Projeto Integrado de Negócios Monitoramento de mídias sociais
Upload
diego-yanezCategory
view
363download
19
FACULDADE DE TECNOLOGIA SÃO
FRANCISCO
JACAREÍ - SP
SISTEMA INTEGRADO DE MONITORAMENTO DE SISTEMAS DE ENERGIA DE EMERGÊNCIA
Diego Yañez dos Santos
Trabalho de Conclusão de Curso
FACULDADE DE TECNOLOGIA
SÃO FRANCISCO – FATESF
Curso de Engenharia de Controle e Automação
SISTEMA INTEGRADO DE MONITORAMENTO DE SISTEMAS DE ENERGIA DE EMERGÊNCIA
Autor: Diego Yañez dos Santos
Orientador: Prof. José Bianchi Neto
Jacareí – Dezembro / 2012
Trabalho de Conclusão de Curso
FACULDADE DE TECNOLOGIA
SÃO FRANCISCO – FATESF
GRADUAÇÃO EM ENGENHARIA DE CONTROLE E
AUTOMAÇÃO
CERTIFICADO DE APROVAÇÃO
Título: SISTEMA INTEGRADO DE MONITORAMENTO DE SISTEMAS DE ENERGIA DE EMERGÊNCIA
Aluno: Diego Yañez dos Santos
MEMBROS DA BANCA EXAMINADORA
__________________________________
Prof.
___________________________________
Prof.
Orientador: Prof. José Bianchi Neto
Jacareí, de Dezembro de 2012
Agradecimentos
Primeiramente a Deus, pois sem Ele, nada seria possível.
Ao meu orientador, Prof. José Bianchi Neto, pelos ensinamentos, conselhos,
sugestões e pela confiança depositada para o desenvolvimento deste trabalho.
Aos meus pais, irmãos e namorada pela paciência, carinho e incentivo nos
momentos difíceis.
À Faculdade de Tecnologia São Francisco – FATESF, por conceder seus
laboratórios, ferramentas e instrumentos para a concretização deste trabalho.
Ao Destacamento de Proteção do Espaço Aéreo de Marte e todos os líderes que de
alguma forma contribuíram e me apoiaram para que esse trabalho pudesse se
concretizar.
E a todos aqueles que de uma forma ou outra contribuíram e me incentivaram para o
desenvolvimento desse trabalho.
RESUMO
SISTEMA INTEGRADO DE MONITORAMENTO DE SISTEMAS DE ENERGIA DE EMERGÊNCIA
Os sistemas de energia de emergência se tornaram fundamentais em nosso
cotidiano, pois eles garantem a confiabilidade e a qualidade necessária a quaisquer
serviços, especialmente aqueles ditos essenciais, que tem se desenvolvido a cada
dia.
Com o sistema integrado de monitoramento de sistemas de energia de
emergência, empresas e instituições poderão gerenciar remotamente através da
internet ou intranet os parâmetros básicos, garantindo a confiabilidade e segurança
para o perfeito funcionamento dos seus grupos geradores e fontes ininterruptas de
energia, tornando-se uma excelente ferramenta de apoio para a execução da
manutenção preventiva e corretiva nestes sistemas.
Palavras-chave: Monitoramento remoto. Grupo geradores. Fontes ininterruptas de
energia. Manutenção preventiva.

ABSTRACT
INTEGRATED SYSTEM MONITORING OF EMERGENCY POWER SYSTEMS
The emergency power systems have become essential in our daily life,
because they ensure the reliability and quality required any services, especially those
so-called essential, which has developed every day.
With the integrated monitoring of emergency power systems, companies and
institutions can manage remotely over the internet or intranet basic parameters
ensuring the reliability and security for the perfect functioning of their generators and
uninterruptible power sources, becoming an excellent tool to support the
implementation of preventive and corrective maintenance on these systems.
Keywords: Remote monitoring. Group generators. Sources Uninterrupted Power.
Preventive maintenance.
Lista de figuras
Figura 1 - Gráfico referente ao consumo e oferta de energia de 2003-2012.............16
Figura 2 - Diagrama de blocos do protótipo...............................................................18
Figura 3 - Motor Diesel CUMMINS modelo 6CT8.3 visto em corte...........................20
Figura 4 - Funcionamento do UPS do tipo “On-line”..................................................22
Figura 5 - Funcionamento do UPS do tipo “line-interactive”......................................22
Figura 6 - Funcionamento do UPS do tipo “Standby”................................................23
Figura 7 - Arquitetura Von Neumann e Harvard.........................................................24
Figura 8 - Transformador de corrente........................................................................29
Figura 9 - Circuito Shunt............................................................................................29
Figura 10 - Bobina de Rogowski................................................................................30
Figura 11 - Principio físico do sensor de efeito Hall...................................................31
Figura 12 - Transformador de medida.......................................................................32
Figura 13 - Circuito básico de um divisor de tensão..................................................32
Figura 14 - Emissão e recepção de um pulso emitido por um sensor ultrassônico...33
Figura 15 - Faixa espectral do comprimento de onda de luz visível..........................34
Figura 16 - Sistema por barreira................................................................................35
Figura 17 - Sistema por difusão.................................................................................36
Figura 18 - Sistema por reflexão................................................................................36
Figura 19 - Infraestrutura de um sistema de monitoramento pela internet................37
Figura 20 - Arduino Shield Internet............................................................................38
Figura 21 - Placa Arduíno uno com indicação do número de portas.........................40
Figura 22 - Sensor de temperatura LM-35.................................................................42
Figura 23 - Montagem do sensor LM 35....................................................................42
Figura 24 - Layout da PCI do sensor de Temperatura e a Placa concluída...............44
Figura 25 - Sensor de tensão DC..............................................................................44
Figura 26 - Layout da PCI do sensor de Tensão DC e a Placa concluída.................45
Figura 27 - Resistor shunt de 0.10 Ω com 5 W de potência......................................46
Figura 28 - Sensor de corrente DC............................................................................46
Figura 29 - Layout da PCI do sensor de Tensão DC e a Placa concluída.................47
Figura 30 - Sensor de porta aberta............................................................................48
Figura 31 - Layout da PCI do sensor de Tensão DC e a Placa concluída.................49
Figura 32 - Sensor de tensão AC...............................................................................50
Figura 33 - Layout da PCI do sensor de Tensão AC e a Placa concluída..................51
Figura 34 - Sensor de corrente ACS712-30...............................................................52
Figura 35 - Diagrama de pinagem e aplicações típicas.............................................53
Figura 36 - Sensor de Corrente AC...........................................................................53
Figura 37 - Fototransistor e LED emissor..................................................................54
Figura 38 - Sensor de RPM.......................................................................................54
Figura 39 - Layout da PCI do sensor de RPM e a Placa concluída...........................55
Figura 40 - Sensor ultrassônico HC-SR04 da Iteadstudio.........................................55
Figura 41 - Reservatório utilizado no protótipo..........................................................57
Figura 42 - Sensor ultrassônico.................................................................................57
Figura 43 - Sensor de chama da Rfrobot...................................................................58
Figura 44 - Curva espectral do sensor de chama......................................................59
Figura 45 - Sensor de chama....................................................................................60
Figura 46 - Estrutura básica do programa do protótipo.............................................61
Figura 47 - Declaração dos dados para inicialização da comunicação.....................62
Figura 48 - Interface gráfica para acesso pela internet ou rede interna....................62
Figura 49 - Tela do serial monitor do IDE Arduíno 1.0.1............................................63
Figura 50 - Tela do serial monitor do IDE Arduíno 1.0.1............................................64
Figura 51 - Tela do serial monitor do IDE Arduíno 1.0.1............................................65
Figura 52 - Tela do serial monitor do IDE Arduíno 1.0.1............................................65
Figura 53 - Tela do serial monitor do IDE Arduíno 1.0.1............................................66
Figura 54 - Tela do serial monitor do IDE Arduíno 1.0.1............................................67
Figura 55 - Tela do serial monitor do IDE Arduíno 1.0.1............................................67
Figura 56 - Tela do serial monitor do IDE Arduíno 1.0.1............................................68
Lista de gráficos
Gráfico 1 - Teste de Precisão do Sensor de Temperatura.........................................74
Gráfico 2 - Teste de Precisão do Sensor de Tensão DC............................................74
Gráfico 3 - Teste de Precisão do Sensor de Corrente DC.........................................75
Gráfico 4 - Teste de Precisão do Sensor de Tensão AC............................................75
Gráfico 5 - Teste de Precisão do Sensor de Corente AC...........................................76
Gráfico 6 - Teste de Precisão do Sensor de RPM.....................................................76
Gráfico 7 - Teste de Precisão do Sensor de nível de Combustível............................77
Lista de tabelas
Tabela 1 - Tabela de dimensionamento de portas do microcontrolador.....................41
Tabela 2 - Valores encontrados com as medições e o percentual do erro relativo....70
Tabela 3 - Valores encontrados com as medições e o percentual do erro relativo....70
Tabela 4 - Valores encontrados com as medições e o percentual do erro relativo....71
Tabela 5 - Valores encontrados com as medições e o percentual do erro relativo....71
Tabela 6 - Valores encontrados com as medições e o percentual do erro relativo....72
Tabela 7 - Valores encontrados com as medições e o percentual do erro relativo....73
Tabela 8 - Valores encontrados com as medições e o percentual do erro relativo....73

Lista de Abreviaturas e Siglas
AC Corrente Alternada (Alternating Current)
ADC Conversor Analógico Digital (Analog to Digital Converter)
CISC Computador com um Conjunto Complexo de Instruções
CPU Unidade Central de Processamento (Central Processing Unit)
DC Corrente Contínua (Direct Current)
DPS Processadores Digitais de Sinais
EEPROM Electrically-Erasable Programmable Read-Only Memory
FATESF Faculdade de Tecnologia São Francisco
HTML Linguagem de Marcação de Hipertexto (HyperText Markup Language)
I/O Entrada e Saída (Input and Output)
IP Protocolo de Interconexão (Internet Protocol)
IR Infravermelho (Infrared)
KF Casa de Força
LAN Rede Local (Local Area Network)
LED Diodo Emissor de Luz (Light Emission Diode)
MCI Motor de Combustão Interna
PCI Placa de Circuito Impresso
QEE Qualidade da Energia Elétrica
RAM Memória de Acesso Aleatório (Random Access Memory)
RISC Computador com um Conjunto Reduzido de Instruções
RPM Rotações Por Minuto
TC Transformador de Corrente
TCP Protocolo de Controle de Transmissão (Transmission Control Protocol)
ULA Unidade Lógica Aritmética
UPS Fonte Ininterrupta de Energia (Uninterruptible Power Supply)
USB Universal Serial Bus
WAN Rede Geograficamente distribuída (Wide Area Network)

SUMÁRIO
1 INTRODUÇÃO.......................................................................................................15
1.1 Apresentação do Problema...........................................................................16
1.2 Objetivo do Trabalho......................................................................................17
1.3 Estrutura do Trabalho....................................................................................18
2 FUNDAMENTOS TEÓRICOS...............................................................................19
2.1 Definição de um sistema de energia emergencial......................................19
2.1.1 Grupos Geradores.....................................................................................19
2.1.2 Componentes e sistemas do MCI..............................................................20
2.2 Fonte Ininterrupta de Energia.......................................................................21
2.2.1 UPS do tipo “ON-LINE”..............................................................................21
2.2.2 UPS do tipo “LINE-INTERACTIVE”...........................................................22
2.2.3 UPS do tipo “PASSIVE STAND-BY”..........................................................23
2.3 Microcontroladores........................................................................................23
2.3.1 Arquiteturas dos microcontroladores.........................................................24
2.3.2 Principais componentes de um microcontrolador......................................25
2.3.2.1 Unidade de memória..............................................................................25
2.3.2.2 Unidade Lógica Aritmética (ULA)............................................................26
2.3.2.3 Temporizadores e contadores.................................................................26
2.3.2.4 Interfaces de entrada e saída (I/O).........................................................26
2.3.2.5 Conversor Analógico-Digital (ADC)........................................................26
2.3.2.6 Interrupções............................................................................................27
2.4 Sensores.........................................................................................................27
2.4.1 Tipos de Sensores.....................................................................................28
2.4.2 Sensores de Corrente................................................................................28
2.4.3 Sensor de Tensão......................................................................................31
2.4.4 Sensores Ultrassônicos.............................................................................33
2.4.5 Sensores Ópticos......................................................................................34
2.5 Internet Embarcada........................................................................................36

3 PROJETO E IMPLEMENTAÇÃO...........................................................................39
3.1 Visão geral do projeto....................................................................................39
3.2 Dimensionamento do microcontrolador......................................................39
3.3 Sensores para monitoramento do UPS........................................................41
3.3.1 Sensor de Temperatura.............................................................................41
3.3.2 Sensor de Tensão DC................................................................................44
3.3.3 Sensor de Corrente DC.............................................................................45
3.3.4 Sensor de Porta Aberta.............................................................................47
3.4 Sensores para monitoramento do grupo gerador.......................................49
3.4.1 Sensor de Tensão AC................................................................................49
3.4.2 Sensor de Corrente AC..............................................................................51
3.4.3 Sensor de RPM.........................................................................................53
3.4.4 Sensor de Nível de Combustível...............................................................55
3.4.5 Sensor de Chama......................................................................................58
3.5 Implementação do Software..........................................................................60
3.5.1 Software Base...........................................................................................60
3.5.2 Software Visual..........................................................................................62
4 TESTES E RESULTADOS EXPERIMENTAIS.......................................................63
4.1 Teste de funcionalidade dos sensores.........................................................63
4.1.1 Sensor de Temperatura.............................................................................63
4.1.2 Sensor de Tensão DC................................................................................64
4.1.3 Sensor de Corrente DC.............................................................................64
4.1.4 Sensor de Porta aberta..............................................................................65
4.1.5 Sensor de Tensão AC................................................................................66
4.1.6 Sensor de Corrente AC..............................................................................66
4.1.7 Sensor de RPM.........................................................................................67
4.1.8 Sensor de Nível.........................................................................................68
4.2 Teste de precisão dos sensores...................................................................68
4.2.1 Sensor de Temperatura.............................................................................69
4.2.2 Sensor de Tensão DC................................................................................70
4.2.3 Sensor de Corrente DC.............................................................................70
4.2.4 Sensor de Tensão AC................................................................................71
4.2.5 Sensor de Corrente AC..............................................................................72
4.2.6 Sensor de RPM.........................................................................................72
4.2.7 Sensor de Nível de combustível................................................................73
4.3 Gráficos do teste de precisão.......................................................................74
5 CONCLUSÃO.........................................................................................................78
5.1 Melhorias e propostas futuras......................................................................78
6 REFERÊNCIA BIBLIOGRÁFICA...........................................................................80
7 APÊNDICES...........................................................................................................83
7.1 Apêndice A......................................................................................................83
7.2 Apêndice B......................................................................................................84
8 ANEXOS.................................................................................................................91
8.1 Anexo A...........................................................................................................91
8.2 Anexo B...........................................................................................................96
8.3 Anexo C............................................................................................................98

1 INTRODUÇÃO
Problemas de Qualidade de Energia Elétrica - QEE ou interrupções nos
serviços de fornecimento se tornaram situações comuns cotidianamente e tem
afetado processos industriais inteiros, resultando em grandes prejuízos econômicos.
Uma das principais invenções do século passado, a energia elétrica, tornou-
se essencial para o funcionamento de qualquer aparelho eletrônico e com os
avanços tecnológicos, surgiram os “sistemas sem interrupção”, aqueles que não
podem ser interrompidos em nenhum momento, como por exemplo, equipamentos
de hospitais, bancos e aeroportos, pois o não funcionamento destes equipamentos
pode causar sérias consequências. Um estudo realizado sobre falhas em sistemas
de operação crítica mostra que aproximadamente 60% das interrupções das
operações são provocadas por algum problema relacionado ao fornecimento ou à
infraestrutura de energia elétrica, como por exemplo: falta de energia, blecautes,
falhas em transformadores e falhas em chaves de transferência automática (PAULO
MARIN, 2009).
Com o crescente consumo de energia elétrica pelas empresas e até mesmo
pela população, companhias do setor energético não têm suprido a demanda em
determinadas regiões e buscam incansavelmente desenvolver novas tecnologias
capazes de mitigar possíveis consequências que possam ocorrer no futuro com o
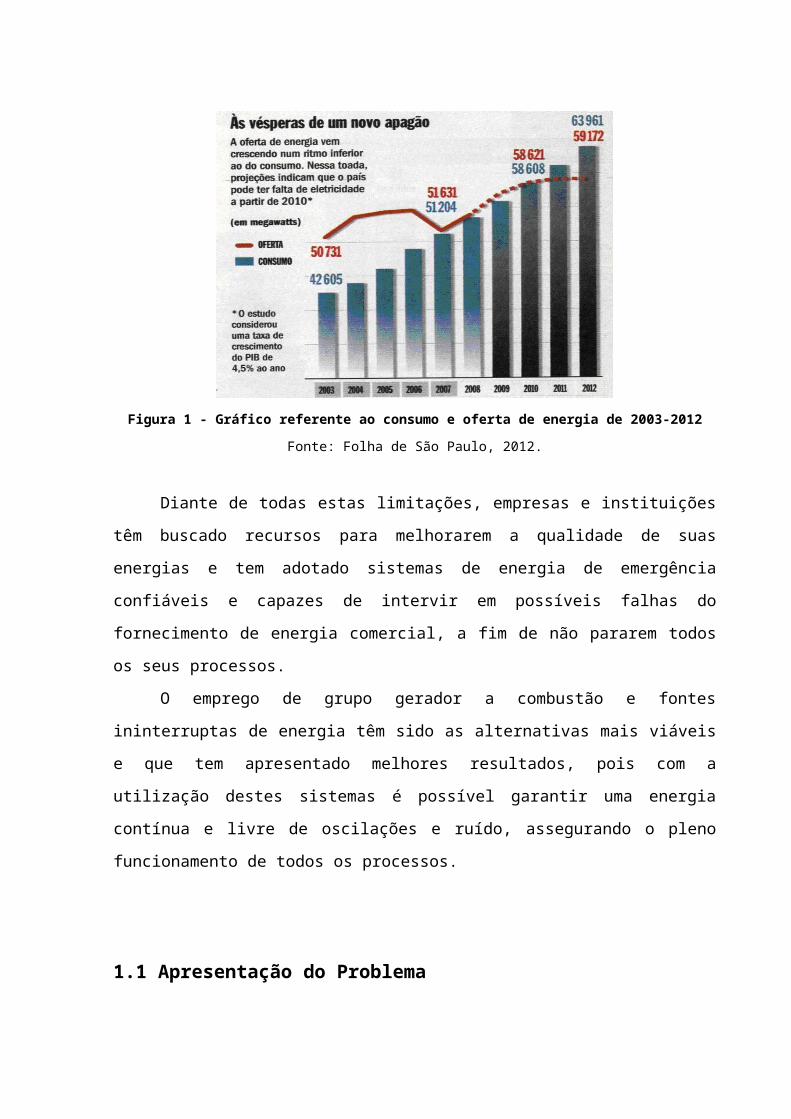
fornecimento da energia elétrica no país. A figura 1 ilustra a oferta e demanda de
energia elétrica no período de 2003 a 2012 no Brasil.

