
TRABALHO 1
10
UNIVERSIDADE FEDERAL DE MINAS GERAIS ENGENHARIA MECÂNICA Teoria de Controle PRIMEIRA AVALIAÇÃO PARCIAL Aluno: Rômulo da Silva Carvalho BELO HORIZONTE 2010 Considere o sistema cuja Função de Transferência é dada por:
-
Upload
romulo-da-silva-carvalho -
Category
Documents
-
view
44 -
download
0
Transcript of TRABALHO 1

5/8/2018 TRABALHO 1 - slidepdf.com
http://slidepdf.com/reader/full/trabalho-1-559bf4bfa127b 1/10
UNIVERSIDADE FEDERAL DE MINAS GERAIS
ENGENHARIA MECÂNICA
Teoria de Controle
PRIMEIRA AVALIAÇÃO PARCIAL
Aluno: Rômulo da Silva Carvalho
BELO HORIZONTE2010
Considere o sistema cuja Função de Transferência é dada por:

5/8/2018 TRABALHO 1 - slidepdf.com
http://slidepdf.com/reader/full/trabalho-1-559bf4bfa127b 2/10
Utilizando o Programa MATLAB :
1) Plote a resposta a um Impulso do sistema (comando “impulse”).2) Plote a resposta a um degrau do sistema (comando “step”).3) Determine o ganho estático Ks do sistema em malha aberta (MA)utilizando o comando “dcgain”.4) Determine o valor de pico e o tempo de pico da resposta utilizando ocomando “max”.5) Determine os pólos do sistema em MA utilizando os comandos “pole”ou “roots”.
6) Plote a resposta em freqüência do sistema (comando “bode”).7) Determine o amortecimento e a freqüência natural do sistema em MAutilizando o comando “damp” do MatLab.8) Determine a magnitude e freqüência do(s) modo(s) de vibração dosistema.9) Determine uma representação de estados para o sistema (utilize ocomando “ssdata”).10) Escolha um valor apropriado para o período de amostragem, Ts.Explique e justifique a sua escolha.11) Com o valor para Ts escolhido no item anterior, determine a função de
transferência do sistema, Gd(z) (no domínio de “Z”) (utilize o comando“c2d”).12) Plote o modelo discreto Gd(z) obtido no item anterior para uma entradaem degrau (utilize o comando “step”).
Resolução
De acordo com os códigos do software MatLab, resolvemos aseguinte forma:
num=[8.4];
den=[0.125 0.7625 0.1325 1.6 2];

5/8/2018 TRABALHO 1 - slidepdf.com
http://slidepdf.com/reader/full/trabalho-1-559bf4bfa127b 3/10
Gs=tf(num,den);
figure;
impulse(Gs)
figure;step(Gs)
ganho=dcgain(Gs)
[mag,tempo]=step(Gs);
PicoMag=max(mag)
PicoTempo=max(tempo)
vetorPolos=pole(Gs)
figure;bode(Gs)
[vetorFrequenciaN,vetorAmortecimento]=damp(Gs)
[A,B,C,D]=ssdata(Gs)
Ts=0.05
Gz=c2d(Gs,Ts)
figure;
step(Gz)
1) Gráfico de Resposta ao Impulso

5/8/2018 TRABALHO 1 - slidepdf.com
http://slidepdf.com/reader/full/trabalho-1-559bf4bfa127b 4/10
0 5 10 15 20 25 30-1
-0.5
0
0.5
1
1.5
2
2.5x 10
7 Impulse Response
Time (sec)
A m p l i t u d e
3) Utilizando o comando “dcgain” no programa MatLab, encontra-se oganho estático Ks.
ganho = 4.2000
Ficando na forma da função transferência abaixo, este ganho podeser calculado de maneira rápida.
Segue –se para a forma:
Sendo assim este ganho é evidenciado .
4) Escolhendo-se a resposta em degrau e utilizando a declaração diferennte

5/8/2018 TRABALHO 1 - slidepdf.com
http://slidepdf.com/reader/full/trabalho-1-559bf4bfa127b 5/10
da função ste, usou se vetores “mag” e “tempo”.
Assim, utilizou-se a função max para reconhecer o máximo damagnitude, no qual foi atribuído à PicoMag, e foi reconhecido seurespectivo valor no vetor Pico Tempo.
Os valores encontrados:
PicoMag = 2.8998e+006
PicoTempo =
27.1 segundos
Confirmamos valor aproximado de acordo com o gráfico abaixo:
Step Response
Time (sec)
A m p l i t u d e
0 5 10 15 20 25 30-10
-8
-6
-4
-2
0
2
4x 10
6
System: Gs
Time (sec): 27.1
Amplitude: 2.9e+006
5) Foi utilizada a função pole e atribuído seu valor a variável “vetorPolos”, eos resultados encontrados foram:
vetorPolos =

