AVALIAÇÃO DE OSCILAÇÕES DE ULTRABAIXA FREQUÊNCIA DE...
45
AVALIAÇÃO DE OSCILAÇÕES DE ULTRABAIXA FREQUÊNCIA DE UNIDADES ANCORADAS NO CONSUMO DE VIDA A FADIGA DE LINHAS DE ANCORAGEM Lucas Tabosa Evangelista Projeto de Graduação apresentado ao Curso de Engenharia Naval e Oceânica da Escola Politécnica, Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Engenheiro. Orientador: Carl Horst Albrecht, D.Sc. Rio de Janeiro Outubro de 2017
Transcript of AVALIAÇÃO DE OSCILAÇÕES DE ULTRABAIXA FREQUÊNCIA DE...
AVALIAÇÃO DE OSCILAÇÕES DE ULTRABAIXA FREQUÊNCIA DE
UNIDADES ANCORADAS NO CONSUMO DE VIDA A FADIGA DE
LINHAS DE ANCORAGEM
Lucas Tabosa Evangelista
Projeto de Graduação apresentado ao Curso de
Engenharia Naval e Oceânica da Escola
Politécnica, Universidade Federal do Rio de
Janeiro, como parte dos requisitos necessários à
obtenção do título de Engenheiro.
Orientador: Carl Horst Albrecht, D.Sc.
Rio de Janeiro
Outubro de 2017
ii
AVALIAÇÃO DE OSCILAÇÕES DE ULTRABAIXA FREQUÊNCIA DE
UNIDADES ANCORADAS NO CONSUMO DE VIDA A FADIGA DE
LINHAS DE ANCORAGEM
Lucas Tabosa Evangelista
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO
CURSO DE ENGENHARIA DE PETRÓLEO DA ESCOLA
POLITÉCNICA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A
OBTENÇÃO DO GRAU DE ENGENHEIRO NAVAL E OCEÂNICO.
Examinado por:
Orientador: Prof.Carl Host Albrecht, D.Sc.
Prof. Severino Fonseca da Silva Neto, D.Sc.
Prof. Mauro Henrique Alves de Lima Junior, D.Sc.
RIO DE JANEIRO – RJ – BRASIL
OUTUBRO DE 2017

iii
Evangelista, Lucas Tabosa
Avaliação de Oscilações de Ultrabaixa Frequência de
Unidades Ancoradas no Consumo de Vida a Fadiga de Linhas
de Ancoragem/ Lucas Tabosa Evangelista. – Rio de Janeiro:
UFRJ/Escola Politécnica, 2017.
X, 31 p.: il.; 29,7 cm.
Orientador: Carl Host Albrecht
Projeto de Graduação – UFRJ/POLI/Engenharia Naval e
Oceânica, 2017.
Referências Bibliográficas: p.34
1. Consumo da Vida à Fadiga. 2. Análise Estática. 3. Sistemas de
Ancoragem de Plataformas de Produção de Petróleo. I. Albrecht, Carl
Horst. II. Universidade Federal do Rio de Janeiro, Escola Politécnica,
Curso de Engenharia Naval e Oceânica. III. Avaliação de Oscilações
de Ultrabaixa Frequência de Unidades Ancoradas no Consumo de Vida
a Fadiga de Linhas de Ancoragem

iv
AGRADECIMENTOS
Aos meus pais Flavio e Regina, por me criarem com amor e carinho,
compartilharem comigo sua sabedoria e providenciarem todo o necessário para a vida
maravilhosa que tenho hoje.
Aos meus irmãos Antônio, Luisa e Pryscilla, por serem meus companheiros na
jornada da vida e sempre estarem ao meu lado; aos meus avós Sarah e Emilson, por
fazerem parte de minha criação e me presentearem com seu carinho e a todos os meus
familiares.
Ao meu professor orientador Carl Albrecht, por ter sido um orientador e um amigo
presente e altamente comprometido.
Ao Laboratório de Métodos Computacionais e Sistemas Offshore (LAMCSO) da
COPPE/UFRJ, pela disponibilização do sistema SITUA/PROSIM para realização deste
projeto e à Petrobrás, pelo fornecimento dos dados usados no mesmo.
Aos meus colegas de curso Bernardo Kahn, Liad Paskin, Diana Moreira e
Nicholas Barbosa, por serem os melhores companheiros de faculdade que eu poderia ter
e por tornarem cada um dos trabalhos em experiências maravilhosas e agregadoras.
Aos meus melhores amigos Leandro Avelar, Lucas Falcão, Heitor Bernardes,
Francisco Bernardes e João Paulo, por transcenderem o papel de amigos e me
presentearem com sua amizade, carinho e sabedoria todos os dias.
A Leticia Antunes, por ser uma das pessoas mais especiais na minha vida, me
incentivar em momentos difíceis e me presentear com seu carinho todos os dias.
Ao Curso de Engenharia Naval e Oceânica da UFRJ, por fornecerem todo o
conhecimento necessário para minha formação como Engenheiro Naval.

v
Resumo do Projeto de Graduação apresentado à Escola Politécnica/UFRJ como parte dos
requisitos necessários para a obtenção do grau de Engenheiro Naval e Oceânico.
Avaliação de Oscilações de Ultrabaixa Frequência de Unidades Ancoradas no Consumo
de Vida a Fadiga de Linhas de Ancoragem
Lucas Tabosa Evangelista
Outubro/2017
Orientador: Carl Host Albrecht, D.Sc.
Curso: Engenharia Naval e Oceânica
Este trabalho pretende avaliar o dano na vida a fadiga gerado por oscilações de ultrabaixa
frequência no sistema de ancoragem de uma unidade de produção de petróleo em
funcionamento na Bacia de Campos, através da análise dos dados de movimentação
medidos em campo. Foram analisados os registros de posição gravados por GPS de um
ano de movimentação de um FPSO e identificado um dia com dados satisfatórios. Estes
dados foram filtrados para identificação de oscilação de baixa frequência. Foi assumido
que o fenômeno de variação de tração era um fenômeno estático, então as trações nas
linhas de ancoragem foram calculadas de forma analítica utilizando o programa de análise
de trações SITUA/Prosin. O dano referente a esta variação de tração foi considerado na
avaliação do cálculo da vida a fadiga das linhas de ancoragem, calculando-se a
porcentagem de dano causado por oscilações de ultrabaixa frequência em relação ao dano
comumente calculado em projeto, os quais oscilações de ultrabaixa frequência não são
consideradas.

vi
Abstract of the Course Conclusion Project presented to the Department of Naval and
Oceanic Engineering of the Polytechnic School as a partial fulfillment of the requirements
for the degree of Bachelor in Naval and Oceanic Engineering (B.Sc.)
Evaluation of Ultra Low Frequency Oscillations of Anchored Units in Fatigue Life
Consumption of Anchor Lines
Lucas Tabosa Evangelista
October/2017
Advisor: Carl Host Albrecht, D.Sc.
Course: Engenharia Naval e Oceânica
This work aims to evaluate the damage in fatigue life generated by oscillations of ultralow
frequency in the anchorage system of a petroleum production unit operating in the
Campos Basin, by analyzing the movement of data measured in the field. The position
data, recorded by GPS of one year of FPSO movement, was analyzed and it was identified
one day with satisfactory data. These data was filtered to identify low frequency
oscillation. It was assumed that the tension variation was a static phenomenon, and then
the tensions in the anchor lines were calculated analytically using the tension analysis
program SITUA / Prosin. The damage related to this traction variation was considered in
fatigue life calculation of the anchor lines, calculating the percentage of damage caused
by ultralow frequency oscillations in relation to the damage commonly calculated in
design, which does not consider ultralow frequency motions.
vii
Sumário
1. Introdução ................................................................................................................. 1
1.1. Contexto e motivação ........................................................................................... 1
1.2. Objetivo ................................................................................................................ 1
2. Sistema de ancoragem .............................................................................................. 2
2.1. Configuração das linhas........................................................................................ 2
2.1.1. Convencional ........................................................................................................ 2
2.1.2. Taut leg ................................................................................................................. 3
2.1.3. Vertical ................................................................................................................. 3
2.2. Tipos de ancoragem .............................................................................................. 4
2.2.1. Spread mooring .................................................................................................... 4
2.2.2. Turret .................................................................................................................... 5
2.2.3. Catenary anchor leg mooring (calm) .................................................................... 6
2.2.4. Single anchor leg mooring (salm) ........................................................................ 7
2.3. Componentes ........................................................................................................ 8
2.3.1. Amarras ................................................................................................................ 8
2.3.2. Cabos de aço ....................................................................................................... 10
2.3.3. Cabos de materiais sintéticos .............................................................................. 11
2.3.4. Âncoras ............................................................................................................... 12
3. Base teórica............................................................................................................. 13
3.1. Fadiga ................................................................................................................. 13
3.2. Acúmulo linear de danos .................................................................................... 14
3.3. Contagem de ciclos ............................................................................................. 15
3.4. Curva t-n para elos de amarras e cabos de aço ................................................... 17
3.5. Média móvel simples .......................................................................................... 19
viii
4. Metodologia ............................................................................................................ 20
4.1. Dados de entrada ................................................................................................ 20
4.2. Filtragem dos dados ............................................................................................ 21
4.3. Programa situa/prosim ........................................................................................ 24
4.4. Modelo numérico ................................................................................................ 25
5. Resultados ............................................................................................................... 28
5.1. Cálculo do dano anual ........................................................................................ 28
5.2. Avaliação do dano na vida útil a fadiga ............................................................. 31
6. Conclusão e trabalhos futuros................................................................................. 33
7. Referências ............................................................................................................. 34