Figura 1 - Gráfico referente ao consumo e oferta de energia de 2003-2012
Fonte: Folha de São Paulo, 2012.
Diante de todas estas limitações, empresas e instituições têm buscado
recursos para melhorarem a qualidade de suas energias e tem adotado sistemas de
energia de emergência confiáveis e capazes de intervir em possíveis falhas do
fornecimento de energia comercial, a fim de não pararem todos os seus processos.
O emprego de grupo gerador a combustão e fontes ininterruptas de energia
têm sido as alternativas mais viáveis e que tem apresentado melhores resultados,
pois com a utilização destes sistemas é possível garantir uma energia contínua e
livre de oscilações e ruído, assegurando o pleno funcionamento de todos os
processos.
1.1 Apresentação do Problema
Até mesmo lugares equipados com sistemas de energia de emergência não
estão isentos de apresentarem falhas ou até mesmo interrupções em seus
processos, sejam eles por falta de um sistema de contingência ou simplesmente por
não possuírem um plano de manutenção preventiva eficaz.
A ideia da criação deste protótipo foi concebida com uma situação real
ocorrida no meu local de trabalho. O aeroporto campo de marte, localizado na zona
norte de São Paulo e o 5º maior aeroporto em movimentos de aeronaves do país
(INFRAERO, 2012), no mês de agosto do ano de 2011 teve suas atividades
interrompidas devido a falhas em seu sistema de energia de emergência.
A situação ocorreu devido a uma série de falhas. Após a interrupção da
energia comercial, o grupo gerador falhou em suas tentativas de partida, e todo
sistema ficou sendo alimentado através do UPS. Durante este tempo, nenhum
técnico foi acionado e a autonomia das baterias do UPS cessou o que fez desligar
todos os equipamentos da torre de controle, inviabilizando as operações por
aproximadamente 2 horas, até o restabelecimento da situação.
Se o aeroporto fosse provido de um sistema de monitoramento remoto do
grupo gerador e do UPS, certamente os responsáveis pela manutenção
conseguiriam intervir com rapidez e eficiência, minimizando ou até mesmo
eliminando todas as consequências que ocorridas neste dia.
1.2 Objetivo do Trabalho
A ideia de desenvolver este protótipo é fazer com que sistemas de energia de
emergência de diferentes lugares, possam ser monitorados remotamente através de
uma rede local de computadores (LAN) ou pela rede mundial de computadores
(WAN), conhecida por internet, na qual um sistema composto por elementos
sensores, um microcontrolador e uma interface ethernet transmitirão as informações
para os responsáveis através da rede, propiciando maior segurança na operação,
rapidez na resolução de possíveis problemas, redução de gastos com mão de obra e
consequentemente uma melhor qualidade e confiabilidade no processo de
manutenção.
Com a implantação deste sistema, os responsáveis pela manutenção poderão
facilmente ficar informados sobre quaisquer ocorrências no sistema e em qualquer
hora e local poderão monitorar os parâmetros básicos do UPS, tais como
temperatura local, tensão e corrente das baterias e potência consumida, e os
parâmetros do grupo gerador, tais como tensão e corrente, potência gerada, número
de rotações, frequência do gerador e nível de combustível, além de possuir um
sistema de detecção de fogo e de porta aberta, tudo isso visando à garantia do
correto funcionamento do sistema e das operações. Outra vantagem seria que uma
vez descoberta à causa de um problema, as informações fornecidas pelo sistema
agilizariam a preparação dos materiais e a mobilização de uma equipe para a
manutenção corretiva dos equipamentos.
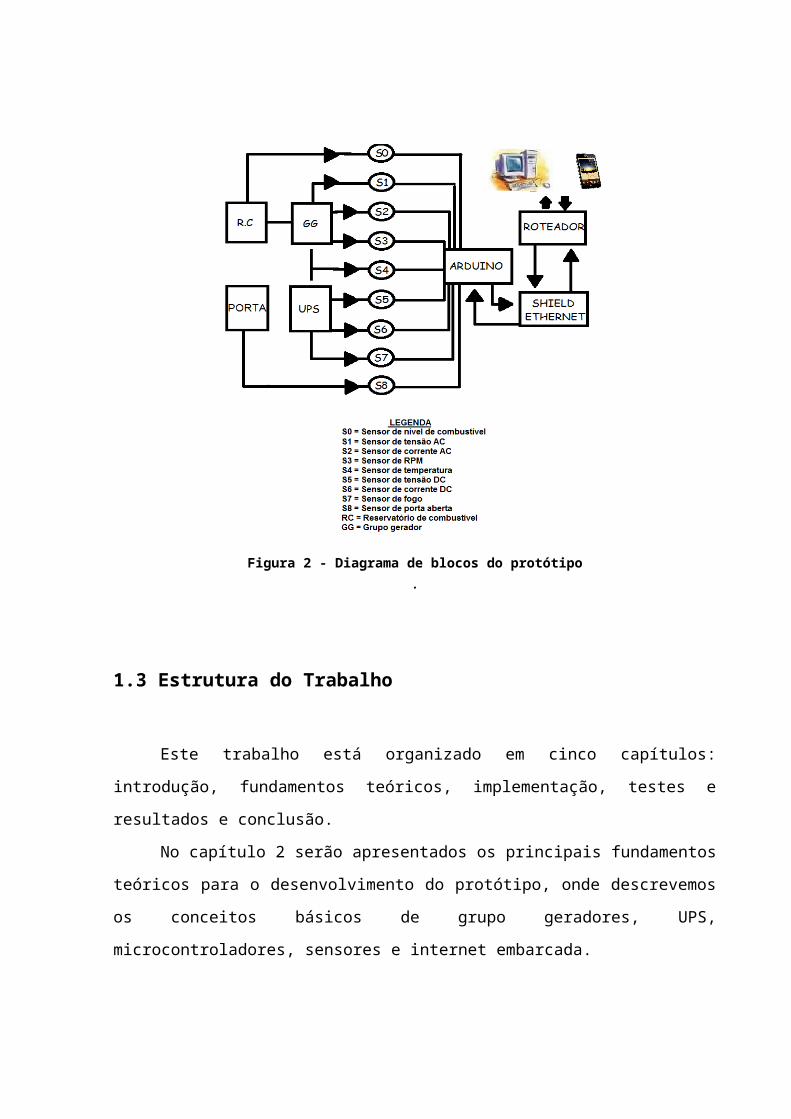
A figura 2 ilustra em diagramas de bloco como será o principio de
funcionamento do protótipo.
Figura 2 - Diagrama de blocos do protótipo
.
1.3 Estrutura do Trabalho
Este trabalho está organizado em cinco capítulos: introdução, fundamentos
teóricos, implementação, testes e resultados e conclusão.
No capítulo 2 serão apresentados os principais fundamentos teóricos para o
desenvolvimento do protótipo, onde descrevemos os conceitos básicos de grupo
geradores, UPS, microcontroladores, sensores e internet embarcada.
No capitulo 3 serão descritos todas as etapas de implementação de hardware
e software, incluindo passo a passo dos dimensionamentos e montagens de cada
um módulos sensores, no capítulo 4 serão apresentados os resultados dos testes de
funcionalidade e de precisão e, no capítulo 5, a conclusão e as propostas e
melhorias futuras que serão estudadas para a complementação futura deste
trabalho.
2 FUNDAMENTOS TEÓRICOS
Este capítulo tem como objetivo apresentar os fundamentos teóricos das
tecnologias utilizadas no processo de desenvolvimento do protótipo.
2.1 Definição de um sistema de energia emergencial
Todos os sistemas de energia emergenciais devem conter elementos que
garantam a continuidade e qualidade da alimentação das cargas selecionadas para
funcionar ininterruptamente. Esses elementos são basicamente os grupos geradores
a combustão (a Diesel, em sua maioria), juntamente com as fontes ininterruptas de
energia, descritas pelo acrônimo UPS.
2.1.1 Grupos Geradores
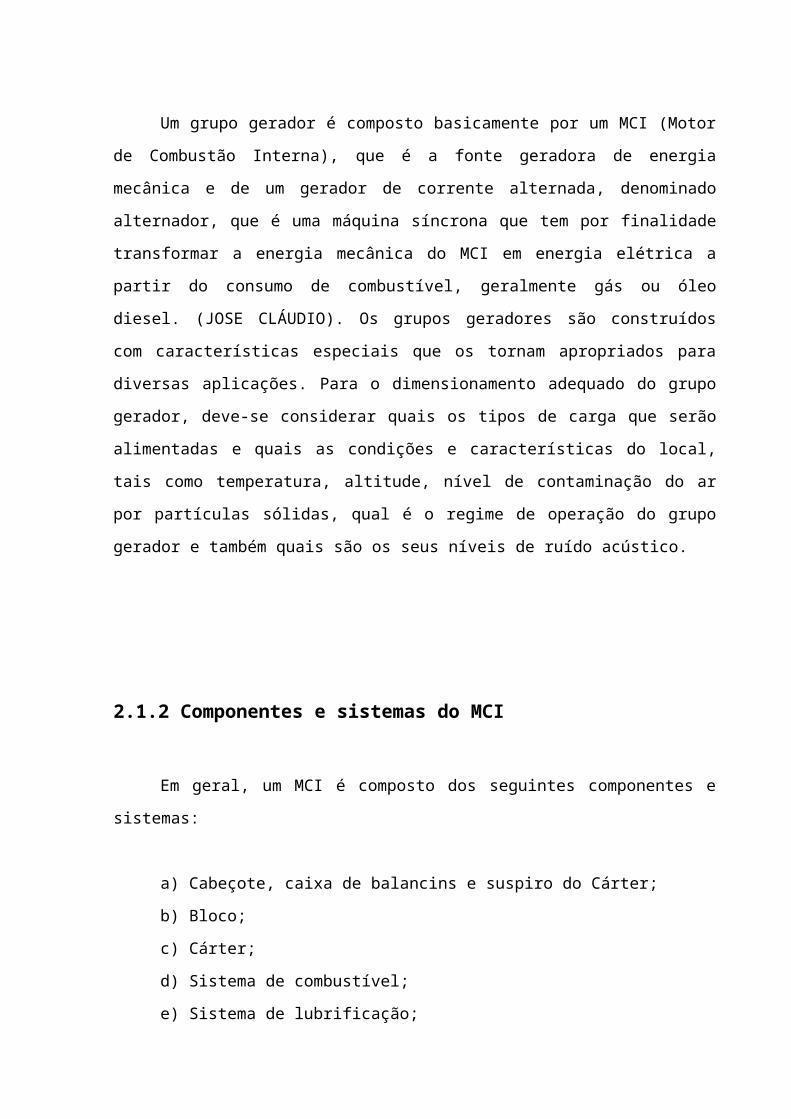
Um grupo gerador é composto basicamente por um MCI (Motor de
Combustão Interna), que é a fonte geradora de energia mecânica e de um gerador
de corrente alternada, denominado alternador, que é uma máquina síncrona que tem
por finalidade transformar a energia mecânica do MCI em energia elétrica a partir do
consumo de combustível, geralmente gás ou óleo diesel. (JOSE CLÁUDIO). Os
grupos geradores são construídos com características especiais que os tornam
apropriados para diversas aplicações. Para o dimensionamento adequado do grupo
gerador, deve-se considerar quais os tipos de carga que serão alimentadas e quais
as condições e características do local, tais como temperatura, altitude, nível de
contaminação do ar por partículas sólidas, qual é o regime de operação do grupo
gerador e também quais são os seus níveis de ruído acústico.
2.1.2 Componentes e sistemas do MCI
Em geral, um MCI é composto dos seguintes componentes e sistemas:
a) Cabeçote, caixa de balancins e suspiro do Cárter;
b) Bloco;
c) Cárter;
d) Sistema de combustível;
e) Sistema de lubrificação;
f) Sistema de arrefecimento;
g) Sistema de admissão de ar;
h) Turbocompressor;
i) Regulador de velocidade;
j) Trocador de calor;
k) Tanque de combustível;
l) Sistema de acoplamento;
m) Circulação de ar;
n) Sistema de partida.
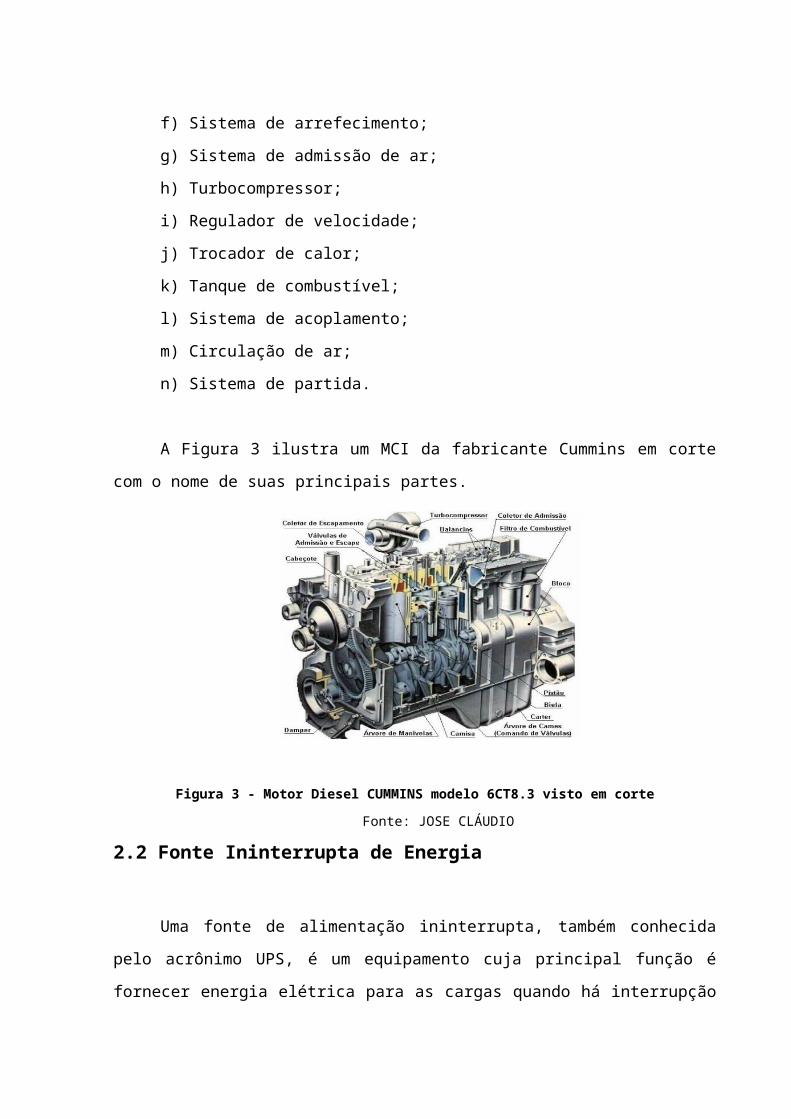
A Figura 3 ilustra um MCI da fabricante Cummins em corte com o nome de
suas principais partes.
Figura 3 - Motor Diesel CUMMINS modelo 6CT8.3 visto em corte
Fonte: JOSE CLÁUDIO
2.2 Fonte Ininterrupta de Energia
Uma fonte de alimentação ininterrupta, também conhecida pelo acrônimo
UPS, é um equipamento cuja principal função é fornecer energia elétrica para as
cargas quando há interrupção ou variações significativas no fornecimento de energia
comercial (ROGGIA, 2010). Os UPS modernos usam três tipos de sistema: “on-line”,
“line-interactive” ou “passive stand-by”.
2.2.1 UPS do tipo “ON-LINE”
Um UPS do tipo “on-line” é ideal para ambientes onde o isolamento elétrico é
necessário ou quando existem equipamentos muito sensíveis às oscilações da rede
elétrica (LIMA, 2009).
Atualmente, os UPS do tipo “on-line” são os mais caros e normalmente são
utilizados para proteger grandes instalações. A razão de ser mais caro é devido a
sua capacidade de suportar correntes maiores, pois ele utiliza um retificador e um
conversor projetado para funcionar continuamente, mesmo quando a rede de
distribuição de energia está funcionando.
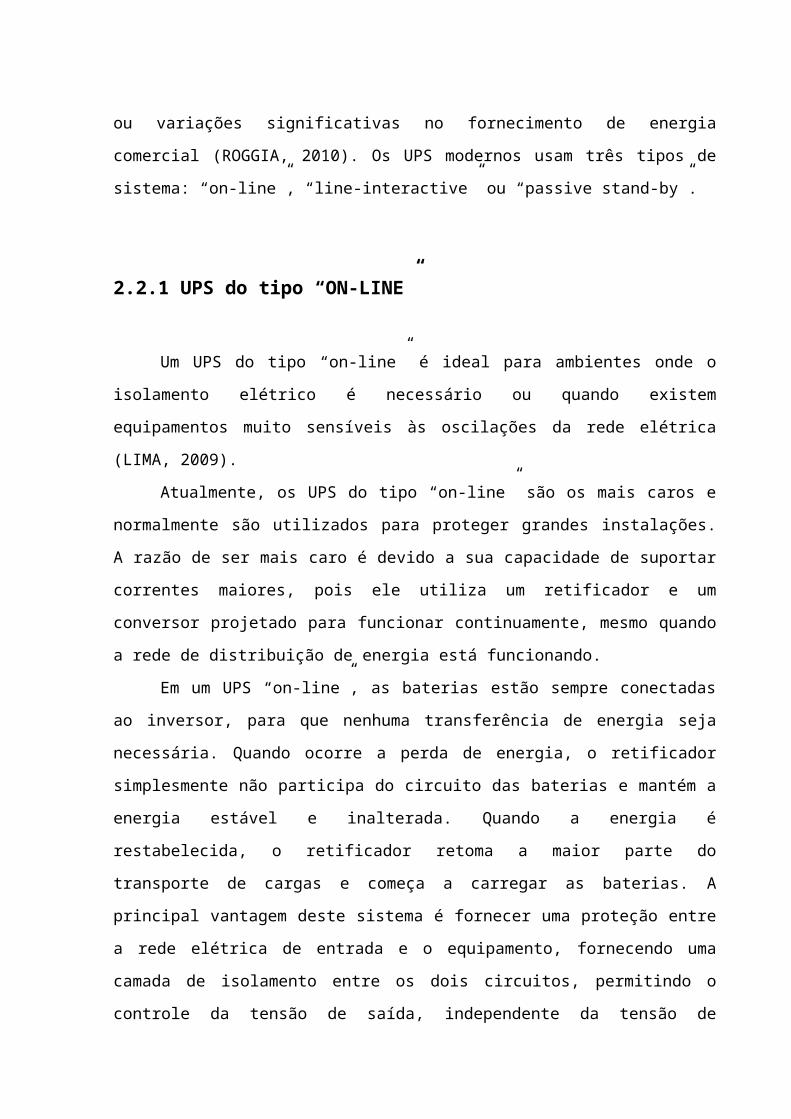
Em um UPS “on-line”, as baterias estão sempre conectadas ao inversor, para
que nenhuma transferência de energia seja necessária. Quando ocorre a perda de
energia, o retificador simplesmente não participa do circuito das baterias e mantém a
energia estável e inalterada. Quando a energia é restabelecida, o retificador retoma
a maior parte do transporte de cargas e começa a carregar as baterias. A principal
vantagem deste sistema é fornecer uma proteção entre a rede elétrica de entrada e
o equipamento, fornecendo uma camada de isolamento entre os dois circuitos,
permitindo o controle da tensão de saída, independente da tensão de entrada. A
figura 4 ilustra o funcionamento deste tipo de UPS.
Figura 4 - Funcionamento do UPS do tipo “On-line”
Fonte: LIMA, 2009
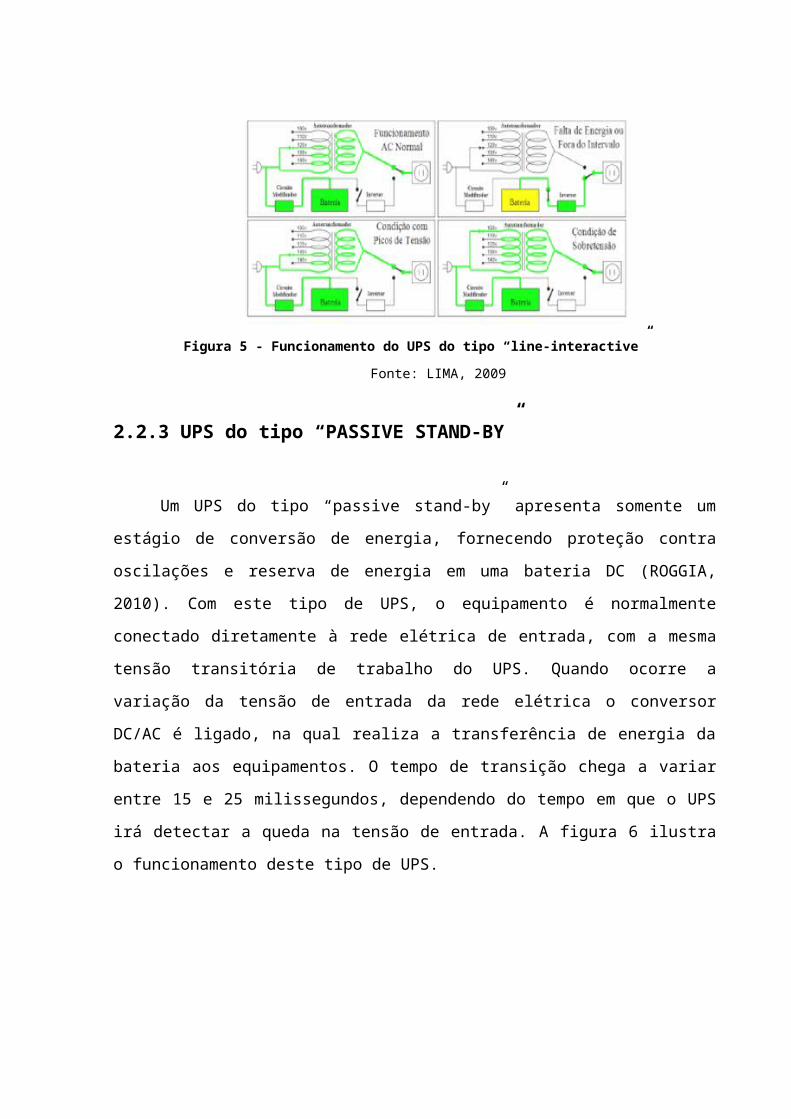
2.2.2 UPS do tipo “LINE-INTERACTIVE”
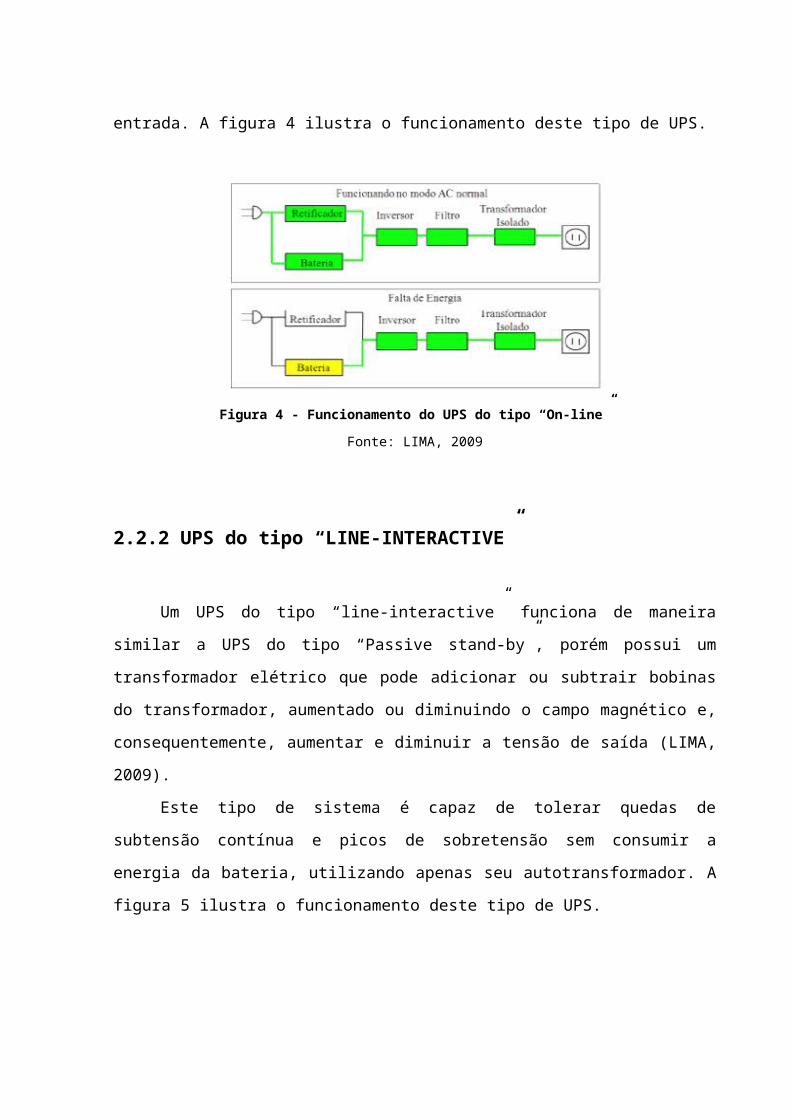
Um UPS do tipo “line-interactive” funciona de maneira similar a UPS do tipo
“Passive stand-by”, porém possui um transformador elétrico que pode adicionar ou
subtrair bobinas do transformador, aumentado ou diminuindo o campo magnético e,
consequentemente, aumentar e diminuir a tensão de saída (LIMA, 2009).
Este tipo de sistema é capaz de tolerar quedas de subtensão contínua e picos
de sobretensão sem consumir a energia da bateria, utilizando apenas seu
autotransformador. A figura 5 ilustra o funcionamento deste tipo de UPS.
Figura 5 - Funcionamento do UPS do tipo “line-interactive”
Fonte: LIMA, 2009
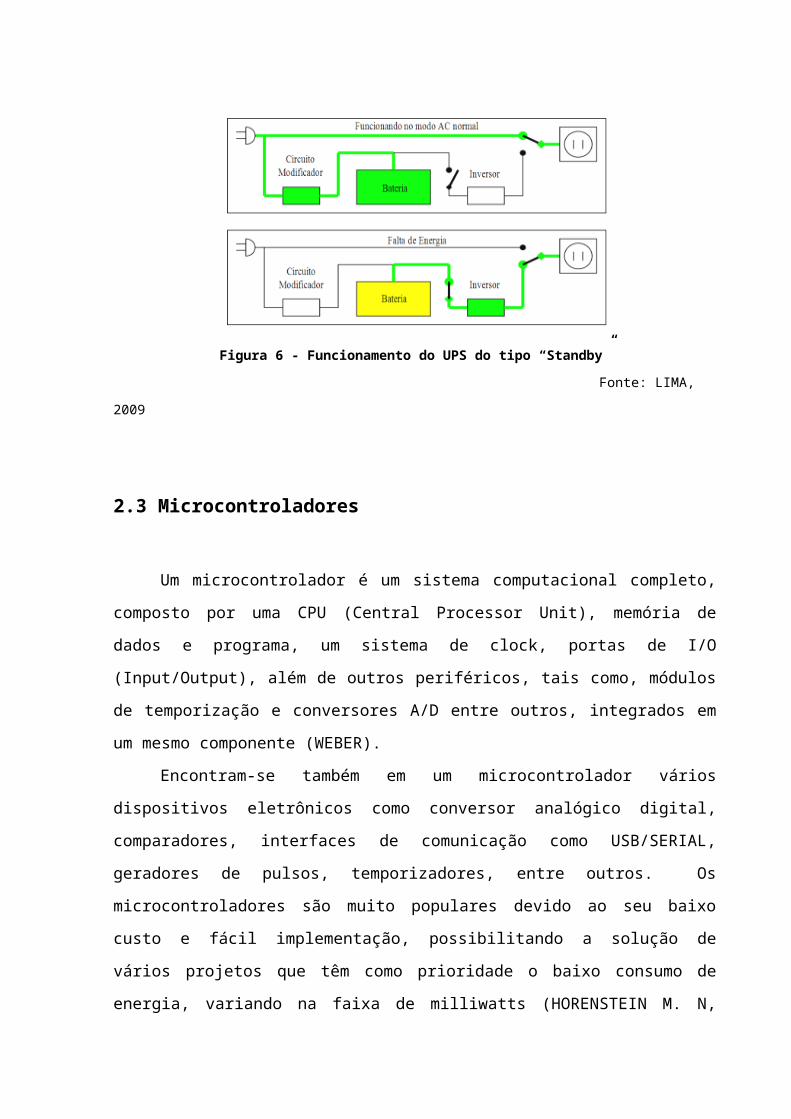
2.2.3 UPS do tipo “PASSIVE STAND-BY”
Um UPS do tipo “passive stand-by” apresenta somente um estágio de
conversão de energia, fornecendo proteção contra oscilações e reserva de energia
em uma bateria DC (ROGGIA, 2010). Com este tipo de UPS, o equipamento é
normalmente conectado diretamente à rede elétrica de entrada, com a mesma
tensão transitória de trabalho do UPS. Quando ocorre a variação da tensão de
entrada da rede elétrica o conversor DC/AC é ligado, na qual realiza a transferência
de energia da bateria aos equipamentos. O tempo de transição chega a variar entre
15 e 25 milissegundos, dependendo do tempo em que o UPS irá detectar a queda
na tensão de entrada. A figura 6 ilustra o funcionamento deste tipo de UPS.
Figura 6 - Funcionamento do UPS do tipo “Standby”
Fonte: LIMA, 2009
2.3 Microcontroladores
Um microcontrolador é um sistema computacional completo, composto por
uma CPU (Central Processor Unit), memória de dados e programa, um sistema de
clock, portas de I/O (Input/Output), além de outros periféricos, tais como, módulos de
temporização e conversores A/D entre outros, integrados em um mesmo
componente (WEBER).
Encontram-se também em um microcontrolador vários dispositivos eletrônicos
como conversor analógico digital, comparadores, interfaces de comunicação como
USB/SERIAL, geradores de pulsos, temporizadores, entre outros. Os
microcontroladores são muito populares devido ao seu baixo custo e fácil
implementação, possibilitando a solução de vários projetos que têm como prioridade
o baixo consumo de energia, variando na faixa de milliwatts (HORENSTEIN M. N,
2006).
Os microcontroladores possuem baixa frequência clock e são considerados
lentos comparados aos microprocessadores, no entanto eles são bastante
adequados para diversas aplicações.
Atualmente, grande parte dos componentes eletrônicos utilizados possuem
microcontroladores em sua arquitetura. Os microcontroladores possuem uma
capacidade de processamento que depende da família de processadores que os
mesmos utilizam. O microcontrolador que será utilizado neste protótipo é o arduino
modelo uno que baseia-se na família dos processadores ATmega328 da fabricante
ATMEL.
2.3.1 Arquiteturas dos microcontroladores
A estrutura interna dos microcontroladores pode possuir diversas formas, o
que impactará diretamente em sua capacidade de consumo de energia,
programação, armazenamento e desempenho. Os Microcontroladores que são
encontrados no mercado utilizam dois tipos de arquitetura, a de Von Neumann e a
de Harvard, ambas ilustradas pela figura 7.
Figura 7 - Arquitetura Von Neumann e Harvard
Fonte: Tecnosoluction
Microcontroladores que empregam arquiteturas que utilizam o modelo
Harvard são mais rápidos e são chamados de “RISC” (Reduced Instruction Set
Computer), que têm como principio a utilização de instruções de baixa
complexidade, reduzindo o tempo para a execução das instruções de máquina, já os
que utilizam o modelo Von Neumann são chamados de “CISC” (Complex Instruction
Set Computer), e são capazes de executar várias centenas de instruções complexas
diferentes, mas demoram muitos ciclos para serem executadas. O microcontrolador
ATmega 328, utilizado pelo microcontrolador arduíno, emprega em sua construção a
arquitetura RISC (ATMEL, 2012).
2.3.2 Principais componentes de um microcontrolador
Um microcontrolador pode ser subdividido em vários componentes. A seguir
serão descritos as principais partes dos sistemas microcontrolados.
2.3.2.1 Unidade de memória
A memória é um dos principais componentes de um microcontrolador arduíno.
Elas podem ser divididas em dois grupos, sendo eles: memória de programa
(FLASH) e memória de dados (RAM – Random Access Memory e EEPROM -
Electrically-Erasable Programmable Read-Only Memory). A utilização da memória
FLASH está diretamente relacionada com o armazenamento de tarefas que o
microcontrolador deve executar. Já a memória RAM e EEPROM são utilizadas para
armazenar os resultados e dados utilizados pelo microcontrolador. Apesar das
diferenças, ambas memórias possuem um tamanho limitado ao serem comparadas
com outros dispositivos.
Os valores de memória FLASH, RAM e EEPROM do microcontrolador
arduino, são 32 kB, 2kB e 1 kB respectivamente. Maiores informações poderão ser
consultadas no site www.arduinocc.com
2.3.2.2 Unidade Lógica Aritmética (ULA)
A unidade lógica aritmética (ULA) é a responsável pelas operações lógicas
realizadas no microcontrolador. Ela é considerada a central de processamento do
dispositivo e tipicamente realiza operações lógicas, tais como comparação, maior,
menor, igual, operações booleanas como and, or, xor e operações aritméticas como
adição, subtração, incrementação, multiplicação e divisão.
2.3.2.3 Temporizadores e contadores
Os temporizadores e contadores são os responsáveis pela contagem de
tempo e a execução das rotinas nos sistemas microcontrolados através da geração
de pulsos, rotinas em períodos específicos, entre outros. Os seus parâmetros podem
ser facilmente modificados, adequando-o para fins específicos ou gerais.
2.3.2.4 Interfaces de entrada e saída (I/O)
Os microcontroladores se interfaceiam com outros dispositivos através das
portas de entradas e saídas. Essa transmissão de dados com o meio externo pode
ser via comunicação serial, paralela e USB. Uma comunicação bastante utilizada em
microcontroladores é a comunicação USB/CDC no qual a comunicação do tipo serial
é emulada na porta USB.
O Arduino uno possui 6 portas analógicas e 14 portas digitais, além de possuir
a comunicação serial através da conexão USB.
2.3.2.5 Conversor Analógico-Digital (ADC)
Os sinais analógicos lidos pelos microcontroladores necessitam ser
condicionados para poderem ser interpretados. Sinais analógicos devem ser
convertidos em sinais digitais para que o microcontrolador possa compreendê-los e
processá-los. Esta conversão é realizada por um ADC (Analog to Digital Converter -
Conversor Analógico – Digital).
2.3.2.6 Interrupções
Este é o componente que controla os pedidos de interrupção. Vários são os
dispositivos que estão inclusos dentro de um microcontrolador e a sua maioria
dispara pedidos de interrupção que podem ser usados para a execução de rotinas
especificas
2.4 Sensores
Sensores são elementos utilizados para a detecção, medição ou gravação de
fenômenos físicos (FONSECA).
As principais características de um elemento sensor são basicamente a
função de transferência, saturação, impedância de saída, excitação e resposta em
frequência (HIGASHI, 2006). A principal característica de um elemento sensor é a
função de transferência, a qual estabelece a relação entre o sinal de entrada e o
sinal de saída, sendo sempre possível determinar uma função de transferência ideal
para um sensor. A saturação também deve ser considerada, pois todos os sensores
têm limites de funcionamento a partir dos quais perdem a sua linearidade. A
impedância de saída de um sensor é importante para o projeto do circuito de
interface com o sistema de medida. Para uma saída em tensão, à impedância de
saída (Zout) deve ser baixa e a impedância de entrada (Zin) deve ser alta.
Por outro lado, para a saída em corrente, a impedância de saída deve ser alta
e a de entrada deve ser baixa. As características de excitação especificam quais as
grandezas necessárias ao funcionamento de um sensor. Para alguns tipos de
sensores é importante saber a especificação da resposta em frequência e qual a
estabilidade necessária ao sinal de excitação. A resposta em frequência especifica
qual a sensibilidade do sensor às variações de frequência do sinal de entrada. As
características da aplicação podem também influenciar na escolha dos sensores a
utilizar. Fatores como desenho, peso, dimensões e preço são determinantes na
escolha dos sensores.
2.4.1 Tipos de Sensores
Como existem sinais analógicos e sinais discretos a serem controlados num
sistema, os sensores também devem indicar variações de grandezas analógicas e
discretas.
O sinal discreto ou digital é um sinal quantificado que indica a existência ou
não de um evento e pode assumir os valores zero ou um ou uma combinação
destes.
O sinal analógico é um sinal cuja informação pode assumir quaisquer valores
dentro de uma determinada faixa (range), podendo ser em geral um sinal de tensão
ou de corrente proporcional à grandeza física medida.
2.4.2 Sensores de Corrente
Como a maioria dos sensores, o sensor de corrente transforma ou condiciona
o valor de corrente para um padrão capaz de ser interpretado pelo sistema de
tratamento de dados, por exemplo, o próprio microcontrolador. Serão abordados
quatro métodos para a medição da corrente elétrica, porém, para este protótipo
serão utilizados apenas os métodos com o resistor shunt e com o efeito hall.
Transformador de Corrente (TC): É um dispositivo que transforma a
corrente que circula em seu enrolamento primário, através do princípio da
indução eletromagnética, que gera uma corrente no secundário. Os TC’s do
tipo ilustrado na figura 8 fornecem uma corrente proporcional às medidas no
circuito primário, além de proporcionar o isolamento galvânico para o circuito
evitando possíveis danos físicos para o equipamento.
Figura 8 - Transformador de corrente
Fonte: HIGASHI, 2006.
Resistor Shunt: É um dos métodos mais empregados para a medição da
corrente elétrica devido a sua fácil implementação e o seu baixo custo. O
processo é feito introduzindo-se uma resistência shunt, de baixo valor, em
série com a carga em que se deseja efetuar a medida. A intensidade de
corrente elétrica é obtida através da 1º lei de Ohm, equação 1, a partir da
tensão medida na resistência shunt conforme ilustrado na figura 9. As
vantagens de um resistor shunt são o seu baixo custo e a sua boa precisão,
já as suas desvantagens são o aquecimento do resistor gerado pelas altas
correntes, a tensão que causa problemas de isolação elétrica do sistema de
medida e a alta frequência que produz o Efeito Pelicular (Skin).
Figura 9 - Circuito Shunt
(1)
Bobina de Rogowski: É uma alternativa segura para medir a corrente
elétrica. Essa bobina consiste de um núcleo toroidal, não magnético, que é
colocado em torno do condutor, conforme ilustrado pela figura 10. O Campo
magnético produzido pela corrente alternada no condutor induz uma tensão
na bobina. (HIGASHI, 2006)
Figura 10 - Bobina de Rogowski
Fonte: HIGASHI, 2006.
Sensor de efeito hall: O elemento básico do sensor de efeito hall é um
pedaço de material semicondutor, denominado elemento hall, que ao ser
submetido a uma diferença de potencial, faz com que uma corrente “I” circule
por ele gerando um campo magnético “B” perpendicular ao elemento
semicondutor, com isso uma tensão “VH” extremamente pequena é gerada
em sua saída (COELHO). A figura 11 ilustra o principio de seu funcionamento
Figura 11 - Principio físico do sensor de efeito Hall
Fonte: COELHO.
A equação 2 descreve a interação do campo magnético “B”, corrente “I” e
tensão de Hall “VH” é:
(2)
Onde α é uma constante de proporcionalidade que depende da geometria
temperatura ambiente e da deformação mecânica do elemento hall e a variável θ
refere-se ao ângulo que a corrente “I” faz com o campo magnético “B”.
2.4.3 Sensor de Tensão
Devido à impossibilidade de interligar determinados valores de tensões
diretamente a circuitos de tratamento de dados, como é no caso dos
microcontroladores, é necessário à criação de meios para o condicionamento do
sinal para um valor aceitável. Para contornar esse fator é preciso padronizar os
valores de tensão adquiridos para uma faixa de valores aceitáveis pelo sistema de
processamento. A seguir apresentam-se algumas das técnicas usadas para fazer
essa padronização de tensão (TROWLER e WHITAKER, 2008).
Transformador de medida: Destina-se a redução das grandezas de tensão
ou corrente elétrica. É um transformador onde o primário é ligado ao circuito a
qual se deseja medir e o secundário é ligado no circuito de medição. A

