Controle Temperatura Logica Fuzzy
67
UNIVERSIDADE FEDERAL DE OURO PRETO – UFOP ESCOLA DE MINAS – EM COLEGIADO DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO – CECAU CONTROLE FUZZY PI DE TEMPERATURA NUM MODELO DE EDIFICAÇÃO EM ESCALA REDUZIDA MONOGRAFIA DE GRADUAÇÃO EM ENGENHARIA DE CONTROLE E AUTOMAÇÃO IVES SOARES DE OLIVEIRA Ouro Preto, 2008
-
Upload
luis-gustavo-do-nascimento-silva -
Category
Documents
-
view
78 -
download
1
Transcript of Controle Temperatura Logica Fuzzy
UNIVERSIDADE FEDERAL DE OURO PRETO UFOP ESCOLA DE MINAS EM COLEGIADO DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAO CECAU CONTROLE FUZZY PI DE TEMPERATURA NUM MODELO DE EDIFICAO EM ESCALA REDUZIDA MONOGRAFIA DE GRADUAO EM ENGENHARIA DE CONTROLE E AUTOMAO IVES SOARES DE OLIVEIRA Ouro Preto, 2008 IVES SOARES DE OLIVEIRA CONTROLE FUZZY PI DE TEMPERATURA NUM MODELO DE EDIFICAO EM ESCALA REDUZIDA Monografiaapresentadaao Curso de Engenharia deControleeAutomaodaUniversidade Federal de Ouro Preto como parte dos requisitos paraaobtenodeGrauemEngenheirode Controle e Automao. Orientador: Henor Artur de Souza Co-orientador: Ronilson Rocha Ouro Preto Escola de Minas UFOP Julho / 2008 iiSUMRIO RESUMOiv ABSTRACT v IINTRODUO 1 1.1Descrio do problema 3 1.2Objetivo3 1.3Metodologia3 1.4Estrutura do trabalho4 IICONTROLE FUZZY5 2.1Lgica fuzzy vs. modelagem matemtica6 2.2Seleo do controlador correto8 2.3Aplicaes bem sucedidas de controle fuzzy10 IIIA LGICA FUZZY13 3.1Fundamentos da lgica fuzzy13 3.1.1O conjunto nebuloso13 3.1.2Funes de pertinncia14 3.1.3Definio matemtica de um conjunto nebuloso15 3.1.4Operadores lgicos15 3.1.5Regras se-ento17 3.2Inferncia em sistemas nebulosos17 3.2.1Fuzzificando as entradas18 3.2.2Aplicando os operadores nebulosos18 3.2.3Aplicando o mtodo de implicao20 3.2.4Agregando as sadas20 3.2.5Defuzzificando22 IVMODELO DO CONTROLADOR FUZZY PI23 4.1Inferncia nebulosa de Sugeno23 4.2Princpio matemtico do controlador fuzzy PI24 4.2.1Fuzzificao27 4.2.2Regras de controle fuzzy27 iii 4.2.3Defuzzificao28 4.3Validao do modelo32 4.4Sintonia do controlador fuzzy PI37 VESTUDO DE CASO39 5.1O objeto de estudo39 5.2Proposta do sistema de controle40 5.2.1Microcontrolador PIC16F877A42 5.2.2Sensor LM3543 5.2.3Cooler44 5.3Montagem do sistema de controle44 5.4Desenvolvimento do software de controle46 5.5Resultados obtidos47 VICONCLUSES52 VIIREFERNCIAS BIBLIOGRFICAS53 ANEXO I56 ivRESUMO O uso de aquecimento e/ou resfriamento artificiais de ar em edificaes consome uma grande quantidadedeenergiaemtodoomundo,especialmenteempasesdesenvolvidos,ondeas edificaes so responsveis por 1/3 da energia consumida. No Brasil, por exemplo, o uso do ar condicionado e a iluminao so responsveis por 48 % do consumo de energia eltrica no setordeedifcioscomerciaisepblicos.Dessemodoimportantequehajaumaintegrao entre um ambiente interno confortvel com um consumo mnimo de energia. Nesse contexto as tcnicas de controle utilizadas em ambientes, como o controle da temperatura e umidade do ar, desempenham um papel primordial, principalmente naqueles ambientes que necessitam de aquecimento e/ou resfriamento de ar. Neste trabalho estuda-se, implementa-se e analisa-se um sistema de controle fuzzy PI da temperatura interna de um ambiente construdo, visando obter condies adequadas deconforto ao usurio. Pormeio da lgica fuzzy possvel adicionara umcontroladorPIaexperinciadeumespecialistanoprocesso,obtendo-seumcontrolador fuzzyPI.OprincpiomatemticodocontroladorfuzzyPIdescritodetalhadamente objetivandoadeterminaodesualeidecontrole.Osistemadecontroleproposto implementado em tempo real, utilizando-se um modelo de uma edificao em escala reduzida. No projeto do sistema de controle utiliza-se um microcontrolador com a funo de calcular a entradanecessriaaoprocessoafimdeseobterascondiesadequadasdeconfortono ambienteconstrudo.Osistemadecontrolepropostoapresentoudesempenhoadequado, mostrando-serobustocomrelaosperturbaesimpostasintencionalmentenoambientee apresentando desempenho similar ao controlador PI. Palavras-chave: controle fuzzy, controle PI, controle inteligente, conforto trmico. vABSTRACT Theuseofartificialheatingand/oraircoolinginconstructionsconsumesagreatamountof energyinthewholeworld,incountriesespeciallydeveloped,wheretheconstructionsare responsible for 1/3 of the consumed energy. In Brazil, for example, the use of conditional air andtheilluminationareresponsiblefor48%oftheconsumptionofelectricenergyinthe sector of commercial and public buildings. In this manner it is important that it has integration between a comfortable internal environment with a minimum consumption of energy. In this context the used techniques of control in environments, as the control of the temperature and humidity of air, play a primordial role, mainly in those environments that need heating and/or air cooling. In this work it is studied, implemented and analyzed a fuzzy PI control system of the internal temperature of a constructed environment, aiming at to get adequate conditions of comfort to the user. Through the fuzzy logic is possible to add to a PI controller the experience of a specialist in the process, getting it a fuzzy PI controller. The mathematical principle of the fuzzyPIcontrollerisdescribedatgreatlengthobjectifyingthedeterminationofitscontrol law. The proposed control system is implemented in real time, using a model of a construction inreducedscale.Intheprojectofthecontrolsystemamicrocontroller(programmable integrated circuit) whose function is to calculate the necessary entry to the process in order to get the adequate conditions of comfort in the constructed environment. The proposed control systempresentedanadequateperformance,revealingrobustwithregardtothedisturbances imposedintentionallyintheenvironmentandpresentingsimilarperformancetothePI controller. Keywords: fuzzy control, PI control, intelligent control, thermal comfort. 1I. INTRODUO Oestudodoconfortoambientalenvolveasensaodebemestardoserhumanodentrodo ambienteconstrudo.Esteconfortoinfluenciadoporparmetrosclimticosexternos,tais comoaradiaosolareascaractersticasdoar,comoaumidaderelativa,apresso,a velocidadeeatemperatura,etambmpelascargastrmicasinternas,comoasatividades humanas, as lmpadas e os equipamentos. As condies internas de conforto de um ambiente soditadasbasicamentepelovalordatemperaturaeumidaderelativadoar(SOUZAetal, 2003). A avaliao do desempenho trmico de uma edificao consiste em verificar se as condies doambienteinternososatisfatriasquantoaoconfortotrmicoproporcionadoaos ocupantes. o bem-estar em um ambiente que determina o grau de satisfao e o conforto das habitaes.Sendoassim,umaedificaocomumcondicionamentodeficientee/ou inadequadoprovocanaspessoassintomasdesagradveis,taiscomocansao,desnimo,falta deconcentraonasatividadesdesempenhadasesadasfreqentesdolocaldetrabalho, levandoapessoaaumgraudeinsatisfaocomrelaoaoambienteondeseencontra (AKUTSU, 1998; TRIBESS et al, 1997; PINTO; SOUZA; FREITAS, 2001). NoBrasil,ascondiesclimticasdeverosopredominantese,portanto,aavaliao trmicanasedificaesdeveserequacionadaparaobter-seumconfortotrmicodas habitaes para este tipo de clima. Esta avaliao pode ser obtida de uma forma aproximada pormeiodeumamodelagemmatemticadastrocastrmicasnoscomponentesdas edificaes,considerandocondiespermanentes,comumaobservaoinlocodoambiente jconstrudoedeumaformamaisgeralpormeiodasimulaocomputacionaldo comportamento trmico de ambientes ainda no pr-projeto. O uso da simulao numrica para a avaliao do desempenho trmico de edificaes uma ferramenta importante, pois permite uma maior liberdade ao projetista na seleo dos elementos de fechamento a serem utilizados naedificao.Aanlisenumricapermiteaobtenodarespostaglobaledinmicadas edificaes em relao s interaes trmicas existentes. Para manter as condies desejadas de conforto humano no ambiente construdo, necessrio ousodeumsistemadecontrole,projetadoparaatenderospr-requisitosdeprojeto.Estes pr-requisitospodemestarrelacionados,porexemplo,manutenodatemperaturae/ou 2umidade do ambiente em torno de uma referncia estabelecida pelo projetista. No entanto, ao se projetar um sistema de controle, imprescindvel em algumas ocasies o conhecimento do modelomatemticodoprocesso.Porm,anaturezacompletamenteindiferenteaosnossos esforosemmodelarmatematicamenteseusprocessos,efreqentemente,possvelqueum operadorhumanosejacapazdecontrolardiversossistemassemcompreenderamatemtica, outodososdetalhesfsicosenvolvidos.Esseoperador,noentanto,inteligentementecapaz demanejarvariveisdeentradaqueinfluenciemassadasdoprocesso.Essacapacidadedo operador humano evidenciou um novo enfoque na teoria de processos (complexos) industriais ondeoconceitodeintelignciaartificial,pormeiodaemulaodecaractersticasdo comportamento humanono controle de processos surgiucomo umaalternativa decontrole e modelagem (SIMES; SHAW, 2007). Segundo Simes e Shaw (2007), a intelignciaartificial abrange uma famlia de ferramentas para utilizao em problemas complexos, e as tcnicas de controle fuzzy tm se mostrado bem fundamentadas e desenvolvidas. SegundoCheng(2001),ateoriadossistemasfuzzyabreumaperspectivaparalidarcom informaessubjetivasdeconfortohumano,provendomeiospararepresentaremanipular matematicamente os ndices qualitativos ou julgamentos subjetivos muito usados em estudos de conforto ambiental e resolver racionalmente os problemas de avaliao de desempenho de um dado ambiente construdo. Aocontrriodoscontroladoresconvencionaisemqueoalgoritmodecontroledescrito analiticamente por equaes algbricas ou diferenciais, por meio de um modelo matemtico, nocontrolefuzzyutilizam-sederegraslgicasnoalgoritmodecontrole,comaintenode descrever numa rotina aexperincia humana, intuio e heurstica para controlar o processo. Oscontroladoresnebulosossorobustosedegrandeadaptabilidade,incorporando conhecimentoqueoutrossistemasnemsempreconseguemacomodar(ZADEH1,1965,apud SANDRI; CORREA, 1999). Tambm so versteis, principalmente quando o modelo fsico complexo e de difcil representao matemtica (SANDRI; CORREA, 1999). 