ix
Sumário de Imagens
FIGURA 1 - ANCORAGEM CONVENCIONAL ..................................................................................... 2
FIGURA 2 - ANCORAGEM TAUT LEG ............................................................................................... 3
FIGURA 3 - SISTEMA DE ANCORAGEM VERTICAL ........................................................................... 4
FIGURA 4 - ANCORAGEM SPREAD MOORING .................................................................................. 4
FIGURA 5 - TURRET EXTERNO ........................................................................................................ 5
FIGURA 6 - TURRET INTERNO ......................................................................................................... 5
FIGURA 7 - SISTEMA CALM COM CABOS ......................................................................................... 6
FIGURA 8 - SISTEMA CALM COM ESTRUTURA ................................................................................ 6
FIGURA 9 - SISTEMA SALM COM BOIAS DE FLUTUAÇÃO ................................................................ 7
FIGURA 10 - SISTEMA SALM COM RISER PRÉ-TRACIONADO ........................................................... 7
FIGURA 11 - AMARRAS FORMADAS POR ELOS COM MALHETE ....................................................... 8
FIGURA 12 - ELO COMUM COM MALHETE ...................................................................................... 9
FIGURA 13 - ELO COMUM SEM MALHETE ....................................................................................... 9
FIGURA 14 - ELO KENTER ............................................................................................................... 9
FIGURA 15 - DETALHE DO ARRANJO DE CABOS DE AÇO ............................................................... 10
FIGURA 16 - TIPOS DE CONFIGURAÇÕES PARA CABOS DE AÇO .................................................... 11
FIGURA 17 - CONFIGURAÇÃO DE CABOS DE POLIÉSTER ............................................................... 11
FIGURA 18 – CURVA S-N [2] ......................................................................................................... 13
FIGURA 19 - ESPECTRO DE CARREGAMENTO [4] .......................................................................... 14
FIGURA 20 - PARÂMETROS BÁSICOS DO MÉTODO RAINFLOW [5] ................................................ 15
FIGURA 21 - FLUXOGRAMA DO MÉTODO RAINFLOW ................................................................... 16
FIGURA 22 - EXEMPLO DO MÉTODO RAINFLOW [5] ...................................................................... 17
FIGURA 23 - CURVA T-N PARA DIFERENTES TIPOS DE ELOS DE AMARRAS E CABOS DE AÇO ........ 19
FIGURA 24 - GRÁFICO DAS COORDENADAS DE X PELO TEMPO ..................................................... 22
FIGURA 25 - GRÁFICO DA MÉDIA MÓVEL DE 600S ....................................................................... 23
FIGURA 26 - GRÁFICO DA MÉDIA MÓVEL DE 3600S ..................................................................... 23
FIGURA 27 - GRÁFICO DA MÉDIA MÓVEL DE 10800S ................................................................... 24
FIGURA 28 - VISTA LATERAL DO MODELO ................................................................................... 25
FIGURA 29 - VISTA SUPERIOR DO MODELO .................................................................................. 26
FIGURA 30 - VISTA EM PROFUNDIDADE DO MODELO ................................................................... 27
FIGURA 31 - LINHA DE ANCORAGEM EM CATENÁRIA .................................................................. 27
FIGURA 32 - CONFIGURAÇÃO DAS LINHAS DE ANCORAGEM ........................................................ 28
FIGURA 33 - GRÁFICO DO DANO ANUAL X CICLOS DIÁRIOS ........................................................ 31
FIGURA 34 - PORCENTAGEM DE DANO DESCONSIDERADA AO LONGO DA VIDA ÚTIL POR CICLOS
DIÁRIOS ............................................................................................................................... 32
x
Sumário de Tabelas
TABELA 1 - VALORES DE M E K DE ACORDO COM A API ............................................................... 18
TABELA 2 - CORRELAÇÃO ENTRE AS COORDENADAS DE POSIÇÃO .............................................. 22
TABELA 3 - TABELA COM VALORES DE TRAÇÕES PARA X E Y MÁXIMOS ..................................... 28
1
1. Introdução
1.1. Contexto e Motivação
Devido à grande demanda da indústria por produtos derivados do petróleo e o grande
potencial das reservas de petróleo encontradas na costa brasileira, a bacia de campos,
compreendida entre as imediações da cidade de Vitória (ES) e da cidade de Cabo Frio (RJ) e
com cerca de 116.000 km², vem sendo explorada nos últimos anos e algumas das unidades de
produção instaladas no local estão próximas do seu período de vida útil para qual foram
projetadas. Durante o período de operação, as estruturas das unidades sofrem carregamentos
cíclicos contínuos, carregamentos esses que não são exatamente idênticos aos previstos quando
a unidade foi projetada, consumindo assim a vida a fadiga das estruturas em ritmo diferente do
projetado.
Portanto, é justificável a preocupação quanto ao cálculo da vida a fadiga remanescente
das estruturas quando seu tempo de operação está próximo da vida útil planejada. Entretanto,
em muitas análises de consumo da vida em fadiga, os cálculos considerados são apenas para
carregamentos cíclicos com frequências que giram em torno da frequência de incidência de
ondas na plataforma. No entanto, percebe-se pelos dados de medição da posição da plataforma
que há movimentos com longos períodos de oscilação e trações mais elevadas que não são
levadas em consideração na análise da vida a fadiga.
1.2. Objetivo
O objetivo do presente trabalho é a determinação da relevância de carregamentos
cíclicos de ultrabaixa frequência no consumo da vida a fadiga em linha de ancoragem de uma
plataforma de produção de petróleo na bacia de campos, considerando os carregamentos reais
medidos ao longo da vida da unidade.
2
2. Sistema de Ancoragem
O sistema de ancoragem é o conjunto de equipamentos que ligam a embarcação com o
fundo do mar e evitam que a embarcação fique à deriva, restringindo seu passeio a determinada
área. Esse sistema é constituído âncoras, cabos de aço ou poliéster e de amarras de aço e ser
configurado de diversas formas diferentes, dependendo do tipo de embarcação e do tipo de
forças ambientais ela irá enfrentar, configurações essas mostradas nas seções que se sucedem.
2.1. Configuração das linhas
2.1.1. Convencional
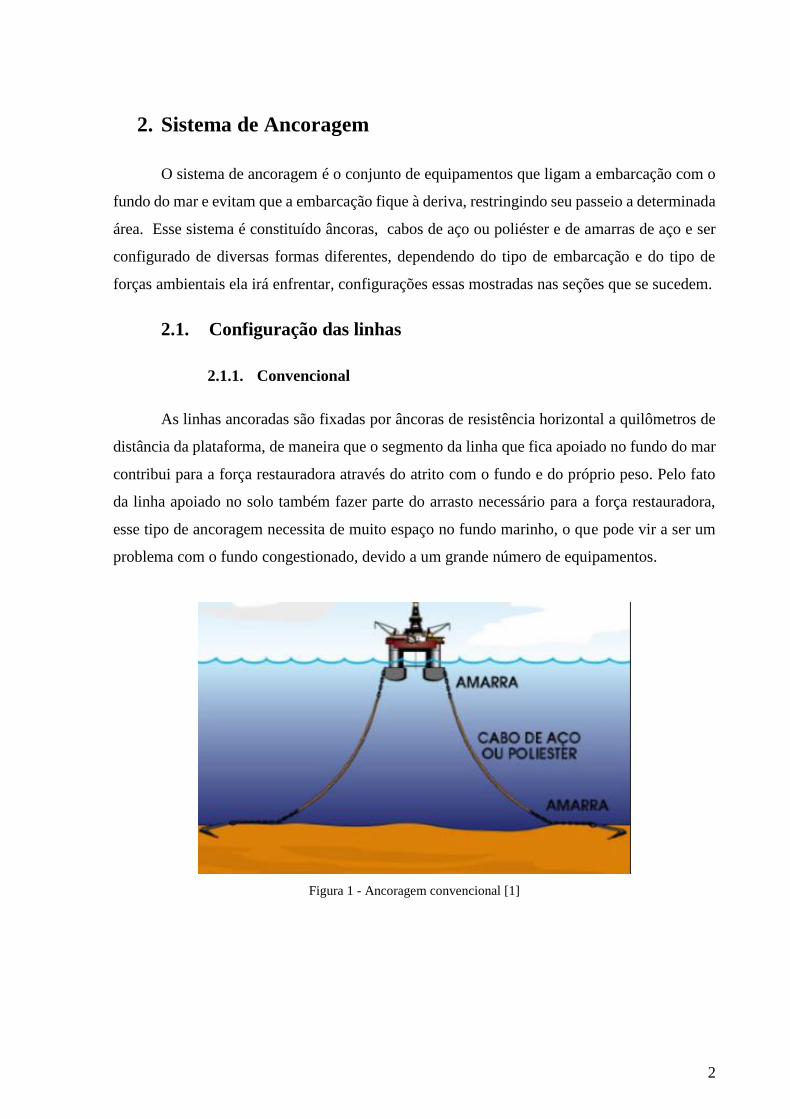
As linhas ancoradas são fixadas por âncoras de resistência horizontal a quilômetros de
distância da plataforma, de maneira que o segmento da linha que fica apoiado no fundo do mar
contribui para a força restauradora através do atrito com o fundo e do próprio peso. Pelo fato
da linha apoiado no solo também fazer parte do arrasto necessário para a força restauradora,
esse tipo de ancoragem necessita de muito espaço no fundo marinho, o que pode vir a ser um
problema com o fundo congestionado, devido a um grande número de equipamentos.
Figura 1 - Ancoragem convencional [1]
3
2.1.2. Taut Leg
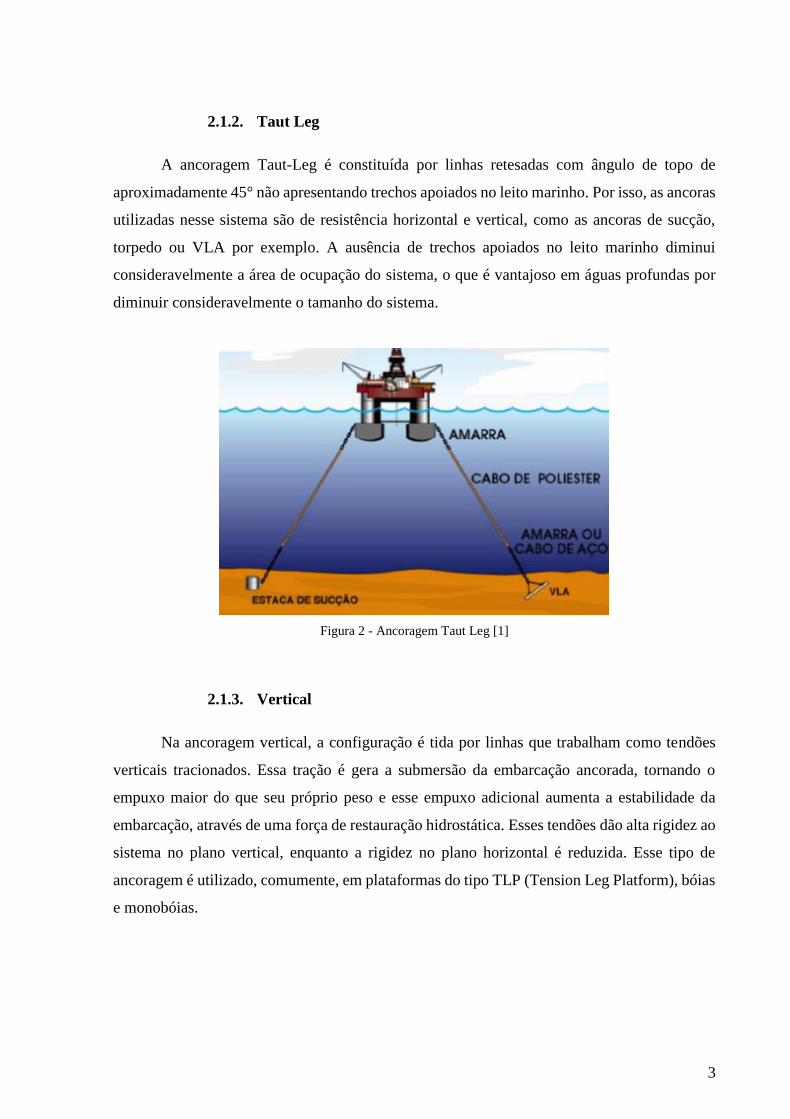
A ancoragem Taut-Leg é constituída por linhas retesadas com ângulo de topo de
aproximadamente 45° não apresentando trechos apoiados no leito marinho. Por isso, as ancoras
utilizadas nesse sistema são de resistência horizontal e vertical, como as ancoras de sucção,
torpedo ou VLA por exemplo. A ausência de trechos apoiados no leito marinho diminui
consideravelmente a área de ocupação do sistema, o que é vantajoso em águas profundas por
diminuir consideravelmente o tamanho do sistema.
Figura 2 - Ancoragem Taut Leg [1]
2.1.3. Vertical
Na ancoragem vertical, a configuração é tida por linhas que trabalham como tendões
verticais tracionados. Essa tração é gera a submersão da embarcação ancorada, tornando o
empuxo maior do que seu próprio peso e esse empuxo adicional aumenta a estabilidade da
embarcação, através de uma força de restauração hidrostática. Esses tendões dão alta rigidez ao
sistema no plano vertical, enquanto a rigidez no plano horizontal é reduzida. Esse tipo de
ancoragem é utilizado, comumente, em plataformas do tipo TLP (Tension Leg Platform), bóias
e monobóias.

