I) Funções vetoriais a valores reais -...
35
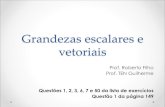
Funções de várias variáveis I) Funções vetoriais a valores reais: Sendo I um intervalo da reta real: domínio da função f Exemplo: Curvas no espaço tri-dimencional R 3 Quando uma partícula se movimenta no espaço R 3 , ela descreve uma curva r(t) denominada trajetória. (t)) f (t),...., f (t), (f f(t) t n 2 1 n R R I f: (t)) f (t), f (t), (f f(t) t 3 2 1 3 R R I f: )) ( ), ( ), ( ( (t)) r (t), r (t), (r (t) r t ] , [ 3 2 1 3 t z t y t x R b a I : r
Transcript of I) Funções vetoriais a valores reais -...
Funções de várias variáveis
I) Funções vetoriais a valores reais:
Sendo I um intervalo da reta real: domínio da função fExemplo:
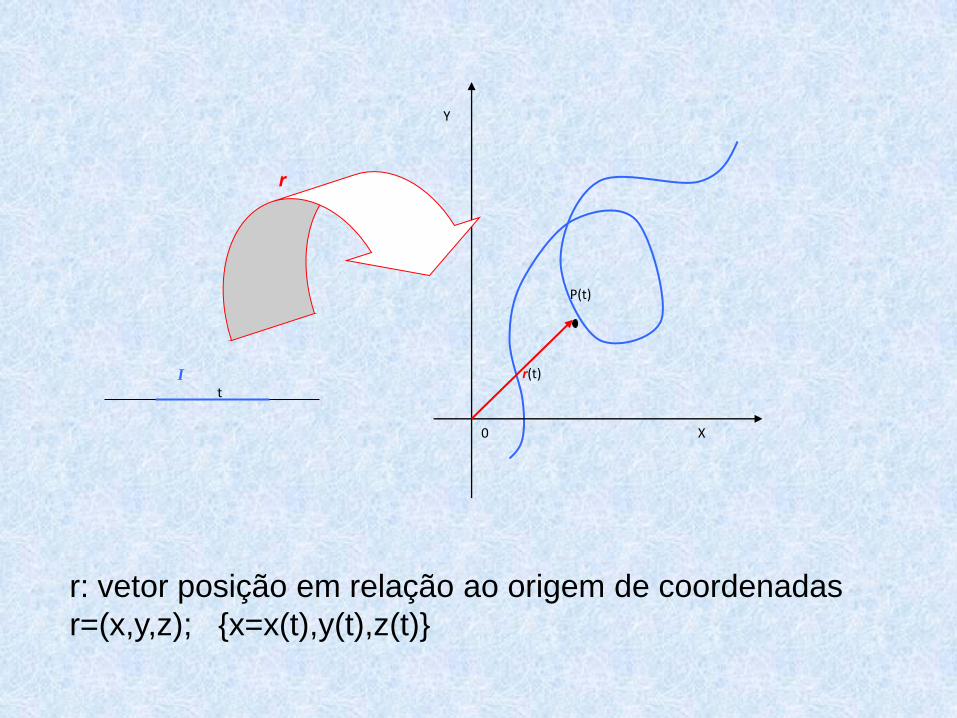
Curvas no espaço tri-dimencional R3
Quando uma partícula se movimenta no espaço R3, ela descreve
uma curva r(t) denominada trajetória.
(t))f(t),....,f(t),(ff(t) t
n21
n RR If:
(t))f(t),f(t),(ff(t) t
321
3
RR If:
))(),(),(((t))r(t),r(t),(r(t)r t
],[
321
3
tztytx
RbaI:r
P(t)
r(t)It
r
0 X
Y
r: vetor posição em relação ao origem de coordenadas
r=(x,y,z); {x=x(t),y(t),z(t)}
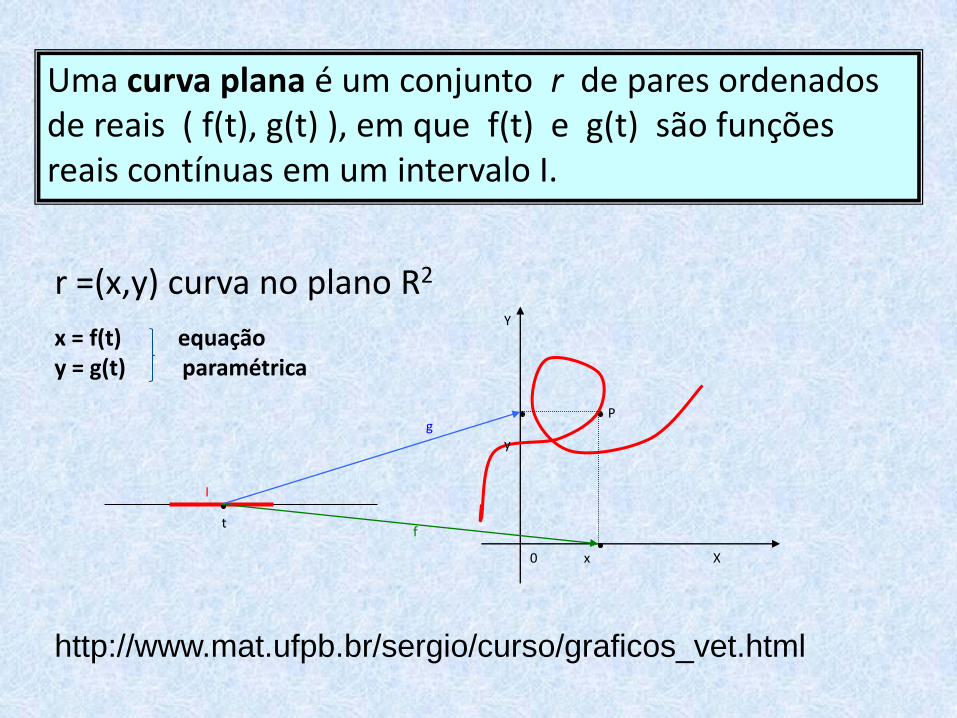
Uma curva plana é um conjunto r de pares ordenados de reais ( f(t), g(t) ), em que f(t) e g(t) são funções reais contínuas em um intervalo I.
