Formulação Forte do Método sem Malha usando Colocação...
96
Formulação Forte do Método sem Malha usando Colocação Aplicado a Problemas de Potencial e Propagação de Ondas Guilherme Cardoso de Salles Projeto de Graduação apresentado ao Curso de Engenharia Civil da Escola Politécnica, Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários para obtenção do título de Engenheiro. Orientador: Prof. José Antônio Fontes Santiago, D. Sc. Rio de Janeiro Março 2015
Transcript of Formulação Forte do Método sem Malha usando Colocação...

Formulação Forte do Método sem Malha usando Colocação
Aplicado a Problemas de Potencial e Propagação de Ondas
Guilherme Cardoso de Salles
Projeto de Graduação apresentado ao
Curso de Engenharia Civil da Escola
Politécnica, Universidade Federal do
Rio de Janeiro, como parte dos
requisitos necessários para obtenção
do título de Engenheiro.
Orientador:
Prof. José Antônio Fontes Santiago,
D. Sc.
Rio de Janeiro
Março 2015

ii
Formulação Forte do Método sem Malha usando Colocação
Aplicado a Problemas de Potencial e Propagação de Ondas
Guilherme Cardoso de Salles
PROJETO DE GRADUAÇÃO DO CURSO DE ENGENHARIA CIVIL DA
ESCOLA POLITÉCNICA DA UNIVERSIDADE FEDERAL DO RIO DE
JANEIRO.
Examinada por:
________________________________________________
Prof. José Antônio Fontes Santiago, D.Sc. (Orientador)
________________________________________________
Prof. Ricardo Valeriano Alves, D.Sc.
________________________________________________
Prof. Roberto Fernandes de Oliveira, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
MARÇO 2015

iii
de Salles, Guilherme Cardoso
Formulação Forte do Método sem Malha
usando Colocação Aplicado a Problemas de
Potencial e Propagação de Ondas/ Guilherme
Cardoso de Salles - Rio de Janeiro: UFRJ/Escola
Formulação Forte do Método sem Malha
usando Colocação Aplicado a Problemas de
Potencial e Propagação de Ondas/ Guilherme
Cardoso de Salles - Rio de Janeiro: UFRJ/Escola
Politécnica, 2015.
IX, 86 p.: il.; 29,7 cm
Orientador: José Antônio Fontes Santiago
Projeto de Graduação – Universidade
Federal do Rio de Janeiro, Escola Politécnica,
Curso de Engenharia Civil, 2015
Referências Bibliográficas: pág 94-96
1 – Métodos sem Malha. 2 – Método da
Colocação. 3 – Método dos Mínimos Quadrados
Móveis
I. Santiago, José Antônio Fontes. II.
Universidade Federal do Rio de Janeiro III.
Formulação Forte do Método sem Malha usando
Colocação Aplicado a Problemas de Potencial e
Propagação de Ondas

iv
“Now we grow as we show that the morals we must know
Will be shaken and mistaken by the falls along the way”
Bad Religion

v
AGRADECIMENTOS
O primeiro agradecimento tem que ser a minha família, pois sem eles jamais
teria chegado até aqui.
Aos amigos de infância, de longa data por estarem sempre comigo, eles sabem
quem são. Aos grandes amigos que fiz nesses 5 anos de graduação na UFRJ.
Aos professores do curso de Engenharia Civil em especial aos que realmente
tiveram papel de professor, aqueles que sempre incentivaram a busca pelo
conhecimento e me inspiram para ser um grande profissional. Felizmente a maioria
dos professores teve esse perfil.
Ao Augusto, Oswaldo e todos da TECTON Engenharia por terem me recebido
e tratado sempre tão bem, mais do que os ensinamentos de engenharia (que foram
muitos) ficarão os exemplos de honestidade, humanidade, caráter, dedicação e bom
humor.
Ao Prof. Santiago, pela grande competência, paciência e tranquilidade para me
conduzir nesse projeto, além de ser um exemplo de grande professor e pessoa.
Por último mas não menos importante (ao contrário), o agradecimento aos
meus 3 orientadores fundamentais: minha mãe, Claudia, meu pai, Gil, e meu irmão,
Daniel, que serão sempre meus guias e protetores. Como diria uma música: “They’re
all looking down on you. Inside they know what’s best for you”.

vi
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Civil.
Formulação Forte do Método sem Malha usando Colocação Aplicado a
Problemas de Potencial e Propagação de Ondas
Guilherme Cardoso de Salles
Março/2015
Orientador: Prof. José Antônio Fontes Santiago, D.Sc.
Curso: Engenharia Civil
Os Métodos sem Malha (MSM), recentemente pesquisados, apresentam
conceitos inovadores que permitem sua aplicação a classes de problemas resolvidos
pelos métodos tradicionais e, principalmente, a outras classes de problemas que esses
métodos têm dificuldades de simular, por sua formulação dependente de malha.
Esse projeto trata de uma introdução a um Método sem Malha específico,
estabelecendo seus conceitos fundamentais, suas limitações e campos de aplicação.
Apresenta-se o Método sem Malha obtido através da formulação forte que utiliza o
Método dos Resíduos Ponderados com funções de aproximação construídas pelo
Método dos Mínimos Quadrados Móveis. Essa formulação é aplicada para problemas de
distribuição de temperatura (Equação de Laplace), problemas de peso próprio (Equação
de Poisson) e de propagação de ondas (Equação de Helmholtz) para comparação com as
soluções analíticas.
Palavras-chave: Métodos Numéricos, Métodos sem Malha, Método da
Colocação, Mínimos Quadrados Móveis

vii
Abstract of the Undergraduate Project presented to POLI/UFRJ as a partial fulfillment
of the requirements for the degree of Civil Engineer.
Strong Formulation of the Meshless Method using Collocation Applied
to Potential Problems and Waves Propagation
Guilherme Cardoso de Salles
March/2015
Advisor: José Antônio Fontes Santiago (D.Sc.)
Course: Civil Engineering
The recently researched Meshless Methods (MSM) present innovative concepts
allowing their application to problems solved by traditional methods and, especially, to
other types of problems which the latter have difficulties to simulate, due to their mesh-
dependent formulation.
This work deals with an introduction to Meshless Methods, establishing their
fundamental concepts, limitations and fields of application. The Meshless Method
obtained by means of strong formulation is presented using the Weighted Residual
Methods with approximation functions constructed by the Moving Least Squares
Method. This formulation is applied to problems of temperature distribution (Laplace’s
equation), self-weight problems (Poisson's equation) and wave’s propagation
(Helmholtz equation) in order to compare with analytical solutions.
Keywords: Numerical Methods, Meshless Methods, Collocation Method,
Moving Least Square Approximation

viii
SUMÁRIO
CAPÍTULO 1 – INTRODUÇÃO ....................................................................................... 10
1.1 MOTIVAÇÃO ............................................................................................................... 10
1.2 OBJETIVOS .................................................................................................................. 11
1.3 ORGANIZAÇÃO DO TRABALHO .................................................................................... 11
CAPÍTULO 2 – MÉTODOS SEM MALHA (MESHLESS METHODS) ...................... 12
2.1 DEFINIÇÃO E CAMPO DE DESENVOLVIMENTO ............................................................. 12
2.2 MÉTODOS SEM MALHA E MÉTODO DOS ELEMENTOS FINITOS ..................................... 12
2.3 EVOLUÇÃO DOS MÉTODOS SEM MALHA ..................................................................... 15
2.4 FORMULAÇÕES FORTES E FRACAS ............................................................................... 16
CAPÍTULO 3 – MÉTODOS DE INTERPOLAÇÃO ....................................................... 18
3.1 INTERPOLAÇÃO UTILIZANDO FUNÇÕES DE BASE RADIAL (FBR) .................................... 18
3.1.1 Considerações Iniciais ....................................................................................................... 18
3.1.2 Funções de Base Radial ..................................................................................................... 18
3.1.3 Formulação da Interpolação para Função Multiquádrica ................................................. 19
3.1.4 Determinação dos Coeficientes .................................................................................. 19
3.1.5 Função de Interpolação ..................................................................................................... 20
3.1.6 Aplicação do Método ........................................................................................................ 20
3.2 MÉTODO DOS MÍNIMOS QUADRADOS MÓVEIS (MMQM) ........................................... 23
3.2.1 Considerações Iniciais ....................................................................................................... 23
3.2.2 Formulação Básica ............................................................................................................. 23
3.2.3 Determinação da função de interpolação ......................................................................... 24
3.2.4 Função Peso ...................................................................................................................... 28
3.2.5 Aplicação do Método ........................................................................................................ 32
CAPÍTULO 4 – APLICAÇÃO DOS MÉTODOS DOS RESÍDUOS PONDERADOS EM
EQUAÇÕES DIFERENCIAIS PARCIAIS ........................................................................ 36

ix
4.1 CONSIDERAÇÕES INICIAIS ........................................................................................... 36
4.2 CLASSIFICAÇÃO DAS EQUAÇÕES DIFERENCIAIS ............................................................ 36
4.3 FORMULAÇÃO GERAL DO MRP .................................................................................... 37
4.3.1 Método da Colocação........................................................................................................ 39
4.3.2 Método de Galerkin .......................................................................................................... 41
4.3.3 Método da Subregião ou Subdomínio............................................................................... 42
CAPÍTULO 5 – IMPLEMENTAÇÃO NUMÉRICA ........................................................ 43
5.1 MÉTODO DOS MÍNIMOS QUADRADOS MÓVEIS ........................................................... 43
5.1.1 Dados de Entrada .............................................................................................................. 43
5.1.2 Algoritmo ........................................................................................................................... 44
5.2 MÉTODO DA COLOCAÇÃO ........................................................................................... 45
5.2.1 Dados de Entrada .............................................................................................................. 45
5.2.2 Algoritmo ........................................................................................................................... 45
CAPÍTULO 6 – APLICAÇÕES NUMÉRICAS ................................................................ 47
6.1 EQUAÇÃO DE LAPLACE ................................................................................................ 47
6.1.1 Aplicação 1 ........................................................................................................................ 47
6.1.2 Aplicação 2 ........................................................................................................................ 54
6.2 EQUAÇÃO DE POISSON ............................................................................................... 63
6.2.1 Aplicação 1 ........................................................................................................................ 65
6.2.2 Aplicação 2 ........................................................................................................................ 71
6.3 EQUAÇÃO DA ONDA ................................................................................................... 79
6.3.1 Frequência de 0,1 Hz ......................................................................................................... 81
6.3.2 Frequência 20 Hz ............................................................................................................... 83
6.3.3 Frequência de 50 Hz .......................................................................................................... 86
6.4 ANÁLISE DOS RESULTADOS ......................................................................................... 88
CONCLUSÃO ...................................................................................................................... 93
REFERÊNCIAS BIBLIOGRÁFICAS ................................................................................ 94

10
CAPÍTULO 1 – INTRODUÇÃO
O presente Projeto de Graduação é dirigido para o estudo dos relativamente
recentes Métodos sem Malha (Meshless Methods), que representam uma área ainda
bastante inexplorada, mas com grande potencial de aplicação a problemas de
engenharia.
1.1 MOTIVAÇÃO
Na engenharia civil, sobretudo na análise estrutural, a forma de modelagem de
problemas mais utilizada é a por Elementos Finitos. Desenvolvido a partir da análise
matricial de estruturas, o Método dos Elementos Finitos (MEF) apresenta maior
generalidade que o primeiro ao permitir também análise de estruturas contínuas bi e
tridimensionais. Além disso, sua metodologia herdada da análise matricial de montagem
de matrizes de rigidez e vetores de cargas nodais equivalentes facilita a implementação
computacional. Basicamente o MEF aplicado à análise estrutural parte da discretização
do meio contínuo e matrizes de interpolação para determinar deslocamentos em um
ponto interior do elemento em função dos seus deslocamentos nodais.
A análise por elementos finitos foi largamente difundida, existem inúmeros
softwares no mercado (Ansys, SAP e Abaqus para citar alguns) que utilizam este
método para os mais diversos problemas de engenharia desde estruturas mais simples,
com não linearidade física e geométrica até problemas geotécnicos, de fluxos térmico e
hidráulico.
Entretanto para análises de fenômenos de formação e propagação de
descontinuidades, por exemplo, de propagação de fissuras, BARROS (2002) ressalta
que é necessária uma série de artifícios numéricos, sobretudo a redefinição da malha,
para que as singularidades possam ser adequadamente simuladas pelo MEF. Nesse
contexto, os métodos sem malha tornam-se uma ferramenta mais adequada que os
métodos dos elementos finitos.

11
1.2 OBJETIVOS
O objetivo primário desse projeto é apresentar os conceitos básicos e definidores
dos Métodos sem Malha (MSM), estabelecendo-se comparações com os métodos mais
tradicionais. Existem várias vertentes dos MSM, porém não é objetivo do trabalho fazer
uma extensa revisão de todas as metodologias, mas sim apresentar uma visão global dos
Métodos, que permita a compreensão dos conceitos inovadores desse campo.
Para consolidar a apresentação teórica, aplicações de uma modalidade de
Métodos sem Malha a problemas clássicos de Engenharia são feitas, através de
programas desenvolvidos com o software Matlab (R2011a).
1.3 ORGANIZAÇÃO DO TRABALHO
No capítulo 2, são apresentados a definição de um Método sem Malha, as
principais áreas de aplicação, tipos de formulação possíveis e um breve histórico dos
métodos. Além disso, são traçadas comparações entre MSM e o MEF.
O capítulo 3 contempla os métodos de interpolação, especificamente os por
Função de Base Radial (FBR) com suporte global e dos Mínimos Quadrados Móveis
(MMQM) com suporte local, ambos são utilizados como funções de aproximação sem
Malha.
No Capítulo 4, o Método dos Resíduos Ponderados em Equações Diferenciais é
descrito com especial atenção ao Método da Colocação, que será empregado na
aplicação numérica.
A implementação numérica dos Métodos da Colocação e dos Mínimos
Quadrados Móveis é feita no Capítulo 5, com a descrição dos algoritmos aplicados.
Os exemplos de aplicação numérica a Equações de Poisson, Laplace e de
propagação de ondas com o programa desenvolvido no MATLAB (R2011a) são
apresentados no Capítulo 6.
Finalmente, o capítulo 7 apresenta as conclusões e futuros caminhos de estudo.