4
Figura 3 - Sistema de ancoragem vertical [2]
2.2. Tipos de ancoragem
2.2.1. Spread Mooring
A ancoragem Spread mooring, também chamada de distribuída, caracteriza-se pela
distribuição simétrica das linhas de ancoragem em torno da embarcação e é mais utilizada em
plataforma do tipo semi-submersível e FPSO.
Figura 4 - Ancoragem Spread mooring [3]

5
Uma configuração especial de ancoragem foi desenvolvida pela PETROBRAS para
navios do tipo FPSO. Trata-se do sistema DICAS (Differentiated Compliance Anchoring
System). Este sistema se diferencia por utilizar linhas de ancoragem com rigidezes distintas na
proa e na popa do navio e também de angulações diferentes na proa e na popa, o que
proporciona um alinhamento parcial do navio em relação às direções dos carregamentos
ambientais mais severos.
2.2.2. Turret
Esse sistema é caracterizado pela utilização do sistema spread mooring, onde toda a
linha de ancoragem conecta-se a embarcação por meio de uma estrutura em forma de torre
(turret) que pode estar na proa ou na popa (turret externo) ou internamente ao navio (turret
interno). O casco da embarcação é conectado ao turret por meio de rolamentos e assim, ficando
livre para se alinhar aos carregamentos ambientais, sempre girando em torno do turret.
Figura 5 - Turret externo [2]
Figura 6 - Turret interno [4]

6
2.2.3. Catenary Anchor Leg Mooring (CALM)
O sistema CALM consiste de uma bóia de grandes dimensões que suporta um
determinado número de linhas de ancoragem em catenária. A amarração entre a bóia e a unidade
flutuante é feita por meio de um cabo ou através de uma estrutura fixa, chamada de Yoke.
Figura 7 - Sistema CALM com cabos [5]
Figura 8 - Sistema CALM com estrutura [2]

7
2.2.4. Single Anchor Leg Mooring (SALM)
O sistema SALM utiliza um riser vertical com grande capacidade de flutuação ou um
riser pré-tracionado. Emprega-se um riser tubular articulado, conectado à unidade através de
uma forquilha rígida, ou ainda pode-se empregar uma configuração alternativa com amarras
ligadas a uma bóia que é acoplada à unidade através de cabos.
Figura 9 - Sistema SALM com boias de flutuação [2]
Figura 10 - Sistema SALM com riser pré-tracionado [5]
8
2.3. Componentes
Linhas de ancoragem podem ter diversas configurações, sendo constituídas de apenas
um componente ou de diversos e também de materiais variados ou não. Dentre os componentes
que podem compor esse sistema estão as amarras, cabos, sendo eles de aço ou de poliéster, e
ancoras.
2.3.1. Amarras
As amarras são formadas por elos de aço ligados, fabricados a partir de barras de aço
com seção circular, que podem ser elos sem malhete (Studless) ou com malhete (Stud link),
sendo o último mais comumente usados. A classificação das amarras é feita de acordo com a
resistência ao escoamento do aço utilizado em sua fabricação e de acordo com a geometria,
considerando o diâmetro nominal da barra de aço utilizada para fabricar o elo.
Figura 11 - Amarras formadas por elos com malhete [7]
As amarras utilizadas em sistemas de ancoragem off shore são geralmente separadas em
seis categorias ou graus, que variam em escala crescente de resistência de acordo com a tração
de ruptura das mesmas (Graus 2, 3, ORQ – Oil Rig Quality, ORQ +10%, ORQ +20%, 4).
Quanto à geometria, as amarras são classificadas de acordo com o diâmetro nominal da barra
de aço utilizada para fabricar o elo.

9
Figura 12 - Elo comum com malhete [6]
Figura 13 - Elo comum sem malhete [6]
O mais comumente componente de união de duas correntes de amarras empregado é o
elo kenter. As linhas de ancoragem devem utilizar o menor número possível destes elos visto
que sua durabilidade à fadiga é sensivelmente menor à das correntes.
Figura 14 - Elo Kenter [6]
Em relação ao projeto de uma linha de ancoragem composta por amarras, a consideração
dos efeitos de fadiga é essencial especialmente quando acessórios de ligação são utilizados, que
correspondem a pontos fracos da linha. O mesmo pode ser dito nos casos de utilização de elos

10
com malhetes, pois, a solda também representa um ponto vulnerável quando sujeitos a cargas
cíclicas. Deve-se, portanto, minimizar o número de conexões em uma linha de ancoragem
composta por amarras e, quando utilizadas, considera-las como os elementos a serem estudados
da linha por serem os elementos mais suscetíveis a falhas.
2.3.2. Cabos de Aço
Os cabos de aço são formados por diversos fios de aço entrelaçados e agrupados. As
chamadas pernas são fios enrolados entre si em forma de espiral em torno de um elemento
central chamado núcleo ou alma, núcleo esse que pode ser composto por um cabo de aço
independente (Independent Wire Rope Core), uma perna de aço (Wire Strand Core) ou de fibras
naturais ou sintéticas (Fiber).
Figura 15 - Detalhe do arranjo de cabos de aço [8]
Os principais tipos de cabo de aço aplicados na área off shore são o six strand e o spiral
strand. Sendo o primeiro mais comumente utilizado em unidades de perfuração por sua facilidade
de manuseio, já o segundo é empregado e unidades de produção devido a sua resistência e
durabilidade superiores. Também há tipo multi strand que é uma versão do six strand, porém com
melhor balanceamento de torque, o que representa um meio termo entre o six strand e o spiral
strand.

11
Figura 16 - Tipos de configurações para cabos de aço [8]
É muito comum a utilização de fios galvanizados para a criação das tranças, de forma a
minimizar a corrosão durante a operação.
2.3.3. Cabos de Materiais Sintéticos
Os cabos de materiais sintéticos são formados por fios trançados, associados entre si,
formando cordas agrupadas, dando origem aos núcleos, que são dispostos em configurações
específicas. Por apresentarem custo reduzido, baixa relação massa/resistência e boa resistência
à fluência e fadiga, os cabos de materiais sintéticos mais utilizados em sistemas de ancoragem
em embarcações off shore são os de poliéster, cuja configuração pode ser vista conforme a
imagem abaixo [1]
Figura 17 - Configuração de cabos de poliéster [8]
12
Três construções de cabos são fabricadas. São elas: fios paralelos, sub-cabos paralelos
e tipo cabo de aço, tendo por objetivo manter as fibras posicionadas de tal modo que formem
pequenos ângulos em relação ao eixo do cabo.
Um aspecto relevante na utilização de cabos de poliéster, no sistema de ancoragem, é
sua baixa resistência a abrasão, o que limita a utilização destes em trechos que não estejam em
contato direto com o solo. Como solução a isso, pode-se utilizar um revestimento externo
protetor, que assegura a integridade e proteção dos núcleos contra partículas abrasivas.
2.3.4. Âncoras
A âncora é o componente responsável pela fixação das linhas de ancoragem no leito
marinho. O ponto de fixação ou ponto de ancoragem dependerá do tipo de sistema de
ancoragem utilizado visto que em alguns casos é necessário que a âncora resista a cargas
horizontais e verticais. Dentre os diversos tipos temos
i. Ancoras convencionais: Não possuem resistência a solicitações verticais e
geralmente utilizadas quando o sistema de ancoragem é do tipo spread mooring;
ii. Âncoras VLA (Vertical Load Anchor): Apresentam resistência a solicitações
vertical e horizontal e mais utilizadas em sistemas do tipo Taut Leg;
iii. Estacas de Sucção ou Estacas Caixão: São grandes tubos que funcionam como
se fosse uma câmara de pressão, sugam a areia no solo e se enterram.
Apresentam resistência a carregamentos vertical e horizontal e podem ser
utilizadas em sistemas tipo Taut Leg e Vertical;
iv. Estacas Torpedo: São torpedos lançados a 100m acima do solo marinho que
então se enterram pela ação de sua inércia. Provem resistência a solicitações
vertical e horizontal e podem ser utilizadas em sistemas Taut Leg.
13
3. Base Teórica
3.1. Fadiga
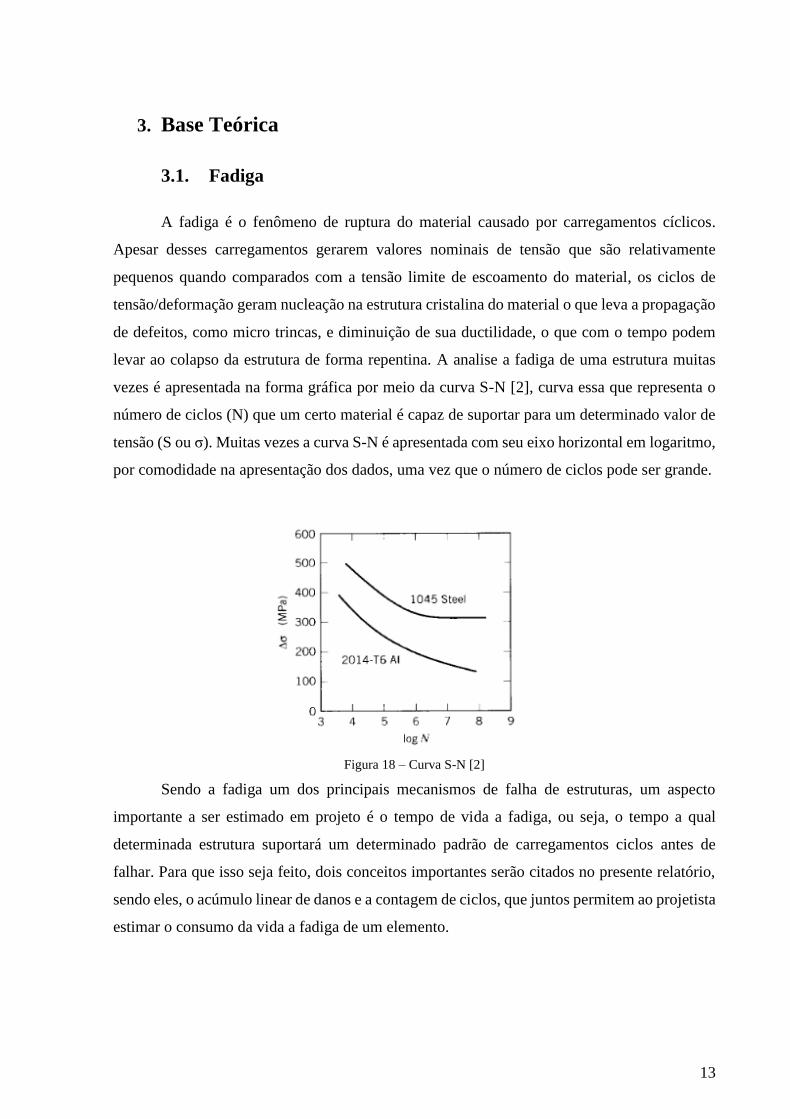
A fadiga é o fenômeno de ruptura do material causado por carregamentos cíclicos.
Apesar desses carregamentos gerarem valores nominais de tensão que são relativamente
pequenos quando comparados com a tensão limite de escoamento do material, os ciclos de
tensão/deformação geram nucleação na estrutura cristalina do material o que leva a propagação
de defeitos, como micro trincas, e diminuição de sua ductilidade, o que com o tempo podem
levar ao colapso da estrutura de forma repentina. A analise a fadiga de uma estrutura muitas
vezes é apresentada na forma gráfica por meio da curva S-N [2], curva essa que representa o
número de ciclos (N) que um certo material é capaz de suportar para um determinado valor de
tensão (S ou σ). Muitas vezes a curva S-N é apresentada com seu eixo horizontal em logaritmo,
por comodidade na apresentação dos dados, uma vez que o número de ciclos pode ser grande.
Figura 18 – Curva S-N [2]
Sendo a fadiga um dos principais mecanismos de falha de estruturas, um aspecto
importante a ser estimado em projeto é o tempo de vida a fadiga, ou seja, o tempo a qual
determinada estrutura suportará um determinado padrão de carregamentos ciclos antes de
falhar. Para que isso seja feito, dois conceitos importantes serão citados no presente relatório,
sendo eles, o acúmulo linear de danos e a contagem de ciclos, que juntos permitem ao projetista
estimar o consumo da vida a fadiga de um elemento.

