Teorema Del Engrane
28
Teorema del Engrane Plano -- Pág. 1 de 28 República Argentina Universidad de Buenos Aires Facultad de Ingeniería Departamento de Ingeniería Mecánica 67.12 - MECANISMOS “B” TEOREMA FUNDAMENTAL DEL ENGRANE PLANO CURVAS CONJUGADAS CONFIGURACIÓN DE RUEDAS DENTADAS A EVOLVENTE DE CÍRCULO EN SUS SECCIONES TRANSVERSALES Ing. MAYER, Omar E. [email protected] DICIEMBRE 2 008 Agradezco a mi actual alumno SANTAROSA Juan Ignacio ( [email protected] ), padrón 87 740, quien se ha servido escribir expresiones matemáticas varias en MathType, realizar correcciones idiomáticas y subindicar y supraindicar variables varias.
-
Upload
arte-gaucho -
Category
Documents
-
view
336 -
download
6
Transcript of Teorema Del Engrane
-
Teorema del Engrane Plano -- Pg. 1 de 28
Repblica Argentina
Universidad de Buenos Aires
Facultad de Ingeniera
Departamento de Ingeniera Mecnica
67.12 - MECANISMOS B
TEOREMA FUNDAMENTAL
DEL ENGRANE PLANO
CURVAS CONJUGADAS
CONFIGURACIN DE RUEDAS DENTADAS
A EVOLVENTE DE CRCULO
EN SUS SECCIONES TRANSVERSALES
Ing. MAYER, Omar E.
DICIEMBRE 2 008
Agradezco a mi actual alumno SANTAROSA Juan Ignacio ( [email protected] ), padrn 87 740, quien se ha servido escribir expresiones matemticas varias en MathType, realizar correcciones idiomticas y subindicar y supraindicar variables varias.
-
Teorema del Engrane Plano -- Pg. 2 de 28 INTRODUCCIN
En oportunidad de tratar las Transmisiones de Potencia Mecnica por Correas, se ha visto que se trata de transmisiones por friccin indirecta (correa intermedia, poleas en contacto indirecto) y se ha visto tambin que pueden hacerse por friccin directa si ambas poleas actan con contacto directo entre s. En ambos casos resultaban movimientos rotativos continuos, en el caso con correas con el mismo sentido de rotacin y en el caso sin correas con sentidos de rotacin opuestos. Tanto en un caso como en el otro, las poleas resultan elementos cilndricos exteriores, superficies en las cuales se verifica la friccin, ya sea entre correa y poleas o entre poleas directamente.
Resulta necesario tambin una cierta interaccin, que se simboliz con Qy, entre correa y poleas o entre poleas directamente, a efectos asegurar el arrastre, por friccin, de los elementos conducidos por parte de los elementos motores. La Transmisin de Potencia Mecnica con movimientos rotativos continuos puede hacerse tambin con ruedas dentadas y cadenas. Resultando aqu una transmisin por enganche entre dientes de ruedas y eslabones de cadena, se pueden analogizar, en cuanto al movimiento, ruedas dentadas con poleas y cadena con correa. Formada la cadena por una sucesin de eslabones, los dientes de la rueda motora enganchan, uno a continuacin de otro, los eslabones de la cadena, la cual, vindose obligada a circular junto con la rueda, con sus eslabones, uno a continuacin del otro, engancha los dientes de la rueda conducida, obligando a la misma a rotar sobre su eje. Es de uso universal este tipo de transmisin en bicicletas y comn en motos. Siendo la transmisin por correa una transmisin asincrnica, en la transmisin por cadena, la marcha de ambas ruedas resulta sincrnica e interpretando la transmisin por correa como una marcha sincrnica y teniendo presente el concepto de circunferencia o cilindro primitivo, el concepto de relacin de transmisin para ambos tipos de transmisiones, resulta el mismo: Radios primitivos de ruedas inversamente proporcionales a las pulsaciones de las mismas. Siendo que por cadena, ambas ruedas no pueden poseer distintos sentidos de rotacin (sin cadena intermedia, conforme debe resultar la configuracin de los dientes de las ruedas, la marcha no es posible) y que ambas ruedas deben estar dentadas exteriormente, las ruedas dentadas con lo que da en llamarse perfiles o curvas conjugadas (engranes) viene a llenar dicho vaco, esto es, marchan entre s sin elemento intermedio alguno y lo pueden hacer con distintos sentidos de marcha (ambas ruedas dentadas exteriormente) como con el mismo sentido (una rueda dentada exteriormente y la otra interiormente). Al menos respecto al uso de correa o de cadena, les son propios tambin movimientos diferenciales. Sin estos ltimos, seran tal vez imposibles el hecho de que un vehculo motorizado de al menos cuatro ruedas, pudiera describir una trayectoria curva, ms cuando ms velocidad pueda desplegar el vehculo y/o mas curvatura tenga la trayectoria y la existencia de robots flexibles. El siguiente trabajo trata sobre los aspectos geomtrico - analticos que hacen a la marcha de dos ruedas dentadas a perfiles conjugados como as tambin a la utilizacin de la evolvente de crculo como perfil conjugado, en las mismas, cuestiones que, al menos a juicio del autor, resultan bsicas en la comprensin del tema como as tambin fundamentales para el mismo.
-
Teorema del Engrane Plano -- Pg. 3 de 28
N1=N2T1t I
Rn2
O2
2
curva e2Rp2
Rb2
A2n
O11
Rn1n
A1N
Rb1
T2
Rp1
V1
V2T2
t
curva e1
RECESO
ACCESO
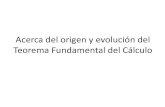
FIGURA 01
TEOREMA DEL ENGRANE PLANO
En la FIGURA 01 anterior, la curva e1 es una curva plana rotando con pulsacin (velocidad angular) 1 alrededor de O1 (centro de rotacin de la misma). Como consecuencia de dicha rotacin y de la configuracin del sistema, arrastra (conduce) a la curva plana e2, la cual se ve obligada a rotar alrededor de O2 y con una cierta pulsacin 2, relacionada a 1 como ya se mostrar.