I
tf
gP
Y
y
0 x X
r =(x,y) curva no plano R2
x = f(t) equaçãoy = g(t) paramétrica
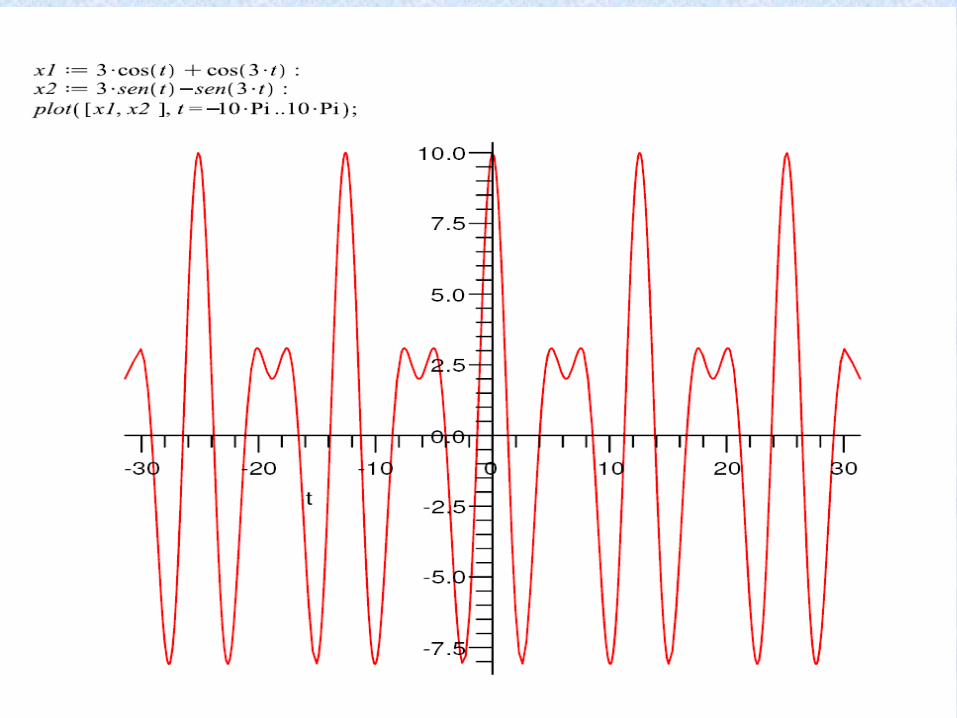
http://www.mat.ufpb.br/sergio/curso/graficos_vet.html
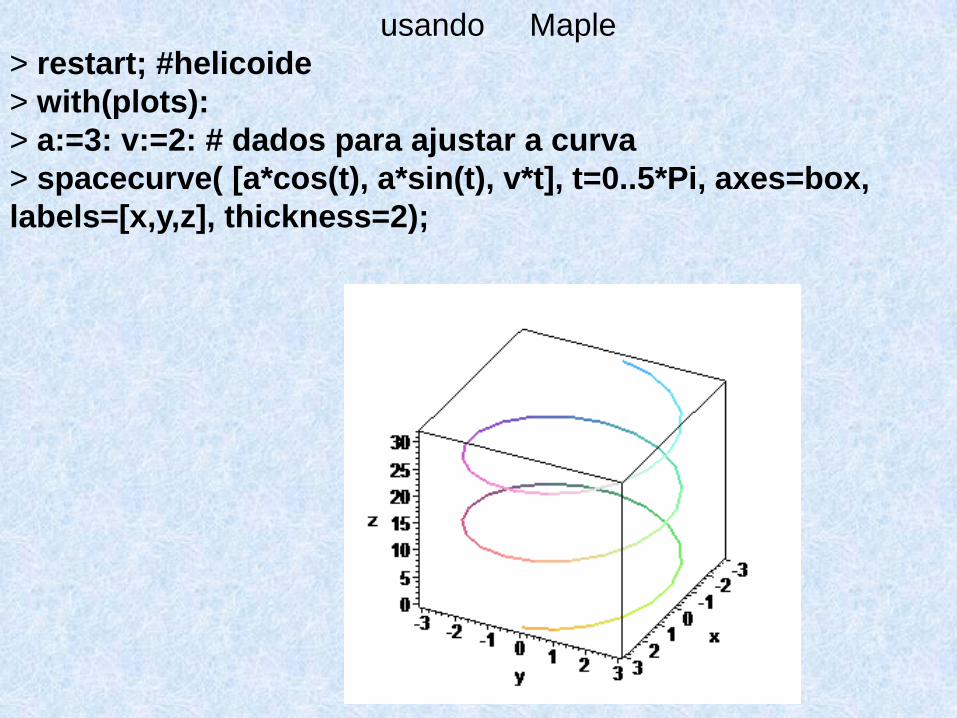
usando Maple
> restart; #helicoide
> with(plots):
> a:=3: v:=2: # dados para ajustar a curva
> spacecurve( [a*cos(t), a*sin(t), v*t], t=0..5*Pi, axes=box,
labels=[x,y,z], thickness=2);
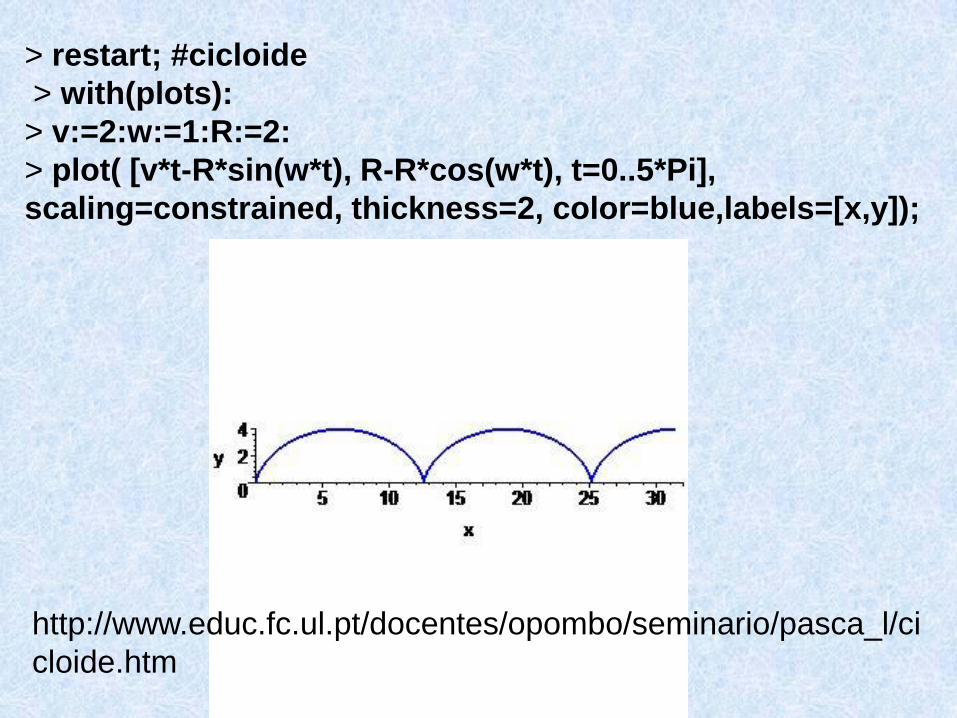
> restart; #cicloide
> with(plots):
> v:=2:w:=1:R:=2:
> plot( [v*t-R*sin(w*t), R-R*cos(w*t), t=0..5*Pi],
scaling=constrained, thickness=2, color=blue,labels=[x,y]);
http://www.educ.fc.ul.pt/docentes/opombo/seminario/pasca_l/ci
cloide.htm
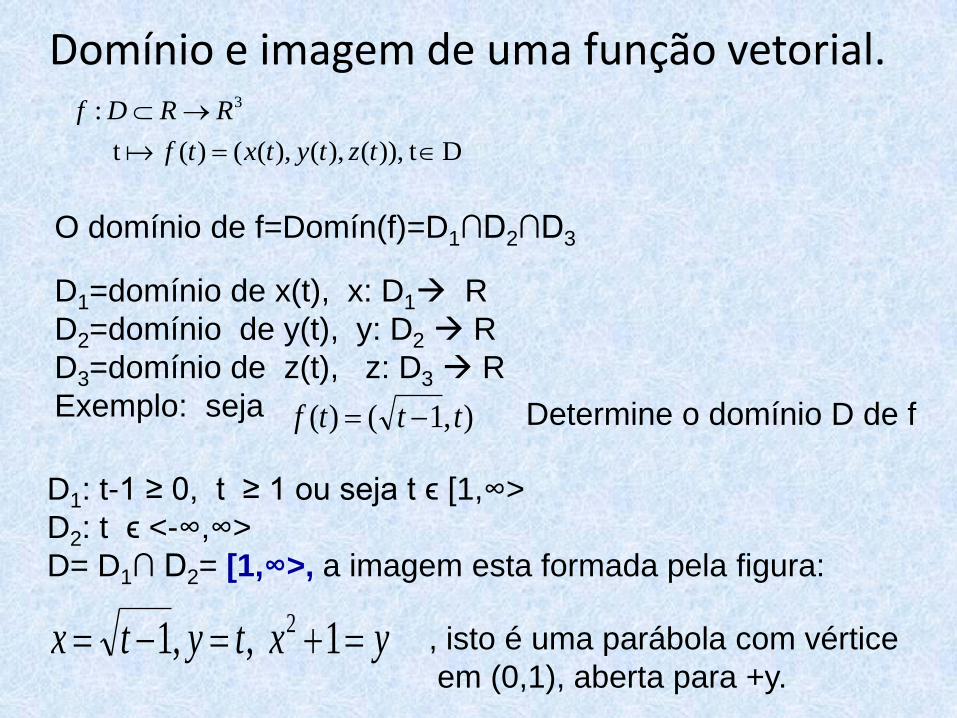
Domínio e imagem de uma função vetorial.
