Estabilidade no Domínio da Freqüência -...
16
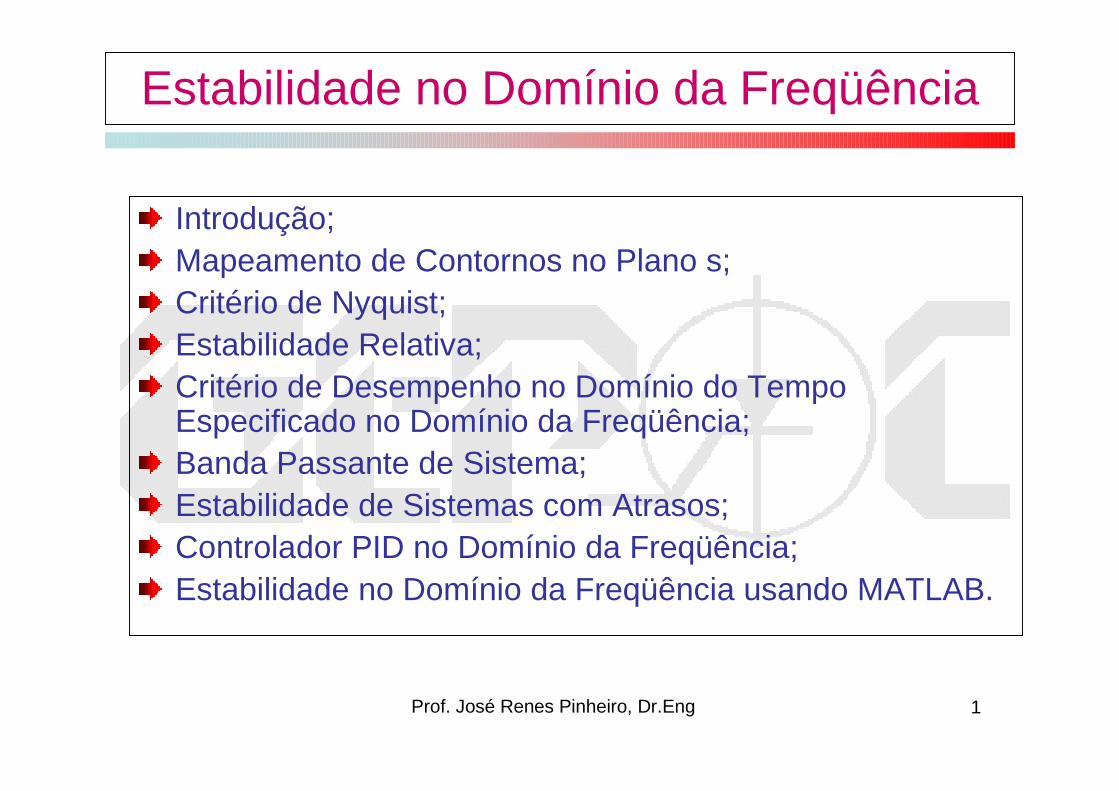
1 Prof. José Renes Pinheiro, Dr.Eng Estabilidade no Domínio da Freqüência Introdução; Mapeamento de Contornos no Plano s; Critério de Nyquist; Estabilidade Relativa; Critério de Desempenho no Domínio do Tempo Especificado no Domínio da Freqüência; Banda Passante de Sistema; Estabilidade de Sistemas com Atrasos; Controlador PID no Domínio da Freqüência; Estabilidade no Domínio da Freqüência usando MATLAB.
Transcript of Estabilidade no Domínio da Freqüência -...
1Prof. José Renes Pinheiro, Dr.Eng
Estabilidade no Domínio da Freqüência
Introdução;Mapeamento de Contornos no Plano s;Critério de Nyquist;Estabilidade Relativa;Critério de Desempenho no Domínio do Tempo Especificado no Domínio da Freqüência;Banda Passante de Sistema;Estabilidade de Sistemas com Atrasos;Controlador PID no Domínio da Freqüência;Estabilidade no Domínio da Freqüência usando MATLAB.
2Prof. José Renes Pinheiro, Dr.Eng
1 2
( )( 1)( 1)
KGH s
s sτ τ=
+ +
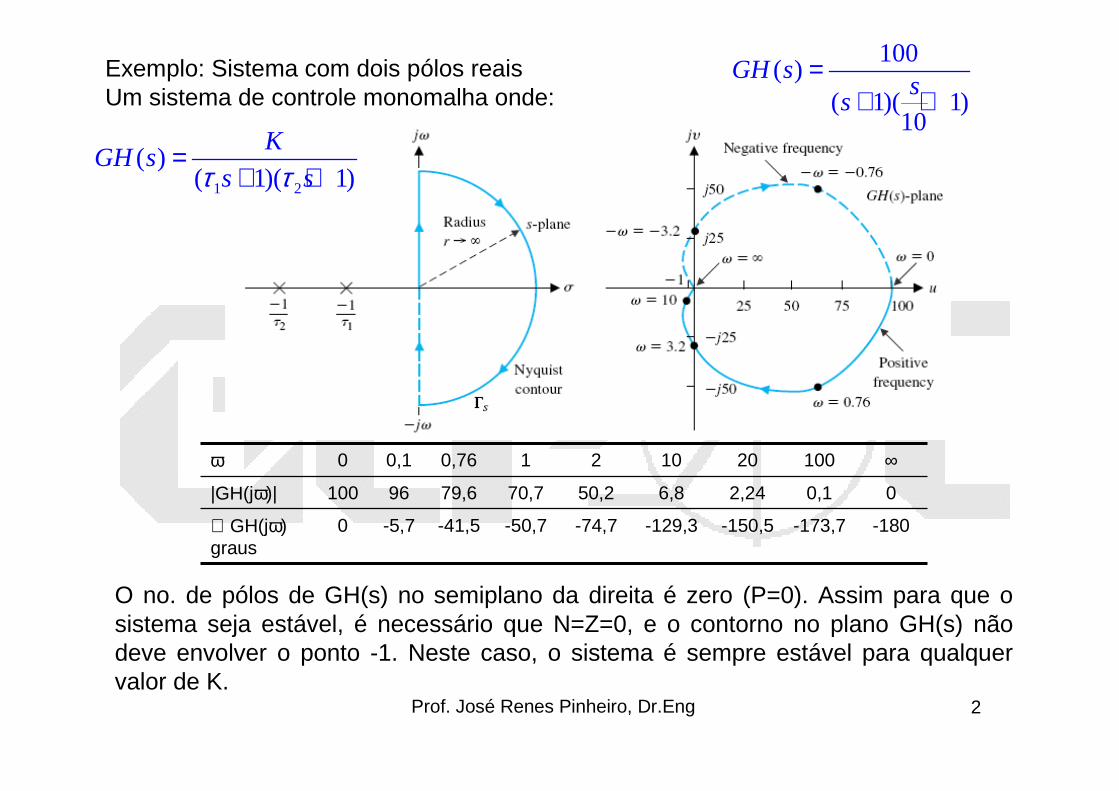
Exemplo: Sistema com dois pólos reaisUm sistema de controle monomalha onde:
100( )
( 1)( 1)10
GH ss
s=
+ +
-180-173,7-150,5-129,3-74,7-50,7-41,5-5,70∠ GH(jω) graus
00,12,246,850,270,779,696100|GH(jω)|
∞1002010210,760,10ω
O no. de pólos de GH(s) no semiplano da direita é zero (P=0). Assim para que o sistema seja estável, é necessário que N=Z=0, e o contorno no plano GH(s) não deve envolver o ponto -1. Neste caso, o sistema é sempre estável para qualquer valor de K.