As las cosas, e1 es motora de e2 y sta, conducida por e1. Siguiendo estndares y / o costumbres internacionales, se subindica con cifras impares las variables relacionadas a la curva motora e1 y con cifras pares las relacionadas a la curva conducida e2.
-
Teorema del Engrane Plano -- Pg. 4 de 28 Sea tambin que las dos curvas, en cualquier instante de la marcha conjunta, estn siempre en contacto a travs de un nico punto N (punto genrico) comn a ambas curvas y no siempre el mismo, a llamar punto de contacto y que en el mismo, posean tanto una recta normal n - n comn, como as tambin una recta tangente t - t comn.
LUEGO Y DENTRO DE CIERTAS LIMITACIONES A TRATAR, LAS CURVAS NO PIERDEN EL CONTACTO EN NINGN INSTANTE.
NOTA: Se demuestra que no es posible la marcha tal cual se ha descrito, con dos puntos de contacto. En tal caso, el sistema se traba. Para la comprobacin analtica de tal hecho, no hay ms que componer la razn de ambos movimientos, aplicando lo que a continuacin se trata. Las condiciones impuestas (marcha continua) implican que las velocidades lineales del punto de contacto N, considerado el mismo como perteneciente a una u otra curva y en la direccin de la recta normal comn n - n, deben ser iguales entre s: N1 = N2.
Origen de N1 = N2 : punto N
Siendo que los vectores representativos 1 y 2 de las pulsaciones 1 y 2 son de sentido opuesto entre s y que los vectores Rb1 y Rb2, vectores posicin de los puntos A1 y A2, son normales a la recta n - n, resulta:
1 21 1 2 2= = uur uur uur uur uuur uuurLLb bN R N R
1 1 2 2 1 1 2 2= = = = uur uur uur uur
LL LL LLN N N N
1 1 2 2= =uur uuurLLb b b bR R R R ;
1 21 2 1 2 1 2* *b bN N N N R R = = =
uur uur
Rb2 Radio base curva e2 conducida y si m = Relacin de transmisin = ---- = -----------------------------------------
Rb1 Radio base curva e1 motora
Resulta: 2
1
1
2
b
b
Rm
R= =
Nota: Resulta tambin (no en este trabajo) de
utilizarse como relacin de transmisin, la expresin: 1
2
2
1
1 bb
Ri
m R= = =
Siendo los tringulos O1.A1.I y O2.A2.I semejantes entre s, se obtiene:
-
Teorema del Engrane Plano -- Pg. 5 de 28
2
1
2
1
.
.b
b
R O IR O I
=
-----
Si Oi.I = Rpi = RADIO PRIMITIVO resulta:
2 2
1 1
1
2
b p
b p
R Rm
R R= = =
1 HIPTESIS: Sea: m = ---- = CONSTANTE
2
--------- ------ ------ y sea O1.O2 = O1.I + O2.I = Rp1 + Rp2 = CONSTANTE
Nota: La constancia de m implica nicamente la constancia del cociente o de la relacin entre las pulsaciones de ambas curvas y NO por ello, la constancia del valor absoluto y/o relativo de cualquiera de ellas.
TESIS: El punto I (punto primitivo comn), definido como la interseccin de las rectas n - n y O1.O2, ES FIJO y no depende del lugar en donde se encuentre el punto de contacto N entre ambas curvas, ni tampoco de la direccin de la recta n - n.
DEMOSTRACIN:
Siendo 2
2 1
1
*p p pp
Rm R R m
R= =
y siendo 1 2 1 21 2 1 2. .p p p pO O R R R O O R= + =
Con lo que 1 1 1 2* .+ = =p pm R R O O CONSTANTE
( ) ( )1 21 2 1 2. * .
1 1= =+ +LLp p
O O m O OR Rm m
Siendo, por hiptesis, constantes m y O1.O2, resultan constantes Rp1 y Rp2 y por estar fijados ambos valores por el punto I, ste RESULTA FIJO, de donde la tesis queda demostrada. Por ser absolutamente generales los valores puestos en juego, la posicin del punto I no depende de la del punto de contacto N ni de la direccin de la recta n - n, contenedora la misma del punto N en todo instante, se entiende mientras la marcha conjunta de ambas curvas resulte posible.
-
Teorema del Engrane Plano -- Pg. 6 de 28
DENOMINACIONES
N: Punto instantneo de contacto entre ambas curvas.
n - n: Recta de presin.
O1.O2: Lnea (recta) de centros de rotacin.
I: Punto primitivo comn.
Rn: Radio punto de contacto.
Rp: Radio primitivo.
Rb: Radio base.
Notas: 1) Rp1 y Rp2 dependen de la posicin del punto I. 2) Rb1 y Rb2 dependen de la posicin de la recta n - n y los mismos pueden ser constantes o no (direccin de la recta n - n constante o no). 3) Rn1 y Rn2 dependen de la posicin del punto N, el mismo sobre la recta n - n. Siendo de desplazarse el punto de contacto N durante la marcha conjunta de ambas curvas, si n - n es de direccin constante, Rn1 y Rn2 resultan variables.
CIRCUNFERENCIAS PRIMITIVAS
Supuestas dos circunferencias Cp1 y Cp2 a llamarse PRIMITIVAS (ver FIGURA 02 adjunta, siguiente pgina), de radio Rp1 la Cp1 y de radio Rp2 la Cp2, SOLIDARIAS ambas a las curvas e1 y e2 respectivamente y en consecuencia, rotando con sus centros en O1 y en O2 respectivamente, las mismas son tangentes entre s en el punto primitivo comn I y se mueven con la misma velocidad tangencial, cuestin que hace valedero decir que las circunferencias primitivas ruedan, una sobre la otra, sin resbalar entre si y que describen el mismo arco de circunferencia en el mismo tiempo de rotacin conjunta, de donde resulta una transmisin sincrnica de movimiento, no como las transmisiones a friccin (por correas y poleas o por poleas con contacto directo), que resultan asincrnicas.