1ZADEH, L. A. Fuzzy Sets, Information and Control. 1965, v. 8, p. 338-353. 31.1. Descrio do problema O desafio deste trabalho desenvolver um sistema de controle fuzzy de temperatura capaz de manteratemperaturainternadoambienteemescalareduzidaemumvalorconstante.O controladorfuzzydesenvolvidoserbaseadoemumcontroladorPI,resultandoemum controlador fuzzy PI. Umcontroladordetemperaturadeveserutilizadocomafinalidadedemanteratemperatura do ambiente constante em um valor pr-estabelecido e realizar a compensao das perdas de calor do sistema para o meio ambiente. O sistema deve possuir um atuador de resfriamento de tal forma que fornea uma massa de ar necessria para a diminuio da temperatura interna do ambiente. 1.2. Objetivo Estudar, implementar e analisar um sistema de controle fuzzy PI de temperatura num modelo de edificao em escala reduzida. 1.3. Metodologia As tarefas desenvolvidas durante a pesquisa podem ser divididas em trs etapas: Formulao de uma base terica; Implementao prtica baseada na teoria; AnlisedosresultadosporcomparaodosistemadecontrolefuzzyPIcomum sistema de controle PI. A execuo do trabalho foi baseada no seguinte roteiro de atividades: Estudo de como desenvolver, na prtica, um sistema de controle nebuloso (fuzzy) que seja baseado em um controlador PI; 4Odesenvolvimentodosistemadecontrolefoidivididoemtrsetapasrealizadasna seguinteordem:obtenodaleidecontroledocontroladorfuzzyPI,validaodo modelo do controlador e montagem do sistema de controle; Sintonia do controlador; Coleta das respostas da planta por um sistema de aquisio de dados; Anlise dos resultados obtidos. 1.4. Estrutura do trabalho Para uma melhor compreenso do trabalho, a monografia foi dividida em 6 captulos e mais a lista de referncias bibliogrficas e um anexo. NoCaptulo1apresenta-seumaintroduo,umadescriodoproblemapropostoeuma apresentao dos objetivos e da metodologia adotada para o desenvolvimento do trabalho. NoCaptulo2apresenta-seumabreveintroduosobrecontrolenebulosoeaborda-seo problemadesemodelarmatematicamentesistemasreaisequandoseutilizarcontrole nebuloso, e apresenta-se algumas aplicaes bem sucedidas de controle fuzzy. NoCaptulo3aborda-seosfundamentosdalgicafuzzyenoCaptulo4versa-sesobreo sistema de controle desenvolvido, seus componentes, sua montagem, o modelo matemtico do controlador, e o desenvolvimento do software de controle. No Captulo 5 apresenta-se os resultados obtidos e como se os obteve e no Captulo 6 tm-se as concluses do trabalho. Finalmente apresenta-e as referncias bibliogrficas e um anexo apresentando o cdigo fonte do software desenvolvido para o microcontrolador. 5II. CONTROLE FUZZY Ossistemasdecontrolefornecemrespostaaumadeterminadaentradadeacordocomsua funodetransferncia.Osassimchamadossistemasinteligentessoaquelesquefornecem respostas que solucionam problemas, em situaes at mesmo novas ou inesperadas, fazendo comqueocomportamentodestessistemassejanico,podendoatserconsideradocriativo (SIMES; SHAW, 2007). Atopresentemomento,acapacidadecriativadossereshumanosestmuitoalmda possibilidadedesoluoqueasmquinascomputacionaisproporcionam,devidoaofatode queaspessoasraciocinamdeformaincerta,imprecisa,difusaounebulosa,enquantoqueas mquinasecomputadoressomovidosporraciocnioprecisoebinrio.Aeliminaodetal restriofariacomqueasmquinasfosseminteligentes,isto,pudessemraciocinarda mesmamaneiraimprecisa,comoossereshumanos.Talformaderaciocniochamadaem ingls por fuzzy e utilizada como sinnimo de incerto, impreciso, difuso ou nebuloso. A caracterstica especial da lgica fuzzy (tambm referida como lgica nebulosa e em alguns casosporteoriadepossibilidades)aderepresentarumaformainovadorademanuseiode informaesimprecisas.Algicafuzzyprovummtododetraduzirexpressesverbais, vagas, imprecisas e qualitativas, comuns na comunicao humana em valores numricos. Isso abreasportasparaseconverteraexperinciahumanaemumaformacompreensvelpelos computadores.Assim,atecnologiapossibilitadapelalgicafuzzytemumimensovalor prtico, tornando possvel a incluso da experincia de operadores humanos e/ou especialistas emumprocesso,osquaiscontrolamprocessoseplantasindustriais,emcontroladores computadorizados,possibilitandoestratgiasdetomadasdedecisoemproblemas complexos. A teoria fuzzy pode tambm ser agregada aos sistemas de redes neurais, os chamados sistemas neurofuzzy,queaumentamacapacidadedeaprendizadopormeiodeinterfacecomdados numricos.Informaesvagas,incertas,qualitativas,comunicaesverbais,capacidadede aprendizado e de formulao de estratgias de tomada de deciso so caractersticas humanas, portanto,ateoriafuzzy,redesneuraiseredesneurofuzzysofreqentementereferidascomo inteligentes,devidoafatodeemularemaintelignciahumana.Osucessomundialmente reconhecido,desistemasdemodelagemecontrolebaseadosemlgicafuzzy,emaplicaes 6industriais, tem comprovado sua utilizao como mais uma ferramenta (ou tecnologia) para as disciplinas de engenharia de controle industrial, manufatura, comunicao homem-mquina e em sistemas de tomadas de deciso. 2.1. Lgica fuzzy vs. modelagem matemtica Oenfoquetradicionalmenteutilizadoemengenhariadecontroleodeseobterummodelo idealizadodoprocessoasercontrolado,geralmentenaformadeequaesdiferenciaisou equaesdediferena.Parataisdescriesnormalmenteseutilizamdetransformadasde LaplaceouZ.Comointuitodeseobtermodelosmatemticossimples,certasrestriesso feitas; assumindo-se, por exemplo, que o processo linear, ou seja, que variaes nas entradas produzemvariaesproporcionaisnassadas.Aoseassumirapropriedadedelinearidade, pode-seutilizartcnicasextremamentepoderosaseconhecidasnareadeengenhariae tecnologia, com solues analticas ideais. Entretanto, sistemas no-lineares no possuem uma teoria geral para soluo analtica, e muitas vezes necessitam ser linearizados em torno de um pontodeoperao.Outrarestriomuitoutilizadaemanlisesdesistemaslinearesqueos parmetros de processo no se alteram, ou seja, que o sistema seja invariante no tempo, apesar denarealidadeocorrerdeterioraodoscomponentesdossistemascomopassardotempo, almdeimpactosambientais,taiscomoinflunciasdetemperaturaepresso.Devidoatais simplificaes, o projetista em geral encontra srias dificuldades no desenvolvimento de uma descrio matemtica significativa e realista de um processo industrial. Oparqueindustrialatualutiliza80%decontroladoresbaseadosemPID;jcontroladores multivariveiscomplexos,baseadosemcontrolemodernoavanado,tmmenor representatividade. Por outro lado, deve-se enfatizar que os controladores PID so lineares, e nosoadequadosparaaplicaesemplantasextremamenteno-lineares.Umaobservao feitarecentementeempesquisasobreoassuntoquenamaioriadasinstalaesindustriais atuaisoscontroladoresPIDnoestopropriamentesintonizados,tendosidoencontrados muitas vezes operando em modo manual. Uma anlise poderia ser feita para se concluir se os operadoresnoteriamperdidosuapacinciacomanecessidadedeconstantesreajustese sintonias,poisporsuaprprianaturezaoscontroladoresPIDnosoapropriadospara controlar plantas no-lineares, alm de no possibilitar uma interao com esses operadores. 7Certamente diversos desenvolvimentos tericos foram e tm sido relevantes para se alcanar o nveltecnolgicoatualnareadecontroleautomtico,naqualmuitascontribuiesforam feitasbaseadasnateoriadecontrolemoderno.Osqueaplicamtalconhecimentodevemser capazes de compreender processos estocsticos, lgebra multivarivel e processamento digital desinais,dentreoutrostpicos.Noentanto,oconhecimentonecessrioparaseprojetar, implementar e manter um sistema de controle desse porte est muito alm do que necessrio para se operar sistemas PID em plantas industriais. Na realidade, parece que os controladores PID representam exatamente o mximo da teoria compreensvel pela maioria dos operadores deplantasindustriais,enquantoqueequipamentosqueutilizamteoriadecontrole multivarivel necessitam de pessoal com um nvel maior de compreenso matemtica. Apropriedadefundamentaldecontroladoresinteligentes,especialmenteoscontroladores fuzzy, de serem baseados em experincia de operadores humanos e/ouespecialistas em um determinado processo industrial, em vez de utilizarem de modelos matemticos, fazendo com queotreinamentodeoperadoresetcnicosdemanutenosejamuitomaisfcilebarato,e pessoalmenosqualificadopossaserutilizadoparaoperarumaplantaindustrial.Essefator, por si s, pode se tornar um argumento poderoso ao sedecidir pelaadoo de controladores fuzzy em certas aplicaes especficas. Na metodologia convencional de projeto de sistemas de controle, FIG. 2.1, o que modelada aplantaouprocessoqueestsendocontrolado.Esseprocedimentochamadopor identificaodesistemas,ondeosistemaassumidocomolinear,ouaproximadamente linear,caracterizadoporumconjuntodeequaesdiferenciais,cujasoluoindicariaao controlador como os parmetros deveriam ser ajustados para um determinado comportamento dosistema(taiscomo,amortecimento,sobre-sinal,velocidadederesposta,tempode acomodao e erro em regime permanente). Poroutrolado,emmuitossistemasnoadequadosaocontroleautomtico,operadores humanosestosendoempregados,eametodologiadeprojetoestfocalizadano comportamentodosoperadores,isto,comoelesajustariamosparmetrosdecontrolepara um determinado conjunto de circunstncias. Por exemplo, em metodologia fuzzy o operador cujomodeloestsendoidentificado;enquantoeleestcontrolandoosistema,FIG.2.2. Assim, o controlador fuzzy, baseado no modelo identificado do operador humano, torna-se um modelo lgico da forma com que o operador raciocina ao manipular o sistema. 