
Disciplina: Cálculo Diferencial e Integral...
43
1 Disciplina: Cálculo Diferencial e Integral III Prof. Dr. Antônio de Andrade e Silva UFPB – Tutor de EAD Curso de Matemática – UFPBVIRTUAL [email protected] Ambiente Virtual de Aprendizagem: Moodle www.ead.ufpb.br Site do Curso: www.mat.ufpb.br/ead Site da UFPBVIRTUAL: www.virtual.ufpb.br Telefone UFPBVIRTUAL (83) 3216 7257 Carga horária: 90 horas Créditos: 06 Ementa Funções reais de várias variáveis reais, Diferenciabilidade, Funções implícitas e transformações, Integrais múltiplas, Integrais de linha e de superfície. Descrição Esta disciplina tem como objetivo levar o aluno a compreender os conceitos de derivada e integral de funções reais de várias variáveis reais e de campos vetoriais ao ponto de aplicá-los em diferentes contextos tais como o estudo do comportamento de funções, esboço de curvas e de superfícies, modelagem de situações-problema envolvendo máximos e mínimos, taxa de variação, comprimento de arco, cálculo de áreas e volumes, trabalho realizado por uma força, com ênfase no cálculo de derivadas, integrais e gráficos utilizando ferramentas computacionais. O programa da disciplina divide-se em seis unidades, das quais a primeira é responsável pela introdução de conceitos e resultados utilizados em todo o texto. Em cada estudo específico, busca-se a caracterização da função por meio de propriedades que possibilitem ao estudante estabelecer correspondências entre determinadas situações-problema da vida real e a espécie de função focalizada, objetivando sua utilização na construção de uma tradução matemática da respectiva situação. Objetivos Levar o aluno dos cursos de graduação das áreas científica e tecnológica à compreensão dos conceitos de derivada e de integração de função de várias variáveis e ao seu uso na modelagem e resolução de problemas dessas áreas utilizando ferramentas computacionais. Objetivos Específicos Ao final do curso, espera-se que o aluno esteja apto a: Construir o conceito de derivada parcial, de diferenciabilidade e derivação implícita de uma função de real de várias variáveis reais, compreender as suas diferentes representações e aplicá- lo a problemas relacionados; Construir o conceito de integral múltipla de uma função real de várias variáveis reais, ter ideia clara das suas diferentes representações e aplicá-lo a problemas relacionados; Esboçar gráficos e calcular derivadas, integrais de funções reais de várias variáveis reais, incorporar recursos computacionais como ferramenta auxiliar; Elaborar modelos matemáticos utilizando funções reais de varias variáveis reais, suas derivadas parciais e resolvê-los; Esboçar gráficos de campos vetoriais tais como, campos gradiente e campo rotacional; Interpretar os Teoremas de Stokes e de Green; Ler, interpretar e comunicar ideias matemáticas.
Transcript of Disciplina: Cálculo Diferencial e Integral...
1
Disciplina: Cálculo Diferencial e Integral III Prof. Dr. Antônio de Andrade e Silva UFPB – Tutor de EAD
Curso de Matemática – UFPBVIRTUAL [email protected]
Ambiente Virtual de Aprendizagem: Moodle www.ead.ufpb.br
Site do Curso: www.mat.ufpb.br/ead Site da UFPBVIRTUAL: www.virtual.ufpb.br
Telefone UFPBVIRTUAL (83) 3216 7257 Carga horária: 90 horas Créditos: 06 Ementa
Funções reais de várias variáveis reais, Diferenciabilidade, Funções implícitas e transformações, Integrais múltiplas, Integrais de linha e de superfície. Descrição
Esta disciplina tem como objetivo levar o aluno a compreender os conceitos de derivada e integral de funções reais de várias variáveis reais e de campos vetoriais ao ponto de aplicá-los em diferentes contextos tais como o estudo do comportamento de funções, esboço de curvas e de superfícies, modelagem de situações-problema envolvendo máximos e mínimos, taxa de variação, comprimento de arco, cálculo de áreas e volumes, trabalho realizado por uma força, com ênfase no cálculo de derivadas, integrais e gráficos utilizando ferramentas computacionais.
O programa da disciplina divide-se em seis unidades, das quais a primeira é responsável pela introdução de conceitos e resultados utilizados em todo o texto. Em cada estudo específico, busca-se a caracterização da função por meio de propriedades que possibilitem ao estudante estabelecer correspondências entre determinadas situações-problema da vida real e a espécie de função focalizada, objetivando sua utilização na construção de uma tradução matemática da respectiva situação.
Objetivos
Levar o aluno dos cursos de graduação das áreas científica e tecnológica à compreensão dos conceitos de derivada e de integração de função de várias variáveis e ao seu uso na modelagem e resolução de problemas dessas áreas utilizando ferramentas computacionais. Objetivos Específicos
Ao final do curso, espera-se que o aluno esteja apto a:
Construir o conceito de derivada parcial, de diferenciabilidade e derivação implícita de uma função de real de várias variáveis reais, compreender as suas diferentes representações e aplicá-lo a problemas relacionados;
Construir o conceito de integral múltipla de uma função real de várias variáveis reais, ter ideia clara das suas diferentes representações e aplicá-lo a problemas relacionados;
Esboçar gráficos e calcular derivadas, integrais de funções reais de várias variáveis reais, incorporar recursos computacionais como ferramenta auxiliar;
Elaborar modelos matemáticos utilizando funções reais de varias variáveis reais, suas derivadas parciais e resolvê-los;
Esboçar gráficos de campos vetoriais tais como, campos gradiente e campo rotacional; Interpretar os Teoremas de Stokes e de Green; Ler, interpretar e comunicar ideias matemáticas.
2
Conhecimentos Prévios
Vetores, Produtos escalar e vetorial, Ângulo entre vetores, Equações da reta e do plano, Cônicas e quádricas, Limites e continuidade de funções reais de uma variável real, Derivadas de funções reais de uma variável real, Integrais de funções reais de uma variável real, coordenadas polares e comprimento de arco.
Unidades Temáticas Integradas Unidade I Funções Reais de Várias Variáveis Reais
Conceitos topológicos Conceito de função real de várias variáveis reais Limites e continuidade
Unidade II Diferenciabilidade
Conceito de derivada parcial Diferenciabilidade Regra da cadeia Derivada direcional e gradiente
Unidade III Aplicações das Derivadas Parciais
Máximos e mínimos Multiplicadores de Lagrange Derivadas de funções implícitas Transformações
Unidade IV Integrais Múltiplas
Integrais duplas Mudança de variáveis em integrais duplas Integrais triplas
Unidade V Integrais de Linha
Campos vetoriais Funções vetoriais Integrais de linha Independência do caminho
Unidade VI Integrais de Superfície
Superfície regulares Integrais de superfície Teorema de Green Teorema de Gauss Teorema de Stokes

3
Unidade I Funções Reais de Várias Variáveis Reais 1. Situando a Temática
Quando falamos que uma coisa é função de outra, queremos dizer, simplesmente, que a primeira delas depende da segunda. Situações de dependência, ou vinculação, fazem-se presentes constantemente em nossa vida. Por exemplo, a área de um triângulo é igual a um meio da base vezes a altura, ou seja, depende da base e da altura do triângulo.
A partir de agora, você está convidado a nos acompanhar neste passeio pelo mundo das funções reais de várias variáveis reais. Juntos analisaremos detalhadamente suas regras, conheceremos domínios, gráficos e curvas de nível, verdadeiras ferramentas de decoração utilizadas para exposição de mapas, e aprenderemos os conceitos de limites e continuidade de funções reais de várias variáveis reais. 2. Problematizando a Temática
No nosso dia-a-dia as funções reais de várias variáveis reais independentes aparecem com mais
frequência do que as funções reais de uma variável real, e seu cálculo é ainda mais extenso. Suas derivadas são mais variadas e mais interessantes por causa das diferentes maneiras como as variáveis podem interagir. Considere, por exemplo, uma placa metálica circular com um metro de raio, colocada com centro em
= (0,0)O do plano xy e seja aquecida, de modo que a temperatura em um ponto = ( , )P x y seja dada por ( , ) (16 ² 24 40 ²) CT x y x x y= + + o ,
com x e y em metros. Determine os pontos de menor e maior temperatura da placa. 3. Conhecendo a Temática
3.1 Conceitos topológicos
Nesta seção introduzimos os conceitos topológicos importantes para o estudo de funções reais de várias variáveis reais, mais precisamente funções cujo domíno é um subconjunto nX ⊆ R e cuja imagem está contida em R , com ênfase no plano cartesiano e no espaço. É pertinente lembrar que é de extrema importância em matemática, sempre que possível, esboçar graficamente um conjunto (ou um gráfico de uma equação ou inequação) para termos uma ideia geométrica do mesmo.
Um conjunto de pontos ou simplesmente um conjunto X em nR , com = 2n ou 3 , é qualquer coleção de pontos finita ou infinita.
Exemplo 1.1 Os conjuntos
2 2 2 2= {(1,0), (0,1)}, = {( , ) : = } e = {( , ) : < 1}X Y x y y x Z x y x y∈ ∈ +R R são conjuntos de pontos no plano cartesiano 2 = ×R R R .
Dados um ponto = ( , )P a b X∈ e um número real > 0δ , chama-se vizinhança delta (circular) de P , em símbolos ( )V Pδ , ao conjunto de todos pontos = ( , )Q x y X∈ tais que
2 2= ( , ) = ( ) ( ) < ,Q P d P Q x a y b δ− − + − isto é,
( ) = { : < }.V P Q X Q Pδ δ∈ −
Chama-se vizinhança delta (retangular) de P ao conjunto de todos pontos = ( , )Q x y X∈ tais que < e < ,x a x bδ δ− −
isto é, ( ) = {( , ) : < e < }.V P x y X x a x bδ δ δ∈ − −
A Figura 01 expõe graficamente a definição de vizinhança delta (circular) de P . Um conjunto X em nR chama-se aberto se para cada ponto P X∈ , existir uma vizinhança delta

4
de P toda contida em X , isto é, , ( ) tal que ( ) .P X V P V P Xδ δ∀ ∈ ∃ ⊆
Neste caso, diremos que todos os pontos de X são pontos interiores.
Exemplo 1.2 Os conjuntos 2 2 2 2= {( , ) : < 1} e = {( , ) : < 1 < 1}X x y x y Y x y x e y∈ + ∈R R
são conjuntos abertos em 2R , enquanto o conjunto 2= {( , ) : 0}Z x y y∈ ≥R
não é um conjunto aberto em 2R
Solução. Dado um ponto = ( , )P a b X∈ , existe uma vizinhança ( )V Pδ , com 2 2= 1 a bδ − + , tal que ( )V P Xδ ⊆ , pois se = ( , ) ( )Q x y V Pδ∈ , então
2 2 2 2= = ( ) ( ) < = 1.x y Q O Q P P O Q P P O a bδ+ − − − − ≤ − + − + +
Para provar que Z não é um conjunto aberto em 2R , basta observa que: para cada ponto = ( ,0)P a Z∈ , não existe uma vizinhança ( )V Pδ tal que ( )V P Zδ ⊆ .
Um ponto nP∈R é um ponto de fronteira de um conjunto X em nR se qualquer vizinhança delta de P contém pontos de X e pontos fora de X , isto é,
( ) e ( ) ( ) ,nV P X V P Xδ δ∩ ≠ ∅ ∩ − ≠ ∅R
com n X−R o complementar do conjunto X . A Figura 01 expõe graficamente a definição de ponto de fronteira de X .
Seja X um conjunto em nR . Chama-se fronteira de X , em símbolos ( )X∂ , o conjunto de todos os pontos de fronteira de X . Por exemplo,
2 2= {( , ) : > 0} ( ) = {( , ) : = 0}X x y y X x y y∈ ⇒ ∂ ∈R R e
2 2 2 2 2 2= {( , ) : < 1} ( ) = {( , ) : = 1}.X x y x y X x y x y∈ + ⇒ ∂ ∈ +R R Note que ( ) = ( )nX X∂ ∂ −R .
Um conjunto X em nR chama-se fechado se seu complementar n X−R for aberto. Por exemplo, 2 2 2= {( , ) : 1}X x y x y∈ + ≥R
é um conjunto fechado em 2R , pois seu complementar 2 2 2= {( , ) : < 1}n X x y x y− ∈ +R R
é um conjunto aberto em 2R . Um conjunto X em nR chama-se limitado se existir uma esfera de centro na origem O de nR e
raio suficientemente grande > 0r , em símbolos ( )rC O , tal que ( ).rX C O⊆ Ou, equivalentemente, um bloco B , tal que .X B⊆ Por exemplo, o conjunto
2= {( , ) : 1 e 1 < 2}X x y x y∈ ≤ − ≤R
é um conjunto limitado em 2R , pois

5
2 2 23(0,0) = {( , ) : < 9},X C x y x y⊆ ∈ +R
Enquanto o conjunto 2= {( , ) : > 0}X x y x∈R
não é um conjunto limitado em 2R . Note que em 2R uma esfera é um círculo e um bloco é um retângulo. Um conjunto X em nR chama-se compacto se ele for fechado e limitado em nR . Por exemplo,
2= {( , ) : 1}X x y x y∈ + ≤R
é um conjunto compacto em 2R . Um ponto nP∈R é um ponto de acumulação de um conjunto X de nR se para qualquer número
real > 0δ , tem-se ( ( ) { }) .V P P Xδ − ∩ ≠ ∅ Por exemplo, 2= (0,0)P ∈R é um ponto de acumulação do conjunto
2= {( , ) : > 0}.X x y y∈R Note que P X∉ , observe também que qualquer ponto Q X∈ é um ponto de acumulação de
2= {( , ) : > 0}.X x y y∈R Enquanto o conjunto Z não possui pontos de acumulação, pois dado x∈Z , existe 1δ = tal que ( ( ) { }) .V x xδ − ∩ =∅Z Um ponto P X∈ que não é ponto de acumulação de X chama-se um ponto discreto ou isolado.de X .
Um conjunto X em nR chama-se conexo se quaisquer dois pontos distintos ,P Q X∈ podem ser ligados por uma linha poligonal toda contida em X , por linha poligonal significa uma “curva” constituída de um número finito de segmentos retilíneos em sucessão tais que a extremidade de cada um coincida com a origem do seguinte. Por exemplo, o conjunto
2 2 2= {( , ) :1 < < 4}X x y x y∈ +R é um aberto conexo em 2R . Note que um aberto conexo não pode ser formado por dois conjuntos abertos disjuntos. Assim, o conjunto
2= {( , ) : > 0}X x y x∈R não é conexo, pois
2 2= {( , ) : < 0} {( , ) : > 0}.X x y x x y x∈ ∪ ∈R R Um conjunto X em nR chama-se uma região se X é um aberto conexo mais alguns ou todos os
seus pontos de fronteiras. Uma região X é simplesmente conexa se qualquer curva fechada em X pode ser deformada com continuidade até se reduzir a um ponto sem sair de X . Por exemplo,
2= {( , ) : 1 e 1 < 2}X x y x y∈ ≤ − ≤R é uma região simplesmente conexa. 3.2 Funções reais de várias variáveis reais
O conceito de função real de duas ou mais variáveis reais é análogo ao conceito de função real de uma variável real visto no Cálculo Diferencial e Integral I. Por exemplo, a equação 2 2=z y x− exprime z como função de x e y . Em geral, z é uma função de x e y se existir uma regra f que a cada ponto
= ( , )P x y de um conjunto X em 2R associar um único ponto z∈R . A Figura 02 expõe graficamente a definição de uma função de X em R . Para indicar a conexão entre x , y e z usualmente escreve-se
= ( , )z f x y ou = ( , )z z x y .

