MODELAGEM CINEMÁTICA DE ROBÔ INDUSTRIAL · de seu tamanho e de sua configuração cinemática....
17
Construindo Hoje a Engenharia do Amanhã Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial MODELAGEM CINEMÁTICA DE ROBÔ INDUSTRIAL Evandro Bertoldi (1) ([email protected]), Everton Bertoldi (2) ([email protected]), Nara Liege Barbieri (3) ([email protected]) (1) Universidade Regional do Noroeste do Estado do Rio Grande do Sul (UNIJUÍ); Departamento de Engenharia Mecânica. (2) Universidade de Passo Fundo (UPF); Departamento de Engenharia de Produção Mecânica. (3) Universidade de Passo Fundo (UPF); Departamento de Agronomia. RESUMO: Um robô é um manipulador, reprogramável e projetado para deslocar materiais, partes, ferramentas, ou dispositivos, através de movimentos variáveis programados para o desempenho de uma variedade de tarefas, ou seja, um robô industrial é um manipulador, com propósito geral, constituído estruturalmente de vários segmentos mecânicos rígidos ligados em série por juntas e tendo na extremidade uma garra ou ferramenta. Esse estudo trata-se do problema de modelagem cinemática de robô industrial com o objetivo de demonstrar a modelagem de um robô com estrutura cinemática do tipo prismática, rotativa, rotativa (PRR), a partir da identificação dos elos e juntas, definição das coordenadas de referência, determinação dos parâmetros de Denavit-Hartenberg (D-H), matriz de transformação homogênea, e cálculo da velocidade e posição do efetuador final em relação à base fixa, através da matriz jacobiana. Através desse desenvolvimento, pode-se verificar que durante o projeto de um robô, antes da escolha e do dimensionamento de componentes, necessita-se o conhecimento sobre modelagem cinemática de robô industrial. A partir da modelagem cinemática do robô, percebe-se que é possível através de cálculos, saber qual será a posição do efetuador final, e definir quanto será a contribuição de cada junta para a velocidade do mesmo. PALAVRAS-CHAVE: Modelagem Cinemática, Robô Industrial, Estrutura Prismática, Estrutura Rotativa, Parâmetros de Denavit-Hartenberg. INDUSTRIAL ROBOT KINEMATIC MODELING ABSTRACT: A robot is an operator, reprogrammable and designed to move materials, pieces, tools or devices, trough variable and programmed movements to perform many tasks, in other words, an industrial robot is an operator, with general purpose, made structurally from many mechanic rigid segments connected in series by joints and having on its extremity a claw or tool. This study is about the industrial robot kinematic modeling problem aiming to demonstrate the modeling of a robot with kinematic structure of the type prismatic, rotating, rotating (PRR), from the identification of the links and joints, reference coordinating definition, Denavit- Hartenberg (D-H) determining parameters, homogenous transformation matrix, speed calculation and final effector position in relation to the fixed base, through Jacobian matrix. Through this development, it is verified that during the design of a robot, before the choice and components dimensioning, it is necessary knowledge about industrial robot kinematic. From the kinematic modeling of the robot, we see it is possible, by calculation, to know what will be the final effector position, and to define how much will be the contribution of each joint for its speed. KEYWORDS: Kinematic Modeling, Industrial Robot, Prismatic Structure, Rotative Structure, Denavit- Hartenberg Parameters.
Transcript of MODELAGEM CINEMÁTICA DE ROBÔ INDUSTRIAL · de seu tamanho e de sua configuração cinemática....

Construindo Hoje a Engenharia do Amanhã Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
MODELAGEM CINEMÁTICA DE ROBÔ INDUSTRIAL
Evandro Bertoldi (1)
([email protected]), Everton Bertoldi (2)
Nara Liege Barbieri (3)
(1) Universidade Regional do Noroeste do Estado do Rio Grande do Sul (UNIJUÍ); Departamento de Engenharia Mecânica.
(2) Universidade de Passo Fundo (UPF); Departamento de Engenharia de Produção Mecânica. (3) Universidade de Passo Fundo (UPF); Departamento de Agronomia.
RESUMO: Um robô é um manipulador, reprogramável e projetado para deslocar materiais, partes,
ferramentas, ou dispositivos, através de movimentos variáveis programados para o desempenho de uma
variedade de tarefas, ou seja, um robô industrial é um manipulador, com propósito geral, constituído
estruturalmente de vários segmentos mecânicos rígidos ligados em série por juntas e tendo na extremidade
uma garra ou ferramenta. Esse estudo trata-se do problema de modelagem cinemática de robô industrial
com o objetivo de demonstrar a modelagem de um robô com estrutura cinemática do tipo prismática,
rotativa, rotativa (PRR), a partir da identificação dos elos e juntas, definição das coordenadas de
referência, determinação dos parâmetros de Denavit-Hartenberg (D-H), matriz de transformação
homogênea, e cálculo da velocidade e posição do efetuador final em relação à base fixa, através da matriz
jacobiana. Através desse desenvolvimento, pode-se verificar que durante o projeto de um robô, antes da
escolha e do dimensionamento de componentes, necessita-se o conhecimento sobre modelagem cinemática
de robô industrial. A partir da modelagem cinemática do robô, percebe-se que é possível através de
cálculos, saber qual será a posição do efetuador final, e definir quanto será a contribuição de cada junta
para a velocidade do mesmo.
