
UNIVERSIDADE SÃO FRANCISCO CURSO DE ENGENHARIA...
53
UNIVERSIDADE SÃO FRANCISCO CURSO DE ENGENHARIA ELÉTRICA PROJETO DE UM BANCO DE CARGAS PARA AVALIAÇÃO DAS CARACTERÍSTICAS DO MOTOR ELÉTRICO Área de Engenharia Elétrica Por Dalvino Leite Filho Geraldo Peres Caixeta, Doutor Orientador Campinas(SP), dezembro de 2010
Transcript of UNIVERSIDADE SÃO FRANCISCO CURSO DE ENGENHARIA...

UNIVERSIDADE SÃO FRANCISCO
CURSO DE ENGENHARIA ELÉTRICA
PROJETO DE UM BANCO DE CARGAS PARA AVALIAÇÃO DAS CARACTERÍSTICAS DO MOTOR ELÉTRICO
Área de Engenharia Elétrica
Por
Dalvino Leite Filho
Geraldo Peres Caixeta, Doutor Orientador
Campinas(SP), dezembro de 2010

ii
UNIVERSIDADE SÃO FRANCISCO
CURSO DE ENGENHARIA ELÉTRICA
PROJETO DE UM BANCO DE CARGAS PARA AVALIAÇÃO DAS CARACTERÍSTICAS DO MOTOR ELÉTRICO
Área de Engenharia Elétrica
Por
Dalvino Leite Filho
Relatório apresentado à Banca Examinadora do Trabalho de Conclusão do Curso de Engenharia Elétrica para análise e aprovação. Orientador: Geraldo Peres Caixeta, Doutor
Campinas (SP), dezembro de 2010

iii
À minha família que sempre me apoiou,
aos professores pelos seus nobres
ensinamentos e aos amigos grandes
companheiros de todas as horas.
iv
SUMÁRIO
LISTA DE FIGURAS .................................. ................................................................vi
LISTA DE TABELAS .................................. ..............................................................vii
LISTA DE EQUAÇÕES ................................. ...........................................................viii
RESUMO.....................................................................................................................ix
ABSTRACT........................................... ......................................................................x
INTRODUÇÃO ..........................................................................................................11
1 A TESE DE REFERÊNCIA............................. ........................................................11
1.1 OBJETIVO DA TESE ...........................................................................................11
1.2 MÉTODO PARA LEVANTAMENTO DA CURVA DE CARGA..............................12
1.3 O MOTOR PADRÃO DE CORRENTE CONTÍNUA............................................. 12
2 O DINAMÔMETRO ............................................................................................... 14
2.1 PRINCÍPIOS DE FUNCIONAMENTO …….......................………………………. 15
2.2 TORQUE DO MOTOR ....................................................................................... 16
2.3 CURVA CARACTERÍSTICA................................................................................ 17
3 CONJUGADO MOTOR E CONJUGADO RESISTENTE........... ........................... 19
3.1 CONJUGADO MOTOR ...................................................................................... 19
3.2 CONJUGADO RESISTENTE.............................................................................. 19
4 BANCO DE CARGAS ................................. .......................................................... 22
4.1 ELEMENTOS DO BANCO DE CARGAS......................................................... 22
4.2 CARGAS – VENTILADORES RADIAS............................................................ 23
4.3 VANTAGENS E DESVANTAGENS DO BANCO DE CARGAS........................23
4.4 RESULTADOS ESPERADOS...........................................................................24
4.5 PERDAS NA MEDIÇÃO COM O BANCO DE CARGAS.................................. 25
4.5.1Perdas no acoplamento da carga........................................................... 25
4.5.2Perdas Joule no motor............................................................................ 26
4.5.3Perdas na medição de rotação................................................................ 27
5 TIPOS DE MOTORES A SEREM ENSAIADOS ............. ..................................... 28
5.1 MOTOR DE CORRENTE CONTÍNUA............................................................. 28
5.1.1 Princípios de funcionamento....................................................................28
5.1.2 Vantagens e Desvantagens para a aplicação do banco de cargas........ 33
5.2 MOTOR DE INDUÇÃO......................................................................................33
5.2.1 Princípios de funcionamento....................................................................33

v
5.2.2 Vantagens e Desvantagens para a aplicação do banco de cargas........ 36
5.3 MOTOR ASSINCRONO................................................................................... 37
5.3.1 Princípios de funcionamento....................................................................37
5.3.2 Vantagens e Desvantagens para a aplicação do banco de cargas........ 38
5.4 MOTOR UNIVERSAL...................................................................................... 39
5.4.1Princípios de funcionamento.....................................................................39
5.4.2 Vantagens e Desvantagens para a aplicação do banco de cargas........ 41
6 RESULTADOS OBTIDOS............................... ........................................................41
6.1 CURVAS DE CORRENTE DO MOTOR PADRÃO........................................... 41
6.2 COMPARATIVO DAS CURVAS DAS CARGAS...............................................44
6.3 TABELAS DAS CARGAS................................................................................. 45
CONCLUSÃO.......................................... ................................................................. 51
CONSIDERAÇÕES FINAIS............................... ....................................................... 51
REFERÊNCIAS BIBLIOGRÁFICAS......................... ................................................ 51
GLOSSARIO.......................................... ................................................................... 52

vi
LISTA DE FIGURAS
Figura 1 – Conjugado motor e corrente elétrica.................................................... 12
Figura 2 – Partes do dinamômetro ....................................................................... 14
Figura 3 - Rotor do freio ....................................................................................... 15
Figura 4 – Sistema de aquisição de dados realimentado ...................................... 16
Figura 5 – Momento de uma força - Torque .......................................................... 17
Figura 6 –Curva característica típica....................................................................... 19
Figura 7 – Conjugado quadrático ............................................................................21
Figura 8 – Conjugado linear ................................................................................... 21
Figura 9 – Conjugado constante............................................................................. 22
Figura 10 – Conjugado inverso .............................................................................. 22
Figura 11 – Componentes do banco de cargas...................................................... 23
Figura 12 – Resultados esperados......................................................................... 25
Figura 13 – Motor de corrente contínua...................................................................28
Figura 14 – Força de Lorentz...................................................................................29
Figura 15 – Fluxo magnético no aço ...................................................................... 31
Figura 16 – Modelo do motor de corrente contínua ............................................... 32
Figura 17 – Curva característica típica do motor de corrente contínua ................. 33
Figura 18 – Motor de Indução ................................................................................ 33
Figura 19 – Esquema elétrico planificado do campo ............................................. 34
Figura 20 – Forma de onda no entreferro ............................................................. 35
Figura 21 – Indução de tensão nos condutores do rotor ....................................... 36
Figura 22 – Curva característica típica do motor de indução................................. 37
Figura 23 – Motor sincrono .................................................................................... 37
Figura 24 – Campo girante ................................................................................... 38
Figura 25 – Curva característica típica do motor sincrono.................................... 39
Figura 26 – Motor universal ................................................................................... 39
Figura 27 – Curva característica típica do motor universal......................................41
Figura 28 – Curva de corrente do motor padrão......................................................43
Figura 29 – Comparativo dos resultados obtidos.....................................................44

