Revista Parcerias Estratégicas Versão integral em PDF pe_16.pdf

of 100
Upload
ricardo-colosimoCategory
view
217download
08/17/2019 AE2_Elasticidade2D_v4.pdf
1/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
1
Introdução ao Método dos Elementos Finitos:
Elasticidade Plana e Tridimensional
1. Introdução
Este texto resume a aplicação do elemento de deslocamento do Método dos Elementos Finitos na
solução de problemas de elasticidade plana e tridimensional.
Começa-se por definir as hipóteses da análise física e geometricamente linear, e recordar as
situações em que se pode admitir que corpos elásticos têm comportamento plano. É este o tipo de
comportamento utilizado na apresentação e interpretação do Método dos Elementos Finitos, o
qual é posteriormente generalizado para a análise de sólidos elásticos.
Definem-se as variáveis necessárias para caracterizar o problema e as equações que simulam
o comportamento da estrutura, recorrendo-se a um exemplo simples para ilustrar a identificação
das variáveis e a função de cada uma das equações, as quais são organizadas de forma idêntica às
da modelação do comportamento de peças lineares: as condições de equilíbrio e de
compatibilidade, no domínio e na fronteira da peça, e as relações de elasticidade.
O exemplo de aplicação é também usado para mostrar que a solução exacta dessas equações
não tem expressão analítica, na maioria das aplicações. Introduz-se, por isso, a ideia básica daformulação do Método dos Elementos Finitos aqui adoptada, de aproximar o campo de
deslocamentos. Descreve-se depois, sumariamente, a generalização para o caso plano da
formulação anteriormente desenvolvida para a análise de peças lineares.
Essa generalização é ilustrada com um exemplo de introdução, o qual é utilizado para
formular e analisar os critérios de aproximação do campo de deslocamento e a consequente
aproximação do campo de deformações, de modo a assegurar a condição central de obter
soluções aproximadas cinematicamente admissíveis. A aproximação que se obtém para o campode tensões aplicando as relações de elasticidade é utilizada para mostrar que não é possível, em
8/17/2019 AE2_Elasticidade2D_v4.pdf
2/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
2
geral, satisfazer localmente as condições de equilíbrio, tanto no domínio como na fronteira do
elemento. O conceito de força nodal equivalente é depois generalizado e utilizado para formular
a equação resolvente do Método dos Elementos Finitos, cuja interpretação é análoga à obtida
para peças lineares: define o equilíbrio nodal dos elementos da malha, combinando as forças
nodais devidas aos deslocamentos nodais (os termos da matriz de rigidez do elemento) e
resultante das forças nodais equivalentes às forças aplicadas, designadamente as forças de massa
e as forças de fronteira do elemento.
Estes conceitos são depois gradualmente generalizados. Começa-se por definir os elementos
mais simples usados na análise de estados planos e usam-se esses resultados para generalizar a
formulação do Método dos Elementos Finitos. As dificuldades de implementação do exemplo
usado para ilustrar essa generalização são depois usadas para justificar a formulação doselementos isoparamétricos, correntemente utilizados nos programas comerciais.
A grande vantagem destes elementos é permitirem generalizar, de uma maneira
computacionalmente muito eficaz, a representação da geometria da peça em análise e a
formulação de elementos com diferentes graus de aproximação do campo de deslocamentos.
Para além de demonstrar as vantagens alcançadas com o desenvolvimento de elementos
isoparamétricos, o objectivo principal do texto é o de realçar e fundamentar os cuidados a ter na
sua utilização. Dá-se particular atenção à análise da adequabilidade das malhas de discretizaçãoque suportam a utilização desses elementos na análise de problemas bidimensionais.
Concluída a apresentação e a ilustração dos principais conceitos que suportam a aplicação do
Método dos Elementos Finitos na análise de problemas de elasticidade plana, sistematiza-se a
generalização da formulação para a análise de problemas tridimensionais. Como essa
generalização não exige a introdução de novos conceitos, o texto incide fundamentalmente na
identificação das variáveis e das equações que as relacionam, e na técnica usada para discretizar
a geometria do sólido em análise e para aproximar os campos de deslocamento, deformação etensão. Generaliza-se o conceito de elemento isoparamétrico e comenta-se brevemente o
processo utilizado na montagem da equação resolvente do Método dos Elementos Finitos.
Como a sistematização da aplicação do método é análoga à anteriormente descrita na sua
aplicação de estruturas articuladas e reticuladas, opta-se aqui por analisar as diferentes fases que
caracterizam a utilização de um programa de elementos finitos, dando-se especial atenção às
fases que dependem da intervenção directa do utilizador, ou seja a definição dos dados, a
avaliação da qualidade da malha de discretização gerada automaticamente e, principalmente, à
análise crítica dos resultados obtidos.
8/17/2019 AE2_Elasticidade2D_v4.pdf
3/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
3
2. Hipóteses
Na extensão da aplicação do Método dos Elementos Finitos para análise de problemas de
elasticidade plana e tridimensional continua-se a admitir que o material é elástico linear
(linearidade física) e que os deslocamentos e as deformações são infinitesimais (linearidade
geométrica). Continua-se também a admitir que são desprezáveis as forças de inércia e de
amortecimento que se possam desenvolver durante o carregamento da estrutura (comportamento
quase-estático).
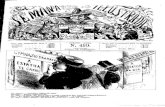
Relativamente à geometria da peça e a forma como é solicitada, consideram-se dois tipos de
problemas que podem ser adequadamente modelados recorrendo à formulação bidimensional da
Teoria da Elasticidade, designadamente, o comportamento de peças sujeitas a estados planos de
tensão ou a estados planos de deformação.Uma placa é uma peça laminar plana solicitada no próprio plano, com uma espessura
suficientemente pequena em relação às restantes dimensões características para justificar a
hipótese de serem desprezáveis as componentes correspondentes do tensor das tensões. Esta
hipótese é frequentemente utilizada na análise de paredes resistentes.
Se, pelo contrário, a peça é prismática com uma espessura muito maior que as dimensões da
sua secção transversal, em cujo plano actuam as cargas, torna-se legítimo assumir que as secções
se deformam no próprio plano, sendo desprezáveis as três componentes do tensor dasdeformações relativas à dimensão transversal. Esta é a hipótese adoptada, por exemplo, na
análise de muros de suporte e de secções de túneis.
Figura 1: Problemas de Elasticidade Plana e Tridimensional
Como se ilustra na Figura 1, o elemento estrutural é representado no plano em que actuam as
cargas, o qual corresponde ao plano médio da placa, num estado plano de tensão (EPT), ou a
z
y
x
L x
L y
L z
x
y
Ω
Γ
:
: z x y
z x y
L L L EPT
L L L EPD
≈
≈
≪
≫
y
z
x
V
: x y z E3D L L L≈ ≈
Γ
8/17/2019 AE2_Elasticidade2D_v4.pdf
4/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
4
secção transversal da peça prismática, num estado plano de deformação (EPD). A área ocupada
pela peça define o domínio, Ω , e a linha que a limita define a fronteira, Γ .
Quando as dimensões características da peça são da mesma ordem, ou quando o tipo de acção
torna inadequadas as hipóteses simplificativas sobre o estado de tensão ou de deformação, a peça
é analisada recorrendo à formulação tridimensional da Teoria da Elasticidade. O volume
ocupado pela peça define o domínio, Ω , e a superfície que a limita define a fronteira, Γ .
Para simplificar a apresentação, a aplicação do Método dos Elementos Finitos a problemas de
elasticidade é feita tratando primeiro a análise de estados planos, estabelecendo-se depois a
generalização da formulação para a análise de problemas tridimensionais.
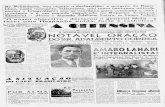
3. Variáveis
Em consequência das hipóteses que caracterizam os estados planos de tensão e de deformação, e
de acordo com a notação definida nas Figuras 1 e 2, o estado de tensão em cada ponto da peça é
definido por três componentes do tensor das tensões (simétrico), as quais são organizadas
matricialmente na forma,
xx
yy
xy
σ
σ
σ
=
s (1)
sendo nulas as restantes componentes nos estados planos de tensão: 0 xz yz zzσ σ σ = = = .
Figura 2: Convenção adoptada na medição de variáveis
O estado de deformação é definido pelas três componentes correspondentes do tensor das
deformações (simétrico), as quais são organizadas matricialmente de forma análoga,
xx
yy
xy
ε
ε γ
=
e (2)
x
y
, yy yyσ ε
, xy xyσ γ , xx xxσ ε
x
y
, x x f u
, y y f u
, y yt u
, x xt u
8/17/2019 AE2_Elasticidade2D_v4.pdf
5/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
5
em que 2 xy xyγ ε = representa a distorção total. As restantes componentes são nulas nos estados
planos de deformação: 0 xz yz zzγ γ ε = = = .
