VIBRAÇÕES DE VIGAS: Modelos de massa e rigidez discretas · VIBRAÇÕES DE VIGAS: Modelos de...
103
VIBRAÇÕES DE VIGAS: Modelos de massa e rigidez discretas Ana Cláudia Sousa Neves Dissertação para obtenção do Grau de Mestre em Engenharia Civil Orientador: Prof. António Manuel Figueiredo Pinto da Costa Orientador: Prof. Fernando Manuel Fernandes Simões Júri Presidente: Prof. Luís Manuel Coelho Guerreiro Orientador: Prof. Fernando Manuel Fernandes Simões Vogal: Prof. Jorge Manuel Vinagre Alfaiate Maio de 2015
Transcript of VIBRAÇÕES DE VIGAS: Modelos de massa e rigidez discretas · VIBRAÇÕES DE VIGAS: Modelos de...

VIBRAÇÕES DE VIGAS:
Modelos de massa e rigidez discretas
Ana Cláudia Sousa Neves
Dissertação para obtenção do Grau de Mestre em
Engenharia Civil
Orientador: Prof. António Manuel Figueiredo Pinto da Costa
Orientador: Prof. Fernando Manuel Fernandes Simões
Júri
Presidente: Prof. Luís Manuel Coelho Guerreiro
Orientador: Prof. Fernando Manuel Fernandes Simões
Vogal: Prof. Jorge Manuel Vinagre Alfaiate
Maio de 2015

i

ii
Resumo
No presente trabalho estuda-se o comportamento dinâmico de vigas com diferentes condições de
apoio sujeitas a vibração em regime forçado ou em regime livre. Utilizando o Método dos Elementos
Discretos (MED), definem-se e apresentam-se as expressões que regem o movimento dos blocos em
que a viga é discretizada. Desenvolve-se um programa em ambiente MATLAB que permite calcular as
frequências próprias e os modos de vibração que são depois comparados com as soluções exactas
por forma a validar os modelos. O programa permite igualmente simular a evolução no tempo dos
sistemas dinâmicos em termos de deslocamentos, velocidades e acelerações. Analisa-se o efeito da
presença de uma ou mais fendas no(s) vão(s) no comportamento da viga; consideram-se fendas com
diferentes tamanhos e localizações. Para os vários modelos apresentados consideram-se três casos
distintos: ausência de fendas, fendas permanentemente abertas ou “breathing cracks” (fendas que
abrem e fecham ao longo do tempo consoante o sinal da curvatura). Os resultados obtidos são
expostos sob a forma de tabelas e gráficos e, sempre que possível, são comparados com as
soluções exactas ou com os resultados experimentais ou numéricos disponíveis na literatura.
Palavras-chave: vibração de vigas, blocos rígidos, rigidez discreta, “breathing crack”

iii
Abstract
In the present work the dynamic behavior of several beams with different support conditions, subjected
to forced or in free vibration, is studied. Using the Discrete Element Method (DEM), the expressions
governing the movement of the blocks in which the beam is discretized are derived and presented. A
MATLAB program that calculates natural frequencies and mode shapes is developed; the results are
then compared with the exact solutions, in order to validate the models. The program also allows to
simulate the evolution of the dynamic systems in time, yielding displacements, velocities and
accelerations. The effect on the beam behavior due to the introduction of one or more cracks is
analyzed; cracks with different sizes and positions are considered. Three distinctive cases for the
studied models are considered: non-existence of cracks, permanently opened cracks or “breathing
cracks” (cracks that open and close successively in time depending on the curvature sign). The
obtained results are shown with the help of tables and graphics and, when possible, compared with
the exact solutions or with experimental or numerical results found in literature.
Key-words: vibration of beams, rigid blocks, discrete stiffness, “breathing crack”
iv
Agradecimentos
Gostaria de agradecer em primeiro lugar aos professores António Pinto da Costa e Fernando Simões,
responsáveis pelo supervisionamento da presente tese, que se demonstraram sempre disponíveis e
interessados e sem os quais não seria possível desenvolver este trabalho. Gostaria também de
agradecer à minha família e amigos pelos seus conselhos e apoio ao longo destes meses.

v
Índice
Resumo................................................................................................................................................... ii
Abstract ................................................................................................................................................. iii
Agradecimentos ................................................................................................................................... iv
Índice ...................................................................................................................................................... v
Lista de figuras .................................................................................................................................... vii
Lista de Tabelas .................................................................................................................................... xi
1 Introdução ...................................................................................................................................... 1
1.1 Vibrações de vigas e o Método dos Elementos discretos (MED) ......................................... 1
1.2 Estrutura da dissertação e objectivos ................................................................................... 2
2 Modelo de elementos discretos de uma viga simplesmente apoiada ..................................... 3
2.1 Dinâmica de uma viga simplesmente apoiada homogénea considerando as
deformabilidades por flexão e por corte ................................................................................ 3
2.2 Modelo ignorando a deformabilidade por corte ..................................................................... 8
2.3 Exemplificação do modelo para o caso N=4 (Neild et al., 2001) ........................................ 10
2.4 Resultados ........................................................................................................................... 14
2.4.1 Frequências naturais .............................................................................................. 14
2.4.2 Modos de vibração ................................................................................................. 16
3 Modelo de elementos discretos de uma viga em consola ...................................................... 19
3.1 Dinâmica de uma viga em consola homogénea ................................................................. 19
3.2 Modelo ignorando a deformabilidade por esforço transverso ............................................. 20
3.3 Regime forçado de uma viga em consola modelada pelo Método dos Elementos Discretos
e actuada por uma força concentrada variável na extremidade ......................................... 24
3.4 Regime forçado de uma consola modelada pelo Método dos Elementos Discretos
considerando o amortecimento viscoso do tipo Rayleigh ................................................... 27
3.5 Consideração de uma fenda numa consola modelada pelo Método dos Elementos
Discretos .............................................................................................................................. 28
3.6 Resultados ........................................................................................................................... 31
3.6.1 Frequências naturais .............................................................................................. 31
3.6.2 Modos de vibração da viga sem fenda ................................................................... 33
3.6.3 Frequências de vibração da viga em consola com fenda ...................................... 35
3.6.4 Evolução dinâmica da oscilação de uma viga em consola com e sem fenda ....... 37
vi
4 Modelo de elementos discretos de uma viga suspensa ......................................................... 43
4.1 Dinâmica de uma viga suspensa homogénea .................................................................... 43
4.2 Resultados ........................................................................................................................... 51
4.2.1 Frequências naturais .............................................................................................. 51
4.2.2 Modos de vibração ................................................................................................. 52
4.2.3 Viga suspensa com fenda ...................................................................................... 54
5 Modelo de elementos discretos de uma viga simplesmente apoiada de dois tramos......... 59
5.1 Dinâmica de uma viga contínua de dois tramos, simplesmente apoiada e homogénea .... 59
5.2 Resultados numéricos ......................................................................................................... 66
5.2.1 Frequências naturais .............................................................................................. 67
5.2.2 Modos de vibração ................................................................................................. 67
5.2.3 Viga de dois tramos com fenda(s) .......................................................................... 69
5.2.4 Resultados numéricos ............................................................................................ 72
6 Conclusões ................................................................................................................................... 79
6.1 Contribuições ....................................................................................................................... 79
6.2 Desenvolvimentos futuros ................................................................................................... 80
Referências .......................................................................................................................................... 81
Anexos ..................................................................................................................................................... I
A.1. Modelo de elementos discretos [viga simplesmente apoiada] ............................................... I
A.2. Modos de vibração [viga simplesmente apoiada] ................................................................ III
A.3. Convergência de frequências [viga simplesmente apoiada] ................................................. V
A.4. Integração numérica considerando uma “breathing” crack [viga em consola] ..................... VI
A.5. Função que preforma a Integração numérica considerando uma “breathing crack” [viga em
consola] ................................................................................................................................ VI
A.6. Gráfico de acelerações no tempo considerando uma “breathing crack” [viga em consola]
VIII

vii
Lista de figuras
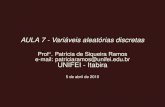
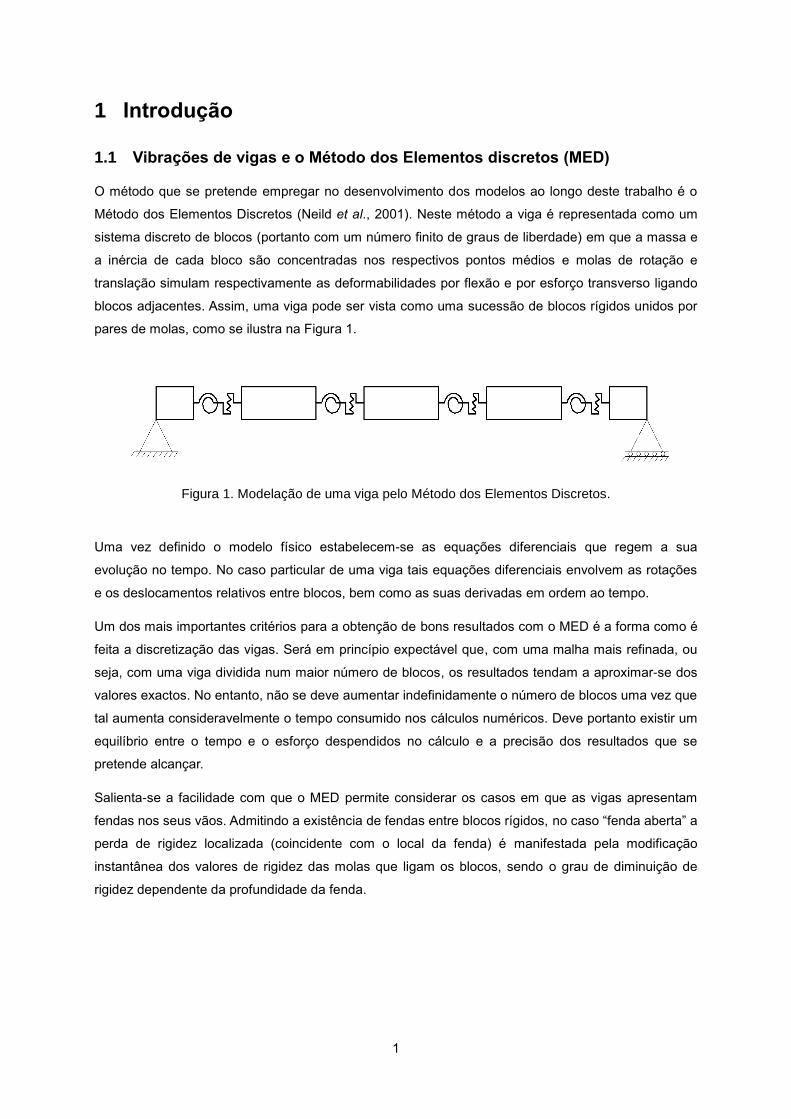
Figura 1. Modelação de uma viga pelo Método dos Elementos Discretos. ............................................ 1
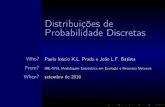
Figura 2. Viga simplesmente apoiada homogénea de secção rectangular. ........................................... 3
Figura 3. Esquema de decomposição da viga simplesmente apoiada em blocos. ................................ 3
Figura 4. Modelo de elementos discretos da viga simplesmente apoiada onde a rigidez também é
discretizada nas interfaces entre blocos. ................................................................................................ 3
Figura 5. Diagrama de corpo livre de um bloco genérico da viga simplesmente apoiada. .................... 4
Figura 6. Deformação de molas entre blocos consecutivos. .................................................................. 4
Figura 7. Modelo da deformação entre os centros de gravidade de dois blocos consecutivos:
diagrama de corpo livre. .......................................................................................................................... 5
Figura 8. Diagrama de corpo livre de um troço de viga de comprimento 𝑙 e correspondentes
diagramas de esforço transverso e momento flector de um bloco genérico. ......................................... 6
Figura 9. Método da carga unitária para o cálculo da rotação relativa. .................................................. 7
Figura 10. Método da carga unitária para o cálculo do deslocamento relativo. ...................................... 7
Figura 11. Ilustração da aplicação do teorema de d’Alembert a um bloco em forma de paralelepípedo
em movimento plano. .............................................................................................................................. 9
Figura 12. Modelo de blocos consecutivos, ignorando a deformabilidade por esforço transverso. ....... 9
Figura 13. Exemplificação da viga simplesmente apoiada com N=4. ................................................... 10
Figura 14. Convergência das cinco primeiras frequências da viga simplesmente apoiada em função
do número de blocos 𝑁. -----: 𝑝1𝑎/𝑝1𝑒 -----: 𝑝2𝑎/𝑝2𝑒 -----: 𝑝3𝑎/𝑝3𝑒 -----: 𝑝4𝑎/𝑝4𝑒 -----: 𝒑𝟓𝒂/𝒑𝟓𝒆. .............. 15
Figura 15. Primeiro, segundo e terceiro modos de vibração da viga simplesmente apoiada (12
blocos). .................................................................................................................................................. 16
Figura 16. Quarto e quinto modos de vibração da viga simplesmente apoiada (12 blocos). ............... 17
Figura 17. Quarto e quinto modos de vibração da viga simplesmente apoiada (24 blocos). ............... 17
Figura 18. Viga em consola homogénea de secção rectangular. ......................................................... 19
Figura 19. Esquema de decomposição da viga em consola em blocos. .............................................. 19
Figura 20. Modelo de elementos discretos da viga em consola onde a rigidez também é discretizada
nas interfaces entre blocos.................................................................................................................... 19
Figura 21. Viga em consola actuada por uma força oscilatória. ........................................................... 24
Figura 22. Modelo de elementos discretos da viga em consola actuada por uma força. ..................... 24
Figura 23. Forças generalizadas actuantes no centro de gravidade do bloco de extremidade. .......... 24

viii
Figura 24. Modelo do bloco actuado pela força exterior. ...................................................................... 25
Figura 25. Modelo da viga em consola considerando uma fenda plana de profundidade 𝑎 a uma
distância 𝑥𝑐 do encastramento. ............................................................................................................. 28
Figura 26. Perspectiva de um trecho da viga em consola onde se localiza a fenda plana de altura 𝑎 e
largura 𝑏. ............................................................................................................................................... 29
Figura 27. Dimensões da fenda. ........................................................................................................... 29
Figura 28. Modelo de elementos discretos da viga em consola considerando uma fenda. ................. 29
Figura 29. Fenda fechada, .................................................................................................................... 31
Figura 30. Fenda aberta, em que .......................................................................................................... 31
Figura 31. Convergência das cinco primeiras frequências da viga em consola em função do número
de blocos 𝑁. -----: 𝑝1𝑎/𝑝1𝑒 -----: 𝑝2𝑎/𝑝2𝑒 -----: 𝑝3𝑎/𝑝3𝑒 -----: 𝑝4𝑎/𝑝4𝑒 -----: 𝑝5𝑎/𝑝5𝑒 . ................................. 32
Figura 32. Primeiro, segundo e terceiro modos de vibração da viga em consola (12 blocos). ............ 33
Figura 33. Quarto e quinto modos de vibração da viga em consola (12 blocos). ................................. 34
Figura 34. Primeiro, segundo e terceiro modos de vibração da viga em consola (96 blocos). ............ 34
Figura 35. Quarto e quinto modos de vibração da viga em consola (96 blocos). ................................. 35
Figura 36. Frequências naturais em função da profundidade de uma fenda localizada à distância
𝑙𝑓 = 10,26 cm contada a partir do encastramento; Modelo com 40 blocos. .......................................... 36
Figura 37. Frequências naturais em função da profundidade de uma fenda localizada à distância
𝑙𝑓 = 90,31 cm contada a partir do encastramento; Modelo com 40 blocos. .......................................... 36
Figura 38. Frequências naturais em função da profundidade de uma fenda localizada à distância
𝑙𝑓 = 2,15 m contada a partir do encastramento; Modelo com 40 blocos. ............................................. 37
Figura 39. Modelo numérico da viga em consola: ausência de fenda (40 blocos). .............................. 38
Figura 40. Modelo numérico da viga em consola: fenda sempre aberta 𝑎 = 0.3ℎ (40 blocos). ........... 39
Figura 41. Modelo numérico da viga em consola: "breathing crack" 𝑎 = 0.3ℎ (40 blocos)................... 39
Figura 42. Modelo numérico da viga em consola: fenda sempre aberta 𝑎 = 0.45ℎ (40 blocos). ......... 40
Figura 43. Modelo numérico da viga em consola: "breathing crack" 𝑎 = 0.45ℎ (40 blocos)................. 40
Figura 44. Modelo experimental da viga em consola: "breathing crack" 𝑎 = 0.3ℎ (40 blocos). ............ 41
Figura 45. Modelo experimental da viga em consola: "breathing crack" 𝑎 = 0.3ℎ (80 blocos). ............ 42
Figura 46. Modelo de uma viga suspensa fendilhada actuada por uma força transversal ao plano de
suspensão. ............................................................................................................................................ 43
Figura 47. Modelo de elementos discretos de uma viga suspensa actuada por uma força transversal
ao plano de suspensão. ........................................................................................................................ 43

ix
Figura 48. Modelo de segmentação da viga suspensa. ........................................................................ 44
Figura 49. Modelo do bloco da extremidade esquerda da viga suspensa. ........................................... 44
Figura 50. Modelo de um bloco genérico da viga suspensa. ................................................................ 45
Figura 51. Modelo do bloco da viga suspensa onde a força actua. ...................................................... 45
Figura 52. Modelo do bloco da extremidade direita da viga suspensa. ................................................ 46
Figura 53. Convergência das cinco primeiras frequências da viga suspensa em função do número de
blocos 𝑁. -----: 𝑝1𝑎/𝑝1𝑒 -----: 𝑝2𝑎/𝑝2𝑒 -----: 𝑝3𝑎/𝑝3𝑒 -----: 𝑝4𝑎/𝑝4𝑒 -----: 𝑝5𝑎/𝑝5𝑒 ........................................ 52
Figura 54. Primeiro, segundo e terceiro modos de vibração da viga suspensa (31 blocos). ............... 53
Figura 55. Quarto e quinto modos de vibração da viga suspensa (31 blocos). .................................... 53
Figura 56. Posições da fenda, actuação da força e leitura da resposta. .............................................. 54
Figura 57. Modelo numérico da viga livre (𝜉 = 1% ou 2%): ausência de fenda (31 blocos). ................ 55
Figura 58. Modelo numérico da viga livre (𝜉 = 1% ou 2%): fenda sempre aberta 𝑎 = 0.4ℎ (31 blocos).
............................................................................................................................................................... 55
Figura 59. Modelo numérico da viga suspensa (𝜉 = 1%): "breathing crack" 𝑎 = 0.4ℎ (31 blocos). ..... 56
Figura 60. Modelo numérico da viga suspensa (𝜉 = 2%): "breathing crack" 𝑎 = 0.4ℎ (31 blocos). ..... 57
Figura 61. Modelo numérico da viga suspensa (𝜉 = 1%): "breathing crack" 𝑎 = 0.4ℎ (91 blocos). ..... 57
Figura 62. Modelo numérico da viga suspensa (𝜉 = 2%): "breathing crack" 𝑎 = 0.4ℎ (91 blocos). ..... 58
Figura 63. Modelo da viga simplesmente apoiada de dois tramos. ...................................................... 59
Figura 64. Modelo de discretização da viga simplesmente apoiada de dois tramos. ........................... 59
Figura 65. Modelo de elementos discretos da viga simplesmente apoiada de dois tramos. ................ 60
Figura 66. Primeiro, segundo e terceiro modos de vibração da viga simplesmente apoiada de dois
tramos (79 blocos). ___: 1º modo exacto; o: 1º modo calculado; ___: 2º modo exacto; o: 2º modo
calculado; ___: 3º modo exacto; o: 3º modo calculado. ....................................................................... 68
Figura 67. Quarto e quinto modos de vibração da viga simplesmente apoiada de dois tramos (79
blocos). ___: 4º modo exacto; o: 4º modo calculado; ___: 5º modo exacto; o: 5º modo calculado. .... 68
Figura 68. Duas fendas na parte superior da viga simplesmente apoiada de dois tramos iguais.
Dimensões em metros. .......................................................................................................................... 70
Figura 69. Duas fendas, uma na parte superior e outra na parte inferior da viga simplesmente apoiada
de dois tramos iguais. Dimensões em metros. ..................................................................................... 70
Figura 70. Quatro fendas na parte superior da viga simplesmente apoiada de dois tramos. Dimensões
em metros .............................................................................................................................................. 71

x
Figura 71. Quatro fendas, duas na parte superior e duas na parte inferior da viga simplesmente
apoiada de dois tramos. Dimensões em metros ................................................................................... 72
Figura 72. Aceleração da secção do meio do vão AB com ausência de fendas. Condições iniciais: em
repouso com a geometria do 1º modo sem fendas............................................................................... 72
Figura 73. Aceleração da secção do meio do vão AB: uma fenda superior sempre aberta localizada
entre os blocos 4 e 5 (do vão AB). Condições iniciais: em repouso com a geometria do 1º modo sem
fendas. ................................................................................................................................................... 73
Figura 74. Aceleração da secção do meio do vão AB: uma “breathing crack” superior localizada entre
os blocos 4 e 5 (do vão AB). Condições iniciais: em repouso com a geometria do 1º modo sem
fendas. ................................................................................................................................................... 73
Figura 75. Deslocamento da secção do meio do vão AB com ausência de fendas. Condições iniciais:
em repouso com a geometria do 1º modo sem fendas......................................................................... 74
Figura 76. Deslocamento da secção do meio do vão AB: uma fenda superior sempre aberta localizada
entre os blocos 4 e 5. Condições iniciais: em repouso com a geometria do 1º modo sem fendas. ..... 75
Figura 77. Deslocamento da secção do meio do vão AB: uma “breathing crack” superior localizada
entre os blocos 4 e 5. Condições iniciais: em repouso com a geometria do 1º modo sem fendas ...... 75
Figura 78. Aceleração da secção do meio do vão AB: duas “breathing cracks” superiores localizadas
entre os blocos 4 e 5 e os blocos 13 e 14. Condições iniciais: em repouso com a geometria do 1º
modo sem fendas. ................................................................................................................................. 76
Figura 79. Aceleração da secção do meio do vão AB: duas “breathing cracks”, uma superior
localizada entre os blocos 4 e 5 e uma inferior localizada ente os blocos 13 e 14. Condições iniciais:
em repouso com a geometria do 1º modo sem fendas......................................................................... 76
Figura 80. Aceleração da secção do meio do vão AB: quatro “breathing cracks” superiores localizadas
entre os blocos 3/4, 4/5,13/14 e 14/15. Condições iniciais: em repouso com a geometria do 1º modo
sem fendas. ........................................................................................................................................... 77
Figura 81. Aceleração da secção do meio do vão AB: quatro “breathing crack”, duas superiores
localizadas entre os blocos 3/4 e 4/5, duas inferiores localizadas entre os blocos 13/14 e 14/15.
Condições iniciais: em repouso com a geometria do 1º modo sem fendas. ........................................ 78

xi
Lista de Tabelas
Tabela 1. Propriedades geométricas e materiais da viga simplesmente apoiada. ............................... 14
Tabela 2. Frequências naturais exactas e aproximadas da viga simplesmente apoiada. .................... 15
Tabela 3. Propriedades geométricas e físicas da viga em consola. ..................................................... 31
Tabela 4. Frequências naturais exactas e aproximadas da viga em consola. ...................................... 32
Tabela 5. Propriedades geométricas e físicas da viga em consola (Loutridis et al., 2005). ................. 37
Tabela 6. Propriedades geométricas e físicas da viga suspensa. ........................................................ 51
Tabela 7. Frequências naturais exactas e aproximadas da viga suspensa. ......................................... 51
Tabela 8. Número de incógnitas do sistema (153) a resolver para a viga simplesmente apoiada de
dois tramos. ........................................................................................................................................... 63
Tabela 9. Propriedades geométricas e físicas da viga simplesmente apoiada de dois tramos. ........... 66
Tabela 10. Frequências naturais exactas e aproximadas da viga simplesmente apoiada de dois
tramos iguais. ........................................................................................................................................ 67
Tabela 11. Condições de abertura/fecho de duas fendas superiores do tipo "breathing crack". O
ângulo de rotação é positivo no sentido trigonométrico directo. ........................................................... 70
Tabela 12. Condições de abertura/fecho de uma fenda superior e outra inferior, ambas do tipo
"Breathing crack". O ângulo de rotação é positivo no sentido trigonométrico directo. ......................... 71
1
1 Introdução
1.1 Vibrações de vigas e o Método dos Elementos discretos (MED)
O método que se pretende empregar no desenvolvimento dos modelos ao longo deste trabalho é o
Método dos Elementos Discretos (Neild et al., 2001). Neste método a viga é representada como um
sistema discreto de blocos (portanto com um número finito de graus de liberdade) em que a massa e
a inércia de cada bloco são concentradas nos respectivos pontos médios e molas de rotação e
translação simulam respectivamente as deformabilidades por flexão e por esforço transverso ligando
blocos adjacentes. Assim, uma viga pode ser vista como uma sucessão de blocos rígidos unidos por
pares de molas, como se ilustra na Figura 1.
Figura 1. Modelação de uma viga pelo Método dos Elementos Discretos.
Uma vez definido o modelo físico estabelecem-se as equações diferenciais que regem a sua
evolução no tempo. No caso particular de uma viga tais equações diferenciais envolvem as rotações
e os deslocamentos relativos entre blocos, bem como as suas derivadas em ordem ao tempo.
Um dos mais importantes critérios para a obtenção de bons resultados com o MED é a forma como é
feita a discretização das vigas. Será em princípio expectável que, com uma malha mais refinada, ou
seja, com uma viga dividida num maior número de blocos, os resultados tendam a aproximar-se dos
valores exactos. No entanto, não se deve aumentar indefinidamente o número de blocos uma vez que
tal aumenta consideravelmente o tempo consumido nos cálculos numéricos. Deve portanto existir um
equilíbrio entre o tempo e o esforço despendidos no cálculo e a precisão dos resultados que se
pretende alcançar.
Salienta-se a facilidade com que o MED permite considerar os casos em que as vigas apresentam
fendas nos seus vãos. Admitindo a existência de fendas entre blocos rígidos, no caso “fenda aberta” a
perda de rigidez localizada (coincidente com o local da fenda) é manifestada pela modificação
instantânea dos valores de rigidez das molas que ligam os blocos, sendo o grau de diminuição de
rigidez dependente da profundidade da fenda.
2
1.2 Estrutura da dissertação e objectivos
Pretende-se estudar e simular o comportamento dinâmico no tempo de vários modelos de vigas
através da implementação do Método dos Elementos Discretos em MATLAB.
No próximo capítulo começa-se por estudar o modelo de uma viga simplesmente apoiada, que
constitui, a par da viga em consola, uns dos elementos estruturais básicos da engenharia civil e um
dos mais fáceis de modelar. Deduzem-se as equações diferenciais ordinárias de segunda ordem que,
integradas, por exemplo pelo método de Runge-Kutta, permitem obter uma aproximação da evolução
do comportamento dinâmico da viga no tempo. Estuda-se um modelo de apenas quatro blocos, para
que seja mais fácil compreender como se definem as equações num caso concreto com um número
reduzido de blocos. Apresenta-se uma tabela com os valores das frequências próprias calculadas em
função do grau de refinamento do modelo, delimita-se a percentagem de erro que é aceitável e
escolhe-se um número de blocos conveniente para as simulações. Apresenta-se ainda um gráfico
que permite observar a convergência das primeiras cinco frequências calculadas em função do
número de blocos e um gráfico com os cinco primeiros modos calculados e exactos.
No Capítulo 3 estuda-se o modelo de uma viga em consola repetindo-se os procedimentos do
capítulo anterior para a viga simplesmente apoiada. Adicionalmente, consideram-se novas situações
para o modelo, como a actuação de uma força exterior sobre a viga e a existência de uma fenda (que
introduz uma descontinuidade de rigidez no modelo). Considera-se a possibilidade de a fenda estar
sempre aberta ou a possibilidade de se tratar de uma “breathing crack” (uma fenda que abre e fecha
sucessivamente ao longo do tempo consoante o sinal de curvatura da secção da viga onde se situa a
fenda). Efectuam-se integrações numéricas para um modelo numérico correspondente a um modelo
experimental e apresentam-se os gráficos da resposta dinâmica da viga em termos de acelerações
(calculadas/lidas no ponto médio de um bloco em específico) para cada tipo de fenda. Apresentam-se
ainda gráficos que demonstram a evolução das frequências naturais em função da profundidade e da
localização da fenda na viga em consola.
Seguidamente, no Capítulo 4, efectua-se um estudo análogo para uma viga fendilhada suspensa
submetida a uma força exterior oscilatória actuando perpendicularmente ao plano de suspensão e
livre de condições de apoio no seu plano de movimento.
No penúltimo capítulo, estuda-se uma viga simplesmente apoiada de dois tramos, que vibra em
regime livre e contém uma ou mais fendas em diferentes posições. Consideram-se várias
combinações de posições das fendas.
O último capítulo, é como habitualmente, dedicado ao balanço das conclusões que se tiraram no
decorrer das investigações numéricas efectuadas e a enumerar alguns aspectos que merecem um
desenvolvimento futuro.
3
2 Modelo de elementos discretos de uma viga
simplesmente apoiada
2.1 Dinâmica de uma viga simplesmente apoiada homogénea considerando
as deformabilidades por flexão e por corte
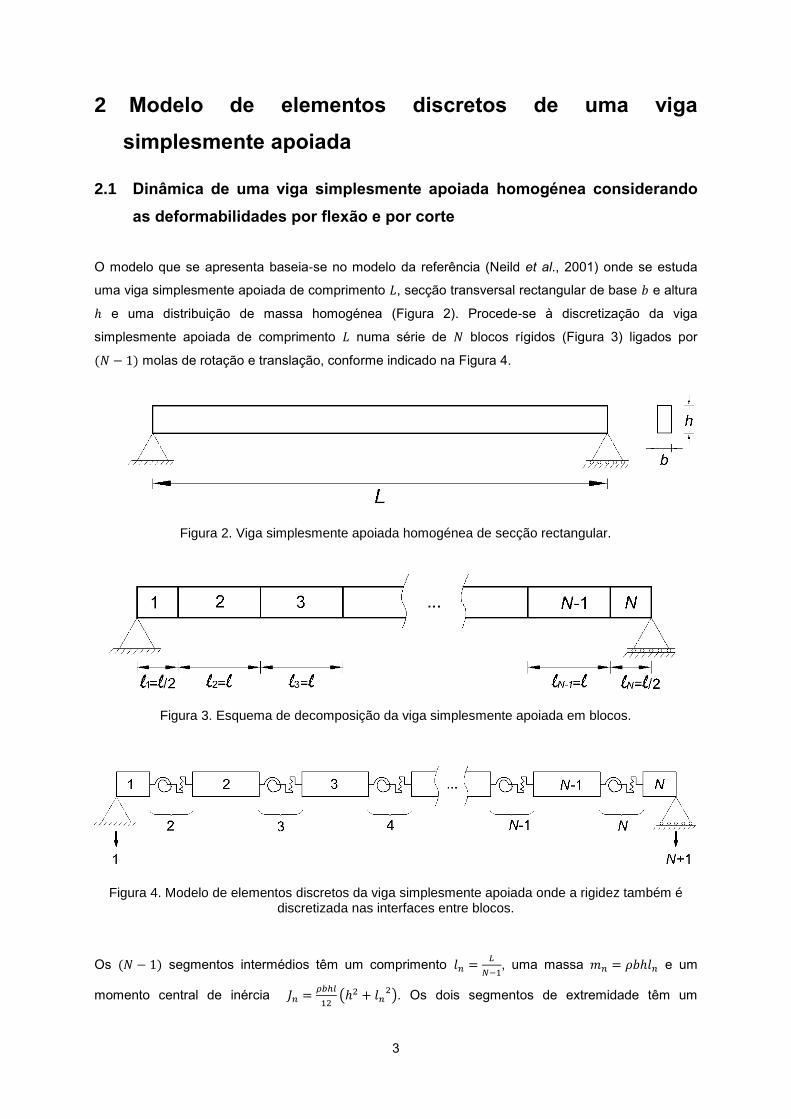
O modelo que se apresenta baseia-se no modelo da referência (Neild et al., 2001) onde se estuda
uma viga simplesmente apoiada de comprimento 𝐿, secção transversal rectangular de base 𝑏 e altura
ℎ e uma distribuição de massa homogénea (Figura 2). Procede-se à discretização da viga
simplesmente apoiada de comprimento 𝐿 numa série de 𝑁 blocos rígidos (Figura 3) ligados por
(𝑁 − 1) molas de rotação e translação, conforme indicado na Figura 4.
Figura 2. Viga simplesmente apoiada homogénea de secção rectangular.
Figura 3. Esquema de decomposição da viga simplesmente apoiada em blocos.
Figura 4. Modelo de elementos discretos da viga simplesmente apoiada onde a rigidez também é discretizada nas interfaces entre blocos.
Os (𝑁 − 1) segmentos intermédios têm um comprimento 𝑙𝑛 =𝐿
𝑁−1, uma massa 𝑚𝑛 = 𝜌𝑏ℎ𝑙𝑛 e um
momento central de inércia 𝐽𝑛 =𝜌𝑏ℎ𝑙
12(ℎ2 + 𝑙𝑛
2). Os dois segmentos de extremidade têm um