vii
LISTA DE EQUAÇÕES
Equação 1 – Conjugado quadrático ..........................................................................20
Equação 2 – Força de Lorentz ................................................................................. 32
Equação 3 – Lei de Faraday .................................................................................... 32
Equação 4 – Equação de corrente por torque do motor padrão............................... 43

viii
LISTA DE TABELAS
Tabela 1 – Tabela das equações das cargas industriais.......................................... 20
Tabela 2 – Tabela das vantagens e desvantagens do banco de cargas.................. 25
Tabela 3 – Tabela corrente por torque medidos do motor padrão............................ 42
Tabela 3 – Tabela do ventilador Grande – Resultados obtidos................................ 46
Tabela 4 – Tabela do ventilador Médio – Resultados obtidos.................................. 48
Tabela 5 – Tabela do ventilador Pequeno – Resultados obtidos.............................. 50

ix
Resumo
Em novos desenvolvimentos de produtos, equipamentos de alto custo para
medições das curvas características dos motores estão envolvidos, tais como o
sistema dinamômetro.
Neste trabalho serão apresentados métodos de levantamento das
características do motor elétrico a partir de cargas aferidas de baixo custo utilizando
técnicas propostas por pesquisadores na área da engenharia.
Este trabalho compõe o projeto da construção de um kit para levantamento da
curva característica de motores elétricos de baixa potência, para aplicações
didáticas ou para indústria de pequeno porte.
Palavras-chave: Máquinas Elétricas, Dinamômetro, Conjugado Resistente.

x
ABSTRACT
In new product development, high cost equipment for measuring the charac-
teristic curves of the motors are involved, as the dynamometer system.
This work presents methods for surveying the characteristics of the electric
motor from measured loads using low cost techniques proposed by researchers
in the field of engineering. Also work is part of the project to build a kit to obtain
the characteristic curve of low power electric motors applications for teaching or
small industry.
Keywords: Electrical Machines, Dynamometer, Conjugate Resistant

11
1-Introdução
Através de equipamentos como fonte de corrente contínua variável e
instrumentos como amperímetro CC, voltímetro CC , tacômetro (ou estroscópio) e de
um motor CC padrão, serão dimensionadas algumas cargas, que são hélices com
pás de comprimento variável a serem acopladas ao eixo do motor, e para estas
cargas deverão ser obtidos, através de ensaios experimentais, as suas respectivas
curvas de conjugado resistente. Com estas cargas aferidas será possível levantar a
curva característica de qualquer motor elétrico de baixa potência encontrados no
mercado, sejam eles, de corrente contínua, de indução (shaded pole) , sincrono, etc.
1.1-Objetivo
A metodologia desenvolvida neste trabalho está baseada na dissertação de
mestrado do curso de engenharia mecânica da Escola Federal de Engenharia de
Itajubá desenvolvida em 1978 pelo Engenheiro Mecânico Paulo Magalhães Filho em
parceria com Laboratório da Arno S/A. Seu objetivo foi o de comparar diversos
rotores axiais de sopro livres existentes no mercado nacional e internacional,
através de ensaios realizados nos bancos de ensaio do Laboratório de Máquinas de
Fluxo da EFEI, além de apresentar um roteiro de cálculo para estes rotores de
pequena vazão, indicando os valores teóricos e obtidos experimentalmente, através
da construção dos modelos projetados e ensaiados e também as modificações
realizadas para chegar aos resultados previstos [1].
1.2-Método de levantamento da curva de carga.
Para medição da potência no eixo, foi usado um motor especial, de modo a ser
possível determinar com relativa precisão o conjugado ou a potência necessária
para manter funcionando a uma determinada rotação deste conjunto. Escolheu-se
então um motor de corrente contínua com imã permanente.

12
Este motor, como se verá ao longo deste trabalho, desenvolve um conjugado
que depende unicamente da corrente elétrica, dentro de certa faixa de rotação.
Desta forma o motor serve ao objetivo de medir o conjugado mecânico fornecido a
um rotor [1].
1.3-O motor elétrico padrão
Para obter a curva das cargas foi necessário utilizar um dispositivo para medir o
torque absorvido por esta carga para cada valor de rotação, sabendo que para o
motor de corrente contínua, a corrente é diretamente proporcional ao torque. O
princípio de funcionamento do motor elétrico de corrente contínua será detalhado
posteriormente no capítulo 5 de acordo com a conhecida “ força de lorentez “ [3].
A figura 1 mostra a relação entre a corrente e o torque para um motor elétrico CC.
Figura 1. Conjugado motor e corrente elétrica. [1]
A corrente elétrica em um motor CC é diretamente proporcional ao seu torque,
devido a isso, usando o programa Excel, é possível obter uma equação Torque x
Corrente que será necessária para o levantamento das curvas de cargas [1].
13
Na tese de referência, devido a inexistência de ferramentas como o Excel, o
autor utilizou os métodos de Cramer para, a partir dos dados medidos de torque e
corrente, calcular esta equação. Abaixo mostramos de forma resumida o método de
Cramer que é utilizado pelo Excel de forma automática. É Observado a evolução da
tecnologia permitindo que com softwares populares, cálculos que a mais de 30 anos
seria necessário um grande trabalho manual por parte dos engenheiros e cientistas
[1]. Ver o desenho mecânico do motor padrão utilizado no anexo 1.
Método de Cramer utilizado:
1-Foram medidos alguns pares de valores “conjugado por corrente contínua” com
rotações variáveis.
2-Concordar estes pontos por uma reta, que foi conseguido através do método dos
mínimos quadrados ou método de Cramer.
3-Obtenção da tabela onde X é correspondente a variável independente (corrente) e
Y à variável dependente (conjugado).
4-Com os coeficientes S0, S1, S2, S3, S4, temos o sistema que resolvendo por
CRAMER, resulta em matrizes:
S0A0 + S1A1 = S3
S1A0 + S2A1 = S4
Substituindo os coeficientes
A0 = K1
A1 = K2 ou
C[g.cm] = -K1 + k2 * I[A]
Esta relação foi traçada graficamente e a partir da equação obtém-se qualquer
ponto de conjugado para cada valor de corrente medido para o motor padrão [1].
2-O dinamômetro
Os sistemas de teste de motor são utilizados por laboratórios de ensaio, estações
de inspeção e em departamentos de fabricação dos principais fabricantes de
motores. O sistema dinamômetro é utilizado exclusivamente para teste de circuito
fechado de motores miniaturizados. O aspecto de um sistema dinamômetro e seus
componentes é mostrado na figura 2.