6
Escreveremos : nf X ⊆ →R R ou, simplesmente, :f X → R para indicar que f é uma função com domínio X e contradomínio R . Se = ( , )z f x y , diremos que z é o valor ou a imagem de x e y com respeito a f . Às vezes, as funções : nf X ⊆ →R R são chamadas de funções escalares.
Exemplo 2.1 Seja 2:f X ⊆ →R R a função definida pela regra
2 21( , ) = log 1 49
f x y x y⎛ ⎞− −⎜ ⎟⎝ ⎠
.
Qual o domínio de ?f Solução. Já vimos, no Ensino Médio, que o domínio da função log x é conjunto de todos os x∈R , com
> 0x . Logo, o domínio da função ( , )f x y é o conjunto de todos os pontos ( , )x y em 2R tais que
2 211 4 > 0.9
x y− −
Portanto, 2 2 2= {( , ) : 36 < 9}X x y x y∈ +R
é o domínio da função ( , )f x y . Seja 2:f X ⊆ →R R uma função. Chama-se gráfico de f ao conjunto de todos os pontos
3( , , )x y z ∈R tais que = ( , )z f x y , isto é, 3( ) = {( , , ) : = ( , )}.G f x y z z f x y∈R
Chama-se imagem de f ao conjunto
( ) = { : = ( , ), para algum ponto ( , ) }.Im f z z f x y x y X∈ ∈R
É importante notar que, o gráfico de uma função real de duas variáveis reais representa uma superfície. A Figura 03 (a) expõe graficamente a definição do gráfico de uma função 2:f X ⊆ →R R .
Sejam 2:f X ⊆ →R R uma função e = ( , )z f x y . Quando atribuirmos a z um valor constante
k , o conjunto de todos os pontos ( , )x y X∈ tais que =z k geram, em geral, uma curva kC , chamada de curva de nível da função f correspodendo ao valor k . Note que a curva kC está contida no domínio da função, ou seja, kC X⊆ . A Figura 03 (b) expõe graficamente uma curva de nível gerada pelo gráfico de
uma função 2:f X ⊆ →R R . Sejam 3:f X ⊆ →R R uma função e = ( , , )w f x y y . Quando atribuirmos a w um valor

7
constante k , o conjunto de todos os pontos ( , , )x y z X∈ tais que =w k geram, em geral, uma superfície
kS , chamada de superfície de nível da função f correspondente ao valor k .
Exemplo 2.2 Seja 2:f →R R a função definida pela regra 2 2( , ) =f x y y x− . Determine algumas curvas de nível da função f . Solução. As curvas de nível da função f no plano xy correspondem aos gráficos da equação
2 2 = , .y x k k− ∀ ∈R Como o conjunto dos números reais R é totalmente ordenado, há três casos a serem considerados: 1.o Caso. Se > 0k , então 2 2 =y x k− é uma hipérbole com vértices ( )0, k± .
2.o Caso. Se = 0k , então 2 2 =y x k− são duas retas passando pela origem = (0,0)O de 2R , ou seja, =y x e =y x− .
3.o Caso. Se < 0k , então 2 2 =y x k− é uma hipérbole com vértices ( ),0k± . Algumas curvas de nível e
o gráfico da função estão expostas na Figura 04.
3.3 Limites e continuidade
Nesta seção apresentaremos, de um ponto de vista intuitivo e/ou formal, as ideias básicas sobre limites que serão necessárias na formulação dos conceitos de continuidade, diferenciabilidade e integrabilidade de uma função real de várias variáveis reais.
Já vimos, no Cálculo Diferencial e Integral I, que uma função real de uma variável real :f I ⊆ →R R tem limite L , em símbolos
( ) = ,limx a
f x L→
se dado um número real > 0ε , existe em correspondência um > 0δ tal que , 0 < < ( ) < .x I x a f x Lδ ε∈ − ⇒ −
Devemos lembrar que a notação x a→ significa que x está muito próximo de a , mas x a≠ . Esse conceito de limite pode ser estendido de modo análogo a uma função real de duas ou mais
variáveis reais, por exemplo, se 2:f X ⊆ →R R , então
( , ) ( , )( , ) =lim
x y a bf x y L
→
significa que: dado um número real > 0ε , existe em correspondência um > 0δ tal que 2 2( , ) , 0 < ( ) ( ) < ( , ) < .x y X x a y b f x y Lδ ε∈ − + − ⇒ −
Assim, com alguns ajustes de ordem técnica, todas as propriedades de limites para funções reais de uma variável real valem para funções reais de duas ou mais variáveis reais.
Exemplo 3.1 Mostre, usando a definição de limite, que: 1.
( , ) (2,1)(2 ) = 5lim
x yx y
→+ .

8
2. 2
( , ) (1,2)(3 ) = 5lim
x yx y
→+ .
Solução.(1) Devemos provar que: dado > 0ε , existe um > 0δ tal que
2 20 < ( 2) ( 1) < 2 5 < .x y x yδ ε− + − ⇒ + − Para resolver esse problema vamos dividir a prova em dois passos: 1.o Passo. O número δ depende da escolha do número ε . Assim, para determinar o possível δ , devemos estudar a desigualdade que envolve ε , isto é,
2 5 < .x y ε+ − Note que
2 5 = 2( 2) ( 1) 2 2 1 .x y x y x y+ − − + − ≤ − + − Como
2 2 2 2 2 22 = ( 2) ( 2) ( 1) e 1 = ( 1) ( 2) ( 1)x x x y y y x y− − ≤ − + − − − ≤ − + − temos que
2 5 2 2 1 < 2 = 3 .x y x y δ δ δ+ − ≤ − + − +
2.o Passo. Verificação da nossa escolha do δ . Dado > 0ε , basta escolher um =3εδ tal que
2 20 < ( 2) ( 1) < 2 5 < .x y x yδ ε− + − ⇒ + − De fato,
2 2( 2) ( 1) < 2 < e 1 < .x y x yδ δ δ− + − ⇒ − − Logo,
2 < 2 2 < 2 .x xδ δ− ⇒ − Assim,
2 5 2 2 1 < 2 = 3 < .x y x y δ δ δ ε+ − ≤ − + − +
Portanto, ( , ) (2,1)(2 ) = 5lim x y x y→ + . Note que, usando teoremas sobre limites,
( , ) (2,1) ( , ) (2,1) ( , ) (2,1)(2 ) = (2 ) ( ) = 4 1 = 5lim lim lim
x y x y x yx y x y
→ → →+ + + .
( 2 ) Devemos provar que: dado > 0ε , existe um > 0δ tal que
2 2 20 < ( 1) ( 2) < 3 5 < .x y x yδ ε− + − ⇒ + −
Para resolver esse problema vamos dividir a prova em dois passos: 1.o Passo. O número δ depende da escolha do número ε . Assim, para determinar o possível δ , devemos estudar a desigualdade que envolve ε , isto é,
23 5 < .x y ε+ −
Note que, 2 2 23 5 = 3( 1) ( 2 3 1 2 = 3 1 1 2 .x y x y x y x x y+ − − + − ≤ − + − − + + −
Restringindo ( , )x y a vizinhança unitária ( , ) (1, 2) 1f x y f− < ,
obtemos 2 •3 5 3 1 1 2 < 3 3 = 10 ,x y x x y δ δ δ+ − ≤ − + + − +
pois 1 = 1 2 1 2 < 3x x x+ − + ≤ − + .

9
2.o Passo. Verificação da nossa escolha do δ . Dado > 0ε , basta escolher um = min{1, }10εδ tal que
2 2 20 < ( 1) ( 2) < 3 5 < .x y x yδ ε− + − ⇒ + −
De fato, 2 2( 1) ( 2) < 1 < e 2 < .x y x yδ δ δ− + − ⇒ − −
Logo, 1 < 3 1 1 < 9 .x x xδ δ− ⇒ − +
Assim, 23 5 3 1 1 2 < 9 = 10 < .x y x x y δ δ δ ε+ − ≤ − + + − +
Portanto, 2( , ) (1,2)(3 ) = 5lim x y x y→ + .
Vimos acima que o cálculo do limite por meio da definição pode ser tedioso se f tem uma
expressão complicada. Assim, apresentaremos algumas técnicas, além das propriedades de limite já vistas no curso de Cálculo Diferencial e Integral I, que serão úteis para determinar se uma dada função tem ou não limite em um ponto.
Já vimos que ( )lim x a f x→ existe quando o limite pela esquerda ( )lim x a f x−→ e pela direita ( )lim x a f x+→ existem e são iguais. Esse procedimento não se aplica às funções reais de duas ou mais
variáveis reais, pois existem uma quantidade infinita de caminhos para chegarmos em um ponto, mas ele serve como um guia para apresentarmos um candidato ao limite ou não. Lembre que se o limite existe, ele é único.
Os limites iterados
( )( , ) ( , )lim lim lim limx a y b y b x a
f x y e f x y→ → → →
⎛ ⎞⎜ ⎟⎝ ⎠
não são necessariamente iguais. No entanto, devem ser iguais para que o limite ( , ) ( , ) ( , )lim x y a b f x y→ exista, mas sua igualdade não garante a existência deste limite.
Exemplo 3.2 Determine se o limite
( , ) (0,0)lim
x y
x yx y→
−+
existe. Solução. Note que não podemos aplicar diretamente as propriedades, pois
( , ) (0,0)
( , ) (0,0) ( , ) (0,0)
( ) 0lim= = .lim ( ) 0limx y
x y x y
x yx yx y x y
→
→ →
−−+ +
o que é uma "forma indeterminada". Assim, devemos tentar outras formas de calcular o limite
( , ) (0,0)lim
x y
x yx y→
−+
.
Neste caso,
0 0 0 0 0 0= (1) = 1 = ( 1) = 1.lim lim lim lim lim lim
x y x y x y
x y x yex y x y→ → → → → →
⎛ ⎞ ⎛ ⎞− −− −⎜ ⎟ ⎜ ⎟+ +⎝ ⎠ ⎝ ⎠
Logo, os limites iterados são diferentes. Portanto, o limite não existe.
Exemplo 3.3 Determine se o limite
2 2
2 2( , ) (0,0)
limx y
x yx y→
−+
existe.

10
Solução. Note que 2 2 2 2
2 2 2 20 0 0 0 0 0
= (1) = 1 e = ( 1) = 1.lim lim lim lim lim limx y x y x y
x y x yx y x y→ → → → → →
⎛ ⎞ ⎛ ⎞− −− −⎜ ⎟ ⎜ ⎟+ +⎝ ⎠ ⎝ ⎠
Logo, os limites iterados são diferentes. Portanto, o limite não existe.
Exemplo 3.4 Determine se o limite
2 2
3 3( , ) (0,0)
limx y
x yx y→ +
existe. Solução. Para resolver esse problema devemos primeiro verificar se o limite é o mesmo por vários caminhos diferentes do plano para o ponto = (0,0)P . Em seguida aplica-se a definição para comprovar. Note que
2 2 2 2
3 3 3 30 0 0 0 0 0
= (0) = 0 e = (0) = 0.lim lim lim lim lim limx y x y x y
x y x yx y x y→ → → → → →
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟+ +⎝ ⎠ ⎝ ⎠
Logo, os limites iterados são iguais. 1.o Caminho. Ao longo da reta =y mx , com 0x ≠ . Note que 0 0x y→ ⇒ → ,
2 2 2 2 2 4 2 2
3 3 3 3 3 3 3 3( , ) (0,0) 0 0 0
= = = = 0.lim lim lim lim(1 ) 1x y x x x
x y x m x x m xmx y x m x x m m→ → → →+ + + +
2.o Caminho. Ao longo do curva = xy xe−− . Note que 0 0x y→ ⇒ → ,
2 2 2 2 2 4 2 2
3 3 3 3 3 3 3 3( , ) (0,0) 0 0 0
= = = .lim lim lim lim(1 ) 1
x x x
x x xx y x x x
x y x x e x e xex y x x e x e e
− − −
− − −→ → → →+ − − −
Observe que como
2
30
0=lim1 0
x
xx
xee
−
−→ −
temos uma indeterminação. Assim, pela Regra de L'Hôpital,
2 2 2 2
3 3 30 0 0
2 (1 2 ) 1= = = .lim lim lim1 3 3 3
x x x x
x x xx x x
xe e xe e xe e e
− − − −
− − −→ → →
+ +−
Portanto, o limite não existe.
Um resultado visto no curso de Cálculo Diferencial e Integral I muito útil para a determinação do limite de uma função é o seguinte: se ( ) = 0limx a f x→ e ( )g x é limitada, então ( ) ( ) = 0limx a f x g x→ .
Exemplo 3.5 Determine se o limite
2 2( , ) (0,0)lim
x y
xyx y→ +
existe. Solução. Sejam ( , )r θ as coordenadas polares do ponto ( , )x y . Então cosx r θ= e y rsenθ= . Como

