Análise de Sistemas de Potência III (1).pdf
153
-
Upload
saulo-araujo-queiroz -
Category
Documents
-
view
122 -
download
33
Transcript of Análise de Sistemas de Potência III (1).pdf


Sumário
CAPÍTULO 1 - MÉTODOS DE OTIMIZAÇÃO APLICADOS A SISTEMAS DE
POTÊNCIA ................................................................................................................. 6
1. INTRODUÇÃO ................................................................................................... 6
2. PROBLEMAS DE OTIMIZAÇÃO COM RESTRIÇÕES ....................................... 6
3. DESPACHO ECONÔMICO DE UNIDADES TÉRMICAS.................................... 9
3.1 Despacho Desprezando as Perdas na Transmissão ................................... 9
3.2 Algoritmo de Solução ................................................................................ 12
3.3 Despacho Considerando as Perdas na Transmissão ................................ 15
4. PROGRAMAÇÃO DA GERAÇÃO TÉRMICA ................................................... 17
4.1 Reserva Girante ........................................................................................ 19
4.2 Restrições Operacionais ........................................................................... 20
4.3 Métodos de Solução ................................................................................. 21
5. COORDENAÇÃO HIDROTÉRMICA ................................................................ 32
5.1 Programação da Operação Hidrotérmica de Médio Prazo ........................ 33
5.2 Estratégia Baseada na Curva Limite ......................................................... 34
5.3 Estratégia Baseada no Valor Marginal da Água ........................................ 34
5.4 Planejamento da Operação Hidrotérmica de Curto Prazo ......................... 35
6. FLUXO DE POTÊNCIA ÓTIMO........................................................................ 53
6.1 Formulação do Problema .......................................................................... 54
6.2 Fluxo de Potência Ótimo Linearizado ........................................................ 58
7. REFERÊNCIAS ................................................................................................ 69
8. ANEXO ............................................................................................................ 70
CAPÍTULO 2 - REPRESENTAÇÃO DE CONTROLES E LIMITES NOS
PROGRAMAS DE FLUXO DE POTÊNCIA ......................................................... 74
1. INTRODUÇÃO ................................................................................................. 74
2. MODOS DE REPRESENTAÇÃO ..................................................................... 75
2.1 Ajustes Alternados .................................................................................... 75

2.2 Representação do Limite de Injeção de Reativo nas Barras PV ................ 76
2.3 Limites de Tensão em Barras PQ.............................................................. 78
2.4 Transformadores com Ajuste Automático de Tap ...................................... 80
2.5 Transformadores Defasadores com Controle Automático de Fase............ 82
2.6 Controle de Intercâmbio entre Áreas ......................................................... 83
2.7 Controle de Tensão em Barras Remotas .................................................. 85
3. REFERÊNCIAS ................................................................................................ 86
CAPÍTULO 3 - ESTIMAÇÃO DE ESTADOS EM SISTEMAS ELÉTRICOS DE
POTÊNCIA ............................................................................................................... 87
1. INTRODUÇÃO ................................................................................................. 87
1.1 Estados Operativos da Rede ..................................................................... 88
2. MODERNOS CENTROS DE OPERÇÃO DE SISTEMAS ................................ 89
2.1 Centro de Operação de Sistemas - COS................................................... 89
2.2 Principais Funções Executadas no COS ................................................... 90
2.3 Centro de Operação de Distribuição - COD .............................................. 91
3. PRINCIPAIS CARACTERÍSTICAS DOS ESTIMADORES DE ESTADOS EM
SEP ......................................................................................................................... 94
4. APLICAÇÃO DOS RESULTADOS DA ESTIMAÇÃO DE ESTADOS EM SEP . 95
5. CLASSIFICAÇÃO DOS ESTIMADORES DE ESTADOS ................................. 95
6. MÍNIMOS QUADRADOS PONDERADOS (MQP) – ABORDAGEM CLÁSSICA
96
7. ESTIMADOR DE ESTADOS LINEARIZADO (DC) ......................................... 100
7.1 Considerações Iniciais ............................................................................ 100
7.2 Hipóteses Simplificadoras ....................................................................... 100
7.3 Estrutura de Dados do Estimador DC ..................................................... 101
7.4 Modelo de Medição Linearizado .............................................................. 103
7.5 Solução do Estimador de Estados DC .................................................... 103
8. ESTIMADOR DE ESTADOS NÃO-LINEAR ................................................... 106
8.1 Modelo Não-Linear de Medição .............................................................. 106

8.2 Solução do Método MQP Aplicado ao Problema de Estimação de Estados
em SEP ............................................................................................................. 107
8.3 O método de Gauss-Newton ................................................................... 107
8.4 Estrutura de Dados do Estimador CA ...................................................... 109
9. ESTIMADORES DE ESTADOS DESACOPLADOS ....................................... 121
9.1 Estimadores Desacoplados no Algoritmo ................................................ 123
9.2 Estimadores Desacoplados no Modelo ................................................... 123
10. REFERÊNCIAS BIBLIOGRÁFICAS ............................................................ 125
CAPÍTULO 4 - ANÁLISE DE CONTINGÊNCIAS EM SISTEMAS
ELÉTRICOS DE POTÊNCIA ............................................................................... 126
1. INTRODUÇÃO ............................................................................................... 126
2. ANÁLISE DE ALTERAÇÕES EM REDES ELÉTRICAS – MÉTODOS DE
COMPENSAÇÃO .................................................................................................. 128
2.1 Pré-Compensação .................................................................................. 130
2.2 Pós-Compensação .................................................................................. 131
2.3 Compensação Intermediária ................................................................... 131
CAPÍTULO 5 - ANÁLISE DE SENSIBILIDADE ............................................... 135
1. INTRODUÇÃO ............................................................................................... 135
2. MODELO MATEMÁTICO PARA ANÁLISE DE SENSIBILIDADE ................... 135
2.1 Matrizes de Sensibilidade ....................................................................... 137
2.2 Solução da Equação Matricial de Sensibilidade ...................................... 138
3. DETERMINAÇÃO DAS GRANDEZAS FUNCIONAIS .................................... 140
CAPÍTULO 6 – PREVISÃO DE CARGA EM SISTEMAS ELÉTRICOS DE
POTÊNCIA ............................................................................................................. 145
1. INTRODUÇÃO ............................................................................................... 145
2. CARACTERÍSTICAS DAS CARGAS EM SISTEMAS DE ELÉTRICOS DE
POTÊNCIA ............................................................................................................ 146
2.1 Fatores Temporais .................................................................................. 146
2.2 Fatores Meteorológicos ........................................................................... 147
2.3 Fatores Aleatórios ................................................................................... 147
2.4 Fatores Determinísticos .......................................................................... 147
3. MODELOS DE CARGA .................................................................................. 148
3.1 Modelo de Pico de Carga ........................................................................ 148
3.2 Modelo de Curva de Carga ..................................................................... 148
4. TÉCNICAS DE PREVISÃO DE CARGA ......................................................... 149
4.1 Métodos Convencionais .......................................................................... 150
4.2 Métodos Não Convencionais ................................................................... 152
5. REFERÊNCIAS .............................................................................................. 153
CAPÍTULO 1 - MÉTODOS DE
OTIMIZAÇÃO APLICADOS A
SISTEMAS DE POTÊNCIA
1. INTRODUÇÃO
Este capítulo aborda a aplicação de métodos de otimização na resolução de
problemas típicos da área de sistemas de potência, tais como: despacho econômico
de unidades de geração térmica; programação da geração térmica; coordenação
hidrotérmica e fluxo de potência ótimo.
Primeiramente, é feita uma breve revisão sobre o método de Lagrange aplicado à
solução de problemas de otimização com restrições. Em seguida, esses conceitos são
estendidos aos problemas de despacho econômico da geração térmica e coordenação
hidrotérmica.
Por fim, faz-se uma breve apresentação do problema de fluxo de potência ótimo (FPO)
em linhas gerais, para em seguida apresentar a formulação do problema de
FPO,utilizando o modelo linearizado (DC) para representação das equações de fluxo
de potência nas redes de transmissão.
2. PROBLEMAS DE OTIMIZAÇÃO COM RESTRIÇÕES
Em diversos problemas relacionados aos sistemas de potência, comumente, são
encontradas funções que devem ser otimizadas (i.e., encontrar os pontos de máximo
ou mínimo). Uma vez que o objetivo é maximizar ou minimizar uma determinada
função matemática, essa função é usualmente denominada de função objetivo. As
funções de restrição ou simplesmente os limites das variáveis do problema são
agrupadas como restrições do problema. A região definida pelas restrições é chamada
de região factível do problema. Se as restrições são tais que não há uma região
factível, isto é, não há valores para as variáveis independentes que satisfaçam
simultaneamente todas as equações de restrição, o problema de otimização não tem
solução factível.
Antes de dar início à formulação de problemas de otimização em sistemas de
potência, considere o problema de otimização apresentado em (1.1).
( )
( )
(1.1)
O problema de otimização mostrado em (1.1) pode ser graficamente representado
conforme ilustra a Figura 1.1.
7
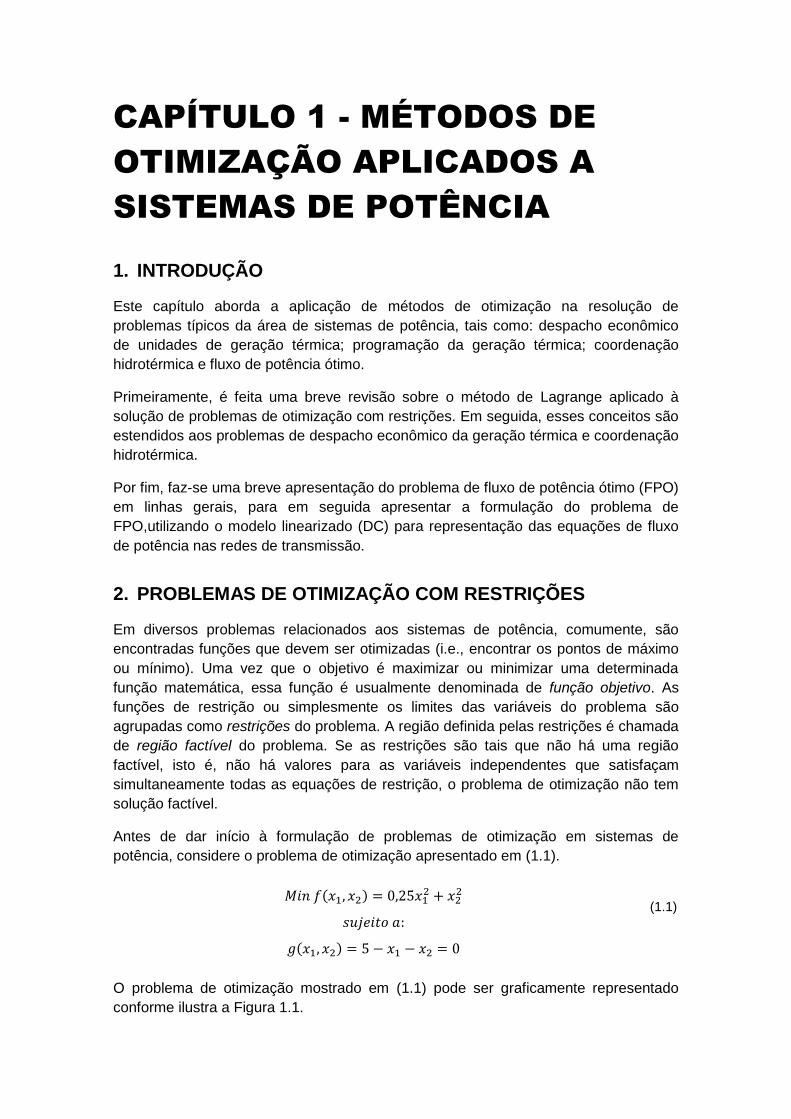
Figura 1.1: Representação gráfica da função objetivo e da equação de restrição.
Pode-se observar pela Figura 1.1 que o ótimo do problema de otimização está na
interseção da função elíptica para e a equação de restrição ( ). Nota-se
também que o ponto de ótimo ocorre onde a função de restrição é tangente à função
.
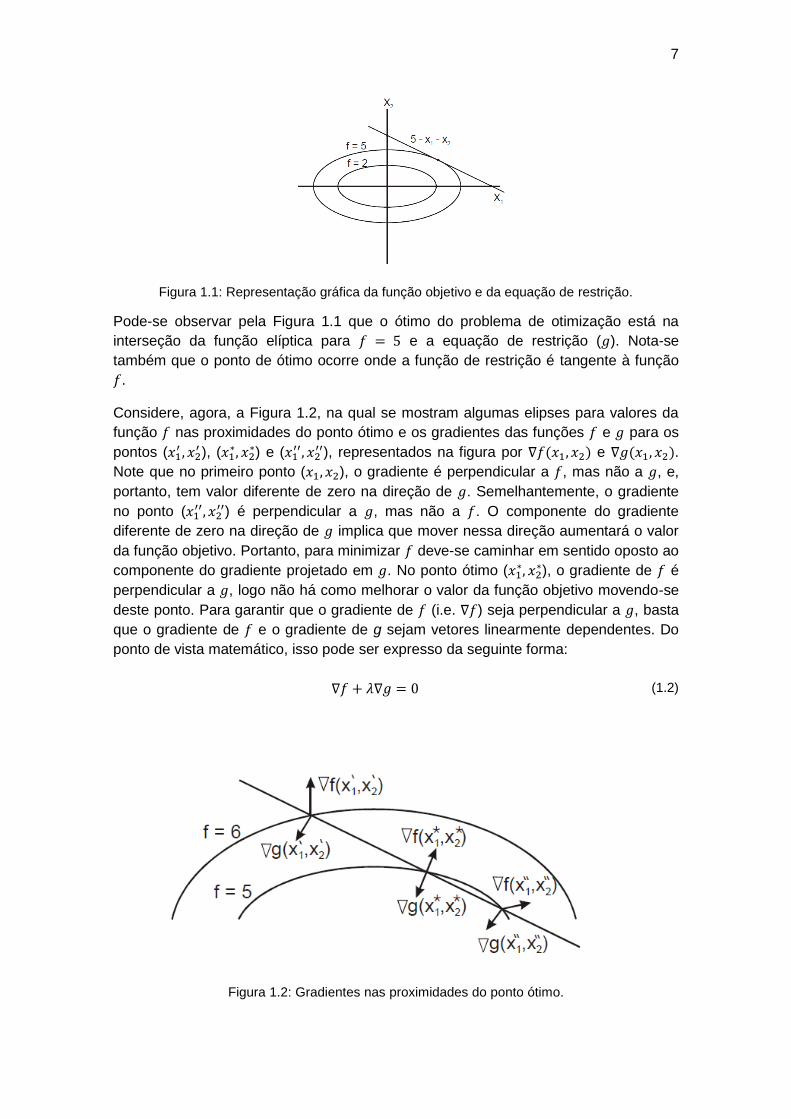
Considere, agora, a Figura 1.2, na qual se mostram algumas elipses para valores da
função nas proximidades do ponto ótimo e os gradientes das funções e para os
pontos (
), (
) e (
), representados na figura por ( ) e ( ).
Note que no primeiro ponto ( ), o gradiente é perpendicular a , mas não a , e,
portanto, tem valor diferente de zero na direção de . Semelhantemente, o gradiente
no ponto (
) é perpendicular a , mas não a . O componente do gradiente
diferente de zero na direção de implica que mover nessa direção aumentará o valor
da função objetivo. Portanto, para minimizar deve-se caminhar em sentido oposto ao
componente do gradiente projetado em . No ponto ótimo (
), o gradiente de é
perpendicular a , logo não há como melhorar o valor da função objetivo movendo-se
deste ponto. Para garantir que o gradiente de (i.e. ) seja perpendicular a , basta
que o gradiente de e o gradiente de g sejam vetores linearmente dependentes. Do
ponto de vista matemático, isso pode ser expresso da seguinte forma:
(1.2)
Figura 1.2: Gradientes nas proximidades do ponto ótimo.

8
O escalar é conhecido como multiplicador de Lagrange. O problema de otimização
mostrado em (1.1) pode, então, ser reformulado utilizando o multiplicador de
Lagrange.
( ) ( ) ( ) (1.3)
A expressão (1.3) é chamada de equação de Lagrange. Ao encontrar o ótimo da
equação ( ), isto é, os pontos extremos ( ), encontra-se automaticamente
o valor correto de . Para que a condição imposta pela equação (1.2) seja satisfeita,
basta que as derivadas parciais da função de Lagrange sejam igualadas a zero.
(1.4)
Para ilustrar como o processo descrito anteriormente funciona, considere novamente o
problema dado pela equação (1.1). Utilizando a função de Lagrange, o problema pode
ser reescrito da seguinte forma:
( )
( )
Tomando as derivadas parciais da função de Lagrange e igualando-as a zero, tem-se:
Note que a derivada da função de Lagrange em relação à equivale à equação de
restrição. Finalmente, resolvendo o sistema de equações anteriormente mostrado,
chega-se a:

9
3. DESPACHO ECONÔMICO DE UNIDADES TÉRMICAS
3.1 Despacho Desprezando as Perdas na Transmissão
Considere um sistema composto por unidades térmicas conectadas a uma barra
que alimenta uma carga , conforme ilustra a Figura 1.3.
Figura 1.3: N unidades térmicas suprindo uma carga.
Matematicamente, o problema pode ser formulado como se segue:
∑ ( )
(1.5)
∑
(1.6)
Na equação (1.5) o termo ( ) representa a função custo de produção de cada
unidade geradora e tem a seguinte característica:
( ) (1.7)
A distribuição ótima da carga entre os geradores pode ser obtida por meio dos
multiplicadores de Lagrange. Nesse caso, a função objetivo e a função de restrição
podem ser combinadas na seguinte função de Lagrange:
( ) ( ) ( ) (1.8)
As condições necessárias para que o ótimo da função seja encontrado são que as
derivadas parciais da função de Lagrange em relação às variáveis independentes (i.e.
e ) sejam todas iguais a zero.

10
( )
( )
( )
∑
(1.9)
Adicionalmente, os limites máximo e mínimo de geração podem ser adicionados ao
problema. Sendo assim, o problema passa a ser formulado pelo conjunto de equações
e inequações a seguir.
( )
∑
(1.10)
As inequações anteriores podem ser expandidas nas seguintes condições:
( )
(1.11)
Exemplo 3.1:
Determine o despacho ótimo de 3 unidades térmicas utilizadas para suprir uma carga
de 850 MW.
Dados das unidades
Tabela 1.1: Dados do sistema do exemplo 3.1.
Unidade Curva Característica H(P)
[MBtu/h]
Custo de operação
[$/MBtu]
Limites operacionais
[MW]
U1 1,1
U2 1,0
U3 1,0
Solução:
O primeiro passo é obter a função custo de produção para cada unidade. Para tal,
basta que o custo de operação seja multiplicado pela função de consumo ( ). Sendo
assim, tem-se:
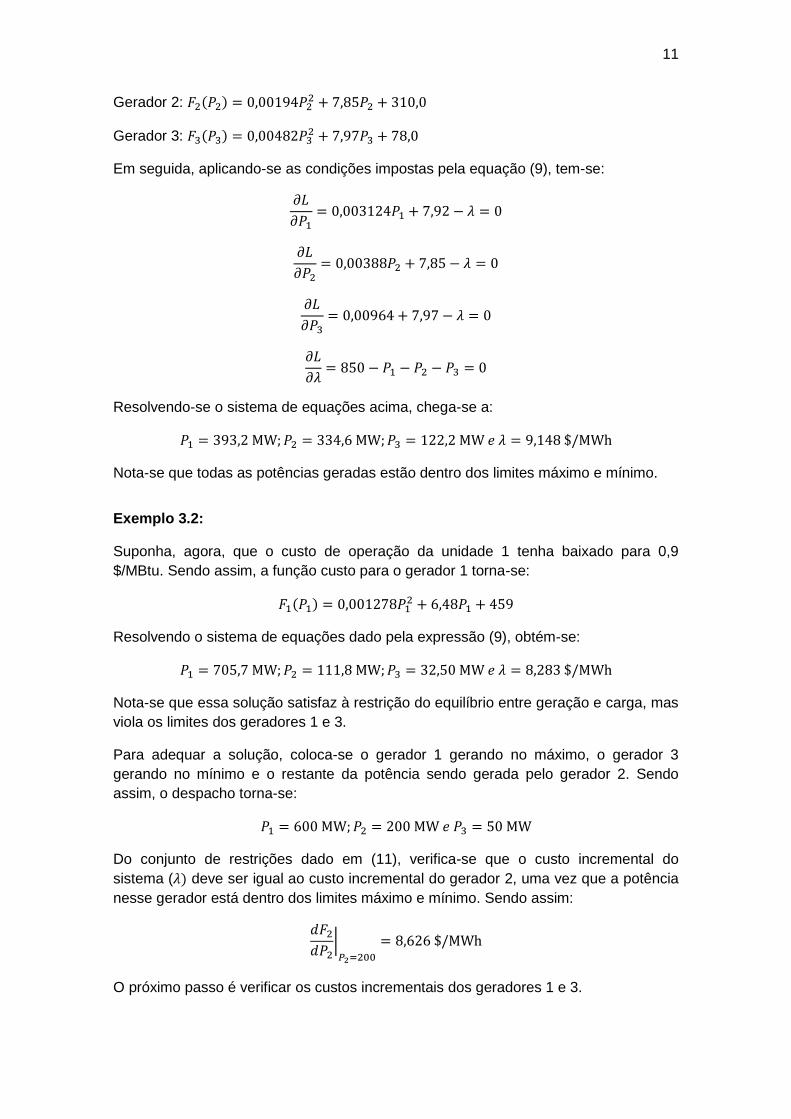
Gerador 1: ( )
11
Gerador 2: ( )
Gerador 3: ( )
Em seguida, aplicando-se as condições impostas pela equação (9), tem-se:
Resolvendo-se o sistema de equações acima, chega-se a:
Nota-se que todas as potências geradas estão dentro dos limites máximo e mínimo.
Exemplo 3.2:
Suponha, agora, que o custo de operação da unidade 1 tenha baixado para 0,9
$/MBtu. Sendo assim, a função custo para o gerador 1 torna-se:
( )
Resolvendo o sistema de equações dado pela expressão (9), obtém-se:
Nota-se que essa solução satisfaz à restrição do equilíbrio entre geração e carga, mas
viola os limites dos geradores 1 e 3.
Para adequar a solução, coloca-se o gerador 1 gerando no máximo, o gerador 3
gerando no mínimo e o restante da potência sendo gerada pelo gerador 2. Sendo
assim, o despacho torna-se:
Do conjunto de restrições dado em (11), verifica-se que o custo incremental do
sistema ( ) deve ser igual ao custo incremental do gerador 2, uma vez que a potência
nesse gerador está dentro dos limites máximo e mínimo. Sendo assim:
|
O próximo passo é verificar os custos incrementais dos geradores 1 e 3.

12
|
|
Nota-se que o custo incremental do gerador 1 ( ) é menor que 8,626
$/MWh, logo a unidade 1 deve realmente gerar no seu limite máximo. Entretanto, o
custo incremental da unidade 3 ( ) é menor que 8,626 $/MWh, o que
implica que a unidade 3 não deve gerar no mínimo. Portanto, as unidades 2 e 3 devem
ser redespachadas. Isso significa ter que resolver o seguinte sistema de equações:
Resolvendo o sistema de equações anterior, obtém-se:
Observe que esse despacho satisfaz às condições dadas em (11), pois:
|
é menor que e
3.2 Algoritmo de Solução
O método de solução mostrado anteriormente, embora seja simples, não é muito
prático para ser desenvolvido computacionalmente. Por esse motivo, nessa subseção,
as equações serão reorganizadas de uma maneira mais fácil, para que elas possam
ser utilizadas em um processo iterativo de busca pela solução ótima.
Como mostrado anteriormente, a função de custo de produção do gerador é dada por
um polinômio de segunda ordem. Na condição de otimalidade, tem-se que:
(1.12)

13
da qual se obtém:
(1.13)
Substituindo a equação (1.13) na equação de equilíbrio entre geração e carga, tem-se:
∑(
)
(1.14)
Após algumas modificações, a equação (1.14) pode ser posta na forma a seguir:
( ) ∑
∑
(1.15)
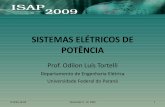
As equações (1.13) e (1.15) podem ser utilizadas alternadamente em um processo
iterativo para resolver o problema de despacho ótimo, conforme ilustrado na Figura
1.4.

14
Início
k = 1
Sim
Pi <
Pi
Min
Sim
Pi > Pi
Max
Não
A
k > N Max Sim
Problema não convergiu
|f(l)| > e Não
Solução encontrada
l = l + lk+1 k
Δ
Pi =
Pi
Min
Pi = Pi
Max
Calcular:
Pi = l - bi
2gi
Calcular:
Último gerador
B
B
N
f(l) = PL
- Pi
i=1
Calcular:
Δlk
= f(l)k
f’(l)k
k=k+1
-
Ler dados:
Número de geradores: N
Limites dos geradores: P e P M ax M in
Coefic ientes da função custo: , e a b g
Carga: PL
Custo inc remental inic ial: l0
Número máximo de iterações: NM ax
Tolerânc ia: e
Figura 1.4: Algoritmo de solução.
O valor do custo incremental ( ) pode ser corrigido utilizando-se o método de Newton,
ou seja, nas proximidades da solução, a função dada por (1.15) pode ser linearizada,
conforme se mostra em (1.16).
( ) ( ) ( ) (1.16)
15
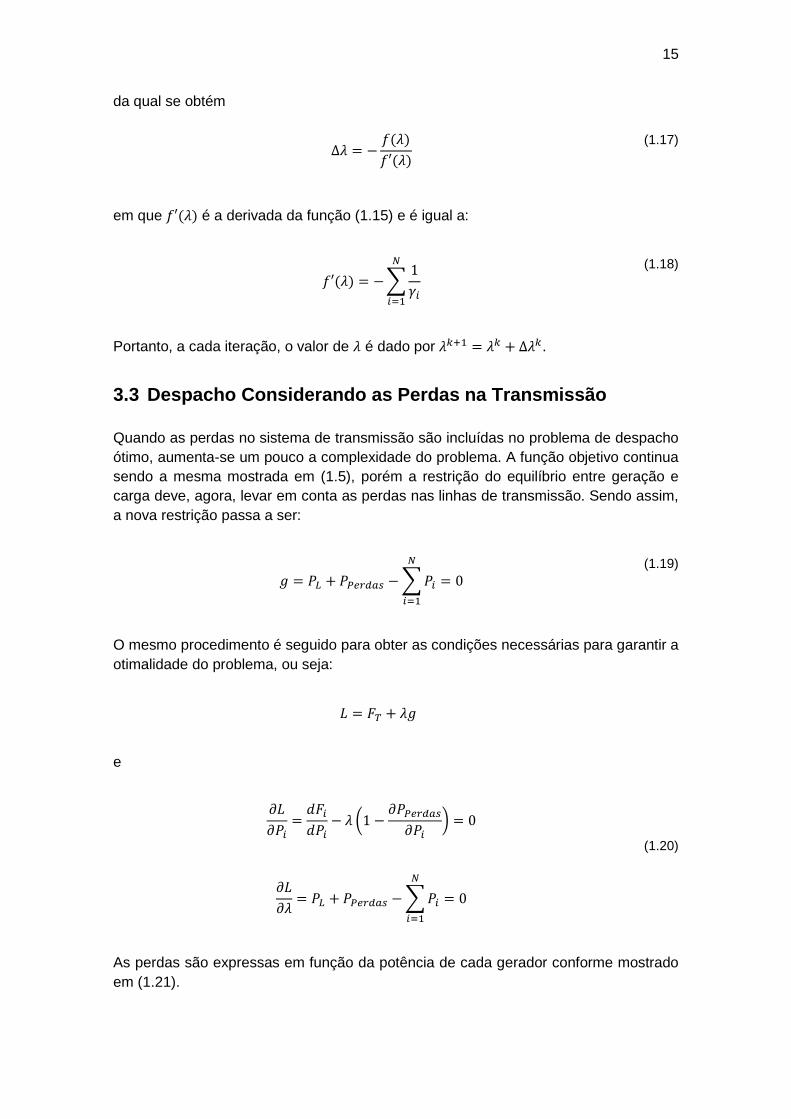
da qual se obtém
( )
( )
(1.17)
em que ( ) é a derivada da função (1.15) e é igual a:
( ) ∑
(1.18)
Portanto, a cada iteração, o valor de é dado por .
3.3 Despacho Considerando as Perdas na Transmissão
Quando as perdas no sistema de transmissão são incluídas no problema de despacho
ótimo, aumenta-se um pouco a complexidade do problema. A função objetivo continua
sendo a mesma mostrada em (1.5), porém a restrição do equilíbrio entre geração e
carga deve, agora, levar em conta as perdas nas linhas de transmissão. Sendo assim,
a nova restrição passa a ser:
∑
(1.19)
O mesmo procedimento é seguido para obter as condições necessárias para garantir a
otimalidade do problema, ou seja:
e
(
)
(1.20)
∑
As perdas são expressas em função da potência de cada gerador conforme mostrado
em (1.21).

16
∑
(1.21)
Uma maneira fácil de resolver esse problema é utilizar o algoritmo anterior,
substituindo a equação (1.13) pela equação (1.22).
( )
(1.22)
Além da substituição da equação (1.13) pela equação (1.22), as perdas devem ser
calculadas utilizando-se os valores mais recentes de e incluí-las na equação de
equilíbrio entre geração e carga, conforme a segunda equação da expressão (1.20).
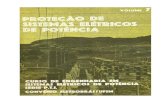
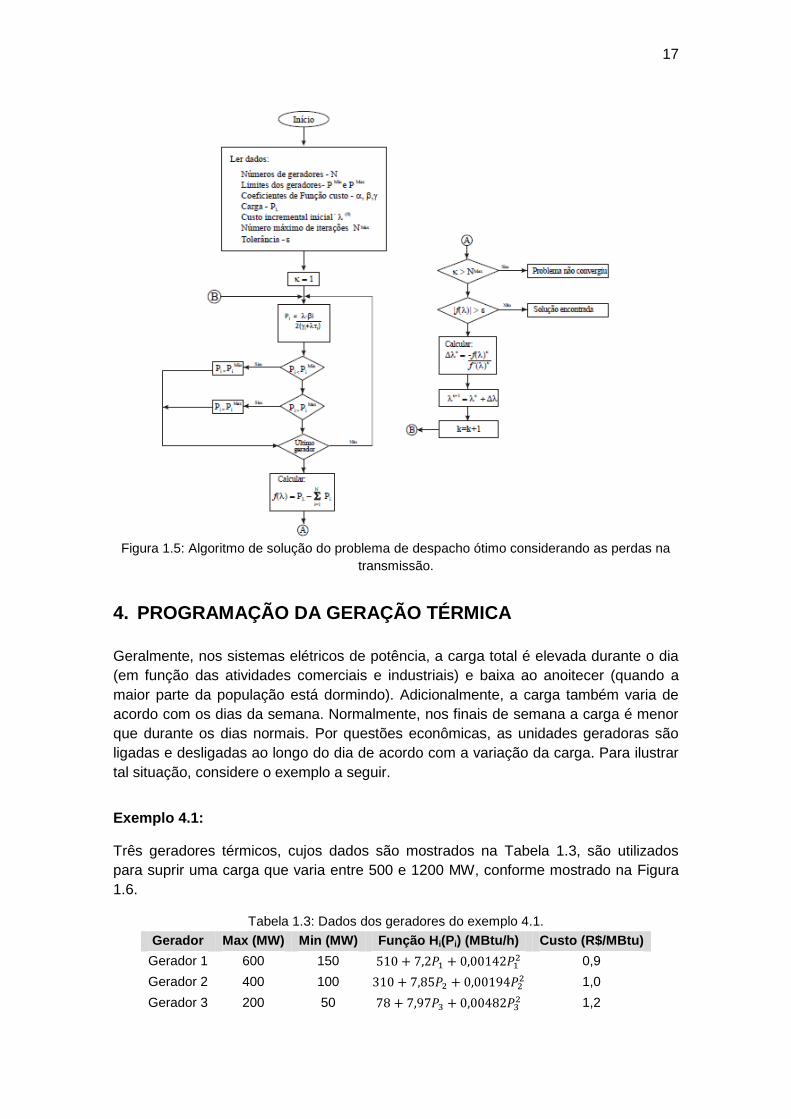
A Figura 1.5 resume os passos necessários para solucionar o problema de despacho
ótimo de geradores térmicos considerando as perdas na transmissão.
Exemplo 3.3:
Considere novamente as unidades do exemplo 1 sendo utilizadas para suprir uma
carga de 850 MW. Suponha agora que as perdas na transmissão são dadas por:
A tabela seguir resume os passos do algoritmo apresentado na Figura 1.6,
considerando que o custo incremental inicial foi de ( ) .
Tabela1.2: Resultados para o exemplo 3.3.
Iteração
0 9,5200 432,9942 298,5555 129,9812 15,6741 4,1433
1 9,5281 435,1186 299,9188 130,6360 15,8234 0,1500
2 9,5284 435,1955 299,9681 130,6597 15,8288 0,0054
17
Figura 1.5: Algoritmo de solução do problema de despacho ótimo considerando as perdas na
transmissão.
4. PROGRAMAÇÃO DA GERAÇÃO TÉRMICA
Geralmente, nos sistemas elétricos de potência, a carga total é elevada durante o dia
(em função das atividades comerciais e industriais) e baixa ao anoitecer (quando a
maior parte da população está dormindo). Adicionalmente, a carga também varia de
acordo com os dias da semana. Normalmente, nos finais de semana a carga é menor
que durante os dias normais. Por questões econômicas, as unidades geradoras são
ligadas e desligadas ao longo do dia de acordo com a variação da carga. Para ilustrar
tal situação, considere o exemplo a seguir.
Exemplo 4.1:
Três geradores térmicos, cujos dados são mostrados na Tabela 1.3, são utilizados
para suprir uma carga que varia entre 500 e 1200 MW, conforme mostrado na Figura
1.6.
Tabela 1.3: Dados dos geradores do exemplo 4.1.
Gerador Max (MW) Min (MW) Função Hi(Pi) (MBtu/h) Custo (R$/MBtu)
Gerador 1 600 150 0,9
Gerador 2 400 100 1,0
Gerador 3 200 50 1,2
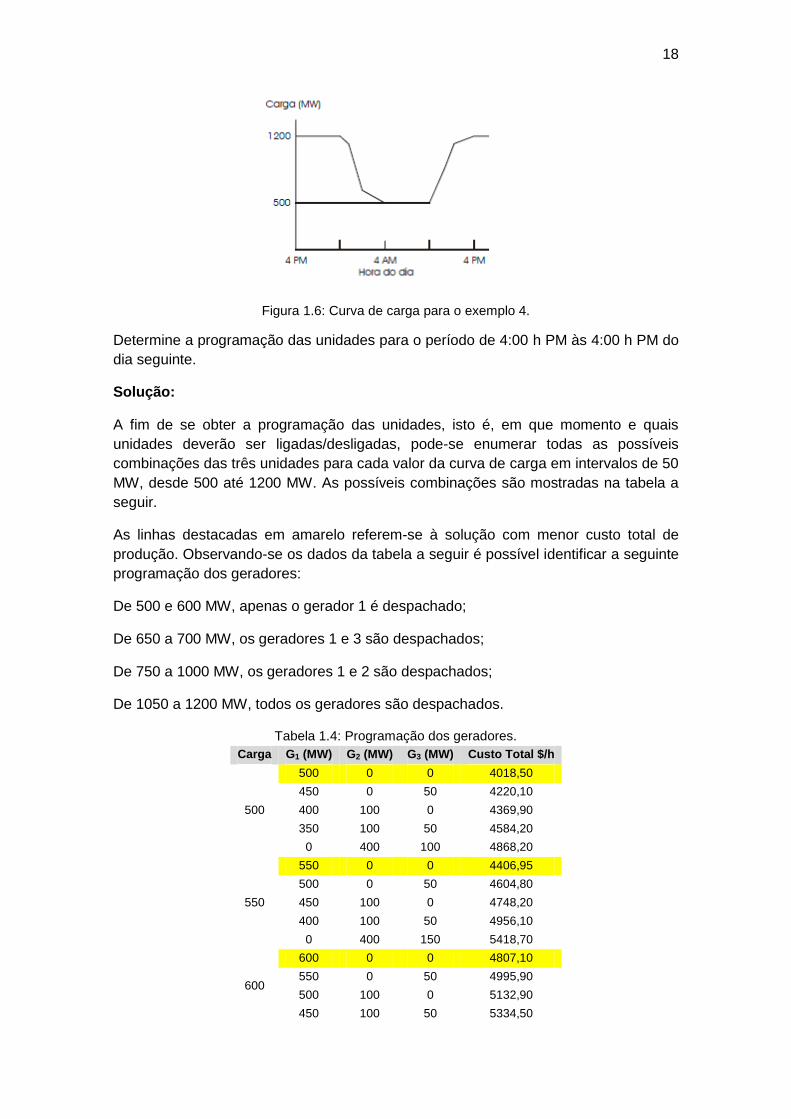
18
Figura 1.6: Curva de carga para o exemplo 4.
Determine a programação das unidades para o período de 4:00 h PM às 4:00 h PM do
dia seguinte.
Solução:
A fim de se obter a programação das unidades, isto é, em que momento e quais
unidades deverão ser ligadas/desligadas, pode-se enumerar todas as possíveis
combinações das três unidades para cada valor da curva de carga em intervalos de 50
MW, desde 500 até 1200 MW. As possíveis combinações são mostradas na tabela a
seguir.
As linhas destacadas em amarelo referem-se à solução com menor custo total de
produção. Observando-se os dados da tabela a seguir é possível identificar a seguinte
programação dos geradores:
De 500 e 600 MW, apenas o gerador 1 é despachado;
De 650 a 700 MW, os geradores 1 e 3 são despachados;
De 750 a 1000 MW, os geradores 1 e 2 são despachados;
De 1050 a 1200 MW, todos os geradores são despachados.
Tabela 1.4: Programação dos geradores.
Carga G1 (MW) G2 (MW) G3 (MW) Custo Total $/h
500
500 0 0 4018,50
450 0 50 4220,10
400 100 0 4369,90
350 100 50 4584,20
0 400 100 4868,20
550
550 0 0 4406,95
500 0 50 4604,80
450 100 0 4748,20
400 100 50 4956,10
0 400 150 5418,70
600
600 0 0 4807,10
550 0 50 4995,90
500 100 0 5132,90
450 100 50 5334,50