3Prof. José Renes Pinheiro, Dr.Eng
( )( 1)
KGH s
s sτ=
+
0 0 0lim ( ) lim lim j
j
K KGH s e
eφ
φε ε εε ε−
→ → →
= =
( ) ( )s j
GH s GH jω ω=
=
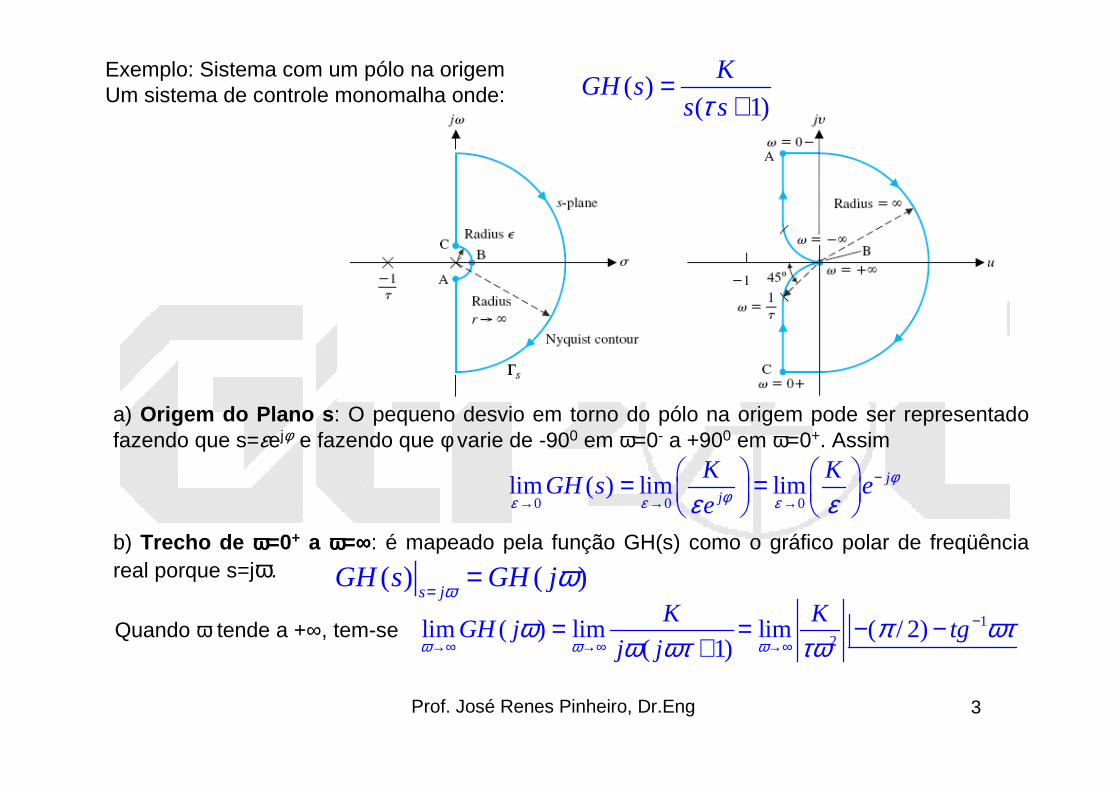
Exemplo: Sistema com um pólo na origemUm sistema de controle monomalha onde:
a) Origem do Plano s: O pequeno desvio em torno do pólo na origem pode ser representado fazendo que s=εejφ e fazendo que φ varie de -900 em ω=0- a +900 em ω=0+. Assim
b) Trecho de ωωωω=0+ a ωωωω=∞∞∞∞: é mapeado pela função GH(s) como o gráfico polar de freqüênciareal porque s=jω.
