Cap3-Caracterizacao tempo frequencia sistemas sinais-Sinais e Sistemas 2 - Capítulo 3*:...
50
- Sinais e Sistemas 2 - Capítulo 3*: Caracterização no tempo e na frequência dos sinais e sistemas *baseado no capítulo 6 do livro “Sinais e Sistemas”, Oppenheim, A. V.; 2ª Edição.
Transcript of Cap3-Caracterizacao tempo frequencia sistemas sinais-Sinais e Sistemas 2 - Capítulo 3*:...

- Sinais e Sistemas 2 -
Capítulo 3*: Caracterização no tempo e na frequência dos sinais e sistemas
*baseado no capítulo 6 do livro “Sinais e Sistemas”, Oppenheim, A. V.; 2ª Edição.

Introdução
2
• Vantagens análise por frequência
• TF representada como magnitude e fase em tempo discreto e contínuo
– Para sistemas:
Equações diferenciais e de diferenças e operações de convolução. Operações algébricas
(Domínio do tempo)(Domínio da frequência)
Filtragem seletiva em frequênciaÉ visualizada de forma simples e imediata
no domínio da frequência.
( ) ( ) ( )ωωω jXjejXjX
∠= ( ) ( ) ( )ωωω jeXjjjeeXeX
∠=
( ) ( ) ( )ωωω jXjHjY =
( ) ( ) ( )ωωω jjj eXeHeY =
( ) ( ) ( )ωωω jXjHjY =
( ) ( ) ( )ωωω jXjHjY ∠+∠=∠
Temp. contí.

• Relação
3
( ) ( ) ( )ωωω jXjHjY =
( ) ( ) ( )ωωω jjj eXeHeY =

• As relações de fase possuem um efeito significativo sobre a natureza dosinal x(t).
• Dependendo de qual seja a função dessa fase, pode-se obter sinais deaparência muito diferente, mesmo que a função de magnitude permaneçainalterada.
• Exemplo:
4
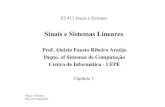
Fase de um sinal/sistema
( ) ( ) ( ) ( )321 6cos3
24cos2cos
2
11 φπφπφπ ++++++= ttttx
(a) ϕ1 = ϕ2 = ϕ3 = 0.
(b) ϕ1 = 4 rad,
ϕ2 = 8 rad,
ϕ3 = 12 rad.
(c) ϕ1 = 6 rad,
ϕ2 = -2,7 rad,
ϕ3 = 0,93 rad.
(d) ϕ1 = 1,2 rad,
ϕ2 = 4,1 rad,
ϕ3 = -7,02 rad.

• |H(f)| = “Ganho” do sistema (ponderação da magnitude)
• <X(jω) = deslocamento de fase
• Fase linear– Exemplo:
• Fase não-linear as componentes exponenciais complexas da entrada serão deslocadas
resultando em uma mudança nas fases relativas.
O sinal obtido pode ser consideravelmente diferente do sinal de entrada.
5
( ) ( ) 0 ,1 tjHjH ωωω −=∠=
( ) ( )0ttxty −=

6
Entrada x(t) Fase linear: ver y(t) considerando H1(jω) = e-jωno
( ) ( )ωω jHjejH 2
2
∠=Fase não-linear: y(t) considerando ( ) ( ) 0
23
tjejHjH
ωωω −=
Exemplo: considere um sinal x(t) que é aplicado a sistemas com fase linear e nãolinear mas todos com |H(jw)|=1:

7
Exemplo no caso discreto: considere um sinal x(n) que é aplicado a sistemas comfase linear e não linear mas todos com |H(jw)|=1:
Sistema fase linear com ‘inclinação’ de 5
Sinal x[n]
Sistema fase não-linear
Sistema fase não-linear

• Representação em escala logarítmica
– ‘Zoom’ nos detalhes
8
Representação gráfica
20 log10 (x)Decibéis (dB)
Escala dB Escala linear
10.Log
Escala linear
20.Log
40 10.000 (ou 104) 10030 1.000 (ou 103) ~ 31.620 100 (ou 102) 1010 10 (ou 101) ~ 3.16 ~ 4 (ou ~2+2) ~ 23 ~ 2 (ou ~2+1) ~ 1.40 1 1-3 ~ 0.5 (ou ~2-1) ~ 0.7-6 ~ 0.25 (ou ~2-1) ~ 0.5
-10 0.1 0.316-20 0.01 0.1-30 0.001 0.0316-40 0.0001 0.01