19
0 400 200 5998,10
650
600 0 50 5393,30
550 100 0 5524,00
500 100 50 5719,20
700
600 0 100 5914,90
600 100 0 5921,50
550 100 50 6110,30
750
600 150 0 6338,20
600 0 150 6465,40
600 100 50 6507,70
800
600 200 0 6764,70
600 150 50 6924,50
600 0 200 7044,80
850 600 250 0 7200,80
600 200 50 7350,90
900 600 300 0 7646,70
600 250 50 7787,10
950 600 350 0 8102,20
600 300 50 8232,90
1000 600 400 0 8567,50
600 350 50 8688,50
1050 600 400 50 9153,70
1100 600 400 100 9675,30
1150 600 400 150 10226,00
1200 600 400 200 10805,00
Esse é um exemplo simples de programação da geração, no qual as únicas restrições
atendidas são o nível de carga e os limites dos geradores. As subseções seguintes
abordam as demais restrições que devem ser levadas em conta na programação da
geração.
4.1 Reserva Girante
O termo reserva girante é utilizado para designar o montante total de geração
disponível de todas as unidades sincronizadas (i.e. que estão girando), menos a carga
suprida e as perdas. O montante de reserva girante deve ser tal que a perda de uma
ou mais unidades sincronizadas não cause alterações na frequência do sistema nem
ocasione corte de carga. Geralmente, o nível de reserva girante é especificado com
base em um conjunto de regras que define quanto de reserva dever ser deixado em
cada unidade geradora.
Historicamente, uma regra muito utilizada pelos operadores dos sistemas de potência
é especificar o montante de reserva girante como um percentual da carga pico do
sistema, ou uma quantidade equivalente à maior unidade geradora sincronizada. Outra
forma de especificar a reserva girante é com base no risco de não haver geração
suficiente para atender a carga.
A reserva girante não deve somente ser suficiente para cobrir a perda de unidades
geradoras, mas deve ser adequadamente distribuída entre as unidades com tempo
20
rápido de resposta (i.e., que podem ser sincronizadas em poucos minutos) e unidades
lentas (que levam dezenas de horas para serem sincronizadas). Isso permite que o
controle automático de geração restaure a frequência do sistema e mantenha os
intercâmbios de potência ativa entre áreas, caso ocorra a perda de unidades
sincronizadas.
4.2 Restrições Operacionais
As unidades térmicas requerem uma equipe de operadores responsáveis pelo controle
das mesmas, principalmente quando elas precisam ser ligadas ou desligadas. As
unidades térmicas suportam apenas variações pequenas de temperatura, o que
implica em um período longo (da ordem de algumas horas) para que a unidade esteja
pronta para suprir carga. Como resultado, algumas restrições operacionais de uma
central de geração termelétrica devem ser levadas em consideração no processo de
programação da geração:
Tempo mínimo de parada (minimum up time): quando uma unidade térmica está
em operação a mesma não pode ser desligada instantaneamente.
Tempo mínimo de partida (minimum down time): quando uma unidade está
desligada, é necessário um tempo mínimo para que ela seja posta em operação.
Disponibilidade de mão-de-obra: se uma central de geração termelétrica é
composta por duas ou mais unidades geradoras, essas unidades não podem ser
ligadas/desligadas simultaneamente se não houver operadores suficientes para
atender a todas as unidades.
Adicionalmente, as unidades térmicas necessitam de certa quantidade de energia
térmica para vencer a inércia das massas girantes, a qual não é convertida em energia
elétrica. Essa quantidade inicial de energia é considerada nos estudos de
programação da geração como custo de partida da unidade geradora (start-up cost).
O custo de partida das unidades térmicas pode variar desde um valor máximo, quando
a unidade é posta em operação com a caldeira fria (cold start) até valores
consideravelmente menores, quando a unidade é posta em operação poucos instantes
após ter sido desligada, e ainda se encontra com a temperatura próxima ao ponto de
operação. Esses dois custos podem ser aproximadamente estimados pelas equações
(1.23) e (1.24).
Custo de partida a frio (cooling):
(
⁄ ) (1.23)
Custo de partida a quente (baking):
21
(1.24)
em que:
– Energia térmica necessária para a partida a frio (MBtu);
– Energia térmica necessária para manter a unidade geradora na temperatura de
operação (MBtu/h);
– custo do combustível;
– Custo fixo (incluindo gastos com mão-de-obra, manutenção etc.);
– constante térmica da unidade geradora;
- tempo durante o qual aunidade permaneceu desligada.
4.3 Métodos de Solução
O problema de programação da geração é bem complexo. Para ter uma ideia da
dimensão do problema, considere um sistema formado por unidades geradoras
térmicas que devem ser programadas para suprir uma carga durante um período
dividido em intervalos. Então, enumerando as possíveis combinações de geradores
que devem ser examinadas em cada intervalo, tem-se:
( ) ( ) ( ) ( )
em que ( ) representa a combinação de item de maneiras diferentes.
Para um total de intervalos, o número máximo de combinações se torna ( ) ,
o que pode ser extramente grande dependendo do número de unidades geradoras e
da quantidade de intervalos. Por exemplo, para um período de 24 horas, dividido em
intervalos iguais de 1 hora, e 5 unidades geradoras seriam analisadas 6,2 1035
possibilidades.
4.3.1 Método da Lista de Prioridades
Um modo bastante simples de fazer a programação das unidades consiste em
construir uma lista de prioridade para as unidades geradoras. Essa lista pode ser
obtida com base no custo incremental das unidades para a condição de carregamento
máximo, ou seja:
( )
|
(1.25)
22
Para ilustrar, considere novamente as unidades do exemplo 4, para as quais o custo
médio é mostrado a seguir:
Tabela 1.5: Custo Médio de Produção.
Gerador Custo Médio ($/MWh)
1 8,0136
2 9,4020
3 11,8776
Então, seguindo fielmente a lista de prioridade anterior, as unidades são despachadas
na ordem 1, 2 e 3.
Os passos seguintes podem ser utilizados para programar a geração térmica,
utilizando o método da lista de prioridade.
i. A cada hora, quando a carga estiver decrescendo, determine a próxima
unidade da lista de prioridade que poderá ser desligada, sem afetar a carga
mais os requisitos de reserva girante;
ii. Determine o número de horas H, decorrido desde o instante que a unidade foi
desligada até o momento em que ela entrará em operação novamente
(considerando que a carga esteja decrescendo, mas se elevará algumas horas
à frente);
iii. Se H é menor que o tempo mínimo de partida, mantenha a unidade em
operação, senão, vá para o passo (iv);
iv. Calcule três custos de produção: a) soma dos custos de produção horário para
as próximas H horas considerando que a unidade esteja em operação; b) soma
dos custos de produção horário considerando que a unidade foi desligada mais
o custo de partida a frio da unidade (cooling); c) idem ao (b), porém utilizando o
custo de partida a quente (baking). Se o custo de desligar a unidade mais o
custo de partida (cooling ou baking) for menor que manter a unidade em
operação, desligue-a; senão mantenha a unidade em operação;
v. Repita os passos anteriores para as próximas unidades da lista de prioridade.

23
Exemplo 4.2:
Determine a programação do sistema de geração térmico dado a seguir.
Tabela 1.6: Dados dos geradores do exemplo 4.2.
Gerador Max (MW)
Min (MW)
Energia incremental (Btu/kWh)
Et(MBtu/h) Ec
(MBtu)
T. Min. Parada
(h)
T. Min. Partida
(h)
1 500 70 9950 300 800 2 2
2 250 40 10200 210 380 2 2
3 150 30 11000 120 110 2 4
4 150 30 11000 120 110 2 4
Tabela 1.7: Dados da carga do exemplo 4.2.
Intervalo Carga (MW)
1 600
2 800
3 700
4 950
Considere que o custo do combustível seja 1,0 $/MBtu, que inicialmente as unidades 1
e 2 estejam operando e que as unidades 3 e 4 estejam desligadas. Considere também
que as unidades 3 e 4 estão desligadas há 8 horas e que cada intervalo da carga dure
2 horas.
Solução:
Nesse problema assume-se que a curva ( ) de cada unidade é uma reta. Logo, o
custo incremental será constante. Os custos incrementais dos geradores são
calculados a seguir:
Então, as unidades serão despachadas na ordem: 1, 2 e 3.
Intervalo 1:
24
Dado que as unidades já se encontravam em operação, o custo de produção no
primeiro intervalo será:
Intervalo 2:
Como o gerador 3 estava desligado, para colocá-lo em operação deve-se
primeiramente verificar a restrição quanto ao tempo mínimo de partida. Como esse
gerador já se encontrava desligado por 8 horas, ele poderá ser ligado no início do
intervalo 2, pois o seu tempo mínimo de partida é de 4 horas. Em seguida, deve-se
calcular o custo de produção, lembrando que ao custo do gerador 3 deve-se adicionar
a parcela referente ao custo de partida.
Intervalo 3:
Nota-se que a carga diminui de 800 para 700 MW, o que implica que há a
possibilidade de o gerador 3 ser desligado. Entretanto, no quarto intervalo a carga
aumenta para 950 MW e, portanto, o gerador 3 deverá ser ligado novamente. Como
cada intervalo tem 2 horas de duração, não haverá tempo suficiente para partir o
gerador 3 caso ele seja desligado no início do intervalo 3. Sendo assim, o mesmo
deverá ser mantido em operação. Portanto, duas alternativas devem ser analisadas:
O gerador 3 não é despachado, mas é mantido aquecido:
O gerador 3 é despachado no mínimo:
Verifica-se que a segunda opção é mais econômica.
Intervalo 4:
25
Aqui, novamente, deve-se incluir o custo de partida a frio do gerador 4.
Finalmente, o custo total de produção no período é:
4.3.2 Programação Dinâmica
A programação dinâmica apresenta algumas vantagens com relação aos métodos
baseados na enumeração. A grande vantagem apresentada pela programação
dinâmica está na redução da dimensão do espaço de busca pela solução ótima do
problema. Para ser ter ideia de como algumas imposições reduzem a dimensão do
espaço de busca, suponha um sistema composto por quatro unidades térmicas sendo
utilizadas para suprir uma carga. Esse problema apresenta um total de 24 – 1 = 15
possíveis combinações para serem testadas. Entretanto, se uma lista de prioridade é
imposta, há somente quatro combinações para testar:
Unidade 1
Unidade 1 + Unidade 2
Unidade 1 + Unidade 2 + Unidade 3
Unidade 1 + Unidade 2 + Unidade 3 + Unidade 4
Para esse caso foi suposto que a unidade 1 é a primeira a ser despachada, em
seguida a unidade 2, e assim por diante até a unidade 4.
A imposição da lista de prioridade, baseada no custo incremental da unidade em plena
carga, resultará, teoricamente, no despacho correto, somente se:
A curva característica da unidade H(P) for linear entre zero e a capacidade
máxima de geração;
Não haver outras restrições;
O custo de partida for fixo.
26
Adicionalmente, as seguintes considerações são feitas:
Um estado consiste de uma matriz de unidades, na qual um determinado
número de unidades está operado e as demais desligadas;
O custo de partida das unidades é independente do tempo em que elas
permaneceram desligadas (i.e. custo de partida fixo);
Não são considerados custos para desligar as unidades;
Segue-se fielmente uma lista de prioridade e, a cada intervalo, uma quantidade
mínima de geração deve ser despachada.
Um estado será factível somente quando as unidades programadas forem capazes de
suprir a carga e respeitarem o valor mínimo de geração despachada em cada
intervalo.
É possível desenvolver um algoritmo baseado no método da programação dinâmica
que busque a solução ótima partindo do intervalo final em direção ao primeiro intervalo
(programação para trás – backward dynamic programming). Contrariamente, pode-se
também desenvolver o algoritmo que segue o curso natural do problema, ou seja,
parte da primeira hora em direção ao intervalo final (programação dinâmica para frente
– forward dynamics programming). O segundo método apresenta vantagens evidentes
com relação ao primeiro. Por exemplo, se o custo de partida de uma unidade é
expresso em função do tempo que a unidade permanece desligada, a programação
dinâmica para frente é mais indicada, uma vez que a condição do estado anterior pode
ser calculada a cada estágio.
O algoritmo recursivo para determinar o custo mínimo na hora k, no estado i, é
apresentado a seguir.
( ) [ ( ) ( ) ( )] (1.26)
em que:
( ) – menor custo total para chegar ao estado k no intervalo i;
( ) – custo de produção do estado k no intervalo i;

27
( ) – custo de transição do estado k-1, no intervalo l, para o estado k no
intervalo i.
Exemplo 4.3:
Determine a programação ótima do sistema termelétrico cujos dados são
apresentados a seguir. Utilize o método da programação dinâmica. Cada intervalo da
curva de carga tem duração de uma hora.
Tabela 1.8: Parâmetros dos geradores.
Gerador Max. (MW)
Min. (MW)
Custo vazio ($/h)
Custo incremental a plena carga ($/MWh)
T. Min. de partida (h)
T. Min de parada (h)
1 80 25 213 23,54 4 2
2 250 60 585,62 20,34 5 3
3 300 75 684,74 19,74 5 4
4 60 20 252 28 1 1
Tabela 1.9: Condição inicial de operação, custos e tempos de partida.
Gerador Condição
Inicial Duração
(h)
Custo de partida ($) Tempo de partida a frio
(h) Frio Quente
1 Desligado 5 350 150 4
2 Ligado 8 400 170 5
3 Ligado 8 1100 500 5
4 Desligado 6 0,02 0 0
Tabela 1.10: Curva de carga.
Hora Carga (MW)
1 450
2 530
3 600
4 540
5 400
6 280
7 290
8 500
Obs.: considerar que a função custo das unidades seja da forma dada a seguir:
( ) ( )
Solução:
O primeiro passo para resolver o problema é construir a lista de prioridade com base
nos custos incrementais das unidades. Para o exemplo em questão, tem-se:

28
Tabela 1.11: Lista de prioridade.
Prioridade Custo ($/MWh) Gerador
1 19,74 3
2 20,34 2
3 23,54 1
4 28,00 4
Intervalo 1:
Das condições iniciais, tem-se que os geradores 2 e 3 encontravam-se ligados e os
geradores 1 e 4 desligados. Sendo assim, para os geradores 2 e 3 são despachados
para atender a carga de 450 MW. Então, o custo associado à hora 1, para a condição
dos geradores 2 e 3 ligados é:
( ) ( ) ( )
O custo mínimo até o primeiro intervalo será considerado zero. Assumindo também
que não houve transição de um estado anterior, tem-se:
( ) ( )
Intervalo 2:
Nesse intervalo, a carga sobe para 530 MW. As unidades 2 e 3 têm capacidade
suficiente para atender essa carga, não sendo necessário por em operação a próxima
unidade da lista de prioridade. Logo,
( ) ( ) ( )
O custo mínimo até o segundo intervalo é:
( ) ( ) ( )
( )
Intervalo 3:
Nesse intervalo, a carga sobe para 600 MW, implicando na necessidade de por a
próxima unidade da lista de prioridade em operação. Então, as seguintes opções
devem ser analisadas:
1) Por a unidade 1 em operação:
29
A unidade 1 precisa de 4 horas para partir. Dado que ela se encontrava desligada por
5 horas no início da análise, ela terá permanecido 7 horas desligada até o início do
intervalo 3. Então, o custo de transição do intervalo 2 no estado 1 (unidades 2 e 3
ligadas) para o intervalo 3 no estado 2 (unidades 1, 2 e 3 ligadas) equivale ao custo de
partida a frio da unidade 1, ou seja:
( )
Supondo que a decisão tenha sido ligar a unidade 1, o custo de produção no intervalo
3 seria:
( ) ( ) ( ) ( )
Sendo assim, o custo até o intervalo 3, considerando a decisão de ligar a máquina 1 é:
( ) ( ) ( ) ( )
( )
2) Por a unidade 4 em operação:
No caso da unidade 4, esta também poderá estar em operação no intervalo 3. O custo
de transição nesse caso será equivalente ao custo de partida a frio da unidade 4.
( )
Supondo que a decisão tenha sido ligar a unidade 4, o custo de produção no intervalo
3 seria:
( ) ( ) ( ) ( )
O custo até o intervalo 3, considerando que a decisão tenha sido ligar a unidade 4 é:
( ) ( ) ( ) ( )
( )
Verifica-se que a decisão mais econômica é que a unidade 4 seja ligada para operar
no intervalo 4.
Intervalo 4:
No intervalo 4, a carga diminui para 540 MW, o que implica que a unidade 4 poderá
ser desligada. Verificando os próximos intervalos nota-se que a carga continua
decrescendo. Portanto, a melhor alternativa é, de fato, desligar a unidade 4. Sendo
assim, do intervalo 3 para o intervalo 4 não haverá custo de transição e o custo de
produção nesse intervalo será de:
( ) ( )

30
O custo total até o intervalo 4 é:
( ) ( ) ( )
( )
Intervalo 5:
No intervalo 5, a carga diminui para 400 MW. Novamente, as unidades 2 e 3 são
suficientes para suprir essa carga.
( ) ( ) ( )
( ) ( ) ( )
( )
Intervalo 6:
No intervalo 6, a carga cai para 280 MW. Nessa condição há três possibilidades a
serem analisadas:
1) Desligar a unidade 2:
Essa alternativa não é possível, pois no intervalo 8 a carga sobe para 500 MW e,
portanto, a unidade 2 deverá ser ligada novamente. Como essa unidade apresenta um
tempo mínimo de partida de 5 horas, não há como satisfazer essa restrição.
2) Manter a unidade 2 aquecida, mas sem despachá-la:
( ) ( )
O custo de transição do intervalo 5 para o intervalo 6 equivale ao custo de manter a
unidade 2 operando sem carga, isto é:
( )
O custo final acumulado até o intervalo 6 é:
( ) ( ) ( ) ( )
( )
3) Despachar a unidade 2 no mínimo:
( ) ( ) ( )
( ) ( ) ( )
( )

31
Intervalo 7:
No intervalo 7, a carga sobe para 290 MW. Nesse caso, novamente, têm-se duas
possibilidades:
1) Manter a unidade 2 aquecida, mas sem despachá-la:
( ) ( )
Então, o custo até o intervalo 7 assumindo que a decisão anterior tenha sido manter a
unidade aquecida, mas sem despachá-la é:
( ) ( ) ( ) ( )
( )
ou o custo até o intervalo 7 considerando que a decisão anterior foi manter a unidade
2 gerando no mínimo:
( ) ( ) ( ) ( )
( )
2) Despachar a unidade 2 no mínimo:
( ) ( ) ( )
O custo até o intervalo 7, assumindo que a decisão anterior foi manter a unidade 2
aquecida, mas sem despachá-la é:
( ) ( ) ( ) ( )
( )
ou o custo até o intervalo 7, considerando que a decisão anterior foi despachar a
unidade 2 no mínimo:
( ) ( ) ( ) ( )
( )
Intervalo 8:
No intervalo 8, a carga sobe para 500 MW. Como as unidades 2 e 3 são capazes de
suprir essa carga, não é necessário por em operação uma nova unidade.
( ) ( ) ( )
Assumindo que a decisão anterior tenha sido manter a unidade 2 ligada, mas sem
despachá-la, tem-se:
( ) ( ) ( ) ( )
32
( )
ou considerando que a decisão tenha sido manter a unidade 2 gerando no mínimo:
( ) ( ) ( ) ( )
( )
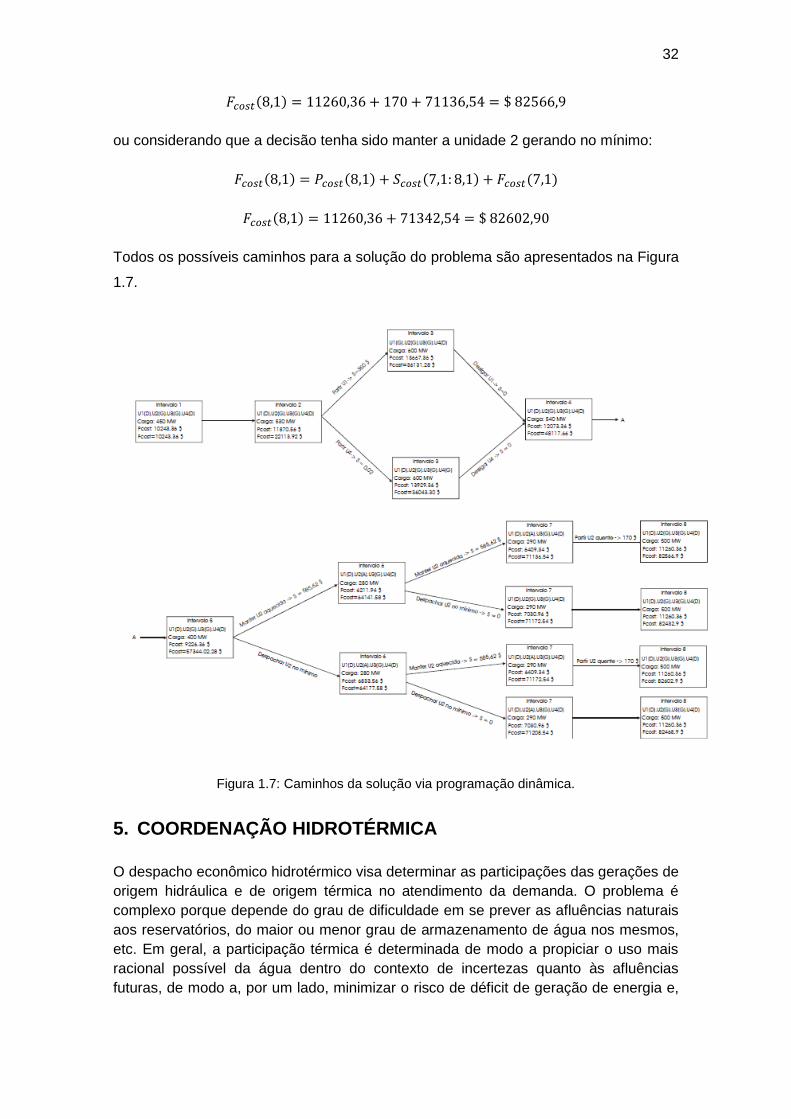
Todos os possíveis caminhos para a solução do problema são apresentados na Figura
1.7.
Figura 1.7: Caminhos da solução via programação dinâmica.
5. COORDENAÇÃO HIDROTÉRMICA
O despacho econômico hidrotérmico visa determinar as participações das gerações de
origem hidráulica e de origem térmica no atendimento da demanda. O problema é
complexo porque depende do grau de dificuldade em se prever as afluências naturais
aos reservatórios, do maior ou menor grau de armazenamento de água nos mesmos,
etc. Em geral, a participação térmica é determinada de modo a propiciar o uso mais
racional possível da água dentro do contexto de incertezas quanto às afluências
futuras, de modo a, por um lado, minimizar o risco de déficit de geração de energia e,
33
por outro, reduzir o desperdício de energia hidráulica implicado por vertimento de
volumes de água turbináveis.
Para melhor tratar as incertezas associadas às afluências aos reservatórios e ao
crescimento da carga, o problema de programação da operação de sistemas
hidrotérmicos é, em geral, abordado em horizontes de tempo distintos. Quanto maior o
horizonte de planejamento, tanto menos detalhada e mais incerta é a programação.
Os horizontes usuais de planejamento da operação são os seguintes:
Programação de longo prazo: Considera o horizonte de cinco anos com intervalos
mensais para determinar as participações da geração hidráulica e térmica e o
intercâmbio de energia. Os reservatórios são agregados em um reservatório
equivalente.
Programação de médio prazo: Considera o horizonte de um ano com intervalos
semanais. Utiliza métodos de previsão de vazões para determinar as participações
hidráulica e térmica no atendimento da demanda.
Programação de curto prazo: Neste caso o horizonte é semanal com intervalos de
horas. Em geral, a abordagem é determinística, e aspectos energéticos, hidráulicos e
elétricos são considerados simultaneamente. Assim, a rede elétrica, os intercâmbios e
as características das unidades são todos representados.
O foco deste documento são estudos de curto prazo. Entretanto, para uma melhor
compreensão do processo de programação da operação hidrotérmica, a próxima
seção faz algumas considerações sobre os estudos de médio prazo.
5.1 Programação da Operação Hidrotérmica de Médio Prazo
Os métodos usualmente empregados no horizonte anual podem ser agrupados como:
Métodos empíricos: Baseiam-se na história passada, prevendo situações
semelhantes;
Métodos baseados em simulação: São aperfeiçoamentos dos métodos
empíricos, utilizando modelos matemáticos que permitem analisar um grande
número de casos, dos quais se deduz uma solução (não necessariamente a ótima
global);
Métodos precisos: Resolvem o problema por meio de técnicas de otimização, por
exemplo, programação dinâmica estocástica, necessitando, portanto, de modelos
matemáticos mais sofisticados.
Dentre os métodos utilizados no horizonte de médio e longo prazo, destacam-se a
estratégia baseada na curva limite do reservatório equivalente do sistema e a
estratégia baseada no valor marginal da água.
34
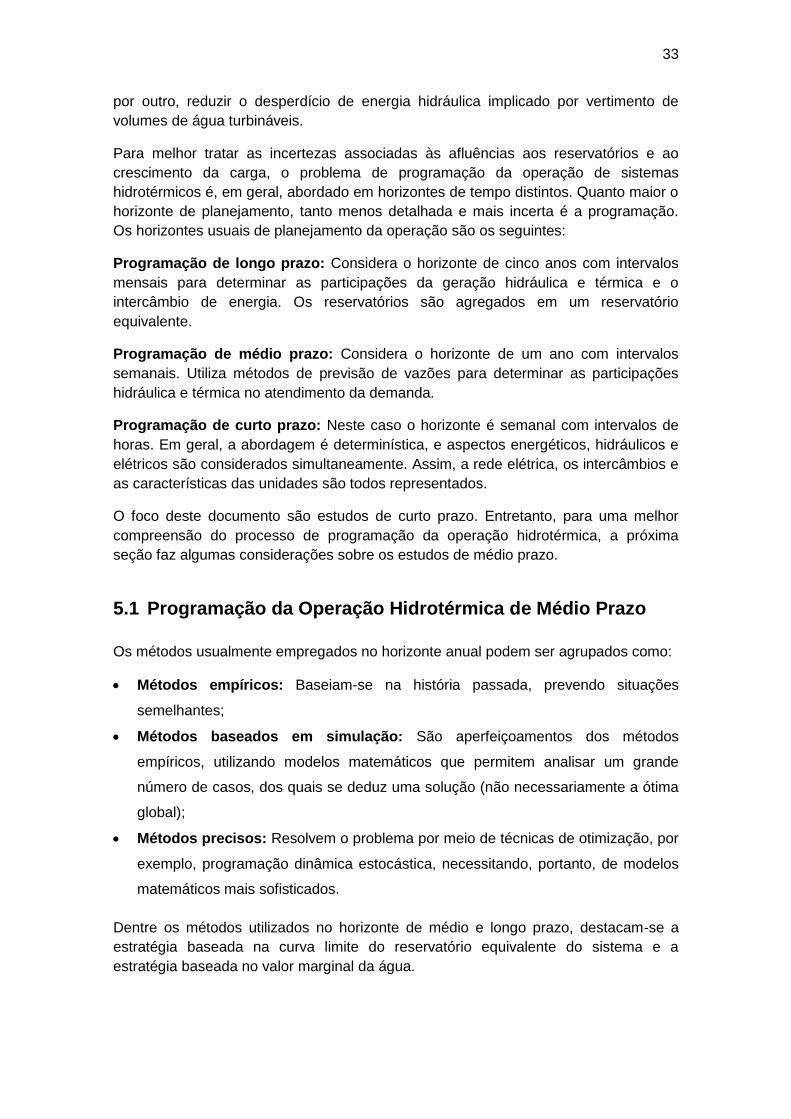
5.2 Estratégia Baseada na Curva Limite
Trata-se de uma estratégia tradicional. A curva limite indica o nível de armazenamento
do sistema abaixo do qual as usinas térmicas devem ser acionadas para garantir o
atendimento da demanda, tendo por base o histórico das vazões registradas no
passado. Procura-se, portanto, chegar ao fim do período de planejamento sem
ocorrência de déficits.
A curva limite ilustrada na Figura 1.8 é obtida por meio de simulação da operação do
sistema para um dado ano hidrológico.
Figura 1.8: Curva limite para programação hidrotérmica de médio prazo.
Durante a operação ao longo do ano hidrológico procura-se acompanhar a curva
limite, ora aumentando-a, se o nível do reservatório está abaixo da curva limite. Com
isso procura-se evitar vertimento (desperdício) de água e o risco de déficit de
suprimento que resultaria da exaustão do volume útil armazenado. Essa técnica
conduz a uma expectativa elevada de atendimento, mas com altos custos de geração
térmica fora dos períodos secos.
5.3 Estratégia Baseada no Valor Marginal da Água
Neste caso, busca-se minimizar o custo total de atendimento da demanda, que inclui o
custo da geração térmica mais o custo do déficit. Em outras palavras, procura-se
operar com a geração térmica mínima nos períodos hidrológicos favoráveis e elevar a
geração térmica nos períodos com hidrologias adversas.
Para operacionalizar esta estratégia é necessário definir o valor marginal da água.
Esse valor é definido como a derivada do custo esperado atualizado da geração
térmica e da energia não suprida em relação à produção da energia hidráulica ao
longo de um período. Em outras palavras, o valor marginal da água representa o
acréscimo de custo decorrente da utilização de uma unidade de energia armazenada
ao longo do período. O valor marginal da água está associado a cada estado do
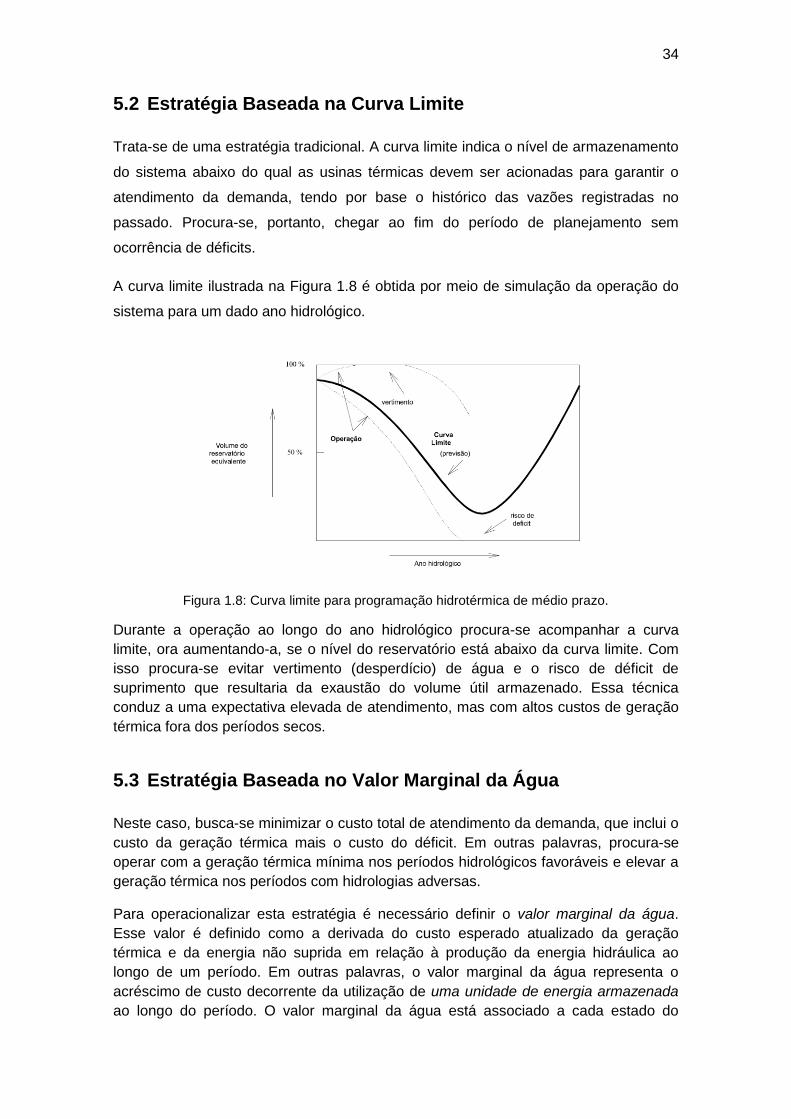
35
sistema, caracterizado por um nível de armazenamento e pela tendência hidrológica
(i.e., quando a expectativa de afluências é mais pessimista que o valor corrente). A
Figura 1.9 ilustra essa dependência.
Com a disponibilidade do valor marginal da água para os diferentes estados de
operação do sistema é possível definir um problema de otimização para determinar a
estratégia ótima de operação das térmicas. Por exemplo, para um dado estado de
operação, as térmicas de custo marginal inferior ao valor marginal da água devem
operar no máximo, uma vez que é mais econômico que gerar com as usinas
hidráulicas. Por outro lado, as térmicas de custo marginal superior ao valor marginal
da água devem operar no mínimo.
Figura 1.9: Variação do valor marginal da água com a tendência hidrológica e o nível de armazenamento do reservatório.
5.4 Planejamento da Operação Hidrotérmica de Curto Prazo
Nesta seção serão vistos dois problemas típicos de planejamento da operação
hidrotérmica no horizonte de curto prazo:
Em sistemas hidrotérmicos nos quais há predominância de geração de origem
hidráulica, busca-se em geral minimizar os custos da geração térmica.
Frequentemente, estes problemas são do tipo de programação de energia, em que
há restrições energéticas para a geração hidráulica e, portanto, há a necessidade
de se operar as térmicas em subintervalos do horizonte de tempo de interesse.
Em sistemas hidrotérmicos nos quais há equilíbrio entre as gerações de origem
térmica e hidráulica, ou em que a primeira predomina sobre a segunda, o objetivo
é minimizar os custos da geração térmica, porém, reconhecendo as diversas
restrições hidráulicas existentes.
36
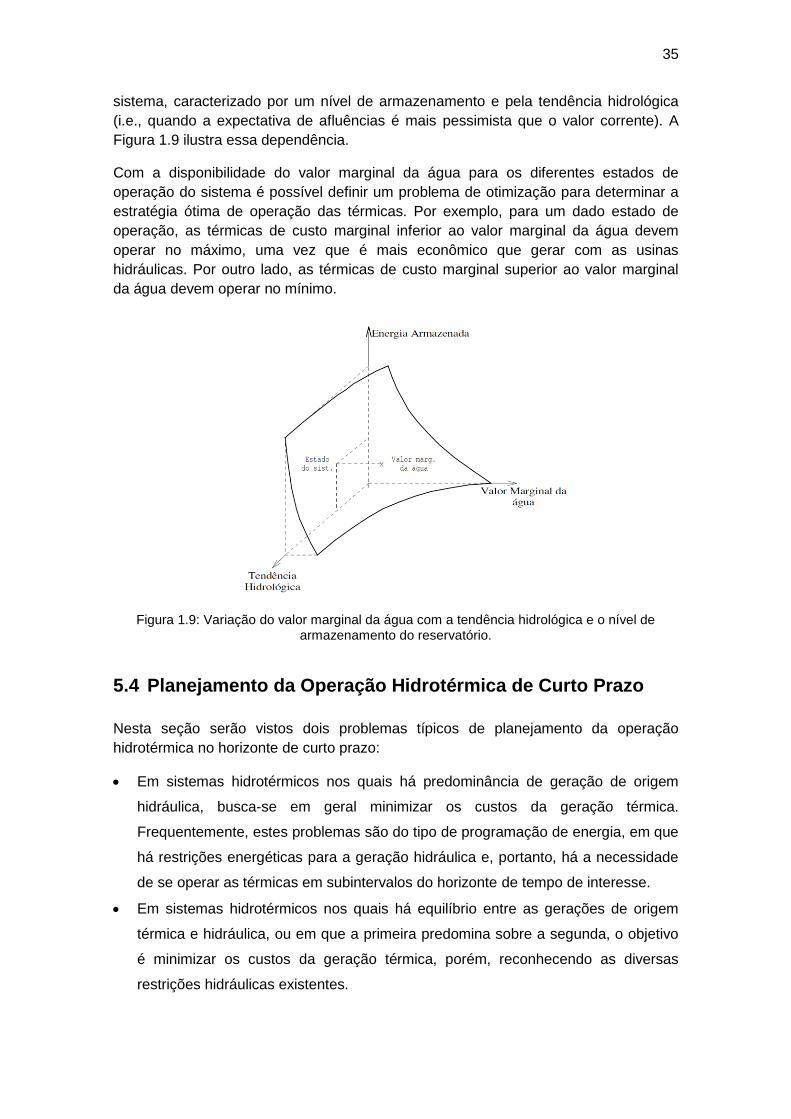
5.4.1 Programação Hidrotérmica com Restrições de Energia Hidráulica
Considere o sistema formado por uma usina térmica (UTE) e uma usina hidrelétrica
(UHE) equivalentes alimentando uma carga, conforme ilustrado na Figura 1.10.
Considera-se que a expressão da vazão em função da potência gerada pelo
hidrogerador, é conhecida. Da mesma forma, é conhecida a função de custo de
produção da usina termelétrica ( ). Além disso, considera-se que ambas as
potências geradas, assim como a carga, variam com o tempo ao longo do horizonte
considerado. O horizonte de análise com duração é dividido em intervalos,
os quais duram horas.
Figura 1.10: Sistema hidrotérmico formado por uma usina térmica e uma usina hidrelétrica equivalentes.
Ou, em termos matemáticos, pode-se dizer:
∑
(1.27)
As potências geradas e a carga, para cada intervalo , são designadas por: ,
e
.
No problema de programação hidrotérmica com restrição de energia, considera-se que
UHE tem capacidade suficiente para suprir a carga por um período limitado de tempo,
mas a energia de origem hidráulica disponível é insuficiente para alimentar a carga
durante todo o horizonte de análise. Em termos matemáticos, essa condição é
expressa pelas equações (1.28) e (1.29).
(1.28)