12
CAPÍTULO 2 – MÉTODOS SEM MALHA (MESHLESS
METHODS)
2.1 DEFINIÇÃO E CAMPO DE DESENVOLVIMENTO
Segundo DUARTE (1995), Métodos sem Malha são métodos numéricos para
solução de problemas de valor de contorno, PVC, cujas equações básicas de governo do
modelo discreto independem da definição de uma malha.
O principal campo de utilização dos Meshfree Methods é nas simulações de
processos de extrusão e moldagem, análises de formação e propagação de
descontinuidades, as chamadas Mecânica do Dano Contínuo (MDC) e Mecânica da
Fratura, problemas de grandes deformações e de contornos variáveis. Por construírem
aproximações apenas em termos dos nós, os métodos sem Malha são ideais para essa
classe de fenômenos (BELYTSCHKO et al, 1996).
2.2 MÉTODOS SEM MALHA E MÉTODO DOS ELEMENTOS
FINITOS
A definição dos Métodos sem Malha evidencia a principal diferença para o
Método dos Elementos Finitos. Para o último é fundamental a definição da malha de
elementos e pontos e o estabelecimento das conectividades entre os mesmos.
Ao contrário dos Métodos sem Malha, a utilização dos Métodos dos Elementos
Finitos para os problemas citados anteriormente exige a redefinição da malha a cada
evolução do problema de forma a coincidir com as descontinuidades ou contornos, isso
pode gerar a degradação da precisão dos resultados além de dificultar a implementação
computacional e tornar o processo como um todo mais lento (BELYTSCHKO et al,
1996).
Outra limitação do Método dos Elementos Finitos (LIU, 2010) reside no fato que
o lançamento de uma boa malha é um pré-requisito do método e esse é um processo que
depende basicamente do usuário, sua automação é algo complicado de realizar.
Ao construir aproximações dependentes apenas de pontos, os Meshless Methods
contornam grande parte dos problemas descritos no parágrafo anterior. Entretanto,

13
BELYTSCHKO et al.(1996) ressalta que em vários dos Métodos Sem Malha, algumas
etapas necessitam da definição de uma malha, sobretudo na fase de integração no
domínio do problema em formulações enfraquecidas. Deve ser observado que as malhas
passam a desempenhar um papel coadjuvante, a qualidade delas não é fundamental para
a solução. Nesse contexto, LIU (2010) define informalmente Meshfree Methods como
métodos em que malhas podem ser geradas automaticamente, não têm importância vital
para a solução e as operações numéricas (integração, interpolação etc) não dependem do
estabelecimento de elementos como no MEF.
A primeira vista parece ser então mais vantajoso utilizar amplamente os
Métodos sem Malha, já que apresentam maior versatilidade, entretanto estes ainda não
apresentam um nível de desenvolvimento/estudo comparável ao MEF e, portanto, são
mais lentos e menos robustos, o que ainda não compensa totalmente seu uso. Dessa
forma, a técnica mais vantajosa é acoplar os dois métodos no mesmo problema,
utilizando o Meshless apenas nos sub-domínios em que são esperados problemas de
descontinuidades (BELYTSCHKO et al., 1996).
Existe ainda o chamado Método dos Elementos Finitos Generalizados (MEFG),
que pode ser considerado um meio termo entre o MEF e os Métodos Sem Malha, pois
emprega estratégias do último dentro de uma estrutura típica do primeiro mas
minimizando a importância da malha. Como referência podemos citar BARROS (2002)
que apresenta a formulação do MEFG e o aplica a problemas de mecânica do dano
contínuo.
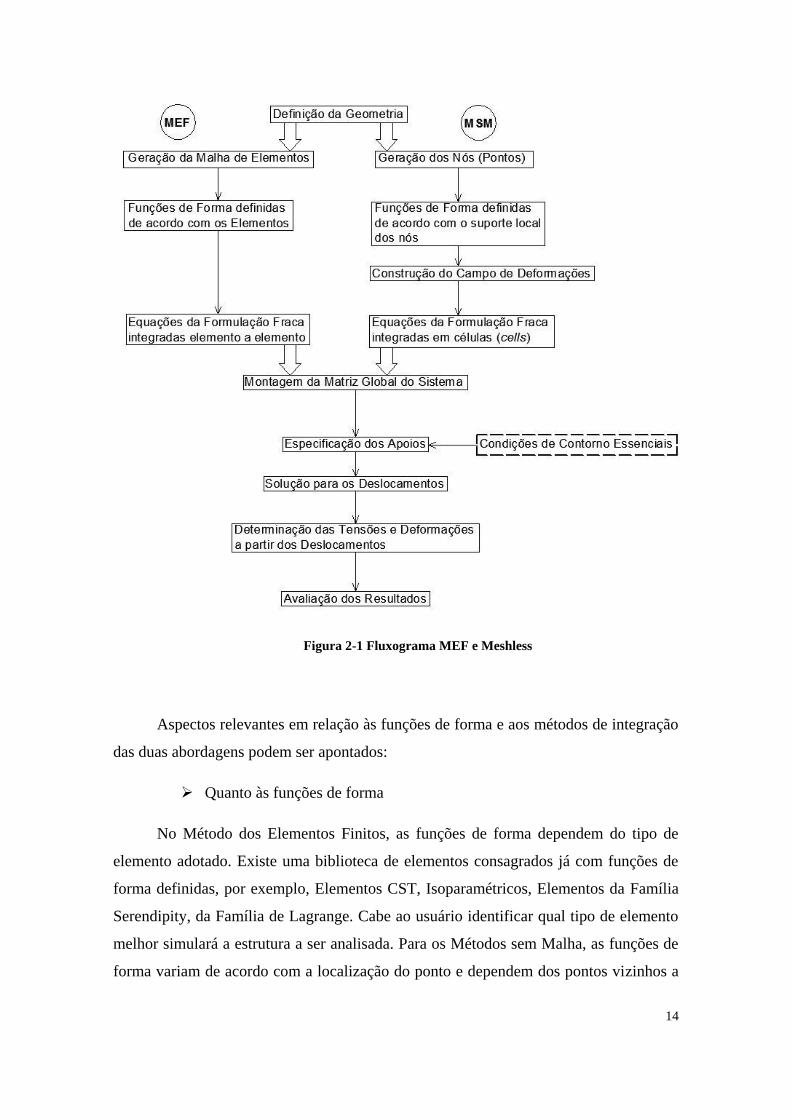
O fluxograma abaixo (figura 2-1) traduzido de LIU (2010) resume as principais
diferenças entre as duas abordagens para formulações enfraquecidas de problemas da
mecânica dos sólidos.
14
Figura 2-1 Fluxograma MEF e Meshless
Aspectos relevantes em relação às funções de forma e aos métodos de integração
das duas abordagens podem ser apontados:
Quanto às funções de forma
No Método dos Elementos Finitos, as funções de forma dependem do tipo de
elemento adotado. Existe uma biblioteca de elementos consagrados já com funções de
forma definidas, por exemplo, Elementos CST, Isoparamétricos, Elementos da Família
Serendipity, da Família de Lagrange. Cabe ao usuário identificar qual tipo de elemento
melhor simulará a estrutura a ser analisada. Para os Métodos sem Malha, as funções de
forma variam de acordo com a localização do ponto e dependem dos pontos vizinhos a

15
ele, conhecidos como suporte local. Essa característica confere grande flexibilidade à
construção de funções de forma nos processos sem Malha.
Quanto à integração no domínio do problema
No MEF, a forma de integração é bem estabelecida e confiável, a integral é feita
por métodos numéricos, principalmente pela Quadratura Gaussiana, em cada elemento,
e a soma delas fornece a integral em todo o domínio. Já nos Métodos sem Malha, a
integração exige maiores cuidados e geralmente recorre-se a criação de background
cells, uma espécie de malha. Formas de definição dessa malha variam de acordo com o
método.
Para a grande maioria dos pesquisadores que trabalham nesta área, o verdadeiro
Método sem Malha é aquele que não utiliza nenhum tipo de elementos com suas
conectividades e muito menos células, dividindo toda a região, para a integração
numérica.
2.3 EVOLUÇÃO DOS MÉTODOS SEM MALHA
Os Métodos sem Malha surgiram na década de 70, entretanto até 1990 não houve
grande interesse em pesquisas para seu desenvolvimento. O ponto de partida para o
Método foi o Smooth Particle Hydrodinamics (SPH), apresentado por LUCY (1977) e
utilizado na modelagem de fenômenos astrofísicos sem contornos como explosões de
estrelas e nuvens de poeira. Somente na década de 90 surgiu uma nova vertente para a
elaboração dos Meshfree Methods, que utilizava o Moving Least Square Approximation
(MLS) ou Método dos Mínimos Quadrados Móveis (MMQM). Originalmente, o
MMQM foi proposto por matemáticos (LANCASTER e SALKAUSKAS 1981) para
ajuste de curvas e superfícies.
NAYROLES et al.(1992) foram os primeiros a utilizar o MLS no chamado
Método dos Elementos Difusos (Diffuse Element Method). Posteriormente,
BELYTSCHKO et al. (1994) modificou o método, o que deu origem ao método
Element-free Galerkin (EFG). BABUSKA e MELENK (1995) e LIU et al.(1996) foram
os primeiros a provar a convergência dos métodos. Estudos mais recentes focam na

16
integração numérica aplicada nos Meshless Methods, como os de BABUSKA et al.
(2009), KHOSRAVIFARD e HEMATIYAN(2010) e RACZ e BUI(2012).
Abordagens sem malha voltadas para resolução de Equações Diferenciais
Parciais, que são o foco desse trabalho, tiveram seus primeiros registros em HARDY
(1971), com o uso de Funções de Base Radial para interpolação e em KANSA (1990),
com a aplicação em equações diferenciais.
2.4 FORMULAÇÕES FORTES E FRACAS
Duas abordagens podem ser utilizadas para a resolução de um problema de
engenharia governado por uma Equação Diferencial Parcial (EDP), a formulação forte e
a formulação fraca.
Na primeira, o objeto de estudo é diretamente a EDP, isto é, a partir da
discretização do fenômeno são aplicados métodos para resolução da Equação
governante. Essa formulação será aplicada nos problemas apresentados nesse trabalho.
Nas formulações fracas, primeiro é estabelecida uma forma alternativa de equações que
governam o fenômeno e essas equações são resolvidas. Em geral, as equações
“enfraquecidas” são da forma integral, ou seja, a resolução avalia o comportamento
global do sistema e busca a solução que melhor balanceia esse comportamento (LIU
2010).
A abordagem por energia é um exemplo de formulação variacional, considerada
como fraca por alguns pesquisadores, por exemplo em LIU (2010). Nela calcula-se a
Energia Potencial Total do sistema e aplica-se o princípio da Energia Potencial Total
Estacionária para determinar o campo de deslocamentos que extremiza a Energia Total.
A avaliação por energia exige apenas a existência de derivadas primeiras das tensões e
deformações, uma condição que justificaria sua eventual classificação como formulação
fraca.
Sobre as duas abordagens, LIU (2010) afirma que formulações enfraquecidas são
mais confiáveis, estáveis, robustas, eficientes e precisas.

17
O método dos Elementos Finitos possui formulação enfraquecida, já os Métodos
sem Malha podem ser formulados das duas formas.
Os principais Métodos sem Malha com Formulação Enfraquecida são:
Smooth Particle Hydrodynamics (SPH) – LUCY (1977) e MONAGHAN
(1982): utiliza aproximação por partículas e funções de Kernel para
aproximar parâmetros físicos
Diffuse Element Method (DEM) – NAYROLES et al.(1992): utiliza
funções de forma construídas pelo Método dos Mínimos Quadrados
Móveis e formulação de Galerkin
Element-free Galerkin (EFG) – BELYTSCHKO et al. (1994): semelhante
ao DEM, apresenta algumas modificações como utilização de mais
pontos de integração e consideração mais precisa das derivadas das
funções de aproximação
Partition of Unity Methods – BABUSKA e MELENK (1995)
Meshless Local Petrov-Galerkin (MLPG) – SLADEK et al. (2013)
Podemos citar como Métodos sem Malha com Formulação Forte:
Finite Point Method – ONATE et al.(1996): gera funções pelo Moving
Least Square Approximation e utiliza o método da Colocação
Stabilized local collocation method – LIU e KEE (2006), KEE et
al.(2007)
Método das Nuvens hp – DUARTE e ODEN (1995): utiliza funções de
forma construídas a partir de Partições da Unidade. Pode ter também uma
formulação enfraquecida.
A parte dos métodos já conhecidos e bem estabelecidos, qualquer método que se
proponha a analisar um fenômeno sem depender fundamentalmente do estabelecimento
de elementos (grid), mas apenas em termos de pontos é considerado um Método sem
Malha.