4
comprimento 𝑙𝑛
2=
𝐿
2(𝑁−1) , uma massa 𝑚𝑒 = 𝜌𝑏ℎ
𝑙𝑛
2 e um momento central de inércia 𝐽𝑒 =
𝜌𝑏ℎ(𝑙𝑛 2⁄ )
12(ℎ2 +
(𝑙𝑛
2)2
).
A Figura 5 representa o diagrama de corpo livre de um bloco genérico intermédio 𝑛, com uma dada
rotação 𝜃𝑛 (positiva no sentido directo) e deslocamento 𝑦𝑛 do centro de gravidade (positivo no sentido
ascendente), os respectivos momentos flectores à esquerda e à direita, 𝑀𝑛 e 𝑀𝑛+1, e os esforços
transversos à esquerda e à direita, 𝑆𝑛 e 𝑆𝑛+1. Uma vez que admitimos rotações de pequena amplitude
é indiferente considerarmos 𝑆𝑛 e 𝑆𝑛+1 na direcção vertical ou na direcção perpendicular ao eixo
longitudinal do bloco.
Figura 5. Diagrama de corpo livre de um bloco genérico da viga simplesmente apoiada.
A Figura 6 mostra a deformação das molas de rotação (de rigidez à flexão 𝐾𝑛) e de translação (de
rigidez ao corte 𝑉𝑛) entre dois blocos consecutivos 𝑛 − 1 e 𝑛. Se 𝑙 designar o comprimento de cada
bloco intermédio ou, se se preferir, o comprimento de influência da 𝑛-ésima mola, o equilíbrio do troço
de modelo entre os centros de gravidade de dois segmentos consecutivos entre os blocos
intermédios 𝑛 e 𝑛 − 1 (Figura 7) conduz a
Figura 6. Deformação de molas entre blocos consecutivos.

5
𝜃𝑛 − 𝜃𝑛−1 =𝑀𝑛𝐾𝑛 . (1)
Figura 7. Modelo da deformação entre os centros de gravidade de dois blocos consecutivos: diagrama de corpo livre.
Se 𝛿𝑛 =𝑆𝑛
𝑉𝑛 designar a deformação da mola de translação da 𝑛-ésima ligação (Figura 7) tem-se
𝛿𝑛 = 𝑦𝑛 − 𝑦𝑛−1 −𝑙
2𝜃𝑛 −
𝑙
2𝜃𝑛−1, (2)
pelo que
𝑦𝑛 − 𝑦𝑛−1 =𝑙
2𝜃𝑛 +
𝑙
2𝜃𝑛−1 +
𝑆𝑛𝑉𝑛. (3)
Da Equação (1) obtém-se sucessivamente
𝑙
2𝜃𝑛 =
𝑙
2𝜃𝑛−1 +
𝑙
2
𝑀𝑛𝐾𝑛
(4)
e
𝑦𝑛 − 𝑦𝑛−1 = 𝑙𝜃𝑛−1 +
𝑙
2
𝑀𝑛𝐾𝑛+𝑆𝑛𝑉𝑛. (5)

6
Os esforços (𝑀𝑛, 𝑆𝑛) representam o momento flector e o esforço transverso, respectivamente, entre o
centro de gravidade do bloco 𝑛 − 1 e o centro de gravidade do bloco 𝑛. Calcule-se agora 𝜃𝑛 − 𝜃𝑛−1 e
𝑦𝑛 − 𝑦𝑛−1 para um troço de comprimento 𝑙 de uma viga contínua considerando as deformabilidades
por flexão e por esfoço transverso. O objectivo é relacionar as rigidezes das molas de rotação e
translação (𝐾𝑛 e 𝑉𝑛, respectivamente) com as rigidezes à flexão (𝐸𝐼) e ao esforço transverso (𝑘𝐴𝐺) da
viga contínua.
Figura 8. Diagrama de corpo livre de um troço de viga de comprimento 𝑙 e correspondentes diagramas de esforço transverso e momento flector de um bloco genérico.
A rotação relativa 𝜃𝑛 − 𝜃𝑛−1 e o deslocamento transversal relativo 𝑦𝑛 − 𝑦𝑛−1 podem ser calculados
pelo método da carga unitária. A Figura 8 representa os diagramas de momentos flectores e esforços
transversos genéricos de um troço de comprimento 𝑙 em regime estático e sem carregamento
transversal; esses esforços são portanto integrados com os seus homólogos devidos à aplicação de
um sistema de cargas unitárias auto-equilibrado como é indicado na Figura 9 (para o cálculo de
rotação relativa) e 10 (para o cálculo dos deslocamento transversal relativo).

7
Figura 9. Método da carga unitária para o cálculo da rotação relativa.
Figura 10. Método da carga unitária para o cálculo do deslocamento relativo.
A rotação relativa é dada por
𝜃𝑛 − 𝜃𝑛−1 = ∫
𝑀𝑀
𝐸𝐼𝑑𝑥
𝑙
0
+∫𝑉𝑉
𝑘𝐴𝐺𝑑𝑥
𝑙
0
= 1
𝐸𝐼
1
2[𝑀𝑛 +
𝑙
2𝑆𝑛 +𝑀𝑛 −
𝑙
2𝑆𝑛] 𝑙 =
𝑀𝑛𝑙
𝐸𝐼 (6)
e o deslocamento transversal relativo obtém-se de
1 × 𝑦𝑛 − 1 × 𝑦𝑛−1 − 𝑙 × 1𝜃𝑛−1 = ∫
𝑀𝑀
𝐸𝐼𝑑𝑥
𝑙
0
+∫𝑉𝑉
𝑘𝐴𝐺𝑑𝑥
𝑙
0
, (7)
que equivale a

8
𝑦𝑛 − 𝑦𝑛−1 = 𝑙𝜃𝑛−1 +
𝑙2
2𝐸𝐼𝑀𝑛 + (
𝑙
𝑘𝐴𝐺+𝑙3
12𝐸𝐼) 𝑆𝑛 . (8)
Por comparação entre as Equações (1) e (6) obtém-se a rigidez à flexão que a mola entre dois blocos
consecutivos deve ter,
𝐾𝑛 =
𝐸𝐼
𝑙. (9)
Analogamente, a comparação entre as equações (5) e (8) conduz a
𝑉𝑛 =
𝑘𝐴𝐺
𝑙
1
1 +𝑘𝐴𝐺𝑙2
12𝐸𝐼
. (10)
Considerando uma secção rectangular (em que o inverso do factor de corte é 𝑘 =5
6), tomando um
valor de 𝐸
𝑘𝐺= 3 proposto em (Clough & Penzien, 1993) e considerando 𝑙 =
𝐿
𝑁−1, obtém-se
𝑉𝑛 =
𝑘𝐴𝐺
𝑙
1
1 +𝑘𝐺𝐸𝐴𝑙2
12𝐼
=𝑘𝐴𝐺
𝑙
1
1 +1
3𝜆2(𝑁 − 1)2
, (11)
em que
𝜆 =
ℎ
𝐿 (12)
é uma medida de esbelteza da viga. Notar que 𝑉𝑛 →𝑘𝐴𝐺
𝑙 quando 𝑁 → ∞, como seria de esperar. A
deformabilidade por esforço transverso da viga não deve ser ignorada e é especialmente relevante
nos casos em que a esbelteza é reduzida.
2.2 Modelo ignorando a deformabilidade por corte
A maior simplificação decorrente de se ignorar a deformação por corte é que o deslocamento
transversal relativo 𝑦𝑛 − 𝑦𝑛−1 pode ser expresso apenas em função das rotações dos blocos
adjacentes. Assim, a modelação da deformabilidade reduz-se à consideração de simples molas de
rotação entre blocos, eliminando-se as molas de translação. As equações que regem o movimento do
𝑛-ésimo bloco são
𝑚𝑛��𝑛 = 𝑆𝑛+1 − 𝑆𝑛, (13)
𝐽𝑛��𝑛 = 𝑀𝑛+1 −𝑀𝑛 +
𝑙𝑛2(𝑆𝑛+1 + 𝑆𝑛), (14)
9
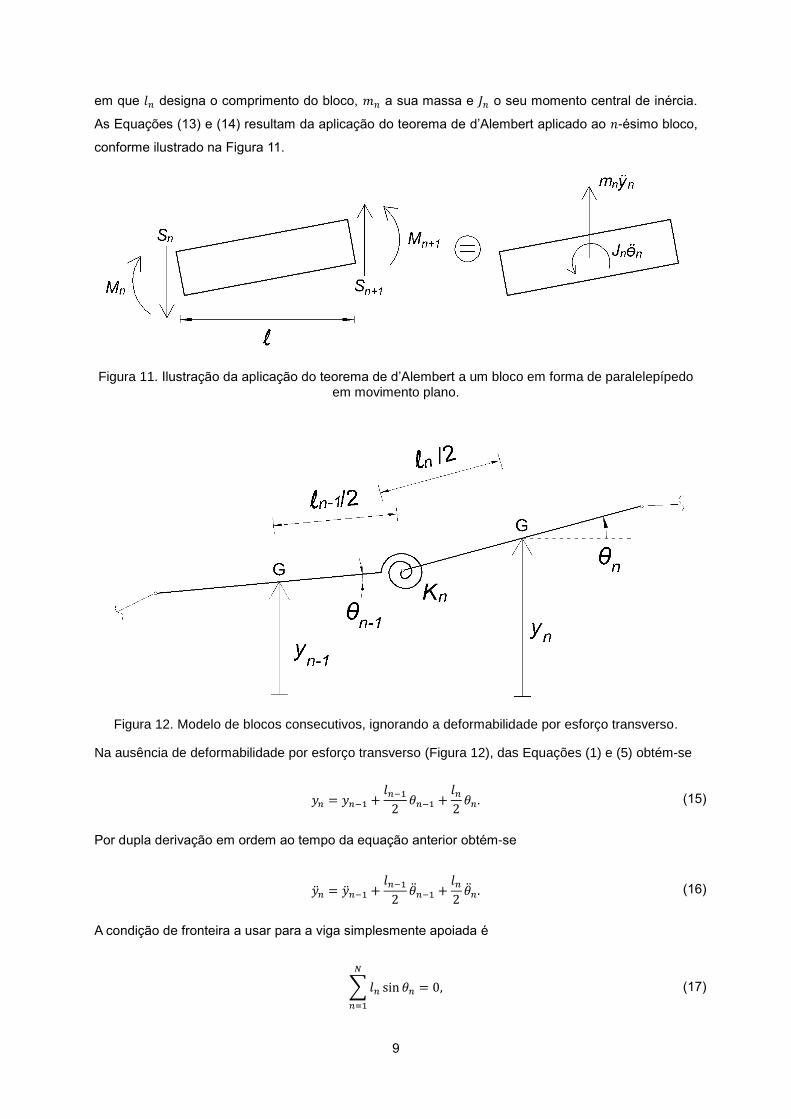
em que 𝑙𝑛 designa o comprimento do bloco, 𝑚𝑛 a sua massa e 𝐽𝑛 o seu momento central de inércia.
As Equações (13) e (14) resultam da aplicação do teorema de d’Alembert aplicado ao 𝑛-ésimo bloco,
conforme ilustrado na Figura 11.
Figura 11. Ilustração da aplicação do teorema de d’Alembert a um bloco em forma de paralelepípedo em movimento plano.
Figura 12. Modelo de blocos consecutivos, ignorando a deformabilidade por esforço transverso.
Na ausência de deformabilidade por esforço transverso (Figura 12), das Equações (1) e (5) obtém-se
𝑦𝑛 = 𝑦𝑛−1 +
𝑙𝑛−12𝜃𝑛−1 +
𝑙𝑛2𝜃𝑛. (15)
Por dupla derivação em ordem ao tempo da equação anterior obtém-se
��𝑛 = ��𝑛−1 +
𝑙𝑛−12��𝑛−1 +
𝑙𝑛2��𝑛. (16)
A condição de fronteira a usar para a viga simplesmente apoiada é
∑𝑙𝑛 sin 𝜃𝑛
𝑁
𝑛=1
= 0, (17)

10
que para o ângulos pequenos se escreve como uma combinação linearmente dependente das
rotações dos blocos,
∑𝑙𝑛
𝑁
𝑛=1
𝜃𝑛 = 0. (18)
2.3 Exemplificação do modelo para o caso N=4 (Neild et al., 2001)
Nesta secção aplica-se o método descrito a um modelo de viga simplesmente apoiada divida em 4
blocos (Figura 13).
Figura 13. Exemplificação da viga simplesmente apoiada com N=4.
As equações que regem o movimento transversal dos centros de gravidade dos quatro blocos são
{
𝑚1��1 = 𝑆2 − 𝑆1𝑚2��2 = 𝑆3 − 𝑆2𝑚3��3 = 𝑆4 − 𝑆3𝑚4��4 = 𝑆5 − 𝑆4
(19)
cuja forma matricial é
[
𝑚1 0 0 00 𝑚2 0 00 0 𝑚3 00 0 0 𝑚4
] {
��1��2��3��4
} = [
1 0 0 0−1 1 0 00 −1 1 00 0 −1 1
]{
𝑆2𝑆3𝑆4𝑆5
} − {
1000
} 𝑆1 (20)
ou, de uma forma mais compacta,
���� = ���� − ��𝑆1, (21)
em que �� é a matriz de massa e 𝑆1 é o esforço transverso no apoio esquerdo. As equações que
regem o movimento de rotação são

11
[
𝐽1 0 0 00 𝐽2 0 00 0 𝐽3 00 0 0 𝐽4
]
{
��1��2��3��4}
=
[
1 0 0−1 1 00 −1 10 0 −1
] {
𝑀2𝑀3𝑀4
} +1
2[
𝑙1 0 0 00 𝑙2 0 00 0 𝑙3 00 0 0 𝑙4
] [
1 0 0 01 1 0 00 1 1 00 0 1 1
]{
𝑆2𝑆3𝑆4𝑆5
} + {
1000
}𝑆1
(22)
ou, de uma forma equivalente,
���� = ���� +
1
2��(���� + ��𝑆1), (23)
em que
{
𝑀2𝑀3𝑀4
} = [
𝐾2 0 00 𝐾3 00 0 𝐾4
] [−1 1 0 00 −1 1 00 0 −1 1
]{
𝜃1𝜃2𝜃3𝜃4
} (24)
ou, simplesmente,
�� = ������. (25)
As equações de compatibilidade (15)
[
1 0 0 0−1 1 0 00 −1 1 00 0 −1 1
] {
𝑦1𝑦2𝑦3𝑦4
} =1
2[
1 0 0 01 1 0 00 1 1 00 0 1 1
] [
𝑙1 0 0 00 𝑙2 0 00 0 𝑙3 00 0 0 𝑙4
] {
𝜃1𝜃2𝜃3𝜃4
} (26)
podem escrever-se na forma
���� =
1
2������ (27)
que, por dupla derivação em ordem ao tempo, implicam
���� =
1
2������. (28)
A condição de fronteira (18)
{𝑙1 𝑙2 𝑙3 𝑙4} {
𝜃1𝜃2𝜃3𝜃4
} = 0 (29)
pode escrever-se na forma

12
��𝑇�� = 0. (30)
De (21) obtém-se �� = 𝐴−1𝑚�� + 𝐴−1��𝑆1 e de (28) obtém-se �� =1
2𝐴−1��𝐿�� de onde resulta
�� =
1
2𝐴−1𝑚 𝐴−1��𝐿�� + 𝐴−1��𝑆1. (31)
Substituindo a fórmula anterior e (25) em (23) obtém-se
(𝐽 −1
4𝐿𝐵 𝐴−1𝑚 𝐴−1��𝐿) �� = ��𝐾 𝐷�� +
1
2𝐿(�� + 𝐵 𝐴−1��)𝑆1. (32)
Definindo
𝐸−1 = 𝐽 −
1
4𝐿𝐵 𝐴−1𝑚 𝐴−1��𝐿 (33)
e reparando que
1
2𝐿(�� + 𝐵 𝐴−1��) =
1
2[
𝑙1 0 0 00 𝑙2 0 00 0 𝑙3 00 0 0 𝑙4
]({
1000
} + [
1 0 0 01 1 0 00 1 1 00 0 1 1
] [
1 0 0 0−1 1 0 00 −1 1 00 0 −1 1
]
−1
{
1000
}) = {
𝑙2𝑙3𝑙4𝑙5
} = ��, (34)
a Equação (32) pode escrever-se na forma mais compacta
�� = 𝐸 𝐶 𝐾 𝐷�� + 𝐸��𝑆1. (35)
A segunda derivada temporal da condição de fronteira (30) é ��𝑇 �� = 0 e pode ser usada para eliminar
𝑆1 de (35) como se indica seguidamente. Efectuando a operação
��𝑇 �� = ��𝑇𝐸 𝐶 𝐾 𝐷�� + ��𝑇𝐸��𝑆1 = 0 (36)
obtém-se
𝑆1 = −
1
��𝑇𝐸 �� ��𝑇𝐸 𝐶 𝐾 𝐷�� (37)
que, introduzindo em (35), conduz a
�� = (�� −
𝐸 �� ��𝑇
��𝑇𝐸��) 𝐸 𝐶 𝐾 𝐷��, (38)
em que �� é a matriz identidade, neste caso, de quarta ordem. A Equação (38) pode ser integrada por
qualquer método clássico de integração numérica, por exemplo o método de Runge-Kutta, com
condições iniciais adequadas,

13
��(0) = ��0, ��(0) = ��0. (39)
Notar que, tal como é geralmente aceite, no método de integração numérica deve usar-se um
incremento de tempo ∆𝑡 não superior a 1
30 do menor período que se pretende modelar. Por exemplo,
se forem dadas condições iniciais correspondentes à vibração do 𝑛-ésimo modo de vibração da viga
(configuração inicial em forma de seno com 𝑛 semi-ondas), então ∆𝑡 ≤1
30𝑇𝑛.
As frequências naturais exactas de uma viga simplesmente apoiada esbelta (teoria de Euler-
Bernoulli) são (Rao, 2004)
𝑝𝑛 = (𝛽𝑛𝐿)2√
𝐸𝐼
𝜌𝐴𝐿4 (40)
em que 𝜌 é a massa volúmica, 𝐴 a área da secção transversal, 𝐿 o comprimento e 𝐸𝐼 a rigidez à
flexão da viga e
𝛽1𝐿 = 𝜋, 𝛽2𝐿 = 2𝜋, 𝛽3𝐿 = 3𝜋, 𝛽4𝐿 = 4𝜋, 𝛽5𝐿 = 5𝜋,
são as cinco primeiras raízes da equação
sin(𝛽𝑛𝐿) = 0. (41)
Os períodos naturais exactos são
𝑇𝑛 =
2𝜋
𝑝𝑛. (42)
Os modos de vibração, por sua vez, são dados pelas funções
𝑊𝑛(𝑥) = 𝐶𝑛[sin(𝛽𝑛𝑥)]. (43)
Pode-se também usar o sistema de equações (38) para estimar aproximações das frequências
angulares naturais exactas (40)-(41) e os modos de vibração exactos (43). Assumindo uma solução
do tipo exponencial
��(𝑡) = ��𝑒𝜆𝑡 , (44)
obtém-se o seguinte problema de valores e vectores próprios algébrico
[𝜆2𝐼 − (𝐼 −
𝐸 �� ��𝑇
��𝑇𝐸 ��) 𝐸 𝐶 𝐾 𝐷] �� = 0 (45)
que só tem soluções �� não triviais quando a matriz dos coeficientes for singular, isto é, quando

14
det (𝜆2𝐼 − (𝐼 −
𝐸 �� ��𝑇
��𝑇𝐸 ��) 𝐸 𝐶 𝐾 𝐷) = 0. (46)
As soluções 𝜆 da equação característica anterior são imaginárias puras sendo as frequências naturais
dadas por
𝑝 = −i𝜆, (47)
em que i é a unidade imaginária (i2 = −1), o que corresponde a uma solução do tipo
��(𝑡) = ��𝑒𝑖𝑝𝑡 = ��[cos(𝑝𝑡) + 𝑖 sin(𝑝𝑡)]. (48)
Note-se que as equações obtidas para um modelo de 4 blocos podem ser facilmente generalizadas
para modelos com um número qualquer de blocos.
2.4 Resultados
Nesta secção adoptam-se as propriedades geométricas e físicas indicadas na Tabela 1 para a viga
simplesmente apoiada com o objectivo de se calcularem as suas frequências e modos de vibração
para graus de refinamento crescentes.
Tabela 1. Propriedades geométricas e materiais da viga simplesmente apoiada.
Propriedades geométricas
𝑏 [m] 0.06
ℎ [m] 0.22
𝐿 [m] 8.0
Propriedades do material
𝐸 [Pa] 210 × 109
𝜌 [kg/m3] 7800
2.4.1 Frequências naturais
Começou-se por calcular as frequências naturais a partir da resolução do problema de valores
próprios (46) para diferentes discretizações da viga em blocos. É então possível estudar a
convergência das frequências com o incremento do número de blocos usados na discretização do
modelo e, desta forma, validar o método usado na modelação.
A Tabela 2 apresenta as frequências naturais da viga obtidas de forma analítica (frequências exactas)
e usando o MED (frequências aproximadas), para um número crescente de blocos
(𝑁 = 12, 24, 48, 96, 192). A Figura 14 mostra o quociente entre as cinco primeiras frequências obtidas

15
Tabela 2. Frequências naturais exactas e aproximadas da viga simplesmente apoiada.
Modo Frequências exactas (𝑝𝑒)
(rad. s−1)
Frequências aproximadas (𝑝𝑎) (rad. s−1)
𝑁 = 12 𝑁 = 24 𝑁 = 48 𝑁 = 96 𝑁 = 192
1 50,818 50,801 50,802 50,802 50,802 50,802
2 203,271 202,995 203,016 203,018 203,018 203,018
3 457,358 455,802 456,057 456,079 456,083 456,083
4 813,082 807,330 808,912 809,040 809,060 809,064
5 1270,440 1253,242 1260,083 1260,575 1260,654 1260,671
6 1829,434 1783,879 1807,496 1808,989 1809,222 1809,273
com o modelo simplificado apresentado e as homólogas cinco primeiras frequências naturais, em
função do número de blocos (os mesmos indicados na tabela acima). Verifica-se que, ao aumentar o
número de blocos, as frequências tendem a convergir para os seus valores exactos. Observa-se
também que para obter boas aproximações das frequências elevadas é necessário um maior número
de blocos. Basta pensar nas formas dos vários modos para perceber que, para modos superiores é
necessária uma maior discretização para conseguir uma representação fidedigna das suas
geometrias mais complexas. Por exemplo, usando uma discretização de 24 blocos, para a terceira,
Figura 14. Convergência das cinco primeiras frequências da viga simplesmente apoiada em função
do número de blocos (𝑁). -----: 𝑝1𝑎/𝑝1𝑒 -----: 𝑝2𝑎/𝑝2𝑒 -----: 𝑝3𝑎/𝑝3𝑒 -----: 𝑝4𝑎/𝑝4𝑒 -----: 𝑝5𝑎/𝑝5𝑒 .