14
3.2. Acúmulo Linear de Danos
O modelo de acumulo linear de danos, ou também chamado de regra de Palmgren-Miner
[3] é utilizado, juntamente com o um método de contagem de ciclos, para a estimativa da vida
a fadiga de um elemento estrutural. Considerando agora um espectro de carregamento em uma
estrutura que se desenvolve de acordo com a Figura 19 [4].
Figura 19 - Espectro de Carregamento [4]
Cada ciclo possui valor de tensão constante igual a 𝑆𝑖 e número de ciclos
correspondente 𝑛𝑖. Para cada ciclo de tensão 𝑆𝑖, há um correspondente número de ciclos 𝑁𝑖 a
qual a estrutura submetida a tensão 𝑆𝑖 colapsaria. Seja então 𝐷𝑖 o dano acumulado no ciclo de
tensão 𝑆𝑖, definido pela regra de Palmgren-Miner [3].
𝐷𝑖 = 𝑛𝑖/𝑁𝑖
Dano esse acumulado durante o ciclo de tensão 𝑆𝑖. Portanto, o dano total de todo o
espectro de carregamentos é dado pela soma de todos os danos de cada um dos 𝑘 ciclo [4].
𝐷 = ∑ 𝑛𝑖/𝑁𝑖
𝑖=𝑘
𝑖=1
De acordo com a regra a falha do elemento estrutural ocorrerá quando o dano 𝐷 for
maior que a unidade
𝐷 ≥ 1
15
3.3. Contagem de Ciclos
Dentre os diversos métodos de contagem de ciclos, o utilizado no presente trabalho será
o método Rainflow, sendo explicado brevemente a forma como a contagem é feita de acordo
com o estabelecido pela Standard Practices for Cycle Counting in Fatigue Analysis da ASTM
- American Society for Testing and Materials [5].
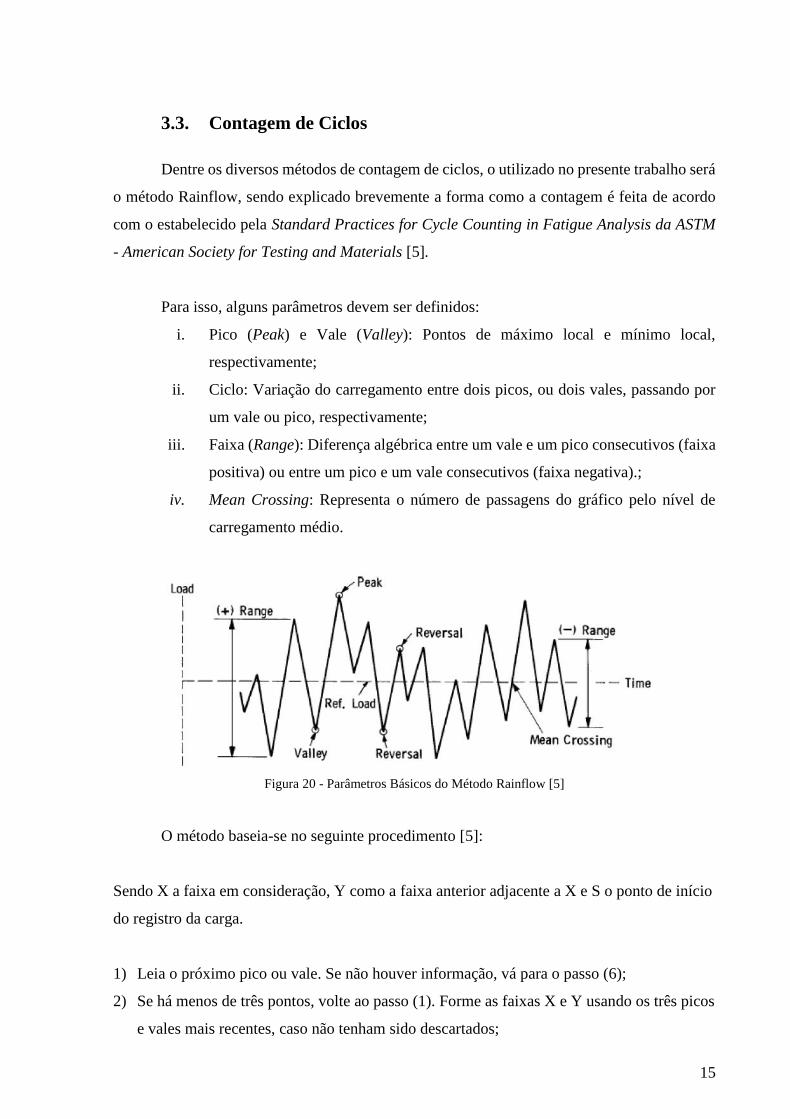
Para isso, alguns parâmetros devem ser definidos:
i. Pico (Peak) e Vale (Valley): Pontos de máximo local e mínimo local,
respectivamente;
ii. Ciclo: Variação do carregamento entre dois picos, ou dois vales, passando por
um vale ou pico, respectivamente;
iii. Faixa (Range): Diferença algébrica entre um vale e um pico consecutivos (faixa
positiva) ou entre um pico e um vale consecutivos (faixa negativa).;
iv. Mean Crossing: Representa o número de passagens do gráfico pelo nível de
carregamento médio.
Figura 20 - Parâmetros Básicos do Método Rainflow [5]
O método baseia-se no seguinte procedimento [5]:
Sendo X a faixa em consideração, Y como a faixa anterior adjacente a X e S o ponto de início
do registro da carga.
1) Leia o próximo pico ou vale. Se não houver informação, vá para o passo (6);
2) Se há menos de três pontos, volte ao passo (1). Forme as faixas X e Y usando os três picos
e vales mais recentes, caso não tenham sido descartados;

16
3) Compare os valores absolutos dos caminhos X e Y:
a. Se X < Y, vá para o passo (1).
b. Se X ≥ Y, vá para o passo (4);
4) Se a faixa Y contiver o ponto de início S, vá para o passo (5); caso contrário, conte a faixa
Y como um ciclo, descarte o pico e o vale de Y, e vá para o passo (2);
5) Conte a faixa Y como um meio-ciclo, descarte o primeiro ponto (do pico ou do vale) na
faixa Y, mova o ponto de partida para o segundo ponto da faixa Y e vá para o passo (2);
6) Conte cada faixa não contada anteriormente como um meio-ciclo.
O método acima pode ser sintetizado em forma de fluxograma para melhor
entendimento.
Figura 21 - Fluxograma do Método Rainflow
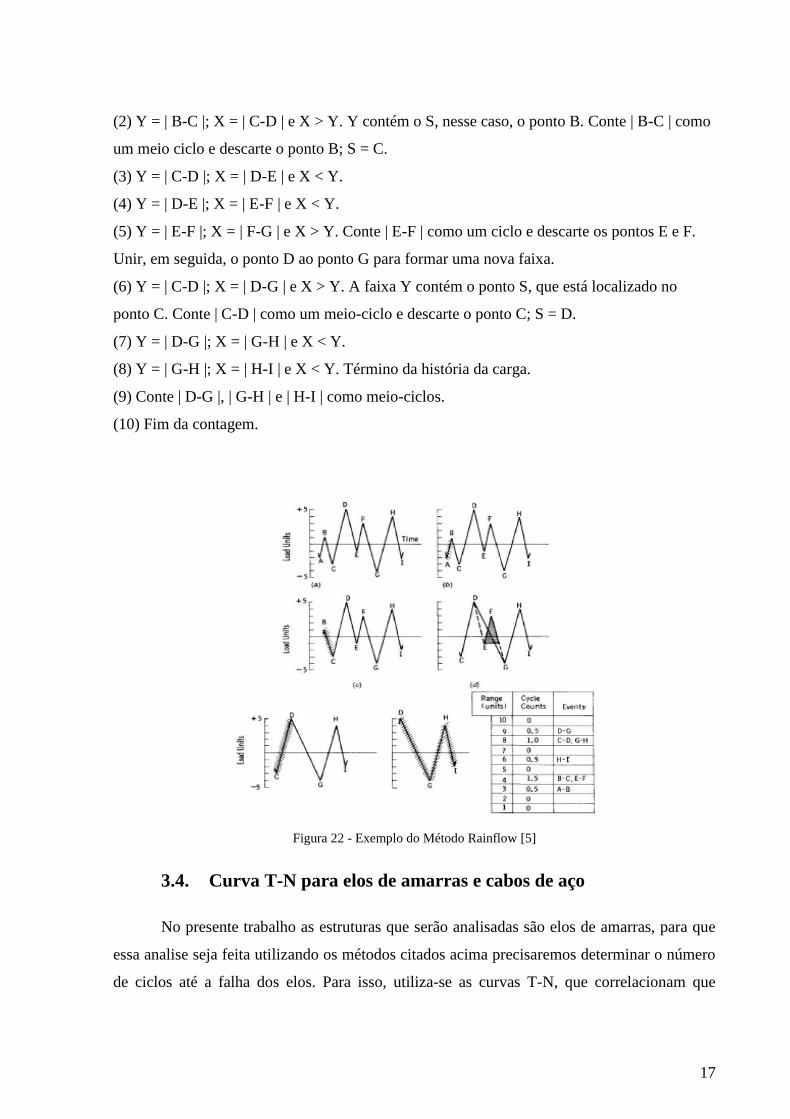
Na mesma publicação, é dado um exemplo para ilustrar esse processo e aprimorar o
entendimento do mesmo
(1) S= A; Y = | A-B |; X = | B-C | e X > Y. A faixa Y contém S, que é o ponto A. Conte | A-B
| como um meio-ciclo e descarte o ponto A; S = B.
17
(2) Y = | B-C |; X = | C-D | e X > Y. Y contém o S, nesse caso, o ponto B. Conte | B-C | como
um meio ciclo e descarte o ponto B; S = C.
(3) Y = | C-D |; X = | D-E | e X < Y.
(4) Y = | D-E |; X = | E-F | e X < Y.
(5) Y = | E-F |; X = | F-G | e X > Y. Conte | E-F | como um ciclo e descarte os pontos E e F.
Unir, em seguida, o ponto D ao ponto G para formar uma nova faixa.
(6) Y = | C-D |; X = | D-G | e X > Y. A faixa Y contém o ponto S, que está localizado no
ponto C. Conte | C-D | como um meio-ciclo e descarte o ponto C; S = D.
(7) Y = | D-G |; X = | G-H | e X < Y.
(8) Y = | G-H |; X = | H-I | e X < Y. Término da história da carga.
(9) Conte | D-G |, | G-H | e | H-I | como meio-ciclos.
(10) Fim da contagem.
Figura 22 - Exemplo do Método Rainflow [5]
3.4. Curva T-N para elos de amarras e cabos de aço
No presente trabalho as estruturas que serão analisadas são elos de amarras, para que
essa analise seja feita utilizando os métodos citados acima precisaremos determinar o número
de ciclos até a falha dos elos. Para isso, utiliza-se as curvas T-N, que correlacionam que