padronização é feita ajustando a relação de espiras do primário com a do
secundário, conforme ilustra a figura 12.
Figura 12 - Transformador de medida
Fonte: WIKIPÉDIA.
Divisor de tensão: Apesar de ser uma alternativa simples e barata, o divisor
de tensão é extremamente eficaz e confiável para adequar um sinal de
tensão. O circuito reduz a tensão de entrada “Vin” através de associação de
dois ou mais resistores em série, conforme ilustra a Figura 13. A redução da
tensão baseia-se na lei de ohm e a relação de redução pode ser calculada
através da equação 3
Figura 13 - Circuito básico de um divisor de tensão.
Fonte: WIKIPÉDIA.
(3)
2.4.4 Sensores Ultrassônicos
O método ultrassônico para medida de níveis ou deslocamentos utiliza um
circuito eletrônico que fornece um trem de pulsos para excitar um transdutor piezo
elétrico o qual gera uma frente de onda de pressão acústica que se propaga no ar
até atingir um anteparo plano ou a parte superior do obstáculo, que será o próprio
combustível para este protótipo. Parte da energia acústica retorna para o transdutor
em forma de um eco após certo intervalo de tempo, conforme ilustrado pela figura
14. Medindo-se este intervalo de tempo, conhecendo a velocidade do som no ar e
desprezando fatores tais como temperatura, pressão barométrica, umidade relativa e
viscosidade do ar, é possível calcular a distância entre o transdutor e o anteparo,
através da equação 4.
Figura 14 - Emissão e recepção de um pulso emitido por um sensor ultrassônico
Fonte: WIKIPÉDIA
(4)
Onde Te é o tempo de propagação do eco em segundos (s), 340 é a velocidade de
propagação do som no ar em metros por segundo (m/s) e D é a distancia do anteparo em
metros (m).
2.4.5 Sensores Ópticos
A luz é uma forma de radiação eletromagnética oscilatória que se dispersa no
meio em que se encontra e é caracterizada pelo seu comprimento de onda. A visão
humana é sensível somente às radiações luminosas na faixa de aproximadamente
380nm (violeta) até 780nm (vermelho- escuro), conforme ilustrado pela figura 15.
Figura 15 - Faixa espectral do comprimento de onda de luz visível
Fonte: WIKIPÉDIA
Os sensores ópticos são compostos basicamente por duas partes: a emissora
de luz, que pode ser a própria luz solar ou componentes eletroeletrônicos, e o
receptor de luz é um componente eletrônico que em conjunto a um circuito detecta a
variação de luz. O emissor de luz, quando um componente eletrônico, trata-se de um
LED (diodo emissor de luz) que emite uma luz, podendo ser visível ou infravermelha.
A coloração dessa luz emitida depende da constituição química dos cristais.
Os Sensores ópticos funcionam pelo princípio de emissão e recepção de
feixes de luz, ou seja, o diodo emissor emite flashes com consideráveis potências e
curtas durações para que o receptor não confunda com a iluminação ambiente. O
receptor composto por um foto transistor sensível à luz, que em conjunto com um
filtro sintonizado na mesma frequência de pulsação dos flashes do transmissor,
permite que o receptor compreenda somente a luz emitida pelo transmissor.
Os sensores ópticos estão divididos em três sistemas:
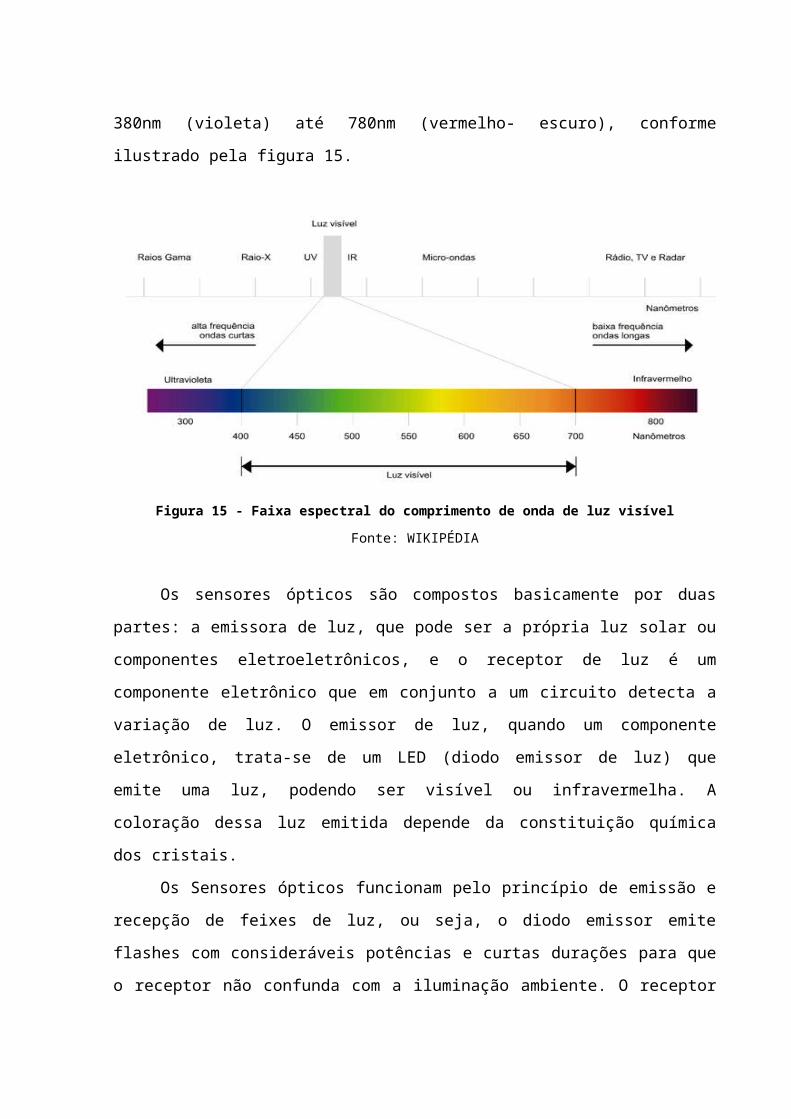
Sistema por Barreira: Neste sistema o transmissor e o receptor estão
separados do mesmo meio físico e devem estar dispostos um frente ao outro,
conforme ilustrado pela figura 16, permitindo que o receptor receba a luz do
transmissor constantemente. O acionamento da saída ocorrerá quando o
objeto a ser detectado, interromper o feixe de luz.
Figura 16 - Sistema por barreira
Fonte: THOMAZINI e ALBUQUERQUE, 2005.
Sistema por Difusão: Neste sistema o transmissor e o receptor são
montados no mesmo meio físico, sendo que o acionamento da saída somente
ocorrerá quando o objeto a ser detectado entrar na região de sensibilidade e
refletir para o receptor o feixe de luz emitido pelo transmissor, conforme
ilustrado pela figura 17.
Figura 17 - Sistema por difusão
Fonte: THOMAZINI e ALBUQUERQUE, 2005.
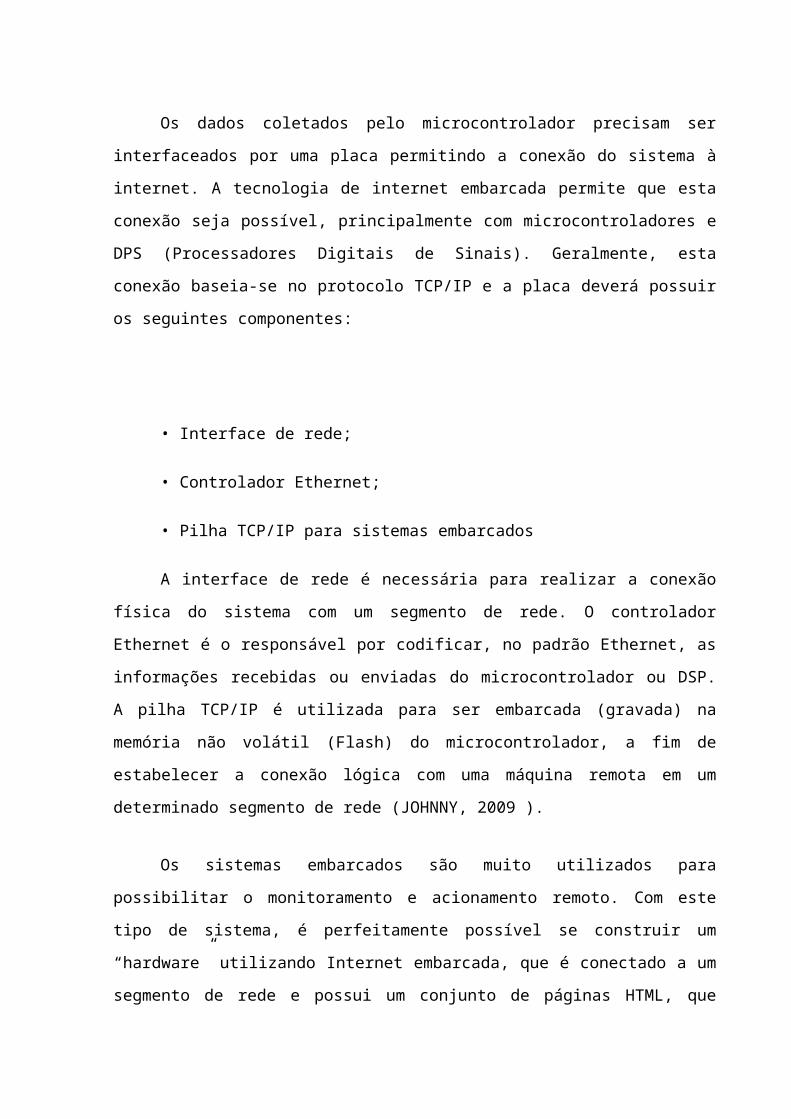
Sistema por Reflexão: Este sistema apresenta o transmissor e o receptor no
mesmo meio físico. O feixe de luz chega ao receptor somente após ser
refletido por um prisma e o acionamento da sua saída ocorrerá quando o
objeto a ser detectado interromper este feixe, conforme ilustrado pela figura
18.
Figura 18 - Sistema por reflexão
Fonte: THOMAZINI e ALBUQUERQUE, 2005.
2.5 Internet Embarcada
Os dados coletados pelo microcontrolador precisam ser interfaceados por
uma placa permitindo a conexão do sistema à internet. A tecnologia de internet
embarcada permite que esta conexão seja possível, principalmente com
microcontroladores e DPS (Processadores Digitais de Sinais). Geralmente, esta
conexão baseia-se no protocolo TCP/IP e a placa deverá possuir os seguintes
componentes:
• Interface de rede;
• Controlador Ethernet;
• Pilha TCP/IP para sistemas embarcados
A interface de rede é necessária para realizar a conexão física do sistema
com um segmento de rede. O controlador Ethernet é o responsável por codificar, no
padrão Ethernet, as informações recebidas ou enviadas do microcontrolador ou DSP.
A pilha TCP/IP é utilizada para ser embarcada (gravada) na memória não volátil
(Flash) do microcontrolador, a fim de estabelecer a conexão lógica com uma
máquina remota em um determinado segmento de rede (JOHNNY, 2009 ).
Os sistemas embarcados são muito utilizados para possibilitar o
monitoramento e acionamento remoto. Com este tipo de sistema, é perfeitamente
possível se construir um “hardware” utilizando Internet embarcada, que é conectado
a um segmento de rede e possui um conjunto de páginas HTML, que permitem que
dispositivos conectados ao mesmo sejam controlados e monitorados remotamente e
em tempo real conforme ilustra a figura 19.
Figura 19 - Infraestrutura de um sistema de monitoramento pela internet
Fonte: JOHNNY, 2009.

A plataforma responsável pelo interfaceamento entre o microcontrolador e a
internet para este protótipo será a placa Arduino Ethernet Shield, conforme ilustrado
pela figura 20. Este Shield é uma placa de desenvolvimento para soluções
Internet/Ethernet que possui o controlador Wiznet W5100.
Figura 20 - Arduino Shield Internet
Fonte: ARDUINO CC.

3 PROJETO E IMPLEMENTAÇÃO
Nesse capítulo serão descritos todos os procedimentos que foram realizados
durante o período de desenvolvimento do protótipo, incluindo os dimensionamentos,
confecção dos módulos sensores, diagramas, esquemáticos e a implementação do
software.
3.1 Visão geral do projeto
O protótipo do sistema integrado de monitoramento terá todo seu
processamento de dados realizado por um microcontrolador arduíno, em sua versão
uno, na qual sensores analógicos e digitais estarão interligados às respectivas
portas do microcontrolador que fará o interfaceamento com a placa Arduíno shield
ethernet, permitindo que os dados sejam visualizados pelo usuário através da
internet ou uma rede interna.
Para simplificação e uniformização do capítulo, o protótipo será apresentado
da mesma forma como foi projetado, ou seja, começando pelo dimensionamento do
número de sensores e a confecção dos módulos sensores do UPS e do grupo
gerador respectivamente.
3.2 Dimensionamento do microcontrolador
O microcontrolador utilizado é o Arduíno uno, com 10 bits de resolução, que
possui um total de 6 portas analógicas e 14 portas digitais, como demonstrado na
figura 21.

Figura 21 - Placa Arduíno uno com indicação do número de portas
Fonte: ARDUÍNO CC
Antes do início do trabalho, foram realizados alguns levantamentos, tais como
o dimensionamento do número de portas necessárias para a conexão dos sensores
e a cotação e compra dos componentes necessários para a implementação do
hardware.
A tabela 1 mostra o a quantidade de portas analógicas e digitais utilizadas
com a indicação dos respectivos sensores conectados em cada uma delas.
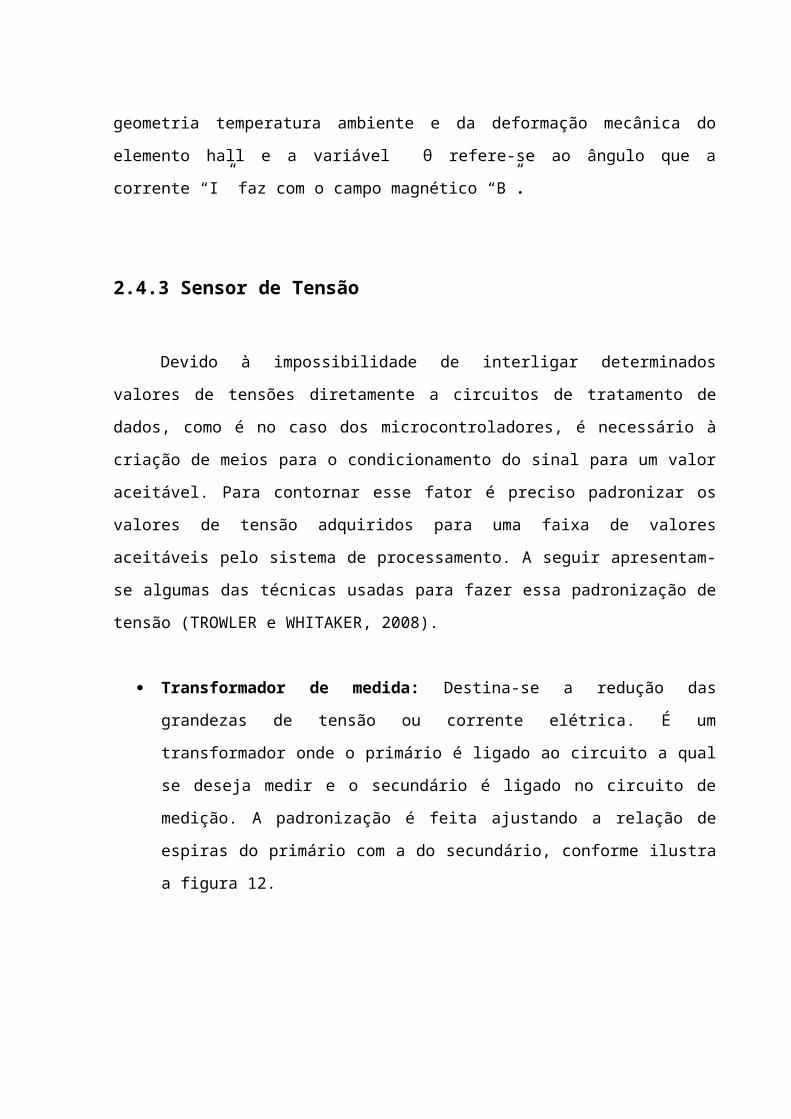
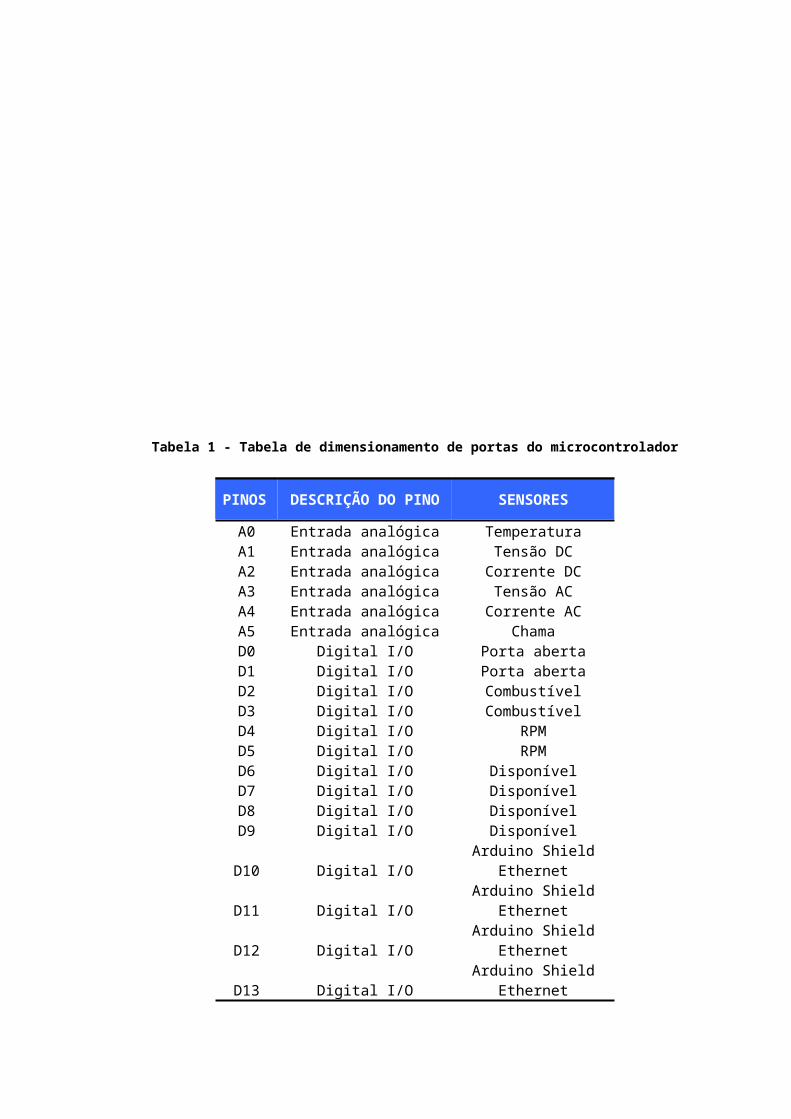
Tabela 1 - Tabela de dimensionamento de portas do microcontrolador
PINOS DESCRIÇÃO DO PINO SENSORES
A0 Entrada analógica TemperaturaA1 Entrada analógica Tensão DCA2 Entrada analógica Corrente DCA3 Entrada analógica Tensão ACA4 Entrada analógica Corrente ACA5 Entrada analógica ChamaD0 Digital I/O Porta abertaD1 Digital I/O Porta abertaD2 Digital I/O CombustívelD3 Digital I/O CombustívelD4 Digital I/O RPMD5 Digital I/O RPMD6 Digital I/O DisponívelD7 Digital I/O DisponívelD8 Digital I/O DisponívelD9 Digital I/O Disponível
D10 Digital I/OArduino Shield Ether-
net
D11 Digital I/OArduino Shield Ether-
net
D12 Digital I/OArduino Shield Ether-
net
D13 Digital I/OArduino Shield Ether-
net
3.3 Sensores para monitoramento do UPS
3.3.1 Sensor de Temperatura
Para o monitoramento da temperatura ambiente, onde são instaladas as
fontes ininterruptas de energia, foi utilizado o sensor de estado sólido de silício de
código LM 35 da fabricante Texas Instruments, ilustrado na figura 22.

