Felipe_SBAI2015.pdf

of 7
-
Upload
felipe-taha-santana -
Category
Documents
-
view
213 -
download
0
Transcript of Felipe_SBAI2015.pdf
-
7/23/2019 Felipe_SBAI2015.pdf
1/7
ESTIMACAO DE PROBABILIDADE DE COLISAO COM OBSTACULOS MOVEIS
PARA NAVEGACAO AUTONOMA
Felipe Taha SantAna, Valdir Grassi Junior
Departamento de Engenharia Eletrica e de Computacao - EESC/USPAvenida Trabalhador Sao-carlense, 400
Sao Carlos - SP
Emails: [email protected], [email protected]
Abstract Following a free path is an important issue in the area of autonomous mobile robotics. The
obstacles can be anything from walls and chairs in an indoor environment, or they can also be people walking
on the sidewalk and cars passing down the street. In the case of a static environment, only one calculation is
necessary, since the obstacles are standing in the environment, which differs considerably from the case of an
environment where obstacles are in constant motion. Consequently, only one calculation of the trajectory is not
enough in the latter. Our proposal is to calculate a velocity for the vehicle that minimizes the collision probability
with the obstacle, avoiding a second path planning. Therefore, just a velocity variation is enough to solve the
problem of a possible collision.
Keywords collision probability, dynamic environments, mobile robots, autonomous navigation.
Resumo Na area de robotica movel autonoma e importante o robo seguir uma trajetoria livre de obstaculos.
Os obstaculos podem ser desde paredes e cadeiras em um ambiente indoor, ou tambem po dem ser pessoas
caminhando na calcada e carros passando pela rua. No caso de um ambiente estatico e necessario apenas um
calculo de trajetoria, ja que os obstaculos estao parados no ambiente, o que difere consideravelmente do caso
de um ambiente onde os obstaculos estao em constante movimento. Portanto, apenas um calculo da trajetoria
nao e suficiente no ultimo caso. A fim de evitar um replanejamento de trajetoria, e proposto realizar um calculo
que estime uma velocidade que minimize a probabilidade de colisao do robo com o obstaculo em questao. Dessa
forma, apenas uma variacao na velocidade e suficiente para resolver o problema de uma possvel colisao.
Palavras-chave probabilidade de colisao, ambientes dinamicos, robos moveis, navegacao autonoma.
1 Introducao
Deteccao e desvio de obstaculos e essencial quando
se trata do problema de navegacao autonoma derobos moveis. A partir da decada de 90, come-caram a surgir abordagens probabilsticas para oproblema de navegacao e controle de robos na pre-senca de obstaculos moveis. Nestas abordagens,sao consideradas incertezas na localizacao do roboe na posicao dos obstaculos a fim de evitar coli-soes.
Para verificar a possibilidade de colisao entrerobo e obstaculos, Hu et al. (1991) definiram umaarea de seguranca modelada por um crculo cen-trado na posicao de robo. O raio deste crculo eraproporcional a velocidade, e para verificar a pos-
sibilidade de colisao era feito um teste de interse-cao entre o crculo e as elipses de erro na posicao.Por fim, baseado nessa informacao controlava-sea velocidade e a direcao do robo ao longo de umcaminho pre-planejado para evitar colisoes.