8 FIGURA 2.1 Identificao da dinmica do processo ou planta FONTE: SIMES; SHAW, 2007 FIGURA 2.2 Identificao do comportamento do operador de controle FONTE: SIMES; SHAW, 2007 2.2. Seleo do controlador correto A utilizao de controle inteligente no pode ser vista como uma soluo para o controle em todos os processos mais complexos, sendo incorreta a atitude de simplesmente trocar todos os controladoresconvencionaisporcontroladoresfuzzy.Hdiversasanlisesquedevemser feitas ao se decidir qual controlador deve ser utilizado (SIMES; SHAW, 2007). Se a planta ou o processo que est sendo controlado no completamente linear, porm a no linearidadeentreaentradaeasadaconhecidamenteumafunosuave,sem descontinuidades,ouseapesardoprocessosernolineareleoperaremumpontofixo,em torno do qual, variaes pequenas so lineares, a soluo com controladores PID ainda uma excelentesoluocusto/benefcio.Emtaiscondies,oscontroladoresPIDpodemcontrolar 9plantas, mesmo com dinmica desconhecida, uma vez que a componenteP representa oerro de realimentao instantneo, a componente I representa a integral do erro que contribui para ahistriapassadadarealimentaoeacomponenteDrepresentaaderivadadoerro,aqual tende a antecipar o comportamento futuro do erro de realimentao. Seosparmetrosdecadacomponentesosintonizadosparaodesempenhoespecficoda planta,aaodocontroladorsersatisfatria.Atarefadesintoniaimplicanamtua otimizaodecaractersticasderesposta,taiscomoamortecimento,sobre-sinal,tempode acomodaoeerroemregimepermanente.Apropriedadedelinearidade(ouquase-linearidade)garantequeastrsestratgiasindividuaisdecontrole(P+I+D)possamser combinadasemumaformaaditiva,fazendocomqueamalhaderealimentaoconsiga compensar,pormudanasnosparmetrosdaplanta,rudoealteraesambientais,enquanto que a ocorrncia de no-linearidade impe uma certa interao entre tais fenmenos, podendo tornardifcilasintonia,ouatmesmoimpossvel.AssimocontroladorPIDrepresentatrs estratgias de controle, que dinamicamente ajustam o comportamento do sistema por meio do erro da malha de realimentao. DevidoafatodoscontroladoresPIDseremdeentrada-nicaesada-nica,emaioriadas plantaseprocessosindustriaisseremmultivariveispornatureza,verifica-sequecada varivel controlada necessita de seu prprio controle e valor de referncia. Da a necessidade deumsistemadecontrolesupervisrio,capazdeajustarosvaloresderefernciaemvrias malhasdecontrole.Hdiversoscasosemqueamudananosetpoint(referncia)deveser feitabaseadaemdecisestomadaspelaobservaodassadasdosprocessos,tarefa tipicamente realizada por operadores humanos. Alm disso, muito freqente que processos e plantas possuam dinmica sujeita variao de parmetros, faixa de variao de variveis de controlemuitolarga,fazendocomqueospontosdeoperaosedesloquemdevidosessas caractersticas.NessecasooscontroladoresPIDnoconseguemfornecerumdesempenho satisfatrio. Uma das mais importantes caractersticas de controladores fuzzy a habilidade em se executar controlemultiobjetivos,mesmocomrequisiesconflitantes,deformaseobterumbom compromissonaestratgiadecontrole.Umexemplopodeserdado:umelevadordeuma ponte-rolante, muito utilizado para transporte de cargas em portos, onde o continer suspenso emumacorrentedevesertransferidodonavioparaumvagodeumtrem.Deumaforma 10simplificada, as duas variveis de entrada de tal controlador so: a distncia entre o navio e o vago,ongulodacorrenteondeacargasebalanar,enquantoqueavariveldesadaa potnciadomotorqueimpulsionaacargadesuaposioinicialatoseudestino.Um operadorhumanoobservaambasasvariveis,simultaneamente,eajustaavelocidadede transfernciapormeiodeumcontroladordomotor,deformaaseobterodeslocamentodo materialomaisrapidamentepossvel,emantendoongulodebalanodentrodelimites razoveis.Usando-sesensoresapropriados,umcontroladorfuzzydeduasentradaseuma sadacapazdeemularaaodecontrolemulti-objetivadooperadorhumano.Seriamuito difcilseutilizarumcontroladorPIDdeentradaesadanicas,paratalpropsitomulti-objetivo. SegundoSimeseShaw(2007),umnmeroconsiderveldecontroladoresfuzzyso atualmente utilizados em aplicaes operacionais, onde executam apenas algumas das funes deumcontroladorconvencional.Arazoqueosmicrocontroladorestmsetornadocada vez menores, mais poderosos, e fceis de serem programados, com programas que executam funes fuzzy em muitas aplicaes. 2.3. Aplicaes bem sucedidas de controle fuzzy OsfundamentostericosdosconjuntosnebulosospropostosporZadeh1(1965apud COELHO;ALMEDIA;COELHO,2003),comoumaformaalternativadesemodelar sistemascomplexosedifceisdeseremdescritosportcnicasconvencionais,motivaram inicialmenteavalidaodoscontroladoresnebulososporMamdanieAssilian2(1975apud COELHO; ALMEIDA; COELHO, 2003). Atualmente,umagrandevariedadedeprodutosindustriaisecomerciais,baseadosemlgica nebulosaestdisponvel.Exemplostpicosincluemprodutosdeconsumodiretotaiscomo mquinas de lavar roupas (Sanyo), mquinas de lavar louas (Hitachi), geladeiras (Sharp), ar condicionados(Mitsubishi),fornosdemicroondas(Sanyo),cmerasdevdeo(Canon, Panasonic),aspiradoresdep(Matsushita),etc.Naindstriaautomotivadestaca-se, transmissoautomtica(Nissan,Lexus),injeoeletrnica,suspensoativa,veculosauto- 1ZADEH, L. A. Fuzzy Sets, Information and Control. 1965, v. 8, p. 338-353. 2MAMDANI,E.;ASSILIAN,S.Anexperimentinlinguisticsynthesiswithafuzzylogic controller. International Journal of Man Machine Studies. 1975, v. 7, p. 1-13. 11guiadoserobsmveis(NASA,IBM),etc.Nalinhadeautomaopredialpode-secitaro controledegruposdeelevadores(Hitachi,Toshiba),controledemotores(Hitachi),sistema de ventilao de tneis urbanos (Toshiba), controle de trfego urbano e controle de partida e paradadetrensurbanosemetrs(Sendai,Tokio),etc(COELHO;ALMEIDA;eCOELHO, 2003). Outrasaplicaesbemsucedidasdecontrolenebulosopodemserencontradasnaliteratura: Chiu (1998) debate algumas maneiras de se utilizar controle nebuloso, tais como, em controle supervisrio,seleodeaesdiscretasdecontrole,entreoutras.Schwartzetal(1994) discutiram algumas aplicaes do controle nebuloso. Coelho, Almeida e Coelho (2003) citam asprimeirasaplicaesdecontroladoresnebulososeasatuais,inclusiveemcontroladores lgico programveis. Naliteratura,destacam-seaplicaesdalgicafuzzynocontrolederobsmanipuladores. Malki et al (1997) projetaram um controlador fuzzy PID no controle de uma junta flexvel em um brao robtico com caractersticas no-lineares e parmetros variveis, tornado-se assim o controledestebraoumtantocomplicado.Nesteexperimento,utilizaramdoismtodosde controle:controladorPIDconvencionalecontroladorfuzzyPID,ambossobasmesmas condies.OcontroladorPIDconvencionalfoiincapazdeguiarsatisfatoriamenteobrao robtico(comumacargano-linear)sobqualquercombinaoentreosganhosdecontrole. Umgrficodasadadosistema,comosganhosdocontroladorPIDqueproporcionaramos melhores resultados mostrado na FIG. 2.3. Entretanto, o controlador fuzzy PID controlou o sistemasatisfatoriamente,FIG2.4.Tang,CheneLu(2001)tambmaplicaramum controladorfuzzyemumbraorobtico;entretantotalcontroladornopossuiotermo derivativo(D),sendocaracterizadoporumcontroladorfuzzyPI.Deixandodeladoas aplicaesemrobs,Ying,SilereBuckley(1990)analisaramodesempenhodeum controlador fuzzy PI em sistemas lineares de primeira e segunda ordem, mas tambm em um sistema no-linear. 12 FIGURA 2.3 Desempenho do controlador PID convencional no sistema robtico FONTE: Adaptada de MALKI et al, 1997 FIGURA 2.4 Desempenho do controlador fuzzy PID no sistema robtico FONTE: Adaptada de MALKI et al, 1997 13III. A LGICA FUZZY 3.1. Fundamentos da lgica fuzzy A lgica fuzzy temacapacidade de a partir de informaes vagas, obter um valor numrico, quepossasertratadopeloscomputadores.Trata-sedeumalgicaquetrabalhacom raciocnios aproximados, ao invs de exatos, como se costuma na lgica clssica. Namatemticaclssica,osconceitosdevemserdefinidosdeformaclaraeprecisa.No entanto, no dia a dia isso nem sempre acontece. Os conceitos frio, quente, claro e escuro, por exemplo, so bem vagos. Dessa forma, com o intuito de representar essas informaes vagas e imprecisas,Zadeh1(1965apudCHENG,2001)propsoconceitodeconjuntosnebulosos (fuzzy sets) em 1965. 3.1.1. O conjunto nebuloso Formalmente, um conjunto nebuloso A do universo de discurso definido por uma funo de pertinncia[ ] 1 , 0 : A . Essa funo associa a cada elemento x de o grau( ) xA , com oqualxpertenceaA(ZADEH1,1965,apudSANDRI;CORREA,1999).Afunode pertinncia( ) xAindica o grau de compatibilidade entre x e o conceito expresso por A: ( ) 1 = xAindica que x completamente compatvel com A ( ) 0 = xAindica que x completamente compatvel com A ( ) 1 0 < < xAindica que x parcialmente compatvel com A, com grau( ) xA(3.1) UmconjuntoAdateoriadosconjuntosclssicapodeservistocomoumconjuntonebuloso especfico,denominadousualmentedecrisp,paraoqual{ } 1 , 0 : A ,ouseja,a pertinnciadotipotudoounada,simouno,enogradualcomoparaosconjuntos nebulosos. 1ZADEH, L. A. Fuzzy Sets, Information and Control. 1965, v. 8, p. 338-353. 14Comointuitodedeixarclaraadiferenaentreestesconceitos,considereoconceito adolescente. Um conjunto crisp no exprime completamente o conceito de adolescente, pois uma pessoa com 12 anos e 11 meses seria considerada completamente incompatvel com este conceito. J um conjunto nebuloso permite exprimir que qualquer pessoa com idade entre 13 e 17 anos um adolescente, acima de 19 ou abaixo de 11 no considerado adolescente, e no intervalo [11,13] (respectivamente [17,19]) considerado tanto mais adolescente quanto mais prxima de 13 (respectivamente de 17) sua idade. 