16
quarta e quinta frequências obtêm-se quocientes 𝑝𝑒/𝑝𝑎 de 99,72%, 99,49% e 99,19%,
respectivamente. Para se obter um erro inferior a 0,5% nas aproximações das três primeiras
frequências, podem ser usados apenas 12 blocos. Para se obter um erro inferior a 1% nas
aproximações das cinco primeiras frequências, já será preciso usar pelo menos 24 blocos.
2.4.2 Modos de vibração
Pela resolução do problema de valores e vectores próprios (Equação (45)) é possível obter os modos
de vibração. As Figuras 15, 16 e 17 representam os cinco primeiros modos exactos normalizados e
os cinco primeiros modos aproximados obtidos com o modelo numérico, também normalizados em
relação ao deslocamento máximo. Os gráficos das Figuras 15 e 16 dizem respeito a um modelo de
viga com 12 blocos e o gráfico da Figura 17 diz respeito a um modelo de viga com 24 blocos.
Também aqui se verifica que, tal como esperado, uma maior discretização resulta numa melhor
aproximação dos modos exactos. Verifica-se que 12 blocos reproduzem suficientemente bem os três
primeiros modos de vibração. No entanto, para se obter maior precisão na aproximação dos quarto e
quinto modos deverá aumentar-se o número de blocos para 24, como se pode verificar pela
comparação das Figuras 16 e 17.
Figura 15. Primeiro, segundo e terceiro modos de vibração da viga simplesmente apoiada (12 blocos).
___: 1º modo exacto; o: 1º modo calculado; ___: 2º modo exacto; o: 2º modo calculado
___: 3º modo exacto; o: 3º modo calculado.

17
Figura 16. Quarto e quinto modos de vibração da viga simplesmente apoiada (12 blocos).
___: 4º modo exacto; o: 4º modo calculado; ___: 5º modo exacto; o: 5º modo calculado.
Figura 17. Quarto e quinto modos de vibração da viga simplesmente apoiada (24 blocos).
___: 4º modo exacto; o: 4º modo calculado; ___: 5º modo exacto; o: 5º modo calculado.

18
Note-se que a determinação das frequências próprias e dos modos de vibração aproximados neste
capítulo (e, de forma semelhante, nos restantes capítulos do trabalho) é realizada através da
resolução de um problema de valores e vectores próprios. Neild et al. (2001) usaram um método
diferente: as frequências e os modos são obtidos através de uma transformada discreta de Fourier
em que é analisado o sinal do deslocamento gerado pelo modelo durante uma simulação dinâmica.

19
3 Modelo de elementos discretos de uma viga em consola
3.1 Dinâmica de uma viga em consola homogénea
O sistema físico que se pretende modelar é uma viga em consola de secção rectangular 𝑏 × ℎ e
massa volúmica 𝜌 uniformes ao longo do seu comprimento 𝐿 (Figura 18). A viga será decomposta em
Figura 18. Viga em consola homogénea de secção rectangular.
𝑁 blocos, como se ilustra na Figura 19 que corresponde à versão de rigidez discreta da Figura 20
onde se modela a ligação entre cada par de blocos consecutivos por meio de um par de molas (uma
de rotação e outra de translação). Os primeiro e último blocos têm um comprimento igual a metade do
comprimento dos blocos intermédios, estes com um comprimento 𝑙𝑛 =𝐿
𝑁−1, uma massa 𝑚𝑛 = 𝜌𝑏ℎ𝑙 e
um momento central de inércia em torno de um eixo perpendicular ao plano do movimento igual a
𝐽𝑛 =𝜌𝑏ℎ𝑙𝑛
2(ℎ2 + 𝑙𝑛
2). Considerou-se que o primeiro bloco está imóvel (encastrado).
Figura 19. Esquema de decomposição da viga em consola em blocos.
Figura 20. Modelo de elementos discretos da viga em consola onde a rigidez também é discretizada nas interfaces entre blocos.

20
As relações constitutivas a considerar são (ver o Capítulo 2)
𝜃𝑛 − 𝜃𝑛−1 =𝑀𝑛
𝐾𝑛, 𝑛 = 2,… , 𝑁 (49)
e
𝑦𝑛 − 𝑦𝑛−1 = 𝑙𝜃𝑛−1 +
𝑙
2
𝑀𝑛𝐾𝑛+𝑆𝑛𝑉𝑛, 𝑛 = 2,… , 𝑁,
(50)
em que, tal como no capítulo anterior, 𝑀𝑛 e 𝑆𝑛 são o momento flector e o esforço transverso na 𝑛-
ésima ligação entre blocos consecutivos e 𝐾𝑛 e 𝑉𝑛 representam a rigidez das molas de rotação e de
translação, respectivamente. As rigidezes discretas relacionam-se com as propriedades mecânicas
do modelo contínuo por
𝐾𝑛 =
𝐸𝐼
𝑙 (51)
e
𝑉𝑛 =
𝑘𝐴𝐺
𝑙
1
1 +13(
𝐿ℎ(𝑁 − 1)
)2 , (52)
se considerarmos uma secção transversal rectangular (recordar as expressões (9) e (11)). Nas
equações (51) e (52) 𝑙 designa o comprimento de cada bloco intermédio ou, se se preferir, o
comprimento de influência da 𝑛-ésima mola.
3.2 Modelo ignorando a deformabilidade por esforço transverso
A equação diferencial que rege o movimento de translação do n-ésimo bloco é
𝑚𝑛��𝑛 = 𝑆𝑛+1 − 𝑆𝑛 , 𝑛 = 2,… , 𝑁, (53)
pelo que o conjunto de todas as equações desse tipo se poderá escrever na forma matricial
[ 𝑚2 0 ⋯0 𝑚3 0⋮ 0 ⋱
⋯ 0⋮
⋮0 ⋯
𝑚𝑁−1 0
0 𝑚𝑁]
{
��2��3⋮
��𝑁−1��𝑁 }
=
[ −1 1 00 −1 1⋮
⋯ 0⋮
0 ⋯0 −1 1
0 −1]
{
𝑆2𝑆3⋮
𝑆𝑁−1𝑆𝑁 }
(54)
ou
𝑚�� = 𝐴�� . (55)

21
Chama-se a atenção para o facto de a numeração nas equações do movimento em (53) e (54)
começar em 2 e não em 1 porque, ao contrário do que sucede no caso da viga simplesmente apoiada
estudada no capítulo anterior, no modelo da viga em consola o primeiro bloco está encastrado e
portanto imóvel. A equação que rege o movimento angular do 𝑛-ésimo bloco é
𝐽𝑛��𝑛 = 𝑀𝑛+1 −𝑀𝑛 +
𝑙𝑛2(𝑆𝑛+1 + 𝑆𝑛). (56)
O conjunto das equações dos movimentos angulares dos blocos é
[ 𝐽2 0 ⋯0 𝐽3 0⋮ 0 ⋱
⋯ 0⋮
⋮0 ⋯
𝐽𝑁−1 0
0 𝐽𝑁]
{
��2��3⋮
��𝑁−1��𝑁 }
=
[ −1 1 00 −1 1⋮
⋯ 0⋮
0 ⋯0 −1 1
0 −1]
{
𝑀2𝑀3⋮
𝑀𝑁−1𝑀𝑁 }
+
+1
2
[ 𝑙2 0 ⋯0 𝑙3 0⋮ 0 ⋱
0⋮
0 ⋯
𝑙𝑁−1 0
0 𝑙𝑁]
[ 1 1 00 1 1⋮
⋯ 00 ⋮
0 ⋯0 1 1
0 1 ]
{
𝑆2𝑆3⋮
𝑆𝑁−1𝑆𝑁 }
(57)
ou
𝐽�� = 𝐴�� +
1
2𝐿����. (58)
Nas equações anteriores (recordar (49))
{
𝑀2𝑀3⋮
𝑀𝑁−1𝑀𝑁 }
=
[ 𝐾2 0 ⋯0 𝐾3 0⋮ 0 ⋱
⋯ 0⋮
⋮0 ⋯
𝐾𝑁−1 0
0 𝐾𝑁]
[ 1 0 ⋯−1 1 0⋮ −1 1
0⋮
⋮0 ⋯
1 00 −1 1 ]
{
𝜃2𝜃3⋮
𝜃𝑁−1𝜃𝑁 }
(59)
que, de uma forma mais compacta se poderá escrever
�� = 𝐾𝐷 �� ou �� = −𝐾 ��𝑇�� (60)
uma vez que a matriz 𝐷 = −𝐴𝑇.
A não consideração de deformabilidade por corte impõe as seguintes condições de compatibilidade
entre os deslocamentos transversais dos centros de massa dos blocos e as respectivas rotações,
𝑦𝑛 = 𝑦𝑛−1 +𝑙𝑛−1
2𝜃𝑛−1 +
𝑙𝑛
2𝜃𝑛 , (61)

22
condições que podem ser escritas na forma matricial
[ 1 0 0−1 1 00 −1 1
⋯ 0⋮
⋮0 ⋯
−1 1 00 −1 1 ]
{
𝑦2𝑦3⋮
𝑦𝑁−1𝑦𝑁 }
=
=1
2
[ 1 0 01 1 00 1 1
⋯ 0⋮
⋮0 ⋯
1 1 00 1 1 ]
[ 𝑙2 0 ⋯0 𝑙3 0⋮ 0 ⋱
0⋮
⋮0 ⋯
𝑙𝑁−1 0
0 𝑙𝑁]
{
𝜃2𝜃3⋮
𝜃𝑁−1𝜃𝑁 }
.
(62)
As 𝑁 − 1 equações anteriores são equivalentes a
−𝐴𝑇�� =
1
2𝐵𝑇𝐿��. (63)
A dupla derivação de (63) em ordem ao tempo conduz a
−𝐴𝑇 �� =
1
2𝐵𝑇𝐿��. (64)
Tem-se então um sistema de 4(𝑁 − 1) equações ((55), (58), (60) e (64)),
{
𝑚�� = 𝐴��
𝐽�� = 𝐴�� +1
2𝐿𝐵 ��
�� = −𝐾 ��𝑇��
−𝐴𝑇 �� =1
2𝐵𝑇𝐿��
(65a)
(65b)
(65c)
(65d)
a 4(𝑁 − 1) incógnitas (��, ��, ��, ��) para resolver. De (65a) obtém-se
𝑆 = 𝐴−1𝑚 �� (66)
que, substituída em (65b), fornece
𝐽�� = 𝐴�� +
1
2𝐿𝐵 𝐴−1𝑚��. (67)
Substituindo (65c) em (67) obtém-se
𝐽�� = −𝐴 𝐾 ��𝑇�� +
1
2𝐿𝐵 𝐴−1𝑚��. (68)
A resolução de (65d) em ordem a �� permite obter

23
�� = −
1
2𝐴−𝑇𝐵𝑇𝐿�� (69)
que, substituída em (68), conduz a
(𝐽 +
1
4𝐿𝐵 𝐴−1𝑚 𝐴−𝑇𝐵𝑇𝐿) �� + 𝐴 𝐾 ��𝑇�� = 0, (70)
um sistema de equações diferenciais ordinárias apenas em termos das 𝑁 − 1 rotações dos blocos. As
matrizes (𝐽 +1
4𝐿𝐵 𝐴−1𝑚 𝐴−𝑇𝐵𝑇𝐿) e 𝐴 𝐾 ��𝑇 são simétricas. O sistema (70) pode ainda ser escrito na
forma
�� = − (𝐽 +
1
4𝐿𝐵 𝐴−1𝑚 𝐴−𝑇𝐵𝑇𝐿)
−1
𝐴 𝐾 ��𝑇�� (71)
e deve ser complementado com um conjunto de condições iniciais adequadas
��(0) = ��0, ��(0) = ��0. (72)
As frequências angulares naturais exactas de uma viga em consola (Rao, 2004) são dadas pela
expressão (40) onde as cinco primeiras raízes da equação característica
cos(𝛽𝑛𝐿) cosh(𝛽𝑛𝐿) + 1 = 0 (73)
são
𝛽1𝐿 = 1.875104, 𝛽2𝐿 = 4.694091, 𝛽3𝐿 = 7.854757, 𝛽4𝐿 = 10.995541, 𝛽5𝐿 = 14.137168.
Os modos de vibração exactos, por sua vez, são dados pelas funções
𝑊𝑛(𝑥) = 𝐶𝑛 [sin(𝛽𝑛𝑥) − sinh(𝛽𝑛𝑥) − (
sin(𝛽𝑛𝐿) + sinh(𝛽𝑛𝐿)
cos(𝛽𝑛𝐿)+cosh(𝛽𝑛𝐿)) (cos(𝛽𝑛𝑥) − cosh(𝛽𝑛𝑥))]. (74)
Pode-se também usar o sistema de equações (71) para estimar aproximações das frequências
angulares naturais exactas (soluções de (73)) e dos modos de vibração exactos (74). Assumindo de
novo uma solução do tipo exponencial como indicado em (44) obtém-se o seguinte problema de
valores e vectores próprios algébrico
[𝜆2𝐼 + (𝐽 +
1
4𝐿𝐵 𝐴−1𝑚 𝐴−𝑇𝐵𝑇𝐿)
−1
𝐴 𝐾 ��𝑇] �� = 0 (75)
a partir do qual é possível calcular as frequências e modos de vibração aproximados.

24
3.3 Regime forçado de uma viga em consola modelada pelo Método dos
Elementos Discretos e actuada por uma força concentrada variável na
extremidade
Considera-se agora uma viga em consola homogénea actuada por uma força 𝐹(𝑡) aplicada na
extremidade e na direcção transversal ao eixo indeformado (Figura 21). A viga é decomposta num
conjunto de blocos rígidos ligados por molas como representado na Figura 22.
Figura 21. Viga em consola actuada por uma força oscilatória.
Figura 22. Modelo de elementos discretos da viga em consola actuada por uma força.
Para estabelecer as equações do movimento do último bloco é conveniente reduzir o sistema de
forças exteriores ao seu centro de gravidade (Figura 23). Aplicando o teorema de d’Alembert
Figura 23. Forças generalizadas actuantes no centro de gravidade do bloco de extremidade.

25
(ver Figura 24) ao último bloco (só o último bloco é que terá as equações do movimento afectadas
pela força exterior), obtém-se
𝑚𝑁��𝑁 = −𝑆𝑁 − 𝐹(𝑡),
𝐽𝑁��𝑁 = −𝑀𝑁 +𝑙𝑁2𝑆𝑁 −
𝑙𝑁2𝐹(𝑡).
(76)
Figura 24. Modelo do bloco actuado pela força exterior.
As equações do movimento dos 𝑁 − 2 blocos móveis restantes são iguais às que foram deduzidas
para os blocos intermédios da viga simplesmente apoiada no capítulo anterior. O sistema de
equações do movimento transversal passa a ser dado por
[ 𝑚2 0 ⋯0 𝑚3 0⋮ 0 ⋱
⋯ 0⋮
⋮0 ⋯
𝑚𝑁−1 0
0 𝑚𝑁]
{
��2��3⋮
��𝑁−1��𝑁 }
=
[ −1 1 00 −1 1⋮
⋯ 0⋮
0 ⋯0 −1 1
0 −1]
{
𝑆2𝑆3⋮
𝑆𝑁−1𝑆𝑁 }
−
{
0⋮
0𝐹(𝑡)}
(77)
ou, de uma forma mais compacta
𝑚�� = 𝐴�� − 𝐹(𝑡)��𝑁−1 (78)
em que ��𝑁−1 = {0 … 0 1}𝑇 ∈ ℝ𝑁−1 é o (𝑁-1)-ésimo vector da base ortonormada directa do espaço
ℝ𝑁−1. O conjunto das equações dos movimentos angulares dos blocos é
[ 𝐽2 0 ⋯0 𝐽3 0⋮ 0 ⋱
⋯ 0⋮
⋮0 ⋯
𝐽𝑁−1 0
0 𝐽𝑁]
{
��2��3⋮
��𝑁−1��𝑁 }
=
[ −1 1 00 −1 1⋮
⋯ 0⋮
0 ⋯0 −1 1
0 −1]
{
𝑀2𝑀3⋮
𝑀𝑁−1𝑀𝑁 }
+ (79)

26
+1
2
[ 𝑙2 0 ⋯0 𝑙3 0⋮ 0 ⋱
0⋮
0 ⋯
𝑙𝑁−1 0
0 𝑙𝑁]
[ 1 1 00 1 1⋮
⋯ 00 ⋮
0 ⋯0 1 1
0 1 ]
{
𝑆2𝑆3⋮
𝑆𝑁−1𝑆𝑁 }
−
{
0⋮
0𝑙𝑁
2𝐹(𝑡)}
.
Matricialmente, a equação anterior pode escrever-se na forma
𝐽�� = 𝐴�� +
1
2𝐿���� −
𝑙𝑁2𝐹(𝑡)��𝑁−1. (80)
Atendendo às Equações (60) e (64) o sistema de equações a ser resolvido é então
{
𝑚�� = 𝐴�� − 𝐹(𝑡)��𝑁−1
𝐽�� = 𝐴�� +1
2𝐿𝐵 �� −
𝑙𝑁2𝐹(𝑡)��𝑁−1
�� = −𝐾 ��𝑇��
−𝐴𝑇 �� =1
2𝐵𝑇𝐿��
.
(81a)
(81b)
(81c)
(81d)
Resolvendo a equação (81a) em ordem a �� obtém-se
�� = 𝐴−1���� + 𝐹(𝑡)𝐴−1��𝑁−1 = 𝐴−1���� + 𝐹(𝑡)1𝑁−1 (82)
em que 1𝑁−1 = {1 1 ⋯ 1}𝑇 ∈ ℝ𝑁−1 uma vez que
𝐴−1 =
[ −1 −1 −10 −1 −10 0 −1
⋯ −1⋮
⋮
00 −1 −10 0 −1]
. (83)
A substituição de (82) em (81b) permite obter
𝐽�� = 𝐴�� +
1
2𝐿𝐵 (𝐴−1���� + 𝐹(𝑡)1𝑁−1) −
𝑙𝑁2𝐹(𝑡)��𝑁−1
= 𝐴�� +1
2𝐿𝐵 𝐴−1���� +
1
2𝐹(𝑡)𝐿𝐵 1𝑁−1 −
𝑙𝑁2𝐹(𝑡)��𝑁−1.
(84)
Substituindo a igualdade
1
2𝐿𝐵 1𝑁−1 =
{
𝑙2𝑙3⋮
𝑙𝑁−11
2𝑙𝑁}
(85)

27
em (84), obtém-se
𝐽�� = 𝐴�� +
1
2𝐿𝐵 𝐴−1���� + 𝐹(𝑡)��′, (86)
em que ��′ = {𝑙2 𝑙3 … 𝑙𝑁−1 0}𝑇 ∈ ℝ𝑁−1. A substituição de (81c) em (86) conduz a
(𝐽 +1
4𝐿𝐵 𝐴−1𝑚 𝐴−𝑇𝐵𝑇𝐿) �� + 𝐴 𝐾 ��𝑇�� = 𝐹(𝑡)��′, (87)
em que as matrizes (𝐽 +1
4𝐿𝐵 𝐴−1𝑚 𝐴−𝑇𝐵𝑇𝐿) e 𝐴 𝐾 ��𝑇 são simétricas. O sistema anterior é equivalente
a
�� = −𝐸 𝐴 𝐾 ��𝑇�� + 𝐹(𝑡)𝐸��′ (88)
em que
𝐸 = (𝐽 +
1
4𝐿𝐵 𝐴−1𝑚 𝐴−𝑇𝐵𝑇𝐿)
−1
. (89)
O sistema (88) tem que ser complementado com condições iniciais adequadas,
��(0) = ��0, ��(0) = ��0 (90)
satisfazendo as condições de compatibilidade.
3.4 Regime forçado de uma consola modelada pelo Método dos Elementos
Discretos considerando o amortecimento viscoso do tipo Rayleigh
Considere-se a consola actuada por uma força 𝐹(𝑡) na extremidade, estudada na secção anterior,
mas agora incluindo um termo de amortecimento viscoso do tipo Rayleigh (Clough, Penzien, 1993).
As equações que regem o movimento não amortecido são
(𝐽 +
1
4𝐿𝐵 𝐴−1𝑚 𝐴−𝑇𝐵𝑇𝐿) �� + 𝐴 𝐾 ��𝑇�� = 𝐹(𝑡)��′. (91)
O amortecimento viscoso é tido em conta pela adição ao membro esquerdo da equação anterior de
um termo do tipo 𝐶�� da forma
𝐶 = 𝑎0 𝐽′ + 𝑎1 𝐾
′, (92)
onde 𝐽′ = 𝐽 +1
4𝐿𝐵 𝐴−1𝑚 𝐴−𝑇𝐵𝑇𝐿 e 𝐾′ = 𝐴 𝐾 ��𝑇, obtendo-se
28
(𝐽 +
1
4𝐿𝐵 𝐴−1𝑚 𝐴−𝑇𝐵𝑇𝐿) �� + 𝐶�� + 𝐴 𝐾 ��𝑇�� = 𝐹(𝑡)��′. (93)
Os coeficientes reais 𝑎0 e 𝑎1 são calculados por forma a assegurar factores de amortecimento 𝜉𝑎 e 𝜉𝑏
em dois modos de vibração naturais. Sendo 𝑝𝑖 as frequências angulares naturais não amortecidas do
sistema, isto é
{𝑝1, … , 𝑝𝑁−1} = {𝑝: det (𝑝2𝐽′ + 𝐾′) = 0}, (94)
todas reais positivas, os coeficientes 𝑎0 e 𝑎1 são dados por
{𝑎0𝑎1} =
2𝑝𝑎𝑝𝑏
𝑝𝑏2 − 𝑝𝑎
2{
𝑝𝑏𝜉𝑎 − 𝑝𝑎𝜉𝑏
−𝜉𝑎𝑝𝑏+𝜉𝑏𝑝𝑎
} . (95)
As frequências angulares 𝑝𝑎 e 𝑝𝑏 no sistema (95) correspondem aos factores de amortecimento 𝜉𝑎 e
𝜉𝑏 que se pretendem impor respectivamente no 𝑎-ésimo e 𝑏-ésimo modos (Clough, Penzien, 1993).
3.5 Consideração de uma fenda numa consola modelada pelo Método dos
Elementos Discretos
Até aqui assumiu-se uma viga em consola sem qualquer descontinuidade ao longo do seu
comprimento, isto é, uma viga não danificada que tem um comportamento dito linear. No entanto, é
importante estudar que alterações ocorrem com o aparecimento de uma fenda no vão da viga, sendo
então esperado um comportamento não-linear da mesma. É possível detectar a existência de fendas,
e até determinar a sua localização e profundidade, através das variações dos valores e vectores
próprios obtidos. O MED permite, de forma rápida e simples, ter em conta a existência na viga de
uma ou mais fendas com diferentes profundidades.
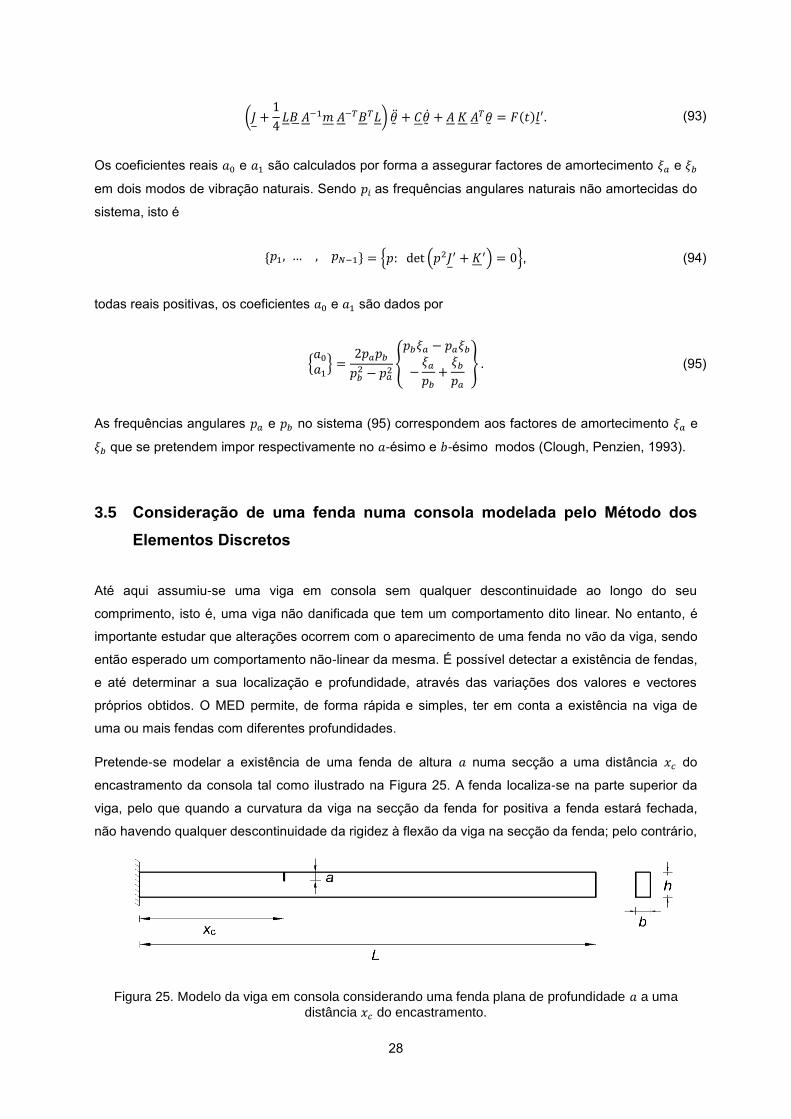
Pretende-se modelar a existência de uma fenda de altura 𝑎 numa secção a uma distância 𝑥𝑐 do
encastramento da consola tal como ilustrado na Figura 25. A fenda localiza-se na parte superior da
viga, pelo que quando a curvatura da viga na secção da fenda for positiva a fenda estará fechada,
não havendo qualquer descontinuidade da rigidez à flexão da viga na secção da fenda; pelo contrário,
Figura 25. Modelo da viga em consola considerando uma fenda plana de profundidade 𝑎 a uma
distância 𝑥𝑐 do encastramento.

29
quando a curvatura da viga na secção da fenda for negativa, a fenda estará aberta e a rigidez de
flexão da viga apresentará uma descontinuidade. Temos portanto uma fenda que se designa por
“breathing crack” à qual corresponde um sistema em que a rigidez evolui com o tempo, dependendo
da resposta instantânea. Admitiremos uma fenda de geometria rectangular em que a altura 𝑎 da
fenda é igual em toda a largura 𝑏 da secção rectangular, como ilustrado nas Figuras 26 e 27.
Figura 26. Perspectiva de um trecho da viga em
consola onde se localiza a fenda plana de altura 𝑎
e largura 𝑏.
Figura 27. Dimensões da fenda.
Vista lateral.
Assumiremos também que a espessura da fenda é desprezável face à sua altura e que a fenda não
se propaga. Por exemplo, no vértice da fenda assume-se a existência de um pequeno canal circular
que reduz o factor de concentração das tensões por forma a que, para as amplitudes de oscilação da
consola, a tensão na extremidade da fenda se mantenha em valores toleráveis e não haja lugar a
propagação.
Uma vez que a consola será modelada pelo MED há que posicionar a fenda numa secção que separe
dois blocos consecutivos, como se indica na Figura 28. Isto implica que a rigidez da mola que
Figura 28. Modelo de elementos discretos da viga em consola considerando uma fenda.