11
2 2r x y= + temos que 0r → quando 0x → e 0y → . Portanto,
2 2( , ) (0,0) 0= cos = 0,lim lim
x y r
xy r senx y
θ θ→ →+
pois cos 1senθ θ ≤ .
Exemplo 3.6 Determine se o limite 2
2 2( , ) (0,0)
3lim
x y
x yx y→ +
existe. Solução. Sejam
2
2 2( , ) = 3 e ( , ) = .xf x y y g x yx y+
Então ( , ) (0,0) ( , ) = 0lim x y f x y→ e ( , )g x y é limitada, pois ( , ) < 1g x y . Portanto, 2
2 2( , ) (0,0) ( , ) (0,0)
3 = ( , ) ( , ) = 0.lim limx y x y
x y f x y g x yx y→ →+
Sejam 2:f X ⊆ →R R uma função e = ( , )P a b X∈ fixado, com X um conjunto aberto.
Diremos que f é contínua no ponto P se as seguintes condições são satisfeitas:
1. ( , ) ( , )
( , )limx y a b
f x y→
existe, isto é, ( , ) ( , )
( , )limx y a b
f x y→
é um número real.
2. ( , ) ( , )
( , ) = ( , )limx y a b
f x y f a b→
.
Neste caso, escreveremos ( , ) ( , ) ( , ) = ( , )lim lim limx y a b x a y bf x y f x y→ → → . Intuitivamente, f é contínua no
ponto P se a diferença ( , ) ( )f x y f P− é pequena quando a distância ( , )x y P− for pequena.
Observacão 3.1. Seja 2:f X ⊆ →R R uma função, com X um conjunto aberto. Diremos que f é contínua em X se f é contínua em todos os pontos de X .
Se pelo menos uma das condições da definição de função contínua f em P não for satisfeita, diremos que f é descontínua no ponto P . Neste caso, diremos que o ponto P é uma descontinuidade removível de f se ( , ) ( , ) ( , )lim x y a b f x y→ existir, mas
( , ) ( , )( , ) ( ).lim
x y a bf x y f P
→≠
Caso contrário, ou seja, se ( , ) ( , ) ( , )lim x y a b f x y→ não existir, diremos que o ponto P é uma descontinuidade essencial de f .
É de fundamental importância lembrar que: como a definição de continuidade de uma função real de várias variáveis reais é um extensão da definição de continuidade de uma função real de uma variável real, ela tem propriedades análogas.
Exemplo 3.7 Seja 2:f →R R a função definida por
2
2 2
3 , se ( , ) (0,0)( , ) =
0, se ( , ) = (0,0).
x y x yf x y x y
x y
⎧≠⎪
+⎨⎪⎩
Verifique se f é contínua no ponto = (0,0)P .
12
Solução. Para resolver esse problema devemos verificar cada uma das condições da definição de continuidade de f em um ponto P . Como o domínio de f é todo 2R temos que (0,0)f existe e
(0,0) = 0f . Pelo Exemplo 3.6, ( , ) (0,0) ( , )lim x y f x y→ existe e ( , ) (0,0) ( , ) = 0lim x y f x y→ . Finalmente, como
( , ) (0,0)( , ) = 0 = (0,0)lim
x yf x y f
→ temos que f é contínua no ponto = (0,0)P . Note que f é contínua em
todo 2R .
Exemplo 3.8 Seja 2:f →R R a função definida por
2 2 , se ( , ) (0,0)( , ) =
0, se ( , ) = (0,0).
xy x yx yf x y
x y
⎧ ≠⎪ +⎨⎪⎩
Verifique se f é contínua no ponto = (0,0)P . Solução. Como o domínio de f é todo 2R temos que (0,0)f existe e (0,0) = 0f . Ao longo da reta
=y mx , com 0x ≠ , obtemos 2
2 2 2 2 2 2( , ) (0,0) 0 0
= = = .lim lim lim(1 ) 1 1x y x x
xy x m m mx y x m m m→ → →+ + + +
Assim, ( , ) (0,0) ( , )lim x y f x y→ não existe. Portanto, f não é contínua no ponto = (0,0)P . Note que f é
contínua em 2 {(0,0)}−R .
Exemplo 3.9 Seja 2:f →R R a função definida por
2 2, se ( , ) (0,0)
( , ) =1, se ( , ) = (0,0).
xy x yf x y x y
x y
⎧ ≠⎪+⎨
⎪⎩
Verifique se f é contínua no ponto = (0,0)P . Solução. Como o domínio de f é todo 2R temos que (0,0)f existe e (0,0) = 1f . Sejam
2 2( , ) = e ( , ) = .yf x y x g x y
x y+
Então ( , ) (0,0) ( , ) = 0lim x y f x y→ e ( , )g x y é limitada, pois ( , ) < 1g x y . Portanto,
2 2( , ) (0,0) ( , ) (0,0)= ( , ) ( , ) = 0.lim lim
x y x y
xy f x y g x yx y→ →+
Assim, ( , ) (0,0) ( , )lim x y f x y→ existe e ( , ) (0,0) ( , ) = 0lim x y f x y→ . Finalmente, como
( , ) (0,0)( , ) = 0 1 = (0,0)lim
x yf x y f
→≠
temos que f não é contínua no ponto = (0,0)P . Note que = (0,0)P é uma descontinuidade removível de f , pois a função 2:g →R R definida por
( , ), se ( , ) (0,0)( , ) =
0, se ( , ) = (0,0)f x y x y
g x yx y
≠⎧⎨⎩
é contínua em = (0,0)P .

13
4. Avaliando o que foi construído Nesta unidade você começou o primeiro contato com as funções reais de várias variáveis reais, foi apresentado às curvas de nível, aprendeu, através de algumas técnicas especiais, se uma função tem ou não limite e é contínua. Foi realmente grande o volume de conhecimentos apresentados. Porém, fique certo, ainda há muito que aprender dentro desses mesmos tópicos. Você viu, por exemplo, que a definição formal de limite é a mesma de uma função real de uma variável real, mas a existência dos limites por alguns caminhos não garante que o limite existe.
No Moodle
Pois é. Você precisa visitar o espaço reservado à disciplina Cálculo Diferencial e integral III na plataforma MOODLE, onde terá a oportunidade de revisar, testar e enriquecer seus conhecimentos. Lembre-se de que somos parceiros nos estudos e, portanto, eu não pretendo seguir adiante sem que você me acompanhe. Aguardo você no MOODLE!

14
Unidade II Diferenciabilidade 1. Situando a Temática
Nesta unidade vamos nos dedicar ao estudo das derivadas parciais de uma função real de várias variáveis reais, isto é, quando fixamos todas as variáveis independentes, exceto uma, e derivamos em relação a essa variável, obtemos uma derivada “parcial” semelhante àquela do curso de Cálculo Diferencial e Integral I.
Finalizamos com uma estimativa da variação do valor de uma função quando nos movemos uma pequena distância a partir de um ponto fixo na direção de um vetor unitário. 2. Problematizando a Temática
Suponhamos que você esteja com uma situação prática (por exemplo, um mapa cartográfico) na qual resultou a função 2:f →R R definida por
2 2
1 , se ( , ) (0,0)( , ) =
0, se ( , ) = (0,0).
x yx yf x y
x y
⎧ ≠⎪ +⎨⎪⎩
Determine as direções nas quais f cresce (decresce) mais rapidamente no ponto = (1,2)P , e quais são as taxas de variação nessas direções? Este e outros tipos de problemas que ocorrem em nosso dia-a-dia vamos modelar e resolver nesta unidade. 3. Conhecendo a Temática 3.1 Conceito de derivada parcial
Sejam 2:f X ⊆ →R R uma função e = ( , )P a b X∈ fixado, com X um conjunto aberto. Se fixarmos uma variável, digamos =y b , obtemos uma função real = ( ) = ( , )z g x f x b de uma única variável real. Portanto, sua derivada é dada por
0 0
( ) ( ) ( , ) ( , )'( ) = =lim limh h
g a h g a f a h b f a bg ah h→ →
+ − + −
quando esse limite existe, a qual é chamada de derivada parcial de f em relação a x no ponto = ( , )P a b e denotaremos por
1( , ), ( , ) ( , ), ( , ) ( , ).x xf za b f a b a b D f a b ou f a bx x∂ ∂∂ ∂
A Figura 05 expõe graficamente a definição de derivada parcial de f em relação a x no ponto = ( , )P a b .
Exemplo 1.1 Seja 2:f →R R a função definida por 2 2( , ) = 3 5 4f x y x xy y+ − . Determine ( , )xf x y e ( , )yf x y no ponto = (1,3)P .

15
Solução. Para obtermos ( , )xf x y , tratamos a variável y momentaneamente como uma constante e derivamos em relação à variável x usando as técnicas de derivação para funções reais de uma variável real. Assim,
( , ) = 6 5 .xf x y x y+ Em seguida avaliamos a derivada no ponto desejado, ou seja,
(1,3) = 6 1 5 3 = 21.xf ⋅ ⋅+ De modo análogo, obtemos ( , ) = 5 8yf x y x y− e (1,3) = 19yf − .
Exemplo 1.2 Seja 2:f →R R a função definida por 2 3( , ) = 3 5 sen( )f x y x xy xy− − . 1. Determine (1,0)xf . 2. Determine a inclinação da reta tangente à curva de interseção da superfície
2 3= 3 5 sen( )z x xy xy− − com o plano = 0y no ponto = (1,0,3)P . Solução. (1) Pelo Exemplo 1.1, obtemos
3( , ) = 6 5 cos( ) e (1,0) = 6 1 5 0 0cos(0) = 6.x xf x y x y y xy f ⋅ ⋅− − − −
( 2 ) Pelo item (1) a inclinação da reta tangente é igual a = (1,0) = 6xm f .
De modo análogo, definiremos a derivada parcial de f em relação a y no ponto = ( , )P a b . Note que as derivadas parciais de segunda, terceira ordem, etc., são definidas de modo similar ao caso de uma função real de uma variável real.
É de grande importância “econômica” observar que se a função 2:f X ⊆ →R R satisfaz a
seguinte propriedade: ( , ) = ( , )f x y f y x , para todo ( , )x y X∈ e ( , ) = ( , )f x y f y x− , para todo ( , )x y X∈ . Se este é o caso, basta calcular uma derivada parcial, por exemplo, ( , )xf x y e fazer
( , ) = ( , )y xf x y f y x se ( , ) = ( , )f x y f y x ou ( , ) = ( , )y xf x y f y x− se ( , ) = ( , )f x y f y x− . Exemplo 1.3 Seja 2:f →R R a função definida por 3 3( , ) = cos( )f x y x y xy+ . Determine xxf ,
xyf , yxf e yyf .
Solução. Observe que ( , ) = ( , )f x y f y x . Assim, basta determinar ( , )xf x y e fazer ( , ) = ( , )y xf x y f y x . Como
2 3( , ) = 3 sen( )xf x y x y y xy− temos que
3 2( , ) = ( , ) = 3 sen( )y xf x y f y x x y x xy− . Assim,
23 2
2 = 6 cos( )xxf f f xy y xy
x x x∂ ∂ ∂⎛ ⎞ = = −⎜ ⎟∂ ∂ ∂⎝ ⎠
e 2
2 2= 9 sen( ) cos( )xyf f f x y xy xy xy
y x y x∂ ∂ ∂⎛ ⎞ = = − −⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠
.
De modo análogo, obtemos
2 2 3 2= 9 sen( ) cos( ) e = 6 cos( ).yx yyf x y xy xy xy f x y x xy− − −

16
Note que =xy yxf f , mas isto nem sempre é verdade.
Exemplo 1.4 Seja 2:f →R R a função definida por
2 2 , se ( , ) (0,0)( , ) =
0, se ( , ) = (0,0).
xy x yx yf x y
x y
⎧ ≠⎪ +⎨⎪⎩
Determine (0,0)xf e (0,0)yf .
Solução. Observe que ( , ) = ( , )f x y f y x . Assim,
0 0
( ,0)(0,0) = = (0) = 0.lim lim0xx t
f xf→ →
e (0,0) = 0yf . Portanto, as derivadas parciais de f no ponto = (0,0)P existem. No entanto, pelo
Exemplo 3.8 da unidade I, que f não é contínua no ponto = (0,0)P , ou seja, o fato de as derivadas parciais existirem não implicam na continuidade de f .
Exemplo 1.5 Seja 2:f →R R a função definida por 2 2
2 2
( ) , se ( , ) (0,0)( , ) =
0, se ( , ) = (0,0).
xy x y x yf x y x y
x y
⎧ −≠⎪
+⎨⎪⎩
1. Determine xf e yf .
2. Calcule (0,0)xyf e (0,0)yxf .
Solução. (1) Observe que ( , ) = ( , )f x y f y x− . Como a função é definida por duas sentenças vamos dividir a prova em dois passos: 1.o Passo. Se ( , ) (0,0)x y ≠ , então
2 2 2 2
2 2 2 2 2
4( , )) = .( )x
x y x yf x y yx y x y
⎛ ⎞−+⎜ ⎟+ +⎝ ⎠
2.o Passo. Se ( , ) = (0,0)x y , então devemos usar a definição da derivada parcial para calcular (0,0)xf .
0 0
( ,0) (0,0) 0(0,0) = = = 0.lim limxx x
f x ffx x→ →
−
Portanto, 2 2 2 2
2 2 2 2 2
4 , se ( , ) (0,0)( , ) = ( )
0, se ( , ) = (0,0)x
x y x yy x yf x y x y x y
x y
⎧ ⎛ ⎞−+ ≠⎪ ⎜ ⎟+ +⎨ ⎝ ⎠
⎪⎩
e 2 2 2 2
2 2 2 2 2
4 , se ( , ) (0,0)( , ) = ( , ) = ( )
0, se ( , ) = (0,0).y x
y x x yx x yf x y f y x x y x y
x y
⎧ ⎛ ⎞−− + ≠⎪ ⎜ ⎟− + +⎨ ⎝ ⎠⎪⎩
( 2 ) Para calcalar (0,0)xyf e (0,0)yxf , devemos usar a definição da derivada parcial segunda.
3
30 0
(0, ) (0,0)(0,0) = = = 1lim limx xxy
y y
f y f yfy y→ →
−− −
e

