todas as fases
simultaneamente. O rotor consiste em um copo feito de ferro macio montado no eixo com
arcos magnéticos ou um ímã de anel moldado ou ligado fixado dentro do copo de rotor de
aço. Naturalmente, o equilíbrio é crítico devido à grande massa rotativa. A retenção do ímã é
fornecida pelo copo do rotor na parte externa dos ímãs. Uma vantagem desta configuração é a
utilização de um único suporte de alumínio ou zinco fundido sob pressão. A maioria dos
motores de rotor interno exige um rolamento em cada extremidade, o que resulta em dois
rolamentos gerando um custo mais elevado.
As Figura 18 e Figura 19 mostram um exemplo da configuração de rotor externo.

UNIFEI – ISEE Trabalho Final de Graduação
30
Figura 18 - Gerador de imãs permanentes de fluxo radial com rotor externo. a) Vista
Compacta, b) Vista Explodida
Fonte: Dissertação do Francis A. M. Vasquez (2014)
Figura 19 - Configuração de um rotor externo
Fonte: Miller e Hendershot (1994)
A imagem acima mostra um rotor sem escova encontrado em um ventilador que é
usado para resfriar equipamentos eletrônicos. São muito eficientes, de baixo custo,
ventiladores de funcionamento silencioso com a eletrônica incluída na placa de circuito dentro
do motor. A montagem é normalmente feita com uma grelha numa abertura no invólucro de

UNIFEI – ISEE Trabalho Final de Graduação
31
um computador ou outro equipamento. Em muitos desses projetos é requerida uma vida muito
longa.
4.2.3 Rotor Axial
Existem muitas aplicações para as quais o encapsulamento do motor brushless em
forma de “panqueca” é extremamente conveniente. Estes motores axiais normalmente
consistem de um disco de aço com um ímã em forma de uma arruela cimentada a um lado do
disco. Os materiais utilizados são ferrítes sinterizados ou ligados à terra-rara. Eles podem ser
facilmente magnetizados com tantos polos quanto necessário. O estator geralmente consiste
em enrolamentos do circuito impresso ou bobinas enroladas individuais cimentadas em uma
placa de circuito impresso.
Na figura abaixo se tem um desenho em corte de um motor “panqueca” em CC sem
escovas usadas para mover uma plataforma giratória de um tocador de discos.
Figura 20 - Configuração de Máquina de Fluxo Axial. a) Rotor simples - estator simples b)
Rotor Simples - dois estatores c) Dois rotores - estator simples d) Estrutura multiestágio
Fonte: Madani (2011)

UNIFEI – ISEE Trabalho Final de Graduação
32
Figura 21 - Configuração de um rotor axial
Fonte: Miller e Hendershot (1994)
Na Figura 21 observam-se as seis bobinas do estator montadas em uma placa redonda.
O imã é cimentado a um rotor de aço ao qual a mesa giratória está montada.
4.3 Polos do gerador
A escolha do número de polos depende de muitos fatores, alguns dos quais são os
seguintes:
- Tipo (material) e grau do imã;
- Tipo de rotor: interno, externo ou axial;
- Montagem mecânica do rotor e ímãs;
- Velocidade de rotação;
- Requisitos de inércia.
Antes de qualquer análise detalhada sobre o número de polos ser realizada, uma regra
básica deve ser considerada: O número de polos deve ser inversamente proporcional à
velocidade máxima de rotação. A razão, é claro, é limitar a frequência de comutação para
evitar perdas de comutação excessivas nos transistores e perdas de ferro no estator. Para
velocidades muito altas, os motores de dois e quatro polos são preferidos. Se for necessário

UNIFEI – ISEE Trabalho Final de Graduação
33
um torque suave em baixa velocidade, como num motor de torque de corrente contínua, deve-
se selecionar um número maior de polos.
Cada vez que o número de polos é dobrado a espessura exigida do yoke do rotor ou do
ferro traseiro dentro dos ímãs é reduzida pela metade, assim como a espessura do yoke do
estator. Portanto, para uma dada carga magnética e elétrica e um dado diâmetro do rotor, o
diâmetro total pode ser reduzido aumentando o número de polos.
À medida que o número de polos aumenta, os condutores de corrente do estator por
polo diminuem em proporção inversa, de modo que a indutância por unidade e a reatância
síncrona diminuem em motores de número de polos mais alto.
Outra forma de visualizar as informações acima é através das fórmulas:
p =k1
n 𝑦𝑜𝑘𝑒 =
k2
p p =
k3
N (12)
Onde:
p – Número de polos;
n – Rotação da máquina;
N – Número de espiras;
k1, k2 e k3 – Constantes.
yoke – Parte magnética do rotor e do estator necessária para fechar o circuito
magnético da máquina.
O número de polos do estator é comumente o número de polos do rotor.
4.4 Ranhuras
As ranhuras, também chamadas de canais, ficam no interior da máquina, no estator, a
fim de que as bobinas sejam alojadas no seu interior.
Temos que o número de ranhuras necessárias é o produto do número de polos
escolhidos pelo número de fases do gerador. Portanto:
𝑅𝑎𝑛ℎ𝑢𝑟𝑎𝑠 = 𝑝 ∙ 𝑛º 𝑑𝑒 𝑓𝑎𝑠𝑒𝑠 (13)

UNIFEI – ISEE Trabalho Final de Graduação
34
Para auxiliar a escolha do número de ranhuras a serem adotadas, podem-se utilizar
tabelas prontas, como por exemplo, a Tabela 1 que mostra as possíveis combinações para
máquinas trifásicas.
Tabela 1 - Tabela de combinações entre polos e ranhuras para máquinas trifásicas
Ranhuras 3 6 9 12 15 18 21 24 27 30 33 36 39 42 45 48
Polos
2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2
4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4
6 8 10 6 8 8 6 8 8 6 8 8 6 8
8 10 8 14 10 8 10 10 8 10 10 8 10
12 18 12 16 16 10 20 14 10 14 14 10 14
14 20 12 22 20 12 16 16 12 16
16 18 26 22 14 26 26 14 20
20 26 16 28 28 16 32
22 28 22 32 32 20 34
24 24 34 34 28 38
26 30 40
28 32
30 34
32 38
40 Fonte: Miller e Hendershot (1994)
4.5 Passo polar
Uma observação a ser feita sobre a relação de ranhuras e polo diz respeito ao passo
polar. Uma vez que as bobinas podem ser enroladas apenas num número inteiro de ranhuras, o
passo polar é determinado dividindo o número de ranhuras pelo número de polos e
arredondando para o número inteiro imediatamente inferior, ou no caso da série de 0,75
ranhuras por polos, o número inteiro maior seguinte (Miller e Hendershot, 1994).
Passo Polar = 𝐼𝐼𝐼 (𝑅𝑎𝑛ℎ𝑢𝑟𝑎𝑠
p) (14)
Onde:
III – Inteiro imediatamente inferior;
p – Número de pólos.

UNIFEI – ISEE Trabalho Final de Graduação
35
A Tabela 2 mostra alguns exemplos de passo polar.
Tabela 2 - Tabela de exemplos de passos polar
Ranhuras por Polo Passo Polar
0,75 1
1,125 1
1,5 1
2,25 2
3 3
3,75 3
4,5 4
5,25 5
6 6 Fonte: Miller e Hendershot (1994)
4.6 Número de fases
Para máquinas DC, o numero de fases mais comumente utilizado é 3, mas existem
máquinas com número de fases diferentes. Na década de 60, a Siemens lançou ao mercado
uma máquina DC de 4 fases, que necessitava de um retificador com 8 elementos, sendo dois
por fase (Miller e Hendershot, 1994).
Alem das máquinas de 4 fases, também existem máquinas com 1, 2, 3, 6 e 12 fases,
porém cada uma com aplicações específicas que não serão discutidas.
Nos motores trifásicos, existe a possibilidade de se usar enrolamentos em delta ou
estrela, alem de possuir um baixo ripple no torque e excelente caracteristicas de partida. Ele
pode operar com ampla gama de configuração tanto magnética quanto no enrolamento.
Abaixo está disposta uma comparação do numero de fases, a porcentagem de
utilização do condutor, o numero de elementos para a retificação e o ripple no torque.

