
Apostila Controle - 01 - Introdução
28
Controle de Sistemas Mecânicos Controle de Sistemas Mecânicos Metodologia do curso Sistemas de controle Controle de Sistemas Mecânicos Malha aberta Malha fechada Realimentação Exercícios
Transcript of Apostila Controle - 01 - Introdução
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 1/28
Controle de Sistemas Mecânicos Controle de Sistemas Mecânicos
Metodologia do curso
Sistemas de controle
Controle de Sistemas Mecânicos
Malha aberta Malha fechada
Realimentação
Exercícios
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 2/28
Metodologia do curso Metodologia do curso
Objetivos
Conteúdo
Avaliação
Controle de Sistemas Mecânicos
Cronograma
Uso do Ensino Aberto
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 3/28
Objetivos Objetivos
Transmitir o conhecimento básico da área de controle de
sistemas lineares no tempo contínuo
Envolve o controle clássico baseado no uso de funções detransferência e uma introdução ao controle moderno com
Controle de Sistemas Mecânicos
ase na rea men aç o e es a os
Serão estudadas várias aplicações ao longo do curso,voltadas principalmente para sistemas mecânicos e eletro-mecânicos
Como ferramenta computacional de simulação e análise, oprograma MATLAB/Simulink serão usados diariamente.
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 4/28
Conteúdo Conteúdo
O conteúdo envolve a análise de sistemas e o projeto de
controladores fazendo uso da modelagem dinâmica docomportamento de sistemas lineares de parâmetrosconcentrados com coeficientes invariantes no tempo
Serão estudados modelos de estado e de entrada/saída,
Controle de Sistemas Mecânicos
bem como técnicas de avaliação do desempenho desistemas no domínio do tempo e da freqüência
Serão analisados os principais tipos de controladoresutilizados tradicionalmente, bem como introduzidos oscontroladores mais modernos
Serão apresentados métodos de projeto de sistemas decontrole, baseados em função de transferência e emmodelagem de estado.
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 5/28
Avaliação Avaliação
Serão ministradas 60 horas de aulas, em 15
semanas
A avaliação será realizada através de duas provas
Serão fornecidas listas de exercícios
Controle de Sistemas Mecânicos
periodicamente, cuja solução é altamenterecomendada.

5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 6/28
Bibliografia Bibliografia
1. Engenharia de Controle Moderno, K. Ogata, Prentice Hall, 1982
2. Sistemas de Controle e Realimentação, Charles L. Phillips eRoyce D. Harbor, Makron Books, 1996.
3. Linear Systems, Naresh K. Sinha, John Wiley, 1991
4. Automatic Control Systems, B. C. Kuo, Prentice Hall, 1991
Controle de Sistemas Mecânicos
5. Linear Control Systems, Modeling, Analysis and Design, J. R.Rowland, John Wiley, 1986.
6. Feedback Control of Dynamics Systems, G. F. Franklin. J. D.Powell e A. Naeini, Addison-Wesley, 1991
7. Sistemas de Controle Modernos, R. C. Dorf e R. H. Bishop,
LTC Editora, 19988. Notas de aula: Controle de Sistemas Mecânicos e Eletro-
Mecânicos, E. G. O. Nóbrega
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 7/28
Sistema Sistema
Um sistema é um conjunto de objetos agrupados de forma
organizada de modo a realizar um determinado propósito
Um sistema pode em geral ser dividido em sub-sistemas ,
Controle de Sistemas Mecânicos
ca a um por sua vez um sistema
Planta ou processo é um sistema que se deseja controlar
Controlador é o sub-sistema que realiza a função de controlar a planta
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 8/28
Representação de Sistemas Representação de Sistemas
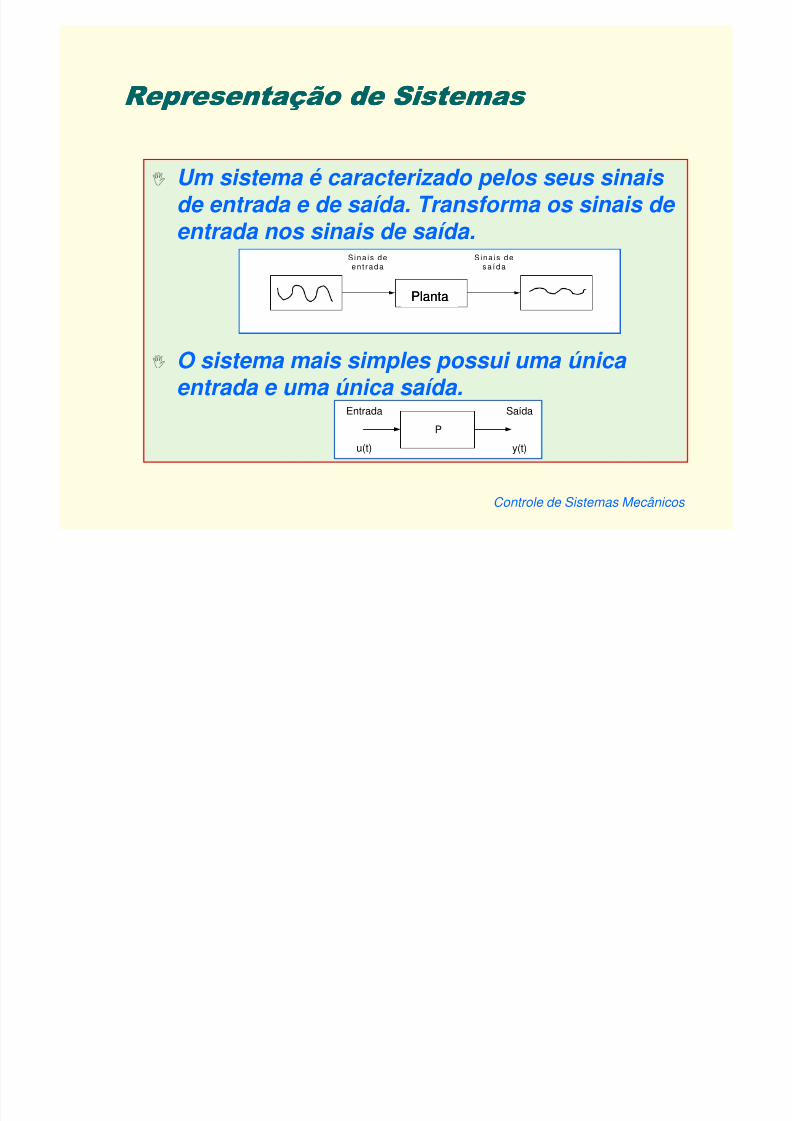
Um sistema é caracterizado pelos seus sinais
de entrada e de saída. Transforma os sinais de entrada nos sinais de saída.