17
3
30 0
( ,0) (0,0)(0,0) = = = 1.lim limy y
yxx x
f x f xfx x→ →
−
Note que (0,0) (0,0)xy yxf f≠ .
Agora, apresentaremos um resultado muito importante no estudo de derivadas parciais, o qual é provado em um curso mais avançado: Sejam 2:f X ⊆ →R R uma função contínua e = ( , )P a b X∈ fixado. Se xf , yf e xyf são contínuas em uma vizinhança δ de P , então ( , ) = ( , )xy yxf a b f a b .
Exemplo 1.6 Seja 2:f →R R a função definida por
2 2
2 2
1( )sen , se ( , ) (0,0)( , ) =
0, se ( , ) = (0,0).
x y x yf x y x y
x y
⎧ ⎛ ⎞⎪ ⎜ ⎟+ ≠⎪ ⎜ ⎟⎨ +⎝ ⎠⎪⎪⎩
1. Determine xf e yf .
2. Verifique se xf e yf são contínuas em = (0,0)P .
Solução. (1) Observe que ( , ) = ( , )f x y f y x . Como a função é definida por duas sentenças vamos dividir a prova em dois passos: 1.o Passo. Se ( , ) (0,0)x y ≠ , então por derivação direta, obtemos
2 2 2 2 2 2
1 1( , )) = 2 sen cos .xxf x y x
x y x y x y
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟−⎜ ⎟ ⎜ ⎟+ + +⎝ ⎠ ⎝ ⎠
2.o Passo. Se ( , ) = (0,0)x y , então devemos usar a definição da derivada parcial para calcular (0,0)xf .
2
0 0 0
( ,0) (0,0) 1 1(0,0) = = sen = sen = 0,lim lim limxx x x
f x f xf xx x x x→ → →
⎛ ⎞ ⎛ ⎞−⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
pois 1senx
⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠
é limitada. Portanto,
2 2 2 2 2 2
1 12 sen cos , se ( , ) (0,0)( , ) =
0, se ( , ) = (0,0)x
xx x yf x y x y x y x y
x y
⎧ ⎛ ⎞ ⎛ ⎞⎪ ⎜ ⎟ ⎜ ⎟− ≠⎪ ⎜ ⎟ ⎜ ⎟⎨ + + +⎝ ⎠ ⎝ ⎠⎪⎪⎩
e
2 2 2 2 2 2
1 12 sen cos , se ( , ) (0,0)( , ) = ( , ) =
0, se ( , ) = (0,0).y x
yy x yf x y f y x x y x y x y
x y
⎧ ⎛ ⎞ ⎛ ⎞⎪ ⎜ ⎟ ⎜ ⎟− ≠⎪ ⎜ ⎟ ⎜ ⎟⎨ + + +⎝ ⎠ ⎝ ⎠⎪⎪⎩
( 2 ) Para saber se xf é contínua em = (0,0)P devemos verificar cada uma das condições da definição de
continuidade de xf em um ponto P . Como o domínio de xf é todo 2R temos que (0,0)xf existe e
(0,0) = 0xf . Ao longo da sequência 1=x
nπ e = 0y , com n∈N , obtemos
2 2 2 2 2 2( , ) (0,0)
1 12 sen cos = cos( ) = ( 1) .lim lim n
x y n
xx nx y x y x y
π→ →∞
⎛ ⎞⎛ ⎞ ⎛ ⎞⎜ ⎟⎜ ⎟ ⎜ ⎟− − − −
⎜ ⎟ ⎜ ⎟⎜ ⎟+ + +⎝ ⎠ ⎝ ⎠⎝ ⎠

18
Assim, ( , ) (0,0) ( , )lim x y xf x y→ não existe, pois depende do número n ser par ou ímpar. Portanto, xf não é contínua no ponto = (0,0)P . De modo análogo, prova-se que yf não é contínua no ponto = (0,0)P . Note
que xf e yf são contínuas em 2 {(0,0)}−R .
3.2 Diferenciabilidade
Já vimos no curso Cálculo Diferencial e Integral I que uma função real de uma variável real f é diferenciável em um ponto a se existir uma reta passando pelo ponto ( , ( ))P a f a= , cuja equação cartesiana é ( ) = ( ) ( )x f a m x aϕ + − , tal que
( ) ( ) = 0.limx a
f x xx a→
−ϕ−
Note que ( ) ( ) ( ) ( ) ( ) ( ) ( )= 0 = 0 = ( ) = .lim lim lim '
x a x a x a
f x x f x f a m x a f x f a m f a mx a x a x a→ → →
−ϕ − − − −⇔ ⇔ ⇔
− − −
Portanto, na reta diferenciabilidade é equivalente a ser derivável. Esse conceito de diferenciabilidade pode ser estendido de modo análogo a uma função real de duas ou mais variáveis reais.
Sejam 2:f X ⊆ →R R uma função e = ( , )P a b X∈ fixado, com X um conjunto aberto. Diremos que f é diferenciável no ponto P se existir um plano passando por P , cuja equação cartesiana é
( , ) = ( , ) ( ) ( )x y f a b A x a B y bϕ + − + − , tal que
( , ) ( , )
( , ) ( , ) = 0,limx y a b
f x y x yQ P→
−ϕ−
com = ( , )Q x y X∈ . Um modo alternativo de definirmos diferenciabilidade de f em um ponto P é o seguinte: diremos
que f é diferenciável no ponto P se existirem funções 21 2, :T T X ⊆ →R R contínuas em P tais que
1 2( , ) ( , ) ( , )( ) ( , )( )f x y f a b T x y x a T x y y b− = − + − ,
para todo = ( , )Q x y X∈ . Isto significa que o acréscimo ( , ) ( , )z f x y f a bΔ = − de f é uma combinação linear dos acréscimos x x aΔ = − e y y bΔ = − das variáveis x e y, com coeficientes quase lineares em uma
vizinhança de P. Observe que, como 1T e 2T são contínuas em P, temos que, dado > 02ε
, existe em
correspondência um > 0δ tal que
1 1 2 2( , ) ( ) ( ) ( ) < ( ) ( ) <2 2
Q x y V P T Q T P e T Q T Pδε ε
= ∈ ⇒ − − .
Logo,
1 1 2 2( ) ( ) ( ) ( ) ( ) ( )f Q f P T Q T P x a T Q T P y b Q Pε− ≤ − − + − − < − . Assim,
( ) ( )f Q f PQ P
ε−
<−
.
Portanto, concluímos que as duas definições são equivalentes. Isto significa geometricamente que: f é diferenciável no ponto = ( , )P a b , quando uma pequena porção da superfície ( , )z f x y= , em volta do ponto ( , , ( , ))a b f a b , é quase plana.
Finalmente, note que se fizermos as substituições =h x a− e =k y b− , então obtemos

19
2 2
2 2 2 2
( , ) ( , ) ( , )= e = ,E h k f a h b k a h b kQ P h kh k h k
+ + −ϕ + +− +
+ +
com ( , ) = ( , ) ( , )E h k f a h b k a h b k+ + −ϕ + +
chamado o erro ou o resto. Para a maioria das funções encontradas nas aplicações práticas do cálculo, esta aproximação linear oferece uma boa precisão, isto é, ( , )E h k é muito pequeno quando h e k são
suficientemente pequenos de modo que o ponto = ( , )Q a h b k+ + esteja dentro de X . Diremos f é diferenciável em X se é diferenciável em todos os pontos de X .
Exemplo 2.1 Seja 2:f →R R a função definida por 2 3( , ) = 2f x y x y+ . Mostre que f é
diferenciável em (3,2)P = . Solução. Como
2 3 2 31 2( , ) (3, 2) 2 26 2( 9) ( 8) ( , )( 3) ( , )( 2)f x y f x y x y T x y x T x y y− = + − = − + − = − + − ,
com 2
1 2( , ) 2( 3) e ( , ) 2 4T x y x T x y y y= + = + + , temos que f é diferenciável em P, pois 1T e 2T são funções contínuas em P .
Teorema 2.1 Sejam 2:f X ⊆ →R R uma função e = ( , )P a b X∈ fixado, com X um conjunto
aberto. Se f é diferenciável no ponto P , então f é contínua no ponto P .
Prova. Suponhamos que f seja diferenciável no ponto P . Então, por definição, existem constantes reais A e B tais que
( , ) ( , )
( , ) ( , ) ( ) ( ) = 0.limx y a b
f x y f a b A x a B y bQ P→
− − − − −−
Fazendo =h x a− e =k y b− , obtemos
2 2 2 2( , ) (0,0) ( , ) (0,0)
( , ) ( , ) ( , )= = 0.lim limh k h k
E h k f a h b k f a b Ah Bkh k h k→ →
+ + − − −
+ +
Logo, ( ) ( )
( , ) (0,0) ( , ) (0,0)( , ) ( , ) = ( , ) = 0,lim lim
h k h kf a h b k f a b Ah Bk E h k
→ →+ + − + +
pois
2 2
2 2( , ) (0,0) ( , ) (0,0)
( , )( , ) = = 0,lim limh k h k
E h kE h k h kh k→ →
⎛ ⎞+⎜ ⎟
+⎝ ⎠
ou, equivalentemente,
( , ) (0,0)( , ) = ( , ).lim
h kf a h b k f a b
→+ +
Portanto,
( , ) ( , )( , ) = ( , ),lim
x y a bf x y f a b
→
isto é, f é contínua no ponto P . ■
Teorema 2.2 Sejam 2:f X ⊆ →R R uma função e = ( , )P a b X∈ fixado, com X um conjunto aberto. Se f é diferenciável no ponto P , então ( , )xf a b e ( , )yf a b existem. Neste caso, a equação cartesiana do plano tangente ao gráfico de f passando por P é dada por
= ( , ) ( , )( ) ( , )( ).x yz f a b f a b x a f a b y b+ − + −

20
Prova. Suponhamos que f seja diferenciável no ponto P e = ( , ) ( ) ( )z f a b A x a B y b+ − + − a equação do plano tangente. Então, por definição, o limite
2 2( , ) (0,0)
( , ) ( , ) = 0limh k
f a h b k f a b Ah Bkh k→
+ + − − −
+
não depende do caminho. Assim, ao longo do caminho que liga os pontos ( , )a b e ( , )a h b+ , obtemos
0 0
( , ) ( , ) ( , ) ( , )= 0 = .lim limh h
f a h b f a b Ah f a h b f a b Ah h→ →
+ − − + −⇒
Portanto, ( , )xf a b existe e ( , ) =xf a b A . De modo análogo, prova-se ( , )xf a b existe e ( , ) =yf a b B . ■
Observação 2.1 Sejam 2:f X ⊆ →R R uma função e = ( , )P a b X∈ fixado, com X um
conjunto aberto.
1. Se f não é contínua no ponto P , então f não é diferenciável no ponto P (Teorema 2.1). 2. Se uma das derivadas parciais de f não existir no ponto P , então f não é diferenciável no ponto
P (Teorema 2.2). 3. Para provar que f é diferenciável no ponto P , é suficiente provar que f possui derivadas
parciais no ponto P e que
2 2( , ) (0,0) ( , ) (0,0)
( , ) = 0 ou ( , ) = 0 .lim limh k h k
E h k E h kh k→ →
⎛ ⎞⎜ ⎟⎝ ⎠+
Exemplo 2.2 Seja 2:f →R R a função definida por 2 2( , ) =f x y x y+ . Mostre que f é
diferenciável em todo 2R . Solução. Dado 2= ( , )P a b ∈R , obtemos ( , ) = 2xf x y x e ( , ) = 2yf x y y , isto é, as derivadas parciais
existem em todo 2R . Como ( , ) = 2xf a b a , ( , ) = 2yf a b b e 2 2
2 2
2 2 2 2
( , ) ( ) ( ) ( , ) 2 2= =E h k a h b k f a b ah bk h kh k h k
+ + + − − −+
+ +
temos que
2 2( , ) (0,0)
( , ) = 0.limh k
E h kh k→ +
Portanto, f é diferenciável em todo 2R .
Exemplo 2.3 Seja 2:f →R R a função definida por 2
4 2 , se ( , ) (0,0)( , ) =
0, se ( , ) = (0,0).
x y x yf x y x y
x y
⎧≠⎪
+⎨⎪⎩
Verifique se f é diferenciável no ponto = (0,0)P . Solução. Vamos primeiro verificar a continuidade de f no ponto = (0,0)P . Como o domínio de f é todo
2R , temos que (0,0)f existe e (0,0) = 0f . Ao longo do caminho 2=y mx , com 0x ≠ , obtemos
2 4
4 2 4 2 2 2( , ) (0,0) 0 0= = = .lim lim lim(1 ) 1 1x y x x
x y x m m mx y x m m m→ → →+ + + +

21
Assim, ( , ) (0,0) ( , )lim x y f x y→ não existe. Portanto, f não é contínua no ponto = (0,0)P . Consequentemente, f não é diferenciável no ponto = (0,0)P . Note que f é diferenciável em
2 {(0,0)}−R .
Exemplo 2.4 Seja 2:f →R R a função definida por 3( , ) =f x y xy . 1. Calcule (0,0)xf e (0,0)yf .
2. Verifique se f é diferenciável no ponto = (0,0)P . Solução. (1) Para calcular (0,0)xf e (0,0)yf , devemos usar a definição de derivada parcial.
0 0
( ,0) (0,0) (0, ) (0,0)(0,0) = = 0 e (0,0) = = 0.lim lim 0x yx y
f x f f y ff fx→ →
− −
( 2 ) Como (0,0)xf e (0,0)yf existem, basta verificar se
2 2( , ) (0,0)
( , ) = 0.limh k
E h kh k→ +
Como 3
2 2 2 2
( , ) =E h k hkh k h k+ +
temos, ao longo do caminho 2=k mh , com 0h ≠ , que
3 3 33
2 2 2 2 4 2 2( , ) (0,0) 0 0
( , ) = = = 0.lim lim lim1h k h h
E h k h m m mh k h m h m h→ → →
± ≠+ + +
Portanto, f não é diferenciável no ponto = (0,0)P .
Sejam 2:f X ⊆ →R R uma função diferenciável no ponto = ( , )P a b X∈ , com X um conjunto aberto. A expressão
( ) = ( , ) ( , )x ydf P f a b dx f a b dy+
é chamada a diferencial de f no ponto P .
Exemplo 2.5 Calcule o valor aproximado de tan[2,01 log(0,99)]⋅ .
Solução. Para resolver esse problema devemos determinar ( , )f a h b k+ + , quando ( , ) = tan( log )f x y x y , = 2,01a h+ e = 0,99b k+ . Consegue-se isto escolhendo = 2a , = 0,01h , = 1b e = 0,01k − . Como h e k são pequenos temos que
( , ) ( , ) ,f a h b k f a b df+ + ≈ +
com =dx h e =dy k . Assim, basta calcular (2,1)f , (2,1)xf e (2,1)yf . Por derivação direta, obtemos
2 2( , ) = ( log ) log ( , ) = ( log ) .sec secx yxf x y x y y e f x y x yy
Logo, (2,1) = 0f , (2,1) = 0xf e (2,1) = 0,5yf . Portanto, tan[2,01 log(0,99)] 0.005⋅ ≈ −
Observação 2.2 Sejam 2:f X ⊆ →R R uma função e = ( , )P a b X∈ fixado, com X um
conjunto aberto. Como = ( , ) ( , )z f a h b k f a bΔ + + − e = ( , ) ( , )x ydf f a b dx f a b dy+ , com = =dx x hΔ