UNIFEI – ISEE Trabalho Final de Graduação
36
Tabela 3 – Comparação entre número de fases e características da maquina.
Nº de fases Utilização do
condutor (%)
Nº de chaves
de potência
Ripple de
torque (%)
1 50 2 100
2 50 4 ou 8 30
3 67 6 ou 5 15
4 75 8 10
6 85 12 7
12 92 24 3
Fonte: Miller e Hendershot (1994)
4.7 Entreferro
O entreferro nada mais é que o espaço livre entre os imãs do rotor e o estator. Tal
distância, composta por ar, está diretamente relacionada com o fluxo magnético máximo dos
imãs que atingirão efetivamente o estator.
O comprimento do entreferro está relacionado de forma inversa com o coeficiente de
permeância, que é traduzido como “a parte efetiva, para geração, do fluxo máximo do imã”,
através da fórmula.
𝑃𝐶 = 𝐿𝑚
𝑔
Onde: PC – Coeficiente de permeância;
Lm – Espessura do imã (mm);
g – Comprimento do entreferro (mm).
4.8 Imãs permanentes
Os ímãs permanentes são materiais magnéticos que possuem a característica de
apresentarem uma indução magnética residual mesmo após a retirada da força magnetizante.
Assim como os indutores, os ímãs permanentes produzem fluxo magnético. A diferença é que

UNIFEI – ISEE Trabalho Final de Graduação
37
estes últimos conseguem isto sem nenhum tipo de enrolamento de excitação e sem nenhuma
dissipação de energia elétrica.
No Brasil, o mercado de materiais magnéticos movimenta algo em torno de US$ 100
milhões/ano, sendo 70% representados pelos aços elétricos e 30% pelos ímãs permanentes,
onde os ferrites ocupam a maioria das aplicações, sobretudo naquelas onde o fator
determinante é o preço baixo (Eletricidade Moderna, 1991). Entretanto, quando o fator
determinante não é o preço baixo e sim o produto energético (BHmáx), os ímãs terras-raras:
samário-cobalto e neodímio-ferro-boro, apresentam-se como alternativas aos ímãs ferrites,
principalmente quando as figuras de mérito em questão são o volume e o peso. Nos dias
atuais, estes materiais são largamente utilizados na eletroeletrônica, sobretudo em aplicações
especiais tais como: motores de posicionamento das cabeças de leitura e gravação de discos
rígidos (winchesters), motores de corrente contínua sem comutador e escovas (brushless)
(Benedito Antônio Luciano e Sissi Alves da Silva, 2011).
(Miller e Hendershot JR, 1994) aconselham que a escolha do imã a ser utilizado no
projeto deve ser descartada e ser pensada como um ponto a ser melhorado no projeto, sendo
que a escolha inicial do imã a ser utilizado fica a cargo do projetista. No entanto, desde já,
tendo em vista a aplicação a qual esse projeto é voltado, geração, é desejável que se alcance
altos valores de energia, logo a escolha do imã para o projeto se restringe aos imãs de terras-
raras.
4.8.1 Terras-raras
A primeira geração destes novos materiais, baseada na composição SmCo5 (samário-
cobalto), foi descoberta no início da década dos anos sessenta e tornada disponível
comercialmente no início dos anos setenta. As curvas de desmagnetização dos ímãs SmCo são
praticamente lineares, o que denota alta resistência a campos desmagnetizantes. Além disso,
eles possuem altos valores de produto energético, densidade de fluxo magnético remanente e
força coerciva. Entretanto, devido aos elevados preços do Sm e do Co, a utilização deste tipo
de imã fica reservada às aplicações especiais, onde o fator custo não seja a figura de mérito
determinante.
A segunda geração dos ímãs terras-raras, baseada em neodímio-ferro-boro, foi
anunciada em 1983, durante a vigésima nona Conferência Anual de Magnetismo e Materiais

UNIFEI – ISEE Trabalho Final de Graduação
38
Magnéticos, ocorrida em Pittsburg. O neodímio é um elemento terra-rara muito mais
abundante que o samário. Os ímãs NdFeB possuem maior produto energético, maior força
coerciva e maior indução remanente que os ímãs SmCo. Entretanto, ao lado destes parâmetros
altamente positivos, os ímãs NdFeB apresentam as desvantagens de alta suscetibilidade à
corrosão e grande limitação no que diz respeito à temperatura de utilização em serviço
(150°C) e temperatura de Curie (310°C). Atualmente, o preço de produção em larga escala
dos ímãs NdFeB é cerca de 70 a 90% do custo dos ímãs SmCo. A queda dos preços dos ímãs
terras-raras tem propiciado um uso crescente destes materiais magnéticos nos mais variados
campos de aplicações: equipamentos acústicos, equipamentos de informática, equipamentos
aeroespaciais, transportes, equipamentos de som e imagem, equipamentos biomédicos,
brinquedos para crianças, etc (Overshott, K. J., 1991), (Gieras, J. F. and Wing, M., 1997) e
(Strnat, K. J., 1990). Além das aplicações já citadas, os imãs terras-raras, quando empregados
em máquinas elétricas, cobrem uma larga faixa de potência (dos mW aos MW), passando
pelos motores de passo empregados em robótica, máquinas para ferramentas industriais
(acima de 15 kW) e grandes motores síncronos com potências superiores a 1 MW.
4.8.2 Grade Magnética
A grade do ímã é uma boa medida da força de um imã. Em geral, os números mais
altos indicam um ímã mais forte. O número vem de uma propriedade do material real, o
Produto de Energia Máxima (BHmax) do material magnético, expresso em MGOe (Mega
Gauss Oersteds). Ela representa o ponto mais forte sobre o ímã. A força de tração de um ímã
varia com o tipo ou número N. Dobrar o número N e você encontrará aproximadamente o
dobro da força de tração. A intensidade do campo magnético é uma medida da força e direção
do campo magnético em um determinado ponto perto do imã. É expresso em Gauss ou Tesla
(1 Tesla é igual a 10.000 Gauss). Ela depende do tamanho, forma e grau do ímã, em que a
medição é realizada, e da presença de quaisquer outros ímãs ou materiais ferromagnéticos
próximos.

UNIFEI – ISEE Trabalho Final de Graduação
39
4.8.3 Coeficiente de Permeância
Coeficiente de Permeância (PC), também chamada de linha de carga ou B/H, é a linha
na Curva de Desmagnetização onde um determinado ímã opera. O valor depende tanto da
forma quanto do ambiente que o rodeia. Em termos práticos, é um número que define a
dificuldade das linhas de campo magnético de irem do polo norte ao polo sul de um ímã
permanente. Um ímã cilíndrico “alto”, por exemplo, terá um alto PC, enquanto um ímã
cilíndrico “curto” ou “baixo” terá um baixo PC.
(Miller e Herdershot JR, 1994) descrevem o Coeficiente de Permeância (PC) como
sendo o coeficiente de inclinação da linha de carga. Esta linha une o ponto de operação (Bm)
do ímã a origem do segundo quadrante da curva de histerese. O ponto de operação é descrito
como, quando em um circuito aberto o ímã sofre um campo estático de desmagnetização, que
reduz a densidade de campo magnético residual (Br) para algo entre 70% e 95% de seu valor.
A Figura 22 mostra uma maneira gráfica de determinar o coeficiente de permeância
(PC), que ocorrerá com grande frequência, uma vez que os fabricantes de imãs disponibilizam
a curva de histerese aos clientes.
Valores usuais para o coeficiente de permeância estão entre 5 e 15, e para estimativas
iniciais adota-se 10.

UNIFEI – ISEE Trabalho Final de Graduação
40
Figura 22 - Determinação do PC através da curva de histerese
Fonte: (HANSELMAN, 1994)
O cálculo do coeficiente de permeância se dá através da Equação 15.
𝑃𝐶 =𝐿𝑚
𝑔 (15)
Onde:
PC – Coeficiente de Permeância;
Lm – Espessura do imã (mm);
g – Comprimento do entreferro.

UNIFEI – ISEE Trabalho Final de Graduação
41
4.9 Laminação e projeto da pilha do estator
Outros aspectos construtivos importantes sobre o gerador é a laminação e o design do
estator. Estes aspectos construtivos serão detalhados de forma a se apresentar uma visão de
como se dá o processo de desenvolvimento do estator.
4.9.1 Cortar as lâminas
O estator da máquina brushless consiste em uma pilha de laminados de ferro macio,
um sistema de isolamento, bobinas de fase de cobre e fios de chumbo ou conectores. Para
protótipos, as chapas podem ser cortadas por corte numérico ou por fio-EDM (usinagem por
descarga eletrostática), algumas vezes conhecida como fiação de arame. Ambos os métodos
dão dimensões muito precisas, mas o fio-EDM tende a dar uma borda mais quadrada. O
resultado é que o material utilizado não é a área da secção transversal de laminação, mas o
quadrado de um número ligeiramente maior do que o máximo Laminação de diâmetro
externo. Se forem utilizados lâminas redondas, então cerca de 21% do material é desperdício.
Se o volume é esperado para ser elevado, uma citação em um dado progressivo que soco três
de cada vez é recomendado.Isto irá reduzir muito a O preço das laminagens, porque a
utilização da prensa de punção é triplicada e em parte devido à economia de material devido
ao encaixe de três filas de punções na matriz, utilizando uma tira que não é tão larga quanto
três vezes o diâmetro do estator (Miller e Hendershot JR, 1994).
4.9.2 Empilhamento
A próxima consideração tem a ver com o empilhamento real das laminas em um
pacote. Existem essencialmente cinco maneiras de empilhá-las:
Colagem com epoxi
Rebitagem
Soldagem
Auto-correção
Revestimentos de entalhe