Relativamente às forças aplicadas, distinguem-se as forças de domínio ou de massa (equivalentes às cargas de vão das barras),
x
y
f
f
=
f (3)
e as forças de fronteira (equivalentes às forças de extremidade):
x
y
t
t
=
t
As forças de domínio podem ser distribuídas, na área ou em linha, ou concentradas, e asforças de fronteira distribuídas ou concentradas. Os deslocamentos correspondentes são
organizados de modo análogo:
x
y
u
u
=
u (4)
Variáveis estáticas Variáveis cinemáticas
Tensões, ( , )ij x yσ Deformações, ( , )ij x yε
Forças, ( , ), ( , )i i f x y t x y Deslocamentos, ( , )iu x y
Quadro 1: Variáveis correspondentes
Admite-se, em geral, que não existem momentos aplicados no plano do carregamento, 0 zm =
no domínio e na fronteira. A rotação correspondente é uma variável dependente, podendo ser
determinada a partir do campo de deslocamentos:
( )12 z y x x yu uω = − ∂ − ∂ (5)
4. Balanço Energético
De acordo com a notação anteriormente definida, são as seguintes as definições do trabalho
realizado pelas forças interiores e exteriores:
T ( + + )i xx xx yy yy xy xyW d d Ω Ω Ω ε σ ε σ γ σ Ω = =∫ ∫e s
T T ( ) ( )e x x y y x x y yW d d u f u f d u t u t d Ω Γ Ω Γ
Ω Γ Ω Γ = + = + + +∫ ∫ ∫ ∫u f u t (6)
A condição de balanço energético toma agora a seguinte forma:
T T Td d d
Ω Ω Γ Ω Ω Γ = +∫ ∫ ∫e s u f u t (7)
8/17/2019 AE2_Elasticidade2D_v4.pdf
6/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
6
Figura 3: Forças descontínuas e deslocamentos correspondentes
A definição (6) mantém-se válida quando se pretende calcular o trabalho realizado por forças
de domínio distribuídas ao longo de linhas e de forças de domínio e de fronteira concentradas,representando essas forças através de funções de Dirac. Na definição explícita que se obtém,
T T T TeW d d d
Ω Γ Γ Ω Γ Γ = + + +∫ ∫ ∫u f u t u f u F
ℓ
ℓ ℓ
f ℓ é a força distribuída aplicada sobre a linha Γ
ℓ e F o vector que lista as forças concentradas.
O vector u define, no primeiro caso, as componentes do deslocamento ao longo da linha Γ ℓ e,
no segundo, as componentes do deslocamento correspondentes às forças concentradas, como se
ilustra na Figura 3.
5. Equações Básicas
As equações que caracterizam um problema de Elasticidade Plana estão resumidas no Quadro 2,
analisando-se em seguida o significado das condições de domínio (8) a (10) e das condições de
fronteira (11) e (12).
Equilíbrio Elasticidade Compatibilidade
Domínio (8) Domínio (9) Domínio (10)T em Ω + = A s f 0 em Ω = s D e em Ω =e Au
Tt em Γ = N s t uem Γ =u u
Fronteira (11) Fronteira (12)
Quadro 2: Equações básicas
Estas equações são a seguir escritas explicitamente, sublinhando-se o significado das
condições físicas que impõem. Dá-se particular atenção às condições de fronteira, pois são
x x
y y
Γ ℓ
, f uℓ ℓ
, x xF u
, x xF u
, y yF u
, y yF u
8/17/2019 AE2_Elasticidade2D_v4.pdf
7/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
7
aquelas que mais directamente prestam informação sobre a qualidade das soluções aproximadas
que são obtidas utilizando o Método dos Elementos Finitos.
5.1 Condições de Domínio
A condição de equilíbrio no domínio assegura que a variação do campo de tensões equilibra, em
cada ponto, as forças de massa,
0
0 x xx y xy x
y yy x xy y
f em
f
σ σ Ω
σ σ
∂ + ∂ + =
∂ + ∂ + = (13)
enquanto a condição de compatibilidade no domínio define, em cada ponto, as medidas de
deformação em função da variação do campo de deslocamentos:
xx x x
yy y y
xy y x x y
uu em
u u
ε ε Ω
γ
= ∂ = ∂ = ∂ + ∂
(14)
Quando se admite que o material elástico linear é homogéneo e isotrópico, obtém-se a
seguinte definição para as relações constitutivas, isto é, as condições que definem, em cada
ponto, o estado de tensão provocado por um determinado estado de deformação,
2
2
( )1
( )1
2(1 )
xx xx yy
yy yy xx
xy xy
E
E em
E
σ ε ν ε ν
σ ε ν ε Ω ν
σ γ ν
= +
−
= +−
=
+
(15)
para estados planos de tensão, sendo E o módulo de elasticidade e ν o coeficiente de Poisson.
A relação constitutiva para estados planos de deformação é a seguinte:
1( )
1 2 11( )
1 2 1
2(1 )
xx xx yy
yy yy xx
xy xy
E
E em
E
ν σ ε ν ε
ν ν ν
σ ε ν ε Ω ν ν
σ γ ν
−= +
− +
−= +
− +
=+
(16)
As condições de equilíbrio, compatibilidade e de elasticidade (13) a (15) ou (16) estão
expressas matricialmente no Quadro 2, de acordo com as definições (1) e (2) para os vectores de
tensão e deformação e as definições (3) e (4) para os vectores das forças de domínio e dos
deslocamentos, respectivamente.
8/17/2019 AE2_Elasticidade2D_v4.pdf
8/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
8
As expressões que se encontram para os operadores diferenciais de compatibilidade e de
equilíbrio e para a matriz de rigidez são as seguintes:
0
0 x
y
y x
∂
= ∂ ∂ ∂
A
T0
0 x y
y x
∂ ∂ =
∂ ∂ A (17)
1 3 0
3 1 01
0 0 1
Gκ κ
κ κ κ
κ
+ −
= − + − −
D
em que / 2(1 )G E ν = + é o módulo de distorção, com (3 )/(1 )κ ν ν = − + para estados planos de
tensão e 3 4κ ν = − para estados planos de deformação, respectivamente.
A relação de elasticidade (9) pode ser generalizada para incluir o efeito de campos residuais:
( )r r em Ω = − + s D e e s (18)
As tensões residuais,r s , resultam normalmente de erros de fabrico. Um exemplo típico da
utilização do campo de deformações residuais, r e , é a modelação de variações térmicas, sendo,
{ }T 0r T T α ∆ α ∆=e
para materiais homogéneos e isótropos, em que α é o coeficiente de dilatação térmica e
( , )T x y∆ a variação de temperatura.
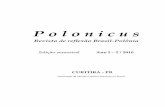
Exercício 1: Considere a consola triangular representada na Figura 4. Admitindo ser o
seguinte o campo de deslocamentos,
( , ) 0
( , ) ( / )
x
y
u x y
u x y x L d
=
=
(19)
com 2,6 / ( )d E m= − , verifique que, para um estado plano de tensão, são as seguintes as
definições dos campos de deformação e de tensão (corte puro),
( , ) ( , ) 0; ( , ) 2,6 / xx yy xy x y x y x y E ε ε γ = = = − (20)
2( , ) ( , ) 0; ( , ) 1 ( ) xx yy xy x y x y x y kNmσ σ σ −
= = = − (21)
calculadas recorrendo às condições de compatibilidade (14) e de elasticidade (15). Confirme
ainda que a condição de equilíbrio no domínio (13) só é verificada para forças de massa nulas:
0 x y f f = = (22)
8/17/2019 AE2_Elasticidade2D_v4.pdf
9/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
9
a) Geometria e material b) Deformada
c) Estado de deformação d) Estado de tensão
e) Forças segundo x f) Forças segundo y
Figura 4: Consola triangular com campo de deslocamentos linear
5.2 Condições de FronteiraAs restantes equações resumidas no Quadro 2 definem as condições de fronteira estáticas (11) e
as condições de fronteira cinemáticas (12). Essas condições também são designadas por
condições de Neumann (ou condições de fronteira naturais) e por condições de Dirichlet (ou
condições de fronteira essenciais), respectivamente.
A fronteira da peça, Γ , é decomposta nas duas regiões em que essas condições são impostas,
a fronteira estática t Γ (ou de Neumann) e a fronteira cinemática uΓ (ou de Dirichlet). Essas
regiões são complementares, t uΓ Γ Γ = ∪ e t uΓ Γ ∅ = ∩ , por não ser fisicamente possívelimpor num ponto simultaneamente uma força e o deslocamento correspondente.