37
∑ ∑
(1.29)
O objetivo da programação de energia é utilizar toda a energia hidráulica disponível
durante o horizonte de tempo de modo a minimizar o custo de funcionamento das
térmicas. Da restrição energética dada por (1.29), verifica-se que a energia gerada
pelas térmicas durante o horizonte de tempo deve ser dada por:
∑ ∑
(1.30)
Além disso, não se exige que a térmica funcione durante todo o horizonte de análise
( ). Sendo assim, seja o número de intervalos de operação da unidade térmica,
então:
∑
(1.31)
e
∑
(1.32)
O problema de coordenação hidrotérmica com restrição de energia pode, então, ser
formulado como:
( ) ∑ ( )
(1.33)
s.a:
∑
Na equação anterior o vetor , é composto por:

38
A função de Lagrange correspondente ao problema (1.33) é:
( ) ∑ ( ) ( ∑
)
(1.34)
Uma condição de otimalidade para o problema (1.33) é:
( )
(
)
(1.35)
Como é constante, a condição (1.35) implica que a UTE deve operar a custo
incremental constante durante todo o período de tempo em que está em operação.
Dada a natureza monotônica da função ( ), isto significa que a potência gerada
pela UTE deve ser constante ao longo de todo o seu intervalo de funcionamento.
Seja, então, , o valor ótimo constante da geração térmica, isto é:
(1.36)
Da condição (1.32), tem-se que
∑ ∑
(1.37)
ou
(1.38)
A equação (1.36) permite também reescrever o custo total da térmica como:

39
( ) ( ) ∑ (
)
(1.39)
Assumindo que a função custo de produção da térmica pode ser aproximada por uma
função quadrática do tipo
( ) (
)
Nota-se que a equação (39) assume a forma
( ) (
)
ou ainda, utilizando a equação (1.38), tem-se
( ) [ (
)
]
(1.40)
Observe que, essencialmente, os passos desde a equação (1.34) até (1.40)
correspondem à interpretação da restrição (1.31) e a avaliação do impacto desta
interpretação sobre a função objetivo do problema (1.33). Esse problema pode ser
reduzido ao seguinte problema de otimização sem restrições:
( )
cuja solução é obtida de
( )
Logo,
√
(1.41)
A equação (1.41) indica que o despacho ótimo da térmica independe de e
corresponde ao ponto mais eficiente de operação da UTE. Conclui-se que a solução
ótima para o problema de despacho de energia requer que a UTE seja despachada a
potência constante durante todo o seu período de funcionamento. A princípio, a UTE
pode iniciar sua operação a qualquer instante do horizonte de tempo entre e
. Entretanto, convém que a entrada em operação seja logo no início do
horizonte de análise, pois qualquer alteração de previsão, seja de demanda, seja de
disponibilidade hidrelétrica, deverá ser atendia via maior ou menor participação
40
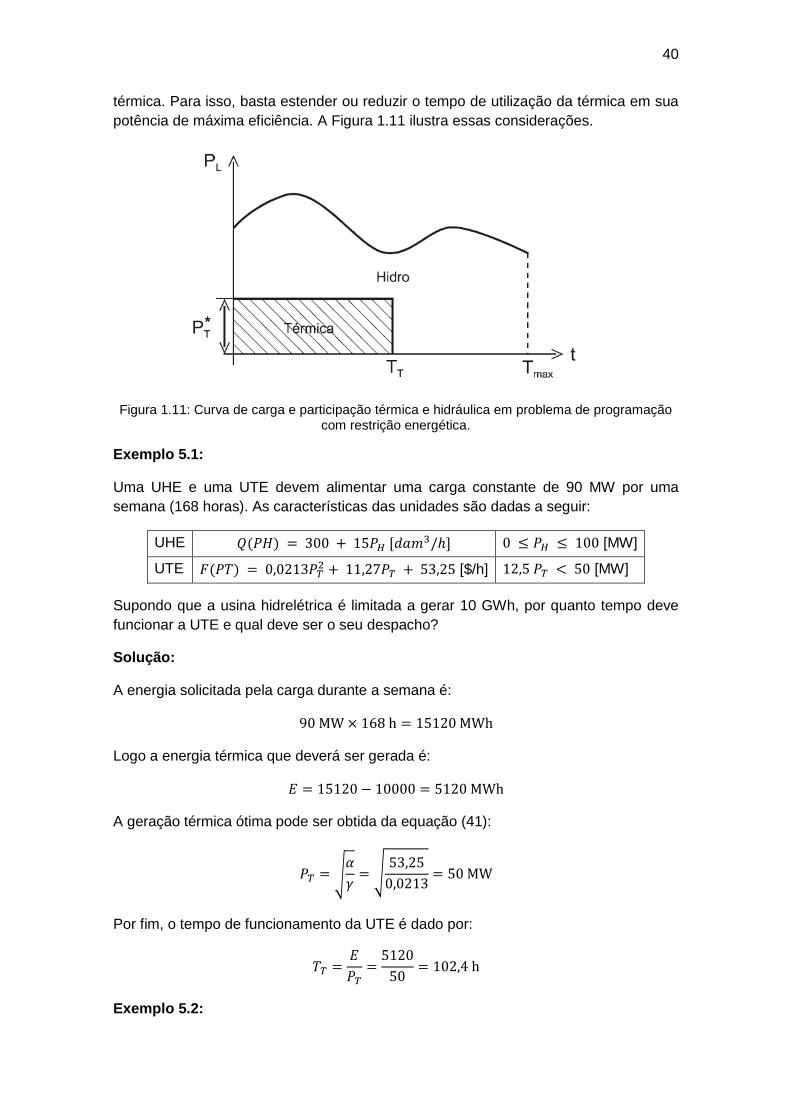
térmica. Para isso, basta estender ou reduzir o tempo de utilização da térmica em sua
potência de máxima eficiência. A Figura 1.11 ilustra essas considerações.
Figura 1.11: Curva de carga e participação térmica e hidráulica em problema de programação com restrição energética.
Exemplo 5.1:
Uma UHE e uma UTE devem alimentar uma carga constante de 90 MW por uma
semana (168 horas). As características das unidades são dadas a seguir:
UHE ( ) [MW]
UTE ( ) [$/h] [MW]
Supondo que a usina hidrelétrica é limitada a gerar 10 GWh, por quanto tempo deve
funcionar a UTE e qual deve ser o seu despacho?
Solução:
A energia solicitada pela carga durante a semana é:
Logo a energia térmica que deverá ser gerada é:
A geração térmica ótima pode ser obtida da equação (41):
√
√
Por fim, o tempo de funcionamento da UTE é dado por:
Exemplo 5.2:
41
Suponha agora que o limite de energia para a UHE do Exemplo 1 seja expresso em
termos do volume de água pelo qual o reservatório da usina pode ser deplecionado
durante a semana. Supondo que o máximo deplecionamento admissível seja de
250.000 dam3 para a semana e que os demais dados do Exemplo 1 permaneçam os
mesmos, por quanto tempo a térmica deve funcionar?
Solução:
No Exemplo 1 foi determinado que a UTE deve gerar 50 MW, independentemente do
valor de . Consequentemente, a UHE deverá gerar os 40 MW restantes no período
em que a UTE estiver em operação. A vazão neste período será:
Logo, o volume turbinado nesse período será: .
Quando apenas a UHE estiver operando, tem-se:
( )
Como ( ) está limitado a 250.000 dam3, tem-se:
( )
Resolvendo essa equação, chega-se a:
5.4.2 Programação Hidrotérmica Considerando as Perdas na
Transmissão
Outro problema de coordenação hidrotérmica de muito interesse prático é aquele em
que se requer que um dado volume de água seja utilizado para minimizar o custo de
operação das térmicas, que neste caso são supostas operar durante todo o horizonte
de tempo de estudo, uma vez que se considera que a geração de origem hidráulica
não tem potência suficiente para alimentar a carga. Estes aspectos diferenciam a
programação hidrotérmica de curto prazo do problema de programação com restrições
de energia abordado na Subseção 5.4.1.
Para apresentar o problema, será considerado um sistema formado por uma UTE e
uma UHE equivalentes. Há um máximo volume de água que pode ser turbinado ao
longo do período horas, definido com base nos estudos de planejamento da
operação de médio prazo. Será também suposta a ausência de vertimento e ainda que
a altura da coluna de água no reservatório permanece aproximadamente constante ao
longo do horizonte de estudo. Esta última hipótese implica que a potência produzida
pela UHE depende essencialmente da vazão turbinada. Sendo assim, é possível
expressar a vazão no intervalo como uma função da potência hidrelétrica gerada
.
42
Seja o volume disponível para ser turbinado durante o horizonte horas, que
como antes, é dividido em intervalos, sendo que , tem duração
de horas. O problema de programação hidrotérmica de curto prazo pode, então, ser
formulado como:
( ) ∑ ( )
(1.42)
s.a:
∑ ( )
Na equação anterior, é a carga do sistema no intervalo e
representa as
perdas na transmissão no intervalo . Supõe-se que a carga é constante ao longo de
cada intervalo e a relação entre e continua sendo dada pela equação (27).
A função de Lagrange relativa ao problema (42) é dada por:
( ) ∑ [ ( ) (
)] [∑ (
)
]
(1.43)
em que
[
]
[
]
são os multiplicadores de Lagrange associados às restrições de
balanço de potência ativa em cada intervalo de tempo, e é o multiplicador de
Lagrange associado à restrição de volume.
Note que a restrição de volume é apenas uma, mas envolve todas as potências
geradas na UHE em cada intervalo de tempo . Pelo fato de envolver todos os
intervalos do horizonte de tempo estudado, esse tipo de restrição é chamado de
restrição intertemporal.
As condições necessárias para a solução ótima do problema (1.42) em um dado
intervalo são:

43
( )
(
) (1.44)
(
)
(
) (1.45)
As equações (1.44) e (1.45) podem ser reescritas como:
(
)
( )
(1.46)
(
)
(
)
(1.47)
As equações (1.46) e (1.47) são chamadas equações de coordenação hidrotérmica.
Supondo inicialmente um caso particular em que as perdas na transmissão são
desprezadas e que também os intervalos de tempo são de igual duração, isto é,
.
Neste caso, as equações (1.46) e (1.47) se tornam:
(
)
(1.48)
(
)
(1.49)
Adicionalmente, supondo que a função ( ) possa ser aproximada por
( )
de tal modo que (
) , vê-se da equação (1.49) que, sob as
hipóteses consideradas, será constante ao longo de todos os intervalos de tempo.
Levando este resultado à equação (1.48), facilmente conclui-se que as térmicas
44
deverão operar com custos incrementais constantes, o que por sua vez implica em
que as potências geradas pelas térmicas serão igualmente constantes durante todo o
horizonte de estudo.
Esta versão simplificada da coordenação hidrotérmica também possibilita uma
interpretação bastante útil do multiplicador de Lagrange . Para tanto, é válido
relembrar a relação entre a função de consumo e a função custo de produção ,
dada por:
( ) ( )
em que é o custo do combustível. Substituindo essa relação na equação (1.48),
obtém-se:
(
)
(1.50)
Comparando as equações (1.49) e (1.50) e levando em conta que e
desempenham um papel similar como funções que traduzem a taxa de entrada de
energia para a UTE e para a UHE, respectivamente, pode-se concluir que a variável ,
medida em $/dam3, deve ter um papel análogo a , expresso em $/MBtu. Então, a
variável representa o valor marginal da água.
Considerando dois volumes de água disponíveis para serem turbinados por uma UHE
sob as mesmas condições, e , , pode-se esperar que, se e
são valores marginais da água correspondentes, então, .
É importante salientar que as conclusões anteriores também pressupõem que nenhum
limite de geração foi atingido.
Exemplo 5.3:
Uma carga deve ser alimentada durante 24 horas por uma UHE e uma UTE cujas
características são dadas a seguir:
Tabela 1.12: Parâmetros dos geradores do exemplo 5.3.
Usina Função Limites
UHE ( ) [dam3/h]
UTE ( ) [$/MWh]
Os efeitos das perdas na transmissão são considerados desprezíveis, o máximo
volume a ser turbinado é de 100.000 dam3 e a carga varia conforme se mostra a
seguir:

45
Tabela 1.13: Dados da carga do exemplo 5.3.
Período Carga (MW)
00:00 – 12:00 1200
12:00 – 24:00 1500
Determine os despachos da UHE e da UTE ao longo do período, bem como os custos
marginais de energia do sistema e o custo marginal da água.
Solução:
Sabe-se que horas. Como as perdas são desprezadas, podem-se
aplicar as conclusões da subseção 4.2.2 e, portanto,
.
Das equações de balanço de potência, tem-se que:
Da equação da restrição de volume, tem-se
( ) (
)
Como , vem
( ) ( )
Resolvendo a equação anterior encontra-se:
e consequentemente:
Os multiplicadores de Lagrange das equações de balanço de energia podem ser
obtidos por:
(
)
( )
E o custo marginal da água é obtido por:
(
)
Logo, .

46
Exercício:
Considere o sistema termelétrico composto por uma UTE e uma UHE (equivalentes)
cujos dados são mostrados a seguir.
Tabela 1.14: Parâmetros dos geradores.
Usina Funções Limites
UTE ( )
UHE ( )
A carga do sistema varia conforme os dados a seguir.
Tabela 1.15: Dados da carga.
Período Carga (MW)
00:00 – 08:00 600
08:00 – 16:00 700
16:00 – 24:00 500
Sabe-se que a UHE conta com um reservatório com capacidade de 33600 dam3 que
pode ser utilizado ao longo do dia. Determine o despacho da UTE e da UHE, bem
como os custos marginais de energia e da água.
5.4.3 Programação Hidrotérmica via Método Computacional
No caso geral em que as perdas de transmissão não podem ser desprezadas, a
solução das equações de coordenação hidrotérmica (1.46) e (1.47) juntamente com as
restrições de balanço de energia e volume do problema (1.42) forma um conjunto de
( ) equações não-lineares para determinar igual número de incógnitas.
Será apresentado a seguir um algoritmo computacional para resolver este problema.
O método computacional apresentado a seguir é denominado consiste em três laços:
o mais interno é um laço iterativo que ajusta os multiplicadores de Lagrange para obter
uma solução das equações de coordenação hidrotérmica e da equação de balanço de
potência; o laço intermediário serve apenas para incrementar os intervalos de tempo
até esgotar o horizonte de tempo estudado; finalmente, o laço mais externo ajusta
iterativamente o mais externo ajusta o multiplicador de Lagrange da restrição de
volume.
Novamente, será assumido que função ( ) é do tipo: e que a função
( ) é do tipo: . No caso das perdas na transmissão será assumido que as
perdas se relacionam com as potências hidráulica e térmica geradas, por meio da
equação (51).
(1.51)

47
Levando a função ( ) e função das perdas para a equação (1.44), e isolando o
termo , chega-se a:
( )
(1.52)
Procedendo de modo semelhante para a equação (1.45), chega-se a:
(1.53)
Levando as equações (1.52) e (1.53) para a restrição do balanço de potência:
( )
[
( )] (
)
(1.54)
Por fim, substituindo na função da restrição de volume, tem-se:
( ) ∑
(
)
(1.55)
As equações (1.52) a (1.54) podem ser utilizadas iterativamente para determinar a
solução ótima do problema de programação hidrotérmica de curto prazo, seguindo-se
os passos do algoritmo apresentado a seguir.
Passos do algoritmo:
1. Inicializar as variáveis: , e ;
2. Inicializar o contador de intervalos: ;
3. Determinar as potências hidráulica e térmica, utilizando as equações (1.52) e
(1.53).
4. Verificar os limites inferior e superior das variáveis e
, caso estejam fora
dos limites fazer a variável que violou igual ao limite violado;
5. Verificar a equação do balanço de potência: | ( )| . Em caso afirmativo,
prosseguir para o passo 6, senão atualizar o valor de e retornar ao passo 3.
6. Calcular ( );
7. Se , ir para o passo 8, senão fazer e retornar ao passo 3;

48
8. Verificar se a restrição de volume é atendida: | ∑ ( ( ))
| . Se
a restrição foi satisfeita, encerrar o processo iterativo; senão atualizar o valor
de e voltar ao passo 2.
O valor de é poder atualizado seguindo-se o processo a seguir.
(1.56)
sendo dado por:
( )
( ) (1.57)
Na equação (1.57), ( ) representa a derivada da função dada em (1.54) em
relação à .
( ) ( )
( )
( ) (1.58)
De modo semelhante, o valor de pode ser atualizado a cada iteração.
(1.59)
sendo dado por:
( )
( ) (1.60)
Derivando a função dada em (1.55) em relação a variável , obtém-se:
( ) ∑
(1.61)
49
Exemplo 5.4:
Reconsidere o Exemplo 3, agora supondo que a UHE está localizada a certa
distância da carga, tal que as perdas na transmissão são significativas e
dependem apenas de , sendo dadas por:
Encontre os novos despachos da UHE e da UTE, bem como os multiplicadores de
Lagrange e as perdas na transmissão.
Solução:
Considerando
e , como a estimativa inicial para as
variáveis. Como tolerância, adotou-se o valor 10-3 MW para o desvio de potência
ativa e 5 dam3 para o desvio de volume.
O problema foi resolvido utilizando-se um programa desenvolvido em Matlab, o
qual é apresentado no Anexo. Os resultados obtidos são mostrados na Tabela
1.16, a seguir.
Tabela 1.16: Resultados do Exemplo 5.4.
Inter. Dur.
(h)
Carga
(MW)
PH
(MW)
PT
(MW)
λ
($/MW)
Perdas
(MW)
µ
($/dam3)
q
(dam3/h)
Custo
($)
1 12 1200 668,3 567,4 135,458 35,73 2,028 3651,5 76653,7
2 12 1500 875,6 685,7 140,700 61,33 2,028 4681,7 92988,9
5.4.4 Coordenação Hidrotérmica via Programação Dinâmica
Com o propósito de explicar a aplicação da programação dinâmica à solução do
problema de despacho hidrotérmico será considerado um sistema simplificado,
composto por uma unidade térmica e uma unidade hidrelétrica equivalentes. Para tal,
considere o modelo simplificado de um sistema hidrelétrico apresentado na Figura
1.12.
Figura 1.12: Modelo hidrotérmico utilizado na programação dinâmica.
Sejam as seguintes variáveis do problema:

50
– vazão afluente durante o período ;
– vazão vertida durante o período ;
– volume armazenado ao final do período ;
– vazão turbinada durante o período ;
– potência hidrelétrica gerada durante o período ;
– potência termelétrica gerada durante o período ;
– potência da carga no período ;
– função custo de produção no período ;
A restrição operacional da usina hidrelétrica é dada soba a forma de volumes, sendo
que no instante tem-se o volume e ao final do período de operação (
), deseja-se ter o volume .
Para a central termelétrica assume-se que o custo de produção é uma função
polinomial de segunda ordem da potência térmica produzida ( ( ) ).
Também para a central hidrelétrica será assumido que a vazão turbinada é uma
função polinomial da potência hidrelétrica gerada ( ( ) ).
Se cada intervalo tem duração de horas, o volume armazenado ao final do
intervalo é dado por:
( ) (1.62)
Assumindo que não haverá vertimento, ou seja, . Sejam e os
volumes no início e ao final do intervalo , respectivamente. Então, tem-se que:
( )
(1.63)
em que a vazão deve ser maior que zero e menor que uma vazão máxima ( ),
correspondente à capacidade máxima de geração da usina hidrelétrica.
O problema de coordenação hidrotérmica consiste em determinar o menor custo de
produção para atender à carga no período especificado, obedecendo às restrições
energéticas do sistema hidrelétrico, definidas pela capacidade mínima e máxima de
armazenamento.
Então, sejam:
– estado/condição de volume no início do intervalo ;
51
– estado/condição de volume ao final do intervalo ;
( ) – custo de produção acumulado até o final do intervalo ;
( ) – custo de produção para ir do intervalo no estado de volume
para o intervalo no estado de volume .
O algoritmo de programação dinâmica é muito simples. Basta que a cada intervalo
sejam determinados os custos de produção para diferentes estados de
armazenamento. A solução final é a trajetória que resulta no menor custo de produção
acumulado ao longo do período. Então,
( )
(1.64)
( ) ( ) ( )
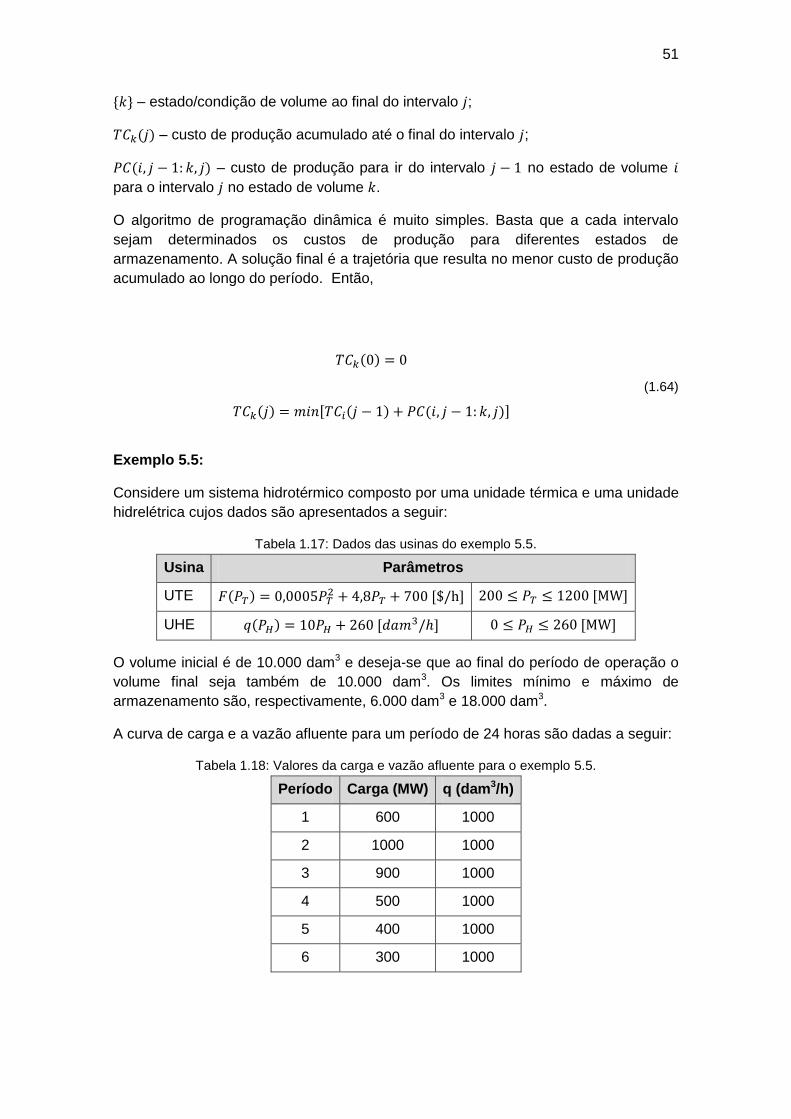
Exemplo 5.5:
Considere um sistema hidrotérmico composto por uma unidade térmica e uma unidade
hidrelétrica cujos dados são apresentados a seguir:
Tabela 1.17: Dados das usinas do exemplo 5.5.
Usina Parâmetros
UTE ( )
UHE ( )
O volume inicial é de 10.000 dam3 e deseja-se que ao final do período de operação o
volume final seja também de 10.000 dam3. Os limites mínimo e máximo de
armazenamento são, respectivamente, 6.000 dam3 e 18.000 dam3.
A curva de carga e a vazão afluente para um período de 24 horas são dadas a seguir:
Tabela 1.18: Valores da carga e vazão afluente para o exemplo 5.5.
Período Carga (MW) q (dam3/h)
1 600 1000
2 1000 1000
3 900 1000
4 500 1000
5 400 1000
6 300 1000
52
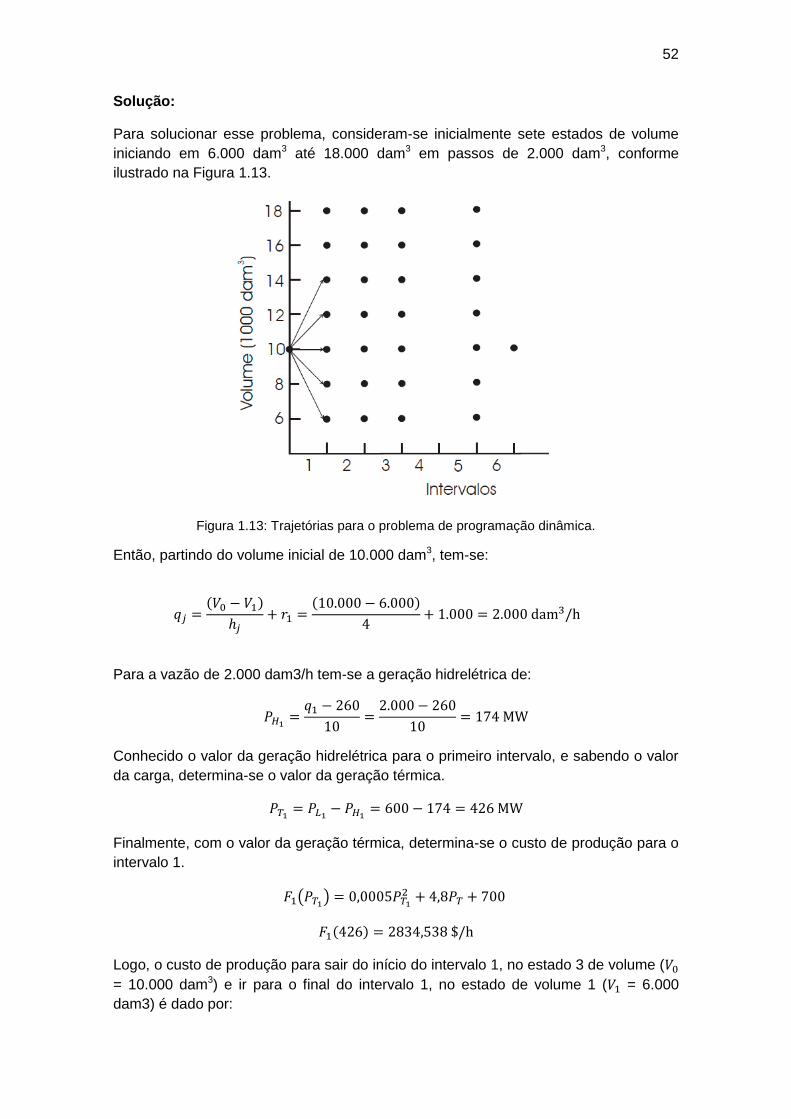
Solução:
Para solucionar esse problema, consideram-se inicialmente sete estados de volume
iniciando em 6.000 dam3 até 18.000 dam3 em passos de 2.000 dam3, conforme
ilustrado na Figura 1.13.
Figura 1.13: Trajetórias para o problema de programação dinâmica.
Então, partindo do volume inicial de 10.000 dam3, tem-se:
( )
( )
Para a vazão de 2.000 dam3/h tem-se a geração hidrelétrica de:
Conhecido o valor da geração hidrelétrica para o primeiro intervalo, e sabendo o valor
da carga, determina-se o valor da geração térmica.
Finalmente, com o valor da geração térmica, determina-se o custo de produção para o
intervalo 1.
( )
( )
Logo, o custo de produção para sair do início do intervalo 1, no estado 3 de volume (
= 10.000 dam3) e ir para o final do intervalo 1, no estado de volume 1 ( = 6.000
dam3) é dado por:

53
( )
O custo acumulado até o final do primeiro intervalo para o estado de volume 1 é:
Realizando-se os cálculos para os demais estados de volume e intervalos, chega-se a
solução ótima, esquematicamente representada na Figura 1.14, para a qual o custo
acumulado até o final do intervalo 6 é de $ 81.738,8.
Figura 1.14: Solução ótima.
6. FLUXO DE POTÊNCIA ÓTIMO
Os sistemas elétricos de potência têm se tornado cada vez mais interligados e
extensos, abrangendo grandes áreas e atendendo demandas cada vez maiores. A
intensificação desse processo, somada a fatores como a desregulamentação do setor
e a contínua incorporação de novas tecnologias de equipamentos têm aumentado
consideravelmente a complexidade operacional dos sistemas de potência. Esses fatos
têm sinalizado a necessidade de aprimoramento dos métodos dedicados ao
planejamento e controle da operação, que propiciem ações seguras, tanto do ponto de
vista técnico quanto econômico.
O fluxo de potência ótimo (FPO) é uma opção diante à necessidade de desenvolver
uma ferramenta mais inteligente e eficiente que proporcione aos planejadores do
sistema habilidades para analisar problemas complexos que envolvem múltiplas
variáveis e alternativas soluções.
Em linhas gerais, o problema de FPO consiste na otimização de uma função objetivo
(e.g. minimização do custo de operação) enquanto que simultaneamente um conjunto
de restrições físicas e operacionais impostas pelas limitações dos equipamentos e
exigências de segurança em um sistema de potência é atendido.
54
6.1 Formulação do Problema
O problema de FPO é caracterizado como um problema de otimização não linear com
restrições, o qual pode ser matematicamente formulado como se segue.
( )
(1.65)
s.a:
( )
( )
em que:
– vetor de variáveis de estado do sistema;
( ) – restrições de igualdade;
( ) – restrições de desigualdade;
– limites inferior e superior dos controles.
As restrições de igualdade correspondem à modelagem da rede (equações de balanço
de potência ativa e reativa em cada nó da rede), enquanto que as restrições de
desigualdade representam os limites das variáveis do sistema (restrições funcionais
dos equipamentos e operacionais do sistema).
6.1.1 Restrições de Igualdade
As restrições de igualdade básicas do FPO correspondem às equações do balanço de
potências ativa e reativa do fluxo de potência A.C. Contudo, cada problema a ser
estudado é um caso particular, tendo um objetivo específico. Dependendo do tipo de
aplicação, novas restrições ou equações podem ser acrescentadas, como aquelas
relativas ao intercâmbio de potência entre áreas.
As principais restrições de igualdade utilizadas em problemas de FPO são
apresentadas a seguir em sua forma geral.
Equação de Balanço de Potência Ativa:
∑ ( )
(1.66)
em que:
55
– conjunto de barras ligadas à barra ;
– fluxo de potência ativa da barra para a barra ;
– potência ativa gerada na barra ;
– fator de carga (em pu) na barra ;
– parcela da carga do tipo potência constante;
– parcela da carga que varia linearmente com a tensão;
– parcela da carga que varia com o quadrado da tensão;
– carga ativa na barra ;
– módulo da tensão na barra ;
– injeção de potência ativa na barra .
Equação de Balanço de Potência Reativa:
∑
( )
(1.67)
em que:
– conjunto de barras ligadas à barra ;
– fluxo de potência reativa da barra para a barra ;
– potência reativa gerada na barra ;
– injeção de potência reativa capacitiva na barra ;
– injeção de potência reativa indutiva na barra ;
– módulo da tensão na barra ;
– susceptância shunt ligada à barra ;
– fator de carga (em pu) da barra ;
– parcela da carga tipo potência constante;
– parcela da carga que varia linearmente com a tensão;
– parcela da carga que varia com o quadrado da tensão;
– carga reativa na barra i.
Intercâmbio de Potência entre Áreas:

56
∑
∑ ∑ ∑
(1.68)
em que:
– intercâmbio líquido na área ;
– fluxo de potência ativa no circuito – ;
– conjunto de circuitos de interligação – , tal que a medição é realizada no nó e o
nó pertence à área ;
– conjunto de circuitos de interligação – , tal que a medição é realizada no nó e
nó pertence à área ;
– conjunto de circuitos de interligação – , tal que a medição é realizada no nó e o
nó não pertence à área ;
– conjunto de circuitos de interligação – , tal que a medição é realizada no nó e o
nó não pertence à área .
6.1.2 Restrições de Desigualdade
As restrições de desigualdade correspondem às restrições funcionais do tipo máximo
carregamento em circuitos. Essas restrições refletem limites de operação dos
equipamentos, ou alguma política operativa específica.
Módulo da Tensão:
(1.69)
Potência Ativa Gerada:
(1.70)
Potência Reativa Gerada:
(1.71)
Tap do Transformador:
(1.72)
57
Rejeição de Carga:
Existem algumas situações, como em sistemas com problemas de tensão ou
carregamento dos circuitos, por exemplo, em que pode ser necessário reduzir a carga
em determinadas barras de forma a viabilizar a operação do sistema. Esses cortes de
carga são modelados matematicamente por meio do fator , presente nas equações
de balanço de potência ativa e reativa. Esse fator encontra-se dentro dos seguintes
limites:
(1.73)
Observe que = 1 significa que a carga total da barra é considerada, enquanto que
= 0 anula o valor da carga.
Intercâmbio de Potência entre Áreas:
(1.74)
Máximo Carregamento dos Circuitos:
( )
(1.75)
6.1.3 Funções Objetivo
Dependendo do tipo de aplicação do problema de FPO, as funções objetivo podem ser
lineares ou não lineares. Adicionalmente, podem ser utilizadas isoladamente ou
combinadas entre si. A seguir apresentam-se as funções objetivo mais utilizadas.
Mínimo Custo de Geração Ativa:
∑
(1.76)
em que:
– conjunto de geradores cujas potências ativa são controladas;
– custo de geração ativa do gerador ;
– geração ativa do gerador .
Mínima Injeção de Potência Reativa:

58
∑ ∑
(1.77)
em que:
– conjunto de barras candidatas à injeção de potência reativa capacitiva;
– potência reativa capacitiva injetada na barra ;
– conjunto de barras candidatas à injeção de potência reativa indutiva;
– potência reativa indutiva injetada na barra .
Mínima Perda:
∑ ( )
(1.78)
em que:
– conjunto de circuitos do sistema;
, – fluxo de potência ativa nos circuitos – e – .
Mínimo Corte de Carga:
∑
(1.79)
em que:
– conjunto de barras de carga;
– fração de carga efetiva na barra i;
– carga original da barra i;
– fração da carga cortada na barra i.
6.2 Fluxo de Potência Ótimo Linearizado
O fluxo de potência ativa em uma linha de transmissão é proporcional à abertura
angular na linha e se desloca no sentido dos ângulos maiores para os ângulos
menores. A relação existente entre os fluxos de potência ativa e as aberturas
angulares é semelhante à relação existente entre os fluxos de corrente e as quedas de
tensão em um circuito de corrente contínua. Sendo assim, é possível desenvolver um

59
modelo aproximado, conhecido como fluxo de potência DC, que permite estimar, com
baixo custo computacional e precisão aceitável para muitas aplicações, a distribuição
dos fluxos de potência ativa em uma rede de transmissão. Esse modelo simplificado é
bastante utilizado nos estudos de planejamento da expansão de sistemas de
transmissão.
Deste ponto em diante, o problema de fluxo de potência ótimo (FPO) será formulado
com base no modelo de fluxo de potência linearizado ou DC. Entretanto, antes de dar
início à modelagem matemática do problema de FPO linearizado, é pertinente fazer
uma breve revisão sobre programação linear.
Um grande número de problemas, tratados por técnicas de otimização, pode ser
resolvido diretamente ou por meio de simplificações pelas técnicas de programação
linear (PL), formulado por meio de funções lineares.
De forma matemática, o problema de programação linear pode ser apresentado como
se mostra em (1.80).
(1.80)
( )
( )
( )
A equação anterior pode ser escrita de modo compacto, como mostrado em (1.81).
(1.81)
em que representa o vetor de coeficientes da função objetivo linear, a matriz
contém os coeficientes de restrições lineares do problema e representa o vetor de
termos independentes.
A aplicação do método simplex [1] e [2] para a solução de problemas de programação
linear baseia-se nos seguintes princípios:
Conjuntos de soluções convexos: o espaço definido pelo conjunto de restrições
lineares é convexo, isto é, qualquer combinação linear de duas soluções quaisquer
pertencentes a este espaço é também viável. A Figura 1.15 dá exemplos de espaços
convexos e não convexos em problemas de duas variáveis.