UNIFEI – ISEE Trabalho Final de Graduação
42
O método de ligação por colagem com epoxi é normalmente utilizado para protótipos
ou pequenas quantidades. O Epóxi na forma de um revestimento de pulverização fino é
aplicado a pelo menos um lado de cada lamina antes de serem empilhadas, então são fixadas e
aquecidas para curar o epóxi. Outra forma disso é alinhar, prender, pré-aquecer e aplicar
Loctite®, que penetra entre as laminagens e as liga.
Outro método é proporcionar orifícios na matriz de estampagem para aceitar rebites de
passagem que são estacados no lugar. Os furos devem estar localizados em pontos no circuito
magnético de modo que os circuitos elétricos formados por curto-circuito das laminas aos
rebites não terão correntes induzidas significativas neles. Os furos do rebite são geralmente
perto do diâmetro exterior da laminação.
Outro procedimento comum é soldagem automática TIG (tungstênio / gás inerte). Isso
pode ser usado em uma linha de montagem automática para baixo custo, produção de alto
volume.
Um método popular de empilhar e reter laminados em embalagens que não necessitam
de soldadura é utilizar um molde de perfuração progressivo com uma estação no final do
processo de estampagem que faz uma pequena indentação em cada laminação. Os dentes
sobressaem no outro lado de cada lamina, proporcionando uma acão de autocorte quando elas
estão aninhadas juntas sob pressão. As cavidades são geralmente localizadas na vizinhança
dos dentes.
Uma maneira comum de manter as pilhas juntas até serem enroladas durante a
produção de motores de indução de corrente alternada é facilmente utilizada para motores DC
sem escova devido à similaridade das laminagens do estator. Este método utiliza punhos em
cada extremidade dos revestimentos de ranhura que são automaticamente inseridos nas
aberturas do entalhe do estator. Os punhos em cada extremidade da pilha de laminação são
dobrados para trás automaticamente e mantêm a pilha bem ajustada até que fique enrolada e
envernizada. Este é um excelente método para a fabricação automática de alta velocidade de
motores brushless que pode ser emprestado ou adaptado de linhas de produção de motores de
indução. As embalagens esticadas podem ser feitas após o enrolamento usando este sistema
(Miller e Hendershot JR, 1994).

UNIFEI – ISEE Trabalho Final de Graduação
43
4.9.3 Isolamento dos slots
Uma vez que a pilha de laminação está em uma forma de embalagem, ela deve ser
isolada. Há várias maneiras de se isolar a pilha. Para os protótipos, são utilizados folheados de
corte manual e isoladores de extremidade ou, se o equipamento estiver disponível, pode ser
utilizado um sistema de revestimento epóxi com leito fluidizado. Para motores de produção de
alto volume, um isolador de plástico moldado é comumente usado para pequenas máquinas
sem escova, geralmente uma em cada lado da pilha. O método mais comum para motores
maiores é o forro de slot de cuffed, como usado em motores de indução CA.
Um sistema de isolamento separado, tal como os pedaços de plástico moldado ou os
forros de ranhura com punho, é desejável para sistemas de isolamento de alta confiabilidade.
Qualquer tipo de técnica de revestimento epóxi está sujeita a dificuldades com o controle do
processo, e falhas podem ocorrer. A altura do punho acima de cada lado da embalagem de
laminados é ligeiramente maior do que o mínimo especificado para assegurar que o
cruzamento dos terminais de bobina não pode ser curto-circuito nas laminagens (Miller e
Hendershot JR, 1994).
4.9.4 Enrolamento e inserção das bobinas de fase
As bobinas de fase podem ser colocadas no pacote de laminação isolada de várias
maneiras. O método utilizado para protótipos é fazer uma bobina de forma e tamanho
aproximado. Geralmente as bobinas em um conjunto ou fase são enroladas continuamente,
com o fio de acabamento da primeira bobina contínua com o fio de partida da segunda bobina
e assim por diante para minimizar o número de interconexões. Para fabricação de produção de
estator de motor brushless, se a distância entre o lado inicial e final de uma bobina não é mais
de um ou dois slots, enroladores podem ser usados para enrolar as bobinas no lugar. Também
é possível usar uma máquina de três agulhas com três arranques e enrolar as três fases
simultaneamente.
O outro método automático do enrolamento é usar o equipamento de enrolamento do
motor da indução CA. Geralmente as bobinas das fases são enroladas separadamente e
colocadas em fendas de ferramentas que se encaixam no pacote de laminação particular. A
carga manual de um pacote de estator ou carregamento automático de um conjunto de estator

UNIFEI – ISEE Trabalho Final de Graduação
44
para uma segunda estação permite a inserção automática das bobinas terminadas nas ranhuras
isoladas da embalagem. Esse processo é às vezes chamado de "coil-shooting". É importante
notar que quando a inserção manual das bobinas de fase é utilizada, o padrão de enrolamento
pode ser do tipo conhecido como "enrolamento de volta". As bobinadeiras de agulhas podem
enrolar bobinas de enrolamento, mas ferramentas intrincadas são necessárias e este método
geralmente é limitado a enrolamentos de passo simples ou de dois intervalos de fenda (Miller
e Hendershot JR, 1994).
4.9.5 Envernizamento
O envernizamento ou encapsulamento é necessário para proporcionar um percurso de
condução de calor a partir das voltas de cobre interiores para a pilha de laminação. Durante
um período de tempo prolongado se os condutores não forem mantidos por verniz, o
movimento entre eles causado por forças eletromagnéticas acabaria por se esgotar através do
isolamento do verniz nos fios e causar curvas de curto-circuito elétricas. Uma terceira razão
para envernizar é proporcionar uma resistência dielétrica mais elevada do que o ar que de
outro modo ficaria entre as espiras do fio magnético isolado. Finalmente, o verniz exclui a
umidade, poeira e produtos químicos que poderiam ter um efeito dieletrico sobre a integridade
do isolamento (Miller e Hendershot JR, 1994).
4.9.6 Enrolamento com condutores de fios múltiplos
Muitas vezes, quando o número final de voltas é calculado para um projeto sem
escova específico, o tamanho do condutor de cobre é muito grande para ser enrolado por um
desses métodos. Não é incomum enrolar vários fios de fio magnético isolado na mão,
utilizando medidores mais finos, para ser equivalente à secção transversal do calibre desejado.
Isto, obviamente, proporciona a mesma resistência de fase que o condutor único, mas permite
que um conjunto mais flexível de bobinas seja enrolado mais eficazmente. Um dos problemas
com condutores de múltiplas cadeias é a dificuldade de unir cabos. Muitos servo motores
brushless usam conectores MS para cabos de alimentação e cabos de sinal de comutação
(Miller e Hendershot JR, 1994).

UNIFEI – ISEE Trabalho Final de Graduação
45
4.9.7 Minimização de perdas
A baixa velocidade, a perda predominante é a perda no cobre. A maneira de minimizar
isso é preencher as ranhuras com o máximo de cobre possível. Cramming de cobre para os
slots não só reduz a densidade de corrente, mas também melhora a condução térmica do calor
dos condutores para a pilha de laminação, especialmente quando as bobinas são envernizadas
ou encapsuladas. A maximização do calibre de fio reduz a resistência de fase R, mas não tem
efeito significativo sobre a indutância, porque esta depende apenas do numero de voltas.
A segunda maior perda nos motores brushless é a perda no núcleo, que é devido a
correntes parasitas e histerese magnética nas laminagens. As perdas de correntes de Foucault
podem ser reduzidas usando chapas mais finas, ou usando chapa de núcleo com uma alta
resistividade elétrica tal como aço de silício de 1,5% ou 3%. Ambas as alternativas aumentam
o custo. Para motores de alta velocidade, o uso de aço de silício e chapas finas deve ser
combinado com um baixo nível de densidade de fluxo, especialmente nos dentes do estator.
No entanto, em muitos casos os motores de alta velocidade são utilizados em aplicações onde
o resfriamento líquido direto ou indireto está disponível, permitindo uma densidade de perda
muito alta sem causar uma temperatura excessivamente alta no núcleo e enrolamentos.
As perdas na chapa de núcleo não são susceptíveis de cálculos precisos e são
susceptíveis de variar como resultado da temperatura, tensão mecânica e imperfeições na
fabricação. Até recentemente, os dados de perda de núcleo em diferentes freqüências e
densidades de fluxo eram escassos, mas muitas empresas siderúrgicas e organizações de
pesquisa estão disponibilizando dados por causa do uso generalizado de motores de
velocidade variável, controlados eletronicamente.
Uma limitação fundamental das máquinas sem escova de ímã permanente é que o
campo dos ímãs não pode ser variado. Isto significa que as perdas de núcleo sem carga a alta
velocidade têm de ser toleradas e não podem ser reduzidas como podem numa máquina de
ferragem (Miller e Hendershot JR, 1994).