Figura 22 - Sensor de temperatura LM-35
Fonte: TEXAS INSTRUMENT, 2012.
A escolha do LM 35 para o sensoriamento da temperatura, deu-se por sua
ótima precisão e linearidade, além do baixo custo e sua simples implementação.
De acordo com o fabricante, Texas Instrument, o LM 35 diferentemente de
outros sensores, não precisa ser calibrado, pois já possui uma precisão de +/- ¼ º C
a + 25ºC.
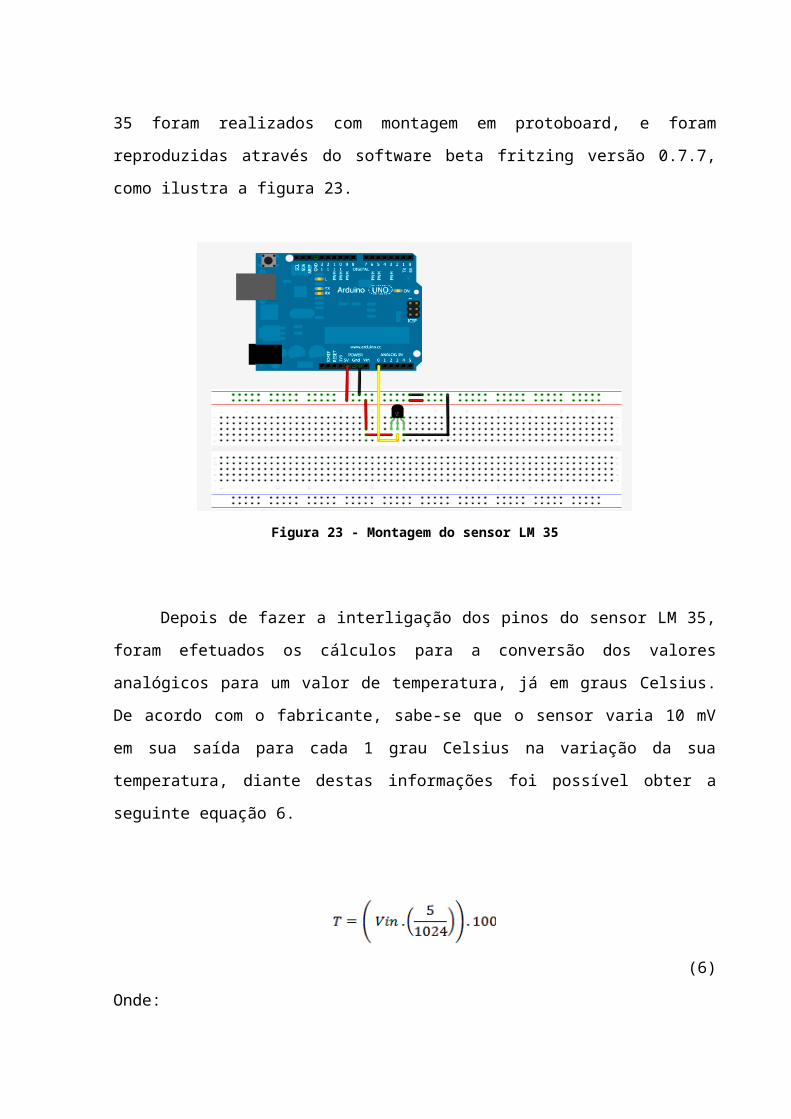
Algumas medições foram realizadas e estão descritas no próximo capítulo. Os
primeiros testes experimentais com o LM 35 foram realizados com montagem em
protoboard, e foram reproduzidas através do software beta fritzing versão 0.7.7,
como ilustra a figura 23.
Figura 23 - Montagem do sensor LM 35
Depois de fazer a interligação dos pinos do sensor LM 35, foram efetuados os
cálculos para a conversão dos valores analógicos para um valor de temperatura, já

em graus Celsius. De acordo com o fabricante, sabe-se que o sensor varia 10 mV
em sua saída para cada 1 grau Celsius na variação da sua temperatura, diante
destas informações foi possível obter a seguinte equação 6.
(6)
Onde:
é a temperatura aferida em graus Celsius;
é a tensão lida no pino de saída no sensor LM 35 em volts (V);
5 é a tensão máxima lida pelo arduino em volts (V);
1024 é o valor do nível de discretização do conversor A/D de 10 Bits;
100 é o fator de multiplicação para converter volts em milivolts
Após concluído todos os testes em protoboard e realizados todos os ajustes
necessários, foram inicializados os processos para a confecção da PCI (Placa de
Circuito Impresso). Utilizando o software Beta Fritzzing, versão 0.7.7, foi criado o
layout da placa e esta repassada para a placa de fenolite através do princípio
térmico.
Após a transferência do layout, a placa foi submetida a uma solução de
percloreto de ferro, FeClᴣ, para eliminar a camada de cobre não utilizada pelas
trilhas, em seguida, a placa foi furada, os componentes posicionados e soldados
com estanho. Para melhorar a condutividade das placas, as trilhas receberam por
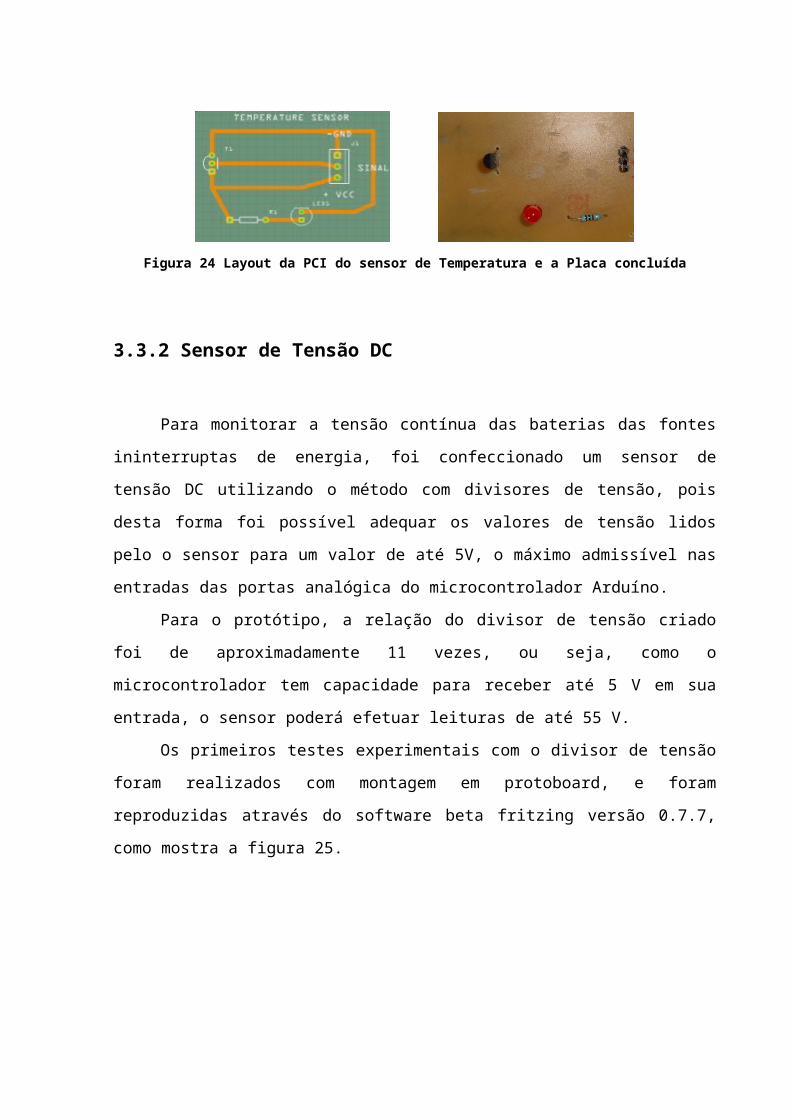
toda extensão uma leve camada de estanho. A figura 24 mostra o layout da placa e
a placa concluída.
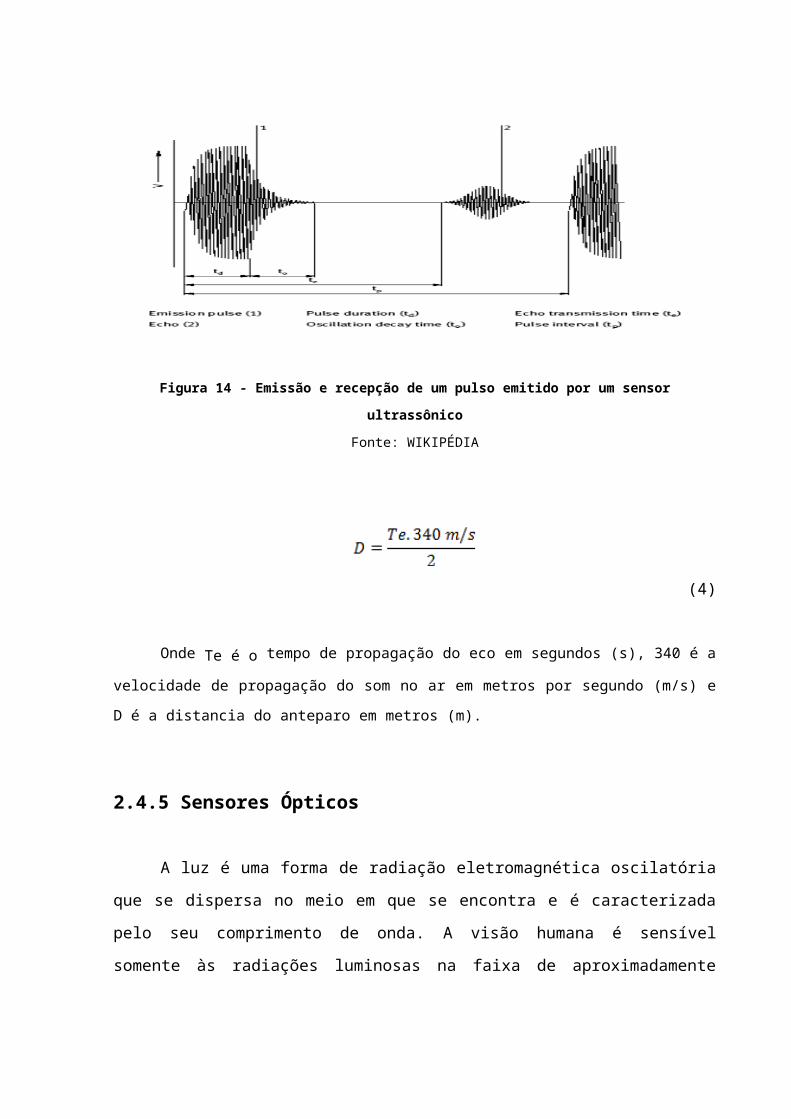
Figura 24 Layout da PCI do sensor de Temperatura e a Placa concluída
3.3.2 Sensor de Tensão DC
Para monitorar a tensão contínua das baterias das fontes ininterruptas de
energia, foi confeccionado um sensor de tensão DC utilizando o método com
divisores de tensão, pois desta forma foi possível adequar os valores de tensão lidos
pelo o sensor para um valor de até 5V, o máximo admissível nas entradas das portas
analógica do microcontrolador Arduíno.
Para o protótipo, a relação do divisor de tensão criado foi de
aproximadamente 11 vezes, ou seja, como o microcontrolador tem capacidade para
receber até 5 V em sua entrada, o sensor poderá efetuar leituras de até 55 V.
Os primeiros testes experimentais com o divisor de tensão foram realizados
com montagem em protoboard, e foram reproduzidas através do software beta
fritzing versão 0.7.7, como mostra a figura 25.
Figura 25 - Sensor de tensão DC
Para a relação da queda de tensão calculada, foram utilizados 2 resistores de
¼ W com valores de R1 = 100 kΩ e R2 = 10 kΩ. A equação 7 mostra como foi
calculado o valor máximo de tensão que poderá ser mensurado pelo sensor sem
danificar o microcontrolador.
(7)
Após concluído todos os testes em protoboard e realizados todos os ajustes
necessários, foram inicializados os processos para a confecção da PCI (Placa de
Circuito Impresso), adotando os mesmos procedimentos utilizados na confecção do
circuito anterior. A figura 26 mostra o layout da placa e a placa concluída.
Figura 26 - Layout da PCI do sensor de Tensão DC e a Placa concluída
3.3.3 Sensor de Corrente DC
Para a medição da corrente elétrica contínua consumida das baterias do UPS,
foi confeccionado um sensor utilizando o método do resistor shunt. Para o protótipo
foi utilizado um resistor shunt de 0,10 Ω com 5W de potência e com tolerância de 5%
do seu valor nominal, conforme ilustra a figura 27.
Figura 27 - Resistor shunt de 0.10 Ω com 5 W de potência
Fonte: WIKIPÉDIA
De acordo com a equação 8, para cada 1 ampère no resistor, teremos uma
queda de tensão no mesmo resistor de 100 mV.
(8)
Com o microcontrolador de 10 bits, a discretização máxima será de 1024
valores digitais, assim, a resolução será de 204,6 valores digitais para cada um Volt
e de 20,46 valores digitais para cada 1 ampère.
Os primeiros testes experimentais com o resistor shunt foram realizados com
montagem em protoboard, e foram reproduzidas através do software beta fritzing
versão 0.7.7 como mostra a figura 28.
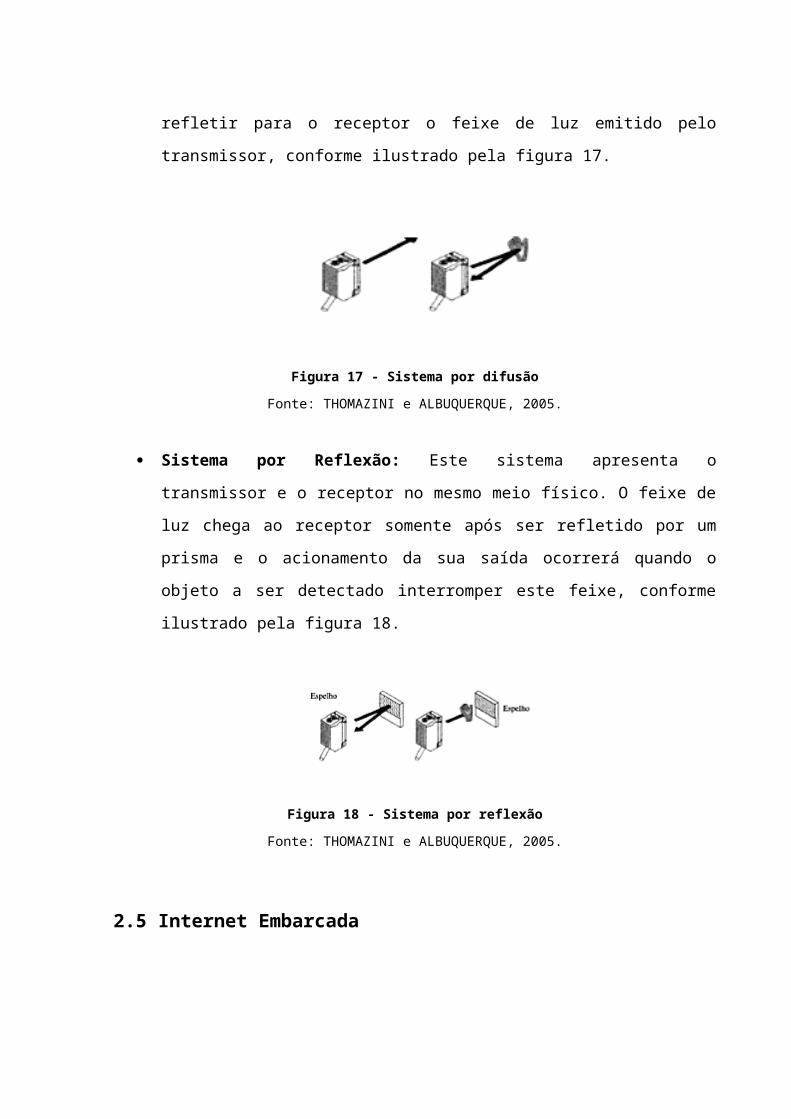
Figura 28 - Sensor de corrente DC.
A equação 9 demonstra o cálculo para o valor máximo de corrente que poderá
ser mensurado pelo sensor sem danificar o resistor shunt e o microcontrolador.
(9)
Após concluído todos os testes em protoboard e realizados todos os ajustes
necessários, foram inicializados os processos para a confecção da PCI (Placa de
Circuito Impresso) adotando os mesmos procedimentos utilizados na confecção do
circuito anterior. A figura 29 mostra o layout da placa e a placa concluída.
Figura 29 - Layout da PCI do sensor de Tensão DC e a Placa concluída
3.3.4 Sensor de Porta Aberta
Devido à sensibilidade do UPS às temperaturas elevadas, o ambiente de sua
instalação deve ser climatizado e a temperatura deve ser mantida em torno de 21 º
C. Para que a temperatura permaneça nessa faixa é necessário que o ambiente seja
isolado termicamente ou simplesmente tenham portas e janelas devidamente
fechadas. Devido aos inúmeros problemas que afetam os UPS pela variação da
temperatura, decidiu-se elaborar um sensor que detectará quaisquer portas que
fiquem abertas por um determinado tempo e fará o reporte da situação para a
interface de monitoramento para conhecimento dos responsáveis.Para a confecção
deste sensor, foi utilizado uma chave fim de curso que será instalada nos batentes
das portas para detectar sua abertura ou fechamento. Para as pessoas que
entrarem no recinto e esquecerem ou deixarem a porta aberta por um determinado
tempo, uma sirene e uma luz serão acionados para alertá-los no local.
Para a implementação do sensor de porta aberta, foi utilizado 2 entradas
digitais do microcontrolador, sendo uma para a chave fim de curso e outra para o
buzzer e o Led de alto brilho, que fará a função da sirene e da luz.
Na implementação do software foram determinadas as seguintes condições:
Ao abrir a porta, a pessoa terá 60 segundos para fechá-la novamente para
que o alarme não soe e os responsáveis não sejam avisados.
Se ao abrir a porta e ela permanecer aberta por mais de 60 segundos, o
buzzer e o LED serão acionados no local e os responsáveis poderão
consultar a ocorrência pela interface de monitoramento. Para cessar a
condição, basta fechar a porta.
Os primeiros testes experimentais com sensor de porta aberta foram
realizados com montagem em protoboard, e foram reproduzidas através do software
beta fritzing versão 0.7.7, como mostra a figura 30.
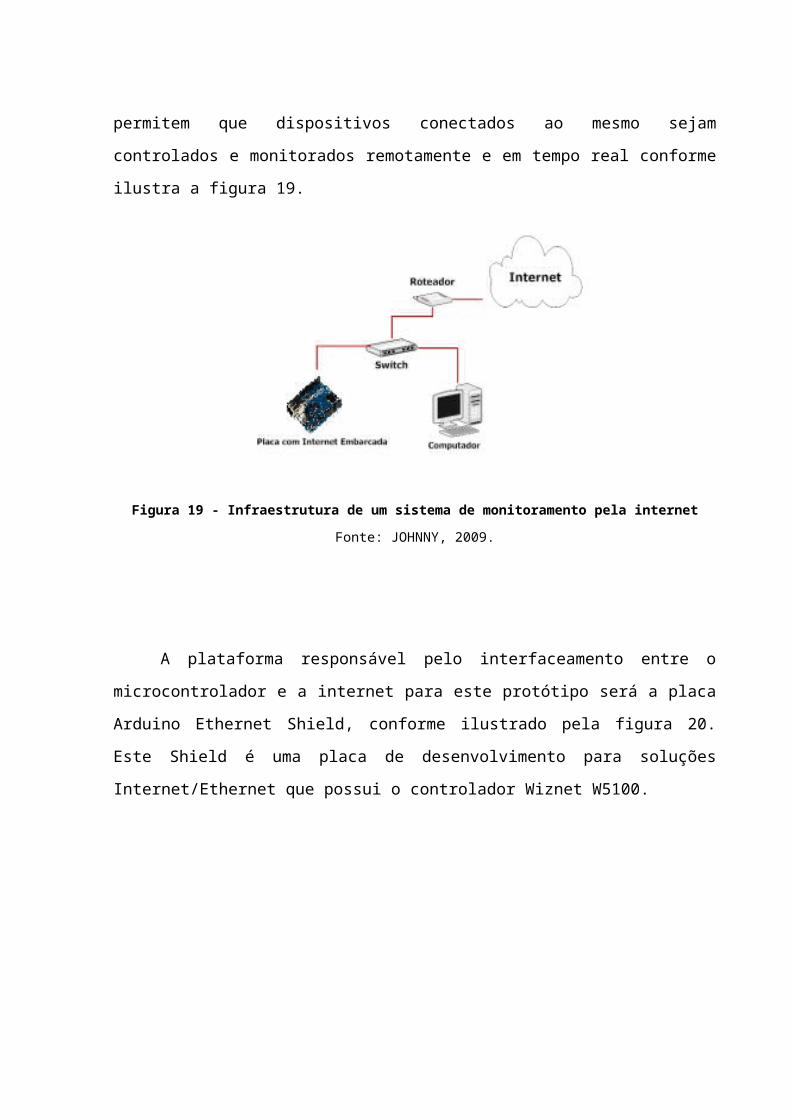
Figura 30 - Sensor de porta aberta
Após concluído todos os testes em protoboard e realizados todos os ajustes
necessários, foram inicializados os processos para a confecção da PCI (Placa de
Circuito Impresso), adotando os mesmos procedimentos utilizados na confecção do
circuito anterior. A figura 31 mostra o layout da placa e a placa concluída.
Figura 31 - Layout da PCI do sensor de Tensão DC e a Placa concluída
3.4 Sensores para monitoramento do grupo gerador
3.4.1 Sensor de Tensão AC
O monitoramento da tensão de saída do gerador é de grande importância,
pois é esta tensão gerada que manterá o funcionamento de todos os equipamentos