30
coincide com a secção da fenda deva ser modificada quando a curvatura tiver aí o sinal que implique
a abertura da fenda. A rigidez da mola afectada pela fenda é determinada com base na referência
(Okamura et al., 1969). Quando a curvatura for positiva a fenda estará fechada, e a mola localizada
na secção da fenda e todas as outras molas terão uma rigidez
𝑘𝑐 =
𝐸𝐼
𝑙 (96)
em que 𝑙 é o comprimento de cada bloco ou, se se preferir, o comprimento de influência da n-ésima
mola, que é igual à soma dos comprimentos dos dois meios blocos (de comprimento 𝑙/2), um de cada
lado da mola. De acordo com o artigo atrás citado, se a fenda estiver aberta a rigidez da mola a
considerar será
𝑘𝑐 =
1
𝑙𝐸𝐼+72𝐸𝑏ℎ2
𝐹 ( 𝑎ℎ), (97)
expressão obtida da equação (20) de (Okamura et al., 1969) fazendo 𝑙∗ = 𝑙 e 𝜈 = 0 por assumirmos
um estado plano de tensão. A expressão de 𝐹 ( 𝑎
ℎ) é dada pela equação (21) do mesmo artigo:
𝐹 ( 𝑎
ℎ) = 1.98 (
𝑎
ℎ)2
− 3.277 (𝑎
ℎ)3
+ 14.43 (𝑎
ℎ)4
− 31.26 (𝑎
ℎ)5
+ 63.56 (𝑎
ℎ)6
− 103.36 (𝑎
ℎ)7
+ 147.52 (𝑎
ℎ)8
− 127.69 (𝑎
ℎ)9
+ 61.50 (𝑎
ℎ)10
. (98)
Quando não existir fenda 𝑎
ℎ= 0 pelo que o valor de 𝐹 será zero, consequentemente a expressão (97)
fornece 𝑘𝑐 =𝐸𝐼
𝑙.
A matriz de rigidez a considerar num modelo de elementos discretos uniforme (todos os blocos, à
excepção dos de extremidade, de comprimento 𝑙 =𝐿
𝑁−1) será então a matriz diagonal de dimensão 𝑁-
1 definida por
𝐾 = diag(𝐸𝐼
𝑙, … ,𝐸𝐼
𝑙,
1
𝑙𝐸𝐼+72𝐸𝑏ℎ2
𝐹 ( 𝑎ℎ),𝐸𝐼
𝑙, … ,
𝐸𝐼
𝑙) (99)
ou
𝐾 =𝐸𝐼
𝑙diag(1,… , 1,
𝑙𝐸𝐼
𝑙𝐸𝐼+72𝐸𝑏ℎ2
𝐹 ( 𝑎ℎ), 1, … ,1) (100)
Em (100) o único elemento não unitário da matriz diagonal que está multiplicado por 𝐸𝐼
𝑙 representa o
quociente entre a flexibilidade de um troço de viga de comprimento 𝑙 sem fenda (ou,

31
equivalentemente, com a fenda fechada) e a flexibilidade de um troço de igual comprimento com a
fenda, de altura 𝑎 a meio do troço, aberta (ver as Figuras 29 e 30).
Figura 29. Fenda fechada,
em que 𝜃𝑙 + 𝜃𝑟 = 𝑀𝑙
𝐸𝐼
Figura 30. Fenda aberta, em que
𝜃𝑙 + 𝜃𝑟 = 𝑀(𝑙
𝐸𝐼+72
𝐸𝑏ℎ2𝐹 ( 𝑎
ℎ))
Implementaram-se computacionalmente três modelos da viga em consola:
3.6 Resultados
A Tabela 3 contém as propriedades físicas e geométricas da viga em consola a modelar e simular.
Tabela 3. Propriedades geométricas e físicas da viga em consola.
Propriedades geométricas
𝑏 [m] 0.06
ℎ [m] 0.22
𝐿 [m] 8.0
Propriedades do material
𝐸 [Pa] 210 × 109
𝜌 [kg/m3] 7800
3.6.1 Frequências naturais
Na Tabela 4 apresentam-se as frequências naturais da viga em consola sem fenda obtidas de forma
analítica (frequências exactas) e usando o MED (frequências aproximadas), para um número
crescente de blocos (𝑁 = 24, 48, 96, 192, 384).
Ausência de fenda (a viga exibe comportamento linear);
Fenda permanentemente aberta (a viga também exibe comportamento linear);
Fenda que abre e fecha no decorrer do tempo - “breathing crack” (a viga exibe
comportamento não linear).

32
Tabela 4. Frequências naturais exactas e aproximadas da viga em consola.
Modo Frequências exactas (𝑝𝑒)
(rad. s−1)
Frequências aproximadas (𝑝𝑎) (rad. s−1)
𝑁 = 24 𝑁 = 48 𝑁 = 96 𝑁 = 192 𝑁 = 384
1 18,104 17,346 17,724 17,912 18,007 18,054
2 113,453 108,727 111,006 112,165 112,750 113,043
3 317,673 304,301 310,459 313,645 315,2645 316,081
4 622,512 595,649 607,284 613,403 616,540 618,127
5 1029,057 982,876 1001,471 1011,388 1016,509 1019,110
6 1537,232 1464,475 1491,506 1506,047 1513,600 1517,449
A Figura 31 representa o quociente entre as cinco primeiras frequências calculadas pelo programa
desenvolvido em MATLAB e as cinco primeiras frequências naturais exactas homólogas, em função
do número de blocos (os mesmos indicados na tabela acima).
Figura 31. Convergência das cinco primeiras frequências da viga em consola em função do número
de blocos (𝑁). -----: 𝑝1𝑎/𝑝1𝑒 -----: 𝑝2𝑎/𝑝2𝑒 -----: 𝑝3𝑎/𝑝3𝑒 -----: 𝑝4𝑎/𝑝4𝑒 -----: 𝑝5𝑎/𝑝5𝑒 .
A comparação entre as Tabelas 4 e 2 ou entre as Figuras 31 e 14 permite concluir de imediato que as
frequências convergem muito mais lentamente no caso da consola do que no caso da viga
simplesmente apoiada (estudada no capítulo anterior). De facto, no caso da viga em consola, apenas
se conseguem aproximações das primeiras três frequências exactas com um erro inferior a 0.5%, se

33
forem utilizados pelo menos 384 blocos. Relembre-se que para a viga simplesmente apoiada, e para
se obter a mesma limitação do erro nas três primeiras frequências, eram necessários apenas 12
blocos. Esta evidente diferença entre as taxas de convergência dos modelos deve-se provavelmente
ao facto de os modos de vibração de uma consola não serem as funções trigonométricas circulares
simples da viga simplesmente apoiada, como veremos seguidamente.
3.6.2 Modos de vibração da viga sem fenda
As Figuras 32 e 33 que se seguem representam os cinco primeiros modos exactos normalizados e os
cinco primeiros modos obtidos através do modelo, também normalizados. À partida, depois do que foi
concluído acima, usando 12 blocos (à semelhança do que foi feito para o modelo de viga
simplesmente apoiada) obter-se-á uma aproximação muito imprecisa dos modos de vibração, como
se observa nas Figuras 32 e 33.
É evidente que para o modelo da consola uma malha com 12 blocos é insuficiente, uma vez que nem
o primeiro modo é reproduzido com rigor. Incrementando o número de blocos para 96 blocos, obtêm-
se os gráficos das Figuras 34 e 35.
Figura 32. Primeiro, segundo e terceiro modos de vibração da viga em consola (12 blocos).
___: 1º modo exacto; o: 1º modo calculado; ___: 2º modo exacto; o: 2º modo calculado
___: 3º modo exacto; o: 3º modo calculado.

34
Figura 33. Quarto e quinto modos de vibração da viga em consola (12 blocos).
___: 4º modo exacto; o: 4º modo calculado; ___: 5º modo exacto; o: 5º modo calculado.
Figura 34. Primeiro, segundo e terceiro modos de vibração da viga em consola (96 blocos).
___: 1º modo exacto; o: 1º modo calculado; ___: 2º modo exacto; o: 2º modo calculado
___: 3º modo exacto; o: 3º modo calculado.

35
Ainda que sem uma precisão excelente, com 96 blocos já é possível reproduzir suficientemente bem
os três primeiros modos de vibração. Obviamente, continuando-se a incrementar o número de blocos
obter-se-ão modos mais correctos, mas a grande melhoria obtida para as cinco primeiras frequências
e modos ao passar de 12 para 96 blocos dificilmente se repetirá se se aumentar mais o número de
blocos. Isto é, a melhoria das aproximações não é proporcional ao grau de refinamento da malha.
Figura 35. Quarto e quinto modos de vibração da viga em consola (96 blocos).
___: 4º modo exacto; o: 4º modo calculado; ___: 5º modo exacto; o: 5º modo calculado.
3.6.3 Frequências de vibração da viga em consola com fenda
Os gráficos das Figuras 36, 37 e 38 mostram a alteração nas três primeiras frequências naturais da
viga em consola em função da profundidade da fenda, para uma profundidade crescente de 5, 10, 20,
30, 40 e 50% da altura da viga num modelo de 40 blocos. Para se perceber o impacto que a
localização da fenda tem na diminuição das frequências próprias da consola, traçaram-se três
gráficos: no primeiro a fenda dista 𝑙𝑓 = 10,26 cm da extremidade encastrada (Figura 36), no segundo
a fenda dista 𝑙𝑓 = 90,31 cm (Figura 37) e no terceiro a fenda dista 𝑙𝑓 = 2,15m (Figura 38).
Admitindo propriedades da viga iguais às estabelecidas no modelo da secção anterior, verifica-se
que, para uma localização da fenda fixa, as frequências naturais diminuem com o aumento da altura
da fenda. Ora, quando a profundidade da fenda aumenta a rigidez da viga diminui.
Consequentemente, o período de vibração em cada modo aumenta e inversamente a frequência
diminui. Este fenómeno é mais evidente para fendas situadas em regiões onde o respectivo modo
apresenta maior curvatura. Verifica-se portanto que para a viga em consola a existência de uma
fenda perto do encastramento tem maior impacto no comportamento dinâmico da viga para as três
frequências mais baixas (Figura 36) pois é na região do encastramento que as curvaturas de uma

36
consola são maiores. A Figura 37, obtida para uma fenda localizada muito próximo do ponto de
inflexão do 3º modo de vibração, reforça esta conclusão pois observa-se que, neste caso, a 3ª
frequência natural é insensível à profundidade da fenda.
Figura 36. Frequências naturais em função da profundidade de uma fenda localizada à distância 𝑙𝑓 = 10,26 cm contada a partir do encastramento; Modelo com 40 blocos.
---o---: 1ª frequência própria; ---o---: 2ª frequência própria; ---o---: 3ª frequência própria.
Figura 37. Frequências naturais em função da profundidade de uma fenda localizada à distância 𝑙𝑓 = 90,31 cm contada a partir do encastramento; Modelo com 40 blocos.
---o---: 1ª frequência própria; ---o---: 2ª frequência própria; ---o---: 3ª frequência própria.

37
Figura 38. Frequências naturais em função da profundidade de uma fenda localizada à distância 𝑙𝑓 = 2,15 m contada a partir do encastramento; Modelo com 40 blocos.
---o---: 1ª frequência própria; ---o---: 2ª frequência própria; ---o---: 3ª frequência própria.
3.6.4 Evolução dinâmica da oscilação de uma viga em consola com e sem fenda
Nesta secção comparam-se os resultados numéricos obtidos usando o Método dos Elementos
Discretos com os resultados que se podem encontrar no artigo (Loutridis et al., 2005), alguns dos
quais experimentais.
3.6.4.1 Exemplo 1
Com o objectivo de estudar a resposta não linear da viga em consola com fenda, considerou-se um
modelo em Plexiglas com as características indicadas na Tabela 5 (Loutridis et al., 2005).
Tabela 5. Propriedades geométricas e físicas da viga em consola (Loutridis et al., 2005).
Propriedades geométricas
𝑏 [m] 0.02
ℎ [m] 0.02
𝐿 [m] 0.230
Propriedades do material
𝐸 [Pa] 2.5 × 109
𝜌 [kg/m3] 1200
38
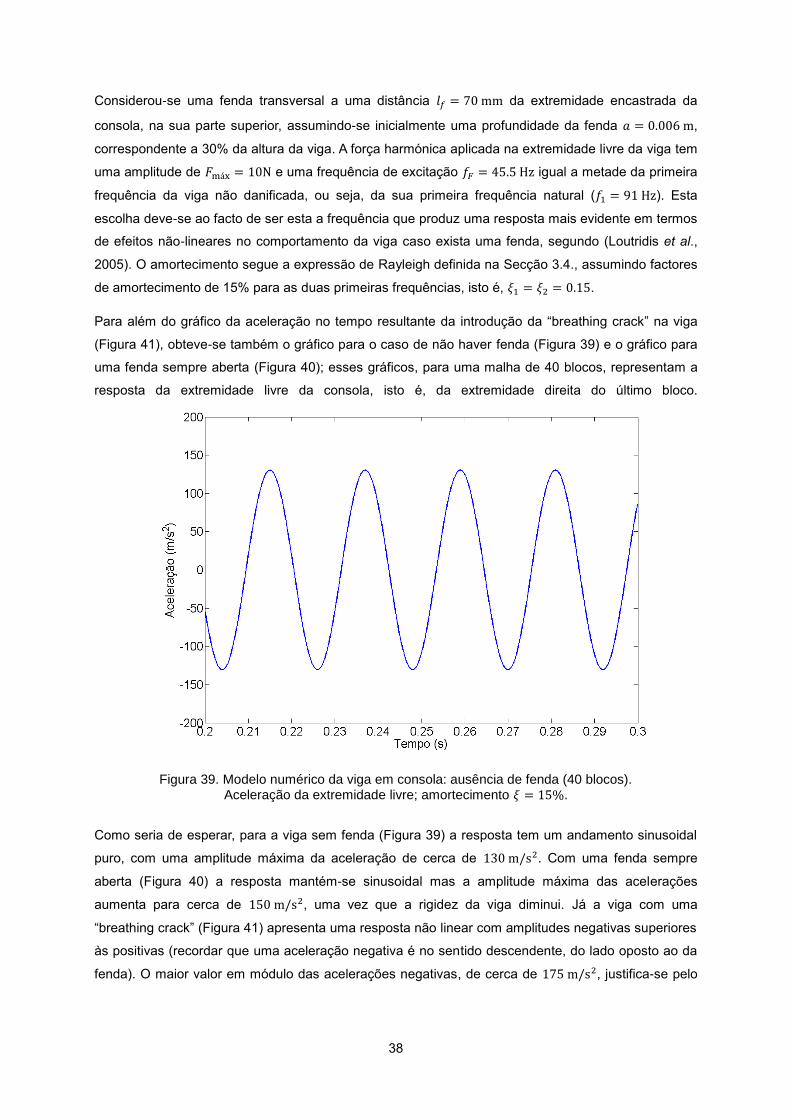
Considerou-se uma fenda transversal a uma distância 𝑙𝑓 = 70 mm da extremidade encastrada da
consola, na sua parte superior, assumindo-se inicialmente uma profundidade da fenda 𝑎 = 0.006 m,
correspondente a 30% da altura da viga. A força harmónica aplicada na extremidade livre da viga tem
uma amplitude de 𝐹máx = 10N e uma frequência de excitação 𝑓𝐹 = 45.5 Hz igual a metade da primeira
frequência da viga não danificada, ou seja, da sua primeira frequência natural (𝑓1 = 91 Hz). Esta
escolha deve-se ao facto de ser esta a frequência que produz uma resposta mais evidente em termos
de efeitos não-lineares no comportamento da viga caso exista uma fenda, segundo (Loutridis et al.,
2005). O amortecimento segue a expressão de Rayleigh definida na Secção 3.4., assumindo factores
de amortecimento de 15% para as duas primeiras frequências, isto é, 𝜉1 = 𝜉2 = 0.15.
Para além do gráfico da aceleração no tempo resultante da introdução da “breathing crack” na viga
(Figura 41), obteve-se também o gráfico para o caso de não haver fenda (Figura 39) e o gráfico para
uma fenda sempre aberta (Figura 40); esses gráficos, para uma malha de 40 blocos, representam a
resposta da extremidade livre da consola, isto é, da extremidade direita do último bloco.
Figura 39. Modelo numérico da viga em consola: ausência de fenda (40 blocos). Aceleração da extremidade livre; amortecimento 𝜉 = 15%.
Como seria de esperar, para a viga sem fenda (Figura 39) a resposta tem um andamento sinusoidal
puro, com uma amplitude máxima da aceleração de cerca de 130 m/s2. Com uma fenda sempre
aberta (Figura 40) a resposta mantém-se sinusoidal mas a amplitude máxima das acelerações
aumenta para cerca de 150 m/s2, uma vez que a rigidez da viga diminui. Já a viga com uma
“breathing crack” (Figura 41) apresenta uma resposta não linear com amplitudes negativas superiores
às positivas (recordar que uma aceleração negativa é no sentido descendente, do lado oposto ao da
fenda). O maior valor em módulo das acelerações negativas, de cerca de 175 m/s2, justifica-se pelo

39
Figura 40. Modelo numérico da viga em consola: fenda sempre aberta 𝑎 = 0.3ℎ (40 blocos).
Aceleração da extremidade livre; amortecimento 𝜉 = 15%.
Figura 41. Modelo numérico da viga em consola: "breathing crack" 𝑎 = 0.3ℎ (40 blocos).
Aceleração da extremidade livre; amortecimento 𝜉 = 15%.
facto de a fenda estar fechada quando as acelerações �� forem positivas e estar aberta quando as
acelerações �� forem negativas, sendo que nesta última situação a viga perde rigidez e as
acelerações aumentam. A irregularidade no traçado do gráfico, nomeadamente para valores de
acelerações próximas de zero deve-se à mudança do estado da fenda. Esta ocorre quando a viga
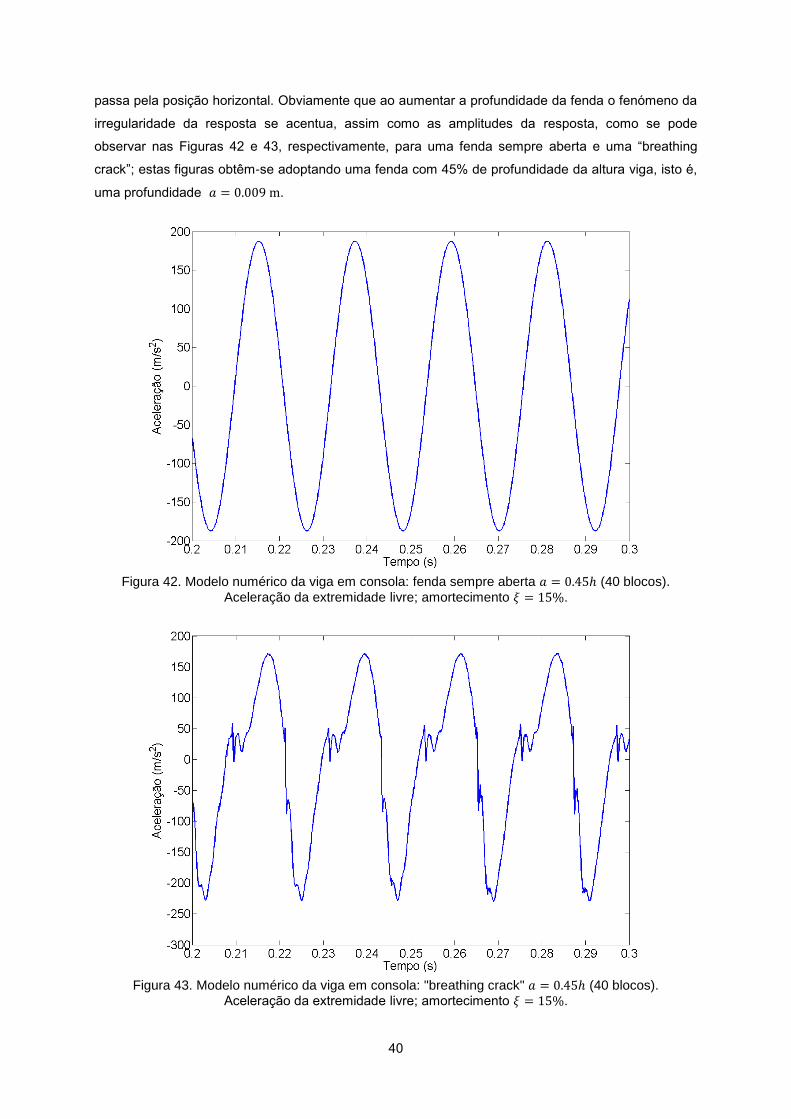
40
passa pela posição horizontal. Obviamente que ao aumentar a profundidade da fenda o fenómeno da
irregularidade da resposta se acentua, assim como as amplitudes da resposta, como se pode
observar nas Figuras 42 e 43, respectivamente, para uma fenda sempre aberta e uma “breathing
crack”; estas figuras obtêm-se adoptando uma fenda com 45% de profundidade da altura viga, isto é,
uma profundidade 𝑎 = 0.009 m.
Figura 42. Modelo numérico da viga em consola: fenda sempre aberta 𝑎 = 0.45ℎ (40 blocos).
Aceleração da extremidade livre; amortecimento 𝜉 = 15%.
Figura 43. Modelo numérico da viga em consola: "breathing crack" 𝑎 = 0.45ℎ (40 blocos).
Aceleração da extremidade livre; amortecimento 𝜉 = 15%.
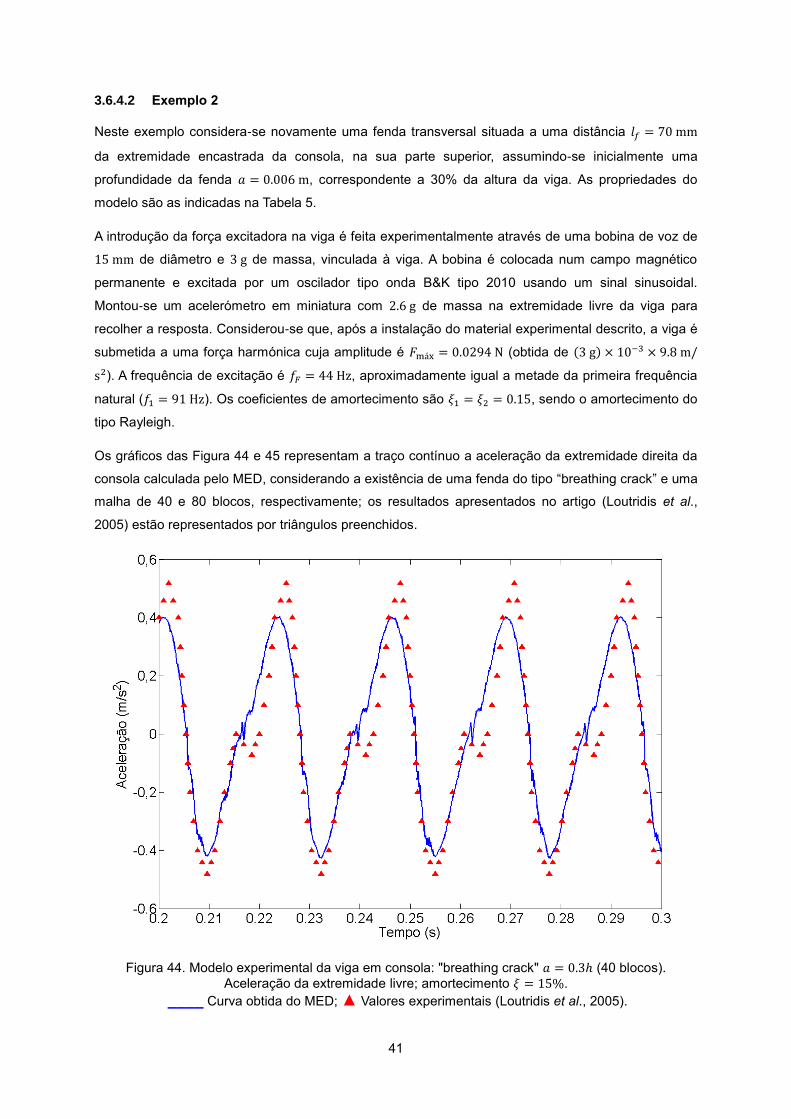
41
3.6.4.2 Exemplo 2
Neste exemplo considera-se novamente uma fenda transversal situada a uma distância 𝑙𝑓 = 70 mm
da extremidade encastrada da consola, na sua parte superior, assumindo-se inicialmente uma
profundidade da fenda 𝑎 = 0.006 m, correspondente a 30% da altura da viga. As propriedades do
modelo são as indicadas na Tabela 5.
A introdução da força excitadora na viga é feita experimentalmente através de uma bobina de voz de
15 mm de diâmetro e 3 g de massa, vinculada à viga. A bobina é colocada num campo magnético
permanente e excitada por um oscilador tipo onda B&K tipo 2010 usando um sinal sinusoidal.
Montou-se um acelerómetro em miniatura com 2.6 g de massa na extremidade livre da viga para
recolher a resposta. Considerou-se que, após a instalação do material experimental descrito, a viga é
submetida a uma força harmónica cuja amplitude é 𝐹máx = 0.0294 N (obtida de (3 g) × 10−3 × 9.8 m/
s2). A frequência de excitação é 𝑓𝐹 = 44 Hz, aproximadamente igual a metade da primeira frequência
natural (𝑓1 = 91 Hz). Os coeficientes de amortecimento são 𝜉1 = 𝜉2 = 0.15, sendo o amortecimento do
tipo Rayleigh.
Os gráficos das Figura 44 e 45 representam a traço contínuo a aceleração da extremidade direita da
consola calculada pelo MED, considerando a existência de uma fenda do tipo “breathing crack” e uma
malha de 40 e 80 blocos, respectivamente; os resultados apresentados no artigo (Loutridis et al.,
2005) estão representados por triângulos preenchidos.
Figura 44. Modelo experimental da viga em consola: "breathing crack" 𝑎 = 0.3ℎ (40 blocos).
Aceleração da extremidade livre; amortecimento 𝜉 = 15%.
____ Curva obtida do MED; ▲ Valores experimentais (Loutridis et al., 2005).

42
Figura 45. Modelo experimental da viga em consola: "breathing crack" 𝑎 = 0.3ℎ (80 blocos).
Aceleração da extremidade livre; amortecimento 𝜉 = 15%.
____ Curva obtida do MED; ▲ Valores experimentais (Loutridis et al., 2005).
Da observação das Figuras 44 e 45 verifica-se que o refinamento de 40 para 80 blocos já não produz
uma melhoria significativa dos resultados. A aproximação conseguida dos resultados experimentais é
bastante boa, para qualquer uma das malhas utilizadas, conseguindo-se reproduzir a irregularidade
que ocorre para acelerações próximas de zero devido à mudança do estado da fenda.
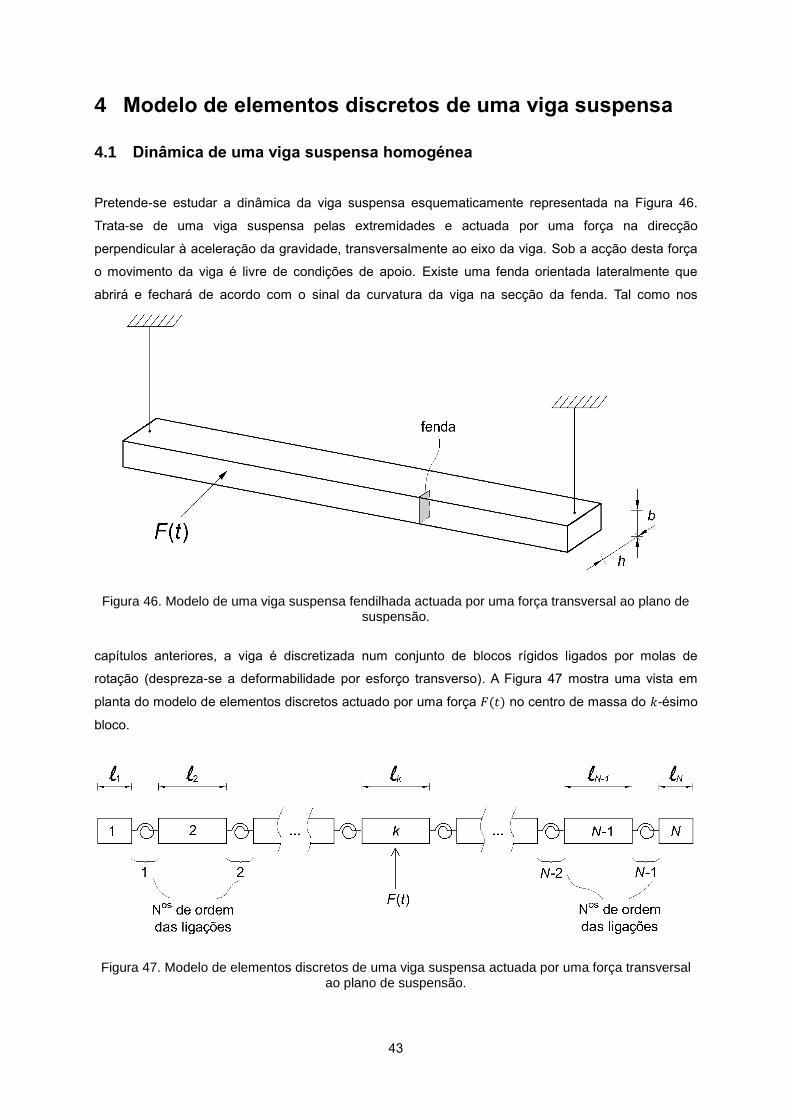
43
4 Modelo de elementos discretos de uma viga suspensa
4.1 Dinâmica de uma viga suspensa homogénea
Pretende-se estudar a dinâmica da viga suspensa esquematicamente representada na Figura 46.
Trata-se de uma viga suspensa pelas extremidades e actuada por uma força na direcção
perpendicular à aceleração da gravidade, transversalmente ao eixo da viga. Sob a acção desta força
o movimento da viga é livre de condições de apoio. Existe uma fenda orientada lateralmente que
abrirá e fechará de acordo com o sinal da curvatura da viga na secção da fenda. Tal como nos
Figura 46. Modelo de uma viga suspensa fendilhada actuada por uma força transversal ao plano de suspensão.
capítulos anteriores, a viga é discretizada num conjunto de blocos rígidos ligados por molas de
rotação (despreza-se a deformabilidade por esforço transverso). A Figura 47 mostra uma vista em
planta do modelo de elementos discretos actuado por uma força 𝐹(𝑡) no centro de massa do 𝑘-ésimo
bloco.
Figura 47. Modelo de elementos discretos de uma viga suspensa actuada por uma força transversal ao plano de suspensão.