x
y
L
L
2
1
0,3
. ( )
L m
E const kNm
ν −
=
=
=
xu
yu
x
y
2,6 / ( )d E m=
( , ) 0
( , ) ( / ) x
y
u x y
u x y x L d
=
=
x
y
2,6/ xy E γ = −
0 xx yyε ε = =
y
x
21( ) xy kNmσ
−= −
0 xx yyσ σ = =
1 xt = −
12 x
t = +0 xt =
0 x f =
0 y f =
0 yt =
1 yt = + 12 y
t = −
8/17/2019 AE2_Elasticidade2D_v4.pdf
10/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
10
A condição de fronteira estática (11) define o estado de tensão na fronteira que equilibra as
forças aplicadas. A forma explícita dessa equação é a seguinte,
x xx y xy x
t y yy x xy y
n n t
emn n t
σ σ
Γ σ σ
+ =
+ = (23)
em que xn e yn representam as componentes da normal exterior unitária, como se ilustra na
Figura 5. Quando esta condição é expressa matricialmente, conclui-se que a matriz de equilíbrio
na fronteira é análoga à matriz de equilíbrio no domínio (17), sendo obtida substituindo a
componente da normal unitária exterior o operador diferencial correspondente:
T0
0 x y
y x
n n
n n
=
N (24)
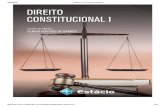
Figura 5: Normal exterior unitária Figura 6: Condições de fronteira
A fronteira estática da placa representada na Figura 6 é definida pelas linhas de contorno ABC
e DEF , devendo aí ser impostas as seguintes condições:
1 12 2
1 12 2
( ) ( ) 0
( ) ( ) 0
xx xy x
AB
yy xy y
t em
t
σ σ Γ
σ σ
+ + − = =
− + + = =
( 0) ( 1) 0
( 1) (0) 0 xx xy x
BC
yy xy y
t em
t
σ σ Γ
σ σ
+ − = =
− + = =
( 0 ) (1) 0
(1) ( 0) xx xy x
DEF
yy xy y
t em
t p
σ σ Γ
σ σ
+ = =
+ = = −
A condição de compatibilidade na fronteira, a equação (12), assegura que os deslocamentos
medidos no domínio, junto ao contorno, são coerentes com os deslocamentos que aí estejam
impostos. A forma explícita dessa condição é a seguinte,
x
y
n
n
xn
xn
yn
yn
( )2 2 1 x yn n+ =
A
C
DF
x
y
B
E
p
xxσ
yyσ
xyσ
12 x
n = +
12 yn = −
8/17/2019 AE2_Elasticidade2D_v4.pdf
11/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
11
x x
u
y y
u uem
u uΓ
=
=
ou, para o exemplo da Figura 6:
0
0 x x
AF
y y
u uem
u uΓ
= =
= =
Ilustra-se na mesma figura um terceiro tipo de condição de fronteira, a condição de fronteira
mista ao longo do bordo CDΓ , em que é imposta uma força e a componente complementar do
deslocamento correspondente:
0
(0) (1) 0 x x
CD
yy xy y
u uem
t Γ
σ σ
= =
+ = =
Esta condição de fronteira resulta, normalmente, de simplificações de simetria. A expressão
complementar definiria a condição de fronteira decorrente de uma condição de anti-simetria:
(1) (0 ) 0
0 xx xy x
y y
t
u u
σ σ + = =
= =
Exercício 2: Verifique serem as forças de fronteira representadas na Figura 4 que equilibram
o campo de tensões aí definido. Confirme que essas forças estão globalmente em equilíbrio,
isto é, têm resultantes nulas e produzem um momento nulo em torno do eixo ortogonal aoplano.
Em vez de impor uma força ou o deslocamento correspondente, é possível impor uma relação
entre a força e o deslocamento. Este tipo de condição de fronteira, também designada por
condição de Robin, é utilizado para simular o comportamento de apoios elásticos, como se
ilustra na Figura 7. A condição é escrita na forma,
e eem Γ = t D u (25)
reunindo a matriz e D os coeficientes de rigidez que caracterizam a deformabilidade do meio de
apoio.
Figura 7: Apoio elástico
eΓ
8/17/2019 AE2_Elasticidade2D_v4.pdf
12/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
12
5.3 Fronteiras Interiores
Interessa referir, ainda, as condições de fronteira que são artificialmente introduzidas quando a
peça é discretizada em elementos finitos, como seria, por exemplo, o segmento BE se a consola
representada na Figura 5 fosse discretizada em dois elementos, como se mostra na Figura 8.
Figura 8: Fronteira interior Figura 9: Elemento de junta
As condições nesta fronteira devem garantir a continuidade dos deslocamentos,
j k
iem Γ =u u (26)
em que os índices j e k identificam dois elementos que partilham a fronteira interior iΓ , assim
como o equilíbrio das forças em qualquer ponto da fronteira,
j k
iem Γ + = t t t (27)
sendo t a força aplicada exteriormente sobre a fronteira ( = t 0 no exemplo da Figura 8).
As forças na fronteira de um elemento são calculadas recorrendo à condição de equilíbrio na
fronteira (11), a qual é válida para qualquer secção do domínio da peça,
j j
iem para o elemento jΓ =σ σσ σ N t
em que N é a matriz de equilíbrio (24) escrita para a fronteira iΓ do elemento j e j
t o vector
das forças que nessa fronteira equilibram o estado de tensão no elemento.
Ou seja, se se seccionar uma peça, na representação de corpo livre daí resultante as forças
(indeterminadas) que se aplicam na secção de corte são calculadas em função do campo de
tensão recorrendo à equação (11). O conceito é idêntico ao utilizado na definição de diagramas
de corpo livre de peças lineares, em que se aplica na secção de corte como força exterior o
esforço aí existente.
Como as normais exteriores de dois elementos que partilham a mesma fronteira interior são
simétricas, a condição de equilíbrio (27) pode ser expressa directamente em termos do estado de
tensão em cada elemento na forma:
E
y
B
x
1 1, x xt u 2 2, x xt u
2 2, y yt u1 1, y yt u
B
E
y
x
8/17/2019 AE2_Elasticidade2D_v4.pdf
13/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
13
( ) j k iem Γ − =σ σ σ σ σ σ σ σ N t (28)
É importante notar que, em consequência desta equação, as três componentes do estado de
tensão em cada elemento são relacionadas por apenas duas condições, e não as três que seriam
necessárias para estabelecer o equilíbrio em termos de tensões. Ou seja, permite que o estado de
tensão entre dois elementos seja diferente, j k ≠σ σ σ σ σ σ σ σ na fronteira que partilham, iΓ , mesmo que
seja nula a força exterior aí aplicada, = t 0 . Portanto, este enfraquecimento da condição de
continuidade do campo de tensão na peça, j k =σ σ σ σ σ σ σ σ se = t 0 , resulta directamente da
discretização da peça em dois elementos distintos.
Exercício 3: Verifique que a condição (28) escrita para a fronteira entre os dois elementos do
exemplo ilustrado na Figura 7 impõe as condições de continuidade 1 2 xx xxσ σ = e
1 2 xy xyσ σ = mas
permite que 1 2 yy yyσ σ ≠ :
1 2
1 2
1 2
1 0 0 0
0 0 1 0
xx xx
yy yy
xy xy
em BE
σ σ
σ σ
σ σ
−
− −
=
Exercício 4: Os elementos de junta (unidimensionais, isto é, sem espessura em problemas
planos, como se ilustra na Figura 9) são usados para modelar diferentes condições de contactoentre elementos. Escreva a condição de fronteira entre dois elementos ligados entre si por um
elemento de junta com as seguintes propriedades: a) Impede o afastamento mas permite o
deslizamento entre elementos, sem atrito; b) Impede o afastamento mas permite o
deslizamento entre elementos, com atrito; c) Permite o movimento elástico entre elementos.
6. Soluções Exactas e Aproximadas
Mantêm-se as classificações anteriormente definidas para os diferentes tipos de solução do
sistema de equações (8) a (12), resumidas no Quadro 2:
• Um campo de tensões, s , que satisfaz as condições de equilíbrio no domínio (8) e na
fronteira (11), incluindo as fronteiras interiores, é, por definição, uma solução
estaticamente admissível;
• Um campo de deslocamentos, u , que é contínuo no domínio da peça e que satisfaz as
condições de fronteira (12), incluindo as fronteiras interiores, é, por definição, uma solução
cinematicamente admissível, sendo o campo de deformações compatível associado, e ,
definido pela condição de compatibilidade no domínio (10);
8/17/2019 AE2_Elasticidade2D_v4.pdf
14/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
14
• A solução exacta é a solução que para além de ser estática e cinematicamente admissível
satisfaz também a relação de elasticidade (9);
• A solução exacta existe e é única, mas pode não ter expressão analítica.
Para o exemplo da consola triangular definido na Figura 4, o campo de deslocamentos (19)
define uma solução cinematicamente admissível, pois é continuo no domínio da peça, satisfaz a
condição de fronteira cinemática ao longo do bordo encastrado,
( 0) : 0u x y x u uΓ = = = (29)
e está associado a um campo de deformações (20) compatível.
Para o mesmo problema, o campo de tensões (21) define uma solução estaticamente
admissível se se admitir que as forças de massa são nulas, de acordo com a condição (22), e,ainda, se as forças exteriores aplicadas equilibrarem esse campo de tensões, ou seja, se as
condições de fronteira estáticas forem as seguintes:
1 12 2
( 1) : 1; 0
( ) : ;
t x y
t x y
y t t
y x t t
Γ
Γ
= = − =
= = + = − (30)
Nestas condições, a solução é exacta e única, pois os campos de tensão e de deformação
satisfazem também localmente a relação de elasticidade. As reacções no bordo encastrado da
consola são determinadas calculando as forças que aí equilibram o campo de tensão (21):( 0) : 0; 1u x y x t t Γ = = = (31)
Figura 10: Placa carregada transversalmente Figura 11: Placa carregada axialmente
É muito limitado o número de problemas com relevância prática que têm solução analítica,
mesmo quando a geometria da peça e as condições de fronteira são muito simples. Por exemplo,
a consola carregada transversalmente ilustrada na Figura 10 não tem solução analítica exacta, e o
caso mais simples da carga de tracção uniforme só tem solução analítica exacta quando se
desprezam as forças de massa e o efeito de Poisson.
x
y
a
b
p
x
y
a
b
p
8/17/2019 AE2_Elasticidade2D_v4.pdf
15/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
15
Exercício 5: Considere a placa carregada axialmente representada na Figura 11 e verifique o
seguinte, admitindo um estado plano de tensão: a) A solução ( /a) xu x d = , 0 yu = é uma
solução cinematicamente admissível; b) A solução xx pσ = , 0 yy xyσ σ = = é uma solução
estaticamente admissível quando se desprezam as forças de massa, 0 x y f f = = ; c) Essas
soluções definem a solução exacta, com / d a p E = , quando se despreza o efeito de Poisson.