22
e = =dy y kΔ , temos que ( , ) ( , ) ( , ) =E h k f a h b k a h b k z df= + + −ϕ + + Δ − . Logo,
2 2 2 2
( , ) =E h k z dfh k h k
Δ −
+ +.
Portanto, f é diferenciável em P se = ( , )z df E h kΔ + . Nesse caso, a função 2:T →R R definida por
( , ) ( , ) ( , )x yT h k f a b h f a b k= + é linear. Portanto, quando nos movemos do ponto = ( , )P a b para um
ponto próximo, obtemos as seguintes variações:
Real Estimada Erro
Variação absoluta: zΔ df z dfΔ −
Variação relativa: ( )z
f PΔ
( )df
f P
( )z dff P
Δ −
Variação
percentual: 100
( )z
f PΔ
× 100( )df
f P× 100
( )z dff P
Δ −×
Teorema 2.3 (Lema Fundamental) Sejam 2:f X ⊆ →R R uma função e = ( , )P a b X∈ fixado, com X um conjunto aberto. Se f tem derivadas parciais contínuas no ponto P , então f é diferenciável no ponto P .
Exemplo 2.6 Seja 2:f →R R a função definida por
2 2
2 2 , se ( , ) (0,0)( , ) =
0, se ( , ) = (0,0).
x y x yf x y x y
x y
⎧≠⎪
+⎨⎪⎩
Verifique se f é diferenciável no ponto = (0,0)P . Solução. Pelo Teorema 2.3 basta verificar se as derivadas parciais ( , )xf x y e ( , )yf x y são contínuas no
ponto = (0,0)P . Observe que ( , ) = ( , )f x y f y x . Como a função é definida por duas sentenças vamos dividir a prova em dois passos: 1.o Passo. Se ( , ) (0,0)x y ≠ , então
( )4
22 2
2( , )) = .xxyf x y
x y+
2.o Passo. Se ( , ) = (0,0)x y , então devemos usar a definição da derivada parcial para calcular (0,0)xf .
0 0
( ,0) (0,0) 0(0,0) = = = 0.lim limxx x
f x ffx x→ →
−
Portanto,
( )4
22 2
2 , se ( , ) (0,0)( , ) =
0, se ( , ) = (0,0)x
xy x yf x y x y
x y
⎧≠⎪
+⎨⎪⎩
e

23
( )4
22 2
2 , se ( , ) (0,0)( , ) = ( , ) =
0, se ( , ) = (0,0).y x
x y x yf x y f y x x y
x y
⎧≠⎪
+⎨⎪⎩
Agora, é fácil verificar que ( , )xf x y e ( , )yf x y são contínuas no ponto = (0,0)P . 3.3 Regra da cadeia
Nesta seção apresentaremos algumas versões da regra da cadeia aplicadas às derivadas parciais. Sejam :f I ⊆ →R R e :g J ⊆ →R R duas funções com ( )f I J⊆ tais que = ( )y f u e
= ( )u g x , então a função composta é dada por = ( ) = ( ( ))y g f x g f xo . Assim, se f e g são deriváveis, então
= .dy dy dudx du dx
Agora, sejam 2:f X ⊆ →R R uma função, com X um conjunto aberto, = ( )x g t e = ( )y h t . Se
= ( , )z f x y é diferenciável, g e h deriváveis, então
( )= ou ( ) = ( ) ( ) .u vdz z dx z dy z t f x t f y tdt u dt y dt
∂ ∂ ′ ′ ′+ +∂ ∂
Note que esse resultado é obtido “dividindo” a diferencial de f por dt . Além disso, um dipositivo prático para memorizar a Regra da Cadeia é dado no diagrama em árvore, conforme a Figura 06. Alternativamente, na forma matricial
dx x xdz z z z z z zdt u ve
dy y ydt x y u v x ydt u v
∂ ∂⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎡ ⎤ ⎡ ⎤∂ ∂ ∂ ∂ ∂ ∂⎡ ⎤ ⎡ ⎤ ∂ ∂= =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥∂ ∂⎣ ⎦ ⎣ ⎦
.
Exemplo 3.1 Seja 2:f →R R a função definida por 2 2= ( , ) =z f x y x y− . Se 1=
1x
t+ e
=1
tyt+
, para todo { 1}t∈ − −R , então determine dzdt
.
Solução. Pela regra da cadeia basta determinar xf , yf , ( )x t′ e ( )y t′ . Como
2 2
1 1= 2 , = 2 , ( ) = e ( ) =(1 ) (1 )x yf x f y x t y t
t t′ ′− −
+ +
temos que

24
( )22 2
2 1 2 1 2= = .1 (1 ) 1 (1 ) 1
dz tdt t t t t t
⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞− + − −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟+ + + +⎝ ⎠ ⎝ ⎠ +⎝ ⎠ ⎝ ⎠
Mais geralmente, sejam 2:f X ⊆ →R R e 2, :g h Y ⊆ →R R funções, com X e Y conjuntos
abertos, = ( , )x g u v e = ( , )y h u v . Se = ( , )z f x y , = ( , )x g u v e = ( , )y h u v são diferenciáveis, então
= e = .z z x z y z z x z yu x u y u v x v y v∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
+ +∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
Exemplo 3.2 Seja 2:f →R R a função definida por 2 3( , ) =f u v u v+ . Se
= ( , ) = ( ( , ), ( , )), = 3 e = 2 ,z g x y f u x y v x y u x y v x y− +
determine zx∂∂
e zy∂∂
.
Solução. Como
2= 2 , = 3, = 1, = 3 , = 1 e = 2z u u z v vu vu x y v x y∂ ∂ ∂ ∂ ∂ ∂
−∂ ∂ ∂ ∂ ∂ ∂
temos que 2 2 2 2 2 2= 6 3 = 3 12 18 12 6 e = 6 = 6 24 3 24 .z zu v x xy x y y u v x xy x y y
x y∂ ∂
+ + + + − − + + − + +∂ ∂
3.4 Derivada direcional e gradiente
Nesta seção vamos estender a noção de derivadas parciais a outras direções que não sejam retas paralelas ao eixos.
Sejam 2:f X ⊆ →R R uma função, com X um conjunto aberto, = ( , )P x y X∈ , e 2= (cos ,sen ) = cos senu i jθ θ θ θ+ ∈R , um vetor unitário, para todo θ ∈R . A derivada direcional de
f no ponto P , na direção do vetor u , é definida como
0 0
( ) ( ) ( cos , sen ) ( , )=lim limt t
f P tu f P f x t y t f x yt t
θ θ→ →
+ − + + −
quando esse limite existe e denotaremos por
( , ), ou .u uf x y f D fu∂
∇∂
Note que θ é o ângulo entre o vetor u e o eixo dos x .
Observação 4.1 Note que quando = (1,0) =u i , obtemos
0
( , ) ( , )( , ) = = ( , )limt
f f x t y f x y fx y x yu t x→
∂ + − ∂∂ ∂
que é a derivada parcial de f em relação a x . De modo análogo, quando = (0,1) =u j , obtemos a derivada parcial de f em relação a y .
Exemplo 4.1 Seja 2:f →R R a função definida por ( , ) = exyf x y y . Determine a derivada direcional de f no ponto = (0,0)P na direção do vetor = (4,3) = 4 3v i j+ .

25
Solução. Para resolver esse problema devemos primeiro verificar se o vetor v é unitário. Como 2 2= 4 3 = 5v + temos que ele não é um vetor unitário. Assim, devemos obter a normalização do vetor v ,
isto é, 1 4 3= =
5 5u v i j
v+
é um vetor unitário com a mesma direção e sentido do vetor v . Portanto,
21225
0 0
4 3 3, e 35 5 5(0,0) = = =lim lim 5
t
t t
f t t tfu t t→ →
⎛ ⎞⎜ ⎟∂ ⎝ ⎠
∂.
Exemplo 4.2 Seja 2:f →R R a função definida por
3
6 2 , se ( , ) (0,0)( , ) =
0, se ( , ) = (0,0).
x y x yf x y x y
x y
⎧≠⎪
+⎨⎪⎩
Determine a derivada direcional de f ponto = (0,0)P na direção de qualquer vetor unitário u . Solução. Seja 2= (cos ,sen )u θ θ ∈R um vetor unitário qualquer. Então
4 2
7 3 260 0
( cos , sen ) sencos(0,0) = = = 0.lim lim sencost t
f f t t tu t t t
θ θ θ θθ θ→ →
∂∂ +
Portanto, todas as derivadas direcionais de f no ponto = (0,0)P existem. No entanto, f não é contínua no ponto = (0,0)P , pois ao longo do caminho 3=y mx , com 0x ≠ , obtemos
3 6
6 2 6 2 2 2( , ) (0,0) 0 0= = = .lim lim lim(1 ) 1 1x y x x
x y x m m mx y x m m m→ → →+ + + +
Exemplo 4.3 Seja 2:f →R R a função definida por
2 2 , se ( , ) (0,0)( , ) =
0, se ( , ) = (0,0).
xy x yx yf x y
x y
⎧ ≠⎪ +⎨⎪⎩
Determine a derivada direcional de f ponto = (0,0)P na direção de qualquer vetor unitário u que não seja paralelo ao eixos. Solução. Seja 2= (cos ,sen )u θ θ ∈R um vetor unitário, com cos 0θ ≠ e sen 0θ ≠ . Então
2
2
0 0 0
cos sen( cos , sen ) cos sen(0,0) = = =lim lim lim
t t t
tf f t t tu t t t
θ θθ θ θ θ
→ → →
∂∂
não existe. Portanto, a derivada direcional de f no ponto = (0,0)P na direção do vetor u não existe. No entanto, as derivadas parciais de f no ponto = (0,0)P existem.
Teorema 4.1 Sejam 2:f X ⊆ →R R uma função e = ( , )P a b X∈ fixado, com X um conjunto aberto. Se f é diferenciável no ponto P , então f possui derivada direcional no ponto P na direção de qualquer vetor unitário 2= (cos ,sen )u θ θ ∈R . Neste caso,
( , ) = ( , ) cos ( , ) senf f fa b a b a bu x y
θ θ∂ ∂ ∂+
∂ ∂ ∂.

26
Prova. Suponhamos que f seja diferenciável no ponto P . Então
0 0( ) = ( cos , sen ) = 0lim lim
t tE tu E t tθ θ
→ →.
Como
( ) = ( ) ( , ) cos ( , ) sen ( )f ff P tu f P a b t a b t t E tux y
θ θ∂ ∂+ + + +
∂ ∂
temos que
0
( ) ( ) = ( , ) cos ( , )sen .limt
f P tu f P f fa b a bt x y
θ θ→
+ − ∂ ∂+
∂ ∂
Portanto, a derivada direcional de f no ponto = ( , )P a b na direção do vetor u existe. ■ Note, pelo Teorema 4.1, que
=f f fi j uu x y
⋅⎛ ⎞∂ ∂ ∂
+⎜ ⎟∂ ∂ ∂⎝ ⎠ (produto escalar).
O gradiente de f , em símbolos f∇ ou ( )grad f , é o vetor
= .f ff i jx y∂ ∂
∇ +∂ ∂
Como u é um vetor unitário temos que
= = cos ,f f u fu
φ⋅∂
∇ ∇∂
com φ o ângulo entre os vetores f∇ e u , ou seja, a derivada direcional é simplesmente a componente do vetor gradiente na direção do vetor u . Portanto, se 2:f X ⊆ →R R é uma função diferenciável no ponto
= ( , )P a b X∈ , então:
1. O máximo de fu∂∂
no ponto P é igual a ( )f P∇ .
2. O mínimo de fu∂∂
no ponto P é igual a ( )f P− ∇ ,
pois 1 cos 1φ− ≤ ≤ . Assim, o máximo (o mínimo) da taxa de variação de ( , )f x y no ponto = ( , )P a b , ocorre quando o vetor u tem a direção e o sentido do vetor ( )f P∇ ( ( )f P−∇ ), isto é,
1= ( )( )
u f Pf P
∇∇
.
Neste caso, o gradiente de f aponta na direção em que a função f cresce (decresce) mais rapidamente. Portanto, concluímos que:
1. O gradiente aponta para uma direção segundo a qual a função f é crescente. 2. Dentre todas as direções ao longo das quais a função f cresce, a direção do gradiente é a de
crescimento mais rápido.
Exemplo 4.4 Seja 3:f →R R a função definida por
2 2 2
1 , se ( , , ) (0,0,0)( , , ) =
0, se ( , , ) = (0,0,0).
x y zx y zf x y z
x y z
⎧ ≠⎪ + +⎨⎪⎩
Determine o valor máximo da derivada direcional de f ponto = (1,2, 3)P − .

