Prática 05
24
UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET Dept : Engenharia Elétrica Data de Realização: 04/06/2014 Data de Entrega : 11/06/2014 Interfaceamento de Sistemas Prof. Roberto Santos Inoue Relatório N° : 05 Nome da Prática : Aferição de Velocidade pelo Encoder em Quadratura Nome RA Bruna Souza Moraes 41190 6 Guilherme Cunha Yuki 34872 4
-
Upload
helder-eiki-oshiro -
Category
Documents
-
view
24 -
download
0
Transcript of Prática 05
UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET
Dept : Engenharia Elétrica Data de Realização: 04/06/2014
Data de Entrega : 11/06/2014
Interfaceamento de Sistemas
Prof. Roberto Santos Inoue
Relatório N° : 05Nome da Prática : Aferição de Velocidade pelo Encoder em Quadratura
Nome RA
Bruna Souza Moraes 411906
Guilherme Cunha Yuki 348724
Helder Eiki Oshiro 383821
Leticia Oliveira de Deus 411949
Vitor Izumino Sgrignoli 383791
São Carlos2014

UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
Sumário1. INTRODUÇÃO............................................................................................................................3
2. MATERIAL...................................................................................................................................4
3. PROCEDIMENTO.........................................................................................................................4
4. RESULTADOS..............................................................................................................................4
4.1 Estudo do Encoder em Quadratura.....................................................................................4
4.2 Cálculo da Velocidade Angular a partir do Período..........................................................6
4.3 Cálculo da Velocidade Angular Utilizando uma Base de Tempo fixa............................7
5. PÓS-LABORATÓRIO...................................................................................................................8
Exercício 1......................................................................................................................................8
Pela fórmula:....................................................................................................................................15
6. CONCLUSÃO..............................................................................................................................17
2Interfaceamento de Sistemas
UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
1. INTRODUÇÃO
Os encoders são dispositivos eletromecânicos que podem medir movimento ou posição. A maioria utiliza sensores ópticos para fornecer sinais elétricos no formato de trens de pulsos que podem, por sua vez, ser traduzidos em movimento, direção ou posição.Fatores que afetam a aquisição de dados:
Número de pulsos por revolução do eixo (PPR)
Simetria dos pulsos
Existem quatro tipos de encoders: os simples, os incrementais, os de quadratura e os encoders absolutos.Os encoders incrementais e de quadratura identificam e contam pulsos elétricos além de reconhecer o sentido do movimento que gerou estes pulsos. Por exemplo, se uma roda girar, o encoder reconhecerá que a roda girou, o quanto ela girou e em qual sentido ela girou. A única diferença entre o encoder incremental e o encoder de quadratura é que a cada pulso que o incremental reconhece, o de quadratura reconhece dois, o que duplica sua leitura e, consequentemente, duplica sua precisão.
Figura 1 Componentes de um encoder ópticoUtilizando-se dois canais de leitura A e B, defasados 90º entre si, é possível determinar o sentido de rotação analisando se subida do clock A (ou descida) o canal B estiver em alta (ou em baixa).
Figura 2 Canais de leitura A e B
3Interfaceamento de Sistemas

UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
2. MATERIAL Fonte de alimentação variável Multímetro digital Osciloscópio D=digital Kit de motor DC + enconder em quadratura Kit de tacômetro digital Cabos para conexão entre os kits didáticos
3. PROCEDIMENTOo Aciona-se diretamente o Motor DC com a fonte de alimentação ajustável com tensão de
12V.
o Realiza-se a leitura do Canal A do encoder.
o Registra-se as formas de onda do Canal A e Canal B do encoder simultaneamente.
o Inverte-se a polaridade da tensão aplicada na tensão e registra-se as formas de onda do
Canal A e Canal B simultaneamente.
o Registra-se o sinal do canal Z do encoder.
4. RESULTADOS
4.1 Estudo do Encoder em Quadratura
Para uma alimentação de 12V no motor, a forma de onda obtida no canal A do encoder está na figura abaixo:
Figura 3 Saída do canal A do encoder para alimentação de 12V do motor.
