Regulacao Da Velocidade de Motores C.A

of 17
Transcript of Regulacao Da Velocidade de Motores C.A
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
y Sadraque de Jesus Bartolomeu
3 ANO | ENG.ELECTROMECNICA
1
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
NDICE
SumriosPREFCIO ------------------------------------------------------------------------------------------------4 INTRODUO--------------------------------------------------------------------------------------------5 OBJECTIVO-----------------------------------------------------------------------------------------------6 CAPITULO I y Conjugado (momento) --------------------------------------------------------------------------7 CAPITULO II y Variao de velocidade nos motores de induo --------------------------------------------8 CAPITULO III Regulao da velocidade------------------------------------------------------------------------9 y Atravs da variao do nmero de plos -----------------------------------------------------9 y Atravs da variao da frequncia ------------------------------------------------------------9 y Atravs da variao da variao da tenso---------------------------------------------------11 y Controlo da resistncia rotrica---------------------------------------------------------------13 y Controlo do deslizamento por dispositivos auxiliares--------------------------------------13 CAPITULO IV y Tipos e aplicaes de controlo de velocidade ----------------------------------------------14 CONCLUSO--------------------------------------------------------------------------------------------16 BIBLIOGRAFIA-----------------------------------------------------------------------------------------17
3 ANO | ENG.ELECTROMECNICA
2
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
ndice das figurasFig. 1 Curva Conjugado-Rotao (Copyright 1997, 1998, 1999, 2000 GE-GEVISA S.A.Traduzido e Adaptado da Publicao GEMIS GEZ-6207 por Ney E. T. Merheb (Eng. Aplicao GE-GEVISA). ----------7Fig. 2 Curva de conjugado com variao da resistncia rotrica ( Mquinas Eltricas Geraldo Carvalho Catlogos WEG) --------------------------------------------------------------------- -------------------8
Fig. 3 Motores Dahlander ou com comutao do numero de plos (Mquinas Eltricas Geraldo Carvalho Catlogos WEG)--------------------------------------------------------------------------9 Fig. 4-6 Ajuste contnuo de velocidade e conjugado com relao carga mecnica(Mquinas Eltricas Geraldo Carvalho Catlogos WEG)------------------------------------------------------------10 Fig. 7 Relao tenso-carga (Internet-www.google.com/regulao da velocidade em motores C.A) --------------------------------------------------------------------------------------------------------------12 Fig. 8 Circuto de regulao usando Triac (www. Pdf-search-engine.com/regulao da velocidade dos motores C.A) ---------------------------------------------------------------------------------13 Fig. 9 Sistema de controle de velocidade por controle deslizamento (w.w.w.wegelectric.com/motores C.A) -----------------------------------------------------------------------13 Fig. 10 O diagrama de blocos, um conversor esttico de frequncia (Elaborado no Autocad, pelo grupo). -----------------------------------------------------------------------------------------------------14 Fig. 11 Configurao bsica de um Inversor de Frequncia (RASHID, Muhammad Harunur. Power Electronics Circuits, devices and pplications. 2 ed. Prentice Hall, New Jersey: 1993.)--15
3 ANO | ENG.ELECTROMECNICA
3
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
PREFCIO
O presente trabalho foi elaborado por estudantes do 3 Ano do curso de Eng. Electromecnica. O trabalho tem um carcter avaliativo. Neste trabalho foram abordados temas como os mtodos empregados para regulao da velocidade dos motores elctricos de C.A, procuramos abordar sobre algumas das aplicaes do controle da velocidade dos motores. Esperamos e desejamos que este trabalho seja til e que os leitores achem interessante o seu contedo.