27
Solução. Pelo exposto acima, basta determinar a norma do vetor gradiente de f no ponto P . Como
( ) ( ) ( )2 2 22 2 2 2 2 2 2 2 2
2 2 2= , = e =x y zx y zf f f
x y z x y z x y z+ + + + + +
temos que
2 2 2
2 4 6(1,2, 3) = , (1,2, 3) = e (1,2, 3) = .14 14 14x y zf f f− − − −
Portanto, valor máximo da derivada direcional de f no ponto = (1,2, 3)P − é igual a
2 2 22
56( ) = ( ) ( ) ( ) = .14x y zf P f P f P f P∇ + +
Sejam 2:f X ⊆ →R R uma função, com X um conjunto aberto, = ( )x g t e = ( )y h t . Suponhamos que = ( , )z f x y seja diferenciável no ponto = ( , )P x y X∈ , g e h deriváveis. Então, pela Regra da Cadeia, obtemos
( ( )) = = ( ( )) ( )dz z dx z dyP t f P t P tdt x dt y dt
∂ ∂ ′+ ∇ ⋅∂ ∂
,
com '( ) = ( '( ), '( )) = '( ) '( )P t x t y t x t i y t j+ . Agora, consideremos uma curva de nível da função f , isto é,
= {( , ) : ( , ) = }.kC x y X f x y k∈ Logo, dado ( )P t na curva kC ,
( ) = ( ( )) = ( ( ), ( )) = , .F t f P t f x t y t k t∈R Assim,
0 = '( ) = ( ( )) = ( ( )) ( ),dzF t P t f P t P t tdt
⋅ ′∇ ∀ ∈R .
Portanto, se o vetor ( ) 0P t ≠ , para todo t∈R , então o vetor ( ( )) 0f P t∇ ≠ é perpendicular à curva de nível kC , pois a derivada direcional de f no ponto P na direção do vetor unitário
1= ( )( )
u P tP t
′′
é sempre tangente à curva kC . Por essa razão, o plano tangente a uma superfície S , tendo equação cartesiana ( , , ) = 0F x y z , no ponto = ( , , )P a b c S∈ , é o plano que passa no ponto P tendo o gradiente
( )f P∇ como vetor normal, isto é, se = ( , , )Q x y z é um ponto qualquer desse plano, então
( ) = 0 ou ( , , )( ) ( , , )( ) ( , , )( ) = 0x y zPQ f P F a b c x a F a b c y b F a b c z c⋅∇ − + − + −uuur
.
Neste caso, a reta normal à superfície S no ponto = ( , , )P a b c S∈ é a reta paralela ao vetor ( )f P∇ , isto
é, = ( )PQ t f P∇uuur
, com Q um ponto qualquer da reta.
Exemplo 4.5 Determine o plano tangente e a reta normal à superfície S , dada pela equação cartesiana 2 2 23 5 = 0x y z+ + − , no ponto = (1,1,1)P .
Solução. Seja 2 2 2( , , ) = 3 5F x y z x y z+ + − . Então, pelo exposto acima, basta determinar o vetor gradiente de f no ponto P . Como ( ) = 2xF P , ( ) = 2yF P e ( ) = 6zF P temos que
2( 1) 2( 1) 6( 1) = 0 ou 2 2 6 10 = 0.x y z x y z− + − + − + + −
Neste caso, a reta normal à superfície S no ponto = (1,1,1)P S∈ é dada por

28
= 1 2= 1 2= 1 6 , .
x ty tz t t
+⎧⎪ +⎨⎪ + ∈⎩ R
Exemplo 4.6 Sejam 2:f X ⊆ →R R uma função e = ( , )P a b X∈ fixado, com X um conjunto
aberto. Se f é diferenciável no ponto P e S a superfície dada pelo gráfico de f , mostre que o plano tangente a S no ponto = ( , , ( , ))Q a b f a b é dado por
( , ) = ( , )( ) ( , )( )x yz f a b f a b x a f a b y b− − + −
Solução. Seja ( , , ) = ( , )F x y z f x y z− . Então o resultado segue do Exemplo 4.5.
Exemplo 4.7 Determine a reta tangente e a reta normal à curva C , dada pela equação cartesiana 2 2 7 = 0x xy y− + − , no ponto = ( 1,2)P − .
Solução. Seja 2 2( , , ) = 7F x y z x xy y− + − . Então ( ) = 4xF P − e ( ) = 5yF P . Logo,
4( 1) 5( 2) = 0 ou 4 5 14 = 0x y x y− + + − − + −
é a reta tangente à curva C no ponto = ( 1,2)P − . Neste caso, a reta normal à curva C no ponto = ( 1,2)P C− ∈ é dada por
5 4 3 = 0.x y+ − Seja 2:f X ⊆ →R R uma função diferenciável, com X um conjunto aberto. A estimativa da
variação do valor de f quando nos movemos uma pequena distância ds a partir de um ponto = ( , )P a b X∈ na direção do vetor unitário u é dada por
= ( ( ) ) = ( ) ou = ( ) = ( )f df fdf f P u ds P ds f P u Pu ds u∂ ∂
∇ ⋅ ∇ ⋅∂ ∂
.
Note que a derivada direcional faz o mesmo papel da diferencial de uma função real de uma variável real. Exemplo 4.8 Seja 2:f →R R a função definida por ( , ) = e yf x y x . Determine a variação do
valor de f se o ponto = ( , )R x y se move 0,1 unidade do ponto = (2,0)P na direção do ponto = (4,1)Q .
Solução. Vamos primeiro determinar a derivada direcional de f no ponto = (2,0)P na direção do vetor
= = 2v PQ i j+uuur
e a normalização do vetor v é dade por
1 2 1= =5 5
u v i jv
+ .
Como = e y
xf e = e yyf x temos que ( ) = 1xf P e ( ) = 2yf P . Portanto, ( ) = 2f P i j∇ + e
2 1 4( ) = ( 2 ) =5 5 5
( )f P u i j i j∇ ⋅ + ⋅ + .
Finalmente, 4= ( ( ) ) = 0.18 u5
( )(0,1)df f P u ds∇ ⋅ ≈ .

29
5. Avaliando o que foi construído
No Moodle
Não perca tempo. Vá à plataforma MOODLE e dedique-se à resolução das tarefas relacionadas ao assunto desta unidade. Saiba que o aprendizado em Matemática deve ser sequencial, continuado e o sucesso no estudo das funções reais de várias variáveis reais que virão pela frente depende dos conhecimentos de derivadas parciais e gradiente.
Reúna-se com colegas para discutir temas estudados. Procure os Tutores para esclarecer algum tópico que não tenha sido bem assimilado. Comunique-se!

30
Unidade III Aplicações das Derivadas Parciais 1. Situando a Temática
Com os conhecimentos das derivadas parciais estudaremos os problemas práticos de maximizar e minimizar funções que relacionam distância máxima e mínima a um plano, de aplicações em Economia, Administração, etc.
Nesta unidade, encontraremos os valores máximos e mínimos de funções reais de várias variáveis reais e descobriremos onde eles ocorrem. Por exemplo, qual é a maior temperatura de uma placa de metal aquecida e onde ela ocorre? Onde uma dada superfície atinge seu ponto mais alto sobre uma dada região do plano? Como veremos, podemos responder a essas questões usando as derivadas parciais de algumas funções apropriadas. Além disso, veremos ainda um método poderoso para encontrar os valores de máximos e mínimos de funções condicionadas: o Método dos Multiplicadores de Lagrange. 2. Problematizando a Temática
Da mesma forma que as funções reais de uma variável real podem ser utilizadas como eficiente ferramenta de modelagem em diversas situações-problema, principalmente aquelas que possuem como objetivo a minimização ou a maximização de determinado componente variável. Vejamos um exemplo de uma situação dessa natureza.
Mostre que, dentre todos os triângulos de mesmo perímetro, o triângulo equilátero tem a maior área. Suponhamos que os lados do triângulo sejam ,x y e z . Então o perímetro fixo do triângulo é dado por 2 p x y z= + + . Portanto, queremos encontrar o ponto ( , , )P x y z= que maximiza a função “área do triângulo A , dada pela fórmula de Heron
( )( )( )A p p x p y p z= − − − .” Em bem pouco tempo estaremos aptos a efetuar os cálculos necessários à obtenção da resposta a essa
questão.
3. Conhecendo a Temática 3.1 Máximos e mínimos
É pertinente lembrar que as técnicas de máximo e mínimo das funções reais de uma variável real se estendem com alguns cuidados para funções reais de várias variáveis reais. Além disso, que todos os resultados desta seção continuam válidos para todas as funções reais de várias variáveis reais.
Seja RR →⊆ 2: Xf uma função, com X um conjunto aberto. Um ponto XP∈ é um ponto de máximo local de f , se existir uma vizinhança delta de P tal que
)(,)()( PVQPfQf δ∈∀≤ .
Neste caso, diremos que ( )Pf é o valor máximo de f em )(PVδ . Um ponto XP∈ é um ponto de mínimo local de f , se existir uma vizinhança delta de P tal que
)(,)()( PVQQfPf δ∈∀≤ .
Neste caso, diremos que )(Pf é o valor mínimo de f em )(PVδ . Se )()( PfQf ≤ , para todo XQ∈ , diremos que P é um ponto de máximo absoluto de f . Se )()( QfPf ≤ , para todo XQ∈ , diremos que P é um ponto de mínimo absoluto de f .
Teorema 1.1 (Weierstrass) Seja RR →⊆ 2: Xf uma função, com X um conjunto compacto. Se f é contínua, então f possui pelo menos um ponto de máximo e pelo menos um ponto de mínimo em X .

31
Teorema 1.2 (Teste da Derivada Primeira) Sejam RR →⊆ 2: Xf uma função contínua, com X um conjunto aberto, e XbaP ∈),(= fixado. Suponhamos que P é um ponto de máximo ou mínimo
local de f . Então 0=),( bafx e 0=),( baf y .
Prova. Suponhamos que ),(= baP seja um ponto de máximo local de f . Então existe uma vizinhança delta de P tal que
.)(),(=,)()( PVyxQPfQf δ∈∀≤ .
Assim, fixando by = , o ponto ax = é ponto de máximo local da função ),(=)( bxfxg , pois ax = é um ponto interior ao domínio de g no qual o plano by = intercepta a superfície ),(= yxfz no ponto
),(= baP . Portanto, 0=)(ag ′ , ou seja, 0=)(=),( agbaf x ′ . ■
Exemplo 1.1 Seja RR →2:f a função definida por 22=),( xyyxf − . Então xyxfx 2=),( − e yyxf y 2=),( . Assim, em (0,0)=P , temos que 0=(0,0)xf e 0=(0,0)yf . No entanto, P não é ponto
de máximo e nem de mínimo local de f , pois se fixarmos 0=y e 0≠x , então 0<=,0)(=)( 2xxfxg − , isto é, g tem um máximo em 0=x . Por outro lado, se fixarmos 0=x e
0≠y , então 0>=)(0,=)( 2yyfyh , isto é, h tem um mínimo em 0=y . Portanto, em qualquer vizinhança delta do ponto (0,0)=O existem pontos ),(= yxP tais que )()( OfPf ≤ e )()( OfPf ≥ , respectivamente. Assim, a recíproca do Teorema 1.2 é falsa.
Seja RR →⊆ 2: Xf uma função contínua, com X um conjunto aberto. Diremos que ponto um
XP∈ é um ponto crítico de f se (0,0)=)(Pf∇ ou )(Pf∇ não existe.
Exemplo 1.2 Seja RR →2:f a função definida por 22=),( yxyxf + . Determine, caso existam, os pontos críticos de f . Solução. É fácil verificar que, para (0,0)),( ≠yx ,
2222=),(=),(
yx
yyxfeyx
xyxf yx++
.
Assim, (0,0)),( ≠∇ yxf . Agora, vamos analizar no ponto (0,0)=P .
1,=lim=(0,0),0)(lim=(0,0)
00±
−→→ x
xx
fxffxx
x
isto é, (0,0)xf não existe. De modo análogo, prova-se que (0,0)yf não existe. Portanto, (0,0)f∇ não existe. Consequentemente, (0,0)=P é o único ponto crítico de f .
Exemplo 1.3 Seja RR →2:f a função definida por 22=),( xyyxf − . Determine, caso existam, os pontos críticos de f . Solução. É fácil verificar que xyxfx 2=),( − e yyxf y 2=),( . Logo, (0,0)=),( yxf∇ se, e somente se,
0== yx . Portanto, (0,0)=P é o único ponto crítico de f .
Sejam RR →⊆ 2: Xf uma função contínua, com X um conjunto aberto, que possue derivadas parciais em X e XbaP ∈),(= fixado. Diremos que P é um ponto de sela de f se (0,0)=)(Pf∇ e P

32
não é ponto de máximo e nem de mínimo de f . Por exemplo, o ponto crítico (0,0)=P , do Exemplo 1.1, é um ponto de sela de f .
Teorema 1.3 (Teste da Derivada Segunda) Sejam RR →⊆ 2: Xf uma função, com X um conjunto aberto, e XbaP ∈),(= fixado. Suponhamos que f tenha derivadas parciais segundas contínuas em )(PVδ e (0,0);=)(Pf∇ )(= PfA xx , )(= PfB xy e )(= PfC yy . Então:
1. Se 0<2 ACB − e 0<A , então P é um máximo local de f . 2. Se 0<2 ACB − e 0>A , então P é um mínimo local de f . 3. Se 0>2 ACB − , então P é um ponto de sela de f . 4. Se 0=2 ACB − , então o teste não se aplica.
Observações 1.1
1. Note que, quando 0<2 ACB − , )(= PfA xx desempenha o mesmo papel da derivada segunda de uma função real de uma variável real, por exemplo, se 0>A , então P é um mínimo local de f .
2. Quando 0=2 ACB − o teste da derivada segunda não dá nenhuma informação, ou seja, no ponto ),(= baP qualquer coisa pode ocorrer. Por exemplo, se 44=),( yxyxf + , então f possui um
mínimo no ponto (0,0)=P , mas 0=2 ACB − . Exemplo 1.4 Seja RR →2:f a função definida por 22=),( yxyxf + . Localize e classifique os
pontos críticos de f .
Solução. Como xyxf x 2=),( e yyxf y 2=),( temos que (0,0)=),( yxf∇ se, e somente se, 0=x e
0=y . Assim, (0,0) é o único ponto crítico de f . Agora, para aplicarmos o Teste da Derivada Segunda, devemos determinar as derivadas parciais xxf , xyf , yyf e verificar se elas são contínuas em uma vizinhança
delta de cada um dos pontos críticos. Como 2=),( yxf xx , 0=),( yxfxy e 2=),( yxf yy temos que elas
são claramente contínuas. Agora, se (0,0)=P , então 04=220= 22 <−⋅−− ACB e 0>A . Portanto, (0,0)=P é um ponto de mínimo local de f .
Exemplo 1.5 Seja RR →2:f a função definida por yxyxyxf 332=),( 233 −−+ . Localize e
classifique os pontos críticos de f . Solução. Como xxyxfx 66=),( 2 − e 33=),( 2 −yyxf y temos que (0,0)=),( yxf∇ se, e somente se,
0=66 2 xx − e 0=33 2 −y se, e somente se, 0=x , 1=x e 1y = − e 1=y . Assim, 1)(0,− , (0,1) , 1)(1,− e (1,1) são os pontos críticos de f . Agora, para aplicarmos o Teste da Derivada Segunda,
devemos determinar as derivadas parciais xxf , xyf , yyf e verificar se elas são contínuas em uma vizinhança
delta de cada um dos pontos críticos. Como 612=),( −xyxfxx , 0=),( yxfxy e yyxf yy 6=),( temos
que elas são claramente contínuas. Agora, se 1)(0,= −P , então 036=)6(6)(0= 22 <−−⋅−−− ACB e 0<A .
Portanto, 1)(0,= −P é um ponto de máximo local de f . Se 1)(1,−=P , então 0>36=)6(60= 22 −⋅−− ACB .
Portanto, 1)(1,−=P é ponto de sela de f . Se (0,1)=P , então 0>36=66)(0= 22 ⋅−−− ACB .
Portanto, (0,1)=P é ponto de sela de f . Finalmente, se (1,1)=P , então 0<36=660= 22 −⋅−− ACB e 0>A .