É observável que a tensão de pico são os 12V da alimentação do motor.Também foi ligado e mensurado o canal B do encoder com o outro par de pontas
de prova do osciloscópio.
4Interfaceamento de Sistemas

UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
Figura 4 Saída do canal A e B do encoder para alimentação de 12V do motor.
É possível notar que ambos os canais apresentam saídas de mesma amplitude e frequência, porém defasados em cerca de 100º. O esperado era uma defasagem próxima de 90º, porém o resultado medidos pelo osciloscópio apresenta uma pequena margem de erro, também possui o erro do encoder e outros dos efeitos físicos envolvidos. Com essas considerações, o resultado obtido foi bem satisfatório.
Em seguida foi invertida a alimentação do motor, porém mantida a mesma tensão de 12V. Foram apenas invertidos os fios de ligação do motor com a fonte.
Figura 5 Saída do canal A e B do encoder para alimentação invertida de 12V do motor.
Apesar do motor ter invertido seu sentido de rotação, como esperado a defasagem manteve-se próxima de 100º, próxima a 90º, porém a ordem dos sinais se inverteram.
E também foi registrada a saída do canal Z do encoder.
5Interfaceamento de Sistemas

UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
Figura 6 Saída do canal Z do encoder para alimentação invertida de 12V do motor.
O Canal Z pulsa a cada volta completa. Com a alimentação em 12V, a frequência registrada foi de 20,79Hz.Isto equivale a1217 RPM.
4.2 Cálculo da Velocidade Angular a partir do Período
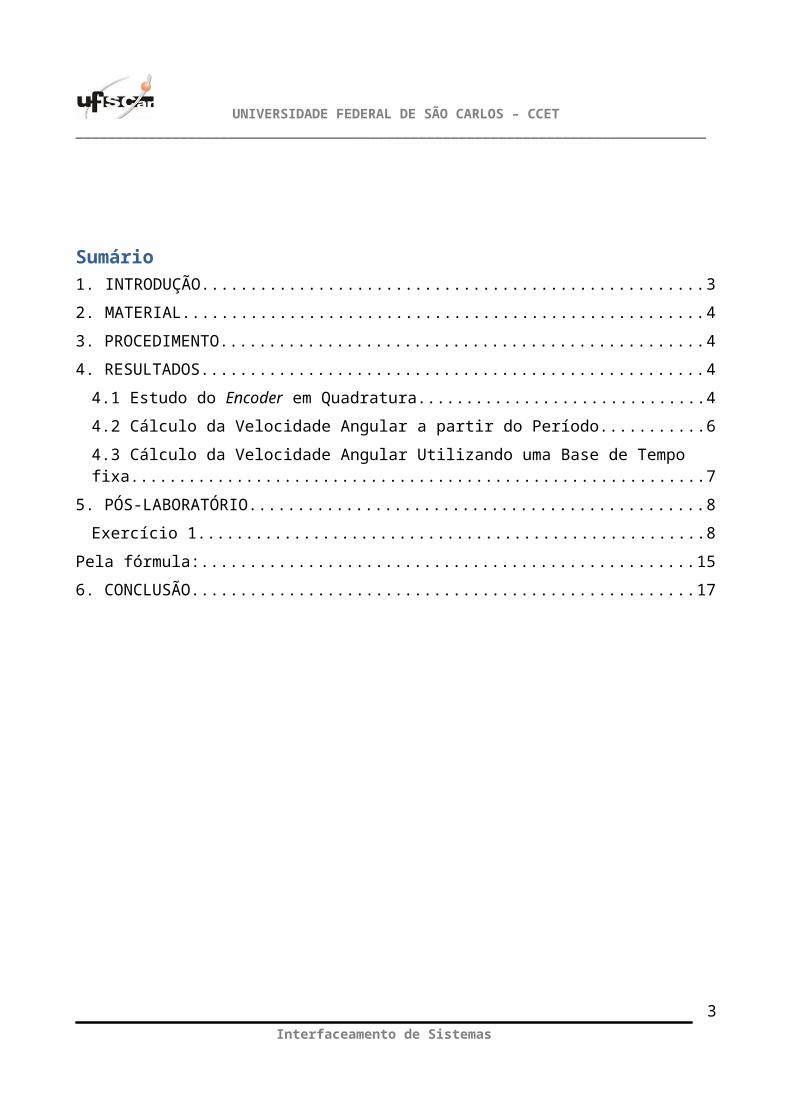
A partir das medições feitas no osciloscópio, para os diferentes valores de tensão,
foram preenchidos os dados da tabela 1.