Si Vt: Velocidad tangencial circunferencias primitivas
1 1 2 21 2= = uur uur uuur uur uur uuurLLt p t pV R V R
1 1 2 21 2= = LLt p t pV R V R
-
Teorema del Engrane Plano -- Pg. 7 de 28
N1=N2 T1=
T2I
O2
circunferenciaprimitiva Cp2
2
tRp2
Rb2
A2n
O1
n
A1
1
Rb1
t
V1=V2
circunferenciaprimitiva Cp1Rp1
FIGURA 02
RECESO
ACCESO
1 1
2 2
1
2
**
= =t pt p
V Rm
V R
1*m 1 2
1= =L L t tluego V V
Los valores de Vt1 = Vt2 resultan ser las desproyecciones de N1 = N2 sobre la normal a O1.O2, por ser Rp1 y Rp2 las desproyecciones de Rb1 y Rb2 sobre O1.O2.
( ) ( )1 21 2cos cos= =LLb bp ppc pcR R
R R
( ) ( )( ) ( )
1 2
1 2
1 2
1 1 2 2
1 1 2 2
1 2
* *
* *cos * *cos
*cos *cos
b b
p pc p pc
t pc t pc
R N N R
R N N R
V N N V
= = == = == = =
( ) ( )1 21 2cos cos= = =LL t tpc pcN Nluego V V
-
Teorema del Engrane Plano -- Pg. 8 de 28
DENOMINACIN: pc: ngulo de presin circunferencial.
Nota: Si durante la marcha vara la direccin de la recta n - n y no vara 1, no varan Vt1 = Vt2 por ser Vt = * Rp y Rp constante por ser fijo el punto primitivo comn I. En tal caso, N1 = N2 varan (conservando siempre la igualdad de sus valores vectoriales) por variar pc.
Definiciones:
Acceso: Zona previa, en el sentido de la marcha de las curvas, al punto primitivo comn I o a la lnea de centros O1.O2
Receso: Zona posterior, en el sentido de la marcha de las curvas, al punto
primitivo comn I o a la lnea de centros O1.O2.
DESLIZAMIENTO ENTRE e1 Y e2 EN EL ACCESO
En la FIGURA 01, el punto de contacto N como perteneciente a la curva e1, se mueve tangencialmente sobre la misma con la velocidad T1 y como perteneciente a la curva e2, se mueve de la misma manera sobre ella con la velocidad T2.
Ambas velocidades T surgen de la descomposicin de las velocidades V del punto de contacto, como perteneciente a una u otra curva, normales a los respectivos vectores posicin Rn del punto de contacto N, en las direcciones n - n y t - t.
Componente de V segn n - n: N
Componente de V segn t - t: T
= = + = uur ur uur uur ur uur ur uurL L Ln bsiendo Vt R N T y N R ( )= = ur ur uur ur uur ur uur uurL L n b n bse tiene T R R R R
Siendo 1 1 2 21 2. . = =uuur uur uuuur uuur uuur uuuuur
LLn b n bR R A N R R A N
Resulta 1 1 1 2 2 2. .= = ur uur uuuur uur uur uuuuur
LLT A N T A N
1 1 1 2 2 2* . * .= =LLT A N T A N
El movimiento del punto N de contacto puede describirse entonces como una traslacin del mismo sobre la recta n - n, ms una rotacin alrededor de A con radio AN (supuesto perteneciente a la curva e1, corresponden N1 y A1).
De la misma FIGURA 01 se deduce que estando el punto N en el acceso, T2 T1 y que en consecuencia la curva e2 resbala sobre la curva e1 (el perfil conducido resbala sobre el motor).
-
Teorema del Engrane Plano -- Pg. 9 de 28
Dividiendo las expresiones de T2 y T1 entre s y siendo m = 1 / 2:
1 1 1 1
2 2 2 2
. .* *
. .T A N A NmT A N A N
= =
El resbalamiento de la curva o perfil e2 sobre e1 aumenta con el aumento de la cercana del punto N al punto A1, siendo indeterminado el cociente T2 / T1 cuando N coincide con A1, por resultar T1 = 1 * A1.N = 0, de donde conviene (incluso como condicin de borde) que el punto A1 sea excluido como posible punto de contacto.
Excluyndose del contacto al punto A1, el punto N slo podr ubicarse, en la zona de acceso, en el tramo A1.I, verificndose entonces, en dicho tramo y zona:
1 1 12 1
2 2 2
. .* 1
. .T A N A NT T m mT A N A N
=
DESLIZAMIENTO ENTRE LAS CURVAS e1 Y e2 EN EL PUNTO PRIMITIVO COMN I
1 1 1 2 2 2* . * .= =L L L LEn estas condiciones T A I T A I
Por semejanza de los tringulos: O1.A1.I y O2.A2.I ya tratada, resulta:
2
2 1 1
2 1 2
1
. . ..
b
b b b
RA I A I A IR R A I R
= = Como 21
b
b
Rm R= , resulta
2 2
1 1
1 2
2 1
.
.b p
b p
R R A ImR R A I
= = = =
Dividiendo las expresiones de T2 y T1 entre s:
1 1 1
2 2 2
.*
.= =T A I m
T A I
1*m 1 2
1= =T T
Esta cuestin enuncia que Estando las curvas o perfiles e1 y e2 en el punto primitivo comn I, las mismas no resbalan entre s, verificndose as una rodadura pura entre ambas en dicho punto. Corresponde aplicar a este caso la FIGURA 02 vista al definir las circunferencias primitivas.