Burlina et al. (1992) tambem idealizaram ummetodo probabilstico para calcular a probabili-dade de colisao levando em consideracao rudosnas medidas dos sensores. A probabilidade de co-lisao era calculada em dois passos: um modeloestocastico era definido no espaco de estados doobstaculo e, neste mesmo, era feita uma caracte-
rizacao geometrica para a colisao.Fiorini and Shiller (1993a) e Fiorini and Shil-
ler (1993b) apresentaram um metodo de plane-
jamento de movimento em ambientes dinamicos.Sua abordagem consistia em selecionar manobrasde evasao para evitar obstaculos estaticos e mo-
veis no espaco de velocidades, baseado nas atuaisposicoes e velocidades, tanto do robo quanto doobstaculo. As manobras de evasao eram geradasselecionando-se as velocidades para o robo que es-tavam foram de um intervalo das velocidades doobstaculo, que representava um conjunto de velo-cidades para o robo que resultaria em uma futuracolisao. Para assegurar que a manobra de eva-sao fosse factvel, fazia-se uma interseccao entreo conjunto de velocidades de evasao e o conjuntode velocidades admissveis, definida pelas restri-coes de aceleracao. Por fim, a trajetoria otima eracalculada por uma arvore de busca das manobras
factveis. Outros trabalhos vieram por seguinteutilizando metodos parecidos com os ja discutidospara estimacao de probabilidade de colisao comobstaculos moveis em robotica, como em (Kruseet al., 1996), (Chakravarthy and Ghose, 1998) e(Shiller et al., 2001).
Outros trabalhos tambem abordaram o pro-blema no espaco de velocidades, como em (Owenand Montano, 2005). O enfoque do metodo eravoltado para o planejamento de movimento dorobo em ambiente dinamicos, evitando obstacu-los moveis e estasticos. O trabalho consistia em
mapear o ambiente dinamico no espaco de veloci-dades utilizando o conceito de estimated arrivingtimepara calcular o tempo de uma potencial co-
-
7/23/2019 Felipe_SBAI2015.pdf
2/7
lisao ou evasao. Dessa forma, podia-se achar umatrajetoria otima obedecendo tais criterios de oti-mizacao.
Existem trabalhos que utilizam metodos detratamento de incertezas para estimar a probabi-lidade de colisao utilizando distribuicao gaussiananas incertezas de movimento e de sensores, comoem (Patil et al., 2012) e (Fulgenzi et al., 2008).
O primeiro estima a probabilidade de colisao paraum planejamento de movimento baseado em dis-tribuicoes de probabilidade do estado do robo. Aprobabilidade de colisao em cada estagio do pro-cesso e condicionada ao estagio anterior, sendoeste livre de colisao ou nao. A cada estagio saogeradas amostras para o veculo em questao a par-tir de sua distribuicao. Caso o veculo e o obs-taculo estejam proximos um ao outro, algumasdessas amostras estarao em contato com o obs-taculo, e outras nao. A partir da razao entre asamostras que estao em contato com o obstaculo e
o total de amostras, e calculada a probabilidadede colisao. O ultimo descreve um algoritmo paranavegacao em ambientes dinamicos, onde sao su-postos padroes de movimento para os obstaculos,representados por processos gaussianos. De umaforma parecida com esses dois trabalhados citados,(van den Berg et al., 2012) abordaram o problemade colisao tratando o movimento e as informacoesdos sensores com incertezas gaussianas.
Neste trabalho e proposto utilizar a PDF dasinformacoes do veculo e dos obstaculos, posicao,orientacao e velocidade, para definir a probabili-dade de colisao. Este tipo de abordagem foi uti-lizado em (Lambert et al., 2008) para um robo eum obstaculo estatico. Alem de considerar incer-tezas na obtencao dessas informacoes e estimar aprobabilidade de colisao em funcao do tempo, oestudo visa encontrar uma velocidade otima parao veculo que faca com que a probabilidade de coli-sao entre este e o obstaculo seja significantementepequena a ponto de poder concluir que nao haverauma colisao na trajetoria executada pelo veculo.