PALAVRAS-CHAVE: Modelagem Cinemática, Robô Industrial, Estrutura Prismática, Estrutura
Rotativa, Parâmetros de Denavit-Hartenberg.
INDUSTRIAL ROBOT KINEMATIC MODELING
ABSTRACT: A robot is an operator, reprogrammable and designed to move materials, pieces, tools or
devices, trough variable and programmed movements to perform many tasks, in other words, an industrial
robot is an operator, with general purpose, made structurally from many mechanic rigid segments
connected in series by joints and having on its extremity a claw or tool. This study is about the industrial
robot kinematic modeling problem aiming to demonstrate the modeling of a robot with kinematic structure
of the type prismatic, rotating, rotating (PRR), from the identification of the links and joints, reference
coordinating definition, Denavit- Hartenberg (D-H) determining parameters, homogenous transformation
matrix, speed calculation and final effector position in relation to the fixed base, through Jacobian matrix.
Through this development, it is verified that during the design of a robot, before the choice and components
dimensioning, it is necessary knowledge about industrial robot kinematic. From the kinematic modeling of
the robot, we see it is possible, by calculation, to know what will be the final effector position, and to define
how much will be the contribution of each joint for its speed.
KEYWORDS: Kinematic Modeling, Industrial Robot, Prismatic Structure, Rotative Structure, Denavit-
Hartenberg Parameters.
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 2
1. INTRODUÇÃO
A história da automatização industrial é caracterizada por períodos de rápidas mudanças nos
métodos de produção. Como uma causa, ou talvez como um efeito, esses períodos de mudanças nas
técnicas de automatização, e também nas técnicas de produção, está intimamente ligado às situações
econômicas. O uso de robôs industriais caracteriza a direção do desenvolvimento da automatização
industrial nos últimos tempos.
Atualmente a robótica tem sido um tema bastante utilizado tanto no meio industrial quanto
no meio acadêmico. Tal fato se deve à sua diversificada utilização, a qual proporciona de modo
geral, êxito em questões levantadas como redução de custos, aumento da produtividade, problemas
trabalhistas com funcionários e segurança a vida humana. Tais vantagens decorrentes da utilização
de robôs permitem afirmar que esta área tende a crescer cada vez mais, abrangendo uma série de
aplicações (NETO e REIMBOLD, 2011).
A economia brasileira vem crescendo de forma constante, isso faz com que o país necessite
cada vez mais de tecnologias que tornem o processo de produção industrial mais rápido, pois são as
indústrias as principais responsáveis pelo crescimento acelerado do Brasil (MARTINS, OSINSKI e
RASIA, 2012).
De acordo com Valdiero (2005), um braço mecânico controlado por computador, sem
dúvida define-se como um robô. Quando um dispositivo mecânico pode ser programado para
realizar grande leque de tarefas é considerado provavelmente um robô industrial.
A definição formal de um robô industrial enfrenta certas dificuldades devido a algumas
diferenças conceituais adotadas por alguns mercados como: mercado asiático e mercado euro-
americano. Para os japoneses, um robô é qualquer dispositivo mecânico dotado de articulações
móveis destinadas à manipulação. Já o mercado ocidental é mais restritivo, exigindo um maior grau
de complexidade, sobre tudo no que se refere à forma de controle adotada. A definição mais aceita é
a empregada pela Associação Internacional de Robótica (RIA), segundo a qual, um robô industrial é
um manipulador multifuncional reprogramável, capaz de mover materiais, peças, ferramentas ou
dispositivos especiais, em trajetórias variáveis e programadas para realizar tarefas diversas
(BARRIENTOS e PENIN, 1997).
Com respeito à estrutura, um robô é um sistema mecânico de geometria variada, composto
por corpos rígidos, articulados entre si, destinados a sustentar, posicionar e orientar a ferramenta
terminal (ROSÁRIO, 2005). Atualmente existem diversos tipos de robôs para a execução de
diversas tarefas. A especialidade que o robô pode vir assumir depende muito do tipo de atividade
que ele irá desempenhar, e principalmente do ambiente em que ele estará inserido. Um robô
manipulador é normalmente constituído por um conjunto de corpos rígidos ligados em série por
intermédio de juntas rotativas ou prismáticas, formando uma cadeia cinemática aberta, onde uma
das extremidades do manipulador encontra-se rigidamente ligada a uma base fixa, enquanto que a

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 3
extremidade oposta suporta o efetuador que pode mover-se livremente no espaço (LOPES, 2001).
Podemos também classificá-los segundo uma característica arbitrada, como: mobilidade, tipo de
atividade, forma, etc (GRAIG,1989).
A aplicação de robôs na indústria moderna é uma realidade cada vez mais evidente.