S ina is deen t rada
S ina i s des a íd a
Controle de Sistemas Mecânicos
O sistema mais simples possui uma única
entrada e uma única saída.P
u(t) y(t)
SaídaEntrada
P r o c e s s oPlantaPlanta
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 9/28
Sistemas de Controle Sistemas de Controle
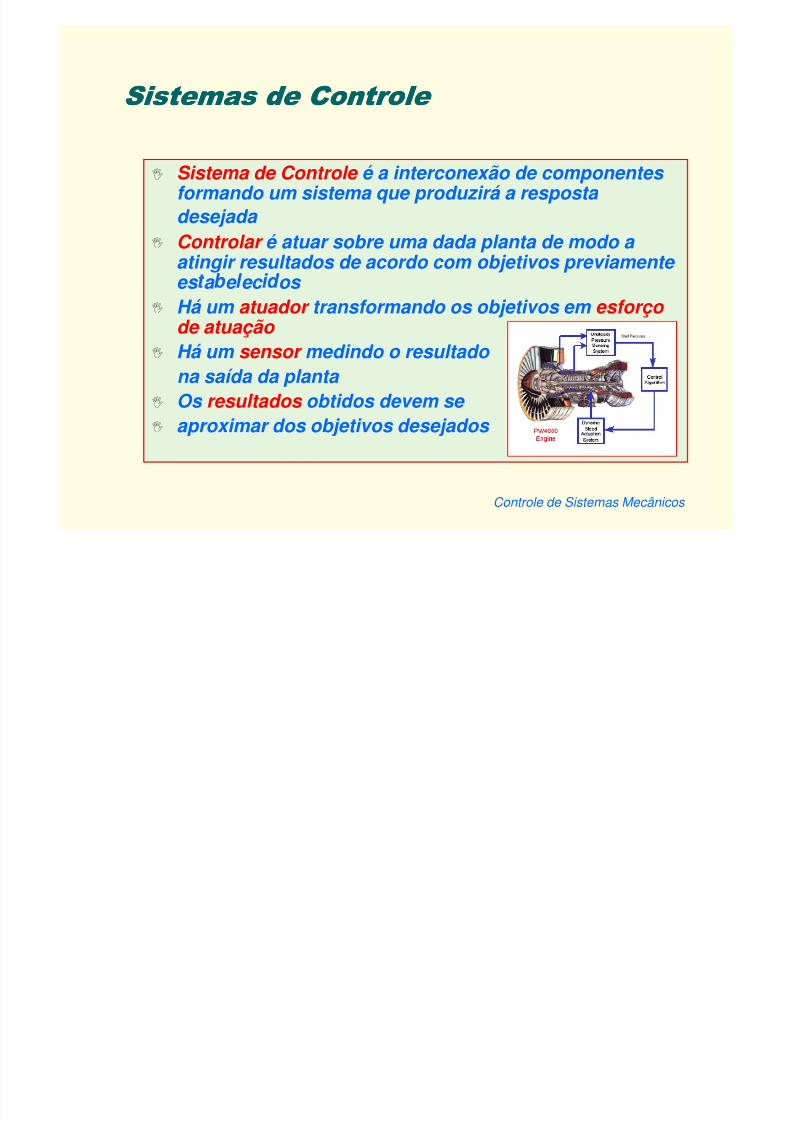
Sistema de Controle é a interconexão de componentes
formando um sistema que produzirá a resposta desejada
Controlar é atuar sobre uma dada planta de modo a atingir resultados de acordo com objetivos previamente
Controle de Sistemas Mecânicos
es a e ec os
Há um atuador transformando os objetivos em esforço de atuação
Há um sensor medindo o resultado
na saída da planta
Os resultados obtidos devem se
aproximar dos objetivos desejados
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 10/28
Classificação Sistema de Controle Classificação Sistema de Controle
Existem dois tipos de sistema de controle :
• Sistema de Controle em malha aberta (MA)
consiste em ajustar manualmente a ação do atuador de modo a se conseguir o resultado desejado, em
Controle de Sistemas Mecânicos
• Sistema de Controle em malha fechada (MF)