3 ANO | ENG.ELECTROMECNICA
4
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
INTRODUO Os motores de corrente alterna podem ser sncronos ou assncronos, de corrente alternada trifsica ou monofsica. O motor de induo ou assncrono de corrente alternada tem sido o motor preferido da indstria desde o princpio do uso da energia elctrica em corrente alternada. Ele alcanou e manteve sua posio em virtude de sua robustez, simplicidade e baixo custo. Para alm da necessidade objectiva de imprimir ao motor uma dada velocidade, h outra grande vantagem, na regulao contnua da velocidade, que consiste em poupar energia, isto , aumentar o rendimento das instalaes de fora-motriz. As estatsticas provam que cerca de 80% dos motores elctricos em funcionamento, actualmente, accionam bombas centrfugas e ventiladores. O nico mtodo eficaz de poupana de energia passa, necessariamente, pela variao da velocidade da bomba ou do ventilador de modo serem obtidos os caudais necessrios em cada momento. Esta variao pode ser feita de uma forma automtica e contnua. Existem de facto vrios processos de regular a velocidade de mquinas elctricas:y Utilizando dois ou mais conjuntos de enrolamentos estatricos separados, o que permite obter vrias velocidade (uma por cada conjunto de enrolamento ligados a rede) y Atravs da ligao Dahlander que permite ligar, de dois modos diferentes, dois conjuntos de enrolamentos originando duas velocidades diferentes. y Atravs de resistncias adicionais no rotor, variando o deslizamento por modificao da curva binrio-velocidadedo motor, mas mantendo a mesma velocidade de sincronismo. E a tenso aplicada aos enrolamento do motor (por auto transformador, por resistncias estatricas, etc.), o que permite uma regulao contnua da sua velocidade. y Utilizando autmatos programveis e microprocessadores que permitem controlar e regular, de forma contnua, no s a velocidade como outras grandezas do motor (potncia fornecida, factor de potncia rendimento mximo, etc.). y Utilizando conversores esttico de frequncia que, por variao da frequncia aplicada ao motor, produzem uma variao da sua velocidade directamente proporcional. y Uso de controlo electrnico da velocidade dos motores, que para alm da poupana de energia, tem grande vantagem de permitir fazer uma regulao contnua da velocidade.
3 ANO | ENG.ELECTROMECNICA
5
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
OBJECTIVO O presente trabalho tem como objectivo o estudo da variao da velocidade em motores de corrente alternada, visto que bastante importante a limitao do funcionamento de um motor elctrico para se obter um rendimento das instalaes. Para isto estudaremos os mtodos e equipamentos usados para se conseguir a variao da velocidade nestes motores. Mas antes comearemos por falar em conceitos bsicos como o momento ou conjugado dos motores C.A.
3 ANO | ENG.ELECTROMECNICA
6
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
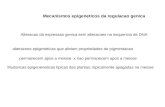
CAPIT L I Conjugado (momento) A caract r tica fundamental de qualquer motor de induo a sua curva de conjugado versus rotao. Os vrios pontos da curva de conjugado -rotao, so definidas pela norma NEMA M como segue:
Fig. 1 Curva Conjugado-Rotao Conjugado Nominal: o conjugado necessrio para produzir a pot ncia nominal rotao nominal. Em li ras-p ele igual a pot ncia em HP vezes 5250 dividido pela rotao nominal em rpm. Em N.m igual a . pot ncia em cv vezes 7022 dividido pela rotao nominal em rpm Conjugado Mximo: o conjugado mximo que o motor ir desenvolver com tenso e frequncia nominal sem queda abrupta na rotao. Conjugado de Partida ou com Rotor Bloqueado: o conjugado mnimo que o motor ir desenvolver em repouso com tenso e frequncia nominal aplicada. Conjugado Mnimo: O conjugado mnimo que o motor ir desenvolver durante o perodo de acelerao do repouso at a rotao em que o conjugado mximo ocorre. Para motores que no possuem um conjugado mximo definido o conjugado mnimo o menor conjugado desenvolvido at a rotao nominal. Mas h que se levar em conta que: O conjugado do motor de induo varia aproximadamente com o quadrado da tenso aplicada aos seus terminais. Baixa resistividade das barras do rotor (resistncia rot rica) resulta em alta rotao nominal (baixo escorregamento) e resulta em alto rendimento. Perdas rot ricas so proporcionais ao escorregamento. Alta resistncia rot rica fornece alto conjugado de partida com baixa corrente de partida, mas resulta em baixo rendimento nominal. O escorregamento no conjugado mximo proporcional a resistncia rot rica. A frequncia e tenso rot rica so proporcionais ao escorregamento; assim, ambas so iguais a zero na rotao sncrona, mas atingem valor mximo na rotao zero.