Diversos segmentos industriais têm feito uso de robôs em atividades como: soldagem por
resistência por pontos, manipulação de materiais, soldagem por arco, pintura, corte a jato de água,
corte por gás, acabamento e montagem, etc. Podemos citar a indústria automobilística e petrolífera
como os segmentos que mais investem em robótica. O crescimento do uso de robôs na indústria é
hoje motivado, por um lado, pelo aumento do custo da mão-de-obra e, por outro, pela melhoria de
produtividade, da qualidade, das condições de segurança e qualidade de vida que a utilização de
robôs traz, sobretudo quando eles substituem o homem na realização de tarefas perigosas. Por fim, a
queda no custo dos robôs também tem contribuído para a disseminação de seu uso (ROSÁRIO,
2005).
Esse estudo trata-se do problema de modelagem cinemática de um robô industrial a ser
utilizado em tarefas como manipular uma tocha de solda ou movimentar peças, a partir de um robô
com estrutura cinemática do tipo prismática, rotativa, rotativa (PRR).
Tem-se como objetivo, demonstrar como se calcula a modelagem cinemática de um robô
considerando três graus de liberdade e estrutura cinemática do tipo PRR, a partir da identificação
dos elos e juntas e definição das coordenadas de referência de cada elo de acordo com a convenção
de Denavit-Hartenberg (D-H), determinação dos parâmetros de D-H, matriz de transformação
homogênea, e cálculos das velocidades e posição do efetuador final em relação à base fixa, através
da matriz jacobiana.
2. ROBÔ INDUSTRIAL A SER MODELADO
O desenvolvimento da modelagem cinemática baseou-se no robô industrial modelo KR 30
JET KRC2 da marca Kuka ilustrado na Figura 1 (http://www.used-robots.com). No
desenvolvimento analisaram-se três graus de liberdade e considerou-se estrutura cinemática do tipo
PRR.
Esses robôs industriais podem ser montados tanto pela cabeça quanto lateralmente. Os
diversos modelos de pórtico e uma unidade linear ajustada de acordo com as necessidades de
produção individuais garantem que seja utilizado o sistema de automatização mais adequado para
cada processo de produção (http://www.used-robots.com).
A precisão de um robô pode ser definida como sendo a diferença entre a posição
programada e a posição real do manipulador depois da execução do movimento programado. A
precisão de um robô do ponto de vista mecânico depende da rigidez da estrutura, dos jogos e atritos
nas juntas e da qualidade da fabricação dos componentes em geral. Do ponto de vista do controle,

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 4
essa precisão depende dos erros do cálculo das coordenadas, da precisão da calibração, das
diferenças entre o modo do ensaio e a execução do movimento e da precisão dos sensores de
posição (VALDIERO, 2005).
FIGURA 1. Manipulador robótico modelo KR 30 JET KRC2 da marca Kuka.
O robô industrial modelo KR 30 JET KRC2 possui área de trabalho a partir de um raio de
alcance de 2002 mm, estrutura articulada com seis eixos, capacidade de carga de 30 kg, precisão de
±0.1 mm. As posições de montagem podem ser no chão ou teto e seu peso total é de
aproximadamente 435 kg (http://www.used-robots.com).
Esses robôs podem ser utilizados em diversas áreas como: manipulação, carga e descarga,
pintura e tratamento de superfície, fixação, forjarias, manipulação de outras máquinas,
empacotamento e escolha de pedidos, fundições, processamento de plásticos, ferramentas de
conformação, montagem, ferramentas de corte, entre outras aplicações (http://www.used-
robots.com).
O espaço de trabalho do manipulador é o termo que se refere ao espaço dentro do qual este
pode movimentar o efetuador. É definido como o volume total conformado pelo percurso do
extremo do último elo, o punho, quando o manipulador efetua todas as trajetórias possíveis
(PAZOS, 2002). De acordo com Valdiero (2005), o espaço de atuação de um manipulador depende
de seu tamanho e de sua configuração cinemática.
Esse espaço pode ser dividido em duas regiões, sendo a primeira região onde todos os graus
de liberdade são atuantes e a segunda região onde nem todos os graus de liberdade estão atuando.
Essas limitações são causadas pelos limites de atuação das juntas, pela definição dos ângulos entre
os eixos de rotações das juntas, pelas dimensões dos componentes do manipulador ou pela
combinação dessas limitações. As limitações da rotação ou do deslocamento das juntas precisam ser
escolhidas de tal maneira que deixem margem de espaço de atuação para a reorientação das
ferramentas ou garras do robô (VALDIERO, 2005).

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 5
O espaço de atuação do manipulador robótico estudado é representado na Figura 2
(http://www.used-robots.com).
FIGURA 2. Espaço de atuação para o sistema de coordenadas do manipulador robótico modelo KR
30 JET KRC2 da marca Kuka.
3. MATERIAIS E MÉTODOS
3.1 Modelagem cinemática do robô
Conforme descrito em Valdiero (2005), cinemática é a ciência que trata os movimentos sem
considerar as forças que os causam. Dentro da cinemática, estuda-se a posição, a velocidade, a
aceleração e as demais derivadas de ordem superior das variáveis de posição. Assim, o estudo
cinemático dos manipuladores refere-se a todas as propriedades geométricas e às propriedades do
movimento dependentes do tempo.
A cinemática direta de um manipulador robótico trata-se das equações da posição e da
orientação do efetuador final, garra ou ferramenta, a partir dos valores das variáveis de juntas.