14
Figura 2. Partes do dinamômetro. [9]

15
2.1-Princípio de funcionamento
Figura 3. Rotor do freio. [9]
O Dinamômetro de histerese absorve potência com um único sistema de freio a
histerese que fornece carregando de torque de fricção independentemente da
velocidade do eixo.
O freio a histerese fornece torque por se utilizar de dois componentes básicos-
um pólo estruturado reticuladamente e um aço especial do rotor/montado no eixo-
encaixados mas sem contato físico. Até que a estrutura do pólo seja enegizada, a
taça de arraste pode girar livremente com o eixo e com os rolamentos conforme
mostrado na figura 3.
Quando uma força magnetizante da bobina de campo é aplicado à estrutura do
pólo, a lacuna do ar torna-se um campo de fluxo e o rotor é magneticamente contido
proporcionando uma ação de frenagem entre a estrutura do pólo e do rotor.
Através de aquisições dos dados elétricos fornecidos ao sistema são calculados
os valores de torque absorvido pelo motor.
.
Medição de velocidade
O dinamômetro contém uma fibra óptica reflexiva. Cada slot do rotor que passa
pelo sensoriamento da fibra óptica gera um pulso eletrônico, é então convertido em
uma leitura de velocidade em rotações por minuto (rpm).

16
Medição de torque
Um freio de histerese é usado para desenvolver uma resistência à rotação de um
eixo mecânico. A força de torção é produzida pelo teste do motor e aplicada ao
conjunto rotor-eixo do freio onde o torque de reação será medido pelo ângulo do
freio com sua montagem em pêndulo e que é interpretado pelo software do sistema.
O diagrama do sistema de aquisição de dados realimentado é mostrado na figura
4.
Figura 4. Sistema de aquisição de dados realimentado. [9]
O software calcula o desempenho do motor e suas características empregando
estes testes que são configuráveis pelo usuário.
Os dados gerados podem ser armazenados, expostos ou impressos em formato
de tabela ou gráfico, e é facilmente importado para uma planilha [9].
2.2-Conjugado ou Torque
O conjugado, também chamado de torque, momento ou binário é a medida do
esforço necessário para girar um eixo.
Para mover um peso por um processo semelhante à figura 5, a força “F” que será
necessária aplicar à manivela depende do comprimento “L” do braço. Quanto maior
for o braço, menor será a força necessária.

17
Se dobrar a medida do braço, a força F necessária será reduzida à metade.
Para medir o torque necessário para girar o eixo não basta definir a força
empregada, é preciso também observar a que distância do eixo a força é aplicada.
Esta grandeza é medida pelo conjugado, que é o produto da força pela distância.
Figura 5. Momento de uma força – Torque. [7]
2.3- Curvas Características – Parâmetros medidos e calculados
Rotação
É a quantidade de revoluções que o eixo desenvolve por minuto.
Corrente Elétrica
É a quantidade de carga que atravessa a seção de uma superfície em um se-
gundo (C/s).
Ou seja, o movimento de cargas orientadas em um determinado sentido, provo-
voca o efeito conhecido como corrente elétrica (i), e é dado pela variação de carga
por unidade de tempo.
Nos condutores metálicos, as cargas são provocadas pelo deslocamento de
elétrons.
Conjugado

18
O conjugado do motor assume valores bastante diferentes na fase de partida. O
conjugado médio obtém-se a partir da diferença entre o conjugado do motor e o
conjugado resistente da carga.
Conjugado nominal necessário para mover a carga em condições de
funcionamento à velocidade específica.
O conjugado requerido para funcionamento normal de uma máquina pode ser
constante ou varia entre amplos limites. Para conjugados variáveis, o conjugado
máximo deve ser suficiente para suportar picos momentâneos de carga.
Potência mecânica
A potência exprime a rapidez com que esta energia é aplicada e se calcula
dividindo a energia ou trabalho total pelo tempo gasto em realizá-lo.
A unidade mais usual para medida de potência mecânica é o cv (cavalovapor),
equivalente a 736W. Então as potências dos dois motores acima.
Potência elétrica
Um motor elétrico absorve energia elétrica da rede e a transforma em energia
mecânica disponível na ponta do eixo.
Rendimento
O motor elétrico absorve energia elétrica da linha e a transforma em energia
mecânica disponível no eixo. O rendimento define a eficiência com que é feita esta
transformação.
Chamando “Potência útil” Pu a potência mecânica disponível no eixo e “Potência
absorvida” Pa a potência elétrica que o motor retira da rede, o rendimento será a
relação entre as duas. [11]

19
Figura 6. Curva característica típica.
Fonte: Material interno laboratório.
3-Conjugado Motor e Conjugado Resistente (Carga)
3.1-Conjudago Motor
No caso de qualquer motor, o torque de partida deve ser maior do que o torque
resistente acoplado ao eixo. Após um certo tempo que o motor partiu, na velocidade
nominal, há o encontro das curvas de Torque do motor e do torque resistente.
Quando a carga mecânica acoplada ao eixo varia por algum motivo, o torque
motor também varia, e conseqüentemente a velocidade de rotação do motor varia
juntamente. Por exemplo, se a carga mecânica diminui, o torque do motor também
diminui e a velocidade aumenta, entrando em um novo regime. [4]

20
3.2-Conjugado resistente
Existem diversos tipos de cargas que podem ser acopladas ao motor nas
aplicações em geral, sejam industriais, automotivas, eletro-domésticos, brinquedos,
ferramentas, etc. [4]
As cargas utilizadas neste trabalho, que são ventiladores axiais, possuem curvas
modeladas por funções quadráticas conforme equação 1 [4] [10].
(1)
Outros tipos de cargas são comuns na indústria e suas funções estão
relacionadas na tabela 1.
Tabela 1 – Equações das cargas industriais. [10]
À medida que aumenta a velocidade, as cargas quadráticas oferecem um maior
conjugado de carga ao motor. Quando o conjugado de carga somado ao conjugado
de perdas (por exemplo, atrito e ventilação) se iguala ao conjugado fornecido pelo
motor, conjugado eletromagnético, o motor entra em regime permanente [10].
As figuras 7 a 10 representam as curvas típicas de cada tipo de carga industrial
[10].
O conjugado quadrático
Exemplos: Bombas centrífugas, Ventiladores axiais.

21
Figura 7. Conjugado quadrático. [10]
O conjugado linear
Exemplos: Sistemas de acoplamentos hidráulico ou eletromagnético.
Figura 8. Conjugado linear. [10]
O conjugado constante
Exemplo: Ponte rolante, Guinchos.