60
Ótimo em um ponto extremo do conjunto de soluções: dada uma função objetivo
linear e um espaço de soluções definido por restrições lineares, a solução ótima do
problema corresponde a um vértice ou aresta do poliedro definido. A Figura 1.16
ilustra essa característica.
Figura 1.15: Espaço de soluções.
Figura 1.16: Solução ótima no extremo da região viável.
Exemplo 6.1:
Considere que um produtor independente possui duas unidades geradoras localizadas
em pontos diferentes no sistema. Os custos de produção e de venda da energia são
distintos para cada gerador. O produtor deseja vender o máximo possível de energia,
sem, no entanto, extrapolar o limite monetário estabelecido por ele para a produção de
energia. Os dados do problema são apresentados a seguir.
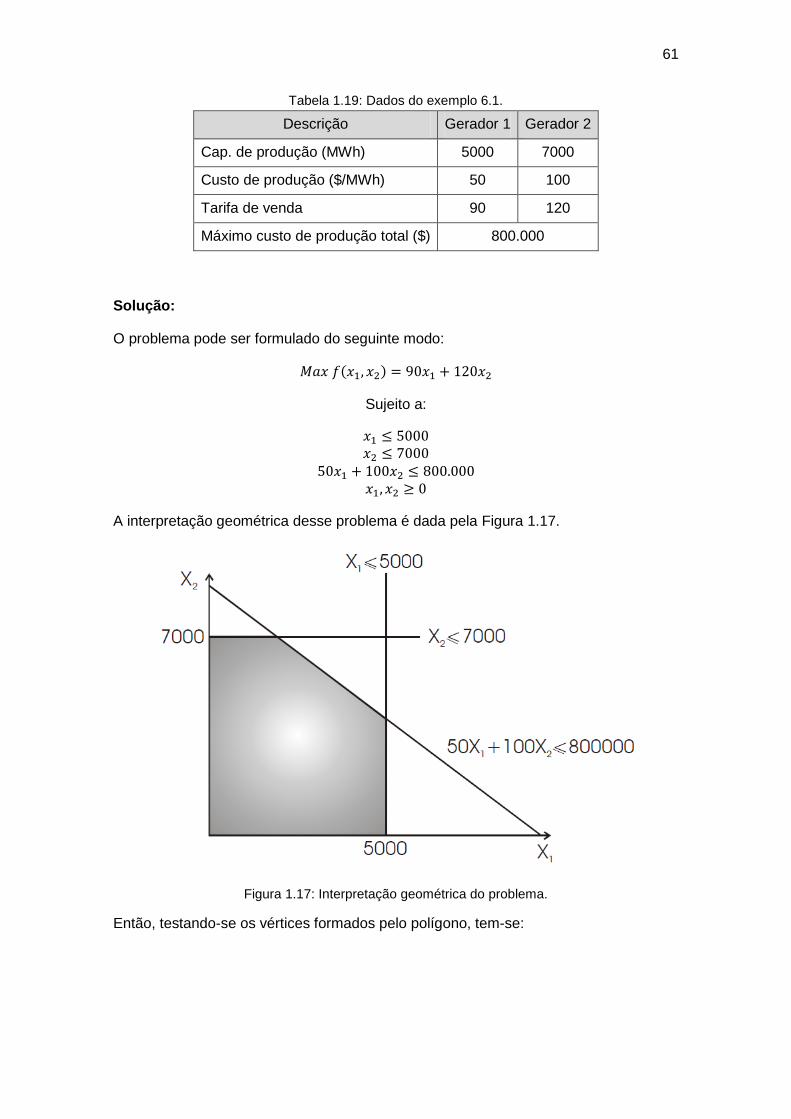
61
Tabela 1.19: Dados do exemplo 6.1.
Descrição Gerador 1 Gerador 2
Cap. de produção (MWh) 5000 7000
Custo de produção ($/MWh) 50 100
Tarifa de venda 90 120
Máximo custo de produção total ($) 800.000
Solução:
O problema pode ser formulado do seguinte modo:
( )
Sujeito a:
A interpretação geométrica desse problema é dada pela Figura 1.17.
Figura 1.17: Interpretação geométrica do problema.
Então, testando-se os vértices formados pelo polígono, tem-se:

62
Tabela 1.20: Soluções possíveis.
( )
0 0 0
0 7000 840.000
2000 7000 1.020.000
5000 5500 1.110.000
5000 0 450.000
Logo, os valores de e que maximizam a função objetivo e ao mesmo tempo
satisfazem às restrições é e , para os quais a função objetivo
vale $ 1.110.000.
6.2.1 Formulação do FPO Utilizando o Modelo Linearizado
Neste tópico é apresentada a formulação do problema de FPO para um caso particular
em que o modelo linear do fluxo de potência (fluxo DC) é utilizado.
As hipóteses simplificadoras que permitem utilizar o modelo linearizado para
determinar os fluxos numa rede elétrica são:
Os módulos das tensões são supostos iguais a 1,0 pu para todas as barras;
As resistências e as admitâncias shunts das linhas são desprezadas;
As aberturas angulares entre as barras (nós) da rede são supostas suficientemente
pequenas de modo que ( – ) ( – ) radianos.
Com essas hipóteses, o fluxo de potência ativa na linha é dado por:
( ) (1.82)
Sendo assim, a injeção líquida de potência ativa numa barra qualquer é dada por:
∑ ∑ ( )
(1.83)
em que representa o conjunto de barras conectadas à barra .
Definindo a matriz de susceptância do fluxo de potência linearizado como:
63
[ ∑
∑
∑
]
(1.84)
Da matriz anterior, nota-se que:
( ) ∑
( )
Além disso, é fácil verificar que:
( ) ∑ ( ) (1.85)
ou na forma matricial
(1.86)
Nota-se também na matriz anterior que a soma das linhas ou colunas é igual a zero e,
portanto, a matriz é singular. Isso significa que as N equações implícitas em (1.86)
são linearmente dependentes e, portanto, não podem ser utilizadas para definir
restrições de igualdade do problema de FPO. Uma maneira de eliminar a redundância
dessas equações é definir o ângulo de uma barra como sendo a referência angular
do sistema ( ). Essa definição implica em eliminar a coluna da matriz .
Sendo assim,
(1.87)
6.2.2 Restrições de Balanço de Potência
A equação (1.87) não pode ser utilizada como restrição de balanço de potência para o
problema de FPO linearizado porque o vetor P de injeções de potência ativa as barras
ainda tem que ser expresso como função das potências geradas e das potências das
cargas nas barras.
64
Para considerar as potências geradas, seja , o número de geradores do sistema de
potência. Definindo-se a matriz de incidência barras-geradores, , como sendo matriz
cujos elementos são dados por:
( ) {
(1.88)
Sejam ainda [
] o vetor das potências ativas geradas nas
barras de geração e [
] o vetor das cargas ativas nas
barras do sistema. O vetor de potências ativas injetadas nas barras pode, portanto, ser
escrito como:
(1.89)
Sendo assim, pode-se escrever a restrição de balanço de potência ativa para o
problema de FPO linearizado, conforme mostrado em (1.90):
(1.90)
6.2.3 Restrições de Limites de Geração
De modo semelhante ao problema de despacho econômico, os limites máximo e
mínimo de geração devem ser considerados como restrições de desigualdade no
problema de FPO.
Sejam os vetores e
, ambos com dimensão , que contêm os limites
mínimo e máximo de potência gerada para cada gerador do sistema. As restrições de
geração são dadas por:
(1.91)
6.2.4 Restrições de Limite de Fluxo de Potência Ativa nos Circuitos
Além das restrições de balanço de potência ativa dadas pela equação (1.90), que são
restrições de igualdade, consideram-se também no problema de FPO os limites
impostos sobre os fluxos de potência ativa nos ramos (linhas de transmissão e
transformadores), que são restrições de desigualdade.
Tais limites são devidos tanto às limitações térmicas dos condutores quanto às
restrições de estabilidade.

65
Seja o limite máximo de fluxo de potência no ramo – . Essa restrição pode ser
representada por:
(1.92)
ou
| ( )| (1.93)
A equação (93) é aplicada a cada um dos ramos do sistema.
Para permitir a formulação matricial do problema de FPO, considere a matriz de
incidência ramos-barras, com dimensão , dada por:
( ) {
(1.94)
A partir da matriz de incidência ramos-barras definida anteriormente, obtém-se a
matriz reduzida eliminando a coluna correspondente à barra de referência.
Adicionalmente, seja a matriz primitiva das susceptâncias dos ramos, dada por:
( ) (1.95)
Finalmente, pode-se verificar que o vetor de fluxos nas linhas é dado por:
(1.96)
Sendo assim, as restrições de fluxo de potência ativa nos circuitos podem ser escritas
na forma matricial:
(1.97)
Agora, pode-se formular o problema de FPO linearizado.
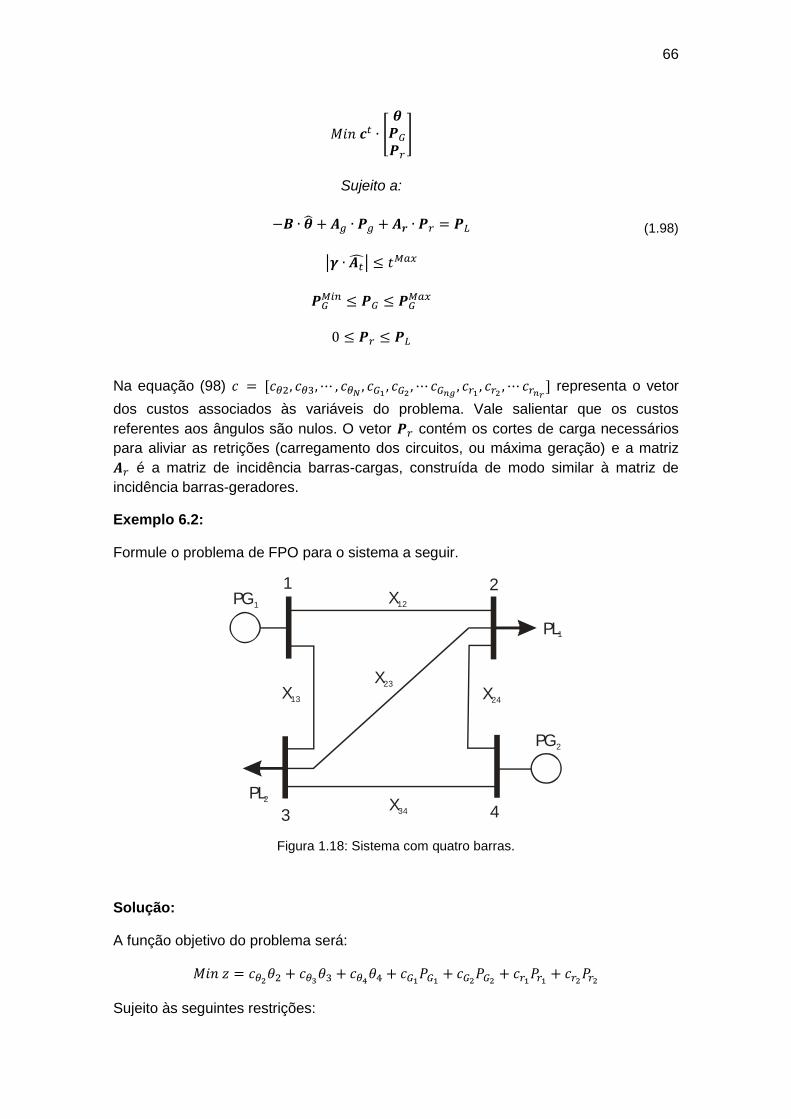
66
[
]
Sujeito a:
(1.98)
| |
Na equação (98)
representa o vetor
dos custos associados às variáveis do problema. Vale salientar que os custos
referentes aos ângulos são nulos. O vetor contém os cortes de carga necessários
para aliviar as retrições (carregamento dos circuitos, ou máxima geração) e a matriz
é a matriz de incidência barras-cargas, construída de modo similar à matriz de
incidência barras-geradores.
Exemplo 6.2:
Formule o problema de FPO para o sistema a seguir.
1 2
3 4
X12
X13 X24
X34
X23
PG1
PG2
PL1
PL2
Figura 1.18: Sistema com quatro barras.
Solução:
A função objetivo do problema será:
Sujeito às seguintes restrições:

67
Restrições de igualdade:
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( )
Assumindo que a barra 1 seja a referência angular, i.e., , obtém-se:
( )
( )
( )
Restrições de desigualdade:
Fluxo na linha 1-2, sentido de 1 para 2:
( )
Fluxo na linha 1-3, sentido de 1 para 3:
( )
Fluxo na linha 2-3, sentido de 2 para 3:
( )
Fluxo na linha 2-4, sentido de 2 para 4:
( )
Fluxo na linha 3-4, sentido de 3 para 4:
( )
Fluxo na linha 1-2, sentido de 2 para 1:
( )
Fluxo na linha 1-3, sentido de 3 para 1:
( )
Fluxo na linha 2-3, sentido de 3 para 2:
( )

68
Fluxo na linha 2-4, sentido de 4 para 2:
( )
Fluxo na linha 3-4, sentido de 4 para 3:
( )
Limites de geração:
Limites dos cortes de carga:
Com base nas equações anteriores é possível determinar as matrizes do problema de
programação linear.
Vetor da função objetivo:
Matriz das restrições de igualdade:
[
( )
( ) ( )
] [
]
Matriz das restrições de desigualdade:
[
]
[
]
Os limites mínimo e máximo da geração bem como os limites dos cortes de carga
podem ser colocados da seguinte forma:

69
[
]
[
]
em que e representam, respectivamente, os limites inferiores e superiores das
variáveis dependentes do problema.
7. REFERÊNCIAS
[1] A. G. Novaes. Métodos de otimização: aplicação aos transportes, Edgar Blücher,
1978.
[2] J. P. Ignizio, T. M. Cavalier. Linear programming, Prentice-Hall, 1994.
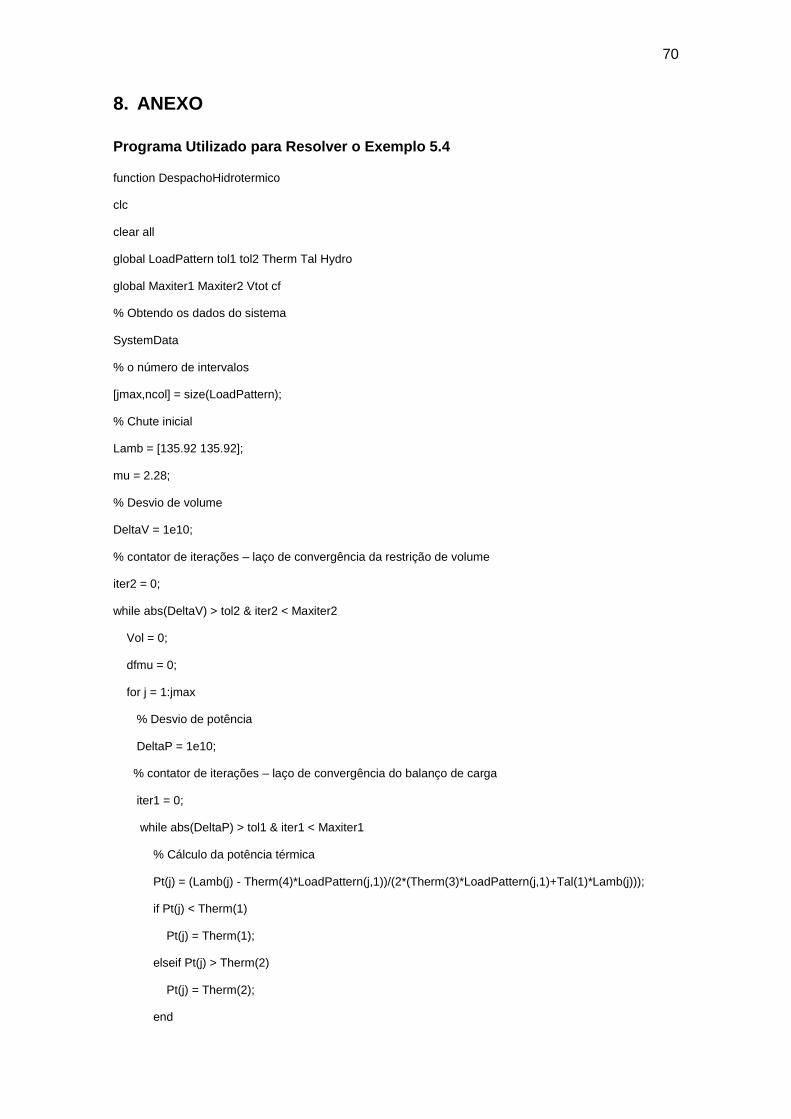
70
8. ANEXO
Programa Utilizado para Resolver o Exemplo 5.4
function DespachoHidrotermico
clc
clear all
global LoadPattern tol1 tol2 Therm Tal Hydro
global Maxiter1 Maxiter2 Vtot cf
% Obtendo os dados do sistema
SystemData
% o número de intervalos
[jmax,ncol] = size(LoadPattern);
% Chute inicial
Lamb = [135.92 135.92];
mu = 2.28;
% Desvio de volume
DeltaV = 1e10;
% contator de iterações – laço de convergência da restrição de volume
iter2 = 0;
while abs(DeltaV) > tol2 & iter2 < Maxiter2
Vol = 0;
dfmu = 0;
for j = 1:jmax
% Desvio de potência
DeltaP = 1e10;
% contator de iterações – laço de convergência do balanço de carga
iter1 = 0;
while abs(DeltaP) > tol1 & iter1 < Maxiter1
% Cálculo da potência térmica
Pt(j) = (Lamb(j) - Therm(4)*LoadPattern(j,1))/(2*(Therm(3)*LoadPattern(j,1)+Tal(1)*Lamb(j)));
if Pt(j) < Therm(1)
Pt(j) = Therm(1);
elseif Pt(j) > Therm(2)
Pt(j) = Therm(2);
end

71
% Cálculo da potência hidráulica
Ph(j) = (Lamb(j)-Hydro(3)*LoadPattern(j,1)*mu)/(2*Tal(2)*Lamb(j));
if Ph(j) < Hydro(1)
Ph(j) = Hydro(1);
elseif Ph(j) > Hydro(2)
Ph(j) = Hydro(2);
end
% Cálculo das perdas
Perdas = Tal(1)*Pt(j)^2 + Tal(2)*Ph(j)^2;
% Calculo do desvio de potência
DeltaP = LoadPattern(j,2)+Perdas - Pt(j) - Ph(j);
if abs(DeltaP) > tol1
% cálculo da derivada da função do desvio de potência
A = LoadPattern(j,1)*(Therm(3)+Therm(4)*Tal(1));
B = 2*(Therm(3)*LoadPattern(j,1)+Tal(1)*Lamb(j))^2;
C = Hydro(3)*LoadPattern(j,1)*mu*Tal(2);
D = 2*(Tal(2)*Lamb(j))^2;
dfLamb =-(A/B)-(C/D);
DeltaLamb = -DeltaP/dfLamb;
Lamb(j) = Lamb(j) + DeltaLamb;
iter1 = iter1 + 1;
end
end
% Cálculo da vazão em função da potência hidráulica
q(j) = Hydro(3)*Ph(j)+Hydro(4);
Vol = Vol + q(j)*LoadPattern(j,1);
% derivada da função do erro de volume
dfmu = dfmu + (Hydro(3)^2*LoadPattern(j,1))/(2*Tal(2)*Lamb(j));
end
% Cálculo do desvio de volume
DeltaV = Vtot - Vol;
if abs(DeltaV) > tol2
% projetar novo valor de mu
Deltamu = -DeltaV/(cf*dfmu);
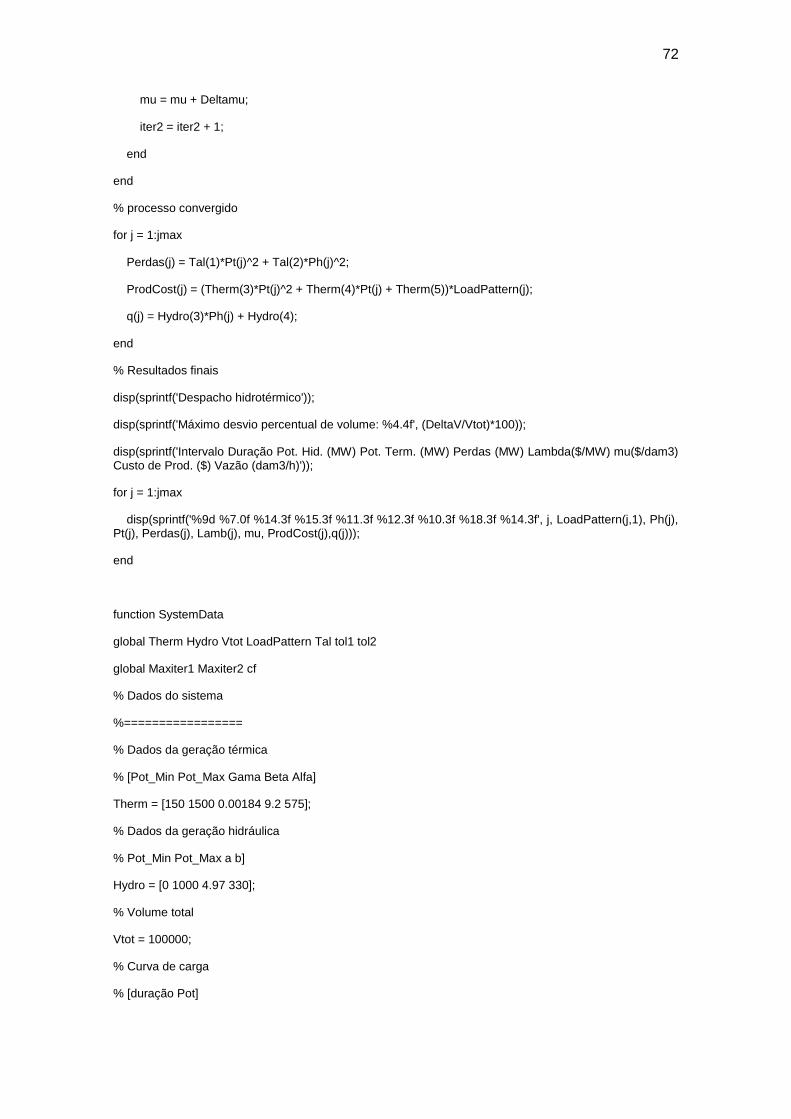
72
mu = mu + Deltamu;
iter2 = iter2 + 1;
end
end
% processo convergido
for j = 1:jmax
Perdas(j) = Tal(1)*Pt(j)^2 + Tal(2)*Ph(j)^2;
ProdCost(j) = (Therm(3)*Pt(j)^2 + Therm(4)*Pt(j) + Therm(5))*LoadPattern(j);
q(j) = Hydro(3)*Ph(j) + Hydro(4);
end
% Resultados finais
disp(sprintf('Despacho hidrotérmico'));
disp(sprintf('Máximo desvio percentual de volume: %4.4f', (DeltaV/Vtot)*100));
disp(sprintf('Intervalo Duração Pot. Hid. (MW) Pot. Term. (MW) Perdas (MW) Lambda($/MW) mu($/dam3) Custo de Prod. ($) Vazão (dam3/h)'));
for j = 1:jmax
disp(sprintf('%9d %7.0f %14.3f %15.3f %11.3f %12.3f %10.3f %18.3f %14.3f', j, LoadPattern(j,1), Ph(j), Pt(j), Perdas(j), Lamb(j), mu, ProdCost(j),q(j)));
end
function SystemData
global Therm Hydro Vtot LoadPattern Tal tol1 tol2
global Maxiter1 Maxiter2 cf
% Dados do sistema
%=================
% Dados da geração térmica
% [Pot_Min Pot_Max Gama Beta Alfa]
Therm = [150 1500 0.00184 9.2 575];
% Dados da geração hidráulica
% Pot_Min Pot_Max a b]
Hydro = [0 1000 4.97 330];
% Volume total
Vtot = 100000;
% Curva de carga
% [duração Pot]
73
LoadPattern = [12 1200;
12 1500];
% Perdas na transmissão
% [Tal_t Tal_h]
Tal = [0 8E-5];
% Tolerância para o balanço de geração
tol1 = 1E-3;
% Tolerância para a restrição de volume
tol2 = 5;
% número máximo de iterações - convergência do balanço de potência
Maxiter1 = 20000;
% número máximo de iterações - convergência da restrição de volume.
Maxiter2 = 2000;
% coeficiente para controle da convergência da restrição de volume.
cf = 5;

CAPÍTULO 2 - REPRESENTAÇÃO
DE CONTROLES E LIMITES NOS
PROGRAMAS DE FLUXO DE
POTÊNCIA
1. INTRODUÇÃO
Em um sistema de potência existem vários dispositivos de controle que influenciam
diretamente nas condições de operação e, portanto, devem ser incluídos na
modelagem do sistema, para que se possa simular corretamente seu desempenho.
Dessa forma, à formulação básica do problema de fluxo de potência devem ser
incorporadas as equações que representam esses dispositivos de controle, bem como
as inequações associadas aos limites de operação do sistema.
Entre os controles geralmente representados em programas de fluxo de potência
podem ser citados:
Controle de magnitude de tensão por injeção de reativo;
Controle de magnitude de tensão por ajuste de taps de transformadores;
Controle de fluxo de potência ativa;
Controle de intercâmbio entre áreas.
Dentre os limites operacionais, os mais comuns são:
Limites de injeção de potência reativa em barras PV;
Limites de tensão em barras PQ;
Limites de taps de transformadores;
Limites de fluxo de potência em linhas e transformadores.
As subseções seguintes detalham as representações das principais ações de controle,
bem como dos limites operacionais dos equipamentos componentes de um sistema de
potência.

75
2. MODOS DE REPRESENTAÇÃO
Os controles mencionados anteriormente podem ser representados nos programas de
fluxo de potência de três maneiras básicas:
Classificação por tipo de barra (V, PV, PQ, etc.) e o agrupamento das
equações correspondentes nos dos subsistemas 1 e 2 de resolução do
problema de fluxo de potência [1];
Mecanismos de ajustes executados alternadamente com a solução iterativa do
subsistema 1, ou seja, durante o cálculo de uma iteração as variáveis de
controle permanecem inalteradas e, entre uma iteração e outra, essas variáveis
são reajustadas objetivando que as variáveis controladas se aproximem cada
vez mais dos respectivos valores especificados;
Incorporação de equações e variáveis adicionais ao subsistema 1, ou
substituição de equações e variáveis dependentes desse subsistema por novas
equações e/ou variáveis.
Em relação ao processo de resolução das equações básicas do fluxo de potência, a
introdução da representação de controles automáticos traz algumas complicações
adicionais. A convergência do processo iterativo geralmente fica mais lenta. A
interferência entre controles que são eletricamente próximos pode levar, em algumas
situações, à não-convergência do processo iterativo. Adicionalmente, a ocorrência de
soluções múltiplas para um mesmo problema torna-se bastante frequente quando os
dispositivos de controle são incluídos na modelagem do sistema.
2.1 Ajustes Alternados
O processo de ajustes alternados, efetuados entre uma operação e outra durante a
resolução do subsistema 1, objetiva manter uma variável controlada z em valor
especificado zEsp, corrigindo-se convenientemente a variável de controle u:
( ) (2.1)
em que u é a correção na variável de controle; z é o erro na variável controlada
(valor especificado menos valor calculado); e a é a relação de sensibilidade entre as
variáveis u e z.
O esquema geral do procedimento de ajuste é mostrado a seguir:
a) Definir valores iniciais das variáveis de controle u = u0;

76
b) Obter uma solução inicial do subsistema 1 (soluções obtidas com uma
tolerância maior ou um número prefixado de iterações);
c) Estimar os valores atuais das variáveis controladas zCalc e verificar se os erros
z estão dentro das tolerâncias especificadas;
d) Verificar os erros de P e Q, se o processo estiver convergido parar, senão, ir
para o passo (e);
e) Determinar novos valores das variáveis de controle;
f) Realizar mais uma iteração no processo de resolução do subsistema 1 e
retornar ao passo (c).
A convergência desse processo iterativo depende tanto da evolução dos controles
quanto da resolução do subsistema 1. Em geral, são controles que determinam a
convergência do processo como um todo. É válido salientar que os efeitos dos
dispositivos de controle e os limites de operação só devem ser incorporados ao
processo iterativo após ter sido obtida uma convergência parcial na resolução do
subsistema 1. Desse modo, evita-se problemas como a atuação indevida de
dispositivos de controle e violações dos limites operacionais, causadas pela escolha
de valores iniciais muito distantes do ponto de operação.
2.2 Representação do Limite de Injeção de Reativo nas Barras
PV
Nas barras de geração e nas barras em que são ligados compensadores síncronos, o
controle de magnitude da tensão é feito pelo ajuste da corrente de campo das
máquinas síncronas, as quais podem operar sub ou sobrexcitadas, injetando ou
absorvendo reativo da rede.
Em programas de fluxo de potência, a representação do controle de tensão nas barras
PV está embutida na própria formulação básica do problema. As equações das
injeções de potência reativa Qk nas barras PV não aparecem no subsistema 1. Além
disso, a magnitude de tensão Vk é mantida em seu valor especificado VkEsp. O fato de
Qk não estar no subsistema 1 e de Vk ser constante implica que a matriz jacobiana não
contém as linhas relacionadas às derivadas e , e as colunas
correspondentes às derivadas e .
A atuação do mecanismo de controle de tensão em uma barra PV ocorre do modo que
se descreve a seguir. Considere uma barra PV na qual
e, inicialmente,
. Suponha que a cada iteração ocorra um aumento da potência
reativa necessária para manter a tensão no valor especificado até que o limite
seja atingindo. A partir desse ponto, a tensão tenderá a cair devido à
insuficiência de suporte de potência reativa. Raciocínio análogo é válido para o caso
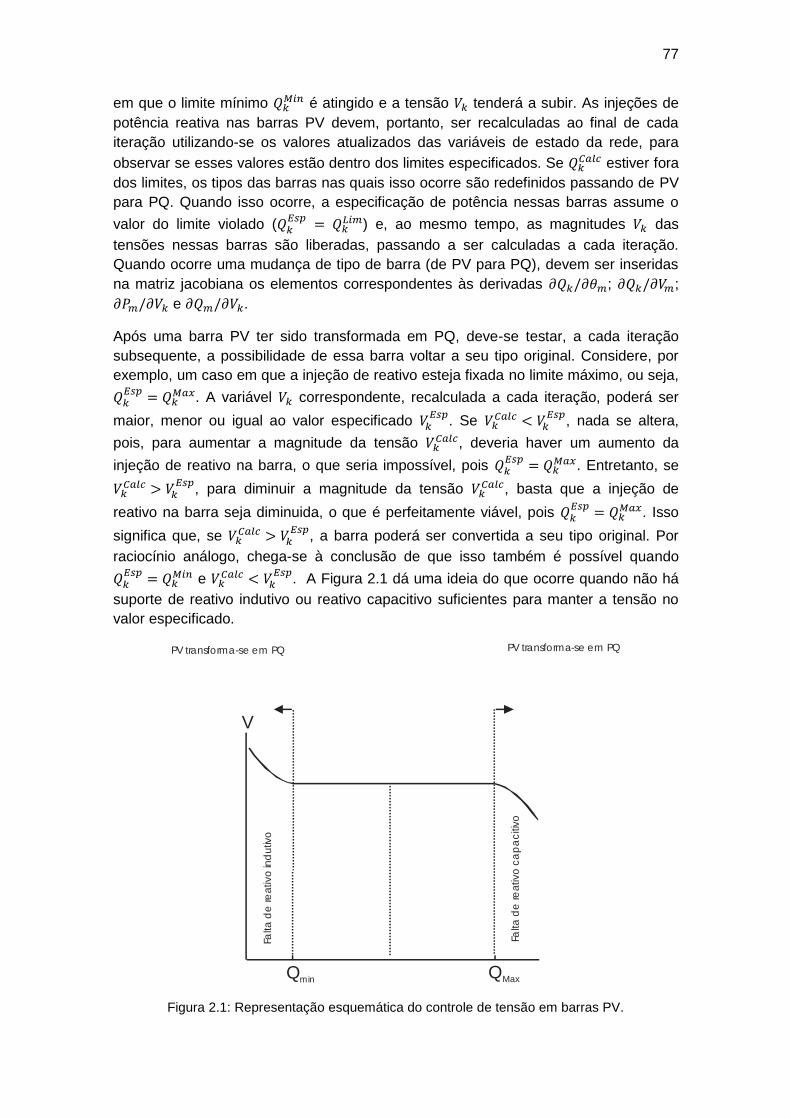
77
em que o limite mínimo é atingido e a tensão tenderá a subir. As injeções de
potência reativa nas barras PV devem, portanto, ser recalculadas ao final de cada
iteração utilizando-se os valores atualizados das variáveis de estado da rede, para
observar se esses valores estão dentro dos limites especificados. Se estiver fora
dos limites, os tipos das barras nas quais isso ocorre são redefinidos passando de PV
para PQ. Quando isso ocorre, a especificação de potência nessas barras assume o
valor do limite violado (
) e, ao mesmo tempo, as magnitudes das
tensões nessas barras são liberadas, passando a ser calculadas a cada iteração.
Quando ocorre uma mudança de tipo de barra (de PV para PQ), devem ser inseridas
na matriz jacobiana os elementos correspondentes às derivadas ; ;
e .
Após uma barra PV ter sido transformada em PQ, deve-se testar, a cada iteração
subsequente, a possibilidade de essa barra voltar a seu tipo original. Considere, por
exemplo, um caso em que a injeção de reativo esteja fixada no limite máximo, ou seja,
. A variável correspondente, recalculada a cada iteração, poderá ser
maior, menor ou igual ao valor especificado
. Se
, nada se altera,
pois, para aumentar a magnitude da tensão , deveria haver um aumento da
injeção de reativo na barra, o que seria impossível, pois
. Entretanto, se
, para diminuir a magnitude da tensão
, basta que a injeção de
reativo na barra seja diminuida, o que é perfeitamente viável, pois
. Isso
significa que, se
, a barra poderá ser convertida a seu tipo original. Por
raciocínio análogo, chega-se à conclusão de que isso também é possível quando
e
. A Figura 2.1 dá uma ideia do que ocorre quando não há
suporte de reativo indutivo ou reativo capacitivo suficientes para manter a tensão no
valor especificado.
Qmin QMax
V
PV transforma-se em PQPV transforma-se em PQ
Falta
de
re
ativo
ca
pa
citiv
o
Falta
de
re
ativo
ind
utiv
o
Figura 2.1: Representação esquemática do controle de tensão em barras PV.