44
Os blocos das extremidades têm um comprimento igual a metade do comprimento dos blocos
intermédios, tal como ilustrado na Figura 48. O comprimento dos blocos intermédios será 𝑙𝑛 =𝐿
𝑁−1,
Figura 48. Modelo de segmentação da viga suspensa.
em que 𝐿 é o comprimento da barra e 𝑁 é o número total de blocos do modelo de elementos
discretos. A massa e o momento central de inércia de cada bloco intermédio são respectivamente
𝑚𝑛 = 𝜌𝑏ℎ𝑙𝑛 e 𝐽𝑛 =𝜌𝑏ℎ𝑙𝑛
12(ℎ2 + 𝑙𝑛
2). Os blocos extremos têm uma massa e um momento central de
inércia respectivamente iguais a 𝑚𝑒 = 𝜌𝑏ℎ𝑙𝑛
2 e 𝐽𝑒 =
𝜌𝑏ℎ(𝑙𝑛 2⁄ )
12(ℎ2 + (
𝑙𝑛
2)2
).
De seguida aplica-se o teorema de d’Alembert aos vários tipos de blocos em presença na viga para
obter as equações que regem o seu movimento livre no plano perpendicular à aceleração da
gravidade. As duas equações do movimento do bloco da extremidade esquerda são (ver Figura 49)
𝑚1��1 = 𝑆1,
𝐽1��1 = 𝑀1 +𝑙12𝑆1.
(101)
Figura 49. Modelo do bloco da extremidade esquerda da viga suspensa.
Na Figura 50 ilustra-se a aplicação do teorema de d’Alembert a um bloco intermédio genérico. As
equações que regem o seu movimento de translação e rotação são
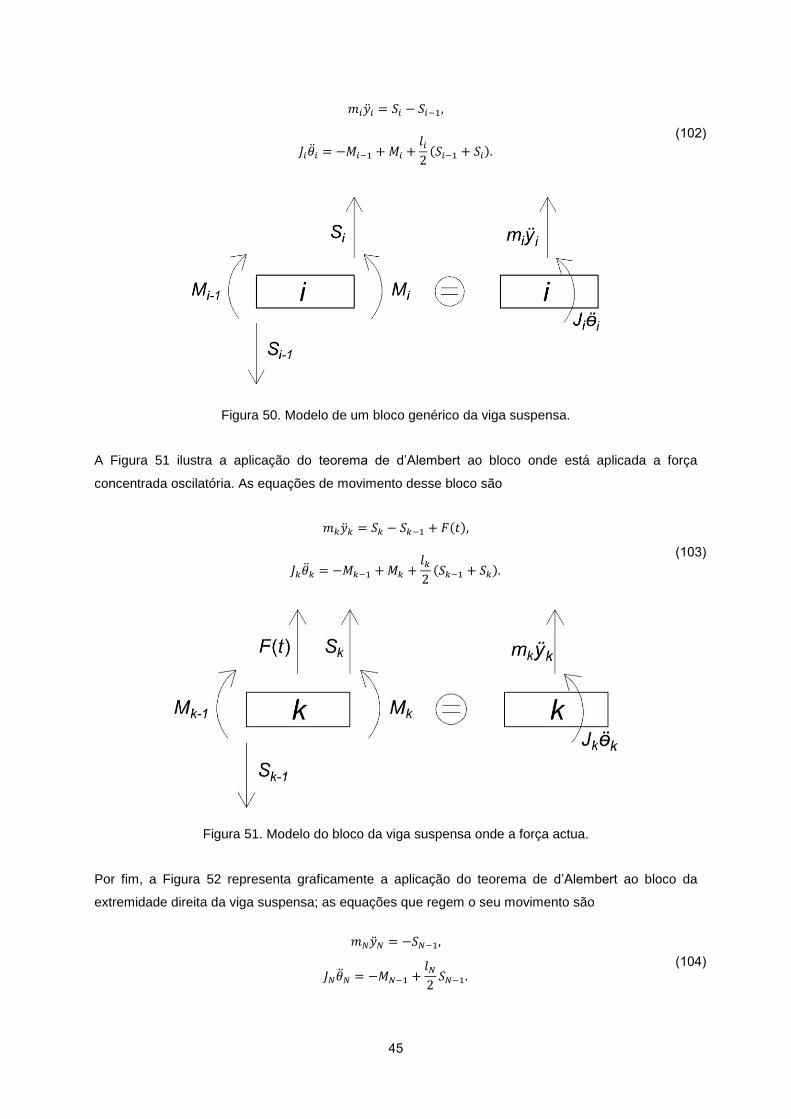
45
𝑚𝑖��𝑖 = 𝑆𝑖 − 𝑆𝑖−1,
𝐽𝑖��𝑖 = −𝑀𝑖−1 +𝑀𝑖 +𝑙𝑖2(𝑆𝑖−1 + 𝑆𝑖).
(102)
Figura 50. Modelo de um bloco genérico da viga suspensa.
A Figura 51 ilustra a aplicação do teorema de d’Alembert ao bloco onde está aplicada a força
concentrada oscilatória. As equações de movimento desse bloco são
𝑚𝑘��𝑘 = 𝑆𝑘 − 𝑆𝑘−1 + 𝐹(𝑡),
𝐽𝑘��𝑘 = −𝑀𝑘−1 +𝑀𝑘 +𝑙𝑘2(𝑆𝑘−1 + 𝑆𝑘).
(103)
Figura 51. Modelo do bloco da viga suspensa onde a força actua.
Por fim, a Figura 52 representa graficamente a aplicação do teorema de d’Alembert ao bloco da
extremidade direita da viga suspensa; as equações que regem o seu movimento são
𝑚𝑁��𝑁 = −𝑆𝑁−1,
𝐽𝑁��𝑁 = −𝑀𝑁−1 +𝑙𝑁2𝑆𝑁−1.
(104)
46
Figura 52. Modelo do bloco da extremidade direita da viga suspensa.
O sistema de equações que rege o movimento transversal do modelo é
[ 𝑚1 0 ⋯0 𝑚2 0⋮ 0 ⋱
⋯ 0⋮
⋮0 ⋯
𝑚𝑁−1 0
0 𝑚𝑁]
{
��1��2⋮
��𝑁−1��𝑁 }
==
[ 1 0 ⋯−1 1 00 −1 1
0⋮
0 ⋯−1 10 −1]
{
𝑆1𝑆2⋮
𝑆𝑁−1𝑆𝑁 }
+ 𝐹(𝑡)
{
0⋮010⋮0}
, (105)
em que a matriz que premultiplica o vector dos esforços transversos é uma matriz rectangular com 𝑁
linhas e 𝑁-1 colunas. Definindo
𝑚 = diag(𝑚2, ⋯ ,𝑚𝑁) ∈ ℝ(𝑁−1)×(𝑁−1) (106)
e
𝐴 =
[ 1 −1 00 1 −1⋮
⋯ 0⋮
0 ⋯1 −10 1 ]
∈ ℝ(𝑁−1)×(𝑁−1), (107)
o sistema (105) pode escrever-se na forma
{
𝑚1��1 = 𝑆1𝑚�� = −𝐴�� + 𝐹(𝑡)��𝑘−1
(108a)
(108b)
em que
�� = {𝑦2 𝑦3⋯ 𝑦𝑁}
𝑇 ,
��𝑘−1 = {0 ⋯ 0 1 0 ⋯0}𝑇 , (1 na (𝑘 − 1) − ésima posição).
(109)
Chama-se a atenção para o facto de a matriz 𝐴 definida em (107) ser diferente da matriz de igual
nome definida em (55) a propósito da viga em consola.

47
O sistema de equações que rege o movimento angular do modelo é
[ 𝐽1 0 ⋯0 𝐽2 0⋮ 0 ⋱
⋯ 0⋮
⋮0 ⋯
𝐽𝑁−1 0
0 𝐽𝑁]
{
��1��2⋮
��𝑁−1��𝑁 }
=
[ 1 0−1 1 00 −1 1
⋯ 0⋮
⋮
0 ⋯−1 10 −1]
{
𝑀1𝑀2⋮
𝑀𝑁−1}
+
+1
2
[ 𝑙1 0 ⋯0 𝑙2 0⋮ 0 ⋱
0⋮
0 ⋯
𝑙𝑁−1 0
0 𝑙𝑁]
[ 1 0 01 1 00 1 1
⋯ 0⋮
0 ⋯1 10 1 ]
{
𝑆1𝑆2⋮
𝑆𝑁−1}
.
(110)
As matrizes que premultiplicam os vectores dos esforços transversos e dos momentos flectores têm
𝑁 linhas e apenas 𝑁-1 colunas. O sistema anterior pode ser escrito na forma compacta seguinte
𝐽�� = −𝐷𝑇�� +
1
2𝐿����. (111)
em que �� ∈ ℝ(𝑁−1)×𝑁 e �� ∈ ℝ𝑁×(𝑁−1).
As equações constitutivas são dadas por
{
𝑀1
⋮
𝑀𝑁−1}
=
[ 𝐾1 0
⋱
0 𝐾𝑁−1]
[ −1 1 0 00 −1 1 ⋮
⋮ −1 1 00 ⋯ 0 −1 1 ]
{
𝜃1𝜃2⋮
𝜃𝑁−1𝜃𝑁 }
(112)
ou, matricialmente,
�� = 𝐾����.
(113)
A compatibilidade dos deslocamentos transversais dos blocos do modelo conduz às seguintes 𝑁 − 1
equações
{
𝑦2 = 𝑦1 +
𝑙12𝜃1 +
𝑙22𝜃2
𝑦3 = 𝑦2 +𝑙22𝜃2 +
𝑙32𝜃3
⋮
𝑦𝑁 = 𝑦𝑁−1 +𝑙𝑁−12𝜃𝑁−1 +
𝑙𝑁2𝜃𝑁
(114)
que se podem agrupar matricialmente na forma

48
[ −1 1 0 00 −1 1 0
⋮⋮0 ⋯ −1 1 00 ⋯ 0 −1 1 ]
{
𝑦1𝑦2⋮
𝑦𝑁−1𝑦𝑁 }
=
=1
2
[ 1 1 0 00 1 1 0
⋮⋮0 ⋯ 1 1 00 ⋯ 0 1 1 ]
[ 𝑙1 0 ⋯0 𝑙2 0⋮ 0 ⋱
0⋮
0 ⋯
𝑙𝑁−1 0
0 𝑙𝑁]
{
𝜃1𝜃2⋮
𝜃𝑁−1𝜃𝑁 }
(115)
em que a matriz que, no segundo membro, premultiplica a matriz diagonal dos comprimentos dos
blocos é a transposta da matriz �� definida em (110)-(111). Definindo agora
��1′ = {1 0 ⋯0}𝑇 ∈ ℝ𝑁−1,
(116)
o sistema (114) pode ser reescrito na forma
[ 1 0 0−1 1 00 −1 1 ⋮
⋯ 00 −1 1 ]
{
𝑦2𝑦3⋮
𝑦𝑁−1𝑦𝑁 }
=
=1
2
[ 1 1 0 00 1 1 0
⋮⋮0 ⋯ 1 1 00 ⋯ 0 1 1 ]
[ 𝑙1 0 ⋯0 𝑙2 0⋮ 0 ⋱
0⋮
0 ⋯
𝑙𝑁−1 0
0 𝑙𝑁]
{
𝜃1𝜃2⋮
𝜃𝑁−1𝜃𝑁 }
+
{
10⋮
0 }
𝑦1
(117)
que é equivalente a
𝐴𝑇�� =1
2𝐵𝑇𝐿�� + 𝑦1��1
′ . (118)
Derivando (118) duas vezes em ordem ao tempo obtém-se
𝐴𝑇 �� =1
2𝐵𝑇𝐿�� + ��1��1
′ . (119)
Resolvendo (108b) em ordem a �� obtém-se
�� = −𝐴−1𝑚�� + 𝐹(𝑡)𝐴−1��𝑘−1. (120)
Por outro lado, resolvendo (119) em ordem a �� chega-se a
�� =1
2𝐴−𝑇𝐵𝑇𝐿�� + ��1𝐴
−𝑇��1′ . (121)

49
A substituição de (121) em (120) permite obter
�� = −𝐴−1𝑚(
1
2𝐴−𝑇𝐵𝑇𝐿�� + ��1𝐴
−𝑇��1′ ) + 𝐹(𝑡)𝐴−1��𝑘−1
= −1
2𝐴−1𝑚𝐴−𝑇𝐵𝑇𝐿�� − ��1𝐴
−1𝑚𝐴−𝑇��1′ + 𝐹(𝑡)𝐴−1��𝑘−1.
(122)
Finalmente, substituindo (113) e (122) em (111) obtém-se
(𝐽 +1
4𝐿𝐵 𝐴−1𝑚 𝐴−𝑇𝐵𝑇𝐿) �� +
1
2𝐿𝐵 𝐴−1𝑚 𝐴−𝑇��1
′ ��1 = −𝐷𝑇𝐾 𝐷�� +
1
2𝐹(𝑡)𝐿𝐵 𝐴−1��𝑘−1. (123)
A equação vectorial anterior terá que ser complementada com a equação (108a). Resolvendo a
primeira das equações de (110) em ordem a 𝑆1 obtém-se
𝑆1 =2
𝑙1(𝐽1��1 −𝑀1). (124)
Por outro lado, uma vez que 𝑀1 = 𝐾1(𝜃2 − 𝜃1), obtém-se
𝑆1 =2
𝑙1(𝐽1��1 − 𝐾1(𝜃2 − 𝜃1) ). (125)
A substituição do resultado anterior em (108a) conduz a
−2𝐽1𝑙1��1 +𝑚1��1 =
2𝐾1𝑙1𝜃1 −
2𝐾1𝑙1𝜃2. (126)
Observando que
𝜃1 = ��1
𝑇�� (127)
com
��1 = {1 0 ⋯ 0}
𝑇 ∈ ℝ𝑁 , (128)
então (126) é equivalente a
−2𝐽1𝑙1��1𝑇 �� + 𝑚1��1 =
2𝐾1𝑙1𝜃1 −
2𝐾1𝑙1𝜃2. (129)
O sistema {(123),(129)} é portanto o sistema que rege a dinâmica da viga suspensa. Agrupando
essas 𝑁 + 1 equações obtém-se
[ 𝐽 +
1
4𝐿𝐵 𝐴−1𝑚 𝐴−𝑇𝐵𝑇𝐿
1
2𝐿𝐵 𝐴−1𝑚 𝐴−𝑇��1
′
−2𝐽1𝑙1��1𝑇 𝑚1 ]
{��
��1
} = [
−𝐷𝑇𝐾 𝐷 0
2𝐾1𝑙1��2𝑇 0
] {
��
𝑦1
} + {
1
2𝐹(𝑡)𝐿𝐵 𝐴−1��𝑘−1
0
} (130)

50
em que ��2 = { 1 −1 0 ⋯ 0 }𝑇 ∈ ℝ𝑁. Chama-se a atenção para o facto de, na matriz dos
coeficientes do membro esquerdo da equação (130), coexistirem os vectores ��1′ e ��1 das Equações
(116) e (128), respectivamente. O sistema (130) será integrado no tempo usando um conjunto de
condições iniciais apropriado.
O amortecimento é introduzido adicionando ao membro esquerdo da equação (130) o termo
𝐶 {��𝑦1} (131)
em que 𝐶 é definida segundo a Equação (92) na qual, agora,
e
𝐽′ =
[ 𝐽 +
1
4𝐿𝐵 𝐴−1𝑚 𝐴−𝑇𝐵𝑇𝐿
1
2𝐿𝐵 𝐴−1𝑚 𝐴−𝑇��1
′
−2𝐽1𝑙1��1𝑇 𝑚1 ]
(132)
𝐾′ = [
𝐷𝑇𝐾 𝐷 0
−2𝐾1𝑙1��2𝑇 0
], (133)
sendo os coeficientes 𝑎0 e 𝑎1 novamente dados por (95). Não confundir o escalar 𝑎1 usado no cálculo
da matriz de amortecimento com o vector ��1 definido em (128).
As frequências angulares naturais exactas de uma viga livre suspensa são dadas pela expressão (40)
(Rao, 2004) onde
𝛽1𝐿 = 4.730041, 𝛽2𝐿 = 7.853205, 𝛽3𝐿 = 10.995608, 𝛽4𝐿 = 14.137165, 𝛽5𝐿 = 17.278759,
são as cinco primeiras raízes da equação
cos(𝛽𝑛𝐿) cosh(𝛽𝑛𝐿) − 1 = 0. (134)
Os modos de vibração exactos, por sua vez, são dados pelas funções
𝑊𝑛(𝑥) = 𝐶𝑛 [sin(𝛽𝑛𝑥) + sinh(𝛽𝑛𝑥) + (
sin(𝛽𝑛𝐿) − sinh(𝛽𝑛𝐿)
cosh(𝛽𝑛𝐿) − cos(𝛽𝑛𝐿)) (cos(𝛽𝑛𝑥) + cosh(𝛽𝑛𝑥))]. (135)
Pode-se também usar o sistema de equações (130) para estimar aproximações das frequências
angulares naturais exactas (40) e os modos de vibração exactos (135). Assumindo soluções do tipo
exponencial
��(𝑡) = ��𝑒𝜆𝑡 ,
𝑦1(𝑡) = 𝑌1𝑒𝜆𝑡 ,
(136)
obtém-se o seguinte problema de valores e vectores próprios

51
[ 𝜆2 (𝐽 +
1
4𝐿𝐵 𝐴−1𝑚 𝐴−𝑇𝐵𝑇𝐿) + 𝐷𝑇𝐾 𝐷 𝜆2 (
1
2𝐿𝐵 𝐴−1𝑚 𝐴−𝑇��1
′ )
𝜆2 (−2𝐽1𝑙1��1𝑇) −
2𝐾1𝑙1��2𝑇 𝜆2𝑚1 ]
{
��
𝑌1
} = {0
0} (137)
a partir do qual é possível estimar as frequências e modos de vibração.
4.2 Resultados
Na Tabela 6 indicam-se as propriedades físicas e geométricas da viga suspensa modelada neste
trabalho, que coincidem com as da viga da referência (Saavedra, Cuitiño, 2001).
Tabela 6. Propriedades geométricas e físicas da viga suspensa.
Propriedades geométricas
𝑏 [m] 0.026
ℎ [m] 0.019
𝐿 [m] 0.9
Propriedades do material
𝐸 [Pa] 210 × 109
𝜌 [kg/m3] 7800
4.2.1 Frequências naturais
Na Tabela 7 apresentam-se as frequências naturais da viga obtidas de forma analítica (frequências
exactas) e usando o modelo de Elementos Discretos (frequências aproximadas), para um número
crescente de blocos (𝑁 = 8, 12, 24, 48, 96). A Figura 53 mostra o quociente entre as cinco primeiras
Fre
Tabela 7. Frequências naturais exactas e aproximadas da viga suspensa.
Modo Frequências exactas (𝑝𝑒)
(rad. s−1)
Frequências aproximadas (𝑝𝑎) (rad. s−1)
𝑁 = 8 𝑁 = 12 𝑁 = 24 𝑁 = 48 𝑁 = 96
1 786,086 785,272 785,343 785,363 785,364 785,365
2 2166,876 2160,694 2162,071 2162,463 2162,499 2162,505
3 4247,944 4217,719 4229,944 4232,951 4233,226 4233,267
4 7022,067 6887,538 6969,128 6983,754 6985,000 6985,183
5 10489,757 9888,978 10351,896 10407,301 10411,492 10412,099
frequências aproximadas calculadas através do MATLAB e as cinco primeiras frequências exactas,
em função do número de blocos (os mesmos indicados na Tabela 7).
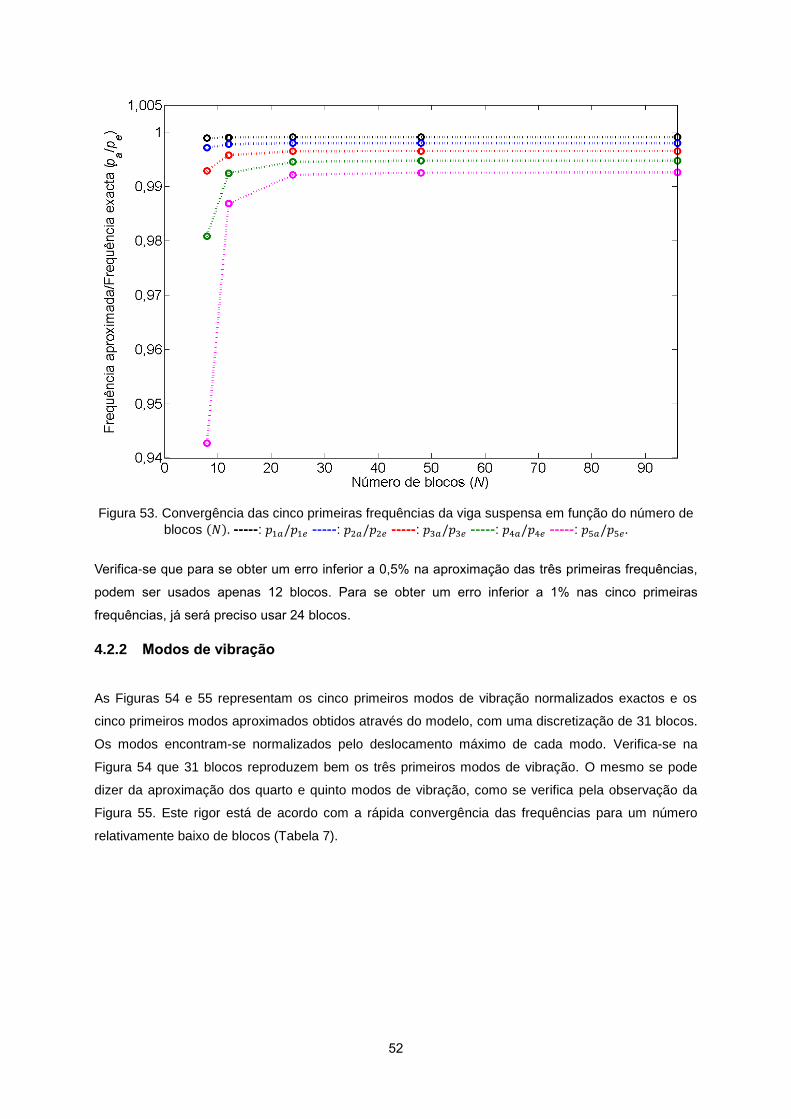
52
Figura 53. Convergência das cinco primeiras frequências da viga suspensa em função do número de
blocos (𝑁). -----: 𝑝1𝑎/𝑝1𝑒 -----: 𝑝2𝑎/𝑝2𝑒 -----: 𝑝3𝑎/𝑝3𝑒 -----: 𝑝4𝑎/𝑝4𝑒 -----: 𝑝5𝑎/𝑝5𝑒 .
Verifica-se que para se obter um erro inferior a 0,5% na aproximação das três primeiras frequências,
podem ser usados apenas 12 blocos. Para se obter um erro inferior a 1% nas cinco primeiras
frequências, já será preciso usar 24 blocos.
4.2.2 Modos de vibração
As Figuras 54 e 55 representam os cinco primeiros modos de vibração normalizados exactos e os
cinco primeiros modos aproximados obtidos através do modelo, com uma discretização de 31 blocos.
Os modos encontram-se normalizados pelo deslocamento máximo de cada modo. Verifica-se na
Figura 54 que 31 blocos reproduzem bem os três primeiros modos de vibração. O mesmo se pode
dizer da aproximação dos quarto e quinto modos de vibração, como se verifica pela observação da
Figura 55. Este rigor está de acordo com a rápida convergência das frequências para um número
relativamente baixo de blocos (Tabela 7).

53
Figura 54. Primeiro, segundo e terceiro modos de vibração da viga suspensa (31 blocos).
___: 1º modo exacto; o: 1º modo calculado; ___: 2º modo exacto; o: 2º modo calculado
___: 3º modo exacto; o: 3º modo calculado.
Figura 55. Quarto e quinto modos de vibração da viga suspensa (31 blocos).
___: 4º modo exacto; o: 4º modo calculado; ___: 5º modo exacto; o: 5º modo calculado.