18
CAPÍTULO 3 – MÉTODOS DE INTERPOLAÇÃO
Interpolar uma função f(x) consiste em aproximar essa função por uma outra
função g(x), escolhida entre uma classe de funções definida a priori e que satisfaça
algumas propriedades (RUGGIERO e LOPES, 1996). Para fazer essa aproximação são
conhecidos os valores de f(x) para N pontos distintos x1, ..., xN e a função g(x) deve
atender a g(xi) = f(xi) para i = 1, ..., N.
Existem diversos meios de interpolar curvas e superfícies, nesse trabalho nos
interessam os métodos empregados por formulações sem Malha.
3.1 INTERPOLAÇÃO UTILIZANDO FUNÇÕES DE BASE
RADIAL (FBR)
3.1.1 Considerações Iniciais
O primeiro trabalho de pesquisa usando Funções de Base Radial para métodos de
interpolação foi o de HARDY (1971), que desenvolveu o método para aproximação de
superfícies geográficas. MICCHELLI (1986) mostrou que a interpolação por FBR
sempre resulta em um sistema que pode ser resolvido. Posteriormente, KANSA (1990)
aplicou com sucesso o método a equações diferenciais parciais parabólicas, hiperbólicas
e elípticas.
3.1.2 Funções de Base Radial
Funções de Base Radial podem ser definidas como funções que apresentam
simetria radial, isto é, dependem apenas da distância de um ponto genérico x ao centro
da função xj. Essas funções podem ter suporte global (definidas em todo o domínio) ou
local (compactas).
Alguns exemplos de funções de base radial são:
Multiquádrica - , sendo c uma constante
Multiquádrica Recíproca –
, sendo c uma

19
constante
Gaussiana – , sendo c uma constante
3.1.3 Formulação da Interpolação para Função
Multiquádrica
Considera-se uma função aproximadora de f(x) da seguinte forma:
(3.1)
Onde N é o número de pontos xj distribuídos no domínio e contorno cujos
valores de f(xj) são conhecidos.
é a função de base radial utilizada (multiquádrica):
A constante c deve atender:
são os coeficientes a determinar que combinam as funções de base radial
3.1.4 Determinação dos Coeficientes
Será adotado um suporte global, isto é, serão considerados todos os N pontos sob
influência do ponto de interesse xi. Deve-se verificar para interpolação:
(3.2)
Para i=1, ..., N
Sendo os valores conhecidos da função nos pontos .
20
Expandindo em matrizes a equação 3.2, tem-se então um sistema linear para
determinar :
3.1.5 Função de Interpolação
A função aproximada em 3.1 pode ser reescrita da seguinte forma:
(3.3a)
Sendo a função de interpolação:
A equação (3.3a) escrita matricialmente é da forma:
(3.3b)
3.1.6 Aplicação do Método
A seguir é apresentado um exemplo de aplicação do método:
A função a ser interpolada é:
para
Obtém-se as seguintes aproximações, para as quantidades N de pontos
igualmente espaçados:

21
N=5
Figura 3-1 Interpolação por FBR N=5
N=10
Figura 3-2 Interpolação por FBR N=10
0 1 2 3 4 5 6 7 8 9 10-10
-8
-6
-4
-2
0
2
4
6
8
x
f(x)
Interpolação com FBR N=5
Pontos Considerados
Função Aproximada
Função Exata
0 1 2 3 4 5 6 7 8 9 10-10
-8
-6
-4
-2
0
2
4
6
8
x
f(x)
Interpolação com FBR N=10
Pontos Considerados
Função Aproximada
Função Exata

22
N=20
Figura 3-3 Interpolação por FBR N=20
N=40
Figura 3-4 Interpolação por FBR N=40
Claramente, com o aumento da quantidade de pontos a função de aproximação se
aproxima da solução exata.
0 1 2 3 4 5 6 7 8 9 10-10
-8
-6
-4
-2
0
2
4
6
8
x
f(x)
Interpolação com FBR N=20
Pontos Considerados
Solução Aproximada
Solução Exata
0 1 2 3 4 5 6 7 8 9 10-10
-8
-6
-4
-2
0
2
4
6
8
x
f(x)
Interpolação com FBR N=40
Pontos Considerados
Função Aproximada
Função Exata
23
3.2 MÉTODO DOS MÍNIMOS QUADRADOS MÓVEIS
(MMQM)
3.2.1 Considerações Iniciais
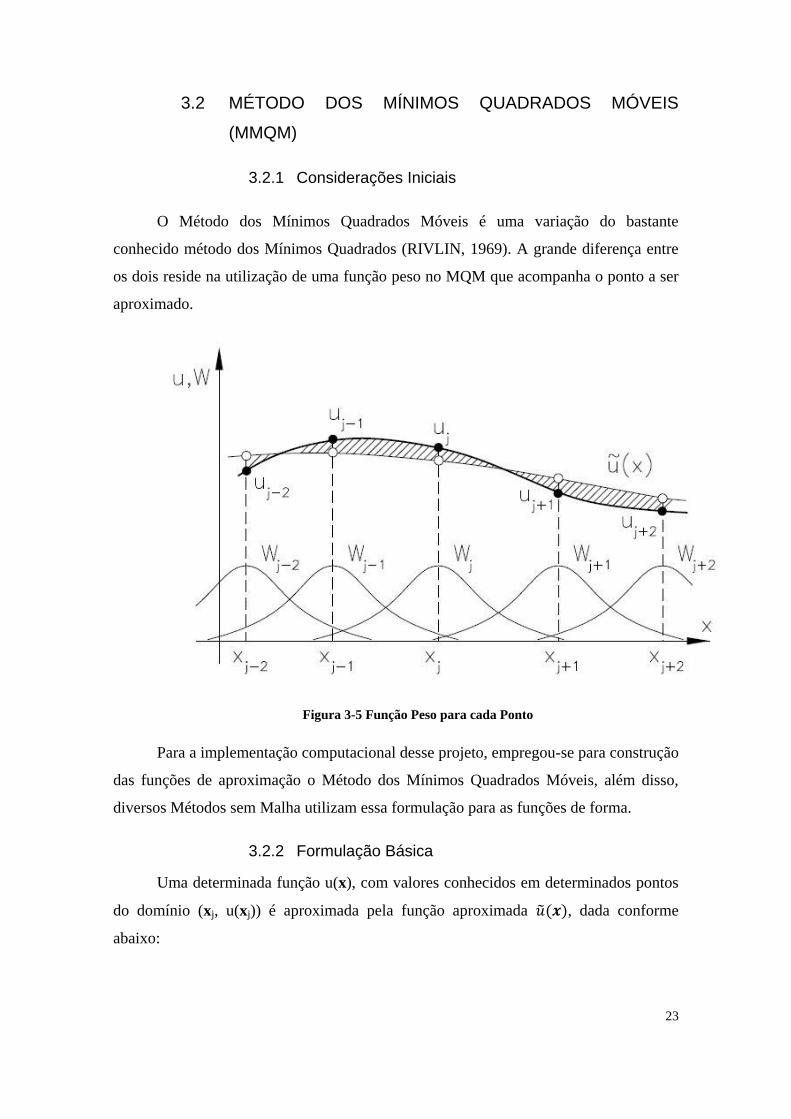
O Método dos Mínimos Quadrados Móveis é uma variação do bastante
conhecido método dos Mínimos Quadrados (RIVLIN, 1969). A grande diferença entre
os dois reside na utilização de uma função peso no MQM que acompanha o ponto a ser
aproximado.
Figura 3-5 Função Peso para cada Ponto
Para a implementação computacional desse projeto, empregou-se para construção
das funções de aproximação o Método dos Mínimos Quadrados Móveis, além disso,
diversos Métodos sem Malha utilizam essa formulação para as funções de forma.
3.2.2 Formulação Básica
Uma determinada função u(x), com valores conhecidos em determinados pontos
do domínio (xj, u(xj)) é aproximada pela função aproximada , dada conforme
abaixo:

24
(3.4a)
Ou na forma matricial:
(3.4b)
Onde pi(x) corresponde a uma base completa de m monômios e ai(x) são os
coeficientes a determinar que combinam os monômios. Alguns exemplos de bases de
monômios são:
Base linear unidimensional: pT
= (1,x) m=2
Base linear bidimensional: pT
= (1,x,y) m=3
Base quadrática unidimensional: pT
= (1,x,x²) m=3
Base quadrática bidimensional: pT
= (1,x,y,x²,xy,y²) m=6
Para casos bidimensionais a fórmula abaixo pode ser utilizada para determinar o
número de termos da base de monômios:
Sendo
mb = 1 para base linear
mb = 2 para base quadrática
mb = 3 para base cúbica e assim sucessivamente
3.2.3 Determinação da função de interpolação
Para o suporte local de x, isto é, o subdomínio onde é interpolado a partir
dos pontos conhecidos xj, podemos reescrever a função aproximada como
no ponto x com a contribuição dos monômios aplicados em xj :

25
(3.5)
Adota-se um raio do suporte Rj para o estabelecimento do suporte local de cada
ponto x. Esse raio deve garantir no mínimo um número de pontos n(x), tal que n(x) ≥
m dentro do suporte.
Figura 3-6 Suporte local para um ponto genérico (x,y)
Uma função J(x) de resíduo quadrático ponderado pode ser construída usando os
valores aproximados :
(3.6)

26
Sendo:
n a quantidade de pontos no suporte local de x
a função peso
o valor conhecido de u(x) no ponto xj
Substituindo a expressão 3.5 de na fórmula 3.6 do Resíduo:
(3.7)
Matricialmente J(x) pode ser escrito conforme abaixo:
(3.8)
Onde:
(n x m)
Matriz Diagonal (n x n)
Matriz Coluna (n x 1)
Matriz Coluna (m x 1)
O valor de a(x) será aquele que minimizar J(x):

27
Derivando a expressão 3.8 e igualando a zero, chega-se a:
(3.9)
(3.10)
Fazendo os produtos de matrizes em 3.10, tem-se:
(3.11)
Sendo:
Matriz (m x n)
Matriz Simétrica (m x m)
Finalmente a(x) é obtido de 3.11:
(3.12)
Retornando à expressão inicial 3.4b de :
(3.13)
A função de interpolação pode ser definida como:
(3.14)
Sendo Matriz Linha (1 x n)
Substituindo 3.14 na expressão 3.13, a função aproximada terá a seguinte forma:

28
(3.15a)
ou algebricamente:
(3.15b)
O cálculo da inversa de A(x) para cada ponto analisado é uma das etapas mais
custosas computacionalmente do método e está diretamente ligada à escolha do raio do
suporte Rj. A condição de n(x) ≥ m é necessária, mas não suficiente para a existência de
A-1
(x) (DUARTE 1996). Por outro lado, raios muito elevados podem levar a perda de
localidade da aproximação. Essas restrições afetam a liberdade de definição da
distribuição nodal.
Uma alternativa para o enriquecimento da aproximação é a introdução de novos
termos de graus mais elevados na base de monômios, o que pode levar a matrizes A de
elevada ordem, representando outra possível dificuldade computacional (BARROS
2002).
3.2.4 Função Peso
A escolha da função peso (w) é um dos fatores mais importantes para a
qualidade da aproximação pelo Moving Least Square, pois é o que garante a localidade
do suporte e a compatibilidade das funções de forma do método. Em FERREIRA
(2003) um exemplo simples, reproduzido a seguir, ratifica essa afirmação. Para
aproximar o valor de ln(10) foram utilizadas duas funções peso diferentes e mantendo-
se os demais parâmetros iguais, a saber, mesma base de monômios (linear) e mesma
quantidade de pontos de amostragem (0, 0.01, 1, 2, 3, ...19, 20). No primeiro caso, a
função peso adotada foi uma função constante, ao passo que no segundo, foi adotada
uma função peso nula em todos os pontos exceto para valores de x entre 7 e 11.
Nos gráficos a seguir, as curvas em azul são as funções a serem aproximadas,
com os pontos conhecidos marcados, as curvas em rosa são as funções peso e em
vermelho são os polinômios de 1º grau calculados pela aproximação.

29
Figura 3-7 Gráficos de aproximação para Funções Peso distintas (Ferreira(2003))
A primeira função peso tratou indiscriminadamente pontos próximos de x=10 e
pontos distantes na minimização do erro; já a segunda função considerou apenas os
pontos mais próximos de x=10 ao ser nula fora das proximidades dele. Como
consequência disso, os resultados ficaram muito mais próximos do correto na segunda
situação.
Genericamente, a função peso deve possuir um formato de “sino”, isto é, deve
possuir um valor máximo no centro e um decaimento rápido. Se ,
então a interpolação dos pontos de amostragem é alcançada (FERREIRA, 2003). Como
as funções peso em geral não atendem a essa última condição, o MMQM aproxima os
pontos da amostragem, ainda assim o método é frequentemente referido como uma
interpolação. LANCASTER e SALKAUSKAS (1981) propõem a introdução de
singularidades nas funções peso para garantir a condição de interpolação.
Para ser válida, a função peso deve atender às seguintes exigências
(MONAGHAN, 1982):
(Positividade) dentro do domínio Ω
fora do domínio Ω
deve ser um função monótona decrescente, a partir do
centro.