3 ANO | ENG.ELECTROMECNICA
7
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
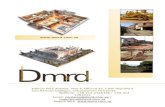
CAPIT L II Variao de velocidade nos motores de induo A relao entre a rotao, a frequncia de alimentao, o nmero de plos e o escorregamento de um motor de induo obedece seguinte equao: n = [(60. f)/p].(1-s) Onde n = velocidade em rpm; F = frequncias Hz; P = nmero de plos; S = Escorregamento Da expresso acima, podemos notar que as rotaes podem ser reguladas, alterando a frequncia da tenso de alimentao, o nmero de plos e o escorregamento. Variao do nmero de plos Este mtodo aplicvel apenas para motores com rtor curto circuitado, porque alteramos apenas o nmero de plos nos enrolamentos do esttor. Existem trs modos de variar o nmero de plos de um motor de induo: Enrolamentos separados no esttor Um enrolamento s, porm com comutao de plos. ( Ligao Dahlander) Combinao dos dois anteriores Variao do escorregamento Para que se faa esta operao necessrio que as instalaes sejamespeciais, por exemplo precisa-se de reguladores de induo, com a variao da tenso variamos tambm o deslizamento. Podemos variar o escorregamento, variando a resistncia do rotor, este mtodo s pode ser aplicado em motores com rotor bobinado. Tem a desvantagens de possuir custo alto e variao pequena.
Fig. 2 Curva de conjugado com variao da resistncia rotrica Regulao atravs de variao de frequncia Este mtodo possvel apenas quando o motor alimentado por instalaes especiais, capazes de alterar a frequncia. Usando de um gerador sncrono cujafrequncia pode ser alterada, ou um conversor de semicondutores comandados. Este actualmente o mtodo mais eficiente para controlar a velocidade dos motores de induo.
3 ANO | ENG.ELECTROMECNICA
8
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
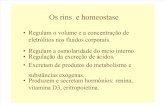
CAPIT L III Regulao da velocidade Atravs da variao do nmero de plos Estes motores constam de um enrolamento especial que permite, segundo o modo de ligao, obter dois valores diferentes de plos, sendo um o dobro do outro (2 e 4 plos, 4 e 8 plos, 6 e 12 plos, etc.) S se podem obter duas velocidades (de baixa rotaoe de alta rotao), uma dupla da outra, como observamos nos motores com ligao Dahlander
Fig. 3 Motores Dahlander ou com comutao do numero de plos Atravs da variao da frequncia Os conversores transformam a tenso da rede, de amplitude e frequncia constantes em uma tenso de amplitude e frequncia variveis. Variando-se a frequncia da tenso de alimentao, varia-se tambm a velocidade do campo girante e consequentemente a velocidade mecnica de rotao da mquina. O torque desenvolvido pelo motor de induo segue a equao: T = K. m.I O fluxo magnetizante, desprezando-se a queda de tenso ocasionada pela resistncia e reactncia dos enrolamentos do esttor vale: m = K . V /f onde: T = torque disponvel na ponta do eixo (N.m) m = fluxo de magnetizao (Wb) I = corrente rotrica(A) ( depende da carga)
3 ANO | ENG.ELECTROMECNICA
9
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
V = tenso de alimentao (V) K e K : constantes (dependem do projecto do motor) Admitindo-se que a corrente depende da c arga e que essa constante, (portanto corrente praticamente constante) percebe-se que variando proporcionalmente a amplitude e a frequncia da tenso de alimentao, o fluxo e consequentemente o torque, permanecem constantes. O motor fornece assim um ajuste contnuo de velocidade e conjugado com relao carga mecnica assim que obtemos as seguintes curvas: Fig.4 Curva Tenso Frequncia
Fig. 5 Curva Torque Frequncia
Fig. 6 Curva Potncia Frequncia
Benefcios dos Conversores de Frequncia y Controle a distncia e Reduo de custos y Aumento de produtividade y Eficincia Energtica y Versatilidade y Maior qualidade no produto final3 ANO | ENG.ELECTROMECNICA
10
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
Atravs da variao da tenso O binrio electromecnico desenvolvido por um motor de induo proporcional ao quadrado da tenso aplicada ao esttor. Esta caracterstica proporciona algum controlo da velocidade, embora de forma precria, principalmente face a variaes na carga. Ao utilizar motores elctricos que funcionam com tenso alternada, no raro deparar-se com a necessidade de regular a sua velocidade, especialmente em determinadas aplicaes como no caso de bombas para lquidos, aparelhos para testes mecnicos, secadores de cabelo, ou berbequins. Se, por exemplo possuir um berbequim de velocidade fixa, pode ser necessrio variar a sua velocidade, para usar diversas brocas. Na realidade, uma de 10 mm no deve girar mesma velocidade que uma de 2 mm, porque cada uma requer uma velocidade especfica. Uma ponta muito fina, por exemplo, de 2 mm de dimetro, deve girar a um regime elevado, como 4000 rpm, o que uma broca de 10 mm suportaria durante muito pouco tempo. Existem muitas aplicaes nas quais pode ser necessrio variar a velocidade dum motor elctrico de corrente alternada. Para resolver