3.1.2. Funes de pertinncia Uma funo de pertinncia uma curva que define o grau de pertinncia (valor entre 0 e 1) de cada entrada. Um dos exemplos mais comuns usados para exemplificar um conjunto nebuloso o conjunto das pessoas altas. Caso este conjunto seja clssico, pode-se dizer que as pessoas com mais de 1,80 m so consideradas como altas. Seria dessa forma um conjunto falho, haja vistaqueumapessoacom1,79mnoseriaconsideradaalta.Trata-sedemaisumexemplo em que a utilizao de conjuntos nebulosos de grande valia, FIG. 3.1. FIGURA 3.1 A funo de pertinncia altura Fonte: Adaptada de FUZZY, 1995 NacurvamostradanaFIG.3.1,oeixoverticalestrepresentadopelosgrausdepertinncia, definidosnointervalode0a1eoeixohorizontalrepresentaaalturadecadapessoa.A funodepertinnciarepresentadanointeriordoretngulo,sendoestaqueassociacada entrada (altura) com uma sada (grau de pertinncia). Observe que uma pessoa com um grau 15de pertinncia de 0,95 considerada alta, entretanto uma com um grau de 0,30 j dita como no to alta. 3.1.3. Definio matemtica de um conjunto nebuloso UmconjuntonebulosoAdoconjuntouniversalXdefinidopelasuafunodepertinncia ( ) xA . ( ) { } 1 0 , = = x X x AA (3.2) ( ) [ ] 1 , 0 : X xA(3.3) Afunodepertinncia( ) xA expressaograuqueumelementoxmembrodoconjunto nebuloso A. Quanto mais o valor de( ) xAse aproxima de 1, maior ser o grau de pertinncia do elemento ao conjunto A. Assimcomonocasodeconjuntosclssicos,definem-seaosconjuntosnebulososoperaes como unio e interseo de conjuntos nebulosos. Entretanto, para conjuntos nebulosos tem-se: X A AC (3.4) CA A (3.5) ondeACindicaocomplementodoconjuntoA,Xindicaoconjuntouniversoeindicao conjunto vazio. 3.1.4. Operadores lgicos Algicanebulosaumageneralizaodalgicabooleana,ouseja,mantendo-seograude pertinnciadecadaelementonosextremosde1(completamenteverdadeiro)e0 (completamente falso), a lgica booleana pode ser utilizada, FIG. 3.2. 16FIGURA 3.2 Os operadores lgicos aplicados na lgica clssica Fonte: FUZZY, 1995 Deve-se lembrar que nalgica fuzzyasentradasassumem valores entre 0 e 1. Dessa forma, deve-seusarumafunoquepreserveosresultadosconformemostradosnaFIG.3.2, fazendo-se assim uma generalizao da lgica booleana. ParaooperadorAND(E),usa-seooperadormin(mnimo).Issoresolveoproblemada sentena A AND B, onde A e B so limitados pelo intervalo (0,1). Usando o mesmo raciocnio, substitui-se o operador OR (OU) pelo operador max (mximo). Finalizando, a operao NOT A (NO A) equivalente operao 1-A, FIG. 3.3. FIGURA 3.3 Os operadores lgicos aplicados na lgica nebulosa Fonte: FUZZY, 1995 173.1.5. Regras se-ento Osconjuntosnebulosos(fuzzysets)eosoperadoresnebulosos(fuzzyoperators)sousados juntamentecomasregrasdotipose-entoparaformularassentenasfundamentaisao raciocnio nebuloso. Uma simples regra do tipo se-ento assume a seguinte forma, se x A ento y B(3.6) onde A e B so valores lingsticos definidos pelos conjuntos nebulosos nos universos X e Y, respectivamente. A parte se da regra, ou seja, x A denominada antecedente enquanto a parte ento, ou seja, y B chamada de conseqente. Observe a frase, Se o servio bom ento a gorjeta mediana.(3.7) Apalavrabomrepresentadacomoumnmeroentre0e1,ouseja,oantecedenteuma interpretao que retorna um nmero entre 0 e 1. J a palavra mediana representada como umconjuntonebulosoeassim,oconseqentedesignaoconjuntonebulosoBvarivelde sada y. Emgeral,aentradadeumaregradotipose-entoovaloratualparaavariveldeentrada (nesse caso, servio) e a sada um conjunto nebuloso (nesse caso, mediana). Essa sada ento convertida para um valor real (nmero), processo que denominado defuzzificao. 3.2. Inferncia em sistemas nebulosos Ainferncianebulosaumprocessoquedefinequaisdecisesdevemsertomadas,gerando aes de controle, FIG. 3.4. NodiagramamostradonaFIG.3.4,oprocessodeinfernciaemsistemasnebulososfluida esquerdaparaadireita,deduasentradasparaumanicasada.Aestruturaemparalelodas regrasumdosmaisimportantesaspectosdalgicanebulosa.Oprocessodeinfernciaem sistemasnebulososdivididoemcincopartesprincipais:fuzzificaodasvariveisde entrada,aplicaodosoperadoresnebulosos(ANDouOR)noantecedente,implicaodo 18antecedentecomoconseqente,agregaodosconseqentescomasregraseporfima defuzzificao. FIGURA 3.4 Viso geral do processo de inferncia em sistemas nebulosos Fonte: Adaptada de FUZZY, 1995 3.2.1. Fuzzificando as entradas O primeiro passo determinar o grau de pertinncia de cada entrada a cada conjunto nebuloso pormeiodasfunesdepertinncia.Antesquecadaregrapossaseranalisada,necessrio que as entradas sejam fuzzificadas de acordo com cada varivel lingstica, FIG. 3.5. Comoumexemplo,mostra-senaFIG.3.5comoacomidadeumrestaurante(avaliadaem uma escala de 0 a 10) qualificada por meio da funo de pertinncia deliciosa. V-se que acomidaavaliadaem8correspondeaumgraudepertinnciade0,7,dadopelafunode pertinncia deliciosa. 3.2.2. Aplicando os operadores nebulosos Na seo anterior, as entradas foram fuzzificadas e o grau em que cada parte do antecedente satisfazcadaregrafoideterminado.Entretanto,seoantecedentedeumaregraforcomposto pormaisdeumaparte,umoperadornebulosodeveseraplicadocomointuitodeobterum nmeroquerepresentaoresultadodoantecedenteparaaquelaregra.Asentradasdeum 19operador nebuloso so dois ou mais graus de pertinncias das variveis de entrada que foram fuzzificadas. A sada um valor, FIG. 3.6. FIGURA 3.5 O processo de fuzzificao Fonte: Adaptada de FUZZY, 1995 FIGURA 3.6 O uso do operador nebuloso OR Fonte: Adaptada de FUZZY, 1995 NoexemplomostradonaFIG.3.6,asduaspartesdoantecedente(servioexcelentee comidadeliciosa)tiveramgrausdepertinncia0,0e0,7respectivamente.Ooperador nebulosoORsimplesmenteselecionaomximodosdoisvalores,0,7,eassimaanliseda regra fica completa. 203.2.3. Aplicando o mtodo de implicao Antes de aplicar o mtodo de implicao, deve-se prestar ateno ao peso de cada regra. Toda regra possui um peso (nmero entre 0 e 1), que aplicado ao nmero dado pelo antecedente. Geralmente este peso tem valor 1 e dessa forma ele no tem efeito no processo de implicao. Agoraquecadaregratemseupeso,omtododeimplicaopodeserimplementado.A entrada para o processode implicao um nmero obtido pelo antecedente, e a sada um conjunto nebuloso, FIG. 3.7. O processo de implicao aplicado a cada regra. FIGURA 3.7 Aplicao do operador de implicao min Fonte: Adaptada de FUZZY, 1995 No exemplo mostrado na FIG. 3.7, foi aplicado o operador de implicao min (mnimo), que descarta um pedao da funo de pertinncia generosa. 3.2.4. Agregando as sadas A inferncia nebulosa o processo que determina que decises devam ser tomadas a respeito do processo. Essas decises so inferidas com base no teste de todas as regras de inferncia. Sendoassim,essasregrasdevemsercombinadasdealgumamaneiraantesquealguma deciso seja tomada. 21Aagregaooprocessopelosquaisosconjuntosnebulosos,querepresentamasadade cada regra, so combinados em um nico conjunto. A agregao ocorre apenas uma vez para cadavariveldesada.Aentradadoprocessodeagregaoumalistadefunesdesada truncadas,retornadaspelaimplicaodecadaregra.Asadaumconjuntonebuloso,FIG. 3.8. FIGURA 3.8 Aplicao do mtodo de agregao max Fonte: Adaptada de FUZZY, 1995 No exemplo mostrado na FIG. 3.8, trs regras foram colocadas com o intuito de mostrar como a sada de cada regra combinada, agregada, em um nico conjunto nebuloso cuja funo de pertinncia especifica um peso para cada valor de sada, nesse caso, a gorjeta. Na agregao, foiusadoooperadordeagregaomax,quecombinaosmximosdecadafunode pertinncia, gerando assim, uma nica funo, nesse caso, mxima. 223.2.5. Defuzzificando Aentradadoprocessodedefuzzificaoumconjuntonebuloso,oquefoiagregadono processo anterior, e a sada um nmero, FIG. 3.9. Esta sada pode representar uma ao de controle precisa sobre o sistema a ser controlado. FIGURA 3.9 O processo de defuzzificao Fonte: Adaptada de FUZZY, 1995 Como mtodo de defuzzificao, fez o uso do centride (COA), o mais popular dos mtodos de defuzzificao, o qual retorna o centro da rea abaixo da curva. Aseleodomtodoestrelacionadadiretamentecomascaractersticasdoprocesso controladoeocomportamentodecontrolenecessrio.Algunsmtodos,comoomtododa mdia dos mximos (MOM), se assemelham o efeito de um controlador bang-bang, podem conduziraaesdecontroleinadequadasaomododeoperao(porexemplo,produzindo solavancos)e,assim,causardanosdeordemprticaemequipamentoscomoosatuadores (SANDRI; CORREA, 1999). Existemaindaoutrosmtodosdedefuzzificao,apresentandodiferenasemtermosde velocidadeeeficincia,caractersticasquedevemseranalisadasemconjuntocomos requisitos do projeto. 23IV. MODELO DO CONTROLADOR FUZZY PI ParaaaplicaodocontroladorfuzzyPIemumsistemarealnecessriaadeterminaoda leidecontrole.Estaleirelacionarasentradasdocontroladorcomasuasada.Trata-sede umafrmulamatemtica,queserinseridaemummicrocontroladorparaqueestecalculea sada do controlador objetivando o controle da temperatura do ambiente. 4.1. Inferncia nebulosa de Sugeno Oprocessodeinferncianebulosadiscutidonocaptulo3conhecidocomoomtodode inferncia nebulosa de Mamdani, sendo esta a metodologia mais comum. Esta seo discute o mtododeinferncianebulosadeSugenoouTakagi-Sugeno-Kang,introduzidoem1985e quesimilaraomtododeMamdaniemvriosaspectos.Asduasprimeiraspartesdo processo de inferncia nebulosa, ou seja, fuzzificao das entradas e aplicao dos operadores nebulosos so avaliados da mesma maneira para ambos os mtodos de inferncia nebulosa. A principal diferena entre os mtodos de Mamdani e Sugeno que para este mtodo, o grau de pertinnciadasadadocontroladorserregidoporumafunolinearousimplesmenteser uma constante (FUZZY, 1995). Uma regra tpica em um modelo nebuloso de Sugeno tem a forma: Se entrada 1 = x e entrada 2 = y, ento sada z = ax + by + c(4.1) Para um modelo de Sugeno de ordem zero, o nvel da sada z uma constante (a = b = 0). O nvel da sada zi de cada regra determinado pela sua multiplicao com um peso wi da regra. Por exemplo, para uma regra que contenha um AND com entrada 1 = x e entrada 2 = y, o peso definido por ( ) ( ) ( ) y F x F AND wi 2 1, = (4.2) onde( ) .2 , 1F soasfunesdepertinnciadasentradas1e2.Asadafinaldosistemaa mdia ponderada da sada de cada uma das regras de inferncia, ou seja, 24Sada===NiiNii iwz wfinal11(4.3) ComosevarepresentaodosistemadeSugenomaiscompactaecomputacionalmente eficientecomparadaaosistemadeMamdani,razesestaspelasquaisocontroladorfuzzyPI projetado utilizar a inferncia nebulosa de Sugeno. Vejaa seguiras vantagens deambos os mtodos de inferncia nebulosa: Vantagens do mtodo de Sugeno: oComputacionalmente eficiente; oTrabalha bem com tcnicas lineares (ex.: controle PID); oTrabalha bem com tcnicas adaptativas e de otimizao; oGarante uma curva de sada contnua; oBem adequado anlise matemtica. Vantagens do mtodo de Mamdani: o intuitivo; oLargamente utilizado; oBem adequado ao raciocnio humano. 4.2. Princpio matemtico do controlador fuzzy PI Descreve-senestaseooprincpiomatemticoparaoprojetodocontroladorfuzzyPI, incluindo a fuzzificao, a base de regras do controlador e a defuzzificao. No projeto usa-se como base o controlador PI convencional. A sada de um controlador PI analgico convencional no domnio de Laplace dada por: ( ) ( ) s EsKK s uci cp PI|||