-
Teorema del Engrane Plano -- Pg. 10 de 28
DESLIZAMIENTO ENTRE e1 Y e2 EN EL RECESO
Representando esta situacin la FIGURA 03 siguiente, resulta T1 T2, por lo que ahora en el receso la curva motora es la que resbala sobre la conducida, por moverse a mayor velocidad sobre la recta tangente comn t - t.
T1V1 T1I
Rn2
2O2
Rp2t
Rb2 n
N1=N2
A2 T2
Rn1
O1
Rp1A1
n
Rb1
1
V2
t
N
FIGURA 03
RECESO
ACCESO
Resulta tambin, a como el punto A1, el punto A2 excluido como posible punto de contacto.
Siendo: 2 1T T se tiene: 1 12 2
.* 1
.T A NmT A N
=
de donde, en la zona de receso: 2
1
.
.A N mA N
De la exclusin de los puntos A1 y A2, surge que la existencia del punto N slo es posible en el tramo A1.A2, excluidos sus puntos extremos A1 y A2, condiciones de borde adems.
DEFINICIN: SEGMENTO DE ENGRANE EXTREMO (TRAMO A1.A2): Segmento de recta de presin (recta n n) donde puede verificarse el contacto puntual entre las dos lneas curvas e1 - e2, conforme todas las condiciones establecidas (normal comn, tangente comn, m = 1 / 2 constante y O1.O2 constante).
-
Teorema del Engrane Plano -- Pg. 11 de 28
Suponiendo el punto N fuera del tramo A1.A2, surge que las curvas e1 y e2, tangencialmente se mueven en sentidos opuestos o en contrasentido, como muestra la FIGURA 04 siguiente.
V1
N1=N2t
2
Rn2
O2
Rb2Rp2
T1 I
n
A2
Rn1
Rb1
A1
n
t
Rp1 T2
V2O1
1N
FIGURA 04
RECESO
ACCESO
Atendiendo al choque resultante, los posibles puntos de contacto fuera del segmento A1.A2 resultan NO convenientes (dentro de dicho segmento, ambas curvas, siempre sobre la recta tangente comn t-t, caminan siempre con el mismo sentido).
DIAGRAMA DE VELOCIDADES T
Siendo respectivamente T1 y T2 funciones lineales de A1.N y de A2.N, siempre y cuando 1 y / o 2 sean constantes, resultan los diagramas respectivos como muestran las FIGURAS 05 y 06 siguientes.
CURVAS CONJUGADAS
Durante la marcha, las curvas e1 y e2 (la primera siempre empujando a la segunda) van cambiando de posicin simultneamente y as lo har el punto N de contacto sobre ellas y sobre la recta n - n, debiendo ser nico en cada instante de la marcha. En cada posicin del punto de contacto, las curvas deben tener una normal y una tangente comunes que contengan a dicho punto y adems la normal, sin tener por qu ser esta de direccin constante, deber pasar siempre por el punto primitivo comn I, siempre con O1.O2 y m constantes
-
Teorema del Engrane Plano -- Pg. 12 de 28
T1A2
Rp2
I
2O2
Rb2
A2
n
O1
T2A1
A1
n
1
Varia
cin
T1
T1I =
T2IVa
riaci
n T2
Rp1
FIGURA 05
RECESO
ACCESO
I
2m, 1, 2:CONSTANTES
ACCESO
Rp2
FIGURA 06
RECESO
O2
A2Rb2
O11
T2A1
n
A1
T2 --
T1
T2I -
- T1I
= 0
T1A2
T1 --
T2
Rp1
n
Se denomina CURVAS CONJUGADAS a los pares de curvas que cumplen dichas condiciones: un nico punto de contacto, una normal comn y una tangente comn en dicho punto de contacto.
Las circunferencias primitivas Cp1 y Cp2 son un par de curvas conjugadas; en todo instante el punto de contacto respectivo coincide con el punto primitivo comn I; la normal comn es la lnea de centros O1.O2 y la tangente comn, la recta normal a dicha lnea y ambas pasantes por o continentes de I.
CURVAS CONJUGADAS A EVOLVENTE DE CRCULO
Sea un crculo base Cb (FIGURA 07 siguiente) de radio Rb (asciese este Rb con el Rb visto al tratar las figuras anteriores, es el mismo) con una recta tangente n - n (asciesela con la vista al tratar las figuras anteriores, es la misma) que va rodando sobre el crculo base sin resbalar, de manera tal que siendo los puntos B0, B1, B2, .... los sucesivos puntos de tangencia entre ambos, se verifica:
--------- arco B0.B1 = segmento B1.A1
---------
arco B0.B2 = segmento B2.A2 ---------
arco B0.B3 = segmento B3.A3
La curva que une los sucesivos puntos Ai (sucesivas posiciones del punto A0 perteneciente a la recta n - n), constituye la evolvente de crculo buscada. La misma resulta ser el lugar geomtrico de las sucesivas posiciones de un punto de
-
Teorema del Engrane Plano -- Pg. 13 de 28 una recta, que haciendo tangencia en un crculo (crculo base), rueda sobre el mismo sin resbalar. Ntese que esta curva, conforme su definicin y generacin, slo puede ser exterior al crculo.
t4 n4 B5B4
t8
n8
t6A6
t7
t8A8
n7
t7A7
n5A5
t6
t5
A4t4t5
n6 n0
t9t9A9 A10t10
n9 n10
FIGURA 07
n3
A0B0
A3
A2
B2B1
B3
n0 Rb
B9
B6
B7
B8
B10
Cb
Siendo A0 el punto de arranque de la evolvente, resulta:
B0.B9 = Rb * r (ngulo en radianes)
------------
B9.A9 = Rb * tg ()
------------ como B0.B9 = B9.A9 resulta r = tg()
Esta ltima expresin corresponde entonces a la expresin matemtica de la evolvente de crculo, cualquiera sea el punto B.