UNIFEI – ISEE Trabalho Final de Graduação
46
4.9.8 Número de dentes do estator e dimensões do núcleo
Uma vez determinado o número de polos do rotor, é necessário determinar o número
de dentes do estator que terão de transportar o fluxo de um único pólo. Isto é feito
comparando a extensão do pólo do rotor com a extensão do dente do estator. Se apenas um
dente atravessa um pólo de cada vez, então a largura desse dente deve ter secção transversal
suficiente para transportar o fluxo total do pólo. Se dois dentes estendem um pólo,
obviamente a área da secção transversal dos dentes no estator pode ser reduzida
proporcionalmente. Se a velocidade extremamente alta é esperada então a densidade de fluxo
pode precisar ser limitada usando secções transversais maiores do ferro para minimizar perdas
do núcleo (Miller e Hendershot JR, 1994).
4.9.9 Pontas dos dentes do estator
Um dos aspectos mais importantes do projeto da laminação para motores sem escovas
que usam ímãs permanentes é a profundidade radial das pontas dos dentes. Muitas vezes essas
pontas de dente do estator são muito finas sujeitas a saturação. Quando as bordas dos pólos
magnéticos giram e sobrepõem as pontas de dente salientes, a saturação ocorre. Esta saturação
das pontas tem um efeito semelhante ao de ter uma abertura de fenda muito grande entre os
dentes. Como regra geral, a espessura das pontas dos dentes deve ser a mesma dimensão da
sua largura, além de um raio generoso nos cantos para que a saturação não ocorra (Miller e
Hendershot JR, 1994).
4.9.10 Cogging skew
Tem sido afirmado anteriormente que o uso de designs de slots integrais provoca
torque extensivo ou de retenção. Um design de ranhura integral é aquele em que o número de
pólos do rotor divide-se uniformemente no número de ranhuras do estator. O cogging é
exacerbado pelo fato de que cada aresta de cada pólo alinha com as aberturas do entalhe do
estator à medida que o rotor gira. Se o número de pólos do rotor não se divide uniformemente
no número de ranhuras do estator, o torque de giro ou de retenção é muito reduzido. O preço

UNIFEI – ISEE Trabalho Final de Graduação
47
pago pelo uso de desenhos de fendas fracionárias é uma possível redução do torque, causada
por uma redução no fator de enrolamento resultante de restrições na distribuição de bobinas
de fase com um valor ímpar ou não (Miller e Hendershot JR, 1994).
4.9.11 Gerenciamento de voltas de extremidade
Muitas configurações de estator sem escova, especialmente aquelas desenvolvidas a
partir de produtos de motor de indução CA, exibem grandes voltas de extremidade de slot
para slot em cada extremidade da pilha. A fim de conter estas voltas de extremidade, é
necessário amarrá-las com corda antes do envernizamento. Isto pode ser feito à mão para
pequenas quantidades ou o uso de máquinas de laço automático pode ser empregado se eles
estiverem disponíveis. O ponto é que é necessário reter estas voltas de extremidade antes do
envernizamento para garantir que a sua localização é controlada e não resulta em quaisquer
situações de curto-circuito causadas pelo desgaste do isolamento do verniz. Antes das voltas
de fim serem atadas é geralmente aconselhável intercalar folhas de fibra de vidro entre as
voltas de extremidade das bobinas. As grandes voltas de extremidade podem ser compactadas
num processo conhecido como "bloqueio" ou "formação" num conjunto de matrizes de
bloqueio (Miller e Hendershot JR, 1994).
4.10 Coroa do rotor
A altura da coroa do rotor depende do valor de pico da indução no entreferro, da
largura do imã, do comprimento axial equivalente do rotor, do valor de pico de indução na
coroa do rotor e do comprimento ativo do rotor.
O cálculo é efetuado através da Equação 16:
ℎ𝑦𝑟 =𝐵�� ∙ 𝑏𝑚 ∙ 𝑙𝑒
2 ∙ 𝐵𝑦�� ∙ 𝑙 (16)

UNIFEI – ISEE Trabalho Final de Graduação
48
Onde:
hyr – altura da coroa do rotor.
Bδ – pico da indução no entreferro
bm – largura do imã
le – comprimento axial equivalente do rotor
Byr – valor de pico de indução na coroa do rotor
l – comprimento ativo do rotor
Esse cálculo é muito parecido com o da coroa do estator, que por sua vez é feito
através da Equação 17:
ℎ𝑦𝑠 =𝐵�� ∙ 𝑏𝑚 ∙ 𝑙𝑒
2 ∙ 𝐵𝑦�� ∙ 𝑙 (17)
Onde:
hys – altura da coroa do estator.
Bys – valor de pico de indução na coroa do estator.
4.11 Retificadores
A tensão gerada pelo alternador modificado será uma tensão alternada, ou seja, muda
de polaridade a cada instante, seguindo uma certa frequência, que por sua vez é estabelecida
de acordo com as características do rio e da turbina. A tensão alternada gerada não é
apropriada para alimentação de equipamentos, uma vez que o nível de tensão, frequência e
forma de onda serão diferentes dos padrões estabelecidos para os equipamentos. A fim de se
obter uma tensão adequada, é recomendado que se utilize um retificador, podendo assim
carregar uma bateria, por exemplo.
Os retificadores são dispositivos capazes de transformar uma forma de onda alternada,
seja ela qual for, em contínua. Eles podem ser classificados de acordo com o número de fases
de entrada possuindo uma, três, seis ou mais fases, de acordo com o tipo de conexão realizada

UNIFEI – ISEE Trabalho Final de Graduação
49
(meia ponte ou ponte completa) e de acordo com o controle da retificação, sendo controlado
ou não.
Os retificadores não controlados são construídos com diodos, uma vez que esse
dispara quando a tensão do seu anodo é mais positiva que a tensão do seu lado catodo. Já os
retificadores controlados são constituídos de tiristores, que através de um circuito de disparo,
pode-se escolher o momento adequado do disparo, controlando a tensão de saída, porém
assim como os diodos, só consegue disparar caso a tensão anodo-catodo seja positiva.
Os retificadores de um caminho ou meia ponte, são dispositivos constituídos de diodos
apenas em um sentido e, são capazes de retificar apenas a parte positiva das ondas de
entradas. Os retificadores de dois caminhos ou de ponte completa, por sua vez, são capazes de
retificar tanto a parte positiva quanto a parte negativa das ondas de entrada.
A configuração dos retificadores de onda completa monofásico e trifásico estão
mostrados na Figura 23.
Figura 23 - Tipos de retificadores. a) Retificador monofásico de onda completa b) Retificador
trifásico em ponte
Fonte: www.feis.unesp.br
Usualmente os dispositivos de meia onda não são muito utilizados devido à baixa
eficiência e a poluição que causa na rede de entrada, porém como o alternador automotivo é
um sistema isolado da rede elétrica, esse sistema é utilizado nos alternadores para converter a
tensão alternada de saída do alternador em tensão contínua.

UNIFEI – ISEE Trabalho Final de Graduação
50
O esquema de ligação de um retificador trifásico meia ponte é apresentado na Figura
24.
Figura 24 - Retificador trifásico não controlado meia ponte
Fonte: www.forosdeelectronica.com
Para se aproveite ao máximo a potência gerada, recomenda-se utilizar um retificador
trifásico em ponte.

UNIFEI – ISEE Trabalho Final de Graduação
51
5 Resultado e Discussão
Este capítulo mostra o conceito adquirido no quarto capítulo sendo usado de fato ao
projeto, ou seja, a teoria sendo aplicada no projeto.
5.1 Velocidade de rotação e escoamento
A velocidade de rotação depende da velocidade de escoamento, que por sua vez é
variável, ou seja, depende das características do rio em questão.
A velocidade de rotação varia entre uma faixa de 60 a 100 rpm para um rotor com
diâmetro externo de 0,6 m e interno de 0,15 m e sem difusor (Anna Rodrigues, 2007). Para
este trabalho será utilizada esta configuração de rotor mantendo a velocidade do escoamento
em 𝑉0 = 2 m/s.
5.2 Especificação do rotor
O tipo de rotor a ser utilizado é um dado que deve ser definido no inicio do projeto.
O objetivo deste trabalho é projetar as modificações necessárias em um alternador
automotivo para que este se torne um gerador sem escovas de imã permanente.
Os alternadores de carro possuem características semelhantes, sendo uma dessas
características o rotor interno.
A Figura 25 é uma foto do alternador que será utilizado como base para esse projeto,
com o estator e o rotor separados.