D t )),(),(),(()( t
: 3
tztytxtf
RRDf
O domínio de f=Domín(f)=D1∩D2∩D3
D1=domínio de x(t), x: D1 R
D2=domínio de y(t), y: D2 R
D3=domínio de z(t), z: D3 R
Exemplo: seja ),1()( tttf Determine o domínio D de f
D1: t-1 ≥ 0, t ≥ 1 ou seja t ϵ [1,∞>
D2: t ϵ <-∞,∞>
D= D1∩ D2= [1,∞>, a imagem esta formada pela figura:
yxtytx 1 ,,1 2, isto é uma parábola com vértice
em (0,1), aberta para +y.
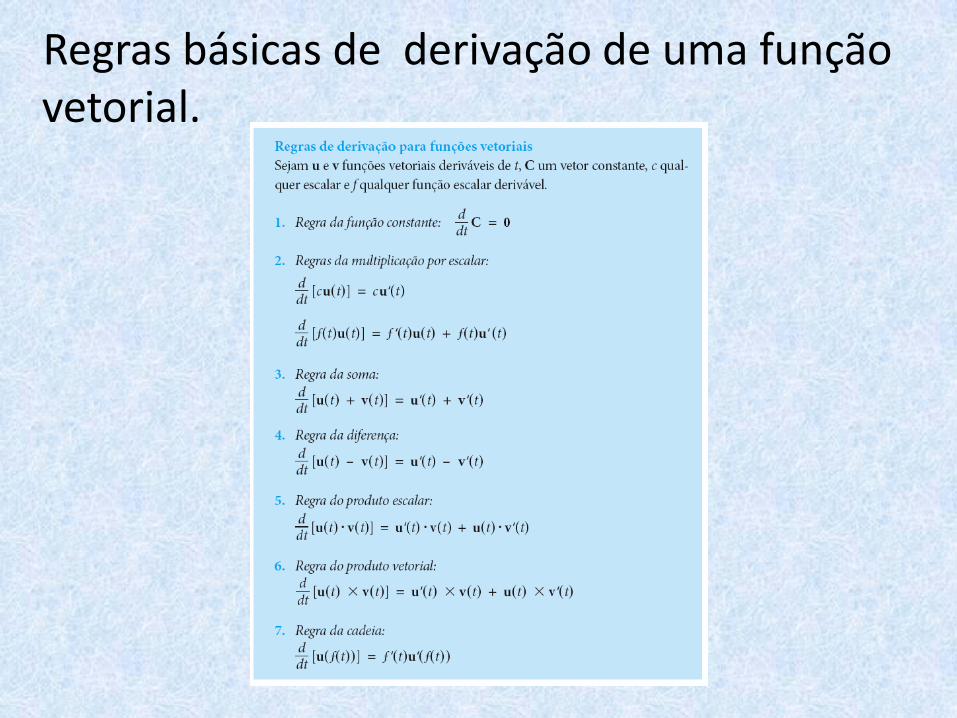
Regras básicas de derivação de uma funçãovetorial.
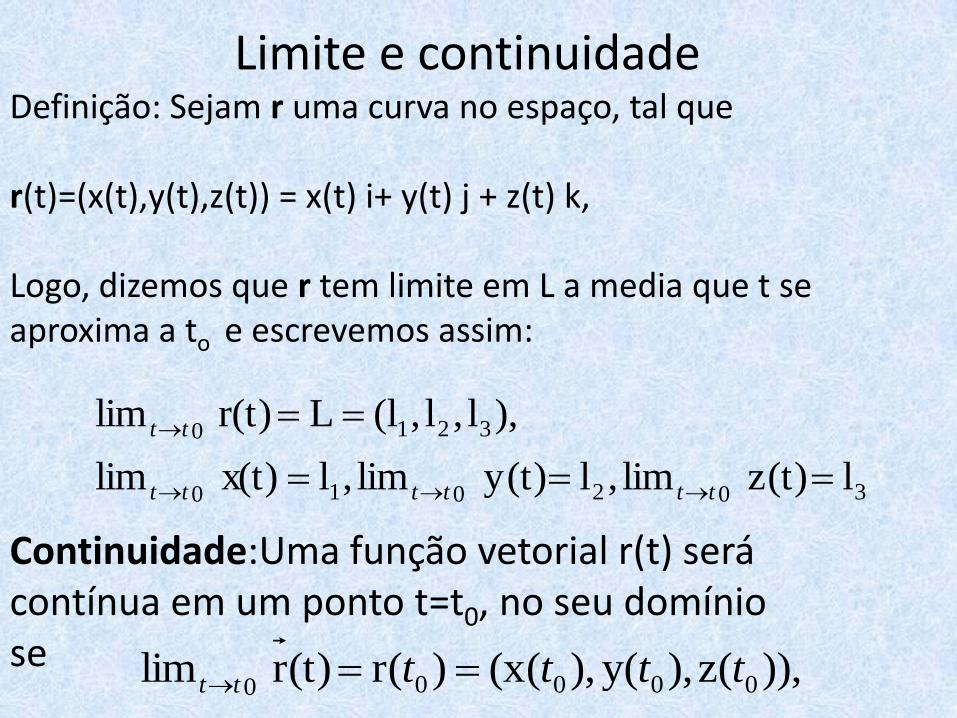
Limite e continuidadeDefinição: Sejam r uma curva no espaço, tal que
r(t)=(x(t),y(t),z(t)) = x(t) i+ y(t) j + z(t) k,
Logo, dizemos que r tem limite em L a media que t se aproxima a to e escrevemos assim:
Continuidade:Uma função vetorial r(t) serácontínua em um ponto t=t0, no seu domíniose
3 02 01 0
321 0
lz(t) lim,ly(t) lim,l x(t)lim
),l,l,(lLr(t)lim
tttttt
tt
),)(z),(y),((x)(r(t)rlim 0000 0tttttt
Derivada de uma função vetorialDefinição: Seja r uma curva no espaço, ela é derivável outem derivada, se as derivadas das componentes x,y,z estãobem definidas.
Interpretação geométrica da derivada de uma função vetorial. Seja r(t) o vetor posição de uma partícula em movimento no espaço R3 . A função r´(t) é a velocidade da partícula e é um vetor tangente à trajetória espacial descrita pela partícula (para cada instante do tempo t).
),dt
dz,
dt
dy,
dt
dx(
t
r(t)-t)r(tlim)´(
0
t
dt
drtr
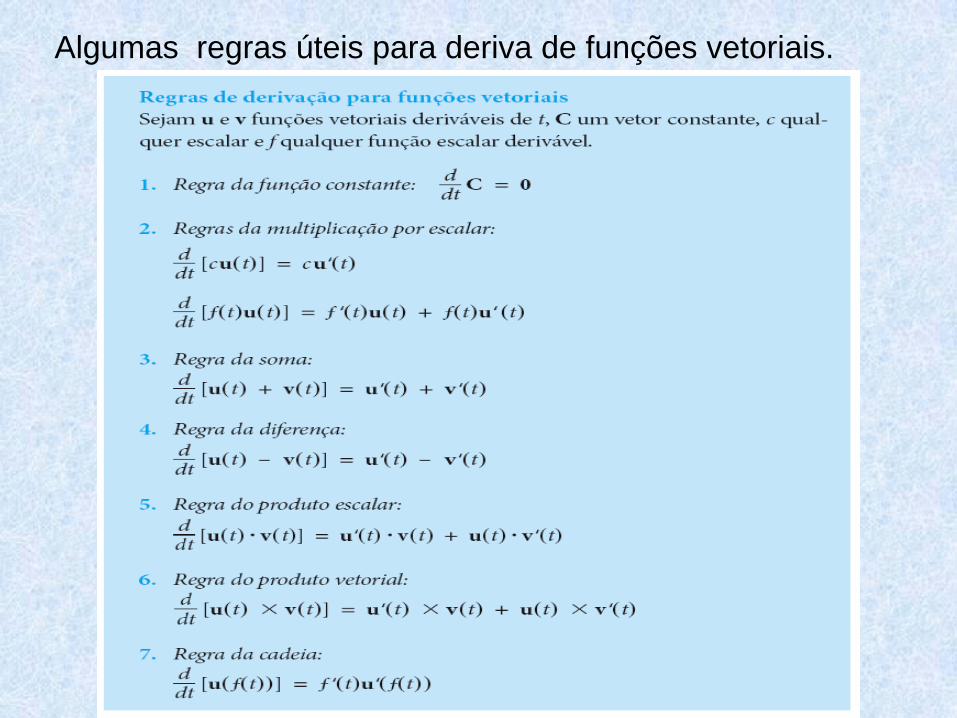
Algumas regras úteis para deriva de funções vetoriais.