30
quando
Existem inúmeras funções que atendem às condições descritas acima. Serão
apresentadas a seguir três das funções mais utilizadas.
Função Gaussiana Simples
Tem a seguinte fórmula geral para o caso bidimensional:
Onde é a amplitude
e são constantes
A função para , considerando y=cte=0 e centrada em xj=5, está
representada graficamente na figura 3-8.
Figura 3-8 Função Gaussiana Simples
Função Gaussiana com Raio
Tem a seguinte fórmula geral:
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
w(x
)
Função Gaussiana Simples y=0 0<x<10

31
Sendo P o ponto em estudo,
Pj o centro do suporte
a distância euclidiana entre os dois pontos
Rj é o raio adotado para o suporte
c uma constante arbitrária
A função com variáveis (x,y) para , Rj=5 considerando y=cte=0 e
centrada em xj=5 está representada na figura 3-9.
Figura 3-9 Função Gaussiana com Raio
Função Spline
Tem a seguinte fórmula geral:
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
w(x
)
Função Gaussiana com Raio=5 y=0 0<x<10

32
A função com variáveis (x,y) para Rj=5 considerando y=cte=0 e centrada em xj=5
está representada na figura 3-10.
Figura 3-10 Função Spline
3.2.5 Aplicação do Método
Como exemplo, a mesma função utilizada no exemplo para interpolação por FBR
é analisada pelo MMQM:
para
A função Gaussiana Simples é utilizada como função peso, definida conforme
anteriormente.
Obtém-se as seguintes aproximações, para as quantidades N de pontos
igualmente espaçados no intervalo em estudo:
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
w(x
)
Função Spline com Raio=5 y=0 0<x<10

33
N= 5
Figura 3-11 Aproximação pelo MMQM para N=5
N=10
Figura 3-12 Aproximação pelo MMQM para N=10
0 1 2 3 4 5 6 7 8 9 10-10
-8
-6
-4
-2
0
2
4
6
8
x
f(x)
MMQM N=5
pontos considerados
Solução Exata
Solução Aproximada
0 1 2 3 4 5 6 7 8 9 10-10
-8
-6
-4
-2
0
2
4
6
8
x
f(x)
MMQM N=10
Pontos considerados
Solução Exata
Solução Aproximada

34
N=20
Figura 3-13 Aproximação pelo MMQM para N=20
N=40
Figura 3-14 Aproximação pelo MMQM para N=40
0 1 2 3 4 5 6 7 8 9 10-10
-8
-6
-4
-2
0
2
4
6
8
x
f(x)
MMQM N=20
Pontos considerados
Solução Exata
Solução Aproximada
0 1 2 3 4 5 6 7 8 9 10-10
-8
-6
-4
-2
0
2
4
6
8
x
f(x)
MMQM N=40
Pontos considerados
Solução Exata
Solução Aproximada

35
Figura 3-15 Erro Relativo da Aproximação para N=40
0 1 2 3 4 5 6 7 8 9 100
0.01
0.02
0.03
0.04
0.05
0.06
0.07
x
Err
o
Erro Relativo MMQM N=40

36
CAPÍTULO 4 – APLICAÇÃO DOS MÉTODOS DOS
RESÍDUOS PONDERADOS EM EQUAÇÕES DIFERENCIAIS
PARCIAIS
4.1 CONSIDERAÇÕES INICIAIS
O Método dos Resíduos Ponderados (MRP) é uma ferramenta numérica para
resolução de equações diferenciais parciais que pode ser utilizado para resoluções de
problemas com formulação forte ou fraca. O método consiste em aproximar a solução
de uma EDP por combinações de funções conhecidas com coeficientes a determinar
(LEMOS, 2007).
A substituição da aproximação na EDP gera um resíduo, a partir da distribuição
desse resíduo nos domínio e contorno do sistema é possível determinar os coeficientes
da solução aproximada. LEMOS (2007) resume o método em três etapas fundamentais:
1. Escolha da função tentativa (função de aproximação)
2. Escolha de um critério de ponderação para o cálculo da média ponderada
do resíduo
3. Obtenção da solução aproximada
O mesmo trabalho ressalta que a seleção da função tentativa depende da intuição
e da experiência do usuário, o que representa a maior limitação do método.
Antes de proceder à formulação do Método dos Resíduos Ponderados, será feita
uma breve revisão da classificação das Equações Diferenciais.
4.2 CLASSIFICAÇÃO DAS EQUAÇÕES DIFERENCIAIS
As equações diferenciais podem ser classificadas como ordinárias ou parciais: a
primeira envolve apenas derivadas de uma função de uma só variável já a segunda
envolve derivadas parciais de funções de mais de uma variável.

37
Uma equação diferencial parcial (EDP) de 2ª ordem com duas variáveis
independentes x,y tem a seguinte fórmula geral, utilizando notação indicial para as
derivadas:
Onde a, b, c, d, e, f, g são constantes ou funções das variáveis independentes e
u(x,y) é também função das variáveis independentes
Os coeficientes a, b e c devem atender:
Para coeficientes a, b e c constantes, as EDPs podem ser classificadas conforme
abaixo:
Hiperbólicas: se - Ex: Equação da Onda
Parabólicas: se - Ex: Equação de Fourier
Elípticas se: - Ex: Equação de Laplace/Equação de Poisson
4.3 FORMULAÇÃO GERAL DO MRP
Dada uma equação diferencial, aplicada em um domínio Ω e contorno Γ:
Figura 4-1 Domínio e Contornos do Problema

38
Sendo um operador diferencial
u(x) e g(x) funções da variável independente x
No contorno (Γ= Γd Γn ), temos as seguinte condições:
Dirichlet em Γd (essenciais ou diretas)
Neumann em Γn (naturais)
A solução aproximada é da forma:
(4.1)
Sendo , k=1,2,...N os pontos da colocação
e a função de interpolação que dependerá do Método sem malha
aplicado
A função resíduo no domínio e no contorno surgirá da aplicação da
equação diferencial e das condições de contorno na solução aproximada.
No domínio:
(4.2a)
No contorno:
(4.2b)
(4.2c)
39
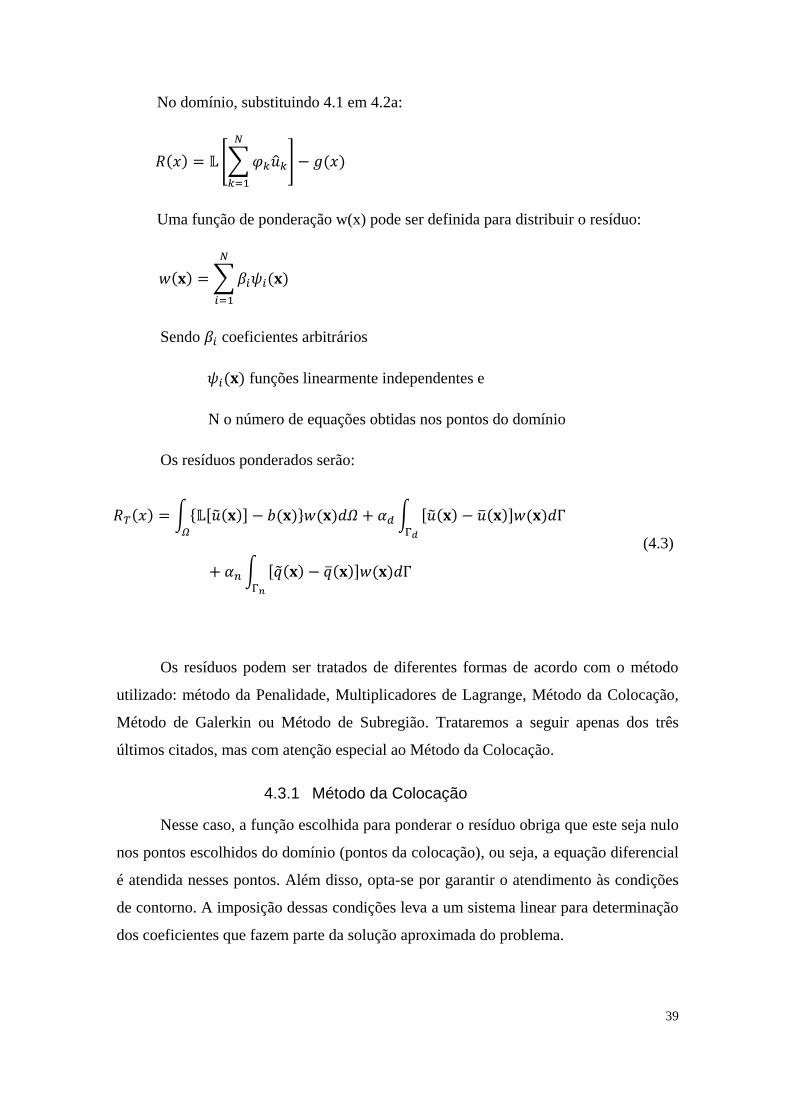
No domínio, substituindo 4.1 em 4.2a:
Uma função de ponderação w(x) pode ser definida para distribuir o resíduo:
Sendo coeficientes arbitrários
funções linearmente independentes e
N o número de equações obtidas nos pontos do domínio
Os resíduos ponderados serão:
(4.3)
Os resíduos podem ser tratados de diferentes formas de acordo com o método
utilizado: método da Penalidade, Multiplicadores de Lagrange, Método da Colocação,
Método de Galerkin ou Método de Subregião. Trataremos a seguir apenas dos três
últimos citados, mas com atenção especial ao Método da Colocação.
4.3.1 Método da Colocação
Nesse caso, a função escolhida para ponderar o resíduo obriga que este seja nulo
nos pontos escolhidos do domínio (pontos da colocação), ou seja, a equação diferencial
é atendida nesses pontos. Além disso, opta-se por garantir o atendimento às condições
de contorno. A imposição dessas condições leva a um sistema linear para determinação
dos coeficientes que fazem parte da solução aproximada do problema.

40
No contorno o resíduo será nulo, portanto o resíduo total em 4.3 será apenas o do
domínio (4.2a):
A função escolhida para ponderar a distribuição do resíduo é a seguinte:
(4.4)
Sendo constantes arbitrárias e
funções Delta de Dirac
A função Delta de Dirac tem as seguintes propriedades:
para x≠ xi
para x= xi
O produto interno do Resíduo e da Função de Ponderação, isto é, a média
ponderada do Resíduo, deve ser nulo:
(4.5)
Substituindo as expressões 4.2a e 4.4 em 4.5:
(4.6)

41
Aplicando a terceira propriedade da função Delta de Dirac, o resultado será:
(4.7)
Para a equação 4.7 temos a solução trivial ( ) ou:
(4.8)
Para i=1, ..., N
Introduzindo nesse sistema de equações (4.8) também as condições de contorno,
o sistema pode ser resolvido e assim os valores de são determinados. Em resumo, a
solução aproximada atende às condições de contorno e à equação diferencial nos pontos
da colocação.
É importante notar que a função de ponderação escolhida eliminou a necessidade
de integração do Método.
4.3.2 Método de Galerkin
No Método de Galerkin, utilizam-se as próprias funções de interpolação como
função de ponderação:
Nesse caso é necessário resolver a integral de forma numérica.
42
4.3.3 Método da Subregião ou Subdomínio
Nesse método as funções ponderadoras são a unidade, , o que equivale
a exigir que a integral do resíduo seja nula em determinados intervalos do domínio:
Para i=1, ..., N
Semelhante ao método de Galerkin, é necessário resolver a integral.

43
CAPÍTULO 5 – IMPLEMENTAÇÃO NUMÉRICA
Os métodos dos Mínimos Quadrados Móveis e da Colocação foram programados
utilizando o MATLAB (R2011a) para funções de duas variáveis. Os algoritmos
aplicados para o desenvolvimento desses programas são apresentados a seguir.
5.1 MÉTODO DOS MÍNIMOS QUADRADOS MÓVEIS
5.1.1 Dados de Entrada
O programa recebe como dados de entrada:
Coordenadas dos pontos conhecidos, na forma X = [ x1 y1 ; x2 y2; ... ; xN
yN ], matriz (N x 2)
Coordenadas dos pontos que se deseja aproximar o valor da função, na
forma Z = [ x’1 y’1 ; x’2 y’2; ... ; x’v y’v ], matriz (v x 2)
Base de Monômios escolhida (1- Base Linear / 2- Base Quadrática)

44
5.1.2 Algoritmo
LER NÚMERO DE LINHAS DAS MATRIZES X e Z
INICIALIZAR O PROCESSO ITERATIVO PARA CÁLCULO DA MENOR DISTÂNCIA ENTRE DOIS PONTOS:
DEFINIR VARIAVEL distanciamínima = 1
PARA avanço = 1,..., v FAZER:
CALCULAR DISTANCIA ENTRE (x1,y1) E ( x’avanço, y’avanço ) =
SE DISTANCIA< distanciaminima:
distanciaminima=DISTANCIA
FIM DO PARA avanço = 1,..., v FAZER
FIM DO CALCULO DA MENOR DISTANCIA ENTRE DOIS PONTOS
INICIALIZAR PROCESSO ITERATIVO PARA CÁLCULO DA FUNÇÃO APROXIMADA NO PONTO (x’I, y’I):
PARA I = 1, ..., v FAZER:
DEFINIR VARIÁVEL RAIO=distanciaminima
INICIALIZAR PROCESSO ITERATIVO PARA VERIFICAÇÃO DO RAIO:
SE QUANTIDADE DE PONTOS DENTRO DO SUPORTE DE (x’I, y’I) FOR MENOR QUE O NÚMERO MÍNIMO DE
PONTOS DE ACORDO COM A BASE (3 PARA BASE LINEAR E 6 PARA BASE QUADRÁTICA):
INCREMENTAR RAIO=RAIO*1.X E REFAZER O PROCESSO DE VERIFICAÇÃO DO RAIO
FIM DO PROCESSO DE VERIFICAÇÃO DO RAIO
INICIALIZAR PROCESSO DE MONTAGEM DAS MATRIZES W, P, u:
PARA i=1,..., N FAZER:
SE DISTANCIA ENTRE (x’I, y’I) E (xi, yi) FOR MENOR QUE RAIO:
ADICIONAR ELEMENTOS NAS MATRIZES W, P, u RELACIONADOS A (xi, yi)
FIM DO PARA i=1,..., N
FIM DO PROCESSO DE MONTAGEM DAS MATRIZES W, P, u
CALCULAR A=PT*W*P
SE A NÃO FOR INVERTIVEL:
INCREMENTAR RAIO=RAIO*1.05 E REFAZER LAÇO PARA i=1,..., N FAZER - MONTAGEM DE W, P, u
CALCULAR B
MONTAR p MATRIZ LINHA DE MONÔMIOS APLICADOS NO PONTO (x’I, y’I):
CALCULAR VALOR DA FUNÇÃO APROXIMADA=p*A-1*B*u
IMPRIMIR O VALOR DA FUNÇÃO APROXIMADA
FIM DO PARA I = 1, ..., v FAZER
FIM DO PROCESSO ITERATIVO DE CÁLCULO DA FUNÇÃO APROXIMADA NO PONTO (x’I, y’I)
FIM

45
5.2 MÉTODO DA COLOCAÇÃO
5.2.1 Dados de Entrada
O programa recebe como dados de entrada:
Coordenadas dos pontos da colocação, da forma X = [ x1 y1 ; x2 y2; ... ; xN
yN ], matriz Nx2
Base de Monômios escolhida (1- Base Linear/ 2- Base Quadrática)
5.2.2 Algoritmo
O algoritmo está reproduzido na página seguinte.