consiste em realizar uma medição do resultado e corrigir de forma automática a atuação de modo a diminuir o erro entre o desejado e o obtido
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 11/28
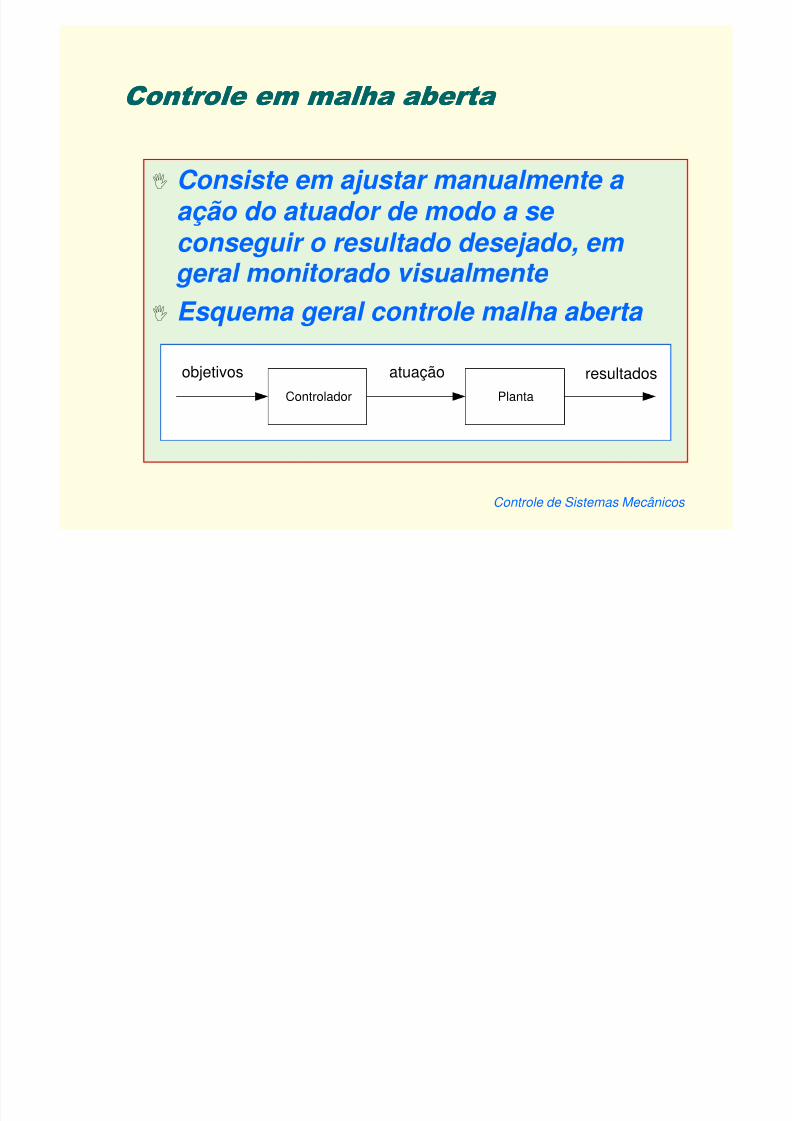
Controle em malha aberta Controle em malha aberta
Consiste em ajustar manualmente a ação do atuador de modo a se conseguir o resultado desejado, em
Controle de Sistemas Mecânicos
Esquema geral controle malha aberta
PlantaControlador
atuaçãoobjetivos resultados
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 12/28
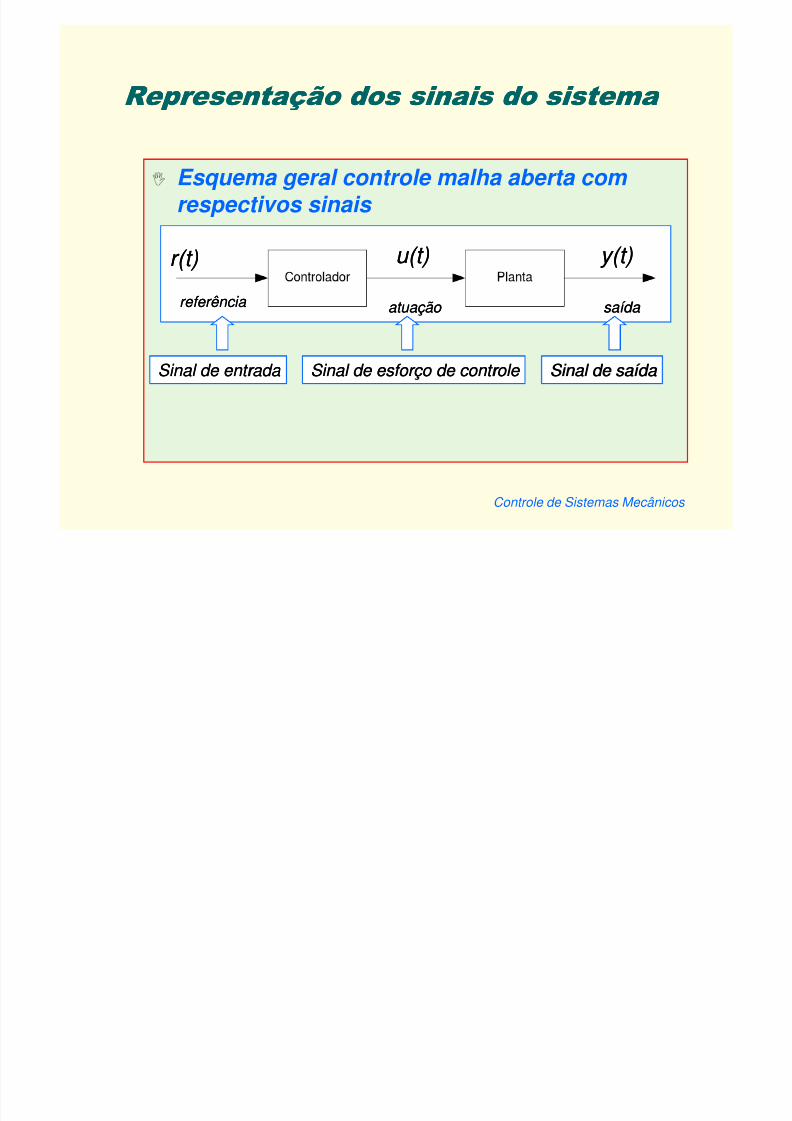
Representação dos sinais do sistema Representação dos sinais do sistema
Esquema geral controle malha aberta com
respectivos sinais
atuaçãoobjetivos resultadosr(t)r(t) u(t)u(t) y(t)y(t)
Controle de Sistemas Mecânicos
referência referência atuação atuação saída saída
Sinal de entrada Sinal de entrada Sinal de esforço de controle Sinal de esforço de controle Sinal de saída Sinal de saída
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 13/28
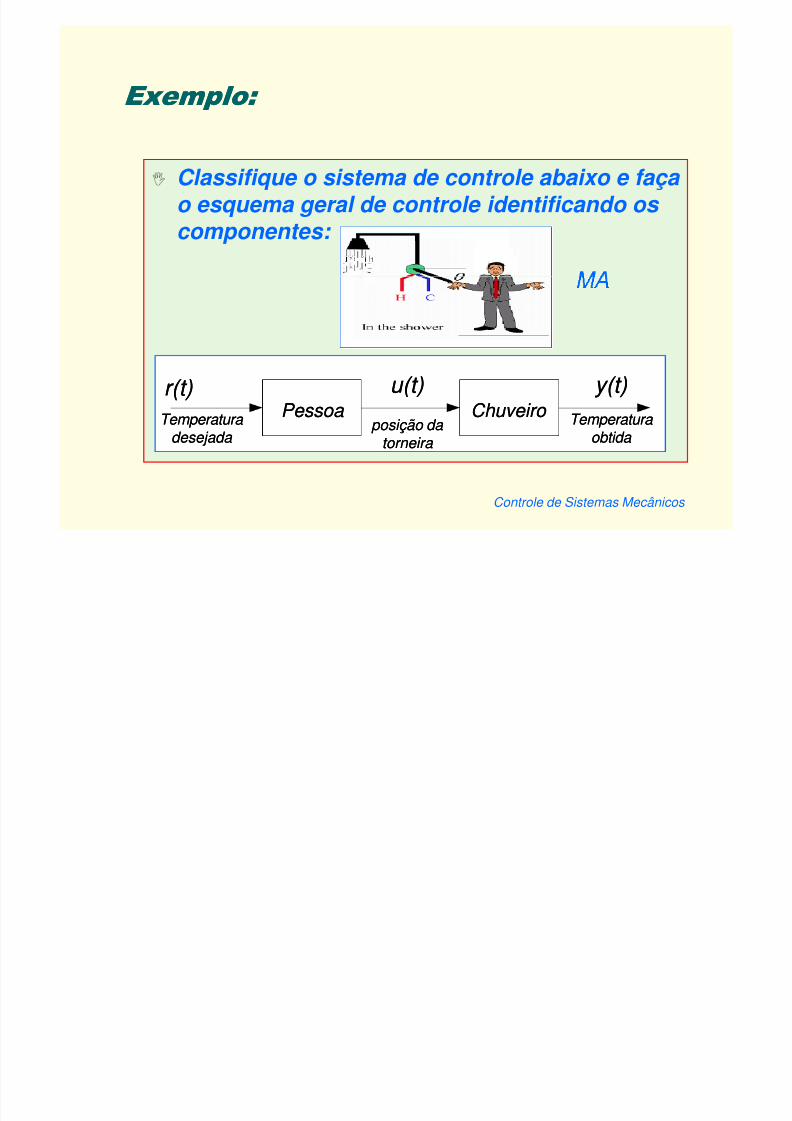
Exemplo: Exemplo:
Classifique o sistema de controle abaixo e faça