e quaisquer variações podem trazer sérios danos para os equipamentos ou até
mesmo para o próprio grupo gerador.
Para monitorar a tensão gerada pelo grupo gerador, quando houver
interrupção na energia comercial, foi confeccionado um sensor de tensão alternada
que medirá o valor médio gerado e o mostrará na tela de monitoramento do sistema
em tempo real.
Devido ao limite de 5 Volts DC na entrada do microcontrolador, para efetuar a
medição de tensão alternada, foi necessário utilizar um divisor de tensão seguido de
uma ponte retificadora de onda completa, desta forma, foi possível reduzir a tensão
alternada e retificá-la para um valor menor ou igual a 5 volts.
Neste protótipo a medição da tensão será simulada em um motor. A tensão
de entrada de uma máquina rotativa qualquer será medida e esse valor será
mostrado em tempo real na tela de monitoramento.
Para o sensor de tensão AC, foi criado um divisor de tensão com uma relação
de redução de 11 vezes e foi subtraído 1,4 V devido à queda de tensão dos diodos
da ponte retificadora. Com o auxílio do software EWB (Electronics Workbench), foi
dimensionado um sensor de tensão AC com capacidade para medir até 310 V de
pico, ou seja , o equivalente a 220 V eficaz.
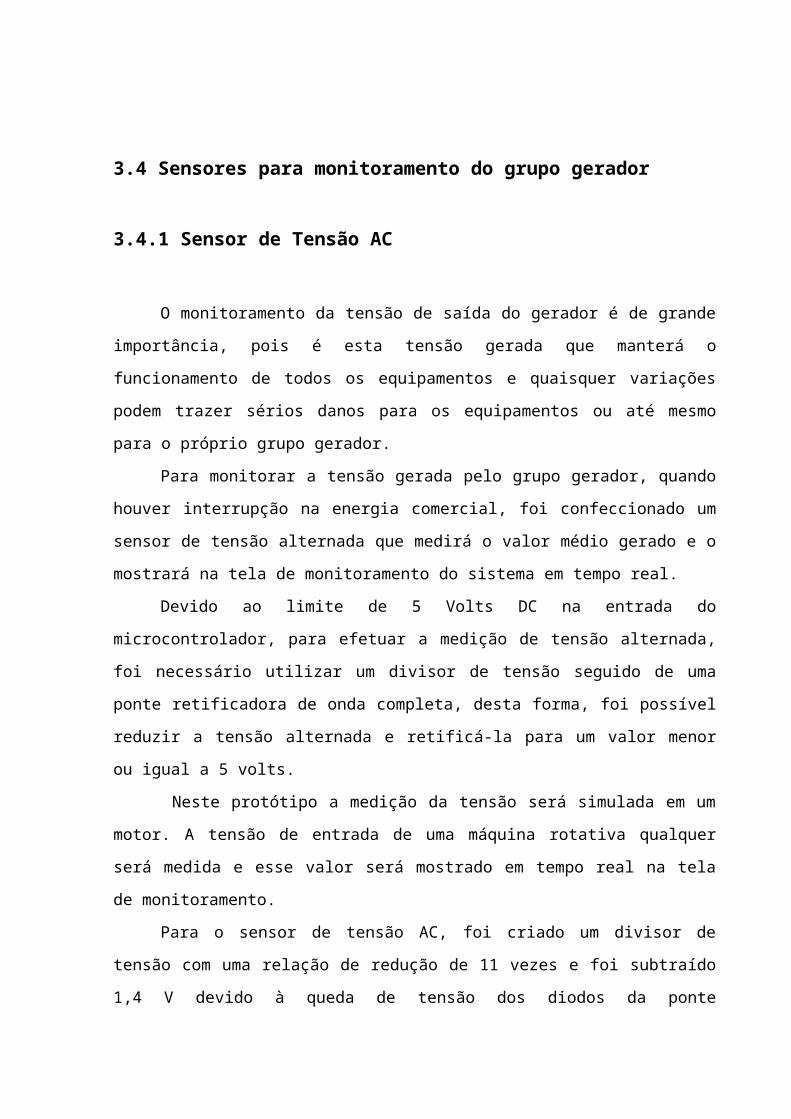
Os primeiros testes experimentais com o divisor de tensão e a ponte
retificadora foram montados em protoboard, e foram reproduzidas através do
software beta fritzing versão 0.7.7 como mostra a figura 32.
Figura 32 - Sensor de tensão AC
Para a queda de tensão de 11 vezes, foram utilizados 2 resistores de ¼ W
com valores de R1 = 100 kΩ e R2 = 10 kΩ. Já para o processo de retificação, foram
utilizados 4 diodos 1N4007, um capacitor eletrolítico de 4,7 μF e um resistor de 3 kΩ.
A equação 10 demonstra como foi calculado o valor máximo de tensão que
poderá ser mensurado pelo sensor sem danificar o microcontrolador e os
componentes do sensor.
(10)
Após concluído todos os testes em protoboard e realizados todos os ajustes
necessários, foram inicializados os processos para a confecção da PCI (Placa de
Circuito Impresso), adotando os mesmos procedimentos utilizados na confecção do
circuito anterior. A figura 33 mostra o layout da placa e a placa concluída.
Figura 33 - Layout da PCI do sensor de Tensão AC e a Placa concluída
3.4.2 Sensor de Corrente AC
O monitoramento do consumo de corrente em um grupo gerador é muito
importante, pois somente com este valor é possível determinar a potência elétrica
gerada. Todo gerador é dimensionado para um determinado valor máximo de
potência, portanto, é imprescindível o monitoramento da corrente elétrica e
consequentemente o monitoramento da potência que o gerador esta produzindo

para evitar possíveis sobrecargas no sistema.
Diferentemente do sensor de corrente DC, na qual foi utilizado o método de
medição com um resistor shunt para determinar a corrente, no sensor de corrente
AC, foi utilizado um sensor que utiliza o principio do efeito Hall, mais
especificamente o sensor ACS712-30 do fabricante Allegro com capacidade de
medição de até 30 A, conforme ilustrado na figura 34.
Figura 34 - Sensor de corrente ACS712-30
Fonte: ALLEGRO, 2012.
Um dos principais fatores que levaram a escolha deste sensor foi a de ele não
ser invasivo, ou seja, proporciona um isolamento galvânico entre a carga e o
microcontrolador, o que é extremamente desejável em aplicações envolvendo
cargas de alta tensão.
Este sensor foi adquirido pronto, pois seu circuito integrado é caro, não
compensando a sua confecção.
Algumas vantagens do ACS712 -30 fornecidas pelo fabricante Allegro:
Baixo Ruído;
Erro de saída de 1,5% a 25ºC, e 4% a temperatura de -40ºC a 85ºC;
Operação em 5V;
66 mV de sensibilidade para o ACS712-30;
Tensão proporcional à corrente AC e DC;
Histerese quase nula.
Maiores informações poderão ser consultadas através da folha de dados do
componente incluso no anexo A ou pelo site do fabricante www.allegromicro.com.
A figura 35 ilustra o diagrama de pinagem do circuito integrado e como o
sensor deverá ser interligado para as medições.
Figura 35 - Diagrama de pinagem e aplicações típicas
Fonte: ALLEGRO, 2012
Os primeiros testes experimentais com o sensor de corrente ACS712-30
foram realizados com a sua ligação diretamente ao microcontrolador e foram
reproduzidas através do software beta fritzing versão 0.7.7 como mostra a figura 36.
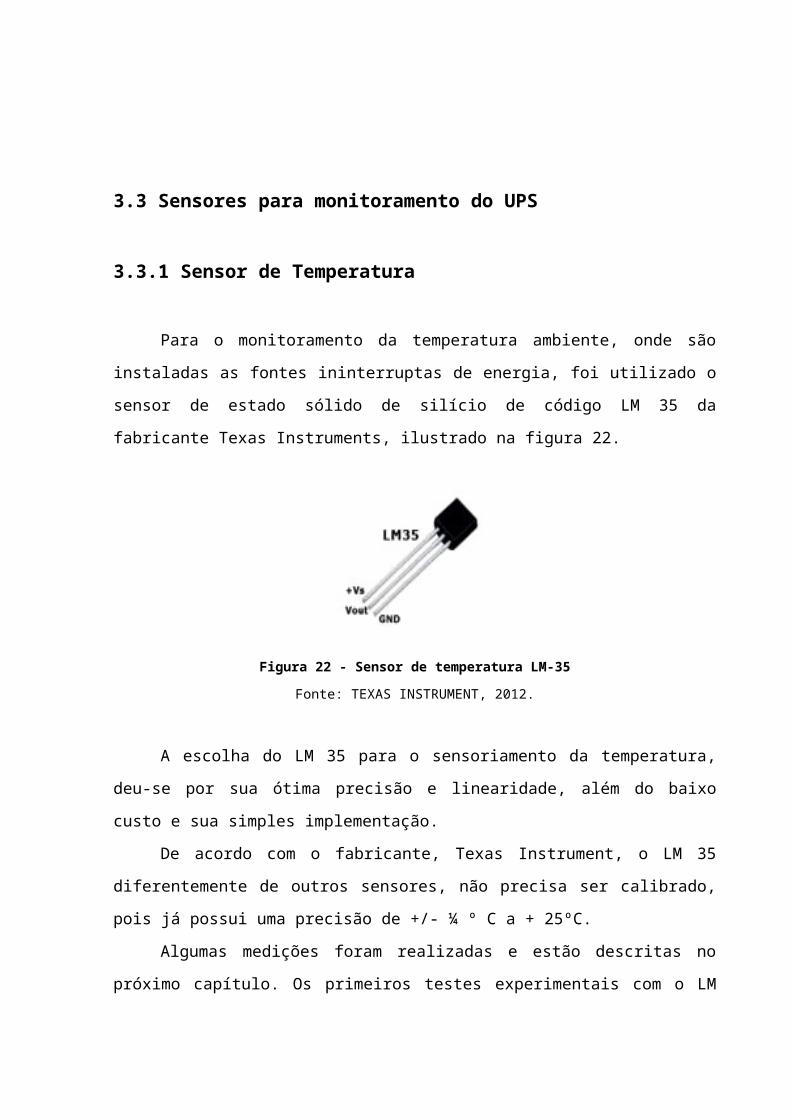
Figura 36 - Sensor de Corrente AC
3.4.3 Sensor de RPM
O monitoramento do RPM é essencial, pois somente através dele é possível
determinar a frequência da tensão gerada, com padrão de 60Hz em nosso país.
Para mensurar o número de rotações por minuto foi utilizado um sensor com
princípios ópticos, compostos basicamente por um LED emissor e um LED foto
transistor conforme ilustrado na figura 37.
Figura 37 - Fototransistor e LED emissor
O principio de funcionamento adotado para a confecção deste sensor foi o de
sistema de barreira, ou seja, quando um material interrompe o feixe de luz emitido
pelo diodo IR e recebido pelo fototransistor, é contabilizado uma volta. Portanto, o
total de interrupções em um intervalo de um minuto será o valor do RPM
apresentado em nossa tela de monitoramento.
Os primeiros testes experimentais com o sensor de RPM foram montados em
protoboard e foram reproduzidas através do software beta fritzing versão 0.7.7 como
ilustra a figura 38.
Figura 38 - Sensor de RPM
Após concluído todos os testes em protoboard e realizados todos os ajustes
necessários, foram inicializados os processos para a confecção da PCI (Placa de
Circuito Impresso), adotando os mesmos procedimentos utilizados na confecção do
circuito anterior. A figura 39 mostra o layout da placa e a placa concluída.
Figura 39 - Layout da PCI do sensor de RPM e a Placa concluída
3.4.4 Sensor de Nível de Combustível

O monitoramento do nível de combustível para um grupo gerador deve ter um
acompanhamento minucioso, pois qualquer descuido é o suficiente para interromper
o funcionamento do MCI, consequentemente, cessar o fornecimento de energia.
Para monitorarmos o nível do reservatório, foi utilizado o principio de medição
ultrassônico com o sensor HC-SR04 do fabricante iteadstudio, conforme ilustrado na
figura 40.
Figura 40 - Sensor ultrassônico HC-SR04 da Iteadstudio
Fonte: Iteastudio, 2012.
Os principais fatores que levaram a escolha deste sensor ultrassônico foi a
sua capacidade de detectar uma variedade de materiais, independente da forma e
da cor e a capacidade de detectar sólidos tanto como líquidos, como é o caso deste
protótipo. Outros fatores como atmosferas poluídas por fumaça, poeira ou umidade
também não impedem a detecção.
O sensor HC-SR04 já foi adquirido pronto, pois os cristais piezoelétricos
custam caros, quase o preço do sensor pronto.
Algumas vantagens do HC-SR04 fornecidas pelo fabricante iteadstudio
Alimentação de 5 V DC
Corrente de repouso menos que 2 mA
Ângulo eficaz menor que 15 °
Range de 2 cm a 400 cm
Precisão de 0.3 cm
Maiores informações sobre o HC-SR04 poderão ser consultadas através da
folha de dados do componente incluso no anexo B ou pelo site do fabricante
www.iteadstudio.com
O Protótipo contará com um reservatório vertical em formato de um cilindro
perfeito, ou seja, com a área da base igual em toda a sua extensão, semelhante ao
ilustrado na figura 41.
Figura 41 - Reservatório utilizado no protótipo
Os primeiros testes experimentais com o sensor ultrassônico HC-SR04, foram
realizados com a sua ligação diretamente ao microcontrolador e as imagens foram
reproduzidas através do software beta fritzing versão 0.7.7 como ilustrado a figura
42.
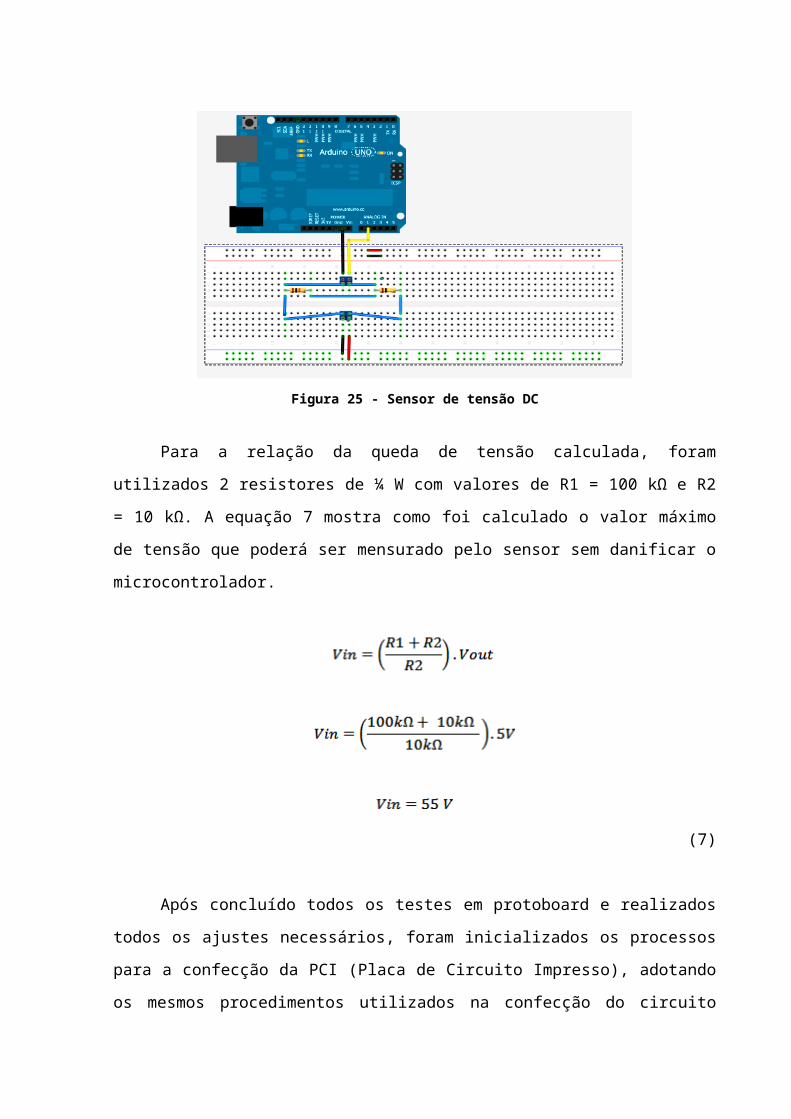
Figura 42 - Sensor ultrassônico
Para determinar o volume de combustível, será necessário conhecer a área
da base e a altura do reservatório A equação 11 descreve como será calculado o
volume de combustível, para um reservatório cilíndrico.
(11)
Onde:
V é o volume em metros cúbicos (m³);
Π é a letra grega PI com valor de 3,14159225;
r é o raio da base do reservatório em metros (m);
340 é a velocidade do som no ar em [m/s], desprezando ação da temperatura;
Te é o Tempo de propagação do eco em segundos (s).
.
3.4.5 Sensor de Chama
Para complementar o sistema, um sensor de chama será instalado próximo
aos equipamentos para a detecção de qualquer principio de incêndio que possa vir

ocorrer.
É muito comum incêndios acontecerem em KF’s (Casas de força),
principalmente em geradores que utilizam o etanol como combustível, porém,
mesmo em geradores a diesel é comum iniciarem incêndios devido a curto-circuito.
A detecção das chamas se dará através dos princípios óticos e o sensor
utilizado será o sensor de chama do fabricante rfrobot, conforme ilustrado na figura
43.
Figura 43 - Sensor de chama da Rfrobot
Fonte: RFRobot, 2012.
O Sensor de chama é basicamente composto por um fototransistor de alta
sensibilidade à radiação. De acordo com o fabricante, o sensor é funcional apenas
para a faixa espectral de 700nm a 1200nm, identificando somente as radiações
contidas nesse intervalo. A figura 44 mostra a curva característica do sensor para
determinados comprimentos de onda.
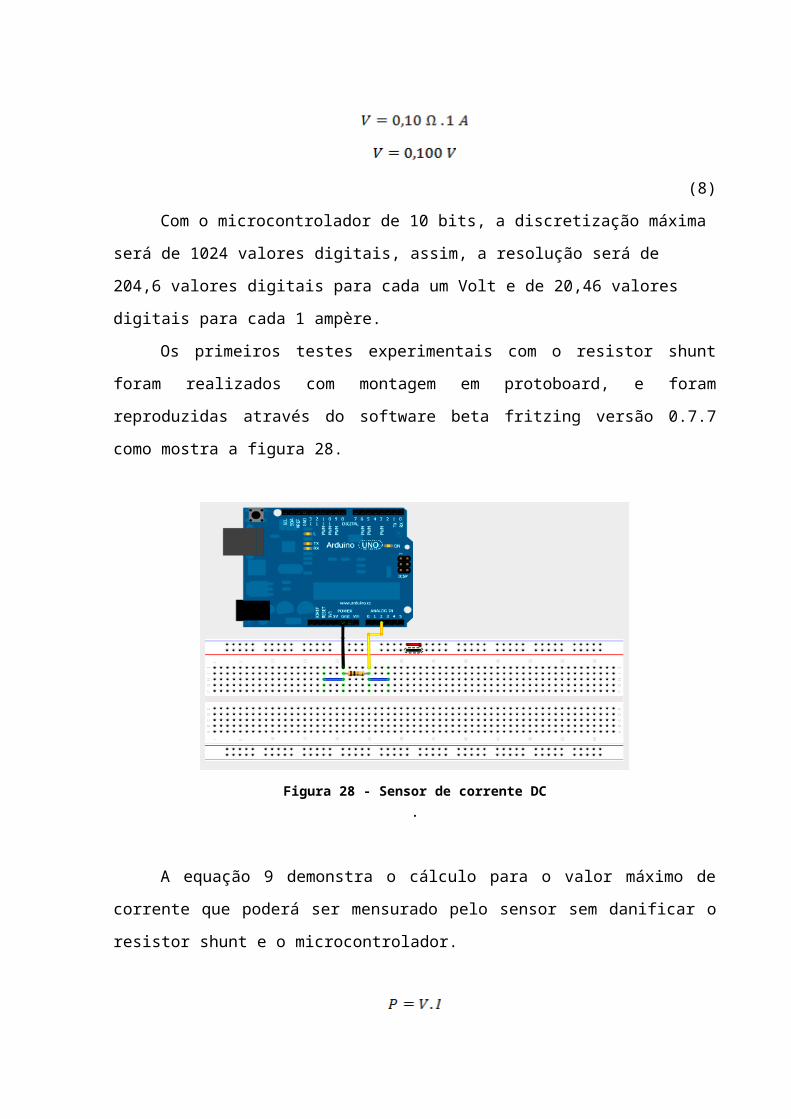
Figura 44 - Curva espectral do sensor de chama
Fonte: RFRobot, 2012.
Algumas informações relevantes fornecidas pelo fabricante rfrobot:
Alta sensibilidade do receptor IR;
Extremamente sensível a ondas entre 760nm a 1100nm;
Saída analógica;
Faixa de ângulo de detecção aproximadamente 60 graus
Alimentação de 0 a 15 V DC;
Detecção em até 100 cm.
Maiores informações poderão ser consultadas através da folha de dados do
componente incluso no anexo C ou pelo site do fabricante www.dfrobot.com
Os primeiros testes experimentais com o sensor de chamas foram realizados
com a sua ligação diretamente ao microcontrolador e as imagens foram
reproduzidas através do software beta fritzing versão 0.7.7 como mostra a figura 45.
Figura 45 - Sensor de chama
No protótipo, o sensor de chama ficará localizado entre o UPS e o motor que
simulará o gerador e a uma distância de aproximadamente 30 cm de cada um dos
equipamentos com um ângulo de abertura de aproximadamente 45 graus.