L
P0
0 Y
X
Z
P
V
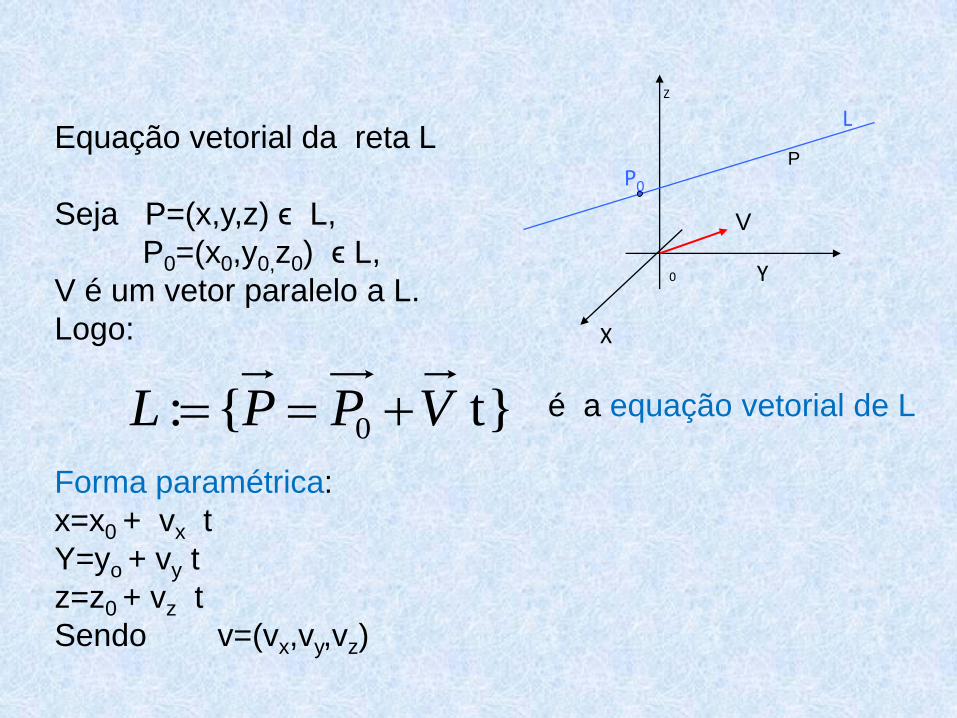
Equação vetorial da reta L
Seja P=(x,y,z) ϵ L,
P0=(x0,y0,z0) ϵ L,
V é um vetor paralelo a L.
Logo:
é a equação vetorial de L
Forma paramétrica:
x=x0 + vx t
Y=yo + vy t
z=z0 + vz t
Sendo v=(vx,vy,vz)
t}{: 0 VPPL
ExercíciosExercício 1.- Determine a velocidade v(t) e a aceleração a(t)de uma partícula que descreva a seguinte curva (trajetória)r(t)=(2t, 3t2,3t+4)m.
Exercício 2.- Seja uma partícula pontual que segue uma trajetória dada pela curva, definida assim:
R, w, V são constantes. R =2,w = 1, v=R.w =2.a) Determine a posição e a velocidade no instante t=0s, e t=3π/2.b) Determine o vetor unitário tangente à trajetória no instante t=3π/2, e a equação da reta tangente a curva α no instante t=3π/2.
2: RI
Rcos(wt)),-RRsin(wt),-(vtα(t)t:α
Integral de uma função vetorialSeja f(t) =(x(t),y(t),z(t)) uma função vetorial, se as componentes de f são integráveis sobre I=[a,b],então
Exemplo: Calcular a integral da funçãof(t)= ((cos(w t))2, v t, t3+2t+1)
Comprimento de arco para curvas lisasQuando uma partícula percorre uma determinadaTrajetória no espaço, ela descreve uma curva, o comprimento desta curva entre dois instantes dado t0 e t1 se denominacomprimento de arco
ktzjtyitxdttf
b
a
b
a
b
a
b
a
))(())(())(()(
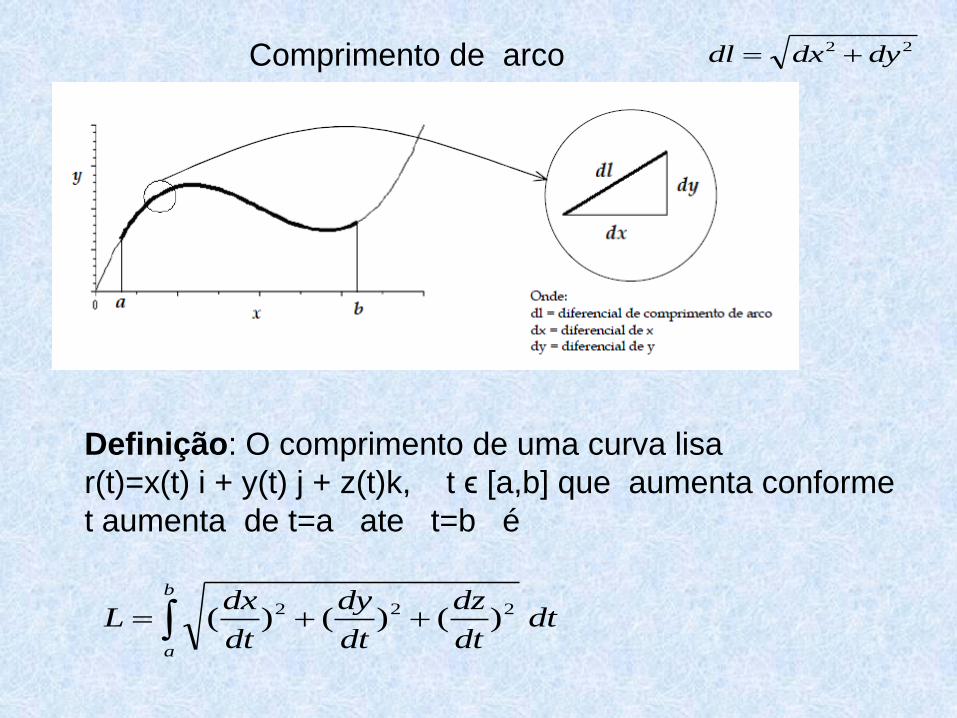
Comprimento de arco 22 dydxdl
Definição: O comprimento de uma curva lisa
r(t)=x(t) i + y(t) j + z(t)k, t ϵ [a,b] que aumenta conforme
t aumenta de t=a ate t=b é
dtdt
dz
dt
dy
dt
dxL
b
a
)()()( 222
Comprimento de arco
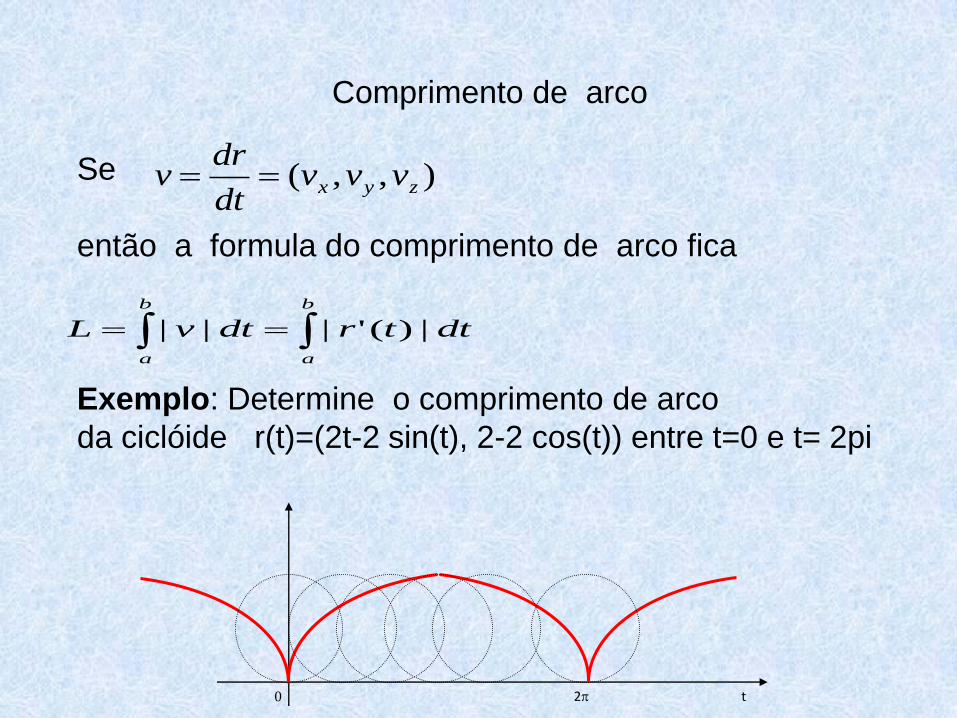
Se
então a formula do comprimento de arco fica
Exemplo: Determine o comprimento de arco
da ciclóide r(t)=(2t-2 sin(t), 2-2 cos(t)) entre t=0 e t= 2pi
0 2 t