este problema, pode-se recorrer normalmente a duas solues: ou se varia a amplitude da tenso alternada com a qual se alimenta o motor, ou se controla o motor com impulsos de tenso, de comprimento varivel. Neste ltimo caso pode dizer-se que se varia o valor mdio da tenso de alimentao. Variar a amplitude da tenso de alimentao , indubitavelmente, um mtodo vlido, mas para tal seria necessrio um gerador de tenso com amplitude varivel. Um sistema para variar a tenso dum motor consiste em dispor em srie uma resistncia varivel de grande potncia. de notar que, em vazio, um motor tem um certo consumo de corrente, enquanto que se for submetido a esforo, a corrente aumenta de forma imprevisvel. O motor sob esforo temos que com um determinado valor de resistncia em srie com o motor em vazio, se tiver uma determinada tenso, sob esforo esta tenso cai sensivelmente, porque aumenta a necessidade de corrente por parte do motor. Como a queda de tenso na resistncia funo da corrente que a atravessa, se for imposta uma determinada velocidade e se se travar o eixo do motor, aumenta a corrente requerida e decresce a tenso de alimentao. Portanto, a velocidade no se pode manter como em vazio, reduzindo-se sensivelmente. Por esta dificuldade prefervel abandonar a ideia da variao da amplitude da tenso, para aproveitar outra alternativa que consiste em regular o comprimento dos impulsos de tenso com os quais se alimenta o motor.
3 ANO | ENG.ELECTROMECNICA
11
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
Suponhamos que se tem de alimentar um motor que funciona com 230V alternados. Com a alimentao de onda completa (normal), o motor gira velocidade mxima; porm, se se cortar meia onda, por exemplo, ligando um diodo em srie com o m otor, o seu eixo girar mais lentamente. De facto, agora acontecer que o motor ser alimentado com uma tenso cujo valor se dividiu e, portanto, poder dispor de metade da potncia em relao ao caso da alimentao com onda completa. No entanto, para variar o valor mdio da tenso de alimentao, suficiente fazer preceder o motor em questo, por um circuito electrnico que fornece cada meia onda, em retardo em relao passagem pelo zero. Trata-se, praticamente, de um interruptor que se fecha e se ab com cada meia onda da re tenso alternada, mas que o faz tambm com um certo retardo em relao ao instante em que se inicia a referida meia onda. O sistema mais simples para variar a velocidade de rotao dum motor elctrico, ou a luminosidade duma lmpada, consiste em variar a tenso que o alimenta. Como no simples variar a amplitude, recorre-se a simples circuitos que permitem variar a energia e com isso a potncia entregue carga. Aproveitando adequadamente os interruptores controlados, no nosso c so um triac, pode-se a intervir de modo que a tenso alimente as cargas com maior ou menor retardo. Falamos, logicamente, duma tenso sinusoidal ou rectangular. A forma segundo a qual varia o valor mdio da sinuside pode compreenderse facilmente, considerando a zona entre o eixo horizontal e a sinuside como o mximo valor de energia proporcionada carga.
Variando o ngulo de conduo de um triac, consegue-se modificar a potncia aplicada carga.
Fig. 7 Relao tenso-carga A zona de traos representa a parte da tenso que no chega carga; quanto maior for, menor ser a superfcie encerrada na sinuside correspondente carga. Para conseguir que a tenso da rede chegue carga com retardo em relao passagem pelo zero, controla-se a prpria carga com um triac cuja porta est ligada sada de um divisor de tenso.
3 ANO | ENG.ELECTROMECNICA
12
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
Variando a impedncia do divisor, muda o tempo necessrio para que a sinuside possa alcanar o valor suficiente para excitar a porta e, portanto, para que o triac conduza.
Esquema elctrico do circuito. Um potencimetro permite variar a velocidade de rotao do motor simplesmente controlando o ngulo de conduo dum triac.
Fig. 8 Circuto de regulao usando Triac Controlo da resistncia rotrica Esta possibilidade existe somente para os motores de rotor bobin ado, tal como j foi referido. A variao da resistncia rotrica faz variar o binrio e, tal como no item anterior, consequentemente a velocidade, embora em funo da carga. Controlo do deslizamento por dispositivos auxiliares Este mtodo de controlo tambm apenas v lido para motores de rotor bobinado e insere tenses ajustveis frequncia de deslizamento nos circuitos rotricos atrav de dispositivos s auxiliares. So usados dois tipos de dispositivos, representados na figura abaixo, o primeiro um conversor de frequncia que extrai energia dos circuitos rotricos e a devolve rede sob a forma de energia elctrica. O segundo converte essa energia em energia mecnica que coloca tamb no m veio. Em qualquer dos casos o princpio pode ser compreendido se pensar que no controlo reosttico essa energia seria desperdiada sob a forma de calor. Assim obtm-se um sistema mais eficiente.