o esquema geral de controle identificando os componentes:
Controle de Sistemas Mecânicos
PlantaControlador
atuaçãoobjetivosresultadosr(t)r(t) u(t)u(t) y(t)y(t)Pessoa Pessoa Chuveiro Chuveiro
Temperatura Temperatura desejada desejada
posição da posição da torneira torneira
Temperatura Temperatura obtida obtida
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 14/28
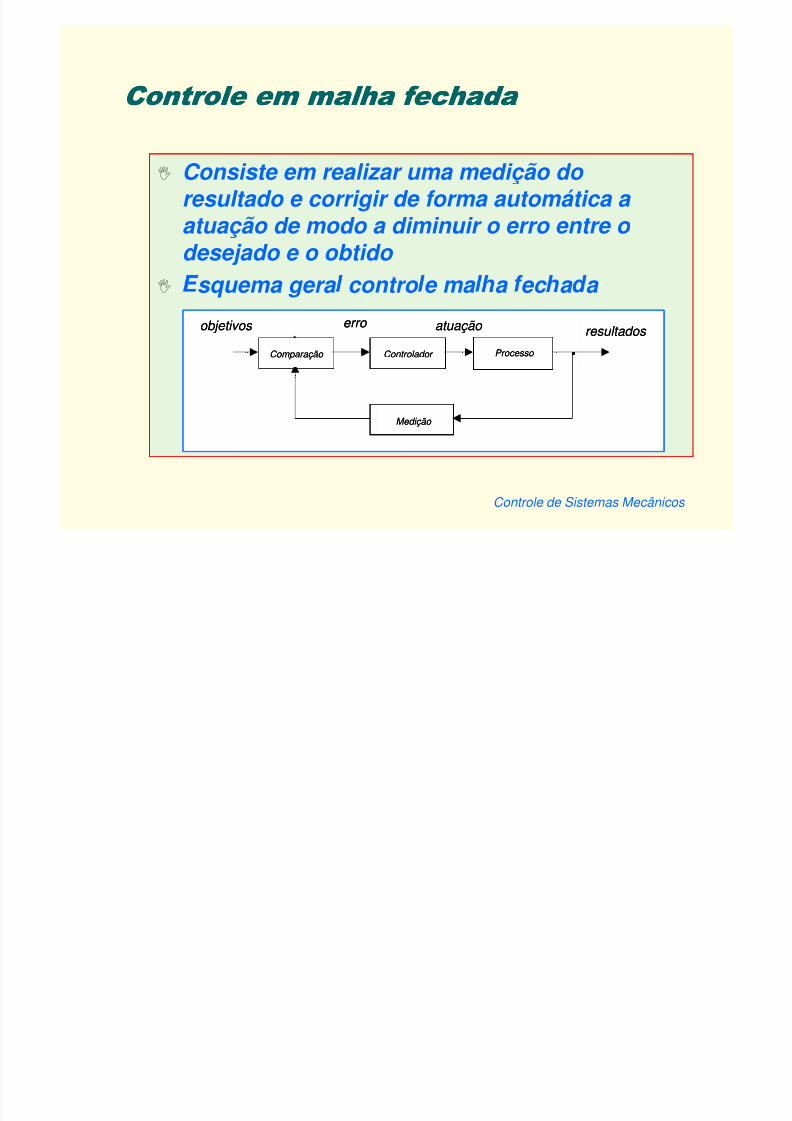
Controle em malha fechada Controle em malha fechada
Consiste em realizar uma medição do
resultado e corrigir de forma automática a atuação de modo a diminuir o erro entre o desejado e o obtido
Controle de Sistemas Mecânicos
squema gera contro e ma a ec a a
1
1
1
1
1
1
1
1
1
1
1
In1
Comparação Comparação Controlador Controlador Processo Processo
Medição Medição
objetivos objetivos erro erro atuação atuação resultados resultados
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 15/28
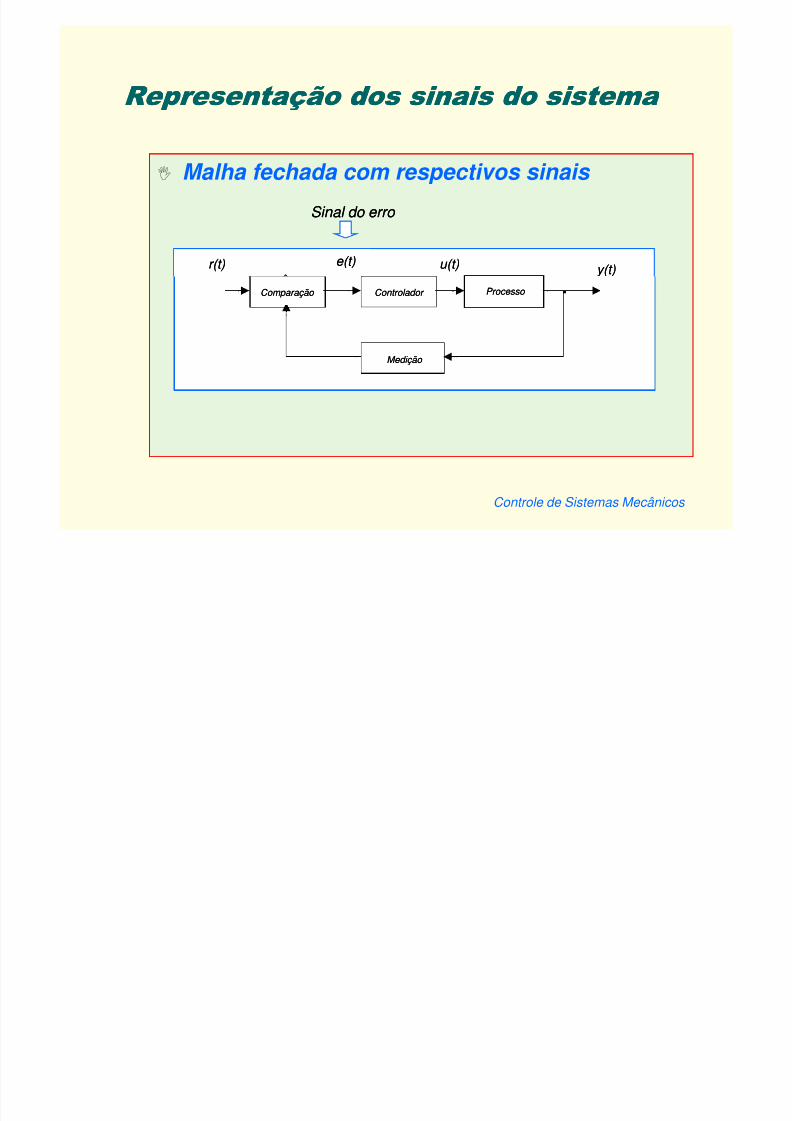
Representação dos sinais do sistema Representação dos sinais do sistema
Malha fechada com respectivos sinais
r(t)r(t) e(t)e(t) u(t)u(t) y(t)y(t)
Sinal do erro Sinal do erro
Controle de Sistemas Mecânicos
1
1
1
1
1
1
1
1
1
1
1