A seguir, apresenta-se a modelagem cinemática do referido robô industrial. Inicialmente
identificaram-se os elos e juntas, em seguida definiram-se as coordenadas de referência de cada elo
segundo a convenção de D-H, posteriormente determinou-se os parâmetros cinemáticos de D-H
representando os mesmos a partir de uma tabela, e em seguida desenvolveu-se a matriz de
transformação homogênea. Com base na matriz de transformação homogênea, calculou-se o
jacobiano para a obtenção das velocidades de cada elo e também a velocidade do efetuador final em
relação à base zero, que é a única base fixa do robô.
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 6
A modelagem cinemática do robô industrial baseou-se na metodologia descrita em Valdiero
(2005) e Santos (2004), no qual é dividida em cinco passos: entender o robô identificando-se os elos
e as juntas, definir um sistema de coordenadas de referência em cada elo de acordo com a
convenção de D-H, especificação da posição e orientação do sistema de referência através dos
parâmetros de D-H, dedução da matriz de transformação homogênea que relaciona os sistemas de
referência e calcular a equação matricial da cinemática direta através do produto à esquerda.
3.1.1 Escolha dos sistemas de referência, elos e juntas pela convenção de Denavit-Hatenberg
Valdiero (2005) descreve que existe uma enorme variedade de caminhos durante o processo
de projeto para a realização de um robô industrial, como, por exemplo, a variedade dos sistemas de
coordenadas, na base dos quais o manipulador pode ser construído.
A evolução no tempo das coordenadas das juntas de um robô representa o modelo
cinemático de um sistema articulado no espaço tridimensional. A notação de D-H é uma ferramenta
utilizada para sistematizar a descrição cinemática de sistemas mecânicos articulados com n graus de
liberdade (DENAVIT, 1955).
Para se descrever a posição e a orientação de um corpo no espaço, necessita-se fixar um
sistema de coordenadas para esse corpo. Já que qualquer sistema de coordenadas pode servir como
um sistema de referência, necessita-se transformar a descrição da posição e da orientação dos
objetos de um sistema de coordenadas para outro. A matemática providencia metodologias para
descrição e manipulação dessas quantidades (VALDIERO, 2005).
Um manipulador consiste de juntas e barras. Barras quase rígidas são ligadas através das
juntas, no qual permitem o movimento relativo das barras. As juntas normalmente são equipadas
com sensores de posição que permitem medir a posição relativa das barras ligadas à junta. Em caso
de junta rotativa, o deslocamento da junta é chamado ângulo da junta. Em caso de junta prismática,
o sensor mostra o deslocamento linear da junta. O número de graus de liberdade do manipulador é
igual ao número de variáveis de posição independentes que precisam ser especificadas para definir a
localização de todas as partes do mecanismo (VALDIERO, 2005).
Conforme descrito anteriormente, existem dois tipos de juntas: a prismática e a rotativa. A
junta prismática tem movimento linear. Os robôs com juntas prismáticas de eixos perpendiculares
são fáceis para operar e para calcular as posições desejáveis das juntas para qualquer posição da
garra. Os robôs com juntas rotativas normalmente são mais difíceis para controlar, entretanto é mais
fácil projetar e construir uma boa junta rotativa do que uma junta prismática (VALDIERO, 2005).
Um lado da cadeia cinemática do manipulador é fixo, sendo o outro lado livre. Esse lado
livre pode ser chamado como ponta de atuação do manipulador. Dependendo da aplicação do robô,
na ponta de atuação pode ser montada uma garra, um dispositivo para solda, um eletroímã ou outras
ferramentas. Geralmente, a descrição da posição de um manipulador é dada através da descrição da

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 7
posição do sistema de coordenadas da ferramenta em relação ao sistema de coordenadas da base
fixa do manipulador (VALDIERO, 2005).
A partir do primeiro e segundo passo da metodologia para determinação da cinemática direta
de robô industrial, descrita em Valdiero (2005) e Santos (2004), determinou-se os elos, juntas e os
sistemas de coordenadas de referência de cada elo.
Primeiramente analisou-se o robô industrial a fim de entendê-lo para em seguida identificar
os elos e juntas conforme indicado na Figura 3.
Em seguida, definiu-se o sistema de coordenadas de referência em cada elo, conforme
Figura 3, de acordo com a convenção de D-H no qual descreve o seguinte:
Em cada junta “i” deve-se representar o eixo Zi-1;
Na normal comum entre Zi-1 e Zi representa-se o eixo Xi, no sentido de Zi-1 para Zi;
Para Yi, representa-se através da regra da mão direita.
FIGURA 3. Robô industrial com a identificação dos elos, juntas e sistemas de coordenadas de
referência.
3.1.2 Parâmetros de Denavit-Hartenberg
Após definidos os elos, juntas e os sistemas de coordenadas de referência para cada elo do
robô industrial, aplicou-se o terceiro passo da metodologia da cinemática direta para a especificação
da posição e orientação do sistema de referência “i”, conforme descrito em Valdiero (2005) e
Santos (2004).