UNIFEI – ISEE Trabalho Final de Graduação
52
Figura 25 - Alternador automotivo com rotor interno base para o projeto
Fonte: Fotos tiradas pelos autores do TFG (2016)
Pode-se observar, nesse caso, que o rotor do alternador automotivo é do tipo interno.
Logo, a fim de se obter o gerador de forma a se aproveitar a configuração do
alternador é necessário que o rotor do gerador também seja do tipo interno.
5.3 Especificação do número de polos, número de ranhuras e do passo
polar
Da mesma forma que se manteve o rotor interno, pelo fato de não se necessitar de
alterações ‘bruscas’ no design do gerador, a configuração do número de ranhuras, número de
polos e, por consequência, do passo polar, não será alterada.
Logo, como se adotou um alternador automotivo, a quantidade de polos e ranhuras já
está estabelecida:
Tabela 4 - Número de polos e ranhuras do gerador
Polos Ranhuras
14 42
Fonte: Desenvolvida pelos autores do TFG (2017)

UNIFEI – ISEE Trabalho Final de Graduação
53
E o passo polar do alternador automotivo em questão será dado por:
Passo Polar = III (42
14) Passo Polar = 3 (18)
5.4 Escolha do número de fases
O funcionamento do gerador hidrocinetico em questão é similar ao de uma máquina
DC, porém, o retificador funciona retificando a forma de onda da saída, sendo gerada uma
onda trifásica no interior da máquina.
Para este projeto em especial, foi adotado o numero de fases igual a 3 (três), uma vez
que é o mais comum para motores de baixa potência, existe uma certa facilidade para
encontrar bons retificadores como o retificador de 6 pulsos e o fato de o alternador a ser
modificado já ter sido projetado para três fases, com numero de ranhuras e polos para isso.
Optou-se ainda pela ligação em estrela das bobinas, com o objetivo de se obter uma
maior tensão de saída do gerador.
5.5 Escolha do entreferro
O comprimento do entreferro varia também de acordo com a potência da máquina.
Usualmente são utilizados valores que variam de 0,13 a 0,9 milímetros.
Como se trata de um projeto com considerável dificuldade na precisão e no decorrer
do projeto, adotou-se g como 1 mm.
5.6 Escolha dos imãs
Como os requisitos de aplicação determinam alta densidade de energia, a escolha do
imã para o projeto recaiu nos imãs de terras raras, mais especificamente, no neodímio
(NdFeB).

UNIFEI – ISEE Trabalho Final de Graduação
54
Através da tabela Propriedades Magnéticas de Sinterizados de NdFeB do Anexo A,
escolheu-se um imã de grade N30 devido ao seu menor custo.
Os imãs N30 possuem densidade magnética de 1,08 – 1,12 T. Com base nas fichas
técnicas dos imãs do Grupo Super Imãs, inferiu-se que para um imã com as dimensões
esperadas, têm-se uma diminuição na densidade magnética à medida que se distância da
superfície do mesmo. Para uma distância de 1 mm, devido ao entreferro, a densidade
magnética é reduzida em aproximadamente 5%. Logo a densidade magnética aproveitada pelo
gerador será de 1,026 T.
5.6.1 Cálculo da espessura do imã
Sabendo-se que o entreferro terá 1 mm e que o coeficiente de permeância é igual a 10,
pode-se então, calcular a espessura do imã.
Com o coeficiente de permeância determinado e escolhido o valor do entreferro, é
possível se determinar a espessura do imã através da Equação 19.
Portanto, temos que:
𝐿𝑚 = 𝑃𝐶 ∙ 𝑔 𝐿𝑚 = 10 ∙ 1 𝐿𝑚 = 10 𝑚𝑚 (19)
Onde:
PC – Coeficiente de Permeância;
Lm – Espessura do imã (mm);
g – Comprimento do entreferro.
5.6.2 Dimensões do Imã
Após definir o tipo de imã a ser usado, é necessário que se defina suas dimensões.
A espessura do imã já foi calculada e corresponde a 10 mm, faltando agora que se
defina a largura e comprimento do mesmo.

UNIFEI – ISEE Trabalho Final de Graduação
55
Temos que a largura do dente do estator, onde o fluxo penetra, corresponde a 20 mm,
portanto se o imã possuir uma largura maior do que este, o fluxo estará sendo perdido e se for
menor, a capacidade de absorção do fluxo não estará sendo totalmente aproveitada. Conclui-
se que a largura do imã dever ser 20 mm.
Para que se aproveite da melhor maneira o fluxo produzido pelo imã, seu comprimento
linear deve ser o perímetro do rotor dividido pela quantidade de imãs, neste caso a quantidade
de polos, ou seja, 14.
O diâmetro do rotor é de 10,4 cm, logo seu comprimento linear será de 24 mm.
Figura 26 - Projeto do gerador com os imãs já instados
Fonte: Desenvolvido pelos autores (2017)
5.7 Cálculo da coroa do rotor
Para os valores de pico de indução no entreferro 𝐵��, na coroa do rotor 𝐵𝑦�� e na coroa
do estator 𝐵𝑦��, por conta dos valores limitados de fluxo remanente e para evitar a saturação no
ferro, foi admitido o valor de 1,6 T tanto para o rotor quanto para o estator.
Por outro lado, temos que a coroa do estator já tem sua altura pré-definida, uma vez
que foi adquirido um alternador já projetado, sendo essa altura de ℎ𝑦𝑠 igual a 0,01 metros.
Dessa forma, não é difícil concluir, por semelhança entre a Equação 16 e Equação 17
que a altura da coroa do rotor é de 0,01 metros, uma vez que os valores do pico de indução no

UNIFEI – ISEE Trabalho Final de Graduação
56
entreferro, largura do imã são os mesmos para ambos os casos e os valores de pico de indução
na coroa do rotor e na coroa do estator são iguais.
5.8 Cálculo do fluxo
Para calcular o fluxo que será fornecido por cada imã é necessário que se saiba a
densidade de fluxo magnético (B) e a área de cada imã.
A densidade de fluxo magnético foi definida na seção “Escolha dos imãs” e possui o
valor de 1,026 T. Já o comprimento, necessário para o cálculo da área, pode ser obtido
levando em consideração que cada imã ocupa 1/16 do perímetro do rotor, de forma que os
imãs não fiquem colados uns aos outros.
Logo o comprimento (c) pode ser calculado pela Equação 20.
𝑐 =2𝜋𝑟
16 𝑐 =
2𝜋∙0,06
16 𝑐 = 0,02356 𝑚 = 23,56 𝑚𝑚 (20)
Para o cálculo da área precisa-se ainda da largura do imã (li), que deve ser igual à
largura do dente do estator, ou seja, 20 mm.
Com base nesses dados, pode-se agora calcular a área de cada imã, conforme Equação
21.
Á𝑟𝑒𝑎 = 𝑐 ∙ 𝑙𝑖 Á𝑟𝑒𝑎 = 0,02356 ∙ 0,02 Á𝑟𝑒𝑎 = 4,71 ∙ 10−4 𝑚2 (21)
Tendo a área do imã e a densidade de fluxo magnético de cada um deles, calcula-se
então o fluxo magnético (φ) através da Equação 22.
𝜑 = 𝐵 ∙ Á𝑟𝑒𝑎 𝜑 = 1,026 ∙ 4,71 ∙ 10−4 𝜑 = 4,8349 ∙ 10−4 𝑊𝑏 (22)
Onde:
φ – Fluxo magnético;
B – Densidade de fluxo magnético.

UNIFEI – ISEE Trabalho Final de Graduação
57
5.9 Cálculo do número de espiras por fase
Para o cálculo do número de espiras por fase, utilizaremos a Equação 23 (Chapman,
2013).
𝐸∅ = √2𝜋𝑓𝑁𝜑𝑘𝑒 (23)
Onde:
E∅ - Tensão de fase;
f – Frequência;
N – Número de espiras por fase;
φ – Fluxo magnético;
ke – Fator de enolamento.
5.9.1 Fator de enrolamento
O fator de enrolamento (ke) é a combinação do fator de passo e do fator de
distribuição.
Algumas vezes, uma bobina é construída, abrangendo menos de 180 graus elétricos.
Tal bobina é denominada bobina de passo encurtado ou fracionário e um enrolamento com
bobinas de passo encurtado é denominado enrolamento encurtado. O grau de encurtamento de
um enrolamento é descrito por um fator de passo (kp).
Para calcular-se o fator de passo do gerador projetado neste trabalho é necessário que
antes se calcule o ângulo mecânico e o ângulo elétrico do enrolamento. O ângulo mecânico do
enrolamento pode ser calculado através da Equação 24.
𝜃𝑚 =360
𝑝 𝜃𝑚 =
360
14 𝜃𝑚 = 25,71° (24)

UNIFEI – ISEE Trabalho Final de Graduação
58
E o ângulo elétrico do enrolamento pode ser calculado através da Equação 25.
𝜃𝑒 =𝑝
2𝜃𝑚 𝜃𝑒 =
14
2
360
14 𝜃𝑒 = 180° (25)
Onde:
θe – Ângulo elétrico em graus;
θm – Ângulo mecânico em graus;
p – Polos.
Em posse do valor do ângulo elétrico do enrolamento é possível calcular-se o fator de
passo a partir da Equação 26.
𝑘𝑝 = 𝑠𝑒𝑛 (𝜃𝑒
2) 𝑘𝑝 = 𝑠𝑒𝑛 (
180
2) 𝑘𝑝 = 1 (26)
O valor obtido para o fator de passo é coerente com o valor esperado, uma vez que o
enrolamento do gerador é de passo pleno e não de passo encurtado ou fracionário.
A divisão do número total de espiras necessárias em bobinas separadas permite um
uso mais eficiente da superfície interna do estator e propicia uma resistência estrutural mais
elevada, porque as ranhuras abertas na estrutura do estator podem ser menores. Entretanto, o
fato de que as espiras que compõem uma dada fase estão em ângulos diferentes significa que
suas tensões serão menores do que poderia ser esperado se fosse de outro modo.
A razão entre a tensão real em uma fase de um enrolamento distribuído e o valor
esperado no caso de um enrolamento concentrado, para o mesmo número de espiras, é
denominada fator de distribuição do enrolamento. O fator de distribuição é definido segundo a
Equação 27 (Chapman, 2013).
𝑘𝑑 =𝐸∅𝑟𝑒𝑎𝑙
𝐸∅ 𝑒𝑠𝑝𝑒𝑟𝑎𝑑𝑎 𝑠𝑒𝑚 𝑑𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑖çã𝑜 (27)