46
LER NÚMERO DE LINHAS (N) DA MATRIZ X
INICIALIZAR O PROCESSO ITERATIVO PARA CÁLCULO DA MENOR DISTÂNCIA ENTRE DOIS PONTOS:
distanciamínima = 1
PARA avanço = 1,..., N FAZER
CALCULAR DISTANCIA ENTRE (x1,y1) E ( xavanço, yavanço ) =
SE DISTANCIA< distanciaminima:
distanciaminima=DISTANCIA
FIM DO PARA avanço = 1,..., N
FIM DO CALCULO DA MENOR DISTANCIA ENTRE DOIS PONTOS.
INICIALIZAR PROCESSO ITERATIVO PARA MONTAGEM DAS MATRIZES R E Y QUE FORMARÃO O SISTEMA DE EQUAÇÕES:
INICIALIZAR MATRIZES R e Y
PARA I = 1, ..., N FAZER:
INICIALIZAR MATRIZ W, P, A, B, u
DEFINIR VARIÁVEL RAIO=distanciaminima
INICIALIZAR PROCESSO ITERATIVO PARA VERIFICAÇÃO DO RAIO:
SE QUANTIDADE DE PONTOS DENTRO DO SUPORTE DE (xI, yI) FOR MENOR QUE O NÚMERO MÍNIMO DE PONTOS
DE ACORDO COM A BASE (3 PARA BASE LINEAR E 6 PARA BASE QUADRÁTICA):
INCREMENTAR RAIO=RAIO*1.X E REFAZER O PROCESSO DE VERIFICAÇÃO DO RAIO
FIM DO PROCESSO DE VERIFICAÇÃO DO RAIO
MONTAGEM DAS MATRIZES W, P, u:
PARA i=1,..., N FAZER:
SE DISTANCIA ENTRE (xI, yI) E (xi, yi) FOR MENOR QUE RAIO:
ADICIONAR ELEMENTOS NAS MATRIZES W, P, u RELACIONADOS A (xi, yi)
CALCULAR DERIVADAS DE W
FIM DO PARA i=1,..., N MATRIZES W E SUAS DERIVADAS, P, u MONTADAS
CALCULAR A=PT*W*P
SE A NÃO FOR INVERTIVEL:
INCREMENTAR RAIO=RAIO*1.05 E REFAZER LAÇO PARA i=1,..., N FAZER - MONTAGEM DE W, P, u
CALCULAR B
MONTAR p MATRIZ LINHA DE MONÔMIOS APLICADOS NO PONTO (xI, yI)
SE PONTO (xI, yI) ESTIVER NO CONTORNO:
MONTAR PRODUTO=p*A-1*B E ARMAZENÁ-LO NA LINHA I DA MATRIZ R
ARMAZENAR VALOR DE CONTORNO NA LINHA I NA MATRIZ Y
SE NÃO:
APLICAR FUNÇÃO APROXIMADA NA EQUAÇÃO DIFERENCIAL E ARMAZENAR NA LINHA I DA MATRIZ R
ARMAZENAR 0 NA LINHA I NA MATRIZ Y
FIM DO PARA I = 1, ..., N FAZER
FIM DO PROCESSO ITERATIVO PARA MONTAGEM DAS MATRIZES R E Y
RESOLVER O SISTEMA DE EQUAÇÕES LINEARES
IMPRIMIR k
FIM

47
CAPÍTULO 6 – APLICAÇÕES NUMÉRICAS
Para as aplicações numéricas desse projeto foi utilizado um Método sem Malha
baseado na formulação do Método da Colocação utilizando o Método dos Mínimos
Quadrados Móveis para as funções de aproximação.
6.1 EQUAÇÃO DE LAPLACE
A equação de Laplace governa diversos problemas: distribuição de temperatura,
potencial (eletromagnético, gravitacional), torção em barras etc. Pode ser escrita da
seguinte forma para duas variáveis:
Duas aplicações para a equação de distribuição de temperatura são consideradas:
Em uma chapa quadrada com dois lados com temperaturas constantes e
demais lados isolados (Aplicação 1)
Em uma chapa quadrada com um dos lados com distribuição senoidal de
temperatura e demais lados isolados (Aplicação 2)
A influência do refinamento dos pontos considerados na distribuição de
temperatura será verificada, plotando as soluções exatas e aproximadas e os erros
absolutos da aproximação.
6.1.1 Aplicação 1
É considerada uma chapa quadrada de lado medindo 5m, conforme figura 6-1,
submetida às seguintes condições de contorno:

48
Figura 6-1 Geometria e Condições de Contorno do Problema
A solução exata é uma variação linear de temperatura de 100 (y=6) a 10 (y=1),
independente da variável x, representada graficamente na figura 6-2:
Figura 6-2 Solução Exata
12
34
56
12
34
5
60
20
40
60
80
100
x
Gráfico da Solução Exata
y
u(x
,y)

49
Através do Método da Colocação a função de interpolação é obtida, depois com
essa função aproxima-se o valor da função exata, avaliando essa aproximação para
x=cte= 3,5.
Em todas as simulações são aplicadas a base quadrática de monômios e a função
Gaussiana com Raio (c=100) como Função Ponderadora.
9 pontos
A distribuição de pontos de colocação, conforme figura 6-3, foi de 8 pontos nos
contornos e 1 ponto no domínio.
Figura 6-3 Distribuição de 9 Pontos
O número de pontos para formação dos suportes locais foi 9.
A distribuição de temperatura para x=3,5 é apresentada na figura 6-4.
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 61
2
3
4
5
6
x(m)
y(m
)
Distribuição dos Pontos

50
Figura 6-4 Aproximação para 9 Pontos
A seguir, a figura 6-5 apresenta os erros absolutos: .
Figura 6-5 Erro Absoluto para 9 Pontos
Máximo Erro Absoluto = 1,73 x 10-8
Menor Raio do Suporte = 2,85
16 Pontos
A distribuição de pontos de colocação, conforme figura 6-6, foi de 12 pontos nos
contornos e 4 pontos no domínio.
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 610
20
30
40
50
60
70
80
90
100
y(m)
T(°
C)
Distribuição de Temperatura N=9
Solução Aproximada
Solução Exata
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8x 10
-8
y(m)
Err
o(m
)
Erro Absoluto

51
Figura 6-6 Distribuição de 16 Pontos
O número de pontos para formação dos suportes locais variou de 8 a 11.
A distribuição de temperatura para x=3,5 é apresentada na figura 6-7.
Figura 6-7 Aproximação para 16 Pontos
A seguir, a figura 6-8 apresenta os erros absolutos: .
Máximo Erro Absoluto = 5,41x10-9
Menor Raio do Suporte = 2,47
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 61
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
x(m)
y(m
)
Distribuição dos Pontos
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60
10
20
30
40
50
60
70
80
90
100
y(m)
T(°
C)
Distribuição de Temperatura N=16
Solução Aproximada
Solução Exata

52
Figura 6-8 Erro Absoluto para 16 Pontos
25 Pontos
A distribuição de pontos, conforme figura 6-9, foi de 20 pontos nos contornos e 5
pontos no domínio.
Figura 6-9 Distribuição de 25 Pontos
O número de pontos para formação dos suportes locais variou de 16 a 19.
A distribuição de temperatura para x=3,5 é apresentada na figura 6-10.
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60
1
2
3
4
5
6x 10
-9
y(m)
Err
o(°
C)
Erro Absoluto
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 61
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
x(m)
y(m
)
Distribuição dos Pontos

53
Figura 6-10 Aproximação para 25 Pontos
A seguir são apresentados os erros absolutos (figura 6-11) e relativos (figura 6-
12).
Figura 6-11 Erro Absoluto para 25 Pontos
Máximo Erro Absoluto = 1,09x10-9
Menor Raio do Suporte = 3,07
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60
10
20
30
40
50
60
70
80
90
100
y(m)
T(°
C)
Distribuição de Temperatura N=25
Solução Aproximada
Solução Exata
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60
0.2
0.4
0.6
0.8
1
1.2x 10
-9
y(m)
Err
o(°
C)
Erro Absoluto

54
Figura 6-12 Erro Relativo para 25 Pontos
6.1.2 Aplicação 2
Nesse caso, é analisada uma chapa quadrada de lado medindo 6m, submetido às
seguintes condições de contorno:
A solução exata é da forma:
Sendo A(n):
Alternativamente:
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8x 10
-11
y(m)
Err
o
Erro Relativo
55
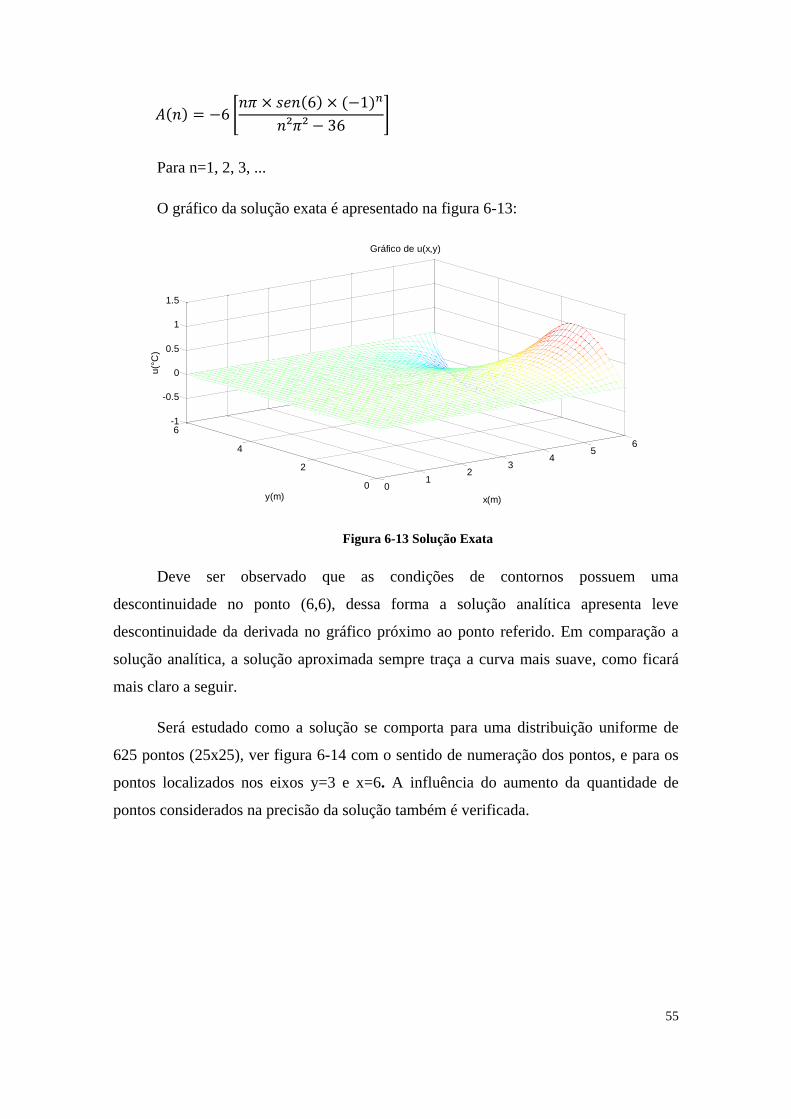
Para n=1, 2, 3, ...
O gráfico da solução exata é apresentado na figura 6-13:
Figura 6-13 Solução Exata
Deve ser observado que as condições de contornos possuem uma
descontinuidade no ponto (6,6), dessa forma a solução analítica apresenta leve
descontinuidade da derivada no gráfico próximo ao ponto referido. Em comparação a
solução analítica, a solução aproximada sempre traça a curva mais suave, como ficará
mais claro a seguir.
Será estudado como a solução se comporta para uma distribuição uniforme de
625 pontos (25x25), ver figura 6-14 com o sentido de numeração dos pontos, e para os
pontos localizados nos eixos y=3 e x=6. A influência do aumento da quantidade de
pontos considerados na precisão da solução também é verificada.
01
23
45
6
0
2
4
6-1
-0.5
0
0.5
1
1.5
x(m)
Gráfico de u(x,y)
y(m)
u(°
C)

56
Figura 6-14 Numeração dos Pontos
Através do Método da Colocação, a solução aproximada é obtida e depois
aplicada nos 625 pontos. A soma dos erros absolutos dos pontos é um indicativo da
qualidade da aproximação.
Em todas as simulações, utiliza-se a função Gaussiana com Raio como Função
Ponderadora e o parâmetro c=r/2, sendo r o raio do suporte.
168 Pontos
A distribuição de pontos, conforme figura 6-15, foi de 48 pontos nos contornos e
120 pontos no domínio.
0 1 2 3 4 5 60
1
2
3
4
5
6
x(m)
y(m
)
25 x 25 = 625 Pontos
1
25 625