Quando ω tende a +∞, tem-se 12
lim ( ) lim lim ( / 2)( 1)
K KGH j tg
j jω ω ωω π ωτ
ω ωτ τω−
→∞ →∞ →∞= = − −
+
4Prof. José Renes Pinheiro, Dr.Eng
( )( 1)
KGH s
s sτ=
+
22
lim ( ) lim j
r r
KGH s e
rφ−
→∞ →∞=
( ) ( )s j
GH s GH jω ω=−
= −
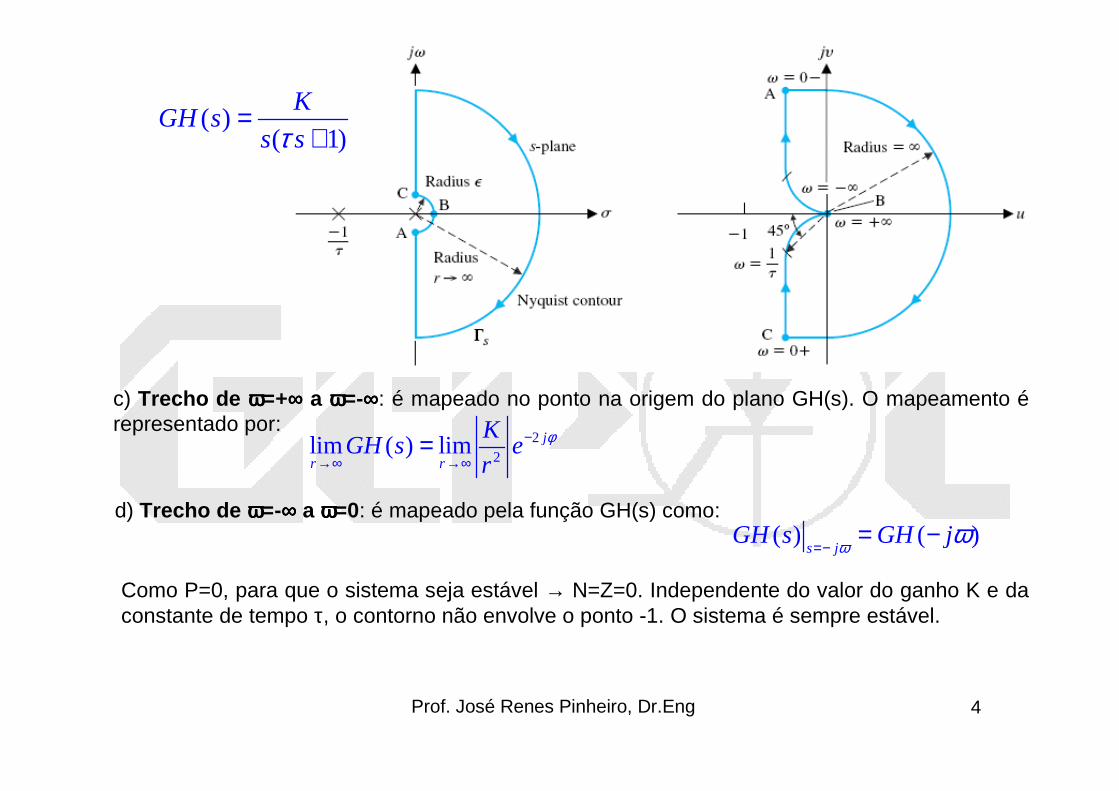
c) Trecho de ωωωω=+∞∞∞∞ a ωωωω=-∞∞∞∞: é mapeado no ponto na origem do plano GH(s). O mapeamento é representado por:
d) Trecho de ωωωω=-∞∞∞∞ a ωωωω=0: é mapeado pela função GH(s) como:
Como P=0, para que o sistema seja estável → N=Z=0. Independente do valor do ganho K e da constante de tempo τ, o contorno não envolve o ponto -1. O sistema é sempre estável.

5Prof. José Renes Pinheiro, Dr.Eng
1 2
( )( 1)( 1)
KGH s
s s sτ τ=
+ +
1 11 23
1 2
31 2
lim ( ) lim ( / 2)
lim (3 / 2)
KGH j tg tg
K
ω ω
ω
ω π ωτ ωτω τ τ
πω τ τ
− −
→∞ →∞
→∞
= − − −
= −
Exemplo: Sistema de três pólos.Um sistema monomalha
Para investigar a estabilidade é suficiente traçar o gráfico da parte do contorno ΓGH que representa o diagrama polar de freqüência real GH(jω) no intervalo 0+< ω<+∞, Assim
1 2 1 2
21 2
2 2 2 2 2 21 2
1 11 11/ 24 2 2 2 2
1 2 1 2
(1/ )(1 )( )
( 1)( 1) 1 ( )
( / 2)( ) (1 )
K jKKGH s
j j j
Ktg tg
ω ω τ τω τ ω τ ω ω τ τ ω τ τ
ωτ ωτ πω τ τ ω ω τ τ
− −
− − −= =+ + + + +
= − − − + + −
Quando ω tende a +∞
6Prof. José Renes Pinheiro, Dr.Eng
1 2 1 2
21 2
2 2 2 2 2 2
(1/ )(1 )0
1 ( )
Kv
ω ω τ τω τ τ ω τ τ
− −= =+ + +
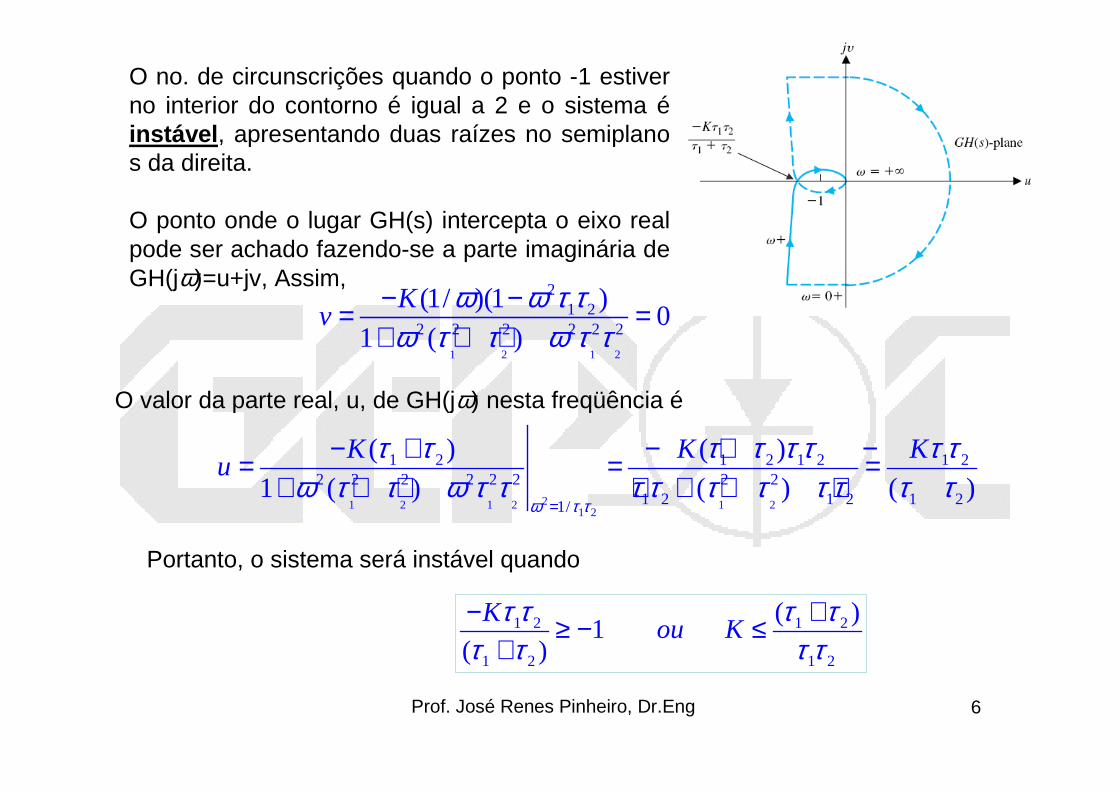
O no. de circunscrições quando o ponto -1 estiver no interior do contorno é igual a 2 e o sistema é instável , apresentando duas raízes no semiplanos da direita.