9
– Facilitação de cálculos
– Diagramas de Bode
( ) ( ) ( )ωωω jXjHjY logloglog +=
( ) ( ) ( )ωωω jXjHjY =
Gráficos de 20 log�� �(�) e
∠�(�) em função de log��(�)Diagramas de Bode

10
Propriedade no domínio do tempo dos
filtros ideias
( )c
cjH
ωω
ωωω
>
≤
= 0
1
Tempo contínuo:
( )πωω
ωωω
≤<
≤
=c
cjeH
0
1
Tempo discreto:
Esses filtros possuem:
Pefeita seletividade em frequência.
Fase nula (sem distorção).

11
Tempo contínuo:
t
tsenth c
π
ω=)(
Tempo discreto:
n
nsennh c
π
ω=][

• Acréscimo fase (linear) ao filtro
• Observação:– Só sistemas causais
12
ℎ[�] = 0 ���� � < 0 e ℎ � = 0 ���� � < 0

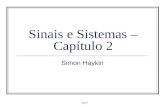
• Dificuldade em implementar filtros ideias
– Limites de tolerância:
13
ωp → Frequência da banda de passagem
ωs → Frequência de corte (ou limite) da banda de rejeição
[ωp , ωs] → Banda de Transição
δ1 → Desvio permitido na faixa de passagem
δ2 → Desvio permitido na faixa de rejeiçãoωc → Frequência de corte (-3dB )

• Pode haver também algumas especificações no domínio do tempo para o filtro:
14
tr → Tempo de subida: intervalo no qual a resposta ao degrau eleva-se até alcançar seu valor final.
Δ/Mp → Sobressinal em relação ao valor final da resposta ao degrau
ωr → Frequência de oscilação amortecida
ts → Tempo de acomodação: tempo necessário para a resposta ao degrau permanecer dentro de uma tolerância especificada dentro do seu valor final.

• Exemplo:
15
Ondulação na banda de passagem = 0,05
Ondulação na banda de rejeição = 0,05
Banda de transição: Região em torno da frequência de corte (500Hz) em que �(�) nem está dentro da faixa de 0,05 da magnitude unitária, nem dentro da faixa de 0,05 da magnitude zero.
Preço pago pela banda de transição estreita do filtro elíptico
A oscilação na resposta ao degrau é mais proeminente.

• 1ª ordem– EDO usual:
– Sistemas de ordem mais elevada: combinação de sistemas de ordem menor (uma ou duas)
– � é um número positivo
16
Sistemas de 1ª e 2ª ordem de tempo
contínuo
)()()(
txtydt
tdy=+τ
( )1
1
+=
ωτω
jjH )(
1)( tueth
t τ
τ−=

17
)(]1[)()()( tuetuthtst τ−−=∗=
A resposta ao degrau do sistema é:
Parâmetro � = Constante de tempo do sistema (controla a taxa
em que o sistema de primeira ordem responde)
Por exemplo, em � = �:• ℎ(�) atinge 1 ∕ � do seu valor em � = 0;• �(�) está a 1 ∕ � do seu valor final.
Portanto, a medida que � é diminuído, a resposta ao impulso caimais bruscamente e o tempo de subida da resposta ao degrautorna-se mais curto (sobe mais rapidamente para seu valor final).

• Resposta em frequência
– Diagrama de Bode
18
( )
[ ]1)(log10
log20
2
10
10
+−=
=
ωτ
ωjH
( )1
1
+=
ωτω
jjH )(
1)( tueth
t τ
τ−=
Relação tempo-frequência é inversa:
Se diminuir diminui tempo subida
Porém alargamos wc
τ
τω /1= dBMag 3−=
( )
>>−−
<<=
τωτω
τωω
/1 paralog20log20
/1 para,0log20
1010
10 jH

19
• 2ª ordem– EDO usual:
– Exemplo:
( ) ( ) ( ) ( )txtydt
tdy
dt
tydnnn
22
2
2
2 ωωζω =++
( ) ( ) ( ) ( )dt
tdybtkytx
dt
tydm −−=
2
2
( ) ( ) ( ) ( )txm
tym
k
dt
tdy
m
b
dt
tyd 12
2
=
+
+
m
kn =ω
km
b
2=ζ