vMDC
(V )T chA
(s)f chA(Hz)
Tac. Digital
ωMDC
(Hz)ωMDC
(rad /s)ωMDC
(rot /min)5 127,30 μ 7,85 k 818 7,85 42,32 471
10 58,36 μ 17,14 k 1940 17,14 107,69 102815 38,16 μ 26,21 k 2685 26,21 164,68 157320 28,17 μ 35,50 k 3630 35,50 223,05 213024 23,30 μ 42,92 k 4380 42,92 269,67 2575
Tabela 1 Tensão no motor e medição da velocidade angular.
Pelo datasheet do encoder a resolução dele é de N p=1000. Temos também que ΔT é o
período do pulso do sinal e f é a frequência do sinal. Assim para o cálculo das velocidades
angulares foram utilizadas as fórmulas a seguir.
O ΔN , número de pulsos é definido pela equação:
ΔN=f∗ΔT
Considerando f=f chA, a frequência do sinal sendo a frequência do canal A. Para ωMDC em Hertz:
6Interfaceamento de Sistemas

UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
ωMDC (Hz )= ΔNN p∗ΔT
=f chAN p
Para ωMDC em radianos por segundos:
ωMDC (rad /s )= 2πΔNN p∗ΔT
=2π f chAN p
Para ωMDC em rotações por minuto:
ωMDC (rot /min )= 60 ΔNN p∗ΔT
=60 f chA
N p
4.3 Cálculo da Velocidade Angular Utilizando uma Base de Tempo fixa
Escala(s/div)
Janela(s)
PulsosωMDC
(Hz)ωMDC
(rad /s)ωMDC
(rot /min)
100 μ 1 m 21 21 131,95 1260
50 μ 500 μ 11 22 138,23 1320
25 μ 250 μ 6 24 150,80 1440
10 μ 100 μ 2 20 125,66 1200
5 μ 50 μ 1 20 125,66 1200
Tabela 2 Medidas de velocidade angular com diferentes escalas de tempo fixas.
Para os cálculos foram utilizadas novamente as fórmulas, considerando o ΔN como
o número de pulsos contados no intervalo de janela definido e ΔT a janela definida.
Para ωMDC em Hertz:
ωMDC (Hz )= ΔNN p∗ΔT
Para ωMDC em radianos por segundos:
ωMDC (rad /s )= 2πΔNN p∗ΔT
Para ωMDC em rotações por minuto:
7Interfaceamento de Sistemas

UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
ωMDC (rot /min )= 60 ΔNN p∗ΔT
5. PÓS-LABORATÓRIO
Exercício 1
Considere um motor DC cuja a velocidade angular de operação é de no máximo
ωDC = 3000 RPM. O encoder acoplado em seu eixo apresenta uma resolução R= 360
pulsos por revolução. Um contador de 8 bits e sensível a borda de descida foi conectado
a um dos canais do encoder para aferição de velocidade. Diante dessas informações,
desenvolva as seguintes tarefas:
1. Determinar o número máximo de contagem do contador;
O número máximo de contagem do contador é obtido pela fórmula:
η=2v−1[ pulsos]
Com v sendo o número de bits do contador, logo o número máximo de contagem
do contador é:
η=28−1=255 pulsos
2. Calcule o tempo máximo de amostragem para mensurar a velocidade do motor
DC;
O tempo máximo de amostragem pode ser encontrado pela fórmula:
ΔT max=2π (2v−1)N pωmax
Substituindo os valores dados de resolução, no caso N p= R = 360
pulsos/revolução, velocidade angular de operação máxima e número de bits do contador:
ΔT max=2π (28−1)
360∗3000 2π60
= 2π∗2552π∗6∗3000
= 25518000
8Interfaceamento de Sistemas
UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
ΔT max=14,2milisegundos [ms]
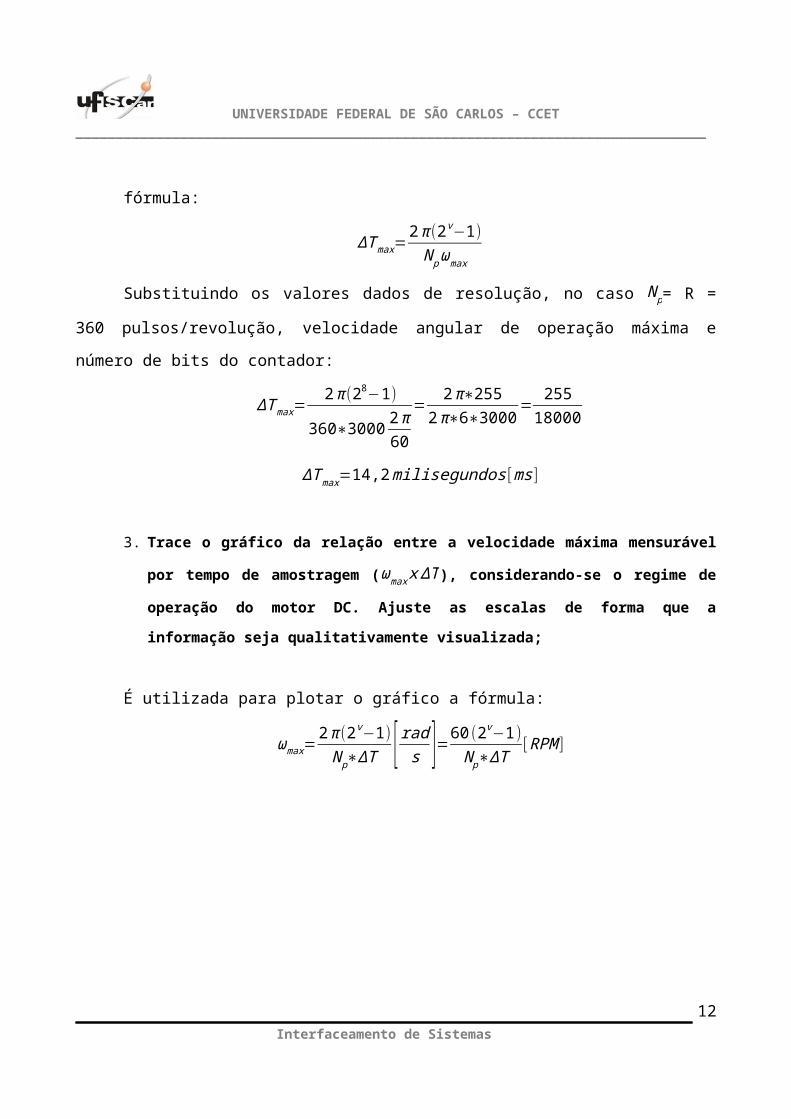
3. Trace o gráfico da relação entre a velocidade máxima mensurável por tempo de
amostragem (ωmax x ΔT ), considerando-se o regime de operação do motor DC.
Ajuste as escalas de forma que a informação seja qualitativamente visualizada;
É utilizada para plotar o gráfico a fórmula:
ωmax=2π (2v−1)N p∗ΔT [ rads ]=60(2
v−1)N p∗ΔT
[RPM ]
Figura 7 Relação de velocidade máxima mensurável por tempo de amostragem.