78
2.3 Limites de Tensão em Barras PQ
Em alguns estudos de planejamento da operação e da expansão de sistemas de
potência é interessante que os programas de fluxo de potência limitem a variação da
magnitude das tensões das barras PQ dentro de uma faixa especificada mesmo que
nessas barras não existam realmente dispositivos de controle capazes de realizar tal
tarefa. Um exemplo de aplicação em que essa característica é desejável é o estudo de
expansão de longo prazo. Nesse tipo de estudo, determina-se, inicialmente, uma rede
de transmissão que atenda aos requisitos de geração/demanda, utilizando-se um
modelo simplificado da rede (e.g., fluxo de potência linearizado). Em uma fase
subsequente, avalia-se o perfil de tensão da rede, utilizando-se um programa de fluxo
de potência não-linear. Como a rede ainda não foi planejada para dar o suporte de
reativo necessário, é comum o surgimento de casos em que o processo iterativo não
converge. A limitação das magnitudes das tensões nas barras PQ dentro de uma faixa
especificada permite, em geral, que a convergência do processo seja atingida.
Adicionalmente, pode-se ter uma indicação de quais barras têm problemas de suporte
de potência reativa (barras em que a magnitude de tensão foi violada).
Em programas de fluxo de potência, as magnitudes das tensões das barras PQ são
recalculadas a cada iteração durante o processo de resolução do subsistema 1.
Quando o valor calculado de tensão cai fora dos limites
e , o tipo da
barra na qual ocorre a violação é redefinido, passando de PQ para PV, com a
magnitude da tensão especificada no limite violado (
). Ao mesmo tempo, a
injeção de potência reativa nessa barra é liberada, passando a ser calculada a cada
iteração.
Para ilustra como atua o mecanismo de limite de tensão nas barras PQ, considere um
caso em que a tensão seja especificada no valor mínimo, ou seja,
. Na
iteração que ocorre a fixação no limite, o valor calculado da injeção de reativo na barra
será
, em que é um valor positivo (correspondendo, por
exemplo, a um capacitor ligado à barra para imperdir que a magnitude da tensão caia
abaixo do mínimo permitido). Analogamente, quando a violação ocorre no limite
superior, ou seja,
, o incremento na injeção de reativo será negativo
(correspondendo, por exemplo, a um indutor ligado à barra para impedir que a
magnitude da tensão suba acima do máximo permitido).
Quando é fixado em um de seus valores limites, essa variável deve ser removida do
vetor das variáveis dependentes, equanto que a equação de resíduos
correspondente sai do subsistema 1. Devido à mudança no subsistema 1, quando
barras do tipo PQ se transformam em barras tipo PV, devem ser removidas da matriz
jacobiana as linhas correspondentes às derivadas e as colunas
correspondentes às derivadas e .
Após uma barra PQ ter sido transformada em PV, deve-se testar, a cada iteração
subsequente, a possibilidade de essa barra voltar a seu tipo original. Considere, por
exemplo, que a magnitude de tensão esteja fixada no limite mínimo, isto é,
. A variável
correspondente, recalculada a cada iteração, poderá ser maior,
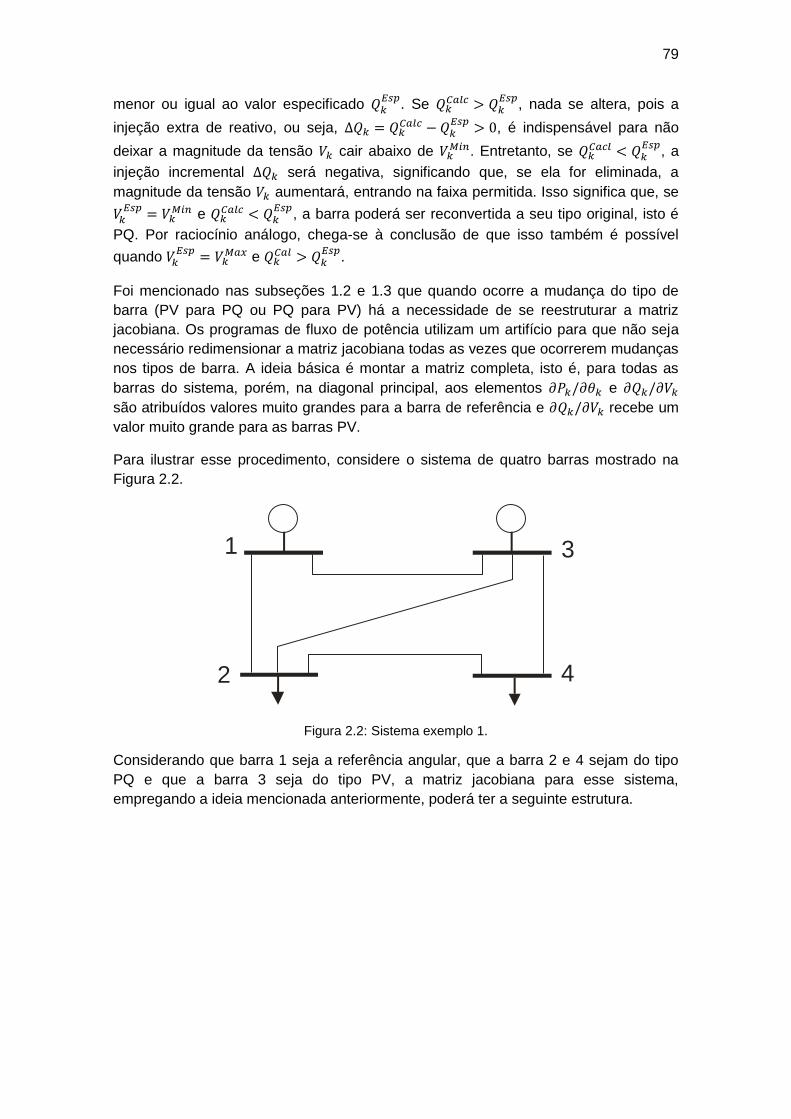
79
menor ou igual ao valor especificado
. Se
, nada se altera, pois a
injeção extra de reativo, ou seja,
, é indispensável para não
deixar a magnitude da tensão cair abaixo de . Entretanto, se
, a
injeção incremental será negativa, significando que, se ela for eliminada, a
magnitude da tensão aumentará, entrando na faixa permitida. Isso significa que, se
e
, a barra poderá ser reconvertida a seu tipo original, isto é
PQ. Por raciocínio análogo, chega-se à conclusão de que isso também é possível
quando
e
.
Foi mencionado nas subseções 1.2 e 1.3 que quando ocorre a mudança do tipo de
barra (PV para PQ ou PQ para PV) há a necessidade de se reestruturar a matriz
jacobiana. Os programas de fluxo de potência utilizam um artifício para que não seja
necessário redimensionar a matriz jacobiana todas as vezes que ocorrerem mudanças
nos tipos de barra. A ideia básica é montar a matriz completa, isto é, para todas as
barras do sistema, porém, na diagonal principal, aos elementos e
são atribuídos valores muito grandes para a barra de referência e recebe um
valor muito grande para as barras PV.
Para ilustrar esse procedimento, considere o sistema de quatro barras mostrado na
Figura 2.2.
1 3
42
Figura 2.2: Sistema exemplo 1.
Considerando que barra 1 seja a referência angular, que a barra 2 e 4 sejam do tipo
PQ e que a barra 3 seja do tipo PV, a matriz jacobiana para esse sistema,
empregando a ideia mencionada anteriormente, poderá ter a seguinte estrutura.

80
Tabela 2.1: Estrutura da matriz jacobiana.
1 2 4 3 V1 V2 V4 V3
V P1 0 0 0 0 0 0 0
PQ
P2 0
0
P4 0
0
PV P3 0
0
V Q1 0 0 0 0 0 0 0
PQ
Q2 0
0
Q4 0
0
PV Q3 0 0 0 0 0 0 0
2.4 Transformadores com Ajuste Automático de Tap
O controle da magnitude da tensão pode também ser efetuado por meio de
transformadores com controle automático de tap. A fim de avaliar o efeito da
representação dos transformadores com tap variável no processo iterativo de
resolução das equações do fluxo de potência, considere um transformador em fase,
representado na Figura 2.3, cuja relação de transformação deve ser variada para
controlar a magnitude da tensão .
Figura 2.3: Transformador em fase com controle automático de tap.
As equações que regem os fluxos de potência ativa e reativa em um transformador em
fase são dadas por:
( ) ( ) ( ) (2.2)
( ) ( ) ( ) (2.3)

81
A relação de sensibilidade mostrada em (2.4) pode ser utilizada na determinação da
correção da relação de transformação a ser introduzida na variável de controle
objetivando corrigir o erro.
(2.4)
sendo:
(2.5)
em que
é o valor especificado e é o valor calculado na iteração mais
recente. Se a barra k for pouco suscetível às variações da relação de transformação
, então, o fator de sensibilidade será aproximadamente unitário.
Um modo de representar o efeito da mudança automática de tap é utilizar o processo
de ajustes alternados. Outro modo é incluir o efeito da variação de tap no conjunto de
equações do subsistema 1. Para explicar como essa inclusão é feita, considere
novamente o transformador em fase apresentado na Figura 2.3, em que a variável de
controle regula a magnitude de tensão . A barra m passa a ser classificada
como sendo do tipo PQV, isto é, as variáveis Pm, Qm e Vm são especificadas. Com
isso, o subsistema 1é alterado. A variável Vm é substituída pela variável . Com
essa alteração, a matriz jacobiana passa a ter a seguinte forma geral:
[
] [
⁄
⁄ ⁄
⁄
⁄
⁄] [
]
(2.6)
em que NPQ é o número de barras PQ; NPV é o número de barras PV; NT é o número
de transformadores com controle automático de tap; e NPQV é o número de barras
PQV (a fim de facilitar a explicação, na Equação (2.6) foi considerado que todas as
barras PQV têm suas tensões reguladas por transformadores). Para uma melhor
compreensão da estrutura da matriz jacobiana, quando os transformadores com
controle automático de tap são representados diretamente nas equações do
subsistema 1, considere o sistema exemplo de 3 barras mostrado na Figura 2.4.
Suponha ainda que entre as barras 2 e 3 exista um transformador com controle
automático de tap e que a tensão na barra 3 seja controlada pela relação de
transformação . Considere que a barra 1 seja do tipo V; a barra 2 do tipo PV e a
barra 3 do tipo PQV (barra de carga com tensão controlada). Nesse caso, a tensão V3
é substituída pela relação de transformação e a matriz jacobiana para o sistema
exemplo é dada em (2.7).
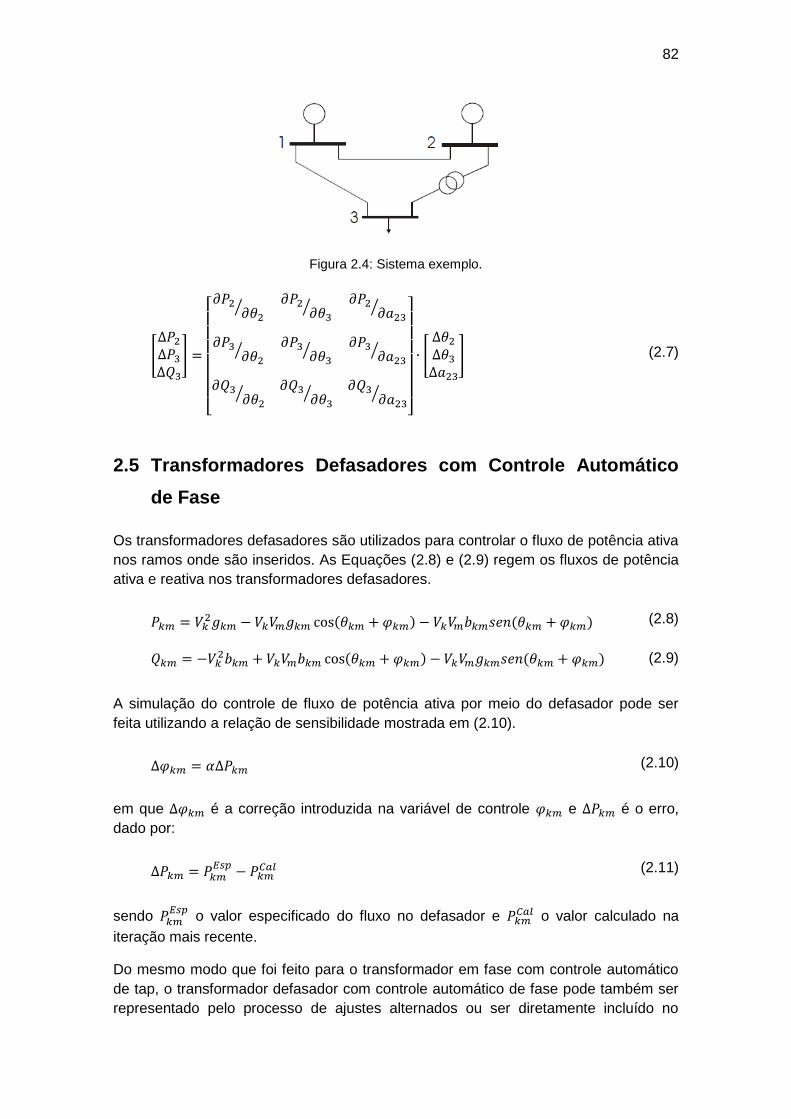
82
Figura 2.4: Sistema exemplo.
[
]
[
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄]
[
] (2.7)
2.5 Transformadores Defasadores com Controle Automático
de Fase
Os transformadores defasadores são utilizados para controlar o fluxo de potência ativa
nos ramos onde são inseridos. As Equações (2.8) e (2.9) regem os fluxos de potência
ativa e reativa nos transformadores defasadores.
( ) ( ) (2.8)
( ) ( ) (2.9)
A simulação do controle de fluxo de potência ativa por meio do defasador pode ser
feita utilizando a relação de sensibilidade mostrada em (2.10).
(2.10)
em que é a correção introduzida na variável de controle e é o erro,
dado por:
(2.11)
sendo
o valor especificado do fluxo no defasador e o valor calculado na
iteração mais recente.
Do mesmo modo que foi feito para o transformador em fase com controle automático
de tap, o transformador defasador com controle automático de fase pode também ser
representado pelo processo de ajustes alternados ou ser diretamente incluído no

83
conjunto de equações do subsistema 1. Sendo assim, para cada defasador são
incluídas uma nova equação (
) e uma nova variável dependente
( ). Em (2.12) é apresentada a estrutura da matriz jacobiana quando os
transformadores defasadores são incluídos na modelagem.
[
]
[
⁄ ⁄
⁄
⁄
⁄ ⁄
⁄
⁄ ⁄
]
[
]
(2.12)
em que ND é o número de defasadores; é o vetor de resíduos cujos componentes
são
; e é o vetor das correções nos ângulos de controle .
Para uma melhor compreensão da estrutura da matriz jacobiana para o caso em que
as equações que representam os transformadores com regulagem automática do
ângulo de fase são consideradas diretamente no conjunto de equações do subsistema
1, o sistema exemplo da Figura 2.4 será utilizado novamente. Considere agora que o
elemento que interliga as barras 2 e 3 seja um transformador defasador puro. (i.e.
). Nesse caso, o intuito é controlar o fluxo entre as barras 2 e 3, atuando sobre
o ângulo de fase do transformador. Considere novamente que a barra 1 seja do
tipo V, a barra 2 do tipo PV e a barra 3 do tipo PQ. Observe que agora a matriz
jacobiana terá uma linha e uma coluna a mais, correspondentes à variável e à
equação de fluxo ativo entre as barras 2 e 3 (
). A matriz jacobiana
para essa situação é mostrada em (2.13).
[
]
[
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
]
[
] (2.13)
2.6 Controle de Intercâmbio entre Áreas
Em uma rede interligada é necessário que sejam controlados os intercâmbios de
potência ativa entre as várias áreas que compõem o sistema. Em uma rede com NA
áreas são controlados os intercâmbios de NA – 1 áreas, pois o intercâmbio de uma
delas fica definido pelas demais.
O intercâmbio líquido de potência ativa de uma área é definido como a soma algébrica
dos fluxos nas linhas e transformadores que interligam essa área com as demais (as
exportações são consideradas positivas e as importações negativas). A cada área do
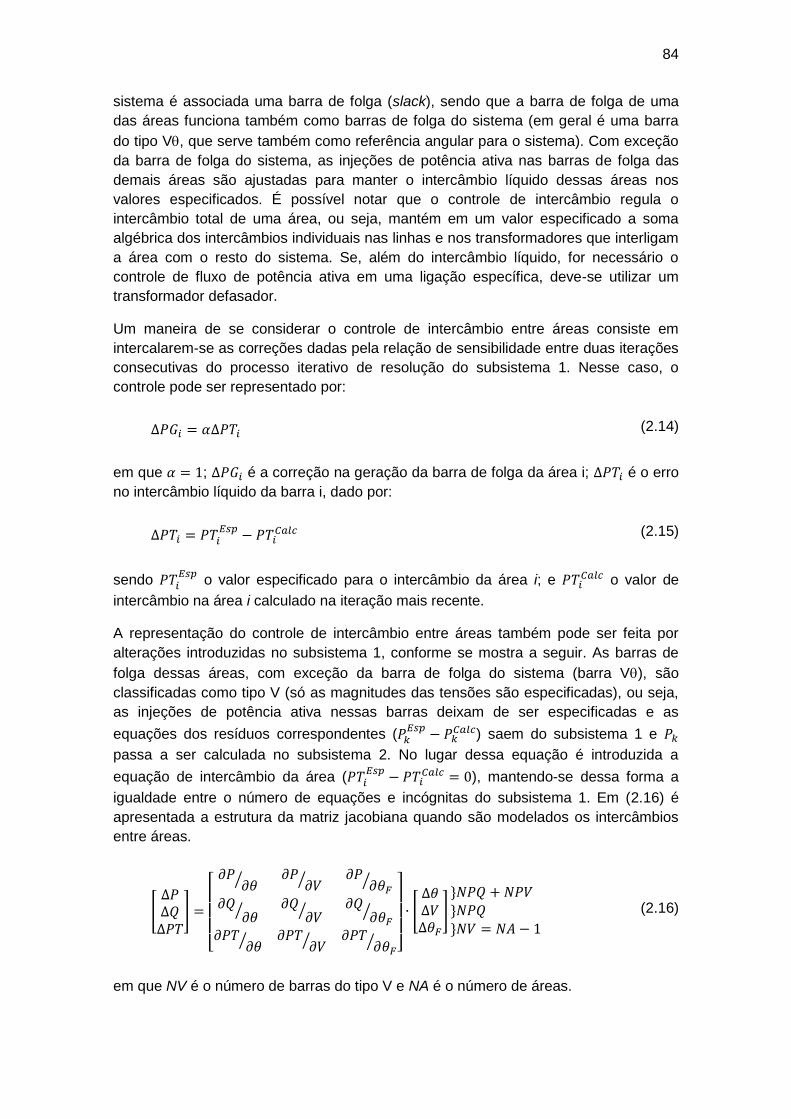
84
sistema é associada uma barra de folga (slack), sendo que a barra de folga de uma
das áreas funciona também como barras de folga do sistema (em geral é uma barra
do tipo V, que serve também como referência angular para o sistema). Com exceção
da barra de folga do sistema, as injeções de potência ativa nas barras de folga das
demais áreas são ajustadas para manter o intercâmbio líquido dessas áreas nos
valores especificados. É possível notar que o controle de intercâmbio regula o
intercâmbio total de uma área, ou seja, mantém em um valor especificado a soma
algébrica dos intercâmbios individuais nas linhas e nos transformadores que interligam
a área com o resto do sistema. Se, além do intercâmbio líquido, for necessário o
controle de fluxo de potência ativa em uma ligação específica, deve-se utilizar um
transformador defasador.
Um maneira de se considerar o controle de intercâmbio entre áreas consiste em
intercalarem-se as correções dadas pela relação de sensibilidade entre duas iterações
consecutivas do processo iterativo de resolução do subsistema 1. Nesse caso, o
controle pode ser representado por:
(2.14)
em que ; é a correção na geração da barra de folga da área i; é o erro
no intercâmbio líquido da barra i, dado por:
(2.15)
sendo
o valor especificado para o intercâmbio da área i; e o valor de
intercâmbio na área i calculado na iteração mais recente.
A representação do controle de intercâmbio entre áreas também pode ser feita por
alterações introduzidas no subsistema 1, conforme se mostra a seguir. As barras de
folga dessas áreas, com exceção da barra de folga do sistema (barra V), são
classificadas como tipo V (só as magnitudes das tensões são especificadas), ou seja,
as injeções de potência ativa nessas barras deixam de ser especificadas e as
equações dos resíduos correspondentes (
) saem do subsistema 1 e
passa a ser calculada no subsistema 2. No lugar dessa equação é introduzida a
equação de intercâmbio da área (
), mantendo-se dessa forma a
igualdade entre o número de equações e incógnitas do subsistema 1. Em (2.16) é
apresentada a estrutura da matriz jacobiana quando são modelados os intercâmbios
entre áreas.
[
]
[
⁄ ⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄ ]
[
]
(2.16)
em que NV é o número de barras do tipo V e NA é o número de áreas.
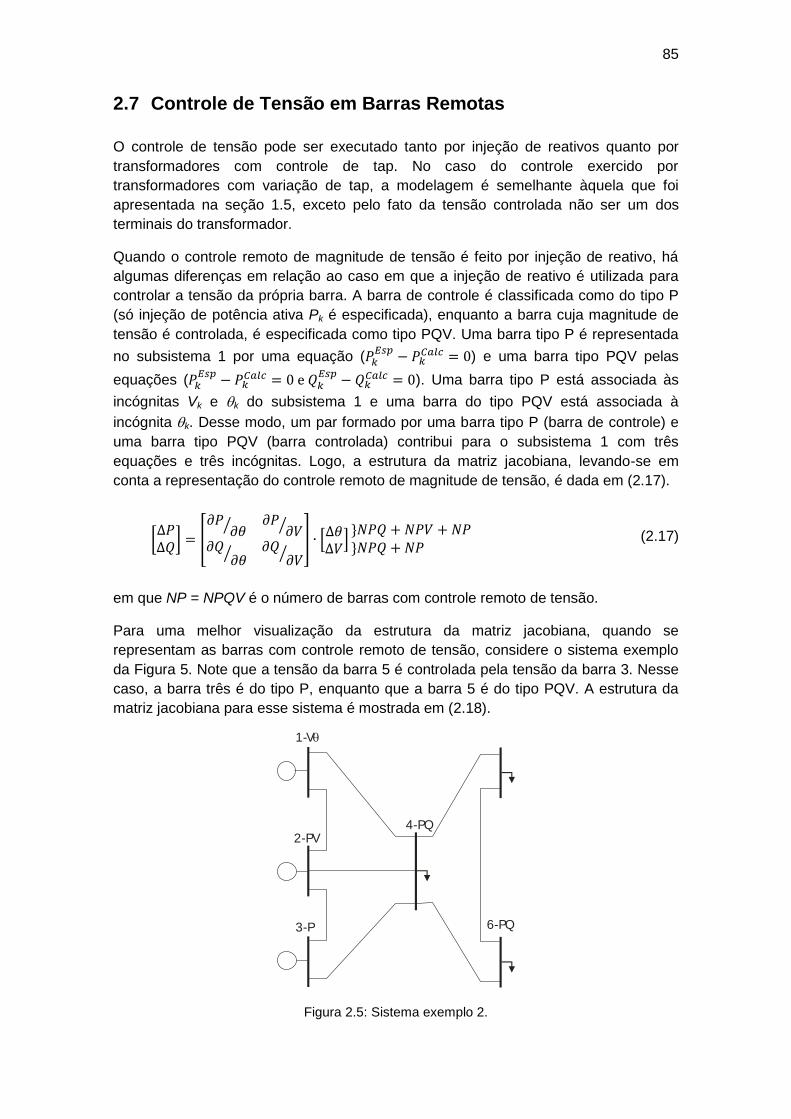
85
2.7 Controle de Tensão em Barras Remotas
O controle de tensão pode ser executado tanto por injeção de reativos quanto por
transformadores com controle de tap. No caso do controle exercido por
transformadores com variação de tap, a modelagem é semelhante àquela que foi
apresentada na seção 1.5, exceto pelo fato da tensão controlada não ser um dos
terminais do transformador.
Quando o controle remoto de magnitude de tensão é feito por injeção de reativo, há
algumas diferenças em relação ao caso em que a injeção de reativo é utilizada para
controlar a tensão da própria barra. A barra de controle é classificada como do tipo P
(só injeção de potência ativa Pk é especificada), enquanto a barra cuja magnitude de
tensão é controlada, é especificada como tipo PQV. Uma barra tipo P é representada
no subsistema 1 por uma equação (
) e uma barra tipo PQV pelas
equações (
). Uma barra tipo P está associada às
incógnitas Vk e k do subsistema 1 e uma barra do tipo PQV está associada à
incógnita k. Desse modo, um par formado por uma barra tipo P (barra de controle) e
uma barra tipo PQV (barra controlada) contribui para o subsistema 1 com três
equações e três incógnitas. Logo, a estrutura da matriz jacobiana, levando-se em
conta a representação do controle remoto de magnitude de tensão, é dada em (2.17).
[
] [
⁄
⁄
⁄
⁄] [
]
(2.17)
em que NP = NPQV é o número de barras com controle remoto de tensão.
Para uma melhor visualização da estrutura da matriz jacobiana, quando se
representam as barras com controle remoto de tensão, considere o sistema exemplo
da Figura 5. Note que a tensão da barra 5 é controlada pela tensão da barra 3. Nesse
caso, a barra três é do tipo P, enquanto que a barra 5 é do tipo PQV. A estrutura da
matriz jacobiana para esse sistema é mostrada em (2.18).
1-V
2-PV
3-P
4-PQ
6-PQ
Figura 2.5: Sistema exemplo 2.

86
[
]
[
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄ ]
[
]
(2.18)
3. REFERÊNCIAS
[1] Monticelli, A. Fluxo de Carga em Redes de Energia Elétrica. São Paulo: Edgard
Blücher, 1983.
CAPÍTULO 3 - ESTIMAÇÃO DE
ESTADOS EM SISTEMAS
ELÉTRICOS DE POTÊNCIA
1. INTRODUÇÃO
Nas últimas décadas, a filosofia para a operação de sistemas de potência tem se
caracterizado pela incorporação de funções que visam à avaliação em tempo real da
segurança do sistema. A implantação e coordenação destas funções são realizadas
em modernos Centros de Operação de Sistemas (COS), sendo essa uma tendência
crescente na maioria das empresas de energia elétrica. Mais recentemente, a
desregulamentação do setor elétrico e o estabelecimento de um mercado “spot” de
energia fizeram com que a operação de equipamentos e linhas de transmissão se
aproximasse perigosamente de seus limites operativos. Adicionalmente, na última
década, a quase ausência de investimentos relevantes em obras de expansão dos
sistemas de transmissão fizeram aumentar ainda mais a importância dos COS no
cumprimento de suas funções.
A avaliação automática de segurança da operação de um sistema elétrico é feita a
partir da execução básica de duas funções que são: Monitoração de Segurança e
Análise de Segurança. O desempenho destas funções depende da disponibilidade de
informações confiáveis a respeito do ponto de operação atual do sistema. Essa função
é executada pelo Estimador de Estados em Sistemas de Potência (EESEP) [1].
O estimador de estados é constituído de um conjunto de algoritmos que processam
telemedidas que são fornecidas pelo sistema supervisório de controle e de aquisição
de dados (SCADA – Supervisory Control and Data Aquisition) instalado no sistema. As
telemedidas são, em geral, redundantes e corrompidas por erros de medição, que têm
diversas origens, dentre as quais podem ser citadas a conversão analógico-digital da
grandeza elétrica e a transmissão dos dados até os COS.
As grandezas elétricas monitoradas são processadas pelo estimador com o objetivo
de fornecer estimativas confiáveis para os estados da rede. Estes últimos
correspondem às tensões (módulo e ângulo) nas barras do sistema elétrico e,
adicionalmente, posição de taps de transformadores e ângulo de disparo de tiristores
existentes nos conversores de elos em corrente contínua.
A principal expectativa é de que as estimativas obtidas para todas as grandezas
elétricas sejam mais confiáveis do que as mesmas grandezas medidas. Basicamente,
a forma de obtenção dos estados da rede elétrica é que diferencia a qualidade dos
resultados obtidos por meio do estimador de estados e do fluxo de potência.
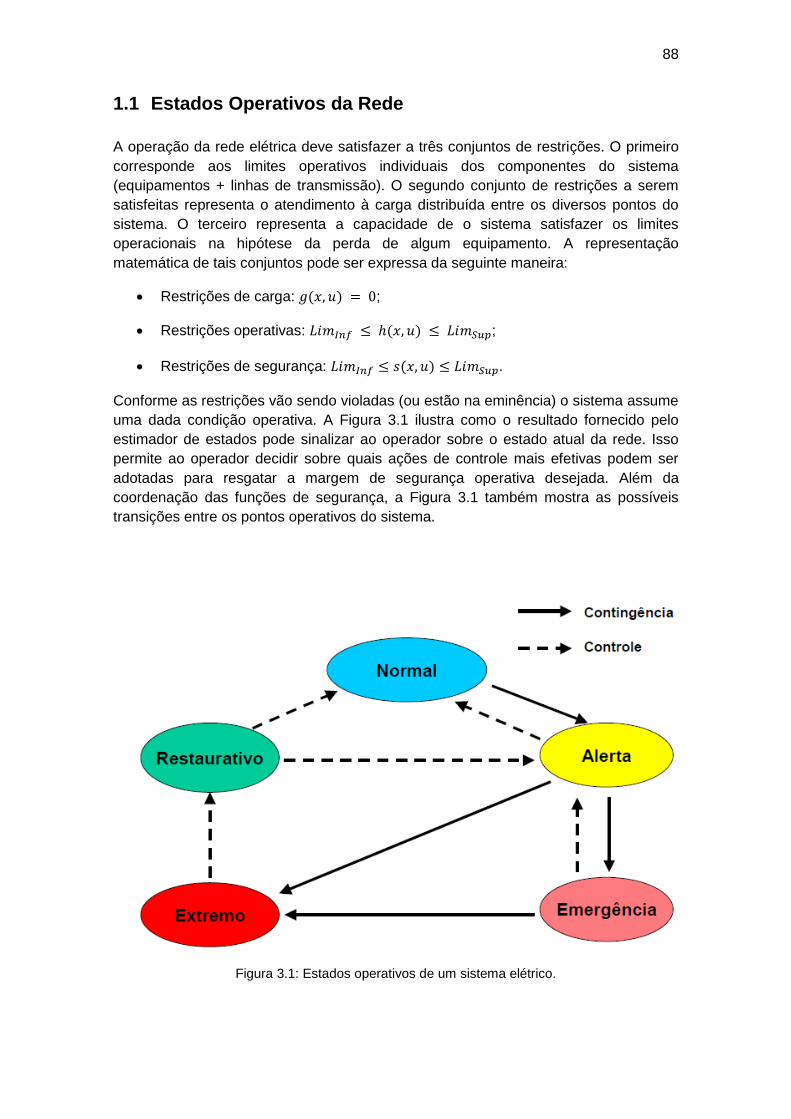
88
1.1 Estados Operativos da Rede
A operação da rede elétrica deve satisfazer a três conjuntos de restrições. O primeiro
corresponde aos limites operativos individuais dos componentes do sistema
(equipamentos + linhas de transmissão). O segundo conjunto de restrições a serem
satisfeitas representa o atendimento à carga distribuída entre os diversos pontos do
sistema. O terceiro representa a capacidade de o sistema satisfazer os limites
operacionais na hipótese da perda de algum equipamento. A representação
matemática de tais conjuntos pode ser expressa da seguinte maneira:
Restrições de carga: ( ) ;
Restrições operativas: ( ) ;
Restrições de segurança: ( ) .
Conforme as restrições vão sendo violadas (ou estão na eminência) o sistema assume
uma dada condição operativa. A Figura 3.1 ilustra como o resultado fornecido pelo
estimador de estados pode sinalizar ao operador sobre o estado atual da rede. Isso
permite ao operador decidir sobre quais ações de controle mais efetivas podem ser
adotadas para resgatar a margem de segurança operativa desejada. Além da
coordenação das funções de segurança, a Figura 3.1 também mostra as possíveis
transições entre os pontos operativos do sistema.
Figura 3.1: Estados operativos de um sistema elétrico.