33
Portanto, (1,1)=P é um ponto de mínimo local de f . Note que, 2=1)(0,−f e 3=(1,1) −f são os valores de máximo e mínimo locais de f , respectivamente.
Exemplo 1.6 Uma placa metálica circular com um metro de raio, colocada com centro em (0,0)=O do plano xy , é aquecida, de modo que a temperatura em um ponto ),(= yxP é dada por
CyxxyxT o)402416(=),( 22 ++ , com x e y em metros. Determine a menor e a maior temperatura na placa. Solução. o1. Passo. Faça um esboço da região (use o geogebra)
1}.:),{(= 222 ≤+∈ yxyxX R
Como X é um conjunto compacto temos, pelo Teorema de Weierstrass, que f possui um máximo e um mínimo em X .
o2. Passo. Determine os pontos críticos de T no interior de X , isto é, no conjunto aberto. Como
2432=),( +xyxTx e yyxTy 80=),( temos que (0,0)=),( yxT∇ se, e somente se, 43= −x e 0=y .
Portanto, ⎟⎠⎞
⎜⎝⎛− ,0
43=P é o único ponto crítico de f no interior de X . Agora, para aplicarmos o Teste da
Derivada Segunda, precisamos dos valores 32),( =yxTxx , 0),( =yxTxy e .80),( =yxTyy Agora, se
⎟⎠⎞
⎜⎝⎛− ,0
43=P , então
0560.2=80320= 22 <−⋅−− ACB e 0>A .
Portanto, ⎟⎠⎞
⎜⎝⎛− ,0
43=P é um ponto de mínimo local de T e
CT o90404324
4316=0,
43 2
2
−=⋅+⎟⎠⎞
⎜⎝⎛−+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛− .
o3. Passo. Analizar o comportamento de T na fronteira de X . Se fizermos
cos , [0,2 ]x e y senθ θ θ π= = ∀ ∈ ,
então o ponto ),cos(= θθ senP percorre toda a fronteira de X . Como
θθθθθ 224cos2416),cos()( sensenTg ++== temos que
0)cos21(24cos4824)( =−−=+−=′ θθθθθθ sensenseng
se, e somente se, 0θ = , θ π= , 3πθ = e
56πθ = .
(a) Quando 0θ = , obtemos Cseng o400240cos2416)0( 2 =++= .
(b) Quando θ π= , obtemos Cseng o824cos2416)( 2 −=++= πππ .
(c) Quando 3πθ = , obtemos

34
Cseng o463
243
cos24163
2 =++=⎟⎠⎞
⎜⎝⎛ πππ
.
(d) Quando 56πθ = , obtemos
Cseng o466
5246
5cos24166
5 2 =++=⎟⎠⎞
⎜⎝⎛ πππ
.
Assim, sobre a fronteira da placa, a máxima temperatura é Co46 nos pontos 1 3,2 2
P⎛ ⎞
= ±⎜ ⎟⎜ ⎟⎝ ⎠
e a mínima
temperatura é Co8− no ponto ( 1,0)Q = − , Portanto, –9°C e 46°C são os valores de menor e maior temperatura na placa.
3.2 Multiplicadores de Lagrange
Na seção anterior abordamos o problema de determinar os pontos de máximo e mínimo de uma função em uma região compacta. Nesta seção vamos apresentar um dispositivo para calcular os pontos de máximo e mínimo na fronteira da região.
Teorema 2.1 (Método dos Multiplicadores de Lagrange) Sejam RR →⊆ 2:, Xgf duas
funções, com X um conjunto aberto. Suponhamos que f e g tenham derivadas parciais primeiras contínuas em )(QVδ , que contém a curva C de equação cartesiana 0=),( yxg . Se a restrição de f a C tem um máximo ou mínimo local em um ponto CP∈ e (0,0))( ≠∇ Pg , então existe um R∈λ tal que
(0,0).=)()( PgPf ∇+∇ λ Prova. Veremos a seguir que se (0,0))( ≠∇ Pg , então o Teorema da Função Implícita garante que a curva
0=),( yxg em )(QVδ pode ser representada por uma curva na forma paramétrica ))(),(()( tytxtP = com 0)( ≠′ tP . Sendo assim, suponhamos que a curva C esteja na forma paramétrica e CtytxtP ∈))(),((=)( ,
para todo R∈t . Então, pela Regra da Cadeia, obtemos
ufdtdy
yf
dtdx
xft ⋅∇
∂∂
+∂∂′ ==)(φ ,
co ( ) ( ( )) ( ( ), ( ))t f P t f x t y tφ = = e )(= tPu ′ o vetor tangente à curva C . Como 0=)(tφ′ em qualquer ponto CtP ∈)( , onde f tenha um máximo ou mínimo local, temos que o vetor gradiente )(Pf∇ é perpendicular à curva C . Por outro lado, como o vetor gradiente )(Pg∇ é perpendicular à curva C temos que os vetores f∇ e g∇ são linearmente dependentes. Portanto, existe um R∈λ tal que
(0,0).=)()( PgPf ∇+∇ λ O número real λ é chamado de multiplicador de Lagrange. ■
Observação 2.1 O método dos multiplicadores de Lagrange é equivalente a: para determinar um
ponto crítico de uma função ),(= yxfz sujeito a um vínculo 0=),( yxg , formaremos a função ),(),(=),,( yxgyxfyxF λλ +
e resolveremos o sistema 0=xF , 0=yF e 0=λF .
Exemplo 2.1 Determine a menor distância da origem à hipérbole de equação cartesiana 1=xy .
35
Solução. Já vimos que a distância da origem a um ponto ),(= yxP dessa hipérbole é dada por 22=),( yxPOd + . Portanto, devemos minimizar a função 22=),( yxyxf + sujeita ao vínculo ou à
restrição 01=),( =−xyyxg . Agora, para resolver esse problema devemos dividir a prova em dois passos: o1. Passo. Determine f∇ e g∇ . É fácil verificar que ),2(2=),( yxyxf∇ e ),(=),( xyyxg∇ . Logo,
(0,0)=),( yxg∇ se, e somente se, 0== yx . Como 0(0,0) ≠g temos que o ponto (0,0)P = não está na curva. Assim, (0,0)),( ≠∇ yxg se ( , ) (0,0)x y ≠ . Portanto, pelo Teorema 2.1, existe um R∈λ tal que
(0,0)=),(),( yxgyxf ∇+∇ λ , com ),( yx satisfazendo 0=),( yxg .
o2. Passo. Resolver o sistema para obtermos os pontos críticos de f
⎪⎩
⎪⎨
⎧
=−=+=+
.010202
xyxyyx
λλ
Multiplicando a primeira equação por y e a segunda por x , obtemos
xyyxx
ey
=⇒=⇒−=−= 2222
22 λλ ,
pois 1xy = . Portanto, 111 ==−==⇒== yxouyxxyexy .
Portanto, a distância mínima ocorre nos pontos ( 1, 1)P = − − e (1,1)Q = e
2),(),( == QOdPOd .
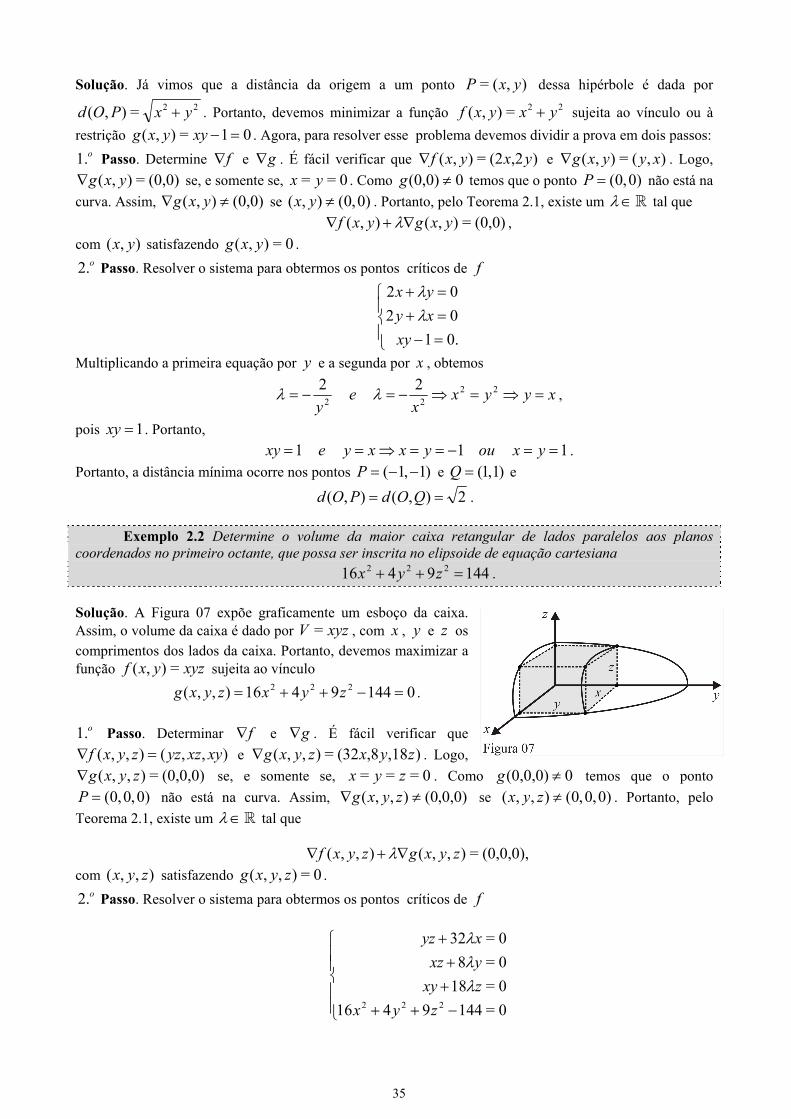
Exemplo 2.2 Determine o volume da maior caixa retangular de lados paralelos aos planos coordenados no primeiro octante, que possa ser inscrita no elipsoide de equação cartesiana
1449416 222 =++ zyx .
Solução. A Figura 07 expõe graficamente um esboço da caixa. Assim, o volume da caixa é dado por xyzV = , com x , y e z os comprimentos dos lados da caixa. Portanto, devemos maximizar a função xyzyxf =),( sujeita ao vínculo
01449416),,( 222 =−++= zyxzyxg .
o1. Passo. Determinar f∇ e g∇ . É fácil verificar que ),,(),,( xyxzyzzyxf =∇ e ),18,8(32=),,( zyxzyxg∇ . Logo,
(0,0,0)=),,( zyxg∇ se, e somente se, 0=== zyx . Como 0(0,0,0) ≠g temos que o ponto (0,0,0)P = não está na curva. Assim, 0,0),(0),,( ≠∇ zyxg se ( , , ) (0,0,0)x y z ≠ . Portanto, pelo
Teorema 2.1, existe um R∈λ tal que
(0,0,0),=),,(),,( zyxgzyxf ∇+∇ λ com ),,( zyx satisfazendo 0=),,( zyxg .
o2. Passo. Resolver o sistema para obtermos os pontos críticos de f
⎪⎪⎩
⎪⎪⎨
⎧
−+++++
0=14494160=180=80=32
222 zyxzxyyxzxyz
λλλ

36
Multiplicando a primeira equação por x , a segunda por y , a terceira por z e somando, obtemos
96=0=)942(163 222 xyzzyxxyz −⇒+++ λλ
Assim,
0=)163(10=)
121(10,=)
31(1 222 zxyeyxzxyz −−− .
Como 0>x , 0>y e 0>z temos que 3=x , 32=y e 3
34=z . Portanto, o volume
1438= ≈V u.v.
Exemplo 2.3 Mostre que, dentre todos os triângulos de mesmo perímetro, o triângulo equilátero tem a maior área.
Solução. Suponhamos que os comprimentos dos lados do triângulo sejam x , y e z , respectivamente. Então o perímetro fixo do triângulo é dado por zyxp ++=2 . Portanto, queremos encontrar o ponto
),,(= zyxP que maximiza a função área do triângulo dada pela fórmula de Heron:
.))()((= pzpypxpA −−−
Neste caso, devemos maximizar a função ))()((=),,( pzpypxpzyxf −−− sujeita ao vínculo 02=),,( =−++ pzyxzyxg .
o1. Passo. Determine f∇ e g∇ . É fácil verificar que
)))((),)((),)(((=),,( pypxppzpxppzpypzyxf −−−−−−∇
e (1,1,1)=),,( zyxg∇ . Logo, (0,0,0)),,( ≠∇ zyxg , para todos x , y e z . Assim, pelo Teorema 2.1, existe um R∈λ tal que
(0,0,0),=),,(),,( zyxgzyxf ∇+∇ λ com ),,( zyx satisfazendo 0=),,( zyxg .
o2. Passo. Resolver o sistema para obtermos os pontos críticos de f
⎪⎪⎩
⎪⎪⎨
⎧
−+++−−+−−+−−
0=20=))((0=))((0=))((
pzyxpypxppzpxppzpyp
λλλ
Multiplicando a primeira equação por px − , a segunda por py − , a terceira por pz − e somando, obtemos
))()(3(=0=))()((3 pzpypxppzpypxp −−−⇒−−−− λλ . Assim,
0.=)2)(3)((0=)2)(3)((0,=)2)(3)(( pzpypxepypzpxpxpzpy −−−−−−−−−
Como xp > , yp > e zp > temos que pzyx32=== . Portanto, o triângulo é equilátero.
Exemplo 2.4 Mostre que se x , y e z são números reais positivos, então
,3
3 zyxxyz ++≤
ou seja, a média geométrica é menor do que ou igual a média aritmética.