22
Figura 9. Conjugado constante. [10]
O conjugado inverso
Exemplos: Bobinador, Maquinas de sonda e perfuração de petróleo.
Figura 10. Conjugado inverso. [10]
4- Banco de cargas
4.1- Elementos do banco de cargas
-Fonte de alimentação
-Motor a ser ensaiado
-Cargas aferidas e as tabelas de conjugado
-Estroboscópio
Os elementos do banco de cargas estão apresentados na figura 11.
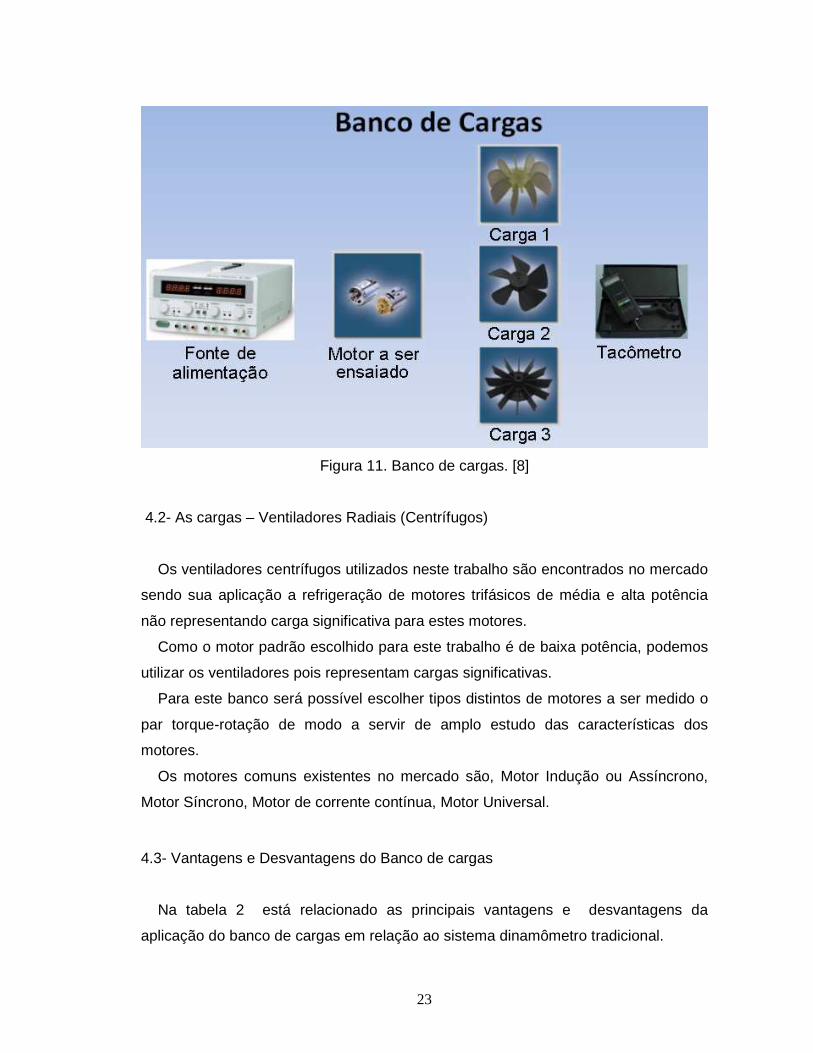
23
Figura 11. Banco de cargas. [8]
4.2- As cargas – Ventiladores Radiais (Centrífugos)
Os ventiladores centrífugos utilizados neste trabalho são encontrados no mercado
sendo sua aplicação a refrigeração de motores trifásicos de média e alta potência
não representando carga significativa para estes motores.
Como o motor padrão escolhido para este trabalho é de baixa potência, podemos
utilizar os ventiladores pois representam cargas significativas.
Para este banco será possível escolher tipos distintos de motores a ser medido o
par torque-rotação de modo a servir de amplo estudo das características dos
motores.
Os motores comuns existentes no mercado são, Motor Indução ou Assíncrono,
Motor Síncrono, Motor de corrente contínua, Motor Universal.
4.3- Vantagens e Desvantagens do Banco de cargas
Na tabela 2 está relacionado as principais vantagens e desvantagens da
aplicação do banco de cargas em relação ao sistema dinamômetro tradicional.
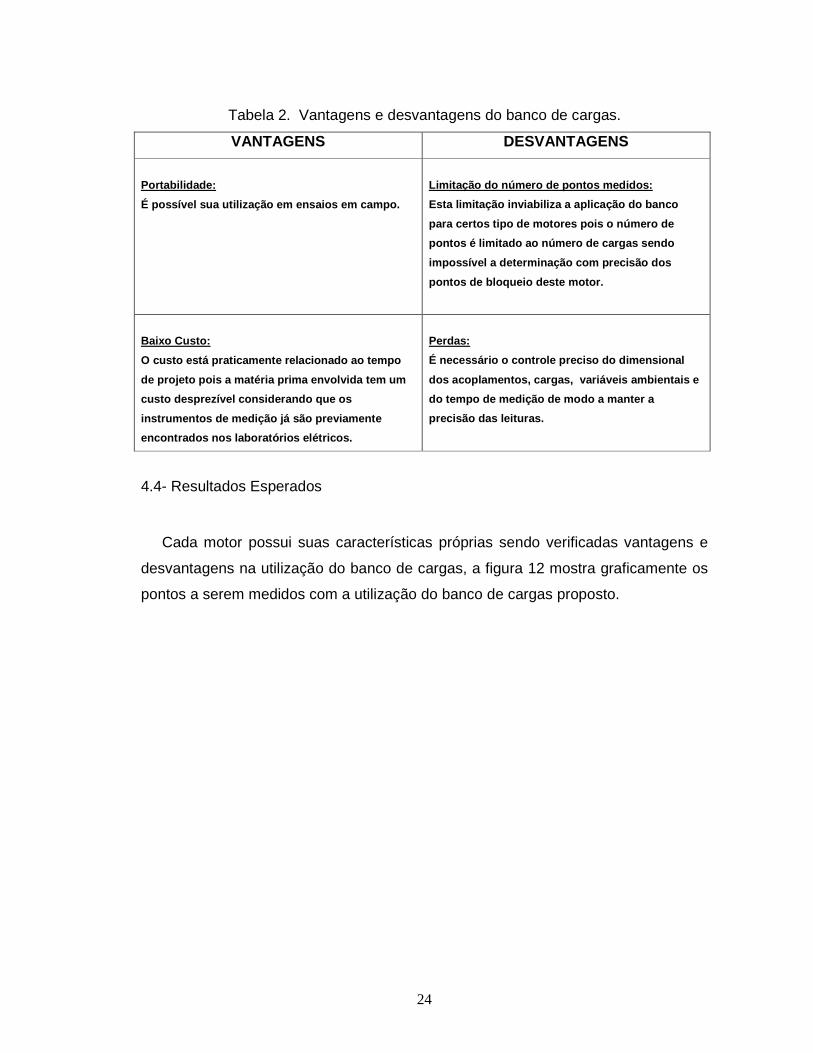
24
Tabela 2. Vantagens e desvantagens do banco de cargas.
VANTAGENS DESVANTAGENS
Portabilidade:
É possível sua utilização em ensaios em campo.
Limitação do número de pontos medidos:
Esta limitação inviabiliza a aplicação do banco
para certos tipo de motores pois o número de
pontos é limitado ao número de cargas sendo
impossível a determinação com precisão dos
pontos de bloqueio deste motor.
Baixo Custo:
O custo está praticamente relacionado ao tempo
de projeto pois a matéria prima envolvida tem um
custo desprezível considerando que os
instrumentos de medição já são previamente
encontrados nos laboratórios elétricos.
Perdas:
É necessário o controle preciso do dimensional
dos acoplamentos, cargas, variáveis ambientais e
do tempo de medição de modo a manter a
precisão das leituras.
4.4- Resultados Esperados
Cada motor possui suas características próprias sendo verificadas vantagens e
desvantagens na utilização do banco de cargas, a figura 12 mostra graficamente os
pontos a serem medidos com a utilização do banco de cargas proposto.