Para melhor esclarecer as razões que, por regra, impedem a determinação de soluções exactas
para problemas de elasticidade plana (e tridimensional), é conveniente eliminar variáveis e
compactar as equações (8) a (12) que governam o problema, tal como resumidas no Quadro 2.
Tal como se fez para as peças lineares, a condição de compatibilidade no domínio (10) é
usada para eliminar as deformações na condição de elasticidade (9), recorrendo-se à expressão
resultante para o campo de tensões,
em Ω s = D Au
para exprimir as condições de equilíbrio no domínio (8) e na fronteira (11) em função dos
deslocamentos, e juntando a única condição ainda omissa, a condição de fronteira (12):
T em Ω + = A D Au f 0 (32)
Tt em Γ = N D Au t (33)
uem Γ =u u (34)
Qualquer solução do sistema de equações diferenciais (32) satisfaz localmente (ou de maneira
forte) todas as condições de domínio do problema, designadamente as condições de equilíbrio
(8), de elasticidade (9) e de compatibilidade (10).
A técnica geralmente usada para obter essas soluções consiste em combinar as soluções
complementar e particular,
0c em Ω = +
u u u definindo a primeira o conjunto das soluções da equação homogénea,
Tc em Ω = A D Au 0
e a segunda uma qualquer solução que represente o efeito das forças de massa:
T0 em Ω + = A D Au f 0
Estas soluções da equação de Navier (32) foram há muito estabelecidas para materiais
homogéneos e isotrópicos, recorrendo a potenciais de deslocamento (funções cujas derivadas
definem o campo de deslocamento, u) ou a potenciais de tensão (funções cujas derivadas
8/17/2019 AE2_Elasticidade2D_v4.pdf
16/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
16
definem o campo de tensão, s). Existem também soluções para materiais homogéneos
anisótropos, sendo mais limitados os casos resolvidos para materiais heterogéneos.
Na maioria das aplicações, a dificuldade de obter soluções exactas para problemas de
elasticidade plana (e tridimensional) não está, portanto, na determinação das soluções da equação
de Navier (32). A dificuldade está em conseguir que essas soluções satisfaçam, também de
maneira forte, as condições de fronteira do problema, definidas pelas equações (33) e (34).
7. Método dos Elementos Finitos
O modelo de deslocamento do Método dos Elementos Finitos é a seguir utilizado para
determinar soluções aproximadas do problema de elasticidade plana definido pelas equações
resumidas no Quadro 2, ou pelo sistema equivalente definido pelas equações (32) a (34). A
aplicação do método é conceptualmente idêntica à adoptada na análise de estruturas reticuladas,
podendo ser resumida em quatro fases:
Primeira fase: Aproximações
• A estrutura é discretizada em elementos finitos;
• O campo de deslocamentos é aproximado em cada elemento usando funções contínuas, na
forma,
=Ψ ΨΨ Ψ u d (35)sendo Ψ ΨΨ Ψ a matriz que reúne as funções de aproximação e d o vector dos deslocamentos
nodais do elemento;
• A condição de compatibilidade (10) é imposta localmente para definir a aproximação do
campo de deformações em cada elemento:
=e B d (36)
= Ψ ΨΨ Ψ B A (37)
•
A relação de elasticidade (9) é imposta localmente para definir o campo de tensões em
cada elemento:
= s DB d (38)
Segunda fase: Forças Nodais Equivalentes
• A equação resolvente do elemento é estabelecida interpretando-a como uma condição de
equilíbrio de forças nodais equivalentes,
= K d F (39)
reunindo a matriz de rigidez do elemento as forças devidas aos deslocamentos nodais,
8/17/2019 AE2_Elasticidade2D_v4.pdf
17/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
17
T d Ω
Ω = ∫ K B D B (40)
e o vector,
f t n= + +
F F F F (41)as forças nodais equivalentes às forças de massa,
T f d Ω
Ω = ∫ Ψ ΨΨ Ψ F f (42)
as forças nodais equivalentes às forças aplicadas na fronteira,
Tt d Γ
Γ = ∫ Ψ ΨΨ Ψ F t (43)
e as forças concentradas aplicadas nos nós do elemento,n F .
Terceira fase: Equação Resolvente
• A solução aproximada em cada elemento está sujeita à condição de ser cinematicamente
admissível, sendo construída de maneira a satisfazer localmente (ou de maneira forte) a
condição de fronteira cinemática (34) da malha de elementos finitos e, ainda, a condição
equivalente (26) entre elementos;
• Essa condição é imposta relacionando os deslocamentos nodais dos elementos, d , com os
deslocamentos nodais da malha de elementos finitos, q, através de uma condição de
incidência nodal:= ℑ ℑℑ ℑ d q (44)
• As forças nodais equivalentes na malha de elementos finitos definem as resultantes das
contribuições das forças nodais equivalentes geradas em cada elemento,
T= ℑ ℑℑ ℑ Q F (45)
e são utilizadas para estabelecer a equação resolvente do problema:
* = K q Q (46)
•
Este sistema de equações define as condições de equilíbrio das forças nodais equivalentes,
impondo aproximadamente (ou de maneira fraca) as condições de equilíbrio no domínio
(8) e na fronteira estática (11), ou as equações equivalentes (32) e (33), estendidas de modo
a incluírem as condições de equilíbrio (28) nas fronteiras entre elementos.
Quarta fase: Análise da Solução
• Resolvido o sistema (46) nas incógnitas do problema, os deslocamentos nodais da malha
de elementos finitos, q, os deslocamentos, as deformações e as tensões são calculadas em
cada elemento recorrendo às aproximações (35), (36) e (38), depois de determinar osdeslocamentos nodais em cada elemento através da relação de incidência (44).
8/17/2019 AE2_Elasticidade2D_v4.pdf
18/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
18
Este procedimento é a seguir apresentado e interpretado recorrendo a um exemplo simples,
sendo posteriormente sistematizado. Discute-se a definição das funções que são utilizadas para
estabelecer a aproximação em que o método se baseia, a aproximação (35) do campo de
deslocamento em cada elemento. Essa generalização da aproximação é depois utilizada para
ilustrar as operações (44) e (45) de reunião de elementos de que decorre a formulação da
equação resolvente (46) para uma malha de elementos finitos.
Exercício 6: Deduza a equação resolvente elementar (39) e obtenha as definições (40) a (43)
impondo as aproximações (35), (36) (38) na condição de balanço energético (7). Recupere os
mesmos resultados estacionarizando a energia potencial do elemento:
T T T T12 Min d d d
Ω Ω Γ
Π Ω Ω Γ = − − −
∫ ∫ ∫e s u f u t u F
Exercício 7: Generalize a expressão da equação resolvente (39) para incluir a definição do
vector das forças nodais equivalentes a campos de deformação e de tensão residuais (18):
T ( )r r r d Ω
Ω = −∫ F B s D e (47)
Exercício 8: Mostre ser a seguinte a contribuição de uma fronteira elástica (25) para a matriz
de rigidez elementar:
T
e
e e ed Γ
Γ =
∫ Ψ Ψ Ψ Ψ Ψ Ψ Ψ Ψ K D (48)
8. Exemplo de Introdução
O exemplo de aplicação escolhido é o problema de estado plano de tensão representado na
Figura 4, em que se despreza o efeito das forças de massa ( 3kNm− ), como estabelece a condição
(22), e se considera o carregamento indicado na Figura 12a).
De acordo com a identificação das fronteiras definida na Figura 12b), a placa triangular está
encastrada no bordo 0 x = , sujeita a uma carga uniforme transversal no bordo 1 y = , definindo o
lado y x= um bordo livre. A condição de fronteira cinemática (29) mantém-se válida, sendo a
condição de fronteira estática (30) substituída pela seguinte:
( 1) : 0; 1
( ) : 0t x y
t x y
y t t
y x t t
Γ
Γ
= = = −
= = = (49)
Este exemplo é resolvido admitindo a mais simples aproximação possível. A placa é
discretizada num único elemento em que se admite ser linear a variação do campo de
deslocamentos, descrita pelos deslocamentos do vértice livre da consola, os deslocamentos
nodais 1d e 2d identificados na Figura 12c).
8/17/2019 AE2_Elasticidade2D_v4.pdf
19/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
19
a) Carregamento b) Fronteiras
c) Aproximação dos deslocamentos d) Aproximação das tensões
Figura 12: Consola triangular sujeita a uma carga transversal uniforme
Como se usa apenas um elemento, este exemplo não serve para ilustrar as operações de
reunião de elementos para formar a malha de discretização, definidas pelas condições de
incidência nodal (44) e (45), as quais são analisadas posteriormente. O que se pretende ilustrar
são os dois aspectos fundamentais da formulação de deslocamento do Método dos Elementos
Finitos aplicado à solução de problemas de elasticidade plana:
• A solução aproximada é construída de maneira a ser cinematicamente admissível, sendo
escrita em função dos deslocamentos nodais, os deslocamentos 1d e 2d identificados na
Figura 12c);
• A aproximação resultante para o campo de tensões, definida na Figura 12d), viola, em
geral, as condições de equilíbrio, sendo o equilíbrio imposto sobre forças nodais
equivalentes às forças de massa e de fronteira, as forças 1F e 2F indicadas na mesma
figura.