UNIFEI – ISEE Trabalho Final de Graduação
59
O enrolamento do gerador em questão é concentrado, ou seja, as espiras não possuem
divisões em bobinas separadas o que faz com que o fator de distribuição seja igual a 1.
Outra forma de entender o fator de distribuição é imaginar que, para bobinas
concentradas, quando o polo sul passa em uma extremidade da bobina e o norte passa na outra
ao mesmo tempo tem-se um valor de tensão e que, no caso de bobinas separadas, têm-se
tensões com ângulos diferentes para cada bobina de uma determinada fase, que quando
somadas resultam em uma tensão menor do que a tensão no caso de bobinas concentradas.
Para que se ajuste o valor da tensão resultante é necessário que se utilize um fator de
compensação que é o fator de distribuição.
5.9.2 Cálculo da frequência
A frequência é obtida através da velocidade de rotação da turbina. Como visto na
seção “velocidade de rotação e escoamento”, a velocidade de rotação de uma turbina
hidrocinética varia entre uma faixa de 60 a 100 rpm, portanto será adotada uma rotação de 80
rpm.
A velocidade angular de rotação para uma rotação de 80 rpm é dada pela Equação 28.
𝜔 =2𝜋𝑛
60 𝜔 =
2𝜋∙80
60 𝜔 = 8,38 𝑟𝑎𝑑/𝑠 (28)
Onde:
ω – Velocidade angular de rotação (rad/s);
n – Velocidade de rotação (rpm).
Sabendo-se a velocidade angular de rotação, calcula-se então a frequência. A
frequência (f) é calculada a partir da Equação 29.
𝑓 =𝜔
2𝜋 𝑓 =
8,38
2𝜋 𝑓 = 1,33 𝐻𝑧 (29)

UNIFEI – ISEE Trabalho Final de Graduação
60
5.9.3 Tensão desejada por fase
A tensão desejada por fase é baseada na ideia de que a tensão de saída de um
retificador trifásico de onda completa conectada na saída do gerador seja suficiente para
alimentar uma bateria de 12 Volts. Sabendo-se que para carregar uma bateria de 12 Volts é
necessária uma tensão de aproximadamente 14 Volts e que a tensão de saída de do retificador
trifásico é aproximadamente 1,35 vezes a tensão de linha de entrada, adotou-se uma tensão
desejada por fase de 6 Volts.
A Equação 30 e Equação 31 demonstram a justificativa da escolha.
𝐸𝑙 =𝑉𝑐𝑐
1,35 𝐸𝑙 =
14
1,35 𝐸𝑙 = 10,37 𝑉𝑜𝑙𝑡𝑠 (30)
𝐸∅ =𝑉𝑙
√3 𝐸∅ =
10,37
√3 𝐸∅ = 5,99 𝑉𝑜𝑙𝑡𝑠 (31)
Onde:
El – Tensão de linha;
E∅ – Tensão de fase;
Ecc - Tensão na saída do retificador.
5.9.4 Número de espiras por fase
Com base nos valores calculados até aqui, pode-se calcular o número de espiras por
fase através da Equação 23.
Sabe que o valor do fator de enrolamento é dado através da Equação 32.
𝑘𝑒 = 𝑘𝑝𝑘𝑑 𝑘𝑒 = 1 ∙ 1 𝑘𝑒 = 1 (32)
Onde:
ke – Fator de enrolamento;

UNIFEI – ISEE Trabalho Final de Graduação
61
kp – Fator de passo;
kd – Fator de distribuição.
Isolando o número de espiras (N) da Equação 23, obtém-se a Equação 33.
𝑁 =𝑉𝛷
√2𝜋𝑓𝜑𝑘𝑒 𝑁 =
6
√2𝜋∙1,33∙4,8349∙10−4∙1 𝑁 = 2095 𝑒𝑠𝑝𝑖𝑟𝑎𝑠 (33)
O número de espiras por bobina (Nb) é dado pela Equação 34.
𝑁𝑏 =𝑁
𝑝 𝑁𝑏 =
2095
14 𝑁𝑏 = 150 𝑒𝑠𝑝𝑖𝑟𝑎𝑠 (34)
5.10 Cálculo da seção do fio
A seção escolhida para o fio a ser usado no enrolamento do estator definirá a
capacidade de corrente elétrica que poderá percorrer através do mesmo.
A escolha da seção do fio tem que atender dois critérios básicos. O primeiro critério
diz respeito à acomodação das bobinas dentro das ranhuras do estator. Cada ranhura do estator
acomodará as espiras de duas bobinas adjacentes, uma vez que o enrolamento é imbricado. E
o segundo critério diz respeito a seção do fio versus sua capacidade de condução de corrente.
Deverá ser escolhida a maior seção possível, desde que se respeite o primeiro critério, a fim
de que se possa conduzir a maior corrente possível.
A seção do fio utilizado é circular o que dificulta o cálculo de quantas espiras podem
ser acomodadas dentro da área correspondente a ranhura. Para fazer este cálculo de forma
mais precisa utilizou-se o software Drive Calculator.
Como dados de entrada, é necessário que se saiba as dimensões das ranhuras do
estator. Estas dimensões encontram-se na Tabela 5.

UNIFEI – ISEE Trabalho Final de Graduação
62
Tabela 5 - Dimensões das ranhuras do estator
Largura interior [mm] Largura exterior [mm] Comprimento [mm]
5 7 10
Fonte: Desenvolvida pelos autores do TFG (2017)
Com base nas medidas do estator, o software Drive Calculator calcula a seção do fio a
ser utilizado, bem como a capacidade de corrente que pode ser fornecida na saída do gerador
quando este possui um sistema de refrigeração adequado. A Figura 27 mostra o resultado
apresentado pelo software.
Figura 27 - Cálculo da seção do fio através do software Drive Calculator
Fonte: Software Drive Calculator (2017)

UNIFEI – ISEE Trabalho Final de Graduação
63
Observa-se então que um fio com 0,2859 mm de diâmetro ou 29 AWG, possui os
requisitos necessários para o projeto, ou seja, as ranhuras comportarão 300 espiras e a
corrente máxima após a retificação para um enrolamento em estrela é de 6,49 A.
5.11 Especificação da potência do gerador
Para o cálculo da potência do gerador é necessário saber qual a tensão e corrente de
saída, ou seja, após a retificação.
Vimos que a tensão será de 14 Volts e a corrente de 6,49 A.
No entanto, é necessário saber se essa potência pode ser de fato fornecida, ou seja, se a
potência cinética disponível permite que se obtenha esta potência elétrica. Para isso é
necessário que se calcule a potência cinética disponível.
Suponha-se que a velocidade de corrente do rio seja igual a 2 m/s, que a velocidade no
disco, ou seja, a velocidade da correnteza no rotor, seja 1 m/s e sabendo-se que a massa
específica da água é igual a 1000 kg/m³ e que o diâmetro da hélice é 0,6 m, pode-se
determinar a potência disponível através da Equação 36, mas antes é necessário que se calcule
a área do rotor, Equação 35.
𝐴 = 𝜋𝑟2 𝐴 = 𝜋 ∙ 0,32 𝐴 = 0,29 𝑚² (35)
𝑃 =1
2𝜌𝐴𝑑𝑉3 𝑃 =
1
2∙ 1000 ∙ 0,29 ∙ 13 𝑃 = 145 𝑊 (36)
Onde:
P – Potência disponível;
ρ – Massa específica da água;
Ad – Área do difusor;
V – Velocidade no disco.

UNIFEI – ISEE Trabalho Final de Graduação
64
Segundo o limite de Betz, não é possível extrair mais do que 59% da potência cinética
disponível. Será utilizado coeficiente de potência ainda mais baixo, 50%, devido às perdas
mecânicas do processo. Logo a potência efetiva se dá pela Equação 37.
𝑃𝑒𝑓 = 𝐶′𝑝𝑃 𝑃𝑒𝑓 = 0,5 ∙ 145 𝑃𝑒𝑓 = 72,5 𝑊 (37)
Onde:
Pef – Potência efetiva;
C’p – Coeficiente de potência real;
P – Potência disponível.
Sabe-se que a potência é o produto da tensão pela corrente. Analisando o valor da
potência efetiva disponível, 72,5 W, chega-se a conclusão que de a corrente inferida na seção
anterior é impraticável devido a indisponibilidade de potência, logo os valores nominais dos
geradores são os mostrados na Tabela 6.
Tabela 6 – Dados nominais do gerador
Potência [W] Tensão [E] Corrente [A]
72,5 14 5,18
Fonte: Desenvolvida pelos autores do TFG (2017)
5.12 Simulação
A simulação do gerador projetado até aqui é de suma importância para a constatação
de possíveis erros de projeto. Tais simulações foram realizadas utilizando o software FEMM
(Finite Element Method Magnetic), que foi desenvolvido pelo engenheiro e membro afiliado
do IEEE, David Meeker. O software em questão retrata de forma satisfatória os fluxos
magnéticos resultantes, levando em consideração os imãs utilizados e os materiais das partes
envolvidas.