-
Teorema del Engrane Plano -- Pg. 14 de 28
PROPIEDADES:
Dos evolventes de un mismo crculo, son paralelas entre s.
Las rectas BA son normales a la evolvente en el punto A y en dicho punto, la evolvente tiene una recta tangente, normal a su normal.
El segmento BA es radio instantneo de curvatura de la evolvente en A y B es centro instantneo de curvatura de la evolvente en el mismo punto A.
Aplicadas e1 y e2 a un engrane entre ambas, ambas de crculos base Cb1 y Cb2 y de radios Rb1 y Rb2 respectivamente, e1 y e2 resultan ser un par de curvas conjugadas, verificndose la existencia de una normal n - n y de una tangente t - t comunes, ambas de direccin constante durante un movimiento de engrane entre las mismas.
------------ ------------ B5.B4 = B5.A5 -- B4.A4
O2 n
2 Cb2
Rp1
Rb2
Rp2e2
t I
e1
N
A2
Rb1
A1
O1
n
t
1
FIGURA 08
RECESOACCESO
-
Teorema del Engrane Plano -- Pg. 15 de 28
En la FIGURA 08 anterior, la curva e1 (evolvente del crculo base Cb1) rotando con pulsacin 1, empuja a la curva e2 (evolvente del crculo base Cb2), la cual, rotando con pulsacin 2 por la accin de e1, por lo ya visto verifica: 1
2
2
1
b
b
RR
=
El punto instantneo de contacto resulta ser N y la recta n - n es normal comn a ambas evolventes e1 y e2, por ser tangente comn a los respectivos crculos bases Cb1 y Cb2.
Las rotaciones de e1 y e2 resultan alrededor de los centros O1 y O2 respectivamente, centros tambin de los crculos base Cb1 y Cb2, los cuales pueden ser supuestos solidarios a sus evolventes e1 y e2.
Durante la marcha, la recta n - n no cambia de direccin (curvas conjugadas particulares), el punto de contacto N se desplaza sobre dicha recta, desde la zona de acceso a la zona de receso; sobre la curva e1 hacia afuera de la misma o hacia su cabeza y sobre la e2 hacia adentro o hacia su raz y la recta t - t se desplaza paralela a s misma, desde el acceso hacia el receso. La curva e1 resulta ser la motora y la e2, la conducida.
LIMITACIONES EN EL CONTACTO ENTRE e1 Y e2
En las FIGURA 09A y 09R siguientes, supuesto coincidente el punto de contacto N con A1 o A2 respectivamente, en A1 est haciendo contacto el punto ms bajo de la evolvente e11 y en A2 el ms bajo de la evolvente e22, por lo que el contacto entre e1i y e2i no es posible fuera del segmento A1.A2.
El par e10 - e20 no respeta las condiciones, por no ser normal e10 a n - n (obsrvese bien, la apreciacin inmediata puede resultar dificultosa, ambas curvas se cruzan), lo mismo sucede con el par e13 - e23, por no ser normal e23 a n - n.
Los pares e11 - e21 y e12 - e22 pueden tambin representar los instantes extremos del contacto posible de un nico par de evolventes, constituyndose as los puntos A1 y A2 en los puntos de contacto inicial y final respectivamente.
No se hace necesario entonces, un tramo de e1i ms all de Ar1.A2 (ver evolvente e12) y un tramo de e2i ms all de Aa2.A1 (ver evolvente e21); por lo que ambas evolventes pueden estar limitadas por circunferencias de cabeza de radios mximos Rc1mx = O1.A2 para las evolventes e1i y Rc2mx = O2.A1 para las e2i.
Surge entonces que, de verificarse la ley del engrane, las evolventes e1i slo pueden rotar con centro en O1, el ngulo 1a + 1r; mientras que las e2i con centro en O2, el ngulo 2a + 2r, valiendo por tratarse del mismo tiempo (marcha sincrnica):
1 11
2 2 2
a r
a r
m
+= = +
-
Teorema del Engrane Plano -- Pg. 16 de 28
Rp1
Cb2
Rb2
2a
O2
e21
I
n
A2
Cp2
Cp1
Cb1
1e10e11
1ae20A1Rb1
O1
n
FIGURA 09A
RECESO
ACCESO
Cp1
Aa2
Rp2
Supuestas solidarias las evolventes a los crculos bases respectivos, para que stos den una vuelta completa a efectos no perder continuidad en el movimiento de los crculos, ser necesario disponer de una cantidad entera Z de evolventes sobre cada uno de ellos, de manera tal que cuando un par de evolventes o perfiles, uno de una rueda y el otro de la otra, salga del contacto en el punto A2 o en un punto anterior, el par siguiente ya est en contacto, habindolo iniciado en el punto A1 o en un punto posterior.
PASO BASE CIRCUNFERENCIAL
La FIGURA 10 siguiente muestra dos pares de evolventes e1 - e2 en contacto simultneo, el mismo dentro del segmento de engrane mximo A1.A2.
-
Teorema del Engrane Plano -- Pg. 17 de 28
O2
FIGURA 09R
2e23
n
e22
Rb2
Cb2
ACCESO Rp2
A2
2r
Cp2I
Cp1
RECESO
1r
1 Ar1
Rb1
A1 Rp1
O1
Cb1n
e12
e13
La distancia entre ambos puntos de contacto y por las propiedades vistas al tratar las evolventes, resulta ser igual a los arcos de circunferencias base A1a.A1p y A2a.A2p, sobre Cb1 y Cb2 respectivamente.