89
A definição de cada um dos estados operativos do sistema é apresentada a seguir:
Normal: Neste estado tanto as restrições de carga quanto de operação e segurança
são atendidas. Em outras palavras, o sistema é capaz de atender a toda a demanda
sem violar os limites de operação. A observância das restrições de segurança significa
que nenhuma contingência prevista é capaz de levar o sistema ao estado de
emergência. Entretanto, a ocorrência de uma contingência imprevista (considerada
impossível) poderá levar o sistema para o estado de emergência.
Alerta: Neste estado são obedecidas apenas as restrições de carga e operação. Nem
todas as restrições de segurança são obedecidas. De modo semelhante ao estado
normal, o sistema é capaz de atender todas as cargas sem violar nenhum limite
operacional. A não observância das restrições de segurança significa que a ocorrência
de pelo menos uma das contingências previstas poderá levar o sistema a uma
situação de emergência.
Emergência: Esse estado é caracterizado pela violação das restrições de operação. A
emergência pode ser provocada por uma contingência e consequente desligamento de
um ou mais componentes do sistema (linhas, geradores, transformadores, etc.). A
eliminação da emergência pode ser feita com a passagem do sistema para o estado
de alerta ou, então, pelo desligamento de partes do sistema (e.g.: cargas), o que
levaria o sistema para o estado restaurativo.
Restaurativo: Esse estado é alcançado quando uma emergência é eliminada por
desligamento manual ou automático de parte do sistema, efetuado pelo centro de
controle ou por dispositivos locais. As restrições operacionais são obedecidas, mas o
sistema não é capaz de atender a todas as cargas.
Extremo: Nesse caso, mesmo sem a ocorrência de uma das contingências previstas,
o sistema já se encontra em uma situação na qual há violação de limites operativos
e/ou partes do sistema estão desligadas (e.g. cargas não atendidas).
A ocorrência de qualquer tipo de distúrbio na rede, ou seja, uma contingência de maior
ou menor severidade pode fazer o ponto operativo da rede se deslocar para uma das
condições operativas descritas na figura anterior, isto é: alerta, emergência, extremo
ou restaurativo. A partir dessa sinalização, o operador executa as ações de controle
necessárias para restabelecer a normalidade operativa da rede.
2. MODERNOS CENTROS DE OPERÇÃO DE SISTEMAS
Essa seção tem por objetivo fazer uma apresentação sucinta das principais funções
executadas nos centros de operação em tempo real.
2.1 Centro de Operação de Sistemas - COS
A Figura 3.2 apresenta a sequência de funções executadas num Centro de Operação
de Sistemas (COS). As funções realizadas no COS objetivam assegurar a
normalidade operativa da malha principal do sistema de transmissão.
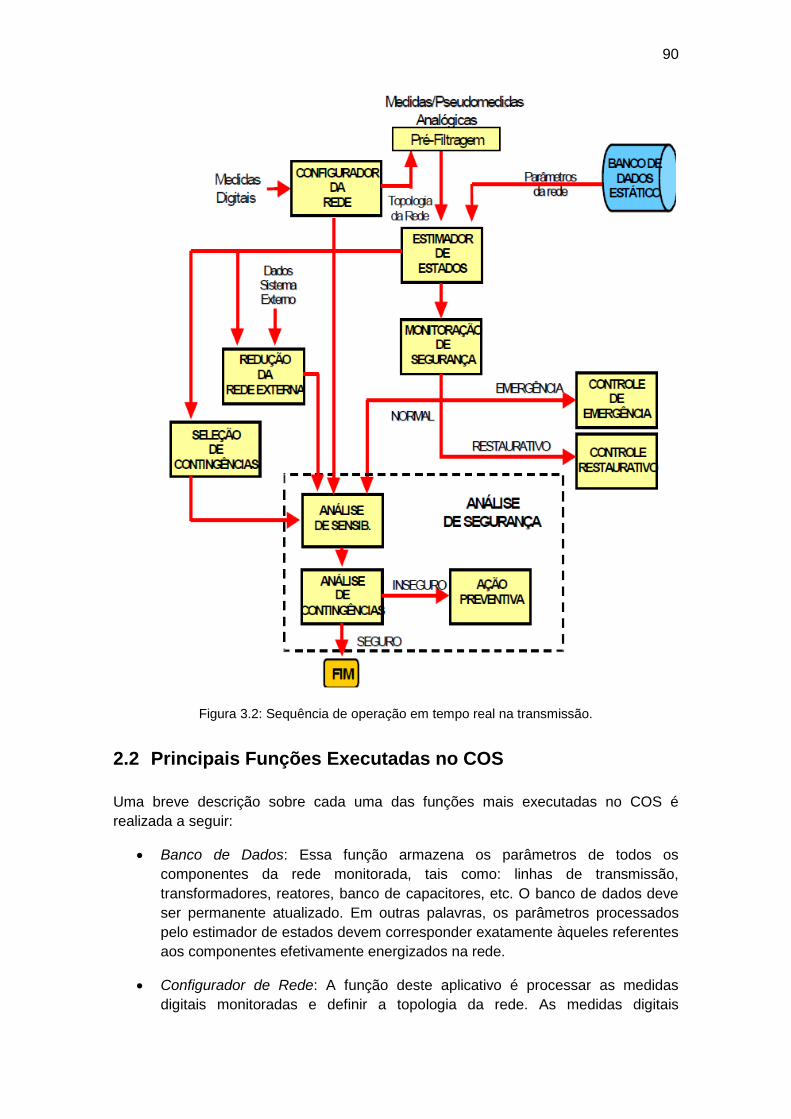
90
Figura 3.2: Sequência de operação em tempo real na transmissão.
2.2 Principais Funções Executadas no COS
Uma breve descrição sobre cada uma das funções mais executadas no COS é
realizada a seguir:
Banco de Dados: Essa função armazena os parâmetros de todos os
componentes da rede monitorada, tais como: linhas de transmissão,
transformadores, reatores, banco de capacitores, etc. O banco de dados deve
ser permanente atualizado. Em outras palavras, os parâmetros processados
pelo estimador de estados devem corresponder exatamente àqueles referentes
aos componentes efetivamente energizados na rede.
Configurador de Rede: A função deste aplicativo é processar as medidas
digitais monitoradas e definir a topologia da rede. As medidas digitais

91
processadas correspondem aos estados operativos de chaves e disjuntores,
por exemplo, 0 para aberto e 1 para fechado.
Pré-filtragem: Essa função objetiva excluir informações que violam
grosseiramente as hipóteses concebidas no modelo de medição do estimador
de estados. Geralmente, erros do tipo topológicos, que são causados por
falhas relativas à sinalização da condição operativa de chaves e disjuntores,
são detectados e eliminados nesta fase.
Estimador de Estados: Essa função tem por objetivo principal monitorar a
segurança operativa da rede elétrica. Ela é o escopo do presente documento.
Manutenção da Segurança Operativa: Por meio da análise dos resultados
fornecidos pelo estimador de estados, é possível verificar se o estado operativo
atual da rede é normal, alerta, emergencial, extremo ou restaurativo. A partir
dessa verificação, conforme for o caso, permite-se adotar as medidas de
controle necessárias para restabelecer a normalidade operativa da rede.
Análise de Sensibilidade: Essa função permite identificar dentre os controles
disponíveis, quais são os mais efetivos no restabelecimento da normalidade
operativa da rede. Os índices de sensibilidade são bastante úteis nos ajustes
de fluxo de potência face à indisponibilidade de elementos da rede (N – 1). A
partir do ponto operativo definido nesses estudos, dá-se o início aos estudos
de transitórios eletromecânicos frente ao elenco das contingências mais críticas
que podem ocorrer no sistema.
Análise de Contingências: Essa função utiliza as ferramentas de cálculo de
fluxo de carga e transitórios eletromecânicos. Tais estudos permitem planejar a
expansão da rede e subsidiar a manutenção quanto à solicitação de
desligamento de componentes do sistema.
Ações de Controle: A execução das funções descritas anteriormente, mesmo
que parcial, permite realizar as ações de controle necessárias à manutenção
da segurança operativa da rede ou restabelecer a sua normalidade.
Outras Funções: Não menos importantes que as funções descritas
anteriormente, com base nos resultados do estimador de estados, que
armazenado num banco de dados representa o histórico da operação, pode-se
realizar as seguintes funções adicionais:
minimização de perdas;
despacho ótimo da geração;
avaliação da capacidade máxima de transferência de potência, etc.
2.3 Centro de Operação de Distribuição - COD
A Figura 3.3 apresenta a sequência de funções executadas num Centro de Operação
de Distribuição (COD). As funções realizadas no COD objetivam assegurar o
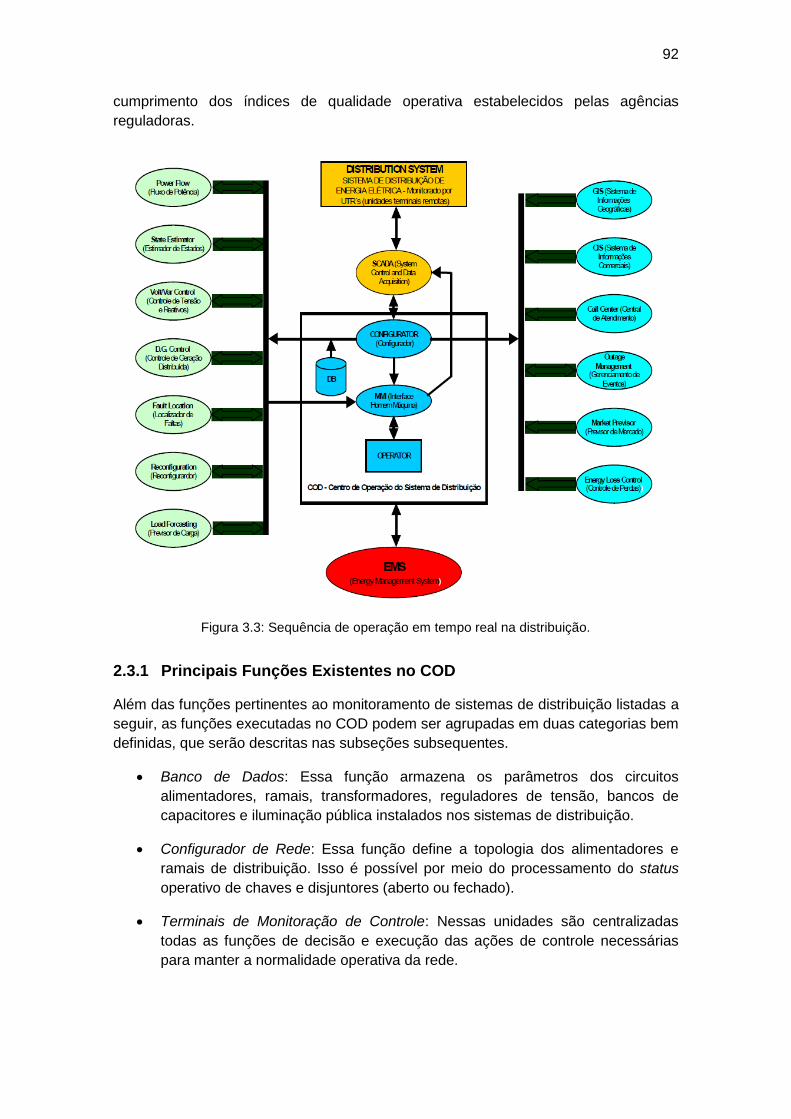
92
cumprimento dos índices de qualidade operativa estabelecidos pelas agências
reguladoras.
Figura 3.3: Sequência de operação em tempo real na distribuição.
2.3.1 Principais Funções Existentes no COD
Além das funções pertinentes ao monitoramento de sistemas de distribuição listadas a
seguir, as funções executadas no COD podem ser agrupadas em duas categorias bem
definidas, que serão descritas nas subseções subsequentes.
Banco de Dados: Essa função armazena os parâmetros dos circuitos
alimentadores, ramais, transformadores, reguladores de tensão, bancos de
capacitores e iluminação pública instalados nos sistemas de distribuição.
Configurador de Rede: Essa função define a topologia dos alimentadores e
ramais de distribuição. Isso é possível por meio do processamento do status
operativo de chaves e disjuntores (aberto ou fechado).
Terminais de Monitoração de Controle: Nessas unidades são centralizadas
todas as funções de decisão e execução das ações de controle necessárias
para manter a normalidade operativa da rede.

93
2.3.2 Funções Técnicas
As principais funções técnicas executadas no COS estão listadas à esquerda na
Figura 3.2 e podem ser descritas da seguinte maneira:
Fluxo de Potência: Diante da perspectiva de conexão ao sistema de
distribuição de produtores independentes de energia, a ferramenta de fluxo de
potência é usada em substituição aos aplicativos que calculam meramente a
queda de tensão em circuitos alimentadores e ramais de distribuição. Para
essa aplicação são necessários algoritmos mais adequados, tais como a
obtenção da solução de um fluxo de carga por meio do método de injeção de
corrente e/ou modelos mais realistas, como a representação “abc” ou fluxo de
carga trifásico.
Estimadores de Estados: A carência de informações por algum tempo inibiu a
utilização de estimadores de estados em sistemas de distribuição. No entanto,
o desenvolvimento, implantação e aplicação de modernos sistemas de
comunicação via cabos de fibras óticas em serviços de telefonia, TV a cabo e
internet, atém da disponibilidade de uma nova geração de medidores de
energia dotados de hardware com protocolos de comunicação tipo TCP/IP,
permitem resolver o problema da necessária redundância de informação.
Controle de Tensão e Reativos: Essa função só pode ser exercida
eficientemente à medida que o sistema de monitoramento e automação de
sistemas de distribuição seja implantado.
Controle de Geração Distribuída: A tendência crescente de produtores
independentes se conectarem às redes de distribuição deve ser regulamenta e
rigorosamente controlada pela concessionária.
Localizador de Faltas: Essa função objetiva isolar o circuito defeituoso, repará-
lo e reconectá-lo ao sistema rapidamente, para não violar os índices de
qualidade, tipo: DEC, FEC, DIC, FIC, entre outros em estudo, que são
estabelecidos pela agência reguladora dos serviços.
Reconfigurador de Redes: Essa função auxilia a recomposição do sistema
após a ocorrência de alguma falha na rede.
Previsor de Carga: Essa função aplicada à distribuição, num horizonte de longo
prazo, objetiva principalmente estabelecer uma correlação geográfica auxiliar
no planejamento da expansão de sistemas de distribuição. No curto prazo,
auxilia a execução da função de reconfigurar a rede com o intuito de evitar
sobrecargas em elementos integrantes do sistema de distribuição (por
exemplo, transformadores).
2.3.3 Funções Gerenciais e Comerciais
Sistema de Informações Geográficas: Essa função gerencia o cadastro da rede
de distribuição. O cadastramento da rede de distribuição é geo-referenciado e,
preferencialmente, prioriza informações sobre a localização do poste,
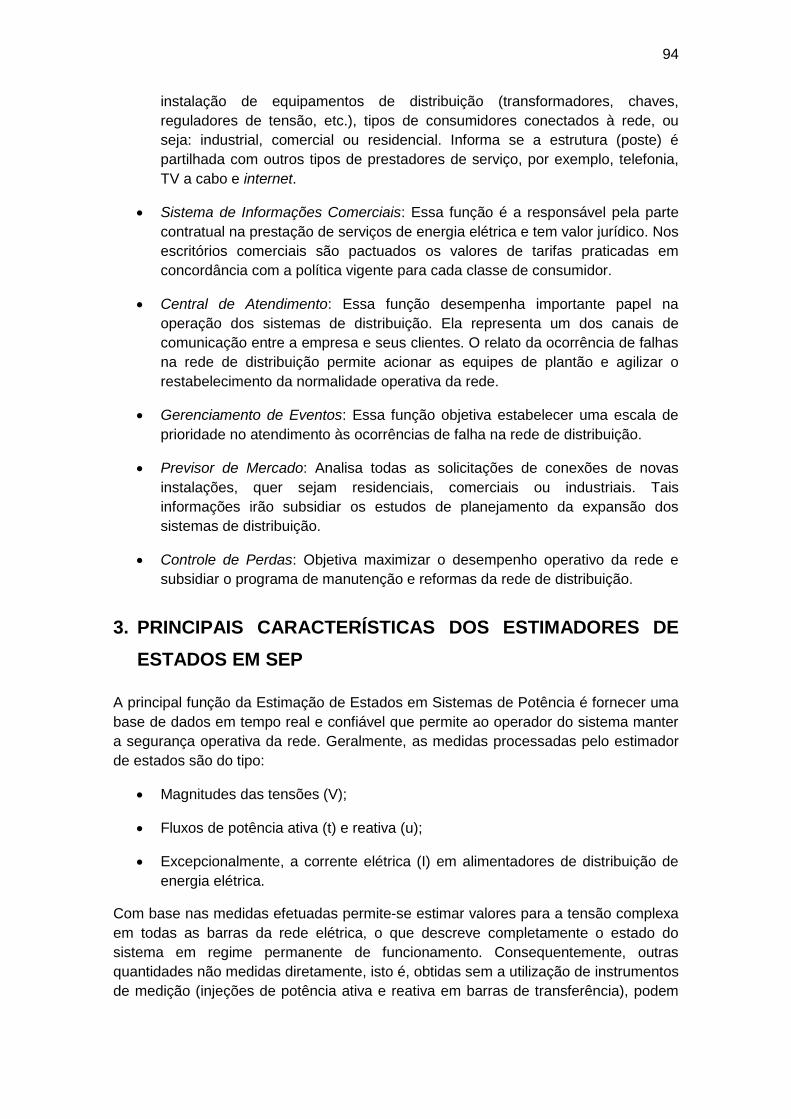
94
instalação de equipamentos de distribuição (transformadores, chaves,
reguladores de tensão, etc.), tipos de consumidores conectados à rede, ou
seja: industrial, comercial ou residencial. Informa se a estrutura (poste) é
partilhada com outros tipos de prestadores de serviço, por exemplo, telefonia,
TV a cabo e internet.
Sistema de Informações Comerciais: Essa função é a responsável pela parte
contratual na prestação de serviços de energia elétrica e tem valor jurídico. Nos
escritórios comerciais são pactuados os valores de tarifas praticadas em
concordância com a política vigente para cada classe de consumidor.
Central de Atendimento: Essa função desempenha importante papel na
operação dos sistemas de distribuição. Ela representa um dos canais de
comunicação entre a empresa e seus clientes. O relato da ocorrência de falhas
na rede de distribuição permite acionar as equipes de plantão e agilizar o
restabelecimento da normalidade operativa da rede.
Gerenciamento de Eventos: Essa função objetiva estabelecer uma escala de
prioridade no atendimento às ocorrências de falha na rede de distribuição.
Previsor de Mercado: Analisa todas as solicitações de conexões de novas
instalações, quer sejam residenciais, comerciais ou industriais. Tais
informações irão subsidiar os estudos de planejamento da expansão dos
sistemas de distribuição.
Controle de Perdas: Objetiva maximizar o desempenho operativo da rede e
subsidiar o programa de manutenção e reformas da rede de distribuição.
3. PRINCIPAIS CARACTERÍSTICAS DOS ESTIMADORES DE
ESTADOS EM SEP
A principal função da Estimação de Estados em Sistemas de Potência é fornecer uma
base de dados em tempo real e confiável que permite ao operador do sistema manter
a segurança operativa da rede. Geralmente, as medidas processadas pelo estimador
de estados são do tipo:
Magnitudes das tensões (V);
Fluxos de potência ativa (t) e reativa (u);
Excepcionalmente, a corrente elétrica (I) em alimentadores de distribuição de
energia elétrica.
Com base nas medidas efetuadas permite-se estimar valores para a tensão complexa
em todas as barras da rede elétrica, o que descreve completamente o estado do
sistema em regime permanente de funcionamento. Consequentemente, outras
quantidades não medidas diretamente, isto é, obtidas sem a utilização de instrumentos
de medição (injeções de potência ativa e reativa em barras de transferência), podem

95
ser estimadas e representam informações igualmente relevantes, capazes de revelar a
margem de segurança operativa do sistema.
4. APLICAÇÃO DOS RESULTADOS DA ESTIMAÇÃO DE
ESTADOS EM SEP
Dentre as principais aplicações dos resultados fornecidos pelo estimador de estados,
destacam-se:
Monitoração de Segurança, cujo objetivo é observar a condição operativa do
sistema e verificar se esta é normal, de alerta, de emergência, ou restaurativa;
Análise de Segurança, cuja primeira função é determinar os efeitos de
eventuais contingências na rede (defeitos, i.e., desligamento de
transformadores e linhas de transmissão);
Previsão de Carga;
Despacho Ótimo da Geração;
Planejamento da Manutenção.
5. CLASSIFICAÇÃO DOS ESTIMADORES DE ESTADOS
Quanto ao modo de processar as telemedidas, os estimadores de estados podem ser
classificados em [2]-[4]:
Estimadores tipo “batch”, no qual o conjunto de grandezas medidas é
processado simultaneamente;
Estimadores tipo sequenciais, no qual as grandezas medidas são processadas
individualmente, isto é, uma por vez.
Os estimadores do tipo “batch”, quanto à formulação matemática, podem ainda ser
classificados em:
Estimadores baseados no método de Mínimos Quadrados Ponderados (MQP);
Estimadores baseados no método de Mínimo Valor Absoluto [5].
Os estimadores baseados no método MQP, quanto ao algoritmo de solução, podem
ser classificados em:
Solução via Equação Normal de Gauss (Método Clássico) [1];
Solução via Métodos Ortogonais (Golub, Rotações de Givens) [6]-[7];
Solução via Métodos Híbridos [8];
Solução via Métodos da Matriz Aumentada (Hactel’s Method) [9];
96
Solução via Método Desacoplado Rápido [10].
6. MÍNIMOS QUADRADOS PONDERADOS (MQP) –
ABORDAGEM CLÁSSICA
A formulação clássica do problema de mínimos quadrados ponderados foi
pioneiramente proposta por Gauss em 1795. A apresentação da referida formulação é
feita com auxílio da Figura 3.4, mostrada a seguir. Nessa figura estão indicadas as
coordenadas (xi, yi) no espaço R2 que representam o conjunto F de observações feitas
sobre um dado experimento, isto é:
( ) ( ) ( ) (3.1)
em que o parâmetro xi, geralmente, representa o instante em que a observação yi é
feita.
Com base nas observações realizadas, o problema de fazer estimativas ou previsões
num instante pode ser contornado por meio da abordagem clássica de encontrar
uma função y = f(x) que melhor se ajuste aos pares ordenados (xi,yi) em F, de tal
forma que o experimento possa ser estimado em qualquer instante não observado ,
cujo resultado pode ser avaliado pela função ( ).
Figura 3.4: Representação do problema de regressão linear.
A equação da função do exemplo mostrado na figura anterior é do tipo f(x) = ax + b.
Portanto, o problema se resume em determinar os coeficientes a e b da equação da

97
reta que melhor se ajusta aos pares ordenados (xi, yi) em F, para que a soma dos
quadrados das distâncias verticais, isto é, dos erros ε1, ε2,..., εm, seja mínima. A
distância de (xi, yi) à reta f(x) = ax + b pode ser conhecida pela expressão:
| ( ) | | | (3.2)
Então, o problema pode ser resolvido pela minimização da função quadrática do erro,
objetivando determinar os coeficientes a e b da equação da reta que resulta no menor
valor da função objetivo:
∑ ∑( )
(3.3)
Uma das primeiras técnicas de cálculo do valor mínimo de uma função consiste em
determinar a solução do sistema de equações descrito abaixo:
{
∑ ( )
∑( )
∑ ( )
∑( )
(3.4)
Agrupando os termos semelhantes no sistema de equações acima, obtém-se:
{
(∑
) (∑
) ∑( )
(∑
) (∑
) ∑
(3.5)
O conjunto de equações mostradas em (3.5) pode ser posto na seguinte forma
matricial:
[
] [
] [ ] (3.6)
A solução do sistema de equações anterior pode ser obtida pelo método da Equação
Normal de Gauss, ou seja:
( ) (3.7)
Sendo,

98
(3.8)
Finalmente, deve-se observar que a soma total dos quadrados dos erros ou resíduos
(r) pode ser conhecida a partir da seguinte expressão:
∑ ∑( )
( ) ( )
(3.9)
Exemplo:
A administração de uma empresa deseja fazer o seu planejamento financeiro anual
com base no seguinte histórico de vendas, expressas em milhões de Reais:
Ano 1 2 3 4 5
Vendas Realizadas 23 27 30 34 ?
Valores Estimados
Qual a expectativa de vendas para o quinto ano?
Solução:
Uma maneira de solucionar o problema proposto é pela minimização da função
quadrática dos resíduos que, em outras palavras, representa a determinação dos
coeficientes da equação da reta que melhor se ajustas às observações realizadas nos
últimos quatro anos. Sendo assim, pode-se escrever:
[
] [
] [ ]
Efetuando os cálculos:
[
] [
]
A solução desejada é:
[
]
O que permite definir a seguinte equação de reta:
( )
Finalmente, o valor estimado para as vendas no quinto ano é: 37,5 milhões de reais.

99
Com base na função obtida, pode-se determinar a soma ponderada dos quadrados
dos resíduos (SPQR), que representa a norma Euclidiana (norma 2) do vetor de erros,
ou seja:
Ano 1 2 3 4
Vendas Realizadas 23 27 30 34
Valores Estimados 23,1 26,7 30,3 33,9
-0,1 0,3 -0,3 0,1
0,01 0,09 0,09 0,01
Logo:
∑
Este índice representa a soma dos quadrados dos erros de cada estimativa ( )
cometidos no processo de estimação das grandezas desejadas. Usualmente, o índice
SPQR é utilizado em bases estatísticas para inferir a existência (detecção) de
observações errôneas.
No exemplo anterior, os erros cometidos nas observações realizadas são ponderados
igualmente, i.e., recebem uma ponderação unitária. No caso das observações feitas
por instrumentos que possuem classes de precisão diferentes, é razoável supor que
as medidas mais precisas devem influir mais nas estimativas do que aquelas de menor
confiança. Uma forma de modelar matematicamente esse fato é ponderar os erros
cometidos ( ) pelo valor correspondente do desvio-padrão ( ) do medidor. Sendo
assim, define-se a matriz de convariâncias dos erros de medição como sendo:
[
]
A introdução da matriz R nas Equações (3.7-3.9) transformam estas últimas em:
( ) (3.10)
(3.11)
∑(
)
( ) ( )
(3.12)

100
7. ESTIMADOR DE ESTADOS LINEARIZADO (DC)
7.1 Considerações Iniciais
Embora seja de pouco interesse para aplicação prática, o estimador de estados
linearizado é importante como ferramenta auxiliar no aprendizado dos métodos e
técnicas ligados à estimação de estados em sistemas de potência. As hipóteses
simplificadoras em que se baseia, embora limitem bastante a abrangência e validade
de seus resultados, permitem a simplificação para uma forma não iterativa que facilita
o entendimento dos diversos métodos de solução da estimação de estados. Além
disso, o estimador linearizado é útil na interpretação de técnicas de processamento de
erros grosseiros, de análise de observabilidade, etc.
7.2 Hipóteses Simplificadoras
O estimador de estados linearizado baseia-se nas mesmas hipóteses simplificadoras
utilizadas para o chamado “fluxo de potência DC”, ou seja:
1 As magnitudes de tensão nas barras do sistema de potência são todas
consideradas iguais a 1.0 pu;
2 As resistências e susceptâncias shunts das linhas de transmissão são supostas
desprezíveis;
3 As aberturas angulares das linhas são supostas pequenas o suficiente para
justificar a aproximação:
( ) ( ) (3.13)
Considerando-se as hipóteses acima, as relações entre os fluxos e injeções de
potência ativa com os ângulos das tensões nas barras são dadas por:
( ) (3.14)
e
∑
(3.15)
sendo
(3.16)
Na Equação (3.15) o termo representa o conjunto de barras adjacentes à barra i.

101
7.3 Estrutura de Dados do Estimador DC
7.3.1 Vetor de Grandezas Medidas
O vetor de medidas z envolve apenas medidas de fluxo e de injeção de potência ativa,
ou seja:
[ ]
Como as magnitudes das tensões nas barras são supostas constantes, as únicas
variáveis a serem estimadas são os ângulos das tensões, ou seja, o vetor de estados
reduz-se ao estado angular da rede, . Assim, tomando-se a barra 1 como barra de
referência, a estrutura do problema reduz-se a:
(3.17)
e
(3.18)
em que N é o número de barras do sistema, é o vetor de medidas de fluxo de
potência ativa e é o vetor de injeção de potência ativa.
7.3.2 Exemplos
As figuras mostradas a seguir exemplificam a estrutura que as matrizes de observação
(H) e o ganho (G) assumem quando o estimador de estados linearizado (Estimador
DC) é aplicado aos sistemas IEEE-14, 30 e 118 barras.
Figura 3.5: Estrutura das matrizes H e G para o sistema IEEE-14

102
Figura 3.6: Estrutura das matrizes H e G para o sistema IEEE-30.
Figura 3.7: Estrutura das matrizes H e G para o sistema IEEE-118.

103
7.4 Modelo de Medição Linearizado
O modelo de medição para o estimador de estados simplificado é dado por:
(3.19)
(3.20)
em que m é o número total de medidas. É importante se observar que, segundo as
Equações (3.13) e (3.14), as relações entre as quantidades medidas e os estados são
lineares. Consequentemente, a matriz de observação H do modelo de medição
expresso em (3.19) é constante. Além disso, ainda com base nas Equações (3.13) e
(3.14), verifica-se que os elementos H são combinações lineares das susceptâncias
dos ramos (linhas de transmissão e transformadores) da rede.
7.5 Solução do Estimador de Estados DC
As características do modelo de medição linearizado permitem que as estimativas
para os estados sejam obtidas de forma não-iterativa. Utilizando-se, por exemplo, o
método da equação normal, as estimativas para os estados podem ser calculadas
resolvendo-se o sistema linear:
( ) (3.21)
7.5.1 Construção do Modelo Linear de Medição
Considere o sistema com quatro barras e o plano de medição mostrado na Figura 3.8.
Figura 3.8: Sistema exemplo para construção do modelo linear de medição.
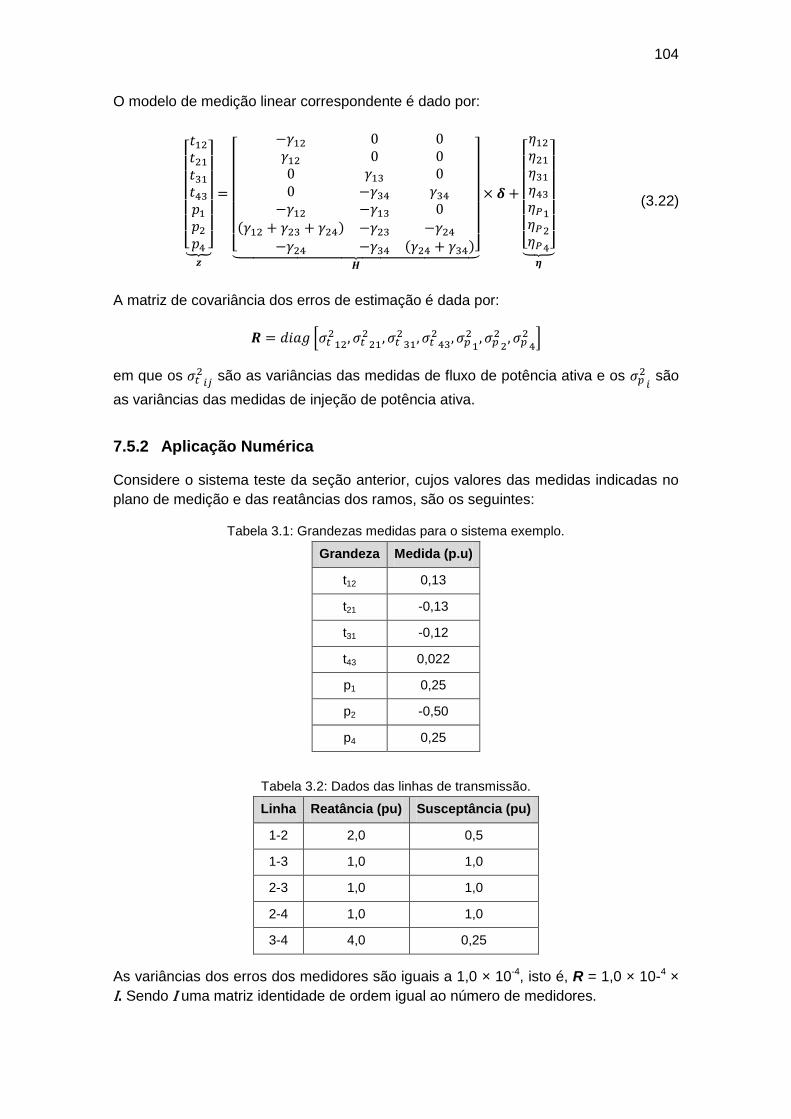
104
O modelo de medição linear correspondente é dado por:
[
]
⏟
[
( )
( )]
⏟
[
]
⏟
(3.22)
A matriz de covariância dos erros de estimação é dada por:
[
]
em que os
são as variâncias das medidas de fluxo de potência ativa e os são
as variâncias das medidas de injeção de potência ativa.
7.5.2 Aplicação Numérica
Considere o sistema teste da seção anterior, cujos valores das medidas indicadas no
plano de medição e das reatâncias dos ramos, são os seguintes:
Tabela 3.1: Grandezas medidas para o sistema exemplo.
Grandeza Medida (p.u)
t12 0,13
t21 -0,13
t31 -0,12
t43 0,022
p1 0,25
p2 -0,50
p4 0,25
Tabela 3.2: Dados das linhas de transmissão.
Linha Reatância (pu) Susceptância (pu)
1-2 2,0 0,5
1-3 1,0 1,0
2-3 1,0 1,0
2-4 1,0 1,0
3-4 4,0 0,25
As variâncias dos erros dos medidores são iguais a 1,0 × 10-4, isto é, R = 1,0 × 10-4 ×
I. Sendo I uma matriz identidade de ordem igual ao número de medidores.

105
Solução:
O problema proposto é resolvido pela solução do sistema de equações algébrico-
lineares expresso na Equação (3.21), isto é,
( ) ⏟
( )⏟
A matriz de informação (H) é obtida substituindo-se os valores correspondentes de
susceptâncias dos ramos. Então, pela Equação (3.22), obtém-se:
[
]
A matriz de covariâncias correspondente é:
[
]
A matriz G e o vetor são dados, respectivamente, por:
[
]
[
]
Logo a estimativa dos ângulos das tensões das barras é:
[
]
O vetor de grandezas estimadas é dado por:
[
]
[
]
O vetor de resíduos pode, então, ser obtido por:
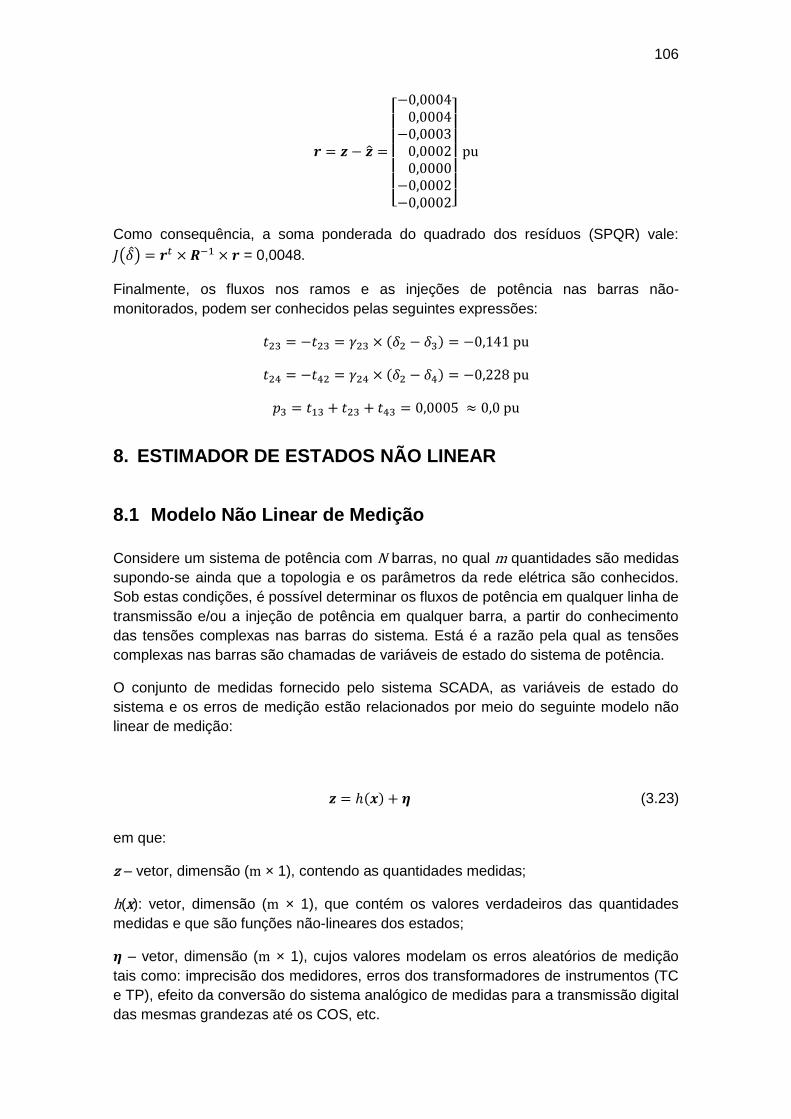
106
[
]
Como consequência, a soma ponderada do quadrado dos resíduos (SPQR) vale:
( ) = 0,0048.
Finalmente, os fluxos nos ramos e as injeções de potência nas barras não-
monitorados, podem ser conhecidos pelas seguintes expressões:
( )
( )
8. ESTIMADOR DE ESTADOS NÃO LINEAR
8.1 Modelo Não Linear de Medição
Considere um sistema de potência com N barras, no qual m quantidades são medidas
supondo-se ainda que a topologia e os parâmetros da rede elétrica são conhecidos.
Sob estas condições, é possível determinar os fluxos de potência em qualquer linha de
transmissão e/ou a injeção de potência em qualquer barra, a partir do conhecimento
das tensões complexas nas barras do sistema. Está é a razão pela qual as tensões
complexas nas barras são chamadas de variáveis de estado do sistema de potência.
O conjunto de medidas fornecido pelo sistema SCADA, as variáveis de estado do
sistema e os erros de medição estão relacionados por meio do seguinte modelo não
linear de medição:
( ) (3.23)
em que:
z – vetor, dimensão (m × 1), contendo as quantidades medidas;
h(x): vetor, dimensão (m × 1), que contém os valores verdadeiros das quantidades
medidas e que são funções não-lineares dos estados;
– vetor, dimensão (m × 1), cujos valores modelam os erros aleatórios de medição
tais como: imprecisão dos medidores, erros dos transformadores de instrumentos (TC
e TP), efeito da conversão do sistema analógico de medidas para a transmissão digital
das mesmas grandezas até os COS, etc.