),,( zyx vvvdt
drv
dttrdtvL
b
a
b
a
|)('|||
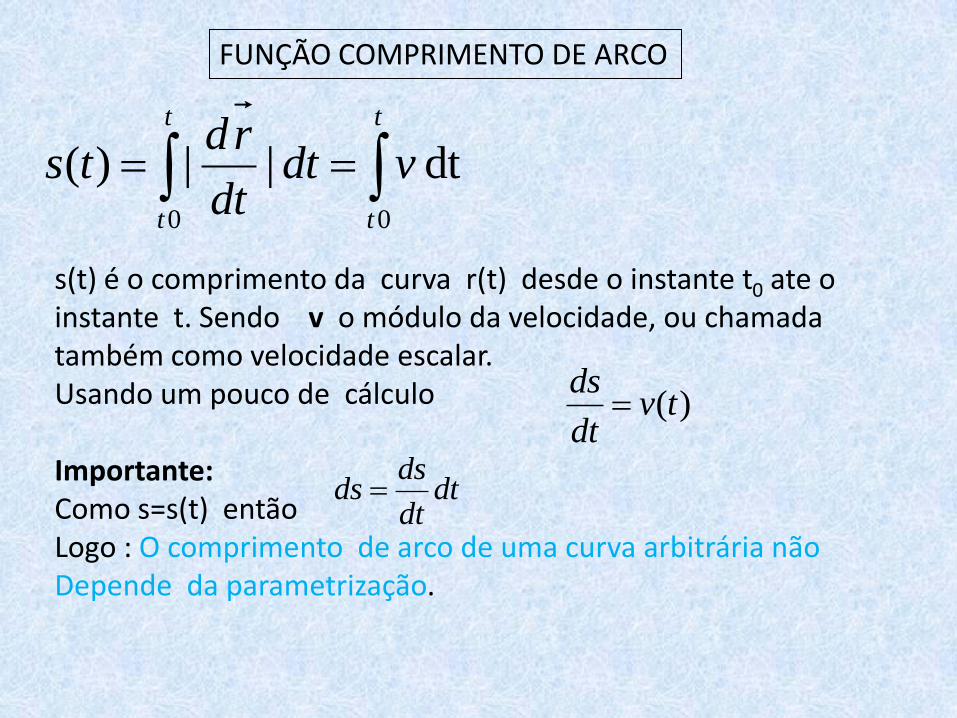
FUNÇÃO COMPRIMENTO DE ARCO
t
t
t
t
vdtdt
rdts
00
dt ||)(
)(tvdt
ds
s(t) é o comprimento da curva r(t) desde o instante t0 ate o instante t. Sendo v o módulo da velocidade, ou chamadatambém como velocidade escalar. Usando um pouco de cálculo
Importante:Como s=s(t) entãoLogo : O comprimento de arco de uma curva arbitrária nãoDepende da parametrização.
dtdt
dsds
ds || |)(
|
1
0
1
0
st
tds
rddt
dt
trdL
“O comprimento de arco de uma curva entre dois pontos é invariante pela reparametrização”
Exercícios1.- estude a continuidade da função vetorial f(t)=(2t-2sin(t),2-2cos(t)) no ponto t=2pi.2.- Determine o limite da função vetorial f(t)=(2t3,4t2,3t+4) quando t se aproxima a t0=1.3.-Do exercício anterior determine f´(t) para todo t ϵ R. qual é o ângulo que forma o vetor f´(t) como o vetor f(t) no instante t.4.-Determine a função comprimento de arco s(t) para a ciclóide do exercício 2.
TRAJETÓRIA DE UMA PARTÍCULA EM CAMPOS
ELÉTRICOS E MAGNÉTICOS
http://www.phy.ntnu.edu.tw/ntnujava/viewtopic.php?t=53
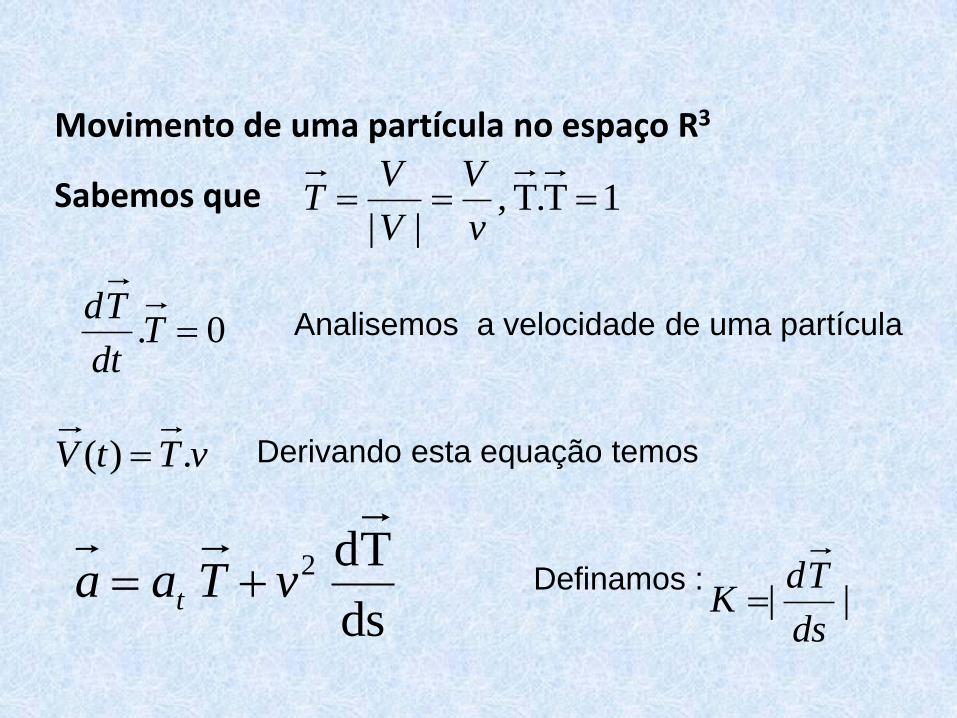
Movimento de uma partícula no espaço R3
Sabemos que 1T.T ,||
v
V
V
VT
0. Tdt
Td
vTtV .)(
Analisemos a velocidade de uma partícula
Derivando esta equação temos
ds
Td 2vTaa t Definamos :
||ds
TdK
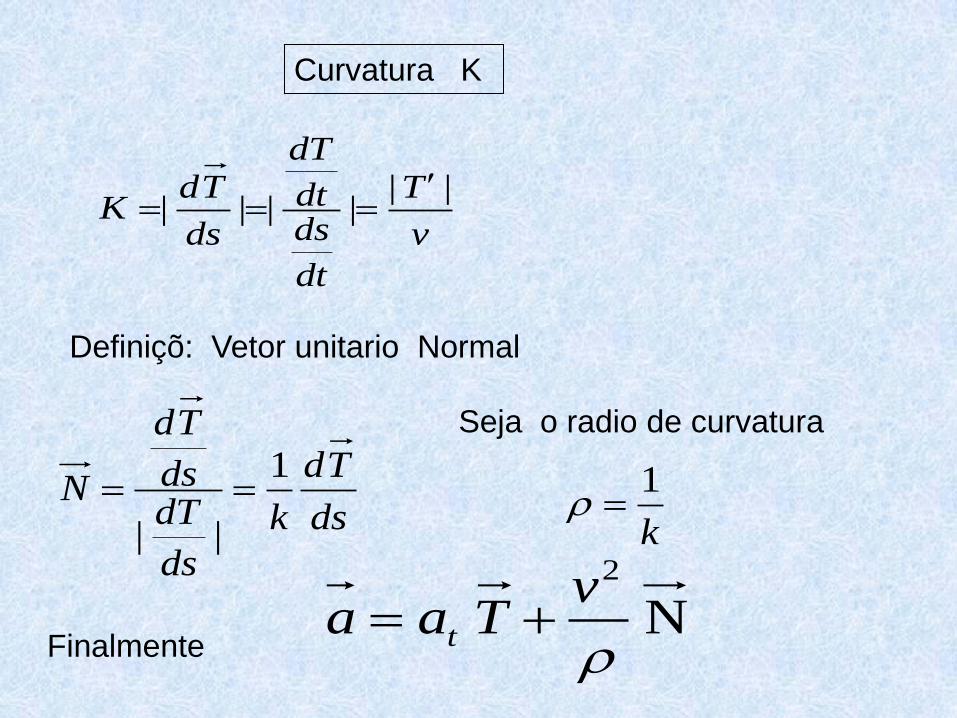
Curvatura K
v
T
dt
dsdt
dT
ds
TdK
||||||
Definiçõ: Vetor unitario Normal
ds
Td
k
ds
dTds
Td
N1
||
k
1
Seja o radio de curvatura
FinalmenteN
2
vTaa t
Aceleração instantâneaa
dt
dvaT Aceleração tangencial
2vacpta Aceleração centrípeta ou radial
Sempre orientada á parte concava
Da trajetória.
Triedro de Frenet-Serret
NTB Vetor binormal
Exercícios
1.- Provar que