37
Solução. Devemos maximizar a função xyzzyxf =),,( sujeita ao vínculo
0=),,( =−++ kzyxzyxg , com k uma constante positiva.
o1. Passo. Determine f∇ e g∇ . É fácil verificar que ),,(=),,( xyxzyzzyxf∇ e (1,1,1)=),,( zyxg∇ . Logo, (0,0,0)),,( ≠∇ zyxg , para todos x , y e z . Assim, pelo Teorema 2.1, existe um R∈λ tal que
(0,0,0),=),,(),,( zyxgzyxf ∇+∇ λ com ),,( zyx satisfazendo 0=),,( zyxg .
o2. Passo. Resolver o sistema para obtermos os pontos críticos de f .
⎪⎪⎩
⎪⎪⎨
⎧
−+++++
.0=0=0=0=
kzyxxyxzyz
λλλ
Multiplicando a primeira equação por x , a segunda por y , a terceira por z e somando, obtemos
.3=0=3 xyzk
kxyz −⇒+ λλ
Assim,
0.=)3(10=)3(10,=)3(1 zk
xyeyk
xzxk
yz −−−
Como 0>x , 0>y e 0>z temos que 3
=== kzyx . Sendo esse o valor máximo de f , devemos ter
,27
=),,(),,(3kkkkfzyxf ≤
para todos x , y , z positivos e kzyx =++ , ou seja,
.3
=3
3 zyxkxyz ++≤
Note que o mesmo raciocínio, aplicado à função nn xxxxf LK 11 =),,( , mostra que a média geométrica de n números reais positivos é menor do que ou igual à média aritmética desses números.
Exemplo 2.5 Determine a menor distância da origem à curva da equação cartesiana 1.0=1)( 32 ≥−− ycomyx
Solução. Já vimos que a distância da origem a um ponto ),(= yxP dessa curva é dada por
22=),( yxPOd + . Portanto, devemos minimizar a função 22=),( yxyxf + sujeita ao vínculo
01)(=),( 32 =−− yxyxg . É fácil verificar que ),2(2=),( yxyxf∇ e )1)3(,(2=),( 2−−∇ yxyxg . Logo, (0,0)=),( yxg∇ se, e somente se, 0=x e 1=y . Como 0=(0,1)g , não podemos garantir a existência de um R∈λ tal que
(0,0),=),(),( yxgyxf ∇+∇ λ com ),( yx satisfazendo 0=),( yxg . De fato, suponhamos que um tal λ exista. Então
⎪⎩
⎪⎨
⎧
−−−−+
.0=1)(0=1)(320=22
32
2
yxyy
xxλ
λ
Pela primeira equação, obtemos 0=x ou 1= −λ . Se 0=x , então pela terceira equação 1=y e pela segunda equação 0=2 , o que é impossvel. Se 1= −λ , então a segunda equação não tem solução. No

38
entando, fazendo o gráfico da curva 3 21= xy + , confira Figura 08, veremos que o problema tem solução com 0=x e 1=y . Portanto, a hipótese
(0,0)),( ≠∇ yxg , do Teorema 2.1, não pode ser omitida.
3.3 Derivadas de funções implícitas
Já vimos, no curso de Cálculo Diferencial e Integral I, que a função 32= 2 −xy define y como uma função explícita de x , pois podemos escrever )(= xfy , com 32=)( 2 −xxf , enquanto a equação
6=24 2 yx − define y como uma função implícita de x . Em geral, f é uma função implícita se, e somente se, a substituição de y por )(xf conduz a uma identidade.
O nosso objetivo nesta seção é encontrar condições que garantam que a equação 0),( =yxF tenha soluções e defina uma de suas variáveis como função da outra. Mais geralmente, 0),,,( 21 =nxxxF K tenha soluções e defina uma de suas variáveis como função das outras.
Teorema 3.1 (Teorema da Função Implícita) Seja RR →⊆ 2: XF uma função, com X um
conjunto aberto. Suponhamos que F tenha derivadas parciais primeiras contínuas em X . Se existir XbaP ∈),(= tal que 0)( ≠PFy (0,0)))(( ≠∇ PF e 0)( =PF , então a equação cartesiana
0),( =yxF determina uma função )(= xfy em )(aVδ tal que )(0,=))(,())(,( aVxxfxFeXxfx δ∈∀∈ .
Além disso,
.=)(y
x
FFxf −′
Prova. Vamos provar apenas a segunda parte do teorema, pois a primeira está além dos propósitos deste texto. Seja ),(= vuFz , com xu = e )(= xfy . Então, pela Regra da Cadeia,
dxdy
yF
dxdu
uF
dxdz
∂∂
+∂∂= .
Como 0))(,(= =xfxFz , para todo )(),( PVyx δ∈ temos que 0=dxdz
. Logo, 1=dxdu
e )(= xfdxdy ′
implicam que )(=0 xfFF yx ′+ . Portanto,
.=)(y
x
FFxf −′
Note que o o resultado contínua verdadeiro se substituirmos y ou x . ■
A Figura 09 expõe graficamente a função )(= xfy como a imagem inversa da função F no ponto 0 , isto é, )(=)0(1 fGF − .

39
Exemplo 3.1 Sejam )(= xfy e 0=1543 34 +−−+ xxyy . Determine dxdy
.
Solução. Seja 1543),( 34 +−−+= xxyyyxF . Então, pelo Teorema 3.1, basta Determine xF e yF .
Como 512= 2 −− xFx e 34= 3 +yFy temos que
34512= 3
2
++
yx
dxdy
.
Exemplo 3.2 (Teorema da Função Inversa) Seja RR→⊆If : uma função, com I um
intervalo aberto. Se f é diferenciável em Ic∈ e 0)( ≠′ cf , então existe uma função )(= ygx diferenciável em um intervalo aberto contendo )(= cfd tal que yygf =))(( e
)(1=)(
xfyg
′′ .
Solução. Seja yxfyxF −= )(),( . Então 0)(=),( ≠′ cfdcFx . Logo, pelo Teorema Função Implícita, existe uma função )(= ygx diferenciável em um intervalo aberto contendo )(= cfd tal que ( ) 0=))((=),( yygfyygF − , ou seja, yygf =))(( . Como )(= xfFx ′ e 1= −yF temos que
)(1=
)(1==)(
xfxfFF
ygx
y
′′−
−−′ .
Observacão 3.1 Se ),( yxF tem derivadas parciais segundas contínuas, então ( ) 0)())(()()(0= 2 =′′+′+′+′+⇒′+ xfFxfFxfFxfFFxfFF yyyyxxyxxyx .
Portanto,
( ) 3
22 2
y
xyyyxxyyxx
FFFFFFFF
xf+−
−=′′ .
Assim, temos uma fórmula de recorrência para obter as derivadas de f de ordem n desde que F tenha derivadas parciais contínuas até essa ordem.
Teorema 3.2 (Teorema da Função Implícita) Seja RR →⊆ 3: XF uma função, com X um conjunto aberto. Suponhamos que F tenha derivadas parciais primeiras contínuas em X . Se existir
XcbaP ∈= ),,( tal que 0)( ≠PFz (0,0,0)))(( ≠∇ PF e 0)( =PF , então a equação cartesiana 0),,( =zyxF determina uma função ),( yxfz = em ( )baV ,δ tal que
),(0,)),(,,()),(,,( baVxyxfyxFeXyxfyx δ∈∀=∈ Além disso,
.==z
y
z
x
FF
yze
FF
xz
−∂∂
−∂∂
Prova. Vamos provar apenas um item da segunda parte do teorema. Sejam ),,(= zvuFw , com
),(= yxfz , ),(= yxux e ),(= yxvy . Então, pela Regra da Cadeia, obtemos
xz
zF
xv
vF
xu
uF
xw
∂∂
∂∂
+∂∂
∂∂
+∂∂
∂∂
∂∂ = .
Como 0)),(,,(= =yxfyxFw , para todo ( )PVzyx δ∈),,( temos que 0=xw∂∂
. Logo, 1=xu∂∂
e 0=xv∂∂

40
implicam que xzFF zx ∂∂
+=0 . Portanto, z
x
FF
xz
−∂∂ = . É importante observar que o resultado contínua
verdadeiro se substituirmos z por x ou y . ■
Exemplo 3.3 Se ),(= yxfz e 0=543222 −+−+ yzzxyzx . Determine xz∂∂
e yz∂∂
.
Solução. Seja 54),,( 3222 −+−+= yzzxyzxzyxF . Então, pelo Teorema 3.2, basta determinar xF , yF
e zF . Como 222= yxzFx + , zxyFy 42= + e yzzxFz 432= 22 +− temos que
.432
42=432
2= 2222
22
yzzxzxy
xze
yzzxyxz
xz
+−+
−∂∂
+−+
−∂∂
Sejam RR →⊆ 2:, XGF duas funções, com X um conjunto aberto. Suponhamos que F e G
tenham derivadas parciais primeiras contínuas em X . O Jacobiano de F e G em relação a u e v é o determinante funcional definido por
uvvuvu
vu GFGFGGFF
vuGFvuJ −
∂∂ ==
),(),(=),( .
3.4 Transformações
Nesta seção vamos estudar as transformações em geral. Em particular, apresentaremos as transformações retangulares, cilíndricas e esféricas que representam uma ferramenta poderosa no cálculo das integrais quando trabalhamos com regiões limitadas e complicadas, ou seja, as transformações têm por finalidade simplificar a descrição de certos conjuntos ou funções.
Seja 22: RR →⊆XT uma função, com X um conjunto não vazio. Se R é um subconjunto de
X , vamos denotar a imagem de R sob T por
}.),(:),({=)( RyxyxTRT ∈
Neste caso, diremos que T transforma R sobre )(RT . É comum representar essa transformação por meio das equações simultâneas
),(),( vugyevufx == , com )),(,),((=),( vugvufyxT .
Note que as curvas u de T ( 1= cu constante) são as imagens de retas horizontais no plano uv e as curvas v de T ( 2= cv constante) são as imagens de retas verticais no plano uv , as quais são chamadas de sistema de coordenadas curvilíneas. Neste caso, a imagem de um retângulo )( uvxy RTR = no plano uv é
uma figura curvilínear delimitada pelas curvas de nível 1cu = e 2cv = , respectivamente. A Figura 10 expõe graficamente a transformação T , com ( )Q T P= .

41
Exemplo 4.1 Seja transformação 22: RR →T definida por θθ rsenyerx == cos .
Então a reta 1=r é transformado no círculo 1=22 yx + . Neste caso, se
}2010:),{( 2 πθθ ≤≤≤≤∈= errR R
representa um retângulo no plano θr , então )(RT representa um disco de centro na origem e raio 1 no plano xy Faça um esboço das regiões.
Observação 4.1 Dados Xyxyx ∈),(),,( 2211 . Se ),(),( 2211 yxyx ≠ implicar que ),(),( 2211 yxTyxT ≠ , diremos que T é injetora. Neste caso, T possui uma inversa
221 )(: RR →⊆− XTT definida por
),(),(),,(),(1 vukyevuhxcomyxvuT ===− .
Exemplo 4.2 Seja transformação 22: RR →T definida por yxveyxu ++− == ,
ou ainda, ),(),( yxyxyxT ++−= .
Então T é injetora com inversa 221 : RR →−T definida por
2=
2= vuyevux ++−
,
ou seja,
.2
,2
=),(1 ⎟⎠⎞
⎜⎝⎛ ++−− vuvuvuT
Suponhamos que a transformação 22: RR →T definida por
( )⎩⎨⎧
),(=),(=
1vugyvufx
seja invertível. Então 221 : RR →−T é definida por
( )⎩⎨⎧
= ),(),(=
2yxkvyxhu
Os sistemas (1) e ( 2 ) são chamados de fórmulas de mudança de coordenadas.
Teorema 4.1 Sejam RR →⊆ 2:, Xgf duas funções, com X um conjunto aberto, e XbaP ∈),(= fixado. Suponhamos que f e g tenham derivadas parciais primeiras contínuas em
( )baV ,δ . Se
),(),(0,),(),(=),( baVvu
vuyxvuJ δ∈∀≠
∂∂
,
então as equações ),(= vufx e ),(= vugy podem ser resolvidas implicitamente para u e v em função de x e y . Além disso,
),(=
),(=,
),(=,
),(=
vuJxve
vuJyv
vuJxu
vuJyu u
yu
xv
yv
x −− .

42
Exemplo 4.2 Seja 22: RR →T a transformação definida por
)0,2[0>,=
cos=πθ
θθ
∈⎩⎨⎧
errsenyrx
.
Determine
),(),(=),(
θθ
ryxrJ
∂∂
.
Solução. Como θcos=rx , θθ rsenx −= , θsenyr = e θθ cos= ry temos que
rsenrsenrsenryxyxr
yxrJ rr =+=+=−=∂∂
= )cos(coscos),(),(),( 22 θθθθθθ
θθ θθ .
Seja 3),,( R∈= zyxP fixado. Chamam-se
coordenadas cilíndricas de P no espaço ao terno ),,( zr θ , com r e θ as coordenadas polares para a projeção do ponto P sobre o plano xy e mantendo-se z fixado. A Figura 11 expõe graficamente as coordenadas cilíndricas do ponto P .Assim, a representação é definida por:
)0,2[0>,=
=cos=
πθθθ
∈⎪⎩
⎪⎨
⎧er
zzrsenyrx
Exemplo 4.3 Determine as coordenadas cilíndricas do ponto )7,3,3( .
Solução. Como 3== yx temos que 23=r e 4
= πθ . Portanto, ⎟⎠⎞
⎜⎝⎛ ,7
4,23 π
são as coordenadas
cilíndricas do ponto )7,3,3( .
Seja 3),,( R∈= zyxP fixado. Chama-se coordenadas esféricas de P no espaço ao terno
),,( φθρ , com OPρ =uuur
, φ o ângulo entre o vetor OPuuur
e o vetor unitário k e θ o ângulo polar associado
a projeção de P sobre o plano xy . A Figura 11 expõe graficamente as coordenadas esféricas do ponto P .
Note que θcos= rx , θrseny = e φρ cos=z . Como r PQ senρ φ= =uuur
temos a representação
⎪⎩
⎪⎨
⎧
.cos==
cos=
φρφθρφθρ
zsensenysenx
Exemplo 4.4 Determine as coordenadas retangulares do ponto. ⎟⎠⎞
⎜⎝⎛
6,
34, ππ
.
Solução. Como 4=ρ , 3
= πθ e 6
= πφ . temos, com alguns cálculos, que 1=x , 3=y e 32=z .
Portanto, ( )3,231, são as coordenadas retangulares do ponto ⎟⎠⎞
⎜⎝⎛
6,
34, ππ
.

43
5. Avaliando o que foi construído
Nesta unidade vimos como aplicar os conhecimentos das derivadas parciais na resolução de problemas práticos de maximizar e minimizar funções que relacionam distância máxima e mínima a um plano, volumes, temperaturas, etc. Portanto, use os resultados e técnicas desenvolvidos nesta unidade no estudo dos problemas de maximizar e minimizar que virão pela frente.
No Moodle
A transformação de todo este conteúdo em conhecimento só se dará com a sua participação efetiva nas atividades propostas no MOODLE. Portanto, programe-se. Planeje seus estudos. Já há muito que estudar sobre este assunto.


