107
A suposição de que tem média zero e que os erros de medição são não
correlacionados, isto é, a matriz de covariância dos erros de medição é diagonal,
permite estabelecer as seguintes igualdades:
( ) ( )
[
]
(3.24)
em que: representa a variância dos erros de medição dos medidores.
8.2 Solução do Método MQP Aplicado ao Problema de
Estimação de Estados em SEP
Considerando o método MQP apresentado nas seções anteriores, tem-se que o vetor
de estimativa dos estados em sistemas de potência é calculado de forma análoga ao
que já foi apresentado anteriormente, isto é, o problema a ser resolvido consiste em
minimizar a função custo referente ao modelo de medição já mostrado em relação ao
vetor de estados estimados , ou seja:
( ) ( ) ( ) (3.25)
‖ ( )‖ ‖ ‖
Portanto, deseja-se minimizar o índice representado pelo somatório do quadrado dos
resíduos, sendo que cada resíduo é ponderado pelo desvio-padrão do medidor. A
utilização da matriz de ponderação R implica que as medidas supostamente mais
precisas recebem maior peso que aquelas nas quais se espera maior imprecisão.
Apesar de a minimização da função custo apresentada não envolver restrição, o
processo de busca da solução ótima representa um problema não linear cuja solução
não é trivial. Por outro lado, o índice SPQR a ser otimizado é representado por uma
função quadrática, que é expressa em termos do vetor de equações não lineares ( ).
Vários métodos podem ser aplicados na solução desse problema, no entanto, a
natureza quadrática da função custo e a ausência de restrições deste problema de
otimização torna-o bastante apropriado para ser resolvido pelo método de Newton.
8.3 O método de Gauss-Newton
Essa técnica consiste em obter a solução do problema não linear por meio de um
algoritmo iterativo, que consiste em promover correções no vetor de estados tal como:
(3.26)
As correções são obtidas pela expansão da função ( ) em série de Taylor, em
torno de um ponto próximo à solução, até o termo de segunda ordem, isto é:

108
( ) ( ) ( )
|
(
( )
)|
(3.27)
ou seja,
( ) ( ) ( )
( ) (3.28)
em que:
( )
|
( )
( ) ( ( )
)|
( )
O mínimo da função ( ) com relação a é obtido diferenciando-se ( ) em
relação a e igualando a zero. Fazendo isto, obtém-se:
( ) ( )
( ) (3.29)
O que resulta em:
( ) ( ) (3.30)
A obtenção do vetor gradiente ( ) em termos analíticos é mais bem compreendida
expressando-se inicialmente a função custo por meio da seguinte equação:
( )
em que – ( ). Sendo assim, a derivada primeira desta última função em
relação a é dado por:
( ) ( )
|
(
)
( ( )
)|
(3.31)
ou ainda:
( ( )
)
( ) | (3.32)
ou seja:
( ) ( ) (3.33)

109
Supondo-se ainda que próximo à solução seja valido assumir que:
( )
( ) (3.34)
e
( ) ( ) ( ) (3.35)
Agora é possível escrever que:
( ) ( ) (3.36)
isto é:
( ) ( ) (3.37)
ou ainda,
( ) (3.38)
em que:
( ) ( ) ( )
( )
A Equação normal de Gauss apresentada acima é resolvida iterativamente objetivando
obter estimativas cada vez melhores para os estados da rede até que o critério de
convergência pré-estabelecido seja satisfeito. Um critério de convergência do
processo iterativo usualmente utilizado é:
| | (3.39)
8.4 Estrutura de Dados do Estimador CA
8.4.1 Vetor de Grandezas Medidas
O vetor que armazena as quantidades medidas é organizado da seguinte maneira:
[ ]
(3.40)

110
A razão pela qual o vetor de medidas z tem a estrutura acima não é única. A principal
motivação é a disposição assumida pelos elementos na matriz de coeficientes do
sistema de equações lineares resultantes do problema de Estimação de Estado em
Sistemas de Potência. A estruturação de dados adotada favorece a fatoração da
matriz (modelo clássico), ou ainda, da matriz (solução via métodos ortogonais),
pois diminui o número de “fill in” (enchimentos) durante o processo de fatoração das
matrizes referidas anteriormente.
8.4.2 Estrutura da Matriz Jacobiana ( )
A estrutura de dados que a matriz jacobiana ( ) assume face à estratégia adotada
para facilitar sua fatoração pode ser apresentada de forma simbólica, tal como:
( )
[
]
(3.41)
As equações a partir das quais são obtidos todos os elementos da matriz jacobiana
são derivadas das equações apresentadas nos itens subsequentes.
8.4.3 Equações de Injeção de Potência
∑ ( )
(3.42)
∑ ( )
(3.43)

111
8.4.4 Equações de Fluxo de Potência
( ) (3.44)
( ) (3.45)
(
) ( ) (3.46)
(
) ( ) (3.47)
sendo que nas equações anteriores, tem-se:
susceptância shunt do modelo da linha de transmissão;
susceptância do ramo série do modelo da linha de transmissão;
ângulo interno da admitância do ramo considerado.
8.4.5 Cálculo dos Elementos da Matriz Jacobiana H(x)
Medidas de Tensão
, para quaisquer valores de i e j;
, para i j;
, para .
As relações estabelecidas entre as medidas de tensão e os estados angulares e
magnitudes das tensões nodais da rede, conforme as expressões acima, têm a
seguinte consequência na estrutura da matriz H:
0 0 0 1 0 0 0
0 0 0 0 1 0
0
0 0 0 0 0 0 1
em que representa o número de medidas de tensão existente no plano de medição
considerado.

112
Medidas de Fluxo de Potência
{
{
( )
( )
( )
( )
{
( )
( )
( )
( )
{
{
( )
( )
( )
(
) ( )
{
( )
( )
(
) ( )
( )
Medidas de Injeção de Potência
{
( )
∑ ( )
( )
∑ ( )
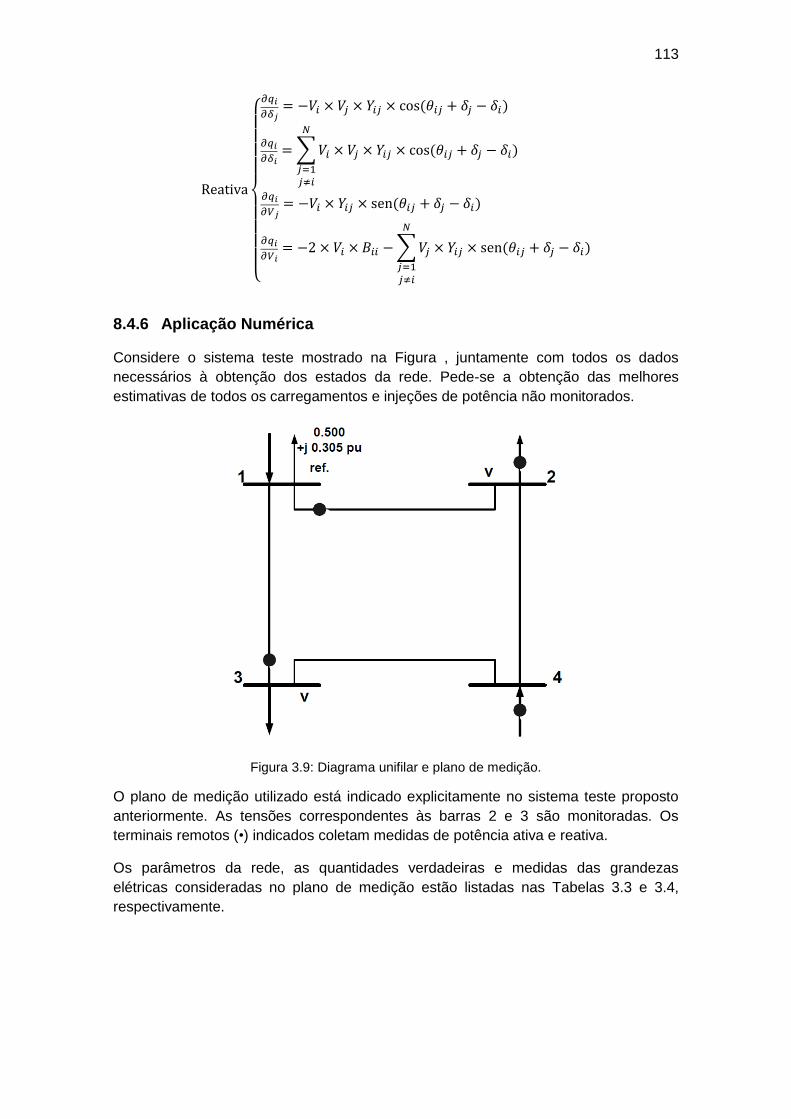
113
{
( )
∑ ( )
( )
∑ ( )
8.4.6 Aplicação Numérica
Considere o sistema teste mostrado na Figura , juntamente com todos os dados
necessários à obtenção dos estados da rede. Pede-se a obtenção das melhores
estimativas de todos os carregamentos e injeções de potência não monitorados.
Figura 3.9: Diagrama unifilar e plano de medição.
O plano de medição utilizado está indicado explicitamente no sistema teste proposto
anteriormente. As tensões correspondentes às barras 2 e 3 são monitoradas. Os
terminais remotos (•) indicados coletam medidas de potência ativa e reativa.
Os parâmetros da rede, as quantidades verdadeiras e medidas das grandezas
elétricas consideradas no plano de medição estão listadas nas Tabelas 3.3 e 3.4,
respectivamente.

114
Tabela 3.3: Parâmetros do sistema.
Ramo Resistência (pu) Reatância (pu) Susceptância Shunt ( ⁄ ) (pu)
1 -2 0,01008 0,05040 0,05125
1-3 0,00744 0,03720 0,03875
2-4 0,00744 0,03720 0,03875
3-4 0,01272 0,06360 0,06375
SBase = 100 MVA e VBase = 230 KV
Tabela 3.4: Valores verdadeiros e medidos.
Grandezas Reais (pu) Medidas (pu)
V2 0,98241 0,98381
V3 0,96902 0,96892
t12 0,38689 0,38041
t31 -0,97075 -0,97527
u12 0,22319 0,22423
u31 -0,63533 -0,64493
p2 -1,70000 -1,68090
p4 2,38000 2,38200
q2 -1,05400 -1,04220
q4 1,31850 1,30830
A condição inicial do processo iterativo deve assumir o perfil plano de tensões
(magnitude igual a 1 pu e ângulo 0 graus), sendo que a tolerância adotada é igual a
10-5. O critério de convergência a ser utilizado é:
| |
Admita ainda que o desvio-padrão dos medidores são todos iguais a .
Para cada iteração realizada, deseja-se que os seguintes resultados intermediários
sejam apresentados:
1. A indicação das equações utilizadas na obtenção de cada valor numérico
presente na matriz de observação ( );
2. Os parâmetros da equação normal de Gauss, isto é, a matriz ganho e o vetor
independente ( );
3. Os vetores de correções ; de estados ( ); de grandezas estimadas ( ) e o
de resíduos ( );
4. Adicionalmente, pede-se para calcular em cada iteração o índice ( ) =
SPQR, ou seja:

115
( ) ( )
5. Obtida a convergência, apresente uma tabela comparativa listando a relação
de medidas do plano de medição utilizado e os correspondentes valores:
verdadeiros, medidos e estimados em cada iteração. Adicionalmente,
acrescentar à tabela de resultados, obtidos após a convergência do processo
iterativo, os seguintes parâmetros de desempenho: erro absoluto ( ) e erro
relativo percentual ( ), correspondente a cada medida e definidos pelas
seguintes equações:
| |
| |
Solução
O problema proposto será resolvido pelo método da equação normal de Gauss.
Primeiramente, determina-se a matriz YBus do sistema:
[
]
Em seguida, vêm as equações das funções que relacionam as grandezas medidas às
variáveis de estado:
Medidas de tensão: As medidas de tensão nas barras 2 e 3 são simultaneamente
grandezas medidas e variáveis de estado. Portanto, nas posições correspondentes na
matriz H, assumem valores unitários.
Medidas de fluxo de potência ativa e reativa:
( )
( )
(
) ( )
(
) ( )
Medidas de injeções de potência ativa e reativa:
( ) ( )
( ) ( )
( ) ( )
( ) ( )

116
Matriz Jacobiana (H):
[
]
Cada elemento da matriz , apresentada anteriormente, é calculado a partir das
seguintes expressões:
( )
( )
( )
( )
( )
( )
(
) ( )
( )
( )
( )
(
) ( )
( ) ( )

117
( )
( )
( ) ( )
( )
( )
( ) ( )
( )
( )
( ) ( )
( ) ( )
( )
( )
( ) ( )
( )
( )
( )
( ) ( )
( )
( )
( ) ( )
A seguir são apresentadas as matrizes jacobiana (H) e ganho (G), em cada iteração,
até a obtenção da solução final do problema:

118
[
]
[
]
[
]
[
]
[
]
[
]
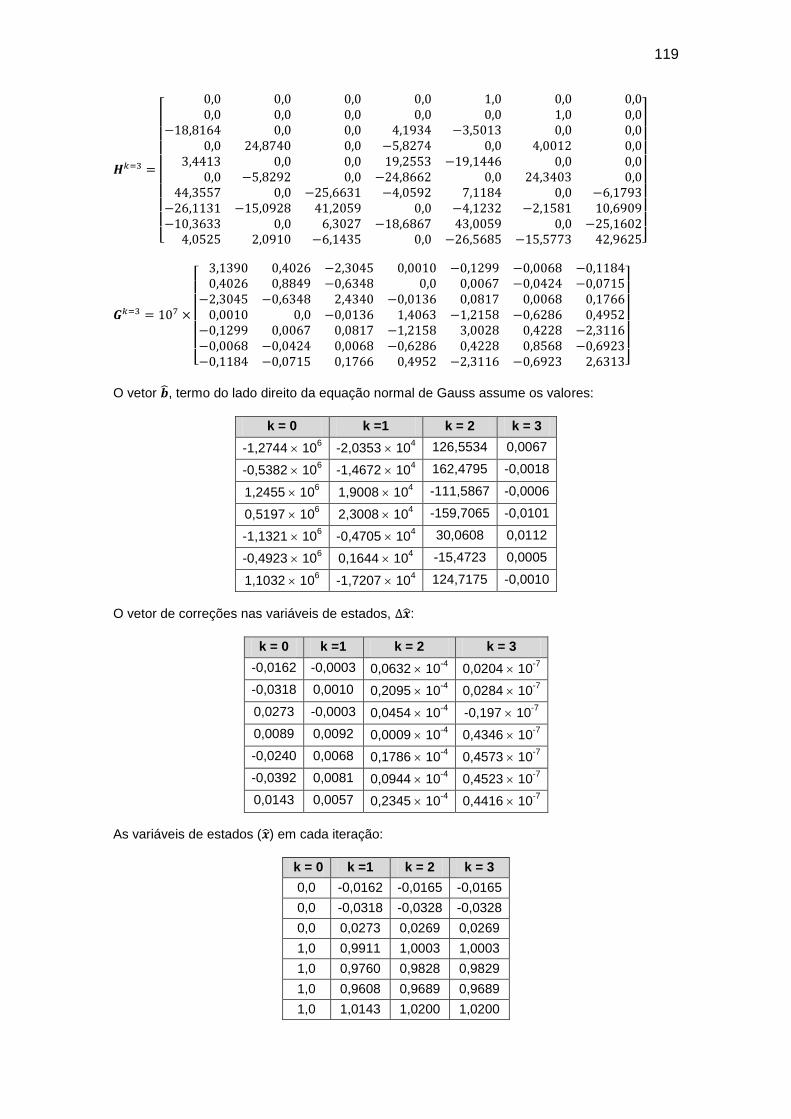
119
[
]
[
]
O vetor , termo do lado direito da equação normal de Gauss assume os valores:
k = 0 k =1 k = 2 k = 3
-1,2744 106 -2,0353 10
4 126,5534 0,0067
-0,5382 106 -1,4672 10
4 162,4795 -0,0018
1,2455 106 1,9008 10
4 -111,5867 -0,0006
0,5197 106 2,3008 10
4 -159,7065 -0,0101
-1,1321 106 -0,4705 10
4 30,0608 0,0112
-0,4923 106 0,1644 10
4 -15,4723 0,0005
1,1032 106 -1,7207 10
4 124,7175 -0,0010
O vetor de correções nas variáveis de estados, :
k = 0 k =1 k = 2 k = 3
-0,0162 -0,0003 0,0632 10-4
0,0204 10-7
-0,0318 0,0010 0,2095 10-4
0,0284 10-7
0,0273 -0,0003 0,0454 10-4
-0,197 10-7
0,0089 0,0092 0,0009 10-4
0,4346 10-7
-0,0240 0,0068 0,1786 10-4
0,4573 10-7
-0,0392 0,0081 0,0944 10-4
0,4523 10-7
0,0143 0,0057 0,2345 10-4
0,4416 10-7
As variáveis de estados ( ) em cada iteração:
k = 0 k =1 k = 2 k = 3
0,0 -0,0162 -0,0165 -0,0165
0,0 -0,0318 -0,0328 -0,0328
0,0 0,0273 0,0269 0,0269
1,0 0,9911 1,0003 1,0003
1,0 0,9760 0,9828 0,9829
1,0 0,9608 0,9689 0,9689
1,0 1,0143 1,0200 1,0200
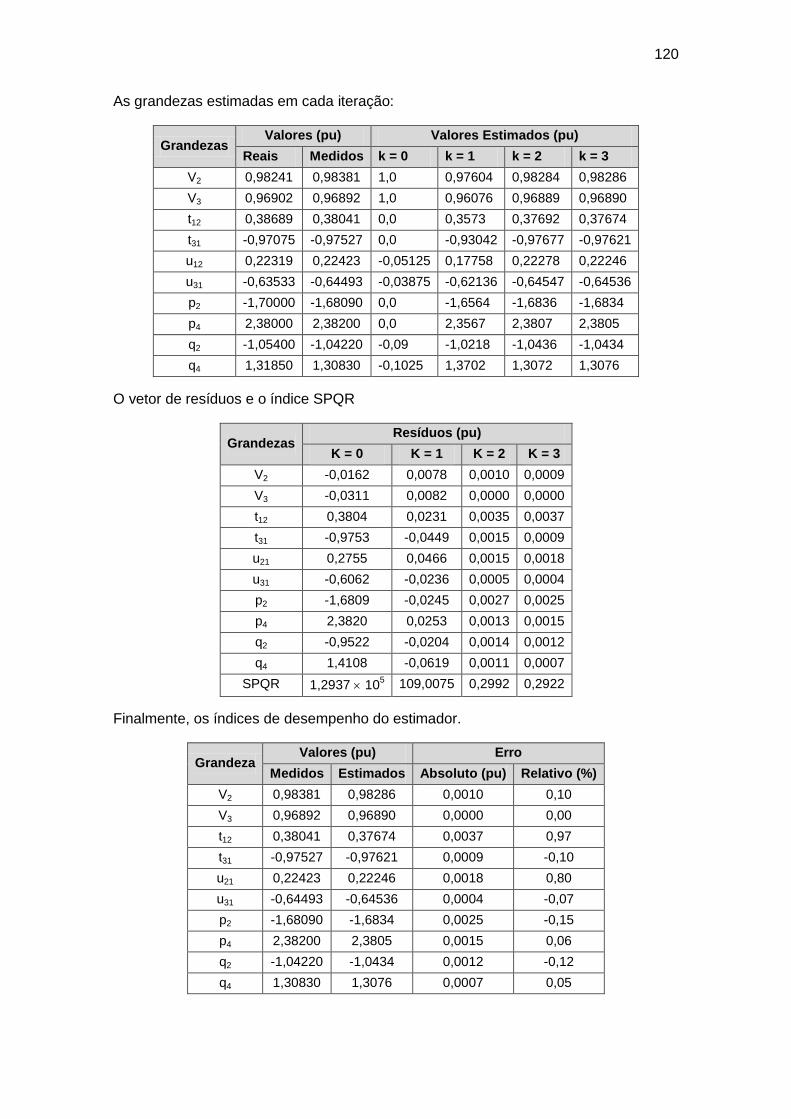
120
As grandezas estimadas em cada iteração:
Grandezas Valores (pu) Valores Estimados (pu)
Reais Medidos k = 0 k = 1 k = 2 k = 3
V2 0,98241 0,98381 1,0 0,97604 0,98284 0,98286
V3 0,96902 0,96892 1,0 0,96076 0,96889 0,96890
t12 0,38689 0,38041 0,0 0,3573 0,37692 0,37674
t31 -0,97075 -0,97527 0,0 -0,93042 -0,97677 -0,97621
u12 0,22319 0,22423 -0,05125 0,17758 0,22278 0,22246
u31 -0,63533 -0,64493 -0,03875 -0,62136 -0,64547 -0,64536
p2 -1,70000 -1,68090 0,0 -1,6564 -1,6836 -1,6834
p4 2,38000 2,38200 0,0 2,3567 2,3807 2,3805
q2 -1,05400 -1,04220 -0,09 -1,0218 -1,0436 -1,0434
q4 1,31850 1,30830 -0,1025 1,3702 1,3072 1,3076
O vetor de resíduos e o índice SPQR
Grandezas Resíduos (pu)
K = 0 K = 1 K = 2 K = 3
V2 -0,0162 0,0078 0,0010 0,0009
V3 -0,0311 0,0082 0,0000 0,0000
t12 0,3804 0,0231 0,0035 0,0037
t31 -0,9753 -0,0449 0,0015 0,0009
u21 0,2755 0,0466 0,0015 0,0018
u31 -0,6062 -0,0236 0,0005 0,0004
p2 -1,6809 -0,0245 0,0027 0,0025
p4 2,3820 0,0253 0,0013 0,0015
q2 -0,9522 -0,0204 0,0014 0,0012
q4 1,4108 -0,0619 0,0011 0,0007
SPQR 1,2937 105 109,0075 0,2992 0,2922
Finalmente, os índices de desempenho do estimador.
Grandeza Valores (pu) Erro
Medidos Estimados Absoluto (pu) Relativo (%)
V2 0,98381 0,98286 0,0010 0,10
V3 0,96892 0,96890 0,0000 0,00
t12 0,38041 0,37674 0,0037 0,97
t31 -0,97527 -0,97621 0,0009 -0,10
u21 0,22423 0,22246 0,0018 0,80
u31 -0,64493 -0,64536 0,0004 -0,07
p2 -1,68090 -1,6834 0,0025 -0,15
p4 2,38200 2,3805 0,0015 0,06
q2 -1,04220 -1,0434 0,0012 -0,12
q4 1,30830 1,3076 0,0007 0,05

121
Observe que erros relativos são todos menores que 1%.
9. ESTIMADORES DE ESTADOS DESACOPLADOS
Os estimadores desacoplados utilizam as mesmas aproximações feitas no algoritmo
de fluxo de potência desacoplado rápido [11]. As características básicas desses
estimadores são [10]:
Utilização do desacoplamento ;
Utilização de matrizes constantes (matriz ganho G e/ou matriz de jacobiana H).
Consequentemente, as aproximações anteriores irão impactar a solução da Equação
Normal de Gauss. Portanto, considere inicialmente a matriz de informação H
subdividida da seguinte forma:
( ) [
] (3.48)
em que as partições matriciais identificadas na Equação (3.48) são formadas da
seguinte maneira:
( )
(3.49)
( )
(3.50)
( )
(3.51)
( )
(3.52)
e a matriz de ponderação , isto é, a matriz de covariância dos erros dos medidores,
expressa como:
[
] (3.53)
em que as submatrizes e representam as submatrizes de covariância dos
erros de medição associados às medidas de potência ativa ( e ), reativa ( , ) e de
tensão ( ).
O vetor de quantidades medidas é particionado da seguinte maneira:
[
] (3.54)

122
sendo:
[ ] (3.55)
[ ] (3.56)
O modelo linear de medição assume a seguinte forma:
[
] [
] [
] [
] (3.57)
sendo:
( ) ( ) [
] (3.58)
e
[
] (3.59)
A matriz ganho pode ser reescrita e assumir a seguinte forma:
[
] [
]
[
] (3.60)
tal que,
[
] [
] (3.61)
A partir da premissa de que para o nível de tensão acima de 69 kV, em geral a relação
X/R >> 1, as matrizes H e G podem sofrer as seguintes transformações:
As submatrizes e predominam sobre as partições e ;
e predominam sobre e .
Essas aproximações resultam no desenvolvimento de dois tipos de estimadores
desacoplados, que serão apresentados nas subseções seguintes.

123
9.1 Estimadores Desacoplados no Algoritmo
Para este tipo de estimador, as seguintes aproximações são aplicadas no lado direito
da equação normal de Gauss:
As submatrizes e são calculadas considerando-se o perfil plano de tensões
( pu e radianos), para todas as barras do sistema;
As submatrizes e são desprezadas;
As submatrizes e , uma vez fatoradas, são mantidas constantes ao longo das
iterações.
Sendo assim, o estimador desacoplado rápido no algoritmo pode ser sumarizado pela
seguinte equação:
[
] [
] [
] ( ) (3.62)
As iterações deste algoritmo são executadas da seguinte maneira:
½ iteração do subproblema
[
(
)]
( ) (3.63)
(3.64)
½ iteração do subproblema QV:
[
(
)]
[ ( )] (3.65)
(3.66)
Deve-se observar que no cálculo da partição matricial
(
), bem como nas
equações de potência representadas pelo vetor ( ), os valores dos estados
angulares usados são os mais atuais, isto é, são aqueles obtidos por meio da Equação
(64).
9.2 Estimadores Desacoplados no Modelo
No caso deste estimador, as aproximações sugeridas anteriormente são aplicadas à
matriz de informação (
)
, isto é:
A matriz (
)
é calculada considerando-se para todas as barras do sistema, o perfil
plano de tensões, isto é, pu e radianos;

124
As submatrizes e são desprezadas;
As resistências das linhas de transmissão são desprezadas no cálculo da submatriz
.
Com essas aproximações, a matriz de informação transforma-se em:
(
)
[
] (3.67)
As iterações para este algoritmo são executadas da seguinte maneira:
½ iteração do subproblema :
(
)
( ) (3.68)
(3.69)
½ iteração do subproblema QV:
(
)
[ ( )] (3.70)
(3.71)
sendo que as submatrizes e
são calculadas considerando-se apenas as
partições matriciais , e , , respectivamente. Ou seja:
(3.72)
(3.73)
Cabe ainda observar que no cálculo da partição matricial
(
), os valores dos
estados angulares são aqueles obtidos pela Equação (69)
Em relação às propriedades de convergência dos Estimadores de Estados
Desacoplados Rápido, deve-se observar o seguinte:
O estimador desacoplado no algoritmo converge para o mesmo ponto final de
solução. Apenas o número de iterações necessárias é alterado. Isso ocorre
porque as aproximações feitas na matriz de informação afetam a convergência
do processo iterativo sem alterar a solução final;
Por outro lado, as aproximações impostas à formulação matemática do
estimador desacoplado no modelo podem provocar alterações no ponto final de
solução do problema. No entanto, tais alterações são desprezíveis se o nível
de magnitude de tensão do sistema for elevado, por exemplo, sistemas de
extra-alta-tensão (EAT) e utra-alta-tensão (UAT). Usualmente, o estimador
desacoplado rápido no modelo requer um número menor de iterações que o
estimador desacoplado rápido no algoritmo.

125
10. REFERÊNCIAS
[1] F. C. Schweppe, Wildes and D. B. Rom. “Power System Static Estimation, Part I, II
and III”. IEEE Transactions on Power Apparatus and Systems, Vol. PAS-89(1), pp.
120-135, January 1970.
[2] A. Bose and T. A. Green. “New Modeling, Analysis and Computation Techniques
Needed for Power System Control Centers”. Electrical Power and Energy Systems,
Vol. 15, No. 3, pp. 163-168, January 1993.
[3] T. E. Dy Liacco. “The Role and Implementation of State Estimation in an Energy
Management System”. Electrical Power and Energy System, Vol. 12, No. 2, pp. 75-
79, April 1990.
[4] F. F. Wu. “Power System State Estimation: A Survey”. Electrical Power and Energy
System, Vol. 12, No. 2, pp. 80-87, April 1990.
[5] D. M. Falcão, S. M. Karaki and A. Brameller. “Non-quadratic State Estimation: a
Comparison of Methods”. Proceedings of the 7th PSSC Conference, pp. 1002-1006,
1981.
[6] A. J. A. Simões-Costa and V. H. Quintana. “Na Orthogonal Row Processing
Algorithm for Power Sequential State Estimation”. IEEE Transactions on Power
Apparatus and Systems, Vol. 100, No. 8, pp. 3791-3800, August 1981.
[7] V. H. Quintana, A. J. A. Simões-Costa and M. Mier. “Bad Data Detection and
Identification Techniques Using Estimation Orthogonal Methods”. IEEE
Transactions on Power Apparatus and Systems, Vol. PAS-101, No. 9, pp. 3356-
3364, September 1982.
[8] A. Monticelli, C. A. Murari and F. Wu. “A Hybrid State Estimator: Solving Normal
Equations by Orthogonal Transformations. IEEE Transactions on Power Apparatus
and Systems, Vol. 104, No. 12, pp. 3460-3468, December 1985.
[9] A. Gjelsvik, A. Aam and L. Holten. “Hachtel’s Augmented Matrix Method – a Rapid
Method Improving Numerical Stability in Power System Static State Estimation”.
IEEE Transactions on Power Apparatus and Systems, Vol. 104, No. 11, pp. 2987-
2993, 1985.
[10] A. Monticelli A. Garcia. “Fast Decoupled State Estimator”. IEEE Transactions on
Power Systems, Vol. 5, No. 2, pp. 556-564, May 1990.
[11] B. Stott and O. Alsac. “Fast Decoupled Load Flow”. IEEE Transactions on Power
Apparatus and Systems, Vol. 93, pp. 859-869, 1974.
CAPÍTULO 4 - ANÁLISE DE
CONTINGÊNCIAS EM SISTEMAS
ELÉTRICOS DE POTÊNCIA
1. INTRODUÇÃO
Um sistema de potência pode sofrer modificações repentinas em seu estado operativo
como consequência de anormalidades que nele ocorrem, tais como surtos, curto-
circuitos e sobrecargas. A proteção do sistema é ajustada para desconectar o mais
rapidamente possível os componentes diretamente afetados pela anormalidade, para
que os mesmos não sejam danificados e para que demais partes do sistema possam
continuar operando.
Dá se o nome de contingência aos desligamentos ou saídas de serviço de
componentes de um sistema. As contingências mais comuns são: saídas de linhas de
transmissão; saídas de transformadores; saídas de compensadores shunts; saídas de
geradores e saídas de cargas. Denomina-se contingência simples aquela que consiste
no desligamento de um único componente. No caso da desconexão de dois ou mais
componentes simultaneamente, denomina-se contingências múltiplas.
Os sistemas de transmissão devem ser projetados e operados dentro de critérios que
permitam a continuidade de suprimento a todos os consumidores quando da
ocorrência de todas as possíveis contingências simples (ou, se isto não é viável, pelo
menos a maioria delas). Por essa razão, durante o planejamento da expansão e da
operação da rede elétrica, devem ser realizados estudos envolvendo a simulação da
ocorrência de contingências, para que se possa conhecer o comportamento do
sistema em tais situações e, com base nesse conhecimento, adotar medidas que
possam satisfazer os critérios acima enunciados. Esses estudos são denominados de
análise de contingências.
Também do ponto de vista da operação, há necessidade de se efetuar análise de
contingências. Suponha, por exemplo, que ocorra uma contingência simples qualquer
e, portanto, o sistema passe a operar em emergência. Para o operador passa a ser de
extrema importância conhecer o que pode acontecer com o estado da rede, caso uma
segunda contingência ocorra. Sabendo-se o que poderá ocorrer no caso de haver uma
segunda contingência, o operador pode adotar medidas preventivas que evitem
maiores problemas, se a segunda contingência realmente ocorrer.
É valido salientar que a análise de contingência é um estudo em regime permanente.
O que se deseja determinar é, após uma contingência e passado o período transitório,
o novo estado alcançado pela rede (novo perfil de tensões nodais, novos fluxos de
potência no ramos, novas gerações, novas perdas, etc.). Uma vez determinado esse
novo ponto de operação, pode-se constatar facilmente se o mesmo apresenta valores

127
aceitáveis ou não para a operação. No caso de ocorrerem valores inaceitáveis, uma
ou várias ações de controle devem ser acionadas. As principais ações de controle
utilizadas para tentar eliminar as violações de limites no estado da rede são:
redespacho das gerações ativas e reativas; chaveamento de equipamentos de
reserva; rejeição de cargas; reespecificação dos níveis de tensão e da frequência,
dentre outras alternativas.
Deve-se atentar para o fato de que a análise de contingências é um estudo puramente
indicativo da ocorrência ou não das violações anteriormente referidas. A análise
fornece a base para que se decida ou não deflagrar as ações de controle, mas não
determina qual ou quais ações devem ser exercidas. Essa escolha é, geralmente, feita
por meio de outros estudos (redespacho, rejeição de carga, etc.).
Em sua essência, a análise de contingências constitui-se de um grande número de
soluções de fluxo de potência, sendo que cada solução corresponde a uma situação
de contingência, especificada em relação a um determinado ponto de operação do
sistema. Esse ponto de operação, escolhido como ponto de partida para a análise de
contingências é, geralmente, denominado caso base. Se a análise revelar que a
segurança do sistema é mantida em todas as situações de contingências que se
deseje simular, o caso base é, então, considerado seguro. Caso contrário, ele é
considerado inseguro e, portanto, algumas ações de controle como as anteriormente
citadas deverão ser tomadas para conduzi-lo à segurança.
Embora a análise de segurança seja, na realidade, um cálculo de fluxo de potência, o
método mais comumente utilizado para esse cálculo (Newton-Raphson) não constitui
uma ferramenta satisfatória para a análise. Devido ao número muito grande de
soluções repetidas que devem ser efetuadas, o aspecto de tempo computacional
passa a ser crítico.
Essa situação é particularmente verdadeira nas aplicações em operação dos sistemas.
O método desacoplado-rápido, nesse caso, passa a ser uma alternativa bastante
atraente para o emprego em análise de contingências. Entretanto, em termos de
operação, nem mesmo o desacoplado-rápido, em sua formulação convencional, é
suficientemente rápido para processar as centenas (as vezes milhares) de
contingências simples ou múltiplas necessárias na análise de segurança da rede,
dentro dos exíguos intervalos de tempo (da ordem de algumas unidades de minutos)
em que esse processamento deve ser feito. Sendo, portanto, necessárias técnicas
ainda mais rápidas.
Por outro lado, o aspecto da precisão dos resultados não é tão crítico na análise de
contingências, pois o que se deseja é a indicação da ocorrência ou não de violação de
limites no estado de contingência, não sendo de tanta importância a determinação
com exatidão do montante dessas violações.
Deve-se também ter em mente que algumas dessas contingências podem ser
bastante severas, isto é, quando ocorrem, levam o sistema a um estado operativo
muito diferente do caso base, com grandes deformações nos perfis de tensões e de
fluxos de potência nos ramos. Nessas circunstâncias, o condicionamento matemático
relativo a esse estado operativo torna-se muito difícil. Por isso, é necessário que todos

128
os métodos de análise possuam grande confiabilidade de convergência, a fim de que
mesmo contingências severas possam ser analisadas.
Conclui-se, então, que um método de análise de contingências deve,
necessariamente, ser rápido e ter grande confiabilidade de convergência, porém, não
necessita ser de grande precisão. Baseadas nessa premissa, várias técnicas têm sido
propostas na literatura, desde a utilização de fluxo DC, até o emprego de métodos de
reconhecimento de padrões.
Não é objetivo desse documento fornecer uma visão de todas as metodologias
existentes, mas sim mostrar aquelas que são mais utilizadas. A seguir descreve-se,
em seus aspectos gerais, o método de compensação, o qual é bastante utilizado em
análise de contingências.
2. ANÁLISE DE ALTERAÇÕES EM REDES ELÉTRICAS –
MÉTODOS DE COMPENSAÇÃO
A necessidade de se estudar o efeito de alterações na topologia de redes elétricas,
devido à adição ou remoção de ramos e nós, surge em várias situações, tais como
análise de contingências e nos estudos de planejamento da expansão do sistema. As
alterações na topologia da rede refletem-se em modificações nos elementos das
matrizes que a modelam.
Em muitos casos, as modificações ocorrem em apenas alguns poucos desses
elementos. A ideia central dos métodos de compensação é utilizar, nos cálculos
relativos aos estados da rede após as alterações em sua topologia, as mesmas
matrizes que descreviam a rede antes dessas alterações. Desse modo, consegue-se
evitar re-inversões, refatorações, etc. Os erros resultantes dessa utilização “indevida”
são compensados por meio de termos adicionais acrescentados às equações de
solução da rede.
É possível deduzir as equações dos métodos de compensação de diversas maneiras.
Algumas se baseiam em análise de circuitos lineares, outras em álgebra matricial. As
deduções seguintes baseiam-se nos dois aspectos visando maior entendimento do
processo.
Suponha a seguinte equação matricial linear:
(4.1)
em que é a matriz de coeficientes; é o vetor de termos independentes e é o
vetor de incógnitas.
Suponha ainda que a Equação (4.1) tenha solução única, isto é, a matriz seja
quadrada, de dimensão e não singular. Obviamente, o vetor de incógnitas
pode ser calculado diretamente pela Equação (4.2).

129
( ) (4.2)
Imagine agora que ocorram alterações nos elementos da matriz dos coeficientes, de
tal forma que a mesma passa a ser uma nova matriz . Se o vetor de termos
independentes ( ) permanecer inalterado, a equação matricial que descreve a nova
situação é dada em (4.3).
(4.3)
O vetor de incógnitas passou também a ter outro valor, devido às alterações na matriz
dos coeficientes. Logo, pode-se escrever:
(4.4)
A nova matriz de coeficientes pode ser escrita em função da matriz original , da
forma mostrada em (4.5):
(4.5)
em que é a matriz que contém as alterações nos termos . De modo semelhante,
o vetor pode ser escrito como:
(4.6)
em que é o vetor das variações ocorridas nos valores de .
Substituindo as Equações (4.5) e (4.6) na Equação (4.3), obtém-se:
( ) ( ) (4.7)
Suponha agora que a matriz possa ser definida pela seguinte expressão:
(4.8)
em que é uma matriz diagonal com dimensão , contendo os valores das
alterações em e é uma matriz de incidência com dimensão (matriz cujos
elementos são todos iguais a 1, -1 ou 0).
Nesse caso, a Equação (4.5) pode ser reescrita como:
(4.9)

130
A Equação (7) passa a ser:
( ) ( ) (4.10)
Então, para uma dada alteração na matriz , pode-se obter a nova solução por meio
da Equação (4.11):
( ) (4.11)
Agora, utilizando o lema da matriz inversa, o qual diz que a inversa da expressão
matricial ( ) é dada por:
( )
(4.12)
sendo:
( )
(4.13)
Finalmente, combinando as Equações (4.11) e (4.12), obtém-se:
(
) (4.14)
A Equação (14) mostra que a solução após a modificação é obtida utilizando-se
apenas a inversa da matriz original. Os diferentes métodos de compensação são
baseados em diferentes maneiras de se resolver a Equação (4.14).
2.1 Pré-Compensação
Nesse método, a Equação (4.14) é reescrita como:
(
) (4.15)
em que é uma matriz unitária ou identidade, de mesma dimensão que a matriz ,
isto é, .
O termo entre parênteses na Equação (4.15) também é uma matriz com dimensão
e representa a compensação que deve ser feita no vetor independente .
Como mostra a expressão, o vetor compensado pode ser, então, pré-multiplicado pela
inversa da matriz original para fornecer o resultado final.