O ponto onde o lugar GH(s) intercepta o eixo real pode ser achado fazendo-se a parte imaginária de GH(jω)=u+jv, Assim,
O valor da parte real, u, de GH(jω) nesta freqüência é
21 2 1 2 1 21 2
1 2 1 2 1 2 1 22 2 2 2 2 2 2 2
1 2 1 2 1 21/
( ) ( )
1 ( ) ( ) ( )
K K Ku
ω τ τ
τ τ τ τ τ τ τ τω τ τ ω τ τ τ τ τ τ τ τ τ τ
=
− + − + −= = =+ + + + + + +
Portanto, o sistema será instável quando
1 2 1 2
1 2 1 2
( )1
( )
Kou K
τ τ τ ττ τ τ τ− +≥ − ≤
+

7Prof. José Renes Pinheiro, Dr.Eng
2( )
( 1)
KGH s
s s=
+
2K ≤
Considere-se o caso que τ1=τ2=1, de modo que
1 2
1 2
( )K
τ ττ τ
+≤Fazendo uso da inequação,
Há expectativa de estabilidade quando
Diagrama de Nyquist para 3 valores de K.
8Prof. José Renes Pinheiro, Dr.Eng
2( )
( 1)
KGH s
s sτ=
+
20 0lim ( ) lim
KGH j
ω ωω π
ω→ →
= −
3lim ( ) lim 3 / 2
KGH j
ω ωω π
ω→∞ →+∞
= −
220 0
lim ( ) lim jKGH j e φ
ε εω
ε−
→ →=
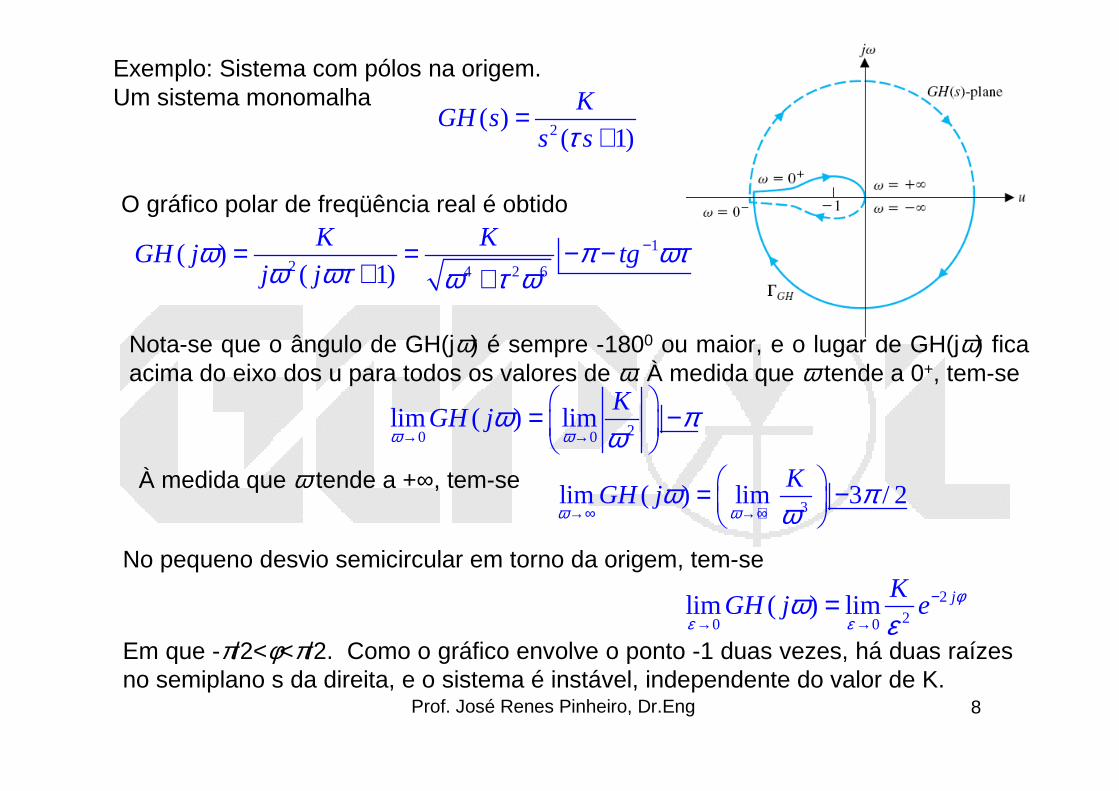
Exemplo: Sistema com pólos na origem.Um sistema monomalha
O gráfico polar de freqüência real é obtido
12 4 2 6
( )( 1)
K KGH j tg
j jω π ωτ
ω ωτ ω τ ω−= = − −
+ +
Nota-se que o ângulo de GH(jω) é sempre -1800 ou maior, e o lugar de GH(jω) fica acima do eixo dos u para todos os valores de ω. À medida que ω tende a 0+, tem-se
À medida que ω tende a +∞, tem-se
No pequeno desvio semicircular em torno da origem, tem-se
Em que -π/2<φ<π/2. Como o gráfico envolve o ponto -1 duas vezes, há duas raízes no semiplano s da direita, e o sistema é instável, independente do valor de K.