No estudo dos manipuladores existe uma preocupação constante com a localização de
objetos no espaço tridimensional. Esses objetos são elementos do manipulador, peças e ferramentas
manipuladas e outros objetos no ambiente de trabalho do robô. De modo simplificado, pode-se falar

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 8
que esses objetos são descritos através de dois atributos: posição e orientação. Um tópico de
interesse imediato é a maneira pela qual nós representamos essas quantidades e as manipulamos
matematicamente (VALDIERO, 2005).
A representação D-H de um elo rígido depende de quatro parâmetros a ele associados, os
quais descrevem completamente o comportamento cinemático de uma junta prismática ou revoluta
(ROSÁRIO, 2005). Especifica-se a posição e orientação do sistema de referência “i” em relação ao
sistema de referência “i-1” através dos parâmetros de D-H, conforme ilustrado na Tabela 1, no qual
relaciona os valores de ai, θi, αi e di que possuem as seguintes definições:
ai: é a distância entre os eixos Zi-1 e Zi;
θi: é o ângulo entre os eixos Xi-1 e Xi em torno do eixo Zi-1. Quando se tem junta rotativa, θi
será variável, e quando tem-se junta prismática, θi será constante;
αi: é o ângulo entre os eixos Zi-1 e Zi em torno do eixo Xi;
di: é a coordenada ao longo do eixo Zi-1, no qual representa a posição de Xi em relação à Xi-
1.
TABELA 1. Parâmetros de D-H.
Parâmetros D-H
eloi ai θi αi di
elo1 a1 θ1 α1 d1
elo2 a2 θ2 α2 d2
elo3 a3 θ3 α3 d3
Na Figura 4, indicam-se os parâmetros de D-H para o robô industrial de acordo com os
valores apresentados na Tabela 1 e especificações técnicas do robô industrial modelo KR 30 JET
KRC2 da marca Kuka.
FIGURA 4. Especificação dos parâmetros de D-H para o robô industrial.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 9
A Tabela 2 representa os valores de ai, θi, αi e di para o robô industrial de acordo com as
especificações da Tabela 1 e Figura 4.
TABELA 2. Parâmetros de D-H.
Parâmetros D-H
eloi ai θi αi di
elo1 489 0 0 d1
elo2 825 θ2 0 0
elo3 1003 θ3 0 0
3.1.3 Cálculo das matrizes de transformação homogênea
Na sequência, calculam-se as matrizes de transformação homogênea através do quarto passo
da metodologia da cinemática direta descrita em Valdiero (2005) e Santos (2004).
Uma vez determinados os parâmetros de D-H, deduziu-se a matriz de transformação
homogênea, no qual relaciona o sistema de referência “i” em relação ao sistema de referência “i-1”.
Na Equação 1, representa-se a fórmula da matriz de transformação homogênea para o robô
industrial em estudo.
i-1 A i =
[
] (1)
O cálculo de cada matriz de transformação homogênea entre um elo e o anterior conforme
D-H, é representado a partir das Equações 2, 3 e 4.
A Equação 2 representa a matriz de transformação homogênea entre o elo 1 e o elo 0.
0 A 1 = [
] (2)
A Equação 3 representa a matriz de transformação homogênea entre o elo 2 e o elo 1.
1 A 2 = [
] (3)
A Equação 4 representa a matriz de transformação homogênea entre o elo 3 e o elo 2.
2 A 3 = [
] (4)

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 10
3.1.4 Matriz de transformação para o sistema de referência da base
Após o cálculo das matrizes de transformação homogênea, calcula-se o produto das matrizes
pela esquerda até obter a matriz de transformação que relaciona o último sistema de referência ao
sistema da base, no qual se trata do quinto passo da metodologia da cinemática direta descrita em
Valdiero (2005) e Santos (2004).
O quinto passo trata-se do cálculo da equação matricial da cinemática direta. A partir de
cada matriz de transformação homogênea que relaciona o elo com o anterior, pode-se calcular a
equação da cinemática direta por meio do produto à esquerda.
As matrizes de transformação de cada elo devem ser multiplicadas pela esquerda, ou seja,
deve-se multiplicar a matriz do elo 1 para o 0 pela matriz do elo 2 para o 1. Essa multiplicação gera
uma matriz transformada do elo 2 para o 0 representado na Equação 5.
0 T 2 =
0 A 1 .
1 A 2 = [
] (5)
Dessa forma, faz-se mais uma multiplicação, agora a matriz do elo 2 para o 0 multiplica-se
pela matriz do elo 3 para o 2, obtendo-se a matriz transformada do elo 3 para o 0 representado na
Equação 6. 0 T 3 =
0 T 2 .
2 A 3 =
[
](6)
A partir da matriz de transformação homogênea denominada de 0 T 3, representado pela
Equação 6, mostra-se a posição e orientação do efetuador final do robô industrial no sistema da base
em função das variáveis de junta.
Conforme Equação 6, o vetor posição do efetuador final do robô industrial no sistema da
base em função das variáveis de junta é representado na Tabela 3 e Figura 5 em função de: P3X, P3Y,
P3Z.
TABELA 3. Posição do efetuador final do robô industrial.