3.5 Implementação do Software
Neste item serão descritos os procedimentos adotados para a implementação
do software base para o protótipo e sua referida complementação para poder ser
consultado pela WEB.
3.5.1 Software Base
O código deste protótipo implementado e executado no microcontrolador
Arduino visa efetuar a leitura de cada um dos sensores do sistema, estabelecer uma
conexão serial com o computador e enviar a cada tempo determinado os valores já
condicionados para poderem ser visualizados através do serial monitor do IDE do
próprio microcontrolador.
O código fonte criado para este protótipo consiste de algumas funções, sendo
a principal Setup, e uma função para cada um dos sensores. A função setup é
executada somente uma vez durante a execução do código e é a responsável por
iniciar a conexão serial com o computador através de uma porta USB e fixar os
parâmetros estruturais adotados para o programa.A função loop, que será executada
várias vezes durante a execução do código, invoca as funções dos respectivos
sensores efetuando suas leituras e disponibilizando os resultados para o usuário
através do serial monitor
A figura 46 ilustra a estrutura básica das funções adotadas para a
implementação do programa.
Figura 46 - Estrutura básica do programa do protótipo
Em todas as funções do programa, foram implementados os cálculos para a
conversão dos valores analógicos para os digitais.
O código fonte base completo encontra-se disponível no apêndice B, no final
deste trabalho.
3.5.2 Software Visual
Para que as informações fornecidas pelos sensores pudessem ser
visualizadas pela Internet ou por uma rede local, foi utilizado a placa Arduino Shield
Ethernet e o código base foi complementado com alguns comandos em HTML para
a criação da interface gráfica.
Para iniciar a comunicação entre o arduino, o shield ethernet e o roteador, foi
necessário incrementar no cabeçalho do programa o número do MAC Address do
shield ethernet, a faixa de IP do roteador, o número da porta utilizada, além de
inicializá-los na função setup, conforme mostra a figura 47.
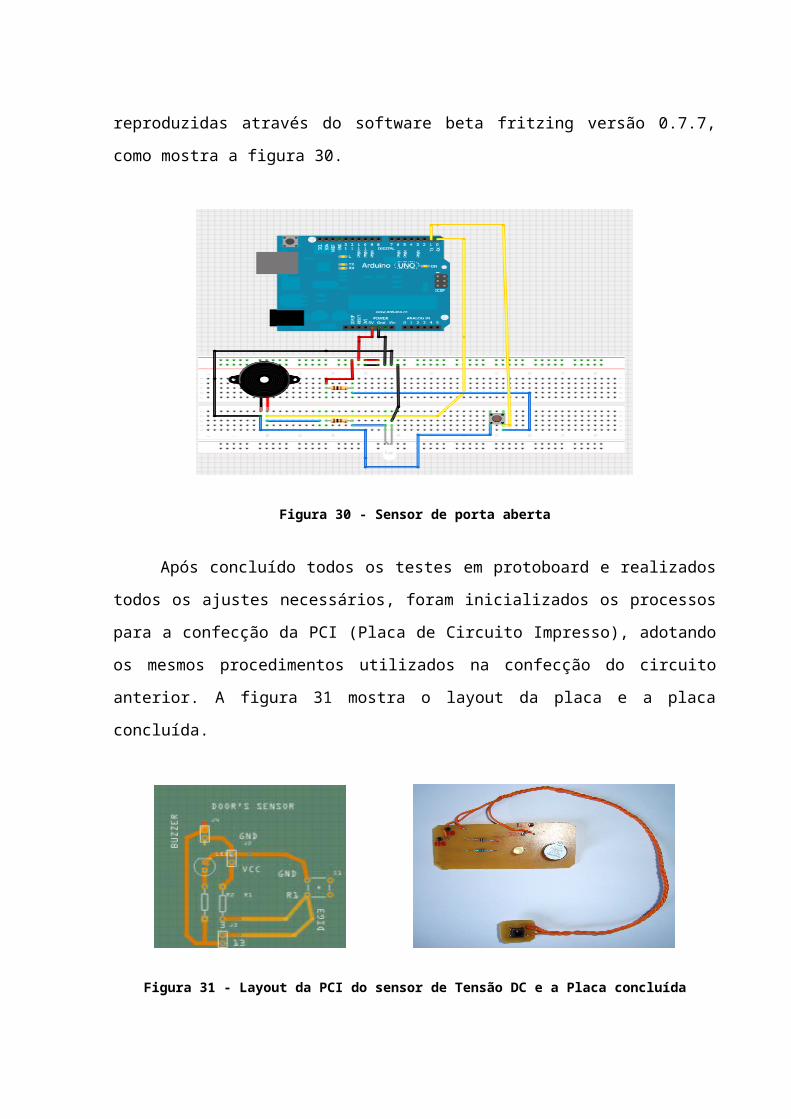
Figura 47 - Declaração dos dados para inicialização da comunicação
Após inicializado o servidor WEB, o software base foi complementado com
comandos em HTML para a criação da interface gráfica, conforme ilustrado pela
figura 48. Para acessá-la, basta o usuário digitar o IP declarado no cabeçalho do
programa em um browser da internet para iniciar a conexão.
Figura 48 - Interface gráfica para acesso pela internet ou rede interna
4 TESTES E RESULTADOS EXPERIMENTAIS
Neste capítulo serão demonstrados na primeira parte os resultados dos testes
funcionais de cada um dos sensores, e por fim, de todo o sistema.
Na segunda parte deste capítulo, serão realizados testes de precisão e
cálculo dos erros dos módulos sensores que executam medições, com intuito de
assegurar a confiabilidade e determinar a tolerância das informações que serão
repassadas ao usuário.
4.1 Teste de funcionalidade dos sensores
4.1.1 Sensor de Temperatura
O teste de funcionalidade do sensor de temperatura foi realizado com
sucesso. O microcontrolador e o sensor foram montados e expostos à temperatura
ambiente. Os valores de temperatura, em graus Celsius, foram mostrados através
do serial monitor do IDE Arduíno 1.0.1, conforme mostrado na figura 49.
Figura 49 - Tela do serial monitor do IDE Arduíno 1.0.1
4.1.2 Sensor de Tensão DC
O teste de funcionalidade do sensor de tensão contínua foi realizado com
sucesso. O microcontrolador e o sensor foram montados para a medição de 2 pilhas
AA, cada uma de 1,5 volts totalizando 3 volts. Os valores da tensão, em volts (V),
foram mostrados através do serial monitor do IDE Arduíno 1.0.1, conforme mostrado
na figura 50.
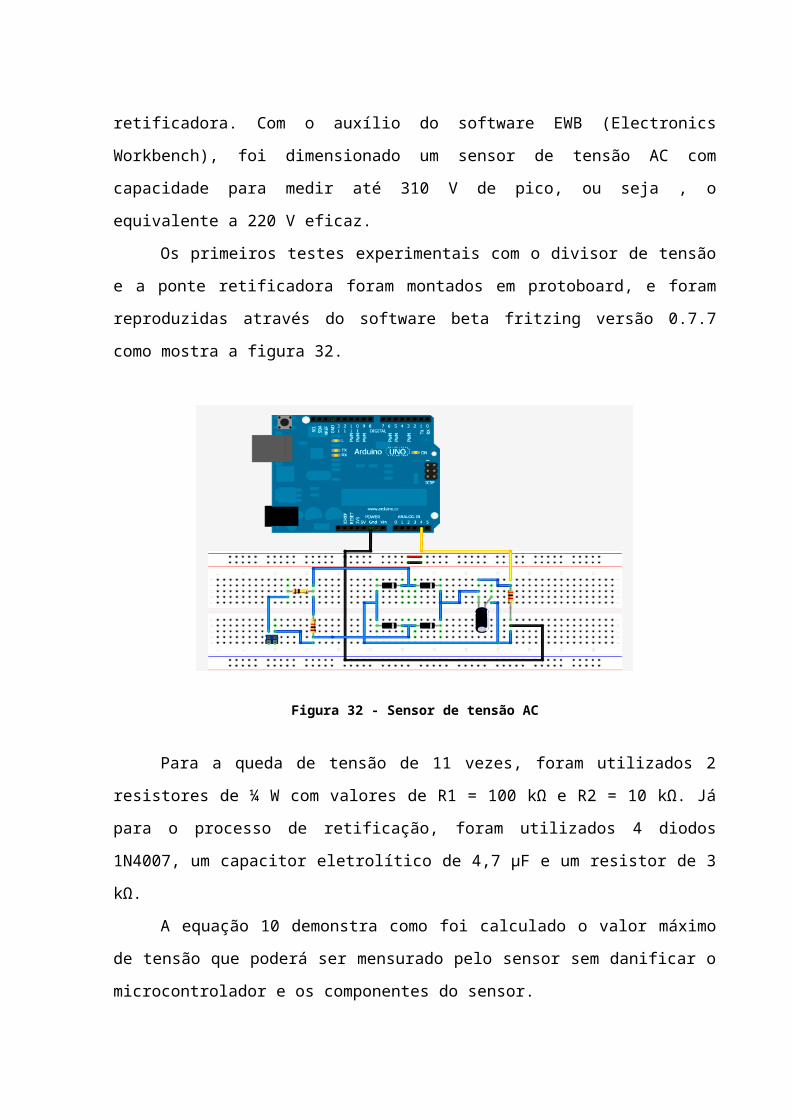
Figura 50 - Tela do serial monitor do IDE Arduíno 1.0.1
4.1.3 Sensor de Corrente DC
O sensor de corrente DC apresentou pequenas variações nos valores
apresentados, porém, ele será melhor analisado nos testes de precisão. Para a
medição, o microcontrolador e o sensor foram montados e um cooler de 12 Volts
com corrente de 0,20 Ampères foi utilizado como carga. Os valores da corrente, em
ampères (A), foram mostrados através do serial monitor do IDE Arduíno 1.0.1,
conforme mostrado na figura 51.
Figura 51 - Tela do serial monitor do IDE Arduíno 1.0.1
4.1.4 Sensor de Porta aberta
O teste de funcionalidade do sensor de porta aberta foi realizado com
sucesso. O microcontrolador e o sensor foram montados e foram executadas
simulações de abertura e fechamento ao apertar a chave táctil, esta que será
instalada no batente porta. As mudanças de status foram mostrados através do
serial monitor do IDE Arduíno 1.0.1, conforme mostrado na figura 52.
Figura 52 - Tela do serial monitor do IDE Arduíno 1.0.1
4.1.5 Sensor de Tensão AC
O teste de funcionalidade do sensor de tensão alternada foi realizado com
sucesso. O microcontrolador e o sensor foram montados para a medição de uma
tomada residencial de 127 volts. Os valores da tensão, em volts (V), foram
mostrados através do serial monitor do IDE Arduíno 1.0.1, conforme mostrado na
figura 53.