18
correlaciona a tração nas amarras e cabos e o número de ciclos até a falha, baseados na API
2SK [6].
𝑁 = 𝐾/𝑅𝑀
Onde:
- 𝑁 o número de ciclos até a falha;
- 𝑅 a razão entre a amplitude de tração e a tração de ruptura;
- 𝑀 𝑒 𝐾 são valores disponibilizados pela American Petroleum Institute [7].
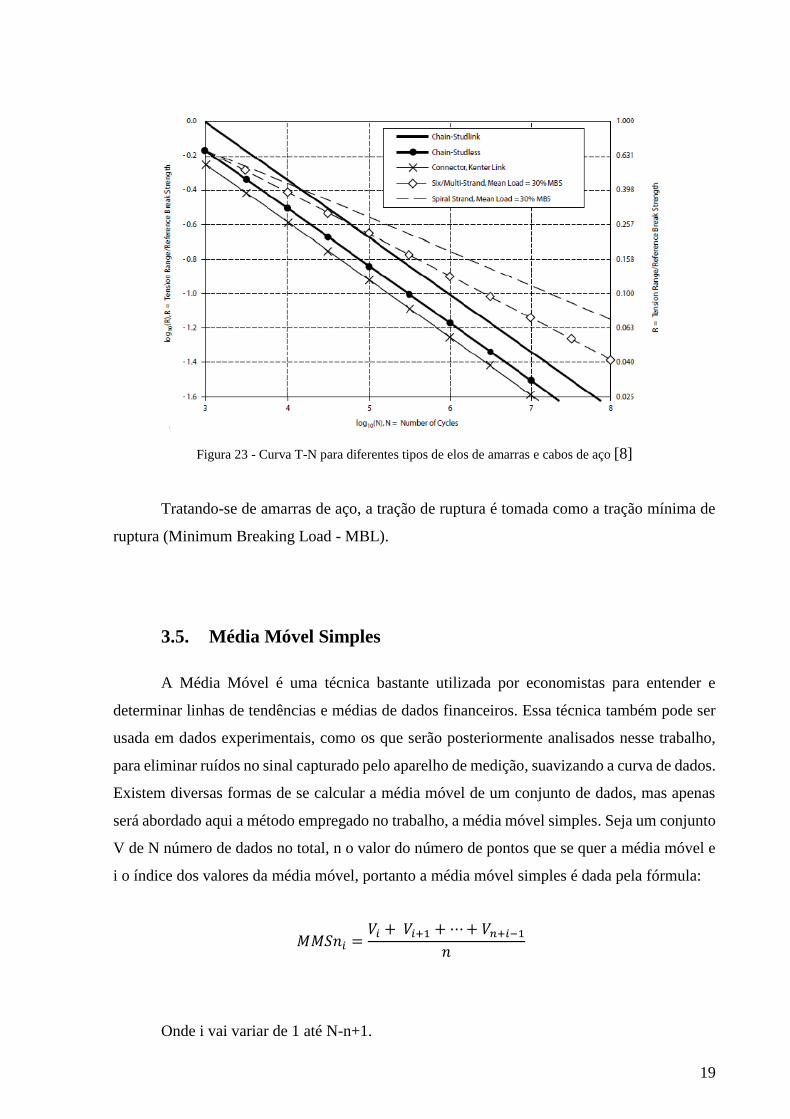
A Tabela 1 mostra os valores para M e K e o gráfico mostra o gráfico da equação acima
para diversos tipos de amarras.
Tabela 1 - Valores de M e K de acordo com a API [7]
19
Figura 23 - Curva T-N para diferentes tipos de elos de amarras e cabos de aço [8]
Tratando-se de amarras de aço, a tração de ruptura é tomada como a tração mínima de
ruptura (Minimum Breaking Load - MBL).
3.5. Média Móvel Simples
A Média Móvel é uma técnica bastante utilizada por economistas para entender e
determinar linhas de tendências e médias de dados financeiros. Essa técnica também pode ser
usada em dados experimentais, como os que serão posteriormente analisados nesse trabalho,
para eliminar ruídos no sinal capturado pelo aparelho de medição, suavizando a curva de dados.
Existem diversas formas de se calcular a média móvel de um conjunto de dados, mas apenas
será abordado aqui a método empregado no trabalho, a média móvel simples. Seja um conjunto
V de N número de dados no total, n o valor do número de pontos que se quer a média móvel e
i o índice dos valores da média móvel, portanto a média móvel simples é dada pela fórmula:
𝑀𝑀𝑆𝑛𝑖 =𝑉𝑖 + 𝑉𝑖+1 + ⋯ + 𝑉𝑛+𝑖−1
𝑛
Onde i vai variar de 1 até N-n+1.
20
4. Metodologia
4.1. Dados de Entrada
Os dados utilizados nesse estudo foram fornecidos pela Petrobras e referem-se a uma
das suas plataformas de produção de petróleo em funcionamento na Bacia de Campos. No caso
desse estudo, trata-se de uma plataforma do tipo FPSO. Os dados são divididos em dois tipos
de arquivos distintos: GPS e Octans. Em ambos os arquivos, as informações são fornecidas
para cada segundo do dia considerado, em cada mês. O arquivo GPS fornece o posicionamento
em função das coordenadas UTM Leste e UTM Norte. No arquivo Octans, são dados os
movimentos da plataforma em cada um dos seis graus de liberdade. Além disso, foi
disponibilizado o calado da embarcação em cada dia.
O sistema de coordenadas UTM – Universal Transversal Mercator – baseia-se no plano
cartesiano, utilizando-se do metro como unidade de medida. Como convenção, UTM Norte
equivale às coordenadas Norte-Sul (ordenadas) e UTM Leste, às coordenadas Leste-Oeste
(abscissas). O sistema é dividido em 60 fusos, porém não há a consideração de variação devido
a curvatura da terra. No hemisfério Sul, o sistema adota o valor de 10.000.000 m no Equador
para a coordenada Norte, decrescendo para o Sul e o valor de 500.000 m no Meridiano Central
para a coordenada Leste, decrescendo para Oeste. No hemisfério Norte, adota o valor de 0 m
no Equador, crescendo para o Norte. Quanto aos movimentos da embarcação dados no arquivo
Octans, o navio é tido como corpo rígido, possuindo assim 6 graus de liberdade. Três
movimentos de translação em cada eixo (X, Y e Z) e três movimentos de rotação em torno de
cada eixo que, no caso do navio, os três primeiros são Surge, Sway e Heave, no sentido dos
eixos X, Y e Z, respectivamente e os três últimos são Roll, Pitch e Yaw, em torno dos eixos X,
Y e Z, respectivamente.
21
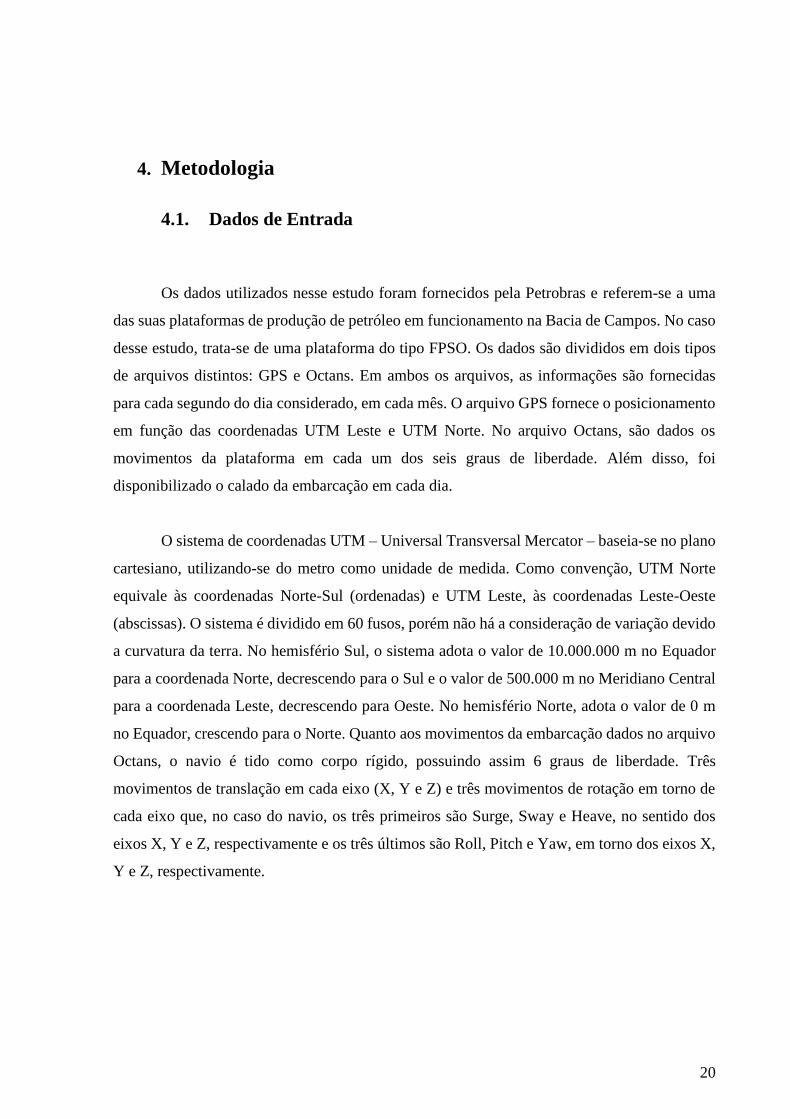
Figura 24 - Nomes dos movimentos da embarcação nos eixos xyz [2]
No que tange a análise desse trabalho, os movimentos que serão estudados são os
movimentos de ultrabaixa frequência da embarcação, ou seja, movimentos que são
extremamente lentos quando comparados com os movimentos usuais da embarcação, como o
jogo (Roll), arfagem (Pitch) e etc., movimentos esses causados pela ação de ventos e ondas na
embarcação. Esses movimentos têm período da ordem de segundos e não serão levados em
consideração nessa análise. Os principais movimentos que serão tratados nesse trabalho são os
movimentos de passeio, tanto na direção UTM Norte como na direção UTM Leste, causado
principalmente pela interação das correntes marinhas com a estrutura, que geram oscilações
com períodos na ordem de minutos ou até mesmo horas.
4.2. Filtragem dos dados
Os dados UTM nem sempre são totalmente completos e contínuos, sendo observado a
ausência de medidas de posição da plataforma em diversos dias no banco de dados, portanto
escolheu-se o dia 31/01/2012, no qual foi verificado a continuidade das medições de posição
ao longo do dia inteiro. As leituras de posição foram colocadas em forma de tabela no Excel
para que a partir dela fosse adotado um referencial para a posterior análise do movimento
executado. Tomando o eixo UTM Leste como eixo x e o UTM Norte como y e com pontos de
origem equivalentes a primeira medida de posição dada pelo sistema naquele dia, foram
calculados na planilha a posição, para cada segundo, nos eixos x e y. Para a análise proposta
neste trabalho, basta analisarmos apenas um dos eixos adotados, sendo o x escolhido nesse