2.- Provar que
3.- Provar que
1|| B
v
Va
V
VaaT
.
||
.
3
||
v
aVk
Exercícios.. Continua
4.- Em relação á ciclóide estudada no começo
a) Determine o vetor T, N,B para a ciclóide no instante
t=3pi/2.
b) Determine a aceleração tangencial e a aceleração
centrípeta para todo instante t. Particularize para
t=3pi/2
c) Determine a curvatura k(t) para todo instante de
Tempo.
c) Interprete seus resultados.
Exercícios.. Continua
5.- Seja uma partícula descrevendo uma helicóide
r(t)=(2cos(t), 2sen(t),2t) no espaço R3
a) Determine a velocidade e a aceleração instantânea
para todo instante t.
b) Determine o vetor unitario tangente T, para todo
instante t.
c) Determine a equação da reta tangente a helicóide no
Instante t=pi/4.
d) Determine a função comprimento de arco s(t) em
função do tempo t.
e) Determine a aceleração tangencial e a aceleração
centrípeta para todo instante t. Particularize para
t=pi/4.
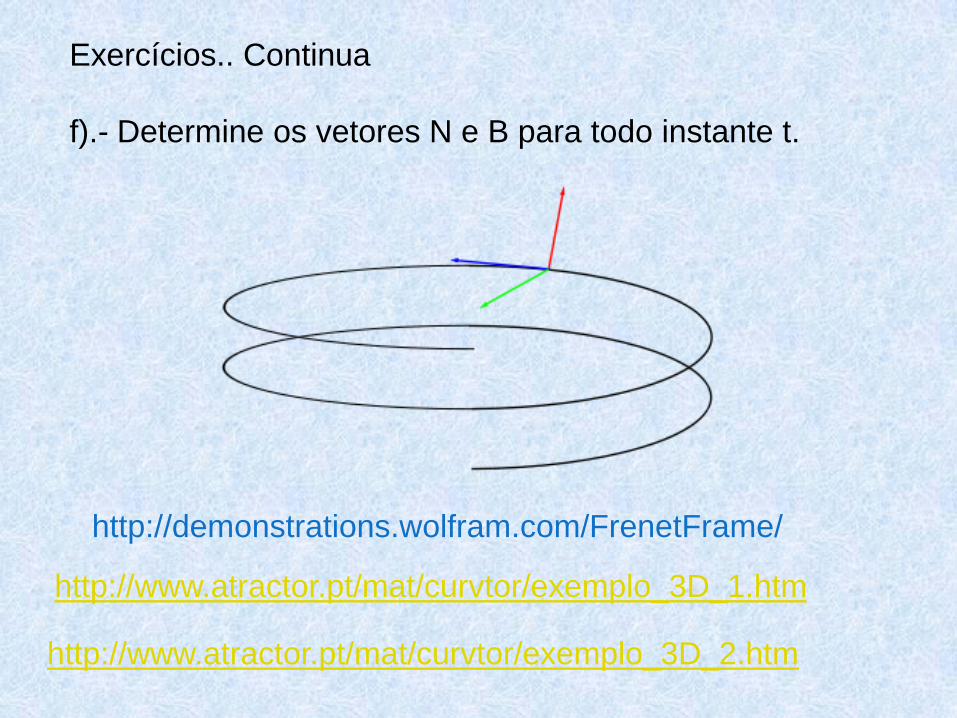
Exercícios.. Continua
f).- Determine os vetores N e B para todo instante t.
http://www.atractor.pt/mat/curvtor/exemplo_3D_2.htm
http://www.atractor.pt/mat/curvtor/exemplo_3D_1.htm
http://demonstrations.wolfram.com/FrenetFrame/
Equação de um plano.
Seja um plano M imerso no espaço euclidiano R3 onde
n é um vetor perpendicular ao plano M, então
conhecendo um ponto Po=(xo,yo,zo) que pertence ao
plano P, podemos determinar a equação algébrica que
obedece todos os pontos (x,y,z) do plano M.
Basicamente, ela disse que toda reta contida no plano
(ou todo vetor contido no plano), é perpendicular ao
vetor normal n.
dado n=(a,b,c)
0. PPn o(O produto escalar entre n e P0P é nulo)
Seja P=(x,y,z) um ponto arbitrario do plano M
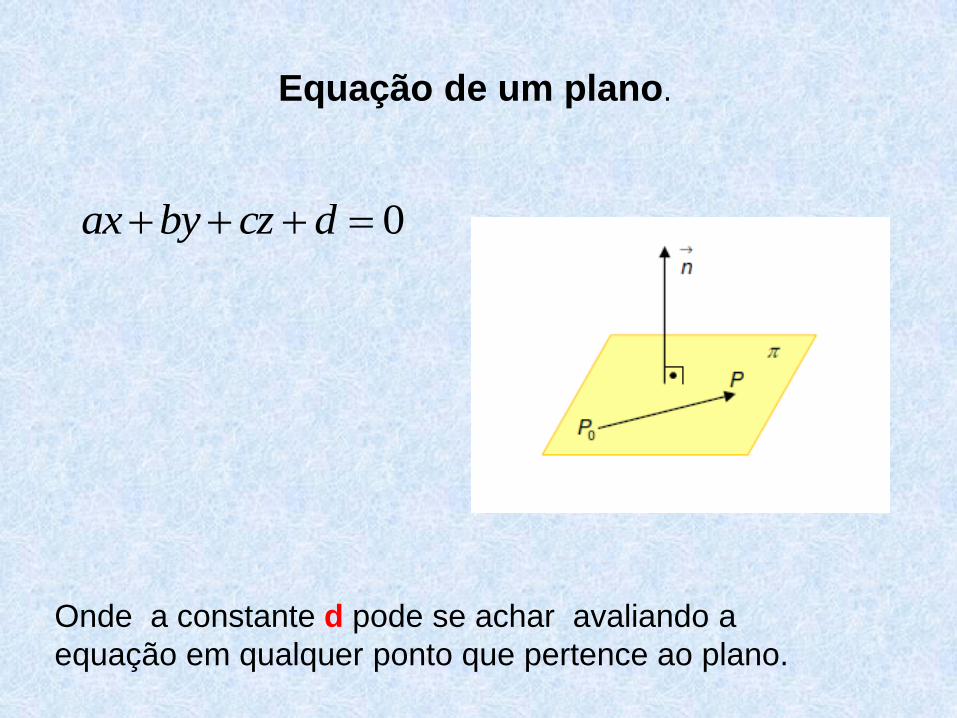
Equação de um plano.