8.1 Aproximação dos Deslocamentos
A hipótese do campo de deslocamentos variar linearmente no domínio do elemento é formulada
da seguinte maneira ( 1 ) L m= ,
x
y
1m
1m 0,3
. E const
ν =
=
21 ( ) p kNm−=
( 1)t yΓ =
( 0)u xΓ =
( )t y xΓ =
x
y
1m
1m
1d
2d
xu
yu
1
2
( )
( ) x
y
u x d
u x d
=
=
x
y
1m
1m xx
σ
yyσ
xyσ
2F
1F
1
1
2
(1,099 )
(0, 330 )
(0, 385 )
xx
yy
xy
E d
E d
E d
σ
σ
σ
=
= =
8/17/2019 AE2_Elasticidade2D_v4.pdf
20/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
20
0 1 2
0 1 2
( , ) ( / ) ( / )
( , ) ( / ) ( / ) x
y
u x y a x L a y L a
u x y b x L b y L b
= + +
= + +
sendo importante notar que apenas as componentes de translação do movimento são
aproximadas independentemente. A componente de rotação é uma variável dependente. É
calculada pela equação (5), encontrando-se:
11 22 ( ) z b aω = −
Esta aproximação permite representar os três movimentos de corpo rígido no plano,
designadamente duas translações, 0 0a ≠ com 1 2 0a a= = e 0 0b ≠ com 1 2 0b b= = , e uma
rotação, 2 1 0a b≠ ≠ , e, ainda, a mais simples aproximação para o campo de deformações, o
estado de deformação constante, que adiante se define.Os pesos das funções de aproximação, ia e ib , são escolhidos usando critérios análogos aos
adoptados na formulação dos elementos finitos para peças lineares. São definidos impondo
localmente a condição de fronteira cinemática (29),
0 2 0 2 0a a b b= = = =
a qual elimina as componentes de corpo rígido, e escolhidos de modo a representar as
componentes do deslocamento num nó do elemento, neste caso o vértice livre da placa,
1 1 1
2 1 2
(1,1)(1,1)
x
y
d u a d
d u b d = ⇒ == ⇒ =
ver Figura 12c), obtendo-se a seguinte expressão para a aproximação (35) do campo de
deslocamentos:
1
2
0
0 x
y
u d x
u d x
=
(50)
Sendo o campo de rotação dependente das componentes de translação, as rotações dos nós
não são escolhidas como incógnitas do problema, sendo o vector dos deslocamentos nodaispresente na definição (35) sempre definido em termos das componentes de translação medidas
no referencial global da estrutura.
8.2 Aproximação das Deformações e das Tensões
Em consequência das condições anteriormente impostas sobre a aproximação dos deslocamentos
(50), para assegurar que essa aproximação define uma solução cinematicamente admissível no
sentido forte, isto é, em todos os pontos do domínio da placa e da sua fronteira cinemática, basta
definir a aproximação do campo de deformações impondo localmente a condição de
compatibilidade no domínio (14), encontrando-se o seguinte resultado para a definição (36):
8/17/2019 AE2_Elasticidade2D_v4.pdf
21/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
21
1
2
1 0
0 0
0 1
xx
yy
xy
d
d
ε
ε
γ
=
(51)
Como o campo de deformações é constante, a aproximação (38) que resulta para o campo de
tensões impondo localmente as relações de elasticidade (15) é:
1
2
1,099 0
0,330 0
0 0,385
xx
yy
xy
E d
E d
E
σ
σ
σ
=
(52)
8.3 Condições de Equilíbrio no Domínio e na Fronteira
Como a aproximação linear do campo de deslocamentos está associada a uma aproximação
constante (52) para o campo de tensões e se admite que as forças de massa (22) são nulas,
conclui-se que (contra o que geralmente sucede) a condição de equilíbrio (13) é localmente
satisfeita neste exemplo de aplicação.
a) Forças segundo x b) Forças segundo y
Figura 13: Forças de massa e de fronteira equilibradas pela aproximação do campo de tensões
No entanto, quando se recorre à definição (23) para calcular as forças na fronteira que
equilibram o estado de tensão,
2
1
1
(0, 385 )0 0 1( 1) :
(0, 330 )0 1 0
xx
x
yy
y
xy y
t E d y
t E d
σ
Γ σ
σ =
= = =
1 12 2 1 2
1 11 22 2
0 (0,777 ) (0,272 )( ) :
(0, 233 ) (0,272 )0
xx
x
yy
y
xy y x
t E d E d y x
t E d E d
σ
Γ σ
σ
+ −
− +
=
+ −
= = = − +
2(0, 385 ) E d
1(1,099 ) E d
1
2
(0, 777 )
(0, 272 )
E d
E d
+
−
0 x f =
1(0, 330 ) E d
2(0, 385 ) E d
1
2
(0, 233 )
(0, 272 )
E d
E d
−
+
0 y f =
8/17/2019 AE2_Elasticidade2D_v4.pdf
22/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
22
1
2
0
(1,099 )1 0 0( 0) :
(0, 385 )0 0 1
xx
x
yy
y
xy x
t E d x
t E d
σ
Γ σ
σ =
−−
= = = −−
conclui-se que não é possível escolher valores para os graus de liberdade do problema, os
deslocamentos nodais 1d e 2d , que permitam impor localmente as condições de fronteira
estáticas (49), como se ilustra na Figura 13.
Para obter uma solução aproximada útil torna-se necessário impor as condições de equilíbrio
de uma maneira fraca, recorrendo-se novamente ao critério de determinar os deslocamentos
nodais equacionando o trabalho das forças interiores ao das forças exteriores.
8.4 Equação ResolventeA equação (39) que se obtém aplicando esse critério (ver Exercício 6) tem a seguinte expressão:
1
2
0,5(1,099 ) 0 0
0 0,5(0,385 ) 0,5
d E
d E
=
− (53)
A matriz de rigidez é calculada aplicando a definição (40), explorando o facto de serem
constantes os campos de tensão e de deformação no domínio da consola triangular (com área
20,5mΩ = ):
1 1T T T
01 0,5
xd dy dx
Ω Ω = = =∫ ∫ ∫ K B D B B D B B D B
11 12
21 22
0,5(1,099 ) 0
0 0,5(0,385 )
K K E
K K E
= =
K (54)
Como as forças de massa são nulas, = f 0 em Ω , e não existem forças aplicadas no nó livre
da consola, só a força transversal (49) contribui para o vector das forças nodais equivalentes (41)
obtendo-se o seguinte resultado aplicando as definições (42) e (43):
1
1
00,5
F F
= −
F = (55)
T1 1
0
00 0
00 0 x
f x
y
f xdydx
f x
= =
= ∫ ∫ F =
T T1 1
0 0
0 00 0 0
1 00 0 0,5 x x
t
y y y =1 y = x
t t x xdx dx
t t x x
= = + = = − = −
∫ ∫ F =
8/17/2019 AE2_Elasticidade2D_v4.pdf
23/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
23
8.5 Interpretação da Equação Resolvente
Na interpretação dada ao sistema resolvente (53) no contexto da aplicação do Método dos
Deslocamentos na análise de estruturas reticuladas, cada equação define uma condição de
equilíbrio entre dois conjuntos de forças nodais, as forças nodais devidas aos deslocamentos
nodais iq e as forças nodais aplicadas, iF .
a) Acção de 1 1d = b) Acção de 2 1d = c) Acção do carregamento
Figura 14: Interpretação dos termos da equação resolvente
Como se ilustra na Figura 14, continua a ser possível interpretar o coeficienteijK da matriz
de rigidez K como a força nodal iF devida ao deslocamento nodal 1 jq = e, no termo
independente do sistema (53), os coeficientes do vector de forças nodais F como sendo as
forças nodais iF aplicadas. A diferença essencial é que essas forças nodais representam agora
forças concentradas equivalentes às que equilibram o campo de tensões no domínio e na
fronteira do domínio bidimensional agora em análise.
Nas Figura 15a) e 15c) definem-se os sistemas de forças que equilibram a aproximação das
tensões devidos aos deslocamentos unitários, de acordo com os resultados apresentados na
Figura 13, e nas Figuras 15b) e 15d) definem-se as forças nodais equivalentes.
Sendo nulas as forças de massa e linear a aproximação do campo de deslocamentos, essas
forças são calculadas, como adiante se mostra, determinando a resultante das forças de fronteira
e atribuindo metade dessa resultante a cada nó de extremidade.
1 1d =
2 1d =
1m
1m
1 p =
11K
21K
12K
22K
1F
2F
8/17/2019 AE2_Elasticidade2D_v4.pdf
24/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
24
a) Forças de domínio e de fronteira devidas a 1 1d =
b) Forças nodais equivalentes devidas a 1 1d =
c) Forças de domínio e de fronteira devidas a 2 1d =
d) Forças nodais equivalentes devidas a 2 1d =
Figura 15: Forças nodais equivalentes devidas à aproximação do deslocamento
0,777 xt E = +
0 xt =
0 x f =1,099 xt E = −
0 y f =0 yt =
0,330 yt E = +
0,233 yt E = −
0
12 ( 1,099 ) E −
0
22
12
( 0,777 )
( 1,099 )
E
E
+
= +
0
0
12 ( 0,330 ) E +
22
12
( 0, 233 )
( 0,330 )
E
E
−
= −
0 x f =
0,385 xt E = +
0,272 xt E = −
0 xt = 0 y f =
0 yt =
0,272 yt E = +
0,385 yt E = −
0
0
12 ( 0,385 ) E +
22
12
( 0,272 )
( 0,385 )
E
E
−
= −
0
0
12 ( 0,385 ) E −
22
12
( 0, 272 )
( 0,385 )
E
E
+
= +
8/17/2019 AE2_Elasticidade2D_v4.pdf
25/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
25
Os resultados das Figuras 15b) e 15d) recuperam a definição (54) da matriz de rigidez,
mostrando que:
• As forças nodais equivalentes 1F e 2F devidas ao deslocamento 1 1d = são
211 20 (0,777 ) 0,5(1,099 )K E E = + = e
2121 2 2( 0,330 ) ( 0,233 ) 0K E E = + + − = ;
• As mesmas forças devidas ao deslocamento 2 1d = são, respectivamente,
2112 2 2( 0,330 ) ( 0, 233 ) 0K E E = − + + = e
222 20 (0,272 ) 0,5(0,385 )K E E = + = .