UNIFEI – ISEE Trabalho Final de Graduação
65
A simulação foi realizada a partir do desenho confeccionado no software AutoCad,
que pode ser visto na Figura 26.
A partir do desenho, colocou tais dimensões no software FEMM (Finite Element
Method Magnetics), a fim de observar as linhas de fluxo magnético. O resultado obtido pode
ser observado na Figura 28.
Figura 28 – Linhas de fluxo através das coroas do rotor e estator
Fonte: Software FEMM (2017)

UNIFEI – ISEE Trabalho Final de Graduação
66
Como pode ser visto, o yoke calculado atende as necessidades do projeto.
Com o intuito de analisar as densidades de fluxo magnético em cada parte do rotor e
estator, realizou-se a simulação no próprio software. O resultado obtido pode ser encontrado
na Figura 29.
Figura 29 – Densidade de fluxo magnético através de rotor e estator
Fonte: Software FEMM (2017)
Através da simulação pode-se perceber que os valores encontrados estão dentro dos
obtidos por fim de cálculos, portanto as especificações encontradas no projeto atingem o
objetivo proposto, tornando possível uma futura execução do projeto.

UNIFEI – ISEE Trabalho Final de Graduação
67
6 Conclusão
O projeto e desenvolvimento de qualquer máquina devem ser realizados de maneira
direcionada, a fim de atender a problemas predispostos. No caso do problema proposto, o
ideal seria realizar o projeto de um gerador propício para baixas velocidades, atendendo os
requisitos obtidos no início.
Como a intenção do trabalho é mostrar um jeito de se obter energia a partir do
aproveitamento de uma máquina, que muitas vezes é descartada, tornou-se o projeto um tanto
quanto limitado na questão de geração, porém não interfere no resultado procurado.
No que diz respeito à configuração física do gerador, tal característica interfere
diretamente na eficiência deste, não conseguindo uma eficiência alta. A substituição do
enrolamento do estator faz-se indispensável, uma vez que, diminuindo drásticamente a
velocidade de operação do alternador, deve-se compensar aumentando o número de espiras e
o fluxo do rotor, substituindo o enrolamento do rotor por imãs permanentes de terras raras
com alta grade magnética.
A partir de todas as dificuldades encontradas, concluímos a partir da simulação, que o
projeto de um gerador hidrocinético a imãs permanentes atingiu o resultado esperado. Vimos
que o fluxo que circula nas coroas do rotor e estator são maiores que os mínimos esperados
para a geração da tensão necessária, sem que haja a saturação dos núcleos magneticos.
Como proposta para trabalhos futuros, deixamos a confecção física do gerador
hidrocinético, tanto a parte elétrica como a parte mecânica, realizando seu teste em lugar
apropriado e constatanto a viabilidade e acessibilidade do projeto.

UNIFEI – ISEE Trabalho Final de Graduação
68
Referências
BAHAJ, A. S.; MEYERS, L. E. Fundamentals applicable to the utilisation of marine current
turbines for energy production. Renewable Energy, Southampton, Reino Unido, p. 2205–
2211, 2003.
BETZ, A. Wind Energy und ihre Ausnutzung durch Windmuehlen. Universidade de
Michigan: Vandenhoeck, 1926. 64 p.
BRASIL A.C.P.J.; SALOMON L. R. B.; ELS R. V. A New Conception of Hydrokinetic
Turbine for Isolated Communities in Amazon. IV Congresso Nacional de Engenharia
Mecânica, Recife, Brasil, 6 p., 2006.
BRASIL A. C. P., SALOMON L. R. B. A Contribution for the Hydrodynamical Design and
Analysis of Hydrokinetic Axial Turbines. 11 Brazilian Congress of Thermal Sciences and
Engineering- ENCIT, Brasília, Brasil, 10 p., 2006.
BURTON T.; SHARPE D.; JENKINS N.; BOSSANYI E. Wind Energy Handbook. John
Wiley & Sons, LTD., 615 p., 2001.
Como funciona o alternador do carro? E quais são seus principais componentes? Abril de
2011. Disponível em: <http://tunados.net/como-funciona-o-alternador-do-carro-e-quais-sao-
seus-principais-componentes/>. Acesso em: 4 mar. 2017.
COSTA, Rosiano. Alternador automotivo princípios básico de funcionamento. Janeiro de
2016. Disponível em: <http://dicasautomotiva.com.br/alternador-automotivo-principios-
basico-de-funcionamento/>. Acesso em: 4 mar. 2017.
O Brasil na corrida dos ímãs de terras raras. Eletricidade Moderna, n. 212, Aranda Editora, n.
212, nov. 1991.
ELS R.H.V.; CAMPOS C.; HENRIQUES A.M.; BALDUINO L. Hidrokinetic Turbine for
Isolated Villages. X Encontro Latino Americano e do Caribe em Pequenos Aproveitamentos
Hidroenergéticos, Minas Gerais, Brasil, 2 p., 2003.
VÁSQUEZ, F. A. M. Análise de Geradores Síncronos de Imãs Permanentes em Sistemas
Hidrocinéticos. 2014. 120 f. Dissertação (Mestrado em Mecânica) - Universidade de Brasília,
Brasília. 2014.
GIERAS, J. F.; WING, M. Permanent magnet motor technology: design and aplications.
New-York: Marcel Dekker, Inc., 1997, 444 p.
GLOBAL WIND ENERGY COUNCIL. 2015. Disponível em: <
http://www.gwec.net/publications/global-wind-report-2/>. Acesso em 20 de janeiro de 2016.
GORLOV, A. M. The helical turbine: A new idea for low-head hydropower. Hydro Rev. 14,
Boston, EUA, 59 p., 1995.

UNIFEI – ISEE Trabalho Final de Graduação
69
GUERRA, D. R. S.; MESQUITA, A. L. A. Development and testing of small darrieus-type
turbine for tidal current in the mouth of the amazon. 14th Braz. Congress of Mech. Eng., Pará,
Brasil, 1997.
INAGAKI, A.; KANEMOTO, T., YONAYAMA, Y.; MARUYAMA, M. Proposition of
gyro-type hydraulic turbine to coexist with natural ecosystem. Proc. of 22th IAHR Symp.
Hydraulic Machines and Systems, Lausanne, Suíça, 2004.
KANEMOTO, T.; MISUMI, H.; UNO, M.; KASHIWABARA, T.; AKAIKE, S.; NEMOTO,
M. Development of New type hydraulic turbine suitable for shallow stream. 21 Simpósio
IAHR, Lausanne, Suíça, 2002.
KIHO, S.; SHIONO, M.; SUZUKI, K. The power generation from tidal currents by darrieus
turbine. Proc. of World Renewable Energy Conference, California, USA, p. 1242–1245, 1996.
LUCIANO, B. A.; SILVA, S. A. Sobre os ímãs permanentes e suas aplicações na
Eletroeletrônica. Paraíba, 6 p., ago. 2011.
LULA F.A.C.M.; BRASIL A.C.P.J.; SALOMON L.B.R., NOGUERA R.; GUARD P.M.
Experimental Study of a New Design of Hydrokinetic Turbine. IV Congresso nacional de
Engenharia Mecânica, Recife, Brasil, 2006.
MACINTYRE A. Máquinas Motrizes Hidráulicas. Rio de Janeiro: Guanabara Dois S.A.,
1983, 649 p.
MESQUITA, A. L. A.; BLANCO, C. J.; GOUVEIA, M. S. Análisis hidrodinámica de rotores
axiales para uso de energia cinética de los rios. Revista Información Tecnológica del Chile 11,
Chile, 2000.
MESQUITA, A. L. A.; SERRA, C. M. V.; CRUZ, D. O. A. A simplified method for axial-
flow turbomachinery design. Journal of the Brazilian Society of Mechanical Sciences and
Engineering, Rio de Janeiro, p. 61–70, 1999.
MILLER, T. J. E.; HENDERSHOT JR, J. R. Design of brushless permanent-magnet motors.
1. ed. Oxford: Magna Physics Publications, Oxford Science Publications, 1994.
NASCIMENTO M.V.G., VIEIRA L.S.R.; ARAÚJO M.R.O.P.; SÁ A.L.; PINHEIRO C.J.C.;
COSTA S. F.; DOMINGUES P.C.; SADI J.C.; FREIRE A.P.S.; ALMEIDA S.C.A.;
NASCIMENTO J.A.S.; PEDRO, C.W.M.; MORITA M.M. Implantação de Sistemas de
Geração Alternativa na Região Norte. Grupo de Estudo de Produção Térmica e Fontes Não
Convencionais (GPT), Belém, Brasil, 1997.
OLIVEIRA T.F.; SOUZA F.M. Estudo Experimental de um Modelo Reduzido de Turbina
Hidrocinética. Projeto Final, Universidade de Brasília, Brasília, Brasil, 2006.
OVERSHOTT, K. J. Magnetism: it is permanent. IEEE Proceedings-A, Vol.138, No. 1, p. 22-
30, 1991.
PAISH O. Small hydro power: technology and current status. Renewable and Sustainable
Energy Reviews, Colorado, EUA, 2002.