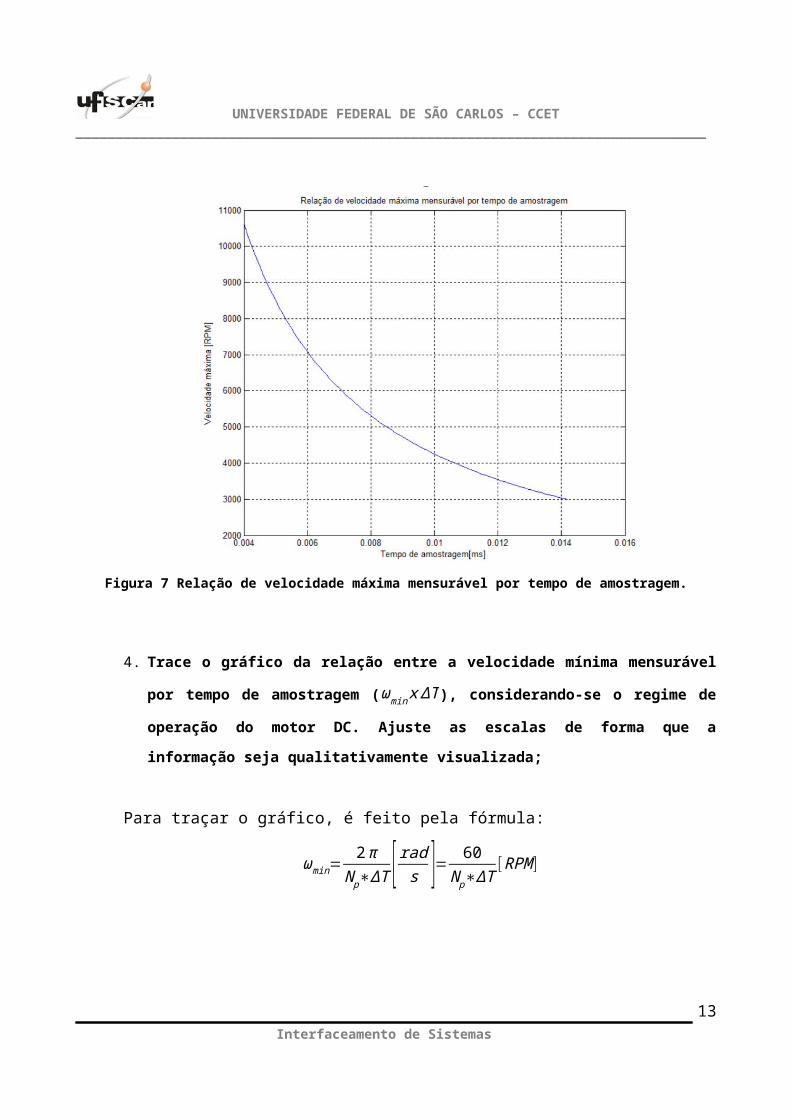
4. Trace o gráfico da relação entre a velocidade mínima mensurável por tempo de
amostragem (ωmin x ΔT ), considerando-se o regime de operação do motor DC.
Ajuste as escalas de forma que a informação seja qualitativamente visualizada;
Para traçar o gráfico, é feito pela fórmula:
9Interfaceamento de Sistemas

UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
ωmin=2π
N p∗ΔT [ rads ]= 60N p∗ΔT
[RPM ]
Figura 8 Relação de velocidade mínima mensurável por tempo de amostragem.
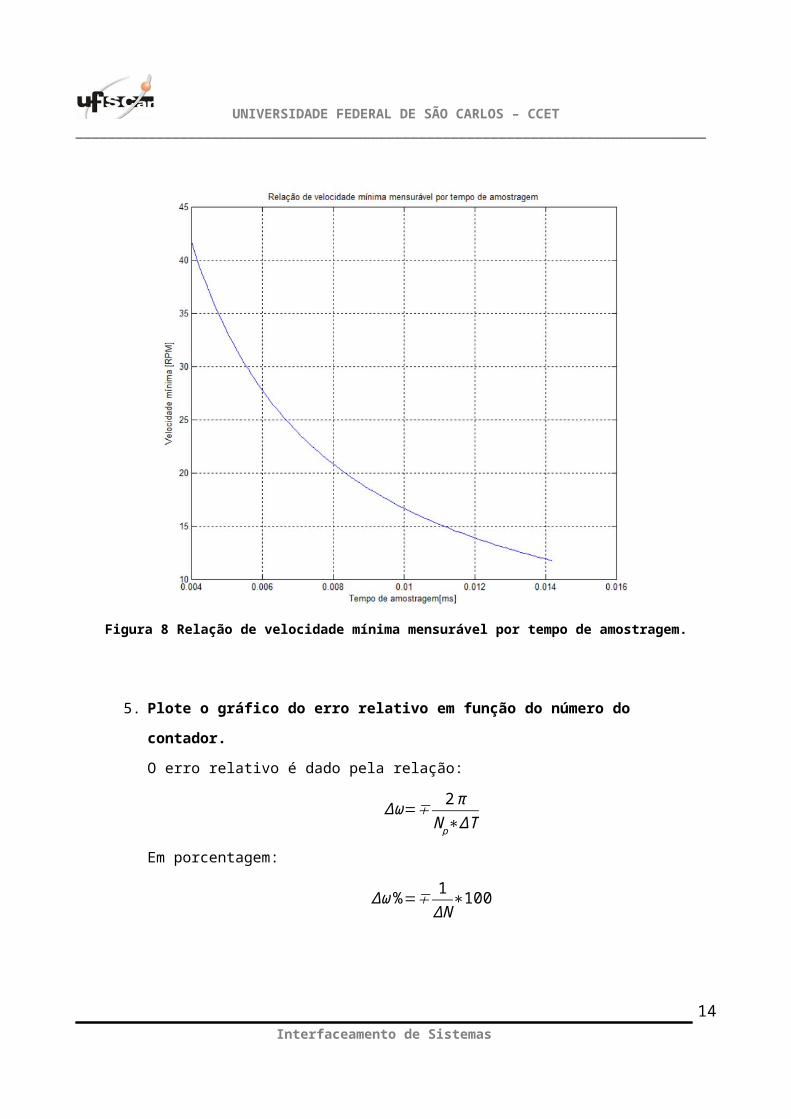
5. Plote o gráfico do erro relativo em função do número do contador.
O erro relativo é dado pela relação:
Δω=∓ 2πN p∗ΔT
Em porcentagem:
Δω%=∓ 1ΔN
∗100
10Interfaceamento de Sistemas

UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
Figura 9 Erro relativo por número do contador.
Para melhor visualização do gráfico o número do contador foi ajustado para mostrar a
parte do gráfico com erro igual ou inferior a 10%.
6. Plote o gráfico do erro relativo em função da velocidade angular do motor DC.
Para tanto, considere 5 valores de tempo de amostragem distintos. Observe que
haverá 5 gráficos distintos que deverão ser plotados na mesma janela.
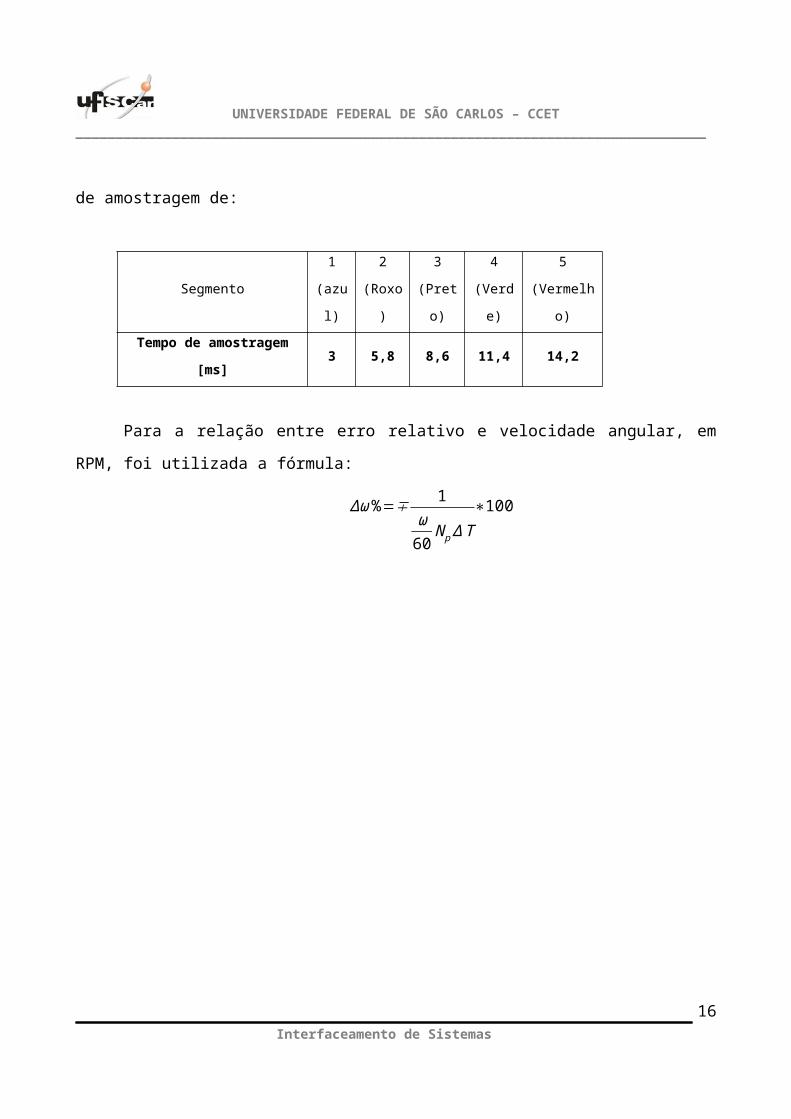
Para plotar o gráfico foram considerados os valores de tempo de amostragem de:
Segmento1
(azul)
2
(Roxo
)
3
(Preto)
4
(Verde)
5
(Vermelho)
11Interfaceamento de Sistemas
UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
Tempo de amostragem [ms] 3 5,8 8,6 11,4 14,2
Para a relação entre erro relativo e velocidade angular, em RPM, foi utilizada a
fórmula:
Δω%=∓ 1ω60
N p∆T∗100
Figura 10 Erro relativo por velocidade angular.
Para um intervalo de 500 a 3000 RPM:
12Interfaceamento de Sistemas
UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
Figura 11 Erro relativo por velocidade angular em um intervalo de 500 a 3000 RPM.
7. Diante das observações dos gráficos anteriores, determine um tempo de
amostragem qualquer que obtenha erros de medição abaixo de 5% em uma faixa
de operação entre 500 a 3000 rpm.
Pela análise dos gráficos anteriores, da figura , para o intervalo de velocidade
angular de 500 a 3000 RPM. Os valores de tempo de amostragem 3, 4 e 5
correspondentes aos valores de 10,2, 12,2 e 14,2 ms. Analisando os dados para um
tempo de amostragem de 6,68 ms em 500 rpm o erro relativo fica em torno de 4,999%,
quase 5%, sendo este tempo o limite inferior do tempo de amostragem para atender a
proposta do item.
13Interfaceamento de Sistemas
UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
Figura 12 Erro relativo por velocidade angular para tempo de amostragem de 6,68 ms
8. Mediante uma análise da planta de controle, determinou-se que o tempo máximo
de amostragem seria de ∆T=5ms para obter o desempenho adequado. Nessas
condições, seria possível obter medições abaixo de 5%, em uma faixa de