20
– Resposta em frequência deste sistema de 2ª ordem é:
( )( ) ( ) 22
2
2 nn
n
jjjH
ωωζωω
ωω
++=
( )( ) ( )21
2
cjcjjH n
−−=
ωω
ωω
1
12
2
2
1
−−−=
−+−=
ζωζω
ζωζω
nn
nn
c
c ζ Fator de amortecimento
�� Frequência natural não amortecida

21
Para ζ ≠ 1, c1 e c2 são diferentes, e pode-se realizar uma expansão em frações parciais na forma
( )21 cj
M
cj
MjH
−−
−=
ωωω
com12
2 −=
ζ
ωnM
A resposta ao impulso correspondente para o sistema é:
( ) [ ] ( )tueeMthtctc 21 −=
Para ζ = 1, então c1 = c2 = -ωn e
( )( )2
2
n
n
jjH
ωω
ωω
+=
A resposta ao impulso correspondente para o sistema é:
( ) ( )tutetht
nnωω −= 2
10 Para << ζ �� e � são complexos
( ) ( )[ ] ( )[ ]{ } ( )tutjtjj
eth nn
t
nn
1exp 1exp12
22
2ζωζω
ζ
ω ζω
−−−−−
=−
( )[ ] ( )tute
n
t
nn
1sen1
2
2ζω
ζ
ω ζω
−−
=−

22
O sistema de 2ª ordem tem uma resposta ao impulso comcomportamento oscilatório amortecido.
10 Para << ζSistema Subamortecido
�� e � são reais e negativos, e a resposta ao impulso é a diferençaentre duas exponenciais decrescentes.
1 Para >ζSistema Superamortecido
1 Para =ζ Sistema Criticamente Amortecido�� = �

23
– Resposta ao degrau do sistema de 2ª ordem é:
( ) ( ) ( ) ( )tuc
e
c
eMtuthts
tctc
−+=∗=
21
21
1
Para ζ = 1, pode-se obter
( ) [ ] ( )tuteetst
n
t nn 1ωω ω −− −−=
• Quando subamortecido: A resposta ao degrau apresenta sobressinal(overshoot) e oscilações (ringing)
• Para ζ =1: s(t) tem a resposta mais rápida que é possível sem sobressinal e, portanto, tem o menor tempo de acomodação.
• O valor de ωn basicamente controla a escala de tempo das respostas h(t) e s(t).
• ωn é tradicionalmente chamado de frequência natural não amortecida

24
– Diagrama de Bode da resposta em frequência:
( )
+
−−=
2
2
22
1010 41log10log20nn
jHω
ωζ
ω
ωω
( )
>>+−
<<=
nn
njH
ωωωω
ωωω
paralog40log40
para,0log20
1010
10
• A assíntota de baixa frequência é a linha de 0 dB;
• A assíntota de alta frequência tem uma inclinação de –40 dB por década.
�(�) diminui 40 dB para cada aumento em � de um fator 10.ωn é conhecido como frequência de quebra/corte
( ) ( )( )
−−=∠ −
2
1
1
2
n
ntgjHωω
ωωζω
A aproximação é:
( )
n
nn
n
10
10
100,1
0,1
,
,
1log2
,0
ωω
ωωω
ωω
π
ω
ωπω
≥
≤≤
≤
−
+
−=∠
n
jH

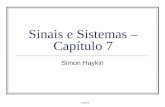
Exemplo: obtenha o diagrama de Bode para a seguinte resposta em frequência:
25
( )( ) 42
4
10100
102
++
⋅=
ωωω
jjjH
Linha sólida: diagrama de Bode realgerado por computador para20 log�� �(�)
Linha tracejada: assíntotas

26
Sistemas de 1ª e 2ª ordem de tempo
discreto
• Representação
– Tempo discreto:
– Frequência (razão polinômios e-jω)
• 1ª ordem– Equação padrão:
[ ] [ ]==
−=−M
k
k
N
k
k knxbknya00
[ ] [ ] [ ] 1 com 1 <=−− anxnayny
A resposta em frequência desse sistema é:E sua resposta ao impulso é:
( )ω
ω
j
j
aeeH
−−=
1
1 [ ] [ ]nuanhn=

27

• A resposta ao degrau é:
28
[ ] [ ] [ ] ][1
11
nua
anunhns
n
−
−=∗=
+

29
|a| determina a taxa com que o sistema de 1ª ordem responde.
Para |a| próximo de 1, essas respostas são mais lentas.