Fig. 9 Sistema de controle de velocidade por controle deslizamento CF- conversor de freqncia ; RT- referncia ao rtor
3 ANO | ENG.ELECTROMECNICA
13
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
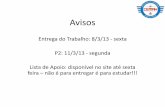
CAPITULO IV Ti os e apli aes de controlo de velocidade Controle Escalar impe ao motor uma determinada relao tenso/frequncia, ou seja o motor trabalha com fluxo constante. aplicado quando no h necessidade de respostas rpidas s variaes de torque ou velocidade, sendo particularmente interessante quando alimenta diversos motores. O controle realizado em malha aberta e a preciso da velocidade depende do escorregamento do motor. O controle escalar o mais utilizado, devido sua simplicidade e devido ao fato de que a grande maioria das aplicaes no requer alta preciso e/ou rapidez nas respostas da velocidade. Controle Vectorial possibilita atingir um elevado grau de preciso e rapidez no controle do torque e da velocidade do motor. O controle decompe a corrente do motor em dois vectores: um que produz o fluxo magnetizante e outro que produz o torque, regulando separadamente o torque e o fluxo. Pode ser realizado em malha aberta (sensorless) ou em malha fechada (com realimentao) Com sensor de velocidade requer a instalao de um sensor, p/ex. encoderincremental no motor. Alcana a maior preciso possvel no controle de velocidade e do torque, inclusive com velocidade zero. Sensores mais simples que o anterior, porm apresenta limitaes de torque em baixssimas rotaes. Em velocidades maiores to bom quanto. o controle com realimentao . Visto que o binrio motor depende da tenso aplicada e da frequncia, ento o conversor regula simultaneamente a frequncia e a tenso aplicada, numa relao constante, de forma que binrio motor se mantenha aproximadamente constante.
REDE DE ALIMENTAO
C.A
ponte rectificadora de dodos
C.C
circuito intermdio de corrente contnua
ondulador
C.A
M 3
velocidade de referncia
REGULADOR
Fig. 10 O diagrama de blocos, um conversor esttico de frequncia.
3 ANO | ENG.ELECTROMECNICA
14
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
Configurao bsica de um inversor de frequncia
Fig. 11 Configurao bsica de um Inversor de Frequncia Circuito de entrada (ponte rectificadora no controlada) Circuito de pr-carga (resistor, contactor ou rel) Circuito intermedirio (banco de capacitores Buss DC, resistores de equalizao) Circuito de Sada "inversor" (ponte trifsica de IGBT) Placa de controlo (microprocessada) Placa de driver's (disparo dos IGBT, fontes de alimentao, etc.) Rguas de bornes de interligao (controle de potncia) Mdulo de frenagem (interno ou externo)
3 ANO | ENG.ELECTROMECNICA
15
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
CONCLUSO Com este trabalho aprendemos que os motores de corrente alternada tm muitas aplicaes na indstria e que para se obter o requerido estes motores na indstria necessrio que se faa a regulao da sua velocidade. H vrios factores que influenciam na variao da velocidade dos motores elctricos de corrente alternada como a sua frequncia, o nmero de plos, o escorregamento, etc. Tambm de acordo com a sua utilizao se faz o uso de um ou de outro tipo ou mtodo de variao da velocidade do motor elctrico, i.e., existem mtodos que so muito complexos e exigem instalaes especiais e tambm h casos em que o emprego de um determinado mtodo pode ser muito caro.
3 ANO | ENG.ELECTROMECNICA
16
REGULAO DA VELOCIDADE DE MOTORES DE C.A
UNIPIAGET
BIBLIOGRAFIA 1. Internet y www. Pdf-search-engine.com/regulao da velocidade dos motores C.A y hppt//google.co.ao/livros-electricidade y hppt//google.co.ao/livros-mquinas elctricas 2. Livros y Fascculo de Mquinas electricas- Dr. Tanev y Livros de iniciao a operao de centrais hidroelctricas do CFPQE y Automao industrial J. Norberto Pires 3 edio actualizada e aumentada.
3 ANO | ENG.ELECTROMECNICA
17