2 Metodologia
2.1 Probabilidade de colisao de robo movel comum obstaculo movel
Considere a situacao na qual o veculo e oobstaculo executam trajetorias genericas des-critas pelas curvas C(v) e C(o), cujas equa-coes parametrizadas no tempo sao dadas por
C(v) : (x(v), y(v)) = (h(v)1 (t), h
(v)2 (t)) e C
(o) :
(x(o), y(o)) = (h(o)1 (t), h
(o)2 (t)). Os vetores que con-
tem as informacoes de posicao e orientacao do ve-culo e do obstaculo,
v =
x(v)y(v)(v)
, o =x(o)y(o)
(o)
, (1)
podem ser escritos utilizando as parametrizacoesdos pontos (x(v), y(v)) e (x(o), y(o)) nas curvas:
v(t) =
h
(v)1 (t)
h(v)2 (t)
(v)(t)
, o(t) =
h
(o)1 (t)
h(o)2 (t)
(o)(t)
. (2)
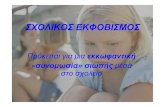
As funcoes densidade de probabilidade(PDFs) associadas as informacoes de posicao e ori-entacao dos objetos, figura 1, sao dadas por:
pv,o(r, t) = |2v,o|1/2
exp
1
2[r v,o(t)]
T1v,o[r v,o(t)]
.
(3)
02
46
810
0
2
4
6
8
100
0.2
0.4
0.6
0.8
1
x (m)y (m)
p
Figura 1: Representacao das PDFs do veculo e deum obstaculo no plano.
A probabilidade de colisao entre o veculo e oobstaculo em funcao do tempo, i.e., entre as duasPDFs, e a soma de toda area correspondente ainterseccao entre as curvas. No caso contnuo, porsoma entende-se integral, e assim a probabilidadede colisao pode ser interpretada matematicamentecomo:
P(t) =
pv(r, t) po(r, t) dr, (4)
que se resume a
P(t) = |2(v+ o)|1/2
exp
12
(t)T(v+ o)1(t)
, (5)
onde
(t) =v(t) o(t) =h
(v)1 (t) h
(o)1 (t)
h(v)2 (t) h
(o)2 (t)
(v)(t) (o)(t)
=
h1(t)h2(t)
(t)
. (6)
2.2 C alculo de velocidade de translacao para queveculo evite colisao
A fim de se fazer um estudo sobre possveis velo-cidades de translacao adequadas para que o robo
-
7/23/2019 Felipe_SBAI2015.pdf
3/7
movel navegue evitando colisoes, escreve-se a fun-cao probabilidade de colisao tambem em funcaodas velocidades do robo e obstaculo,
P(t) P(t, v). (7)
Dessa forma, a equacao (5) deve ser reescritacomo:
P(t, v) =Kexp
12
(t, v)T1(t, v)
,
(8)com
K |2(v+ o)|1/2 , (9)
(v+ o), (10)
e
(t, v) =v(t, v) o(t, v) =
h1(t, v)h2(t, v)
(t, v)
.
(11)
A partir desta funcao de probabilidade,deseja-se encontrar uma velocidade para o veculodentro do limite de seguranca, ou seja, cuja P(t)tenha um maximo menor que um valor estabele-cido, de forma, que colisoes possam ser evitadas.
Os valores maximos de P(t, v) em funcao dotempo podem ser encontrados analisando:
P(t, v)
t = 0. (12)
Portanto, derivando P(t, v) no tempo obtem-se:
P(t, v)
t =
1
2P(t, v)
T
t 1+ T1
t
= 0.
(13)Para (13) ser zero, basta que o termo entre
parenteses seja zero:
T
t 1+ T1
t = 0. (14)
A equacao (14) resultara em uma funcaot(v),e, utilizando-a para reescrever a equacao (8), estaficara expressa apenas em funcao da velocidade:
Pmax(v) =Kexp
1
2(v)T1(v)
.
(15)Agora o problema se resume em encontrar
uma velocidade v para o veculo cuja probabi-lidade associada em relacao ao tempo tenha umvalor maximo igual ou menor que um determinadovalor, digamos um limiar de seguranca, conotadopor . E possvel perceber que existem solucoesindesejaveis para o problema, e.g., v = 0.