\|+ = (4.4) 25onde cpK e ciK soosganhosproporcionaleintegral,respectivamente,e( ) s E representao sinal de erro. Aequao(4.4)podesertransformadanasuaformadiscretaaplicandoatransformao bilinear dada por: ((
+ =11 2zzTs(4.5) ondeT o tempo de amostragem. Assim, a equao (4.4) resulta em: ( ) ( ) z Ezz T KK z uci cp PI|||
\|++ =112(4.6) Colocando a equao (4.6) em funo de potncia negativas dez , obtm-se: ( ) ( ) z Ezz T KK z uci cp PI|||
\|++ =11112(4.7) Multiplicando ambos os lados da equao (4.7) por( )11 zobtm-se: ( ) ( ) ( ) ( ) ( ) z E zT Kz K z z uci cp PI|||
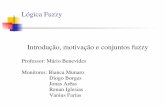
\|+ + = 1 1 1121 1 (4.8) Noplanoz (domniodetempodiscreto)avarivel nzmultiplicando( ) z Y significano tempoavarivel( ) kT y atrasadanT segundos,ondeT otempodeamostragem.Assim, calculando-seaTranformadaZInversadaequao(4.8),obtm-seaseguinteequaode diferenas: ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) T nT e nT eT KT nT e nT e K T nT u nT uci cp PI PI + + = 2(4.9) 26Dividindo a equao (4.9) porTe rearranjando-a obtm-se: ( ) ( ) ( ) T nT e K nT r K nT ui PI + = (4.10) onde ci iK K =e 2TK K Kcicp + = , com: ( )( ) ( )TT nT u nT unT uPI PIPI = (4.11) e ( )( ) ( )TT nT e nT enT r = (4.12) Admitindo um ganho de controle nebuloso uKchega-se lei de controle do controlador fuzzy PI, dada por: ( ) ( ) ( ) nT u K T nT u nT uPI u PI PI + =(4.13) OcontroladorfuzzyPIumcontroladordigital,comosevnaFIG.4.11,onde( ) nT sp o set-point (entrada de referncia) e( ) nT y a sada do processo a ser controlado. FIGURA 4.11 Sistema de controle fuzzy PI Aseguir,apresenta-seoprocedimentopadronoprojetodecontroladoresnebulosos,oqual consiste na fuzzificao, no estabelecimento da base de regras e na defuzzificao. 274.2.1. Fuzzificao Pelaequao(4.10)observa-sequeocontroladorPIdigitalempregaduasentradas: ( ) T nT e Ki (erroatrasadomultiplicadoporumaconstante)e( ) nT r K (taxadevariao dosinaldeerromultiplicadaporumaconstate).Dessemodo,ocontroladorfuzzyPI empregarasmesmasentradasdocontroladorPIemvirtudedeaquelecontroladorseruma derivao deste. As funes de pertinncia das entradas do controlador fuzzy PI so apresentadas na FIG. 4.12. FIGURA 4.12 Funes de pertinncia das entradas do controlador fuzzy PI Fonte: Adaptada de MALKI et al, 1997 Por meio da FIG. 4.12 possvel obter equaes para o clculo do grau de pertinncia de cada entrada. Para isto, basta observar que as funes de pertinncia so retas. Assim, de posse de doispontosdecadafunodepertinncia(reta)eaplicandoaequaodaretaobtm-seas seguintes equaes: ( )LL T nT e Kp ei2+ = ( )LL T nT e Kn ei2+ = ( )LL nT r Kp r2+ = ( )LL nT r Kn r2+ = (4.14) 4.2.2. Regras de controle fuzzy Utilizando as funes de pertinncia anteriormente mencionadas, estabelecem-se as regras de controle para o controlador fuzzy PI: 28 (R1) Se( ) n e T nT e = E (AND)n r nT r = ) (ento sada-PI =n o(R2) Se( ) n e T nT e = E (AND)p r nT r = ) (ento sada-PI =z o(R3) Se( ) p e T nT e = E (AND)n r nT r = ) (ento sada-PI =z o(R4) Se( ) p e T nT e = E (AND)p r nT r = ) (ento sada-PI =p o (4.15) Nasregrasdecontroleestabelecidas,sada-PIasadadocontroladorfuzzyPI( ) nT u , p e significa erro positivo ep o significa sada positiva, etc. Alm do mais, E (AND) representa o operador lgico AND de Zadeh definido por( ) { }B Amin B A , = . As quatro regras definidas na equao (4.14), juntas, geram as aes de controle para a lei de controle do controlador fuzzy PI. A formulao das regras de controle pode ser entendida como se segue. Para a regra 1 (R1), a condion e (erro negativo) implica que a sada do processo( ) nT yest acima da referncia ( ) nT sp ,en r (taxadoerronegativa)implicaque( ) ( ) nT y T nT y < ,ouseja,asadado processoestaumentando,distanciandoaindamaisdareferncia.Assim,( ) nT u deveser negativo para que se diminua a sada do processo. Similarmente, para a regra 2 (R2), uma vez que a sada do processo est acima da referncia mas diminuindo, nenhuma ao de controle necessrianestecaso,poisoprocessoporsisestcaminhandoparaareferncia;assim ( ) nT u deve ser zero. As regras 3 e 4 so determinadas de maneira similar. 4.2.3. Defuzzificao Neste processo utiliza-se como mtodo de defuzzificao o centro de massa para defuzzificar aaodecontroleincremental( ) nT u daleidecontroledocontroladorfuzzyPI,equao (4.13), como mostrado na equao (4.16): ( ) = )`)`entrada da a pertinnci de grauente correspond sada entrada da a pertinnci de graunT u (4.16) 29Paraaavaliaodaequao(4.16),ointervalodevaloresdasduasentradas(erroetaxade variao do erro) decomposto em vinte regies (ICs), FIG. 4.13. As regras de controle (R1) (R4)juntamentecomasfunesdepertinnciaeasregiesIC,sousadasparacalculara lei de controle apropriada para cada regio. FIGURA 4.13 Regies das combinaes possveis entre as entradas Fonte: Adaptada de TANG; CHEN; LU, 2001 Considerealocalizaode( ) T nT e Ki e( ) nT r K naregioIC1.Nestaregio, ( ) T nT e Ki est compreendido no intervalo[ ] L , 0e( ) nT r K no intervalo[ ] 0 , L . Assim, analisando a FIG. 4.12 tem-se que5 , 0 > p e ,5 , 0 < n e ,5 , 0 < p re5 , 0 > n rpara pontos situadosnaregioIC1.Nestamesmaregioobserva-seque( ) ( ) nT r K T nT e Ki > e conseqentemente, por uma anlise na FIG. 4.12 v-se quen r p e > en e p r > . Assim, ordenandoosgrausdepertinnciadasentradasnaordemdecrescente,observa-sequepara pontos situados na regio IC1 tem-se que: p e n r p r n e < < < (4.17) Depossedaequao(4.17)v-sequenaregra1aaplicaodooperadorlgicoANDde Zadeh acarreta: { } n e n r n e min n r taxa AND n e erro = =)` = = ,(4.18) 30Portanto, a regra 1 (R1) produz: )`n o ente correspond sada da a pertinnci de grau on e a selecionad entrada da a pertinnci de grau o(R1), (4.19) Similarmente,naregioIC1,asregras(R2)(R4),juntamentecomooperadorlgicoAND de Zadeh, produzem: )`z o ente correspond sada da a pertinnci de grau on e a selecionad entrada da a pertinnci de grau o(R2), (4.20) )`z o ente correspond sada da a pertinnci de grau on r a selecionad entrada da a pertinnci de grau o(R3), (4.21) )`p o ente correspond sada da a pertinnci de grau op r a selecionad entrada da a pertinnci de grau o(R4), (4.22) Pode ser verificado que as equaes (4.19) a (4.22) so vlidas tanto para a regio IC1 como para a IC2. Assim, nestas regies, segue-se que a equao (4.16) origina, ( )p r n r n e n ep o p r z o n r z o n e n o n enT u + + + = (4.23) Comojfoidito,ocontroladorfuzzyPIprojetadoutilizarainferncianebulosadeSugeno paragerarasaesdecontrole.Assim,assumirqueosgrausdepertinnciadasadado controlador sero constantes, dadas por: L p o = L n o = 0 = z o(4.24) Utilizando as equaes (4.14) e (4.24) calcula-se a equao (4.23). Assim, obtm-se: 31( )( ) ( )( ) ( ) [ ] nT r K T nT e KT nT e K LLnT uii + = 2 2 (4.25) Utilizando o mesmo procedimento descrito anteriormente verifica-se que para as regies IC5 e IC6: ( )( ) ( )( ) ( ) [ ] nT r K T nT e KT nT e K LLnT uii + += 2 2 (4.26) Nota-seque( ) 0 T nT e nasregiesIC5eIC6.Combinandoasequaes(4.25)e(4.26), obtm-se uma nica equao (4.27), vlida para as quatro regies IC1, IC2, IC5 e IC6: ( )( ) ( ) [ ]( ) ( ) T nT e K LnT r K T nT e K LnT uii + = 2 2 (4.27) TrabalhandodamesmamaneiraparaasoutrasregiesdaFIG.4.13,obtm-seasseguintes frmulas para as vinte regies: ( )( ) ( ) [ ]( ) ( ) T nT e K LnT r K T nT e K LnT uii + = 2 2 em IC1, IC2, IC5 e IC6(4.28) ( )( ) ( ) [ ]( ) ( ) nT r K LnT r K T nT e K LnT ui + = 2 2 em IC3, IC4, IC7 e IC8(4.29) ( ) ( ) [ ] L nT r K nT u + = 21em IC9 e IC10(4.30) ( ) ( ) [ ] L T nT e K nT ui+ = 21em IC11 e IC12(4.31) ( ) ( ) [ ] L nT r K nT u = 21em IC13 e IC14(4.32) ( ) ( ) [ ] L T nT e K nT ui = 21em IC15 e IC16(4.33) ( ) 0 = nT u em IC18 e IC20(4.34) ( ) L nT u = em IC17(4.35) ( ) L nT u = em IC19(4.36) 32As equaes (4.28) a (4.36) avaliam a sada do controlador fuzzy PI. Estas equaes iro ditar qualdeverseroincrementonaaodecontroleanteriordetalformaquesecontrolea temperatura interna do ambiente. 