Onde a constante d pode se achar avaliando a
equação em qualquer ponto que pertence ao plano.
0 dczbyax
r
n
C
A
José Maria
Plano_08
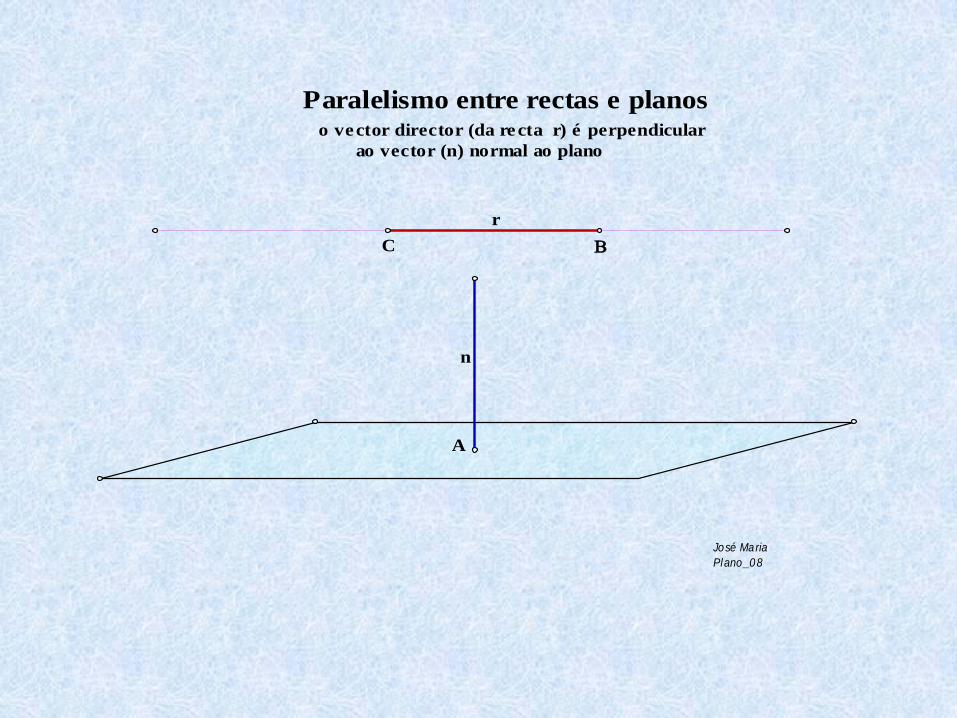
Paralelismo entre rectas e planos o vector director (da recta r) é perpendicular
ao vector (n) normal ao plano
n
s
A
D
C
José Maria
Plano_09
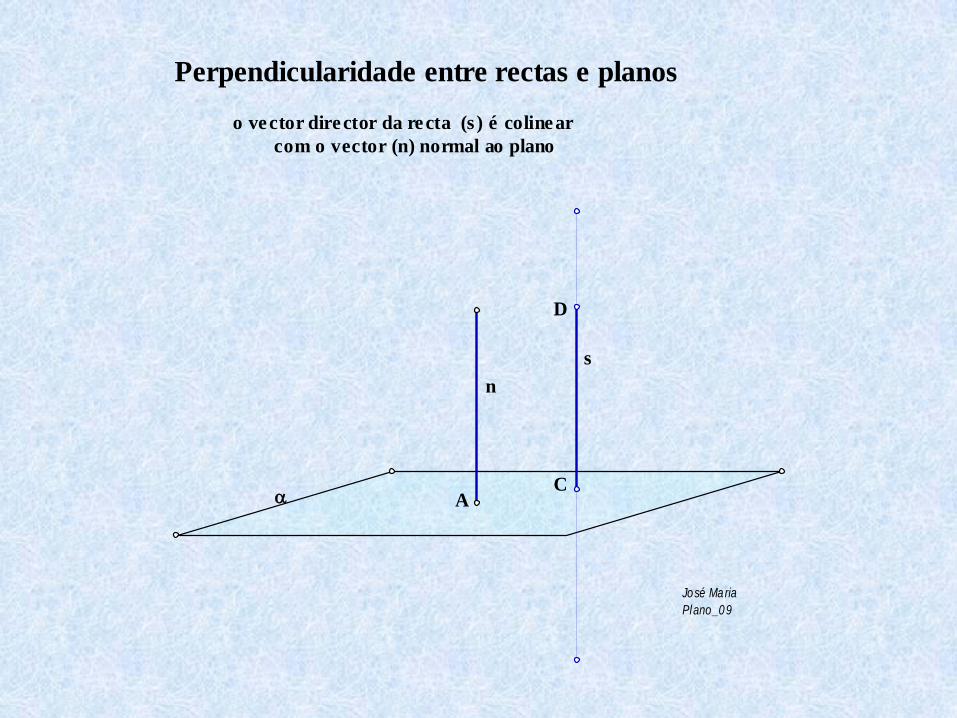
Perpendicularidade entre rectas e planos
o vector director da recta (s ) é colinear
com o vector (n) normal ao plano
n
p
José Maria
P lano_10
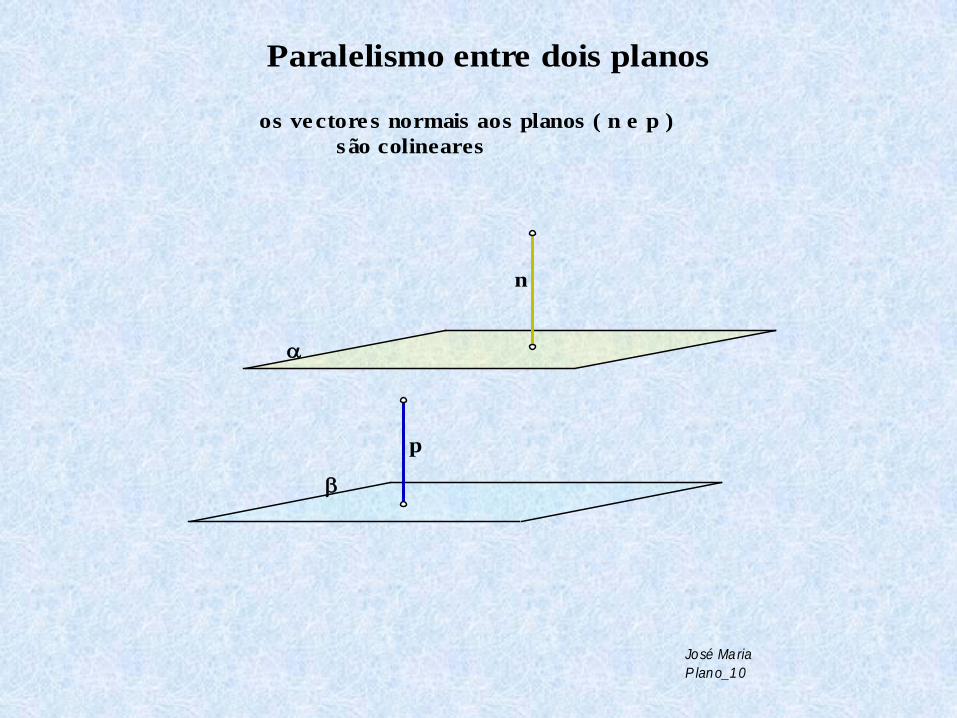
Paralelismo entre dois planos
os vectores normais aos planos ( n e p )
são colineares
n
p
José Maria
P lano_10
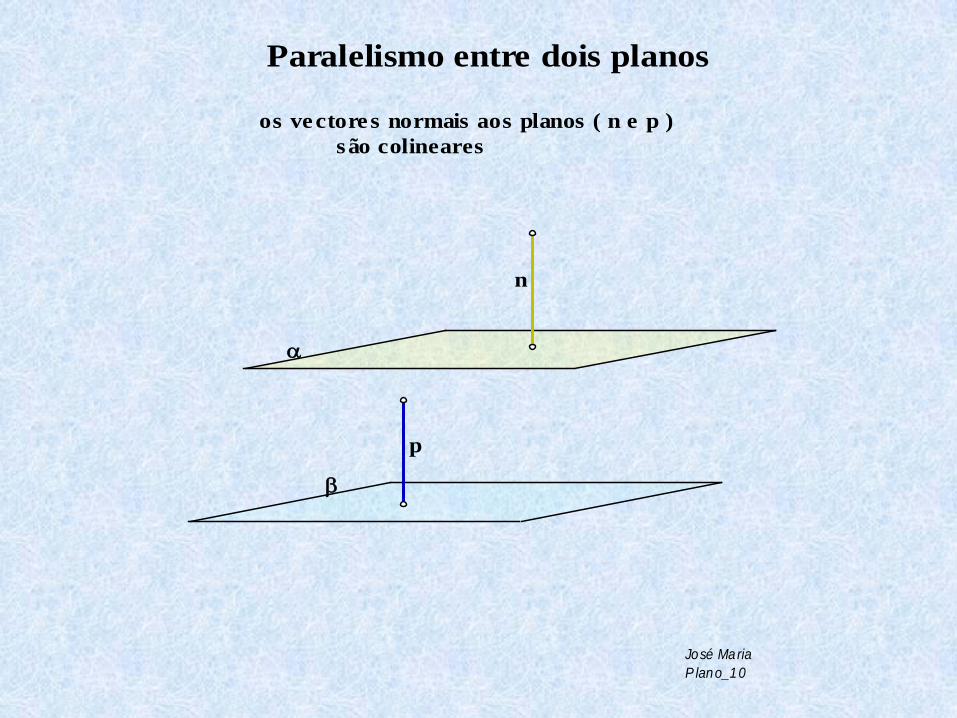
Paralelismo entre dois planos
os vectores normais aos planos ( n e p )