UNIFEI – ISEE Trabalho Final de Graduação
70
PONTA, F.; DUTT, G. S. An improved vertical-axis water-current turbine incorporating a
channelling device. Renewable Energy, 2000.
RODRIGUES, A. P. S. P. Parametrização e simulação numérica da turbina hidrocinética –
Otimização via algoritmos genéricos. 2007. 108f. Dissertação (Mestrado em Mecânica) –
Universidade de Brasília, Brasília. 2007.
SÁVIO W. O. F.; SILVA T. R. M.; PINHEIRO J. R.; BLANCO C. J. C.; VAZ D. A. T. D.
Protótipo hidrocinético para geração de energia elétrica aplicado à educação em engenharia.
SALTER, S. H. Proposal for a large, vertical-axis tidal-stream generator with ringcam
hydraulics. Proc 3rd European Wave Energy Conf, Europa, 1998.
STRNAT, K. J. Modern Permanent Magnets for Applications in Electro-Technology.
Proceedings of the IEEE, vol 78, Nº. 6, pp. 923-946, 1990.
TIAGO-FILHO G.L. The state of art of Hydrokinetic power in Brazil. Inovative small Hydro
Technologies, Buffalo, New York USA, 2003.
UEK. 2005. Disponível em: <http://uekus.com>. Acesso em: 5 fev 2017.

UNIFEI – ISEE Trabalho Final de Graduação
71
Anexo A
Tabela 7 - Propriedades Magnéticas de sinterizados de NdFeB
Grau Remanence Coercivity
normal
Coercivity
Intrínseca
Max. Energy
Produto
Temp
operacion
al
máxima. (
℃)
Br Hcb Hcj (BH) máx
kG (MT) Koe (KA / m) (KA / m) MGOe (KJ/m3)
N-30 10.8-11.2 (1080-1120) ≥ 9,8 ( ≥ 780) ≥ 12,0 ( ≥ 955) 28-30 (223-239) <80
N-33 11.3-11.7 (1130-1170) ≥ 10,5 ( ≥ 836) ≥ 12,0 ( ≥ 955) 31-33 (247-263) <80
N-36 11.8-12.2 (1180-1220) ≥ 11,0 ( ≥ 875) ≥ 12,0 ( ≥ 955) 33-36 (263-286) <80
N-38 12.2-12.6 (1220-1260) ≥ 11,4 ( ≥ 907) ≥ 12,0 ( ≥ 955) 36-38 (286-303) <80
N-40 12.6-12.9 (1260-1290) ≥ 10,5 ( ≥ 836) ≥ 12,0 ( ≥ 955) 38-40 (303-318) <80
N-42 13.0-13.2 (1300-1320) ≥ 11,4 (≥ 907) ≥ 12,0 ( ≥ 955) 41-42 (326-334) <80
N-45 13.3-13.7 (1330-1370) ≥ 11,0 (≥ 876) ≥ 12,0 ( ≥ 955) 43-45 (342-358) <80
N-48 13.8-14.2 (1380-1420) ≥ 10,5 (≥ 835) ≥ 11,0 ( ≥ 876) 46-49 (366-390) <80
N-50 14.1-14.7 (1410-1470) ≥ 10,5 (≥ 835) ≥ 11,0 ( ≥ 876) 48-52 (382-414) <80
30M 10.8-11.2 (1080-1120) ≥ 9,8 (≥ 780) ≥ 14,0 ( ≥ 1114) 28-30 (223-239) <100
33M 11.3-11.7 (1130-1170) ≥ 10,3 (≥ 820) ≥ 14,0 ( ≥ 1114) 31-33 (247-263) <100
35M 11.7-12.1 (1170-1210) ≥ 10,8 (≥ 860) ≥ 14,0 ( ≥ 1114) 33-35 (263-279) <100
38M 12.0-12.4 (1200-1240) ≥ 11,2 (≥ 890) ≥ 14,0 ( ≥ 1114) 36-38 (287-302) <100
40M 12.5-12.9 (1250-1290) ≥ 10,6 (≥ 844) ≥ 14,0 ( ≥ 1114) 38-40 (303-318) <100
42M 13.0-13.2 (1300-1320) ≥ 11,4 (≥ 907) ≥ 14,0 ( ≥ 1114) 40-43 (318-342) <100
45M 13.3-13.7 (1330-1370) ≥ 11,0 (≥ 876) ≥ 14,0 ( ≥ 1114) 43-45 (342-358) <100
48M 13.8-14.4 (1380-1440) ≥ 12,8 (≥ 1019) ≥ 14,0 ( ≥ 1114) 46-50 (366-398) <100
38H 12.2-12.6 (1220-1260) ≥ 11,4 (≥ 907) ≥ 17,0 ( ≥ 1353) 36-38 (286-303) <120
40H 12.6-12.9 (1260-1290) ≥ 11,6 (≥ 923) ≥ 17,0 ( ≥ 1353) 38-40 (303-318) <120
42H 12.8-13.2 (1280-1320) ≥ 12,0 (≥ 955) ≥ 17,0 ( ≥ 1353) 40-43 (318-342) <120
44H 13.3-13.5 (1330-1350) ≥ 11,0 (≥ 876) ≥ 17,0 ( ≥ 1353) 42-44 (334-350) <120
46H 13.6-13.8 (1360-1380) ≥ 11,0 (≥ 876) ≥ 17,0 ( ≥ 1353) 44-46 (350-366) <120
48H 13.8-14.4 (1380-1440) ≥ 12,7 (≥ 1011) ≥ 17,0 ( ≥ 1353) 46-50 (366-398) <120
30SH 10.8-11.3 (1080-1130) ≥ 10,1 (≥ 804) ≥ 20 ( ≥ 1592) 28-31 (223-247) <150
33SH 11.3-11.7 (1130-1170) ≥ 10,5 (≥ 835) ≥ 20 ( ≥ 1592) 31-33 (247-263) <150
35SH 11.8-12.2 (1180-1220) ≥ 11,0 (≥ 875) ≥ 20 ( ≥ 1592) 33-35 (267-279) <150
38SH 12.0-12.4 (1200-1240) ≥ 11,4 (≥ 907) ≥ 20 ( ≥ 1592) 36-38 (287-302) <150
40SH 12.4-12.8 (1240-1280) ≥ 11,8 (≥ 939) ≥ 20 ( ≥ 1592) 38-41 (302-326) <150
42SH 13.0-13.2 (1300-1320) ≥ 12,0 (≥ 955) ≥ 20 ( ≥ 1592) 40-42 (318-334) <150
44SH 13.3-13.9 (1330-1390) ≥ 12,0 (≥ 955) ≥ 20 ( ≥ 1592) 42-46 (334-366) <150
27UH 10.2-10.8 (1020-1080) ≥ 9.3 (≥ 740) ≥ 25 ( ≥ 1990) 25-28 (119-223) <180
30UH 10.8-11.2 (1080-1120) ≥ 10,6 (≥ 844) ≥ 25 (≥ 1990) 28-30 (223-239) <180
32UH 11.2-11.8 (1120-1180) ≥ 10,5 (≥ 834) ≥ 25 (≥ 1990) 30-34 (239-271) <180
34UH 11.5-12.1 (1150-1210) ≥ 10,8 (≥ 860) ≥ 25 (≥ 1990) 32-36 (255-287) <180
36UH 12.1-12.7 (1210-1270) ≥ 11,2 (≥ 892) ≥ 25 (≥ 1990) 34-38 (271-302) <180

UNIFEI – ISEE Trabalho Final de Graduação
72
38UH 12.3-12.9 (1230-1290) ≥ 11,4 (≥ 907) ≥ 25 (≥ 1990) 36-40 (287-315) <180
40UH 12.5-13.1 (1250-1310) ≥ 11,6 (≥ 923) ≥ 25 (≥ 1990) 38-42 (302-334) <180
30EH 10.8-11.2 (1080-1120) ≥ 10,6 (≥ 844) ≥ 27 ( ≥ 2150) 28-30 (223-239) <200
32EH 11.2-11.8 (1120-1180) ≥ 10,5 (≥ 931) ≥ 27 ( ≥ 2150) 30-34 (239-271) <200 Fonte: Grupo Super Imãs