9Prof. José Renes Pinheiro, Dr.Eng
01 1
0 0 0lim ( ) lim lim 180
j
K KGH j
e φε ε εω φ
ε ε→ → →
= = − −
1
2 4
1
2 4
( ) ( / 2) ( )( 1)
( / 2)
K KGH j tg
j j
Ktg
ω π ωω ω ω ω
π ωω ω
−
−
= = − − −− +
= ++
22
lim ( ) limj
j
r rs re
KGH s e
rφ
φ−
→∞ →∞=
=
2Z N P= + =
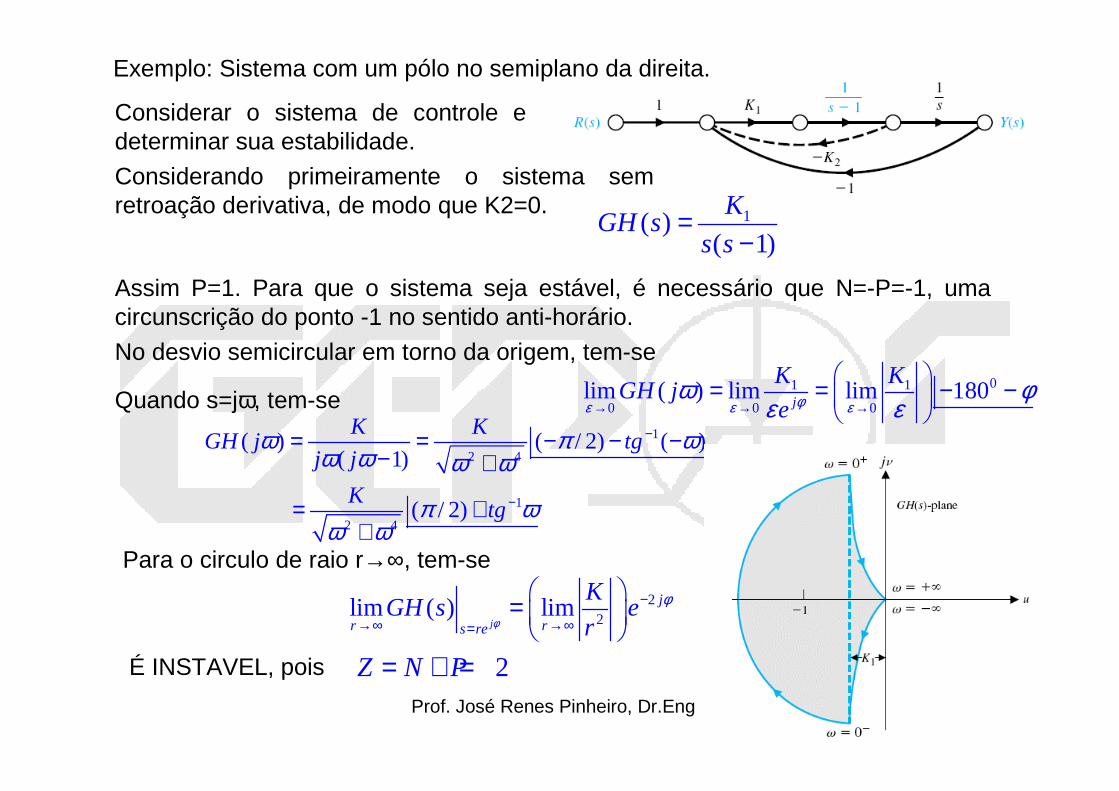
Exemplo: Sistema com um pólo no semiplano da direita.
Considerar o sistema de controle e determinar sua estabilidade.
Considerando primeiramente o sistema sem retroação derivativa, de modo que K2=0.
Assim P=1. Para que o sistema seja estável, é necessário que N=-P=-1, uma circunscrição do ponto -1 no sentido anti-horário.
1( )( 1)
KGH s
s s=
−
No desvio semicircular em torno da origem, tem-se
Quando s=jω, tem-se
Para o circulo de raio r→∞, tem-se
É INSTAVEL, pois
10Prof. José Renes Pinheiro, Dr.Eng
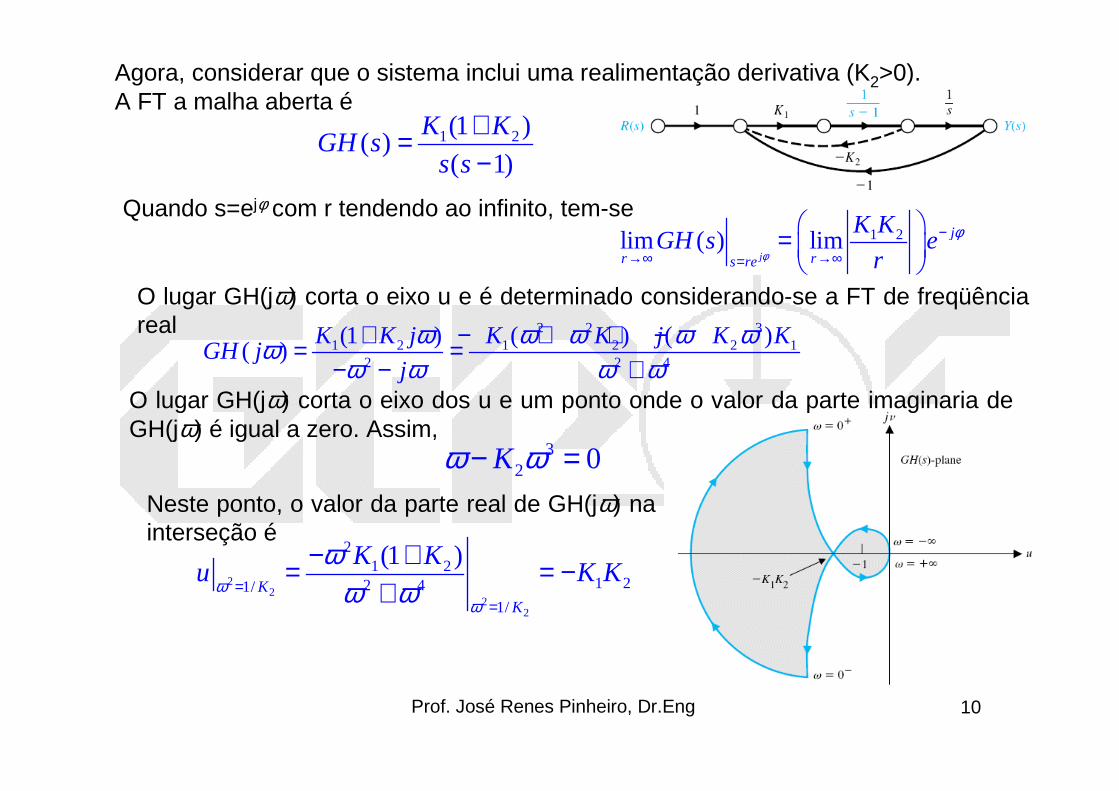
Agora, considerar que o sistema inclui uma realimentação derivativa (K2>0).A FT a malha aberta é
1 2(1 )( )
( 1)
K KGH s
s s
+=−
1 2lim ( ) limj
j
r rs re
K KGH s e
rφ
φ−
→∞ →∞=
=
2 2 31 2 1 2 2 1