--------- --------- siendo: A1.Np = A1.A1p y A1.Na = A1.A1a
--------- --------- A2.Np = A2.A2p y A2.Na = A2.A2a
---------
resulta: tbc = Na.Np = A1a.A1p = A2a.A2p
---------- Siendo Na.Np, A1a.A1p y A2a.A2p, el paso a que se encuentran
-
Teorema del Engrane Plano -- Pg. 18 de 28 las evolventes sobre los respectivos crculos base, ser necesario, a efectos no perder continuidad de movimiento alguna, que las evolventes de una rueda estn al mismo paso que las de la otra, debiendo cumplirse adems:
---------- ---------- Na.Np = A1a.A1p = A2a.A2p A1.A2
tbce1p
RECESO
A2A2a
ACCESO
Rb2
O2
A2pta
pcRp2
tbc
Nae2p
tp INp
n
e2ata
A1a
O1 1
tbcA1
A1p tp
Rb1pc Rp1
e1a
FIGURA 10
n
2 Cb2
Cb1
Tambin se verifica y con pc = ngulo de presin circunferencial: ( ) ( )1 21 2 1 2. . . * tanb b pcA A A I A I R R = + = + Se hace necesario entonces una distribucin uniforme de evolventes a lo largo de Cb1 y de Cb2, conforme cierto pase base circunferencial tbc, igual para ambos crculos base, de manera tal que siendo Z1 la cantidad de evolventes e1 y Z2 la cantidad de evolventes e2, se verifique: ( ) ( )1 21 2. * tanbc b b pct A A R R = +
1,2
1,21,21,2
2 * ** 2 * *= = bbc b bc
Rt Z R t
Z
-
Teorema del Engrane Plano -- Pg. 19 de 28
1 2 2
1
2
1 2 1
2* * 2* *= =L L b b bb
R R R Zde dondeZ Z R Z
2 2
1 1
1 2
2 1
= = = =L L L L b pb p
R R Zpor lo que mR R Z
Siendo 2* * b
bcRt
Z= a la relacin 2*bc bt RZ =
se la denomina Mdulo Base Circunferencial Mbc: 2*bc b
bct RM
Z= = ( ) **cos :
2*= =L Lbcb p pc Z tsiendo R R resulta ( ) ( )
*2* * *cos * 2* *cos
bcp pc bc p
pc
Z tR Z t R = = Si ( )cos bc pcpc
t t = tpc = paso primitivo circunferencial
resulta: 2* * *p pcR Z t = resultando as tpc el paso entre evolventes medido sobre la circunferencia primitiva (paso primitivo circunferencial).
2*= =pc p pct R
MZ Mpc = Mdulo Primitivo Circunferencial
En funcin de que ( )cos = = =L L pcbc bcpc bc pcpctt tt M M
( )* cos=LL bc pc pcresulta M M
Recapitulando y siendo: Db = Dimetro Crculo Base. Dp = Dimetro Circunferencia Primitiva.
2 * * * 2 *= = = =LLb b b bbc bcR D R Dt MZ Z Z Z
;
2* * * 2*= = = =LLp p p ppc pcR D R D
t MZ Z Z Z
;
* 2* * 2*= = = =LLbc b b pc p pZ M R D Z M R D ;
-
Teorema del Engrane Plano -- Pg. 20 de 28
( )*cos= = =L L pcbcb p pc bc pc ttR R M M ; ( ) ( )* cos * cos= =LLbc pc pc bc pc pct t M M ;
Nota: De los mismos valores de tbc (Mbc) y de pc (evidente) para ambas ruedas, surge la igualdad de tpc (Mpc).
CIRCUNFERENCIAS DE CABEZA Al tratar las FIGURAS 09A y 09R, se vio que era conveniente y necesario limitar superiormente las evolventes, con una circunferencia de cabeza de radio Rc2mx = O2.A1 en el caso de la rueda conducida y Rc1mx = O1.A2 en el de la motora.
Siendo: ( )1 21 2
. * tan .= =LLb pc pA I R O I R
( ) ( ) ( )( )2 2 22 2 1 2 1. . 2* . * . *sinmxc pcR O I A I O I A I = + +
( )( )( ) ( )
2
2 1
2 1
2
22 * tan
2* * *sin * tan
=
LLmx
p
c b pc
p b pc pc
R
resulta R R
R R
( )( )( ) ( )
1
1 2
1 2
2
22 * tan
2* * *sin * tanmx
p
c b pc
p b pc pc
R
R R
R R
=
SEGMENTO DE ENGRANE AR A1.A2
Llamando Rc al radio de la circunferencia de cabeza y si el mismo resulta ser igual a (Rp + Mpc), se tiene:
( )* * * 22 2
pc pcc p pc pc
M Z MR R M M Z= + = = +
Si Rc2 O2.A1 = Rc2mx y/o Rc1 O1.A2 = Rc1mx, el contacto entre evolventes se verificar sobre un segmento AR de la recta de presin n - n, menor o igual a A1.A2., tal como muestra la FIGURA 11 siguiente.
-
Teorema del Engrane Plano -- Pg. 21 de 28
tbc
e1p
e2a
A2tbc A2a
Rb2
O2
A2pta
pcRp2
Nae2pCc1
Rc2 R
tp INp
n
ta
A1a
O1 1
tbcA1
Cc2A
A1p tp
Rb1pc Rp1e1a
Rc1
RECESOACCESO
FIGURA 11
2 Cb2
Cb1n
El punto A, interseccin de la circunferencia de cabeza Cc2 y la recta de presin n - n, resulta ser el inicio del contacto o engrane entre las evolventes; y el punto R, interseccin de la circunferencia de cabeza Cc1 y la recta de presin n - n, la finalizacin; y las circunferencias de cabeza se cortan entre s, por ser de radios mayores que las primitivas correspondientes, tangentes ellas entre s en el punto primitivo I.