25
Figura 12. Medições com o banco de cargas. [12]
4.5- Perdas na medição com o banco de cargas
4.5.1-Perdas no acoplamento por vibração
A vibração é uma energia física, que quando dissipada apresenta um fenômeno
de oscilações, em forma de movimento vibratório. Em um sentido geral é um
movimento periódico,isto é, que se repete após um certo intervalo de tempo, tal
intervalo é chamado de “período de vibração”.
A vibração, portanto, é um fenômeno onde o estado de um sistema varia
periodicamente em função do tempo, no geral, ou na prática encontramos
movimentos vibratórios muito complexos e de difícil mensuração, com vários
componentes aleatórios inclusive exigindo um conhecimento apurado deste
tema,bem como do equipamento ou sistema que o fenômeno interage.
No caso deste trabalho tem-se interesse em qualificar as perdas por possíveis
vibrações, geradas por desbalanceamento em acoplamentos de um sistema

26
relativamente simples tal qual de ventiladores montados no eixo de um motor
elétrico.
Muitas são as causas que originam vibrações nas máquinas rotativas, tais como:
desbalanceamento, deformidade, etc [6]. Em equipamentos mecânicos rotativos, os
fatores que determinam o fenômeno são de natureza inercial, desequilíbrios,
elásticos, atrito, aerodinâmicos, freqüências críticas, forças magnéticas, etc.
O desbalanceamentos é uma causa mais comum de origem de vibrações em
máquinas rotativas.
O desbalanceamento é originado pela distribuição de massas, ou resultante dos
momentos de massa. Além desta razão clássica, é muito comum, os rotores
apresentarem momentos resultantes (desbalanceamentos) motivados por erro de
centralização do cubo do acoplamento em relação ao eixo do motor. Estes “erros de
centralização” acontecem por folgas excessivas oriundas de desgaste natural de uso
ou defeito de fabricação do acoplamentodos ventiladores.
A excentricidade é originada no eixo do motor em relação ao ventilador, ou a
soma dos dois. Neste caso será necessário, o conjunto passar por um processo de
correção dos desequilíbrios que serão determinados em uma segunda fase deste
projeto.
A deformidade é uma anormalidade de conformação das forças radiais e laterais
do ventilador. O ventilador estando montado no eixo do motor pode apresentar um
lado ou um segmento mais maleável que o outro, ou seja, a deformidade varia ao
longo de um giro deste uma vez que o material plástico deste pode apresentar
defeito.
Então será necessário adquirir um novo ventilador no mercado, respeitando sua
geometria que deverá ser perfeitamente igual ao original, para que sua curva de
carga mantenha inalterada, ou até mesmo adquiri um novo ventilador com geometria
distinta levantar sua curva de carga utilizando-se o motor padrão.
O desalinhamento, é referente a uma eixo não alinhado, causa que provoca
valores elevados de níveis vibratórios com incidência no sentido axial em relação ao
eixo, causando arrastos e forças laterais, às freqüências de maior amplitude que
apresentam na rotação de trabalho produzindo vibrações.
27
4.5.2- Perdas joule nos enrolamentos do motor
Muitas vezes, o tempo de funcionamento do motor elétrico, que é solicitado a
diferentes potências durante diferentes intervalos de tempo podem representar
aquecimentos também em diferentes níveis.
As perdas em motores elétricos ocorrem ocasionando o aquecimento das
diversas partes da máquina. Para assegurar adequada operação da máquina, o
aquecimento de cada uma de suas partes necessita ser mantido o tempo de
funcionamento o mínimo possível e as leituras devem então serem realizadas logo
após o funcionamento do motor iniciar-se de modo a obter os dados de rotação sem
estas influências, ou seja, de uma forma sistemática.
Outros fatores que devem ser registrados de modo a controlar possíveis
distorções nas medições são: A primeira, a temperatura do meio refrigerante no
caso de motores que trocam calor com o ar ambiente; a segunda, como está
relacionada com a densidade do ar, impõe condições à eficiência da dissipação, a
terceira esta relacionada a altitude.
À medida que os motores têm que operar a altitudes maiores, o decréscimo na
densidade do ar leva a uma dissipação de calor inferior àquela verificada ao nível do
mar; praticamente, na faixa de 0 a 1000m de altitude assume-se a dissipação
constante, para uma dada temperatura ambiente.
Deve-se portanto, ter em mente que motores operando em ambientes de mesma
temperatura, mas de altitudes diferentes, desde que ambas sejam acima de 1000m,
ou pelo menos uma delas, devem ter sobrelevações diferentes, isto é, aquele
instalado à maior altitude deve ser solicitado a uma potência menor aquecendo mais
e distorcendo os dados de performance [11].
4.5.3- Perdas por medição com tacômetro de contato mecânico
A escolha do instrumento é realizada conforme as condições de operação e a
exatidão desejada do sistema.
Os tacômetros de corrente contínua acoplados ao motor são uma opção para a
aquisição deste dado. Estes tacômetros são excitados através de imãs permanentes
e fornecem uma tensão contínua que é proporcional a velocidade. O sinal fornecido

28
muda sua polaridade para a inversão do sentido de rotação. Obtém-se desta forma a
polaridade correta do valor atual da velocidade para cada inversão da mesma.
A desvantagem deste sistema de medição consiste em ser necessário acoplar
mecânicamente o instrumento ao motor o que pode levar a perdas por vibração ou
pré-carga ao motor.
Ausência de perdas por medição com estroboscópio ou tacômetro óptico:
O estroboscópio gera um luz em uma frequência tal que deverá ser sincronizada
ao valor de rotações por minuto do motor proporcionando uma ilusão de de parada
do movimento, assim é possível ler o valor da rotação sem contato com o motor.
A vantagem deste sistema de medição consiste em ser obtido os valores de
rotação sem contato mecânico e devido a isso as perdas serão nulas.
A desvantagem está na necessidade de ter um operador para manipulação do
equipamento. Para o tacômetro óptico a mesma vantagem é verificada devido ao
seu funcionamento também ser baseado reflexão luminosa, ou seja, sem perdas
mecânicas.
5-Tipos de motores elétrico
A seguir faremos uma análise dos princípios de funcionamento de cada tipo de
motor a ser ensaiado.
5.1- Motor de corrente contínua
O Aspecto do motor de corrente contínua é mostrado na figura 13.
Figura 13. Motor de corrente contínua. [8]

29
5.1.1- Princípios de funcionamento.
Em um fio condutor percorrido por uma corrente elétrica I, imerso em um
campo magnético B, existirá uma força magnética F perpendicular a sua extenção
[3] [7].
Vide figura 14, o esquema relacionado a definição acima onde o fio condutor,
sofre uma força magnética por ser percorrido por uma corrente elétrica e estar
imerso em um campo magnético.
Figura 14. Força de Lorentz. [7]
È importante verificar que nesta relação o inverso também é possível, ou seja,
em um condutor que se encontra em movimento porém está imerso em um campo
magnético B, existirá uma corrente elétrica I. Para esta situação tem-se o conceito
básico de funcionamento de um gerador elétrico onde se transforma energia
mecânica em elétrica.
No motor de corrente contínua tem-se, o campo constante, ou seja,
constituído por pólos magnéticos (norte e sul) constante e devido a isto podem ser
construídos com imãs permanentes, fixos na carcaça metálica denominada de
estator. Como o próprio nome revela, o estator é fixo, estático e está na região
externa do motor, envolvendo o rotor que é a parte girante e tem o eixo como seu
suporte e transmissor de torque.
Os fios condutores estão localizados em fendas do pacote de lâminas
metálicas constituindo bobinas e distribuídas de forma a desenvolver conjugado
quando alimentadas por fonte externa. Os fios são esmaltados sendo isolados