Quando se aplica o mesmo critério para determinar as forças nodais equivalentes ao
carregamento da consola obtém-se a definição (55), como se ilustra na Figura 16.
a) Carregamento b) Forças equivalentes
Figura 16: Forças nodais equivalentes ao carregamento
8.6 Análise da Solução
Depois de calcular a solução do sistema (53), 1 0d = e 2 2,6 / ( )d E m= − , aplicam-se as
definições (50) a (52) para determinar as aproximações dos deslocamentos, deformações e
tensões. A solução que assim se obtém está representada na Figura 4, concluindo-se que:
• A solução é cinematicamente admissível e produz uma aproximação coerente para a
deformada, ilustrada na Figura 4b);
• Como a aproximação dos deslocamentos é linear e o material homogéneo e isótropo,
obtém-se uma aproximação constante para o campo de tensões, definida na Figura 4d);
• Essa aproximação verifica (neste caso particular) a condição de equilíbrio no domínio (por
serem nulas as forças de massa), mas viola as condições de equilíbrio na fronteira;
• O carregamento dado, representado na Figura 12a) e definido pelas condições de fronteira
(49), não é recuperado pelo sistema de forças que equilibra na fronteira estática a
aproximação do campo de tensão, definido nas Figuras 4e) e 4f) e que corresponde ao
carregamento definido na Figura 17;
1m
21 p kNm−=
1
0,5 kNm−
8/17/2019 AE2_Elasticidade2D_v4.pdf
26/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
26
• No entanto, esses dois sistemas de forças têm as mesmas forças nodais equivalentes, como
se ilustra na Figura 18, por ser apenas isso o que se impõe ao estabelecer a equação
resolvente (39) do Método dos Elementos Finitos.
Figura 17: Forças na fronteira emequilíbrio com a aproximação das tensões
Figura 18: Forças nodais equivalentes àsforças dadas e às forças calculadas
8.7 Refinamento e Convergência
Tal como se fez na análise de estruturas reticuladas, as soluções obtidas para problemas de
elasticidade plana podem ser melhoradas mantendo o grau de aproximação e aumentando o
número de elementos de discretização da peça (refinamento-h), ou mantendo a malha de
discretização e aumentando o grau da aproximação (refinamento-p).Na Figura 19 apresentam-se as soluções obtidas para o problema da consola quando se
subdivide a malha e se mantém o grau de aproximação (linear) em cada elemento. A solução
mais refinada aí apresentada, em que se nota a localização da concentração de tensões nos cantos
da secção de encastramento, está já muito próxima da solução exacta.
A análise desses resultados permite estabelecer conclusões análogas às obtidas na análise de
peças lineares:
•
A convergência em deslocamentos é relativamente rápida, sendo muito mais lenta aconvergência em tensões (a convergência para a função que se aproxima directamente é
mais rápida do que a convergência para a sua derivada);
• A solução é localmente compatível, no domínio e na fronteira, mas mais rígida do que a
solução exacta (subestima o deslocamento máximo);
• A solução é localmente desequilibrada, no domínio e na fronteira, e não está do lado da
segurança (subestima a tensão máxima);
•
A convergência para a solução exacta é ainda fraca sempre que se reconhece a malha deelementos finitos na representação dos campos de tensão (desequilíbrio entre elementos).
1m
1m
21 kNm−
21 kNm−
12 0,5F kNm
−= −
1 0F =
8/17/2019 AE2_Elasticidade2D_v4.pdf
27/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
27
1 elemento 4 elementos 384 elementos 15000 elementos
Figura 19: Refinamento-h da solução da consola triangular (elementos lineares)
A segunda opção de refinamento (refinamento-p) está ilustrada nas Figuras 20 e 21 para o
exemplo da consola quadrada ( )a b= representada na Figura 10. O problema é resolvido com
elementos de 3 nós (aproximação linear dos deslocamentos) e 6 nós (aproximação quadrática),
os quais são adiante definidos. As duas malhas têm o mesmo número de nós livres, pelo que os
sistemas resolventes (46) correspondentes envolvem o mesmo número de incógnitas (dois
deslocamentos por nó livre).
8/17/2019 AE2_Elasticidade2D_v4.pdf
28/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
28
512 elementos lineares 128 elementos quadráticos
Figura 20: Solução da consola quadrada com elementos lineares e quadráticos (289 nós)
512 elementos lineares 128 elementos quadráticosFigura 21: Solução da consola quadrada com elementos lineares e quadráticos (289 nós)
8/17/2019 AE2_Elasticidade2D_v4.pdf
29/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
29
Ambas as soluções são cinematicamente admissíveis mas qualquer delas ainda está longe de
aproximar correctamente o campo de tensão, pois é ainda visível o desequilíbrio entre elementos.
No entanto estes resultados servem para ilustrar outra conclusão tirada na análise de estruturas
reticuladas pelo Método dos Elementos Finitos:
• Para o mesmo número de graus de liberdade, a qualidade da solução cresce com o grau da
aproximação do campo de deslocamentos.
9. Discretização e Aproximação
Na aplicação do Método dos Elementos Finitos à solução de problemas de Elasticidade Plana o
domínio é decomposto em elementos com geometria simples de modo a viabilizar e facilitar as
várias fases de aplicação do método resumidas na Secção 7.A utilização de elementos simples, tipicamente elementos com três e quatro lados, assegura a
primeira condição de facilitar a representação, com o rigor desejado, da geometria e das
condições de fronteira do domínio em análise. Na Figura 22 ilustra-se a discretização de um
açude usando elementos triangulares de 3 nós. A modelação da galeria no centro do açude pode
ser melhorada diminuindo a dimensão dos elementos e/ou aumentando o número de nós do
elemento, como adiante se mostra.
Figura 22: Discretização de um açude com elementos triangulares de 3 nós
Uma segunda condição importante é ser fácil definir expressões gerais para as funções usadas
na aproximação (35) do campo de deslocamentos. A terceira condição, essencial à formulação
em termos de deslocamentos do Método dos Elementos Finitos, que aqui se adopta, é assegurar
que essas funções produzam soluções cinematicamente admissíveis.
A última condição, muito importante em termos de implementação numérica, é a de facilitar o
cálculo dos integrais que definem a matriz de rigidez (40) de cada elemento e os vectores das
forças nodais equivalentes às forças de massa (41) e de fronteira (43).
2
1
2m
11
0,5
1 1 1 1
0,3
0,4
0,2
1
bd
ad d d
y
x
2
cd
8/17/2019 AE2_Elasticidade2D_v4.pdf
30/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
30
Como adiante se mostra, a maneira mais eficaz de satisfazer esses objectivos é recorrer ao
conceito de elemento isoparamétrico. No entanto, nesta fase da apresentação é suficiente analisar
como se pode aproximar uma função sobre os dois tipos de elementos acima referidos, usando a
mais simples aproximação que cada um deles permite, escrita na forma,
1
( , ) ( , ) N
i i
i
f x y x y f Ψ =
∑= (56)
designadamente o elemento triangular de 3 nós ( 3) N = e o elemento rectangular de 4 nós
( 4) N = representados nas Figura 23 e 24.
Figura 23: Elemento triangular de 3 nós Figura 24: Elemento rectangular de 4 nós
Mantém-se o princípio de basear a aproximação em funções polinomiais, definindo-as demodo a terem valor unitário num nó e nulo nos restantes,
1( , )
0i j jse j i
x yse j i
Ψ =
≠
= (57)
para assegurar que os coeficientes da aproximação, i f , representam o valor da função nos nós do
elemento. Para além disso, é necessário assegurar que a aproximação (56) permite representar a
função polinomial mais simples, a função unitária:
1
( , ) 1 N
i
i
x yΨ =
=∑ (58)
9.1 Aproximação Linear
Em consequência das condições acima impostas, as funções presentes na aproximação (56) para
o elemento de 3 nós definem os planos representados na Tabela 1, com a seguinte expressão
geral,
1
( , ) ( ) 1, 2, 32i i i i x y x y com i AΨ α β γ = + + =
em que A representa a área do elemento triangular, dada por,
x
y
1 1( , ) x y
2 2( , ) x y
3 3( , ) x y
x
y1 1( , ) x y 2 2( , ) x y
3 3( , ) x y4 4( , ) x y
a
b
8/17/2019 AE2_Elasticidade2D_v4.pdf
31/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
31
1 2 32 A α α α = + +
se a numeração dos nós for sequencial e no sentido inverso ao dos ponteiros do relógio, tendo os
termos constantes as seguintes expressões,
i j k k j x y x yα = −
i j k y y β = −
i k j x xγ = −
em que i j k ≠ ≠ e onde se permutam os índices pela sequência natural:
1 2 3 3 2 2 3 1 1 3 3 1 2 2 1; ; x y x y x y x y x y x yα α α = − = − = −
1 1 1 1
1 1
1 1
( ) /2
/2
/2
x
y
x y A
A
A
Ψ α β γ
Ψ β
Ψ γ
= + +
∂ =
∂ =
2 2 2 2
2 2
2 2
( ) /2
/2
/2
x
y
x y A
A
A
Ψ α β γ
Ψ β
Ψ γ
= + +
∂ =
∂ =
3 3 3 3
3 3
3 3
( ) /2
/2
/2
x
y
x y A
A
A
Ψ α β γ
Ψ β
Ψ γ
= + +
∂ =
∂ =
Tabela 1: Elemento triangular de 3 nós
Estes resultados mostram que a aproximação (56) para 3 N = é linear e completa, isto é,
envolve todos os termos lineares, x e y , e todos os monómios de grau inferior, que agora se
reduz ao termo constante.