5/8/2018 TRABALHO 1 - slidepdf.com
http://slidepdf.com/reader/full/trabalho-1-559bf4bfa127b 6/10
-6.1951
0.5305 + 1.5468i
0.5305 - 1.5468i
-0.9659
Ou seja, foram encontrados, naturalmente, 4 pólos (pois a ordem dodenominador é 4), sendo 2 deles reais, e 2 deles complexos.
6) O diagrama de bode da função transferência foi obtido utilizando afunção bode do Matlab, a qual retorna os gráficos de magnitude, em dB, eo ângulo em graus, como mostrados abaixo:

5/8/2018 TRABALHO 1 - slidepdf.com
http://slidepdf.com/reader/full/trabalho-1-559bf4bfa127b 7/10
-150
-100
-50
0
50
M a g n i t u d e ( d B )
10-2
10-1
100
101
102
-405
-360
-315
-270
P h a s e
( d e g )
Bode Diagram
Frequency (rad/sec)
7) Utilizando a função damp do MatLab, a freqüência natural do
sistema e o amortecimento foram atribuídos às variáveis vetor Frequência N e vetor Amortecimento respectivamente, e os resultados encontradosforam:
vetorFrequenciaN =
0.9659
1.6352
1.6352
6.1951
vetorAmortecimento =
1.0000
-0.3244
-0.3244
1.0000
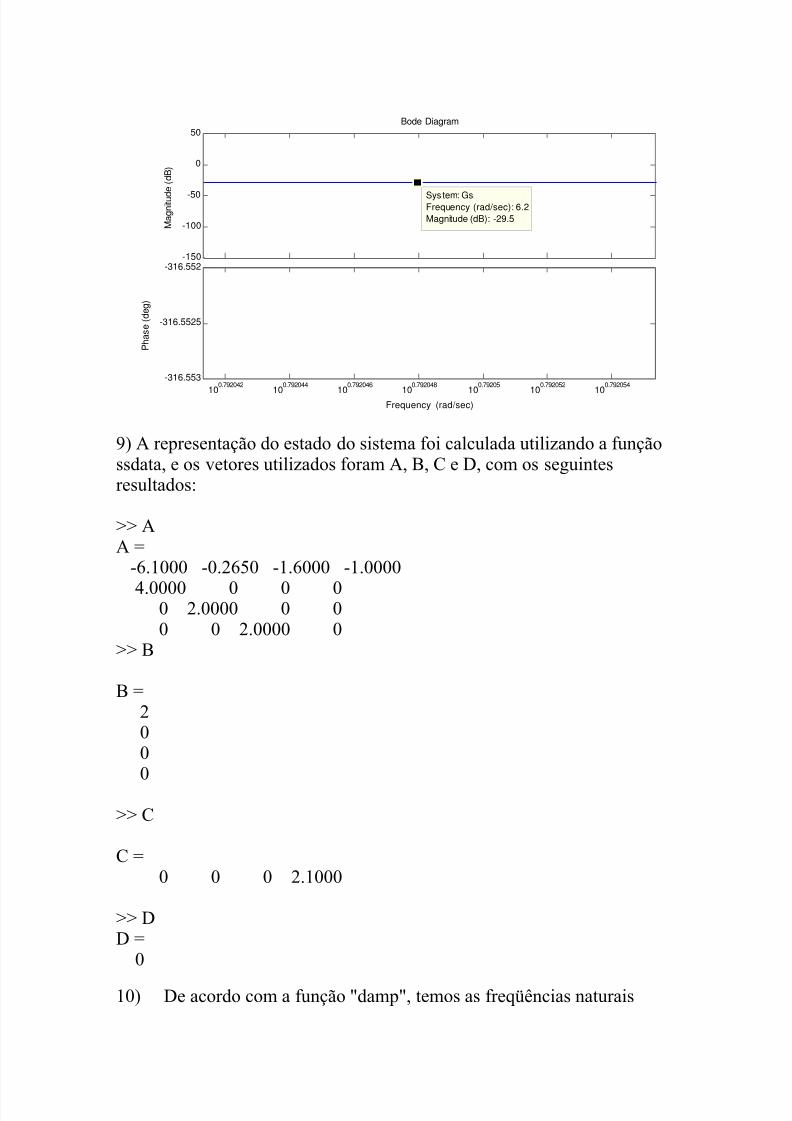
8) As freqüências dos modos de vibração do sistema, como calculado no
item 7, são:
0.9659