Considerando que o robo possui uma veloci-dade inicial, v
(v)0 , ao detectar o obstaculo, limita-
se a busca da velocidade v que esteja dentro do
limiar de seguranca e cuja diferenca absoluta em
relacao a velocidade inicial, i.e. |v(v)0 v
|, tenhao menor valor possvel. Sumarizando o problema:
minv |v(v)0 v| condicionado a Pmax(v) .
Um problema de maximizacao com uma res-tricao de desigualdade do tipo:
maxx f(x) condicionado a g(x) cpode ser resolvido atraves das condicoes deKarush-Kuhn-Tucker (KKT), que sao formuladascomo
xL(x
) = 0
(g(x) c) = 0
0
g(x) c
, (16)
onde
L(x) =f(x) (g(x) c), (17)
sendo que e chamado de multiplicador de KKT.Porem e perceptvel uma diferenca basica en-
tre o problema que existe na abordagem apre-sentada e o problema resolvvel pelas condicoesde KKT: o metodo requer uma minimizacao en-quanto as condicoes de KKT visam encontrar umvalor otimo de x que maximiza a funcao em ques-tao sob as restricoes. Isso pode ser facilmenteresolvido por uma mudanca de sinal: minimizaruma funcaof(x) e equivalente a maximizar a fun-caof(x). Outra complicacao e trabalhar com afuncao modulo, pois esta nao e diferenciavel em
todo . Como o valor de qualquer funcao pura-mente quadratica e sempre positivo, ha a igual-dade:
|a x|2 = (a x)2 x . (18)
A partir deste ponto, o ndice (v), que faz refe-rencia ao veculo, torna-se desnecessario uma vezque a abordagem leva em consideracao apenas ocontrole sobre a velocidade do veculo. Portanto,fazendo a substituicao |v0v | (v0v )
2, oproblema original se transforma em:
maxv (v0 v)2 condicionado a Pmax(v) .
Utilizando-se do metodo de KKT para resol-ver o problema: o lagrangeano do sistema e
L(v) = (v0 v)2 (Pmax(v) ), (19)
e sua diferenciacao com respeito a velocidade,
L(v) = 2(v0 v) Pmax(v). (20)
Com isso, conclui-se que as condicoes (16) ficam:
2(v0 v
) Pmax(v) = 0
(
Pmax(
v
)
) = 0 0
Pmax(v)
. (21)
-
7/23/2019 Felipe_SBAI2015.pdf
4/7
Nas condicoes (21) existe um sistema de duasequacoes:
2(v0 v) Pmax(v
) = 0 (22a)
(Pmax(v) ) = 0, (22b)
e duas condicoes:
0 (23a)
Pmax(v) . (23b)
Isolando em (22a) e substituindo em (22b), estafica expressa da seguinte maneira:
2(v0 v)
Pmax(v)
(Pmax(v) ) = 0, (24)
que e a equacao cuja solucao resultara na veloci-dade otima. Duas solucoes podem ser facilmentepercebidas: v = v0 ou Pmax(v
) = . Comoe sabido, possivelmente havera uma colisao se oveculo continuar a trafegar com a sua veloci-dade inicial, portanto pode-se descartar a primeirasolucao. Dito isso, a solucao a se considerar ePmax(v
) =, encontrando-se a velocidade otimav para o problema.
2.3 Expansao do estudo: evitar colisao com nobstaculos moveis
Suponha um cenario onde existam n obstaculosdetectados e seja a probabilidade de colisao como i-esimo obstaculo Pi. A probabilidade de naohaver uma colisao e o complemento da probabili-dade de colisao, 1 Pi. Portanto, a probabilidadede nao-colisao com os obstaculos i = 1, 2,...,n e(1 P1).(1 P2)...(1 Pn). O complemento do ul-timo expressa a probabilidade de colisao com pelomenos um obstaculo:
P(n) = 1 n
i=1
(1 Pi), (25)
que e a probabilidade de colisao a ser analisada
para este problema.