Exercício 9: Recupere a aproximação (50) do campo de deslocamentos na consola triangular
representada na Figura 12 usando as funções de aproximação definidas na Tabela 1.
9.2 Aproximação Bilinear
Quando o mesmo processo de construção das funções de aproximação é aplicado ao domínio
rectangular representado na Figura 24, trabalhando apenas com os nós colocados nos vértices,
obtêm-se as funções definidas e representadas na Tabela 2, em que se usa a notação 1' x x x= −
1' y y y= − , para simplificar a definição das funções de aproximação.
1 1( , ) x y
2 2( , ) x y
3 3( , ) x y
1
1 1( , ) x y
2 2( , ) x y
3 3( , ) x y
1
1 1( , ) x y
2 2( , ) x y
1
3 3( , ) x y
8/17/2019 AE2_Elasticidade2D_v4.pdf
32/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
32
A análise dessas funções mostra que a aproximação (56) para 4 N = é quadrática mas
incompleta, isto é, envolve apenas o termo bilinear, x y (ou ' ' x y na notação usada), dos três
monómios quadráticos possíveis, designadamente 2 x , x y e 2 y .
1
1
1
(1 ' / ) (1 ' / )
(1 ' / ) /
(1 ' / ) / x
y
x a y b
y b a
x a b
Ψ
Ψ
Ψ
= − −
∂ = − −
∂ = − −
2
2
2
(1 ' / ) ' /
(1 ' / ) /
' / x
y
y b x a
y b a
x ab
Ψ
Ψ
Ψ
= −
∂ = −
∂ = −
3
3
3
' ' /
' /
' / x
y
x y ab
y ab
x ab
Ψ
Ψ
Ψ
=
∂ =
∂ =
4
4
4
(1 ' / ) ' /
' /
(1 ' / ) / x
y
x a y b
y ab
x a b
Ψ
Ψ
Ψ
= −
∂ = −
∂ = −
Tabela 2: Elemento rectangular de 4 nós1 1
( ' ; ' ) x x x y y y= − = −
9.3 Grau da Aproximação no Domínio e na Fronteira
A aproximação (56) é adiante generalizada para obter uma maior precisão na representação da
função, tanto para elementos triangulares como para elementos quadrangulares.
Esse enriquecimento é obtido aumentando o número de termos da aproximação, N , ou seja, o
número de nós do elemento de acordo com a condição (57), garantindo que se incluem na
aproximação tantos termos quantos possíveis de grau inferior ao termo de maior grau, M , na
aproximação (56).
1 1( , ) x y
2 2( , ) x y
3 3( , ) x y
4 4( , ) x y
1
1 1( , ) x y
2 2( , ) x y
3 3( , ) x y
4 4( , ) x y
1
1 1( , ) x y
2 2( , ) x y
3 3( , ) x y
4 4( , ) x y
1
1 1( , ) x y
2 2( , ) x y
3 3( , x y
4 4( , ) x y
1
8/17/2019 AE2_Elasticidade2D_v4.pdf
33/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
33
O problema que se põe ao escolher um elemento com N nós para realizar uma dada análise é
saber qual é o grau, M , que se está a usar na aproximação no domínio do elemento, e o grau da
aproximação na fronteira, f M .
A maneira mais expedita para obter esta informação é recorrer ao Triângulo de Pascal
representado na Figura 25, o qual é construído de maneira a agrupar em cada linha todos os
monómios possíveis de um dado grau. Os lados do triângulo com origem no termo constante
definem o grau da aproximação (56) nos lados do elemento. Os termos interiores identificam o
grau dos monómios da aproximação (56) presentes no domínio do elemento.
2 2
3 2 2 3
4 3 2 2 3 4
1
x y
x x y y
x x y x y y
x x y x y xy y
Constante
Linear
Quadrático
Cúbico
Quártico
Figura 25: Triângulo de Pascal
Se se admitir que a aproximação na fronteira do elemento é completa, o que se verifica tanto
para elementos triangulares como quadrangulares, conclui-se que o grau de aproximação num
lado com f N nós é 1 f f M N = −
. É o que se verifica para o elemento triangular de 3 nós e parao elemento rectangular de 4 nós anteriormente definidos: a aproximação é linear nos lados de
ambos os elementos ( 2 f N = , 1 f M = ), como se ilustra nas Tabelas 1 e 2.
Nas Figuras 26 e 27 definem-se outros tipos de elementos triangulares (de 6 e 10 nós) e
quadrangulares (de 8 e 9 nós). A todos eles se aplica a definição anteriormente dada para o grau
da aproximação (56) nos lados dos elementos: quadrática nos lados com 3 nós e cúbica nos lados
com 4 nós.
Figura 26: Elementos triangulares com 3, 6 e 10 nós.
1
1
1 2
3
ξ
η
1
1
1
2
3 ξ
η
4
5
6
1
1
1
2 3
ξ
η
4
5
6
7
8
9 10
8/17/2019 AE2_Elasticidade2D_v4.pdf
34/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
34
Figura 27: Elementos quadrangulares com 4, 8 e 9 nós.
Na literatura sobre o Método dos Elementos Finitos designam-se por serendipianos os
elementos sem nós interiores e Lagrangianos os elementos que os têm. Essa distinção decorre da
escolha das funções de aproximação, sabendo-se que, para a mesma ordem de aproximação, os
elementos Lagrangianos têm melhor comportamento.
Se se admitir que a aproximação (56) num elemento triangular com N nós é completa, para
determinar o grau no domínio do elemento, M , basta varrer o Triângulo de Pascal por linhas e
contabilizar tantos monómios quanto o número de nós do elemento.
Aplicando este processo, conclui-se que a aproximação no elemento de 3 nós é linear, 1 M = ,
como anteriormente se verificou, sendo quadrática, 2 M = , e cúbica, 3 M = para os elementos
triangulares com 6 e 10 nós representados na Figura 25.
O processo para determinar o grau da aproximação (56) num elemento quadrangular com N
nós é semelhante mas dificultado pelo facto da aproximação ser incompleta, isto é, não envolver
todos os monómios de grau M , ou mesmo 1 M − , sendo M o maior grau envolvido na
aproximação.
Já se verificou que o rectângulo de 4 nós é completo nos termos lineares mas só contém o
termo bilinear dos monómios quadráticos do Triângulo de Pascal. O elemento de 8 nós
representado na Figura 26 contém todos os termos quadráticos, mas apenas dois dos monómios
cúbicos, os termos 2 x y e 2 x y . Para manter a simetria da aproximação, isto é, para não dar maior
peso aos monómios em x ou em y , o nó adicional no elemento de 9 nós é usado para introduzir
o termo 2 2 x y , sendo portanto a aproximação incompleta nos termos cúbicos e quárticos.
Estes elementos e estes critérios de definição das funções de aproximação serão adiante
utilizados para definir os elementos isoparamétricos usados na solução de problemas de
Elasticidade Plana.
1 2
3
ξ
η
4
1 1
1
1
1
2
3
ξ
η
4
5
6
7
8
1 1
1
1
1
2
3
ξ
η
4
5
6
7
8 9
1 1
1
1
8/17/2019 AE2_Elasticidade2D_v4.pdf
35/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
35
10. Generalização da Aproximação
As funções de aproximação anteriormente definidas podem ser utilizadas para interpolar uma
qualquer função definida num domínio plano. Por exemplo, para representar a topografia de uma
região, pode-se triangularizar o terreno, definir as cotas nos nós da malha de discretização e
aproximar o relevo usando a aproximação (56) em cada um dos elementos, com 3 N = ,
representando i f a cota do ponto do terreno que coincide com esse nó.
A mesma ideia é aplicada à aproximação do campo de deslocamentos num elemento finito
plano, em que os coeficientes i f da aproximação (56) passam a representar as componentes do
deslocamento nos nós de cada elemento em que a estrutura foi discretizada. Tomando como base
essa aproximação do campo de deslocamentos, pode-se determinar as aproximações
correspondentes para os campos de deformação e de tensão. É esta primeira fase da descrição
sumária do Método dos Elementos Finitos apresentada na Secção 7 que a seguir se analisa:
• A discretização da estrutura em elementos finitos;
• A aproximação do campo de deslocamentos em cada elemento na forma (35);
• A determinação dos campos de deformação (36) e de tensão (38) correspondentes;
• A verificação das condições de continuidade desses campos quando os elementos são
reunidos para constituir a estrutura.
Figura 28: Dados e discretização para o exemplo da placa trapezoidal
10.1 Aproximação do Campo de Deslocamento
Independentemente da geometria do elemento, as componentes (de translação) do campo de
deslocamento são sempre medidas no referencial global da malha em que o elemento se insere.