In1 Comparação Comparação Controlador Controlador Processo Processo
Medição Medição
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 16/28
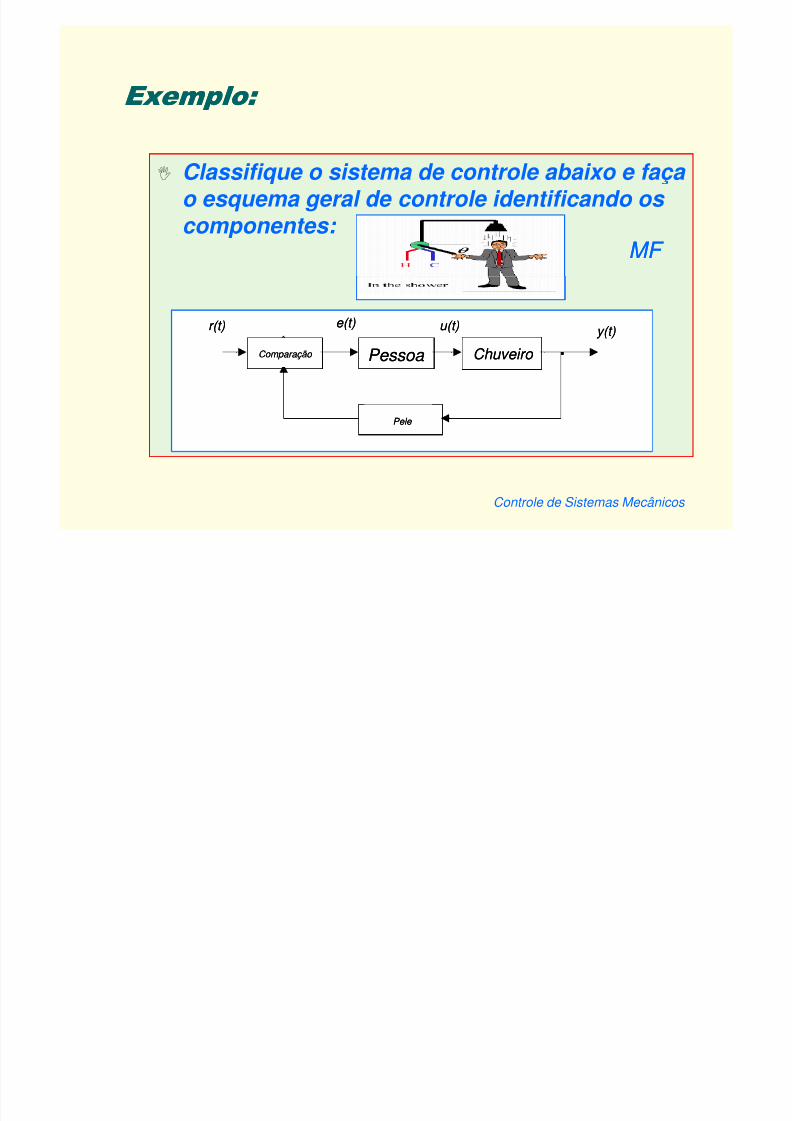
Exemplo: Exemplo:
Classifique o sistema de controle abaixo e faça
o esquema geral de controle identificando os componentes:
MF MF
Controle de Sistemas Mecânicos
1
1
1
1
1
1
1
1
1
1
1
In1
Comparação Comparação Controlador Controlador Processo Processo
Pele Pele
Pessoa Pessoa Chuveiro Chuveiro
r(t)r(t) e(t)e(t) u(t)u(t) y(t)y(t)
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 17/28
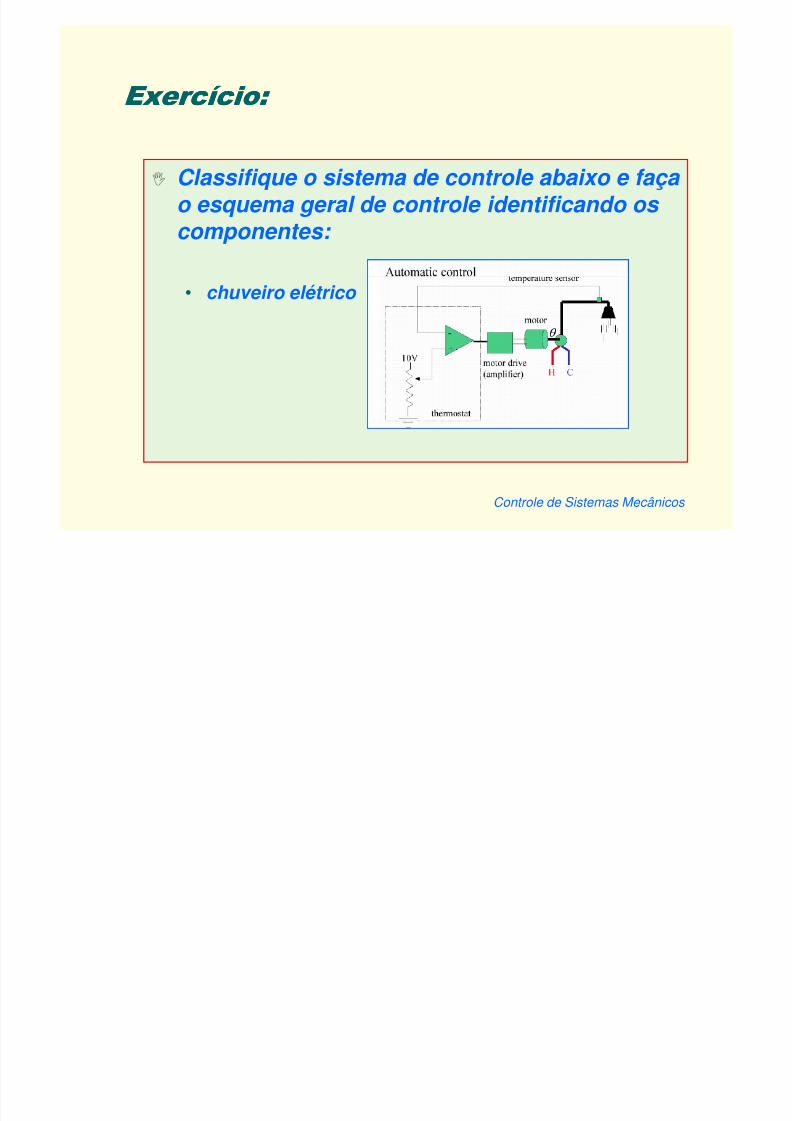
Exercício: Exercício:
Classifique o sistema de controle abaixo e faça
o esquema geral de controle identificando os componentes:
• disparo de uma flecha
Controle de Sistemas Mecânicos
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 18/28
Exercício: Exercício:
Classifique o sistema de controle abaixo e faça
o esquema geral de controle identificando os componentes:
Controle de Sistemas Mecânicos
• chuveiro elétrico
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 19/28
Exercício: Exercício:
Classifique o sistema de controle abaixo e faça