Figura 53 - Tela do serial monitor do IDE Arduíno 1.0.1
4.1.6 Sensor de Corrente AC
O sensor de corrente alternada apresentou variações nos valores
apresentados, porém, ele será melhor analisado nos testes de precisão. O
microcontrolador e o sensor foram montados para a medição da corrente elétrica de
uma lâmpada incandescente de 100 Watts (W) de potência nominal e alimentada
com 127 V nominais. Os valores da corrente elétrica em ampères (A) e a tensão
quiscente foram mostrados através do serial monitor do IDE Arduíno 1.0.1, conforme
mostrado na figura 54.
Figura 54 - Tela do serial monitor do IDE Arduíno 1.0.1
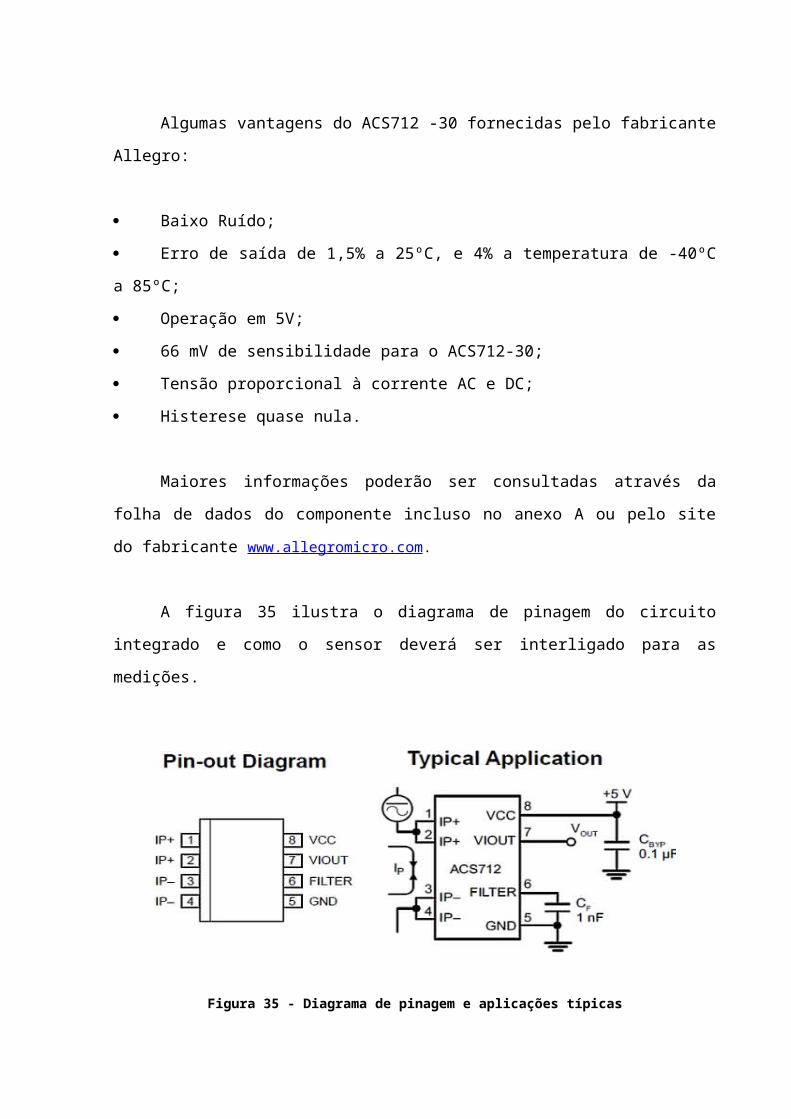
4.1.7 Sensor de RPM
O teste de funcionalidade do sensor de RPM foi realizado com sucesso. O
microcontrolador e o sensor foram montados para a medição do número de rotações
de um cooler de 7 pás. Os números de rotações, em RPM, foram mostrados através
do serial monitor do IDE Arduíno 1.0.1, conforme mostrado na figura 55.
Figura 55 - Tela do serial monitor do IDE Arduíno 1.0.1
4.1.8 Sensor de Nível
O teste de funcionalidade do sensor de nível de combustível foi realizado com
sucesso. Mesmo apresentando uma variação de 2 centímetros na medição, o valor
encontra-se dentro das tolerâncias especificadas pelo fabricante. O microcontrolador
e o sensor ultrassônico foram montados para a medição de uma distância de 37
centímetros, conferido por uma trena. Os valores da distância, em centímetros,
foram mostrados através do serial monitor do IDE Arduíno 1.0.1, conforme mostrado
na figura 56.
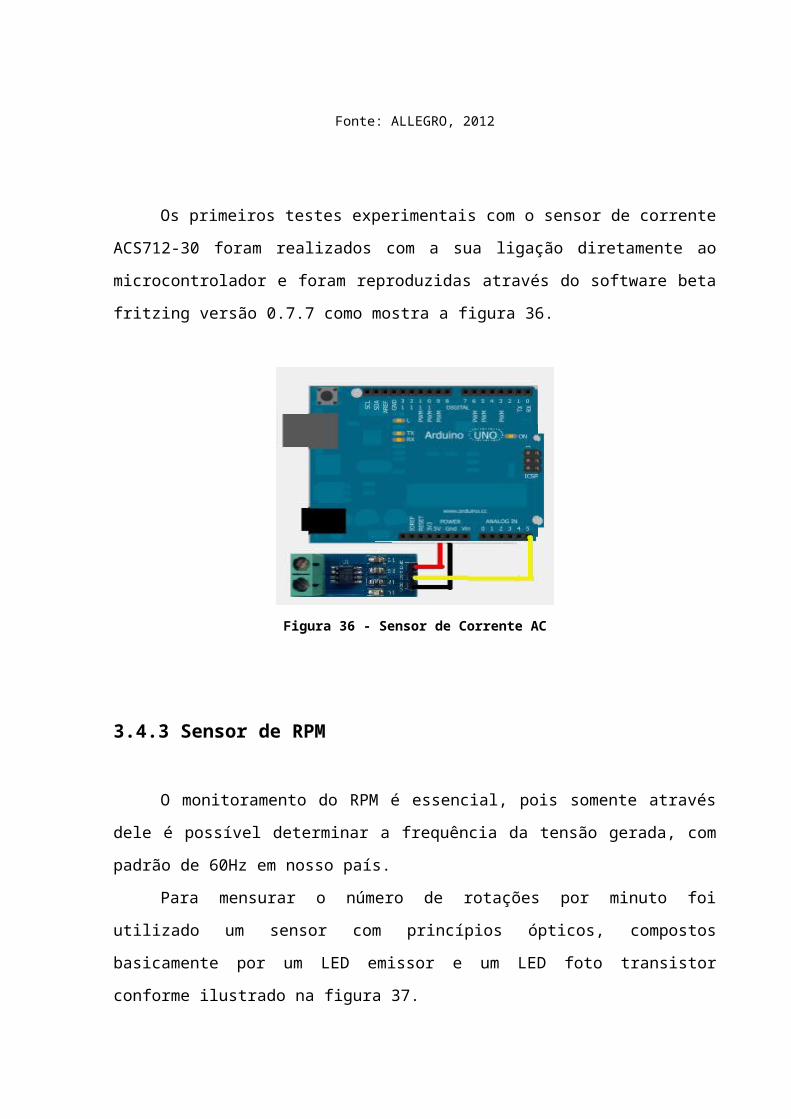
Figura 56 - Tela do serial monitor do IDE Arduíno 1.0.1
4.2 Teste de precisão dos sensores
No próximo item serão mostrados através de tabelas os valores encontrados
nos testes de precisão e os valores percentuais de erro relativo dos sensores de
temperatura, tensão DC, corrente DC, tensão AC, corrente AC, RPM e nível de
combustível.
Para a execução destes testes foram utilizados instrumentos e equipamentos
aferidos e em perfeitas condições de uso.
O cálculo do percentual de erro relativo deu-se através da equação 12
(12)
Onde:
é o erro relativo;
é o erro;
é o valor esperado.
Para se obter o percentual do erro relativo encontrado, aplica se a equação 13.
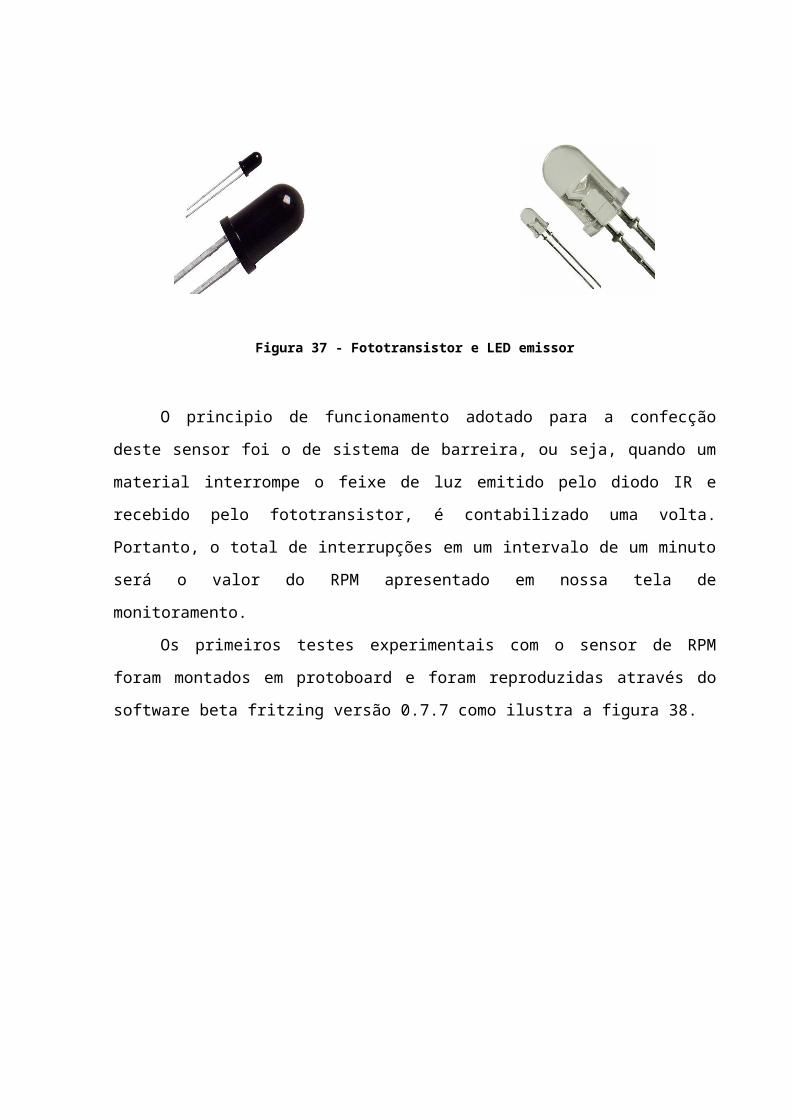
(13)
Onde:
P é o percentual do erro;
é o erro relativo;
100 é o fator multiplicativo de porcentagem.
4.2.1 Sensor de Temperatura
Para a verificação da precisão deste sensor, foi utilizado um multímetro
modelo HK-M69 da marca Hikary com capacidade de medição de temperatura que
utiliza um termopar tipo K com resolução de precisão de 1 ºC.
Foram efetuadas medições da temperatura da água a 0ºC, 25º C, 50ºC, 75ºC
e 100ºC.A tabela 2 mostra os valores medidos com o multímetro e com o sensor de
temperatura, além do percentual do erro relativo.
Tabela 2 - Valores encontrados com as medições e o percentual do erro relativo.
TESTE DE PRECISÃO DO SENSOR DE TEMPERATURA
Temperatura da águaTemperatura LM
35 (ºC)Temperatura com
multímetro (ºC)Erro percentual
(%)
0ºC 0ºC 0ºC 025ºC 25ºC 25ºC 050ºC 50ºC 50ºC 075ºC 76ºC 75ºC 1,33100ºC 99ºC 100ºC 1
4.2.2 Sensor de Tensão DC
Para a verificação da precisão deste sensor, foi utilizado um multímetro
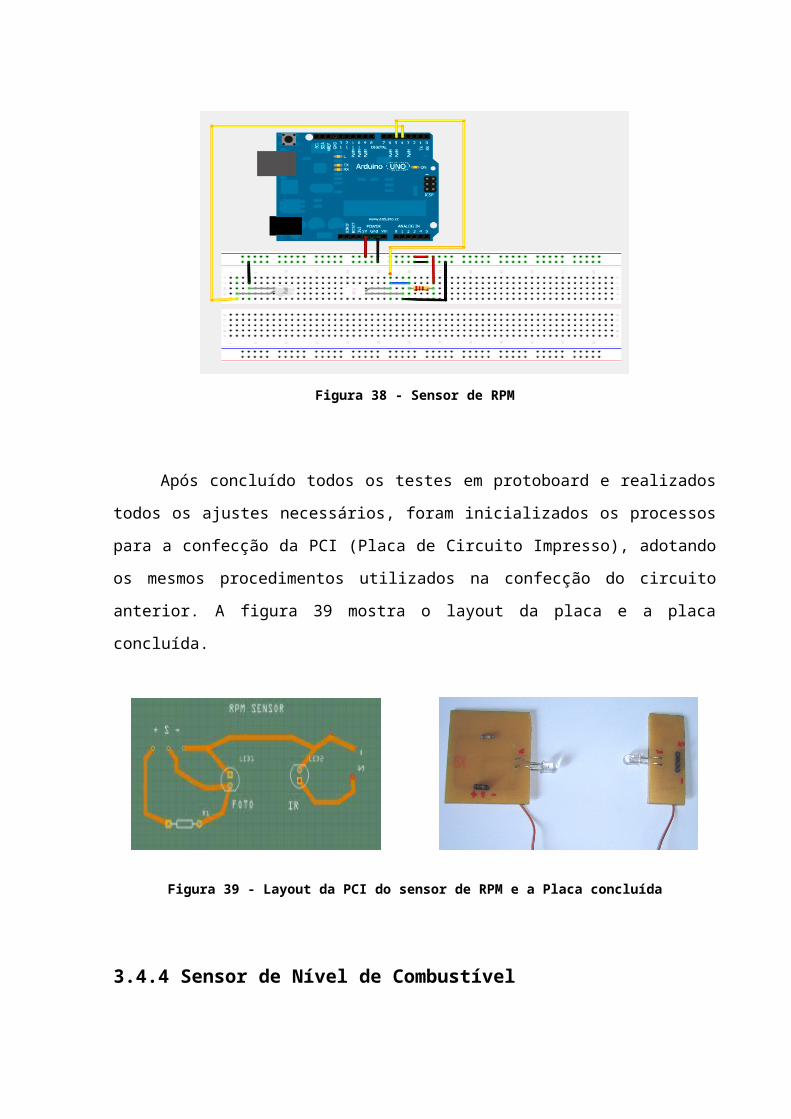
modelo ET-2030A da marca Minipa com capacidade de medição de tensão DC e
uma fonte de alimentação DC modelo MPS-3003 também da marca Minipa.
Foram medidos pelo sensor e pelo multímetro 5 diferentes valores de tensão
DC fornecidos pela fonte ajustável. A tabela 3 mostra os valores medidos com o
multímetro e com sensor de tensão, além do percentual do erro relativo.
Tabela 3 - Valores encontrados com as medições e o percentual do erro relativo.
TESTE DE PRECISÃO DO SENSOR DE TENSÃO DC
Tensão da Fonte variávelTensão
Sensor DC (V)
Tensão com Multímetro (V)
Erro percentual (%)
1 V 1 V 1 V 05 V 5,05 V 5 V 110 V 10,05 V 10 V 0,520 V 19,90 V 20 V 0,530 V 30,19 V 30 V 0,63
4.2.3 Sensor de Corrente DC
Para a verificação da precisão deste sensor, foi utilizado um multímetro
modelo ET-2030A da marca Minipa com capacidade de medição de corrente DC e
uma fonte de alimentação DC modelo MPS-3003 também da marca Minipa.
Foram medidos pelo sensor e pelo multímetro 5 diferentes valores de corrente
DC fornecidos pela fonte ajustável. A tabela 4 mostra os valores medidos com o
multímetro e com sensor de corrente, além do percentual do erro relativo.
Tabela 4 - Valores encontrados com as medições e o percentual do erro relativo.
TESTE DE PRECISÃO DO SENSOR DE CORRENTE DC
Corrente da Fonte variávelSensor de
Corrente DC (A)
Corrente com Multímetro (A)
Erro percentual (%)
0,5 A 0,45 A 0,48 A 101,0 A 1,02 A 1,02 A 21,5 A 1,6 A 1,51 A 6,662,0 A 2,2 A 2,05 A 103,0 A 3,18 A 3,09 A 6
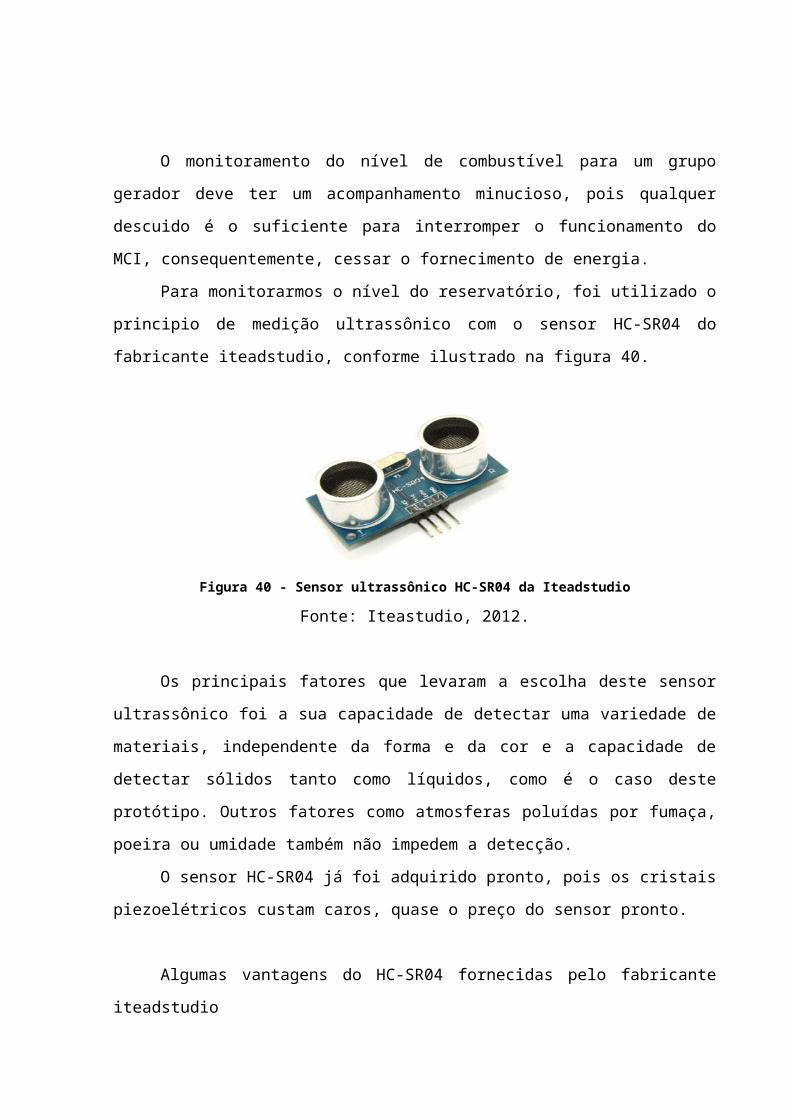
4.2.4 Sensor de Tensão AC
Para a verificação da precisão deste sensor, foi utilizado um multímetro
modelo ET-2030A da marca Minipa com capacidade de medição de tensão AC.
Foram medidos pelo sensor e pelo multímetro tensões de 12,7 V, 127 V e 220
V, todas as tensões de valores nominais e eficazes fornecidas por um nobreak. A
tabela 5 mostra os valores medidos com o multímetro e com sensor de tensão, além
do percentual do erro relativo.
Tabela 5 - Valores encontrados com as medições e o percentual do erro relativo.
TESTE DE PRECISÃO DO SENSOR DE TENSÃO AC
Tensão Alternada Sensor de
Tensão AC (V)Tensão com Multímetro
(V)Erro percentual
(%)
12,7 V 12,4 V 12,6 V 1,58127 V 128, 4 V 127,4 V 0,78220 V 222,1 V 221,4 V 0,31
4.2.5 Sensor de Corrente AC
Para a verificação da precisão deste sensor, foi utilizado um multímetro
modelo ET-2030A da marca Minipa com capacidade de medição de corrente AC.
Foram medidos pelo sensor e pelo multímetro as correntes elétricas de 3
lâmpadas, 1 fluorescente e 2 incandescentes, com potências de 15W, 40W e 100W,
todas alimentadas com uma tensão nominal e eficaz de 127V fornecidas por um
nobreak. A tabela 6 mostra os valores medidos com o multímetro e com sensor de
corrente alternada, além do percentual do erro relativo.
Tabela 6 - Valores encontrados com as medições e o percentual do erro relativo.
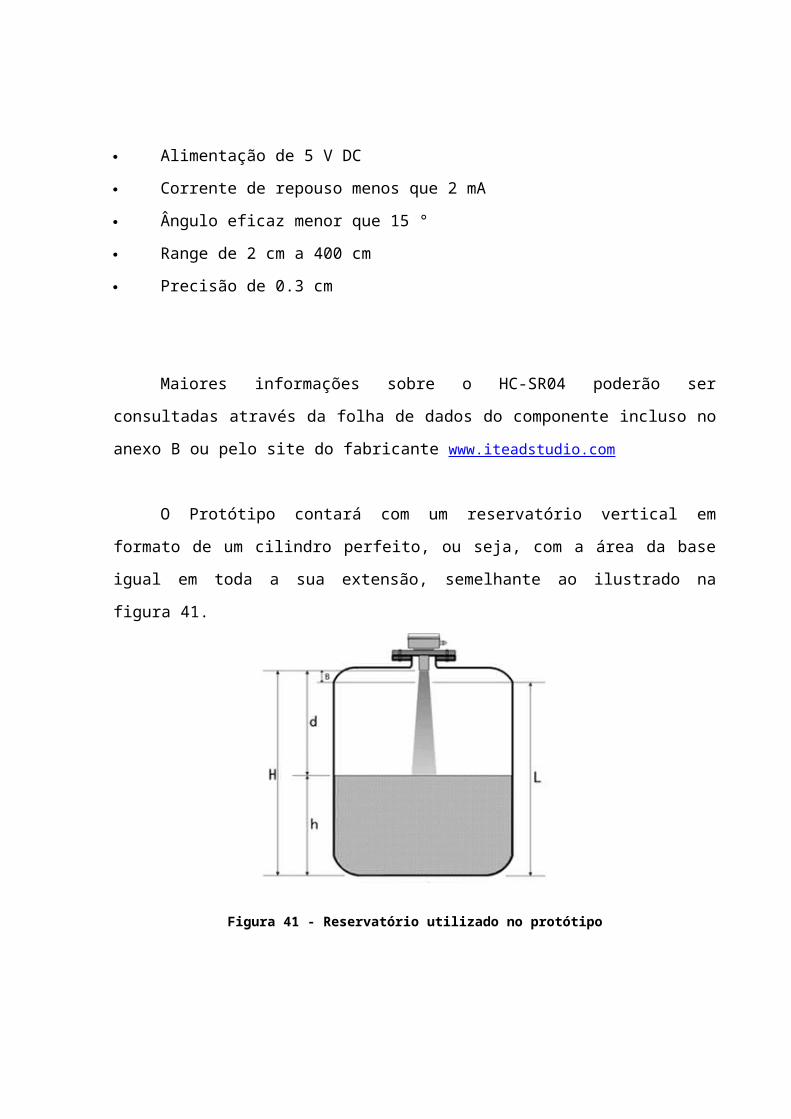
TESTE DE PRECISÃO DO SENSOR DE CORRENTE AC
Corrente CalculadaSensor de
Corrente AC (A)
Corrente com Multímetro (A)
Erro percentual (%)
0,118 A 0,084 A 0,103 A 18,440,314 A 0,261 A 0,296 A 11,820,787 A 0,652 A 0,737 A 11,53
4.2.6 Sensor de RPM
Para a verificação da precisão deste sensor, foi utilizado um Tacógrafo modelo
DT-2234C+ sem especificação de fabricante, com capacidade de medição de
rotações em RPM com resolução de 0,1 RPM e precisão de 0,05%.
Foram medidos pelo sensor e pelo tacógrafo 3 diferentes rotações em RPM
de um cooler de 7 pás. A tabela 7 mostra os valores medidos com o tacógrafo e com
sensor de RPM, além do percentual do erro relativo.
Tabela 7 - Valores encontrados com as medições e o percentual do erro relativo.
TESTE DE PRECISÃO DO SENSOR DE RPM
Medição pelo tacógrafo em RPMSensor de
RPMErro percentual (%)
822 841 2,311641 1657 0,962100 2122 1,04
4.2.7 Sensor de Nível de combustível
Para a verificação da precisão deste sensor, foram efetuadas 5 diferentes
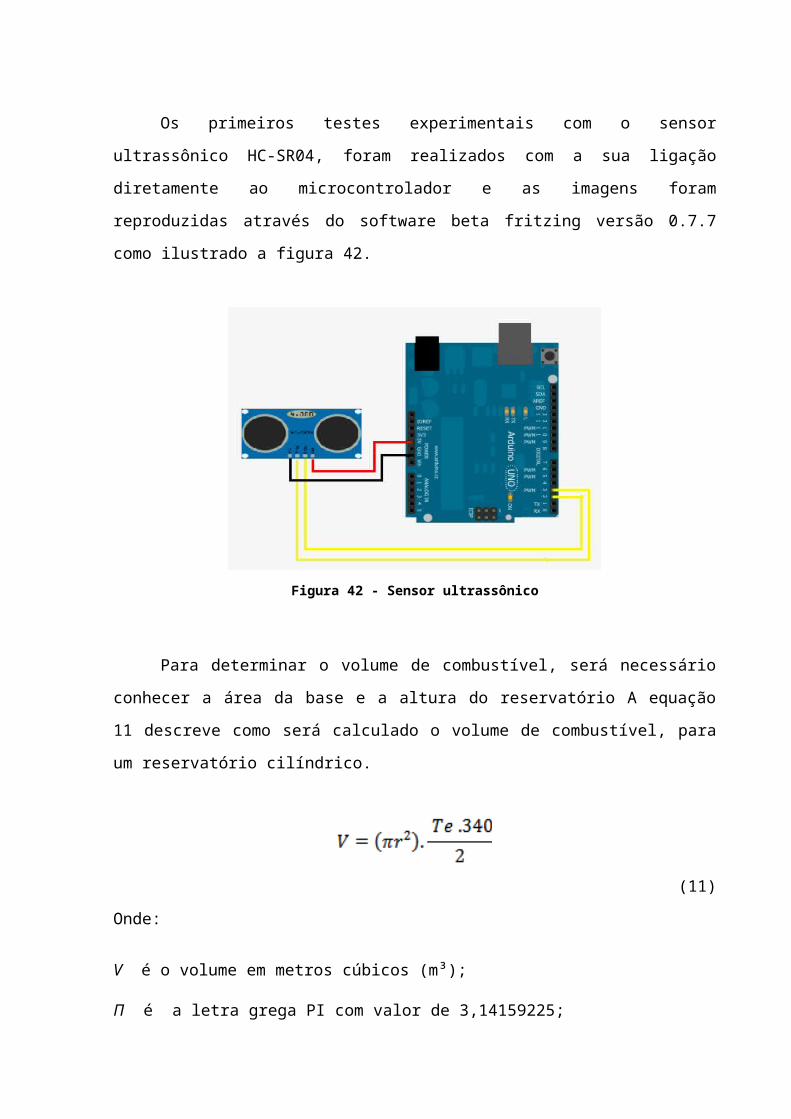
medições do volume de água contida em um recipiente de 8 litros com marcações
de 0,5 litros. A tabela 8 mostra os valores medidos com o sensor de nível de
combustível, além do percentual do erro relativo.
Tabela 8 - Valores encontrados com as medições e o percentual do erro relativo.
TESTE DE PRECISÃO DO SENSOR DE NÍVEL COMBUSTÍVEL
Volume de água no reservatórioSensor de
NívelErro percentual
(%)
0,5 l 0,5 l 01,0 l 1,2 l 52,0 l 2,3 l 2,54,0 l 4,3 l 58,0 l 8,3 l 3,75
4.3 Gráficos do teste de precisão
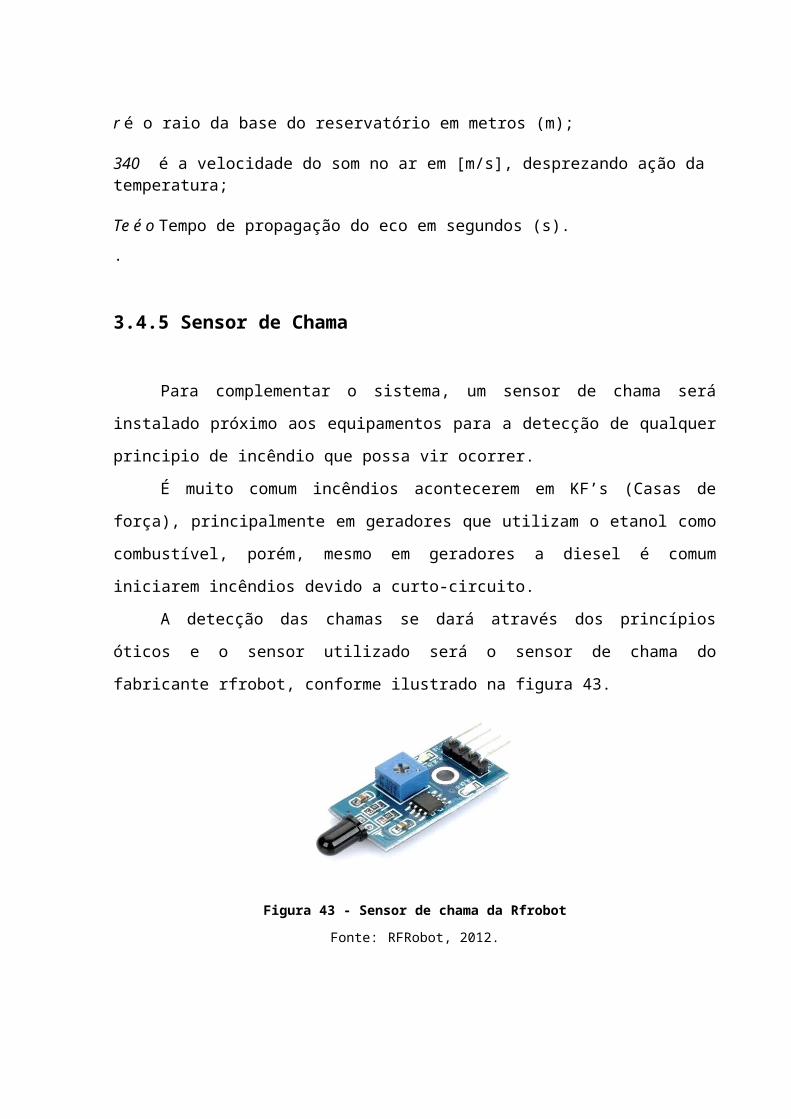
25 25
50 50
76 75
99 100
0
20
40
60
80
100
25ºC 50ºC 75ºC 100ºC
TESTE DE PRECISÃO DO SENSOR DE TEMPERATURA
Temperatura LM 35 (ºC) Temperatura com multímetro (ºC)
Gráfico 1 - Teste de Precisão do Sensor de Temperatura
1 15,05 5
10,05 10
19,9 20
30,19 30
0
5
10
15
20
25
30
35
1 V 5 V 10 V 20 V 30 V
TESTE DE PRECISÃO DO SENSOR DE TENSÃO DC
Tensão Sensor DC (V) Tensão com Multímetro (V)
Gráfico 2 - Teste de Precisão do Sensor de Tensão DC
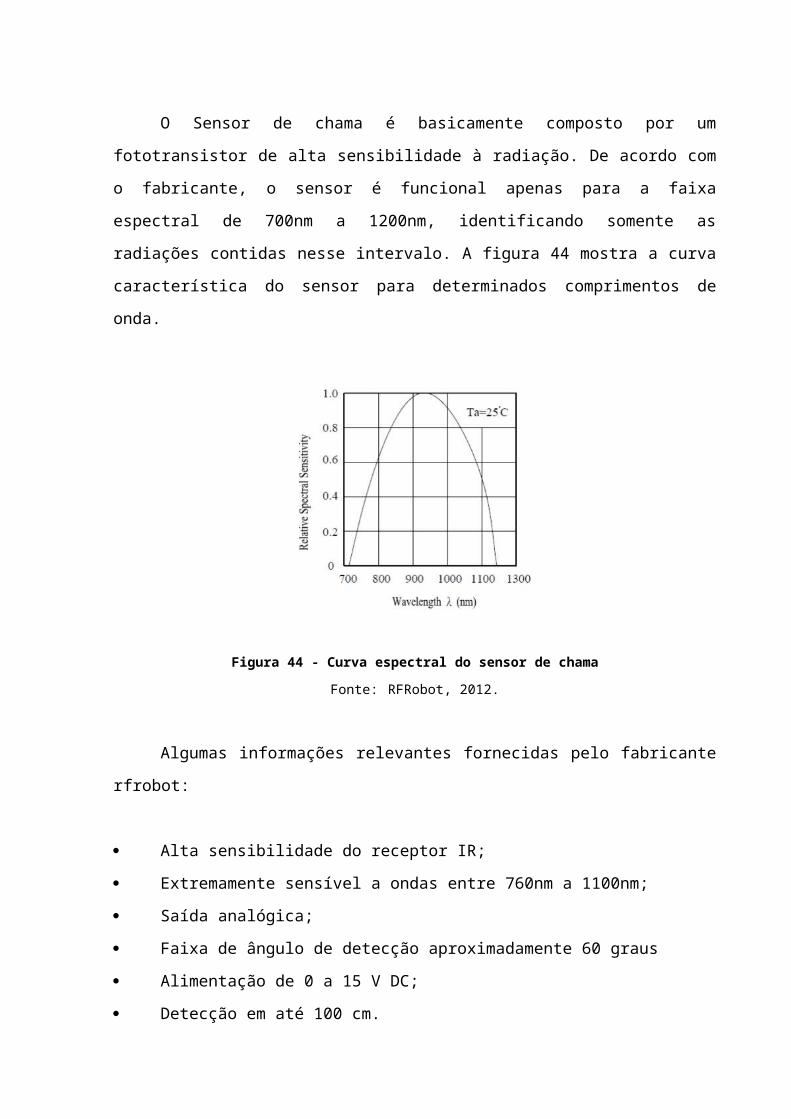
0,45 0,48
1,02 1,02
1,6 1,51
2,2 2,05
3,18 3,09
0
0,5
1
1,5
2
2,5
3
3,5
1 2 3 4 5
TESTE DE PRECISÃO DO SENSOR DE CORRENTE DC
Sensor de Corrente DC (A) Corrente com Multímetro (A)
Gráfico 3 - Teste de Precisão do Sensor de Corrente DC
12,4 12,6
128,4 127,4
222,1 221,4
0
50
100
150
200
250
1 2 3
TESTE DE PRECISÃO DO SENSOR DE TENSÃO AC
Sensor de Tensão AC (V) Tensão com Multímetro (V)
Gráfico 4 - Teste de Precisão do Sensor de Tensão AC
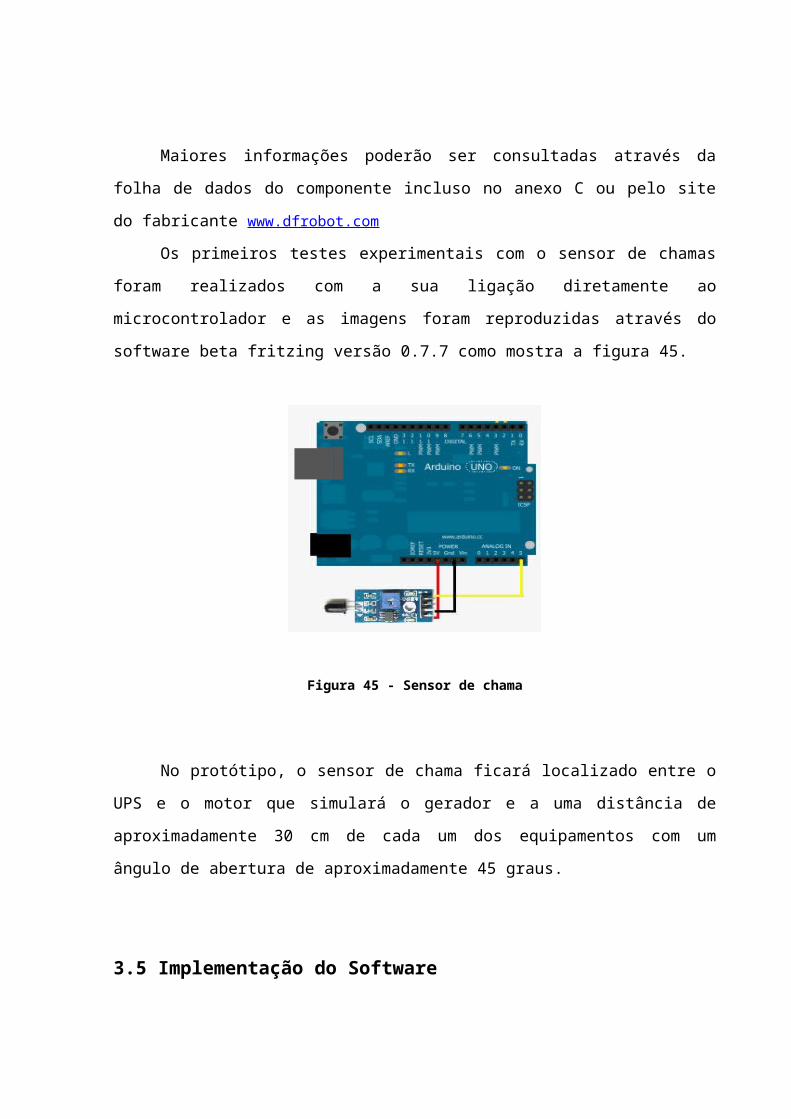
0,084 0,103
0,261 0,296
0,6520,737
0
0,2
0,4
0,6
0,8
1 2 3
TESTE DE PRECISÃO DO SENSOR DE CORRENTE AC
Sensor de Corrente AC (A) Corrente com Multímetro (A)
Gráfico 5 - Teste de Precisão do Sensor de Corente AC
822841
16411657
2100 2122
0
500
1000
1500
2000
2500
1 2 3
TESTE DE PRECISÃO DO SENSOR DE RPM
Medição pelo tacógrafo Sensor de RPM
'
Gráfico 6 - Teste de Precisão do Sensor de RPM
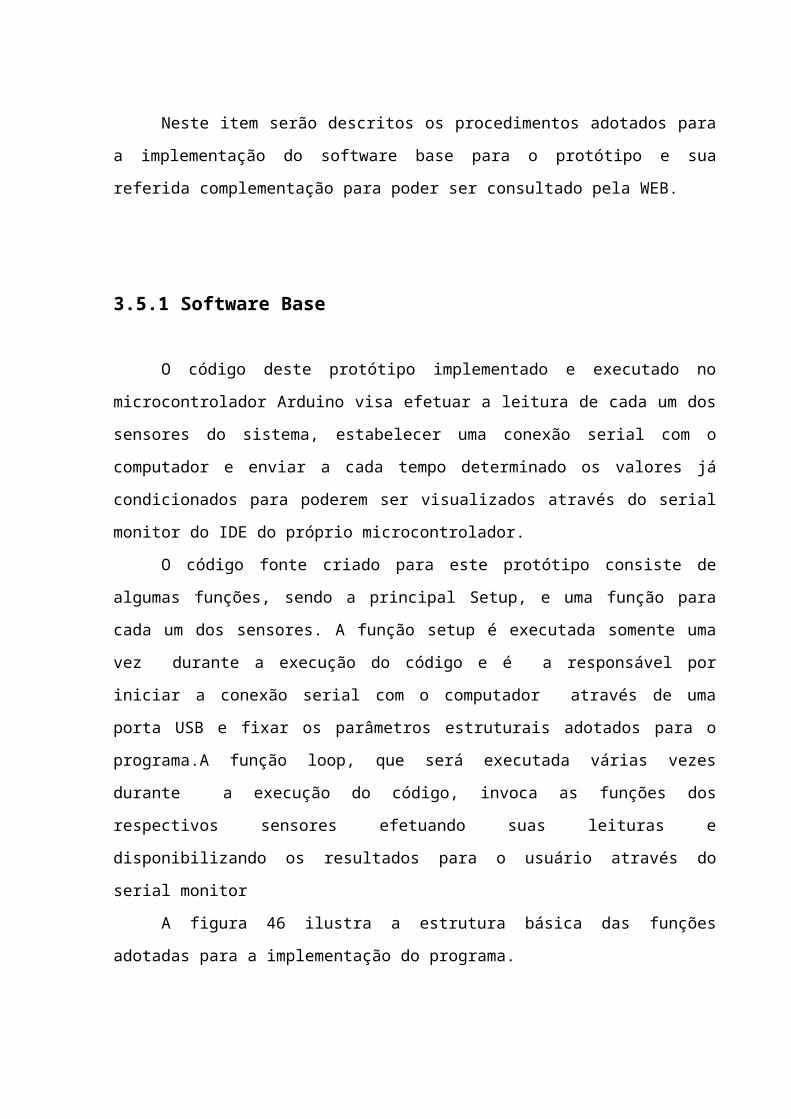
0,5 0,5 1,0 1,052,0 2,05
4,0 4,2
8,0 8,3
0,0
2,0
4,0
6,0
8,0
10,0
TESTE DE PRECISÃO DO SENSOR DE NÍVEL DE COMBUSTÍVEL
Volume de água no reservatório Sensor de nível
Gráfico 7 - Teste de Precisão do Sensor de nível de Combustível