Posição do efetuador final do robô
0 P 3
P3X 1003.cosθ2.cosθ3 – 1003.senθ2.senθ3 + 825.cosθ2 + 489
P3Y 1003.senθ2.cosθ3 + 1003.cosθ2.senθ3 + 825.senθ2
P3Z d1

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 11
FIGURA 5. Posição do efetuador final do robô industrial.
De acordo com a Equação 6, a orientação do efetuador final do robô industrial no sistema da
base em função das variáveis de junta é representada na Tabela 4 e Figura 6 em função de: X3, Y3,
Z3.
TABELA 4. Orientação do efetuador final do robô industrial.
Orientação do efetuador final do robô
Orientação de 0
X 3 Orientação de 0
Y 3 Orientação de 0
Z 3
cosθ2.cosθ3 - senθ2.senθ3 -cosθ2.senθ3 - senθ2.cosθ3 0
senθ2.cosθ3 + cosθ2.senθ3 -senθ2.senθ3 + cosθ2.cosθ3 0
0 0 1
FIGURA 6. Orientação do efetuador final do robô industrial.
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 12
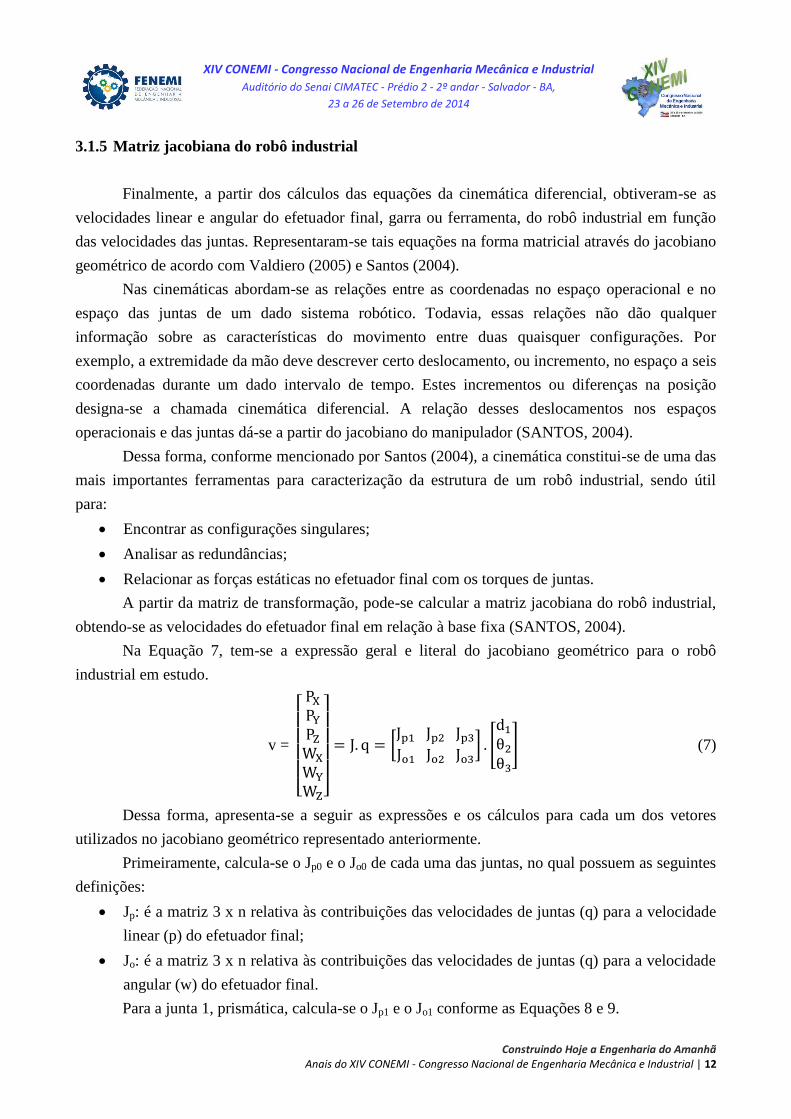
3.1.5 Matriz jacobiana do robô industrial
Finalmente, a partir dos cálculos das equações da cinemática diferencial, obtiveram-se as
velocidades linear e angular do efetuador final, garra ou ferramenta, do robô industrial em função
das velocidades das juntas. Representaram-se tais equações na forma matricial através do jacobiano
geométrico de acordo com Valdiero (2005) e Santos (2004).
Nas cinemáticas abordam-se as relações entre as coordenadas no espaço operacional e no
espaço das juntas de um dado sistema robótico. Todavia, essas relações não dão qualquer
informação sobre as características do movimento entre duas quaisquer configurações. Por
exemplo, a extremidade da mão deve descrever certo deslocamento, ou incremento, no espaço a seis
coordenadas durante um dado intervalo de tempo. Estes incrementos ou diferenças na posição
designa-se a chamada cinemática diferencial. A relação desses deslocamentos nos espaços
operacionais e das juntas dá-se a partir do jacobiano do manipulador (SANTOS, 2004).
Dessa forma, conforme mencionado por Santos (2004), a cinemática constitui-se de uma das
mais importantes ferramentas para caracterização da estrutura de um robô industrial, sendo útil
para:
Encontrar as configurações singulares;
Analisar as redundâncias;
Relacionar as forças estáticas no efetuador final com os torques de juntas.