Da mesma maneira abordada para um obsta-culo, o problema se resume em calcular uma velo-cidade otima dentro do limiar de seguranca e cujadiferenca com a velocidade inicial do veculo sejaa menor possvel:
maxv (v0 v)2 condicionado a P
(n)max(v) .
Utilizando-se do metodo de KKT para resol-ver o problema, a velocidade otima e encontradaresolvendo-se a equacao
P(n)max(v) = 1
ni=1
(1 Pi(v)) = . (26)
3 Aplicacao do metodo
3.1 Evitar colisao com um obstaculo movel exe-cutando uma trajetoria retilnea uniforme
Considerando que o veculo e o obstaculo exe-cutam trajetorias retilneas uniformes, os vetoresconfiguracoes = (x y )T dos objetos em fun-
cao do tempo podem ser escritos como
v,o(t) =
x
(v),(o)0 +tv
(v),(o) cos((v),(o))
y(v),(o)0 +tv
(v),(o) sin((v),(o))(v),(o)
.
(27)Com essas trajetorias, a funcao probabilidade
de colisao possui o seguinte formato
P(t, v) =Ke1
2f(t,v) , (28)
com
f(t, v) =At2v2+Bt2v+Ctv +Dt2+Et+F . (29)
Da mesma maneira, a equacao (15) possui oseguinte formato
Pmax(v) =Ke 1
2f(v) , (30)
com
f(v) = 1
4
(Cv +E)2
(Av2 +Bv +D)+F . (31)
Para encontrar a velocidade otima, deve-se re-solver P(v) =, resultando em
v =(2CE B)
2(C2 A)
1
2
2CE B
C2 A
2 4
E2 D
C2 A
,
(32)onde
4
ln
K
2+F
. (33)
3.2 Evitar colisao comn obstaculos moveis exe-
cutando trajetorias retilneas uniformesConsidere o cenario com n obstaculos. Abrindo aequacao (25) e possvel observar seu formato,
P(n) =i
Pi i1=i2
Pi1Pi2 + ...
+ (1)n1
i1=i2=...=in
Pi1Pi2 ...Pin .(34)
Nota-se que o primeiro termo predomina sobre osdemais, ja que Pi 1. Portanto, e convenienteescreve-la considerando somente o primeiro termo;
e isso torna-se evidente quando se pensa na ocor-rencia exclusiva de cada colisao, i.e., a probabili-dade do veculo colidir com o primeiro obstaculo,
-
7/23/2019 Felipe_SBAI2015.pdf
5/7
ou com o segundo obstaculo, e assim sucessiva-mente ate o n-esimo obstaculo:
P(n) =n
i=1
Pi . (35)
Todo o formalismo utilizado para um obsta-culo serve para a expansao em questao.
P(n)max(v) =K1e1
2 f1(v) +...+Kn e1
2 fn(v) = .(36)
Existe uma dificuldade consideravel em calcu-lar as razes de (36) devido a expressao de f(v):uma divisao entre polinomios de segundo grau.Frente essa dificuldade e proposto utilizar umaabordagem alternativa, descrita a seguir.
3.3 Abordagem alternativa: probabilidades inde-pendentes
Ao inves de considerar a probabilidade de colisaocom ao menos um obstaculo, cuja expressao de-
pende de todas as probabilidades independentesjuntas, utiliza-se o estudo individual de cada uma,como feito para um obstaculo. Em um ambienteonde o veculo esteja detectando n obstaculos, aprobabilidade de colisao em funcao da velocidadecom cada um e Pi.
Resolvendo-se o problema de minimizacaopara encontrar a velocidade otima de cada uma domesmo modo que foi resolvido na primeira se caodo captulo, utilizando-se das condicoes de KKT echegando na equacao (24), tem-se as velocidadesotimas referentes a cada obstaculo i, vi.