5/8/2018 TRABALHO 1 - slidepdf.com
http://slidepdf.com/reader/full/trabalho-1-559bf4bfa127b 8/10
1.6352
6.1951
Para tais freqüências, pode-se determinar suas magnitudes varrendoo vetor de magnitude do diagrama de bode, ou pode-se obtê-los
diretamente do diagrama, como mostrado na figura abaixo:
10-0.01511
10-0.0151
10-0.01509
10-0.01508
10-0.01507
10-0.01506
10-0.01505
10-0.01504
10-0.01503
-383.036
-383.035
-383.034
-383.033
-383.032
-383.031
P h a s e ( d e g )
Bode Diagram
Frequency (rad/sec)
9
10
11
12
13
Sys tem: Gs
Frequency (rad/sec): 0.966
Magnitude (dB): 11.8
M a g n i t u d e ( d B )
100.21355
100.21356
100.21357
100.21358
100.21359
-344.5
-344.45
-344.4
P h a s e ( d e g )
Bode Diagram
Frequency (rad/sec)
-150
-100
-50
0
50
System: Gs
Frequency (rad/sec): 1.64
Magnitude (dB): 9.96
M a g n i t u d e ( d B )
5/8/2018 TRABALHO 1 - slidepdf.com
http://slidepdf.com/reader/full/trabalho-1-559bf4bfa127b 9/10
100.792042
100.792044
100.792046
100.792048
100.79205
100.792052
100.792054
-316.553
-316.5525
-316.552
P h a s e ( d e g )
Bode Diagram
Frequency (rad/sec)
-150
-100
-50
0
50
M a g n i t u d
e ( d B )
System: GsFrequency (rad/sec): 6.2
Magnitude (dB): -29.5
9) A representação do estado do sistema foi calculada utilizando a funçãossdata, e os vetores utilizados foram A, B, C e D, com os seguintesresultados:
>> AA =
-6.1000 -0.2650 -1.6000 -1.0000
4.0000 0 0 00 2.0000 0 00 0 2.0000 0
>> B
B =200
0>> C
C =0 0 0 2.1000
>> DD =
0
10) De acordo com a função "damp", temos as freqüências naturais

5/8/2018 TRABALHO 1 - slidepdf.com
http://slidepdf.com/reader/full/trabalho-1-559bf4bfa127b 10/10
variando de 0.97Hz a 6.2Hz. Analisando o pior caso, ou seja, 6.2Hz, eutilizando o teorema de Nyquist, no qual a freqüência mínima deamostragem de um sinal é 2 vezes a freqüência do sinal, é razoávelescolher um valor acima de 13hz de amostragem, o que nos daria um Ts
próximo a 0.075s.O valor escolhido será de 0.05s, que é um valor um pouco menor que0.075s calculado, e que nos dará uma melhor resolução, sem sobrecarregar o programa com uma taxa de amostragem muito alta.
11) Escolhido o valor de Ts=0.05, foi utilizado o comando Gz=c2d(Gs,Ts) para obter a função transferência em Z mostrada abaixo:
Gz = 1.648e-005 z^3 + 0.0001709 z^2 + 0.0001608 z + 1.373e-005______________________________________________________
z^4 - 3.734 z^3 + 5.207 z^2 - 3.21 z + 0.7371
12) Finalmente, foi plotada a resposta ao degrau da função transferência Gzcalculada no item anterior:
0 5 10 15 20 25 30-10
-8
-6
-4
-2
0
2
4x 10
6 Step Response
Time (sec)
A m p l i t u d e







![Trabalho ..[1] trabalho de soldadura](https://static.fdocumentos.com/doc/165x107/559b39b21a28ab113f8b473b/trabalho-1-trabalho-de-soldadura.jpg)








![Trabalho alice[1]](https://static.fdocumentos.com/doc/165x107/5593a1081a28ab613f8b467a/trabalho-alice1.jpg)