2 2 4
(1 ) ( ) ( )( )
K K j K K j K KGH j
j
ω ω ω ω ωωω ω ω ω
+ − + + −= =− − +
32 0Kω ω− =
Quando s=ejφ com r tendendo ao infinito, tem-se
O lugar GH(jω) corta o eixo u e é determinado considerando-se a FT de freqüência real
O lugar GH(jω) corta o eixo dos u e um ponto onde o valor da parte imaginaria de GH(jω) é igual a zero. Assim,
Neste ponto, o valor da parte real de GH(jω) na interseção é
22
22
21 2
1 22 41/1/
(1 )K
K
K Ku K Kω
ω
ωω ω=
=
− += = −+
11Prof. José Renes Pinheiro, Dr.Eng
1 1 0Z N P= + = − + =
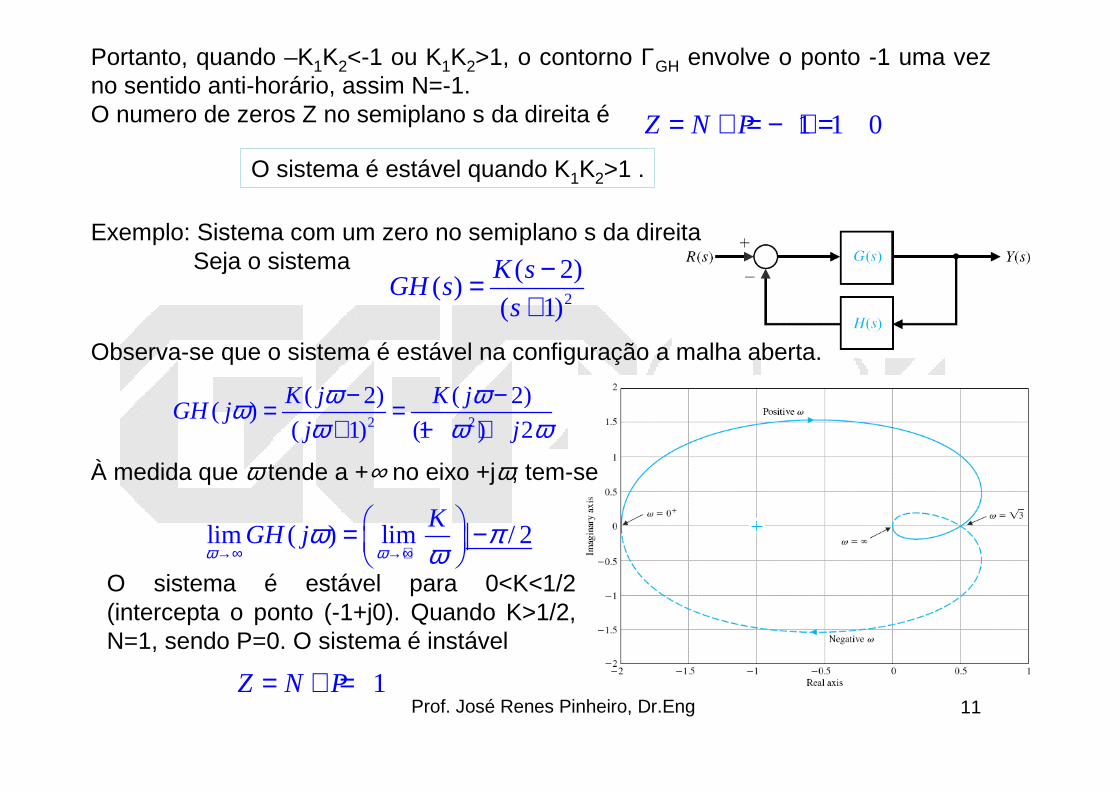
Exemplo: Sistema com um zero no semiplano s da direitaSeja o sistema
2
( 2)( )
( 1)
K sGH s
s
−=+
2 2
( 2) ( 2)( )
( 1) (1 ) 2
K j K jGH j
j j
ω ωωω ω ω
− −= =+ − +
lim ( ) lim / 2K
GH jω ω
ω πω→∞ →+∞
= −
1Z N P= + =
Portanto, quando –K1K2<-1 ou K1K2>1, o contorno ΓGH envolve o ponto -1 uma vez no sentido anti-horário, assim N=-1. O numero de zeros Z no semiplano s da direita é
O sistema é estável quando K1K2>1 .
Observa-se que o sistema é estável na configuração a malha aberta.