o esquema geral de controle identificando os componentes:
Controle de Sistemas Mecânicos
• torradeira de cozinha
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 20/28
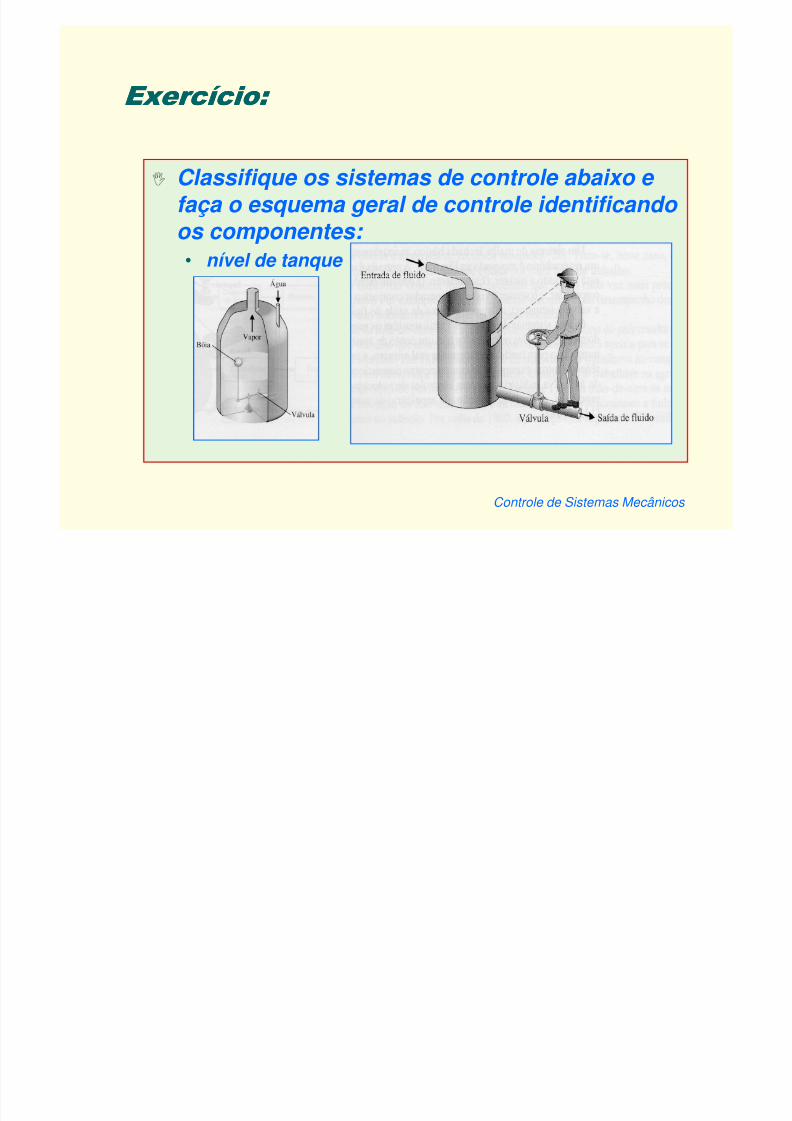
Exercício: Exercício:
Classifique os sistemas de controle abaixo e
faça o esquema geral de controle identificando os componentes:
• nível de tanque
Controle de Sistemas Mecânicos
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 21/28
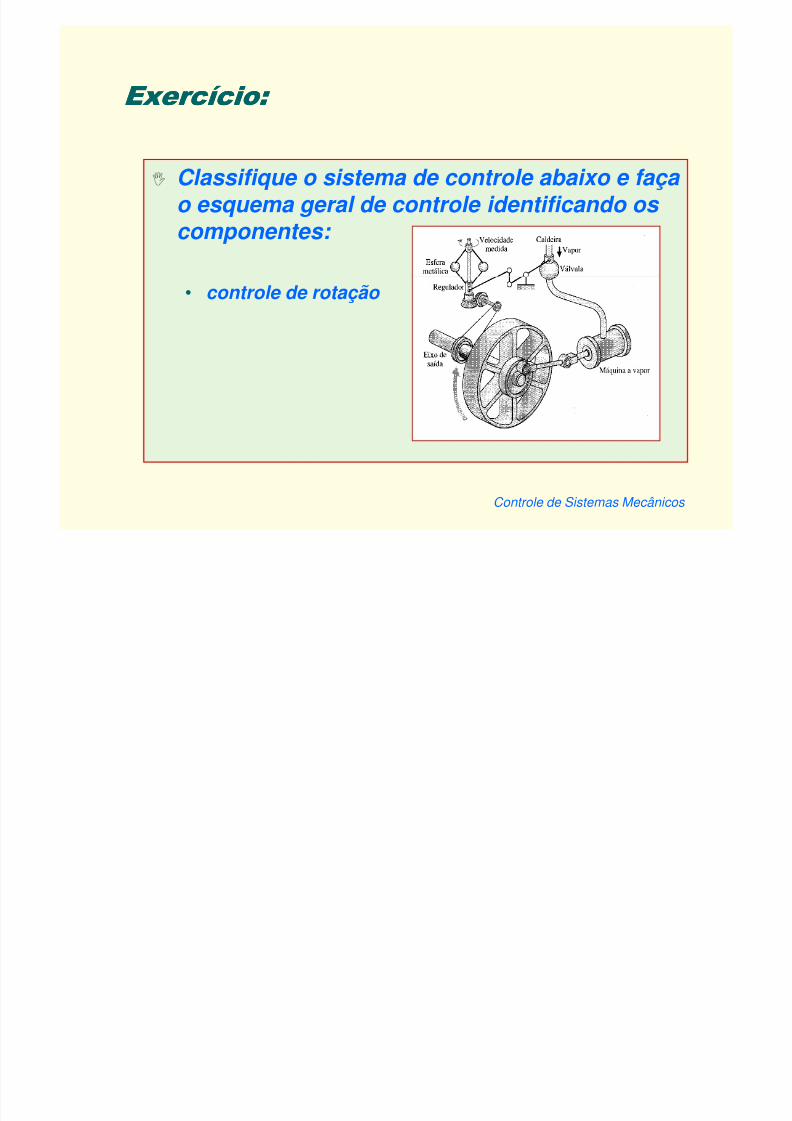
Exercício: Exercício:
Classifique o sistema de controle abaixo e faça
o esquema geral de controle identificando os componentes:
Controle de Sistemas Mecânicos
• controle de rotação
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 22/28
Exercício: Exercício:
Classifique o sistema de controle abaixo :
• ar condicionado
Controle de Sistemas Mecânicos

5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 23/28
Exercício: Exercício:
Classifique o sistema de controle abaixo e faça
o esquema geral de controle identificando os componentes:
• Controle de direção do automóvel
Controle de Sistemas Mecânicos
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 24/28