30
eletricamente uns dos outros nas bobinas e também dos pacotes de lâminas do
rotor.
O comutador é o elemento responsável pelo contato elétrico deste conjunto
girante com a alimentação do circuito elétrico, isto se realiza devido suas lãminas
estarem em contato tanto com as escovas de carvão(estáticas) ligadas a fonte
externa.
As relações entre os sentidos da corrente e as forças geradas são
teoricamente constantes para cada instante do movimento do rotor salvo distorções
demonstradas a seguir.
As escovas (estáticas) sempre alimentarão as bobinas em seqüência
ajustando os sentidos das correntes independente da velocidade de rotação
constituindo assim um sistema de forças fixo.
O bobinamento do rotor é realizado seguindo uma lógica de geometria
tridimensional com a finalidade de organizar e tornar perfeitas as relações dos
sentidos instantâneos de corrente produzindo vetores força magnética coerentes no
espaço em relação ao momento força resultante no eixo do motor.
A construção mecânica do motor CC é composta pelo rotor, também
denominado de armadura que é o eixo que suporta o pacote de chapas que
compõem a armadura. O enrolamento, que são bobinas de fios condutores estão
colocado em ranhuras distribuídas uniformemente na superfície da armadura. As
pontas dos enrolamentos estão ligadas às lamelas do comutador. A corrente é
levada ao enrolamento através de escovas de carvão em contato com o comutador.
O Estator é composto dos elementos necessários à forma-ção do circuíto
magnético, chapas do estator (carcaça) e polos.
Os polos suportam o enrolamento de excitação (neste caso alimentado por
fonte externa) ou o imã permanente.
A corrente contínua no enrolamento de campo ou o próprio imã permanente
produz um campo magnético ‘B’, ou seja, um fluxo magnético φ , cujo circuíto
magnético se fecha através dos polos principais, da carcaça do estator e da
armadura conforme figura 15 [3] [7].

31
Figura 15. Fluxo magnético no aço. [12]
O fluxo é proporcional a indução magnética B e a seção F do circuíto
magnético.
Para o circuíto magnético do motor, que não deve ser saturado o
comportamento do fluxo é linear em relação a corrente.
Conforme verifica-se na figura 16, de forma esquemática, a haste móvel
representa o rotor onde temos condutores em movimento livre e o campo B
representa o estator com seus enrolamentos de campo ou imã permanente.
Verificamos que Vb alimenta o circuíto com corrente, sendo que está corrente está
sob ação do campo B na região da haste.
A Força magnética é gerada segundo a Lei de Lorentz, conforme equação
02, e a haste acelera para a direita.
A haste adquire velocidade V e sob ação do campo B surge a tensão induzida
nos terminais da haste. A velocidade V continua aumentando até que Eind = Vb.
Neste momento temos V constatnte, ou seja, temos uma analogia com o motor em
vazio I = 0A.
A máquina continua nesta condição até que sofra alguma alteração em um
dos seus parâmetros.
Aplicando uma força externa para a esquerda a haste sofre um desaceleração
e Eind diminui. Surge novamente a corrente I e a fonte Vb fornece mais energia a
máquina.

32
No esquema mostrado na figura 16 pode-se observar que uma carga
constante, desenvolvendo uma velocidade constante, absorve do motor uma
corrente elétrica específica e se a carga for modificada o comportamento da corrente
terá uma variação linear [7].
Figura 16. Modelo do motor de corrente contínua. [7]
A equação 2 relaciona o produto vetorial da corrente elétrica (i.dL) pelo campo
magnético (B) produzindo a força magnética (F).
(2)
A equação 3 relaciona o produto vetorial da velocidade desenvolvida pelos
condutores (v) pelo campo magnético (B) produzindo a tensão induzida nos
condutores (e).
(3)

33
5.1.2- Vantagens para aplicação do banco de cargas
Verifica-se ser uma reta, ou seja, favorável a utilização do banco de cargas pois
torna-se viável a extrapolação da curvas com apenas alguns pontos.
O aspecto da curva do motor CC está mostrada na figura 17.
Figura 17. Curva característica típica do motor de corrente contínua.
Fonte: Material interno laboratório.
5.2- Motor Indução (Assíncrono)
O aspecto do motor indução monofásico a ser ensaiado está mostrado na
figura 18.
Figura 18. Motor de Indução. [8]
34
5.2.1- Princípios de funcionamento
Este motor é largamente utilizado em aplicações industriais, em eletrodomésticos
e ferramenta devido seu baixo custo e simplicidade de fabricação.
Para este trabalho será realizada uma breve análise de motor com foco no que diz
respeito a sua curva torque-rotação e quais as vantagens e desvantagens na
aplicação do banco de cargas sem aprofundar em aspectos complexos inerentes
aos modelos matemáticos envolvidos.
O motor indução possui um estator onde estão dispostos os enrolamento de
campo responsáveis pela produção de campo girantes que influenciará os
erolamento do rotor produzindo forças magnéticas e o torque.
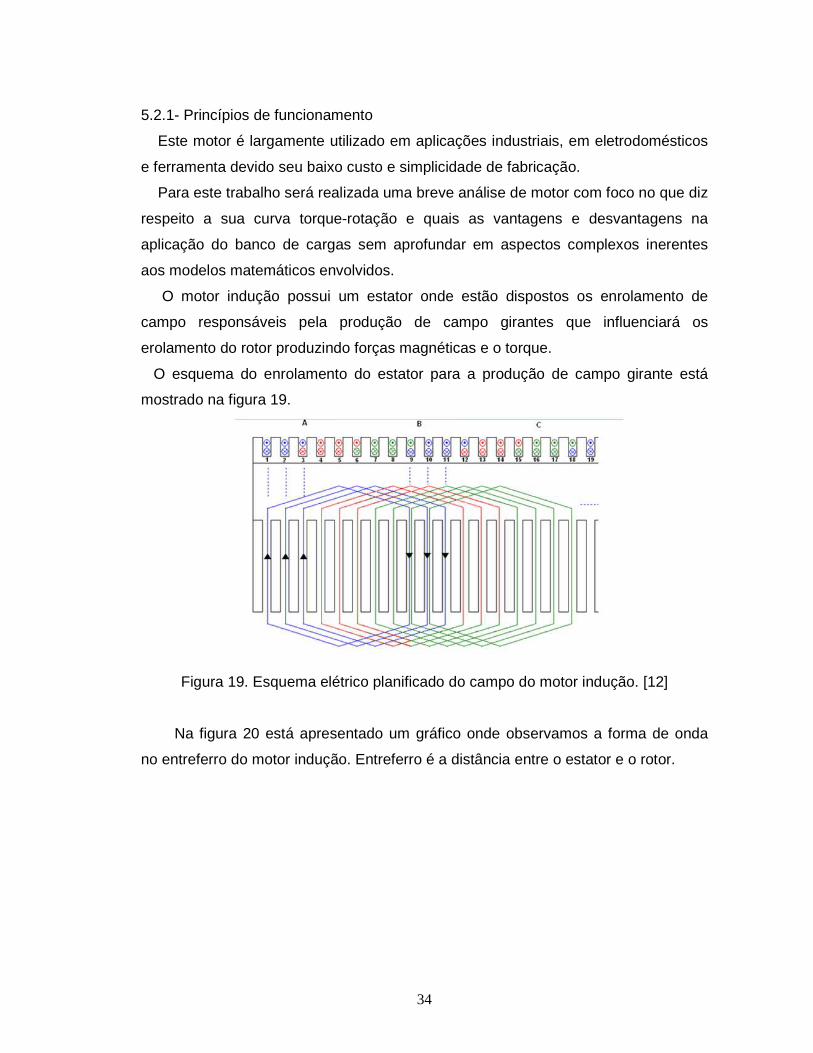
O esquema do enrolamento do estator para a produção de campo girante está
mostrado na figura 19.
Figura 19. Esquema elétrico planificado do campo do motor indução. [12]
Na figura 20 está apresentado um gráfico onde observamos a forma de onda
no entreferro do motor indução. Entreferro é a distância entre o estator e o rotor.