À medida que ω tende a +∞ no eixo +jω, tem-se
O sistema é estável para 0<K<1/2 (intercepta o ponto (-1+j0). Quando K>1/2, N=1, sendo P=0. O sistema é instável
12Prof. José Renes Pinheiro, Dr.Eng
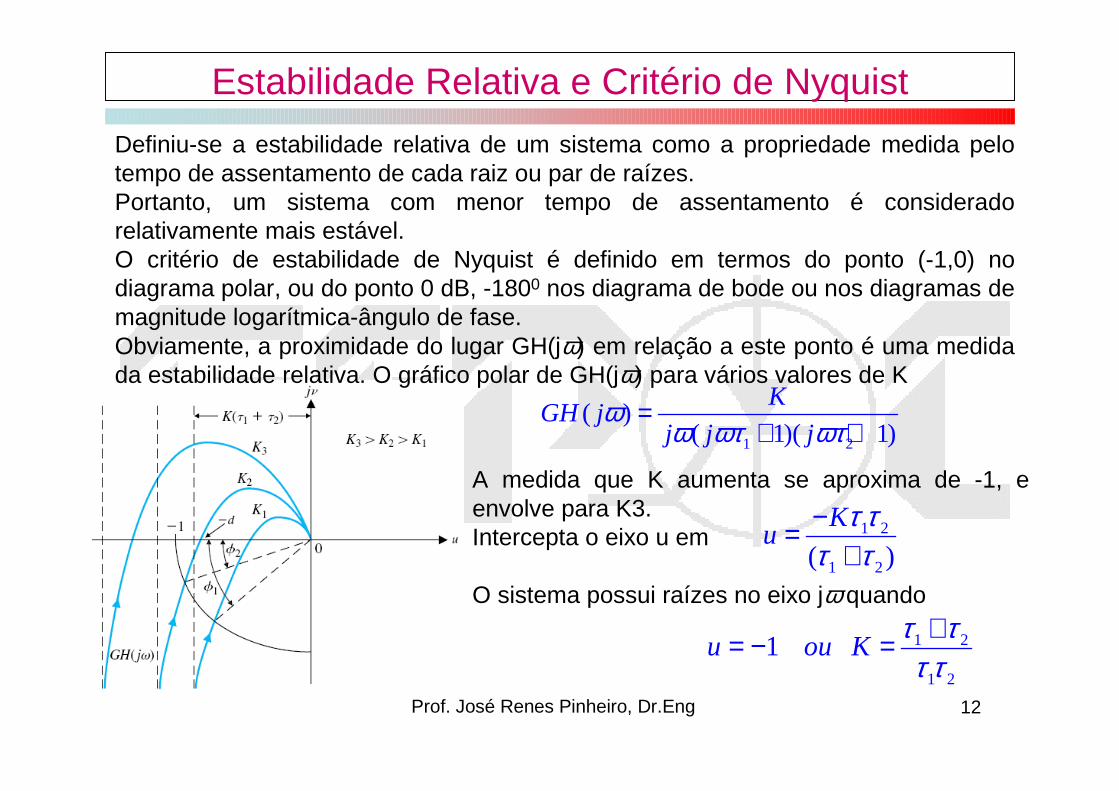
Estabilidade Relativa e Critério de Nyquist
1 2
( )( 1)( 1)
KGH j
j j jω
ω ωτ ωτ=
+ +
1 2
1 2( )
Ku
τ ττ τ−=
+
1 2
1 2
1u ou Kτ ττ τ+= − =
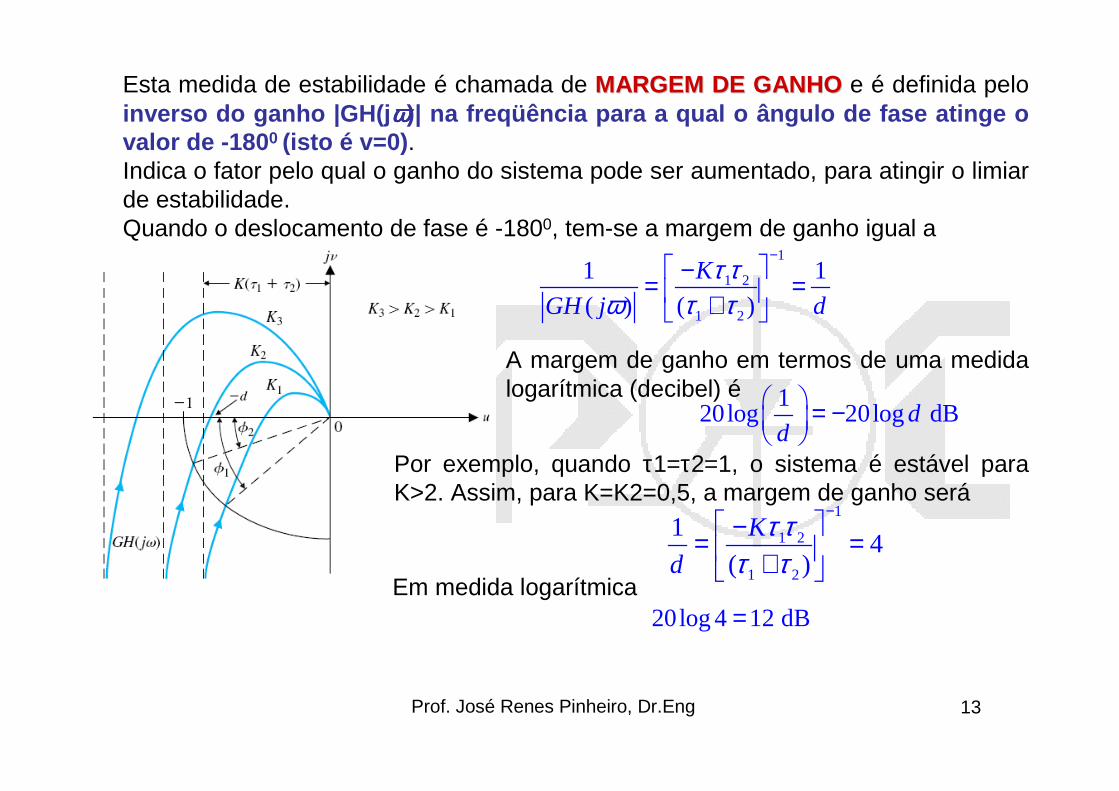
Definiu-se a estabilidade relativa de um sistema como a propriedade medida pelo tempo de assentamento de cada raiz ou par de raízes.Portanto, um sistema com menor tempo de assentamento é considerado relativamente mais estável.O critério de estabilidade de Nyquist é definido em termos do ponto (-1,0) no diagrama polar, ou do ponto 0 dB, -1800 nos diagrama de bode ou nos diagramas de magnitude logarítmica-ângulo de fase.Obviamente, a proximidade do lugar GH(jω) em relação a este ponto é uma medida da estabilidade relativa. O gráfico polar de GH(jω) para vários valores de K
A medida que K aumenta se aproxima de -1, e envolve para K3.Intercepta o eixo u em
O sistema possui raízes no eixo jω quando
13Prof. José Renes Pinheiro, Dr.Eng
1
1 2
1 2
1 1
( ) ( )
K
GH j d
τ τω τ τ
− −= = +
120log 20log dBd
d = −
Esta medida de estabilidade é chamada de MARGEM DE GANHOMARGEM DE GANHO e é definida pelo inverso do ganho | GH(jωωωω)| na freqüência para a qual o ângulo de fase atinge o valor de -180 0 (isto é v=0).Indica o fator pelo qual o ganho do sistema pode ser aumentado, para atingir o limiar de estabilidade.Quando o deslocamento de fase é -1800, tem-se a margem de ganho igual a
A margem de ganho em termos de uma medida logarítmica (decibel) é
Por exemplo, quando τ1=τ2=1, o sistema é estável para K>2. Assim, para K=K2=0,5, a margem de ganho será
1
1 2
1 2
14
( )
K
d
τ ττ τ
− −= = +
20log 4 12 dB=Em medida logarítmica

14Prof. José Renes Pinheiro, Dr.Eng
A margem de ganho é o acréscimo no ganho do sistema, quando a fase for igual a -180, e que resultará em um sistema marginal mente estável, com a
interseção no ponto -1+j0 pelo diagrama de Nyquist.