22
caso. A tabela abaixo representa apenas a porção inicial da tabela com as correlações entre as
coordenadas.
Tabela 2 - Correlação entre as coordenadas de posição
UTM Leste UTM Norte X Y
390059,5 7518404,1 0,000 0,000
390059,6 7518404,0 0,028 -0,046
390059,5 7518404,0 -0,037 -0,070
390059,4 7518403,9 -0,114 -0,193
390059,4 7518403,8 -0,164 -0,293
A partir desse banco de dados, gerou-se o gráfico da série temporal da posição x, como
ilustrado na Figura 25
Figura 25 - Gráfico das coordenadas de x pelo tempo
Analisando o gráfico da Figura 25, percebe-se que há dois padrões de movimentos
oscilatórios predominantes no gráfico, o movimento de período mais curto, que são as
oscilações de menor amplitude, e há uma tendência a um movimento de maior período e
amplitude. A oscilação de maior frequência mostrada no gráfico são os movimentos gerados
pelas ondas, movimentos que possuem uma ordem de grandeza de segundos. Já os movimentos
de interesse desse trabalho são os movimentos ultralentos, que estão representados no gráfico
como a oscilação de frequência mais baixa. Para que a análise proposta pelo trabalho seja
realizada nas oscilações de baixa frequência, os dados precisam ser filtrados, de forma a
eliminar o movimento causado pelas ondas e assim formar curvas mais suaves do movimento
23
de menor frequência, viabilizando a utilização dos métodos de contagem de ciclos e acumulo
de danos mostrados anteriormente.
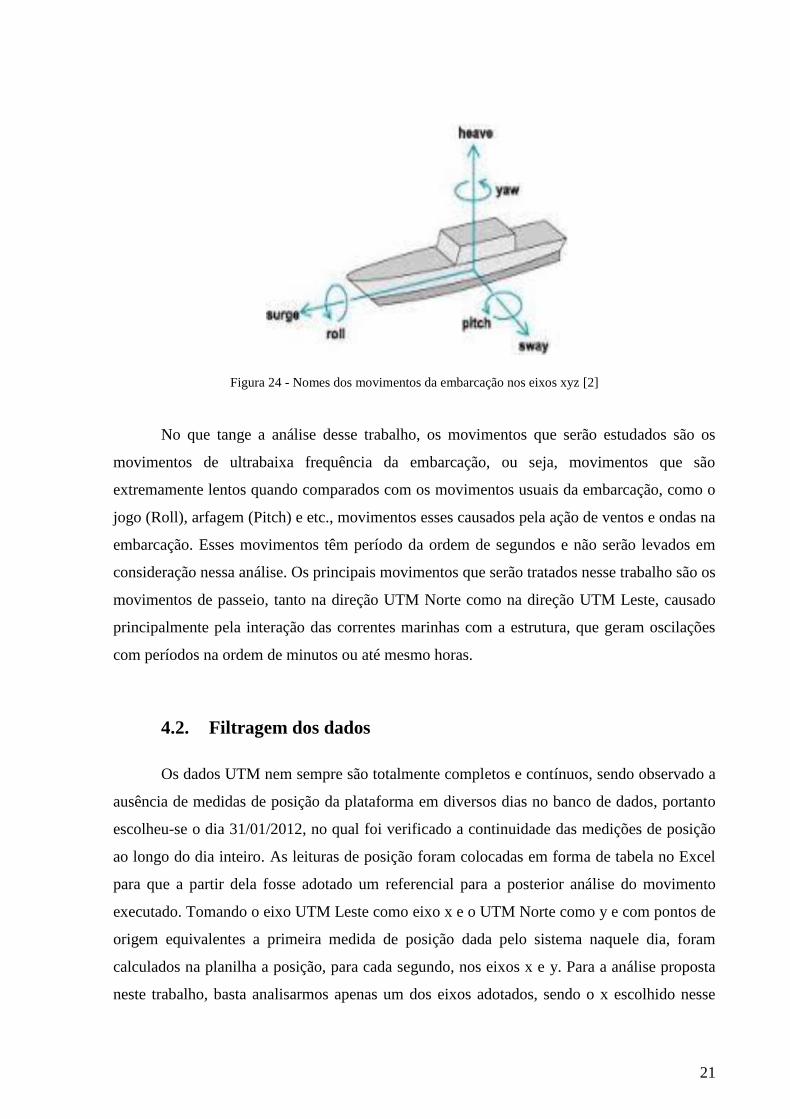
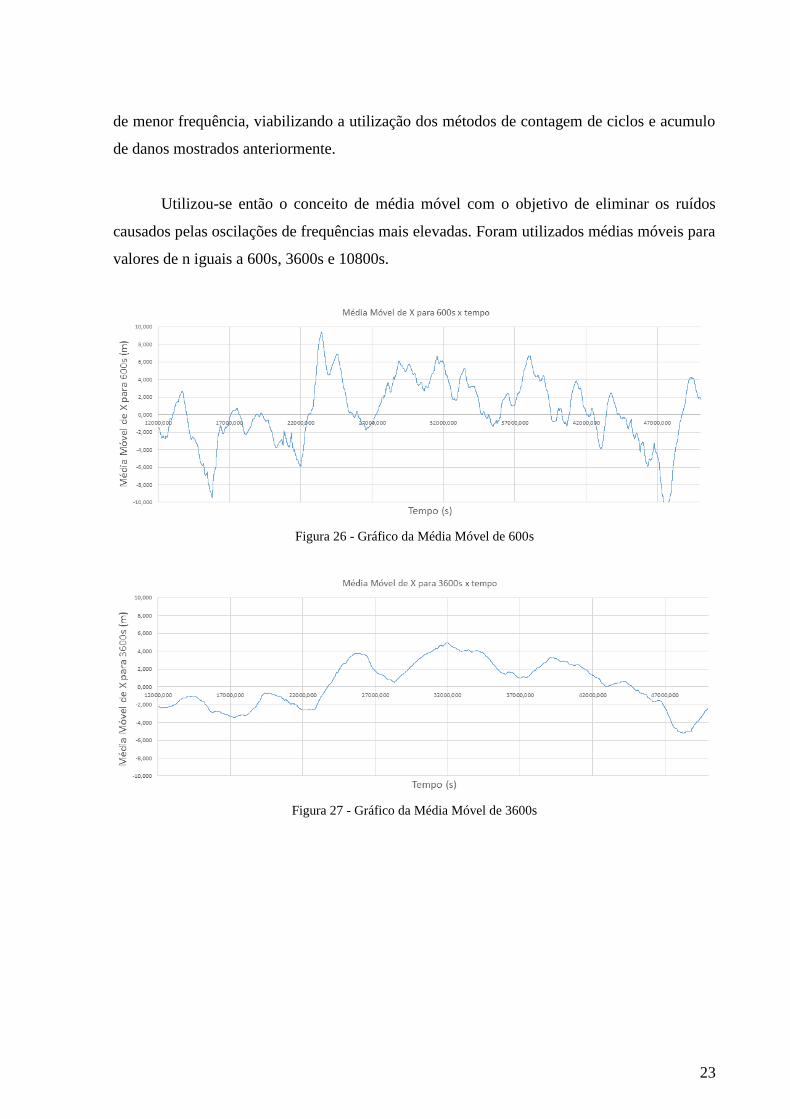
Utilizou-se então o conceito de média móvel com o objetivo de eliminar os ruídos
causados pelas oscilações de frequências mais elevadas. Foram utilizados médias móveis para
valores de n iguais a 600s, 3600s e 10800s.
Figura 26 - Gráfico da Média Móvel de 600s
Figura 27 - Gráfico da Média Móvel de 3600s
24
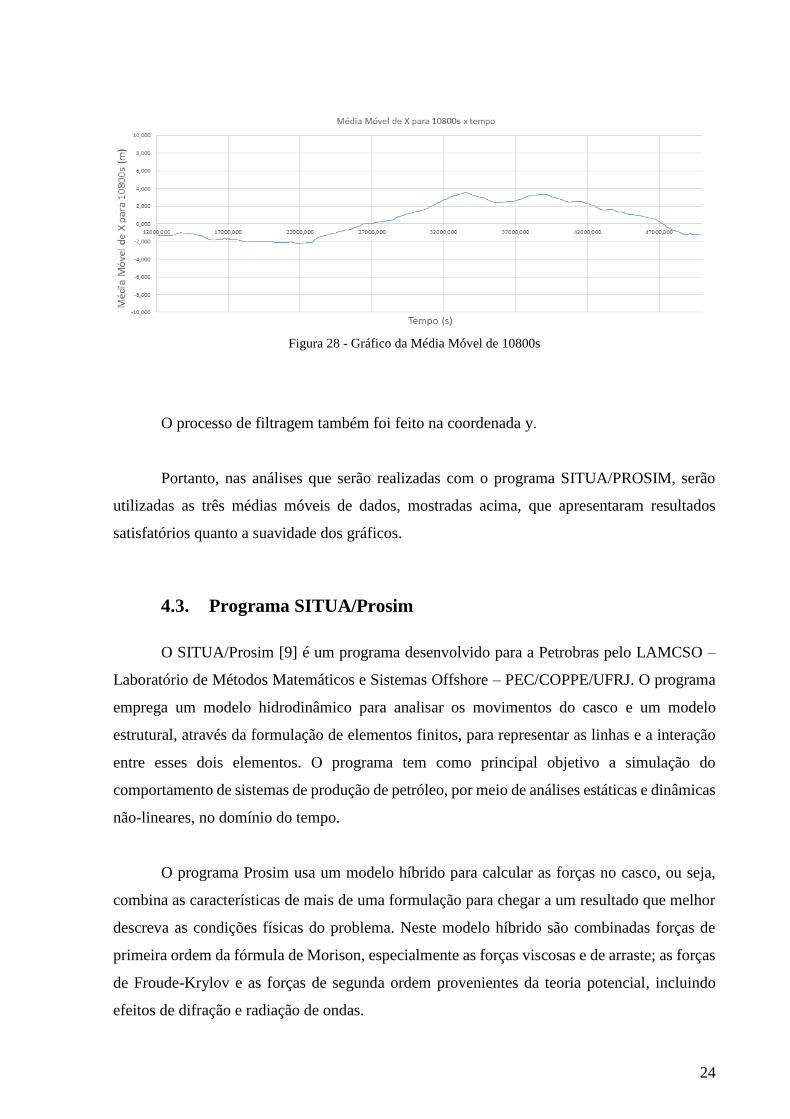
Figura 28 - Gráfico da Média Móvel de 10800s
O processo de filtragem também foi feito na coordenada y.
Portanto, nas análises que serão realizadas com o programa SITUA/PROSIM, serão
utilizadas as três médias móveis de dados, mostradas acima, que apresentaram resultados
satisfatórios quanto a suavidade dos gráficos.
4.3. Programa SITUA/Prosim
O SITUA/Prosim [9] é um programa desenvolvido para a Petrobras pelo LAMCSO –
Laboratório de Métodos Matemáticos e Sistemas Offshore – PEC/COPPE/UFRJ. O programa
emprega um modelo hidrodinâmico para analisar os movimentos do casco e um modelo
estrutural, através da formulação de elementos finitos, para representar as linhas e a interação
entre esses dois elementos. O programa tem como principal objetivo a simulação do
comportamento de sistemas de produção de petróleo, por meio de análises estáticas e dinâmicas
não-lineares, no domínio do tempo.
O programa Prosim usa um modelo híbrido para calcular as forças no casco, ou seja,
combina as características de mais de uma formulação para chegar a um resultado que melhor
descreva as condições físicas do problema. Neste modelo híbrido são combinadas forças de
primeira ordem da fórmula de Morison, especialmente as forças viscosas e de arraste; as forças
de Froude-Krylov e as forças de segunda ordem provenientes da teoria potencial, incluindo
efeitos de difração e radiação de ondas.