operação entre 500 e 3000 RPM? Caso contrário, quais são as medidas possíveis
para solucionar este problema? Considere o tempo de amostragem de 5ms e
trace o gráfico de erro relativo em função da velocidade angular, variando-se
R=1∗R ,2∗Re 4∗R.
Como visto no item anterior o tempo de amostragem mínimo para um erro inferior a
5% é de 6,68 ms. Logo para um tempo de amostragem 5 ms o erro é superior a 5%.
Aumentando a Resolução é possível diminuir o erro relativo, sem precisar alterar o tempo
de amostragem ou o intervalo de medição de velocidade. Na figura abaixo é possível
observar bem este comportamento, alterando a Resolução.
14Interfaceamento de Sistemas
UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
Figura 13 Erro relativo por velocidade angular para tempo de amostragem de 5 ms, alterando a Resolução.
9. Determine analiticamente o valor mínimo de ∆T , de forma que o erro de medição
seja inferior à 5% para R=1∗R ,2∗Re 4∗R no regime de operação de 400 a 3000
RPM.
Para se determinar o limite para um erro de 5% para as resoluções, é considerado,
como visto nos gráficos, que quanto maior a resolução menor o erro relativo e quanto
maior o tempo de amostragem menor o erro relativo. Para este método também o erro
relativo é maior para a velocidade mais baixa, no caso 400 RPM. Logo é o tempo de
amostragem é determinado para que seja inferior a 5% para a velocidade de 400 RPM.