131
2.2 Pós-Compensação
Nesse caso, a Equação (4.14) é reescrita na forma seguinte:
( )
(4.16)
Novamente, o termo entre parênteses na Equação (4.16) representa a compensação,
que agora é aplica depois que foi avaliado o produto .
2.3 Compensação Intermediária
Em termos práticos, a matriz inversa nunca é avaliada explicitamente. Em vez
disso, a matriz é fatorada e seus fatores utilizados em um processo de
substituições sucessivas diretas e reversas que fornece os resultados desejados. Um
dos métodos de fatoração mais comumente utilizado é o chamado método LU, em que
a matriz é decomposta no produto de uma matriz triangular inferior L e uma matriz
triangular superior U, ou seja:
(4.17)
Portanto,
(4.18)
Substituindo na Equação (4.14) por , obtém-se
( ) (4.19)
A Equação (4.19) estabelece uma compensação intermediária, pois o termo entre
parênteses, é aplicado após o produto e antes da pré-multiplicação por .
A escolha de um dos métodos de compensação normalmente é feita analisando-se
cuidadosamente qual deles envolve o menor número de operações, em uma
determinada aplicação. Essa análise revela que a escolha do método mais indicado é
altamente dependente do problema que se deseja resolver.
Para ilustrar o processo de alteração na matriz de admitância utilizando as operações
definidas anteriormente, considere o sistema de três barras mostrado na Figura 4.1.

132
Figura 4.1: Sistema com três barras.
A matriz de admitância desse sistema é dada a seguir:
[
]
Suponha que esse sistema sofra a perda do banco de capacitores conectado à barra
3. Parra essa nova condição, a matriz , pode ser obtida por:
sendo:
Então, como o elemento será removido, tem-se:
[ ]
Logo:
[ ] [
]
E portanto,
[
] [
] [
]

133
Suponha agora que o sistema da Figura 1 sofra a perda da linha L12. Para esse caso,
tem-se:
[
] [
]
Portanto,
[
] [
]
E
[
] [
] [
]
Supondo agora que ao sistema da Figura 1 seja adicionada uma linha entre as barras
1 e 3 com as mesmas características da linha L13 existente. Para esse caso, tem-se:
[
] [
]
[
] [
]
[
] [
] [
]
Considere agora que o sistema da Figura 4.1 sofra as seguintes alterações
simultaneamente: perda do banco de capacitores na barra 3 e a perda da linha L23.
Nesse caso, as matrizes D e M assumem as formas:
[
] [
]
[
] [
] [
] [
]
E a matriz de admitância é dada por:
[
] [
] [
]

134
Exercício Proposto
Determine o estado do sistema da Figura 4.2, após a perda da linha que interliga as
barras 1 e 4. Utilize a formulação para o fluxo DC e as equações para alterações em
redes elétricas.
Figura 4.2: Sistema com 4 barras.
Tabela 4.1: Dados das Linhas.
Linha X (p.u.)
L12 0,20
L13 0,15
L14 0,30
L24 0,25
L34 0,40
Tabela 4.2: Dados das barras.
Barra Geração (p.u.) Carga (p.u.)
1 3,5 0,0
2 1,5 0,0
3 0,0 2,2
4 0,0 2,8
Obs:. Lembre-se que para resolver o problema de fluxo DC a matriz YBus deve ter a
linha e a coluna referentes à barra de referência eliminadas, portanto, a matriz de
incidência M deverá também ter a linha correspondente à barra de referência
eliminada.
CAPÍTULO 5 - ANÁLISE DE
SENSIBILIDADE
1. INTRODUÇÃO
É bastante comum em análise de sistemas de potência, seja no planejamento ou na
operação, desejar-se determinar o comportamento do sistema frente às variações nos
valores das várias grandezas que intervêm no funcionamento do mesmo.
Pode ser necessário, por exemplo, verificar que efeitos irão produzir no estado do
sistema alterações no perfil das cargas conectadas em uma ou mais barras. Pode-se
também desejar estabelecer, no caso da ocorrência de violações nos limites
operativos de uma determinada grandeza, quais são as variáveis de controle mais
indicadas para, por meio da reespecificação de seus valores, tentar eliminar essas
violações.
Nos casos em que as variações possam ser consideradas como pequenas em
magnitude, o novo estado do sistema pode ser reavaliado prontamente, sem que haja
necessidade de processar novos casos de fluxo de potência, por meio da técnica
denominada análise de sensibilidade. Essa técnica permite efetuar uma linearização
do modelo da rede em estado permanente e, por meio da solução direta do modelo
linearizado, determinar, com boa aproximação, as reações do sistema às variações
ocorridas. Se o analista dispuser dos resultados de um fluxo de potência retratando o
estado da rede antes da ocorrência das variações, o que quase sempre é o caso,
então, o novo estado (após a ocorrência) é obtido simplemente somando-se o anterior
com as variações calculadas. Vale observar que o esforço computacional necessário
para a solução do modelo de análise de sensibilidade situa-se em níveis razoáveis,
permitindo, inclusive, a aplicação dessa técnica em controle e supervisão de redes,
para auxiliar o operador no estabelecimento de estratégias de controle corretivo, em
casos de emergência.
2. MODELO MATEMÁTICO PARA ANÁLISE DE SENSIBILIDADE
O modelo matemático de um sistema de potência funcionando em estado permanente
pode ser escrito na seguinte forma:
( ) (5.1)
Na equação matricial acima, é o vetor que contém as equações de equilíbrio de
potências ativa e reativa nas barras (ou seja, as equações e
do fluxo de
potência convencional).

136
O vetor contém variáveis de controle do sistema tais como potências ativas geradas
nas barras PV, módulos das tensões nas barras de referência e PV, taps de
transformadores controladores e outros que possam ser de interesse incluir.
O vetor contém as variáveis de estado do sistema. Na análise de sensibilidade serão
consideradas variáveis de estado os ângulos de fase das tensões nas barras PV e PQ
e os módulos das tensões nas barras PQ, como é usual.
O vetor , finalmente, é constituído pelas cargas ativas e reativas em todas as barras
do sistema.
O ângulo da tensão da barra de referência, bem como os parâmetros dos
componentes (resistências, reatâncias e susceptâncias shunt), são considerados fixos
e, portanto, não interferem diretamente na análise.
Dessa forma, o vetor tem elementos, o vetor também tem
elementos, o vetor tem elementos e o vetor tem elementos, onde é o
número total de barras da rede, é o número de barras PV, é o número de
barras PQ e é o número de variáveis escolhidas como de controle do sistema.
As demais grandezas, tais como fluxos de potências ativa e reativa nos ramos,
potências reativas geradas nas barras PV, potências ativa e reativa geradas na barra
de referência, perdas etc. são classificadas como grandezas dependentes funcionais,
já que também podem ser expressas como funções das variáveis , e , na forma:
( ) (5.2)
Em que é o vetor que contém os valores numéricos dessas grandezas e é o vetor
das equações que definem as mesmas.
Tomando-se o diferencial total da Equação (5.1), obtém-se:
(5.3)
A Equação (5.3) estabelece de forma exata a inter-relação entre os grupos de
variáveis do sistema para variações infinitesimais nessas variáveis. Do ponto de vista
prático, pode-se obter uma relação aproximada se, na Equação (5.3) os diferenciais
, e forem substituídos por variações finitas , e . Assim, pode-se
escrever:
(5.4)
A rigor, a Equação (5.4) não deveria ser escrita com sinal de igualdade, em vista da
aproximação existente, porém, se for feita a suposição de que as variações , e
se mantém pequenas em magnitudes, o erro será pequeno e a igualdade pode ser
adotada.

137
Assim, pode-se concluir que o resultado da análise de sensibilidade será tanto mais
preciso quanto menores forem as perturbações. É bastante difícil, entretanto,
determinar faixas de valores aceitáveis para as perturbações, pois isso varia
consideravelmente de sistema para sistema e, para um mesmo sistema, varia também
com os níveis de tensão e com o carregamento das linhas e transformadores.
Somente o conhecimento prévio, adquirido por meio da convivência com o sistema,
ou, então, um processo de tentativa e erro poderão fornecer indicações acerca desses
valores.
Para a derivação do modelo matemático a seguir será feita a suposição de que as
variações , e são suficientemente pequenas para permitir tomar como exata
(dentro da precisão requerida) a Equação (5.4).
2.1 Matrizes de Sensibilidade
As matrizes
,
e
que aparecem na Equação (5.4) são matrizes jacobianas
definidas respectivamente em relação às variáveis de controle, às variáveis de estado
e às cargas. Essas matrizes são denotadas como , e .
A matriz tem dimensão ( ) . tem dimensão ( )
( ) e tem dimensão ( ) .
é a mesma matriz jacobiana utilizada no método de Newton-Raphson para a
solução do problema de fluxo de potência convencional. A Equação (5.4) pode,
portanto, ser reescrita como:
(5.5)
Da Equação (5.5) pode-se escrever:
( ) ( )
(5.6)
ou ainda:
(5.7)
sendo:
( ) (5.8)
( ) (5.9)
As matrizes e , que são matrizes não esparsas definem a sensibilidade das
variáveis de estado com relação às variáveis de controle e com relação às cargas
. Por isso, essas matrizes são chamadas matrizes de sensibilidade das variáveis de
estado em relação às variáveis de controle com relação às cargas, respectivamente. A
Equação (5.7) permite determinar, por meio de simples multiplicações de matrizes, as

138
variações que irão ocorrer nas variáveis de estado quando ocorrem variações em uma
ou mais variáveis de controle ou em uma ou mais cargas (ou ambos os casos). Essa
equação é a essência da análise de sensibilidade.
2.2 Solução da Equação Matricial de Sensibilidade
O objetivo da análise de sensibilidade, na prática, é a determinação do vetor para
valores dados do vetor ou do vetor ou de ambos. Evidentemente, deve ser
evitada a computação da inversa explícita da matriz . Dois esquemas de solução
podem ser utilizados:
2.2.1 Obtenção das Matrizes de Sensibilidade Coluna por Coluna
A Equação (5.8) mostra que a coluna da matriz é dada pelo produto da matriz
( ) pela coluna da matriz – . Pode-se, portanto, escrever:
( ) (
) (5.10)
sendo
e
as colunas k das matrizes e , repesctivamente.
Da Equação (5.10) pode-se escrever:
(
) (5.11)
Supondo estar fatorada a matriz , a obtenção de
torna-se trivial: basta calcular a
coluna da matriz jacobiana – , o que é feito de maneira direta, por simples
substituição de valores nas expressões analíticas que dão as derivadas parciais das
equações com relação às variáveis e, em seguida, por um processo de
substituições sucessivas, calcular
.
Repetindo-se este processo para as r colunas de , obtém-se a matriz completa.
Pode-se então armazená-la para uso posterior.
Um esquema idêntico, usando agora apenas a matriz – , é utilizado para obter as
colunas de que também fica armazenada.
Dispondo-se das matrizes e , o cálculo das variáveis na Equação (5.7)
resume-se em montar os vetores e contendo as perturbações que se deseja
simular e efetuar as multiplicações matriciais indicadas.
Esse esquema de solução apresenta como principal vantagem o fato de que as
matrizes e , uma vez obtidas, ficam à disposição para sucessivas
determinações do vetor , a partir de diferentes valores de e , sendo que cada
uma dessas determinações é feita de forma muito rápida, já que envolve apenas
produtos matriciais. A principal desvantagem é o enorme custo computacional em
tempo e memória necessário para obter e armazenar as matrizes e .
139
2.2.2 Obtenção Direta do Vetor
Em muitas aplicações práticas deseja-se determinar o vetor quando apenas uma
ou poucas variações ocorrem somente em um dos vetores u ou p. Nesses casos é
muito mais eficiente proceder da seguinte maneira:
Da equação (5.5), pode-se escrever:
(5.12)
Supondo, por exemplo, que ocorrerram variações apenas no vetor (isto é, ),
fica:
(5.13)
A Equação (13) pode ser reescrita da seguinte forma:
∑
(5.14)
em que
é a coluna de e é a variação ocorrida na variável .
Deve-se notar que a expressão no segundo membro da Equação (5.14) é um vetor.
Chamando de c esse vetor, tem-se:
∑
(5.15)
Se forem poucos os valores diferentes de zero, o número de colunas de
que
precisam ser calculadas é pequeno e a obtenção de c torna-se bastante rápida. A
Equação (15) fica, então:
(5.16)
Dispondo-se de em forma fatorada, o cálculo de por substituição sucessiva pode
agora ser realizado rapidamente.
Um processo idêntico seria utilizado para o caso de variações ocorrendo apenas no
vetor p (isto é ). Nesse caso, o vetor c seria dado por:
∑
(5.17)

140
As principais vantagens desse esquema de solução são sua rapidez e o pequeno
gasto em memória, que o tornam adequado para aplicações em controle e supervisão
de sistemas.
3. DETERMINAÇÃO DAS GRANDEZAS FUNCIONAIS
Uma vez calculado o vetor , as variações nas grandezas dependentes
funcionais podem ser feitas da seguinte forma:
(5.18)
Ou, utilizando-se acréscimos em lugar dos diferenciais:
(5.19)
em que , e são as matrizes jacobianas das equações h das grandezas
funcionais com relação às variáveis , e .
Como agora é conhecido e e são dados, pode-se determinar as variações
por simples multiplicações matriciais.
Alternativamente (e com maior eficiência, provavelmente), podem-se utilizar os valores
de , (dados) e (calculado) para obter os novos valores dos vetores , e
após as perturbações. Em seguida, utilizando a Equação (2), podem-se calcular
diretamente os novos valores das grandezas funcionais .
É importante ressaltar que a análise de sensibilidade só tem sentido prático quando
efetuada em conjunto com um cálculo prévio de fluxo de potência que permite obter o
estado da rede (vetores , e ) antes da ocorrência das perturbações que serão
simuladas. Se o método de solução utilizado nesse fluxo de potência for o de Newton-
Raphson muito maior será a eficiência, uma vez que nesse caso os fatores da matriz
já estarão disponíveis para a análise de sensibilidade.
Exemplo de Aplicação
Como exemplo de análise de sensibilidade, considere um sistema de três barras cujos
dados são apresentados a seguir.
Tabela 5.1: Dados das barras.
Barra Tensão (pu)
Potência Ativa (MW) Potência Reativa (MVAr)
Número Tipo Geração Carga Carga
1 V 1,05 - 0,00 0,00
2 PQ - 0,00 53,00 17,00
3 PQ - 0,00 37,00 15,35

141
Tabela 5.2: Dados das linhas e transformadores.
Barra Resistência (pu) Reatância (pu) Susceptância (pu) Tap (pu)
Emissora Receptora
1 2 0,0800 0,370 - 0,91
1 3 0,1230 0,518 0,183 -
2 3 0,0970 0,407 0,115 -
As Tabelas 5.3 e 5.4, a seguir, apresentam os resultados de uma análise de fluxo de
potência para o sistema em questão.
Tabela 5.3: Resultados das barras.
Barra Tensão Pot. Gerada Pot. Consumida
Número Tipo Módulo
(pu)
Ângulo
(Grau)
Ativa
(MW)
Reativa
(MVAr)
Ativa
(MW)
Reativa
(MVAr)
1 V 1,05 0,0 93,93 18,19 0,0 0,0
2 PQ 1,04 -9,36 0,0 0,0 53,0 17,0
3 PQ 1,02 -9,79 0,0 0,0 37,0 15,35
Tabela 5.5: Resultados dos circuitos.
Barra Potência
Ativa (MW) Perda
(MW)
Potência
Reativa
(MVAr) Perda
(MVAr)
Potência
Aparente
(MVA)
Emissora Receptora Emitida Emitida Emitida
1 2 55,0 2,51 27,2 11,60 64,6
1 3 35,3 1,39 -9,0 -13,70 36,50
2 3 3,10 0,03 -1,40 -12,05 3,40
Os vetores de controle, de estado e de cargas para o sistema são dados a seguir:
Foram escolhidas como variáveis de controle o módulo da tensão na barra 1 e o tap
do transformador conectado entre as barras 1 e 2. Como não existem cargas na barra
1, essas variáveis não foram incluídas no vetor p.
O vetor das equações de equilíbrio de potência nas barras é dado por:
[
]
Dessa forma, as três matrizes jacobiana , e terão a seguinte estrutura:

142
[
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
]
[
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
]
[
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
⁄
]
As equações dos desvios de potências ativa e reativa nas barras são dadas por:
Logo, os termos da matriz são dados por:
( )

143
(
)
( )
( )
(
)
( )
Na matriz , os únicos termos que não são nulos são aqueles dados por
⁄ e
⁄ , os quais são iguais -1.
A matriz jacobiana é mesma utilizada no cálculo de fluxo de potência.
Substituindo os valores de ângulos e módulos das tensões, encontra-se:
[
]
[
]
[
]
Logo, as matrizes e são dadas por:
( ) [
]

144
( ) [
]
Com as matrizes e pode-se agora efetuar a análise de sensibilidade.
Considere, por exemplo, que se deseja saber o novo estado operativo do sistema para
um aumento de 5% na carga em todas as barras. Neste caso o vetor e
[
]
considerando uma potência base de 100 MVA.
O vetor das alterações nas variáveis de estado será:
[
] [
]
E o novo vetor de estado do sitema é
[
] [
]

CAPÍTULO 6 – PREVISÃO DE
CARGA EM SISTEMAS
ELÉTRICOS DE POTÊNCIA
1. INTRODUÇÃO
É de conhecimento dos engenheiros envolvidos com o planejamento e operação de
sistemas elétricos de potência que grandes blocos de energia elétrica não podem ser
armazenados de forma eficiente. Devido ao fato de que a carga elétrica só pode ser
controlada pelas concessionárias de energia elétrica em uma pequena faixa ( grandes
variações da carga em curtos intervalos de tempo são difíceis, ou até mesmo
impossível, de serem atendidas), as atividades de previsão de carga se tornam um
tópico de grande interesse e importância para a geração e transmissão de energia
elétrica.
A operação diária e as atividades de planejamento de uma concessionária de energia
elétrica requerem a previsão de demanda de seus consumidores. Em geral, a previsão
de carga pode ser dividida em quatro tipos:
Previsão de curtíssimo prazo;
Previsão de curto prazo;
Previsão de médio prazo;
Previsão de longo prazo.
Na previsão de curtíssimo prazo, o horizonte de interesse é de uns poucos minutos a
uma hora a frente. A previsão de curto prazo refere-se à previsão horária da carga,
i.e., das próximas 24 horas a uma semana a frente. No caso da previsão de médio
prazo, são estimados os valores horários ou os picos de carga, para um horizonte de
um a vários meses. Por fim, a previsão de longo prazo refere-se à estimativa de carga
feita para períodos de um ano. É válido salientar que esses horizontes são flexíveis,
variando de uma concessionária para outra.
Em geral, o comportamento da carga é influenciado por fatores típicos, tais como:
Influências climáticas (e.g., temperatura, velocidade do vento, umidade relativa
do ar, etc);
Hora do dia, em um dia específico da semana;
Tarifação;
Estação do ano;
Eventos especiais, tais como, decisões de campeonatos, especiais de TV, etc;
146
Fatores aleatórios desconhecidos.
Os objetivos para cada horizonte de previsão são diferentes. Na escala dos segundos,
quando são observadas variações aleatórias da carga e de pequena magnitude, o
Controle Automático de Geração (CAG) garante que a reserva de regulação atenda às
flutuações. Além disso, para permitir uma avaliação segura das condições de
operação em tempo real, o Estimador de Estados é utilizado para validar grandezas
telemedidas e estimar a magnitude de tensão e ângulo de fase em cada barra. Esses
valores podem ser utilizados para computar estimativas para a carga instantânea.
Para períodos da ordem de minutos, nos quais as variações de carga mais apreciáveis
são sentidas, a função Despacho Econômico é utilizada para garantir o atendimento
da carga de forma econômica considerando a geração disponível. Na escada de horas
e dias, as variações de carga maiores estão presentes envolvendo a entrada/saída de
unidades geradoras e o intercâmbio de potência com sistemas vizinhos (intercâmbio
entre áreas), o qual é realizado pela função de controle da gerção, tais como:
programação da geração hidráulica, coordenação hidrotérmica, pré-despacho e
programação de intercâmbios. Por fim, em intervalos de semanas, nos quais se
verificam flutuações de carga mais ampla, funções ligadas à programação energética
e manutenção de equipamentos são executadas, buscando o atendimento da carga da
forma mais econômica e segura possíveis.
Em linhas gerais, com a previsão de curtíssimo e curto prazo, o que se objetiva é atuar
no controle e operação dos sistemas de potência. Na previsão de médio e longo
prazo, os estudos visam à determinação dos novos investimentos no sistema elétrico.
As subseções seguintes abordam com mais detalhes os estudos de previsão de carga,
tendo em mente o horizonte de curto prazo.
2. CARACTERÍSTICAS DAS CARGAS EM SISTEMAS DE
ELÉTRICOS DE POTÊNCIA
As cargas de um sistema de potência são compostas por milhares de aparelhos e
dispositivos eletroeletrônicos que, quando utilizados individualmente, consomem
energia de maneira bastante aleatória. Entretanto, quando considerados em conjunto,
apresentam certos padrões de consumo que pode ser estatisticamente previstos. Tais
padrões refletem a influência de uma série de fatores cujo entendimento é essencial
para se conseguir modelos que representam as cargas do sistema com o propósito de
se realizar previsões.
Pode-se dizer que a carga total do sistema é influenciada, no horizonte de curto prazo,
por fatores classificados nas seguintes categorias:
2.1 Fatores Temporais
Existem, basicamente 3 fatores de origem temporal que influenciam diretamente o
comportamento da carga: periodicidade diária-semanal, variações sazonais e
ocorrência de feriados. A periodicidade diária-semanal é uma manifestação do ciclo de

147
trabalho-descanso da sociedade durante semanas típicas de determinada estação do
ano. As variações sazonais refletem a influência das mudanças de estação ao longo
do ano. Certas alterações no padrão de comportamento da carga são graduais, como
as que são reflexo do encurtamento/alongamento do período de luz natural ou
aumento/declínio da temperatura. Outras são abruptas, como aquelas relativas à
adoção do horário de verão, alteração significativa do nível de atividade em períodos
de férias ou início do ano escolar, etc.
Por fim, a ocorrência de feriados reflete o comportamento não rotineiro dos
consumidores e normalmente produz o efeito de reduzir os valores da carga a níveis
bem inferiores aos verificados em dias comuns. Além disso, observa-se que tal
mudança de comportamento se antecipa e se prolonga em relação à ocorrência do
feriado, produzindo um alongamento do mesmo.
2.2 Fatores Meteorológicos
As condições meteorológicas são responsáveis por mudanças significativas no
comportamento da carga. Com destaque para a temperatura e a umidade, os
seguintes fatores meteorológicos também influencia o comportamento da carga:
velocidade e direção do vento, nível de luminosidade, nebulosidade e precipitação.
2.3 Fatores Aleatórios
Nessa categoria estão os fatores de natureza aleatória que produzem alterações no
comportamento da carga sem ter relação com a base temporal ou com as condições
meteorológicas. Entre esses fatores estão: entrada/saída de grande consumidores,
greve de ampla repercussão, transmissão de programa de televisão de interesse
geral, etc. Embora a ocorrência de tais eventos possa ser prevista, seus efeitos sobre
a carga são incertos.
2.4 Fatores Determinísticos
Além dos fatores mencionados anteriormente, é reconhecido que certas ações
tomadas pelo operador do sistema têm efeitos totalmente previsíveis sobre a carga.
Essas ações de controle caracterizam a chama gerência de demanda, que
recentemente vem sendo considerada como fator de controle efetivo. Entre as ações
de controle que qualificam o gerenciamento de demanda podem ser citadas: redução
deliberada da tensão, adoção de tarifas horo-sazonais, celebração de contratos de
suprimento com previsão de condições de interrupção, hierarquização geográfica da
confiabilidade, apelo ao público, etc.

148
3. MODELOS DE CARGA
Os modelos de carga utilizado na previsão de carga de curto prazo podem ser
classificados em modelo de pico de carga e modelo de curva de carga, os quais são
detalhados a seguir.
3.1 Modelo de Pico de Carga
Nesses modelos a carga é usualmente representada pelo valor de pico horário ou
semanal, geralmente, como uma função das condições meteorológicas [1]. O fator
tempo não desempenha papel algum nesses modelos. Tipicamente, assumem a
forma:
( ) (6.1)
em que representa o valor de pico da carga, o valor médio, independente das
condições meteorológicas e ( ) a parcela da carga que varia em função das
condições meteorológicas. As variáveis meteorológicas podem incluir a temperatura
na hora do pico de carga ou uma combinação de temperaturas previstas ou históricas.
Umidade, intensidade luminosa, velocidade do vento e precipitação têm sido também
consideradas em tais modelos.
As vantagens desse modelo são sua estrutura simples e a baixa exigência de
quantidade de dados para inicialização e atualização. Os parâmetros do modelo são
estimados por meio de regressão linear e/ou não linear. As desvantagens desse
modelo são que ele não define a hora de ocorrência do pico nem fornece qualquer
informação acerca do formato da curva de carga.
3.2 Modelo de Curva de Carga
Nesse modelo a carga é descrita como uma séria temporal discreta ao longo do
intervalo de previsão. O intervalo de tempo considerado na amostragem da carga é
tipicamente uma hora, enquanto que a quantidade medida é geralmente a energia
consumida nesse intervalo em MWh.
Basicamente, existem dois tipos de modelos de curva de carga: modelo hora do dia e
dinâmico. A combinação desses dois tipos é também possível.
3.2.1 Modelo Hora do Dia
O modelo hora do dia define a carga em cada instante do período de previsão de
duração para uma série temporal. Em sua forma mais simples, esse modelo
armazena os T valores de carga baseados no comportamento prévio da carga
observada. Algumas concessionárias ainda utilizam o padrão de carga verdadeiro da
semana anterior como um modelo para prever a carga da semana corrente.
Alternativamente, um conjunto de curvas é armazenado para semanas típicas do ano,
149
e para condições meteorológicas típicas, tais como, dias úmidos, secos, nublados, que
podem ser combinados com o padrão de carga semanal mais recente para realizar a
previsão.
Um modelo típico hora do dia pode assumir a seguinte forma:
∑ ( )
(6.2)
em que a carga no instante ( ) é considerada como sendo uma soma de um número
finito de funções periódicas, senos e cossenos de período de 24 ou 168 horas,
dependendo do horizonte de previsão. Os coeficientes são os parâmetros do
modelo e representa o erro da modelagem, admitido ser um ruído branco
(sequência de erros aleatórios com média e variância constantes e sem
autocorrelação). Os parâmetros estimados por meio de regressão linear simples ou
alisamento exponencial com base num histórico de carga { }, sendo é
um intervalo de tempo que cobre o passado recente da carga [2].
A vantagem desse modelo é que o mesmo é estruturalmente simples. Por outro lado,
a adaptabilidade desse modelo é baseada em parâmetros de ajustes arbitrários e que
geralmente não se modificam após a calibração inicial, o que faz com que previsões
insatisfatórias sejam obtidas para condições não usuais.
3.2.2 Modelo Dinâmico
O modelo dinâmico reconhece o fato de que a carga não é apenas uma função do
parâmetro tempo, mas também, função de entradas de informação meteorológica e de
entradas aleatórias. O modelo dinâmico é basicamente de dois tipos: modelos de Box
& Jenkins e modelos de Espaço de Estados.
4. TÉCNICAS DE PREVISÃO DE CARGA
As técnicas de previsão de carga podem ser divididas em convencionais e não
convencionais. As técnicas convencionais são aquelas baseadas em modelos
estatísticos clássicos, dentre os quais podem ser destacados: modelo de séries
temporais e modelo de regressão.
No modelo de séries temporais, a previsão é baseada em valores passados de uma
variável e/ou erros de previsão passados. O objetivo desse modelo é reconhecer ou
identificar um padrão contido nos dados disponíveis e extrapolá-lo em direção ao
futuro. No modelo de regressão, considera-se que as variáveis a serem previstas têm
uma relação causa-efeito com uma ou mais variáveis independentes. O objetivo desse
modelo é descobrir a forma dessa provável relação e utilizá-la para prever as variáveis
dependentes por meio da utilização de valores futuros das variáveis independentes.
As técnicas não convencionais de previsão apresentam-se como uma alternativa
àquelas baseadas nos modelos estatísticos clássicos. Uma característica marcante

150
dessas técnicas é sua adaptabilidade frente às alterações do ambiente onde se
realizam as previsões. Os Sistemas Especialistas e as Redes Neurais Artificiais são
dois exemplos clássicos de técnicas não convencionais de previsão que têm sido
largamente empregadas nessa última década.
4.1 Métodos Convencionais
Nesta subseção serão apresentados, de forma sucinta, os métodos estatísticos mais
utilizados para a solução do problema de previsão de carga de curto prazo [3].
4.1.1 Modelos Baseados em Regressão
A análise de regressão visa quantificar como uma variável de resposta (ou
dependente) está relacionada com o conjunto de variáveis independentes (ou
preditoras). Por exemplo, a carga do sistema pode ser estimada a com base em
variáveis preditoras tais como variáveis climáticas e não climáticas que influenciam a
carga elétrica.
Em sua forma mais geral, o modelo de regressão pode ser escrito como:
( ) (6.3)
em que ( ) é uma função das variáveis independentes [
] e
dos parâmetros desconhecidos e é a série temporal. O modelo
em (6.3) é probabilístico, uma vez que o erro é uma variável aleatória. Admite-se
que os erros são correlacionados. Devido à natureza aleatória do erro, a variável
independente também é uma variável aleatória.
Uma objeção à utilização do método regressão é que ele requer um número muito
grande de dados para a estimação dos parâmetros do modelo. Essa metodologia
também requer uma extensa análise off-line e a exatidão dos resultados depende
fortemente do modelo inicialmente assumido.
4.1.2 Modelo de Alisamento Exponencial
No modelo de alisamento exponencial, assume-se que os valores extremos da série
representam a aleatoriedade e, assim, por meio do alisamento desses extremos pode-
se identificar o padrão básico.
Em geral, esses modelos são assumem a seguinte forma matemática:
( ) (6.4)
151
em que ( ) é uma função do tempo , os coeficientes são os parâmetros
desconhecidos e são erros não correlacionados.
Por meio da escolha apropriada das funções de ajuste ( ), pode-se representar uma
variedade de séries sazonais e não sazonais. Essas funções podem também
representar a tendência de comportamento da série. No caso da carga elétrica ( ) é
usualmente um função polinomial do tempo. Dentre os vários modelos de alisamento
exponencial podem ser citados:
Modelo para séries localmente constantes: Média Móvel Simples e
Alisamento Exponencial Simples;
Modelo para séries que apresentam tendência: Alisamento Exponencial
Linear de Brown, Método de Holt-2 parâmetros, Alisamento Exponencial
Quadrático de Brown;
Modelo para séries sazonais: Alisamento Exponencial Sazonal de Holt-
Winters e Alisamento Exponencial Geral (método de Brown).
Mais esclarecimento sobre esses métodos podem ser encontrados nas referências [4]
e [5]. Com relação aos modelos de alisamento exponencial as seguintes desvantagens
devem ser mencionadas: os erros do modelo ajustado são serialmente
correlacionados – é difícil saber quantos harmônicos devem ser ajustados para uma
determinada série temporal sazonal; problemas quanto à utilização de uma única
constante de alisamento; além disso, a exatidão das previsões depende fortemente da
constante de alisamento.
4.1.3 Séries Temporais Estocásticas (Modelos Box & Jenkins)
Essa metodologia é baseada na análise dos dados, i.e., permite-se que os dados
gerem o modelo a ser utilizado, embora, ainda requerendo conhecimento e
experiência do analista.
Basicamente, a metodologia Box & Jenkins assume que qualquer série temporal
estacionária pode ser modelada parcimoniosamente por uma classe de modelos
lineares. A aplicação do método uma série qualquer é feita em quatro etapas distintas,
a saber:
a) Identificação do(s) modelo(s) para a série;
b) Estimação dos parâmetros do modelo identificado;
c) Testes estatísticos para a verificação da adequabilidade do modelo;
d) Previsão dos valores futuros da série.
Cada uma dessas etapas requer intervenção e análise do usuário, onerando o custo
de utilização do mesmo, muito embora, já existam versões automáticas. Dada a
natureza linear dos demais métodos, estes podem ser considerados casos particulares
do método de Box & Jenkins. Por esta razão, o usuário deve, sempre que possível,

152
utilizar esta metodologia em detrimento das outras, apesar do seu maior custo de
utilização. A seguir, serão analisados os modelos ARMA (Autoregressive Moving
Average) e os modelos de Função de Transferência e Box & Jenkins.
Modelos ARMA e ARIMA
No processo ARMA, o valor corrente da série temporal é função linear de seus
valores nos períodos anteriores ( ) e dos valores correntes e anteriores de
um ruído brando ( ). Um processo ARMA de ordem e pode ser escrito
da seguinte forma:
(6.5)
Introduzindo-se o operador de atraso que define , e consequentemente,
a equação (6.5) pode ser reescrita da seguinte forma:
( ) ( ) (6.6)
em que:
( ) (6.7)
é o polinômio AR simples de grau “ ”;
( )
(6.8)
é o polinômio MA simples de grau “ ”, e é o ruído branco.
A identificação dos parâmetros de um modelo ARMA é uma tarefa
computacionalmente intensiva. Entretanto, esse esforço é necessário com a finalidade
de se obter um modelo mais robusto que incorpore os efeitos dinâmicos, climáticos e
aleatórios [2].
Um problema com os modelos de Box & Jenkins descritos anteriormente é que as
informações meteorológicas não são incluídas explicitamente, i.e, como entradas do
modelo. Modelos que não incluem as informações meteorológicas, automaticamente
atualizam alguns parâmetros para levar em consideração o efeito das variações
meteorológicas na carga. Essa abordagem, entretanto, não é satisfatória durante
mudanças rápidas das condições climáticas sob as quais a hipótese de que o
processo de carga é estacionário não é vais válido.
4.2 Métodos Não Convencionais
Durante as últimas décadas, vários artigos trabalhos abordando a previsão de carga
têm sido desenvolvidos. Alguns deles contam com sofisticados modelo que, de certa
153
forma, dependem da forma da curva de carga e de variáveis como temperatura,
umidade, velocidade do vento, nebulosidade, entre outros. Apesar de que todas essas
informações possam ser extraídas e atualizadas automaticamente, por meio
estatísticas aplicadas ao histórico disponível, os modelos tradicionais de carga base
utilizam abordagens que são inflexíveis às várias mudanças no comportamento do
consumidor.
Surge então, a necessidade de se conceber técnicas que não estejam somente
baseadas em análises matemáticas complexas, mas que também possuam a
capacidade de adaptação frente a alterações do ambiente onde se realizam as
previsões.
Essas considerações, e o fato de que num passado recente “previsores humanos”
terem gerado resultados aceitáveis, permitiram o desenvolvimento de ferramentas
baseadas na emulação do conhecimento, experiência, e lógica do especialista
humano, por meio do desenvolvimento dos Sistemas Especialistas.
Outra metodologia que se tem destacado bastante ultimamente é aquela baseada em
Redes Neurais Artificiais (RNA). Essa abordagem tem alcançado sucesso na
modelagem de séries temporais, devido a sua capacidade de adaptação a conjuntos
de dados com diferentes características, muito além dos modelos lineares tradicionais.
Além disso, tem-se mostrado extremamente robusta no tratamento das correlações
existentes entre as variáveis e as interdependências empíricas entre as diferentes
sequências temporais. Uma abordagem mais detalhada sobre a utilização das RNA
para a previsão de carga de curto prazo pode ser encontrada na referência [6].
5. REFERÊNCIAS
[1] T. N. Goh, H. L. Ong and Y. O. Lee, “A New Approach to Statistical Forecasting of
Daily Peak Demand”, Electric Power System Research, Vol. 10, No. 2, pp. 145-
148, March 1986.
[2] Schweppe, Uncertain Dynamic Systems. Englewood Cliffs, NJ, 1973.
[3] IEEE Committee Report, “Load Forecasting Bibliography Phase II”, IEEE
Transactions on Power Apparatus and Systems, Vol. PAS-100, no. 7, pp. 3217-
3220, July 1981.
[4] B. Abraham and J. Ledolter, Statistical Methods for Forecasting, John Wiley &
Sons, 1983.
[5] P. J. Brockwell and R. A. Davis, Introduction to Time Series and Forecasting,
Springer-Verlag, New York, 1996.
[6] A. J. Rocha Reis, Previsor Neural de Carga Elétrica Baseado em Análise de
Multiresolução via Wavelets e Técnicas de Reconstrução do Espaço-Fase, Tese
de Doutorado, Universidade Federal de Itajubá, novembro de 2003.