O proximo passo consiste em estudar a proba-bilidade de colisao com cada obstaculo com cadavelocidade otima calculada, Pi(v
j ) com i = j.
Para isso pode-se organizar os valores em uma ma-triz para facilitar a observacao:
Mcol =
P1(v1) P2(v
1) Pn(v
1)
P1(v2) P2(v
2) Pn(v
2)
......
. . . ...
P1(vn) P2(v
n) Pn(v
n)
. (37)
Agora o problema se resume em buscar uma
velocidade entre todas calculadas que seja a me-lhor a respeito de ter valores seguros para as pro-babilidades associadas. Uma forma eficiente detratar o problema e encontrar possveis valores al-tos de Pi(v
j ) e descarta-los . Isso pode ser feito
da seguinte maneira:
1. Identifica-se os valores maximos para cada
velocidade otima vj , P(max)i (v
j ), que sao os
maiores valores de cada linha da matriz (37),
M(max)
col =
P(max)i (v
1)
P(max)j (v
2)
...
P(max)k (v
n)
, (38)
2. Toma-se o menor valor entre os maximos, i.e,o menor valor da matriz (38), cuja velocidadesera considerada otima para o problema. Por-tanto, a velocidade otima e:
v = arg min{maxi
{Pi(vj )}} . (39)
4 Simulacoes e Resultados
Sendo o raio de alcance do sensor dado por rs ea distancia entre o veculo e o obstaculo expressapor d, o metodo desenvolvido para um obstaculoe aplicado em forma do algoritmo:
if d rs thenro= (o, o) | rv = (v, v)P(t, v) P(v)v =sol{P(v) =}v= v
elsev = v0
Para n obstaculos, o metodo foi aplicado naforma do algoritmo:
if d rs thenr(i)o = (
(i)o ,
(i)o )i = 1,...,n | rv = (v, v)
Pi(t, v) Pi(v)vi =sol{Pi(v) =}v = arg min{max
i{Pi(vj)}}
v= v
elsev = v0 .
A figura 2 ilustra uma sequencia de quadrosno ambiente de simulacao contendo, alem do ve-
culo, tres potenciais obstaculos, (a). Os obsta-culos sao detectados pelo sensor do veculo assimque entram em seu raio de alcance, (b). Apos adeteccao dos obstaculos o veculo executa o algo-ritmo, calculando a velocidade otima e alterandosua velocidade para esta, (c), evitando a colisao,(d).
0 5 10 15 20 25 300
5
10
15
20
25
30
x (m)
y(m)
(a) Ambiente con-tendo o veculo e tres
potenciais obstaculos.
0 5 10 15 20 25 300
5
10
15
20
25
30
x (m)
y(m)
(b) Os obstaculos saodetectados p elo sensor
do veculo.
0 5 10 15 20 25 300
5
10
15
20
25
30
x (m)
y(m)
(c) O veculo entra navelocidade otima.
0 5 10 15 20 25 300
5
10
15
20
25
30
x (m)
y(m)
(d) A colisao foi evi-tada.
Figura 2: Sequencia de quadros no ambiente de si-mulacao.
-
7/23/2019 Felipe_SBAI2015.pdf
6/7
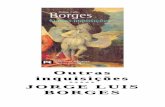
A velocidade otima encontrada para um li-miar de 105N foi suficiente para que o veculoe os obstaculos nao oferecessem perigo mutuo al-gum. Os algoritmos foram executados vinte vezes,e seus tempos medios de execucao estao expressosna figura 3. A partir do grafico e possvel observara dependencia linear do tempo de execucao com ovalor de n: t(n) = 0.029 n 0.0016.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.50
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
n
t(s)
t = 0.029*n 0.0016
Figura 3: Grafico do tempo de execucao dos algorit-mos por n.