30
( )( ) 212 cos21
1
ω
ω
aaeH
j
−+=
( )
−−=∠ −
ω
ωω
cos1
sentan 1
a
aeH
j

31
Para a > 0, osistema atenua altasfrequências
Quando a < 0, osistema amplificaaltas frequências

32
• 2ª ordem– Equação modelo:
[ ] [ ] [ ] [ ]nxnyrnyrny =−+−− 21cos2 2θ
com 0 < r < 1 e 0 < θ < π.
( )ωω
ω
θ 22cos21
1jj
j
erereH
−− +−=
( )( )[ ] ( )[ ]ωθωθ
ω
jjjj
j
ereereeH
−−− −−=
11
1
Fatorando:
( )( ) ( ) ωθωθ
ω
jjjj
j
ere
B
ere
AeH
−−− −+
−=
11
θθ
θθ
sen2 ,
sen2 j
eB
j
eA
jj −
==
Também temos que:
[ ] ( ) ( )[ ] [ ]nureBreAnhnjnj θθ −+= [ ] ( )[ ] [ ]nu
nrnh
n
θ
θ
sen
1sen +=

33
Respostas ao impulso para sistemas de segunda ordem são mostrados a seguir para diferentes valores de r e θ.

34
r controla taxa de decaimento de h[n]
θ determina a frequência de oscilação.

• Já a resposta ao degrau s(t):
35

36

37

38

• Observação:
– As análises anteriores se referiam a sistemas cuja representação é dada por:
– Também é possível a representação:
– Neste caso:
39
( )ωω
ω
θ 22cos21
1jj
j
erereH
−− +−=
( )( )( )ωω
ω
jj
j
ededeH
−− −−=
21 11
1[ ] ( ) [ ] [ ] [ ]nxnyddnyddny =−+−+− 21 2121
[ ] [ ] [ ] [ ]nxnyrnyrny =−+−− 21cos2 2θ
( )ωω
ω
jj
j
ed
B
ed
AeH
−− −+
−=
21 11
12
2
21
1 ,dd
dB
dd
dA
−=
−=

• Exemplo 1: sistema de amortecimento de veículo
40
Exemplo de análises
A superfície da estrada pode ser pensada como uma superposição de
mudanças rápidas de pequena amplitude na elevação (alta frequência), representando irregularidade da superfície da estrada.
mudanças graduais na elevação (baixa frequência) devido à topografia geral.

– Matematizando ...
– Na frequência:
– Se compararmos ao formato padrão:
– Teremos:
41
( ) ( ) ( ) ( ) ( )dt
tdxbtkxtky
dt
tdyb
dt
tydM +=++
2
2
( )( ) ( ) kjbMj
bjkjH
++
+=
ωω
ωω
2
( ) ( )( ) ( ) 22
2
2
2
nn
nn
jj
jjH
ωωζωω
ωζωωω
++
+=
M
b
M
knn == ζωω 2 e

• Gera o diagrama de Bode:
42
–Observações:• A frequência de corte é controlada
por ωn,– Ou melhor: uma escolha apropriada de
constante de mola k.
• Se ωn diminui, a suspensão tende afiltrar variações mais suaves daestrada.
– Por outro lado, o tempo de subida dosistema aumenta, e assim o sistema serásentido como mais vagaroso.

43
• Exemplo 2: filtro não recursivo
[ ] [ ]−=
−++
=M
Nk
knxMN
ny1
1( ) ( )[ ] ( )[ ]
( )2/sen
2/1NMsen
1
1 2/
ω
ωωω ++
++= −MNjj
eMN
eH
Logaritmo da magnitude para M+N+1 = 33 Logaritmo da magnitude para M+N+1 = 65
Maior seletividade, maior ordem!

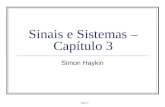
• Aplicação filtro média móvel:
44
Média móvel de 201 dias (N=M=100).

45
• O filtro de média móvel corresponde a atribuir o mesmo valor 1/(N+M+1) atodos os coeficientes.
• Exemplo: considere um filtro com N = M = 16 e os coeficientes de filtroescolhidos para serem
( )
>
≤=
32 ,0
32,33/2sen
k
kk
k
bk π
π
[ ]( )
>
≤=
32 ,0
32,33/2sen
n
nn
n
nh π
π
Os coeficientes bk podem ser ajustados de modoque o corte esteja em uma frequência desejada!

• Exemplo da escolha adequada coeficientes bk:– Método de Parks-McClellan
46

• Exercícios:
47

48

49

50