A partir da matriz de transformação, pode-se calcular a matriz jacobiana do robô industrial,
obtendo-se as velocidades do efetuador final em relação à base fixa (SANTOS, 2004).
Na Equação 7, tem-se a expressão geral e literal do jacobiano geométrico para o robô
industrial em estudo.
v =
[
]
[
] [
] (7)
Dessa forma, apresenta-se a seguir as expressões e os cálculos para cada um dos vetores
utilizados no jacobiano geométrico representado anteriormente.
Primeiramente, calcula-se o Jp0 e o Jo0 de cada uma das juntas, no qual possuem as seguintes
definições:
Jp: é a matriz 3 x n relativa às contribuições das velocidades de juntas (q) para a velocidade
linear (p) do efetuador final;
Jo: é a matriz 3 x n relativa às contribuições das velocidades de juntas (q) para a velocidade
angular (w) do efetuador final.
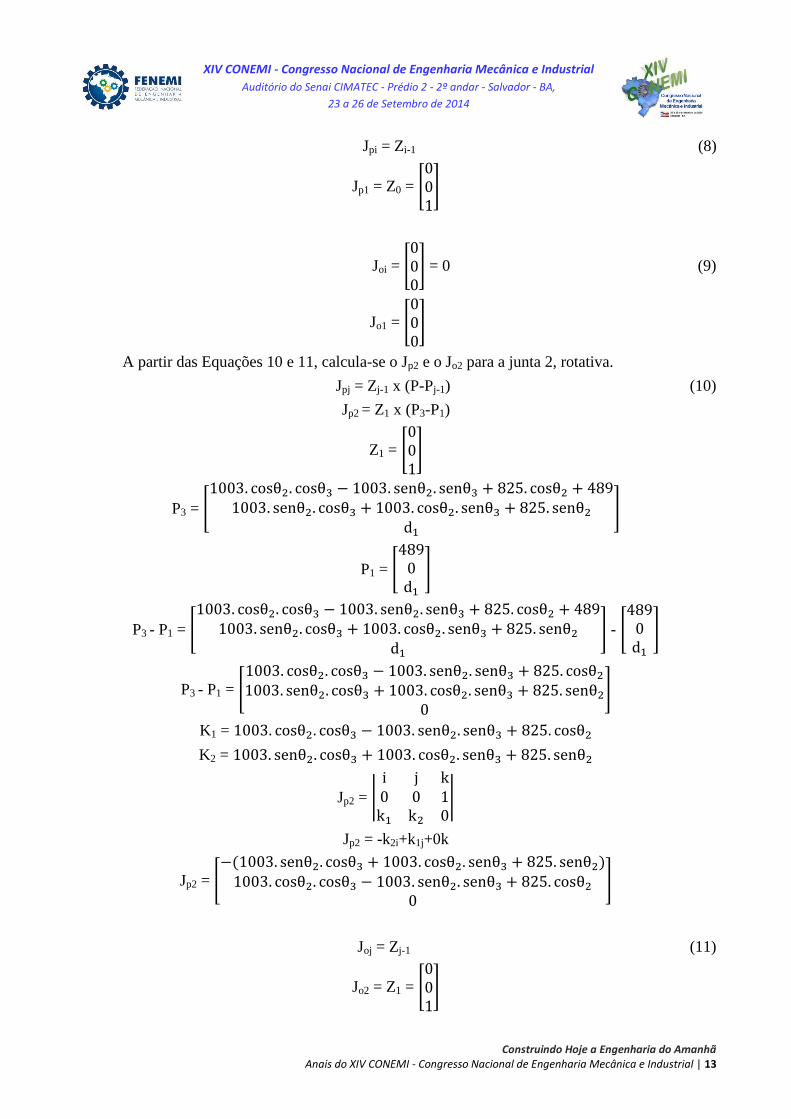
Para a junta 1, prismática, calcula-se o Jp1 e o Jo1 conforme as Equações 8 e 9.
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 13
Jpi = Zi-1 (8)
Jp1 = Z0 = [ ]
Joi = [ ] = 0 (9)
Jo1 = [ ]
A partir das Equações 10 e 11, calcula-se o Jp2 e o Jo2 para a junta 2, rotativa.
Jpj = Zj-1 x (P-Pj-1) (10)
Jp2 = Z1 x (P3-P1)
Z1 = [ ]
P3 = [
]
P1 = [
]
P3 - P1 = [
] - [
]
P3 - P1 = [
]
K1 =
K2 =
Jp2 = |
|
Jp2 = -k2i+k1j+0k
Jp2 = [
]
Joj = Zj-1 (11)
Jo2 = Z1 = [ ]

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 14
Para a junta 3, rotativa, têm-se as Equações 12 e 13 para o cálculo do Jp3 e Jo3.