25
No caso de estudo deste relatório, como a posição e os movimentos da embarcação em
função do tempo já eram conhecidos, não foi necessário o uso de modelo hidrodinâmico para
o casco, pois os movimentos serão impostos (Movimento Prescrito). Outro ponto importante é
o fato dos movimentos serem lentos, o que permitiu que o problema fosse analisado como um
movimento quase estático, assim as trações nos picos de movimentos foram determinadas
alocando-se o modelo em posições extremas do movimento. Os dados de posição
disponibilizados pela PETROBRAS, filtrados, tratados e inseridos no programa SITUA/Prosim
[9] com o objetivo de calcular as trações em cada linha de ancoragem através da alocação do
modelo nas determinadas posições, resultando em um histórico de trações de cada linha de
ancoragem.
4.4. Modelo Numérico
A análise efetuada pelo SITUA/PROSIM é baseada em um modelo numérico da
plataforma. Uma ilustração desse modelo é apresentado a seguir:
Figura 29 - Vista Lateral do Modelo

26
Figura 30 - Vista Superior do Modelo
As figuras acima apresentam as linhas de ancoragem em azul escuro e os risers em azul
claro. Os risers não foram considerados na análise uma vez que estamos interessados somente
na simulação das trações nas linhas de ancoragem.
27
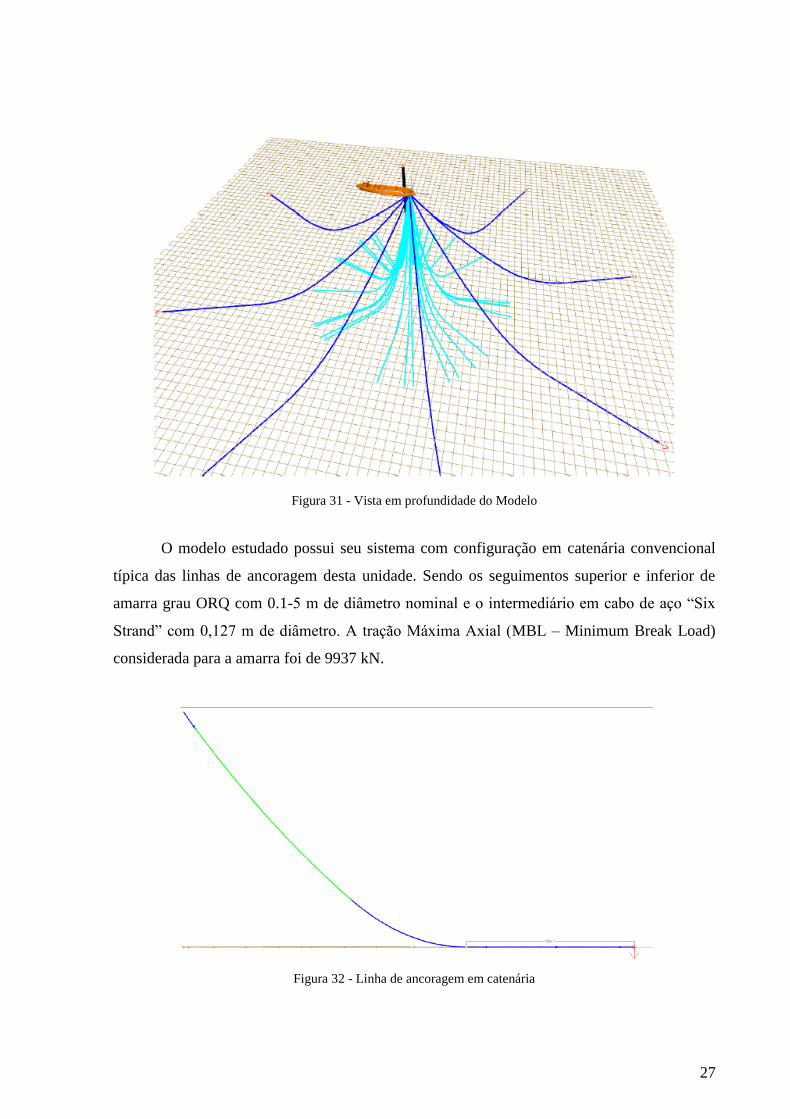
Figura 31 - Vista em profundidade do Modelo
O modelo estudado possui seu sistema com configuração em catenária convencional
típica das linhas de ancoragem desta unidade. Sendo os seguimentos superior e inferior de
amarra grau ORQ com 0.1-5 m de diâmetro nominal e o intermediário em cabo de aço “Six
Strand” com 0,127 m de diâmetro. A tração Máxima Axial (MBL – Minimum Break Load)
considerada para a amarra foi de 9937 kN.
Figura 32 - Linha de ancoragem em catenária
28
5. Resultados
5.1. Cálculo do Dano Anual
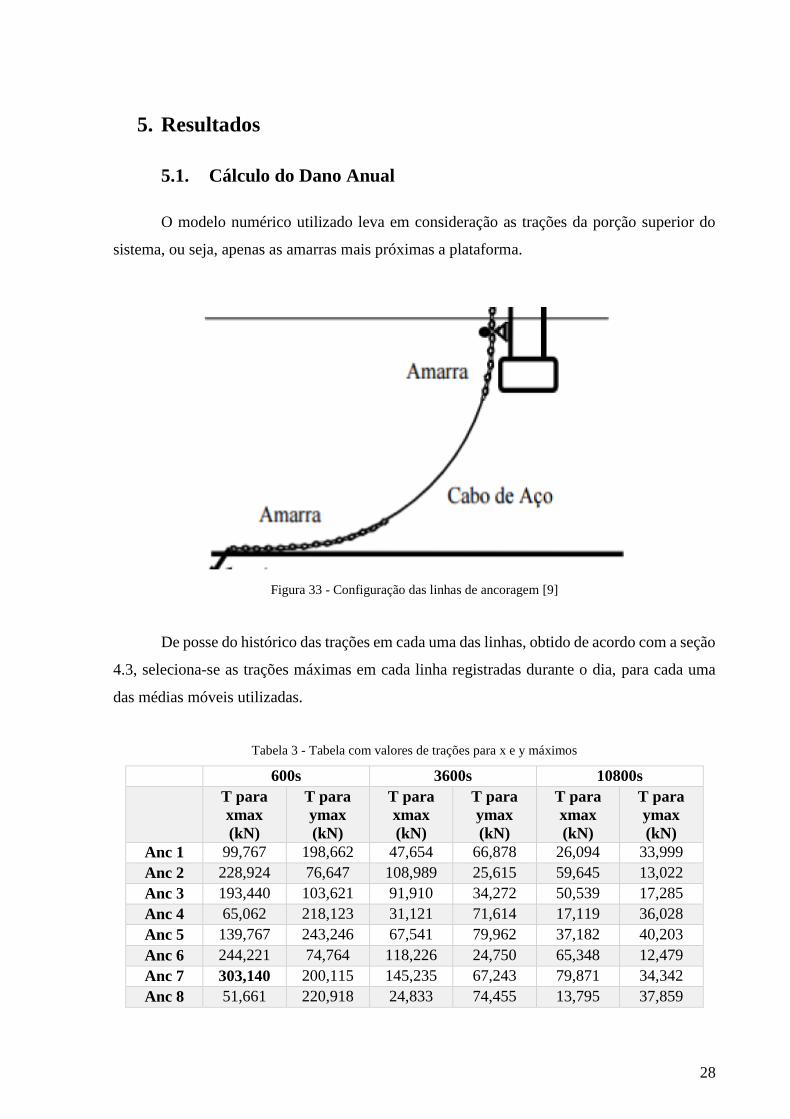
O modelo numérico utilizado leva em consideração as trações da porção superior do
sistema, ou seja, apenas as amarras mais próximas a plataforma.
Figura 33 - Configuração das linhas de ancoragem [9]
De posse do histórico das trações em cada uma das linhas, obtido de acordo com a seção
4.3, seleciona-se as trações máximas em cada linha registradas durante o dia, para cada uma
das médias móveis utilizadas.
Tabela 3 - Tabela com valores de trações para x e y máximos
600s 3600s 10800s T para
xmax
(kN)
T para
ymax
(kN)
T para
xmax
(kN)
T para
ymax
(kN)
T para
xmax
(kN)
T para
ymax
(kN)
Anc 1 99,767 198,662 47,654 66,878 26,094 33,999
Anc 2 228,924 76,647 108,989 25,615 59,645 13,022
Anc 3 193,440 103,621 91,910 34,272 50,539 17,285
Anc 4 65,062 218,123 31,121 71,614 17,119 36,028
Anc 5 139,767 243,246 67,541 79,962 37,182 40,203
Anc 6 244,221 74,764 118,226 24,750 65,348 12,479
Anc 7 303,140 200,115 145,235 67,243 79,871 34,342
Anc 8 51,661 220,918 24,833 74,455 13,795 37,859

29
Analisando a Tabela 3 pode-se perceber que a linha da âncora de número 7 é a que sofre
os maiores carregamentos nos pontos de máximo na direção x, então ela será o alvo de nossa
análise. Como o objetivo do presente trabalho é uma avaliação do efeito dos movimentos
ultralentos frente aos carregamentos das ondas na vida a fadiga, basta analisar a linha mais
tracionada em relação aos extremos, sendo essa linha a de número sete. Analisando o gráfico
da Figura 26 - Gráfico da Média Móvel de 600s, média móvel de 600s, estima-se que o período médio
das oscilações de grandes períodos é por volta de 6000s, em torno de 2 horas. Portanto as médias
móveis de 3600s (uma hora) e 10800s (três horas) podem levar aos resultados de valores de
tração a serem menores do que realmente são, assim a média móvel de 600s se torna a mais
adequada para os cálculos.
Figura 34 - Gráfico da Média Móvel de 600s
Para que possamos avaliar o dano causado pelos ciclos dos carregamentos nas amarras,
é necessário saber o número de ciclos até a falha para determinada intensidade de determinado
carregamento. Para isso, utilizando-se da curva T-N e a tabela para K e M para o cálculo do
número de ciclos até a falha para amarras, mostrada na seção 3.4, considerando as linhas em
estudo as amarras do tipo sem malhete (studless), tem-se
𝑀 = 3.0
𝐾 = 316