Siendo, por propiedad de los tringulos obtusngulos:
( ) ( )( ) ( )2 2 22 2 22* * *sin 0p pc p cAI R AI R R+ + =
( ) ( )( ) ( )1 1 12 2 22* * *sin 0p pc p cIR R IR R R+ + =
( )* * 22 2
= = +LL LLpc pcp cM M
y R Z R Z ( )* *cos= + =LL bc pc pcAR AI IR t M ;
operando, resulta:
-
Teorema del Engrane Plano -- Pg. 22 de 28
( ) ( ) ( )( ) ( ) ( )( ) ( )
2
2 2
2
1 1
2 1
2 * tan 4* 1
2* * 2 * tan 4* 1
* tan
pc
pcbc
pc
Z Z
AR Z Zt
Z Z
+ + + = + + + +
A efectos de asegurar continuidad (instantes con un diente en contacto intercalados con instantes con dos dientes en contacto) en el movimiento: debe resultar al menos AR tbc, por lo que: ( AR / tbc ) 1, luego:
( ) ( ) ( )( ) ( ) ( )( ) ( )
2
2 2
2
1 1
2 1
2 * tan 4* 1
2* 2 * tan 4* 1
* tan
pc
pc
pc
Z Z
Z Z
Z Z
+ + + + + + +
DEFINICIN:
AR; Segmento de engrane: Segmento de recta de presin donde se verifica el contacto entre evolventes
Si Z2 y Z1 tienden a (cremalleras), todas las circunferencias tienden a formar una lnea recta (cremalleras) y aqu es donde AR (que aumenta con el aumento
de Z1 y/o de Z2) toma su mximo valor: ( )2* sinpc pcM
(FIGURA 12 siguiente).
A
Cc1 R
Cp1Cp2 Mpc
Mpcn
pc
n a O1 Cc2
a O2
FIGURA 12
DURACIN DE ENGRANE Plano de engrane. Las circunferencias resultan ser secciones transversales de cilindros, de donde, as como se definieron curvas evolventes de circunferencias base, se pueden concebir superficies evolventes de cilindros base. Si estas superficies son paralelas a los ejes longitudinales de dichos cilindros y definido el plano de engrane como el plano formado por el segmento de engrane AR y la longitud b de los cilindros - superficies evolventes, estas, tomadas de a pares, una
-
Teorema del Engrane Plano -- Pg. 23 de 28 de un cilindro base y la otra del otro, harn contacto a lo largo de una lnea recta, a llamar lnea de contacto (LC), visible en dicho plano y paralela a la direccin de los ejes longitudinales de los cilindros. En la FIGURA 13 siguiente, representativa la misma de un plano de engrane, se han dibujado sobre LC flechas varias; las mismas representan el movimiento de la lnea de contacto LC durante la marcha de los cilindros. Las lneas de contacto de las superficies evolventes, nacen en AA (acceso), se desplazan por el plano de engrane, del acceso al receso (de izquierda a derecha en la figura) y mueren en RR (receso).
Se define como duracin de engrane , a la relacin AR / tbc, funcin de Z1, Z2 y pc como se ha visto.
ACCESO
mov
imie
nto
Lcm
ovim
ient
o Lc
A R
Lc
A
b
R
FIGURA 13(Plano de Engrane)
RECESO
La misma expresa cuntos pares de evolventes se encuentran simultneamente en contacto, conforme sea la relacin AR / tbc y el instante observado. Supngase 2 > > 1; por ser mayor a 1, resulta asegurada la continuidad de la marcha; 2 > > 1 implica la existencia, en forma alternativa, de un par y de dos pares de evolventes en contacto. Supngase adems dos instantes distintos como se muestra en la FIGURA 14 siguiente.
Por ser tbc < AR < 2 * tbc, la/s lnea/s de contacto estar/n separada/s, tanto de AA como de RR, distancias menores a tbc, en estas condiciones podr/n existir una o dos lnea/s de contacto, presentndose ambas situaciones en forma alternativa. La FIGURA 15 siguiente muestra de manera rayada, la zona donde puede existir una nica lnea de contacto (alrededor de la lnea primitiva comn) y en tal caso, suceder lo mismo en el plano de engrane ntegro.
Un valor de entre 0 y 1 no garantiza continuidad de movimiento, por la existencia de instantes con cero pares de evolventes en contacto; no resultando aconsejable 3 < < 2, por imprecisiones de fabricacin y montaje; corporalmente (matemticamente no existen inconvenientes) resulta difcil (se requiere elevar la precisin continuamente) iniciar el contacto en un tercer par de perfiles, existiendo ya dos en contacto, incluso tambin por la deformacin que experimentan stos si
-
Teorema del Engrane Plano -- Pg. 24 de 28 se transmite potencia.
Por ser mximo el segmento de engrane AR, cuando lo que engranan son dos cremalleras (FIGURA 12) as lo ser la duracin de engrane .