Para além disso, a aproximação (56) é aplicada independentemente a cada componente do
deslocamento, sendo também os deslocamentos nodais medidos no referencial global, de acordo
com a sequência de numeração dos nós, como se mostra na Figura 29:
1 1
2m
x
y
10
20 kPa
3
0,3
x
y
f 0
f 20 kNm
E 200 GPa
ν
−
=
= −
=
=
8/17/2019 AE2_Elasticidade2D_v4.pdf
36/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
36
1
1
( , ) ( , )
( , ) ( , )
N
x i ix
i
N
y i iy
i
u x y x y d
u x y x y d
Ψ
Ψ
=
=
=
=
∑
∑ (59)
De acordo com esta aproximação, quando se provoca um deslocamento no nó j segundo a
direcção x, jxd , e se impedem todos os outros deslocamentos nodais, 0 jyd = e 0ix iyd d = = para
i j≠ , o elemento deforma-se apenas com deslocamentos segundo x,
( , ) ( , ) ; ( , ) 0 x j jx yu x y x y d u x yΨ = = (60)
obtendo-se um resultado análogo, mas segundo y, quando se impõe um deslocamento nodal
nessa direcção:
( , ) 0; ( , ) ( , ) x y j jyu x y u x y x y d Ψ = =
a) Elemento triangular de 3 nós b) Elemento rectangular de 4 nós
Figura 29: Convenção para a medição das componentes do campo de deslocamento
A expressão matricial da aproximação (59) é escrita na forma que for mais adequada para a
questão que se estiver a tratar. Pode ser conveniente definir separadamente cada componente,
uα α =Ψ ΨΨ Ψ d (61)
com xα = ou yα = , reunindo o vector-linha Ψ ΨΨ Ψ as funções de aproximação,
{ }1 2 N Ψ Ψ Ψ =Ψ ΨΨ Ψ ⋯ (62)
e o vector-coluna α d as componentes do deslocamentos nodais:
1
2
N
d
d
d
α
α
α
α
=
d ⋮
x
y 1
2
3
xu
yu
2 xd
3 xd
1 xd
1 yd
2 yd
3 yd
x
y1 2
3
xu
yu
2 xd
3 xd
1 xd
1 yd 2 yd
3 yd
4
4 yd
4 xd
8/17/2019 AE2_Elasticidade2D_v4.pdf
37/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
37
Alternativamente, pode ser conveniente escrever matricialmente a definição (61)
simultaneamente para ambas as componentes,
x x
y y
u
u
=
Ψ ΨΨ Ψ
Ψ ΨΨ Ψ
d 0
d 0 (63)
em que 0 é o vector-linha com N coeficientes nulos, ou recorrer à forma mais compacta (35) da
aproximação (59), em que:
x
y
u
u
=
u
=
Ψ ΨΨ Ψ Ψ ΨΨ Ψ
Ψ ΨΨ Ψ
0
0
x
y
=
d d
d
Figura 30: Deslocamentos e forças nodais na placa trapezoidal
Identificam-se na Figura 30 os deslocamentos nodais da placa trapezoidal (assim como as
forças correspondentes, para uso posterior). Como adiante se irá verificar, esta discretização é
inaceitável em termos práticos, pois produz uma aproximação muito fraca da solução para o
carregamento e para as condições de apoio definidas na Figura 28. Para além disso, não é boa
prática usar elementos com graus de aproximação diferentes na análise de uma estrutura.
As expressões que se obtêm para o vector (62) que reúne as funções de aproximação das
componentes do deslocamento são as seguintes para cada elemento, de acordo com as definições
dadas nas Tabelas 1 e 2:
{ }
{ }
(1) (1) (1) (1)1 2 3
1 12 21 x x y y
Ψ Ψ Ψ =
− −
Ψ ΨΨ Ψ (64)
1
3 3 xd
2 xd 1 xd
1 yd 2 yd
3 yd
4
4 yd
4 xd
1 1
3 xd
3 yd
2 xd 1 xd
1 yd 2 yd
1
3
22
2
1
34
1
3
22
1 xF
1 xF 2 xF
2 xF
3 xF 3 xF 4 xF
4 yF 3 yF
3 yF
2 yF 2 yF 1 yF 1 yF
8/17/2019 AE2_Elasticidade2D_v4.pdf
38/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
38
{ }
{ }
(2) (2) (2) (2) (2)1 2 3 4
1 1 1 12 2 2 2(2 )(2 ) (1 )(2 ) (1 ) (2 ) x y x y x y x y
Ψ Ψ Ψ Ψ =
− − − − − − − −
Ψ ΨΨ Ψ (65)
10.2 Continuidade do Campo de Deslocamento
A condição de continuidade dos deslocamentos no domínio dos elementos é implicitamente
assegurada pelas funções de aproximação. Para além disso, e de acordo com a análise feita na
Secção 9, essas funções variam linearmente nas fronteiras dos elementos do exemplo em análise,
pois ambos os elementos considerados têm 2 nós por lado, como se ilustra na Figura 31 para o
deslocamento (1) (2)3 4 x xd d d = = .
a) Deformadas dos elementos b) Deformada da estrutura
Figura 31: Deformadas devidas ao deslocamento (1) (2)3 4 x xd d d = =
Por exemplo, no lado definido pelos nós 2 e 3 do elemento 1, o segmento definido por 1 x = e
0 2 y≤ ≤ (ver Figura 28) tem-se, usando a expressão (60) com (1)3 xd d = , e a definição (64):
(1) (1) 13 2
(1)
( 1, ) ( 1, ) ( )( 1)
( 1, ) 0 x
y
u x y x y d y d x
u x y
Ψ Γ
= = = ==
= =
Se se repetir o processo para o lado definido pelos nós 1 e 4 do elemento 2, usando agora a
expressão (60) com (2 )4 xd d = e a definição (65) para as funções do elemento, obtém-se o mesmo
resultado final:(2) (1) 1
4 2(2 )
( 1, ) ( 1, ) ( )( 1)
( 1, ) 0 x
y
u x y x y d y d x
u x y
Ψ Γ
= = = ==
= =
Consequentemente, os dois elementos têm deslocamentos compatíveis ao longo do lado que
partilham, mostrando-se na Figura 31b) a deformada cinematicamente admissível que se obtém
para a placa trapezoidal quando se reúnem os elementos.
É importante notar que se simplifica nessa figura a representação das condições de apoio
recorrendo a apoios rígidos pontuais. Como, para a aproximação feita, os deslocamentos variam
1
34
1
3
22
d d d
8/17/2019 AE2_Elasticidade2D_v4.pdf
39/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
39
linearmente ao longo dos lados, as condições de encastramento deslizante são exactamente
reproduzidas colocando apoios móveis nos nós afectados por essa condição de apoio. O nó fixo
modela a combinação do efeito das duas condições de encastramento deslizante.
10.3 Aproximação do Campo de Deformação
Para garantir que a aproximação é cinematicamente admissível no sentido forte, a deformação
causada pela aproximação (59) é determinada impondo a condição de compatibilidade no
domínio (14), ficando:
1
1
1 1
N i
xx ix
i
N i
yy iyi
N N i i
xy ix iy
i i
d x
d y
d d y x
Ψ ε
Ψ ε
Ψ Ψ γ
=
=
= =
∂=
∂
∂=
∂
∂ ∂= +
∂ ∂
∑
∑∑ ∑
(66)
De acordo com esta aproximação, quando se provoca um deslocamento no nó j do elemento
segundo a direcção x, jxd , e se impedem todos os outros deslocamentos nodais, 0 jyd = e
0ix iyd d = = para i j≠ , o elemento não tem deformação axial segundo y,
; 0;
j j
xx jx yy xy jxd d x y
Ψ Ψ
ε ε γ
∂ ∂= = =
∂ ∂
obtendo-se um resultado análogo, mas segundo y, quando se impõe um deslocamento nodal
nessa direcção:
0; ; j j xx yy jy xy jyd d
y x
Ψ Ψ ε ε γ
∂ ∂= = =
∂ ∂
Na notação matricial (36), é a seguinte a forma explícita da matriz (37) que define as
deformações compatíveis com a aproximação (59) dos deslocamentos:
1 2
1 2
1 2 1 2
0 0 0
0 0 0 x x x N
y y y N
y y y N x x x N
Ψ Ψ Ψ
Ψ Ψ Ψ
Ψ Ψ Ψ Ψ Ψ Ψ
∂ ∂ ∂
= ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
B
⋯ ⋯
⋯ ⋯
⋯ ⋯
(67)
A partição feita nesta definição distingue as deformações devidas aos deslocamentos nodais
segundo x e segundo y, x d e y d , respectivamente, por ser por vezes conveniente escrever a
equação (36) na forma,
x
x y x x y y
y
= = +
d
e B B B d B d d (68)
8/17/2019 AE2_Elasticidade2D_v4.pdf
40/100
Análise de Estruturas II: Elasticidade Plana e Tridimensional
40
em que, de acordo com a definições (2) e (67):
1 2
1 2
0 0 0 x x x N
x
y y y N
Ψ Ψ Ψ
Ψ Ψ Ψ
∂ ∂ ∂
=
∂ ∂ ∂
B
⋯
⋯
⋯
1 2
1 2
0 0 0
y y y y N
x x x N
Ψ Ψ Ψ
Ψ Ψ Ψ
= ∂ ∂ ∂ ∂ ∂ ∂
B
⋯
⋯
⋯
As definições que se obtêm para os elementos da placa trapezoidal são as seguintes,
(1)
2 2 0 0 0 01
0 0 0 0 1 1
2 0 1 1 2 2 0
−
= − − −
B (69)
(2 )