A margem de fase é quanto de defasagem de GH(jωωωω) com magnitude unitária que resultará em um sistema marginalmente e stável com
interseção do ponto -1+j0 pelo diagrama de Nyquist.
Uma medida alternativa da estabilidade relativa pode ser definida em termos do ângulo de margem de fase entre um sistema especifico e um marginalmente estável.Quando o lugar GH(jω) intercepta (-1,0) há diversas raízes da EC sobre o eixo jω.A MARGEM DE FASEMARGEM DE FASE é definida como o ângulo de fase segundo o qual o lugar GH(jω) deve ser girado de modo que a magnitude unitária |GH(jωωωω)|=1 passe pelo ponto (-1,0) no plano GH(jω).Esta medida de estabilidade relativa é igual ao atraso de fase adicional requerido para que o sistema se torne instável.
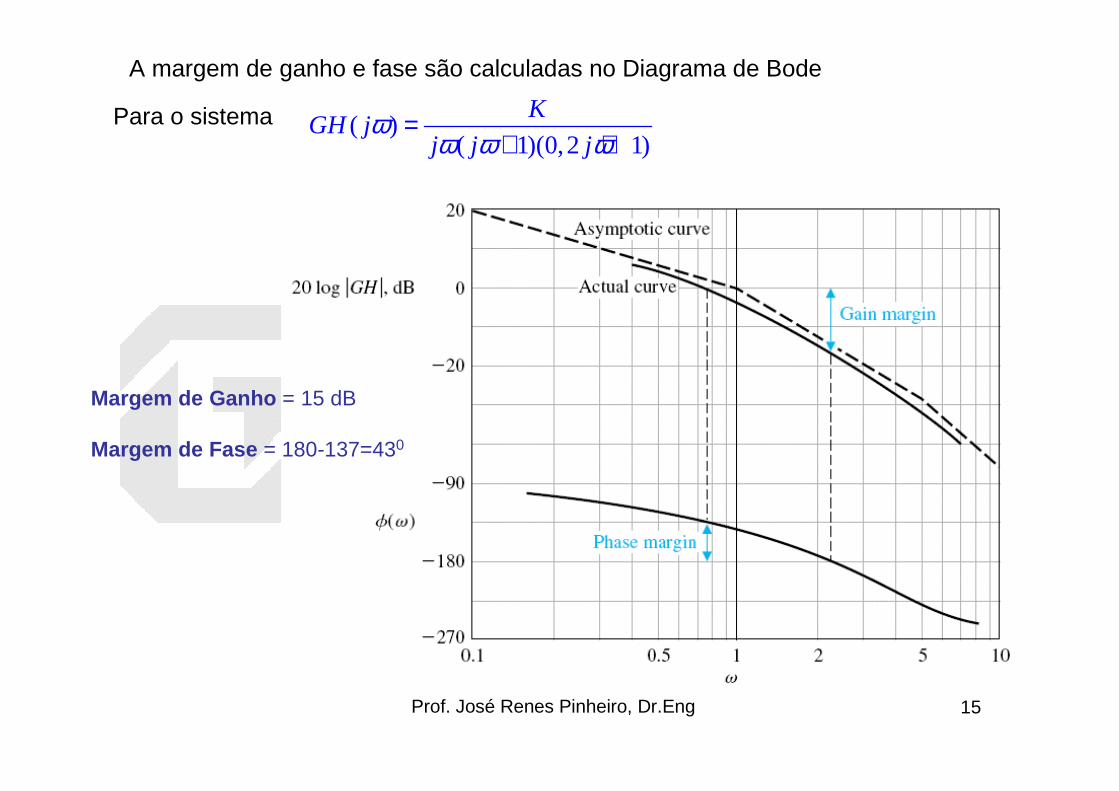
15Prof. José Renes Pinheiro, Dr.Eng
( )( 1)(0,2 1)
KGH j
j j jω
ω ω ω=
+ +
A margem de ganho e fase são calculadas no Diagrama de Bode
Para o sistema
Margem de Ganho = 15 dB
Margem de Fase = 180-137=430

16Prof. José Renes Pinheiro, Dr.Eng
1( )( 1)(0,2 1)
KGH j
j j jω
ω ω ω=
+ +
2 2( )
( 1)
KGH j
j jω
ω ω=
+
A resposta de freqüência de um sistema pode ser retratada por um diagrama cujos eixos são magnitude logarítmica e o ângulo de fase (Diagrama de Nichols).
Exemplos comparativos:
MG1= 15 dB, e MF1= 430
MG2= 5,7 dB, e MF2= 200
Quanto o sistema GH2(jω) é menos estável que GH2(jω) ?