5 CONCLUSÃO
Para o desenvolvimento deste protótipo, foram realizados estudos buscando
levantar todas as necessidades a serem supridas, o que deu inicio ao
dimensionamento do trabalho. A implementação dos hardwares e softwares foram
realizadas com base nestes estudos e todas as etapas do trabalho atingiram as
metas acadêmicas propostas.
O protótipo apresentou excelentes resultados e mostrou ser eficaz para o
monitoramento dos sistemas de energia de emergência, o que tornará possível a
sua futura aplicação no aeroporto campo de marte para a realização de testes reais
em campo, visando aperfeiçoar e complementar suas necessidades antes de torná-
lo um produto comercial.
O projeto além de ter apresentado um baixo custo de fabricação, ao ser
comparado com sistemas comerciais já existentes, também apresentou ótimos
resultados nos testes pelo qual foi submetido, o que permitirá a sua futura
complementação, possibilitando assim, assegurar a mesma qualidade e
confiabilidade de seus concorrentes.
Profissionalmente, a elaboração deste protótipo iniciado do zero, agregou
grandes conhecimentos e exigiu a aplicação de tudo o que já havíamos aprendido
durante a nossa formação. Da elaboração da proposta até a conclusão e entrega
final do trabalho, muitos estudos, pesquisas e desafios foram superados, o que fez
solidificar imensuravelmente a nossa formação profissional.
5.1 Melhorias e propostas futuras
Algumas modificações serão estudadas com a finalidade de corrigir e aprimorar o
desempenho e a segurança do sistema, tais como:
a) Utilizar um transformador abaixador de tensão e um sistema de proteção com
fusíveis e diodo zenner a fim de evitar possíveis danos ao sensor de tensão AC por
picos de energia
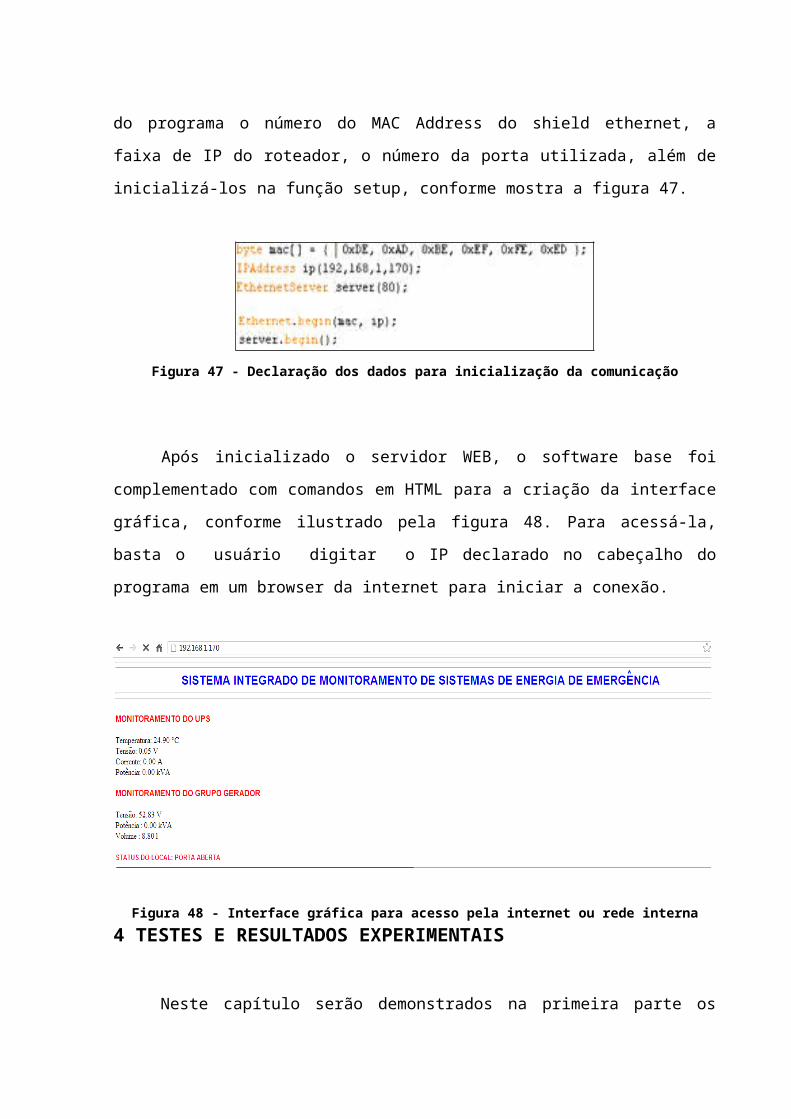
b) Utilizar um resistor shunt de menor valor ou um amplificador operacional a fim de
aumentar a resolução de precisão do sensor de corrente DC
c) Utilizar um sensor ultrassônico blindado a fim de aumentar a confiabilidade e o
tempo de vida útil para ambientes úmidos
d) Criar um servidor Webclient ou instalar um Shield SMS para alertar os técnicos via
e-mail ou SMS sobre possíveis situações criticas no sistema
e) Utilizar o software LABVIEW da National Instruments para aprimorar o ambiente
gráfico de monitoramento
f) Utilizar a placa Zigbee para fazer a comunicação sem fio do grupo gerador e o
UPS para o shield Ethernet.
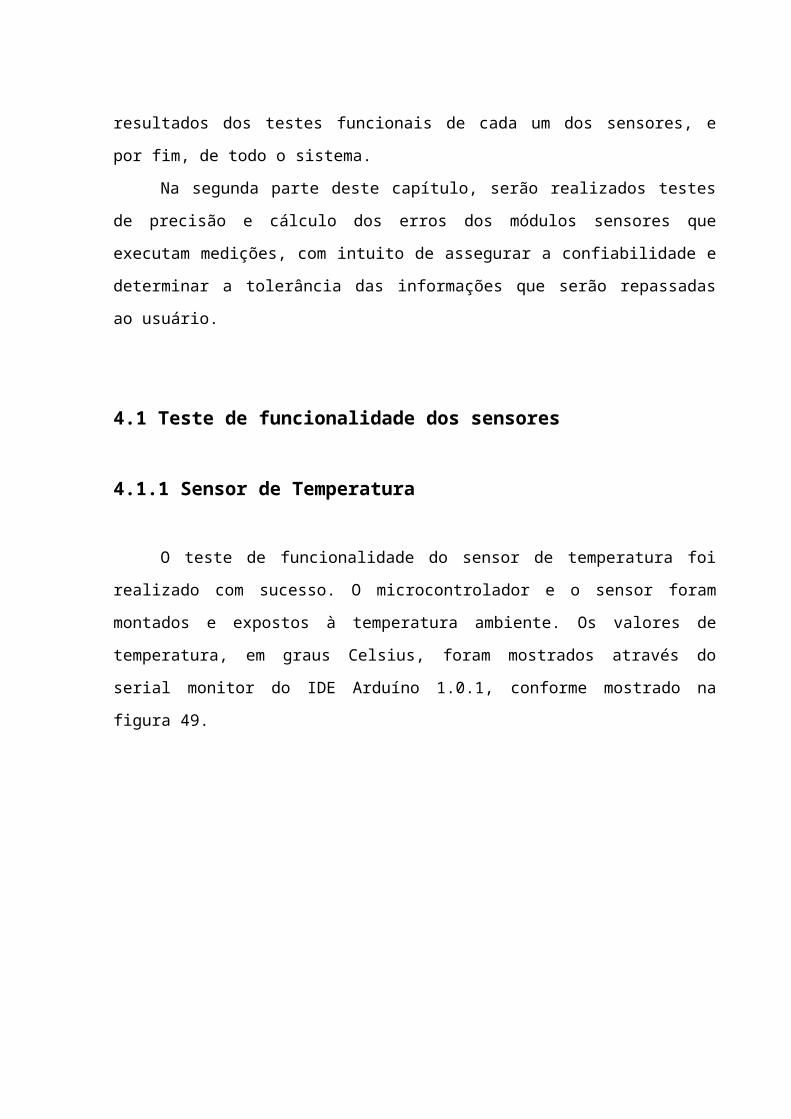
6 REFERÊNCIA BIBLIOGRÁFICA
ALLEGRO MICROSYSTEMS. Fully Integrated, Hall Effect –Based Linear
Current Sensor.Disponível
em:<http://www.allegromicro.com/en/Products/Part_Numbers/0712/0712.pdf>.Aces-
so em: 30. Jul. 2012
ATMEL. Folha de dados do microcontrolador Atmega328P.Disponível em:
<http://www.atmel.com/Images/doc8161.pdf>. Acesso em: 10. Mai. 2012.
COELHO, JP. Sensores. Disponível em:
<http://www.agarrados.com/w2box/data/LEEC_05-06/SI_apontamentos.pdf>. Acesso
em: 12. Jun. 2012.
FUENTES, R C, 2005. Apostila de automação industrial. Disponível em:
<http://w3.ufsm.br/fuentes/index_arquivos/CA03.pdf>. Acesso em: 20. Jun. 2012.
GUSTAVO WEBER. Microcontroladores. Disponível em:
<http://pessoal.utfpr.edu.br/gustavo/apostila_micro.pdf>. Acesso em: 05. Abr. 2012.
HIGASHI, 2006. Modelagem da bobina de Rogowski para medidas de pulsos de
corrente. Disponível
em:<http://www.pipe.ufpr.br/portal/defesas/dissertacao/105.pdf>. Acesso em: 12.
Mai. 2012.
HORENSTEIN M. N, 2006. Microeletrônica circuitos & dispositivos, Rio de
Janeiro. Editora Prentice-Hall do Brasil, 1996.
INFRAERO. Estatística de movimentos dos aeroportos do Brasil. Disponível em:
<http://www.infraero.gov.br/index.php/br/estatistica-dos-aeroportos.html>. Acesso
em: 20. Mar. 2012.

JOHNNY, 2009. Projeto de um sistema microcontrolado utilizando Internet
embarcada para monitoramento remoto em tempo real de temperatura e
disponibilização dos dados na WEB através de conexão de rede. Disponível
em: <ftp://ftp.engcomp.ufrn.br/publicacoes/ECC/ECC42.pdf>. Acesso em: 16. Ago.
2012.
JOSÉ CLÁUDIO. Princípios de funcionamento, instalação, operação e
manutenção de grupos geradores. Disponível em:
<http://www.joseclaudio.eng.br/grupos_geradores_1.html>. Acesso em: 30. Mar.
2012.
LIMA, 2009. Sistema remoto de monitoramento de UPS. Disponível em:
<http://www.engcomp.ufrn.br/publicacoes/TCC-2009-2-2.pdf>. Acesso em: 05. Abr.
2012.
PAULO MARIN, 2009. Monitoramento Remoto de Energia Elétrica. RTI – Redes
Telecomunicações e Instalações, São Paulo. Aranda Editora Técnica Cultural Ltda.
2009.
ROGGIA, 2010. UPS – Fontes Ininterruptas de Energia. Disponível em:
<http://www.ufsm.br/gepoc/sepoc/sepoc2010/progpara_arquivos/ApostilaUPSSEPO2
010.pdf>. Acesso em: 16. Ago. 2012.
TEXAS INSTRUMENT. Folha de dados do LM-35.Disponível em:
<http://www.ti.com/product/lm35>.Acesso em 15. Jul. 2012
THOMAZINI, Daniel.ALBUQUERQUE, Pedro U. B. Sensores Industriais –
Fundamentos e Aplicações, São Paulo.Editora Érica. 5ª ed. 2005.
TROWLER, D.; WHITAKER, 2008. Bi-Directional Inverter and Energy Storage
System. Disponível em:
<http://www.omapsw.com/corp/docs/landing/universityprogram/arkansas.pdf>.
Acesso em: 12. Jun. 2012.
WIKIPÉDIA. Divisor de Tensão. Disponível em:
<http://pt.wikipedia.org/wiki/Divisor_de_tens%C3%A3o>. Acesso em: 19. Jun. 2012.
7 APÊNDICES
7.1 Apêndice A
O circuito esquemático do protótipo apresentado ilustra as ligações elétricas
executadas em cada um dos sensores à interface ethernet

7.2 Apêndice B
O programa em linguagem C apresentado refere-se ao código base utilizado
neste protótipo





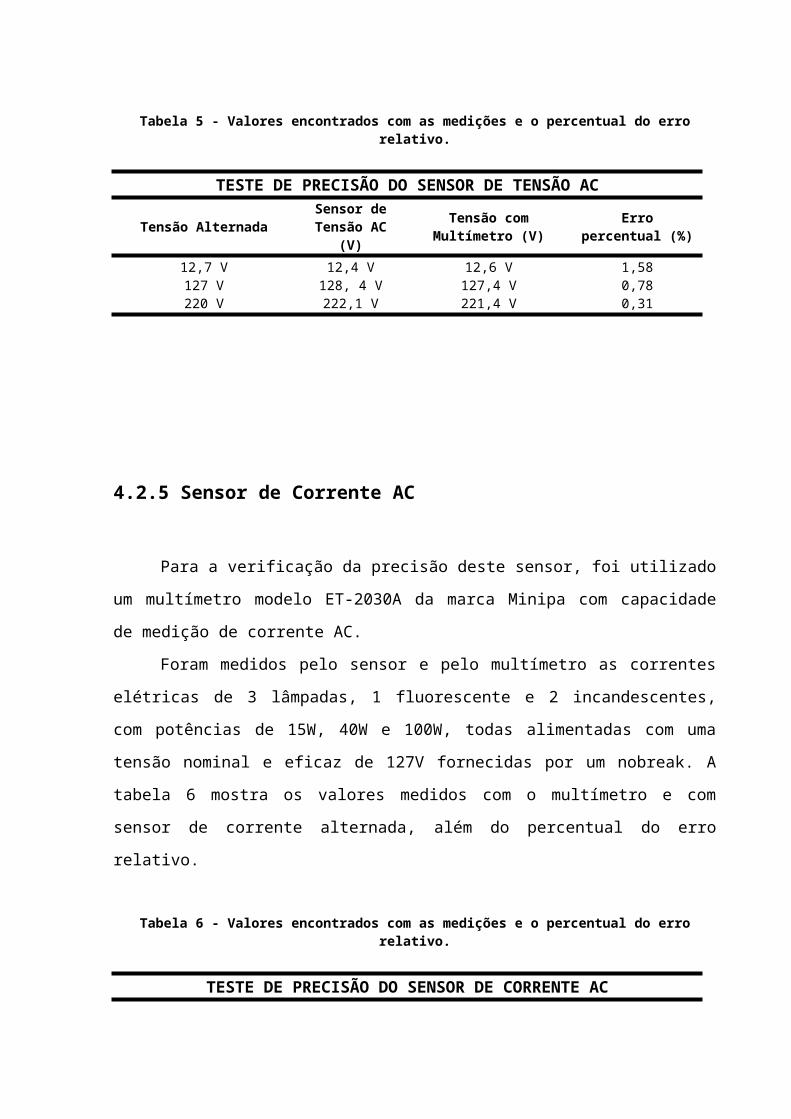
8 ANEXOS
8.1 Anexo A
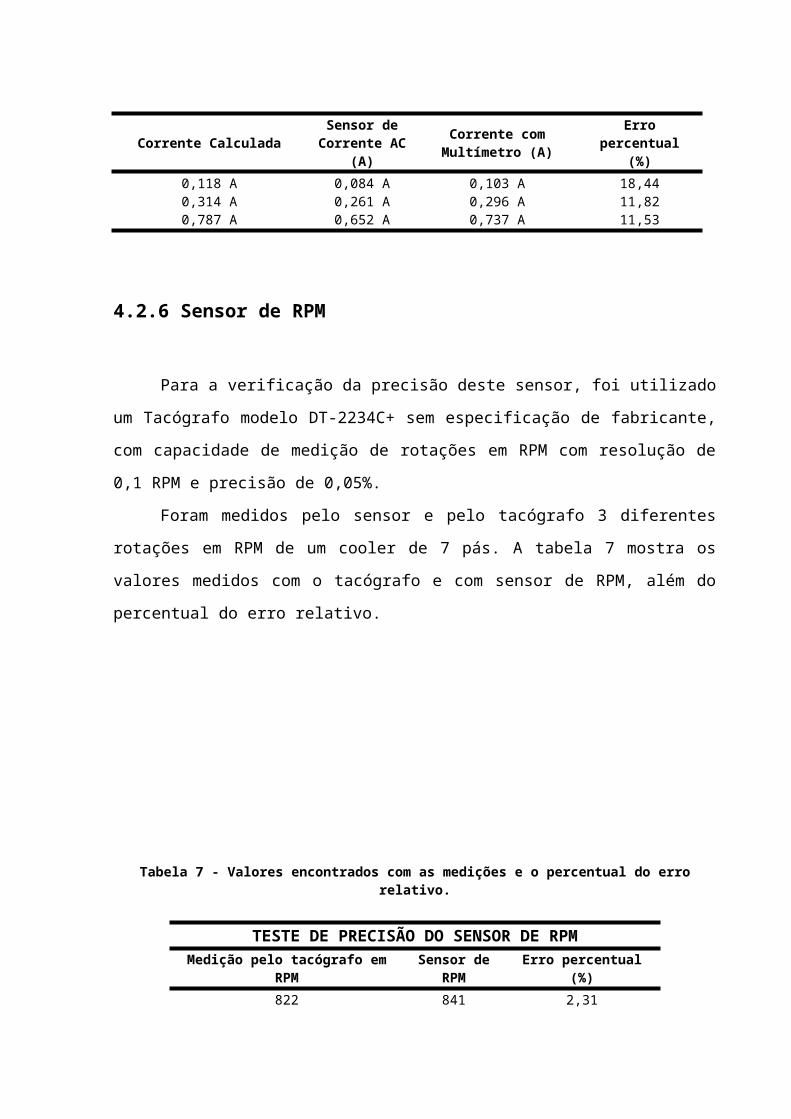

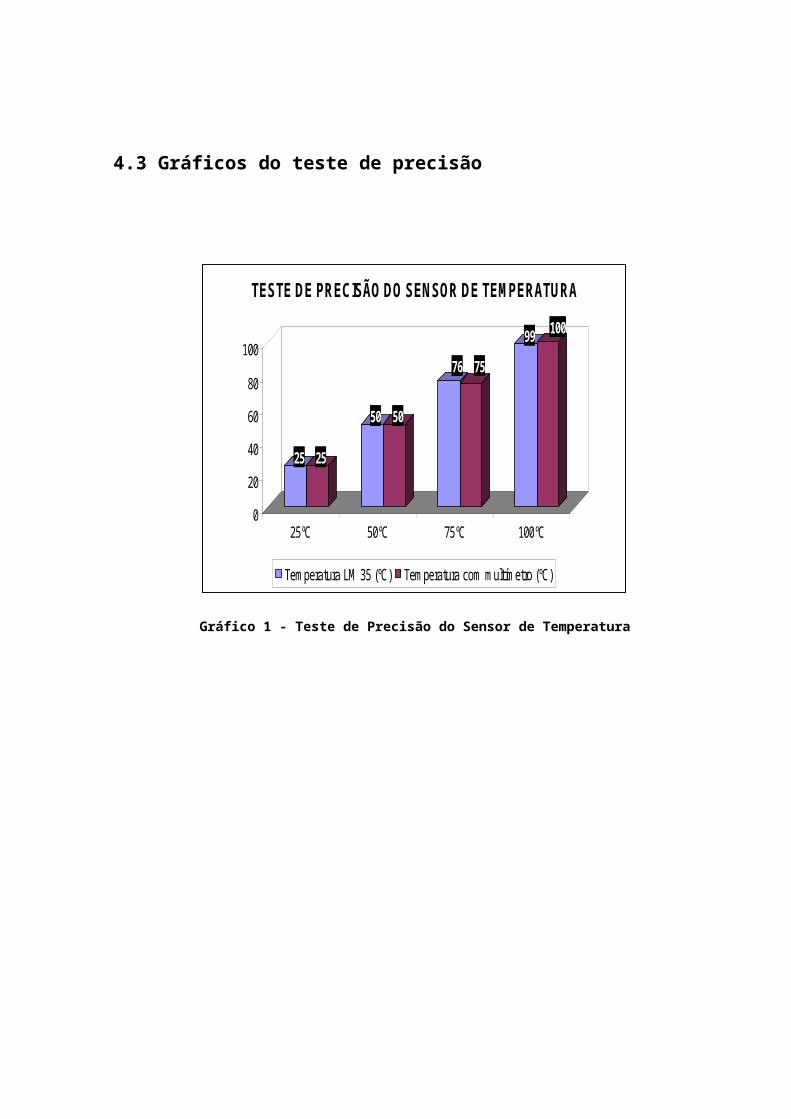
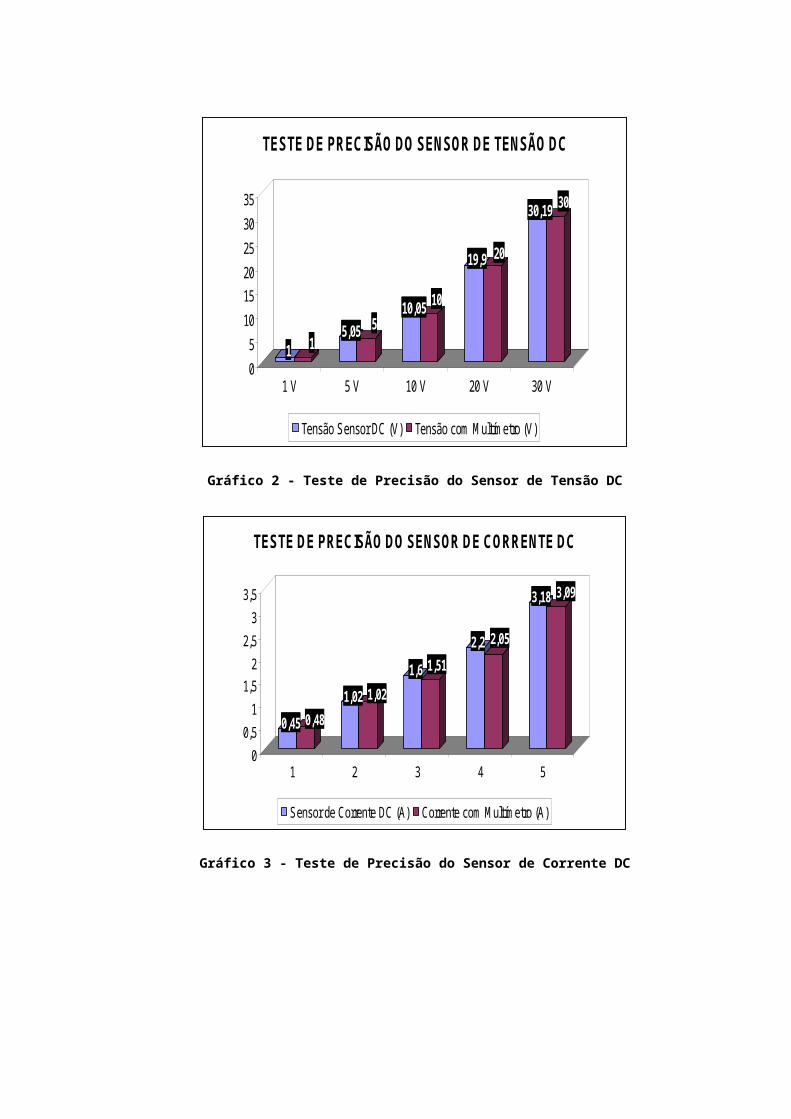
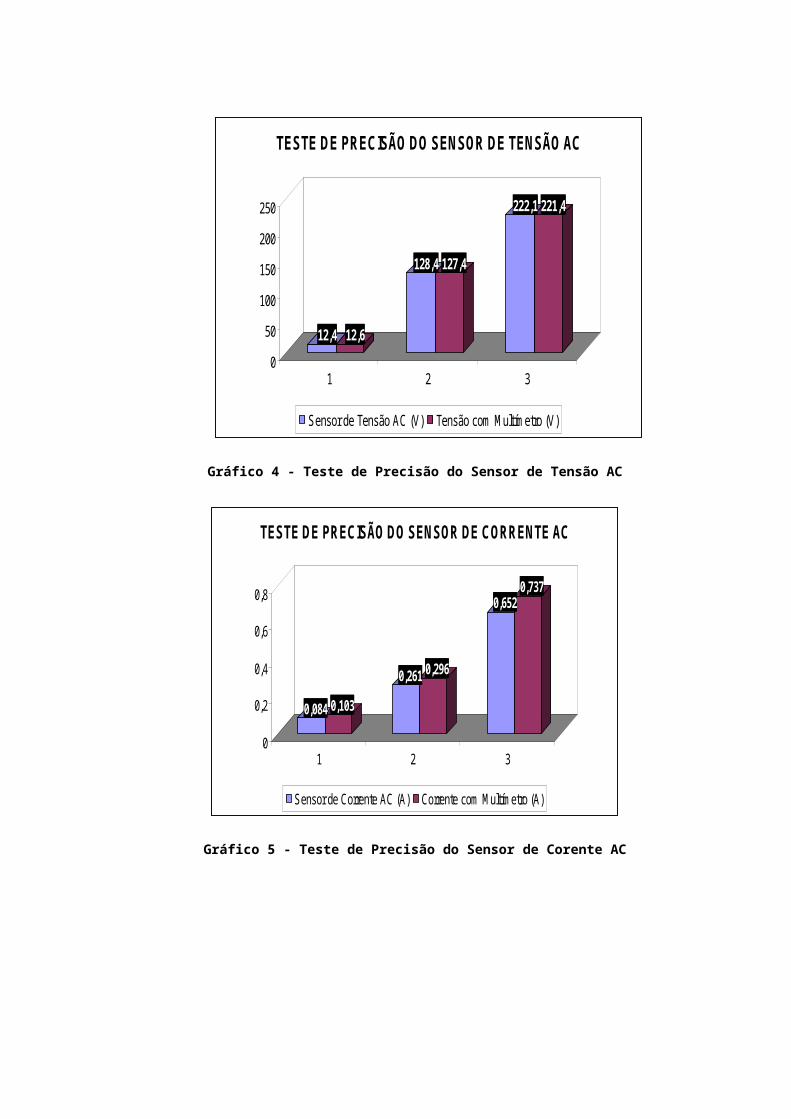
8.2 Anexo B
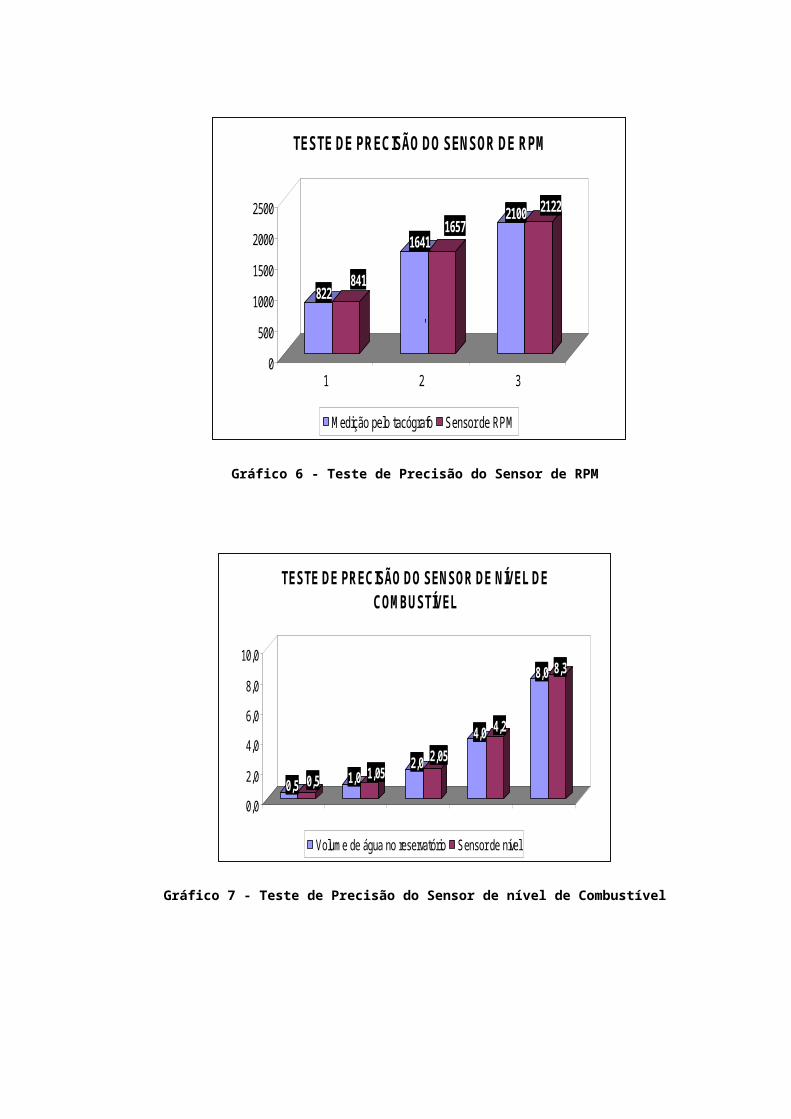
8.3 Anexo C