57
Figura 6-15 Distribuição de 168 Pontos
A figura 6-16 apresenta o gráfico de erros absolutos da aproximação em cada
ponto.
Figura 6-16 Erro Absoluto para 168 Pontos
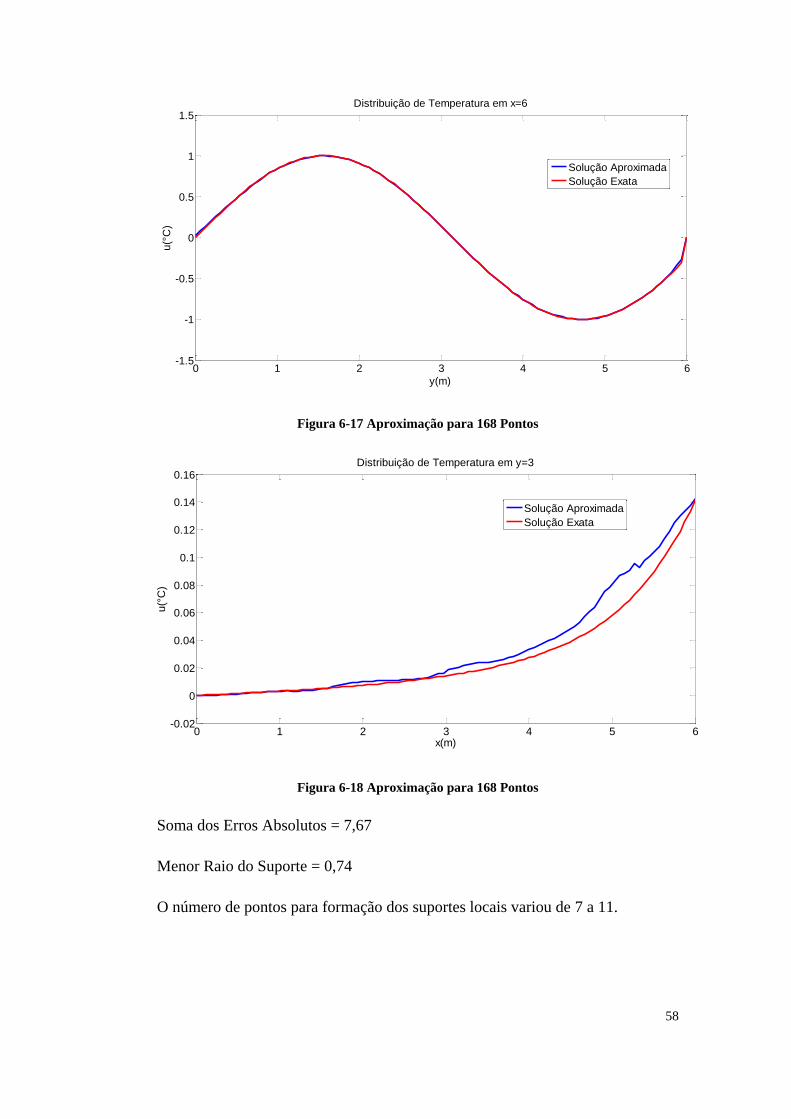
As aproximações para x=6m e y=3m são apresentadas nas figuras 6-17 e 6-18,
respectivamente.
0 1 2 3 4 5 60
1
2
3
4
5
6
x(m)
y(m
)
Distribuição dos Pontos
0 100 200 300 400 500 600 7000
0.05
0.1
0.15
0.2
0.25
Pontos
Err
o(°
C)
Erro Absoluto
58
Figura 6-17 Aproximação para 168 Pontos
Figura 6-18 Aproximação para 168 Pontos
Soma dos Erros Absolutos = 7,67
Menor Raio do Suporte = 0,74
O número de pontos para formação dos suportes locais variou de 7 a 11.
0 1 2 3 4 5 6-1.5
-1
-0.5
0
0.5
1
1.5
y(m)
u(°
C)
Distribuição de Temperatura em x=6
Solução Aproximada
Solução Exata
0 1 2 3 4 5 6-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
x(m)
u(°
C)
Distribuição de Temperatura em y=3
Solução Aproximada
Solução Exata

59
255 Pontos
A distribuição de pontos, conforme figura 6-19, foi de 60 pontos nos contornos e
195 pontos no domínio.
Figura 6-19 Distribuição de 255 Pontos
A figura 6-20 apresenta o gráfico de erros absolutos da aproximação em cada
ponto.
Figura 6-20 Erro Absoluto para 255 Pontos
0 1 2 3 4 5 60
1
2
3
4
5
6
x(m)
y(m
)
Distribuição dos Pontos
0 100 200 300 400 500 600 7000
0.005
0.01
0.015
0.02
0.025
0.03
Pontos
Err
o(°
C)
Erro Absoluto

60
As aproximações para x=6m e y=3m são apresentadas nas figuras 6-21 e 6-22,
respectivamente.
Figura 6-21 Aproximação para 255 Pontos
Figura 6-22 Aproximação para 255 Pontos
Soma dos Erros Absolutos = 1,31
Menor Raio do Suporte = 0,63
O número de pontos para formação dos suportes locais variou de 7 a 11.
0 1 2 3 4 5 6-1.5
-1
-0.5
0
0.5
1
1.5
y(m)
u(°
C)
Distribuição de Temperatura em x=6
Solução Aproximada
Solução Exata
0 1 2 3 4 5 6-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
x(m)
u(°
C)
Distribuição de Temperatura em y=3
Solução Aproximada
Solução Exata

61
440 Pontos
A distribuição de pontos, conforme figura 6-23, foi de 80 pontos nos contornos e
360 pontos no domínio.
Figura 6-23 Distribuição de 440 Pontos
A seguir, são apresentados os gráficos de erros absolutos (figura 6-24) e relativos
(figura 6-25) da aproximação em cada ponto.
Figura 6-24 Erro Absoluto para 440 Pontos
0 1 2 3 4 5 60
1
2
3
4
5
6
x(m)
y(m
)
Distribuição dos Pontos
0 100 200 300 400 500 600 7000
0.002
0.004
0.006
0.008
0.01
0.012
0.014
Pontos
Err
o(°
C)
Erro Absoluto

62
Figura 6-25 Erro Relativo para 440 Pontos
As aproximações para x=6m e y=3m são apresentadas nas figuras 6-26 e 6-27,
respectivamente.
Figura 6-26 Aproximação para 440 Pontos
0 100 200 300 400 500 600 7000
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
0.01
Pontos
Err
o
Erro Relativo
0 1 2 3 4 5 6-1.5
-1
-0.5
0
0.5
1
1.5
y(m)
u(°
C)
Distribuição de Temperatura em x=6
Solução Aproximada
Solução Exata

63
Figura 6-27 Aproximação para 440 Pontos
Soma dos Erros Absolutos = 0,41
Menor Raio do Suporte = 0,56
O número de pontos para formação dos suportes locais variou de 8 a 13.
6.2 EQUAÇÃO DE POISSON
A equação de Poisson para duas variáveis tem a seguinte forma:
Neste item, aplicações da Equação de Poisson para o caso de uma barra
engastada e livre, conforme figura 6-28, submetida ao seu peso próprio são
contempladas. A equação diferencial e as condições de contorno que governam esse
problema são as seguintes:
(força aplicada na extremidade na barra nula)
0 1 2 3 4 5 6-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
x(m)
u(°
C)
Distribuição de Temperatura em y=3
Solução Aproximada
Solução Exata

64
A última condição de contorno equivale a:
Sendo a massa específica
g a aceleração da gravidade, adotada 9,8 m/s²
E o módulo de elasticidade do material, adotado 70 kPa
L o comprimento da barra, adotado 4m
A dimensão transversal da barra é de 1 m.
Figura 6-28 Geometria e Condições de Contorno do Problema
Dois casos de massa específica são analisados:
Massa específica com variação linear (Aplicação 1)

65
Massa específica com variação senoidal (Aplicação 2)
É verificado como os deslocamentos ao longo da barra se comportam com o
refinamento dos pontos considerados, plotando as soluções exatas e aproximadas para
variações em x e os erros absolutos da aproximação.
6.2.1 Aplicação 1
A solução analítica para o peso próprio variando de forma linear é:
Em todas as simulações foi utilizada a função Gaussiana com Raio (c=100) como
Função Ponderadora.
16 Pontos
A distribuição de pontos, conforme figura 6-29, foi de 14 pontos nos contornos e
2 pontos no domínio.
Figura 6-29 Distribuição de 16 Pontos
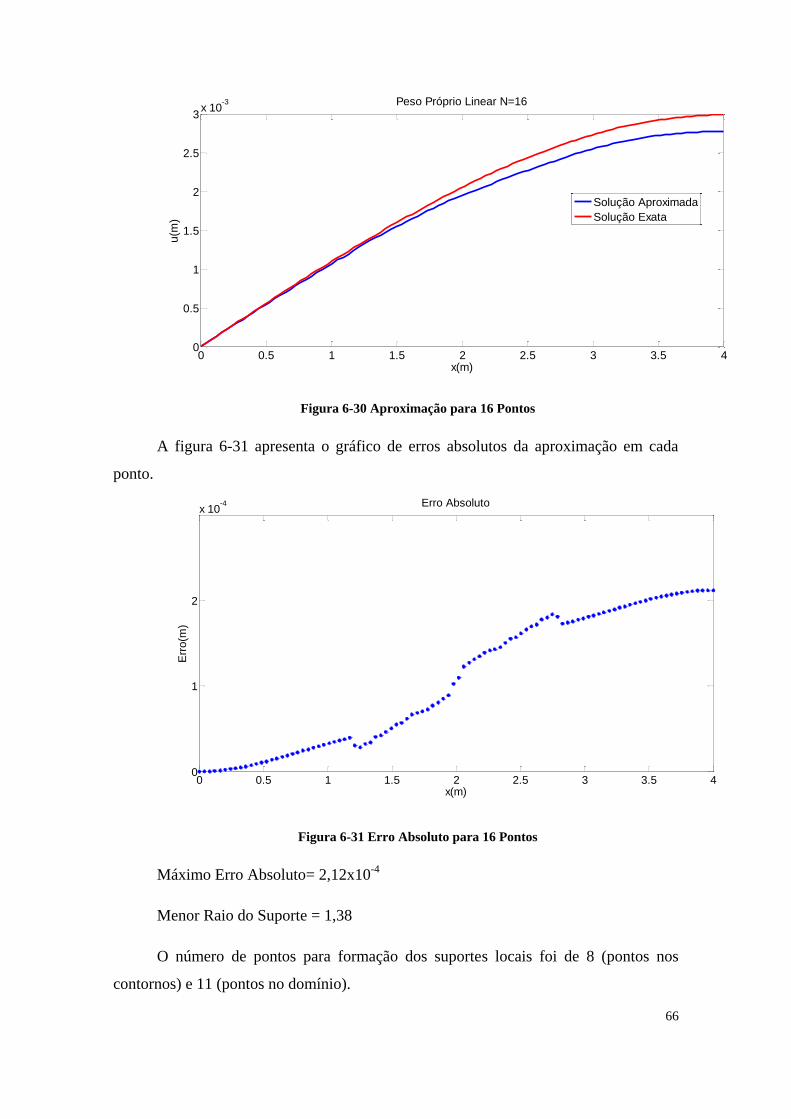
A figura 6-30 apresenta os deslocamentos ao longo do comprimento da barra.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x(m)
y(m
)
Distribuição dos Pontos
66
Figura 6-30 Aproximação para 16 Pontos
A figura 6-31 apresenta o gráfico de erros absolutos da aproximação em cada
ponto.
Figura 6-31 Erro Absoluto para 16 Pontos
Máximo Erro Absoluto= 2,12x10-4
Menor Raio do Suporte = 1,38
O número de pontos para formação dos suportes locais foi de 8 (pontos nos
contornos) e 11 (pontos no domínio).
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3x 10
-3 Peso Próprio Linear N=16
x(m)
u(m
)
Solução Aproximada
Solução Exata
0 0.5 1 1.5 2 2.5 3 3.5 40
1
2
x 10-4
x(m)
Err
o(m
)
Erro Absoluto

67
56 Pontos
A distribuição de pontos, conforme figura 6-32, foi de 24 pontos nos contornos e
32 pontos no domínio.
Figura 6-32 Distribuição de 56 Pontos
A figura 6-33 apresenta os deslocamentos ao longo do comprimento da barra.
Figura 6-33 Aproximação para 56 Pontos
0 0.5 1 1.5 2 2.5 3 3.5 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x(m)
y(m
)
Distribuição dos Pontos
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3x 10
-3
x(m)
u(m
)
Peso Próprio Linear N=56
Solução Aproximada
Solução Exata

68
A figura 6-34 apresenta o gráfico de erros absolutos da aproximação em cada
ponto.
Figura 6-34 Erro Absoluto para 56 Pontos
Máximo Erro Absoluto = 3,69x10-5
Menor Raio do Suporte = 0,53
O número de pontos para formação dos suportes locais variou de 9 a 11 pontos.
140 Pontos
A distribuição de pontos, conforme figura 6-35, foi de 40 pontos nos contornos e
100 pontos no domínio.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3
3.5
4x 10
-5
x(m)
Err
o(m
)Erro Absoluto

69
Figura 6-35 Distribuição de 140 Pontos
A figura 6-36 apresenta os deslocamentos ao longo do comprimento da barra.
Figura 6-36 Aproximação para 140 Pontos
As figuras 6-37 e 6-38 apresentam os gráficos de erros absolutos e relativos,
respectivamente, da aproximação em cada ponto.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x(m)
y(m
)
Distribuição dos Pontos
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3x 10
-3
x(m)
u(m
)
Peso Próprio Linear N=140
Solução Aproximada
Solução Exata

70
Figura 6-37 Erro Absoluto para 140 Pontos
Figura 6-38 Erro Relativo para 140 Pontos
Máximo Erro Absoluto = 1,54x10-6
Menor Raio do Suporte = 0,37
O número de pontos para formação dos suportes locais variou de 7 a 13 pontos.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6x 10
-6
x(m)
Err
o(m
)
Erro Absoluto
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5x 10
-3
Err
o
x(m)
Erro Relativo

71
6.2.2 Aplicação 2
A solução analítica para o peso próprio variando de forma senoidal é:
Adotado L= 4m.
Em todas as simulações é utilizada a função Gaussiana com Raio como Função
Ponderadora, com parâmetro c=R/2, sendo R o raio do suporte.
16 Pontos
A distribuição de pontos foi de 14 pontos nos contornos e 2 pontos no domínio
como na Aplicação 1 (item 6.2.1).
A figura 6-39 apresenta os deslocamentos ao longo do comprimento da barra.
Figura 6-39 Aproximação para 16 Pontos
A figura 6-40 apresenta o gráfico de erros absolutos da aproximação em cada
ponto.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3
3.5
4
4.5x 10
-4
x(m)
u(m
)
Peso Próprio Senoidal N=16
Solução Aproximada
Solução Exata