54
4.2.3 Viga suspensa com fenda
Nesta secção comparam-se os resultados numéricos obtidos usando o Método dos Elementos
Discretos com os resultados experimentais homólogos que se podem encontrar no artigo (Saavedra,
Cuitiño, 2001). As propriedades geométricas e físicas da viga são as indicadas na Tabela 6. Tal como
indicado em (Saavedra, Cuitiño, 2001), considerou-se uma fenda transversal situada a uma distância
𝑙𝑓 = 585 mm da extremidade esquerda da viga, tendo a fenda uma profundidade 𝑎 = 0.0076 m,
correspondente a 40% da altura da viga. A força harmónica, aplicada a uma distância de 270 mm da
extremidade esquerda, tem uma amplitude 𝐹máx = 10N e uma frequência de excitação 𝑓𝐹 = 62 Hz,
igual a metade da primeira frequência natural (𝑓1 = 124 Hz).
Optou-se por escolher 31 blocos na discretização da consola pois assim é possível situar a fenda, a
força e o acelerómetro exactamente nas posições referidas no artigo (Saavedra, Cuitiño, 2001).
Pretende-se obter a resposta em termos da aceleração linear da secção A que está situada a 810 mm
da extremidade esquerda da viga, conforme indicado na Figura 56. Consideraram-se dois valores
Figura 56. Posições da fenda, actuação da força e leitura da resposta.
para os factores de amortecimento das duas primeiras frequências de vibração: 𝜉 = 0.01
(amortecimento de 1%) e 𝜉 = 0.02 (amortecimento de 2%).
De seguida apresentam-se as evoluções da aceleração da secção A ao longo do tempo
considerando-se no modelo as três situações seguintes: ausência de fenda (Figura 57), uma fenda
sempre aberta (Figura 58) e uma “breathing crack” (Figuras 59 e 60). Apenas no caso de existir uma
“breathing crack” existem diferenças na resposta para 1% ou 2% de amortecimento, pelo que apenas
para a “breathing crack” se faz a distinção entre os dois valores de amortecimento. Será de esperar
maior irregularidade e maiores amplitudes no gráfico da viga com “breathing crack” quando se
considera o amortecimento de menor valor, isto é, de 1%.
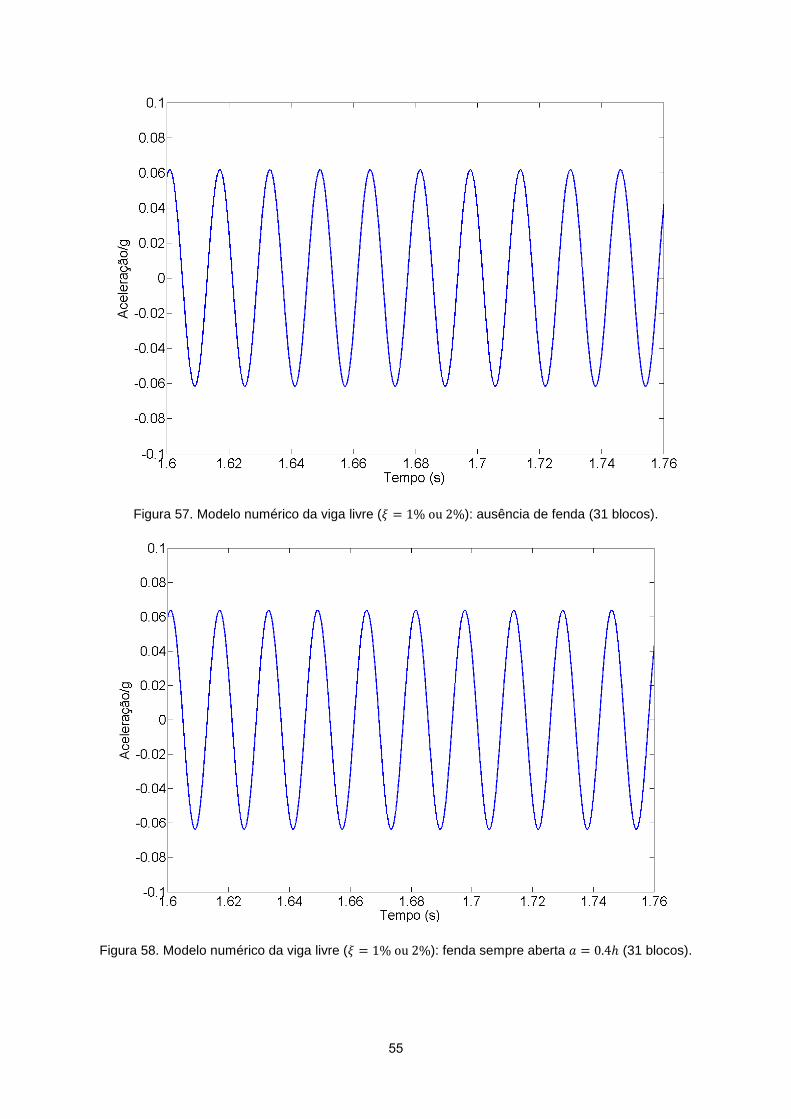
55
Figura 57. Modelo numérico da viga livre (𝜉 = 1% ou 2%): ausência de fenda (31 blocos).
Figura 58. Modelo numérico da viga livre (𝜉 = 1% ou 2%): fenda sempre aberta 𝑎 = 0.4ℎ (31 blocos).

56
Como se pode observar pela comparação das Figuras 57 e 58, embora os valores das acelerações
aumentem ligeiramente no caso de existir uma fenda devido à diminuição da rigidez, esse aumento é
menor do que o aumento homólogo observado na viga em consola provavelmente por a secção onde
se localiza a fenda ser uma secção de menor curvatura. No caso de existir uma “breathing crack” as
curvas não são simétricas: as acelerações negativas são maiores do que as positivas. Também não
se verifica que o caso das acelerações correspondente à “breathing crack” seja um caso intermédio
das situações de viga sem fenda e com uma fenda sempre aberta, ao contrário do que acontece para
o modelo de viga em consola.
As Figuras 59 e 60 correspondem à simulação de uma viga suspensa com uma “breathing crack”,
assumindo um modelo com 31 blocos e amortecimentos de 1% e 2%, respectivamente. Nas Figuras
61 e 62 assume-se um modelo com 91 blocos e amortecimentos de 1% e 2%, respectivamente.
Apresentam-se também para comparação os resultados experimentais incluídos em (Saavedra,
Cuitiño, 2001) representados por triângulos preenchidos. Verifica-se que a aproximação obtida
recorrendo ao MED, nomeadamente, assumindo 2% de amortecimento, é bastante aceitável e, de
uma forma geral, melhor do que as aproximações obtidas com os modelos desenvolvidos em
(Saavedra, Cuitiño, 2001) e (Sinha, Friswell, 2002). Nota-se um desfasamento entre a resposta do
modelo e a resposta experimental. No entanto, a resposta obtida com o modelo tem uma frequência
igual à frequência da força excitadora (como seria de esperar em regime permanente). O
desfasamento entre a resposta numérica e a resposta experimental pode provavelmente ser devido
ao facto de na situação experimental a gravidade actuar e consequentemente produzir alterações no
estado da fenda. Por comparação das quatro Figuras entre si verifica-se que um amortecimento de
Figura 59. Modelo numérico da viga suspensa (𝜉 = 1%): "breathing crack" 𝑎 = 0.4ℎ (31 blocos).
____ Curva obtida do MED; ▲ Valores experimentais (Saavedra, Cuitiño, 2001).

57
Figura 60. Modelo numérico da viga suspensa (𝜉 = 2%): "breathing crack" 𝑎 = 0.4ℎ (31 blocos).
____ Curva obtida do MED; ▲ Valores experimentais (Saavedra, Cuitiño, 2001).
Figura 61. Modelo numérico da viga suspensa (𝜉 = 1%): "breathing crack" 𝑎 = 0.4ℎ (91 blocos).
____ Curva obtida do MED; ▲ Valores experimentais (Saavedra, Cuitiño, 2001).

58
Figura 62. Modelo numérico da viga suspensa (𝜉 = 2%): "breathing crack" 𝑎 = 0.4ℎ (91 blocos).
____ Curva obtida do MED; ▲ Valores experimentais (Saavedra, Cuitiño, 2001).
𝜉 = 2% resulta em curvas mais suaves do que aquelas obtidas com um amortecimento de 𝜉 = 1% (o
que é particularmente visível quando o estado da fenda se altera) e que as acelerações positivas
reduzem ao aumentar o factor de amortecimento. Verifica-se ainda que não existe grande diferença
entre os gráficos obtidos de uma discretização da viga com 31 e 91 blocos, o que está de acordo com
a rápida convergência observada na Tabela 7.
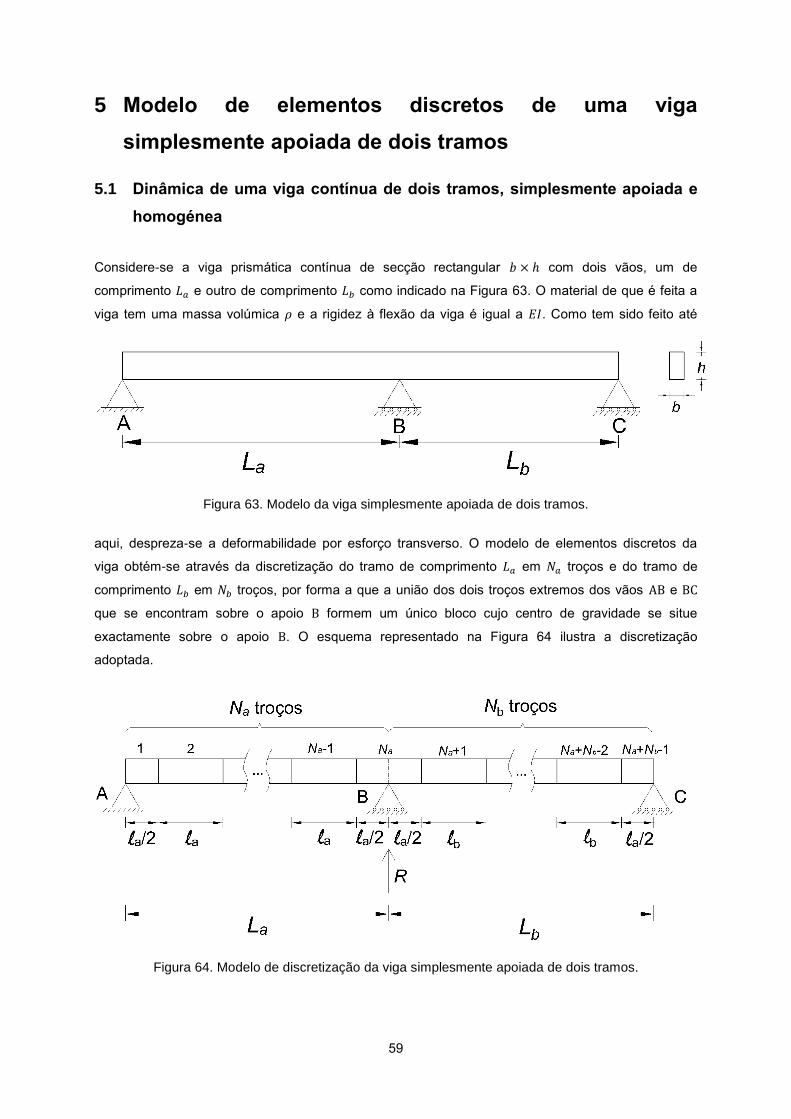
59
5 Modelo de elementos discretos de uma viga
simplesmente apoiada de dois tramos
5.1 Dinâmica de uma viga contínua de dois tramos, simplesmente apoiada e
homogénea
Considere-se a viga prismática contínua de secção rectangular 𝑏 × ℎ com dois vãos, um de
comprimento 𝐿𝑎 e outro de comprimento 𝐿𝑏 como indicado na Figura 63. O material de que é feita a
viga tem uma massa volúmica 𝜌 e a rigidez à flexão da viga é igual a 𝐸𝐼. Como tem sido feito até
Figura 63. Modelo da viga simplesmente apoiada de dois tramos.
aqui, despreza-se a deformabilidade por esforço transverso. O modelo de elementos discretos da
viga obtém-se através da discretização do tramo de comprimento 𝐿𝑎 em 𝑁𝑎 troços e do tramo de
comprimento 𝐿𝑏 em 𝑁𝑏 troços, por forma a que a união dos dois troços extremos dos vãos AB e BC
que se encontram sobre o apoio B formem um único bloco cujo centro de gravidade se situe
exactamente sobre o apoio B. O esquema representado na Figura 64 ilustra a discretização
adoptada.
Figura 64. Modelo de discretização da viga simplesmente apoiada de dois tramos.

60
Note-se que a discretização em troços indicada no esquema anterior não coincide com a
discretização em blocos porque os dois troços que partilham a secção sobre o apoio central formam
um único bloco rígido. Assim há 𝑁𝑎 +𝑁𝑏 troços mas apenas 𝑁𝑎 + 𝑁𝑏 − 1 blocos rígidos no modelo de
elementos discretos.
Para que um bloco de comprimento 𝑙𝑎 =𝐿𝑎
𝑁𝑎−1 fique simetricamente disposto em relação ao apoio B e
para que o bloco da extremidade direita do tramo BC tenha também um comprimento 𝑙𝑎
2 igual ao do
primeiro bloco do tramo AB, os blocos intermédios do tramo BC terão um comprimento 𝑙𝑏 =𝐿𝑏−𝑙𝑎
𝑁𝑏−2. O
modelo de elementos discretos pode representar-se esquematicamente com molas de rotação a ligar
dois blocos rígidos consecutivos, como se indica na Figura 65.
Figura 65. Modelo de elementos discretos da viga simplesmente apoiada de dois tramos.
As molas de rotação que ligam blocos consecutivos são elásticas lineares e têm uma rigidez
constante
𝐾𝑛 =
𝐸𝐼
𝑙𝑎, 𝑛 = 2,… , 𝑁𝑎 , (138a)
ou
𝐾𝑛 =
𝐸𝐼
𝑙𝑏, 𝑛 = 𝑁𝑎 + 1,… ,𝑁𝑎 + 𝑁𝑏 − 1 (138b)
consoante as molas estejam no tramo AB ou no tramo BC, respectivamente. O índice 𝑛 em (138a) e
(138b) é o número de ordem das ligações e não dos blocos. Faz-se notar que a primeira mola e a
última mola do segundo tramo (BC) devem ter rigidezes iguais a
𝐾𝑛 =
𝐸𝐼
𝑙𝑎 + 𝑙𝑏2
=2𝐸𝐼
𝑙𝑎 + 𝑙𝑏 (139)
porque essas molas ligam blocos de comprimentos 𝑙𝑎 e 𝑙𝑏 (em geral, diferentes).

61
A equação diferencial que rege o movimento de translação do 𝑛-ésimo bloco é
𝑚𝑛��𝑛 = 𝑆𝑛+1 − 𝑆𝑛, 𝑛 = 1, 2, … , 𝑁𝑎 − 1,𝑁𝑎 + 1,… ,𝑁𝑎 + 𝑁𝑏 − 1 (140a)
ou
𝑚𝑛��𝑛 = 𝑆𝑛+1 − 𝑆𝑛 + 𝑅, 𝑛 = 𝑁𝑎 (140b)
em que 𝑅 é a reacção dinâmica instantânea no apoio B suposta positiva se exercer a sua acção de
baixo para cima. O conjunto de equações (140a) e (140b) pode escrever-se na forma
[ 𝑚1 0 0
0 ⋱𝑚𝑁𝑎−1
𝑚𝑁𝑎𝑚𝑁𝑎+1
⋱ 00 0 𝑚𝑁𝑎+𝑁𝑏−1]
{
��1⋮
��𝑁𝑎−1��𝑁𝑎��𝑁𝑎+1⋮
��𝑁𝑎+𝑁𝑏−1}
=
=
[ 1 0 0 ⋯ 0−1 1 00 −1 1 0⋮
−1 1 00 0 −1 1 ]
{
𝑆2
⋮
𝑆𝑁𝑎+𝑁𝑏}
−
{
10
⋮
0 }
𝑆1 +
{
0⋮010⋮0}
𝑅,
(141)
em que a matriz 𝐴 ∈ ℝ(𝑁𝑎+𝑁𝑏−1)×(𝑁𝑎+𝑁𝑏−1) e os vectores ��, �� ∈ ℝ(𝑁𝑎+𝑁𝑏−1). O sistema anterior pode
ainda escrever-se na forma matricial
𝑚�� = 𝐴�� − ��𝑆1 + ��𝑅 (142)
em que �� = {0 ⋯0 1 0 ⋯ 0}𝑇 tem o elemento unitário na 𝑁𝑎-ésima posição. A equação que rege o
movimento angular do n-ésimo bloco é
𝐽𝑛��𝑛 = 𝑀𝑛+1 −𝑀𝑛 +
𝑙𝑛2(𝑆𝑛+1 + 𝑆𝑛), 𝑛 = 1,… , 𝑁𝑎 + 𝑁𝑏 − 1. (143)
Atendendo a que o bloco sobre o apoio roda em torno do seu centro de massa, as equações do
movimento angular são todas do mesmo tipo, ao contrário do que acontece com as equações do
movimento de translação. As equações (143) podem escrever-se na forma matricial
62
[ 𝐽1 0 0
0 ⋱
⋱ 00 0 𝐽𝑁𝑎+𝑁𝑏−1]
{
��1
⋮
��𝑁𝑎+𝑁𝑏−1}
=
[ 1 0 0 ⋯ 0−1 1 00 −1 1 0⋮
0 −1 10 0 0 −1]
{
𝑀2
⋮
𝑀𝑁𝑎+𝑁𝑏−1}
+
+1
2
[ 𝑙1 0 0
0 ⋱
⋱ 00 0 𝑙𝑁𝑎+𝑁𝑏−1]
∙
{
[ 1 0 0 ⋯ 01 1 00 1 1 0⋮
1 1 00 0 1 1 ]
{
𝑆2
⋮
𝑆𝑁𝑎+𝑁𝑏}
+
{
10
⋮
0 }
𝑆1
}
(144)
ou ainda, de uma forma mais compacta,
𝐽�� = 𝐶�� +
1
2𝐿(���� + ��𝑆1), (145)
em que a matriz 𝐶 ∈ ℝ(𝑁𝑎+𝑁𝑏−1)×(𝑁𝑎+𝑁𝑏−2) e as matrizes ��, 𝐽, 𝐿 ∈ ℝ(𝑁𝑎+𝑁𝑏−1)×(𝑁𝑎+𝑁𝑏−1). A lei
constitutiva em cada mola é elástica linear dada por
𝑀𝑛 = 𝐾𝑛(𝜃𝑛 − 𝜃𝑛−1), 𝑛 = 2,… , 𝑁𝑎 + 𝑁𝑏 − 1, (146)
ou, em forma matricial,
{
𝑀2⋮
⋮𝑀𝑁𝑎+𝑁𝑏−1}
=
=
[ 𝐾2 0 ⋯0 𝐾3 0⋮ 0 ⋱
⋯ 0⋮
⋮0 ⋯
𝐾𝑁𝑎+𝑁𝑏−2 0
0 𝐾𝑁𝑎+𝑁𝑏−1]
[ −1 1 0 ⋯ 00 −1 1 0 ⋮⋮
−1 1 00 0 −1 1 ]
{
𝜃1⋮
⋮𝜃𝑁𝑎+𝑁𝑏−1}
(147)
ou ainda, numa forma mais compacta,
�� = 𝐾����, (148)
em que a matriz 𝐷 ∈ ℝ(𝑁𝑎+𝑁𝑏−2)×(𝑁𝑎+𝑁𝑏−1). As equações de compatibilidade entre os deslocamentos
transversais dos centros de gravidade dos blocos e as rotações são dadas por
𝐴�� =
1
2𝐵 𝐿��, (149)
as quais, derivadas duas vezes em ordem ao tempo, permitem obter

63
𝐴�� =
1
2𝐵 𝐿��. (150)
O sistema de equações é complementado por duas condições de fronteira que, fisicamente,
correspondem a impor deslocamentos transversais relativos nulos entre os apoios A e B,
{𝑙1 ⋯ 𝑙𝑁𝑎 2⁄ 0 ⋯ 0⏟ 𝑁𝑏−1 zeros
}
{
𝜃1⋮𝜃𝑁𝑎𝜃𝑁𝑎+1⋮
𝜃𝑁𝑎+𝑁𝑏−1}
= 0, ��𝑎𝑇�� = 0, (151)
e entre os apoios B e C
{ 0 ⋯ 0⏟ 𝑁𝑎−1 zeros
𝑙𝑁𝑎 2⁄ ⋯ 𝑙𝑁𝑎+𝑁𝑏−1 }
{
𝜃1⋮𝜃𝑁𝑎𝜃𝑁𝑎+1⋮
𝜃𝑁𝑎+𝑁𝑏−1}
= 0, ��𝑏𝑇�� = 0. (152)
São especialmente úteis as segundas derivadas de (151) e (152) em ordem ao tempo. Em resumo, o
sistema de equações a resolver é
{
𝑚�� = 𝐴�� − ��𝑆1 + ��𝑅
𝐽�� = 𝐶�� +1
2𝐿(���� + ��𝑆1)
�� = 𝐾𝐷 ��
𝐴�� =1
2𝐵 𝐿��
��𝑎𝑇 �� = 0
��𝑏𝑇 �� = 0
𝑁𝑎 +𝑁𝑏 − 1 equações
𝑁𝑎 +𝑁𝑏 − 1 equações
𝑁𝑎 +𝑁𝑏 − 2 equações
𝑁𝑎 +𝑁𝑏 − 1 equações
1 equação
1 equação
(153a)
(153b)
(153c)
(153d)
(153e)
(153f)
O sistema anterior tem um número de 4(𝑁𝑎 + 𝑁𝑏) − 3 incógnitas (ver a Tabela 8) que iguala o número
de equações.
Tabela 8. Número de incógnitas do sistema (153) a resolver para a viga simplesmente apoiada de dois tramos.
𝑁𝑎 + 𝑁𝑏 − 1 (��)
𝑁𝑎 + 𝑁𝑏 (��, 𝑆1)
1 (𝑅)
𝑁𝑎 + 𝑁𝑏 − 1 (��)
𝑁𝑎 + 𝑁𝑏 − 2 (��)
4(𝑁𝑎 + 𝑁𝑏) − 3

64
Com o objectivo de escrever as equações do movimento apenas em função de ��, começa-se por
obter de (153a)
�� = 𝐴−1(𝑚�� + ��𝑆1 − ��𝑅) (154)
e de (153d)
�� =
1
2𝐴−1𝐵 𝐿��, (155)
pelo que
𝑆 =
1
2𝐴−1𝑚 𝐴−1𝐵 𝐿�� + 𝐴−1a𝑆1 − 𝐴
−1��𝑅. (156)
Substituindo (153c) e (156) em (153b) obtém-se
(𝐽 −
1
4𝐿 𝐵𝐴−1𝑚 𝐴−1𝐵 𝐿) �� = 𝐶 𝐾 𝐷�� +
1
2𝐿(�� + 𝐵𝐴−1��)𝑆1 −
1
2𝐿 𝐵𝐴−1��𝑅. (157)
No caso de uma discretização uniforme em cada tramo tem-se
1
2𝐿(�� + 𝐵 𝐴−1��) = {𝑙1 𝑙2 ⋯ 𝑙𝑁𝑎−1 𝑙𝑁𝑎 𝑙𝑁𝑎+1 ⋯ 𝑙𝑁𝑎+𝑁𝑏−2 𝑙𝑁𝑎+𝑁𝑏−1 }
𝑇=
= {𝑙𝑎2 𝑙𝑎 ⋯ 𝑙𝑎 𝑙𝑎 𝑙𝑏 ⋯ 𝑙𝑏
𝑙𝑎2 }𝑇
= ��.
(158)
Definindo também
𝐸−1 = 𝐽 −
1
4𝐿𝐵 𝐴−1𝑚 𝐴−1𝐵 𝐿, (159)
é possível escrever a equação diferencial (157) na forma
�� = 𝐸 𝐶 𝐾 𝐷�� + 𝐸��𝑆1 −
1
2𝐸 𝐿 𝐵 𝐴−1��𝑅, (160)
ficando dependente das variáveis 𝑆1 e 𝑅 que serão eliminadas pelo uso das condições de
fronteira ��𝑎𝑇 �� = 0 e ��𝑏
𝑇 �� = 0, respectivamente (153e) e (153f):
{��𝑎𝑇 �� = 0 ⇔
��𝑏𝑇 �� = 0 ⇔
{��𝑎𝑇𝐸 𝐶 𝐾 𝐷�� + ��𝑎
𝑇𝐸��𝑆1 −1
2��𝑎𝑇𝐸 𝐿 𝐵 𝐴−1��𝑅 = 0
��𝑏𝑇𝐸 𝐶 𝐾 𝐷�� + ��𝑏
𝑇𝐸��𝑆1 −1
2��𝑏𝑇𝐸 𝐿 𝐵 𝐴−1��𝑅 = 0
(161)
ou
[2��𝑎𝑇𝐸�� −��𝑎
𝑇𝐸 𝐿 𝐵 𝐴−1��
2��𝑏𝑇𝐸�� −��𝑏
𝑇𝐸 𝐿 𝐵 𝐴−1��] {𝑆1𝑅} = {
−2��𝑎𝑇𝐸 𝐶 𝐾 𝐷��
−2��𝑏𝑇𝐸 𝐶 𝐾 𝐷��
}. (162)
Resolvendo o sistema linear anterior em ordem a 𝑆1 e 𝑅 obtém-se
65
𝑆1 =
(��𝑎𝑇𝐸 𝐶 𝐾 𝐷��)(��𝑏
𝑇𝐸 𝐿 𝐵 𝐴−1��) − (��𝑏𝑇𝐸 𝐶 𝐾 𝐷��)(��𝑎
𝑇𝐸 𝐿 𝐵 𝐴−1��)
(��𝑏𝑇𝐸��)(��𝑎
𝑇𝐸 𝐿 𝐵 𝐴−1��) − (��𝑎𝑇𝐸��)(��𝑏
𝑇𝐸 𝐿 𝐵 𝐴−1��)= ��𝑇𝐸 𝐶 𝐾 𝐷��, (163)
em que
��𝑇 =
(��𝑏𝑇𝐸 𝐿 𝐵 𝐴−1��)��𝑎
𝑇 − (��𝑎𝑇𝐸 𝐿 𝐵 𝐴−1��)��𝑏
𝑇
(��𝑏𝑇𝐸��)(��𝑎
𝑇𝐸 𝐿 𝐵 𝐴−1��) − (��𝑎𝑇𝐸��)(��𝑏
𝑇𝐸 𝐿 𝐵 𝐴−1��) (164)
é um vector linha e
𝑅 =
(2��𝑎𝑇𝐸 𝐶 𝐾 𝐷��)(��𝑏
𝑇𝐸��) − (2��𝑏𝑇𝐸 𝐶 𝐾 𝐷��)(��𝑎
𝑇𝐸��)
(��𝑏𝑇𝐸��)(��𝑎
𝑇𝐸 𝐿 𝐵 𝐴−1��) − (��𝑎𝑇𝐸��)(��𝑏
𝑇𝐸 𝐿 𝐵 𝐴−1��)= ��𝑇𝐸 𝐶 𝐾 𝐷��, (165)
em que
��𝑇 =
2[(��𝑏𝑇𝐸��)��𝑎
𝑇 − (��𝑎𝑇𝐸��)��𝑏
𝑇]
(��𝑏𝑇𝐸��)(��𝑎
𝑇𝐸 𝐿 𝐵 𝐴−1��) − (��𝑎𝑇𝐸��)(��𝑏
𝑇𝐸 𝐿 𝐵 𝐴−1��) (166)
é também um vector linha. Substituindo (163) e (165) em (160) obtém-se finalmente
�� = (𝐼 + 𝐸 ����𝑇 −
1
2𝐸 𝐿 𝐵 𝐴−1����𝑇) 𝐸 𝐶 𝐾 𝐷��, (167)
em que 𝐼 é a matriz identidade de ordem 𝑁𝑎 + 𝑁𝑏 − 1. A equação (167) deve ser integrada no tempo
usando um conjunto de condições iniciais de deslocamento e velocidade apropriado.
O amortecimento viscoso é tido em conta pela adição ao membro esquerdo da equação (167) de um
termo do tipo 𝐶�� da forma da equação (92) onde 𝐽′ = �� e 𝐾′ = −(𝐼 + 𝐸 ����𝑇 −1
2𝐸 𝐿 𝐵 𝐴−1����𝑇) 𝐸 𝐶 𝐾 𝐷.
Os coeficientes 𝑎0 e 𝑎1 são novamente dados por (95).
As seis primeiras frequências angulares naturais exactas de uma viga simplesmente apoiada de dois
tramos iguais (Saeedi, Bhat, 2011) são dadas pela expressão (40) com 𝐿 igual ao comprimento total
da viga, onde
𝛽1𝐿 = 2𝜋, 𝛽2𝐿 = 2 × 3.9267, 𝛽3𝐿 = 4𝜋, 𝛽4𝐿 = 2 × 7.0687, 𝛽5𝐿 = 6𝜋, 𝛽6𝐿 = 2 × 10.2102,
são as raízes obtidas das equações (168) e (169) conforme se tratem, respectivamente, de modos
ímpares (anti-simétricos) ou modos pares (simétricos):
sin (
𝛽𝑛𝐿
2) = 0, (168)
coth (
𝛽𝑛𝐿
2)− cot (
𝛽𝑛𝐿
2) = 0. (169)