5 Conclusoes
O estudo abordou o problema de haver obstaculosmoveis na trajetoria que o robo esta executandopara navegacao autonoma. A partir de informa-coes coletadas pelos sensores do robo, um modelode incertezas e adicionado a fim de tratar rudospresentes. A partir desse modelo, nesse trabalhofoi utilizado um modelo gaussiano, e possvel cal-cular a probabilidade de colisao entre o veculo e oobstaculo em funcao do tempo e da velocidade do
robo. Dessa forma, sabendo que e provavel haveruma colisao na rota que o robo executa, torna-seconveniente variar sua velocidade a fim de evitara colisao e o replanejamento da trajetoria. Paraisso utiliza-se metodos de otimizacao, nesse casoe tratado um problema de minimizacao com umarestricao de desigualdade que pode ser resolvidoatraves das condicoes de Karush-Kuhn-Tucker.
O metodo desenvolvivo para um obstaculo foiexpandido paran obstaculos. Dito isso, a aborda-gem de probabilidades independentes se mostrouextremamente bem sucedida: tempo de execucaomuito pequeno e eficiencia para evitar colisoes.
Agradecimentos
Este trabalho recebeu suporte do CNPq.
Referencias
Burlina, P., DeMenthon, D. and Davis, L. (1992).Navigation with uncertainty: reaching a goalin a high collision risk regions, IEEE Inter-national Conference on Robotics and AUto-mation3: 24402445.
Chakravarthy, A. and Ghose, D. (1998). Obsta-cle avoidance in a dynamic environment: A
collision cone approach, IEEE Transactionson systems, man, and cybernetics - part A:Systems and humanspp. 562574.
Fiorini, P. and Shiller, Z. (1993a). Motion plan-ning in dynamic environments using the re-lative velocity paradigm, IEEE Internatio-nal Conference on Robotics and Automation
pp. 560565.
Fiorini, P. and Shiller, Z. (1993b). Motion plan-ning in dynamic environments using velocityobstacles.
Fulgenzi, C., Tay, C., Spalanzani, A. and Laugier,C. (2008). Probabilistic navigation in dyna-mic environment using rapidly-exploring ran-dom trees and gaussian processes,IEEE/RSJInternational Conference on Intelligent Ro-bots and Systemspp. 10561062.
Hu, H., Brady, M. and Probert, P. (1991). Naviga-tion and control of a mobile robot among mo-ving obstacles, Proceedings of the 30th IEEEConference on Decision and Controlpp. 698703.
Kruse, E., Gutsche, R. and Wahl, F. M. (1996).Estimation of collision probabilities in dyna-mic environments for path planning with mi-nimum collision probability, IEEE/RSJ In-ternational Conference on Intelligent Robotsand Systemspp. 1288 1295.
Lambert, A., Gruyer, D. and Pierre, G. S. (2008).
A fast monte carlo algorithm for collisionprobability estimation,Control, Automation,Robotics and Vision, 2008. ICARCV 2008.10th International Conference on pp. 406411.
Owen, E. and Montano, L. (2005). Motion plan-ning in dynamic environments using the ve-locity space, IEEE/RSJ International Con-ference on Intelligent Robots and Systemspp. 2833 2838.
Patil, S., van den Berg, J. and Alterovitz, R.
(2012). Estimating probability of collisionfor safe motion planning under gaussian mo-tion and sensing uncertainty,IEEE Internati-onal Conference on Robotics and Automation3: 32383244.
Shiller, Z., Large, F. and Sekhavat, S. (2001).Motion planning in dynamic environments:Obstacles moving along arbitrary trajecto-ries, IEEE International Conference on Ro-botics and Automationpp. 37163721.
van den Berg, J., Wilkie, D., Guy, S., Nietham-
mer, M. and Manocha, D. (2012). Lqg-obstacles: Feedback control with collisionavoidance for mobile robots with motion and
-
7/23/2019 Felipe_SBAI2015.pdf
7/7
sensing uncertainty,Proceedings of the IEEEInternational Conference on Robotics andAutomationpp. 346353.