4.3. Validao do modelo Obtida a lei de controle para o controlador fuzzy PI, verifica-se se as equaes (4.28) a (4.36) sorealmentevlidasparaocontroladoremquesto.Admitindovalores paraasentradasdo controlador,asuavalidaofoirealizadapelacomparaodasadaobtidapelocontrolador fuzzyPIcalculadapormeiodasequaes(4.28)a(4.36)ecomasadaobtidapormeioda caixa de ferramentas Fuzzy Logic Toolbox, disponvel no programa MATLAB. Primeiramente,deve-seentrarnoFuzzyLogicToolboxcomosdadosreferentesao controladorfuzzyPI,FIG.4.14.Nestafigura,observa-seoerroetaxacomoasvariveisde entradaecomosada,umafunof(u),emvirtudedautilizaodomtododeSugenode inferncianebulosa.Namesmafigura,observam-seomtodominparaooperadorlgico AND e o mtodo wtaver, ou seja, o centro de massa como mtodo de defuzzificao. Adotou-se o intervalo [-1,1] para todas as trs variveis, ou seja, L = 1. Com relao s constantesKe iK , estas foram igualadas a um. FIGURA 4.14 Definio das variveis de entrada e sada, dos operadores lgicos e do mtodo de defuzzificao no Fuzzy Logic Toolbox 33Deve-setambmentrarcomasfunesdepertinnciaparacadavariveldocontrolador nebuloso, FIG. 4.15, 4.16 e 4.17. FIGURA 4.15 Funes de pertinncia para a entrada erro no Fuzzy Logic Toolbox FIGURA 4.16 Funes de pertinncia para a entrada taxa no Fuzzy Logic Toolbox 34 FIGURA 4.17 Funes de pertinncia para a sada no Fuzzy Logic Toolbox Por fim, entra-se com as regras de controle (R1) (R4) no Fuzzy Logic Toolbox, FIG. 4.18. FIGURA 4.18 Regras de controle (R1) (R4) no Fuzzy Logic Toolbox 35Com todos os dados inseridos no Fuzzy Logic Toolbox, deve-se comparar a sada obtida pelo toolbox, FIG. 4.19, com a obtida pelas equaes (4.28) a (4.36) para um mesmo conjunto de variveis de entrada. Considera-se inicialmente o erro e a taxa sendo nulos e calcula-se a sada do controlador com o auxlio das equaes em questo. Observa-se que para estes valores das variveis de entrada, deve-se utilizar a equao (4.28) no clculo da sada( ) nT u . Assim: ( )( ) ( ) [ ]( ) ( )02 2= + = T nT e K LnT r K T nT e K LnT uii (4.37) Observa-senaFIG.4.19queasadadocontroladortambmnula,oquecondizcomo resultadoobtidonaequao(4.37).Ainterpretaofsicadesteresultadotambm condizentecomarealidade,poisseoerronuloeataxatambm,issoquerdizerqueo sistemaestestvelemsuareferncia(setpoint);sendoassimnohanecessidadedeum incremento na sada de controle. FIGURA 4.19 Sada obtida quando o erro e a taxa so nulos 36Considereagoracomovariveisdeentradaumerro=0,25eumataxa=0,5.Pelasregies mostradas na FIG. 4.13, observa-se que o ponto de operao do sistema se encontra na regio IC3,devendo-seutilizaraequao(4.29)paraoclculodasadadocontroladorfuzzyPI. Assim, avaliando a equao (4.29): ( )( ) ( ) [ ]( ) ( )[ ]( )25 , 05 , 0 2 25 , 0 25 , 0 12 2=+= + = nT r K LnT r K T nT e K LnT ui (4.38) Observa-senaFIG.4.20queovalordasadadocontroladortambm0,25,oquecondiz comoresultadoobtidonaequao(4.38).Outrasverificaespodemserobtidasdamesma maneira. Conclui-se que o projeto do controlador foi realizado de maneira correta, e assim as equaes(4.28)a(4.36)poderoserutilizadasnodesenvolvimentodosoftwaredecontrole para o controlador fuzzy PI. FIGURA 4.20 Sada obtida quando o erro = 0,25 e a taxa = 0,5 374.4. Sintonia do controlador fuzzy PI Com base nas equaes (4.13) e (4.28) a (4.36) observa-se que a sintonia do controlador fuzzy PIconsisteemestabelecerosvaloresdasconstantesK , iK e uK .Paraoajustedessas constantes adotou-se a mesma metodologia utilizada por Ying, Siler e Buckley (1990). Considera-se DK e iDK ganhosdinmicos,correspondentesaosganhosK e iK , respectivamente, da equao (4.10), quando o erro e a taxa de variao do erro no so nulos. De acordo com as equaes (4.10), (4.13), (4.28) e (4.29) v-se que: ( ) ( ) T nT e K LK K LKiuD =2 2 ( ) ( ) T nT e K LK K LKiu iiD =2 2 (4.39) nas regies IC1, IC2, IC5 e IC6 mostradas na FIG. 4.12, e ( ) ( ) nT r K LK K LKuD =2 2 ( ) ( ) nT r K LK K LKu iiD =2 2 (4.40) nas regies IC3, IC4, IC7 e IC8 mostradas na FIG. 4.12. Pelasequaes(4.39)e(4.40)conclui-sequeocontroladorfuzzyPIcorrespondeaum controladorPIno-linearcujosganhosK e iK sofunesno-linearesdasvariveisde entrada do controlador fuzzy PI. Para o controlador fuzzy PI, define-se dois novos ganhos: um ganho esttico (SK ) e um ganho estticointegral(iSK ),ganhosestesavaliadosconsiderando-senulosoerroeataxade variao do erro. De acordo com as equaes (4.39) e (4.40) v-se que: 384uSK KK=4u iiSK KK=(4.41) Com o intuito de fazer uma comparao justa entre os controladores fuzzy PI e PI, os ganhos SK e iSK docontroladorfuzzyPIsoigualadosaosganhos cK e ciK ,respectivamente,do controlador PI tradicional. Assim: 4u cK KK=4u i ciK KK=(4.42) Portanto,paraasintoniadocontroladorfuzzyPI,deve-sefazerprimeiramenteasintoniado controladorPI.DeterminadasasconstantesdocontroladorPI,ouseja, cK e ciK ,arbitra-se umvalorpara uK ecalculam-se,utilizandoaequao(4.42),asconstantesK e iK do controlador fuzzy PI. 39V. ESTUDO DE CASO 5.1. O objeto de estudo O objetivo deste trabalho estudar, implementar e analisar um sistema de controle fuzzy PI de temperaturanummodelodeedificaoemescalareduzida.Estemodelodeedificaoem escalareduzida,especificamente,umapequenacasaconstrudaemmadeira,FIG.5.1,5.2, 5.3. A maquete apresenta uma largura de 62,5 cm, um comprimento de 62 cm e uma altura de 37 cm. O modelo mostrado na FIG. 5.1 trata-se de uma maquete (escala 1:600) da casa do programa Usiteto das Usinas Siderrgicas de Minas Gerais S.A. USIMINAS (USITETO, 2001). O programaUsitetoiniciou-seem1997,comoresultadodeumaparceriaentreaUsiminasea CompanhiadeHabitaodeMinasGerais(Cohab-MG),quandofoidesenvolvidaasoluo dos prdios populares. Esta iniciativa tem como proposta contribuir para a reduo do dficit habitacional do Pas, e destinada populao com renda de at trs salrios mnimos. A casa Usiteto,FIG.5.4,5.5,umaalternativamaiseconmica,simpleserpida,emcomparao comosistemaconvencionaldeconstruodecasaspopulares.Esseprogramapossibilita aindaaofuturomoradorconstruirasuaprpriacasa(auto-construo)apsserinstrudo (FRANSOZO, 2003). FIGURA 5.1 Viso frontal e lateral da maquete 40 FIGURA 5.2 Viso traseira e lateral da maquete FIGURA 5.3 Viso superior da maquete 5.2. Proposta do sistema de controle Objetivandoocontroledetemperaturaemumambientedamaquete,desenvolve-seum sistemadecontrole.Estesistemadecontroleforneceumamassadearaoambientede maneira que sua temperatura estabilize num valor pr-estabelecido (setpoint). O sistema de controle proposto composto por um sensor LM35, cooler como atuador e um microcontrolador PIC16F877A. Estes dispositivos sero descritos brevemente ao longo deste captulo. Cmodo no qual ser posicionado o sensor de temperatura 41 FIG. 5.4 Casa do programa Usiteto Fonte: USITETO, 2001 FIG. 5.5 Planta baixa da casa Usiteto Fonte: USITETO, 2001 425.2.1. Microcontrolador PIC16F877A Ummicrocontroladorumcircuitointegradoprogramvelquecontmamaioriadas caractersticas de um computador, mas em tamanho limitado. Atualmente existem centenas de diferentes tipos de microcontroladores, abrangendo dispositivos de 8 a 40 pinos, ou at 64 ou maispinos.umtipodemicroprocessadorauto-suficienteedebaixocusto,sendomuitas vezesreferenciadoscomocomputadoresemtemporealembutidos.Tradicionalmenteos microcontroladoresforamprogramadosusandolinguagemassembly.Hojepossvel programarestesdispositivosusandolinguagensdealto-nvel,taiscomo,BASIC,PASCAL, ouC.Comoresultadodisto,algoritmosdecontrolemuitocomplexospodemser implementadosnosmicrocontroladoresecomoconseqnciadissoointeresseemcontrole digital tem aumentado rapidamente nas ltimas dcadas (IBRAHIM, 2006). Nestetrabalhoutiliza-seomicrocontroladorPIC16F877A,FIG.5.6.Trata-sedeum dispositivo de 40 pinos e apresenta um barramento interno de dados de 8 bits. Suas principais caractersticas so: Baixo custo; Facilidade de programao; Grande diversidade de perifricos internos; Memria de programa do tipo Flash; Excelente velocidade de execuo (5 MIPS); Baixo consumo de energia. FIGURA 5.6 Microcontrolador PIC16F877A 43Emgeral,osmicrocontroladoresapresentamumapequenaquantidadedememriainterna, fatorquelimitaasuautilizaoemgrandesprojetos.Noentanto,omicrocontrolador PIC16F877A apresenta uma quantidade de memria adequada sua utilizao no sistema de controle proposto. Napropostadecontrole,omicrocontroladorresponsvelporcalcularatensomdiaaser entregueaoatuador,ouseja,aocooler,demaneiraqueesteforneaumaquantidadedear necessriaparaamanutenodatemperaturainternadoambienteemumvalorpr-estabelecido. 5.2.2. Sensor LM35 O LM35 um sensor de temperatura de preciso, FIG. 5.7, cuja tenso de sada diretamente proporcionaltemperaturanaescalaCelsius,sendode10mV/C.Estesensornonecessita dequalquercalibraoexternaparafornecercomexatido,valoresdetemperaturacom variaes de 0,25 C ou at mesmo 0,75 C dentro da faixa de temperatura de -55 C a 150 C. Estesensortemsadacombaixaimpedncia,tensolinearecalibraoinerenteprecisa, fazendocomqueseuinterfaceamentocomdispositivosde leitura,como LCDsedisplaysde sete segmentos, seja fcil. FIGURA 5.7 Sensor LM35 OLM35podeseralimentadocomumatensode4a20Vdcedrenaapenas60Adesua fonte de alimentao, acarretando assim um baixo auto-aquecimento, menor que 0,1 C ao ar livre. 44O sensor LM35 pode ser encontrado em vrios tipos de encapsulamento, sendo o mais comum o TO-92, que mais se parece com um transistor, e oferece tima relao custo/benefcio, por ser o mais barato dos modelos e propiciar a mesma preciso dos demais. A grande diversidade de encapsulamentos se d devido alta gama de aplicaes deste circuito integrado. 5.2.3. Cooler Ocooleroatuadordosistemadecontrole,FIG.5.8.Estetemcomofunoforneceruma quantidade de ar ao ambiente, de tal modo que a temperatura interna do cmodo se mantenha constante em um valor pr-estabelecido. FIGURA 5.8 Cooler Apotnciadocoolercontroladapelomicrocontroladorpormeiodeumamodulaopor largura de pulsos, ou seja, PWM. Consequentemente a potncia do atuador determinada pelo ciclo de trabalho do cooler. Um cooler com um ciclo de trabalho de 100% estgirandoem sua velocidade mxima, apresentando uma tenso mdia de 12 V aplicada em seus terminais, ao passo que com um ciclo de trabalho de 0 % o cooler se encontra parado. 