35
Figura 20. Forma de onda no entreferro. [7]
O rotor do motor indução tem seu núcleo laminado e pode ser bobinado ou do
tipo gaiola de esquilo sendo o princípio de funcionamento idêntico variando apenas
aplicações para controle de velocidade. O rotor possui então orifícios no sentido
axial para o alojamento de condutores conectados em curto circuíto por anéis ( ou
fios condutores ) externos a região do campo.
O funcionamento deste motor baseia-se na interação entre campos magnéticos
desenvolvidos pelos enrolamentos do estator e do rotor [3].
Força magnetomotriz dos enrolamentos de armadura.
A corrente que atravessa as N espiras das bobinas, que estão posicionadas
defasadas mecânicamente na armadura, obtem-se no entreferro uma onda
aproximadamente senoidal conforme as figuras 20 e 21, para esta análise é
interessante obter o desenho planificado do estator conforme figura 19 [3].
Esta onda senoidal permeia os enrolamentos do rotor e induzem correntes em seus
condutores [3], ver a figura 20.

36
Figura 21. Indução de tensão nos condutores do rotor. [10]
A onda de FMM avança sobre os condutores do rotor e desse modo tensões
são induzidas nas espiras curtocircuitadas do rotor.
As correntes induzidas nessas espiras interagem com o campo no entreferro
produzindo conjugado, que se mantém desde que existam campos magnéticos
girantes (em movimento) e as correntes no rotor.
Consequentemente o motor parte girando a uma velocidade menor que a
velocidade sincrona na direção do campo girante [3].
Escorregamento:
Em um motor indução o rotor não desenvolverá uma velocidade sincronizada
com a velocidade do campo girante e devido a isso é chamado de motor assíncrono.
Analisando o seu funcionamento no espaço observa-se que o rotor em
velocidade síncrona desenvolverá torque nulo e devido a isso sua velocidade será
nulo, logo sempre existirá um escorregamento que é a diferença entre a velocidade
do campo girante e do rotor.
Por outro lado, quando aplicado a seu eixo uma carga o torque é aumentado
bruscamente com a queda de rotação conforme pode-se observar em sua curva
característica típica na figura 22.
Verifica-se que para uma rotação específica a interação magnética se desfaz
colocando o motor em uma região de instabilidade (ponto de bloqueio). O motor de
indução tem conjugado igual a zero à velocidade síncrona [3].

37
5.2.2- Desvantagem da aplicação do banco de cargas para o motor indução
Será possível medir através do banco de cargas alguns pontos da curva em sua
região estável, porém verificamos a desvantagem de não ser possível a medição
exata do ponto de bloqueio, um ponto importante, devido ao número limitado de
cargas.
O aspecto da curva característica do motor indução está mostrado na figura 22.
Figura 22. Curva característica típica do motor de indução.
Fonte: Material interno laboratório.
5.3- Motor Síncrono
O aspecto do motor síncrono a ser ensaiado está mostrado na figura 23.
Figura 23. Motor síncrono. [8]

38
5.3.1- Princípios de funcionamento
Nas máquinas síncronas o enrolamento de campo produz um campo girante
semelhante ao motor indução conforme mostrado na figura 24 [3].
Figura 24. Campo girante. [7]
O rotor deste tipo de motor é constituído por um imã permanente ou bobinas
alimentadas em corrente contínua mediante anéis coletores, e são responsáveis
pela produção de campo magnético que será movido devido a ação do campo.
A interação entre o campo e o rotor ocorre sem dafasagem, dentro do limite da
máquina, estável em uma faixa de torque especificada [3].
As principais características de motores síncronos são:
-Mantém a velocidade constante da operação em vazio até a plena carga,
-Podem alcaçar altas velocidades,
-Alto torque de partida.
5.3.2- Desvantagem da aplicação do banco de cargas para o motor sincrono
Será viável medir, através do banco de cargas alguns pontos da curva em sua
região estável, porém verifica-se a desvantagem de não ser possível a medição
exata do ponto de bloqueio, um ponto importante, devido ao número limitado de
cargas.

39
Na figura 25 tem-se a curva característica típica do motor síncrono onde
observa-se a rotação constante em uma faixa de torque até seu bloqueio.
Figura 25. Curva característica típica do motor síncrono. [12]
5.4- Motor Universal
O aspecto do motor universal a ser ensaiado está mostrado na figura 26.
Figura 26. Motor universal. [8]
Características principais do motor universal:
-Torque de partida do motor universal muito superior,
-Melhor Relação Rotação x Torque,

40
-Menor consumo de energia,
-Quando o eixo opera em baixa rotação a potência aumenta,
-Não ocorrência do bloqueio.
5.4.1- Princípios de funcionamento
Um motor universal é um motor com enrolamento série previsto para funcionar,
aproximadamente com a mesma velocidade e igual potência alimentado tanto em
corrente contínua quanto em corrente alternada, monofásica de freqüência não
superior a 60Hz e aproximadamente a mesma tensão eficaz.
O motor universal está caracterizado por sua adaptação a redes de tensão
alternada e também a fontes de tensão contínua.
Desenvolve a maior relação potência por peso se comparando a outros tipos de
motores de corrente alternada e principalmente tem vantagens no que diz respeito a
alta velocidade. Esses motores são bobinados em série e possuem características
de tais enrolamentos tanto para alimentação alternada como para contínua, salvo
quando são empregados reguladores ou outros meios para controle de velocidade.
Em vazio sua velocidade é elevada e em alguns casos podem superar
30000rpm e portanto seus rotores, são preparados para suportar as forças
centrífugas.
Para o estudo dos motores universais é importante anteriormente o
entendimento dos fenômenos elétricos envolvidos e também o estudo do motor de
corrente contínua (ou DC) uma vez que sua arquitetura e funcionamento são
semelhantes.
Campo em série com a armadura.
A corrente de campo do motor universal, neste caso, é a própria corrente de
carga, de modo que o fluxo de entreferro e, portanto, a tensão varia bastante com a
carga.
Como o enrolamento de campo deve suportar toda a corrente da armadura, é
construído com poucas espiras de fio grosso. Como o torque é proporcional ao fluxo
magnético, e este por sua vez é proporcional à corrente de campo.
O torque apresenta uma relação exponencial com a corrente de armadura.
Devido a esta característica este motor é utilizado para acionar trens elétricos,