são colineares
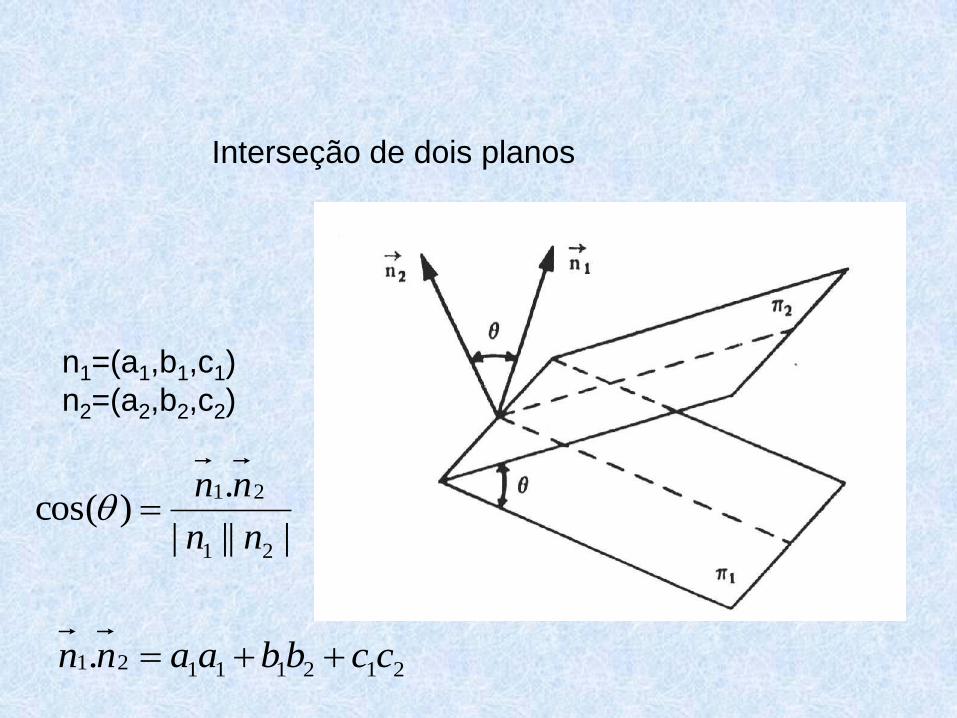
Interseção de dois planos
n1=(a1,b1,c1)
n2=(a2,b2,c2)
||||
.)cos(
21
21
nn
nn
21211121. ccbbaann
Exercícios.
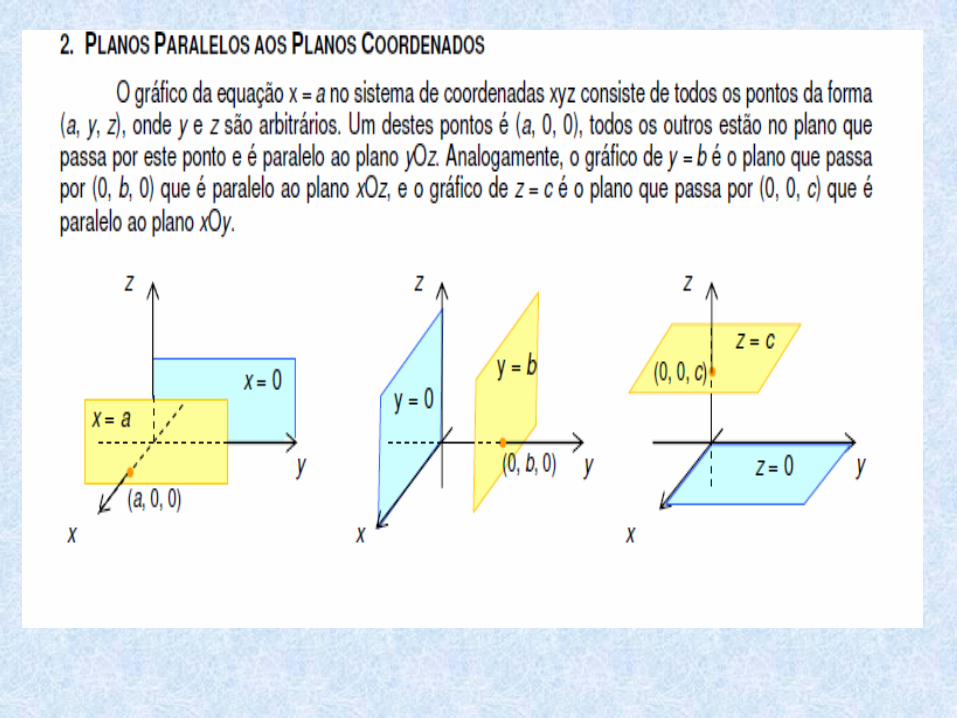
Exercício 1.- Seja M um plano paralelo ao plano xy
localizada a uma distancia c da origem de coordenadas.
Determine a equação deste plano.
Exercício 2.-Encontre a distancia do ponto Q=(1,2,1)
ao plano M com equação x+y+z=6
Exercício 3.- Seja os planos
M1 : 3x+2y+z+4=0, M2: z=0,
a) Determine o ângulo entre estes planos
b) Determine a equação da reta proveniente da
interseção dos dois planos.
http://www.educ.fc.ul.pt/icm/icm2001/icm23/geometriaeuclid
eana.htm
Site recomendado para entender melhor a geometria euclidiana