Jpj = Zj-1 x (P-Pj-1) (12)
Jp3 = Z2 x (P3-P2)
Z2 = [ ]
P3 = [
]
P2 = [
]
P3 – P2 = [
] - [
]
P3 – P2 = [
]
K1 =
K2 =
Jp3 = |
|
Jp3 = -k2i+k1j+0k
Jp3 = [
]
Joj = Zj-1 (13)
Jo3 = Z2 = [ ]
A partir da Equação 14, realiza-se o cálculo final do jacobiano geométrico através da
equação matricial da cinemática diferencial.
v =
[
]
[
]
. [
] (14)

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 15
v =
[
]
[
]
Na Equação 15, realiza-se o cálculo da velocidade linear do efetuador final do robô
industrial no sistema da base em função das variáveis e das velocidades das juntas.
v = [
] [
](15)
Por último, a partir da Equação 16, calculam-se as velocidades angulares do efetuador final
do robô industrial no sistema da base em função das variáveis e das velocidades das juntas.
v = [
] [
] (16)
Finalmente, na Figura 7, representa-se graficamente a velocidade angular possível do
efetuador final a partir do desenho do robô industrial.
FIGURA 7. Velocidade angular do efetuador final do robô industrial.
4. RESULTADOS E CONCLUSÕES
O desenvolvimento do estudo da modelagem cinemática do robô industrial constituído de
uma estrutura cinemática do tipo PRR permitiu conhecer e entender o funcionamento de robôs

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 16
industriais que requerem movimentos para executar uma determinada função, possibilitando a
especificação das variáveis conhecidas e desconhecidas que atuam no robô através de desenhos
esquemáticos, além da aplicação das equações para realizar os cálculos das variáveis do robô a
partir das variáveis de projeto conhecidas.
A metodologia aplicada na modelagem cinemática do robô industrial permitiu orientar e
facilitar o desenvolvimento, possibilitando a realização do trabalho dentro do planejado, cumprindo
os objetivos estabelecidos. Através dessa metodologia, conseguiu-se entender o robô, identificar os
elos e juntas, definir um sistema de coordenas de referência para cada elo, especificar a posição e
orientação do sistema de referências, deduzir a matriz de transformação homogênea que relaciona
os sistemas de referência, e calcular a equação matricial da cinemática direta.
A modelagem cinemática do robô permitiu verificar que os objetivos principais foram
alcançados. Através da matriz de transformação homogênea, conseguiu-se verificar a posição do
efetuador final a partir dos ângulos de cada junta e comprimento dos elos. E através da matriz
jacobiana, pode-se definir a contribuição de cada junta para a velocidade do efetuador final.
Através desse desenvolvimento, pode-se verificar que durante o projeto de um robô, antes da
escolha e do dimensionamento de componentes, tais como a estrutura do manipulador, o tipo de
atuadores e transmissões, necessita-se o conhecimento sobre modelagem cinemática de robô
industrial. Também conseguiu-se verificar a importância dos robôs industriais para resolver ou
minimizar problemas do cotidiano, podendo serem usados como um manipulador de tocha de solda,
já que a velocidade para soldar necessita ser constante, e movimentar peças, ferramentas ou
dispositivos.
A modelagem de robôs industriais deve ser realizada, pois com ela consegue-se definir com
clareza onde ficará a garra ou ferramenta, conhecendo-se os ângulos de junta. Pode-se também
definir qual serão as velocidades do efetuador final em relação à base fixa.
REFERÊNCIAS
BARRIENTOS, A.; PENIN, L. F. B. C. Fundamentos de Robótica, 1 edn, MacGraw Hill, 1997.
DENAVIT, J. Description and Displacement Analysis of Mechanics Based on the 2x2 dual
Matrices. 1 edn, University of Northwestern, Evanston, 1955.
GRAIG, J. J. Introduction to Robotics: Mechanics and Control. 2 edn, Mac Graw Hill, 1989.
LOPES, A. M. Robótica Industrial. Universidade do Porto, 2001.
MARTINS, S.; OSINSKI, C.; RASIA, L. A. Desenvolvimento de Encapsulamento e Eletrônica
Embarcada para Transdutores de Pressão para uso de Automação Industrial e em Dispositivos
Robóticos. XX Seminário de Iniciação Científica, UNIJUÍ, 2012.
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 17
NETO, D. M.; REIMBOLD, M. M. P. Desenvolvimento de um Robô Hexápode (Tipo Quatro
Barras) para Detecção de Falhas e Monitoramento em Sistemas de Distribuição de Energia Elétrica.
XIX Seminário de Iniciação Científica, UNIJUÍ, Panambi, 2011.
PAZOS, F. Automação de Sistemas e Robótia. 1edn, Axcel Books, Rio de Janeiro, Brasil, 2002.
ROBOT WORX. Industrial Robots, Kuka Robots for Sale, Used Robots from the Kuka Gantry
Series, Used KR 30 JET KRC2. Disponível em <http://www.used-robots.com>. Acesso em: 20 ago.
2014.
ROSÁRIO, J. M. Princípios de Mecatrônica. 1 edn, Prentice Hall, 2005.
SANTOS, V. M. F. Robótica Industrial: Apontamentos Teóricos e Exercícios para Aulas
Práticas. Departamento de Engenharia Mecânica – Universidade de Aveiro, 2004.
VALDIERO, A. C. Projeto Mecânico de Robôs Industriais. Programa de incentivo à produção
docente: Coleção Cadernos Unijuí - Série Tecnologia Mecânica n. 9, Editora Unijuí, Ijuí, 2005.