5.3. Montagem do sistema de controle Amontagemdosistemadecontrolerealizadaemumprotoboard,queumaplacacom milhares de furos e conexes condutoras para montagem de circuitos eltricos experimentais, e tambm dentro da casa, FIG. 5.9. No interior da casa se encontra um sensor de temperatura, umamplificadoroperacional,umcoolereduasresistncias.Noprotoboardseencontrao 45microcontrolador, trs resistores, dois capacitores, um transistor, um diodo, um oscilador em cristal, um potencimetro, dois botes e um LCD (display de cristal lquido). FIGURA 5.9 Sistema de controle montado NaFIG.5.10apresenta-seoesquemaeltricodosistemadecontrole.Observa-seneste esquemaeltricoqueasadadosensordetemperaturaamplificadaem11vezes.Esta amplificaotemcomointuitoaumentaraprecisodamediodetemperatura.Observa-se tambm um diodo em paralelo com o cooler. Este diodo chamado de diodo de roda livre e temcomofunoprotegerotransistor,umavezqueaosedesligarocoolerpoderocorrer uma descarga eltrica direcionada ao transistor em virtude do cooler ser uma carga indutiva. Comodiododerodalivreestadescargaeltricacircularemtornododiodoenomaisno transistor. Comosev,ocircuitoeltricoapresentaumLCD,oqualpossibilitaraleiturada temperatura interna do ambiente, do ciclo de trabalho do cooler e da temperatura de referncia (setpoint). O boto RESET utilizado para reinicializar o sistema de controle caso este sofra algumproblema.ObotoALTERASETPOINTutilizadoparaalteraratemperatura desejadanoambiente.Oosciladoremcristalinseridonocircuitotemcomofunoproduzir uma freqncia para o microcontrolador, sendo necessria para a execuo de suas instrues e assim, primordial para o correto funcionamento do sistema de controle. 46 FIGURA 5.10 Esquema eltrico do sistema de controle 5.4. Desenvolvimento do software de controle A partir do modelo do controlador, mais especificamente, de sua lei de controle, foi possvel desenvolverosoftwaredecontrole.Estesoftwarefazaleituradosensordetemperatura,de maneiraquesepossacompar-lacomatemperaturadesejadanoambiente.Emseguida,a partir da lei de controle do controlador fuzzy PI, calcula o incremento necessrio na sada do controladorparacontrolaratemperaturainternadoambiente.Porfim,atualizaasadado controlador e far a aquisio das respostas do sistema. Desenvolveu-seosoftwaredecontroleemlinguagemC.Sendoassim,necessita-sedeum compiladorparaconverteressalinguagemdealtonvelparaalinguagemdemquinado microcontrolador. Para isto, utiliza-se o ambiente de desenvolvimento PCWH IDE Compiler. Maioresinformaessobreestecompiladorpodemserencontradasnosite http://www.ccsinfo.com.Utilizou-seestecompiladordevidoasuavastaliteraturadisponvel noBrasil.Alinguagemdemquinaalinguagemnaqualosoftwaredevesergravadona memriadomicrocontrolador.Dessaforma,oprogramaconvertidoutilizaasinstrues disponveis no microcontrolador PIC16F877A. Apsacompilaodosoftwaredecontrole,estedeversergravadonomicrocontrolador. Paraistoutiliza-seoambientededesenvolvimentoMPLABIDE.Esteambientegratuitoe desenvolvidopelaprpriafabricantedomicrocontroladorPIC16F877A,ouseja,pela 47Microchip.Maioresinformaessobreesteambientededesenvolvimentopodemser encontradas no site http://www.microchip.com. Oalgoritmodosoftwaredecontrolepodeserconferidonofinaldestetexto,nosanexos.O algoritmo se encontra comentado de modo a facilitar seu entendimento. 5.5. Resultados obtidos A aquisio de dados realizada utilizando-se o mdulo NI USB-6009, FIG. 5.11, fabricado pelaNationalInstruments.Estemdulopossuioitoentradasanalgicas,duassadas analgicas, doze entradas/sadas digitais e um contador de 32 bits. Alm do mais o mdulo se comunicacomocomputadorpelobarramentoUSB,destacando-seassimasuaalta portabilidade. As entradas analgicas do mdulo so de 14 bits e utilizando apenas uma destas entradas,omduloNIUSB-6009capazdefazerat48000amostragensporsegundo, possuindoassimumdesempenhoacimadonecessrioparaobtenodosresultadosdo experimento.Paraqueosresultadosobtidossejamvisualizadosesalvosnocomputador utiliza-se o software gratuito VI Logger Lite. FIGURA 5.11 Mdulo NI USB-6009 Sabe-sequeasintoniadocontroladorfuzzyPIconsisteemestabelecerosvaloresdas constantesK , iKe uK . Nota-se, no entanto, pelas equaes (4.39) e (4.40), que a sintonia do controlador fuzzy PI consiste tambm em estabelecer valores para o tempo de amostragemTe para a faixa de[ ] L L, das variveis de entrada do controlador, que definida pelas funes depertinncia(FIG.4.12).Admitindo-sequeumsistematrmicoapresentaumaresposta 48lenta utiliza-se um tempo de amostragem de 1 s. Com relao ao parmetroLarbitra-se um valor fixo igual a 1. Desse modo tem-se1 = = L T . Aps a realizao de vrios experimentos, obtiveram-se as seguintes constantes: 10 = K 1 =iK 40 =uK(5.1) Na FIG. 5.12 apresenta-se o comportamento da temperatura interna do ambiente sob atuao do controlador PI. Observa-se que a temperatura se estabiliza em torno de 23,1 C, 1 min aps atemperaturaatingir23C,ouseja,atemperaturaderefernciapr-estabelecida.Como objetivodeavaliararobustezdosistemadecontrole,simula-seaocorrnciadeumarpida perturbao (ligao repentina de uma fonte interna de calor) no sistema com durao de 5 s. Essaperturbaoocasionaumaumentoinstantneodatemperaturadoambiente,chegando estaa24,5C.Comaatuaodosistemadecontrole,atemperaturadoambienteatingea temperaturaderefernciaemtornode2,5minapsatemperaturaatingirseupicomximo. Essetempoderepostaevidenciaarobustezdosistemadecontrole,poisestereagecomo intuito de manter a temperatura em torno da referncia. Na FIG. 5.13 apresenta-se o comportamento da temperatura interna do ambiente sob atuao do controlador fuzzy PI. Observa-se que a temperatura se estabiliza em torno de 23,1 C, 40 s apsatemperaturaatingir23C,ouseja,atemperaturadereferncia.Domesmomodo realizado no caso do controlador PI, simula-se uma rpida perturbao no sistema (em torno de 5 s) com o objetivo de avaliar a robustez do sistema de controle. Essa perturbao ocasiona um aumento instantneo da temperatura do ambiente, chegando esta a 24,4 C. A temperatura doambienteatingearefernciaemtornode2,5minapsatemperaturaatingirseupico mximo, evidenciando-se a robustez do sistema de controle. 490 1 2 3 4 5 62222.52323.52424.525Temperatura (C)Tempo (minutos) FIGURA 5.12 Temperatura interna do ambiente com a atuao do controlador PI 0 1 2 3 4 5 62222.52323.52424.525Tempo (minutos) Temperatura (C) FIGURA 5.13 Temperatura interna do ambiente com a atuao do controlador fuzzy PI Na FIG. 5.14 apresenta-se a tenso aplicada no cooler sob a atuao do controlador PI para se efetuarocontroledatemperaturadoambiente.Antesdaocorrnciadeumaperturbaono sistema,ocontroladorPIaumentagradativamenteatensonocoolercomoobjetivode 50manteratemperaturadoambienteprximadatemperaturaderefernciapr-estabelecida. Aplicada a perturbao, o controlador leva em torno de 6 s para aumentar instantaneamente a tenso nocooler,atingindo um pico de 9,2 V, ou seja, 76 % da potnciamxima do cooler. Cessada a perturbao a tenso no cooler volta a cair, estabilizando-se em torno de 6,2 V, ou seja, 52 % da potncia mxima do cooler, levando um tempo de 2,5 min aps a temperatura atingir seu pico mximo. Na FIG. 5.15 apresenta-se a tensoaplicada no cooler sob a atuao docontrolador fuzzy PI paraseefetuarocontroledatemperaturadoambiente.Antesdaocorrnciadeuma perturbaonosistema,ocontroladorfuzzyPIaumentagradativamenteatensonocooler tentandomanteratemperaturadoambienteprximadatemperaturaderefernciapr-estabelecida. Aplicada uma perturbao, ocontrolador leva em torno de 3 s paraaumentar a tenso no cooler, atingindo um pico de 10,2 V, ou seja, 85 % da potncia mxima do cooler. Quando cessada a perturbao, a tenso no cooler volta a cair, estabilizando-se em torno de 6,2 V, ou seja, 52 % da potncia mxima do cooler, correspondendo a um tempo de 2 min e 15 s aps a temperatura atingir seu pico mximo. 0 1 2 3 4 5 6234567891011Tenso (V)Tempo (minutos) FIGURA 5.14 Tenso aplicada no cooler com a atuao do controlador PI 510 1 2 3 4 5 6234567891011Tempo (minutos) Tenso (V) FIGURA 5.15 Tenso aplicada no cooler com a atuao do controlador fuzzy PI Deacordocomasrespostasdosistemaaosdoiscontroladoresobserva-sequeantesda ocorrncia da perturbao o sistema com a atuao do controlador fuzzy PI leva em torno de 20 s menos que o controlador PI para a estabilizao da temperatura do ambiente em torno da temperaturadereferncia.Quandoaplicadaumaperturbaooscontroladoresapresentaram umdesempenhosimilar,estabilizandoatemperaturainternadoambienteem aproximadamenteomesmotempo.Comrelaoaotempoderespostadoscontroladores,o controladorfuzzyPIlevaemtornode3segundosmenosqueocontroladorPIparareagir perturbao;noentantoestadiferenapodeserconsideradadesprezvel.Omesmosepode dizeremrelaopotnciafornecidaaocooler,asquaisforamsimilaressobaatuaode ambos os controladores. 52VI. CONCLUSES Neste trabalho, desenvolve-se um controlador fuzzy PI para o controle da temperatura interna de um ambiente em escala reduzida. Realiza-se um estudo de como implementar este sistema decontrole.Pormeiodesteestudoobtm-sealeidecontroledocontroladorfuzzyPI, viabilizandoassimasuaimplementaoprtica.Almdomaisdesenvolvidoum controladorPI,comparandoseudesempenhocomodocontroladornebulosoeservindo tambm como base para a sintonia deste controlador. Comodispositivodecontrole,utiliza-seomicrocontroladorPIC16F877A.Este microcontroladortemcomofunofazeraleituradosensordetemperaturaecalculara potncia a ser entregue ao atuador para que se controle a temperatura do ambiente. Ametodologiautilizadanestetrabalho,isto,oestudodoprincpiomatemticodo controladorfuzzyPIparaodesenvolvimentodeumaleidecontroleparaeste,uma ferramentaquepodeserutilizadaparaaaplicaodestesistemadecontroleemdiversas outrasaplicaes.Destaca-senaliteraturaasuaaplicaoemrobsmanipuladores;nestes sistemasocontroladorfuzzyPIapresentouumdesempenhobastantesuperioraum controlador PI. Comumsistemadeaquisiodedadosobtm-seasrespostasdosistemasobaatuaodos controladores. Neste estudo o controlador fuzzy PI apresentou um desempenho pouco superior ao controlador PI.