66
Os modos de vibração exactos, por sua vez, são dados pelas equações (170) e (171) conforme se
tratem de modos ímpares ou pares, respectivamente (Saeedi, Bhat, 2011)
𝑊𝑛(𝑥) = 𝐶𝑛[sin(𝛽𝑛𝑥)] (170)
𝑊𝑛(𝑥) = 𝐶𝑛 [sin(𝛽𝑛𝑥) −sin (
𝛽𝑛𝐿2)
sinh (𝛽𝑛𝐿2)× sinh(𝛽𝑛𝑥) +
+ 2 cos (𝛽𝑛𝐿
2) (sinh (𝛽𝑛 (𝑥 −
𝐿
2)) − sin (𝛽𝑛 (𝑥 −
𝐿
2))) × 𝐻 (𝑥 −
𝐿
2)],
(171)
em que 𝐻(𝑥)é a função de Heaviside.
Pode-se também usar o sistema de equações (167) para estimar aproximações das frequências
angulares naturais e os modos de vibração exactos. Assumindo de novo uma solução do tipo
exponencial como indicado em (44) obtém-se o seguinte problema de valores e vectores próprios
algébrico
[𝜆2𝐼 − (𝐼 + 𝐸 ����𝑇 −
1
2𝐸 𝐿 𝐵 𝐴−1����𝑇) 𝐸 𝐶 𝐾 𝐷] �� = 0 (172)
a partir do qual é possível calcular frequências e modos de vibração aproximados.
5.2 Resultados numéricos
Na Tabela 9 indicam-se as propriedades geométricas e materiais da viga simplesmente apoiada de
dois tramos usada nas simulações. Julgou-se conveniente simular o caso mais simples atribuindo
comprimentos iguais a ambos os vãos AB e BC. O amortecimento é do tipo Rayleigh com 𝜉1 = 𝜉2 =
1%.
Tabela 9. Propriedades geométricas e físicas da viga simplesmente apoiada de dois tramos.
Propriedades geométricas
𝑏 [m] 0.06
ℎ [m] 0.22
𝐿AB [m] 4.0
𝐿BC [m] 4.0
𝐿 total[m] 8.0
Propriedades do material
𝐸 [Pa] 210 × 109
𝜌 [kg/m3] 7800
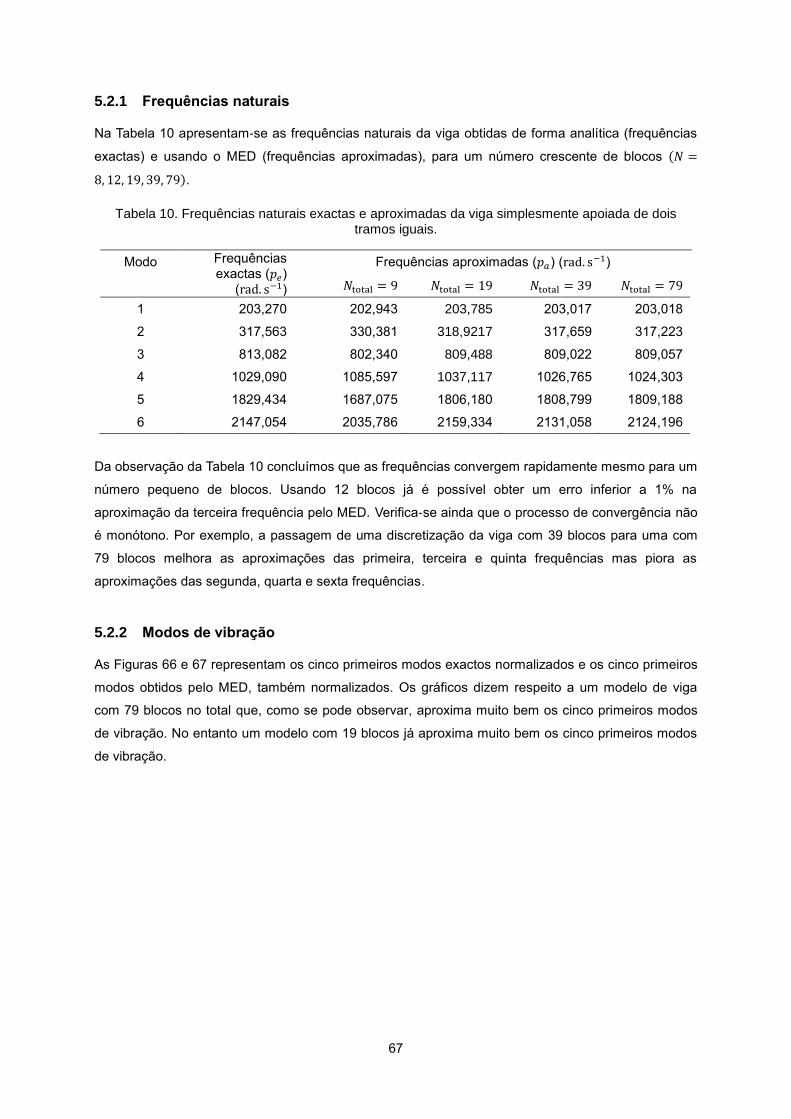
67
5.2.1 Frequências naturais
Na Tabela 10 apresentam-se as frequências naturais da viga obtidas de forma analítica (frequências
exactas) e usando o MED (frequências aproximadas), para um número crescente de blocos (𝑁 =
8, 12, 19, 39, 79).
Tabela 10. Frequências naturais exactas e aproximadas da viga simplesmente apoiada de dois tramos iguais.
Modo Frequências exactas (𝑝𝑒)
(rad. s−1)
Frequências aproximadas (𝑝𝑎) (rad. s−1)
𝑁total = 9 𝑁total = 19 𝑁total = 39 𝑁total = 79
1 203,270 202,943 203,785 203,017 203,018
2 317,563 330,381 318,9217 317,659 317,223
3 813,082 802,340 809,488 809,022 809,057
4 1029,090 1085,597 1037,117 1026,765 1024,303
5 1829,434 1687,075 1806,180 1808,799 1809,188
6 2147,054 2035,786 2159,334 2131,058 2124,196
Da observação da Tabela 10 concluímos que as frequências convergem rapidamente mesmo para um
número pequeno de blocos. Usando 12 blocos já é possível obter um erro inferior a 1% na
aproximação da terceira frequência pelo MED. Verifica-se ainda que o processo de convergência não
é monótono. Por exemplo, a passagem de uma discretização da viga com 39 blocos para uma com
79 blocos melhora as aproximações das primeira, terceira e quinta frequências mas piora as
aproximações das segunda, quarta e sexta frequências.
5.2.2 Modos de vibração
As Figuras 66 e 67 representam os cinco primeiros modos exactos normalizados e os cinco primeiros
modos obtidos pelo MED, também normalizados. Os gráficos dizem respeito a um modelo de viga
com 79 blocos no total que, como se pode observar, aproxima muito bem os cinco primeiros modos
de vibração. No entanto um modelo com 19 blocos já aproxima muito bem os cinco primeiros modos
de vibração.

68
Figura 66. Primeiro, segundo e terceiro modos de vibração da viga simplesmente apoiada de dois
tramos (79 blocos). ___: 1º modo exacto; o: 1º modo calculado; ___: 2º modo exacto; o: 2º modo
calculado; ___: 3º modo exacto; o: 3º modo calculado.
Figura 67. Quarto e quinto modos de vibração da viga simplesmente apoiada de dois tramos (79
blocos). ___: 4º modo exacto; o: 4º modo calculado; ___: 5º modo exacto; o: 5º modo calculado.
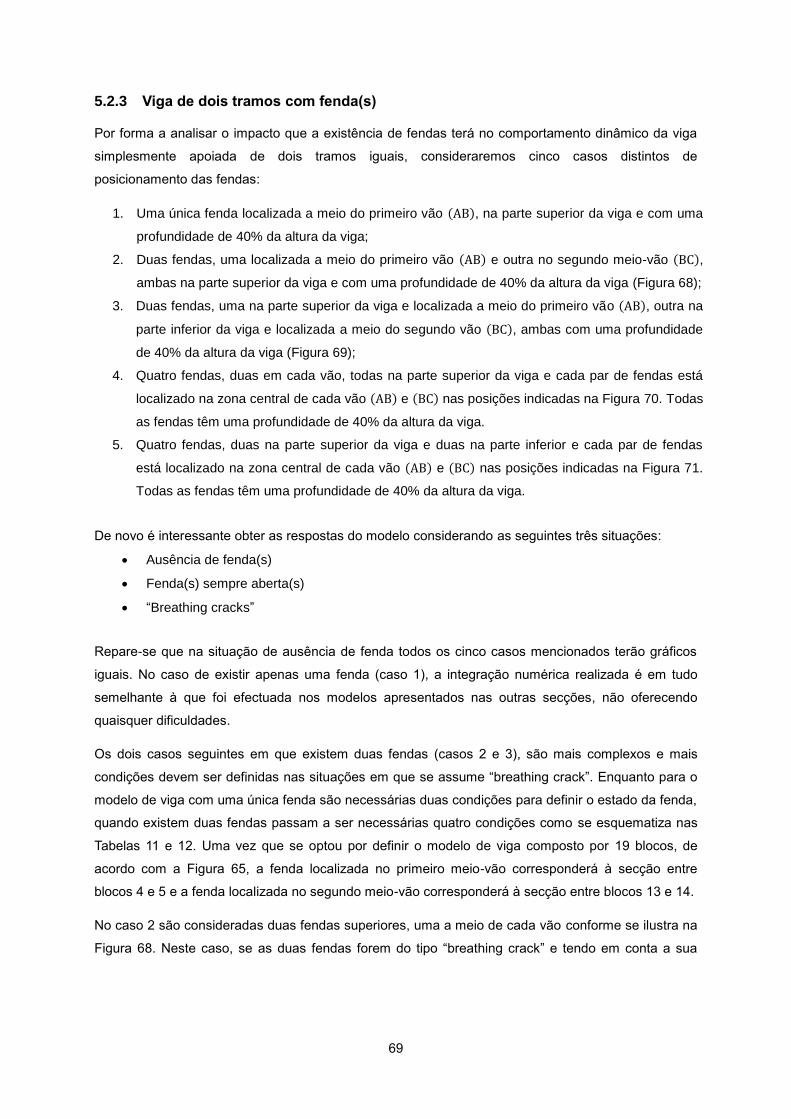
69
5.2.3 Viga de dois tramos com fenda(s)
Por forma a analisar o impacto que a existência de fendas terá no comportamento dinâmico da viga
simplesmente apoiada de dois tramos iguais, consideraremos cinco casos distintos de
posicionamento das fendas:
De novo é interessante obter as respostas do modelo considerando as seguintes três situações:
Repare-se que na situação de ausência de fenda todos os cinco casos mencionados terão gráficos
iguais. No caso de existir apenas uma fenda (caso 1), a integração numérica realizada é em tudo
semelhante à que foi efectuada nos modelos apresentados nas outras secções, não oferecendo
quaisquer dificuldades.
Os dois casos seguintes em que existem duas fendas (casos 2 e 3), são mais complexos e mais
condições devem ser definidas nas situações em que se assume “breathing crack”. Enquanto para o
modelo de viga com uma única fenda são necessárias duas condições para definir o estado da fenda,
quando existem duas fendas passam a ser necessárias quatro condições como se esquematiza nas
Tabelas 11 e 12. Uma vez que se optou por definir o modelo de viga composto por 19 blocos, de
acordo com a Figura 65, a fenda localizada no primeiro meio-vão corresponderá à secção entre
blocos 4 e 5 e a fenda localizada no segundo meio-vão corresponderá à secção entre blocos 13 e 14.
No caso 2 são consideradas duas fendas superiores, uma a meio de cada vão conforme se ilustra na
Figura 68. Neste caso, se as duas fendas forem do tipo “breathing crack” e tendo em conta a sua
1. Uma única fenda localizada a meio do primeiro vão (AB), na parte superior da viga e com uma
profundidade de 40% da altura da viga;
2. Duas fendas, uma localizada a meio do primeiro vão (AB) e outra no segundo meio-vão (BC),
ambas na parte superior da viga e com uma profundidade de 40% da altura da viga (Figura 68);
3. Duas fendas, uma na parte superior da viga e localizada a meio do primeiro vão (AB), outra na
parte inferior da viga e localizada a meio do segundo vão (BC), ambas com uma profundidade
de 40% da altura da viga (Figura 69);
4. Quatro fendas, duas em cada vão, todas na parte superior da viga e cada par de fendas está
localizado na zona central de cada vão (AB) e (BC) nas posições indicadas na Figura 70. Todas
as fendas têm uma profundidade de 40% da altura da viga.
5. Quatro fendas, duas na parte superior da viga e duas na parte inferior e cada par de fendas
está localizado na zona central de cada vão (AB) e (BC) nas posições indicadas na Figura 71.
Todas as fendas têm uma profundidade de 40% da altura da viga.
Ausência de fenda(s)
Fenda(s) sempre aberta(s)
“Breathing cracks”

70
Figura 68. Duas fendas na parte superior da viga simplesmente apoiada de dois tramos iguais. Dimensões em metros.
localização (ambas na parte superior da viga) devem ser consideradas quatro situações distintas que
estão indicadas na Tabela 11.
Tabela 11. Condições de abertura/fecho de duas fendas superiores do tipo "breathing crack". O ângulo de rotação é positivo no sentido trigonométrico directo.
Diferença entre rotações (onde 𝜃𝑖 é
a rotação do bloco 𝑖)
Estado da 1ª e da 2ª fenda,
respectivamente
Se
𝜃6 − 𝜃5 > 0 e 𝜃15 − 𝜃14 > 0
então
Fendas fechadas
𝜃6 − 𝜃5 > 0 e 𝜃15 − 𝜃14 < 0 Fenda fechada e fenda aberta
𝜃6 − 𝜃5 < 0 e 𝜃15 − 𝜃14 > 0 Fenda aberta e fenda fechada
𝜃6 − 𝜃5 < 0 e 𝜃15 − 𝜃14 < 0 Fendas abertas
No caso 3 são consideradas duas fendas, uma superior e uma inferior, ambas a meio de cada vão
conforme se ilustra na Figura 69. Neste caso, se as duas fendas forem do tipo “breathing crack” e
Figura 69. Duas fendas, uma na parte superior e outra na parte inferior da viga simplesmente apoiada de dois tramos iguais. Dimensões em metros.

71
tendo em conta a sua localização (uma na parte superior da viga e outra na parte inferior) devem ser
consideradas as quatro situações distintas enumeradas na Tabela 12.
Tabela 12. Condições de abertura/fecho de uma fenda superior e outra inferior, ambas do tipo
"Breathing crack". O ângulo de rotação é positivo no sentido trigonométrico directo.
Diferença entre rotações (onde 𝜃𝑖 é
a rotação do bloco 𝑖)
Estado da 1ª e da 2ª fenda,
respectivamente
Se
𝜃6 − 𝜃5 > 0 e 𝜃15 − 𝜃14 < 0
então
Fendas fechadas
𝜃6 − 𝜃5 > 0 e 𝜃15 − 𝜃14 > 0 Fenda fechada e fenda aberta
𝜃6 − 𝜃5 < 0 e 𝜃15 − 𝜃14 < 0 Fenda aberta e fenda fechada
𝜃6 − 𝜃5 < 0 e 𝜃15 − 𝜃14 > 0 Fendas abertas
Para os dois casos em que existem quatro fendas na viga simplesmente apoiada de dois tramos
(casos 4 e 5), para um modelo composto por 19 blocos, as duas fendas localizadas no primeiro meio-
vão corresponderão às secções entre blocos 3/4 e 4/5 e as duas fendas localizadas no segundo
meio-vão corresponderão às secções entre blocos 13/14 e 14/15. No caso 4 os dois pares de fendas
consideram-se na parte superior da viga nas localizações apresentadas na Figura 70; no caso 5 um
par de fendas está na parte superior e outro na parte inferior nas localizações apresentadas na Figura
71. Quando da consideração de “breathing crack” é necessário ter em conta dezasseis possíveis
combinações de estados de fendas para permitir definir, em cada instante, todas as combinações de
abertura e fecho de fendas. Conclui-se que ao aumentar o número de fendas no modelo, a
complexidade de situações a considerar aumenta geometricamente; por cada nova fenda o número
de condições duplica em relação à não consideração dessa nova fenda, o que conduz a respostas
mais irregulares.
Figura 70. Quatro fendas na parte superior da viga simplesmente apoiada de dois tramos. Dimensões
em metros.
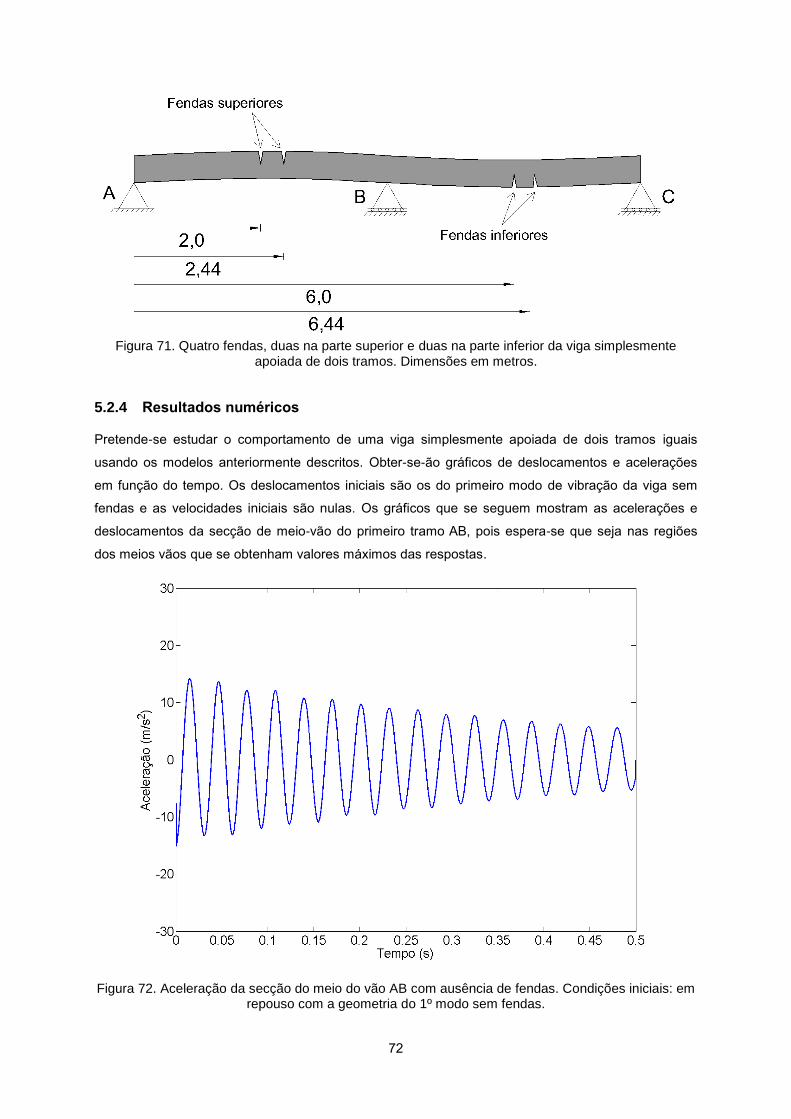
72
Figura 71. Quatro fendas, duas na parte superior e duas na parte inferior da viga simplesmente
apoiada de dois tramos. Dimensões em metros.
5.2.4 Resultados numéricos
Pretende-se estudar o comportamento de uma viga simplesmente apoiada de dois tramos iguais
usando os modelos anteriormente descritos. Obter-se-ão gráficos de deslocamentos e acelerações
em função do tempo. Os deslocamentos iniciais são os do primeiro modo de vibração da viga sem
fendas e as velocidades iniciais são nulas. Os gráficos que se seguem mostram as acelerações e
deslocamentos da secção de meio-vão do primeiro tramo AB, pois espera-se que seja nas regiões
dos meios vãos que se obtenham valores máximos das respostas.
Figura 72. Aceleração da secção do meio do vão AB com ausência de fendas. Condições iniciais: em repouso com a geometria do 1º modo sem fendas.

73
Figura 73. Aceleração da secção do meio do vão AB: uma fenda superior sempre aberta localizada entre os blocos 4 e 5 (do vão AB). Condições iniciais: em repouso com a geometria do 1º modo sem
fendas.
Figura 74. Aceleração da secção do meio do vão AB: uma “breathing crack” superior localizada entre os blocos 4 e 5 (do vão AB). Condições iniciais: em repouso com a geometria do 1º modo sem
fendas.

74
Nas Figuras 72, 73 e 74 representam-se para o caso 1 as acelerações obtidas nas situações de
ausência de fenda, existência de uma fenda sempre aberta e existência de uma fenda do tipo
“breathing crack”, respectivamente. É notória a diferença entre as amplitudes máximas das
acelerações obtidas para as situações de ausência de fenda (Figura 72) e de uma fenda sempre
aberta (Figura 73). É igualmente visível a diferença entre o número de ciclos para o mesmo intervalo
de tempo [0,0.5]s. Conclui-se, como esperado, que a existência de uma fenda traduz-se numa
diminuição da rigidez da estrutura, que faz com que as frequências diminuam e os períodos
aumentem, e que a situação com uma “breathing crack” corresponde a uma caso intermédio entre as
situações com ausência de fenda e uma fenda sempre aberta.
Os gráficos das Figuras 75, 76 e 77 dizem igualmente respeito ao caso 1 e mostram os
deslocamentos da secção do meio do vão AB, correspondendo aos modelos de viga sem fenda, com
uma fenda sempre aberta e com uma “breathing crack”, respectivamente. A diferença entre o número
de ciclos em cada gráfico é evidente. Para o mesmo intervalo de tempo [0,0.5]s, os períodos de
oscilação são crescentes na seguinte ordem de situações: fenda sempre aberta (Figura 76),
“breathing crack” (Figura 77) e ausência de fendas (Figura 75), o que está de acordo com a perda de
rigidez resultante da introdução de uma descontinuidade na viga. Verifica-se que o valor do
deslocamento máximo em módulo para a situação de uma fenda sempre aberta é maior que nas
outras duas situações, como seria de esperar. Também como seria de esperar, os gráficos dos
deslocamentos são mais suaves que os gráficos das acelerações, que correspondem a uma dupla
derivação dos deslocamentos.
Figura 75. Deslocamento da secção do meio do vão AB com ausência de fendas. Condições iniciais: em repouso com a geometria do 1º modo sem fendas.

75
Figura 76. Deslocamento da secção do meio do vão AB: uma fenda superior sempre aberta localizada entre os blocos 4 e 5. Condições iniciais: em repouso com a geometria do 1º modo sem
fendas.
Figura 77. Deslocamento da secção do meio do vão AB: uma “breathing crack” superior localizada entre os blocos 4 e 5. Condições iniciais: em repouso com a geometria do 1º modo sem fendas.
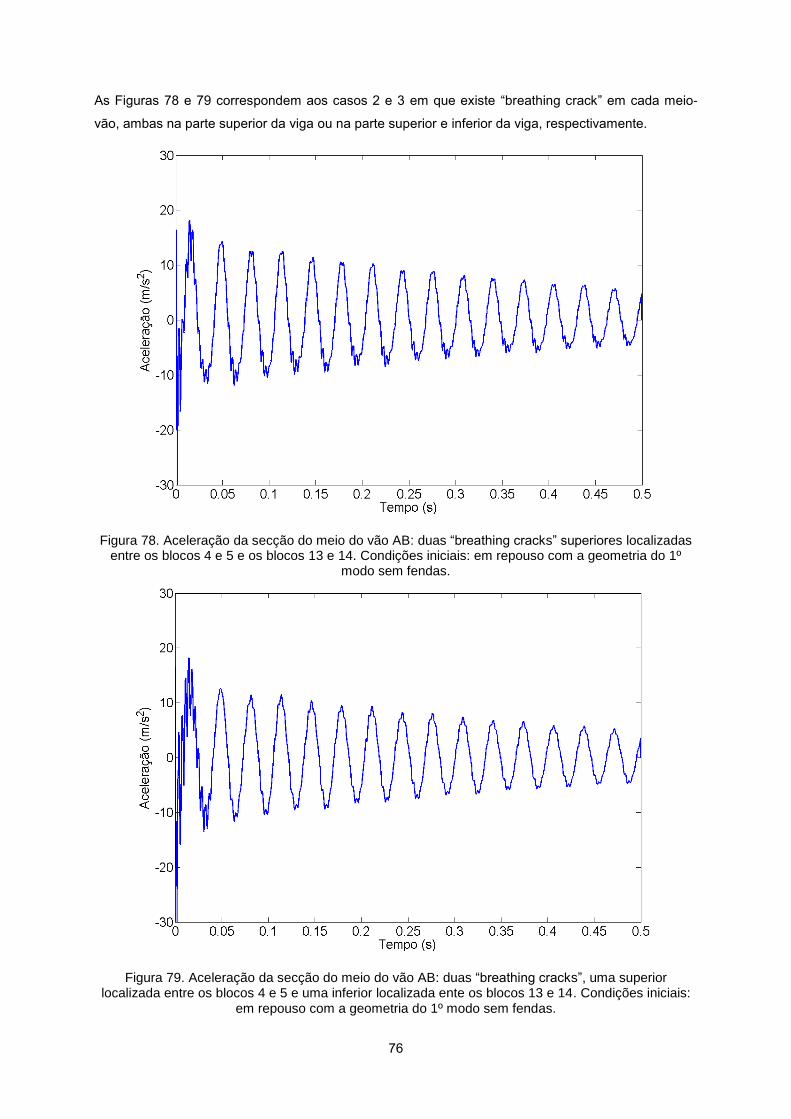
76
As Figuras 78 e 79 correspondem aos casos 2 e 3 em que existe “breathing crack” em cada meio-
vão, ambas na parte superior da viga ou na parte superior e inferior da viga, respectivamente.
Figura 78. Aceleração da secção do meio do vão AB: duas “breathing cracks” superiores localizadas entre os blocos 4 e 5 e os blocos 13 e 14. Condições iniciais: em repouso com a geometria do 1º
modo sem fendas.
Figura 79. Aceleração da secção do meio do vão AB: duas “breathing cracks”, uma superior localizada entre os blocos 4 e 5 e uma inferior localizada ente os blocos 13 e 14. Condições iniciais:
em repouso com a geometria do 1º modo sem fendas.
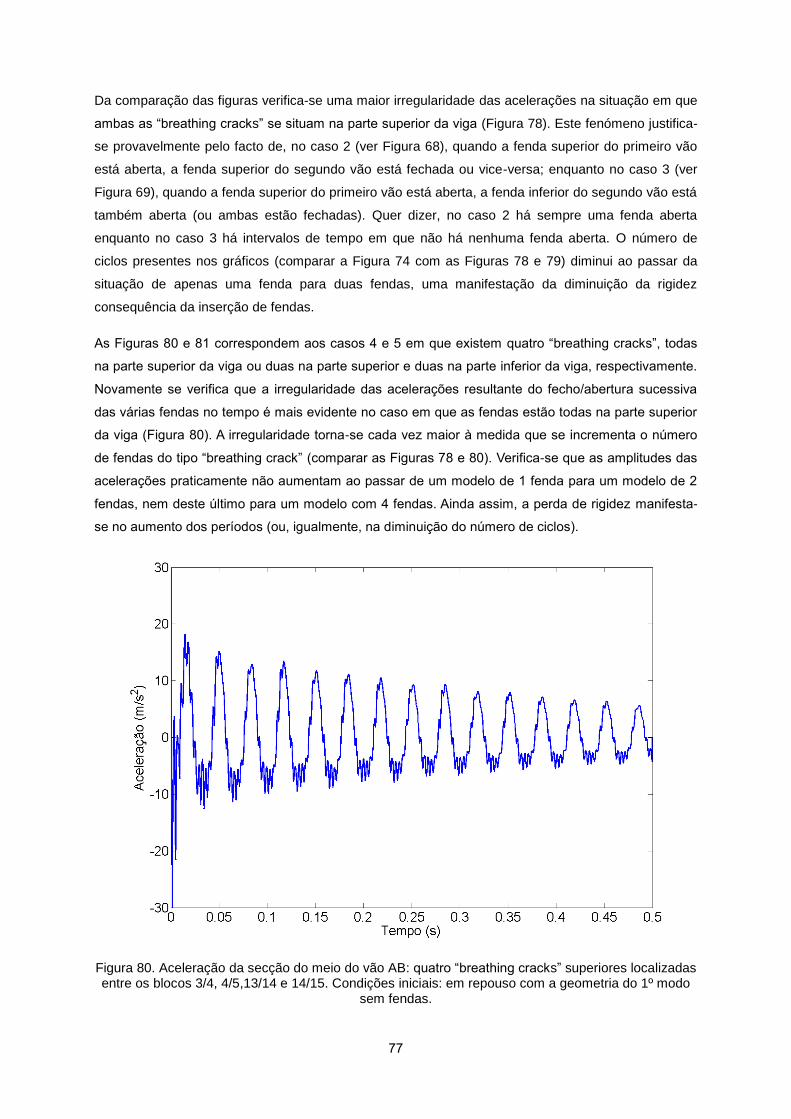
77
Da comparação das figuras verifica-se uma maior irregularidade das acelerações na situação em que
ambas as “breathing cracks” se situam na parte superior da viga (Figura 78). Este fenómeno justifica-
se provavelmente pelo facto de, no caso 2 (ver Figura 68), quando a fenda superior do primeiro vão
está aberta, a fenda superior do segundo vão está fechada ou vice-versa; enquanto no caso 3 (ver
Figura 69), quando a fenda superior do primeiro vão está aberta, a fenda inferior do segundo vão está
também aberta (ou ambas estão fechadas). Quer dizer, no caso 2 há sempre uma fenda aberta
enquanto no caso 3 há intervalos de tempo em que não há nenhuma fenda aberta. O número de
ciclos presentes nos gráficos (comparar a Figura 74 com as Figuras 78 e 79) diminui ao passar da
situação de apenas uma fenda para duas fendas, uma manifestação da diminuição da rigidez
consequência da inserção de fendas.
As Figuras 80 e 81 correspondem aos casos 4 e 5 em que existem quatro “breathing cracks”, todas
na parte superior da viga ou duas na parte superior e duas na parte inferior da viga, respectivamente.
Novamente se verifica que a irregularidade das acelerações resultante do fecho/abertura sucessiva
das várias fendas no tempo é mais evidente no caso em que as fendas estão todas na parte superior
da viga (Figura 80). A irregularidade torna-se cada vez maior à medida que se incrementa o número
de fendas do tipo “breathing crack” (comparar as Figuras 78 e 80). Verifica-se que as amplitudes das
acelerações praticamente não aumentam ao passar de um modelo de 1 fenda para um modelo de 2
fendas, nem deste último para um modelo com 4 fendas. Ainda assim, a perda de rigidez manifesta-
se no aumento dos períodos (ou, igualmente, na diminuição do número de ciclos).
Figura 80. Aceleração da secção do meio do vão AB: quatro “breathing cracks” superiores localizadas entre os blocos 3/4, 4/5,13/14 e 14/15. Condições iniciais: em repouso com a geometria do 1º modo
sem fendas.
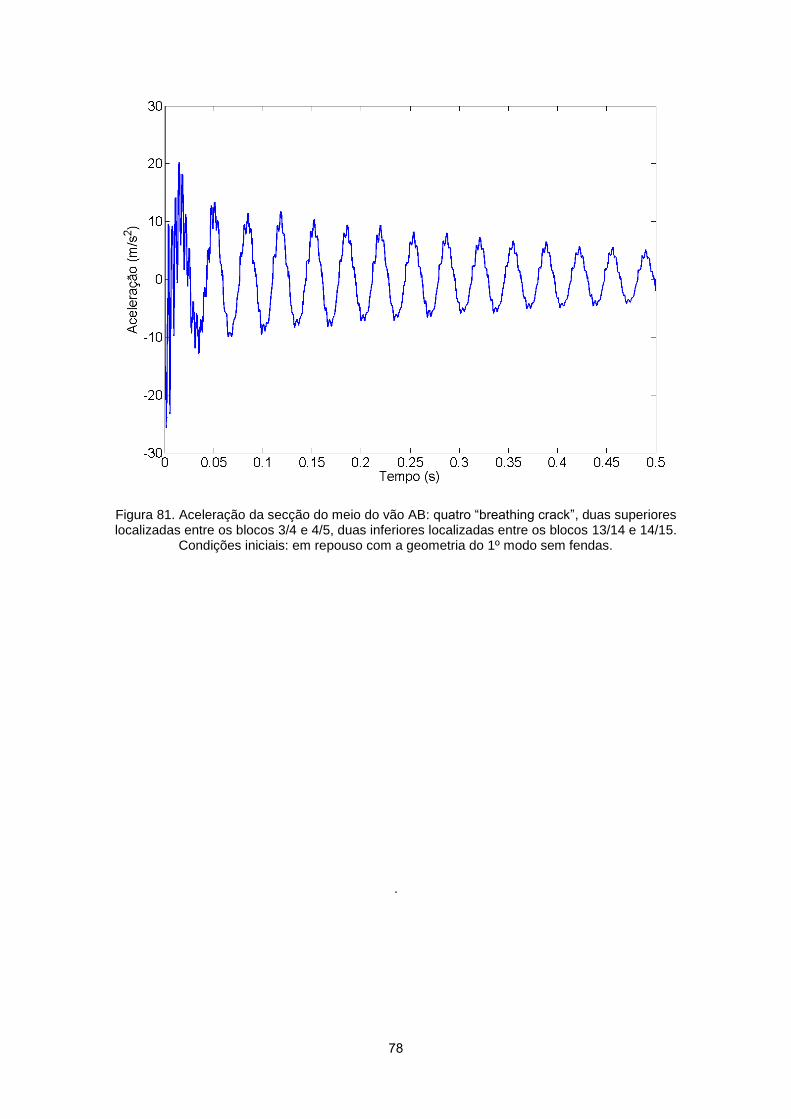
78
Figura 81. Aceleração da secção do meio do vão AB: quatro “breathing crack”, duas superiores localizadas entre os blocos 3/4 e 4/5, duas inferiores localizadas entre os blocos 13/14 e 14/15.
Condições iniciais: em repouso com a geometria do 1º modo sem fendas.
.