30
Então calcula-se o valor do número de ciclos pela equação
𝑁 =𝐾
𝑅𝑀
Sendo 𝑅 a razão entre a tração média da faixa considerada e a tração de ruptura (igual à
tração MBL – Minimum Break Load, no caso da amarra). Para a amarra em questão, a MBL é
igual a 9937 kN.
Portanto teremos
𝑅 =303,14
9937= 0,0305
Então
𝑁 =316
0,03053= 11130719 𝑐𝑖𝑐𝑙𝑜𝑠
Como o período de oscilação dos movimentos de ultrabaixa frequência não tem seu
valor calculado neste trabalho, estimado em cerca de 2 horas, e o fato de ser utilizado o valor
da tração máxima registrada no dia como o valor da intensidade carregamento cíclico para a
contagem dos ciclos, pode haver de um até cerca de doze ciclos desse carregamento por dia.
Essa consideração é feita supondo que os carregamentos registrados no dia podem ser próximos
o suficiente do máximo para que não gerem diferenças significativas no cálculo do N. Tem-se
então que o dano causado por esse carregamento de ultrabaixa frequência em um dia é dado
por
𝐷𝑢 𝑑𝑖á𝑟𝑖𝑜 =𝑛𝑑
11130719
Sendo 𝑛𝑑 o número de ciclos por dia.
31
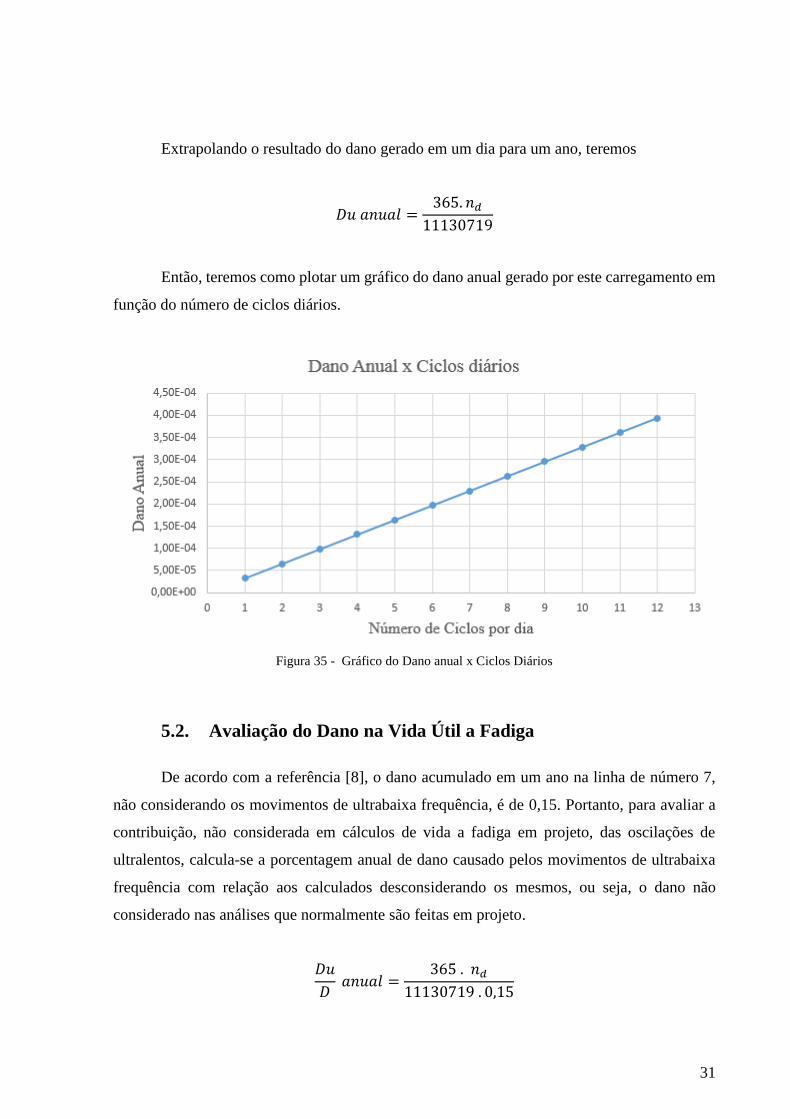
Extrapolando o resultado do dano gerado em um dia para um ano, teremos
𝐷𝑢 𝑎𝑛𝑢𝑎𝑙 =365. 𝑛𝑑
11130719
Então, teremos como plotar um gráfico do dano anual gerado por este carregamento em
função do número de ciclos diários.
Figura 35 - Gráfico do Dano anual x Ciclos Diários
5.2. Avaliação do Dano na Vida Útil a Fadiga
De acordo com a referência [8], o dano acumulado em um ano na linha de número 7,
não considerando os movimentos de ultrabaixa frequência, é de 0,15. Portanto, para avaliar a
contribuição, não considerada em cálculos de vida a fadiga em projeto, das oscilações de
ultralentos, calcula-se a porcentagem anual de dano causado pelos movimentos de ultrabaixa
frequência com relação aos calculados desconsiderando os mesmos, ou seja, o dano não
considerado nas análises que normalmente são feitas em projeto.
𝐷𝑢
𝐷 𝑎𝑛𝑢𝑎𝑙 =
365 . 𝑛𝑑
11130719 . 0,15
32
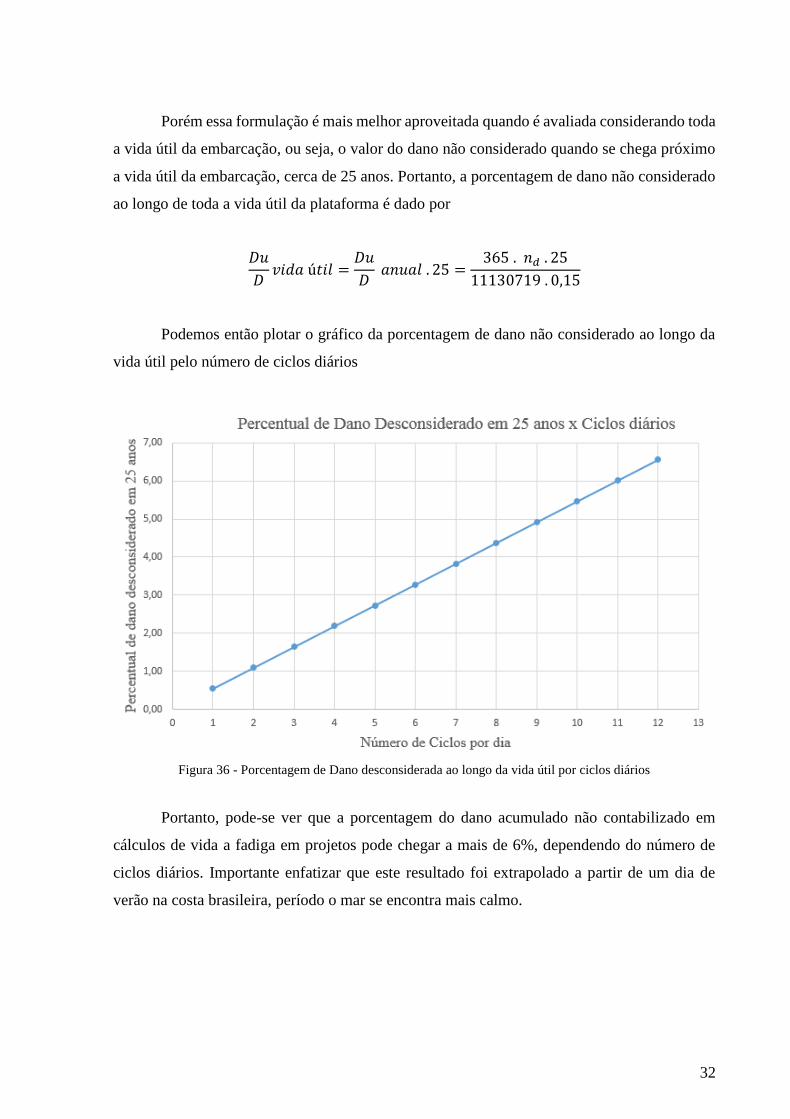
Porém essa formulação é mais melhor aproveitada quando é avaliada considerando toda
a vida útil da embarcação, ou seja, o valor do dano não considerado quando se chega próximo
a vida útil da embarcação, cerca de 25 anos. Portanto, a porcentagem de dano não considerado
ao longo de toda a vida útil da plataforma é dado por
𝐷𝑢
𝐷𝑣𝑖𝑑𝑎 ú𝑡𝑖𝑙 =
𝐷𝑢
𝐷 𝑎𝑛𝑢𝑎𝑙 . 25 =
365 . 𝑛𝑑 . 25
11130719 . 0,15
Podemos então plotar o gráfico da porcentagem de dano não considerado ao longo da
vida útil pelo número de ciclos diários
Figura 36 - Porcentagem de Dano desconsiderada ao longo da vida útil por ciclos diários
Portanto, pode-se ver que a porcentagem do dano acumulado não contabilizado em
cálculos de vida a fadiga em projetos pode chegar a mais de 6%, dependendo do número de
ciclos diários. Importante enfatizar que este resultado foi extrapolado a partir de um dia de
verão na costa brasileira, período o mar se encontra mais calmo.
33
6. Conclusão e Trabalhos Futuros
Com o objetivo de a determinar da relevância de carregamentos cíclicos de ultrabaixa
frequência no consumo da vida a fadiga em linha de ancoragem de uma plataforma de produção de
petróleo, dados reais de movimentação, medidos a partir de uma plataforma do tipo FPSO
localizada na bacia de campos, foram filtrados para que se eliminasse os ruídos de movimentos
causados pelas ondas. A partir dos dados filtrados, utilizou-se o programa SITUA/Prosim para o
cálculo das trações em cada uma das linhas, sendo selecionada a linha com maior tração na
amplitude máxima de movimento. A partir disso, supõe-se que o número de ciclos desse
carregamento márx variar de uma a doze vezes ao dia e então é calculado que a porcentagem de
dano desconsiderado em cálculos de vida a fadiga em projetos pode chegar a mais de 6%.
Com os resultados apresentados, levando em consideração que outros ciclos ultralentos
não foram considerados na avaliação, ciclos gerados pelos movimentos no eixo transversal ao
considerado na análise, e o fato de a analise ter se baseado em um dia de verão, com mar mais
calmo, a porcentagem apresentada do dano causado por oscilações de ultrabaixa frequência não
considerados em projeto podem vir a ser ainda maiores. Tratando-se de segurança offshore e
planejamento, o efeito do dano causado por esses movimentos pode vir a ser importante, uma
vez que 6% em uma vida útil de uma plataforma representa cerca de um ano e meio de diferença
na sua vida útil, o que poderia causar certa mudança no planejamento de reparo das linhas e,
consequentemente, financeiro das empresas de petróleo.
Como trabalho futuro, pode-se propor a extensão da metodologia utilizada, avaliando
um número maior de dias do ano e em diferentes estações para a obtenção dos carregamentos.
Outra proposta interessante a ser feita é a avaliação do número de ciclos diários que as
oscilações de ultrabaixa frequência possuem e a proposição de uma metodologia de projeto
para adicionar o efeito do dano causado por estas oscilações na vida útil das linhas.
34
7. Referências
[1] C. L. Gonçalves RCF, “Inspeção em linhas de ancoragem de unidades de produção,”
Anais do 21º Congresso Nacional de Ensaios não Destrutivos, Salvador, 2002.
[2] M. B. Santos, “ANÁLISE DO CONSUMO DA VIDA À FADIGA DO SISTEMA DE
ANCORAGEM DE UMA UNIDADE DE PRODUÇÃO DE PETRÓLEO,” UFRJ, Rio
de Janeiro, 2016.
[3] Z. M. C. &. Services, Zebec Marine Consultants & Services, 2015. [Online]. Available:
http://www.zebecmarine.com/spread-mooring-analysis.asp. [Acesso em 15 10 2017].
[4] H. F. d. Lima, “METODOLOGIA PARA A TOMADA DE DECISÃO NO PROJETO
DE SISTEMAS SUBMARINOS DE PRODUÇÃO DE ÓLEO E GÁS,” UFRJ, Rio de
Janeiro, 2007.
[5] B. Castro, “Sobre o trabalho feita na UNISUAM do Curso de Engenharia de Petróleo,”
UNISUAM, [Online]. Available: http://www.ebah.com.br/content/ABAAABbW0AJ/1-
dinamica-dos-sistemas-ancoragem. [Acesso em 15 10 2017].
[6] JCFragoso, “Sobre a Empresa JCFragoso,” [Online]. Available:
http://jcfragoso.com.br/corrente.aspx. [Acesso em 15 10 2017].
[7] B. Amarras, “Sobre a Empresa: Brasil Amarras,” [Online]. Available:
http://www.brasilamarras.com/. [Acesso em 14 10 2017].
[8] G. d. S. Leal, “Metodologia de Análise de Fadiga de Sistemas de Amarração de um
FPSO,” COPPE/UFRJ, Rio de Janeiro, 2015.
[9] P. Y. Kawasaki, “ANÁLISE DE LINHAS DE ANCORAGEM DE PLATAFORMAS,”
UFRJ, Rio de Janeiro, 2010.
[10] D. Roylance, “About: Massachusetts Institute of Technology,” 1 may 2001. [Online].
Available: http://web.mit.edu/course/3/3.11/www/modules/fatigue.pdf.
[11] M. A. Miner, “Cumulative Damage in Fatigue,” California, Santa Monica, 1945.
[12] S. ARIDURU, “Fatigue Life Calculation by Rainflow Cycle Counting Method,”
MIDDLE EAST TECHNICAL UNIVERSITY, 2004.
[13] “ASTM E-1049. Standard practices for cycle counting in fatigue analysis,” 1985.

35
[14] J. C. F. Jorge, L. F. G. d. Souza, P. M. C. L. Pacheco, P. P. Kenedi, J. L. C. Diniz e O.
R. d. S. Filho, “AVALIAÇÃO DE PROPRIEDADES MECÂNICAS DE ELOS DE
AMARRA,” ABCM, Campina Grande, 2010.
[15] API. RP 2SK, “Design and Analysis of Stationkeeping Systems for Floating Structures,
3rd ed.,” 2005.
[16] L. C. PROSIM/SITUA, “Simulação Numérica do comportamento de sistemas para
explotação de petróleo offshore.,” LAMCSO COPPE/UFRJ., Rio de Janeiro, 2006.
[17] S. S. Rao, Vibrações Mecanicas, São Paulo: Pearson Prentice Hall, 2009.