Para trabalhos futuros, sugere-se o desenvolvimento de outros controladores nebulosos, como ofuzzyPIDeointerfaceamentodomicrocontroladorcomdispositivosquepermitamnos resfriar o ambiente, mas tambm aquec-lo. Finalmente sugere-se a aplicao do controlador fuzzy PI em outros sistemas, principalmente nos quais os controladores PI no apresentam um desempenho satisfatrio, com o intuito de observar se houve melhoria considervel com o uso de sistemas de controle nebulosos. 53VII. REFERNCIAS BIBLIOGRFICAS AKUTSU,Maria.Mtodoparaaavaliaododesempenhotrmicodeedificaesno Brasil.1998.Tese(DoutoradoemArquitetura)ProgramadePsGraduaoem Arquitetura,FaculdadedeArquiteturaeUrbanismo,UniversidadedeSoPaulo,SoPaulo, 1998. CHENG, L. Y. Informaes subjetivas no estudo do conforto ambiental Uma introduo s abordagensbaseadasnateoriadossistemasnebulosos.In:ENCONTRONACIONAL SOBRE CONFORTO NO AMBIENTE CONSTRUDO, 6., 2001, Campinas. CHIU,Stephen.UsingFuzzyLogicinControlApplications:BeyondFuzzyPIDControl. IEEE Control Systems Magazine, Thousand Oaks, v. 18, n. 5, p. 100-104, 1998. COELHO,L.D.;ALMEIDA,O.M.;COELHO,A.A.R.ProjetoeEstudodeCasoda ImplementaodeumSistemadeControleNebuloso.Sba:Controle&Automao Sociedade Brasileira de Automtica, Natal, v. 14, n. 1, p. 20-29, 2003. FRANSOZO, H. L. Avaliao do desempenho de habitaes de baixo-custo estruturadas emao.2003.Teste(MestradoemEngenhariaCivil)ProgramadePsGraduaoem EngenhariaCivil,DepartamentodeEngenhariaCivil,UniversidadeFederaldeOuroPreto, Ouro Preto, 2003. FUZZYLogicToolboxUsersGuide,1995.THEMATHWORKS,Inc.Disponvelem: . Acesso em: 13 de fev. 2008. IBRAHIM,Dogan.Microcontrollerbasedapplieddigitalcontrol.WestSussex:John Wiley & Sons Ltd, 2006. MALKI, H. A.; MISIR, D.; FEIGENSPAN, D.; CHEN, G. Fuzzy PID Control of a Flexible-JointRobotArmwithUncertaintiesfromTime-VaryingLoads.IEEETransactionson Control Systems Technology, Santa Barbara, v. 5, n. 3, p. 371-378, 1997. 54PEREIRA, Fbio. Microcontroladores PIC Programao em C. So Paulo: Editora rica Ltda., 2003. PEREIRA,Fbio.MicrocontroladoresPICTcnicasAvanadas.SoPaulo:Editora rica Ltda., 2002. PINTO, M. A. V.; SOUZA, H. A.;FREITAS,M. S. R. Desempenho trmico dos painis de vedaoversusconfortotrmico.RevistaConstruoMetlica,SoPaulo,v.11,n.50,p. 34-38, set./out. 2001. SANDRI, S.; CORREA, C. Lgica Nebulosa. In: ESCOLA DE REDES NEURAIS, 5., 1999, So Jos dos Campos. Anais... So Jos dos Campos: ITA, 1999, p. c73-c90. SCHWARTZ, D. G.; KLIR, G. J; LEWIS, H. W, III; EZAWA, Y. Applications of Fuzzy Sets and Approximate Reasoning. Proceedings of the IEEE, Tallahassee, v. 82, n. 4, p. 482-498, 1994. SIMES,M.G;SHAW,I.S.Controleemodelagemfuzzy.1ed.SoPaulo:Editora Edgard Blcher Ltda., 2007. SOUZA,H.A.;FRANSOZO,H.L.;BRAGA,G.A.;FERNADES,W.L.Avaliaodo desempenhotrmicodossistemasdefechamentopr-fabricadosutilizadosnaconstruo estruturadaemao.In:ENCONTRONACIONALSOBRECONFORTONOAMBIENTE CONSTRUDO, 7., 2003, Curitiba. Anais... Curitiba: ENCAC-COTEDI, 2003. p. 1236-1244. TANG, W.; CHEN, G.; LU, R. A modified fuzzy PIcontroller for a flexible-joint robot arm with uncertainties. Fuzzy Sets and Systems, Houston, v. 118 , n. 1, p. 109-119, 2001. TRIBESS,A.;HERNANDEZNETO,A.;VITTORINO,F.;PEANHA,M.Aspectosde conservao de energia em ambientes condicionados. In: ENCONTRO NACIONAL SOBRE CONFORTONOAMBIENTECONSTRUDO,4.,1997,Salvador.Anais...Salvador: ENCAC-COTEDI, 1997. p. 413-417. 55USITETO Soluo Usiminas para habitao popular: detalhamento tcnico. Belo Horizonte: USIMINAS.GernciadeDesenvolvimentodaAplicaodoAoDGA.2001.Disponvel em: . Acesso em: 13 de fev. 2008. YING,H.;SILER,W.;BUCKLEY,J.FuzzyControlTheory:ANonlinearCase. Automatica, Tarrytown, v. 26, n. 3, p. 513-520, 1990. 56ANEXO I CDIGO FONTE DO SOFTWARE DE CONTROLE Apresenta-seocdigofonte,emlinguagemC,docontroladorfuzzyPI,implementadonum microcontrolador. //============================================================================= // Programa: implementao de um Controlador Fuzzy PI // Autor: Ives Soares de Oliveira //============================================================================= // *** Diretivas do Compilador *** #include #device adc = 10 // Utilizar converso A/D de 10 bits // *** Configurao dos fuses *** #fuses NOWDT, XT, NOPUT, NOPROTECT, NODEBUG, NOBROWNOUT, NOLVP, NOCPD, NOWRT #use delay(clock = 4000000) // Define clock de 4MHz #priority timer0, ext // Define a prioridade das interrupes // *** Incluso do drive LCD *** #include // *** Mtodo rpido de fazer I/O ***#use fast_io(a) #use fast_io(b) #use fast_io(c) #use fast_io(d) #use fast_io(e) // *** Variveis globais *** int temp_ref = 26; // Temperatura de referncia // *** Interrupo que garante um tempo de amostragem de 1 segundo *** #int_timer0 void trata_tmr0() { static int cont_timer0; // Varivel de contagem para o timer 0 set_timer0(131); // Inicializa o timer no valor 131 cont_timer0++; // Incrementa a varivel de contagem em uma unidade
if (cont_timer0 == 125) { // Ocorreram 125 interrupes (1s)? float temp; // Temperatura float erro; // Erro da temperatura static float erro_anterior; // Erro anterior da temperatura 57static float out_fuzzy_anterior; // Sada anterior do controlador Fuzzy PI boolean control_on = 1; // Varivel que diz o estado do sistema de controle cont_timer0 = 0; // Zera a varivel de contagem set_ADC_channel(0); // Seleciona o canal AN0 para converso delay_us(20); // Espera 20 microsegundos temp = read_adc(); // L o valor no conversor A/D temp = temp * 5000 / 1023 / 110 - 1; // Temperatura do sensor printf(lcd_putc, "\fTemp. = %2.1f ", temp); // Mostra a temperatura no LCD lcd_send_byte(1, 0b11011111); // Coloca o smbolo de "grau" no LCD printf(lcd_putc, "C\n"); // Mostra o C no LCD
erro = temp_ref - temp; // Calcula o erro if (erro >= 0.5) { control_on = 0; // Desliga o sistema de controle set_pwm1_duty(0); // Desliga o cooler } if (control_on) { // *** Ganhos do controlador Fuzzy PI *** const int Ki = 1; const int K = 10; const int Ku = 40; // Ganho de controle incremental float out_fuzzy; // Sada do controlador Fuzzy PI signed int16 ciclo; // Ciclo de trabalho do PWM1 float taxa; // Taxa em que o erro varia float abs_taxa; // Mdulo da taxa float abs_erro_ant; // Mdulo do erro anterior float out_inc_fuzzy; // Incremento na sada do controlador Fuzzy PI
taxa = erro - erro_anterior; // Calcula a derivada do erro erro_anterior = erro;
abs_erro_ant = abs(erro_anterior); // Calcula o mdulo do erro abs_taxa = abs(taxa); // Calcula o mdulo da derivada do erro
// *** Calcula a sada da base de regras do controlador nebuloso *** // *** Regies IC1, IC2, IC5 e IC6 *** if ((K * abs_taxa 1)) out_inc_fuzzy = 1;
// *** Regies IC19 *** else if ((Ki * erro < -1) && (K * taxa < -1)) out_inc_fuzzy = -1;
// *** Regies IC18 e IC20 *** else out_inc_fuzzy = 0;
// *** Calcula a sada do controlador fuzzy PI *** out_fuzzy = out_fuzzy_anterior + Ku * out_inc_fuzzy;
ciclo = out_fuzzy; // Seta o ciclo de trabalho do cooler ciclo = abs(ciclo); // Calcula o mdulo do ciclo de trabalho if (ciclo > 1020) ciclo = 1020; // Saturao no mximo if (ciclo < 255) ciclo = 255; // Saturao no mnimo out_fuzzy = ciclo; set_pwm1_duty(ciclo); // Seta o ciclo de trabalho para o PWM1
out_fuzzy_anterior = -out_fuzzy;
59 // *** Calcula a porcentagem do ciclo de trabalho *** out_fuzzy = out_fuzzy / 1020 * 100;
out_fuzzy = abs(out_fuzzy);
// *** Mostra o ciclo de trabalho do PWM1 *** printf(lcd_putc, "Ciclo = %3.1f ", out_fuzzy); lcd_send_byte(1, 0b00100101); // Envia o smbolo de porcentagem ao LCD } } } // *** Interrupo para o funcionamento do boto que altera o setpoint *** #int_ext void trata_rb() { temp_ref++; // Incrementa o setpoint em uma unidade if (temp_ref == 31) temp_ref = 26; // Volta a 30 o setpoint printf(lcd_putc, "\fSetpoint = %u ", temp_ref); // Mostra o setpoint no LCD lcd_send_byte(1, 0b11011111); // Coloca o smbolo de "grau" no LCD printf(lcd_putc, "C\n"); // Coloca a letra C no LCD delay_ms(250); // Delay para exibio da mensagem } // *** Mtodo principal do programa *** void main() { // *** Define as direo das portas *** set_tris_a(0b11111111); set_tris_b(0b11111111); set_tris_c(0b11111011); set_tris_d(0b00001000); set_tris_e(0b00000111);
lcd_init(); // Inicializa o display
// *** Configura o conversor A/D *** setup_ADC_ports(AN0); // AN0, VRef+ = VDD, VRef- = VSS setup_ADC(ADC_CLOCK_DIV_32); // Divide o clock interno por 64
// *** Configura as sadas PWM *** setup_timer_2(T2_DIV_BY_16, 254, 1); // Frequncia de 245Hz set_pwm1_duty(0); // Seta ciclo de trabalho em 0 para o PWM1 setup_ccp1(CCP_PWM); // Configura o CCP1 para modo PWM
// *** Configura o timer0 *** setup_timer_0(RTCC_INTERNAL | RTCC_DIV_64); // Clock interno e prescaler de 64 set_timer0(131); // Inicia o timer 0 em 131 60 // *** Configurao da interrupo no pino Rb.0 (interrupo externa) *** ext_int_edge(H_TO_L); // Interrupo no pino Rb.0 do nvel alto para o baixo clear_interrupt(INT_EXT); // Limpa a interrupo externa
// Habilita interrupes enable_interrupts(INT_TIMER0); // Interrupo do timer 0 enable_interrupts(INT_EXT); // Interrupo externa enable_interrupts(GLOBAL); // Interrupo global
// *** Loop infinito *** while (true) { } }