Pela fórmula:
∆T >∓ 1ω60
N p Δω%∗100
É esperado na fórmula que dobrar a resolução diminui o tempo de amostragem pela metade. Fazendo agora por análise gráfica temos na figura abaixo, que é uma aproximação da figura , no intervalor de 350 a 500 RPM, para melhor visualização.
15Interfaceamento de Sistemas
UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
Figura 14 Erro relativo por velocidade angular com resolução de 360 pulsos/rev no intervalo de 350 a 500 RPM.
É possível observar que em 400 RPM, apenas as curvas preta, verde e vermelha estão abaixo de 5% de erro relativo. Assim a curva preta, correspondente ao tempo de amostragem de 8,6 ms, é muito próxima do erro relativo de 5%, assim pode-se considerar que o tempo de amostragem, pela análise do comportamento das curvas do gráfico deve ser superior a 8,4 ms. Assim para 2∗R, o tempo de amostragem deve ser de 4,2 ms e para 4∗R, o tempo de amostragem deve ser de 2,1 ms.
Agora para confirmação pela fórmula, para uma resolução de R=360 pulsos/revolução e velocidade angular de 400 RPM e erro relativo de 5%, temos:
∆T >∓ 140060
∗360∗0,05=8,33ms
Para uma resolução de 2∗R=720 pulsos/revolução e velocidade angular de 400 RPM e erro relativo de 5%, temos:
∆T >∓ 140060
∗720∗0,05=4,17ms
Para uma resolução de 4∗R=1440 pulsos/revolução e velocidade angular de 400 RPM e erro relativo de 5%, temos:
16Interfaceamento de Sistemas

UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
∆T >∓ 140060
∗1440∗0,05=2,08ms
Assim é garantido que para R o tempo de amostragem 8,4 ms, para 2∗R o tempo
de amostragem de 4,2ms e para 4¿ R o tempo de amostragem de 2,1ms garantem que o
erro relativo da medição fique abaixo de 5%.
Exercício 2
Considere um motor de indução trifásico cuja velocidade angular de
operação é de no máximo ω=2000rpm. O encoder acoplado em seu eixo apresenta
uma resolução de R=200 pulsos/revolução. Um contador de 8 bits e sensível a
borda de descida foi conectado a um dos canais do encoder para a aferição de
velocidade.
1. Determine o valor mínimo de ΔT para obter erros de 5% para velocidade entre 200rpm e
2000rpm;
Ωmax=2000rpm
Np=200
V=8bits
Pelo método de medida de frequência:
ω=60∆ NN p∆T
.100%
5= 60200.200 .∆T
.100
∆T= 602000
=0,03 s
2. Determine o valor máximo de ΔT para a leitura de velocidade;
17Interfaceamento de Sistemas

UNIVERSIDADE FEDERAL DE SÃO CARLOS – CCET_______________________________________________________________________________
∆T=60(2v−1)N p .ωmax
=38,25ms
6. CONCLUSÃO
Através do experimento pode-se obter uma melhor clareza sobre o controle do
motor e do encoder, assim como seu funcionamento e sinais dos canais do encoder.
Os experimentos e comportamento do motor ocorreram dentro do esperado.
18Interfaceamento de Sistemas


![Aula 04 e 05 - Dinâmica de Grupo [História, Prática e Vivências]](https://static.fdocumentos.com/doc/165x107/577c82e41a28abe054b2aecc/aula-04-e-05-dinamica-de-grupo-historia-pratica-e-vivencias.jpg)










![Aula 10 Farmacocinética.ppt [Modo de Compatibilidade] · Aula Prática #4 N Turma 1 11/05 Turma 2 18/05 ome Alessandra Figueiredo Ana Laura de Lima Nome Matheus C. de Souza Pedro](https://static.fdocumentos.com/doc/165x107/5beb311e09d3f231188c114b/aula-10-farmacocineticappt-modo-de-compatibilidade-aula-pratica-4-n-turma.jpg)