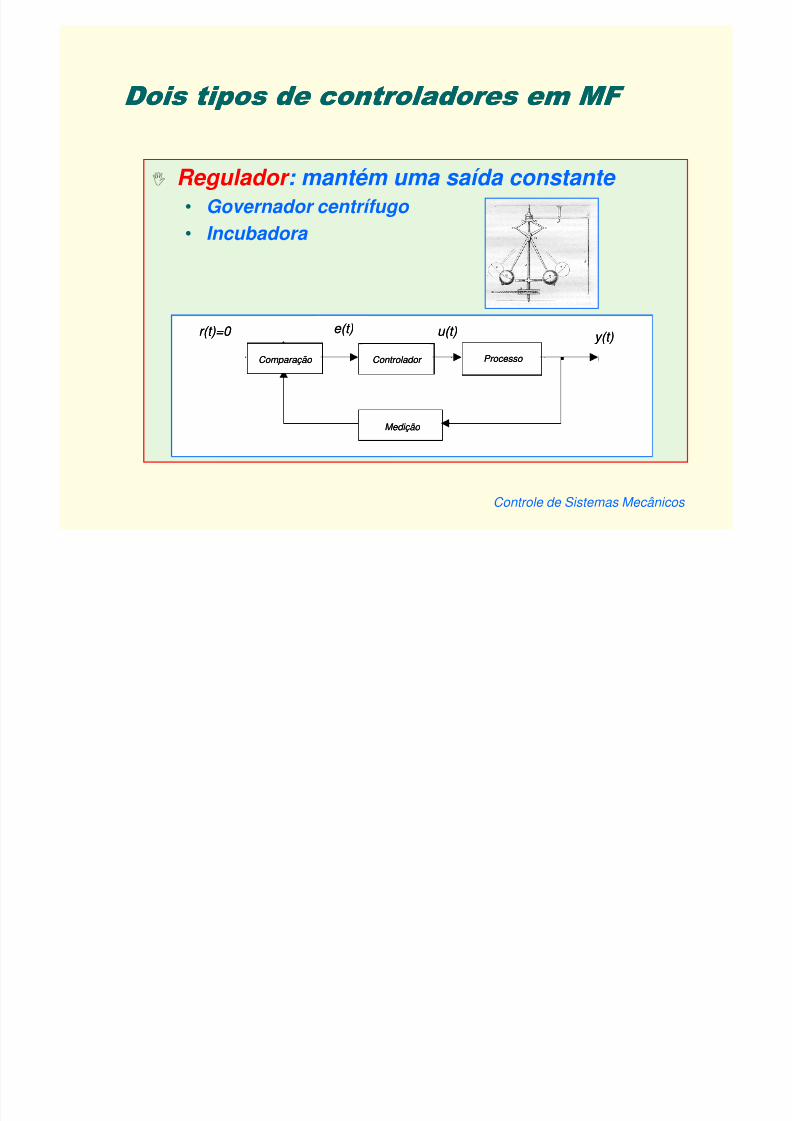
Dois tipos de controladores em MF Dois tipos de controladores em MF
Regulador : mantém uma saída constante
• Governador centrífugo
• Incubadora
Controle de Sistemas Mecânicos
1
1
1
1
1
1
1
1
1
1
1
In1
Comparação Comparação Controlador Controlador Processo Processo
Medição Medição
r(t)=0 r(t)=0 e(t)e(t) u(t)u(t) y(t)y(t)
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 25/28
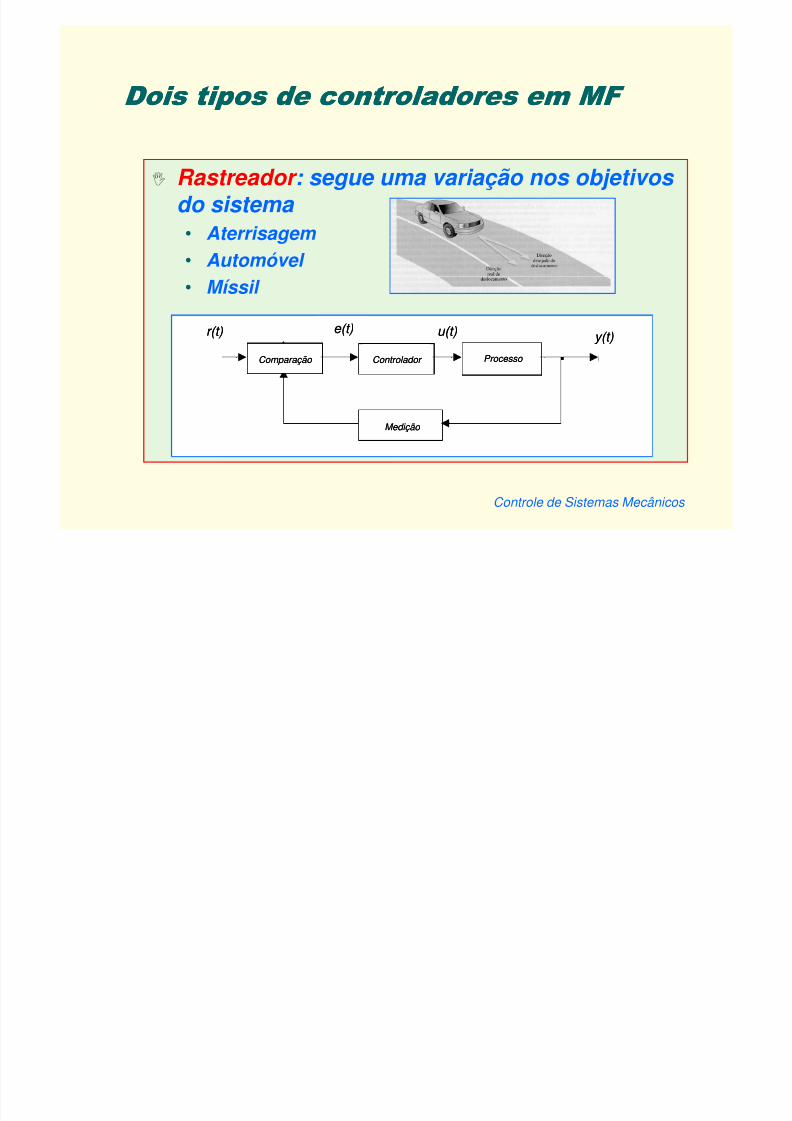
Dois tipos de controladores em MF Dois tipos de controladores em MF
Rastreador : segue uma variação nos objetivos
do sistema • Aterrisagem
• Automóvel
Controle de Sistemas Mecânicos
• Míssil
1
1
1
1
1
1
1
1
1
1
1
In1
Comparação Comparação Controlador Controlador Processo Processo
Medição Medição
r(t)r(t) e(t)e(t) u(t)u(t) y(t)y(t)
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 26/28
Realimentação negativa Realimentação negativa
O controle atua na planta de modo a anular a
diferença entre a referência e o resultado ao longo do tempo
Sistemas de controle
Controle de Sistemas Mecânicos
• Controle de temperatura
• Controle de nível
Sistemas naturais
• relação predador/presas
• temperatura do corpo/evaporação do suor
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 27/28
Realimentação positiva Realimentação positiva
A realimentação positiva tem que ser evitada
porque implica no aumento contínuo da energia do sistema, levando a situações limites. Ex: balanço
Controle de Sistemas Mecânicos
Os controladores portanto devem sempre implementar a realimentação negativa para evitar a instabilidade
O conceito de instabilidade é fundamental e
será apresentado formalmente no momento oportuno
5/7/2018 Apostila Controle - 01 - Introdução - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-01-introducao 28/28
Exercício: Exercício:
Defina:
• Realimentação negativa • Sinal de referência
• Sinal de atuação
•
Controle de Sistemas Mecânicos
• Sinal de saída • Sinal de erro
• Controlador rastreador
• Controlador regulador
• Planta • Controle de malha fechada

![Apostila de Controle Dimensional[1]](https://static.fdocumentos.com/doc/165x107/557211a9497959fc0b8f5018/apostila-de-controle-dimensional1.jpg)

![Apostila de Controle Perdas[1]](https://static.fdocumentos.com/doc/165x107/55cf97f5550346d03394ad41/apostila-de-controle-perdas1.jpg)