41
metrôs, elevadores, ônibus e automóveis elétricos, eletrodomésticos, ferramentas,
dentre outros. [5]
A arquitetura do motor universal é muito semelhante a do motor DC
principalmente no que se refere ao rotor, sendo necessário que seu estator seja
bobinado com fios condutores para alimentação AC ao invés de imãs permanentes.
Quando este motor é alimentado com uma fonte de corrente alternada as
intensidades de campo do rotor e do estator (ligadas em série) oscilam exatamente
ao mesmo tempo (em fase) e portanto o funcionamento é realizado, pois ambas
mantém entre si as relações magnéticas necessárias para o desenvolvimento do
torque. [5]
5.4.2- Vantagens da aplicação do banco de cargas
Verifica-se uma envergadura bem definida, favorável a utilização do banco de
cargas proposto neste trabalho pois torna-se viável a extrapolação da curva com
apenas alguns pontos.
O aspecto da curva típica do motor universal está mostrado na figura 27.
Figura 27. Curva característica típica do motor universal. [12]

42
6-Resultados obtidos
6.1-Curva de corrente do motor padrão
Foram obtidas curvas características do motor padrão, ver tabela 3, com a
utilização do dinamômetro marca Magtrol em Laboratório de Engenharia da empresa
AMETEK do Brasil Ltda, em tensões distintas e com isto foi observado que a curva
de corrente não sofre influência da alimentação.
Conclui-se que para o motor de corrente contínua o torque está relacionado
apenas a corrente elétrica absorvida pelo motor como verificado anteriormente na
literatura.
Tabela 3. Curva de corrente do motor padrão.
Na figura 28 observamos graficamente as curvas obtidas em ensaios com tensões
de alimentação distintas.

43
Figura 28. Curva de corrente do motor padrão.
A equação abaixo foi calculada pelo programa EXCEL a partir dos resultados
obtidos no levantamento da curva de corrente do motor padrão.
(4)
6.2- Comparativo das curvas de carga
As curvas de rotação por torque de cada carga, foram levantadas a partir da
variação da corrente elétrica absorvida pelo motor padrão, acoplado a carga,

44
utilizando a equação 4 e medindo a rotação em cada ponto.
Figura 29. Comparativo dos resultados obtidos.
Por fim foram produzidas tabelas para cada uma das cargas, sejam elas
denominadas, pequena, média e grande sendo estas tabelas, em conjunto com as
próprias cargas, componentes principais do banco de cargas proposto neste
trabalho, para a utilização na avaliação das características de motores elétricos.
Ver as tabelas de 4 a 6 mostradas a seguir.

45
6.3- Tabelas das cargas
Tabela 4. Tabela do ventilador grande.

46
Tabela 4. Tabela do ventilador grande (continuação).

47
Tabela 5. Tabela do ventilador médio.

48
Tabela 5. Tabela do ventilador médio (continuação).

49
Tabela 6. Tabela do ventilador pequeno.

50
Tabela 6. Tabela do ventilador pequeno (continuação).

51
Conclusão
Com a realização deste trabalho foi possível analisar aspectos
relacionados ao dimensionamento de motores elétricos, bem como tratamentos
relacionados ao processo de desenvolvimento de motores elétricos e o estudo das
cargas aplicadas a estes, com a realização de ensaios em laboratório.
Foi realizado o estudo com aprofundamento utilizando trabalhos acadêmicos
para compor a base teórica e para os ensaios necessários no desenvolvimento.
Obteve-se êxito pelo caráter experimental, pois em muitos trabalhos não é
discutido um panorama completo sobre este tema, as perdas relacionadas no
projeto do motor elétrico e as possibilidades de seu modelamento utilizando recursos
alternativos e, principalmente, de baixo custo.
Considerações finais
Pretende-se dar continuidade ao estudo do banco de cargas com o intuito de
desenvolver um método para tornar viável a sua produção em série. Considera-se
este banco viável para aplicações principalmente em universidades e até mesmo em
indústria de pequeno e médio porte, também pela simplicidade e pelo baixo custo.
Um grande desafio para tornar viável esta aplicação é a análise detalhada do
processo de fabricação e a solução para problemas funcionais, como o acoplamento
mecânico e a aquisição de dados via processadores entre outros.
A desvantagem da utilização de controles automáticos neste projeto seria o
aumento do custo, então o equilíbrio entre o processo manual e a sua automação
poderá ser o diferencial e o sucesso deste projeto.
52
Referências bibliográficas
[1] Magalhães Filho, Paulo “Roteiro de Cálculo Aerodinâmico para Rotores Axiais de
Sopro Livre de Pequena Potência para Conforto “ Tese de Mestrado - FEI - 1978.
[2] Martignoni, Alfonso “Ensaios de máquinas elétricas”, Editora Globo, 2.ed., pp.
17-28, 1987.
[3] Fitzgerald, A. E., Kingsley JR., Kusko, A. C. (1975). Electric Machinery. McGraw-
Hill,
[4] Máquinas de fluxos – Bran, Richard/Souza, Zulcy de - Ao livro técnico S/A – Rio
de Janeiro – 1969
[5] DEYAMA, Shigheharo. Separata da Revista Mundo Elétrico, Ano3 N.30, Março,
1962.
[6] Hofmann – Curso de balanceamento de rotores - Realizado na empresa Ametek
do Brasil LTDA.
[7] Notas de aulas – Eletromagnetismo e Máquinas Elétricas, aulas Professor
Geraldo Peres Caixeta.
[8] Site Action Motors – Motores elétricos, http://www.actionmotors.com.br, data de
acesso: 05/nov/2010.
[9] Site Magtrol Inc. – Fabricante de dinamômetros, http://www.magtrol.com, data de
acesso: 05/nov/2010.
[10] Manual Schneider – Programa de formação técnica continuada, pág 4, Site
http://www.schneiderelectric.com data de acesso: 05/Nov/10
[11]Manual de motores elétricos Weg – Site http://www.weg.com.br data de acesso:
05/Nov/10
[12]Materiais internos do Departamento Laboratório de Engenharia – Ametek do
Brasil Ltda.
GLOSSARIO
Carga – Dispositivo a ser acionado por um motor.
Conjugado resistente – Conjugado absorvido pela carga.
Fluxo Magnético – Grandeza elétrica gerada pela variação do campo elétrico em
meio permeável eletromagnéticamente.

53
ANEXOS
ANEXO1 - DESENHO DO MOTOR PADRÃO


