72
Figura 6-40 Erro Absoluto para 16 Pontos
Máximo Erro Absoluto = 2,83x10-4
Menor Raio do Suporte = 1,38
O número de pontos para formação dos suportes locais foi de 8 (pontos nos
contornos) e 11 (pontos no domínio).
56 Pontos
A distribuição de pontos foi de 24 pontos nos contornos e 32 pontos no domínio
como na Aplicação 1 (item 6.2.1).
A figura 6-41 apresenta os deslocamentos ao longo do comprimento da barra.
0 0.5 1 1.5 2 2.5 3 3.5 40
1
2
x 10-4
x(m)
Err
o(m
)
Erro Absoluto

73
Figura 6-41 Aproximação para 56 Pontos
A figura 6-42 apresenta o gráfico de erros absolutos da aproximação em cada
ponto.
Figura 6-42 Aproximação para 56 Pontos
Máximo Erro Absoluto = 3,63x10-5
Menor Raio do Suporte = 0,53
O número de pontos para formação dos suportes locais variou de 9 a 11 pontos.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3
3.5x 10
-4
x(m)
u(m
)
Peso Próprio Senoidal N=56
Solução Aproximada
Solução Exata
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3
3.5
4x 10
-5
x(m)
Err
o(m
)
Erro Absoluto

74
140 Pontos
A distribuição de pontos foi de 40 pontos nos contornos e 100 pontos no domínio
como na Aplicação 1 (item 6.2.1).
A figura 6-43 apresenta os deslocamentos ao longo do comprimento da barra.
Figura 6-43 Aproximação para 140 Pontos
A figura 6-44 apresenta o gráfico de erros absolutos da aproximação em cada
ponto.
Figura 6-44 Erro Absoluto para 140 Pontos
0 0.5 1 1.5 2 2.5 3 3.5 4-0.5
0
0.5
1
1.5
2
2.5
3
3.5x 10
-4
x(m)
u(m
)
Peso Próprio Senoidal N=140
Solução Aproximada
Solução Exata
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5x 10
-5
x(m)
Err
o(m
)
Erro Absoluto

75
Máximo Erro Absoluto = 2,06x10-5
Menor Raio do Suporte = 0,27
O número de pontos para formação dos suportes locais variou de 8 a 10 pontos.
280 Pontos
A distribuição de pontos, conforme figura 6-45, foi de 80 pontos nos contornos e
200 pontos no domínio.
Figura 6-45 Distribuição de 280 Pontos
A figura 6-46 apresenta os deslocamentos ao longo do comprimento da barra.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x(m)
y(m
)
Distribuição dos Pontos

76
Figura 6-46 Aproximação para 280 Pontos
A figura 6-47 apresenta o gráfico de erros absolutos da aproximação em cada
ponto.
Figura 6-47 Erro Absoluto para 280 Pontos
Máximo Erro Absoluto = 1,97x10-5
Menor Raio do Suporte = 0,36
O número de pontos para formação dos suportes locais variou de 21 a 28 pontos.
0 0.5 1 1.5 2 2.5 3 3.5 4-0.5
0
0.5
1
1.5
2
2.5
3
3.5x 10
-4
x(m)
u(m
)
Peso Próprio Senoidal N=280
Solução Aproximada
Solução Exata
0 0.5 1 1.5 2 2.5 3 3.5 40
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2x 10
-5
x(m)
Err
o(m
)
Erro Absoluto

77
420 Pontos
A distribuição de pontos, conforme figura 6-48, foi de 120 pontos nos contornos
e 300 pontos no domínio.
Figura 6-48 Distribuição de 420 Pontos
A figura 6-49 apresenta os deslocamentos ao longo do comprimento da barra.
Figura 6-49 Aproximação para 420 Pontos
As figuras 6-50 e 6-51 apresentam os gráficos de erros absolutos e relativos,
respectivamente, da aproximação em cada ponto.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x(m)
y(m
)
Distribuição dos Pontos
0 0.5 1 1.5 2 2.5 3 3.5 4-0.5
0
0.5
1
1.5
2
2.5
3
3.5x 10
-4
x(m)
u(m
)
Peso Próprio Senoidal N=420
Solução Aproximada
Solução Exata

78
Figura 6-50 Erro Absoluto para 420 Pontos
Figura 6-51 Erro Relativo para 420 Pontos
Máximo Erro Absoluto = 2,26x10-6
Menor Raio do Suporte = 0,186
O número de pontos para formação dos suportes locais variou de 9 a 17 pontos.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5x 10
-6
x(m)
Err
o(m
)
Erro Absoluto
0 0.5 1 1.5 2 2.5 3 3.5 40
1
2
3
4
5
6
7
8
9x 10
-3
x(m)
Erro Relativo
Err
o

79
6.3 EQUAÇÃO DA ONDA
A equação da onda no domínio do tempo é da forma:
(6.1)
Onde é o potencial, é a fonte e c é a velocidade de
propagação da onda.
Para passar a equação para o domínio da frequência (independente do tempo)
considera-se a seguinte separação de variáveis:
(6.2)
onde a função do tempo é considerada harmônica:
(6.3)
Sendo a frequência angular e
Portanto, a expressão do potencial pode ser reescrita substituindo 6.3 em 6.2. De
forma análoga, a fonte pode ser expressa da seguinte forma:
(6.4)
(6.5)
Substituindo 6.4 e 6.5 na equação 6.1:
(6.6)

80
Definindo o número de onda k como:
(6.7)
Onde f é a frequência em Hz.
Finalmente obtém-se a equação no domínio da frequência, conhecida como
Equação de Helmholtz:
(6.8a)
Utilizando o operador de Laplace ( ), a equação pode ser reescrita como:
(6.8b)
Onde é o potencial e é uma fonte harmônica.
A situação a ser analisada é uma sala quadrada de lado 6m onde uma onda
acústica se propaga, sujeita às seguintes condições de contorno (potencial de velocidade
não nulo em uma parede e duas paredes com isolamento acústico):
A velocidade da onda é adotada c=343 m/s e considera-se a frequência para os
seguintes valores f= 0,1 Hz, 20 Hz e 50 Hz.
A solução exata para esse problema é:

81
Como a solução varia apenas com a variável x, a aproximação é avaliada para o
plano y=3.
6.3.1 Frequência de 0,1 Hz
Para este caso, emprega-se uma distribuição de 32 pontos, conforme figura 6-52,
sendo 16 no contorno e 16 no domínio.
A função Gaussiana com Raio foi aplicada como função de ponderação com
c=100.
Figura 6-52 Distribuição de 32 Pontos
Na figura 6-53, estão os gráficos das soluções exata e aproximada.
0 1 2 3 4 5 60
1
2
3
4
5
6
x(m)
y(m
)
Distribuição dos Pontos

82
Figura 6-53 Aproximação para 32 Pontos
As figuras 6-54 e 6-55 apresentam os gráficos de erros absolutos e relativos,
respectivamente, da aproximação em cada ponto.
Figura 6-54 Erro Absoluto para 32 Pontos
0 1 2 3 4 5 6-50
0
50
100
150
200
250
300
350
x(m)
u
Frequência f=0,1 Hz
Solução Aproximada
Solução Exata
0 1 2 3 4 5 60
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
-5
x(m)
Err
o
Erro Absoluto

83
Figura 6-55 Erro Relativo para 32 Pontos
Máximo Erro Absoluto = 4,53x10-5
Menor Raio do Suporte = 1,86
O número de pontos para formação dos suportes locais variou de 7 a 9 pontos.
6.3.2 Frequência 20 Hz
Para este caso, emprega-se uma distribuição de 323 pontos, conforme figura 6-
56, sendo 68 no contorno e 255 no domínio.
A função Gaussiana com Raio foi aplicada como função de ponderação com
c=R/2, sendo R, os raios dos suportes considerados.
0 1 2 3 4 5 60
0.5
1
1.5
2
2.5
3x 10
-6
x(m)
Err
o
Erro Relativo

84
Figura 6-56 Distribuição de 323 Pontos
Na figura 6-57, estão os gráficos das soluções exata e aproximada.
Figura 6-57 Aproximação para 323 Pontos
As figuras 6-58 e 6-59 apresentam os gráficos de erros absolutos e relativos,
respectivamente, da aproximação em cada ponto.
0 1 2 3 4 5 60
1
2
3
4
5
6
x(m)
y(m
)
Distribuição dos Pontos
0 1 2 3 4 5 60
50
100
150
200
250
300
350
400
x(m)
u
Frequência f=20 Hz
Solução Aproximada
Solução Exata

85
Figura 6-58 Erro Absoluto para 323 Pontos
Figura 6-59 Erro Relativo para 323 Pontos
Máximo Erro Absoluto = 0,54
Menor Raio do Suporte = 0,56
O número de pontos para formação dos suportes locais variou de 8 a 11 pontos.
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
0.6
0.7
x(m)
Err
o
Erro Absoluto
0 1 2 3 4 5 60
1
2
3
4
5
6
7x 10
-3
x(m)
Err
o
Erro Relativo

86
6.3.3 Frequência de 50 Hz
Para este caso, emprega-se uma distribuição de 399 pontos, conforme figura 6-
60, sendo 76 no contorno e 323 no domínio.
A função Gaussiana com Raio foi aplicada como função de ponderação com
c=R/3, sendo R, os raios dos suportes considerados.
Figura 6-60 Distribuição de 399 Pontos
Na figura 6-61, estão os gráficos das soluções exata e aproximada.
Figura 6-61 Aproximação para 399 Pontos
0 1 2 3 4 5 60
1
2
3
4
5
6
x(m)
y(m
)
Distribuição dos Pontos
0 1 2 3 4 5 6-500
-400
-300
-200
-100
0
100
200
300
400
500
x(m)
u
Frequência f=50 Hz
Solução Aproximada
Solução Exata

87
As figuras 6-62 e 6-63 apresentam os gráficos de erros absolutos e relativos,
respectivamente, da aproximação em cada ponto.
Figura 6-62 Erro Absoluto para 399 Pontos
Figura 6-63 Erro Relativo para 399 Pontos
Máximo Erro Absoluto = 1,36
Menor Raio do Suporte = 0,96
O número de pontos para formação dos suportes locais variou de 17 a 48 pontos.
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
x(m)
Err
oErro Absoluto
0 1 2 3 4 5 60
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
x(m)
Err
o
Erro Relativo

88
6.4 ANÁLISE DOS RESULTADOS
A tabela 6.4.1 resume os resultados das aplicações numéricas e os parâmetros
mais relevantes.
Os resultados obtidos foram satisfatórios, os erros relativos foram sempre
menores que 1% exceto para a última aplicação da Equação de Helmholtz, em que os
maiores erros verificaram-se em pontos cujos valores reais são próximos de zero, o que
causa distorções nos erros relativos; fora desses pontos a grande maioria apresentou
erros menores que 0,5%.
Os exemplos feitos para esse projeto evidenciaram dois fatores relevantes para as
respostas obtidas pela aproximação, a saber, o parâmetro c da Função Gaussiana com
Raio e o incremento aplicado no Raio para que se atinja o número mínimo de pontos
para formação do suporte. Por esse motivo, na descrição do algoritmo no Capítulo 5, o
incremento foi definido genericamente como 1.X.
Em todas as aplicações desse projeto, esses dois fatores mencionados
invariavelmente apresentaram forte influência sobre a qualidade do método. Entretanto
para basear as análises a seguir, mostramos apenas para um caso como esses fatores
afetam o resultado.
Parâmetro c
Para fins de comparação, apresentamos na figura 6-64 a aproximação para a
Equação de Helmholtz com f=50 Hz, com os mesmos parâmetros utilizados em 6.3.3
alterando apenas o parâmetro c para c=100.
1 (5x5)
2 (6x6)
1(4x1)
2(4x1)
f=0,1 Hz(6x6)
f=20 Hz(6x6)
f=50 Hz(6x6)
*R= Raio do Suporte
Tabela 6.4.1 - Resumo dos Resultados
AplicaçãoMáximo Número de
Pontos Utilizados
Máximo Erro
Relativo (%)Parâmetro c
Número de Pontos
para Suporte Local
Incremento do
Raio
1,05
440 0,97 R/2 8-13 1,4
Equação de
Laplace
25 0,00 100 16-19
1,4
420 0,87 R/2 9-17 1,25
Equação de
Poisson
140 0,20 100 8-10
1,7
1,05
323 0,62 R/2 8-11 1,1Equação de
Helmholtz
32 0,00 100 7-9
399 3,75 R/3 19-54