mov
imie
nto
LcA R
-
Teorema del Engrane Plano -- Pg. 25 de 28
si pc = 20 ; Z1 = Z2 = 30 ; = 1,6535 ; Z1 = Z2 = 15 ; = 1,4814 ; Z1 = Z2 = 3 ; = 1,0512 ; Z1 = Z2 = 2 ; = 0,9643
TRANSMISIN de POTENCIA Las superficies a evolvente de crculo como han sido tratadas hasta ahora, por ser superficies, no estn capacitadas para transmitir fuerzas (momentos torsores, potencia). Se hace necesario entonces, construir cuerpos con ellas y con los cilindros que las sustentan. A dichos cuerpos, compuestos por dientes y cilindros de raz de los mismos, se los llama ruedas dentadas y se denomina mecanismos a engranes a por lo menos un par de ruedas dentadas que engranan entre s conforme el teorema fundamental del engrane. Habiendo consumo de potencia en la rueda conducida, la rueda motora deber entregar al mecanismo, la misma potencia ms las prdidas que se producen en los flancos de los dientes en contacto, por deslizamiento entre los mismos (diferencia de velocidades T, como se analiz). Supuestas nulas dichas prdidas, siendo N la potencia puesta en juego y Mt el momento torsor, en un mecanismo de dos ruedas en engrane se verifica:
2
1 2
1
11 2
2
* * tt tt
MN M M
M = = =
por lo que si se aumenta el momento torsor, se reduce la velocidad angular y viceversa. Finalmente:
2 2 2
1 1 1
1 2
2 1
b p t
b p t
R R MZmR R Z M
= = = = =
CONFIGURACIN de RUEDAS DENTADAS de DIENTES RECTOS La FIGURA 16 siguiente muestra el dentado de una rueda dentada exteriormente (resulta de haber tambin con dentado interior) y en ella resultan:
Cc: Circunferencia de cabeza de radio Rc
Cp: Circunferencia primitiva de radio Rp Cre: Circunferencia raz de evolvente de radio Rre (depende del proceso de
tallado de los dientes y a dicho radio se encuentran los puntos mas bajos de la evolvente tallada: Rre Rb)
Cr: Circunferencia raz de diente de radio Rr
Cb: Circunferencia base de radio Rb
b: Ancho / espesor de rueda
tpc: Paso primitivo circunferencial: Arco de circunferencia primitiva, comprendido por puntos homlogos de dos dientes consecutivos
-
Teorema del Engrane Plano -- Pg. 26 de 28
bCpCre
CbCr
CrCb
Cre
kCc
Cp h wvll
CreCr
Cp
tpcCc
FIGURA 16
Acuerdo de raz:
Curva de acuerdo entre la raz de la evolvente y la circunferencia de raz de diente; en cada uno de sus encuentros con ambos elementos, tiene una recta tangente y una normal comn con los mismos. Su geometra depende del proceso de tallado de la rueda y de la geometra del diente tallador.
Con procesos de tallado por generacin, la evolvente tallada resulta ser conjugada de la evolvente del diente tallador, la circunferencia de cabeza tallada, conjugada de la circunferencia / lnea de raz del diente tallador; la circunferencia de raz tallada, conjugada de la circunferencia / lnea de cabeza del diente tallador y el acuerdo de raz tallado, conjugado del acuerdo de cabeza del diente tallador
nicas circunferencias visibles : Cc y Cr
Circunferencias no visibles : Cp, Cre y Cb
Total circunferencias caracteristicas : 5 (Cinco) Un diente se compone de un lleno y de un vaco y lo que se talla son los vacos.
ll: Lleno del diente. Se define sobre la circunferencia primitiva
v: Vaco del diente. Se define sobre la circunferencia primitiva Dado que en dos ruedas que engranan entre s, ambas circunferencias primitivas ruedan entre s sin resbalar, matemticamente es lcito hacer ll = v, constructivamente es necesario v > ll, a efectos evitar enclavamientos entre los dientes de ambas ruedas.
k: Altura de cabeza = Rc -- Rp (Mpc para construcciones generales). La cabeza del diente va de la circunferencia de cabeza a la circunferencia primitiva.
w: Altura de raz = Rp -- Rr. La raz del diente va de la circunferencia primitiva a la circunferencia de raz.
Puesto que la circunferencia de cabeza de una rueda NO acciona (no roza) la de raz de la otra y viceversa, se hace w > k, denominndose juego de cabeza
-
Teorema del Engrane Plano -- Pg. 27 de 28 a la diferencia.
w = 1,166 * Mpc o w = 1,25 * Mpc para construcciones generales. Juego de cabeza resultante = 0,166 * Mpc o 0,25 * Mpc
h = altura de diente = k + w = Rc -- Rr h = 2,166 * Mpc o 2,25 * Mpc
Dado que Rre Rb y Rre > Rr, puede suceder que Rr Rb o Rr Rb (ver FIGURA 17 siguiente)
*1, 25* 1, 25*
2= = = L LL pcpc r p pc
M ZSi w M R R w M
( )* 1, 25* * 2,52 2
= = = = pc pcr p pc rM Z M
R R w M R Z
( ) ( )*cos * *cos2= =LL pcb p pc pcMSiendo R R Z
para Rb = Rr, resulta: ( )2,5
1 cos pcZ =
Cantidades de Z mayores a la de la expresin, aseguran Rr > Rb y por el contrario, cantidades menores hacen Rr < Rb.
Para pc = 20, resulta Z = 41,454
FIGURA 17
Lleno de dientecon Rr > Rb
Lleno de dientecon Rr < Rb = Rre
NOTA: Las figuras utilizadas en este trabajo no dibujan la evolvente de crculo bajo la forma de una curva (es imposible, se necesita infinita cantidad de puntos, como as tambin de normales y tangentes, adems tiempo), las dibujan como una sucesin de lneas rectas, tangentes las mismas a la curva (rectas t t) y normales a las rectas tangentes (rectas n-n) a los crculos base. Un diente tallado con cremallera herramienta resulta con flancos conformados por lneas rectas en una cantidad finita y previamente definida.
-
Teorema del Engrane Plano -- Pg. 28 de 28
OTRA: CONDICIN N1 = N2: Siendo de referencia la FIGURA 01, por ser la recta t t tangente a ambas curvas, el punto N de contacto entre las mismas y como perteneciente a una u otra curva se desplaza sobre cada una de ellas durante la marcha conjunta de las mismas, esto es, sobre la recta t t (desplazndose esta tambin) con la velocidad T respectiva a cada curva. Como la trayectoria final del punto N est dada por la direccin de la velocidad V, conforme es la curva que se considere, ambas trayectorias, cada una de ellas, pueden ser consideradas como compuestas por trayectorias componentes sobre la recta t t y sobre la recta n n, ambas normales entre s. No resultando, a excepcin de en el punto primitivo comn I, las direcciones de V1 y V2 coincidentes entre s, para que las curvas no pierdan el contacto, resulta indefectiblemente necesario que N1 = N2, en direccin, magnitud y sentido.