79
6 Conclusões
6.1 Contribuições
A detecção de fendas numa estrutura é um assunto muito importante estando continuamente em
investigação novos métodos, mais práticos e menos onerosos, que possibilitem fazer essa detecção;
trata-se de um tema transversal a vários ramos da engenharia tais como Civil, Mecânica ou
Aeronáutica. Este trabalho pretende contribuir para a identificação do tipo de alterações que a
existência de fendas com diferentes características introduz na resposta dinâmica livre ou forçada de
algumas estruturas simples. Assim, a partir da recolha das acelerações da viga através de
acelerómetros estrategicamente colocados, poder-se-á detectar a existência de fendas bem como
estimar a sua profundidade e localização;
No decorrer deste trabalho desenvolve-se um programa em ambiente Matlab que permite aplicar o
Método dos Elementos Discretos (MED) à análise do comportamento dinâmico de vigas. Tendo como
ponto de partida o modelo simples de uma viga simplesmente apoiada, cujas expressões foram
obtidas em (Neild et al., 2001), as expressões para os restantes modelos são deduzidas neste
trabalho ao longo dos respectivos capítulos.
O MED é um método válido e simples para simular o comportamento de vigas fendilhadas. Com base
nos valores apresentados em tabelas e na observação das figuras, é possível retirar as seguintes
conclusões:
O MED permite obter boas aproximações para as frequências naturais e para os modos de
vibração;
As aproximações são melhores para as frequências e os modos mais baixos, para um
mesmo número de blocos usados na discretização da viga, embora por vezes a convergência
não seja monótona;
O MED adapta-se facilmente nas situações de existência de fendas sendo de programação
fácil em Matlab;
Os resultados obtidos pelo MED aproximam bem os resultados experimentais;
Os resultados obtidos com o MED em situações para as quais não existem resultados
experimentais estão de acordo com o esperado, nomeadamente:
o A rigidez de uma viga fendilhada é menor do que a de uma viga sem fendas e esse
facto reflecte-se na diminuição das suas frequências naturais e na sua resposta
dinâmica em regime livre;
o As frequências são mais afectadas pela existência de fendas quando estas se
localizam em regiões de maior curvatura do respectivo modo de vibração;
o As frequências naturais de uma viga onde existe uma “breathing crack” têm valores
intermédios entre as frequências de uma viga sem fendas ou com uma fenda sempre
aberta;
80
o A existência de fendas do tipo “breathing crack” localizadas em zonas de maior
curvatura da viga resulta em respostas mais irregulares quando o estado da fenda se
altera (quando esta passa a estar aberta ou fechada);
o Para a situação em que existem fendas na viga as amplitudes das vibrações em
regime forçado aumentam em relação à situação da viga sem fenda, de acordo com
a perda de rigidez verificada.
6.2 Desenvolvimentos futuros
Um aspecto importante que seria interessante desenvolver em trabalhos futuros é a consideração da
deformabilidade por esforço transverso (que foi ignorada nas simulações numéricas dos modelos
apresentados neste trabalho). Ao tê-la em conta, a dedução das expressões que regem o movimento
de blocos torna-se mais complexa mas os resultados obtidos seriam mais rigorosos, nomeadamente
no caso de as vigas serem pouco esbeltas.
Seria igualmente interessante estudar um maior número de possibilidades de localização e
quantidade de fendas, por forma a aprofundar o conhecimento sobre como a localização de fendas
altera o comportamento dinâmico de uma viga. Também se poderá estender a análise a estruturas
mais complexas, como vigas contínuas com mais de dois tramos ou mesmo pórticos.

81
Referências
Clough, R., Penzien, J. (1993). Dynamics of Structures. McGraw-Hill International Edition (Civil
Engineering Series).
Loutridis, S., Douka, E., Hadjileontiadis, L. (2005). Forced vibration behaviour and crack detection of
cracked beams using instantaneous frequency. NDT&E international, 38, 411-419.
Neild, S., McFadden, P., Williams, M. (2001). A discrete model of a vibrating beam using a time-
stepping approach. Journal of Sound and Vibration, 239(1), 99-121.
Okamura, H., Liu, H., Chu, C.-S., Liebowitz, H. (1969). A cracked column under compression.
Engineering Fracture Mechnics, 1, 547-564.
Rao, S. (2004). Mechanical Vibrations. Pearson Education Inc., Prentice Hall.
Saavedra, P., Cuitiño, L. (2001). Crack detection and vibration behaviour of cracked beams.
Computers and Structures, 79, 1451-1459.
Saeedi, K., Bhat, R. (2011). Clustered natural frequencies in multi-span. Shock and Vibration, 18, 697-
707.
Sinha, J., Friswell, M. (2002). Simulation of the dynamic response of a cracked beam. Computers and
Structures, 80, 1473-1476.

82

I
Anexos
Neste anexo encontram-se algumas listagens de códigos usados para simular os modelos em
MATLAB. Note-se que apenas se expõem partes de código que se julgam importantes para obter os
resultados apresentados em alguns capítulos do presente trabalho, pelo que o programa não deve
correr apenas os excertos de script que se seguem.
A.1. Modelo de elementos discretos [viga simplesmente apoiada]
clc; clear; close all;
N=12; % número de blocos
% Definição das variáveis % N: número de blocos % ln: comprimento do bloco intermédio % le: comprimento do bloco de extremidade % lb: comprimento total da viga % Em: módulo de elasticidade % Ro: densidade % h: altura da viga % b: largura da viga % Ar: área da secção transversal % I: segundo momento de inércia % mn: massa do bloco intermédio % me: massa do bloco de extremidade % Jn: momento central de inércia do bloco intermédio % Je: momento central de inércia do bloco de extremidade % kn: rigidez da mola de rotação % alpha: parâmetro adimensional
%________________ Propriedades materiais da viga__________________ Em=210E9; % Pa Ro=7800; % kg/m
%________________________ Element geometry________________________ b=0.06; h=0.22; b_fract=sym('6/100'); % m h_fract=sym('22/100'); % m
lb=8; % in m ln=lb/(N-1); % m le=lb/(2*(N-1)); % m
Ar=b*h; % m^2 In=b*(h^3)/12; % m^4
mn=Ro*b*h*ln; % kg me=Ro*b*h*le; % kg
Jn=(mn/12)*(h^2+ln^2); % kg*m^2
II
Je=(me/12)*(h^2+le^2); % kg*m^2
kn=(Em*In)/ln; % N*m
%________Matrizes_J,M,L,J,K_adimensionalizadas________
M_=1*eye(N); M_(1,1)=1/2; M_(N,N)=1/2;
l_=ones(N,1); l_(1,1)=1/2; l_(N,1)=1/2;
diag_J=1*eye(N); diag_J(1,1)=0.5*(1/4+(h_fract/ln)^2)/(1+(h_fract/ln)^2); diag_J(N,N)=0.5*(1/4+(h_fract/ln)^2)/(1+(h_fract/ln)^2);
J_=((1+(h_fract/ln)^2)/12)*diag_J;
%___________Definição das matrizes elementares A,B,C,D,I___________
m=N; o=N-1; e_1=ones(N,1); d=-1*e_1;
A=spdiags([d,e_1],[-1,0],m,m); full(A); B=spdiags([e_1,e_1],[-1,0],m,m); full(B); C=spdiags([d,e_1],[-1,0],m,o); full(C); D=spdiags([d,e_1],[0,1],o,m); full(D);
I=eye(N);
%_______________Frequências naturais teóricas_______________
n_freq=1:1:N;
Pn=zeros(N,1); Fn=zeros(N,1); Tn=zeros(N,1);
for ii=1:length(n_freq) Pn(ii,:)=(n_freq(ii)*pi/lb)^2*sqrt((Em*In)/(Ro*Ar)); % in rad/s Fn(ii,:)=Pn(ii,:)/(2*pi); % in Hz Tn(ii,:)=1/Fn(ii,:); % in s end
P=diag(Pn);
%_____________Definição da matriz E_____________
E_inv=J_-((1/4)*M_*B*(A^-1)*M_*(A^-1)*B*M_); E_=inv(E_inv);

III
fract_x=(I-(E_*l_*(l_'))/((l_')*E_*l_))*E_*C*D; x=double(fract_x);
% Problema de valores e vectores próprios [fi,lambda]=eig(x); w_1=-1i*(sqrt(lambda)); % rads^-1 f=w_2/(2*pi); % Hz
% Adimensional ---> dimensional alpha=sqrt(Em*In/(Ro*b*h*(ln^4))); w_2=w_1*alpha; w=rot90(w_2,2);
A.2. Modos de vibração [viga simplesmente apoiada]
%______Distância do apoio esquerdo ao centro de cada bloco______
n3=1:1:N; dx_center(1,1)=le/2;
for jj=2:length(n3)-2 dx_center(2,1)=dx_center(1,1)+3*ln/4; dx_center(jj+1,1)=dx_center(2,1)+(jj-1)*ln; end dx_center(N,1)=lb-le/2;
dx_center_norm=zeros(N,1);
for ii=1:N dx_center_norm(ii,:)=dx_center(ii,:)/8; end
%___________Passar rotações para deslocamentos____________
dy=zeros(N,5);
for ii=1:5 dy(1,ii)=fi(1,ii)*le/2; end
for ii=1:5 dy(2,ii)=dy(1,ii)+fi(1,ii)*le/2+fi(2,ii)*ln/2; end
for jj=3:N-1 for ii=1:5 dy(jj,ii)=dy(jj-1,ii)+fi(jj-1,ii)*ln/2+fi(jj,ii)*ln/2; end end
for ii=1:5 dy(N,ii)=dy(N-1,ii)+fi(N-1,ii)*ln/2+fi(N,ii)*le/2; end

IV
%___________________Normalização do deslocamento dy___________________ dy_norm=zeros(N,1);
for ii=1:5 dy_norm(:,ii)=dy(:,ii)/max(dy(:,ii)); end
%_____________Modos de vibração teóricos______________
dx=(0:1/50:8)'; v=zeros(351,1);
dx_norm=zeros(401,1);
for ii=1:401 dx_norm(ii,:)=dx(ii,:)/8; end
for ii=1:length(dx) v(ii,1)=sin(pi*dx(ii,1)/lb); v(ii,2)=sin(2*pi*dx(ii,1)/lb); v(ii,3)=sin(3*pi*dx(ii,1)/lb); v(ii,4)=sin(4*pi*dx(ii,1)/lb); v(ii,5)=sin(5*pi*dx(ii,1)/lb); end
%_________Gráfico dos vectores próprios/modos de vibração________
figure (3) ; plot(dx_center_norm,[-dy_norm(:,1) dy_norm(:,2) -
dy_norm(:,3)],'o','Linewidth',3);
hold on plot(dx_norm,[-v(:,1) -v(:,2) -v(:,3)]); hold off
xlabel('Posição ao longo da viga ','fontsize',16); ylabel('Deslocamento normalizado','fontsize',16);
figure (4) ; plot(dx_center_norm,[-dy_norm(:,4) dy_norm(:,5)],'o','Linewidth',3);
hold on plot(dx_norm,[-v(:,4) -v(:,5)]); hold off
xlabel('Posição ao longo da viga ','fontsize',16); ylabel('Deslocamento normalizado','fontsize',16);
V
A.3. Convergência de frequências [viga simplesmente apoiada] N=12;
[freq_N12] = xlsread('conv_frequencias.xlsx',1,'B17:K26'); [freq_N24] = xlsread('conv_frequencias.xlsx',1,'B30:K39'); [freq_N48] = xlsread('conv_frequencias.xlsx',1,'B43:K52'); [freq_N96] = xlsread('conv_frequencias.xlsx',1,'M17:V26'); [freq_N192] = xlsread('conv_frequencias.xlsx',1,'M30:V39');
% _________Ratio entre as frequências calculadas e exactas_________
ra=zeros(5,5);
% Valores de N (número de blocos)
% N=12
for ii=1:5; ra(ii,1)=freq_N12(ii,ii)/P(ii,ii); end
% N=24
for ii=1:5; ra(ii,2)=freq_N24(ii,ii)/P(ii,ii); end
% N=48
for ii=1:5; ra(ii,3)=freq_N48(ii,ii)/P(ii,ii); end
% N=96
for ii=1:5; ra(ii,4)=freq_N96(ii,ii)/P(ii,ii); end
% N=192
for ii=1:5; ra(ii,5)=freq_N192(ii,ii)/P(ii,ii); end
%________Gráfico de convergência de frequências (5 primeiras)________
N_blocks=[12 24 48 96 192]; % Array eixo x
figure(1); p1=plot(N_blocks,ra(1,:),'-o','Linewidth',1);
hold on; p2=plot(N_blocks,ra(2,:),'-o','Linewidth',1);
VI
p3=plot(N_blocks,ra(3,:),'-o','Linewidth',1); p4=plot(N_blocks,ra(4,:),'-o','Linewidth',1); p5=plot(N_blocks,ra(5,:),'-o','Linewidth',1); hold off;
axis([0 192 0.98 1.005]); xlabel('Número de blocos, N','fontsize',16); ylabel('Frequência calculada/Frequência exacta','fontsize',16);
A.4. Integração numérica considerando uma “breathing” crack [viga em consola]
%______________________Método de integração numérica_______________________
delta_t=Tn(1,1)/100; tf=0.3; t=0:delta_t:tf;
dy=zeros(size(t,1),N);
%____________________condições iniciais____________________
[initial_theta]=zeros(N-1,1); initial_dtheta_dt=zeros(N-1,1); initial=[initial_theta' initial_dtheta_dt'];
[t,theta]=ode45(@integ_function_N_20_breathing_crack, t,initial)
xlswrite('dy_in_time_20blocos_force_and_breathing_crack ',t,1); xlswrite('dy_in_time_20blocos_force_ and_breathing_crack',theta,2);
A.5. Função que realiza a Integração numérica considerando uma “breathing crack”
[viga em consola]
function dtheta_dt= integ_function_N_20_breathing_crack (t,theta)
N=39; % ________________________ diferenças de thetas __________________________
diff=theta(13)-theta(12);
if diff<0; % fenda aberta
[x]=[-65979938556.2421 51889494494.1928 -7060329387.93643 …];
[z]=[-4917939.87221657 3867569.20165926 -526239.709223004 …]; [y]=[-2.68009073690049e-12;-2.28082201631517e-12;-1.33289529452479e-12; …];
Fmax=10;
omega=91/2*2*pi;
Force=Fmax*sin(omega*t);
dtheta_dt=zeros(N,1);

VII
for ii=1:N dtheta_dt(ii)=theta(39+ii);
dtheta_dt(39+ii)=x(ii,1)*theta(1)+x(ii,2)*theta(2)+x(ii,3)*theta(3)+…
+x(ii,4)*theta(4)+x(ii,5)*theta(5)+x(ii,6)*theta(6)+…
+x(ii,7)*theta(7)+x(ii,8)*theta(8)+x(ii,9)*theta(9)+…
+x(ii,10)*theta(10)+x(ii,11)*theta(11)+x(ii,12)*theta(12)+…
+x(ii,13)*theta(13)+x(ii,14)*theta(14)+x(ii,15)*theta(15)+…
+x(ii,16)*theta(16)+x(ii,17)*theta(17)+x(ii,18)*theta(18)+…
+x(ii,19)*theta(19)+x(ii,20)*theta(20)+x(ii,21)*theta(21)+…
+x(ii,22)*theta(22)+x(ii,23)*theta(23)+x(ii,24)*theta(24)+…
+x(ii,25)*theta(25)+x(ii,26)*theta(26)+x(ii,27)*theta(27)+…
+x(ii,28)*theta(28)+x(ii,29)*theta(29)+x(ii,30)*theta(30)+…
+x(ii,31)*theta(31)+x(ii,32)*theta(32)+x(ii,33)*theta(33)+…
+x(ii,34)*theta(34)+x(ii,35)*theta(35)+x(ii,36)*theta(36)+…
+x(ii,37)*theta(37)+x(ii,38)*theta(38)+x(ii,39)*theta(39)+…
+z(ii,1)*theta(40)+z(ii,2)*theta(41)+z(ii,3)*theta(42)+…
+z(ii,4)*theta(43)+z(ii,5)*theta(44)+z(ii,6)*theta(45)+…
+z(ii,7)*theta(46)+z(ii,8)*theta(47)+z(ii,9)*theta(48)+…
+z(ii,10)*theta(49)+z(ii,11)*theta(50)+z(ii,12)*theta(51)+…
+z(ii,13)*theta(52)+z(ii,14)*theta(53)+z(ii,15)*theta(54)+…
+z(ii,16)*theta(55)+z(ii,17)*theta(56)+z(ii,18)*theta(57)+…
+z(ii,19)*theta(58)+z(ii,20)*theta(59)+z(ii,21)*theta(60)+…
+z(ii,22)*theta(61)+z(ii,23)*theta(62)+z(ii,24)*theta(63)+…
+z(ii,25)*theta(64)+z(ii,26)*theta(65)+z(ii,27)*theta(66)+…
+z(ii,28)*theta(67)+z(ii,29)*theta(68)+z(ii,30)*theta(69)+…
+z(ii,31)*theta(70)+z(ii,32)*theta(71)+z(ii,33)*theta(72)+…
+z(ii,34)*theta(73)+z(ii,35)*theta(74)+z(ii,36)*theta(75)+…
+z(ii,37)*theta(76)+z(ii,38)*theta(77)+z(ii,39)*theta(78)+…
+Force*y(ii);
end
else % fenda fechada
[x]=[-65979938556.2421 51889494494.1928 -7060329387.93643 …]; [z]=[-4917939.87221657 3867569.20165926 -526239.709223004 …]; [y]=[-2.68009073690049e-12;-2.28082201631517e-12;-1.33289529452479e-12; …];
Fmax=10; omega=91/2*2*pi;
Force=Fmax*sin(omega*t);
dtheta_dt=zeros(N,1);
for ii=1:N dtheta_dt(ii)=theta(39+ii);
dtheta_dt(39+ii)=x(ii,1)*theta(1)+x(ii,2)*theta(2)+x(ii,3)*theta(3)+…
+x(ii,4)*theta(4)+x(ii,5)*theta(5)+x(ii,6)*theta(6)+…
+x(ii,7)*theta(7)+x(ii,8)*theta(8)+x(ii,9)*theta(9)+…
+x(ii,10)*theta(10)+x(ii,11)*theta(11)+x(ii,12)*theta(12)+…
+x(ii,13)*theta(13)+x(ii,14)*theta(14)+x(ii,15)*theta(15)+…
+x(ii,16)*theta(16)+x(ii,17)*theta(17)+x(ii,18)*theta(18)+…
+x(ii,19)*theta(19)+x(ii,20)*theta(20)+x(ii,21)*theta(21)+…
+x(ii,22)*theta(22)+x(ii,23)*theta(23)+x(ii,24)*theta(24)+…
+x(ii,25)*theta(25)+x(ii,26)*theta(26)+x(ii,27)*theta(27)+…
+x(ii,28)*theta(28)+x(ii,29)*theta(29)+x(ii,30)*theta(30)+…

VIII
+x(ii,31)*theta(31)+x(ii,32)*theta(32)+x(ii,33)*theta(33)+…
+x(ii,34)*theta(34)+x(ii,35)*theta(35)+x(ii,36)*theta(36)+…
+x(ii,37)*theta(37)+x(ii,38)*theta(38)+x(ii,39)*theta(39)+…
+z(ii,1)*theta(40)+z(ii,2)*theta(41)+z(ii,3)*theta(42)+…
+z(ii,4)*theta(43)+z(ii,5)*theta(44)+z(ii,6)*theta(45)+…
+z(ii,7)*theta(46)+z(ii,8)*theta(47)+z(ii,9)*theta(48)+…
+z(ii,10)*theta(49)+z(ii,11)*theta(50)+z(ii,12)*theta(51)+…
+z(ii,13)*theta(52)+z(ii,14)*theta(53)+z(ii,15)*theta(54)+…
+z(ii,16)*theta(55)+z(ii,17)*theta(56)+z(ii,18)*theta(57)+…
+z(ii,19)*theta(58)+z(ii,20)*theta(59)+z(ii,21)*theta(60)+…
+z(ii,22)*theta(61)+z(ii,23)*theta(62)+z(ii,24)*theta(63)+…
+z(ii,25)*theta(64)+z(ii,26)*theta(65)+z(ii,27)*theta(66)+…
+z(ii,28)*theta(67)+z(ii,29)*theta(68)+z(ii,30)*theta(69)+…
+z(ii,31)*theta(70)+z(ii,32)*theta(71)+z(ii,33)*theta(72)+…
+z(ii,34)*theta(73)+z(ii,35)*theta(74)+z(ii,36)*theta(75)+…
+z(ii,37)*theta(76)+z(ii,38)*theta(77)+z(ii,39)*theta(78)+…
+Force*y(ii);
A.6. Gráfico de acelerações no tempo considerando uma “breathing crack” [viga
em consola]
[theta] = xlsread('integ_breathing_crack',3,'A1:AM26446'); [theta_vel] = xlsread('integ_breathing_crack',3,'AN1:BZ26446'); [tempo] = xlsread('integ_breathing_crack',2,'A1:A26446');
diff_theta=zeros(size(t,2),1);
theta_accel=zeros(size(theta,1),N-1); y_accel=zeros(size(theta_accel,1),size(theta_accel,2));
for jj=1:size(t,2)
diff_theta (jj,1)=theta(jj,13)-theta(jj,12);
if diff_theta (jj,1)<0; % fenda aberta
[x]=[-65979938556.2421 51889494494.1928 -7060329387.93643 …];
[z]=[-4917939.87221657 3867569.20165926 -526239.709223004 …]; [y]=[-2.68009073690049e-12;-2.28082201631517e-12; …];
Fmax=10; omega=91/2*2*pi;
Force=Fmax*sin(omega*time);
theta_accel(jj,:)=x*theta(jj,:)'+z*theta_vel(jj,:)'+y*Force(jj,:);
y_accel(jj,1)=theta_accel(jj,1)*ln/2;
y_accel(jj,2)=y_accel(jj,1)+theta_accel(jj,1)*ln/2+theta_accel(jj,2)*
ln/2;
for ii=3:N-1
y_accel(jj,ii)=y_accel(jj,ii-1)+theta_accel(jj,ii-1)*
*ln/2+theta_accel(jj,ii-1)*ln/2; end
IX
y_accel(jj,N)=y_accel(jj,N-1)+theta_accel(jj,N-1)*le/2;
else % fenda fechada
[x]=[-65979938556.2421 51889494494.1928 -7060329387.93643 …]; [z]=[-4917939.87221657 3867569.20165926 -526239.709223004 …]; [y]=[-2.68009073690049e-12;-2.28082201631517e-12; …]; Fmax=10;
omega=91/2*2*pi;
Force=Fmax*sin(omega*time);
theta_accel(jj,:)=x*theta(jj,:)'+z*theta_vel(jj,:)'+y*Force(jj,:);
y_accel(jj,1)=theta_accel(jj,1)*ln/2;
y_accel(jj,2)=y_accel(jj,1)+theta_accel(jj,1)*ln/2+theta_accel(jj,2)*
ln/2;
for ii=3:N-1
y_accel(jj,ii)=y_accel(jj,ii-1)+theta_accel(jj,ii-1)*
*ln/2+theta_accel(jj,ii-1)*ln/2; end y_accel(jj,N)=y_accel(jj,N-1)+theta_accel(jj,N-1)*le/2; end end
figure (1); plot(time, y_accel(:,40));
xlabel('Tempo (s)','FontSize',20); ylabel('Aceleração (m/s^2)','FontSize',20); axis([0.2 0.3 -200 200]);