89
Figura 6-64 Aproximação para 399 Pontos
A aproximação visivelmente perde muita precisão, isso nos leva a analisar com
mais atenção a função Gaussiana com Raio para diferentes valores de c. Para isso,
plotamos a função com centro em x=5 e raio R=5 para 3 valores distintos de c, c=100
(figura 6-65), c=R/2 (figura 6-66) e c=R/5 (figura 6-67).
Figura 6-65 Gaussiana com Raio c=100
0 1 2 3 4 5 6-1500
-1000
-500
0
500
1000
1500
x(m)
u
Equação de Helmholtz f= 50 Hz - c=100
Solução Aproximada
Solução Exata
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Função Gaussiana com Raio c=100
x
w(x
)
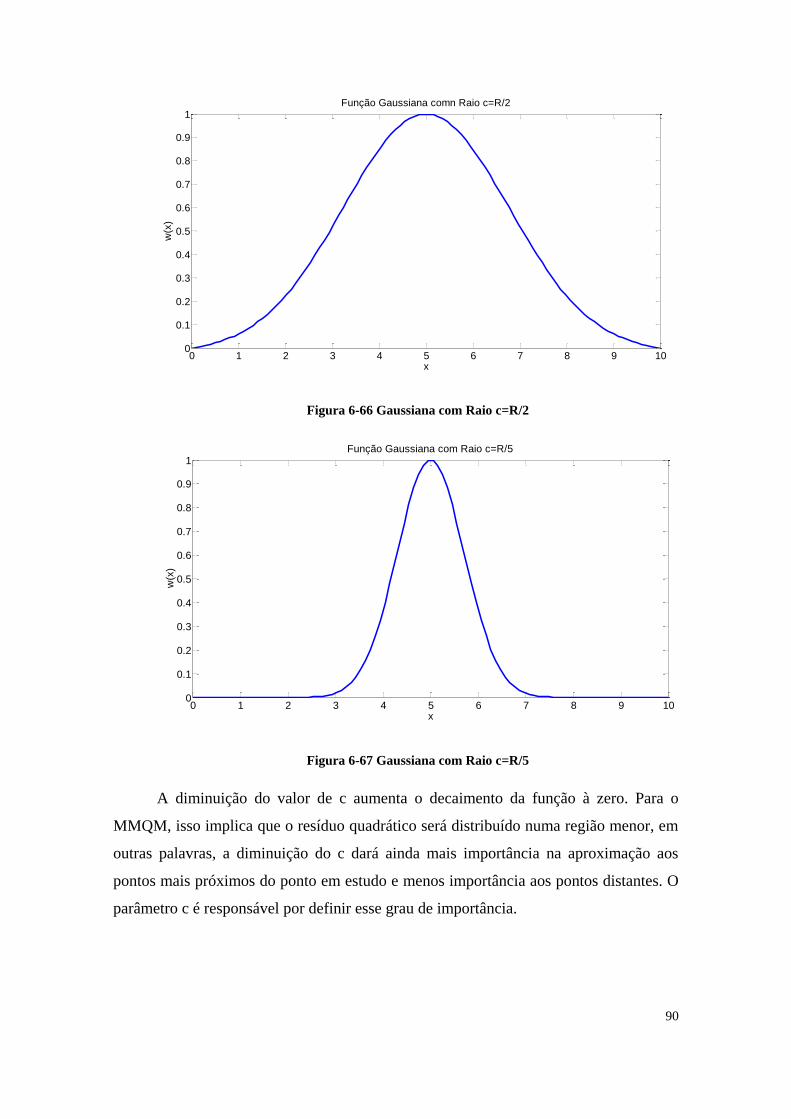
90
Figura 6-66 Gaussiana com Raio c=R/2
Figura 6-67 Gaussiana com Raio c=R/5
A diminuição do valor de c aumenta o decaimento da função à zero. Para o
MMQM, isso implica que o resíduo quadrático será distribuído numa região menor, em
outras palavras, a diminuição do c dará ainda mais importância na aproximação aos
pontos mais próximos do ponto em estudo e menos importância aos pontos distantes. O
parâmetro c é responsável por definir esse grau de importância.
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
w(x
)
Função Gaussiana comn Raio c=R/2
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
w(x
)
Função Gaussiana com Raio c=R/5

91
Analisando os gráficos acima, para c=100 o ponto x=3 terá w(x) 0,8, já para
c=R/2 w(x) 0,5 e para c=R/5 w(x) 0,03, ou seja, há uma perda progressiva da
importância do ponto de amostragem xj=5 no suporte do ponto x=3.
Para funções que apresentam variações significativas de valor, caso da Aplicação
2 de Laplace (item 6.1.2) e da Equação de Helmholtz com f=50 Hz (item 6.3.3), a
definição de um parâmetro c reduzido, R/2 e R/3 respectivamente, garantiu que o
método reproduzisse com sucesso as variações da solução analítica. Já para funções
sem variações acentuadas, caso da Aplicação 1 de Laplace (item 6.1.1) e da Equação de
Helmholtz com f=0,1 Hz (item 6.3.1), que possuem soluções lineares em uma direção, o
parâmetro c não impacta decisivamente na qualidade da aproximação.
Incremento do Raio
Novamente para fins de comparação, apresentamos na figura 6-68 a Aplicação 2
da Equação de Poisson com 420 pontos (item 6.2.2) alterando apenas o incremento do
raio para 1,4.
Figura 6-68 Aproximação para 420 Pontos
Menor Raio do Suporte (Incremento de 1,4) = 0,1882
Máximo Erro Absoluto (Incremento de 1,4) = 4.7029x10-6
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3
3.5x 10
-4
x(m)
u(m
)
Peso Próprio Senoidal N=420 - Incremento = 1,4
Solução Aproximada
Solução Exata

92
Menor Raio do Suporte (Incremento de 1,25) = 0,1863
Máximo Erro Absoluto (Incremento de 1,25) = 2,2570x10-6
O número de pontos para formação dos suportes locais variou de 9 a 18 pontos,
sendo que apenas dois pontos no contorno tiveram suporte de 18 pontos. Para
incremento de 1,25, o número de pontos para formação dos suportes locais variou de 9 a
17 pontos.
A figura 6-69 mostra os novos erros absolutos.
Figura 6-69 Erro Absoluto para 420 Pontos
Ressalta-se que os erros cresceram globalmente, não se verificou um aumento
localizado dos erros.
O aumento do incremento implicou no pequeno aumento dos Raios dos Suportes,
mas isso não implicou no aumento do número de pontos de cada suporte, já que a
diferença entre os incrementos é pequena. Apenas para dois pontos no contorno o
número de pontos do suporte local aumentou, de 17 para 18. A variação do raio do
suporte reflete no valor da função peso para cada ponto.
As aplicações numéricas feitas sugerem que a faixa de variação dos incrementos
com melhores resultados é de 1,05 a 1,9, mas nada de definitivo pode-se concluir.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
-6
x(m)
u(m
)
Erro Absoluto

93
CONCLUSÃO
Esse trabalho teve dois objetivos principais: fazer uma breve introdução aos
Métodos sem Malha e aplicar um desses métodos a problemas governados por equações
diferenciais parciais.
Para o primeiro objetivo, foram apresentados os conceitos básicos, exemplos de
métodos e a evolução cronológica dessa área de conhecimento.
Na segunda parte, foram apresentados dois métodos de interpolação para
Métodos sem Malha, a interpolação por Funções de Base Radial e o Método dos
Mínimos Quadrados Móveis, com foco nesse último. O Método dos Resíduos
Ponderados para resolução de Equações Diferenciais Parciais foi detalhado com
especial atenção ao Método da Colocação.
Foi formulado um Método sem Malha, utilizando o MMQM com Método da
Colocação. Essa formulação forte foi implementada com o uso do software MATLAB
(R2011a) e foi testada para diversos problemas de engenharia.
Os resultados obtidos foram satisfatórios provando a eficiência do método, que
não apresenta grandes custos computacionais, as fases mais custosas são a inversão da
matriz A, que tem seu condicionamento relacionado ao Raio do Suporte, e a resolução
de um sistema de equações lineares, que se estiver bem formulado pode ser resolvido
por métodos computacionais convencionais. Nos programas desenvolvidos, foi aplicado
o Método de Fatoração LU com Pivoteamento Parcial.
Estudos mais aprofundados da influência do parâmetro c na Função Gaussiana
com Raio para o MMQM podem permitir a automação da escolha do valor de c de
acordo com o problema. Não foi o escopo desse trabalho, que utilizou apenas uma
função Peso, mas um estudo comparativo das diferentes funções peso também pode
aprimorar o método.
Por último, ficou comprovado que a definição dos Raios para formação dos
suportes locais tem papel central nesse tipo de método, por isso devem ser o foco de
trabalhos futuros.

94
REFERÊNCIAS BIBLIOGRÁFICAS
BABUSKA, I., MELENK, J. M., 1995, The Partition of unity finite element
method. Technical Report BN-1185, Institute for Physical Science and Technology,
University of Maryland.
BABUSKA, I., BANERJEE, U., OSBORN, J. E., et al., 2009, “Effects of
numerical integration on meshless methods”, Computer Methods in Applied Mechanics
and Engineering, v. 198, n. 37 (Aug.), pp 2886-2897.
BARROS, F.B., 2002, Métodos sem Malha e Método dos Elementos Finitos
Generalizado em Análise não-Linear de Estruturas. Tese de D.Sc., Escola de
Engenharia de São Carlos/USP, São Carlos, SP, Brasil.
BELYTSCHKO, T., LU, Y.Y., GU, L., 1994, “Element Free Galerkin methods”,
International Journal for Numerical Methods in Engineering, v. 37, n.2 (Jan), pp 229-
256.
BELYTSCHKO, T., KRONGAUZ, Y., ORGAN, D., et al., 1996, “Meshless
Methods: An Overview and Recent Developments”, Computer Methods in Applied
Mechanics and Engineering, v. 139, n.1-4 (Dec), pp 3-47.
DUARTE, C.A., 1995, A Review of Some Meshless Methods to Solve Partial
Differencial Equations, Technical Report 06, Texas Institute for Computational and
Applied Mathematics, University of Texas at Austin,Austin, USA.
DUARTE, C.A., ODEN, J.T., 1995, Hp Clouds – A Meshless Method to Solve
Boundary-Value Problem. Technical Report 05, Texas Institute for Computational and
Applied Mathematics, University of Texas at Austin, Austin, USA.
DUARTE, C.A., 1996, The hp-cloud method. Tese de D.Sc., University of Texas
at Austin, Austin, USA.
FERREIRA, C.A., 2003 Um algoritmo para reconstrução de curvas a partir de
pontos esparsos. Tese de M.Sc., Pontifícia Universidade Católica do Rio de Janeiro, Rio
de Janeiro, RJ, Brasil.

95
HARDY, R.L., 1971, “Multiquadric equations of topography and other irregular
surfaces”, Journal of Geophysical Research, v. 76, n.8 (March), pp 1905-1915.
KANSA, E.J., 1990, “Multiquadrics – A scattered data approximation scheme
with applications to computational fluid-dynamics – II: Solutions to parabolic,
hyperbolic and elliptic partial differential equations”, Computer & Mathematics with
Applications, v. 19, n. 8-9 (Jun), pp 147-161.
KEE, B.B.T., LIU, G.R., LU, C., 2007, “A regularized least-squares radial point
collocation method (RLS-RPCM) for adaptive analysis”, Computational Mechanics, v.
40, n. 5 (Nov), pp 837-853.
KHOSRAVIFARD, A., HEMATIYAN, M. R., 2010, “A new method for
meshless integration in 2D and 3D Galerkin meshfree methods”, Engineering Analyis
with Boundary Elements, v.34, n.1 (Jan), pp 30-40.
LANCASTER, P., SALKAUSKAS, K., 1981, “Surfaces Generated by Moving
Least Squares Methods”, Mathematics of Computation, v. 37, n. 155 (July), pp 141-158.
LEMOS, E.M., 2007, Implementação dos Métodos dos Resíduos Ponderados por
Quadraturas Gaussianas. Tese de M. Sc., COPPE/Universidade Federal do Rio de
Janeiro, Rio de Janeiro, RJ, Brasil
LIU, G.R., KEE, B.B.T., 2006, “A stabilized least-squares radial point
collocation method (LS-RPCM) for adaptive analysis”, Computer Methods in Applied
Mechanics and Engineering, vol. 195, n.37 (July), pp 4843-4861.
LIU, G.R., 2010, Meshfree Methods: moving beyond the Finite Elements
Method. 2 ed. Boca Raton, CRC Press.
LIU, W.K., CHEN, Y., CHANG, C.T., et al., 1996, “Advances in multiple scale
kernel particle methods”, Computational Mechanics, v.18, n.2 (Jan), pp 73-111.
LUCY, L.B., 1977, “A Numerical approach to the testing of the fission
hypothesis”, The Astronomical Journal, v.82, n. 12 (Dec), pp 1013-1024.

96
MICCHELLI, C.A., 1986, “Interpolation of scattering data: distance matrices
and conditionally positive definite functions”, Constructive Approximation, v.2, n.1
(Dec). pp 11-22.
MONAGHAN, J.J., 1982, “Why particle methods work”, SIAM Journal of
Scientific and Statistical Computing, v.3, n.4 (Jan), pp 422-433.
NAYROLES, B., TOUZOT, G., VILLON, P., 1992, “Generalizing the finite
element method: diffuse approximation and diffuse elements”, Computational
Mechanics, v. 10, n. 5 (Jan), pp 307-318.
ONATE, E., IDELSOHN, S., ZIENKIEWICZ, O.C., et al., 1996, “A finite point
method in computational mechanics applications to convective transport and fluid
flow”, International Journal for Numerical Methods in Engineering, v. 39, n.22 (Nov),
pp 3839-3866.
RACZ, D., BUI, T. Q., 2012, “Novel adaptive meshfree integration techniques in
meshless methods”, International Journal for Numerical Methods in Engineering, v. 90,
n. 11 (Jun), pp 1414-1434.
RIVLIN, T.J., 1969, An Introduction to the Approximation of Functions, 1 ed.,
Waltham, Massachusetts, Blaisdell Publishing Company.
RUGGIERO, M. A. G., LOPES, V. L. R., 1996, Cálculo Numérico: Aspectos
Teóricos e Computacionais. 2 ed. São Paulo, MAKRON Books.
SLADEK, J., STANAK, P., HAN, Z-D., et al., 2013, “Applications of the MLPG
Method in Engineering & Sciences: A Review”, Computer Modeling in Engineering &
Sciences, v.92, n.5, pp 423-475.




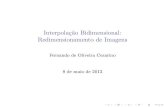

![[Dornélio] Exercícios - Interpolação](https://static.fdocumentos.com/doc/165x107/55cf92fa550346f57b9ad700/dornelio-exercicios-interpolacao.jpg)